цилиндрический линейный асинхронный двигатель для привода погружных плунжерных насосов. Линейный цилиндрический двигатель
Цилиндрические линейные двигатели HIWIN
Контактная информация
Новости
24.05.2018 | Благодарим Вас за посещение нашего стенда на выставке "Металлообработка - 2018", г. Москва.
Благодарим Вас за посещение нашего стенда на 19-й международной специализированной выставке "Оборудование, приборы и инструменты для металлообрабатывающей промышленности" - "Металлообработка - 2018", а также стенда нашего партнера - HIWIN, где мы совместно с поставщиком представили его продукцию в качестве официального дистрибьютора на терртории России. |
 Уважаемые Клиенты и Партнеры!
Уважаемые Клиенты и Партнеры! 27.04.2018 | Приглашаем посетить наш стенд на выставке "Металлообработка - 2018", г. Москва.
Компания "ЗЕТЕК" приглашает Вас посетить свой стенд № FF005 в павильоне Форум, а также стенд нашего партнера HIWIN в Павильоне 2.2, стенд №22A17 на 19-й международной специализированной выставке "Оборудование, приборы и инструменты для металлообрабатывающей промышленности" - "Металлообработка - 2018",которая будет проходить с 14 по 18 мая 2018 г. в ЦВК «Экспоцентр», г. Москва. |
 Уважаемые Клиенты и Партнеры!
Уважаемые Клиенты и Партнеры!

Цилиндрические линейные двигатели
Цилиндрические линейные двигатели HIWIN MIKROSYSTEM серии LMT имеют малый вес и высокую степень динамичности благодаря наличию первичного элемента без сердечника (якоря). В качестве вторичного элемента выступает статор с постоянными цилиндрическими магнитами. Также линейные двигатели HiwinMikro серии LMT могут применяться во всех приложениях, где необходимо наличие винтового элемента, вследствие того, что они имеют аналогичный монтажный интерфейс.

Технические характеристики линейного двигателя серий LMT2/LMT6
| Обозначение | Единица измерения | LMT2D | LMT2Q | LMT2T | LMT6D | LMT6Q | LMT6T | |
| Постоянная сила | Fc | Н | 8 | 16 | 12 | 17 | 35 | 26 |
| Постоянный ток | lc | Аср | 1.4 | 1.3 | ||||
| Пиковая сила для 1 сек. | Fp | H | 32 | 64 | 48 | 68 | 140 | 104 |
| Пиковый ток для 1 сек. | lp | Aср | 5.6 | 5.2 | ||||
| Постоянная силы | Kf | Н/Аср | 5.7 | 8.6 | 13.4 | 26.8 | 20.1 | |
| Электрическая постоянная времени | Ke | мс | 0.3 | 0.4 | ||||
| Сопротивление (межфазное при 25°С) | R25 | Ω | 4.2 | 8.4 | 6.3 | 7.3 | 14.5 | 10.9 |
| Индуктивность (межфазная) | L | мГн | 1.1 | 2.2 | 1.7 | 2.8 | 5.7 | 4.3 |
| Шаг полюсной пары | 2т | мм | 48 | 60 | ||||
| Коэффициент противоЭДС (межфазный) | Kv | Вср/(м/сек.) | 2.8 | 5.6 | 4.2 | 6.6 | 13.2 | 9.8 |
| Постоянная электродвигателя (при 25°С) | Km | Нм/√Вт | 2.3 | 3.2 | 2.8 | 4.0 | 5.8 | 4.9 |
| Термостойкость | Rth | °С/Вт | 5.36 | 2.68 | 3.57 | 3.57 | 1.80 | |
| Датчик температуры | - | PTC Термистор | ||||||
| Макс. пост. напряжение | - | В | 330 | |||||
| Макс. температура в обмотке | - | °С | 110 | |||||
| Минимальный радиус изгиба кабеля двигателя | - | мм | 46.5 | |||||
| Масса генератора усилий | Mf | кг | 0.12 | 0.19 | 0.15 | 0.2 | 0.34 | 0.26 |
| Единичная масса статора | Ms | кг/м | 0.9 | 1.4 | ||||
| Величина воздушного зазора | G | мм | 0.5 | 0.5 | ||||
| Длина генератора усилий | Lf | 64 | 112 | 88 | 80 | 140 | 110 | |
| Ширина генератора усилий | B | мм | 25 | 30 | ||||
| Внутренний диаметр генератора усилий | D1 | мм | 13 | 17 | ||||
| Диаметр статора | D | мм | 16±0.2 | |||||
| Длина хода | S | мм | 50~1050 | 100~1050 | ||||
Габаритные размеры цилиндрического линейного двигателя LMT2/LMT6

LMT2D |

LMT2Q |
 LMT2T |
 LMT6D |

LMT6Q |

LMT6T |
Технические характеристики линейного двигателя серий LMTA/LMTB
| Обозначение | Единица измерения | LMTA2 | LMTA3 | LMTA4 | LMTB2 | LMTB3 | LMTB4 | |
| Постоянная сила | Fc | Н | 27 | 42 | 55 | 48 | 72 | 96 |
| Постоянный ток | lc | Аср | 1.5 | 1.2 | ||||
| Пиковая сила для 1 сек. | Fp | H | 108 | 168 | 220 | 192 | 288 | 384 |
| Пиковый ток для 1 сек. | lp | Aср | 6 | 4.8 | ||||
| Постоянная силы | Kf | Н/Аср | 18 | 28 | 37 | 40 | 60 | 80 |
| Электрическая постоянная времени | Ke | мс | 0.6 | 0.9 | ||||
| R25 | Ω | 7.4 | 11.1 | 14.8 | 16 | 24 | 32.4 | |
| Индуктивность (межфазная) | L | мГн | 5 | 7.5 | 10 | 16.5 | 24.7 | 33 |
| Шаг полюсной пары | 2т | мм | 72 | 90 | ||||
| Коэффициент противоЭДС (межфазный) | Kv | Вср/(м/сек.) | 11.7 | 17.5 | 23.3 | 22 | 33 | 44 |
| Постоянная электродвигателя (при 25°С) | Km | Нм/√Вт | 5.4 | 6.9 | 7.8 | 8.2 | 10 | 11.5 |
| Термостойкость | Rth | °С/Вт | 2.40 | 1.60 | 1.20 | 1.73 | 1.16 | 0.86 |
| Датчик температуры | - | PTC Термистор | ||||||
| Макс. пост. напряжение | - | В | 330 | |||||
| Макс. температура в обмотке | - | °С | 100 | |||||
| Минимальный радиус изгиба кабеля двигателя | - | мм | 37.5 | |||||
| Масса генератора усилий | Mf | кг | 0.45 | 0.63 | 0.80 | 0.88 | 1.25 | 1.65 |
| Единичная масса статора | Ms | кг/м | 2 | 3.2 | ||||
| Величина воздушного зазора | G | мм | 0.75 | 0.75 | ||||
| Длина генератора усилий | Lf | мм | 94 | 130 | 166 | 120 | 165 | 210 |
| Ширина генератора усилий | B | мм | 40 | 50 | ||||
| Внутренний диаметр генератора усилий | D1 | мм | 21.5 | 26.5 | ||||
| Диаметр статора | D | мм | 20±0.2 | 25±0.2 | ||||
| Длина хода | S | мм | 100~1550 | 100~1550 | ||||
Габаритные размеры цилиндрического линейного двигателя LMTA/LMTB

LMTA2 |

LMTA3 |

LMTA4 |
 LMTB2 |

LMTB3 |

LMTB4 |
Технические характеристики линейного двигателя серий LMTC/LMTD
| Обозначение | Единица измерения | LMTC2 | LMTC3 | LMTC4 | LMTD2 | LMTD3 | LMTD4 | |
| Постоянная сила | Fc | Н | 92 | 138 | 55 | 48 | 72 | 96 |
| Постоянный ток | lc | Аср | 2.4 | 1.2 | ||||
| Пиковая сила для 1 сек. | Fp | H | 368 | 552 | 220 | 192 | 288 | 384 |
| Пиковый ток для 1 сек. | lp | Aср | 9.6 | 4.8 | ||||
| Постоянная силы | Kf | Н/Аср | 38 | 58 | 37 | 40 | 60 | 80 |
| Электрическая постоянная времени | Ke | мс | 1 | 0.9 | ||||
| Сопротивление (межфазное при 25°С) | R25 | Ω | 6.2 | 9.3 | 14.8 | 16 | 24 | 32.4 |
| Индуктивность (межфазная) | L | мГн | 7.2 | 10.8 | 10 | 16.5 | 24.7 | 33 |
| Шаг полюсной пары | 2т | мм | 120 | 90 | ||||
| Коэффициент противоЭДС (межфазный) | Kv | Вср/(м/сек.) | 24.6 | 36.9 | 23.3 | 22 | 33 | 44 |
| Постоянная электродвигателя (при 25°С) | Km | Нм/√Вт | 12.6 | 15.4 | 7.8 | 8.2 | 10 | 11.5 |
| Термостойкость | Rth | °С/Вт | 1.12 | 0.75 | 1.20 | 1.73 | 1.16 | 0.86 |
| Датчик температуры | - | PTC Термистор | ||||||
| Макс. пост. напряжение | - | В | 330 | |||||
| Макс. температура в обмотке | - | °С | 100 | |||||
| Минимальный радиус изгиба кабеля двигателя | - | мм | 37.5 | |||||
| Масса генератора усилий | Mf | кг | 1.49 | 2.1 | 0.80 | 0.88 | 1.25 | 1.65 |
| Единичная масса статора | Ms | кг/м | 6.4 | 3.2 | ||||
| Величина воздушного зазора | G | мм | 1 | 0.75 | ||||
| Длина генератора усилий | Lf | мм | 160 | 220 | 166 | 120 | 165 | 210 |
| Ширина генератора усилий | B | мм | 60 | 50 | ||||
| Внутренний диаметр генератора усилий | D1 | мм | 37 | 26.5 | ||||
| Диаметр статора | D | мм | 35±0.2 | 25±0.2 | ||||
| Длина хода | S | мм | 100~2000 | 100~1550 | ||||
Габаритные размеры цилиндрического линейного двигателя LMTC/LMTD

LMTC2 |

LMTC3 |

LMTC4 |
 LMTD2 |

LMTD3 |

LMTD4 |
*Руководство пользователя и CAD-файлы доступны по запросу.
Рекомендуемые товары:
www.zetek.ru
Линейный двигатель для робота: Усовершенствованная конструкция двигателя
На сегодняшний день наиболее распространенными в промышленности являются плоские линейные двигатели. Но они имеют недостатки, от которых, для того, чтобы использовать в малогабаритных моделях, необходимо избавиться.
Во-первых, это недопустимо большая масса, за счет использования большого количества магнитов. При этом, у плоских линейных двигателей с одним индуктором на сердечник постоянно воздействует сила притяжения со стороны магнитов, что плохо, так как увеличиваются затраты энергии на преодоление дополнительной силы трения:
Плоские линейные двигатели с двумя индукторам лишены этого недостатка, но они имеют в два раза больше постоянных магнитов, чем двигатели с одним индуктором, а это дополнительно увеличивает массу. Во-вторых, конструкция плоского линейного двигателя изначально геометрически неэффективна, потому что для совершения работы по перемещению задействована лишь половина магнитного потока. Таким образом, постоянные магниты, которые применяются во всех типах линейных двигателей, используются менее чем на 50%:От второго недостатка плоских линейных двигателей, а именно, их низкой эффективности, можно избавиться используя конструкцию цилиндрического линейного двигателя. Такой двигатель состоит из набора цилиндрических постоянных магнитов, которые перемещаются внутри блока катушек:
В такой конструкции магниты расположены по всей длине двигателя, а блок катушек покрывает небольшую его часть. Поскольку магниты имеют большую массу в сравнении с катушками, то я решил "перевернуть" конструкцию так, что катушки будут расположены по всей длине двигателя, а магнит потребуется только один, и займет он небольшую часть двигателя:

Для управления линейным двигателем я планирую использовать высокочастотный (сотни килогерц) импульсный ток с регулируемой шириной импульсов. Это должно уменьшить количество витков в катушках и сделать общую массу катушек не столь значительной. А так, как для такой конструкции требуется лишь один постоянный магнит, то масса такого двигателя должна быть небольшой.
Процедура управления таким цилиндрическим двигателем получилась немного отличной от описанной мной ранее для плоских линейных двигателей. Понятие цикла здесь отсутствует за ненадобностью, а такт означает поочередное включение катушек двигателя.
В первом такте, через катушку №3 проходит ток, превращая ее в электромагнит:
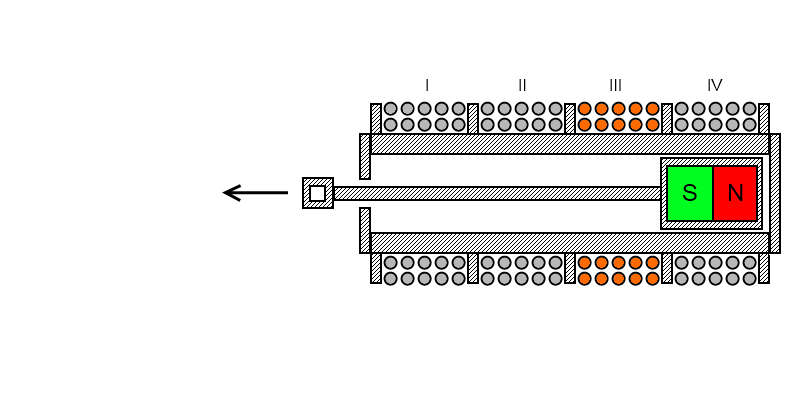
В следствии этого, постоянный магнит втягивается внутрь катушки №3. Во втором такте, ток проходит через катушку №2:
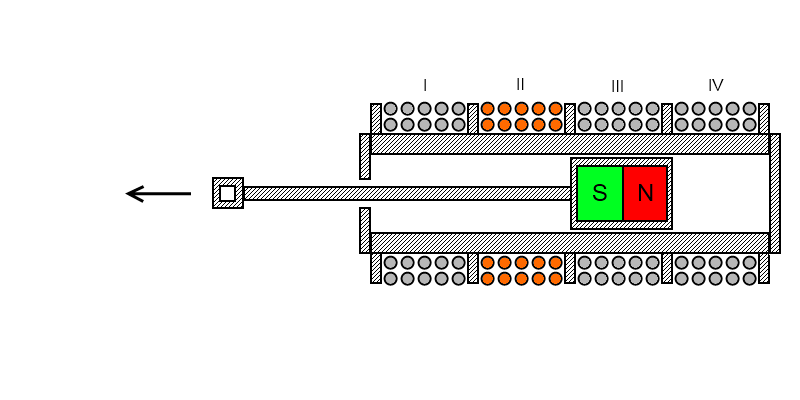
В следствии этого, магнит втягивается внутрь катушки №2. Во третьем такте, ток проходит через катушку №1:
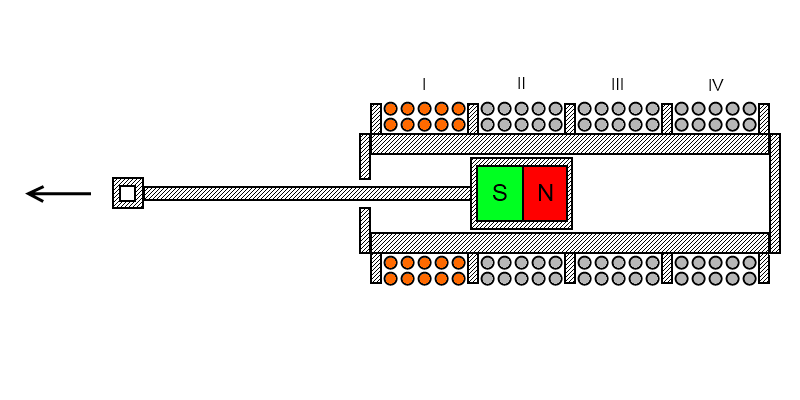 В следствии этого, магнит втягивается внутрь катушки №1. Катушка отключается, шток находится в покое.
В следствии этого, магнит втягивается внутрь катушки №1. Катушка отключается, шток находится в покое. Таким образом, усовершенствованная конструкция лишена (теоретически) обоих недостатков, а для управления двигателем достаточно лишь поочередного включения катушек.
vorph-a1.blogspot.com
Цилиндрический линейный асинхронный двигатель для привода погружных плунжерных насосов
Изобретение относится к электротехнике и может быть использовано в бесштанговых насосно-скважинных установках для добычи пластовых жидкостей со средних и больших глубин, преимущественно в нефтедобыче. Цилиндрический линейный асинхронный двигатель содержит цилиндрический индуктор с многофазной обмоткой, выполненной с возможностью осевого перемещения и смонтированной внутри стального вторичного элемента. Стальной вторичный элемент представляет собой корпус электродвигателя, внутренняя поверхность которого имеет высокопроводящее в виде слоя меди покрытие. Цилиндрический индуктор выполнен из нескольких модулей, выбранных из катушек фаз и соединенных между собой гибкой связью. Число модулей индуктора кратно числу фаз обмотки. При переходе от одного модуля к другому катушки фаз уложены с поочередной сменой местоположения отдельных фаз. При диаметре двигателя 117 мм, длине индуктора 1400 мм, частоте тока индуктора 16 Гц электродвигатель развивает усилие до 1000 Н и мощность 1,2 кВт при естественном охлаждении и до 1800 Н при масляном. Технический результат заключается в повышении тягового усилия и мощности на единицу длины двигателя в условиях ограничения по диаметру корпуса. 4 ил.
Изобретение относится к конструкциям погружных цилиндрических линейных асинхронных двигателей (ЦЛАД), используемых в бесштанговых насосно-скважинных установках для добычи пластовых жидкостей со средних и больших глубин, преимущественно в нефтедобыче.
Наиболее распространенным способом добычи нефти является подъем нефти из скважин с помощью штанговых плунжерных насосов, управляемых станками-качалками.
Кроме очевидных недостатков, присущим таким установкам (большие габариты и масса станков-качалок и штанг; износ насосно-компрессорных труб и штанг), существенным недостатком являются также малые возможности для регулирования скорости перемещения плунжера, а значит, и производительности штанговых насосных агрегатов, невозможность работы в наклонных скважинах.
Возможность регулировать эти характеристики позволила бы учитывать естественные изменения дебита скважины в процессе ее эксплуатации и сократить количество типоразмеров насосных агрегатов, используемых для различных скважин.
Известны технические решения по созданию бесштанговых глубинно-насосных установок. Одним из них является использование глубинных насосов плунжерного типа с приводом на основе линейных асинхронных двигателей.
Известна конструкция ЦЛАД, смонтированного в насосно-компрессорной трубе над плунжерным насосом (Ижеля Г.И. и др. «Линейные асинхронные двигатели», Киев, Техника, 1975 г., стр.135) /1/. Известный двигатель имеет корпус, помещенный в него неподвижный индуктор и подвижный вторичный элемент, расположенный внутри индуктора и воздействующий через тягу на плунжер насоса.
Тяговое усилие на подвижном вторичном элементе появляется вследствие взаимодействия наведенных в нем токов с бегущим магнитным полем линейного индуктора, создаваемым многофазными обмотками, соединенными с источником питания.
Такой электродвигатель использован в бесштанговых насосных агрегатах (а.с. СССР №491793, публ. 1975 г.) /2/ и (а.с. СССР №538153, публ. 1976 г.) /3/.
Однако условия эксплуатации погружных плунжерных насосов и линейных асинхронных двигателей в скважине накладывают ограничения на выбор конструкции и размеров электродвигателей. Отличительной особенностью погружных ЦЛАД является ограниченность диаметра двигателя, в частности не превышающего диаметра насосно-компрессорной трубы.
Для таких условий известные электродвигатели имеют относительно низкие технико-экономические показатели:
- к.п.д. и cosϕ уступают аналогичным показателям асинхронных двигателей традиционного исполнения;
- развиваемые ЦЛАД удельные механическая мощность и тяговое усилие (на единицу длины двигателя) относительно малы. Длина двигателя, размещенного в скважине, ограничена длиной насосно-компрессорной трубы (не более 10-12 м). При ограничении длины двигателя трудно достичь требуемого для подъема жидкости давления. Некоторое повышение тягового усилия и мощности возможно только за счет увеличения электромагнитных нагрузок двигателя, что ведет к снижению к.п.д. и уровня надежности двигателей из-за повышенных тепловых нагрузок.
Эти недостатки можно устранить, если выполнить «обращенную» схему «индуктор-вторичный элемент», иными словами индуктор с обмотками разместить внутри вторичного элемента.
Такое исполнение линейного двигателя известно («Индукционные электродвигатели с разомкнутым магнитопроводом». Информэлектро, М., 1974 г., стр.16-17) /4/ и может быть принято в качестве наиболее близкого к заявляемому решению.
Известный линейный двигатель содержит цилиндрический индуктор с обмоткой, смонтированный внутри вторичного элемента, внутренняя поверхность которого имеет высокопроводящее покрытие.
Такое исполнение индуктора по отношению к вторичному элементу было создано для облегчения намотки и монтажа катушек и применялось не в качестве привода для погружных насосов, работающих в скважинах, а для наземного использования, т.е. без жесткого ограничения по габаритам корпуса двигателя.
Задача настоящего изобретения состоит в разработке конструкции цилиндрического линейного асинхронного двигателя для привода погружных плунжерных насосов, который в условиях ограничения по диаметру корпуса двигателя обладает повышенными удельными показателями: тяговым усилием и мощностью на единицу длины двигателя при обеспечении необходимого уровня надежности и заданном энергопотреблении.
Для решения поставленной задачи цилиндрический линейный асинхронный двигатель для привода погружных плунжерных насосов содержит цилиндрический индуктор с обмоткой, смонтированный внутри вторичного элемента, внутренняя поверхность которого имеет высокопроводящее покрытие, при этом индуктор с обмотками выполнен с возможностью осевого перемещения и смонтирован внутри трубчатого корпуса электродвигателя, толщина стальной стенки которого не менее 6 мм, а внутренняя поверхность корпуса покрыта слоем меди толщиной не менее 0,5 мм.
Учитывая неровность поверхности скважин и, как следствие, возможный изгиб корпуса электродвигателя, индуктор электродвигателя следует выполнять состоящим из нескольких модулей, соединенных между собой гибкой связью.
При этом для выравнивания токов по фазам обмотки двигателя число модулей выбрано кратным числу фаз, а при переходе от одного модуля к другому катушки уложены с поочередной сменой местоположения отдельных фаз.
Сущность изобретения заключается в следующем.
Использование стального корпуса электродвигателя в качестве вторичного элемента позволяет максимально эффективно распорядиться ограниченным пространством скважины. Предельно достижимые значения мощности и усилия двигателя зависят от предельно допустимых электромагнитных нагрузок (плотность тока, индукция магнитного поля) и объема активных элементов (магнитопровод, обмотка, вторичный элемент). Совмещение конструктивного элемента конструкции - корпуса электродвигателя с активным вторичным элементом позволяет увеличить объем активных материалов двигателя.
Увеличение активной поверхности двигателя позволяет повысить тяговое усилие и мощность двигателя на единицу его длины.
Увеличение активного объема двигателя позволяет снизить электромагнитные нагрузки, определяющие тепловое состояние двигателя, от которого зависит уровень надежности.
При этом получение необходимых значений тягового усилия и мощности двигателя на единицу его длины при обеспечении необходимого уровня надежности и заданном энергопотреблении (к.п.д. и cosϕ) в условиях ограничения по диаметру корпуса двигателя достигается оптимальным подбором толщины стальной стенки корпуса двигателя, а также толщины высокопроводящего покрытия его активной зоны - внутренней поверхности корпуса.
Учитывая номинальную скорость перемещения рабочих частей плунжерного насоса, оптимально соответствующую ей скорость бегущего магнитного поля подвижного индуктора, возможные технологические трудности при изготовлении обмоток, приемлемые значения полюсного деления (не менее 0,06-0,10 м) и частоты тока индуктора (не более 20 Гц), параметры по толщине стальной стенки вторичного элемента и медного покрытия выбраны заявленным образом. Эти параметры позволяют в условиях ограничения по диаметру двигателя снизить потери мощности (и, следовательно, повысить к.п.д.) за счет исключения роста тока намагничивания и снижения рассеяния магнитного потока.
Новый технический результат, достигаемый изобретением, заключается в применении обращенной схемы «индуктор-вторичный элемент» для максимально эффективного использования ограниченного пространства скважины при создании цилиндрического линейного асинхронного двигателя с характеристиками, позволяющими использовать его в качестве привода погружных насосов.
Заявленный двигатель иллюстрируется чертежами, где на фиг.1 изображен общий вид двигателя с модульным исполнением индуктора, на фиг.2 - то же, разрез по А-А, на фиг.3 изображен отдельный модуль, на фиг.4 - то же, разрез по Б-Б.
Двигатель содержит корпус 1 - стальную трубу диаметром 117 мм, с толщиной стенки 6 мм. Внутренняя поверхность 2 трубы покрыта медью слоем 0,5 мм. Внутри стальной трубы 1 с помощью центрирующих втулок 3 с антифрикционными прокладками 4 и трубы 5 смонтирован подвижный индуктор, состоящий из модулей 6, соединенных между собой гибкой связью.
Каждый из модулей индуктора (фиг.3) набран из отдельных катушек 7, чередующихся с кольцевыми зубцами 8, имеющими радиальную прорезь 9, и размещенных на магнитопроводе 10.
Гибкая связь состоит из верхнего 11 и нижнего 12 хомутов, подвижно установленных с помощью пазов на выступах соседних центрирующих втулок.
На верхней плоскости хомута 11 закреплены токоподводящие кабели 13. При этом для выравнивания токов в фазах индуктора число модулей выбрано кратным числу фаз, а при переходе от одного модуля к другому катушки отдельных фаз поочередно меняются местами. Общее количество модулей индуктора, а значит, и длина двигателя выбираются в зависимости от требуемого тягового усилия.
Электродвигатель может быть оснащен штоком 14 для присоединения его к погружному плунжерному насосу и штоком 15 - для подсоединения к токоподводу. При этом штоки 14 и 15 соединены с индуктором гибкой связью 16 для предотвращения передачи изгибающего момента от погружного насоса и токоподвода на индуктор.
Электродвигатель прошел стендовые испытания и работает следующим образом. При подаче на погружной электродвигатель питания от преобразователя частоты, расположенного на поверхности земли, в многофазной обмотке двигателя появляются токи, создающие бегущее магнитное поле. Это магнитное поле наводит вторичные токи как в высокопроводящем (медном) слое вторичного элемента, так и в стальном корпусе двигателя.
Взаимодействие этих токов с магнитным полем приводит к созданию тягового усилия, под действием которого перемещается подвижный индуктор, воздействующий через тягу на плунжер насоса. В конце хода подвижной части по команде датчиков происходит реверсирование двигателя за счет изменения чередования фаз питающего напряжения. Далее цикл повторяется.
При диаметре двигателя 117 мм, длине индуктора 1400 мм, частоте тока индуктора 16 Гц электродвигатель развивает усилие до 1000 Н и мощность 1,2 кВт при естественном охлаждении и до 1800 Н при масляном.
Таким образом, заявленный двигатель имеет приемлемые технико-экономические характеристики для его использования в комплекте с погружным плунжерным насосом для добычи пластовых жидкостей со средних и больших глубин.
Цилиндрический линейный асинхронный двигатель для привода погружных плунжерных насосов, содержащий цилиндрический индуктор с многофазной обмоткой, выполненный с возможностью осевого перемещения и смонтированный внутри стального вторичного элемента, стальной вторичный элемент представляет собой корпус электродвигателя, внутренняя поверхность которого имеет высокопроводящее в виде слоя меди покрытие, отличающийся тем, что цилиндрический индуктор выполнен из нескольких модулей, набранных из катушек фаз и соединенных между собой гибкой связью, число модулей цилиндрического индуктора кратно числу фаз обмотки, а при переходе от одного модуля к другому катушки фаз уложены с поочередной сменой местоположения отдельных фаз.
www.findpatent.ru
цилиндрический линейный асинхронный двигатель для привода погружных плунжерных насосов - патент РФ 2266607
Изобретение относится к электротехнике и может быть использовано в бесштанговых насосно-скважинных установках для добычи пластовых жидкостей со средних и больших глубин, преимущественно в нефтедобыче. Цилиндрический линейный асинхронный двигатель содержит цилиндрический индуктор с многофазной обмоткой, выполненной с возможностью осевого перемещения и смонтированной внутри стального вторичного элемента. Стальной вторичный элемент представляет собой корпус электродвигателя, внутренняя поверхность которого имеет высокопроводящее в виде слоя меди покрытие. Цилиндрический индуктор выполнен из нескольких модулей, выбранных из катушек фаз и соединенных между собой гибкой связью. Число модулей индуктора кратно числу фаз обмотки. При переходе от одного модуля к другому катушки фаз уложены с поочередной сменой местоположения отдельных фаз. При диаметре двигателя 117 мм, длине индуктора 1400 мм, частоте тока индуктора 16 Гц электродвигатель развивает усилие до 1000 Н и мощность 1,2 кВт при естественном охлаждении и до 1800 Н при масляном. Технический результат заключается в повышении тягового усилия и мощности на единицу длины двигателя в условиях ограничения по диаметру корпуса. 4 ил. 
Рисунки к патенту РФ 2266607
Изобретение относится к конструкциям погружных цилиндрических линейных асинхронных двигателей (ЦЛАД), используемых в бесштанговых насосно-скважинных установках для добычи пластовых жидкостей со средних и больших глубин, преимущественно в нефтедобыче.
Наиболее распространенным способом добычи нефти является подъем нефти из скважин с помощью штанговых плунжерных насосов, управляемых станками-качалками.
Кроме очевидных недостатков, присущим таким установкам (большие габариты и масса станков-качалок и штанг; износ насосно-компрессорных труб и штанг), существенным недостатком являются также малые возможности для регулирования скорости перемещения плунжера, а значит, и производительности штанговых насосных агрегатов, невозможность работы в наклонных скважинах.
Возможность регулировать эти характеристики позволила бы учитывать естественные изменения дебита скважины в процессе ее эксплуатации и сократить количество типоразмеров насосных агрегатов, используемых для различных скважин.
Известны технические решения по созданию бесштанговых глубинно-насосных установок. Одним из них является использование глубинных насосов плунжерного типа с приводом на основе линейных асинхронных двигателей.
Известна конструкция ЦЛАД, смонтированного в насосно-компрессорной трубе над плунжерным насосом (Ижеля Г.И. и др. «Линейные асинхронные двигатели», Киев, Техника, 1975 г., стр.135) /1/. Известный двигатель имеет корпус, помещенный в него неподвижный индуктор и подвижный вторичный элемент, расположенный внутри индуктора и воздействующий через тягу на плунжер насоса.
Тяговое усилие на подвижном вторичном элементе появляется вследствие взаимодействия наведенных в нем токов с бегущим магнитным полем линейного индуктора, создаваемым многофазными обмотками, соединенными с источником питания.
Такой электродвигатель использован в бесштанговых насосных агрегатах (а.с. СССР №491793, публ. 1975 г.) /2/ и (а.с. СССР №538153, публ. 1976 г.) /3/.
Однако условия эксплуатации погружных плунжерных насосов и линейных асинхронных двигателей в скважине накладывают ограничения на выбор конструкции и размеров электродвигателей. Отличительной особенностью погружных ЦЛАД является ограниченность диаметра двигателя, в частности не превышающего диаметра насосно-компрессорной трубы.
Для таких условий известные электродвигатели имеют относительно низкие технико-экономические показатели:
- к.п.д. и cos уступают аналогичным показателям асинхронных двигателей традиционного исполнения;
уступают аналогичным показателям асинхронных двигателей традиционного исполнения;
- развиваемые ЦЛАД удельные механическая мощность и тяговое усилие (на единицу длины двигателя) относительно малы. Длина двигателя, размещенного в скважине, ограничена длиной насосно-компрессорной трубы (не более 10-12 м). При ограничении длины двигателя трудно достичь требуемого для подъема жидкости давления. Некоторое повышение тягового усилия и мощности возможно только за счет увеличения электромагнитных нагрузок двигателя, что ведет к снижению к.п.д. и уровня надежности двигателей из-за повышенных тепловых нагрузок.
Эти недостатки можно устранить, если выполнить «обращенную» схему «индуктор-вторичный элемент», иными словами индуктор с обмотками разместить внутри вторичного элемента.
Такое исполнение линейного двигателя известно («Индукционные электродвигатели с разомкнутым магнитопроводом». Информэлектро, М., 1974 г., стр.16-17) /4/ и может быть принято в качестве наиболее близкого к заявляемому решению.
Известный линейный двигатель содержит цилиндрический индуктор с обмоткой, смонтированный внутри вторичного элемента, внутренняя поверхность которого имеет высокопроводящее покрытие.
Такое исполнение индуктора по отношению к вторичному элементу было создано для облегчения намотки и монтажа катушек и применялось не в качестве привода для погружных насосов, работающих в скважинах, а для наземного использования, т.е. без жесткого ограничения по габаритам корпуса двигателя.
Задача настоящего изобретения состоит в разработке конструкции цилиндрического линейного асинхронного двигателя для привода погружных плунжерных насосов, который в условиях ограничения по диаметру корпуса двигателя обладает повышенными удельными показателями: тяговым усилием и мощностью на единицу длины двигателя при обеспечении необходимого уровня надежности и заданном энергопотреблении.
Для решения поставленной задачи цилиндрический линейный асинхронный двигатель для привода погружных плунжерных насосов содержит цилиндрический индуктор с обмоткой, смонтированный внутри вторичного элемента, внутренняя поверхность которого имеет высокопроводящее покрытие, при этом индуктор с обмотками выполнен с возможностью осевого перемещения и смонтирован внутри трубчатого корпуса электродвигателя, толщина стальной стенки которого не менее 6 мм, а внутренняя поверхность корпуса покрыта слоем меди толщиной не менее 0,5 мм.
Учитывая неровность поверхности скважин и, как следствие, возможный изгиб корпуса электродвигателя, индуктор электродвигателя следует выполнять состоящим из нескольких модулей, соединенных между собой гибкой связью.
При этом для выравнивания токов по фазам обмотки двигателя число модулей выбрано кратным числу фаз, а при переходе от одного модуля к другому катушки уложены с поочередной сменой местоположения отдельных фаз.
Сущность изобретения заключается в следующем.
Использование стального корпуса электродвигателя в качестве вторичного элемента позволяет максимально эффективно распорядиться ограниченным пространством скважины. Предельно достижимые значения мощности и усилия двигателя зависят от предельно допустимых электромагнитных нагрузок (плотность тока, индукция магнитного поля) и объема активных элементов (магнитопровод, обмотка, вторичный элемент). Совмещение конструктивного элемента конструкции - корпуса электродвигателя с активным вторичным элементом позволяет увеличить объем активных материалов двигателя.
Увеличение активной поверхности двигателя позволяет повысить тяговое усилие и мощность двигателя на единицу его длины.
Увеличение активного объема двигателя позволяет снизить электромагнитные нагрузки, определяющие тепловое состояние двигателя, от которого зависит уровень надежности.
При этом получение необходимых значений тягового усилия и мощности двигателя на единицу его длины при обеспечении необходимого уровня надежности и заданном энергопотреблении (к.п.д. и cos) в условиях ограничения по диаметру корпуса двигателя достигается оптимальным подбором толщины стальной стенки корпуса двигателя, а также толщины высокопроводящего покрытия его активной зоны - внутренней поверхности корпуса.
Учитывая номинальную скорость перемещения рабочих частей плунжерного насоса, оптимально соответствующую ей скорость бегущего магнитного поля подвижного индуктора, возможные технологические трудности при изготовлении обмоток, приемлемые значения полюсного деления (не менее 0,06-0,10 м) и частоты тока индуктора (не более 20 Гц), параметры по толщине стальной стенки вторичного элемента и медного покрытия выбраны заявленным образом. Эти параметры позволяют в условиях ограничения по диаметру двигателя снизить потери мощности (и, следовательно, повысить к.п.д.) за счет исключения роста тока намагничивания и снижения рассеяния магнитного потока.
Новый технический результат, достигаемый изобретением, заключается в применении обращенной схемы «индуктор-вторичный элемент» для максимально эффективного использования ограниченного пространства скважины при создании цилиндрического линейного асинхронного двигателя с характеристиками, позволяющими использовать его в качестве привода погружных насосов.
Заявленный двигатель иллюстрируется чертежами, где на фиг.1 изображен общий вид двигателя с модульным исполнением индуктора, на фиг.2 - то же, разрез по А-А, на фиг.3 изображен отдельный модуль, на фиг.4 - то же, разрез по Б-Б.
Двигатель содержит корпус 1 - стальную трубу диаметром 117 мм, с толщиной стенки 6 мм. Внутренняя поверхность 2 трубы покрыта медью слоем 0,5 мм. Внутри стальной трубы 1 с помощью центрирующих втулок 3 с антифрикционными прокладками 4 и трубы 5 смонтирован подвижный индуктор, состоящий из модулей 6, соединенных между собой гибкой связью.
Каждый из модулей индуктора (фиг.3) набран из отдельных катушек 7, чередующихся с кольцевыми зубцами 8, имеющими радиальную прорезь 9, и размещенных на магнитопроводе 10.
Гибкая связь состоит из верхнего 11 и нижнего 12 хомутов, подвижно установленных с помощью пазов на выступах соседних центрирующих втулок.
На верхней плоскости хомута 11 закреплены токоподводящие кабели 13. При этом для выравнивания токов в фазах индуктора число модулей выбрано кратным числу фаз, а при переходе от одного модуля к другому катушки отдельных фаз поочередно меняются местами. Общее количество модулей индуктора, а значит, и длина двигателя выбираются в зависимости от требуемого тягового усилия.
Электродвигатель может быть оснащен штоком 14 для присоединения его к погружному плунжерному насосу и штоком 15 - для подсоединения к токоподводу. При этом штоки 14 и 15 соединены с индуктором гибкой связью 16 для предотвращения передачи изгибающего момента от погружного насоса и токоподвода на индуктор.
Электродвигатель прошел стендовые испытания и работает следующим образом. При подаче на погружной электродвигатель питания от преобразователя частоты, расположенного на поверхности земли, в многофазной обмотке двигателя появляются токи, создающие бегущее магнитное поле. Это магнитное поле наводит вторичные токи как в высокопроводящем (медном) слое вторичного элемента, так и в стальном корпусе двигателя.
Взаимодействие этих токов с магнитным полем приводит к созданию тягового усилия, под действием которого перемещается подвижный индуктор, воздействующий через тягу на плунжер насоса. В конце хода подвижной части по команде датчиков происходит реверсирование двигателя за счет изменения чередования фаз питающего напряжения. Далее цикл повторяется.
При диаметре двигателя 117 мм, длине индуктора 1400 мм, частоте тока индуктора 16 Гц электродвигатель развивает усилие до 1000 Н и мощность 1,2 кВт при естественном охлаждении и до 1800 Н при масляном.
Таким образом, заявленный двигатель имеет приемлемые технико-экономические характеристики для его использования в комплекте с погружным плунжерным насосом для добычи пластовых жидкостей со средних и больших глубин.
ФОРМУЛА ИЗОБРЕТЕНИЯ
Цилиндрический линейный асинхронный двигатель для привода погружных плунжерных насосов, содержащий цилиндрический индуктор с многофазной обмоткой, выполненный с возможностью осевого перемещения и смонтированный внутри стального вторичного элемента, стальной вторичный элемент представляет собой корпус электродвигателя, внутренняя поверхность которого имеет высокопроводящее в виде слоя меди покрытие, отличающийся тем, что цилиндрический индуктор выполнен из нескольких модулей, набранных из катушек фаз и соединенных между собой гибкой связью, число модулей цилиндрического индуктора кратно числу фаз обмотки, а при переходе от одного модуля к другому катушки фаз уложены с поочередной сменой местоположения отдельных фаз.
www.freepatent.ru
Цилиндрический линейный двигатель
ОПИСАНИЕ
ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
Союз Советскик
Социалистических
Республик
785931 (61) Дополнительное к авт. сеид-ву— (22) Заявлено17 ° 04. 78 (21) 2610062/24-11 с присоединением заявки Йо —(23) Приоритет-Опубликоваио 071280. Бюллетень ЙЯ 45 (51)М. Кл.
Н 02 К 41/02
Государственный комитет
СССР по делам изобретений н открытий (53) УДК 621. 313.3 (088.8) Дата опубликования описания 10. 1280 (72) Автор изобретения
ФеК.Лежнин (71) Заявитель (54) ЦИЛИНДРИЧЕСКИЙ ЛИНЕЙНЫЯ ДВИГАТЕЛЬ
Изобретение относится к электрооборудованию, а именно к цилиндрическим линейным двигателям, и мо>хет быть использовано в системах электромагнитной транспортировки тел в контейнерах (документов, книг, технологических проб, инструмента), в метрологии (например, для создания ударов при проверке измерителей импульса силы) и в различных ударных механиз- 10 мах.
Известен цилиндрический линейный двигатель, содержащий первичную систему в виде индуктора, набраннбго из чередующихся по длине кольцевых кату- 15 шек и зубцов и вторичную систему в виде бегуна 11 .
Внешняя оболочка индуктора, являющаяся спинкой магнитопровода, выполнена в виде нескольких витков из тран-20 сформаторной стали. Вторичная система ЦЛД контейнер) выполнена в виде алюминиевого цилиндра с ферромагнитным вкладышем.
Потребляя сравнительно большую 25 мощность, известный двигатель позволяет перемещать контейнер лишь на несколько десятков метров.
КПД двигателя весьма низок, так как велик немагнитный зазор между 30 первичной и вторичной системами (большая величина этого зазора обусловлена использованием трубы, являющейся основным элементом жесткости индуктора), весьма значительны и трудозатраты на иэготовление индуктора и несущей (элемент >хесткости) трубы. Эта труба должна быть тонкостенной (с толщиной стенки около одного миллиметра) и иметь продольные пазы.
Цель изобретения — повышение производительности двигателя.
Достигается это тем, что катушки с зубцами скреплены продольными стержнями, расположенными на внутренне . стороне, а в корпусе бегуна выполнены продольные пазы, в которых размещены опоры качения, взаимодействующие со стер>хнями.
На .фиг. 1 показан продольный разрез цилиндрического линейного двигателя: на фиг ° 2 — вид A фиг.1.
Цилиндрический линейный двигатель содержит индуктор, включающий кольцевые катушки 1, промежуточные зубцы
2, продольные стержни 3, винты 4, спинку 5 и каркас, состоящий из фланцев 6 и стержней 7, привернутых к фланцам 6 винтами 8. Бегун 9 имеет
785931 пазы 10, в которых закреплены опоры качения (колеса 11), взаимодействующие со стержнями 3. 1
Работа цилиндрического линейного двигателя заключается в следующем.
При подаче напряжения на катушки 1 (на фиг. 1 и 2 клеммник и выводы катушек не показаны) возникает бегущее магнитное поле. Это поле создает токи в корпусе бегуна 9 (корпус бегуна выполнен из металла, имеющего высокую злектропроводимость). В результате взаимодействия бегущего магйитного поля с полем, образованным токами вторичной системы, возни- f5 кает сила, под действием которой ускоряется бегун 9. Бегун 9 .в индукторе перемещается по направляющим, функции которых при перемещении бегуна 9 в индукторе выполняют стержни 3. Пос- Щ ле выхода из индуктора бегун 9 катится по состыкованным со стержнями
3 направля:ощим трассы до следующего индуктора (направляющие трассы на фиг. 1 и 2 не показаны), затем снова ускоряется и т.д.
Сжатие катушек и зубцов индуктора (при сборке) осуществляется винтами
4. При этом сжимаются и прокладки, прилегающие к фланцам каркаса (прокладки на фиг. 1 и 2 не показаны).
B предлагаемом двигателе по сравнению с прототипом на один-два порядка меньше немагнитный зазор между индуктором (а точнее, зубцами индуктора) и вторичной системой: он составляет десятые и даже сотые доли миллиметра, уменьшено трение вторичной системы о индуктор и направляющиеfòðåíèå качения . Уменьшение зазора и трения обуславливает более высокий КПД предлагаемого двигателя.
Следует отметить, что предложенный цилиндрический линейный двигатель не имеет ни одной детали (узла)
У изготовление которых вызвало бы ощутимые технологические затруднения.
"формула изобретения
Цилиндрическии линейный двигатель, содержащий первичную систему в виде индуктора, набранного из чередующихся по длине кольцевых Kàòóøå
Источники информации, принятые во внимание при экспертизе
1.Микельсон А.Э. и X
Электромагнитная транспортировка тел, Рига, "Зинатне", 1971, с. 82, рис ° 47 (прототип).
785931
Составитель Р.Киселева
Редактор Г.Бельская Техред Е.Гаврилешко Корректор В.Бутяга
Заказ 8858 56 Тираж 783 Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д.4/5
Филиал ПППП"Патент", г.ужгород,ул.Проектная,4



www.findpatent.ru
Линейный цилиндрический асинхронный двигатель
Использование: в системах автоматического регулирования. Сущность изобретения: индуктор двигателя состоит из дисковых катушек, по одной в каждом пазу, отделенных друг от друга дисковыми магнитопроводами. Обмотка возбуждения занимает половину каждого полюсного деления индуктора. На второй половине чередуются обе обмотки управления OVi и ОУ2 таким образом, чтобы машина сохраняла пространственную симметрию. Таким образом осуществляется сложение или вычитание двух управляющих сигналов без использования специального суммирующего устройства . 2 з.п. ф-лы, 6 ил.
союз советских соци листичЕских
РЕСПУБЛИК (si)s Н 02 К 41/025
ГОСУДАРСТВЕННОЕ ПАТЕНТНОЕ
ВЕДОМСТВО СССР (ГОСПАТЕНТ СССР) ОПИСАНИЕ ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ (21) 4794772/07 (22) 23.02.90 (46) 15.04.93. Бюл. N 14 (71) Донецкий политехнический институт (72) М,З.Дудник (SU), Саид Мзе (MG) и
Е.Г.Смолюк (SU) (56) "Вопросы теории и проектирования электрических машин". Оптимизация параметров и характеристик". Межвузовский научный сборник. Издательство Саратовского университета, 1986, с. 3 — 8.
Журнал "Электротехника", hb 3, 1980, с.
14-17. (54) Л И Н Е Й Н Ы Й ЦИ Л И Н Д Р И Ч E С КтИ Й
АСИНХРОННЫЙ ДВИГАТЕЛЬ
Изобретение относится к электротехнике, в частности к линейным электрически приводам, и предназначено для использования в системах автоматического регулирования.
Целью изобретения является повышение надежности и расширение функциональных возможностей управляемого цилиндрического линейного аСинхронного двигателя.
Предлагаемый электродвигатель изображается чертежами, где на фиг. 1 показана конструкция двигателя; на фиг. 2 приведен возможный вариант исполнения катушки управления, на фиг;3 показано расположение обмоток в пределах одного полюсного деления в зависимости от числа пар полюсов в случае размещения обмоток управления в разных пазах и при общем . количестве пазов Z = 24; на фиг. 4 — схема соединения обмоток электродвигателя в
„„5U 1809508 А1 (57) Использование: в системах автоматического регулирования. Сущность изобретения: индуктор двигателя состоит из дисковых катушек, по одной в каждом пазу, отделенных друг от друга дисковыми магнитопроводами. Обмотка возбуждения занимает половину каждого полюсного деления индуктора. На второй половине чередуются обе обмотки управления ОУ и ОУг таким образом, чтобы машина сохраняла пространственную симметрию. Таким образом осуществляется сложение или вычитание двух управляющих сигналов без использования специального суммирующего устройства. 2 з.п. ф-лы, 6 ил. случае 2 = 24 и числа пар полюсов р = 3, при размещении обмоток управления в разных пазах; на фиг. 5 приведены структурные схемы автоматизированных электроприводов с использованием управляемых ЦЛАД, на фиг, 6 показана схема размещения обмоток управления в общих пазах.
Предлагаемый электродвигатель имеет QQ два варианта исполнения. В первом вариан- С) те его цилиндрический индуктор 1 состоит из дисковых катушек 4 по одной в каждом Qq пазу, отделенных друг от друга дисковыми шиктованными магнитопроводами 3, имеющими боковые соединения б, выполненные из пластин стали (фиг. 1, вид по А-А), Обмотка возбуждения занимает половину каждого полюсного деления r индуктора. На второй половине чередуются обе обмотки управления ОУ и ОУ2 таким образом, чтобы машина сохраняла пространственную симметрию.
Однако, как видно из фиг. 3, такое исполне1809508
20
30
40
55 ние может быть осуществлено только для определенного числа пазов, приходящихся на полюсноеделение, посколькудля остальных симметрия нарушается. Однако достоинствами данного варианта являются простота конструкции и возможность его получения иэ обыкновенного линейного двигателя без особого конструктивного изменения (фиг. 4).
Для устранения вышеуказанного недостатка предлагается второй вариант, в котором обмотки управления выполнены в виде двух изолированных друг от друга спиральных катушек, расположенных в общих пазах (фиг. 2). В данном случае выбор длины полюсного деления при заданном числе является более широким.
Пространственная симметрия размещения обмоток управления 1 и 2 в пределах половины полюсного деления х по первому варианту достигается лишь в случае если число пазов четное.
Во втором варианте такое условие не требуется, так как каждый паэ содержит две изолированные друг от друга спиральные катушки, одна из которых относится к первой ОУ1, а другая ко второй АУ2. Для выравнивания сопротивления обмоток ОУ1 и ОУ2 (при одинаковом сечении проводников) предлагается осуществлять их электрическое соединение так, как изображено на фиг. 6, т.е. в одном пазу наружный слой спирали относится к обмотке управления
ОУ1, а в следующем пазу наоборот к этой обмотке принадлежит внутренний слой и т.д.
В обоих вариантах вторичный элемент
2 представляет собой стальную трубу с медным покрытием или без него, Работа двигателя предлагаемой конструкции заключается в следующем.
Сигналы, поступающие в обмотки управления, создают пульсирующие магнитные полл. Последние, взаимодействуя с полем обмотки возбуждения, создают два бегущие поля с соответствующими амплитудами и направляем перемещения. Во вторичном элементе эти поля наводят ЭДС и вторичные токи. В результате взаимодействия бегущих полей индуктора с токами, наведенными во вторичном элементе, образуются электромагнитные усилия, результирующее которых направлено в сторону перемещения поля с наибольшей амплитудой, если направления перемещения полей противоположны. В случае, когда направления движения бегущих полей совпадают, усилия действуют согласно. Таким образом, предлагаемый двигвтвль позволяет непосредственно осуществить сложение или вычитание двух сигналов без использования специального суммирующего устройства, в результате чего образуется тяговое усилие для перемещения рабочего органа в требуемом направлении.
Для данного двигателя характерны три режима работы, причем во всех этих режимах обмотка возбуждения включена посто-. янно.
Первый режим — отсутствуют сигналы на обеих обмотках управления, в машине существует лишь пульсирующее поле возбуждения, поэтому вторичная часть находится в неподвижном состоянии, Второй режим — напряжение управления подается к одной обмотке управления, т.е. двигатель работает как обыкновенный двухфазный управляемый асинхронный двигатель. Это означает, что поскольку проводники каждой фазы размещены в пределах половины полюсного деления и токи в них сдвинуты по фазе, TO в воздушном зазоре машины образуется бегущее магнитное поле, картина которого изменяется в зависимости от амплитуды и фазы сигнала управления, что в свою очередь вызывает изменение характеристик двигателя. Тем самым достигается его управление, Третий режим — наличие сигнала на обеих обмотках управления. В этом случае работа двигателя (направление движения, пусковое усилие, скорость) будет зависеть от соотношения и знаков сигналов. .Предложенный электродвигатель прост по конструкции, не имеет принципиальных ограничений по мощности и обладает хорошей управляемостью. Благодаря этому его можно применять в автоматизированных электроприводах с возвратно-поступательным движением органов.
Формула изобретения
1. Линейный цилиндрический асинхронный двигатель, содер>кащий индуктор с обмоткой управления в виде дисковых катушек, соединенных по двухфазной схеме со сдвигом на половину погносного деления, и концентричный им вторичный элемент, отли ю щи и ся тем, что, с целью повышения надежности и расширения эксплуатационных возможностей, он снабжен дополнительной обмоткой управления, витки чередуются с витками первой обмотки управления.
2. Двигатель по и. 1, отличающийся тем, что на одной половине каждого полюсного деления индуктора размещена обмотка возбуждения, а на второй полови е размещены обе обмотки управлени"., причем вторая обмотка управления выполнена в виде дисковых катушек, чередующихся с
1809508
ОЯ
ОЯ»
ОУ2
/ е ов оы г ов о
P=4 дисковыми катушками первой обмотки управления, при этом число зов, занятых обеими обмотками управления, равно числу пазов, занятых обмоткой возбуждения.
3, Двигательпо п.1, отлича ю щи йс я тем, что обе обмотки управления размещены в общих пазах в виде двухслойных изолированных спиральных катушек.
Фиа G
Составитель M.Äóäíèê
Техред M.Mîðãå Hòàë Корректор М,y ä.
Редактор Т.Иванова
Заказ 1290 Тираж Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР
113035, Москва, Ж-ЗБ, Раушская наб., 4/5 .
Производственно-издательский комбинат "Патент", r. Ужгород, ул.Гагарина, 191




www.findpatent.ru
Цилиндрический линейный асинхронный двигатель
1. ЦИЛИНДРИЧЕСКИЙ ЛИНЕЙНЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ, содержащий якорь и индуктор с отдельными продольными магнитопроводами и многофазной сосредоточенной обмоткой, отличающийся тем, что, с целью обеспечения низкой синхронной скорости и уменьшения габаритов двигателя, на каждом магнитопроводе расположены катушки одной фазы, а сам магнитопровод сдвинут в осевом направлс нии относительно соседнего магнитопровода на величину /т, где f - полюсное деление, гт - число фаз..
СОЮЗ СОВЕТСКИХ
СОЦИАЛИСТИЧЕСНИХ
РЕСПУБЛИК (19) (11) за Н 02 К 41 025
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ ц, ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР
ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ (21) 3439601/24-07 (22) 20.05.82 (46) 23.12.84. Бюл. У 47 (72) Ю.В.Смирнов (71) Завод-ВТУЗ при Московском автомобильном заводе им. И.А.Лихачева (53) 621.313.333(088.8) (56) 1. Ивоботенко Б.А. и др. Электропривод с новыми линейными электродвигателями переменного тока. — В сб.: Автоматизированный электропривод.
N. "Энергия", 1980, с. 250-256.
2. Lazarus I Н. Liddiard R.Ñ., Enslin N.Ñ. Application of linear
motor to the hydraulis transportation
of.ore. — "conf. Linear Elec. Mach.
London, 1974, р. 56-61. (54) (57) 1 . 1(ИЛИНДРИЧЕСКИЙ ЛИНЕЙНЫЙ
АСИНХРОННЫЙ ДВИГАТЕЛЬ, содержащий якорь и индуктор с отдельными продольными магнитопроводами и многофазной сосредоточенной обмоткой, о т л и— ч а ю шийся тем, что, с целью обеспечения низкой синхронной скорости и уменьшения габаритов двигателя, на каждом магнитопроводе расположены катушки одной фазы, а сам магнитопровод сдвинут в осевом направлении относительно соседнего магнитопровода на величину ? „ /m, где in — полюсное деление, tn — число фаз..
11
2. Двигатель по п. 1, о т л и— чающий ся тем, что, сцелью повьппения жесткости якоря, на его торцах закреплены фланцы, а между магнитопроводами на индукторе распо30975 ложены подшипники, причем пар аллельно оси якоря установлены направляющие, жестко соединенные с фланцами и проходящие через подшипники, Изобретение относится к линейным электроприводам и может быть использовано в системах автоматического управления металлорежущими станками, автоматическими линиями ипромьппленны- 5 ми роботами.
Известен цилиндрический линейный асинхронный двигатель, содержащий якорь и индуктор из чередующихся пакетов ферромагнитных дисков и плас— тинчатых спиральных катушек.
Поверхностный слой ферромагнитного якоря представляет собой чередующуюся структуру из ферромагнитного и не— магнитного проводникового материала (1 ).
Однако такие электродвигатели конструктивно сложны, нетехнологичны, а наличие в их якоре чередующихся стыков ферромагнитного и проводнико- 20 ного материала затрудняет выполнение надежных подшипниковых узлов.
Наиболее близким по технической сущности к изобретению является цилиндрический линейный асинхронный 25 двигатель, содержащий якорь и индуктор с отдельными продольными магнитопроводами и многофазной сосредоточенной обмоткой (2 3.
Катушки сосредоточенной обмотки З0 двигателя имеют форму дисков, плоскость которых перпендикулярна оси машины.
Недостатками известного двигателя являются невозможность получения низкой синхронной скорости и малая жесткость якоря — подвижного элемен1 та.
Цель изобретения — обеспечение низкой синхронной скорости и умень- 40 шение габаритов двигателя.
Указанная цель достигается тем, что в цилиндрическом линейном асинхронном двигателе, содержащем якорь и индуктор с отдельными продольными магнитопроводами и многофазной сосредоточенной обмоткой, на каждом магнитопроводе расположены катушки одной фазы, а сам магнитопровод сдвинут в осевом направлении относительно соседнего магнитопровода на величину ?С„/rn, где i„ — полюсное деление tn — число фаз.
Для повышения жесткости якоря на его торцах закреплены фланцы, а между магнитопроводами на индукторе раэ— мещены подшипники, причем параллель— но оси якоря установлены направляющие, жестко соединенные с фланцами и проходящие через подшипники.
На фиг..1 изображен двигатель, поперчный разрез; на фиг. 2 — то же, продольный разрез (для случая re=3), на фиг. 3 — взаимное расположение магнитопроводов и схема соединения обмоток.
Цилиндрический линейный асинхронный двигатель содержит шихтованные магнитопроводы 1, сосредоточенные .обмотки 2, ферромагнитный якорь 3 с проводниковым или чередующимся
-поверхностным слоем 4, стальные нап— равляющие 5, подшипники 6 скольжения, немагнитный корпус 7, немагнитные крышки 8 и стальные фланцы 9. Для удобства крепления длина магнитопроводов принята одинаковой. Торцы. магнитопроводов 1 входят в вырезы крышек 8, которые в свою очередь крепятся винтами к корпусу 7. Предлагаемая конструкция электродвигателя позволяет вместо подшипников .скольжения применить подшипники качения.
Двигатель работает следующим образом.
При подключении обмоток к сети пульсирующие магнитные потоки фаз взаимодействуют с токами, наводящимися в поверхностном слое якоря этими потоками, создавая тяговое усилие.
Причем . токи, созданные магнитным
1130975
3 потоком каждой фазы, распространяются в зону действия магнитных потоков других фаз.
Синхронная скорость якоря предлагаемого двигателя в m раз меньше синхронной скорости известных электродвигателей, поскольку конструкция предлагаемого двигателя обеспечивает в In раз меньшее полюсное деление при той же ширине полюса.
Отдельные направляющие 5 обеспе— чивают дополнительную жесткость якорю 3, а размещение подшипников 6 между магнитопроводами 1 индуктора делает двигатель компактным.
Конструкция предлагаемого двигателя проста и технологична. Иагнитопроводы собираются из штампованных пластин. Катушки со сосредоточенньии обмотками просты в изготовлении и весьма надежны. Корпус и крышки могут быть выполнены литыми. Якорь представляет собой стальную трубу, на поверхности которой организован тем или иным способом проводниковый слой.
Малые габариты цилиндрического линейного асинхронного двигателя обусловлены высоким использованием активных материалов и небольшим рассеянием магнитных потоков.
1 1 30975
Составитель Н.Орлов
Техред Л.Мартяшова Корректор M.Розман
Редактор Аг.Шандор
Филиал НПП "Патент", r.Óæãîðîä, ул.Проектная, 4
Заказ 9623/41 Тираж 666 Подписи ое
ВНИИПИ Государственного комитета СССР
II0 делам изобретений и открьггий
113035, Москва, Ж-35, Раушская наб., д. 4/5




www.findpatent.ru