Современные тенденции в развитии линейных сервоприводов. Линейный двигатель принцип работы
Линейные электродвигатели. Основные разновидности и их применение | RuAut
Назначение и типы линейных электродвигателей
Ротационные электродвигатели обычно предназначены для реализации вращательного движения рабочего механизма. Иногда эти двигатели осуществляют поступательные или возвратно-поступательные движения. Достигается это при помощи кинематических передач усложняющих конструкцию и снижающих коэффициент полезного действия привода. Применение линейных электродвигателей позволяет устранить эти недостатки.
В ротационных электродвигателях индуктор представляет собой цилиндр, внутри которого вращается ротор. В плоских линейных электродвигателях индуктор развернут на плоскости. Индуктор цилиндрического линейного электродвигателя - цилиндр, внутри которого линейно перемещаются вторичные элементы.
Основные типы линейных электродвигателей: линейные асинхронные электродвигатели, линейные синхронные электродвигатели, линейные электродвигатели постоянного тока, линейные шаговые электродвигатели. Наибольшее применение получили линейные асинхронные электродвигатели. Первичная обмотка асинхронного линейного электродвигателя возбуждает бегущее электромагнитное поле. В результате взаимодействия первичного поля и индуктируемых токов во вторичном элементе возникает тяговое усилие. Вторичный элемент прямолинейно перемещается. В линейных асинхронных электродвигателях имеют место ухудшающие характеристики краевые эффекты. Разомкнутость магнитной цепи в продольном направлении вызывает продольный краевой эффект. Увеличение числа полюсов индуктора снижает продольный краевой эффект. Наличие на краях вторичного элемента продольных составляющих токов, не создающих полезное тяговое усилие - поперечный краевой эффект. Увеличение ширины вторичного элемента снижает влияние поперечного краевого эффекта. Итак, принцип действия как ротационных, так и линейных электродвигателей имеет одну и ту же физическую природу.
Применение линейных электродвигателей
Линейные электродвигатели применяются там, где они упрощают конструкцию, повышают производительность машин и оборудования, или в тех случаях, когда использование ротационных электродвигателей по их характеристикам невозможно. Применение линейных электродвигателей наиболее перспективно в промышленном и пассажирском транспорте. В конвейерных поездах индукторы электропривода расположены вдоль рельсового пути, вторичный элемент электродвигателя находится на подвижном составе. Такие поезда удобны при транспортировке угля, руды и строительных материалов. На примере системы городского эстакадного пассажирского транспорта показан другой вариант исполнения линейного электродвигателя, где вторичный элемент установлен вдоль пути в виде токопроводящей вертикальной полосы. А индукторы установлены в движущемся вагоне. Линейные асинхронные электродвигатели широко применяются в приводах различных исполнительных механизмов и устройств. В приводах разъединителей тяговых подстанций цилиндрический линей электродвигатель существенно упрощает конструкцию, повышает быстродействие и эксплуатационную надежность оборудования.
В ряде случаев, вторичным элементом двигателя может быть и деталь рабочего механизма. Привод поворотного стола манипулятора осуществлен на базе плоских линейных электродвигателей, что обеспечивает высокую точность углового позиционирования стола и существенно упрощает механическую часть устройства. В отдельных случаях, линейные асинхронные электродвигатели могут эффективно выполнять сразу несколько целевых функций. Литейная карусельная машина. Ее привод реализован на линейных электродвигателях плоского исполнения. Он может перемещать и при технологической необходимости подогревать из ложницы. Коэффициент полезного действия таких приводов значительно выше, чем КПД приводов с одной целевой функцией.
Принцип работы линейного асинхронного электродвигателя может быть использован при создании других электромагнитных устройств, например в сепараторах цветных металлов. Линейные электродвигатели успешно применяются в различных системах внутрицехового транспорта. Основными преимуществами линейных электродвигателей являются возможность получения непосредственного прямолинейного движения, больших скоростей и ускорений, простота конструкции, бесшумность и надежность работы. Развитие микропроцессорной техники и разработка новых средств управления позволяют постоянно расширять области эффективного применения линейных электродвигателей.
ruaut.ru
Линейные асинхронные двигатели (лад) (Спец. Аид)
Во многих производственных механизмах, транспортных средствах и приборных устройствах рабочий орган совершает поступательное или возвратно-поступательное движение. Для привода этих устройств и механизмов используют двигатели с вращательным движением ротора и промежуточным кинематическим звеном для преобразования вращательного движения в линейное. Такое звено усложняет привод, вызывает дополнительные потери мощности, снижает КПД и надежность.
Кинематика привода указанных устройств упрощается, если использовать линейный электродвигатель, у которого подвижная часть совершает поступательное или возвратно-поступательное движение. Наибольшее применение получили линейные асинхронные двигатели (ЛАД).
Принцип действия ЛАД основан на способности многофазной (трехфазной) системы токов создавать бегущее магнитное поле. Если в обычном асинхронном двигателе статор цилиндрической формы разрезать вдоль его оси и развернуть в плоскость, то получим статор линейного двигателя, называемый индуктором 1.
Если обмотку индуктора соединить звездой или треугольником и включить в трехфазную сеть, то возникает магнитное поле, ось которого будет перемещаться вдоль развернутой поверхности сердечника индуктора с синхронной скоростью v1. Такое магнитное поле называют бегущим.
Синхронная скорость бегущего поля пропорциональна частоте тока f1 и длине индуктора L1 и обратно пропорциональна числу пар полюсов в обмотке индуктора р.
Вблизи индуктора, параллельно ему, расположен вторичный элемент, состоящий из магнитопровода 2, в пазы которого заложены алюминиевые или медные стержни 3 короткозамкнутой обмотки. Бегущее поле индуктора, сцепляясь со стержнями 3 короткозамкнутой обмотки, будет наводить в них ЭДС Е2, которая создаст токи Iа. Взаимодействуя с бегущим магнитным полем, эти токи создают электромагнитные силы Рэм, стремящиеся сместить магнитопроводы индуктора и вторичного элемента относительно друг друга в противоположных направлениях. Если один из магнитопроводов, например индуктора, закрепить неподвижно, то другой магнитопровод, называемый в этом случае бегунком, будет линейно перемещаться относительно первого в направлении движения бегущего поля. В итоге электроэнергия, поступающая в обмотку индуктора из сети, будет преобразовываться в механическую энергию линейного (поступательного) движения.
Если неподвижным сделать вторичный элемент, то бегунком станет индуктор, который будет перемещаться линейно в направлении, противоположном движению создаваемого им бегущего поля.
№ 26
Синхронные реактивные двигатели (Спец. Исд)
Отличительная особенность синхронных реактивных двигателей (СРД) - отсутствие у них возбуждения со стороны ротора. Основной магнитный поток в этом двигателе создается исключительно за счет МДС обмотки статора. В двух- и в трехфазных СРД эта МДС является вращающейся.
Принцип действия СРД заключается в следующем. При включении обмотки статора в сеть возникает вращающееся магнитное поле Как только ось этого поля d'— d' займет положение в пространстве расточки статора, при котором она будет смещена относительно продольной оси невозбужденных полюсов ротора d—d на угол θ в сторону вращения, между полюсами этого поля и выступающими полюсами невозбужденного ротора возникнет реактивная сила магнитного притяжения полюса ротора к полюсу вращающегося поля статора Fy. Вектор этой силы Fp смещен относительно продольной оси ротора также на угол θ, поэтому сила Fpимеет две составляющие: нормальную Fnp, направленную перпендикулярно продольной оси, и тангенциальную Ftp полюсов ротора.
Совокупность тангенциальных составляющих реактивных сил Ftp на всех полюсах невозбуждённого ротора создаст вращающий реактивный момент Мр, который будет вращать ротор с синхронной частотой w1. С ростом механической нагрузки на вал СРД угол θ увеличивается и момент Мр растет.
Однако при значении угла θ = 90° реактивный момент Мр=0. Такая зависимость момента Мр от угла θ является принципиальной для реактивного момента, отличающей его от основной составляющей электромагнитного момента Мосн синхронного двигателя с возбужденным ротором, который при θ = 90° имеет максимальное значение. Из рис.2.9, б видно, что при θ = 90° реактивные силы магнитного притяжения Рмр действующие на каждый полюс невозбужденного ротора, взаимно уравновешиваются и реактивный момент Мр = 0. Максимальное значение реактивного момента Мmах наступает при значении угла θ º=45.
Мощность СРД и развиваемый им момент меньше чем у синхронного двигателя с возбужденными полюсами ротора. Объясняется это тем, что у СРД из-за отсутствия магнитного потока ротора ЭДС Е0=θ, поэтому основная составляющая электромагнитного момента Mосн=0 и электромагнитный момент СРД определяется лишь реактивной составляющей (М=Мр). Следовательно, при одинаковых габаритах синхронного двигателя с возбужденными полюсами ротора и СРД мощность на валу и развиваемый момент у СРД намного меньше.
№ 27
АСИНХРОННЫЕ ДВИГАТЕЛИ С ВНЕШНИМ РОТОРОМ (Спец. АИД)
Статор этих двигателей находится внутри ротора. Такие конструкции называют обращенными.
Асинхронный двигатель с внешним ротором состоит из шихтованного сердечника статора 10, собранного на втулке 9, которая напрессована на стальную не вращающуюся ось 7. Трехфазная обмотка статора 6 имеет три вывода 1, которые проходят через полую часть 2 оси 7. Внешний ротор состоит из шихтованного сердечника 4, в пазах которого расположены стержни обмотки, замкнутые с двух сторон замыкающими кольцами. Наружная поверхность ротора образована ободом 11, форма которого зависит от назначения двигателя, то есть он может быть колесом, шкивом, роликом или просто массивным элементом — маховиком. С двух сторон обод закреплен крышками 3 посредством винтов 5 Крышки 3 сочленяются с подшипниками 8.
Асинхронные двигатели с внешним ротором применяют в электроинструменте, в рольганге на металлургических предприятиях
(внешний ротор двигателя — это вращающийся ролик рольганга), в качестве двигателя-маховика для привода устройств, требующих равномерного вращения при неравномерной нагрузке на вал.
Однако самое широкое применение эти двигатели получили в гироскопических приборах в качестве гиродвигателей. Гироскопические приборы составляют основу навигационной техники в судостроении, авиации и ракетостроении. Основной элемент гироскопического прибора — гироскоп, то есть массивный цилиндрический ротор. Приведенный в быстрое вращение, этот ротор сохраняет неизменным положение в пространстве своей оси вращения. Чем больше частота вращения ротора, тем эффективнее проявляется это свойство.
№ 28
studfiles.net
Линейный двигатель - это... Что такое Линейный двигатель?
Лине́йный дви́гатель — электродвигатель, у которого один из элементов магнитной системы разомкнут и имеет развёрнутую обмотку, создающую магнитное поле, а другой взаимодействует с ним и выполнен в виде направляющей, обеспечивающей линейное перемещение подвижной части двигателя. Сейчас разработано множество разновидностей (типов) линейных электродвигателей, например, линейные асинхронные электродвигатели (ЛАД), линейные синхронные электродвигатели, линейные электромагнитные двигатели, линейные магнитоэлектрические двигатели, линейные магнитострикционные двигатели, линейные пьезоэлектрические (электрострикционные) двигатели и др.
Многие типы линейных двигателей, такие как асинхронные, синхронные или постоянного тока, повторяют по принципу своего действия соответствующие двигатели вращательного движения, в то время как другие типы линейных двигателей (магнитострикционные, пьезоэлектрические и др.) не имеют практического исполнения как двигатели вращательного движения. Неподвижную часть линейного электродвигателя, получающую электроэнергию из сети, называют статором, или первичным элементом, а часть двигателя, получающая энергию от статора, называют вторичным элементом или якорем (название "ротор" к деталям линейного двигателя не применяется, т.к. слово "ротор" буквально означает "вращающийся", а в линейном двигателе вращения нет). Наибольшее распространение в транспорте и для больших линейных перемещений получили асинхронные и синхронные линейные двигатели, но применяются также линейные двигатели постоянного тока и линейные электромагнитные двигатели. Последние чаще всего используются для получения небольших перемещений рабочих органов и обеспечения при этом высокой точности и значительных тяговых усилий.
Асинхронный линейный двигатель
Представление об устройстве линейного асинхронного двигателя можно получить, если мысленно разрезать статор и ротор с обмотками обычного асинхронного двигателя вдоль оси по образующей и развернуть в плоскость. Образовавшаяся плоская конструкция представляет собой принципиальную схему линейного двигателя. Если теперь обмотки статора такого двигателя подключить к сети трехфазного переменного тока, то образуется магнитное поле, ось которого будет перемещаться вдоль воздушного зазора со скоростью V, пропорциональной частоте питающего напряжения f и длине полюсного деления t: V = 2tf. Это перемещающееся вдоль зазора магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой по обмотке начнут протекать токи. Взаимодействие токов с магнитным полем приведет к появлению силы, действующей, по правилу Ленца, в направлении перемещения магнитного поля. Ротор — в дальнейшем будем называть его уже вторичным элементом — под действием этой силы начнет двигаться. Как и в обычном асинхронном двигателе, перемещение элемента происходит с некоторым скольжением относительно поля S = (V - v)/V, где v - скорость движения элемента. Номинальное скольжение линейного двигателя равно 2-6%. [1] Вторичный элемент линейного двигателя не всегда снабжается обмоткой. Одно из достоинств линейного асинхронного двигателя заключается в том, что в качестве вторичного элемента может использоваться обычный металлический лист. Вторичный элемент при этом может располагаться также между двумя статорами, или между статором и ферромагнитным сердечником. Вторичный элемент выполняется из меди, алюминия или стали, причем использование немагнитного вторичного элемента предполагает применение конструктивных схем с замыканием магнитного потока через ферромагнитные элементы. Принцип действия линейных двигателей со вторичным элементом в виде полосы повторяет работу обычного асинхронного двигателя с массивным ферромагнитным или полым немагнитным ротором. Обмотки статора линейных двигателей имеют те же схемы соединения, что и обычные асинхронные двигатели, и подключаются обычно к сети трехфазного переменного тока. Линейные двигатели очень часто работают в так называемом обращенном режиме движения, когда вторичный элемент неподвижен, а передвигается статор. Такой линейный двигатель, получивший название двигателя с подвижным статором, находит, в частности, широкое применение на электрическом транспорте. Например, статор неподвижно закреплен под полом вагона, а вторичный элемент представляет собой металлическую полосу между рельс, а иногда вторичным элементом служат сами рельсы. Одной из разновидностей линейных асинхронных двигателей являются трубчатый (коаксиальный) двигатель. Статор такого двигателя имеет вид трубы, внутри которой располагаются перемежающиеся между собой плоские дисковые катушки (обмотки статора) и металлические шайбы, являющиеся частью магнитопровода. Катушки двигателя соединяются группами и образуют обмотки отдельных фаз двигателя. Внутри статора помещается вторичный элемент также трубчатой формы, выполненный из ферромагнитного материала. При подключении к сети обмоток статора вдоль его внутренней поверхности образуется бегущее магнитное поле, которое индуцирует в теле вторичного элемента токи, направленные по его окружности. Взаимодействие этих токов с магнитным полем двигателя создает на вторичном элементе силу, действующую вдоль трубы, которая и вызывает (при закрепленном статоре) движение вторичного элемента в этом направлении. Трубчатая конструкция линейных двигателей характеризуется аксиальным направлением магнитного потока во вторичном элементе в отличие от плоского линейного двигателя, в котором магнитный поток имеет радиальное направление.
Синхронный линейный двигатель
Схема синхронного линейного двигателя.Основной областью применения синхронных двигателей, где их преимущества проявляются особенно сильно, является высокоскоростной электрический транспорт. Дело в том, что по условиям нормальной эксплуатации такого транспорта необходимо иметь сравнительно большой воздушный зазор между подвижной частью и вторичным элементом. Асинхронный линейный двигатель имеет при этом очень низкий коэффициент мощности (cosφ), и его применение оказывается экономически невыгодным. Синхронный линейный двигатель, напротив, допускает наличие относительно большого воздушного зазора между статором и вторичным элементом и работает при этом с cosφ, близким к единице, и высоким КПД, достигающем 96%. Применение синхронных линейных двигателей в высокоскоростном транспорте сочетается, как правило, с магнитной подвеской вагонов и применением сверхпроводящих магнитов и обмоток возбуждения, что позволяет повысить комфортабельность движения и экономические показатели работы подвижного состава.
Применение линейных двигателей
- Широкое применение линейные двигатели нашли в электрическом транспорте, чему способствовал целый ряд преимуществ этих двигателей: прямолинейность движения вторичного элемента (или статора), что естественно сочетается с характером движения различных транспортных средств, простота конструкции, отсутствие трущихся частей (энергия магнитного поля непосредственно преобразуется в механическую), что позволяет добиться высокой надежности и КПД. Еще одно преимущество связано с независимостью силы тяги от силы сцепления колес с рельсовым путем, что недостижимо для обычных систем электрической тяги. При использовании линейных двигателей исключается буксование колес электрического транспорта (именно этой причиной был обусловлен выбор линейного двигателя для ММТС), а ускорения и скорости движения средств транспорта могут быть сколь угодно высокими и ограничиваться только комфортабельностью движения, допустимой скоростью качения колес по рельсовому пути и дороге, и динамической устойчивостью ходовой части транспорта и пути.
- Линейные асинхронные двигатели применяются для привода механизмов транспортировки грузов различных изделий. Такой конвейер имеет металлическую ленту, которая проходит внутри статоров линейного двигателя, являясь вторичным элементом. Применение линейного двигателя в этом случае позволяет снизить предварительное натяжение ленты и устранить ее проскальзывание, повысить скорость и надежность работы конвейера.
- Линейный двигатель может применяться для машин ударного действия, например сваезабивных молотов, применяемых при дорожных работах и строительстве. Статор линейного двигателя располагается на стреле молота и может перемещаться по направляющим стрелы в вертикальном направлении с помощью лебедки. Ударная часть молота является одновременно вторичным элементом двигателя. Для подъема ударной части молота двигатель включается таким образом, чтобы бегущее поле было направлено вверх. При подходе ударной части к крайнему верхнему положению двигатель отключается и ударная часть опускается вниз на сваю под действием силы тяжести. В некоторых случаях двигатель не отключается, а реверсируется, что позволяет увеличить энергию удара. По мере заглубления сваи статор двигателя перемещается вниз с помощью лебедки. Электрический молот прост в изготовлении, не требует повышенной точности изготовления деталей, нечувствителен к изменению температуры и может вступать в работу практически мгновенно.
- Разновидностью линейного двигателя можно считать магнитогидродинамический насос. Такие насосы применяются для перекачки электропроводящих жидкостей и в том числе жидких металлов, и широко применяются в металлургии для транспортировки, дозировки и перемешивания жидкого металла, а также на атомных электростанциях для перекачки жидкометаллического теплоносителя. Магнитогидродинамические насосы могут быть постоянного или переменного тока. Для насоса постоянного тока первичным элементом — статором двигателя постоянного тока — является С-образный электромагнит. В воздушный зазор электромагнита помещается трубопровод с жидким металлом. С помощью электродов, приваренных к стенкам трубопровода, через жидкий металл пропускается постоянный ток от внешнего источника. Часто обмотка возбуждения включается последовательно в цепь электродов. При возбуждении электромагнита на металл в зоне прохождения постоянного тока начинает действовать электромагнитная сила аналогично тому, как она действовала на проводник с током, помещенным в магнитное поле. Под действием этой силы металл начнет перемещаться по трубопроводу. Преимуществами МГД-насосов являются отсутствие движущихся механических частей и возможность герметизации канала транспортировки металла. [2]
Линейные двигатели высокого и низкого ускорения
Все линейные двигатели их можно разделить на две категории:
- двигатели низкого ускорения
- двигатели высокого ускорения
Двигатели низкого ускорения используются в общественном транспорте (маглев, монорельс, метрополитен) как тяговые, а также в станках (лазерных, водорезных, сверлильно-фрезерных) и другом технологическом оборудовании в промышленности. Двигатели высокого ускорения весьма небольшие по длине, и обычно применяются, чтобы разогнать объект до высокой скорости, а затем выпустить его (см. пушка Гаусса). Они часто используются для исследований гиперскоростных столкновений, а также в специальных устройствах, таких, как оружие[источник не указан 308 дней] или пусковые установки космических кораблей[каких?].
Линейные двигатели широко используются также в приводах подачи металлорежущих станков и в робототехнике. Для повышения точности позиционирования часто используются линейные датчики положения.
Источники
- ↑ Линейные асинхронные двигатели - Принцип действия
- ↑ Линейные электродвигатели
Ссылки
dic.academic.ru
Современные тенденции в развитии линейных сервоприводов
Исторически сложилось, что промышленность так или иначе зависит от разного рода винтовых и ременных передач или пневматических механизмов для решения задач линейного позиционирования. Но растущий спрос на увеличение скорости пропускной способности, миллионы рабочих циклов, гибкость настройки и программирования выявил недостатки данных механизмов. Зачастую приходится идти на компромисс, если дело доходит до точного контролируемого позиционирования в поступательном движении.
В последнее время производители пневмоприводов обновили устройства управления пневматических цилиндров с внешними регулирующими клапанами, датчиками положения и сервоэлектроникой в целях решения некоторых из этих трудностей. Но не так просто построить замкнутую систему позиционирования, учитывая высокий коэффициент трения и динамическую вязкость сжатого воздуха. Управление становится проблематичным из-за упругости и трения воздуха, а также трения поршня.
Технология непосредственного привода линейного двигателя обеспечивает значительно лучший подход к решению задач позиционирования. Данная технология предполагает прямое применение силы электромагнитного взаимодействия без использования ремня, шариковинтовой передачи или иного промежуточного звена. Линейный привод производит непосредственное линейное перемещение, а не преобразует вращательное движение в поступательное.
- 1. Устройство линейного двигателя
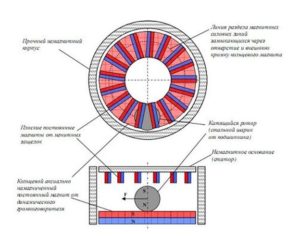
 Самый простой способ описать устройство линейного двигателя – это представить двигатель вращения с постоянными магнитами, разрезанный вдоль и развернутый в плоскость. Традиционные линейные двигатели имеют именно такую конструкцию.
Самый простой способ описать устройство линейного двигателя – это представить двигатель вращения с постоянными магнитами, разрезанный вдоль и развернутый в плоскость. Традиционные линейные двигатели имеют именно такую конструкцию.
Новые линейные двигатели, так называемые tubular linear actuator, имеют форм-фактор соленоида.
Сам двигатель находится в пределах немагнитного корпуса из нержавеющей стали, так называемой каретки. Самонесущая обмотка находится внутри каретки вместе с подшипником скольжения изготовленного из специального полимерного материала. Внутри обмотки размещается подвижный элемент – шток. Шток представляет собой полый немагнитный цилиндр из нержавеющей стали, в котором размещены небольшие сверхпрочные редкоземельные магниты в форме таблеток. Подвижный шток является ключевым компонентом двигателя, он воплощает в себе запатентованный дизайн, который позволяет создать точное синусоидальное магнитное поле по всей его длине. Данная особенность позволяет использовать интегрированные в корпус двигателя датчики обратной связи вместо традиционных внешних датчиков положения. Это важно, поскольку внешние датчики линейных перемещений зачастую могут стоить почти столько же, сколько и сам привод, кроме того, они сами являются высокоточными устройствами, которые требуют специальных условий окружающей среды, точной настройки и технического обслуживания. Интегрированные датчики Холла располагаются на электронной плате под защитной крышкой каретки.
Трубчатый форм-фактор дает поразительные преимущества. Данное исполнение обеспечивает математически идеальную ориентацию магнитного поля между обмотками каретки двигателя и магнитным штоком. Все магнитные силовые линии пересекают проводники с током под прямым углом. Такая ориентация позволяет создать максимальное усилие и эффективность. Высокая эффективность в свою очередь означает минимальное количество выделяемого тепла, которое максимизирует количество рабочих циклов.
Линейным электродвигателем можно управлять с помощью любого трехфазного серводрайвера постоянного тока, который также имеет sin/cos интерфейс обратной связи. Тем не менее лучших динамических показателей можно достичь только при использовании драйверов, специально оптимизированных для работы с линейными двигателями. В частности, такие виды контроллеров движения предлагает компания Copley Controls.
- 2. Вращательное движение в поступательное.
Как правило, вращательное движение преобразуют в поступательное посредством следующих решений:
– Винт-гайка скольжения– Шарико-винтовая передача (ШВП)– Шестерня-рейка– Ременная передача.
Кратко рассмотрим данные преобразующие передачи.
2.1. Передача винт-гайка скольжения: представляют собой приводной механизм, служащий для преобразования вращательного движения винта в поступательное движение гайки; работает на принципе трения-скольжения.
Преимущества: низкая цена, необратимый ход, высокое развиваемое усилие.
Недостатки: как правило, эффективность данной передачи зависит от типа приводного двигателя и составляет приблизительно 10–40%; устройству свойственны износ и постоянно нарастающий люфт; винт необходимо содержать в чистоте, даже небольшое загрязнение может привести к снижению эффективности или заклиниванию системы.
2.2.ШВП: принцип работы тот же, что и у передачи винт-гайка, за исключением того, что гайка содержит винтовые канавки криволинейного профиля. Канавки служат дорожками качения для шариков, которые перемещаются между витками винта и гайки. Перемещение шариков происходит по замкнутой траектории – при вращении винта шарики вовлекаются в движение по винтовым канавкам, поступательно перемещают гайку и через перепускной канал возвращаются в исходное положение.
Преимущества: передача имеет очень высокую степень эффективности – до 98%, большой срок эксплуатации, высокую точность и малый люфт. Недостатки: высокая стоимость; при использовании ШВП необходимо учитывать значительные аксиальные нагрузки, наводимые на выходной вал двигателя, как следствие, требуется применение дополнительной подшипниковой опоры; винт также необходимо содержать в чистоте во избежание заклинивания.
2.3.Шестерня-рейка: шестерня, вращаясь на валу двигателя, приводит в движение зубчату рейку. Преимущества: являет собой достаточно эффективное решение в экономическом плане, также подходит для применений, где требуется большая длина перемещений, большое усилие и точность; эффективность передачи достигает 95%.
Недостатки: как правило, конструкция имеет люфт, для уменьшения люфта необходимо изготавливать контактные зубья с более высокой точностью либо увеличить прижимную силу между шестерней и рейкой, высокая прижимная сила вызывает большие радиальные нагрузки на выходной вал двигателя или редуктора; при движении существует небольшая пульсация скорости; движение носит относительно шумный характер.
2.4.Ременная передача: шкив на валу вращает ремень, который перемещает нагрузку в линейном направлении.
 Преимущества: недорогое решение, точность не лучше 50 мкм.
Преимущества: недорогое решение, точность не лучше 50 мкм.
Недостатки: ремень подвержен износу при высоких скоростях и нагрузках; ремень может растягиваться; малый люфт требует высокую степень натяжения ремня, это в свою очередь увеличивает радиальные нагрузки на выходном валу.
Что касается линейных двигателей, то они вобрали практически все преимущества описанных выше устройств и исключили большинство их недостатков. Например, отсутствие винта, гайки и прочих механических узлов делает линейный сервопривод малошумным устройством. Отсутствие элементов, подверженных износу, увеличивает срок эксплуатации двигателей. Например, если необходима высокая точность позиционирования при небольших нагрузках и высоких скоростях, то линейный двигатель способен обеспечить гораздо больший срок эксплуатации, чем сервопривод с ШВП. По тем же причинам линейные приводы в трубчатом форм-факторе не испытывают инерции, отсутствуют такие факторы, как гистерезис и люфт. Результатом является превосходная динамическая жесткость.
Наконец, трубчатые линейные двигатели сегодня находятся не на их физическом пределе. Требования будущих приложений создает необходимость в постоянном уменьшении приводов и в увеличении их чувствительности. Поэтому предел размеров двигателя зависит от стоимости, а не от фундаментальной физики.
3. Линейные серводвигатели Faulhaber
 Для реализации особо точного программируемого линейного движения Faulhaber предлагает серию линейных серводвигателей.
Для реализации особо точного программируемого линейного движения Faulhaber предлагает серию линейных серводвигателей.
Эти приводы при компактном размере (двигатель LM2070 – 20 мм сторона квадрата каретки и 70 мм длина) развивают усилия до 27 Н, могут использоваться как в режиме двигателя (двигается каретка при зафиксированном вале), так и в режиме актуатора (двигается вал, каретка зафиксирована). Благодаря интегрированным линейным датчикам Холла, могут быть достигнуты точности позиционирования до 120 мкм и повторяемости до 40 мкм без применения каких-либо внешних датчиков.
 Линейные серводвигатели не требуют смазки либо какого-либо дополнительного обслуживания при работе, бесшумны, развивают скорость до 3,2 м/с, а ускорения – до 198 м/с2. Линейные двигатели Faulhaber предлагаются с различной длиной штока. Доступны исполнения как для работы с компактными контроллерами производителя, так и с синусно-косинусной обратной связью, позволяющие реализовать управление с помощью ПЛК-контроллера. Кроме того, компания Faulhaber, предлагает контроллеры движения специально для работы с линейными двигателями, позволяющие реализовать полноценную настройку и конфигурацию линейного привода. Они свободно программируемы и поддерживают как последовательный интерфейс RS-232, так и сетевой интерфейс CAN.
Линейные серводвигатели не требуют смазки либо какого-либо дополнительного обслуживания при работе, бесшумны, развивают скорость до 3,2 м/с, а ускорения – до 198 м/с2. Линейные двигатели Faulhaber предлагаются с различной длиной штока. Доступны исполнения как для работы с компактными контроллерами производителя, так и с синусно-косинусной обратной связью, позволяющие реализовать управление с помощью ПЛК-контроллера. Кроме того, компания Faulhaber, предлагает контроллеры движения специально для работы с линейными двигателями, позволяющие реализовать полноценную настройку и конфигурацию линейного привода. Они свободно программируемы и поддерживают как последовательный интерфейс RS-232, так и сетевой интерфейс CAN.
4. Линейные серводвигател Dunkermotoren
Линейные серводвигатели Dunkermotoren серии ServoTube доступны в двух исполнениях:
1. Двигатели прямого привода, предназначенные для реализации работы в режиме актуатора (подвижный шток двигателя).
2. Компоненты линейных сервосистем, предназначенные для использования в качестве OEM-комплектующих и требующие установки дополнительных подшипников. С помощью таких компонент возможно реализовать работу двигателя с нагрузкой, приложенной непосредственно к каретке при зафиксированном штоке.
 В состав двигателя входит интегрированный датчик обратной связи по положению, обеспечивающий повторяемость до 12 микрон. В линейные серводвигатели Dunkermotoren интегрированы линейные подшипники, обеспечивающие долгий срок службы изделия и не требующие дополнительной смазки и другого обслуживания. Серия линейных серводвигателей ServoTube может похвастать диапазоном развиваемых скоростей до 9,4 м/с и ускорений до 586 м/с2. Актуаторы характеризуются классом защиты IP67 и развивают постоянное рабочее усилие от 7 до 276 Н при долговременных нагрузках. Все двигатели соответствуют индустриальным стандартам, что позволяет провести их быстрое внедрение в уже работающие системы. Предлагается большое количество аксессуаров для интеграции актуаторов на базе линейных серводвигателей на замену пневмоцилиндров. Для комплектации с двигателями также предлагаются различные управляющие контроллеры от производителя двигателей.
В состав двигателя входит интегрированный датчик обратной связи по положению, обеспечивающий повторяемость до 12 микрон. В линейные серводвигатели Dunkermotoren интегрированы линейные подшипники, обеспечивающие долгий срок службы изделия и не требующие дополнительной смазки и другого обслуживания. Серия линейных серводвигателей ServoTube может похвастать диапазоном развиваемых скоростей до 9,4 м/с и ускорений до 586 м/с2. Актуаторы характеризуются классом защиты IP67 и развивают постоянное рабочее усилие от 7 до 276 Н при долговременных нагрузках. Все двигатели соответствуют индустриальным стандартам, что позволяет провести их быстрое внедрение в уже работающие системы. Предлагается большое количество аксессуаров для интеграции актуаторов на базе линейных серводвигателей на замену пневмоцилиндров. Для комплектации с двигателями также предлагаются различные управляющие контроллеры от производителя двигателей.
4.1. Специальная версия защищенных линейных серводвигателей
Специальная серия серводвигателей Dunkermotoren представляет собой мехатронные изделия, реализующие работу в режиме актуатора.
Двигатели этой серии отличаются корпусом, выполненным из нержавеющей стали и характеризуются классом защиты IP69K. Водяное охлаждение двигателей этой серии позволяет развить усилие до 460 Н. В двигатель интегрирован энкодер с разрешением 10 мкм, что обеспечивает повторяемость 25 мкм. режиме актуатора (подвижный шток). Питание двигателя осуществляется от трех фаз, величина питающего напряжения может достигать 600 В. Благодаря этому возможно использование как управляющей электроники, предлагаемой Dunkermotoren, так и контроллеров от сторонних производителей.
4.2. Модули линейного движения
 Модули линейного движения компании Dunkermotoren — это готовые к использованию и интеграции в создаваемые системы мехатронные решения. В основе модуля лежит линейный серводвигатель Dunkermotoren, оснащенный направляющей, концевыми выключателями, цепным шлейфом и другими сопутствующими компонентами. Опционально возможно оснащение модуля линейным энкодером с разрешением до 1 мкм для решения задач позиционирования с высокой точностью.
Модули линейного движения компании Dunkermotoren — это готовые к использованию и интеграции в создаваемые системы мехатронные решения. В основе модуля лежит линейный серводвигатель Dunkermotoren, оснащенный направляющей, концевыми выключателями, цепным шлейфом и другими сопутствующими компонентами. Опционально возможно оснащение модуля линейным энкодером с разрешением до 1 мкм для решения задач позиционирования с высокой точностью.
Модуль линейного движения может иметь от 1 до 3 степеней подвижности комплектуется всегда индивидуально по ТЗ заказчика. Использование модулей линейного движения на базе линейных серводвигателей является хорошей альтернативой приводам на базе шариковинтовых и ременных передач. Модули Dunkermotoren широко применяются в упаковочных машинах и других автоматических линиях.
Илья Герасимов, инженер ООО "Микропривод"
Фотографии предоставлены ООО "Микропривод"
konstruktor.net
Линейные электродвигатели
16.12.2014
Рахимов Андрей Валерьевич
студент Электроэнергетического факультета Ставропольский государственный аграрный университет г. Ставрополь, Россия
Аннотация: В статье рассматривается актуальность внедрения линейных электродвигателей в современные технологические процессы, раскрываются достоинства и недостатки данных электрических машин, приводятся примеры использования линейных электродвигателей.
Ключевые слова: Линейный электродвигатель, электрическая машина, магнитная система, обмотка, статор, механическая передача
Линейным электродвигателем называется электрический двигатель с одним разомкнутым элементом магнитной системы, обмотка которого развернута. Обмотка создает магнитное поле, с которым взаимодействует второй элемент магнитной системы, выполненный как направляющая деталь, обеспечивающая перемещение подвижной части линейного электродвигателя [1]. Если провести классификацию конструкций линейных электродвигателей, то можно выделить несколько типов. Основные из них – синхронные, асинхронные, электромагнитные, магнитоэлектрические, магнитострикционные и пьезоэлектрические линейные двигатели [3, 7]. По принципу действия они схожи с электродвигателями, создающими вращательное движение. В основном это синхронные, асинхронные и линейные электродвигатели постоянного тока. В линейном электродвигателе существует две части: первичная – неподвижная, получившая название «статор», и вторичная – подвижная, получившая название «якорь». Якорь электродвигателя получает энергию от статора через магнитное поле.
, 2 ротор (реактивная полоса)")
Рисунок 1 - Условная схема преобразования обычного электродвигателя в линейный:
1 –статор (индуктор), 2 ротор (реактивная полоса)
Линейный электродвигатель является основной частью прямого электропривода. Он создан для преобразования электрической энергии в энергию поступательного движения, т. е. без механической передачи. Такой электропривод состоит из средств управления и изменения скорости, что значительно упрощает конструкцию исполнительных органов и позволяет усовершенствовать различные технологические процессы [6, 8]. В линейном электродвигателе имеется, питаемый электрическим током, индуктор, который является первичным элементом, и специальная реактивная полоса – вторичный элемент (рисунок 1). Эти элементы отделены воздушным зазором. Магнитная система линейного электродвигателя представлена обмоткой определенной длинны, которая необходима для создания движущегося вдоль нее магнитного поля. Это и есть неподвижный элемент. Подвижный элемент благодаря взаимодействию с магнитным полем, перемещается вдоль обмотки.
Линейные электродвигатели подразделяются на асинхронные и синхронные. В асинхронном линейном электродвигателе реактивная полоса, выполненная в виде бруска прямоугольного сечения без обмоток, закрепленная вдоль путепровода, над которым перемещается электровоз, перемещающий подвижную часть (индуктор) двигателя. Его магнитопровод выполнен с развернутыми многофазными обмотками, питаемыми от источника переменного тока. Благодаря взаимодействию магнитного поля индуктора с полем реактивной полосы, возникают силы, заставляющие перемещаться с ускорением индуктор относительно неподвижной реактивной полосы. Это перемещение происходит до тех пор, пока скорости перемещения индуктора и бегущего магнитного поля реактивной полосы не сравняются. Преимуществом такой конструкции является размещение более простой в изготовлении реактивной полосы.
Основные достоинства линейного электропривода – это отсутствие механической передачи и вращающихся частей, простота в эксплуатации, большой технический ресурс. К основным недостаткам можно отнести сложность устройства и высокую стоимость изготовления, плохие энергетические показатели, связанные с наличием больших воздушных зазоров в магнитной цепи и ее разомкнутостью.
Наиболее часто используются линейные двигатели в электрическом транспорте. Этому способствует ряд преимуществ. Прямолинейный характер движения подвижной части, подходящий для движения различных транспортных средств. Энергия магнитного поля непосредственно преобразуется в механическую, что позволяет добиться высокого КПД. Важное преимущество линейных электродвигателей состоит в независимости силы тяги от силы сцепления колес с путем. Это невозможно для обычных систем электрической тяги. Благодаря использованию линейных электродвигателей проскальзывание колес исключается, а скорости движения транспорта могут быть довольно высокими и ограничиваются лишь комфортабельностью движения, максимально допустимой скоростью вращения колес, и динамической устойчивостью транспорта и пути.
В приводе механизмов транспортировки грузов различных изделий также применяются линейные асинхронные двигатели. Как правило, это конвейеры, имеющие ленту из металла, которая проходит внутри статоров линейного двигателя, являясь при этом вторичным элементом. Использование линейного электродвигателя позволяет снизить предварительное натяжение ленты и устранить ее проскальзывание, повысить скорость и надежность работы конвейера.
В сваезабивных молотах, используемых при дорожных работах или строительстве, также применяется линейный электропривод. Статор электродвигателя перемещается вдоль стрелы в вертикальном направлении при помощи лебедки. Ударная часть молота является одновременно вторичным элементом двигателя. Для ее подъема двигатель включается таким образом, чтобы бегущее поле было направлено вверх. Когда ударная часть поднимется к крайнему верхнему положению, двигатель отключается, и она опускается вниз на сваю под действием силы тяжести. Иногда двигатель не отключается, а реверсируется, это позволяет увеличить ударную энергию. При заглублении сваи статор двигателя перемещается вниз с помощью лебедки. Электрический молот прост в изготовлении, не требует повышенной точности изготовления деталей, нечувствителен к изменению температуры и может вступать в работу практически мгновенно.
Благодаря появлению линейных электродвигателей, усовершенствованы многие технологические процессы, начиная от создания нового вида гидравлических насосов и заканчивая усовершенствованием машинного доения животных [2, 4, 5]. Развитие науки и техники позволяет упростить выполнение технологических процессов и в конечном итоге снизить издержки производства, что необходимо для повышения конкурентоспособности отечественных производителей товаров.
Список литературы:
- Гринченко В. А. Обоснование базовой конструкции линейного электродвигателя // Theoretical & Applied Science. - 2013. - Т. 1. - №11 (7). - С. 58-60.
- Гринченко В. А. Обоснование конструктивно-режимных параметров доильного аппарата с электропульсатором на основе линейного двигателя: дис. ... канд. техн. наук: 05.20.01 - Технологии и средства механизации сельского хозяйства, 05.20.02 - Электротехнологии и электрооборудование в сельском хозяйстве. - Ставрополь, 2011. - 197 с.
- Никитенко Г. В., Гринченко В. А. Линейный двигатель возвратно-поступательного движения с регулированием амплитуды колебаний якоря // Методы и технические средства повышения эффективности использования электрооборудования в промышленности и сельском хозяйстве. - Ставрополь: Агрус, 2009. - С. 407-410.
- Никитенко Г. В., Гринченко В. А. Результаты исследования линейного двигателя для вакуумного пульсатора доильного аппарата // Методы и технические средства повышения эффективности использования электрооборудования в промышленности и сельском хозяйстве. - Ставрополь: Агрус, 2010. - С. 268-271.
- Никитенко Г. В., Гринченко В. А. Статика электромеханических процессов в линейном электродвигателе для привода пульсатора доильного аппарата // Методы и технические средства повышения эффективности использования электрооборудования в промышленности и сельском хозяйстве. - Ставрополь: Агрус, 2011. - С. 199-202.
- Пат. 2357143 Российская Федерация, МПК F 16 К 31/06. Электромагнитный клапан / Никитенко Г. В., Гринченко В. А.; заявитель и патентообладатель Ставроп. гос. аграр. ун-т. - № 2007141983/06; заявл. 12.11.07; опубл. 27.05.09.
- Пат. 2370874 Российская Федерация, МПК H 02 K 33/12. Линейный двигатель / Никитенко Г. В., Гринченко В. А.; заявитель и патентообладатель Ставроп. гос. аграр. ун-т. - № 2008112342/09; заявл. 31.03.08; опубл. 20.10.09.
- Пат. 82990 Российская Федерация, МПК А 01 J 7/00. Регулятор вакуума / Никитенко Г. В., Гринченко В. А.; заявитель и патентообладатель Ставроп. гос. аграр. ун-т. - № 2008150545/22; заявл. 19.12.08; опубл. 20.05.09.
2014 © Рахимов А.В.
nauka-rastudent.ru
Линейный электродвигатель
На протяжении многих лет промышленность зависит от различных ременных и винтовых передач, а также пневматических механизмов необходимых для выполнения линейного позиционирования. Спрос на высокоскоростную пропускную способность, многочисленные рабочие циклы, гибкую настройку и программирование позволил определить недостатки в этих устройствах. Часто при выполнении точного контролируемого позиционирования в поступательном движении приходится идти на компромисс.
Благодаря технологии непосредственного привода линейного двигателя достигается высокое качество решения задач линейного позиционирования. Эта технология подразумевает непосредственное использование силы электромагнитного взаимодействия без использования ремня, шариковинтовой передачи либо промежуточного звена другого вида. Линейный привод обеспечивает непосредственное линейное перемещение (преобразование вращательного движения в поступательное не происходит).
Электрический линейный двигатель является механизмом, в котором подвижная часть не находится во вращении (в традиционных вариантах двигателей подвижная часть вращается), а линейно перемещается вдоль неподвижной части агрегата, представленной в виде незамкнутого магнитопровода, длина которого имеет произвольное значение. Внутри магнитопровода создается бегущее магнитное поле. В стандартных электрических двигателях ротатор и статор свернуты в виде колец, а в линейном двигателе эти элементы растянуты в полосы. Благодаря тому, что обмотка статора включается поочередно, создается бегущее магнитное поле. В состав линейного электрического двигателя постоянного тока входит якорь с расположенной на его поверхности обмоткой, являющейся коллектором (направляющим элементом) и разомкнутый магнитопровод с обмотками возбуждения (подвижной частью), распложенными в таком порядке, что векторы сил, появляющихся в полюсах магнитопровода, имеют одно направление. Простота регуляции скорости перемещения подвижной части – отличительная черта линейного электродвигателя. Агрегаты переменного тока могут быть синхронного и асинхронного типа. Якорь в асинхронном линейном электродвигателе выполняется в виде бруска, чаще всего прямоугольного сечения, на котором отсутствует обмотка. Монтаж якоря выполняется вдоль пути перемещения подвижной части агрегата, оснащенной магнитопроводом с развернутыми многофазными обмотками, которые питаются от источника переменного тока. В результате взаимодействия магнитного поля магнитопровода подвижной части и поля якоря появляются силы, заставляющие подвижную часть перемещаться быстрее, относительно неподвижного якоря. Процесс происходит до момента уравнения скорости перемещения подвижной части и бегущего магнитного поля.
Чаще всего такие агрегаты используются в сфере электрического транспорта. Этому способствуют особые преимущества двигателей такого образца:
Прямолинейное движение статора отлично подходит для многих средств передвижения;
Простая конструкция, в которой отсутствуют трущиеся элементы, то есть энергетический поток внутри магнитного поля непосредственно преобразовывается в механическую энергию. Благодаря этому достигаются высокие показатели КПД и надежности агрегата;
Независимость силы тяги от сцепления колесных пар с рельсовыми путями. Это свойство недостижимо для стандартных агрегатов электрической тяги;
Отсутствие вероятности буксирования колес электрического транспорта, что стало причиной для выбора линейного двигателя;
Ускорение и скорость движения транспорта могут иметь любые значения, ограниченные комфортабельностью передвижения, допустимой скоростью качения колес по рельсовым путям и дорогам, а также степенью динамической устойчивости ходовой части транспортного средства и пути.
Линейные двигатели асинхронного типа необходимы для привода механизмов транспортировки различной продукции. Эти конвейеры оснащают металлическими лентами, проходящими внутри статоров линейных двигательных систем, выполняющими функцию вторичного элемента. Благодаря использованию линейной двигательной системы снижается степень предварительного натяжения ленты, устраняется вероятность ее проскальзывания, а также повышаются показатели скорости и надежности работы конвейера.
Линейные двигатели используют для машин ударного действия, к примеру, молоты для забивания свай, необходимые в сфере дорожных работ и строительстве. Статор линейной двигательной системы размещают на стреле молота, а его перемещение по направляющим элементам стрелы в вертикальном направлении обеспечивается благодаря лебедке. Ударная часть молота выполняет функцию вторичного элемента двигательной системы. Для осуществления подъема ударной части молота включение двигателя происходит так, что бегущее поле направляется вверх. При достижении ударным элементом крайнего верхнего положения происходит деактивация двигателя и происходит перемещение ударного элемента вниз на поверхность сваи под воздействием силы тяжести. Иногда деактивация двигателя не происходит – двигательная система работает в реверсивном режиме, увеличивая силу удара. В соответствии со степенью углубления сваи статор двигательной системы перемещается вниз благодаря лебедке. Конструкция электрического молота довольно проста. Его изготовить довольно просто. Повышенная точность в ходе производства его элементов не требуется, а его конструкция не чувствительна к изменениям температурных показателей, потому устройство может моментально приступить к выполнению своих функций.
Одним из видов линейных двигательных систем считаются магнитогидродинамические насосы. Эти устройства используют для перекачивания электропроводных жидкостей. Такие насосы широко используются: в металлургии для выполнения транспортировки, дозировки, а также перемещения металла в жидком виде и на АЭС для выполнения перекачки жидкометаллических теплоносителей.
Магнитогидродинамические насосы бывают двух видов: постоянного и переменного тока. В первом случае в роли первичного элемента (статора) выступает С-образный электромагнит. В воздушный зазор электрического магнита монтируют трубопровод с жидким металлом. Благодаря электродам, приваренным к стенкам трубопровода, пропускается постоянный ток от внешнего источника. В большинстве случаев обмотка возбуждения входит в последовательную цепь электродов. При возбуждении электрического магнита на металл, расположенный на участках, по которым проходит постоянный ток, оказывается воздействие электромагнитной силы, такой же, как сила, действующая на проводник с током, расположенным в зоне магнитного поля. В результате воздействия этой силы происходит перемещение металла по трубопроводу. Ключевые отличия МГД насосов заключаются в отсутствии движущихся механических элементов, а также в возможности герметизации канала транспортировки металла.
К преимуществам линейных двигательных систем стоит отнести отсутствие вращающихся элементов. К недостаткам стоит отнести низкие энергетические показатели, сравнительно со стандартными моделями электрических приводов, что объясняется разомкнутой электромагнитной цепью и существенными рабочими зазорами. Кроме того недостатками является сложность и высокая цена производства. Линейные двигательные системы используют для поездов, высокоскоростного наземного транспорта, относящегося к группе левитирующих транспортных средств. Общие показатели КПД стандартного агрегата и линейного электрического двигателя, в случае его оптимизации, практически равны, в случаях, когда исключаются промежуточные звенья передачи силы тяги. Со временем линейные электродвигатели вытеснят традиционные приводы с редукторами.
Список литературы:
- Гринченко В. А. Обоснование базовой конструкции линейного электродвигателя // Theoretical & Applied Science. - 2013. - Т. 1. - №11 (7). - С. 58-60.
- Гринченко В. А., Мишуков С. В. Расчет статической силы тяги линейного электродвигателя новой конструкции // Новые задачи технических наук и пути их решения. - Уфа: Аэтерна, 2014. - С. 18-20.
- Никитенко Г. В., Гринченко В. А. Линейный двигатель возвратно-поступательного движения с регулированием амплитуды колебаний якоря // Методы и технические средства повышения эффективности использования электрооборудования в промышленности и сельском хозяйстве. - Ставрополь: Агрус, 2009. - С. 407-410.
- Никитенко Г. В., Гринченко В. А. Результаты исследования линейного двигателя для вакуумного пульсатора доильного аппарата // Методы и технические средства повышения эффективности использования электрооборудования в промышленности и сельском хозяйстве. - Ставрополь: Агрус, 2010. - С. 268-272.
- Пат. 2357143 Российская Федерация, МПК8 F 16 К 31/06. Электромагнитный клапан / Никитенко Г. В., Гринченко В. А.; заявитель и патентообладатель Ставроп. гос. аграр. ун-т. - № 2007141983/06; заявл. 12.11.07; опубл. 27.05.09.
- Пат. 2370874 Российская Федерация, МПК8 H 02 K 33/12. Линейный двигатель / Никитенко Г. В., Гринченко В. А.; заявитель и патентообладатель Ставроп. гос. аграр. ун-т. - № 2008112342/09; заявл. 31.03.08; опубл. 20.10.09.
- Пат. 82990 Российская Федерация, МПК8 А 01 J 7/00. Регулятор вакуума / Никитенко Г. В., Гринченко В. А.; заявитель и патентообладатель Ставроп. гос. аграр. ун-т. - № 2008150545/22; заявл. 19.12.08; опубл. 20.05.09.
nauka-rastudent.ru
Применение линейных электрических двигателей
Линейный электродвигатель – электрическая машина, принцип работы которой построен на использовании энергии бегущего магнитного поля. Представление об устройстве такого двигателя можно получить, если мысленно разрезать статор и ротор с обмотками обычного двигателя вдоль оси по образующей и развернуть в плоскость. Образовавшаяся плоская конструкция представляет собой принципиальную схему линейного двигателя (рис. 1).
Рисунок 1 – Принципиальная схема линейного электродвигателя
Такие двигатели не требуют кинематических цепей для преобразования вращательного движения, что упрощает конструкцию привода и повышает его КПД. На сегодняшний день разработано множество разновидностей линейных двигателей, например, линейные асинхронные электродвигатели (ЛАД), линейные синхронные электродвигатели, линейные электромагнитные двигатели, линейные магнитоэлектрические двигатели.
Широкое применение линейные двигатели нашли в электрическом транспорте. Электротранспорт — вид транспорта, использующий в качестве источника энергии электричество, а в приводе применяется – линейный электродвигатель. Преимущества такого транспорта очевидны:
- во-первых, электротранспорт экологичен, т. к. у него полностью отсутствуют вредные выбросы в атмосферу;
- во-вторых, электротранспорт создает мало шума – за счет меньшего количества движимых частей и механических передач;
- в-третьих, электротранспорт обладает меньшей пожаро- и взрывоопасностью.
Помимо этого, такой вид транспорта очень выгоден с экономической точки зрения. Расходы на энергию у электротранспорта в 5,5 раз меньше чем у традиционного ДВС, а техническое обслуживание не требует затрат на замену масла, фильтров, свечей внутреннего сгорания.
Не менее важным является независимость силы тяги от силы сцепления колес с рельсовым путем, что невозможно для других систем электрической тяги. При использовании линейных двигателей ускорение и скорость движения могут быть очень большими и ограничиваться только максимально допустимой скоростью качения по рельсовому пути, динамической устойчивостью ходовой части транспорта.

Рисунок 2 – Схема применения линейного двигателя на рельсовом транспортном средстве
Одна из возможных схем применения линейного двигателя на рельсовом транспортном средстве показана на рис. 2. На тележке 3 укреплен линейный двигатель с двусторонним статором 1. Вторичным элементом является расположенная между рельсами полоса 2. С помощью скользящих контактов на статор подается напряжение, тем самым приводя конструкцию в движение.
Большое распространение получили устройства, где вторичным элементом является рельс и элементы несущей конструкции. Такие схемы характерны для монорельсовых пассажирских и грузовых дорог и механизмов передвижения кранов.

Рисунок 3 – Схема линейного двигателя монорельсовой дороги
На рис. 3 в качестве примера представлен линейный двигатель, сконструированный для монорельсовой дороги. Этот двигатель имеет двусторонний статор 1 с обмоткой 2, внутри которого находится вторичный элемент в виде полосы 3. Статор двигателя перемещается по полосе с помощью несущих роликов 5. Ролики 4 служат для взаимной фиксации статора и вторичного элемента в горизонтальном направлении.
Самой крупной и единственной в мире монорельсовой системой с линейным асинхронным двигателем является (ММТС). В данной системе были применены монорельсовые пути в виде двух стальных балок коробчатого типа, уложенных на железобетонные опоры высотой от 4 до 6 метров. Заземление монорельсовых путей выполнено с помощью заземляющих отводов, уложенных внутри монолитных элементов опор. Специально для этой системы инженерами ТЭМП был разработан ЛАД, позволяющий увеличить КПД и решить проблемы пробуксовки состава при обледенении ходовой балки. В составе ММТС находится 6 вагонов, приводимых в движение двумя линейными двигателями с тягой 750 кгс. На состав подается постоянное напряжение 600 В, а максимальная скорость – 60 км/ч.
Таким образом, применение линейных электродвигателей в электротранспорте является достаточно новым и перспективным направлением. А его экологичность и экономичность многократно превышает показатели любого другого вида транспорта, что немаловажно в условиях ограниченности ресурсов.
Список литературы:
1. Гринченко В. А. Обоснование базовой конструкции линейного электродвигателя // Theoretical & Applied Science. - 2013. - Т. 1. - №11 (7). - С. 58-60.
2. Гринченко В. А., Мишуков С. В. Расчет статической силы тяги линейного электродвигателя новой конструкции // Новые задачи технических наук и пути их решения. - Уфа: Аэтерна, 2014. - С. 18-20.
3. Никитенко Г. В., Гринченко В. А. Линейный двигатель возвратно-поступательного движения с регулированием амплитуды колебаний якоря // Методы и технические средства повышения эффективности использования электрооборудования в промышленности и сельском хозяйстве. - Ставрополь: Агрус, 2009. - С. 407-410.
4. Никитенко Г. В., Гринченко В. А. Результаты исследования линейного двигателя для вакуумного пульсатора доильного аппарата // Методы и технические средства повышения эффективности использования электрооборудования в промышленности и сельском хозяйстве. - Ставрополь: Агрус, 2010. - С. 268-272.
5. Никитенко Г. В., Гринченко В. А. Статика электромеханических процессов в линейном электродвигателе для привода пульсатора доильного аппарата // Методы и технические средства повышения эффективности использования электрооборудования в промышленности и сельском хозяйстве. - Ставрополь: Агрус, 2011. - С. 199-202.
6. Пат. 2357143 Российская Федерация, МПК8 F 16 К 31/06. Электромагнитный клапан / Никитенко Г. В., Гринченко В. А.; заявитель и патентообладатель Ставроп. гос. аграр. ун-т. - № 2007141983/06; заявл. 12.11.07; опубл. 27.05.09.
7. Пат. 2370874 Российская Федерация, МПК8 H 02 K 33/12. Линейный двигатель / Никитенко Г. В., Гринченко В. А.; заявитель и патентообладатель Ставроп. гос. аграр. ун-т. - № 2008112342/09; заявл. 31.03.08; опубл. 20.10.09.nauka-rastudent.ru