Чем отличается искусственный интеллект (ИИ) от робототехники? Роботы интеллектуальные
Чем отличается искусственный интеллект (ИИ) от робототехники?
Робототехника — часть ИИ илиИИ — часть робототехники? В чем разница между этими двумя терминами? Мы ответим на этот вопрос!
Робототехника и искусственный интеллект служат совсем разным целям. Однако люди часто путают их. Многие люди задаются вопросом, является ли робототехника подмножеством искусственного интеллекта или это одно и то же.
Первое, о чем следует сказать, — это то, что робототехника и искусственный интеллект — это совсем не то же самое. Фактически, эти двеобласти почти полностью разделены.
Диаграмма Венна из них будет выглядеть так:
Мы предполагаем, что люди путают эти два понятия из-за перекрытия между ними: искусственно интеллектуальные роботы.
Чтобы понять, как эти три термина связаны друг с другом, давайте посмотрим каждый из них индивидуально.
Что такое робототехника?
Робототехника — это отрасль технологии, которая занимается роботами. Роботы — это программируемые машины, которые обычно могут выполнять серию действий автономно или полуавтономно.
На наш взгляд, есть три важных фактора, которые определяют робота:
- Роботы взаимодействуют с физическим миром с помощью датчиков и исполнительных механизмов.
- Роботы программируются.
- Роботы обычно автономны или полуавтономны.
Существует много мнений о том, что представляет собой «робот». Некоторые эксперты говорят, что робот должен уметь «думать» и принимать решения. Однако стандартного определения «робототехнического мышления» нет. Требование робота «думать» предполагает, что у него есть определенный уровень искусственного интеллекта.
Робототехника включает в себя проектирование, создание и программирование физических роботов. Лишь небольшая его часть связана с искусственным интеллектом.
Что такое искусственный интеллект?
Искусственный интеллект (ИИ) — это отрасль информатики. Она включает разработку компьютерных программ для выполнения задач, которые требуют человеческий интеллект. Алгоритмы ИИ могут решать вопросы обучения, восприятия, решения проблем, понимания языка и / или логических рассуждений.
ИИ используется во многих отношениях в современном мире. Например, алгоритмы ИИ используются в поиске Google, в программе рекомендаций Amazon и в поисковых системах SatNav. Большинство программ ИИ не используются для управления роботами.
Даже когда ИИ используется для управления роботами, алгоритмы ИИ являются лишь частью более крупной роботизированной системы, которая также включает в себя датчики, исполнительные механизмы и программирование без ИИ.
Часто ИИ предполагает определенный уровень машинного обучения, когда алгоритм «обучен» реагировать определенным образом на определенный вход, используя известные входы и выходы.
Ключевым аспектом, который отличает ИИ от более обычного программирования, является слово «интеллект». Программы без ИИ просто выполняют определенную последовательность инструкций. Программы с ИИ имитируют некоторый уровень человеческого интеллекта.
Что такое искусственно интеллектуальные роботы?
Искусственно интеллектуальные роботы — это мост между робототехникой и искусственным интеллектом. Это роботы, которые контролируются программами ИИ. Многие роботы не используют ИИ. До недавнего времени все промышленные роботы были запрограммированы только для проведения повторяющихся серий движений. Как мы уже говорили, повторяющиеся движения не требуют искусственного интеллекта.
Неинтеллектуальные роботы довольно ограничены в своей функциональности. Алгоритмы ИИ часто необходимы, чтобы робот мог выполнять более сложные задачи.
Давайте посмотрим примеры.
Пример 1: Робот без ИИ
Например, вы можете легко запрограммировать робота, чтобы забрать объект и поместить его в другое место. Робот будет продолжать выбирать и размещать объекты одинаково, пока вы не отключите его. Это автономная функция, так как робот не требует человеческого вмешательства после того, как вы его запрограммировали. Однако задача не требует никакого интеллекта.
Пример 2: Искусственно интеллектуальный робот
Представьте, что вы хотели добавить камеру к вашему роботу. Взгляд робота подпадает под категорию «восприятия» и обычно требует алгоритмов ИИ.
Например, скажем, вы хотите, чтобы робот обнаружил объект, который он собирал, и поместил его в другое место в зависимости от типа объекта. Это предполагает подготовку специализированной программы видения для распознавания различных типов объектов.
neuronus.com
Интеллектуальные роботы (robotics)
Лекция 1. Введение
План:
1. История развития теории искусственного интеллекта методов и средств создания интеллектуальных систем управления техническими объектами и технологическими процессами.
1. Идея создания искусственного подобия человека зародилась еще в древности. Нужно было смоделировать человеческий разум. В древнем Египте была создана «оживающая» механическая статуя бога Амона. У Гомера в «Илиаде» бог Гефест создавал человеко-подобные существа-автоматы.
Однако родоначальником искусственного интеллекта считается средневековый испанский философ, математик и поэт Раймонд Луллий, который в XIII веке попытался создать механическую машину для решения различных задач. Он разработал всеобщую классификацию понятий.
В XVIII веке Лейбниц и Декарт независимо друг от друга продолжили эту идею. Они предложили универсальные языки классификации наук. Эти работы были первыми работами из области искусственного интеллекта.
Рождение искусственного интеллекта произошло после создания ЭВМ в 40-х годах XX века. В это же время Норберт Винер создал работы по новой науке - кибернетике.
Интеллектом будем называть способность мозга решать (интеллектуальные) задачи путем приобретения, запоминания и целенаправленного преобразования знаний в процессе обучения на опыте и адаптации к разнообразным обстоятельствам.
Термин «искусственный интеллект» - ИИ- (AI - artificial intelligence) был предложен в 1956 г. в Дартсмутском колледже (США). На семинаре рассматривались вопросы решения логических задач. Слово intelligence означает «умение рассуждать разумно», а вовсе не «интеллект», для которого есть термин intellect.
Искусственный интеллект стал отдельной областью науки. Искусственный интеллект разделился на два направления: нейрокибернетика и «кибернетика черного ящика». Эти направления развиваются независимо друг от друга.
Нейрокибернетика ориентирована на программно-аппаратное моделирование структур, подобных структуре мозга. Основой человеческого мозга является большое количество (до 1021) нейронов. Поэтому нейрокибернетики хотели создать элементы, похожие на нейроны, а объединив их - создать нейронные сети, или нейросетями.
В 1980-х годах в Японии был создан первый нейрокомпьютер - компьютер VI поколения. Ограничения по памяти и быстродействию были устранены. Появились транспьютеры - параллельные компьютеры с большим количеством процессоров.
Транспьютерная технология - это только один из десятка новых подходов к реализации нейросетей.
Основная область применения нейрокомпьютеров - это задачи распознавания образов, например распознавание объектов по результатам аэрофотосъемки из космоса.
Можно выделить 3 подхода к созданию нейросетей:
1. Аппаратный - создание специальных компьютеров, нейрочипов, плат расширения, наборов микросхем, реализующих все необходимые алгоритмы.
2. Программный - создание программ и инструментариев, рассчитанных на высокопроизводительные компьютеры. Сети создаются в памяти компьютера, всю работу выполняют его собственные процессоры.
3. Гибридный - комбинация первых двух. Часть вычислений выполняют специальные платы расширения (сопроцессоры), часть - программные средства.
От кибернетики «черного ящика» к ИИ.В основу этого подхода был положен принцип, противоположный нейрокибернетике.
Не имеет значения, как устроено «мыслящее» устройство. Главное, чтобы на заданные входные воздействия оно реагировало так же, как человеческий мозг.
Сторонники этого направления мотивировали свой подход тем, что человек не должен слепо следовать природе в своих научных и технологических поисках.
Например, очевиден успех колеса, которого не существует в природе, или самолета, не машущего крыльями как птица. Существенный вклад в становление новой науки внесли ее «пионеры»: Маккарти (автор первого языка программирования для задач ИИ - ЛИСПа), Минский (автор идеи фрейма и фреймовой модели представлений знаний), Ньюэлл, Саймон, Шоу, Хант и другие.
2Начиная с 50-х годов одной из популярных тем является компьютерная лингвистика - машинный перевод (МП).
Человек может перевести текст только на основе понимания его смысла. Постепенно системы машинного перевода усложнялись и в настоящее время используется несколько более сложных моделей:
* применение так называемых «языков-посредников» или языков смысла, в результате происходит дополнительная трансляция «исходный язык оригинала - язык смысла - язык перевода»;
* ассоциативный поиск аналогичных фрагментов текста и их переводов в специальных текстовых сочетаниях или базах данных;
* структурный подход, включающий анализ и синтез сообщений. Традиционно такой подход предполагает наличие нескольких этапов анализа:
1. Морфологический анализ - анализ слов в тексте.
2. Синтаксический анализ - разбор состава предложений и грамматических связей между словами.
3. Семантический анализ - анализ смысла составных частей каждого предложения на основе некоторой базы знаний.
4. Прагматический анализ - анализ смысла предложений на основе собственной базы знаний.
Синтез ЕЯ (естественно-языковых) сообщений включает аналогичные этапы, но несколько в другом порядке.
Интеллектуальные роботы (robotics)
Идея создания роботов не нова. Слово «робот» появилось в 20-х годах (от чешского «робота» - тяжелая грязная работа).
Роботы - это электротехнические устройства, предназначенные для автоматизации человеческого труда.
Можно условно выделить несколько поколений в истории создания и развития робототехники:
I поколение.Роботы с жесткой схемой управления. Практически все современные промышленные роботы принадлежат к первому поколению. Это программируемые манипуляторы.
II поколение.Адаптивные роботы с сенсорными устройствами. Есть образцы таких роботов, но в промышленности они пока используются мало.
III поколение.Самоорганизующиеся или интеллектуальные роботы. Это - конечная цель развития робототехники. Основные нерешенные проблемы при создании интеллектуальных роботов - проблема машинного зрения и адекватного хранения и обработки трехмерной визуальной информации.
Основная литература: 1
Дополнительная литература:
Контрольные вопросы для самоподготовки
1. Понятие интеллекта.
2. Понятие искусственного интеллекта.
3. История искусственного интеллекта: зарождение нейрокибернетики.
4. История искусственного интеллекта в России.
Лекция 2. Введение
План:
1. Разработка естественно-языковых интерфейсов и машинный перевод.
2. Проблемы теории и практики.
1. Достижения в области нейрофизиологии, микроэлектроники, информационной технологии, теории и техники обработки информации и управления привели к возможности создания нового поколения систем - интеллектуальных. В основу концепции таких систем положена теория функциональной системы, описывающая системную приспособительную реакцию живого организма.
В 1935 г. П.К.Анохин применил разработанный им системный подход к изучению и пониманию функций живого организма, опираясь на предложенную им же оригинальную теорию функциональной системы. Используя тончайшие методы аналитического исследования нервной системы, П.К.Анохин находит место любому микрофизиологическому процессу в архитектуре целостной приспособительной реакции организма. В этой работе функциональная система впервые была определена как замкнутое физиологическое образование с наличием обратной информационной связи о результатах действия. Каждая функциональная система, обеспечивающая тот или иной приспособительный эффект, имеет многочисленные каналы, по которым информация с периферии достигает соответствующих нервных центров. Полезный приспособительный эффект является определяющим в любой функциональной системе, поскольку способствует достижению цели, которая выступает в том числе как системообразующий фактор. Отличительная черта любого, даже самого маленького результата, способствующего достижению цели, - то, что он непременно получается на основе принципа саморегуляции и независимо от уровня и сложности обладает одними и теми же узловыми механизмами, такими, как афферентный синтез цели; принятие решения к действию; эфферентная программа действия; акцептор действия, предсказывающий параметры результата; обратная афферентация о параметрах результата и, наконец, сличение параметров полученного результата с параметрами, предсказанными или прогнозированными акцептором действия.
Структурная схема функциональной системы приведена на рис. 1.
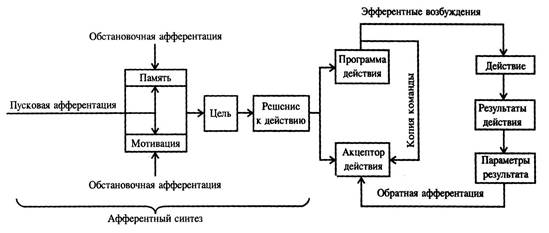
Рис. 1 Структурная схема функциональной системы
В реализации поведенческого акта, если действия достигают результата, параметры которого соответствуют свойствам акцептора действия, приспособительный акт заканчивается. В противном случае за счет ориентировочной реакции перестраивается афферентный синтез, реорганизуется программа действия и таким образом, действие происходит до тех пор, пока результаты не будут соответствовать ранее сформированным параметрам акцептора действия.
Появление микропроцессоров высокой производительности и с большой емкостью памяти, возможность организации мультитранспьютерных сетей для реализации параллельных вычислений, с одной стороны, и необходимость обработки значительных массивов информации, применения базы знаний для формирования целенаправленной деятельности - с другой, привели к созданию интеллектуальных систем. Под интеллектуальной системой будем понимать объединенную информационным процессом совокупность технических средств и программного обеспечения, работающую во взаимосвязи с человеком (коллективом людей) или автономно, способную на основе сведений и знаний при наличии мотивации синтезировать цель, вырабатывать решение о действии и находить рациональные способы достижения цели. Рассмотрим структуру интеллектуальной системы (рис.2).
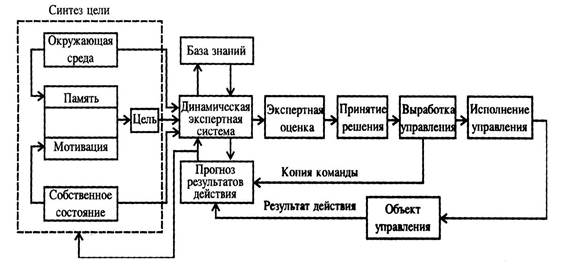
Рис. 2 Структура интеллектуальной системы
Проблемы теории и практики.Решение задачи синтеза цели требует разработки методов и средств получения информации об окружающей среде и эффективной идентификации собственного состояния, как объекта управления, так и самой системы. При формировании цели возникает проблема достаточности базы знаний, а следовательно, и памяти, возможности их реализации как на содержательном, так и на конструктивном уровне. Динамическая экспертная система выполняет расчет, оптимизацию, прогноз и моделирование результатов, поэтому должна обладать высоким быстродействием.
Цель в интеллектуальных системах выступает и как цель, и как системообразующий фактор, обеспечивающий взаимодействие отдельных элементов системы таким образом, чтобы достигалась цель. При этом результаты действия сравниваются с прогнозируемыми, т.е. имеет место обратная связь. В традиционном смысле здесь мы соприкасаемся с проблемами структурного синтеза систем, обеспечения устойчивого функционирования за счет выбора рационального управления. В значительной мере для построения моделей интеллектуальных систем могут быть использованы элементы теории управления, теории информационных процессов. При наличии трех составляющих: цели, окружающей среды и внутреннего состояния - для построения моделей интеллектуальных систем может быть развита теория интеллектуального управления.
План
1.Дифференциально-модельная концепция базы знаний для интеллектуальных систем. Дифференциальная макрофизика
2. Процедура построения дифференциальных моделей.
1.Дифференциально-модельная концепция базы знаний для интеллектуальных систем. Дифференциальная макрофизика
Дифференциальные модели повсеместно и привычно используются в современной науке и технике для представления динамических систем. Естественен интерес к построению и применению этих моделей при разработке и создании перспективных интеллектуальных систем автоматизированного проектирования, управления и обучения. Целью настоящей работы является изложение тех далеко идущих фундаментальных результатов в области систематики базы макрофизических знаний, которые проистекают из исследования проблемы алгоритмизации построения дифференциальных моделей.
Дифференциальную макрофизику образуют: механика (линейная и угловая), гидравлика (для жидкостей и газов), электрика (включая электромеханику) и термодинамика. К сожалению, упомянутая и подчеркнутая дифференциально-модельная концепция в познании является единственным, что эти науки объединяет. Все остальное - традиции, терминология, переменные, законы природы, принципы и т.д. - специфично для каждой из них и не способствует восприятию дифференциальной макрофизики как единого систематизированного и интегрированного целого. В каждой науке занимаются одним и тем же - познают физическую сущность, т.е. строят дифференциальные модели, но своим узкоспециализированным путем. Это многоязычие физиков не смущает. Они считают свою задачу выполненной. А многочисленная армия не физиков, занимающаяся построением и применением дифференциальных моделей, вынужденно мирится с возникающими непростыми междисциплинарными трудностями. Особенно остро это проявляется при обучении студентов, прежде всего, в областях автоматизированного проектирования, управления и технической кибернетики.
Таким образом, интересующая нас проблема алгоритмизации построения дифференциальных моделей до некоторой степени оказывается на «ничейной» междисциплинарной полосе. И один из путей ее решения - внимательный анализ базы макрофизических знаний с позиций дифференциально-модельной концепции, единственно общей для всех макрофизических наук. Прежде всего, обратимся к единой процедуре построения дифференциальных моделей, включающей следующие этапы:
1) выбор учитываемых в модели физических эффектов и соответствующего им перечня используемых законов природы;
2) определение физического смысла причинных и следственных переменных;
3) причинно-следственная интерпретация в используемых законах природы;
4) применение принципа композиции;
5) построение искомой дифференциальной модели с учетом причинно-следственной интерпретации законов природы.
Специфика каждой макрофизической науки проявляется во всех четырех этапах. Однако внимательный анализ используемых в различных науках принципов композиции (четвертый этап) приводит к однозначному выводу о целесообразности признания принципа Лагранжа-Релея в качестве универсального для дифференциальной макрофизики в целом. Это закономерное следствие из уже доказанной его применимости для линейной и угловой механик (Ж. Лагранж), для электрики и электромеханики (Дж. Максвелл).
Исследование принятой структуры записи принципа композиции Лагранжа-Релея приводит к получению важной информации по второму и третьему этапам означенной выше процедуры. Во-первых, принцип подразумевает необходимость использования четырех типов переменных, причинных координаты  и скорости
и скорости  , следственных координаты
, следственных координаты  и скорости
и скорости  .
.
Во-вторых, принцип представляет собой уравнение баланса внешней (входной)  и внутренних
и внутренних  причинных скоростей:
причинных скоростей:  , где K определяется количеством учитываемых в дифференциальной модели физических эффектов. Задание физического смысла , т.е. вида идеального ее источника, дает возможность определить физический смысл остальных переменных с учетом того, что произведение причинной и следственной скоростей всегда есть мощность
, где K определяется количеством учитываемых в дифференциальной модели физических эффектов. Задание физического смысла , т.е. вида идеального ее источника, дает возможность определить физический смысл остальных переменных с учетом того, что произведение причинной и следственной скоростей всегда есть мощность  .
.
Классы экспертных систем
Дифференциальная макрофизика - наука о познании физических сущностей материальных объектов и систем.
По степени сложности решаемых задач экспертные системы классифицируют по следующим признакам:
1) По способу формирования решения системы разделяют на 2 класса: аналитические и синтетические. Аналитические предполагают выбор решения из множества известных альтернатив. Синтетические предполагают генерацию решений (формирование объекта).
2) По способу учета временного признака: статические и динамические. Статические решают задачи при неизменяемых в процессе решения знаниях. Динамические допускают такие изменения. Статические системы допускают монотонное решение задачи от ввода исходных данных до конечного результата. Динамические предусматривают возможность пересмотра в процессе решения полученных ранее результатов.
3) По видам используемых данных и знаний: системы с детерминированными (четко определенными) знаниями и неопределенными знаниями. Под неопределенностью знаний понимается их неполнота или отсутствие, двусмысленность, нечеткость.
4) По числу используемых источников знаний: с использованием одного источника и множества; альтернативные и дополняющие друг друга.
| Анализ | Синтез | ||
| Детерминированная | Классифицирующие | Трансформирующие | Один источник знаний |
| Неопределенность | Доопределяющие | Многоагентные | Множество источников знаний |
| Статика | Динамика |
2.Процедура построения дифференциальных моделей.
Дифференциальные модели повсеместно и привычно используются в современной науке и технике для представления динамических систем. Естественен интерес к построению и применению этих моделей при разработке и создании перспективных интеллектуальных систем автоматизированного проектирования, управления и обучения.
Дифференциальные модели позволяют решать все задачи с помощью интегральных моделей, и, кроме того, с помощью вариационных методов при определенных критериях устанавливать и изменять режим бурения в течение рейса, т.е. находить Р р1 ( t), со 2 ( t), Q г ( 0 - Примером дифференциальных моделей может служить модель ЕМ.
Дифференциальные модели могут использоваться как в том случае, когда сигналы и отклики измеряются в некоторые, фиксированные моменты времени, так и при непрерывном измерении входных и выходных сигналов. В рамках этих моделей отклики всегда случайны, тогда как переменные состояния и управляющие сигналы могут быть и детерминированными и случайными. Параметры модели, подлежащие оцениванию, могут содержаться в самом дифференциальном уравнении, в начальных условиях, а также в уравнениях модели наблюдений.
Дифференциальные модели повсеместно и привычно используются в современной науке и технике для представления динамических систем. Естественен интерес к построению и применению этих моделей при разработке и создании перспективных интеллектуальных систем автоматизированного проектирования, управления и обучения.
Преимуществом дифференциальных моделей вида является то, что искомые параметры входят в них линейно.
Рассмотрим одну из дифференциальных моделей, которая встречается в теории эпидемий. Предположим, что некая популяция, состоящая из N особей, подразделяется на три группы. В первую из них включаются особи, которые восприимчивы к некоторой конкретно имеющейся в виду болезни, по здоровы. Во вторую группу объединяются особи, которые являются инфекционными - они сами больны и являются источником распространения болезни. Наконец, третья группа - это особи, которые здоровы и обладают иммунитетом к данной болезни.
Современные методы исследования, проектирования и создания сложных объектов и систем неразрывно связаны с разработкой, реализацией на ЭВМ и исследованием их моделей различных видов. Исследование динамических свойств и характеристик таких объектов часто проводится на их моделях в форме систем обыкновенных дифференциальных уравнений (ОДУ) в общем случае нелинейных и жестких. Для получения решений (траекторий) данные неалгоритмические математические (непрерывные) модели преобразуются в алгоритмические или машинные (дискретные) модели с применением какого-либо численного метода интегрирования (дискретизации) ОДУ. Hедостаточно корректное применение того или иного метода дискретизации и выбора шага h дискретности (интегрирования) может привести к неадекватности алгоритмической и математической моделей.
План
1. Динамические экспертные системы и базы знаний. Структурная схема динамической экспертной системы (ДЭС).
2. Концептуальное знание. Фактуальное, предметное знание. Алгоритмическое, процедурное знание. Структура ДЭС первого, второго и третьего типов и решаемые ими задачи.
План
1. Применение нейронных сетей. Парадигмы нейросетевой технологии.
2. Свойство нейронных сетей: обучение, обобщение, абстрагирование. Нейронные сети и другие виды программного обеспечения. Архитектура сети
Модели нейронных сетей
Разработчики теории – Маккалон и Питтс.
Главные результаты нейронных сетей сводились к следующему:
1. Модель нейрона в виде простейшего процессорного элемента, который вычисляет значение некоторой функции.
2. Конструкция нейронной сети для выполнения логических и арифметических операций.
3. Высказывалось предположение, что нейронная сеть способна обучаться, распознавать образы и обобщать полученную информацию.
Фрэнк Разенблатт (1958 г.) ввел понятие перцептрона – модели нейронных сетей.
Разенблатт ввел возможность модификации межнейронных связей. Это сделало нейронную сеть обучаемой.
Многослойные сети.
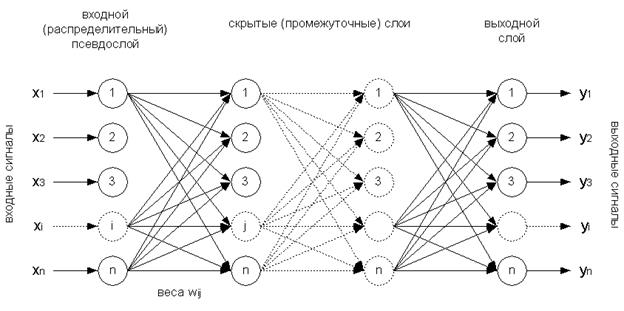
Рисунок 6 - Схема многослойного персептрона
Две архитектуры
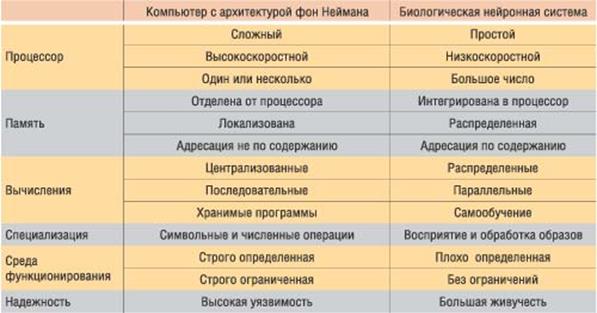
Еще на заре компьютерной эры были намечены два принципиально разных подхода к обработке информации: последовательная обработка символов и параллельное распознавание образов. И символы и образы — это «слова», которые обрабатывают компьютеры, а основное различие между ними заключается лишь в размерности. При этом размер образа может быть на много порядков больше размера символа. Казалось бы, разница не очень значительна и приводит лишь к несколько большему времени обработки длинных слов, но на самом деле различия в размерах данных имеют принципиальное значение, так как сложность работы с образами возрастает нелинейно при увеличении их разрядности.
Если для относительно коротких символов можно описать все возможные над ними операции и создать процессор, который предсказуемым образом обрабатывает все входящие символы, исполняющие роль команд или данных, то реализовать то же самое для образов невозможно, поскольку подобное описание будет расти экспоненциально. А значит, любой процессор, предназначенный для обработки образов, содержит лишь часть возможных входных образцов и соответствующих им действий и должен «додумывать» свое поведение и обобщать известные ему примеры, чтобы его реакция была аналогичной и приемлемой с точки зрения решения задачи, для которой он предназначен. Таким образом, различие между последовательными и параллельными вычислениями заключается в принципиально разных методах постановки и решения задач, связанных с обработкой информации.
Преимущества нейросетевого подхода заключаются в следующем:
• параллелизм обработки информации;
• единый и эффективный принцип обучения;
• надежность функционирования;
• способность решать неформализованные задачи.
Биологическая эволюция, которая привела к столь эффективным решениям, шла по пути от образов к логике. Так и человек после рождения сначала учится распознавать образы, а только потом приобретает умение рассуждать логически и строить алгоритмы. Компьютеры же, напротив, начав с логики, лишь спустя несколько десятилетий осваивают распознавание образов за счет создания специальных программ для компьютеров традиционной архитектуры или благодаря созданию специализированных аппаратных нейропроцессоров.
План
- Лингвистические переменные и их использование. Функции принадлежности.
- Нечеткие множества. Операции над нечеткими множествами. Основные операции нечеткой логики. Основная структура и принцип работы системы нечеткой логики.
1. Одним из ключевых понятий нечеткой логики является понятие лингвистической переменной. Суть данного понятия состоит в том, что конкретные значения числовой переменной х обычно подвергаются субъективной оценке человеком, причем результат такой оценки выражается на естественном языке.
Так, переменная “Рост (высота) человека” может характеризоваться одним из следующих термов (terms), т.е. сжатых словесных описаний: “маленький”, “невысокий”, “среднего роста”, “высокий”. Другая переменная – “Скорость движения автомобиля” – может быть “малой”, “средней”, “большой” и т.д. Каждый из приведенных здесь термов может рассматриваться как символ некоторого нечеткого подмножества в составе полного множества значений х. Переменные, значениями которых являются термы (слова, фразы, предложения), выраженные на естественном языке, называют лингвистическими переменными (linguistic variables).
Задать нечеткое подмножество , соответствующее определенному i-му терму (значению) лингвистической переменной, – это значит задать область определения числовой переменной х и функцию принадлежности элемента х подмножеству.
Пример 1. Рассмотрим лингвистическую переменную “Яркость” изображения. Будем полагать, что различные значения физической переменной х яркости (единица измерения кд/м2) могут быть охарактеризованы набором из 5 нечетких подмножеств (значений лингвистической переменной):
{“Очень темно”, “Темно”, “Средне”, “Светло”, “Очень светло”}.
При описании объектов и явлений с помощью нечетких множеств используется понятие нечеткой и лингвистической переменных.
Нечеткая переменная характеризуется тройкой <a, X, A>, где
- a - имя переменной,
- X - универсальное множество (область определения a),
- A - нечеткое множество на X, описывающее ограничение (то есть m A(x)) на значение нечеткой переменной a.
Лингвистической переменной называется набор <b ,T,X,G,M>, где
- b - имя лингвистической переменной;
- Т - множество его значений (терм-множество), представляющие имена нечетких переменных, областью определения, которых является множество X. Множество T называется базовым терм-множеством лингвистической переменной;
- G - синтаксическая процедура, позволяющая оперировать элементами терм-множества T, в частности, генерировать новые термы (значения). Множество TИG(T), где G(T) - множество сгенерированных термов, называется расширенным терм-множеством лингвистической переменной;
- М - семантическая процедура, позволяющая преобразовать новое значение лингвистической переменной, образованной процедурой G, в нечеткую переменную, то есть сформировать соответствующее нечеткое множество.
Во избежание большого количества символов:
- символ b используют как для названия самой переменной, так и для всех его значений;
- для обозначения нечеткого множества и его названия пользуются одним символом, например, терм "молодой", является значением лингвистической переменной b = "возраст", и одновременно нечетким множеством М ("молодой").
Присваивание нескольких значений символам предполагает, что контекст допускает неопределенности.
Пример
Пусть эксперт определяет толщину изделия, с помощью понятия "маленькая толщина", "средняя толщина" и "большая толщина", при этом минимальная толщина равняется 10 мм, а максимальная - 80 мм.
Формализация этого описания может быть проведена с помощью лингвистической переменной <b, T, X, G, M>, где
- b - толщина изделия;
- T - {"маленькая толщина", "средняя толщина", "большая толщина"};
- X - [10, 80];
- G - процедура образования новых термов с помощью связок "и", "или" и модификаторов типа "очень", "не", "слегка" и др. Например, "маленькая или средняя толщина", "очень маленькая толщина" и др.;
- М - процедура задания на X = [10, 80] нечетких подмножеств А1="маленькая толщина", А2 = "средняя толщина", А3="большая толщина", а также нечетких множеств для термов из G(T) соответственно правилам трансляции нечетких связок и модификаторов "и", "или", "не", "очень", "слегка", операции над нечеткими множествами вида: А З C, АИ C,
 , CON А = А2 , DIL А = А0,5 і ін.
, CON А = А2 , DIL А = А0,5 і ін.
Вместе с рассмотренными выше базовыми значениями лингвистической переменной "толщина" (Т={"маленькая толщина", "средняя толщина", "большая толщина"}) существуют значения, зависящие от области определения Х. В данном случае значения лингвистической переменной "толщина изделия" могут быть определены как "около 20 мм", "около 50 мм", "около 70 мм", то есть в виде нечетких чисел.
Функции принадлежности нечетких множеств:
"маленькая толщина" = А1 , "средняя толщина"= А2, " большая толщина"= А3.
Функция принадлежности:
нечеткое множество "маленькая или средняя толщина" = А1ИА1.
Применение нечетких систем
Что касается отечественного рынка коммерческих систем на основе нечеткой логики, то его формирование началось в середине 1995 года. Популярными являются следующие пакеты:
· CubiCalc 2.0 RTC - одна из мощных коммерческих экспертных систем на основе нечеткой логики, позволяющая создавать собственные прикладные экспертные системы ;
· CubiQuick - дешевая "университетская" версия пакета CubiCalc ;
· RuleMaker - программа автоматического извлечения нечетких правил из входных данных ;
· FuziCalc - электронная таблица с нечеткими полями, позволяющая делать быстрые оценки при неточных данных без накопления погрешности;
· OWL - пакет, содержащий исходные тексты всех известных видов нейронных сетей, нечеткой ассоциативной памяти и т.д.
Основная и дополнительная литература: [8]-[9]
Контрольные вопросы для самоподготовки
- Понятие лингвистической переменной.
- Использование лингвистической переменной.
- Функции принадлежности.
- Нечеткие множества.
- Операции над нечеткими множествами.
- Основные операции нечеткой логики.
- Основная структура и принцип работы системы нечеткой логики.
План
1.База правил нечеткой логики. Блок вывода. Нечеткий вывод на основе правила композиции.
2.Нечеткие выводы по: Мамдани, Ларсени, Цукамото. Дефазицикация. Примеры использования нечетких алгоритмов в управлении
Математический аппарат
Характеристикой нечеткого множества выступает функция принадлежности (Membership Function). Обозначим через MFc(x) – степень принадлежности к нечеткому множеству C, представляющей собой обобщение понятия характеристической функции обычного множества. Тогда нечетким множеством С называется множество упорядоченных пар вида C={MFc(x)/x}, MFc(x) [0,1]. Значение MFc(x)=0 означает отсутствие принадлежности к множеству, 1 – полную принадлежность.
Проиллюстрируем это на простом примере. Формализуем неточное определение "горячий чай". В качестве x (область рассуждений) будет выступать шкала температуры в градусах Цельсия. Очевидно, что она будет изменяется от 0 до 100 градусов. Нечеткое множество для понятия "горячий чай" может выглядеть следующим образом:
C={0/0; 0/10; 0/20; 0,15/30; 0,30/40; 0,60/50; 0,80/60; 0,90/70; 1/80; 1/90; 1/100}.
Так, чай с температурой 60 С принадлежит к множеству "Горячий" со степенью принадлежности 0,80. Для одного человека чай при температуре 60 С может оказаться горячим, для другого – не слишком горячим. Именно в этом и проявляется нечеткость задания соответствующего множества.
Для описания нечетких множеств вводятся понятия нечеткой и лингвистической переменных.
Нечеткая переменная описывается набором (N,X,A), где N – это название переменной, X – универсальное множество (область рассуждений), A – нечеткое множество на X. Значениями лингвистической переменной могут быть нечеткие переменные, т.е. лингвистическая переменная находится на более высоком уровне, чем нечеткая переменная. Каждая лингвистическая переменная состоит из:
- названия;
- множества своих значений, которое также называется базовым терм-множеством T. Элементы базового терм-множества представляют собой названия нечетких переменных;
- универсального множества X;
- синтаксического правила G, по которому генерируются новые термы с применением слов естественного или формального языка;
- семантического правила P, которое каждому значению лингвистической переменной ставит в соответствие нечеткое подмножество множества X.
Алгоритмы нечеткого вывода различаются главным образом видом используемых правил, логических операций и разновидностью метода дефазификации. Разработаны модели нечеткого вывода Мамдани, Сугено, Ларсена, Цукамото.
Нечеткие нейронные сети
Нечеткие нейронные сети (fuzzy-neural networks) осуществляют выводы на основе аппарата нечеткой логики, однако параметры функций принадлежности настраиваются с использованием алгоритмов обучения НС. Поэтому для подбора параметров таких сетей применим метод обратного распространения ошибки, изначально предложенный для обучения многослойного персептрона. Для этого модуль нечеткого управления представляется в форме многослойной сети. Нечеткая нейронная сеть как правило состоит из четырех слоев: слоя фазификации входных переменных, слоя агрегирования значений активации условия, слоя агрегирования нечетких правил и выходного слоя.
Наибольшее распространение в настоящее время получили архитектуры нечеткой НС вида ANFIS и TSK. Доказано, что такие сети являются универсальными аппроксиматорами.
Быстрые алгоритмы обучения и интерпретируемость накопленных знаний – эти факторы сделали сегодня нечеткие нейронные сети одним из самых перспективных и эффективных инструментов мягких вычислений.
Адаптивные нечеткие системы
Классические нечеткие системы обладают тем недостатком, что для формулирования правил и функций принадлежности необходимо привлекать экспертов той или иной предметной области, что не всегда удается обеспечить. Адаптивные нечеткие системы (adaptive fuzzy systems) решают эту проблему. В таких системах подбор параметров нечеткой системы производится в процессе обучения на экспериментальных данных.
План
1. Задачи баз знаний в интеллектуальных системах (ИС).
2. Продукционная модель представления знаний. Логические модели. Сетевые модели или семантические сети. Фреймовые модели.
Читайте также:
lektsia.com
Архитектура интеллектуальных роботов — КиберПедия
Введение
Эволюция представлений о путях развития робототехники, ее целях и задачах весьма схожа с тем, что наблюдается с такой областью, как искусственный интеллект. Декларируемые общие принципы и, как казалось, понимание путей достижения некой глобальной цели исследования сменилось узкой специализацией, множеством частных, зачастую не связанных между собою подцелей и направлений.
Объясняется это тем, что поставленные изначально задачи оказались значительно более сложными, требующими создания совершенно иных моделей, методов и технологий, и прежде всего – технологий искусственного интеллекта.
Технологии искусственного интеллекта (ИИ) всегда были тесно связаны с робототехникой. Не случайно одним из направлений ИИ до сих пор считается целенаправленное поведение роботов (создание интеллектуальных роботов, способных автономно совершать операции по достижению целей, поставленных человеком) [Поспелов, 1988].
Робот – это технический комплекс, предназначенный для выполнения различных движений и некоторых интеллектуальных функций человека и обладающий необходимыми для этого исполнительными устройствами, управляющими и информационными системами, а также средствами решения вычислительно-логических задач [Попов и др., 1990].
В настоящее время различают 3 поколения роботов:
· Программные. Жестко заданная программа (циклограмма).
· Адаптивные. Возможность автоматически перепрограммироваться (адаптироваться) в зависимости от обстановки. Изначально задаются лишь основы программы действий.
· Интеллектуальные. Задание вводится в общей форме, а сам робот обладает возможностью принимать решения или планировать свои действия в распознаваемой им неопределенной или сложной обстановке.
Интеллектуальные роботы
Общепринято мнение, что интеллектуальный робот обладает т.н. моделью внешнего мира или внутренней средой, что позволяет роботу действовать в условиях неопределенности информации ([Попов и др., 1976]). В том случае, если эта модель реализована в виде базы знаний, то целесообразно, чтобы эта база знаний была динамической. При этом коррекция правил вывода в условиях меняющейся внешней среды естественным образом реализует механизмы самообучения и адаптации.
Если отойти от подобного «перечислительно-функционального» определения ИР, то останется лишь два более или менее конструктивных определения. Первое заключается в том, что интеллектуальный робот – это робот, в состав которого входит интеллектуальная система управления. Тогда достаточно только выбрать определение интеллектуальной системы (ИС). Например, определить ИС как компьютерную систему для решения задач, которые или не могут быть решены человеком в реальное время, или же их решение требует автоматизированной поддержки, или же их решение дает результаты сопоставимые по информативности с решениями человека ([Финн, 2004a], [Финн, 2004b]).
Кроме того, среди прочего подразумевается, что задачи, решаемые ИС не предполагают полноты знаний, а сама ИС должна обладать способностями: к упорядочению данных и знаний с выделением существенных параметров; к обучению на основе позитивных и негативных примеров, к адаптации в соответствии с изменением множества фактов и знаний и т.д. ([Финн, 2004b])
Другим, менее формальным, определением интеллектуальности робота может быть способность системы решать задачи, сформулированные в общем виде. Это определение является, не смотря на свою «слабость», достаточно конструктивным по крайней мере для того, чтобы определить «степень интеллектуальности» робота.
Итак, несмотря на множество предлагаемых критериев интеллектуальности, самым сильным остается по-прежнему требование, согласно которому роль человека при взаимодействии с ИР должна свестись лишь к постановке задачи.
Заключение
На сегодняшний день интеллектуальные роботы вышли из области чисто научных разработок и становятся такими же необходимыми элементами повседневной жизни, как телевидение и сотовая связь.
Однако, чтобы вызвать полноценный бум, необходимо преодолеть некоторые ключевые проблемы. Остаются задачи коммуникации и координации. Требует проработки и механизм захвата.
И все же способности роботов быстро развиваются. Согласно исследованиям, 1.5-кг мозг человека может выполнять около 100 трлн операций в секунду — почти втрое больше, чем самый мощный в мире компьютер Earth Simulator. Развиваясь по закону Мура, машины могут достичь такой обрабатывающей мощности. Однако, чтобы быть достаточно полезным, роботу не нужны все возможности человеческого мозга. Умственных способностей рыбки гуппи примерно в 1000 млн операций в секунду вполне достаточно, чтобы мобильные бытовые роботы могли уверенно ориентироваться в незнакомом окружении. Даже лишенные человеческого разума, роботы-андроиды займут часть рынка. Sony, Honda и некоторые другие японские компании предлагают роботов-компаньонов.
О масштабах происходящих перемен дают данные об объемах продаж. По подсчетам экспертов, объем рынка "бытовых роботов" в Японии в прошлом году составил 390 млрд. иен ($3,2 млрд.), а к 2025 году достигнет годового объема в 8 трлн. иен ($70 млрд.).
В этом году рынок персональных и мобильных роботов должен вырасти до 5,4 млрд долл. и стать крупнее рынка промышленных стационарных роботов, утверждает Дэн Кара, президент фирмы Robotics Trends, которая организует конференции и пропагандирует отрасль. К 2010 году, по словам Кара, эта цифра приблизится к 17 млрд долл. Пусть некоторые считают эти оценки слишком оптимистичными, но у Кара есть наглядные свидетельства наступления лихорадки роботизации. В прошлом году выставка Robodex в Японии собрала около 68 тыс. посетителей, да и объемы продаж Roomba и da Vinci говорят сами за себя.
Сегодня мы живем в стремительно изменяющемся мире, неотъемлемой частью которого будут роботы, обладающие искусственным интеллектом. Мы не можем остановить эти изменения, но в наших силах направить их для улучшения жизни человека.
Список литературы
[Макаров и др., 2003]Макаров И.М., Топчиев Ю.И. Робототехника: история и перспективы.-М.: Наука, Издательство МАИ, 2003.
[Мобильные роботы]Фестиваль "Мобильные роботы" в МГУ. http:// www.robot.ru
[Охоцимский и др., 2000] Охоцимский Д.Е., Павловский В.Е., Плахов А.Г., Туганов А.Н.. Моделирование игры роботов-футболистов и базовые алгоритмы управления ими. // Искусственный интеллект, N 3, 2000.
[Поспелов, 1988] Поспелов Г.С. Искусственный интеллект - основа новой информационной технологии. -М.:Наука, 1988.
[Попов и др., 1976] Попов Э.В., Фридман Г.Р. Алгоритмические основы интеллектуальных роботов и искусственного интеллекта, М: Наука, 1976.
[Попов и др., 1990]Попов Е.П., Письменный Г.В. Основы робототехники: Введение в специальность. М.:Высш.шк., 1990.
[Финн, 2004a] Финн В.К. Искусственный интеллект: Идейная база и основной продукт, 9-я национальная конференция по искусственному интеллекту, Труды конференции, Т.1, М., Физматлит, 2004.
[Финн, 2004b] Финн В.К. Об интеллектуальном анализе данных //Новости искусственного интеллекта №3, 2004.
[DARPA]DARPA official materials. http://www.darpa.mil
[Fira]FIRA official materials. http:// www.fira.net
[IGVC]IGVC official materials. http://www.igvc.org
[RoboCup] RoboCup Federation. Official materials. http:// www.robocup.org
Интеллектуальные роботы будущего
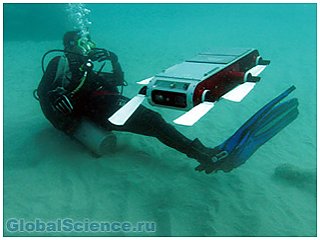
Отправляемые в космос роботы, погрузившись, например, в ледяной океан Юпитера и Сатурна, должны принимать решения о том, что делать дальше. Ведь, чтобы получить информацию с Земли, даже, когда подразумевается скорость света, потребуется несколько часов.
Поэтому, понятно, что для робота-исследователя важно, насколько он умен. От этого зависит, сможет ли он избежать, подстерегающие опасности. Вопросы эти волнуют ученых. Занимался ими и ученый из штата Массачусетс Йогеш Гердхар, работающий в институте Океанографии в Вудс-Холе. Он, в своей докторской диссертации, усовершенствовал интеллект подводного робота Aqua, которые очень схожи с космическими, поскольку трудности заставляют их так же принимать важные решения.
Находящийся на своего рода границе Марс не позволяет ученым напрямую управлять роботами, которые проводят исследования. Очень сложно передавать данные, когда они находятся за пределами доступных расстояний. Потоковое HD- видео невозможно получать по многим причинам в режиме времени реального, что касается и воды. Хотя там отсутствует радиация, из-за повышенной солености, «общение» с роботами также затруднены. Все, что имеется для таких случаев у специалистов это модем акустический с низкой пропускающей способностью. Поэтому с Марса данные получить быстрее, чем от находящегося под водой робота.
Гердхар
Решением является обучение робота, который должен самостоятельно научиться определять необычные объекты и все, что имеет важное действительно значение. На Земле типичный подводный робот способен выполнить простейшие задачи: перемещаться по маршрутам, заданным заранее, делая по пути сотни тысяч фотографий. Идея состоит в создании интеллекта искусственного, который поможет роботу в моделировании любого предмета, попавшегося на глаза, и определении чему он соответствует. Например, встречая под водой камни и песок, подводный робот должен уметь создать базу, связанную с подобным типом местности.
Тогда, например, увидев рифы коралловые, он их идентифицирует и понятно, определит как «важные». Запрограммировав робота таким образом, чтобы для него приоритетными были необычные предметы, можно сократить время, затрачиваемое на исследование привычных объектов и на посылку снимков на Землю. Робот, без подготовки сможет сам делать открытия на совершенно неизведанных планетах, не располагая изначально никакими сведениями о ней.
Введение
Эволюция представлений о путях развития робототехники, ее целях и задачах весьма схожа с тем, что наблюдается с такой областью, как искусственный интеллект. Декларируемые общие принципы и, как казалось, понимание путей достижения некой глобальной цели исследования сменилось узкой специализацией, множеством частных, зачастую не связанных между собою подцелей и направлений.
Объясняется это тем, что поставленные изначально задачи оказались значительно более сложными, требующими создания совершенно иных моделей, методов и технологий, и прежде всего – технологий искусственного интеллекта.
Технологии искусственного интеллекта (ИИ) всегда были тесно связаны с робототехникой. Не случайно одним из направлений ИИ до сих пор считается целенаправленное поведение роботов (создание интеллектуальных роботов, способных автономно совершать операции по достижению целей, поставленных человеком) [Поспелов, 1988].
Робот – это технический комплекс, предназначенный для выполнения различных движений и некоторых интеллектуальных функций человека и обладающий необходимыми для этого исполнительными устройствами, управляющими и информационными системами, а также средствами решения вычислительно-логических задач [Попов и др., 1990].
В настоящее время различают 3 поколения роботов:
· Программные. Жестко заданная программа (циклограмма).
· Адаптивные. Возможность автоматически перепрограммироваться (адаптироваться) в зависимости от обстановки. Изначально задаются лишь основы программы действий.
· Интеллектуальные. Задание вводится в общей форме, а сам робот обладает возможностью принимать решения или планировать свои действия в распознаваемой им неопределенной или сложной обстановке.
Интеллектуальные роботы
Общепринято мнение, что интеллектуальный робот обладает т.н. моделью внешнего мира или внутренней средой, что позволяет роботу действовать в условиях неопределенности информации ([Попов и др., 1976]). В том случае, если эта модель реализована в виде базы знаний, то целесообразно, чтобы эта база знаний была динамической. При этом коррекция правил вывода в условиях меняющейся внешней среды естественным образом реализует механизмы самообучения и адаптации.
Если отойти от подобного «перечислительно-функционального» определения ИР, то останется лишь два более или менее конструктивных определения. Первое заключается в том, что интеллектуальный робот – это робот, в состав которого входит интеллектуальная система управления. Тогда достаточно только выбрать определение интеллектуальной системы (ИС). Например, определить ИС как компьютерную систему для решения задач, которые или не могут быть решены человеком в реальное время, или же их решение требует автоматизированной поддержки, или же их решение дает результаты сопоставимые по информативности с решениями человека ([Финн, 2004a], [Финн, 2004b]).
Кроме того, среди прочего подразумевается, что задачи, решаемые ИС не предполагают полноты знаний, а сама ИС должна обладать способностями: к упорядочению данных и знаний с выделением существенных параметров; к обучению на основе позитивных и негативных примеров, к адаптации в соответствии с изменением множества фактов и знаний и т.д. ([Финн, 2004b])
Другим, менее формальным, определением интеллектуальности робота может быть способность системы решать задачи, сформулированные в общем виде. Это определение является, не смотря на свою «слабость», достаточно конструктивным по крайней мере для того, чтобы определить «степень интеллектуальности» робота.
Итак, несмотря на множество предлагаемых критериев интеллектуальности, самым сильным остается по-прежнему требование, согласно которому роль человека при взаимодействии с ИР должна свестись лишь к постановке задачи.
Архитектура интеллектуальных роботов
На сегодняшний день считается, что в состав интеллектуального робота должны входить:
Исполнительные органы – это манипуляторы, ходовая часть и др. устройства, с помощью которых робот может воздействовать на окружающие его предметы. Причем по своей структуре это сложные технические устройства, имеющие в своем составе сервоприводы, мехатронные части, датчики, системы управления. По аналогии с живыми организмами это руки и ноги робота.
Датчики – это системы технического зрения, слуха, осязания, датчики расстояний, локаторы и др. устройства, которые позволяют получить информацию из окружающего мира.
Система управления – это мозг робота, который должен принимать информацию от датчиков и управлять исполнительными органами. Эта часть робота обычно реализуется программными средствами. В состав системы управления интеллектуального робота должны входить следующие компоненты:
Модель мира – отражает состояние окружающего робот мира в терминах, удобных для хранения и обработки. Модель мира выполняет функцию запоминания состояния объектов в мире и их свойств.
Система распознавания – сюда входят системы распознавания изображений, распознавания речи и т.п. Задачей системы распознавания является идентификация, т.е. «узнавание» окружающих робот предметов, их положения в пространстве. В результате работы компонентов системы распознавания строится модель мира.
Система планирования действий – осуществляет «виртуальное» преобразование модели мира с целью получения какого-нибудь действия. При этом обычно проверяется достижимость поставленной цели. Результатом работы планирования действий является построение планов, т.е. последовательностей элементарных действий.
Система выполнения действий – пытается выполнить запланированные действия, подавая команды на исполнительные устройства и контролируя при этом процесс выполнения. Если выполнение элементарного действия оказывается невозможным, то весь процесс прерывается и должно быть выполнено новое (или частично новое) планирование.
Система управления целями – определяет иерархию, т.е. значимость и порядок достижения поставленных целей.
Важными свойствами системы управления является способность к обучению и адаптации, т.е. способность генерировать последовательности действий для поставленной цели, а также подстраивать свое поведение под изменяющиеся условия окружающей среды для достижения поставленных целей.
cyberpedia.su
Интеллектуальный робот - Большая Энциклопедия Нефти и Газа, статья, страница 1
Интеллектуальный робот
Cтраница 1
Интеллектуальный робот, способный понимать окружающую обстановку и принимать решение. [1]
Поэтому интеллектуальный робот для сборки гальванических матриц должен, во-первых, выбрать все движения от ящика до матрицы, а во-вторых, из всех возможных движений выбрать те, которые обеспечивают минимальную стоимость. Приставки из экстремального регулятора и микропроцессора оценки состояния позволяют обычный робот довести до интеллектуального. Задача состоит в том, чтобы робот по своим степеням подвижности и допустимой рабочей зоне обеспечивал реализацию программ. [2]
Разработка интеллектуальных роботов не снимает актуальности задачи восприятия. Дополненные специальными датчиками телевизионного или микрофонного типа роботы приобретают дополнительные свойства. Это обстоятельство отодвигает роботы во второе поколение. Однако интеллектуальные задачи шире и глубже, и они могут решаться без специальных осязательных средств. [3]
Прирост интеллектуальных роботов составляет 25 - 30 % в год. [4]
Создание интеллектуальных роботов составляет конечную цель робототехники. В настоящее время в основном используются программируемые манипуляторы с жесткой схемой управления, названные роботами первого поколения. [5]
Для интеллектуальных роботов были разработаны системы общения. Программа, понимающая естественный язык. [6]
Создание интеллектуальных роботов составляет конечную цель робототехники. В настоящее время в основном используются программируемые манипуляторы с жесткой схемой управления, названные роботами первого поколения. [7]
В интеллектуальном роботе на программы и устройства отработки возлагаются большие задачи. Во-первых, необходимо обеспечить оптимальное движение по заданным начальным условиям. Во-вторых, необходимо обеспечить точный вывод схвата по конечному состоянию. [8]
Отличительной чертой интеллектуальных роботов является их способность к обучению на опыте и адаптации в процессе решения задач. Что же касается самого умения решать интеллектуальные задачи, то оно является производным в том смысле, что существенно зависит от того, как протекал процесс обучения и адаптации робота. [9]
В настоящее время интеллектуальные роботы реализованы пока что в виде математических и лабораторных моделей, обладающих элементами искусственного интеллекта. [10]
В будущем большинство интеллектуальных роботов будет снабжено органами зрения для решения разнообразных технических задач. [11]
Для ГПС необходимы также интеллектуальные роботы. Эти подвижные звенья, владеющие последними достижениями в области искусственного интеллекта, не просто связывают один станок с другим. В условиях частых перестроек производства на новую продукцию роботы должны хранить в своей памяти необходимую сумму знаний о своей профессии. Следовательно, нужно уметь проверять знания роботов, контролировать их способности. [12]
Естественным продолжением компонент АПМП является интеллектуальный робот, который наряду с роботами других поколений является перспективой ближайшего будущего. [13]
Робототехнические системы, особенно с адаптивными и интеллектуальными роботами, нуждаются в микропроцессорном управлении. Здесь речь идет о распределенном, а не централизованном управлении. Преимущественное предпочтение отдается БФН. Когда в алгоритмах встречаются необходимые операции с матрицами, то самым удобным языком встроенного программирования оказывается язык с последовательной логикой диапрограмм перехода состояний. [14]
В технической реализации считаем, что интеллектуальный робот будет иметь встроенный микропроцессор. [15]
Страницы: 1 2 3 4
www.ngpedia.ru
Робототехника, искусственный интеллект и интеллектуальные права
Из всех предоставленных на олимпиаде тем для меня самой интересной и актуальной оказалась «Робототехника, искусственный интеллект и интеллектуальная собственность». Возможно, это произошло под влиянием множества научно-фантастических фильмов. Основной идеей этих фильмов является восстание машин и, как следствие, истребление человечества. У кого-то такие фильмы вызывают панику, кто-то относится к этому с иронией или вообще равнодушно. Я же задумалась, можно ли найти решение проблемы? Вероятно, мы сможем предотвратить подобные восстания, если уже сейчас поднимем вопрос о защите прав Искусственного Интеллекта.
Робототехника, искусственный интеллект стремительно вошли в наш мир. Мы можем встретить умных роботов не только в научных лабораториях, на производстве, технических выставках, но и в школах, супермаркетах, отелях и больницах. Ученые считают, что активное внедрение подобных инноваций в нашу действительность повлечет за собой изменения в различных сферах нашей жизни. Мною сделана попытка осмыслить некоторые юридические аспекты данной проблемы.
Прежде всего, определимся, что для нас означают понятия «робот», «искусственный интеллект» (ИИ) и «интеллектуальная собственность» (ИС). Международная федерация робототехники (International Federation of Robotics, IFR) утверждает: «робот — это рабочий механизм, программируемый по нескольким осям с некоторой степенью автономности и способный передвигаться в пределах определенной среды, выполняя поставленные задачи» [8, с.8]. Роботы — это полностью автономные устройства, способные самостоятельно принимать решения и выполнять некоторые задачи без помощи человека, в непредсказуемых ситуациях. Также роботами могут считаться некоторые дистанционно управляемые и полуавтономные устройства (экзоскелеты, дроны, беспилотники, хирургические роботы, автомобильные и промышленные роботы).
Перейдем к более обширному понятию — «искусственный интеллект». По одному из определений Российской ассоциации искусственного интеллекта, ИИ — это свойство интеллектуальных систем выполнять функции (творческие), которые традиционно считаются прерогативой человека. При этом интеллектуальная система — это техническая или программная система, способная решать задачи, традиционно считающиеся творческими, принадлежащие конкретной предметной области, знания о которой хранятся в памяти такой системы. Структура интеллектуальной системы включает три основных блока: базу знаний, решатель и интеллектуальный интерфейс, позволяющий вести общение с ЭВМ без специальных программ для ввода данных [1].
Понятие интеллектуальной собственности можно найти в ст.1225 ГК РФ. Согласно указанной норме, оно включает в себя охраняемый законом результат интеллектуальной деятельности или приравненные к нему средства индивидуализации.
На данный момент охраняемыми объектами в сфере робототехники в основном являются различные устройства и системы, конструктивные и технические особенности, материалы и технологии, конструкторские решения (объекты патентного права), исходный код и программное обеспечение, дизайн, как всего робота, так и его отдельных узлов и деталей (объекты авторского права), фирменные названия роботов, товарные знаки (средства индивидуализации). Также многие разработчики и производители для защиты своих инноваций от конкурентов прибегают к производственным секретам, ноу-хау (нетрадиционные объекты), так как патентование требует значительных временных и финансовых затрат, особенно если разработчики не являются большой корпорацией. Таким образом, можно заметить, что охраняется то, что касается собственно создания роботов, но, возможно, в ближайшем будущем объекты охраны в этой сфере могут претерпеть некоторые изменения.
Основные дискуссии в настоящее время идут вокруг совместного правообладания, авторства на сгенерированный контент. Решается вопрос о том, кто является автором объекта ИС, например, исходного кода мобильного приложения или технического перевода, созданного при помощи программных инструментов: разработчик алгоритма и принципов работы искусственного интеллекта или его пользователь? Можно ли считать обоих соавторами?
Сейчас, как правило, права на ИИ-алгоритмы принадлежат заказчикам таких систем. Именно крупные корпорации, а не создатели ИИ получают прибыль и владеют правами. Однако, власти Японии, например, собираются изменить ситуацию и распространить законы об авторском праве на самих разработчиков систем искусственного интеллекта. Будет учитываться эксклюзивность и уникальность данных, использованных в разработках и ИИ-технологий, а также степень участия различных компаний в создании ИИ и предоставлении данных для обучения алгоритма [10].
Американские исследователи считают, что права авторства не всегда закрепляются за тем, кто фактически создавал объект, и что, в эпоху цифровых технологий не обязательно следовать концепции естественного права автора на созданное им произведение, которую еще в XVII веке провозгласил Джон Локк [3,с.55].
Современные тенденции в развитии индустрии робототехники выводят на повестку дня новые вопросы, в частности о праве собственности на произведения и изобретения, созданные роботами самостоятельно. И, возможно, уже в ближайшее время будет создан прецедент, когда право собственности на результат интеллектуальной деятельности (РИД) будет отдано самой машине.
Еще совсем недавно считалось, что машина лишена воображения, она воспроизводит лишь те образы, которые заложены в нее человеком, поэтому создать что-либо кардинально новое она не может. Прогрессивные технологии вносят коррективы, приближая будущее, о котором говорили писатели-фантасты. В частности, Айзек Азимов еще в 1976 году в научно-фантастической повести «Двухсотлетний человек» (англ. The Bicentennial Man) рассказал о роботе, у которого обнаружились творческие способности. Его хозяин не только создал условия для реализации этого таланта, обеспечил ему возможность продавать результаты своей интеллектуальной деятельности, но и разделил полученную роботом прибыль в соотношении 50/50.
Прошло 40 лет, и мы уже в режиме реального времени можем видеть устройства, которые при выполнении поставленных задач находят новые решения проблем, создают материальные и нематериальные продукты. Сейчас это в основном творческие произведения: изображения, мелодии, тексты, переводы. В мире уже существует музыкальная группа Compressorhead, состоящая из музыкантов-роботов и играющая в стиле хэви-металл. Конструируются приборы, например, немецкая Sound Machine, которые могут создавать достаточно приятные мелодии, а также исполнять их в прямом режиме. Множество разработок ведется в области визуального искусства. Одна из самых известных, проект AARON — робот, пишущий картины, созданный Гарольдом Коэном, профессором Калифорнийского университета в Сан-Диего [2]. Уже несколько лет существует конкурс, организованный Эндрю Конру (Andrew Conru), основателем FriendFinder Networks, в котором принимают участие разработчики роботов, способных к творчеству. Участники конкурса Robot Art могут предоставить произведение искусства или видео процесса создания его роботом и выиграть денежное вознаграждение [5].
В результате прогресса в технологиях распознавания естественного языка машины уже заменяют журналистов в некоторых жанрах. Лучше всего ИИ справляется с подготовкой аналитических текстовых материалов в тематиках вроде финансов и спорта, где важную роль играют числа. Компании Narrative Science и Automated Insights внушают журналистам страх, разрабатывая умные генераторы текстов для Forbes, Associated Press, Yahoo News и других всемирно известных изданий.
Специалисты Google в рамках проекта Magenta, попытаются развить креативные возможности машин в сфере музыки и визуального искусства. В основе проекта богатые наработки подразделения Google Brain team, которое занимается вопросами машинного интеллекта. Благодаря инженерам и программистам этой компании, ИИ научился разрабатывать свой собственный метод шифрования.
Роботы не только учатся создавать произведения, которые необходимо охранять в рамках авторского права, но и активно вторгаются на территорию патентного права — начинают изобретать.
Стивен Талер, глава американской компании Imagination Engines Inc. утверждает, что именно компьютерная программа, названная «Творческой машиной» (Creativity Machine), является изобретателем зубной щётки Oral-B CrossAction с щетинками, расположенными под углом [7]. Машину Талера некоторые называют «Томасом Эдисоном в коробке». Так считает, например, Расти Миллер (Rusty Miller), правительственный подрядчик компании General Dynamics: «Свой первый патент он получил на устройство для автономной генерации полезной информации. Её официальное название —«Творческая машина». Второй патент был получен на самообучающийся объект нейронной сети (Self-Training Artificial Neural Network Objects — STANNO). Вдумайтесь: патент номер два был изобретен патентом номер один!»
Но согласно современному законодательству робот не может быть полноценным автором, несмотря на то что иные художественные, музыкальные, текстовые произведения или программы порой невозможно отличить от результата интеллектуальной деятельности человека. Хотя в некоторых странах, в частности в Японии и Корее, уже всерьез рассматривается возможность наделить машины правами. Действительно, в законодательствах об авторском праве разных стран имеются существенные различия в подходах к решению вопросов в сфере робототехники. Например, законы Великобритании вообще позволяют избежать использования авторского права в отношении созданных роботами произведений. Законодательства Новой Зеландии и Австралии предусматривает охрану оригинальных произведений авторским правом независимо от того, созданы ли они человеком, программами, роботами или системами искусственного интеллекта. Однако права на такие произведения принадлежат не самим искусственным системам, а их создателям либо пользователям. [8, с.25]
Некоторые исследователи убеждены в том, что такой подход безнадёжно устарел. Не так давно был опубликован доклад под названием “Когда искусственный интеллект превзойдет человека в производительности? Данные экспертов” [9]. Более 352 исследователей в сфере высокоуровневого машинного интеллекта из 43 стран приняли участие в опросе. Они предсказывают, что уже в следующем десятилетии искусственный интеллект превзойдет людей во многих видах деятельности. Мнения экспертов разделились, однако общие тенденции им выделить удалось:
– к 2024 году — ИИ лучше справится с переводом с одного языка на другой;
– к 2026 году — написанием эссе по программе средней школы;
– к 2049 году — написанием бестселлеров.
С мнением экспертов согласен и участник международной конференции «Интеллектуальная собственность в новом технологическом укладе», которая прошла 1–2 февраля 2018 года в технопарке «Сколково» профессор Райан Эбботт из Университета Суррея (Великобритания). Он считает, что компьютеры в ближайшем будущем смогут сами выступать в качестве изобретателей, и уверен, что уже примерно через 25 лет уровень искусственного интеллекта сравняется с человеческим, что может изменить всю модель патентования [4]. На взгляд профессора, отсутствие современного механизма регистрации и охраны подобной интеллектуальной собственности может тормозить развитие в этой сфере и сдерживать потенциал машин. Он отмечает, что из-за невозможности должным образом закрепить за ИИ авторство использовать такие изобретения в коммерческих целях, привлекать инвесторов для дальнейшего развития будет проблематично. Более того, в такой обстановке идеи и проекты, разработанные искусственным интеллектом, могут вовсе скрываться из опасений, что кто-то может их украсть. «Вскоре компьютеры будут постоянно что-то изобретать, и, возможно, в будущем именно машинам мы будем обязаны большинством инноваций», — считает Эбботт. И признание того факта, что права на изобретения могут принадлежать ИИ, на взгляд профессора, активизирует развитие «креативных» компьютеров и подарит человечеству множество перспективных идей [6].
Я уверена, что новое поколение исследователей и специалистов в области интеллектуальной собственности и инноваций сможет разрешить существующие на данном этапе развития технологий и права противоречия. Со мной согласны многие мои сверстники. По результатам опроса, в котором участвовали ученики 7–11 классов ФГБОУ «Средняя школа-интернат МИД России» (74 чел.), 43 % респондентов готовы признать за роботами право на интеллектуальную собственность. Следует отметить, что практически треть из них (28 %) считают, что именно они должны стать полноправными авторами своих РИД. 62 % — говорят о совместном правообладании разработчика, владельца и самого ИИ, причем в равных долях. Остальные высказали мысль о том, что созданные роботом произведения, изобретения и другие РИД должны стать общественным достоянием и быть доступными для свободного пользования во благо всего человечества.
Таким образом, можно сделать вывод, что достаточно размытая и неурегулированная тема защиты прав искусственного интеллекта, в настоящее время является объектом серьезного осмысления и обсуждения. Пока нельзя точно сказать, что ожидает нашу цивилизацию в перспективе. Важно то, что уже сейчас необходимо определить круг вопросов, которые нам предстоит решить в ближайшем будущем, чтобы быть уверенными, что мы можем в полной мере воспользоваться преимуществами и минимизировать негативные последствия развития прорывных технологий.
Литература:
- Аверкин А. Н., Гаазе-Рапопорт М. Г., Поспелов Д. А. Толковый словарь по искусственному интеллекту. — М.:Радио и связь, 1992. — 256 с.
- Алгоритмы творчества: может ли компьютер создать произведение искусства? // URL: http://gagadget.com/science/22701-algoritmyi-tvorchestva-mozhet-li-kompyuter-sozdat-proizvedenie-iskusstva/ (Дата обращения: 27.06.2016).
- Ахмедов Г. А., Войниканис Е. А., Глазунова К. Д. и др. Основные тенденции развития права интеллектуальной собственности в современном мире, в том числе новые объекты интеллектуальных прав и глобальная защита // Научно-практическое пособие. — М.: РВК, 2017. — 213 с.
- Интеллектуальная собственность уходит в блокчейн // URL: https://www.kp.ru/daily/26792.4/3826047/ (Дата обращения: 07.02.2018).
- Невероятные произведения искусства, созданные роботами // URL: https://geektimes.ru/company/robohunter/blog/271006/ (Дата обращения: 12.02.2016).
- Патентные права и ИИ: могут ли машины считаться авторами изобретений? // URL: https://3dnews.ru/942152 (Дата обращения: 06.11.2016).
- Программа Creativity Machine выдумывает, изобретает и совершает открытия // URL: http://www.membrana.ru/particle/1713 (Дата обращения: 26.01.2004).
- Робототехника: прорывные технологии, инновации, интеллектуальная собственность Кайснер Э., Раффо Д., Вунш-Винсент С. // Форсайт,
- Изд-во:Национальный исследовательский университет «Высшая школа экономики» (Москва), 2016. Т. 10. № 2. С. 7–27.
- Через 45 лет искусственный интеллект полностью превзойдет человека // URL: http://robotoved.ru/british_report_robotics/ (Дата обращения: 05.06.2017).
- Японцы хотят изменить закон об интеллектуальной собственности для искусственного интеллекта // URL: https://www.copyright.ru/news/business/2017/12/31/Japan/ (Дата обращения: 31.12.2017).
yun.moluch.ru
Робот АСИМО, или Прорыв в создании искусственного интеллекта
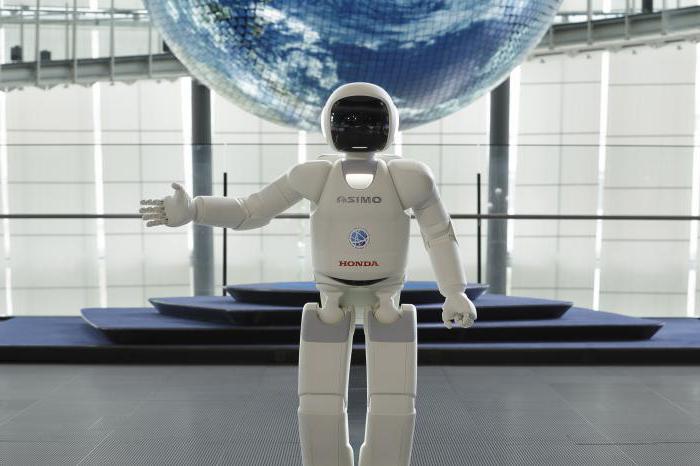
И снова Япония впереди планеты всей в плане развития новейших технологий. В 2000 году вниманию общественности был представлен робот АСИМО – андроид, умеющий самостоятельно передвигаться, различать лица людей и работать в сети. В 2009 г. желающие могли приобрести это достояние науки в личное пользование, то есть взять в аренду. Статья расскажет подробнее о новом друге человека.
Как все начиналось?
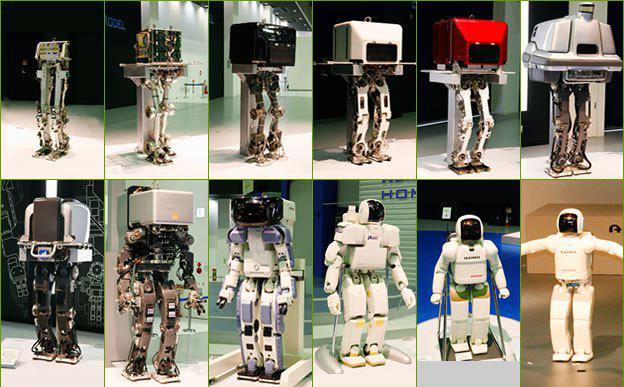
Впервые идея по созданию человекоподобного робота пришла к разработчикам японской компании «Хонда». Робот АСИМО создавался в качестве помощника для человека, и первый прототип современного АСИМО появился в 80-х годах прошлого века. После того как компания «Хонда» отлично зарекомендовала себя на автомобильном рынке и заняла лидирующие позиции, она обратила внимание на еще никем не тронутую область деятельности – создание человекообразного робота-андроида, который передвигался бы на двух ногах.
Основной замысел был не в том, чтобы создать простую машину, а в том, чтобы воспроизвести механизм, способный мыслить, исполнять простые действия и помогать людям.

История создания
Ученые предположили, что для нормального взаимодействия с человеком робот должен уметь не только самостоятельно двигаться по ровной поверхности, но также пользоваться лестницей и не терять устойчивости в более обширном диапазоне условий. Поэтому его форма и является человекоподобной, что помогает безупречно владеть технологией ходьбы.
20 лет назад создание такого робота было сложной и трудоемкой задачей, но компании «Хонда» удалось с ней справиться. В 1986 г. была представлена первая модель робота АСИМО. Он умел ходить, правда, только по ровной поверхности и достаточно медленно (1 шаг с остановкой на 5 секунд). Чтобы улучшить скорость, учеными была специально разработана технология «динамического хождения». И в декабре 2004 года случился инновационный прорыв в компании «Хонда» – робот «АСИМО» (фото которого можно увидеть в статье) начал бегать. Уже в 2011 году обновленная версия робота была оснащена первой в мире технологией автономного контроля поведения.
Технические характеристики
Если сравнивать особенности робота АСИМО 2000 года и последней модели, то невозможно не заметить разительный прорыв. В 2000 году был представленный образец весом в 52 килограмма. Его высота составляла 120 см, а ширина – 45 см. Он ходил со скоростью 1,6 км/ч., не умел бегать. Работал от никель-гидридной батареи около 30 минут. Степеней свободы, то есть совокупности независимых траекторий перемещений, было 26.
Последняя модель имеет значительные различия. Ее вес стал меньше на 2 килограмма, в то время как рост увеличился на 10 сантиметров. Скорость ходьбы стала составлять почти 3 км (2,7 км)/ч. Робот 2014 года умеет бегать, развивая при этом скорость 7 км/ч. Имеет 57 степеней свободы и может более часа работать без подзарядки.
Функциональность
Робот АСИМО обладает широким спектром разнообразных функций:
- Распознавание объектов. Благодаря встроенной видеокамере робот может следить за движущимися объектами, что его окружают.
- Понимает жесты. Последняя модель верно истолковывает жестикуляцию. Может пожимать руку в знак приветствия или прощаться.
- Распознает окружение. Робот двигается безопасно для себя и окружающих. Он понимает, что такое ступенька, и не упадет с нее, также без усилий обойдет человека, который остановился у него на пути.
- Работает со звуками. В голову и тело робота встроено 8 микрофонов, соединенных с системой HARK. Она может распознавать звуки с точностью 80%. Более того, АСИМО способен распознавать три потока речи, то есть понимать, о чем говорят три человека одновременно (кстати, такая способность не каждому человеку доступна). Робот без труда определяет, откуда пришел звук, различает голоса, отделяя человеческую речь от других источников шума. Еще робот отзывается на свое имя, поворачивает голову к собеседнику, а также реагирует на звуки, несущие тревогу или опасность.
- Распознавание внешности. Помимо всего прочего, робот может узнавать знакомые лица. Сейчас он способен распознать около 15 лиц, но как только он узнает человека, сразу обращается к нему по имени.
Коммерческий вопрос
Японский робот АСИМО может подключаться к локальной сети. Он способен сообщать хозяину о посетителях и провожать их непосредственно к нему. Однако такого незаменимого помощника пока что нельзя приобрести. На период 2009 года существовало всего 100 роботов. Стоимость производства каждого АСИМО составляет около 1 миллиона долларов.
Каждый робот – это кропотливая ручная работа, и пока компания «Хонда» не ставит перед собой цель массово производить андроиды на рынок. Зато такого красавца можно взять в аренду. Стоимость 30-дневного пользования составляет 14 тысяч долларов.

Лучший помощник
На сегодняшний день АСИМО способен переносить и подавать вещи, толкать тележку в супермаркете, подавать напитки (в частности, может самостоятельно заварить чай) и открывать дверь. Робот отлично сбалансирован, поэтому не стоит беспокоиться о том, что он что-то разольет или побьет, не донеся до места назначения. Световые индикаторы, вмонтированные в «грудь», всегда будут напоминать о том, в каком состоянии находится помощник и сколько он еще может работать. Управление роботом производится через портативный контроллер.
В компании «Хонда» определяют интеллект как возможность совершать определенные действия путем сбора и анализа информации. Отталкиваясь от этого понятия, и был создан искусственный интеллект робота АСИМО (фото представлены в статье). Усовершенствованные интеллектуальные и физические возможности человекоподобного андроида поражают. И хотя для создания самостоятельно функционирующего искусственного интеллекта с множеством функций понадобится еще не одно десятилетие, Япония уже совершила первые шаги в этой области исследований.
fb.ru
Презентация на тему: Интеллектуальные роботы (robotics)
Робототехника ХХ века характеризуется выдающимися практическими достижениями.
Советские луноходы покорили Луну. 17 ноября 1970 года Луноход-1(аппарат 8ЕЛ, вес 756 кг, длина с открытой крышкой солнечной батареи 4,42 м, ширина 2,15 м, высота 1,92 м) съехал с посадочной ступени на лунный грунт в Море Дождей). Он стал пятым подвижным образованием на Луне после Армстронга, Олдрина, Конрада и Бина.Луноход-1активно функционировал 301 сутки 06 час 37 мин, прошел расстояние 10 540 м, обследовал площадь в 80 000 м2, с помощью телесистем передал свыше 20 000 снимков поверхности и более 200 панорам, более чем в 500 точках поверхности определилфизико-механическиесвойства поверхностного слоя лунного грунта, а в 25 точках провел его химический анализ.
Интеллектуальные роботы (robotics)
Луноход-2в составе станцииЕ-8№ 204(Eyna-21)был запущен 8 января 1973 года. Последнее сообщение ТАСС о движении аппарата было датировано 9 мая. Говорилось, что луноход начал движение от разлома Прямой на восток к мысу Дальний. Судя по всему, в этот день было пройдено лишь 800 м. Там луноход и остался. Погубил его кратер.Луноход-2смог превысить отпущенные ему ресурсом три месяца.
Интеллектуальные роботы (robotics)
I поколение. Роботы с жесткой схемой управления.
Практически все современные промышленные роботы принадлежат к первому поколению. Фактически это программируемые манипуляторы.
II поколение. Адаптивные роботы с сенсорными устройствами.Есть образцы таких роботов, но в промышленности они пока используются мало.
III поколение. Самоорганизующиеся или интеллектуальные роботы.Это — конечная цель развития робототехники. Основные нерешенные проблемы при создании интеллектуальных роботов — проблема машинного зрения и адекватного хранения и обработки трехмерной визуальной информации.
В настоящее время в мире изготавливается более 60 000 роботов в год.
Актуальность создания интеллектуальных мобильных роботов
Автономные интеллектуальные мобильные роботы предназначены для автоматической работы в заранее неопределенных условиях внешней среды. Они могут применяться в различных областях человеческой деятельности и могут решать различные задачи. Например, доставлять грузы, перемещать различные предметы, производить разведку, производить какую-либотехнологическую операцию на большом пространстве (например, уборку помещения) и т.п.
Подобные системы готовы заменить человека при выполнении сложных технологических операциях, связанных с повышенным риском или с работой в экстремальных средах, например, в условиях повышенной радиации, давлении или безвоздушном пространстве, а также заменить человеческий труд на непопулярных профессиях.
Робот-вертолетMantis (2003 г.)
Австралийские инженеры из организации CSIRO разработали роботвертолёт Mantis ("Богомол"), который способен к автономному полёту — впервые — без использования системы глобального позиционирования (GPS).
Высота "Богомола" 0,5 метра, а длина 1,5 метра. При этом новый вертолёт в 4-5раз легче, чем любой другой беспилотный летательный аппарат, и стоит значительно дешевле.
Хотя роботом можно управлять дистанционно, в полёте машина может полагаться исключительно на свой компьютерный мозг и видеокамеры-глаза.Специально для вертолёта разработана система инерционного восприятий (Inertial Sensing System) с микроэлектромеханическими датчиками, сделанными из лёгкого сплава магния.
Роботы-солдатыTalon,SWORDS (2004 г.)
Солдаты с дистанционным управлением появились на свет в результате совместных действий армии США и маленькой компании из Массачусетса под названием Foster-Miller.
Эта фирма была в ноябре прошлого года куплена QinetiQ Group PLC, которая, в свою очередь, принадлежит министерству обороны Великобритании (MOD) и американскому холдингу Carlyle Group.
Всё началось с роботов, именуемых "Когтями" (TALON). Они находятся на военной службе с 2000 года, побывали в Боснии, Афганистане и том же Ираке, работали своими механическими руками на развалинах ВТЦ после терактов 11 сентября.
Роботы-солдатыTalon,SWORDS (2004 г.)
Их задачами были: обнаружение и обезвреживание взрывчатки вместе с наблюдением за неприятием. И военные качеством выполнения этих задач были довольны. Однако через некоторое время армейские чиновники и сотрудники Foster-Miller,по их же словам, получили известие от солдат. Дескать, нравятся нам "Когти", спору нет, но давайте дадим им хотькакое-нибудьоружие.
Идя навстречу пожеланиям военнослужащих, инженеры из армейского арсенала в Нью-Джерси(Picatinny Arsenal) иFoster-Millerвсего за шесть месяцев и $2 миллиона вооружили роботов.
Роботы-солдатыTalon,SWORDS (2004 г.)
Так "Когти" превратились в "Мечи" (SWORDS — Special Weapons Observation Reconnaissance Detection Systems), специальные системы обнаружения, разведки и наблюдения с оружием. Именно "Мечи" и окажутся в Ираке по весне. В стандартной комплектации у него имеется лёгкий пулемёт M249 калибра 5,56 миллиметров (750 выстрелов в минуту) или "средний" пулемёт M240 калибра 7,62 (700-1000в минуту). Без перезарядки робот может произвести 300 и 350 выстрелов соответственно. Цена одной машины $200 000.
Робот-солдатSWORD в действии
Робот-тараканInsBot (2003 г.)
Разработкой автоматизированного шпиона в тараканьем стане занимаются исследователи из трёх стран — Франции, Бельгии и Швейцарии. Уже сейчас InsBot способен проникать в группы тараканов, влиять на них и изменять их поведение.
В течение десятилетия прикинувшийся тараканом лазутчик будет выводить мерзких насекомых из тёмных кухонных закоулков на чистую воду — туда, где они могут быть уничтожены.
Разработчики робота-агентамечтают вовсе не о том, чтобы раз и навсегда извести тараканов. Их замыслы глобальнее. Используя роботов, они хотят управлять животными.
studfiles.net