Робот построил самое крупное сооружение, созданное машиной. Строительный робот
Каталог роботов для строительства
а также отдельным разделом - 3D-принтеры для строительства
ABB, Нидерланды
В Амстердаме роботы в 2017 году возведут (“распечатают”) пешеходный мост через один из каналов. Шестиосевые робо-руки ABB начнут движение на одном берегу и построят металлический мост практически автономно, двигаться они при этом будут по уже построенной части конструкции. Проектом занимается компания MX3D, которая получила необходимые разрешения. В проекте участвует компания Autodesk и строительная фирма Heijmans. Роботы способны использовать при сооружении моста несколько видов металла, пластмассы и комбинации этих материалов.
ATL-74R, Built Robotics, США

2017.10.25 Робот-трактор готов к выезду на стройплощадки будущего. В США испытывают строительный робот Built Robotics ATL-74R. Трактор полностью автономен: машина необходимы только координаты точки старта, данные о размерах площадки, которую требуется выровнять, и подтверждение человека, чтобы приступить к работе.
Brokk-180, Brokk, Швеция

Телеуправляемый робот для демонтажа (разрушения) среднего класса. Для использования в строительстве, а также на цементных производствах, в различных процессах и в ядерной индустрии. Компактный робот, способный наносить удары силой до 410 джоулей. Может работать с различными видами полезной нагрузки. Используется в России структурами МЧС в составе комплекса Брокк-180 в 2017 году.
BrokK-330D, Brokk, Швеция

Телеуправляемый робот для демонтажа (разрушения) с приводом от дизельного двигателя. Одна из наиболее мощных моделей в обширном семействе роботов Brokk. Используется в России структурами МЧС в составе комплекса Брокк-330Д в 2017 году.
Crabot
Гибридные роботизированные краны, которые возможно будут задействованы при строительстве комплекса зданий штаб-квартиры компании Google.
Geko PV+, GGRgroup, Объединенное королевство

Самоходный вакуумный подъемник-робот для остекления. Коленчато-локтевой подъемник с мощными приспособлениями для вакуумного захвата материалов. Способен удерживать плоские, тяжелые габаритные материалы, как в вертикальном, так и в горизонтальном положении с возможностью поворота до 180 градусов. Предназначен для использования в помещениях. До 175 кг, до 3 м высоты подъема. Ширина - 618 мм. Батареи хватает на 8 часов работы без подзарядки. Официальная страница: http://www.ggrgroup.com/products/glazing-robots/geko-pv-plus/ Робот известен с 2016 года или ранее.
Hadrian 105, Fastbrick Robotics, Австралия

Прототип. Полностью автоматически кладет кирпичи согласно чертежу. Производительность - до 15 тысяч кирпичей в день в теории. На июль 2016 года - до 225 кирпичей в час. Версия Hadrian X повысит до 1000 в час. Система лазерного наведения. Автоматическая подача раствора.
Hadrian X, Fastbrick Robotics, Австралия
2017. Автономная система для кладки кирпича. Первоначально существовал прототип Hadrian 105 с производительностью на июль 2016 года - до 225 кирпичей в час. Ему на смену должна прийти система Hadrian X с производительностью до 1000 кирпичей в час. Используется система технического зрения с лазерными дальномерами. Обеспечивается автоматическая подача строительного раствора и кирпичей.
Husqvarna DRX 140, Husqvarna, Швеция
2015.05.16 Husqvarna выпустила семейство управляемых по Bluetooth роботов для сноса зданий и сооружений DRX 140, DRX 250, DRX 310. От $120 тыс.
Husqvarna DRX 250, Husqvarna, Швеция
2015.05.16 Husqvarna выпустила семейство управляемых по Bluetooth роботов для сноса зданий и сооружений DRX 140, DRX 250, DRX 310. От $120 тыс.
Huaqvarna DRX 310, Husqvarna, Швеция
2015.05.16 Husqvarna выпустила семейство управляемых по Bluetooth роботов для сноса зданий и сооружений DRX 140, DRX 250, DRX 310. От $120 тыс.
In-situ Fabricator1, NCCR, Швейцария
Промышленный робот-манипулятор на подвижной платформе. На 2015.10 в реальных условиях стройки не используется. 2017.01.27 Строительные роботы определят будущее архитектуры?2015.10.26 Роботы и 3D-печать - будущее строительства? Обзорная статья.
Komatsu, Япония
Роботизированные карьерные грузовики и система телеуправления ими, использованные для автоматизации работ на строительной площадке. Используются в Японии на 2015 год. Есть также совместный проект с американской компанией Skytech по использованию беспилотников, которые формируют 3D-карты стройплощадки, использующиеся операторами робогрузовиков и роботизированных экскаваторов.
Oscar 1000, GGRgroup, Объединенное Королевство

Самоходный вакуумный подъемник-робот для остекления. Подъемник с мощными приспособлениями для вакуумного захвата материалов. Способен удерживать плоские, тяжелые габаритные материалы, как в вертикальном, так и в горизонтальном положении с возможностью поворота до 360 градусов. Предназначен для использования в помещениях. До 1000 кг. Ширина - 960 мм. Батареи хватает на 8 часов работы без подзарядки. Официальная страница: http://www.ggrgroup.com/products/glazing-robots/oscar-1000/. Робот известен с 2016 года или ранее.
ProTo R 3DP, CyVe Additive Industries, Нидерланды
принтер-манипулятор для возведения конструкций из бетона
SAM, Construction Robotics, США
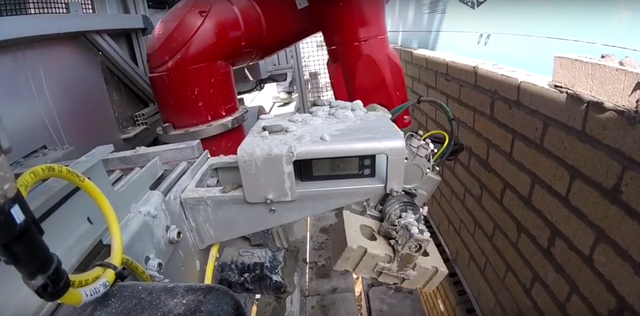
2017.03 Полуавтоматический робот-каменщик, предназначенный для кладки кирпича с высоким качеством и производительностью. Состоит из конвейера, промышленного манипулятора и насоса для подачи строительного раствора. Робот SAM с легкостью справляется с оконными проемами и отвесами, однако не может самостоятельно возводить углы. Система может различать разные по цвету кирпичи, что позволяет роботу возводить строения с рисунком на фасаде.
Super Guzzilla, Taguchi Industrial, Япония

источник фото: engadget.com
Управляемый робот на 4-х колесной тракторной платформе с двумя руками - манипуляторами, которые можно оснащать различными инструментами. Презназначен для разборки завалов, например, после землетрясений. Может применяться также для сноса здения и уборки стройплощадок. Разработчик: Taguchi Industrial, Япония.
robotrends.ru
Боты, дроны, роботы: останется ли место людям на стройке :: Мнения :: РБК Недвижимость
Какого бизнеса не коснись, ясно одно: цифровая экономика проникает даже в консервативные отрасли.
Возьмем, к примеру, строительство. Как показало глобальное исследование KPMG, 2/3 строительных компаний с выручкой $1–20 млрд используют удаленный мониторинг строительных площадок, трехмерное моделирование зданий и 1/3 — дроны, автоматизацию и роботов.
При этом лишь 60% опрошенных организаций из Северной Америки, Европы, Азии уже применяют описанные выше технологии, а остальные находятся на этапе запуска цифровых решений или подготовки к их внедрению.
В российской практике горизонт планирования гораздо короче. Строительные компании с удовольствием вкладываются в современную технику и материалы и со скрипом — в технологии, которые вернут инвестиции в среднесрочной перспективе.
Между тем от заказчиков мы все чаще получаем запросы на технологичность, а значит, в выигрыше будут те российские игроки, кто удовлетворит эту потребность и первым растиражирует мировые практики при возведении объектов.
Какие? Об этом, как раз, и пойдет речь.
Робот-геодезист
Значение геодезических работ в строительстве колоссально, ведь ошибки на этой стадии способны похоронить созданный объект.
В большинстве компаний этот труд выполняют геодезисты. С помощью тахеометра и спутниковых снимков они измеряют расстояния на местности, рассчитывают площадь и составляют карту, на которой в деталях изображено место будущей застройки. Процесс трудоемкий, и вероятность ошибок в результате влияния человеческого фактора сохраняется. Чтобы исключить их в расчетах, строительные компании стали использовать для геодезических работ дроны.
Качество снимков летающих роботов превосходит спутниковые аналоги, а расшифровка и создание трехмерной карты местности происходит автоматически. Кроме того, аэрофотосъемка — это еще и маркетинговый инструмент, который дает возможность клиенту следить за этапами возведения зданий, прокладкой инженерных сетей и благоустройством прилегающей территории объекта.
Робот-проектировщик
Ошибки при проектировании — еще одна головная боль российского строительного рынка. В нашей практике есть история, когда заказчики принесли двухмерное изображение будущего объекта, в котором мы обнаружили 99 ошибок. Логично, что смета заказчика стала недостоверна и без корректировки привела бы к неминуемому срыву сроков или остановке стройки.
Решить проблему позволило трехмерное проектирование, но еще лучше справился наш робот-проектировщик, который с той же легкостью находит неточности и безошибочно их устраняет. Сейчас бот принимает проектную документацию на строительство коммерческих и промышленных объектов через Facebook Messenger. В перспективе он может быть интегрирован в Telegram, Viber и WhatsАpp, а также постепенно сможет консультировать по различным вопросам, связанным со строительством.
Роботы-строители
Ручной труд на стройках тоже уходит в прошлое. Как на смену топорам пришли бензопилы, так на смену людям пришла бригада роботов. Одни способны самостоятельно обследовать стройку и докладывать прорабу об отклонениях от утвержденного проекта, другие в состоянии красить дома, класть кирпичи, возводить башни и выравнивать грунт. И это не предел.
Внимания заслуживает опыт скрещивания промышленной техники Komatsu с наработками Nvidia в области искусственного интеллекта. Контролируя дроны, платформа Jetson AI следит за ситуацией на строительных площадках и анализирует эффективность использования техники. После обработки изображений с камер беспилотника суперкомпьютер отправляет операторам варианты увеличения производительности и безопасности работ.
Робот-снабженец
Бесперебойное снабжение стройки крайне важно при возведении объектов. И как бы хороши ни были люди, роботы отлично себя в этом показывают.
На американских стройках небольшие датчики следят за объемами материалов на стройплощадке. Приближаясь к критической отметке хотя бы одного из них, система посылает сигнал на склад и оформляет заказ на приобретение дополнительных единиц. При этом математические алгоритмы не только контролируют текущие расходы, но и берут в расчет следующие этапы строительства, формируя заказы исходя из того, какие материалы на них понадобятся.
В связке с этой технологией работает российский робот «ТендерБот», разработанный компанией «АЦ Гермес». На основании технического задания робот способен самостоятельно делать рассылку среди поставщиков и собирать от них предложения.
Робот-инспектор по промышленной безопасности
Строительство — вторая по величине отрасль в мире, при этом крайне опасная. По разным оценкам, в России на нее приходится до 30% всех несчастных случаев со смертельным исходом на рабочем месте.
Для их предотвращения строительные компании привлекают экспертов по промышленной безопасности. Однако на рынке таких специалистов не хватает, а их услуги стоят дорого. Революцию в решении проблемы безопасности на промышленных предприятиях и стройках совершила американская компания Smartvid.io с помощью машинного зрения. Благодаря навыку самообучения искусственный интеллект круглосуточно с помощью камер следит за соблюдением техники безопасности и сигнализирует, когда обнаруживает нарушения — от рабочего без каски до лесов или лестниц, у которых отсутствуют ограждения.
Контроль за состоянием готового объекта
Похоже, в 2018 году бизнес понял, что хорошо бы оптимизировать затраты на эксплуатацию объекта, и на рынке стали появляться запросы на установку датчиков, отслеживающих состояние инженерных сетей и конструкции зданий.
На наш взгляд, спрос будет расти и дальше, а находить неполадки вместо людей станут специальные приложения и роботы. Аналог такого создал Корейский исследовательский институт атомной энергии (KAERI), предложив для мониторинга состояния промышленных сооружений робозмею в паре с дроном. Беспилотник легко подхватывает ее и быстро доставляет в место, где произошла поломка. Робозмея проникает в труднодоступные места и помогает найти место утечки в переплетении труб раньше человека.
Останется ли место человеку среди роботов?
Да, останется. Однако большинство профессий, связанных с ручным трудом, уйдут безвозвратно. Это значит, что уже сейчас стоит пересмотреть подходы к организации труда и обучению сотрудников на любом производстве. Развитость креативного мышления, навыков работы с дронами, роботами и данными суперкомпьютеров станут ключевыми составляющими успеха компании на рынке. Вопрос: успеют ли игроки вовремя спохватиться?
realty.rbc.ru
Робот построил самое крупное сооружение, созданное машиной
По планам создателей, такие роботизированные 3D-принтеры должны стать основным участниками строек будущего. Сейчас робот находится на стадии доработки, но ученые уже решили показать его в деле. За 13 часов творение инженеров МТИ построило самое большое из зданий когда-либо сооруженных роботом. На вид оно не особо функциональное, но то, как робот возводит его, выглядит эффектно.
Авторы в первую очередь надеются, что такие механизмы позволят эффективно строить здания на других планетах. Пока на них не будет достаточного количества людей, такие роботы смогут самостоятельно отстроить основную инфраструктуру для будущих колонистов, к примеру, Марса.
Ученые давно работают над автоматизацией строительства. Были роботы, которые автоматически укладывают кирпич, или 3D-принтеры, которые печатают из бетона, но они не ушли дальше демонстрационных вариантов. В промышленных масштабах такие системы по-прежнему не используются, возможно, из-за слишком узкой специализации.
Создатели этого робота заранее определили ряд критериев, которые должны характеризовать идеального строительного робота будущего, предназначенного, прежде всего, для космической колонизации. Такой робот должен быть маневренным. Он должен уметь получать материал из окружающей среды, например, уметь использовать минеральный состав марсианской пыли в качестве «чернил» для 3D-принтера. Это позволит ему сэкономить на материалах на колонизируемых планетах. У робота должна быть точная и мощная рука-манипулятор, чтобы он мог решать разные задачи, работать разными инструментами, поднимать тяжелые грузы.
Ни один из современных роботов не обладает таким функционалом, поэтому команда из МТИ решила создавать свой. Сейчас он представляет собой огромную руку, которая в зависимости от насадок может выполнять различные задачи: 3D-печать, нанесение изоляции, выполнение каких-то мелких механических задач. Часть названных учеными критериев пока не реализована, но это только промежуточный образец.
Мы писали об иркутском стартапе Apis Cor, который разработал строительный 3D-принтер. Устройство может напечатать небольшое здание площадью 37 кв. м за сутки. Стоит отметить, что здание хоть и небольшое, но гораздо больше напоминает жилое помещение, чем то, что напечатали в МТИ.
hightech.fm
Роботы строители - Мастерок.жж.рф
Fastbrick Robotics, компания из Перта (Австралия) создала робота по имени Hadrian, который совершает кирпичную кладку. Компания утверждает, что он способен построить фундамент дома в течение двух дней.
Но этот робот, больше похожий на обычный грузовик, просто кладет кирпичи.
Делает это быстро, аккуратно и тихо. Со скоростью и точностью, непостижимой обычным рабочим. Хороший трезвый строитель кладет 500—600 кирпичей в день (и еще меньше шлакоблоков). Дом, который бригада рабочих соорудила бы за 16—17 дней, Hadrian построит за двое суток (надо ли упоминать, что на обед и поспать он не уходит).
Чтобы запустить процесс, нужно поставить несколько маячков по габаритам сооружения, скрестить пальцы и начать исполнение программы. Чтобы воссоздать атмосферу стройки, запись отборного мата можно включить в магнитоле грузовика.
Hadrian может уменьшать материал до нужного размера, скреплять его раствором и класть по 1000 кирпичей в час, что в 20 раз быстрее средней скорости каменщика. Hadrian делает возможным возведение современных домов из кирпича со скоростью 150 зданий в год (при условии, что раздвижная стрела не будет опрокидываться).
Fastbrick Robotics Hadrian
Гигантская рука робота движется, опираясь на фиксированные метки, которые берут информацию из проекта дома в приложении 3D CAD. Он автоматически исправляет себя 1000 раз в секунду, чтобы предотвратить помехи от вибрации или электричества. Также есть лазеры для триангуляции положения, но все это звучит очень сложно.
Преимущества, казалось бы, в том, что робот-строитель может работать 24 часа в сутки, независимо от погодных условий или перерывов. Какая радость жить рядом со строительной площадкой, где круглосуточно работает такой робот и в буквальном смысле никогда не дает возможности поспать!
"Hadrian сокращает общее время строительства стандартного дома примерно на шесть недель, — заявил генеральный директор Fastbrick Robotics Майк Пивак для Gizmag. — В связи с высоким уровнем точности, которого мы достигли, большинство других компонентов, таких как кухни и ванные комнаты, а также стропила могут быть изготовлены параллельно и просто установлены, как только кладка будет завершена".
Если Вы вдруг беспокоитесь о том, что роботы заберут все наши хорошие рабочие места в строительстве и приготовлении кофе, примите во внимание, что Hadrian не только снизит отходы и выбросы (он, по идее, электрический), но и создаст рабочие места. В Австралии кладка кирпича, по-видимому станет частью карьеры прошлого, так как большинству мастеров-ремесленников сейчас за 50 и они приближаются к пенсионному возрасту. Приобщение робототехники к работе, как надеются изобретатели, даст рабочие места молодежи.
Fastbrick Robotics Hadrian
Инженеры из Швейцарии создали робота, заменяющего несколько профессиональных рабочих на стройке. Будущее – уже сегодня! Именно этим девизом руководствовались швейцарские новаторы, когда решили создать робота, предназначенного для выполнения арматурных работ на строительстве.
Исследователи из Швейцарской высшей технической школы Цюриха работают над проектом первого в мире дома, который будет спроектирован и построен с помощью цифровых производственных процессов. Дом получил название DFAB House.
Роботы способны за сутки сделать облицовку здания кирпичом, а с помощью 3D-печати можно строить мосты прямо на объекте — цифровые технологии призваны кардинально изменить подход к строительству. Группа исследователей из Швейцарской высшей технической школы Цюриха в настоящий момент тестирует работу этих технологий как в специально созданных средах для тестирования, так и в реальных условиях. DFAB House станет первым домом, который будет не только спроектирован на компьютере, но и практически полностью построен при помощи цифровых процессов строительства.
Трехэтажное здание возводится в Дюбендорфе (Швейцария) на территории исследовательского центра NEST — совместного проекта Швейцарской федеральной лаборатории материаловедения и технологий (Empa) и Швейцарского федерального института водных наук и технологий (Eawag). Над реализацией амбициозного проекта работают ученые из различных областей, включая архитектуру, робототехнику, материаловедение, структурный анализ и исследование социально-экологической ответственности. В результате в процессе строительства DFAB House будут использованы четыре инновационные технологии строительства, разработанные исследователями из Швейцарской высшей технической школы.
Fastbrick Robotics Hadrian
Швейцарцы решили, что для демонстрации всех возможностей устройства лучше всего построить целый дом. Монолитный дом в стиле хай-тек, одновременно являющийся лабораторией, на которой проверяются возможности робота, имеет площадь 200 кв. м и высоту в три этажа.
Строительство дома планируется закончить в 2018 году, а пока учёные совершенствуют своё устройство, которое, по их словам, должно полностью заменить рабочих, занимающихся армированием конструкций, и их заливку бетоном.
Робот передвигается на гусеничном шасси. Высота робота 2 метра, а высокоподвижная «рука» — манипулятор значительно расширяет площадь ведения работ. На данном этапе, для точного позиционирования на строительной площадке, роботу требуются помощники – люди.
Инженеры закладывают в бункер робота арматуру, затем раскладывают на поверхности фундамента – маркеры – специальные метки, необходимые для их считывания электронным «глазом» робота. Робот, сориентировавшись, двигается вдоль меток и производит монтаж арматурного каркаса в соответствии с проектом и загруженной спецификацией.
Fastbrick Robotics Hadrian[/caption]
Пока робот самостоятельно соединяет лишь горизонтальную арматуру и поперечные связи. Вертикальные стержни устанавливают люди, но, благодаря точному позиционированию и 3D моделированию, робот способен быстро вязать сложнейшие арматурные каркасы, имеющие криволинейную поверхность.
После монтажа каркаса он заливается специальной бетонной смесью с пластификаторами, повышающими её удобоукладываемость. По словам учёных, благодаря современным цифровым технологиям и 3D печати, которая также используется при строительстве пилотного здания, они надеются создать настоящий роботизированный комплекс, которым управляет один оператор.
Это должно ускорить все этапы строительства и свести т.н. «человеческий фактор» к минимуму. Кроме этого, внедрение новаций позволит возводить дома нестандартной архитектуры со сложными фасадами, арками и необычным гнутым интерьером.
Американцы разрабатывают строительного робота, который сам проектирует и печатает дома.
Когда речь заходит о строительных роботах и 3D печати домов, большинство людей представляет высокотехнологичный механизм под управлением человека. Таким роботам, как минимум, нужен один оператор и помощники — люди, которые будут их обслуживать. Инженеры из Массачусетского технологического института решили заглянуть в будущее и разработали прототип автономного робота-строителя.
Робот представляет собой самоходное шасси. В передней части «строителя» находится «рука» — умный многофункциональный манипулятор. За «рукой» с компьютеризированным механизмом управления размещается платформа со строительными материалами. На данный момент для отработки концепции робот возит за собой ёмкости с ППУ (пенополиуретаном) и пенобетоном, из которого он строит купольный дом по технологии несъёмной опалубки. Сначала возводится внешняя и внутренняя ППУ-стена, а промежуток затем заполняется пенобетоном.
На возведение купола диаметром 15 метров робот тратит около 10-14 часов. При этом робот не нуждается в управлении человеком и сам, сориентировавшись на местности по меткам, принимает решение, как ему возводить сооружение. Если раствор заканчивается, робот уезжает на базу для дозаправки, после чего продолжает строительство дома. По словам разработчиков, выбор материалов и методики возведения обусловлен тем, что так проще «научить» робота строить и внести соответствующие корректировки в программное обеспечение.
Следующий шаг — использование для строительства бетона, который для подвижности модифицируют специальными добавками. Для работы с разными строительными растворами предусмотрен набор насадок-распылителей. Кроме этого, по мере совершенствования робота научат работать с арматурой, сварочным аппаратом. И экскаваторным ковшом. По замыслу инженеров, со временем на базе прототипа получится создать полностью автономного робота.
Например, одним из сценариев может стать отправка нескольких роботов-строителей в отдалённый район, где они, взаимодействуя друг с другом, приступят к возведению строений. Причём роботы, в зависимости от исходных данных и наличия строительных материалов, сами рассчитают параметры строения и примут решение, из чего и как им строить. Дополнительно робота снабдят также солнечными батареями и набором сменных «рук».
Студенты Школы архитектурной ассоциации в Лондоне решили доказать, что робот может спланировать дом с нуля, без чертежей и заранее заготовленных материалов. Эксперимент увенчался успехом.Робот смотрит на деревья и сразу видит дом. Камеры сканируют стволы деревьев, с помощью специально написанных алгоритмов робот просчитывает форму древесины, находит осевые линии и оценивает индивидуальную прочность материала, после чего, опираясь на своеобразие формы предоставленного материала, создает проект здания.
В архитектурной лаборатории робот принимается за работу, режет и придает форму бревнам, делая заготовки для будущего строения, как будто выпиливая части для паззла. Конечно, без человеческой помощи не обошлось, именно люди создали видение машины, и конечная сборка дома тоже находится на их плечах, строить самостоятельно робот пока не может. Но это лишь вопрос времени и желания. Главное, что он прекрасно знает, как это сделать, и он такой не один. Современные дроны уже способны возводить башни, а для строительства космических станций разрабатываются роботы-пауки, освоившие технологию 3D-печати.
Робот для арматурных работ
Массачусетский робот-строитель
Массачусетский робот-строитель
Робот для арматурных работ
Робот для арматурных работ
Робот для арматурных работ
Робот для арматурных работ
Робот для арматурных работ
[источники]https://habr.com/company/robohunter/blog/384471/https://iq.intel.ru/dfab-house-%D0%B2-%D1%88%D0%B2%D0%B5%D0%B9%D1%86%D0%B0%D1%80%D0%B8%D0%B8-%D1%81%D1%82%D1%80%D0%BE%D1%8F%D1%82-%D0%B4%D0%BE%D0%BC-%D0%B8%D1%81%D0%BF%D0%BE%D0%BB%D1%8C%D0%B7%D1%83%D1%8F-%D1%82%D0%BE/https://www.forumhouse.ru/articles/house/7867https://www.popmech.ru/technologies/238694-robot-stroitel-sam-sebe-plotnik-arkhitektor-i-dizayner/
masterok.livejournal.com
Строительные роботы – уже реальность! - Роботы в строительстве - Brokk - Технологии - Робот
На рынке строительной техники Санкт-Петербурга, да и России в целом, появился новый класс машин – строительные роботы. По прогнозам экспертов, уже в ближайшем будущем дистанционно управляемая и автоматическая техника займет место обычных строительной техники. В нашем городе хорошо представлены строительные роботы шведской компании Brokk, в модельном ряду которого роботы весом от 500 кг и до 4,5 тонн.
Строительный робот – это электрическая дистанционно управляемая машина на гусеничном ходу, с мощным манипулятором и разнообразным навесным оборудованием. По габаритам робот Brokk 400 сравним с мини-техникой, а по производительности на равных соперничает с 20-тонным экскаватором.Компактные габариты позволяют им проезжать через дверные проемы (робот способен проходить в стандартный дверной проем шириной 0,8 метра и высотой 1, 4 метра), подниматься по лестничным пролетам в зданиях, работать в подвальных и производственных помещениях, на свайных полях, в бизнес-центрах и жилых домах. Этому способствует и то, что специальное оборудование выполняется из легких и малогабаритных деталей.
Малые размеры и весовые характеристики подобной техники делают удобной и ее транспортировку (практически на любом грузовике). Роботы могут оснащаться различным навесным оборудованием, что в сочетании с высокой маневренностью делает их порой даже более эффективными, чем технологии алмазного пиления и сверления, как по скорости выполнения работ, так и с точки зрения экономической целесообразности.
Отсутствие выхлопных газов, безударная технология, не передающая вибрацию от разрушаемого элемента, позволяет оператору работать в любых условиях, не нарушая техники безопасности: в узких тоннелях, подвалах, на краю высотных конструкций, рядом с ветхими перекрытиями, на реконструируемых мостах и виадуках.
Отсутствие шума позволяет проводить демонтаж в действующих зданиях даже в ночное время, в том числе в зданиях, находящихся в непосредственной близости от жилых домов и действующих объектов общественно-делового назначения.
По мнению специалистов, дискомфорт от шума исключается даже при вариантах реконструкции помещений внутри действующих объектов. Роботом при помощи пульта может управлять всего один квалифицированный оператор, который при демонтаже элементов ветхого здания располагается на безопасном расстоянии. Поэтому подобная технология весьма уместна в ситуациях, потенциально опасных для здоровья рабочего персонала.Кроме проблемы обеспечения безопасности, дистанционный принцип и эксплуатационные возможности демонтажных роботов помогают решить и «кадровый вопрос». Один такой агрегат заменяет собой несколько рабочих с отбойником. Отсюда и существенная экономия на зарплате персонала и соответственно на производстве работ.
Роботы используются там, где затруднительно или невозможно применение тяжелой техники, и главным образом для замены ручного труда. На практике один оператор с дистанционно управляемой машиной оказывается дешевле и производительнее бригады из 16 «гастарбайтеров», или двух машин типа «Bobcat». Роботы используются в ограниченных пространствах и внутри помещений, в подземном и высотном строительстве, при демонтаже и реконструкции, на свайных работах и «нулевом цикле».
Выполняемые задачи
- откопка,
- погрузка,
- разборка железобетонных и кирпичных конструкций,
- демонтаж металла,
- снятие слоев поверхности,
- бурение отверстий,
- перенос предметов,
- подрубка свай,
- забивание шпунтов,
- и другие работы.
Ярким примером успешности применения строительных роботов служит их участие в реконструкции Саяно-Шушенской ГЭС после недавней аварии.
Что касается Санкт-Петербурга, при реконструкции отдельных зданий или кварталов в историческом центре для того, чтобы сохранить уникальный облик реконструируемого здания, сейчас практикуют методику частичного сноса. Под этим понимается демонтаж только внутренних элементов зданий. Подобные работы отличаются особой сложностью по причине необходимости соблюдения оптимального баланса между обеспечением безопасности операций (как для персонала, так и для целостности самого объекта), и стремлением повысить производительность работ.
Запрет со стороны охранных ведомств на применение экскаваторов и прочей тяжелой техники вынуждал выполнять работы по разборке внутренних конструкций вручную, например, при помощи отбойных молотков и средств малой механизации. Однако это весьма трудоемко и неэффективно, к тому же очень сложно обеспечить должную технику безопасности рабочих. По мере увеличения объемов работ по реконструкции, вызванной взрывом инвестиционной активности по реализации проектов в центре города, актуальность проблемы росла из года в год. Постепенно в городе сформировался рынок услуг по специализированному демонтажу. Теперь с помощью строительных роботов можно решать самые сложные задачи по демонтажу внутренних железобетонных и кирпично-монолитных конструкций зданий.
Нынешний кризис естественно повлиял и на отрасль строительной робототехники, количество объектов под реконструкцию и снос изменилось. Но вместе с этим отмечается рост конкурентоспособности новой технологии среди всей мини-техники. Использование робота позволяет отказаться от покупки лишнего оборудования, что очень привлекает клиентов в этот непростой период. Многофункциональность – новый тренд в строительной отрасли. Впереди ожидается постепенное увеличение количества заказов на Brokk.
И это может показаться удивительным, но для строительных роботов отсутствует рынок машин бывших в употреблении. Их конструкция настолько практична и износостойка, что даже после 15-20 лет активной эксплуатации позволяет успешно выполнять свои задачи. А универсальность применения всегда ценится его владельцами, и те не спешат с ним расставаться.
К сожалению, в сфере строительной робототехники Россия вообще не представлена. А шведский производитель Brokk занимает лидирующее положение в мире и поставляет около 95 % всех дистанционно-управляемых роботов для различных отраслей производства и строительства. Около 12 лет назад первые образцы этих машин стали закупать для себя российские металлургические заводы и ядерные НИИ. И только 3 года назад роботы официально вышли на строительный рынок Санкт-Петербурга.
В остальном мире техника Brokk используется около 30 лет, доказав свою эффективность в ядерной, металлургической, химической и строительных отраслях. А теперь и в нашей стране, в нашем городе мы можем наблюдать, как отечественное строительство постепенно переходит на использование эффективных и современных технологий.
Ведь основные цели робототехники - повысить безопасность и производительность работ, уменьшить сроки их исполнения, сократить затраты на ручной труд и тяжелую механизацию, упростить технологию процесса строительства.И роботы Brokk являются отличным примером, того, как этих целей можно достичь.
Источник: ООО «Строительный тендер»www.stroyteh.ru
Структурная организация строительных роботов — Мегаобучалка
Д.Я. Паршин
ОСНОВЫ АВТОМАТИЗАЦИИ
И РОБОТОТЕХНИКИ
ЛЕКЦИИ
Раздел «Роботизация технологических
Процессов»
Ростов-на-Дону
Основы робототехники и роботизации процессов
Основные понятия и определения робототехники
Робототехника — это одно из важнейших направлений научно-технического прогресса, которое получило интенсивное развитие в последнее десятилетие. В настоящее время робототехника сформировалась как область науки и техники, которая занимается разработкой методов расчета и анализом работы манипуляторов и роботов различного назначения, их созданием, а также автоматизированных на их основе объектов и процессов.
В последние годы получило становление и развитие одно из направлений прикладной робототехники – строительная робототехника, основными задачами которой является создание и внедрение манипуляторов, роботов и на их базе – комплексов оборудования в строительстве и строительной индустрии, а также анализ экономических и социальных проблем их применения. В настоящее время специалистами многих стран проводятся работы, направленные на внедрение средств робототехники в строительство и вывод ее на передовой технический уровень. Это способствует формированию строительной робототехники как самостоятельной дисциплины.
Предметом исследований и разработок робототехники является принципиально новый класс машин и автоматов, обладающих многофункциональностью механических действий и универсальностью выполняемых операций. Такие универсальные автоматические машины многоцелевого назначения, которые в процессе работы воспроизводят подобие двигательных или интеллектуальных функций человека, называются роботами. Наибольшее распространение при автоматизации производственных операций получили так называемые промышленные роботы.
Промышленный робот -это стационарная или передвижная автоматическая машина, представляющая собой совокупность манипулятора и перепрограммируемого устройства управления и выполняющая в производственном процессе двигательные и управляющие функции. Таким образом, одним из отличительных признаков промышленных роботов является наличие одного или нескольких манипуляторов. Строительные роботы следует рассматривать как разновидность промышленных роботов, предназначенных для выполнения операций строительного процесса.
Промышленные роботы характеризуются универсальностью и гибкостью. Под универсальностью роботов понимается возможность выполнения ими многих операций технологического процесса, в том числе и вспомогательных. Универсальность промышленных роботов достигается степенью подвижности манипуляторов и конструкцией рабочих органов. Гибкость управления определяется быстротой их перестройки на выполнение новых операций при освоении новой продукции.
Новый этап производства, характеризуемый использованием при технологических операциях промышленных роботов, обладающих многофункциональностью механических действий, называется роботизацией производства. Роботизация строительного производства является одним из основных путей повышения темпов развития строительства, усиления его интенсификации и ускорения научно-технического прогресса. Она служит крупным резервом резкого сокращения ручного труда и повышения качества производства работ в строительстве.
На предприятиях стройиндустрии, а также на строительных площадках роботы могут объединяться с другим технологическим оборудованием в технологический комплекс. Автономно функционирующая в едином цикле совокупность технологического оборудования и промышленного или строительного робота называется роботизированным технологическим комплексом (РТК).
Перспективным направлением дальнейшего совершенствования технической и технологической базы в стройиндустрии является создание гибких автоматизированных систем (ГПС), которые в общем случае представляют собой совокупность программно-управляемого технологического оборудования, роботизированных технологических комплексов, гибких производственных модулей и систем обеспечения их функционирования в автоматическом режиме в течение заданного интервала времени. Внедрение ГПС основано на широком использовании средств автоматизации, микропроцессорных систем управления, роботов и РТК. Разновидностью ГПСявляется гибкий автоматизированный участок (ГАУ), в котором предусмотрена возможность изменения последовательности использования технологического оборудования.
Структурная организация строительных роботов
Исполнительное устройство – это основа любого робота, которая обеспечивает выполнение всех его двигательных функций и взаимодействие с объектами роботизации на базе управляющих воздействий, формируемых устройством управления. Оно включает манипулятор и устройство передвижения.
Манипулятор перемещает рабочий орган в соответствии с заданными законами движения, определяемыми технологическими требованиями. В общем случае он представляет собой многозвенный механизм, который может состоять из ряда кинематических пар с вращательным или поступательным перемещением. Для приведения в действия звеньев манипулятора используют гидравлические, электромеханические или пневматические приводы.
Основными характеристиками манипуляторов являются число степеней подвижности, маневренность, грузоподъемность. Строительные манипуляторы в большинстве случаев должны обеспечивать поступательные движения рабочих органов по трем координатам; их поворот вокруг одной, двух или трех осей; вращательные движения относительно одной оси с одновременным поступательным перемещением относительно двух других или два вращательных и одно поступательное в радиальном направлении.
Манипуляторы снабжаются рабочим органом, который служит для непосредственного взаимодействия с объектом роботизации или выполнения различных технологических операций. В качестве рабочего органа в промышленных и строительных роботах могут быть захватные устройства либо специальный рабочий инструмент. Захватные устройства обеспечивают взятие и удержание в определенном положении объектов манипулирования. В зависимости от способа захвата и удержания объектов различают механические, электромагнитные, вакуумные и комбинированные захватные устройства. Захватные устройства могут снабжаться специальными датчиками, дающими информацию о взятии и установке предмета, усилии сжатия, скорости перемещения, положении охвата относительно объекта манипулирования и т. д. Такие захватные устройства относятся к очувствленным
Важной составной частью мобильных роботов является устройство передвижения. В общем случае мобильные промышленные и строительные роботы могут иметь колесные, гусеничные, монорельсовые, на воздушной подушке и другие устройства передвижения. В строительной индустрии для роботизации основных технологических процессов возникает необходимость использования монорельсовых или мостовых устройств передвижения. Представляет интерес создание устройств передвижения строительных роботов (отделочных, сборочных и др.), которые обеспечили бы возможность перемещения по лестничным переходам с этажа на этаж.
Важное значение для строительных роботов имеет компоновка исполнительного устройства. При размещении манипуляторов на устройстве передвижения обязательно учитываются особенности технологии выполнения работ, ограниченность пространства на строительных объектах, необходимость перемещения через узкие дверные проемы и ряд других факторов.
Устройство управления строительных роботов предназначено для формирования и выдачи управляющих воздействий исполнительному устройству в соответствии с управляющей программой. Оно обеспечивает логическую последовательность действий робота, автоматическую работу исполнительного устройства по заданной программе, а также осуществляет связь между действиями манипулятора и обслуживаемого им оборудования. В зависимости от вида устройств управления может обеспечиваться дистанционный, полуавтоматический или автоматический режим работы строительных роботов. Устройства управления в общем случае содержат измерительные, вычислительные, запоминающие и выходные элементы. Измерительные элементы выполняют сбор, первичную обработку и передачу в систему управления информации о функционировании узлов и механизмов робота и о состоянии среды. В их состав входят датчики, которые собирают информацию о положении звеньев манипулятора, состоянии рабочего органа, статических и динамических нагрузках, скоростях перемещения, а также информацию об объекте манипулирования и состоянии технологического оборудования. Устройства для сбора внешней информации называют сенсорными, которые могут быть осязательными (тактильными), световыми, локационными, силоизмерительными, визуальными и др.
Вычислительные и запоминающие устройства служат для обработки и хранения информации. В вычислительном устройстве реализуется алгоритм управления роботом и обрабатывается измерительная информация, а в запоминающем устройстве хранится программа функционирования робота при выполнении определенных технологических операций, а также порядок взаимодействия блоков устройства управления, исходные данные и другая информация. Устройства управления в основном реализуются на микроЭВМ или микроконтроллерах. Выходные устройства служат для передачи команд на исполнительные приводы манипулятора и устройства передвижения, которые по отношению к системам управления являются объектами управления.
Комплекс средств общения с оператором необходимо рассматривать как составную часть устройства управления. Пульты ручного управления обеспечивают ввод в управляющее устройство задания в виде программы или отдельных команд, обучение робота, дистанционное и ручное управление манипулятором, рабочим органом и устройством передвижения, а также контроль правильности выполнения задания. Общение человека-оператора с устройством управления выполняется с помощью элементарных команд с пульта управления либо с помощью специального языка общения. Управление роботом осуществляется на основании управляющей программы, которая представляет собой совокупность команд, определяющих заданную последовательность функционирования робота, а также его взаимодействие с обслуживаемым технологическим оборудованием.
Строительные роботы в зависимости от своего назначения могут иметь структурную организацию, отличающуюся от рассмотренной структуры наличием различного рода дополнительных устройств. В их состав могут входить наряду с основным манипулятором один или несколько вспомогательных манипуляционных устройств Отдельные виды строительных роботов могут иметь два и более синхронно работающих манипулятора, выполняющих операции с одним и тем же объектом манипулирования. Для выполнения отделочных работ роботы могут содержать несколько манипуляторов с различными рабочими органами, работающих по общей программе или независимым программам управления. Кроме того, специализированные монтажные и отделочные роботы могут снабжаться набором сменного рабочего инструмента и специальной технологической оснасткой.
На предприятиях стройиндустрии роботы обычно включаются в состав системы технологического оборудования. Поэтому в данном случае они должны рассматриваться как элементы комплексной автоматизации технологической линии. Отличительной особенностью структурной организации РТК является необходимость взаимосвязанного функционирования разнородного оборудования, входящего в состав комплекса. Это достигается путем группового управления оборудованием, обеспечивающим взаимодействие и синхрониза-цию работы различных устройств. Оборудование РТК объединяется общей системой автоматического управления, при этом устройства локального управления отдельными роботами и технологическим оборудованием составляют нижний уровень управления. Уровень управления комплекса связывает отдельные системы управления нижнего уровня, включая и устройства управления транспортными средствами, в согласованно работающий комплекс оборудования. Кроме координации работы на уровне управления комплекса может осуществляться контроль технологических режимов и исправности оборудования, синтез управляющих программ для нижнего уровня, обработка и передача информации между устройствами управления отдельным оборудованием.
megaobuchalka.ru
Строительный робот SAM отправится в Объединенное Королевство
Аналитики до сих пор ломают копья в спорах о том, создаст ли технологический прогресс дополнительные вакансии или, напротив, вызовет массовую безработицу и социальный коллапс. И если в большинстве отраслей ситуация до сих пор остается неопределенной, то тенденцию в строительном бизнесе вполне можно назвать пугающей. Так, например, роботы-каменщики SAM (Semi-Automated Mason - полуавтоматический каменщик) способны уложить до 3000 кирпичей за время, пока профессиональный каменщик уложит 300-500.
Робот SAM состоит из конвейера, промышленного манипулятора и насоса для подачи строительного раствора.
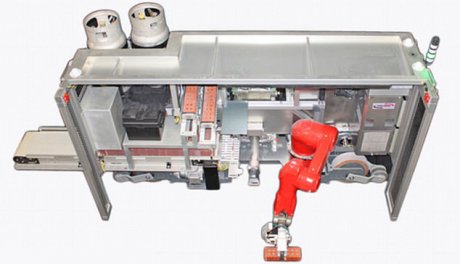
Работает SAM так: строитель подает кирпичи на небольшой конвейер, откуда их подбирает роботизированный промышленный манипулятор, покрывает цементным раствором и ведет кладку. Второй рабочий удаляет с нее излишки раствора. Качество получающейся кладки - очень хорошее, робот не устает и не халтурит.
Разработка нью-йоркского стартапа Construction Robotics уже заменила людей на нескольких стройплощадках в Америке. В Construction Robotics планируют освоить и рынок Объединенного Королевства - предварительные переговоры с местными строительными компаниями уже начались. Есть все предпосылки к тому, что переговоры будут успешными.
Средний возраст трети всех британских строителей превышает 50 лет - это значит, что свыше 620 тысяч человек уйдут на пенсию в ближайшие 10 лет. При этом, в стране наблюдается острая нехватка жилья. Так что для массового применения роботов на стройках Британии, как говорится, подошел срок - эксперты ожидают, что процесс их внедрения начнется в ближайшие пару лет.
Робот SAM с легкостью справляется с оконными проемами и отвесами, однако не может самостоятельно возводить углы. По заверениям разработчиков, эксплуатация 6 систем обходится строительным компаниям в $20 тысяч в месяц. Стоимость одного робота по российским меркам немалая - около $0.5 млн. На стройках США и Объединенного королевства роботы будут окупаться, уверены разработчики. А в России, наверное, по-прежнему дешевле окажутся услуги гастарбайтеров.
SAM - не единственная автоматизированная система, предназначенная для возведения кирпичной кладки.

Основной конкурент на сегодня - это полностью автономная система Hadrian (действующий прототип) и Hadrian X из Австралии. Робот Hadrian кладет кирпичи, согласно загруженной в него компьютерной модели будущей постройки. Производительность системы - до 15 тыс. кирпичей в день. Для этого используется система технического зрения на основе лидаров. Предусмотрены меры безопасности - робот не должен травмировать людей, если они случайно зайдут в рабочую зону. В сентябре 2016 года робота Hadrian X договорились задействовать в городе Перт для возведения стен одиннадцати кирпичных особняков. В Австралии уже поговаривают о будущем снижения цен на недвижимость и ускорения строительства жилья в связи с роботизацией.

Есть и европейские разработки, например, In-situ Fabricator 1. В Швейцарии разработчики из NCCR поставили промышленный манипулятор на мобильную платформу - робот может вести кладку или сварку арматуры. Это прототип, о внедрениях слышать пока не приходилось.
Арсенал роботов для строительства не исчерпывается робокаменщиками. В каталоге RoboTrends.ru можно найти машины для манипуляций с тяжелыми стеклами, роботов для сноса зданий и разрушения строительных конструкций, роботизированные краны, строительные 3D-принтеры для возведения мостов и стен из бетона, автономные карьерные грузовики.
++
robotrends.ru