Содержание
Робот «Атлас» — с полигона Кубка РТК в Арктику!
Арктический плавучий университет завершил первую экспедицию сезона: «Профессор Молчанов» вернулся в порт, на второе плавание его заменит научно-экспедиционное судно «Михаил Сомов». Александр Гордейчик, один из участников дебютного в этом году плавания, в Арктике проверял возможности своего робота-вездехода: новаторского проекта, разработанного в лабораториях САФУ. Его «Atlas» уже не раз демонстрировал возможности на искусственных препятствиях, по реальному бездорожью он проехал впервые.
— В рамках какого проекта разрабатывался робот?
В рамках внеучебной деятельности и участия в соревнованиях по робототехнике. Мы разрабатываем проекты в лабораториях кафедры автоматики, робототехники и управления техническими системами [САФУ – прим.ред.]. В них мы с одногруппниками занимаемся различной проектной деятельностью, каждый своим проектом. У кого-то это проекты по учебе, у кого-то это самостоятельные разработки.
— В чем уникальность конструкции робота по сравнению с аналогами?
У робота установлено шесть колес с самостоятельными моторами. Это обеспечивает высокую проходимость по различным препятствиям. Также на нем установлена камера для передачи видеосигнала на экран компьютера, чтобы дистанционно управлять роботом. В идеале такой робот должен работать там, где не могут присутствовать люди: в зонах ЧС, ЧП и на бездорожье.
Фото: дневники Арктического плавучего университета
— С какой целью проектировался данный робот и смог ли ты апробировать эту цель в экспедиции?
Основной целью для экспедиции были ходовые испытания в арктических условиях. Данные испытания прошли успешно. Высадки происходили в северной части архипелага Новая Земля, их было четыре в различных бухтах. Самой разнообразной была высадка на Мысе Желания. Там было множество разных типов поверхностей для испытания: камни, почва, растительность, заболоченная местность.
— Робот, побывавший в Арктике, до этого уже отмечался на всероссийских соревнованиях. В чем суть этих соревнований?
Это были соревнования «Кубок РТК». Ребята со всей страны разрабатывают своих роботов для прохождения испытательного полигона. Полигон состоит из большого числа блоков, имитирующих различные препятствия. Также там есть задания на работу манипулятором. Выигрывает команда с наилучшим результатом. Баллы начисляются за преодоление каждого участка полигона и выполнения различных заданий – доставка груза, автоматическая езда по линии, нажатие кнопок.
— Насколько сильно смоделированные участки «препятствий» отличались от реальных, которые ты опробовал в экспедиции?
Самым главным отличием являются размеры лабораторных препятствий. Они небольшие, их можно просто проскочить на скорости. Например, есть блок с тремя большими камнями который проходится достаточно легко. При этом «на деле» каменистый участок оказался достаточно сложным для беспрепятственного движения. После полигона реальные условия позволяют в полной мере оценить проходимость на различных типах поверхностей.
После полигона реальные условия позволяют в полной мере оценить проходимость на различных типах поверхностей.
— Какие были основные трудности управления роботом на реальных препятствиях?
Адаптация к различным типам поверхностей, которые предполагают разное управление. Например, на мелкой гальке легко разворачиваться на месте, на выброшенных водорослях делать это уже сложнее.
— Вносил ли ты какие-то изменения в конструкцию робота перед высадкой?
Было снято навесное оборудование, предназначенное для движения робота по черной линии шириной около пяти сантиметров, это один из участков полигона соревнований. Робот должен следовать по данной линии самостоятельно, без управления человеком. Также удалены некоторые детали, предназначавшиеся исключительно для соревнований.
— Появились ли у тебя какие-то планы по изменению или доработке конструкции робота после проб в Арктике?
После первой высадки сразу были внесены изменения в конструкцию. Были добавлены провода, которые упрощали обслуживание робота на высадках. Считаю, испытания прошли успешно. Робот показал высокую надежность и проходимость
Были добавлены провода, которые упрощали обслуживание робота на высадках. Считаю, испытания прошли успешно. Робот показал высокую надежность и проходимость
— После собеседования ты оказался в списке «запасных». Когда ты узнал, что все-таки едешь?
Не в запасных, а в резерве! В начале мая мне позвонили и сказали, что освободилось место и узнали, могу ли я поехать. Я согласился.
— Был ли какой-то план по апробации проекта, знал ли ты заранее, где тебе придется высадиться с роботом?
Был список предполагаемых мест высадок и планируемые работы на них. Количество испытаний и их объем варьировались в зависимости от местности. Проводилось измерение скорости передвижения на различных поверхностях. Оценивалась проходимость робота и время работы от аккумулятора.
Автор: Полина Кунакова
Фото: дневники Арктического плавучего университета, официальный сайт «Кубок РТК»
Источник: Информационное агентство «Двина Сегодня»
Путь робота.
 Как создавалась робототехническая компания Boston Dynamics
Как создавалась робототехническая компания Boston Dynamics
Робот Atlas. Фото: Boston Dynamics
Исследователи из компании Boston Dynamics в феврале показали видео, на котором робот, похожий на собаку, открывает дверь с помощью манипулятора. Это не первое видео в погоне Boston Dynamics за созданием идеального робота: в прошлом году компания показала, как человекоподобная машина делает сальто. О том, как роботы от Boston Dynamics стали самыми обсуждаемыми в мире, рассказывает Republic.
Профессор Массачусетского технологического института (MIT) Марк Рэйберт основал Boston Dynamics в 1992 году. До этого он несколько лет разрабатывал роботов в своей лаборатории Leg Lab — устройства могли удерживать баланс, бегать или подниматься по небольшим лестницам. В начале 90-х годов Рэйберт вместе со студентами помогал создавать роботов на съемочной площадке боевика «Восходящее солнце» с Шоном Коннери. После участия в съемках Рэйберт захотел заниматься продуктом и создал Boston Dynamics.
Boston Dynamics разрабатывала платное программное обеспечение для работы с 3D-моделями и в начале нулевых компания заключила контракт с Центром боевого применения морской авиации и компанией American Systems. Вместе они разработали симулятор катапультирования пилотов (до этого летчикам показывали обучающие видео). Тренажер, который создавал интерактивные сценарии для тренировок, обошелся в $1,3 млн. Финальную версию тренажера представили в 2002 году.
Затем компания занялась роботами. Так, в компании пытались создать устройство с ногами, как у таракана, которое могло взбираться на различные поверхности. Уже в 2003 году Boston Dynamics стала работать с Управлением перспективных исследовательских проектов Минобороны США (DARPA). В Минобороны заказали у компании роботов-мулов, которые должны были перевозить тяжелые грузы. Через два года компания Рэйберта вместе с разработчиками из NASA, Гарварда и робототехнической Foster Miller создали прототип робота BigDog, способного перевозить на себе до 45 кг грузов. Устройство сохраняло баланс даже после удара.
Уже в 2003 году Boston Dynamics стала работать с Управлением перспективных исследовательских проектов Минобороны США (DARPA). В Минобороны заказали у компании роботов-мулов, которые должны были перевозить тяжелые грузы. Через два года компания Рэйберта вместе с разработчиками из NASA, Гарварда и робототехнической Foster Miller создали прототип робота BigDog, способного перевозить на себе до 45 кг грузов. Устройство сохраняло баланс даже после удара.
В 2009 году в DARPA рассказали об испытаниях BigDog. Робот перенес миномет массой 36 кг по труднопроходимому участку длиной 200 м, а также в автономном режиме следовал за военными 13 км. Это расстояние машина преодолела за три часа. В этом же году DARPA направила $32 млн на улучшенную версию BigDog. Модификацию LS3 показали в 2012 году. Устройство смогло переносить грузы массой до 180 кг на расстояние до 32 км. Но уже в 2015 году военные отказались от LS3 из-за того, что робот бы слишком шумным.
В апреле 2009 года в DARPA заключили контракт на $26 млн с MRIGlobal (управляет исследованиями Департамента энергетики и Министерства обороны США). В Минобороны США хотели получить антропоморфного робота для испытаний костюмов химзащиты. Дизайн для роботов создавали в Boston Dynamics. Там же и собирали роботов. Готовое устройство могло самостоятельно ходить и ползать.
В Минобороны США хотели получить антропоморфного робота для испытаний костюмов химзащиты. Дизайн для роботов создавали в Boston Dynamics. Там же и собирали роботов. Готовое устройство могло самостоятельно ходить и ползать.
В 2013 году Boston Dynamics показала человекоподобного робота Atlas. Высота устройства — полтора метра, а масса — 75 кг. Робот, способный поднимать до 11 кг грузов, работает от батареи и анализирует окружающую обстановку с помощью лидаров (их также устанавливают в беспилотные автомобили). Atlas создали по заказу DARPA для робототехнического конкурса, на котором разработчика предлагали создать дизайн Atlas и написать на него собственное программное обеспечение.
Компания Google приобрела Boston Dynamics в 2013 году (стороны не раскрывали сумму сделки). Тогда у компании был контракт с DARPA на поставку роботов Atlas стоимостью $10,8 млн. Ей разрешили сотрудничать с Минобороны США. Boston Dynamics перевели под управление Google X, которая специализируется на перспективных проектов. В 2013 году Google купила еще восемь робототехнических компаний.
В 2013 году Google купила еще восемь робототехнических компаний.
После ухода их Google разработчика Android Энди Рубина у компании испортились отношения с Boston Dynamics. В Google хотели получить от Boston Dynamics коммерчески успешного робота, а часть сотрудников компании присоединилась к Toyota. В начале 2016 года агентство Bloomberg сообщило о возможной продаже Boston Dynamics. Однако робототехническая компания продолжила показывать новых роботов.
Летом 2017 года стало известно, что Alphabet (холдинг владеет Google) продает разработчика роботов Boston Dynamics японской SoftBank. По информации Financial Times, сумма сделки может превышать $100 млн. У самой SoftBank есть собственное робототехническое подразделение. А роботы Pepper от SoftBank помогают продавать смартфоны, планшеты и умные часы в магазинах корпорации. В японской компании еще не сообщали о планах на Boston Dynamics.
По информации Financial Times, сумма сделки может превышать $100 млн. У самой SoftBank есть собственное робототехническое подразделение. А роботы Pepper от SoftBank помогают продавать смартфоны, планшеты и умные часы в магазинах корпорации. В японской компании еще не сообщали о планах на Boston Dynamics.
По мнению экспертов, сейчас нельзя называть роботов от Boston Dynamics автономными: устройства не могут сами решить, что им делать, и следуют установкам, которые им дали люди. Сам Рэйберт хочет создать идеальных роботов, которые будут полностью повторять движения человека и животного. Для этого, по его словам, необходим проект, в котором программное и техническое обеспечение объединятся с бихевиоризмом.
Подписывайтесь на наш канал в Telegram!
Робот Атлас от Boston Dynamics — Придбати робота для бізнесу | навчання | розваги
Как роботы думают
20 июля, 2021
Робот для ТРЦ
26 июля, 2021
На сегодняшний день робот Atlas самый динамичный робот умеющий прыгать, бегать, крутить сальто и танцевать. О процессе создания этого робота будущего рассказал основатель Boston Dynamics Марк Райберт, а также инженер Скотт Куиндерсма. Чтобы увидеть робота в действии посмотрите видео ниже и переходите к прочтению статьи.
О процессе создания этого робота будущего рассказал основатель Boston Dynamics Марк Райберт, а также инженер Скотт Куиндерсма. Чтобы увидеть робота в действии посмотрите видео ниже и переходите к прочтению статьи.
Новое слово в современной роботехнике — это умный робот, но, чтобы стать умным роботу требуется иметь два рода интеллекта: двигательный и когнитивный. Двигательный нужен, чтобы управлять своим телом: ходить, бегать, прыгать, держать равновесие и другие действия связанные с движениями. Роботу требуется совершать движения без алгоритмов заложенных программистами, а самостоятельно в соответствие с окружающей средой. Для когнитивного интеллекта свойственно понимание проблемы и решение этой проблемы роботом.
При создание робота Атлас Boston Dynamics хорошо решило проблему двигательно интеллекта, как мы могли заметить в видео, робот с легкостью выполняет сложнейшие трюки. При создание двух типов интеллектов, вначале создают двигательный, чтобы когнитивный уже опирался на крепкую походку и движения робота. А уже далее оба рода интеллекта сопрягают друг с другом для хорошего взаимодействия.
А уже далее оба рода интеллекта сопрягают друг с другом для хорошего взаимодействия.
Атлас основан на человеческом восприятии реального мира, он воспринимает информацию через камеры и лидар, далее мощный компьютер обрабатывает эту информацию, строит карту и робот вычисляет свои возможности в этой среде. Робот знает как нужно ступить и подстраивает свои ступни, подстраивает равновесие и движения руками. Атлас видит то же самое, что и человек. Благодаря обратной связи (датчикам давления) роботу легче пересекать сложную местность и брать в руки предметы.
Робот — это не только программное обеспечение, но и детали. Центральной частью Атласа является его сверх легкий, мощный гидравлический силовой агрегат. Разработкой агрегата занимался компания и он вмещает в себя насос, резервуар, двигатель, батарею, фильтры, элетронику и охлждение. Данный агрегат прочный и помещен внутрь робота. Питание агрегата осуществляется от аккумулятора емкостью 1,4 кВт*час. Прочные материалы агрегата позволяют выдерживать падения и вибрации.
Разработчикам компании пришлось потрудиться для создание робота. Для создания прочной рамы применили пространственную конструкцию корпуса, ног и рук. Придумали особые сервоклапаны и напечатали на 3D принтере гидравлический коллектор для 18 клапанов, а встроенные фитинги и шланги помогли облегчить вес агрегата.
В голове Атласа установлены камеры, которые позволяют ему контролировать свое передвижение в режиме реального времени. В теле робота 28 суставов, датчики измеряющие ускорение, положение тела при движении, также робот анализирует данные для взаимодействия с окружающей средой.
Равновесию Атласа могут позавидовать спортсмены, робот может выполнять сальто с четким приземлением на обе ноги. Робот способен использовать силу инерции для экономии энергии. В стопы робота встроены сенсоры позволяющие ему определять степень усилия, которую необходимо приложить к ногам. Каждый сложный трюк требует много вычислений. Равновесие робот держит самостоятельно — это значит, что если толкнуть его, то он не упадет, а сделает шаг позволяющий ему не упасть.
Пока еще роботом управляет оператор, который нажимает кнопки, куда идти, бежать, где сделать поворот. Но выполняет эти движения он самостоятельно отталкиваясь от среды в которой он находится. Он сам понимает как преодолеть преграды и пересеченную местность. Для человека задача не сложная, но не для робота. Приступим к рассмотрению, как закладывают алгоритмы и изобретают элементы управления роботом.
Компания Boston Dynamics заложила прогнозирующую модель к программированию робота. Разработчики включают всю имеющуюся у них информацию для программирования и управления динамическими характеристиками. Еще они делают много предварительных вычислений для всего, что может потребоваться роботу при выполнении той или иной задачи.
В Атлас загружена полная библиотека заранее рассчитанных траекторий движений. Умный робот берет информацию из нее для своих движений и адаптирует под среду нахождения робота. Еще рано говорить о самостоятельном обучении робота, над этим только работают программисты.
Система позволяющая роботу видеть, основана на геометрической сегментации, которая разбивает области на простые геометрические фигуры. Эти данные робот воспринимает, а его компьютер обрабатывает полученную информацию для планирования своих действий, таких как балансировка, бег, движения руками и ногами. Вся информация поступает в режиме реального времени и робот ее также обрабатывает, чтобы подстроится под окружающую среду.
Большим преимуществом робота является то, что сделав сальто один раз, он его может его повторить множество раз. Один раз научил и легко сделает все последующие!
Для танца Атласа потребовался хореограф. Его работа заключалась в том, чтобы определить какие па может выполнить робот. Моделирование потребовалось также, чтобы пересмотреть движения доступные для работа. Вначале все движения симулировали на компьютере, настраивали, а после отрабатывали в реальности. Для танцующего робота потребовалось 2 месяцы усердной работы всего коллектива.
Купить робота Atlas пока еще нельзя. Он недоступен для покупки ни в одной стране мира, в том числе и в Украине. Инженерам предстоит его доработать для работы среди людей. Как только Атлас поступит в свободную продажу, мы опубликуем его в нашем магазине и напишем статью о нем и его функциях. А что Вы дорогие читатели думаете об этом продвинутом роботе, напишите пожалуйста в комментариях.
Он недоступен для покупки ни в одной стране мира, в том числе и в Украине. Инженерам предстоит его доработать для работы среди людей. Как только Атлас поступит в свободную продажу, мы опубликуем его в нашем магазине и напишем статью о нем и его функциях. А что Вы дорогие читатели думаете об этом продвинутом роботе, напишите пожалуйста в комментариях.
Внутри проекта Boston Dynamics по созданию роботов-гуманоидов – TechTalks
Робот Boston Dynamics Atlas успешно проходит паркур-трек
Boston Dynamics известна яркими видеороликами, на которых роботы совершают впечатляющие подвиги. Среди творений Boston Dynamics — Atlas, робот-гуманоид, ставший популярным благодаря непревзойденным способностям прыгать через препятствия, делать сальто назад и танцевать. Видеоролики с роботами Boston Dynamics обычно становятся вирусными, собирая миллионы просмотров на YouTube и вызывая дискуссии в социальных сетях.
И последнее видео робототехнической компании, на котором Атлас успешно управляет трассой паркура, не является исключением. Через несколько часов после выпуска он получил сотни тысяч просмотров и стал одним из десяти самых популярных трендов американского Твиттера.
Через несколько часов после выпуска он получил сотни тысяч просмотров и стал одним из десяти самых популярных трендов американского Твиттера.
Но более интересным видео было беспрецедентное закулисное повествование о том, как инженеры Boston Dynamics разработали и обучили Атлас управлять трассой паркура. Видео показывает некоторые неудачи Atlas и является отходом от традиции компании показывать доведенные до совершенства результаты этой работы. Видео и сопутствующая запись в блоге дают очень важную информацию о проблемах создания роботов-гуманоидов.
Исследования против коммерческих роботов
Официально Boston Dynamics является коммерческой организацией. Компания хочет коммерциализировать свои технологии и продавать продукцию. Но по своей сути Boston Dynamics — это исследовательская лаборатория, в которой работают инженеры и ученые, которые также хотят раздвинуть границы науки, невзирая на коммерческую выгоду. Совместить эти две цели очень сложно, и свидетельством тому является то, что Boston Dynamics несколько раз меняла владельца за последнее десятилетие, переходя от Google к SoftBank и Hyundai.
Но по своей сути Boston Dynamics — это исследовательская лаборатория, в которой работают инженеры и ученые, которые также хотят раздвинуть границы науки, невзирая на коммерческую выгоду. Совместить эти две цели очень сложно, и свидетельством тому является то, что Boston Dynamics несколько раз меняла владельца за последнее десятилетие, переходя от Google к SoftBank и Hyundai.
Компания стремится создать успешную бизнес-модель и уже выпустила несколько коммерческих роботов, в том числе Spot, многофункциональную робо-собаку, и Stretch, мобильную робо-руку, которая может перемещать коробки. Оба нашли интересное применение в разных отраслях, и с производственными мощностями Hyundai Boston Dynamics может превратить их в прибыльные предприятия.
Atlas, с другой стороны, не является одним из коммерческих проектов Boston Dynamics. Компания описывает его как «исследовательскую платформу».
Это не потому, что человекоподобные двуногие роботы бесполезны с коммерческой точки зрения. Мы, люди, спроектировали наши дома, города, фабрики, офисы и объекты так, чтобы они соответствовали нашему телосложению. Двуногий робот, который мог бы ходить по поверхности и обращаться с предметами, как это делаем мы, может иметь неограниченную полезность и стать одной из — если не , то — самых прибыльных возможностей для бизнеса в индустрии робототехники. Это будет иметь большое преимущество перед нынешними мобильными роботами, которые ограничены определенными средами (ровная площадка, равномерное освещение, объекты с плоскими сторонами и т. д.) или требуют изменения своей среды, чтобы приспособиться к их ограничениям.
Мы, люди, спроектировали наши дома, города, фабрики, офисы и объекты так, чтобы они соответствовали нашему телосложению. Двуногий робот, который мог бы ходить по поверхности и обращаться с предметами, как это делаем мы, может иметь неограниченную полезность и стать одной из — если не , то — самых прибыльных возможностей для бизнеса в индустрии робототехники. Это будет иметь большое преимущество перед нынешними мобильными роботами, которые ограничены определенными средами (ровная площадка, равномерное освещение, объекты с плоскими сторонами и т. д.) или требуют изменения своей среды, чтобы приспособиться к их ограничениям.
Однако и двуногих роботов очень сложно создать. Даже Atlas, который на сегодняшний день является самым продвинутым двуногим роботом, все еще далек от того, чтобы достичь гладкой и разносторонней моторики человека. И взгляд на некоторые неудачи в новом видео Атласа показывает пробел, который еще предстоит заполнить.
Проблемы двуногих роботов
У животных и людей рост и обучение происходят одновременно. Вы учитесь ползать, стоять, ходить, бегать, прыгать и заниматься спортом по мере развития вашего тела и мозга.
Вы учитесь ползать, стоять, ходить, бегать, прыгать и заниматься спортом по мере развития вашего тела и мозга.
Но вырастить роботов невозможно (по крайней мере, в обозримом будущем). Инженеры-робототехники начинают с полностью разработанного робота (который многократно настраивается по мере экспериментов с ним) и должны научить его всем навыкам, необходимым для эффективного использования своего тела. В робототехнике, как и во многих других областях науки, инженеры ищут способы избежать полного воспроизведения природы, сокращая путь, создавая модели и оптимизируя их для достижения целей.
В случае с Atlas инженеры и ученые Boston Dynamics считают, что оптимизация робота для выполнения паркура поможет им достичь всех нюансов двуногой моторики (и создать сенсационные видеоролики, которые набирают миллионы просмотров на YouTube).
Как пишет Boston Dynamics в своем блоге: «Способность робота выполнять сальто назад может никогда не оказаться полезной в коммерческих условиях… Но не требуется большого воображения или специальных знаний, чтобы понять, почему быть полезным для Атласа, чтобы он мог выполнять тот же диапазон движений и физических задач, что и люди. Если роботы в конечном итоге смогут реагировать на окружающую среду с таким же уровнем ловкости, как и средний взрослый человек, диапазон потенциальных приложений будет практически безграничным».
Итак, основная идея заключается в том, что если бы вы могли заставить робота делать сальто назад, прыгать по платформам, перепрыгивать через барьеры и бегать по очень узким дорожкам, вы бы научили его всем остальным базовым движениям и физическим навыкам, которые доступны всем людям. владеть.
Далее в блоге говорится: «Паркур, каким бы узким и специфичным он ни казался, дает команде Atlas прекрасную песочницу для экспериментов с новым поведением. Это деятельность всего тела, которая требует, чтобы Атлас сохранял равновесие в различных ситуациях и плавно переключался между одним поведением и другим».
Эволюция Атласа была просто впечатляющей. Помимо ярких движений, он демонстрирует некоторые очень интересные фундаментальные способности, такие как регулировка баланса при неуклюжей посадке. Согласно Boston Dynamics, инженерам также удалось обобщить поведение Atlas, предоставив ему набор шаблонов поведения, таких как прыжки и прыжки, и позволив ему адаптировать это поведение к новым сценариям, с которыми он сталкивается.
Согласно Boston Dynamics, инженерам также удалось обобщить поведение Atlas, предоставив ему набор шаблонов поведения, таких как прыжки и прыжки, и позволив ему адаптировать это поведение к новым сценариям, с которыми он сталкивается.
Но робот все еще испытывает трудности с некоторыми базовыми навыками, присущими всем приматам. Например, в некоторых случаях Атлас падает лицом вниз, когда пропускает прыжок или теряет равновесие. В таких случаях приматы инстинктивно вытягивают руки, чтобы смягчить удар при падении и защитить голову, шею, глаза и другие жизненно важные части. Мы учимся этим навыкам задолго до того, как начинаем бегать по узким уступам или прыгать по платформам.
Сложная среда, такая как трасса для паркура, помогает обнаруживать и устранять эти проблемы намного быстрее, чем плоская и простая среда.
Симуляция и обучение в реальном мире
Одной из ключевых проблем робототехники является получение опыта в физическом мире. Видео Atlas очень хорошо это демонстрирует. Команда инженеров должна регулярно ремонтировать Атлас после его повреждения. Этот цикл увеличивает затраты и замедляет обучение.
Команда инженеров должна регулярно ремонтировать Атлас после его повреждения. Этот цикл увеличивает затраты и замедляет обучение.
Обучение роботов в физическом также имеет проблему масштаба. Системы искусственного интеллекта, которые управляют движениями роботов, таких как Atlas, требуют огромного количества тренировок, на порядки больше, чем нужно человеку. Проведение Атласа через трассу паркура тысячи раз не масштабируется, потребуются годы обучения и огромные затраты на ремонт и настройку. Конечно, исследовательская группа могла бы сократить время обучения, используя несколько прототипов параллельно на разных треках. Но это значительно увеличило бы расходы и потребовало бы огромных инвестиций в снаряжение и недвижимость.
Инженеры Boston Dynamics должны регулярно ремонтировать Atlas
Альтернативой реальному обучению является симуляционное обучение. Инженеры-программисты создают трехмерные среды, в которых виртуальная версия робота может проходить обучение в очень быстром темпе и без затрат физического мира. Симуляционное обучение стало ключевым компонентом робототехники и беспилотных автомобилей, и существует несколько виртуальных сред для обучения воплощенного ИИ.
Симуляционное обучение стало ключевым компонентом робототехники и беспилотных автомобилей, и существует несколько виртуальных сред для обучения воплощенного ИИ.
Но виртуальные миры — это всего лишь приближение к реальному миру. Они всегда упускают мелкие детали, которые могут оказать существенное влияние, и не устраняют необходимость обучения роботов в физическом мире.
В физическом мире есть некоторые проблемы, которые очень сложно смоделировать в виртуальной среде, такие как соскальзывание с неустойчивого уступа или застревание кончика ноги в расщелине.
Видео Atlas показывает несколько таких случаев. Один примечательный пример имеет место, когда Атлас достигает барьера и его рука перепрыгивает через него. Это простая процедура, которая не требует большой физической силы. Но хотя Атласу это удается, его рука неловко трясется.
«Если бы вы или я перепрыгнули через барьер, мы воспользовались бы определенными свойствами наших тел, которые не были бы переданы роботу», — говорит Скотт Куиндерсма, руководитель группы Atlas. «Например, у робота нет позвоночника или лопаток, поэтому у него не такой диапазон движений, как у нас с вами. У робота также тяжелое туловище и сравнительно слабые суставы рук».
«Например, у робота нет позвоночника или лопаток, поэтому у него не такой диапазон движений, как у нас с вами. У робота также тяжелое туловище и сравнительно слабые суставы рук».
Детали такого рода сложно смоделировать, и они требуют проверки в реальных условиях.
Восприятие роботов
По данным Boston Dynamics, Atlas использует «восприятие» для навигации по миру. На веб-сайте компании говорится, что Atlas использует «датчики глубины для создания облаков точек окружающей среды и обнаружения ее окружения». Это похоже на технологию, используемую в беспилотных автомобилях для обнаружения дорог, объектов и людей в их окружении.
Atlas использует датчики глубины для картографирования своего окружения
Это еще один короткий путь, которым пользуется сообщество ИИ. Человеческое зрение не зависит от датчиков глубины. Мы используем стереозрение, параллаксное движение, интуитивную физику и обратную связь от всех наших сенсорных систем, чтобы создать ментальную карту окружающей среды. Наше восприятие мира не идеально и может быть обмануто, но оно достаточно хорошо, чтобы большую часть времени делать нас отличными навигаторами в физическом мире.
Наше восприятие мира не идеально и может быть обмануто, но оно достаточно хорошо, чтобы большую часть времени делать нас отличными навигаторами в физическом мире.
Будет интересно посмотреть, будет ли достаточно одних только датчиков зрения и глубины, чтобы поставить Atlas на один уровень с человеческой навигацией, или Boston Dynamics разработает более сложную сенсорную систему для своего флагманского робота.
Атласу еще предстоит пройти долгий путь. Во-первых, роботу понадобятся руки, если он будет манипулировать объектами, а это само по себе очень сложная задача. Atlas, вероятно, не станет коммерческим продуктом в ближайшее время, но он предоставляет Boston Dynamics и индустрии робототехники прекрасную платформу для изучения проблем, которые решила природа.
«Мне трудно представить мир через 20 лет, в котором не будет способных мобильных роботов, которые двигаются изящно, надежно и работают вместе с людьми, чтобы обогатить нашу жизнь», — сказал Куиндерсма из Boston Dynamics. «Но мы все еще находимся на ранних этапах создания этого будущего. Я надеюсь, что подобные демонстрации дают небольшое представление о том, что возможно».
«Но мы все еще находимся на ранних этапах создания этого будущего. Я надеюсь, что подобные демонстрации дают небольшое представление о том, что возможно».
Робот Boston Dynamics Atlas занимается паркуром
- В новом вирусном видео два робота Boston Dynamics выполняют маневры паркура.
- Паркур не главное; все дело в том, чтобы довести роботов до предела, чтобы научиться ловкости, подобной человеческой.
- Проведя эти, казалось бы, диковинные испытания с исследовательскими роботами, ученые смогут разработать более практичных коммерческих роботов.
Паркур — это , а не для слабонервных. К счастью, у двух последних чемпионов по фрираннингу вообще нет сердца, потому что они роботы.
В видеоролике на YouTube, опубликованном во вторник, Boston Dynamics — робототехническая компания из Уолтема, штат Массачусетс, известная своими вирусными видеороликами о машинах, выполняющих удивительно человеческие действия, — демонстрирует двух роботов-гуманоидов (оба по имени Атлас), выполняющих прыжки, скачки и сальто назад. необходимо пройти курс паркура.
необходимо пройти курс паркура.
Первый робот прыгает по деревянным пандусам, поднимается по лестнице и прыгает через пропасти шириной в несколько футов между препятствиями, прежде чем второй робот подхватывает программу, бегая по бревну а-ля Симона Байлз. К концу видео роботы прыгают через части трассы, как вы могли бы перепрыгнуть через забор, синхронно выполняют сальто назад и даже отряхивают пыль с плеч, как будто это ничего.
Это зрелище и, конечно, немного жуткое, если подумать слишком тяжело. Но реальный вопрос заключается в следующем: почему дорогие роботы вообще совершают такой опасный подвиг?
«… Гораздо веселее смотреть, как кто-то танцует или занимается паркуром, чем выполнять базовые процедуры тестирования.»
Boston Dynamics признает, что из-за размеров человекоподобных роботов трудно разработать машины с адекватным соотношением прочности к весу, диапазоном движений и физической устойчивостью, необходимыми для выполнения сложных действий.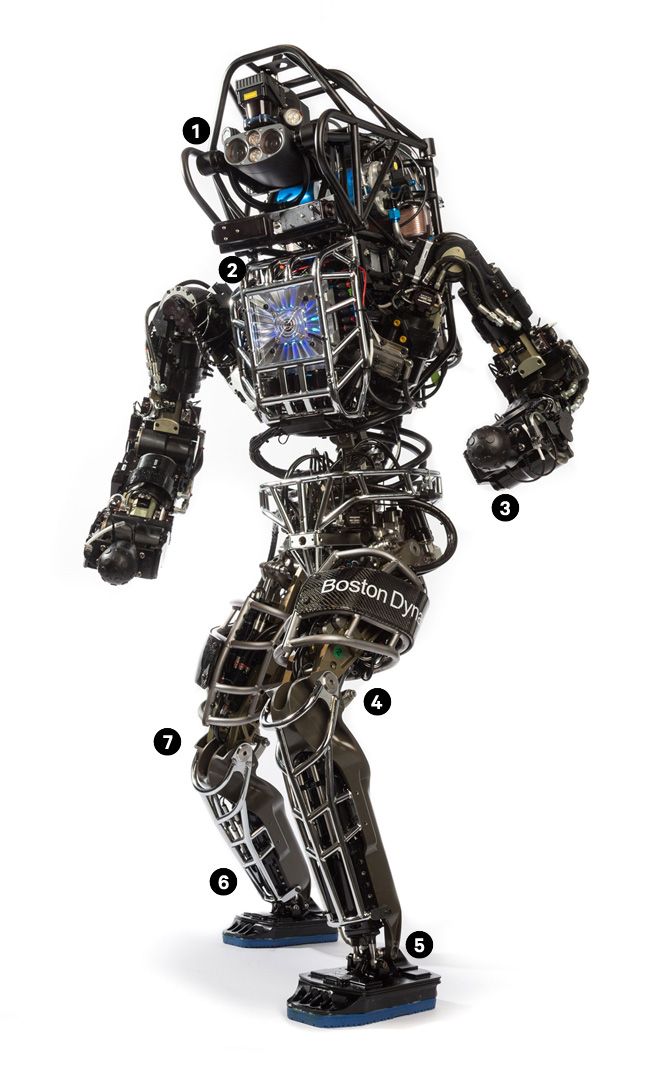 Но опять же, в этом суть. «В конечном счете, расширение возможностей человекоподобного робота, такого как Atlas, стимулирует аппаратные и программные инновации, которые применимы ко всем нашим роботам в Boston Dynamics», — говорится в сообщении компании в блоге от 17 августа.
Но опять же, в этом суть. «В конечном счете, расширение возможностей человекоподобного робота, такого как Atlas, стимулирует аппаратные и программные инновации, которые применимы ко всем нашим роботам в Boston Dynamics», — говорится в сообщении компании в блоге от 17 августа.
Другими словами, суть не в паркуре, а в средстве достижения цели.
Выбор амбициозной «песочницы» (жаргон информатики для пространства, в котором можно что-то протестировать) имеет первостепенное значение в мире робототехники. За пределами симуляций и лаборатории реальный мир представляет препятствия (здесь, в буквальном смысле), которые робот должен быть в состоянии обойти. На самом деле, если вы когда-нибудь захотите, чтобы медицинский робот корректировал курс, когда он бросает лекарства пациенту, или перелезал через ряд упавших деревьев в поисково-спасательной миссии, вам нужно будет протестировать робота в ситуациях, которые гораздо труднее заранее.
➡️Больше невероятных роботов
- Этот «ленивец» может навсегда изменить охрану природы
- Позволит ли физика 60-футовому роботу ходить?
- Этот робот Disney поддерживает зрительный контакт, как профессионал
«Эти усилия сосредоточены на выборе приложения, которое может проверить границы аппаратного обеспечения робота (и связанных с ним алгоритмов управления), но при этом представлять интерес для команды робототехники, Об этом сообщила Аянна Ховард, декан инженерного факультета Инженерного колледжа Университета штата Огайо. 0019 Popular Mechanics в электронном письме. В своей работе Ховард выбрала танец роботов «как форму эмоционального выражения и взаимодействия».
0019 Popular Mechanics в электронном письме. В своей работе Ховард выбрала танец роботов «как форму эмоционального выражения и взаимодействия».
Мишель Розен, доцент кафедры машиностроения в The Cooper Union в Нью-Йорке, соглашается. «Это хороший испытательный полигон для самой технологии. Это испытательный стенд, где они могут тщательно оценить свои алгоритмы и поведение цепочки вместе», — сказал Розен Popular Mechanics в электронном письме. «Кроме того, гораздо веселее смотреть, как что-то танцует или занимается паркуром, чем наблюдать, как оно выполняет базовые процедуры тестирования. Подобные вещи также доставляют массу удовольствия ученым!»
Посмотреть полный пост на Youtube
И, возможно, что более важно, эти процедуры тестирования могут дать информацию для следующего поколения роботов, сказал Розен. «Конечная цель, как я себе это представляю, — это робот, который может делать любые произвольные движения, которые могли бы делать вы или я (или, может быть, Симона Байлз)», — объяснила она. «Алгоритмы и процессы, которые работают в Atlas, имеют широкое применение в этой области, а не только в гуманоидной робототехнике. Многие достижения в алгоритмах управления и динамическом моделировании стали результатом исследований, проведенных Boston Dynamics».
«Алгоритмы и процессы, которые работают в Atlas, имеют широкое применение в этой области, а не только в гуманоидной робототехнике. Многие достижения в алгоритмах управления и динамическом моделировании стали результатом исследований, проведенных Boston Dynamics».
Прежде всего, чтобы реализовать трюки с паркуром, Boston Dynamics использовала тип программирования, аналогичный «архитектуре управления, основанной на поведении», — сказал Ховард. В этом процессе вы должны активно программировать определенное поведение («о котором вы можете думать как о модулях»), которые робот будет приводить в действие на основе таких факторов, как его восприятие близлежащей среды, текущее состояние его суставов или следующее. задача, которую он должен выполнять в последовательности.
«В зависимости от входных данных робот будет выбирать из набора сохраненных вариантов поведения для определения своего следующего действия/поведения», — объяснила она. Итак, Atlas не является на 100% автономным — не нужно бояться, что он придет к вам домой, чтобы бросить вам вызов своими нездоровыми движениями. Он запрограммирован только на выполнение определенных движений в определенных областях.
Он запрограммирован только на выполнение определенных движений в определенных областях.
➡️Обязательные к прочтению истории Boston Dynamics
- Робот-собака Boston Dynamics присоединяется к отряду саперов
- Найди, как робот-собака соблюдает социальное дистанцирование
- Вы все еще можете купить свою собственную робото-собаку … за 74 500 долларов
- Статический против. Динамическая ходьба
- Как робот решил, куда идти?
- Планирование шагов.
- COM Планирование траектории.
- Создание совместных крутящих моментов.
- Управление гидравликой.
- Оценка состояния.
- Чем отличаются прогулки?
- Есть ли различия в том, как использовались датчики?
- Как контролировали оружие?
- Как производилась манипуляция?
3, 90 проверка даже этих очень специфических границ означает совершение ошибок. В Boston Dynamics заявили, что Atlas достигает прыжковой части производительности паркура, например, примерно в половине случаев. Но, конечно же, делать что-то более практичное, например, раздавать таблетки, было бы проще для такого рода роботов, верно?
Не совсем так, сказал Говард. «Движения паркура более продвинуты, но манипулирование объектами в реальном мире (например, взятие случайной бутылочки с таблетками, расположенной в случайном порядке, расположенной в медицинском учреждении, при навигации в среде, полной людей), я бы сказал. по-прежнему такая же сложная проблема (если не сложнее, поскольку вы имеете дело с динамической природой реальной среды и поведением людей)».
по-прежнему такая же сложная проблема (если не сложнее, поскольку вы имеете дело с динамической природой реальной среды и поведением людей)».
Итак, даже если вы не можете сделать сальто назад, вы, вероятно, можете сделать больше, чем даже самый крутой робот в Интернете.
🎥 Смотрите сейчас:
Кортни ЛиндерЗаместитель редактора
До прихода в Pop Mech Кортни работала репортером по технологиям в газете своего родного города Pittsburgh Post-Gazette. Она выпускница Университета Питтсбурга, где изучала английский язык и экономику. Ее любимые темы включают, помимо прочего, гигантский кальмар, панк-рок и робототехнику. Она живет в пригороде Филадельфии со своим партнером, своей черной кошкой и башнями из книг.
Сравнение контроллеров роботов Atlas
Сравнение контроллеров роботов Atlas
IHMC, MIT и WPI-CMU
На этой веб-странице описаны подходы к управлению роботом Atlas.
от Boston Dynamics в DARPA Robotics Challenge, используемой
команды из IHMC, MIT и WPI-CMU. Эти
подходы схожи, поэтому нас интересует, как именно они
похожи и чем отличаются.
Основным элементом, общим для всех трех подходов, является использование
Квадратичное программирование (QP) для вычисления желаемых ускорений и
контактные усилия на каждом такте контроллера.
На этом семинаре есть несколько выступлений (на видео), относящихся к этим контроллерам.
Этот специальный выпуск журнала Field Robotics
есть работы из всех 3-х групп.
Компоненты и проблемы
ИХМК
Веб-страница,
Видео,
и документы
Джеспер Смит (IHMC), Сильвен Бертран (IHMC), Питер Нойхаус (IHMC), Мэтью Джонсон (IHMC), Джерри Пратт (IHMC) и команда IHMC,
«Структура управления всем телом на основе импульса — приложение к роботам-гуманоидам Atlas и Valkyrie», выступление на семинаре IROS 2014.
Что случилось в ДРК?
Атлас идет по неровной земле
Атлас ходьба
Экстремальная балансировка Atlas
Массачусетский технологический институт
Веб-страница,
Видео,
и документы
Что случилось в ДРК?
Атлас толкают и [2]
Выходной тест устойчивости
Прогулка по местности
Быстрая ходьба по квартире
Команда WPI-CMU DRC (робот в WPI)
Видео, выступления и документы
Что случилось в ДРК?
Атлас ходьба
Бостон Дайнэмикс
Рано
версия Атласа, идущего по препятствиям.
Мы понятия не имеем, как Boston Dynamics контролирует Atlas.
DRC уделял особое внимание минимизации риска и точной постановке ног.
Был стимул ехать быстро. Однако жесткий предел был
час на выполнение 8 заданий.
Следовательно, ходьба была относительно медленной и статичной.
Контроллеры были разработаны, чтобы помещать каждый шаг в цель.
Изменение желаемого положения стопы во время маха ногой
в ответ на ошибки не было сделано IHMC, MIT или WPI-CMU.
Однако наши алгоритмы оптимизации можно использовать для обхода
намного быстрее (см. видео выше) и варьироваться
шаги в ответ на ошибки. Места будущих шагов могут
просто стать частью набора переменных, которые оптимизируются
в выборе траекторий шагов и центра масс.
ВСЕ: Оператор указывает положение и ориентацию или объект, к которому нужно пройти.
ИХМК
Оператор выбрал шаги.
Лестница:
Пятки с лестницы, Руки подвернуты, Торс учится вперед.
Массачусетский технологический институт
Плоская поверхность: решить задачу оптимизации, которая вычисляет количество и расположение шагов с учетом различных ограничений (максимальный шаг вперед/в сторону, рыскание стопы и т. д.)
Рельеф: используйте восприятие для определения блоков в лидарных данных. Обновите подгонку блоков, используя библиотеку шаблонов наклонных блоков.
Лестницы: используйте восприятие, чтобы подогнать ступени, спланируйте шаги относительно подходящих ступеней. Пятки с лестницы, руки вперед, туловище относительно прямо вверх.
ВПИ-КМУ
Что мы хотели: Поиск A*, включая динамику и риск в критериях.
В. Хуанг, Дж. Ким и К. Г. Аткесон, Оптимальное планирование шагов на основе энергии для гуманоидов, ICRA, 2013 г.
Что мы сделали:
Различные планировщики шага реализованы для
разные сценарии. В большинстве случаев ходьбы по ровной поверхности мы
используйте планировщик на основе A*, который использует набор действий из более
агрессивные шаги. Планировщики на основе интерполяции также
Планировщики на основе интерполяции также
реализовано. Мы полагаемся на их повторяемость для определенных задач,
например, пройти в открытую дверь. Спец. Назначение
планировщики реализованы для задач рельефа и лестницы.
Лестница:
Растопыренная ступня полностью на лестнице. Руки скрещены. Туловище учится вперед.
ИХМК
Захватите точку за N шагов. N = 3 или 4.
Массачусетский технологический институт
Не вычислял траекторию COM явно. Запланирована траектория ZMP w.r.t. пошаговые цели, используйте TV-LQR для вычисления оптимальной стоимости перехода в состояние COM и ускорения.
WPI-CMU
Оптимизация траектории (DDP) для остановки за N шагов, N = 2 в DRC, N = 3 для более быстрой ходьбы. LQR обеспечивает функцию терминального значения. ЛИПМ + З.
Квадратный штраф за отклонение от желаемой траектории COP.
Перепланируйте каждый шаг.
Все делают QP, чтобы найти ускорение и контактные силы.
Затем вычислите крутящие моменты с помощью обратной динамики.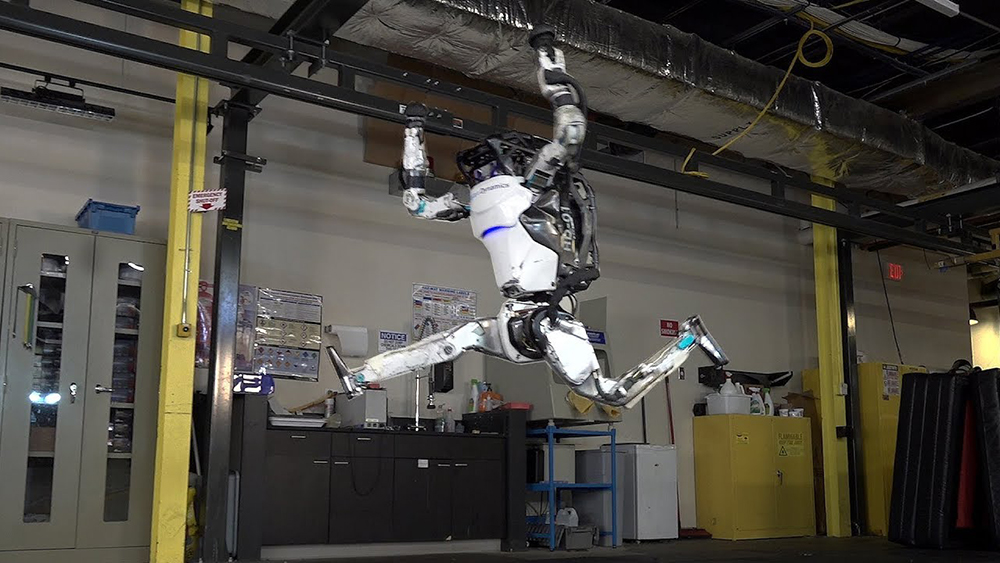
ИХМК
Центральный импульс не вычисляет матрицу масс.
CVXGEN
Рекурсивный метод Ньютона-Эйлера для нахождения крутящих моментов.
Массачусетский технологический институт
Предположим, что активные ограничения неравенства меняются редко, особенно
case обрабатывает активные изменения ограничений.
Возврат к Gurobi, если самодельный решатель не может решить за N = 15 итераций.
Сделайте нижнюю половину уравнений движения.
ВПИ-КМУ
Использование QuadProg без особых ухищрений.
Используйте взвешенные ограничения, а не приоритетную иерархию ограничений.
Используйте функцию значения из DDP.
Сглаживание структурных изменений в QP.
Используйте расчетную ошибку моделирования COM.
ИХМК
Исправлена кинематика с моделями деформации звеньев.
Компенсация люфта.
Сами регулировали клапана.
Массачусетский технологический институт
Нога приобретает ту же форму, что и WPI-CMU
Усиление рук имеет компенсацию трения и гравитации (не используется в финалах DRC).
ВПИ-КМУ
Используйте контроллер обратной связи низкого уровня BDI. Усиления настраиваются вручную и глобально постоянны в координатах привода. Используйте наши собственные конструкции фильтров 2-го порядка.
Исключение: качание лодыжки и усиление стойки различаются.
Аналогичная оценка таза (модель LIPM)
ИХМК
Компенсация люфта по скорости соединения
Массачусетский технологический институт
Включите LIDAR (но не в DRC).
ВПИ-КМУ
Фильтр Калмана с использованием модели процесса LIPM.
Оцените внешнее усилие/смещение COM
ИХМК
Топать, 2с/шаг, 1с СС, 1с ПС
Массачусетский технологический институт
Явно не применяла плавность переходов контактов. Иногда приводило к сильным ударам.
ВПИ-КМУ
Нежный шаг.
4с/шаг, 2с СС, 2с СН.
Вопросы
Мягкие приземления облегчают или усложняют ходьбу?
Сколько у нас соответствия?
ИХМК
COP, используемый при оценке состояния
Массачусетский технологический институт
Датчик стопы, используемый в качестве бинарного контактного датчика
WPI-CMU
COP, используемый при оценке состояния
История обратной связи состояния и вывода.