Квадрокоптер своими руками из подручных материалов. Как сделать своими руками дрона
Как сделать Дрон своими руками
Понадобится для сборки Дрона
А также: палочки от мороженного, пистолет с горячим клеем, паяльник с припоем и флюсом.Подробнее о деталях для сборки квадрокоптера
Пульт с приемником для дистанционного управления можно позаимствовать из игрушки, к примеру из сломанной машинки или купить - Али Экспресс. Главным условием должно быть то, чтобы вся электроника исправно работала от напряжения 3,7 В.
 Мини двигатели для летающих моделей можно купить - Али Экспресс.
Мини двигатели для летающих моделей можно купить - Али Экспресс.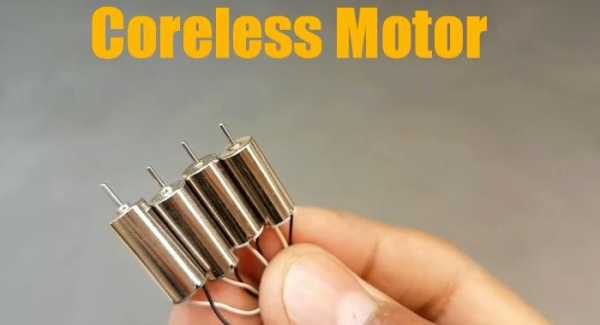 Пропеллеры так же придется приобрести - Али Экспресс. Они должны подходить к двигателям. Так что лучше их взять вообще комплектом - тут на Али.
Пропеллеры так же придется приобрести - Али Экспресс. Они должны подходить к двигателям. Так что лучше их взять вообще комплектом - тут на Али.
Изготовление Дрона - квадрокоптера
Итак, первым делом соберем такую решетку из четырех палочек для мороженного. Фиксируем все горячий клей. Это будет основная рама нашего мини квадрокоптера.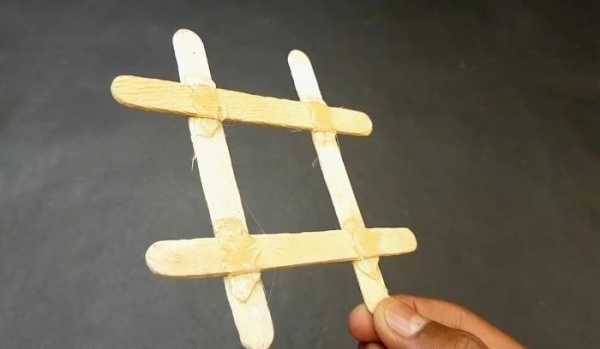 Аккумулятор приклеиваем таким же способом к раме.
Аккумулятор приклеиваем таким же способом к раме.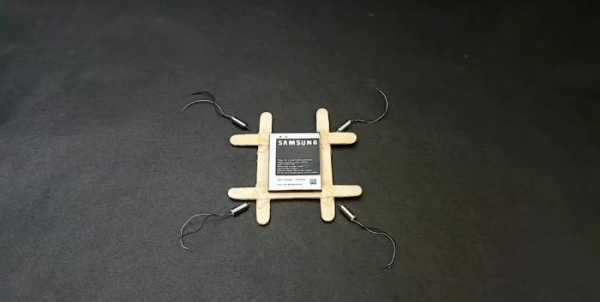 Приклеиваем четыре двигателя с пропеллерами в углы решетки.
Приклеиваем четыре двигателя с пропеллерами в углы решетки. Теперь нужно сделать ножки, на которых будет стоять дрон. Разрежем две палочки от мороженного пополам.
Теперь нужно сделать ножки, на которых будет стоять дрон. Разрежем две палочки от мороженного пополам.
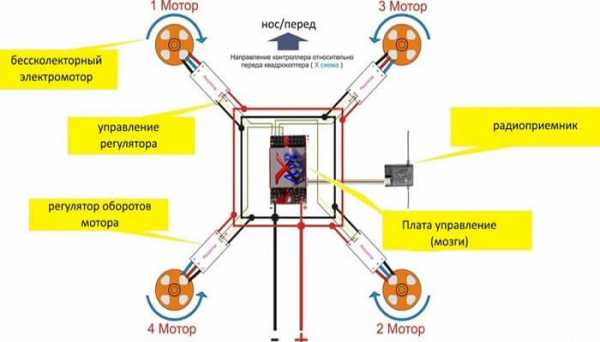
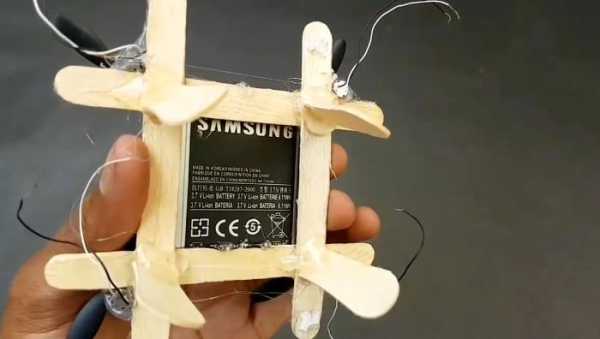 Добавляем приемную плату ДУ. Вывода всех двигателей соединим параллельно.
Добавляем приемную плату ДУ. Вывода всех двигателей соединим параллельно.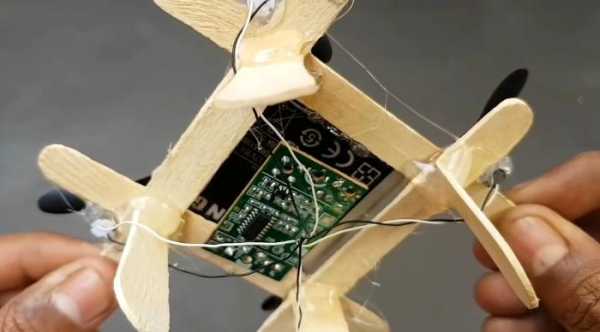 Подключаем провода двигателей к выходу платы ДУ.
Подключаем провода двигателей к выходу платы ДУ.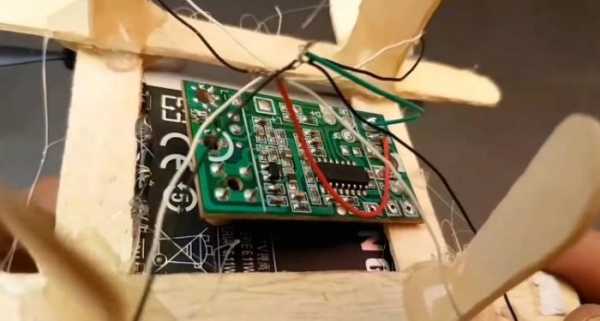 Подключаемся к аккумуляторной батареи.
Подключаемся к аккумуляторной батареи.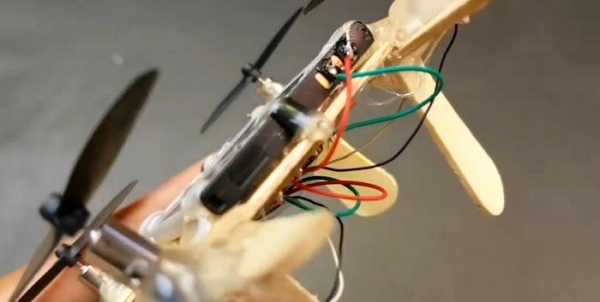 Проверка. Удерживаем дрон от подъема и нажимаем на кнопку пульта ДУ. Если пропеллеры всех четырех двигателей закрутились - все работает исправно.
Проверка. Удерживаем дрон от подъема и нажимаем на кнопку пульта ДУ. Если пропеллеры всех четырех двигателей закрутились - все работает исправно.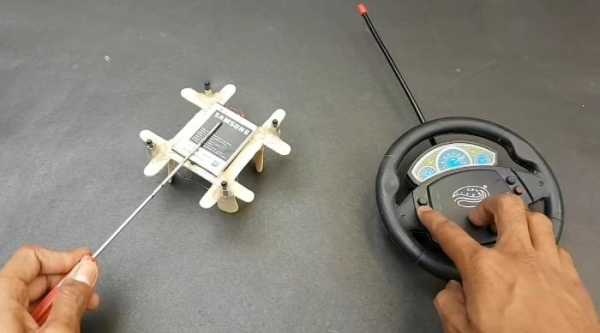 Выходим на открытую местность, ставим наш квадрокоптер и проверяем работу. Дрон должен взлететь в верх без особых проблем.
Выходим на открытую местность, ставим наш квадрокоптер и проверяем работу. Дрон должен взлететь в верх без особых проблем. Если пропеллеры закрутились, а конструкция не взлетела, проверьте уровень заряда аккумулятора. Если все в норме, нужно облегчить конструкцию. В принципе, мощности таких четырех мотором должно хватить с запасом.Во время постройки рекомендую как можно больше экономить общий вес, чтобы дрон был максимально легок. Так что лейте меньше клея, отрезайте максимально короткие провода и т.п.
Если пропеллеры закрутились, а конструкция не взлетела, проверьте уровень заряда аккумулятора. Если все в норме, нужно облегчить конструкцию. В принципе, мощности таких четырех мотором должно хватить с запасом.Во время постройки рекомендую как можно больше экономить общий вес, чтобы дрон был максимально легок. Так что лейте меньше клея, отрезайте максимально короткие провода и т.п.
Смотрите видео
Более подробную инструкцию по сборке игрушки смотрите в видео. sdelaysam-svoimirukami.ru
Дрон своими руками - АвиаДрон
Как построить дрон? Как сделать квадрокоптер своими руками? Часть 1
Ну что друзья хватит читать про дроны и пускать слюни на красивые картинки и потрясное видео снятое дорогущими коптерами. Мы с вами тоже кое что можем, даже если не заработали на летающих монстров. Давайте построим себе продвинутый и маневренный, многофункциональный квадрокоптер. Для этого не заморачиваясь на суперсложности возьмем и соберем авиа дрон из готового китайского набора.
Это будет квадрокоптер на раме 450 с полётным контроллером APM (Arducopter). В комплект кита входит:
 рама рама коптера из двух площадок
рама рама коптера из двух площадок- четыре несущих луча для двигателей
- четыре двигателя,
- четыре контроллера управления двигателями,
- комплект пропеллеров,
- GPS контроллер
- GPS антенна
- Полетный контроллер
- Крепеж для сборки
В видеоролике вы найдете подробнейшую видео-инструкцию по сборке квадрокоптера и подключению электроники. Советы и рекомендации по выбору источников питания и дополнительного оборудования. Автор подготовил для вас подробное и наглядное пособие по первоначальной прошивке и настройке контроллера управляющего коптером APM.В частности очень подробно описан весь процесс настройки и калибровки APM, от калибровки самого АРМ до настроект пульта управления коптером. В качестве пульта управления автор предлагает взять надежный и проверенный FlySky i6. Видео полностью охватывает весь процесс сборки и настройки квадрокоптера с камерой, своими руками с нуля от распаковки кита до первого полёта!
Для удобства ниже вы найдете все ссылки для покупки КИТа и всех необходимых комплектующих
Основной набор комплектующих для сборки коптера
Скидки от 10.5% до 30% на покупки с Aliexpress!
Продолжение…
450sobratдронкиткоптернедорогорамарукамисвоими
Похожие сообщения
aviadron.ru
Квадрокоптер своими руками из подручных материалов. — Паркфлаер
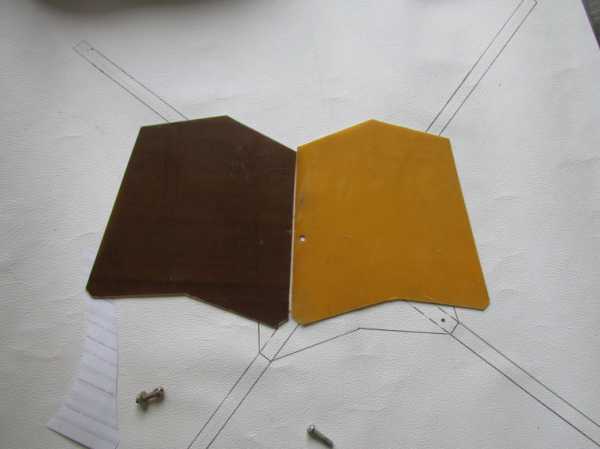
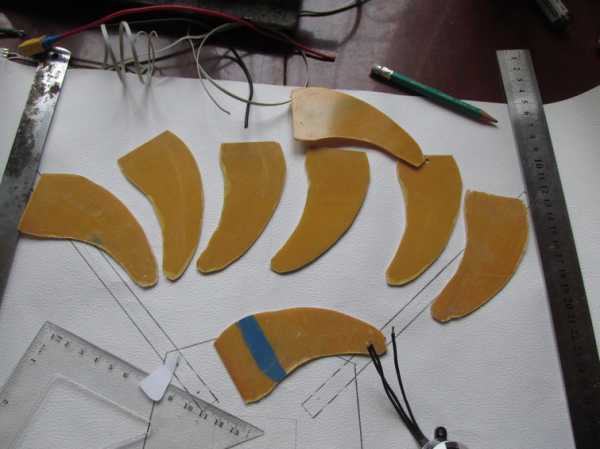
 Сначала, подобрав размер квадра, приступил к зарисовке чертежа на куске обоев. Кстати, размер выбрал 45 - универсальный, так как это мой первый дрон, и в каком направлении буду развиваться пока не знаю.
Сначала, подобрав размер квадра, приступил к зарисовке чертежа на куске обоев. Кстати, размер выбрал 45 - универсальный, так как это мой первый дрон, и в каком направлении буду развиваться пока не знаю. Собрав дома весь стеклотекстолит, приступил к выпиливанию двух одинаковых основ, между которыми будут зажаты лучи.
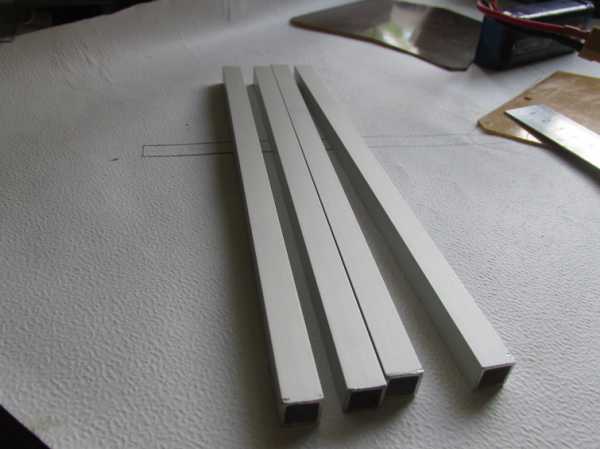
 Материалом для изготовления лучей послужил алюминиевий квадратный профиль 10*10мм
Материалом для изготовления лучей послужил алюминиевий квадратный профиль 10*10мм
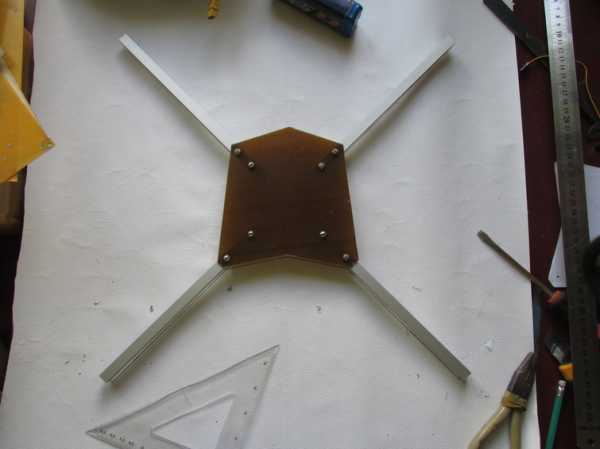
 Предварительная версия...
Предварительная версия... Крепил лучи между основами с помощью винтов и гаек, ничего другого не придумал)
Крепил лучи между основами с помощью винтов и гаек, ничего другого не придумал)
 Идём далее...Ноги, шасси делал также из стеклотекстолита. Нарисовав эскиз, приступил к нарезке заготовок
Идём далее...Ноги, шасси делал также из стеклотекстолита. Нарисовав эскиз, приступил к нарезке заготовок
 После чего приступил к мучению шуруповёрта
После чего приступил к мучению шуруповёрта Несмотря ни на что, дрон всё-таки встал на свои ноги)
Несмотря ни на что, дрон всё-таки встал на свои ноги)
 А теперь - взвешивание. Вес рамы, без какого-либо оборудования, составил 263 грамма. Я думаю что это достаточно приемлемый вес, а что думаете вы?
А теперь - взвешивание. Вес рамы, без какого-либо оборудования, составил 263 грамма. Я думаю что это достаточно приемлемый вес, а что думаете вы?
Теперь, когда рама собрана, можно приступить к установке комплектующих.Моторы и регули я выбрал эти:  EMAX XA2212 820KV 980KV 1400KV Motor With Simonk 20A ESC Товар http://www.parkflyer.ru/ru/product/1669970/
Мозг, всем известный cc3d CC3D Flight Controller Товар http://www.parkflyer.ru/ru/product/1531419/
Батарея: Аккумулятор литий-полимерный ZIPPY Flightmax 3000mAh 3S1P 20C Товар http://www.parkflyer.ru/ru/product/8851/
Моторы со штатными крестиками крепил к лучам на болты и гайки
EMAX XA2212 820KV 980KV 1400KV Motor With Simonk 20A ESC Товар http://www.parkflyer.ru/ru/product/1669970/
Мозг, всем известный cc3d CC3D Flight Controller Товар http://www.parkflyer.ru/ru/product/1531419/
Батарея: Аккумулятор литий-полимерный ZIPPY Flightmax 3000mAh 3S1P 20C Товар http://www.parkflyer.ru/ru/product/8851/
Моторы со штатными крестиками крепил к лучам на болты и гайки 

 Моторы установлены. Регуляторы примотал на изоленту, радиаторами к лучам.
Моторы установлены. Регуляторы примотал на изоленту, радиаторами к лучам.

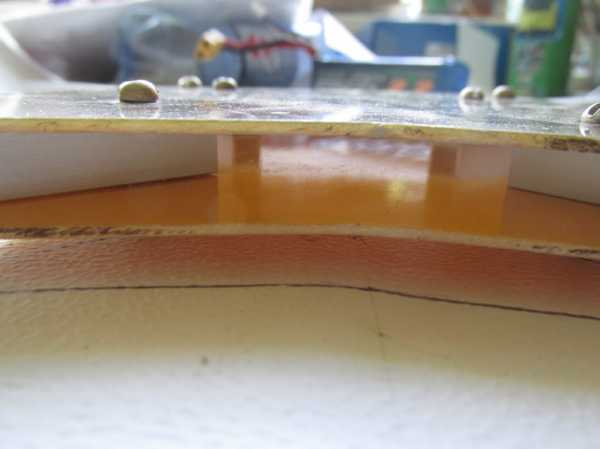
 Затем плату распределения питания разместил между пластинами стеклотекстолита
Затем плату распределения питания разместил между пластинами стеклотекстолита Припаял все нужные провода (регуляторов, габаритных огней). Перфекционистам не смотреть))) Проверил работоспособность... Установив плату распределения питания, приступил к монтажу мозгов. Банально прилепил их на 2-х сторонний скотч. Также поступил с приемником Крепление батареи осуществляется благодаря липучкам на нижней основе квадра. Вот и всё! Полётный вес квадрокоптера - 993 грамма. Прошив полётный контроллер, пошёл на улицу на первые испытания.
Вот и всё! Полётный вес квадрокоптера - 993 грамма. Прошив полётный контроллер, пошёл на улицу на первые испытания.
Видео полётов смотрите с 2.50 минуты
Спасибо всем кто читал выше изложенное, если есть вопросы, советы, пожелания - пишите в комментариях. Ниже представлены фотографии сделанные камерой, установленной на квадрокоптере, ну и сам коптер.
С Ув. Алексей












www.parkflyer.ru
Квадрокоптер своими руками

Первый квадрокоптер, как известно, появился в 2006 году. Собрали дрон германские разработчики Бускер и Бусс, причем сделали это сами. И началось: многие инженеры по всему миру загорелись идеей создания собственных моделей квадрокоптера. Есть такие умельцы и сегодня. Хотите собрать свой квадрокоптер и вы. А иначе стали бы читать сейчас этот материал?
Рекомендуем почитать: из чего состоит квадрокоптер
С чего же начать чтоб сделать квадрокоптер своими руками?
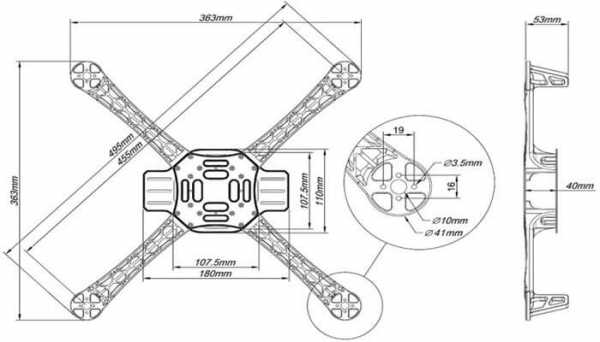
1. Рама. Ее можно сделать без особого труда из пластиковых труб небольшого диаметра, используемых в прокладывании канализационных и иных коммуникаций. Можно изготовить раму из куска фанеры. Понадобится квадрат 110 на 110 мм. Кроме того, потребуется алюминиевый профиль (квадратный). Лучи (длиной по 495 мм) прикрепляются винтами по обеим диагоналям получившегося квадрата. Возможна покупка готовой рамы (рис. снизу).\

Из алюминия невысокого профиля можно сделать посадочные «лыжи» коптера. Из него же можно соорудить держатель для аккумулятора.
2. Далее потребуются аппаратура, допустим Turnigy 9XR, управляющая плата и аккумулятор для аппаратуры. Плюсом к тому необходимо приобрести силовой Li — Po аккумулятор (для самого квадрокоптера), пропеллеры, устройство для подзарядки аккумуляторов.

3. Первым делом устанавливается управляющая плата – в центральную часть платформы из получившегося куска фанеры или карбона. Делается это в пазы, непосредственно просверленные в алюминиевой основе через фанеру.
4. Рядом с платой устанавливается приемник (можете сделать это при помощи суперклея). Далее сверлятся отверстия для крепления двигателя. При этом нужно учитывать, чтобы расстояние от края до оси во всех четырех случаях было равным.

5. Затем необходимо сделать «паука» из проводов – от регуляторов скорости. Проводку требуется соединить параллельно с помощью соответствующих переходников. Разъемы при этом можно использовать в том месте, в котором подключается аккумулятор к «пауку».
6. Все требуется спаять, сделать термоусадку, подключить провода (сигнальные). Для начинающих это будет большой проблемой.
7. Можно тестировать получившийся квадрокоптер.Умельцы, которым уже доводилось успешно собирать квадрокоптеры, советуют не экономить на комплектующих. Особенно важным это замечание является сейчас, когда на рынке представлено немало различных микроприборов, в том числе контроллеров и датчиков. Каждый может использоваться при собственноручном производстве дрона, но не каждый может оправдать ожидания разработчика.
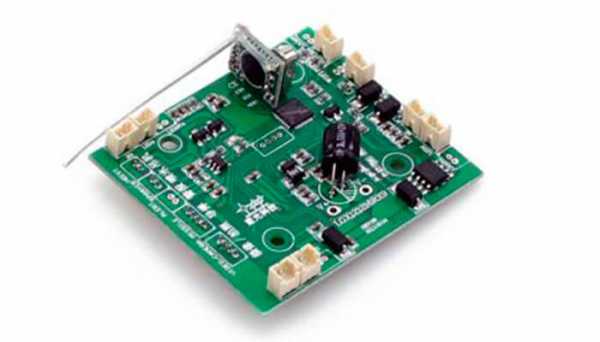
Самый простой вариант – приобрести готовую плату с уже установленными датчиками (гироскопом, акселерометром, барометром, магнитометром).
Для чего они нужны?
Гироскоп необходим для контроля углового ускорения, акселерометр замеряет гравитацию, барометр отвечает за набранную высоту, а магнитометр – за направление движения. Сегодня на рынке представлены платы, в которых есть также и GPS-принимающие.
Советы
Перед сборкой квадрокоптера своими руками советуем ознакомиться с советами профессионалов (тех, кто не раз делал дроны сам), ведь для начинающих это будет не так уж и просто:
- Первый «дрон» не должен быть с камерой для фото- или видеосъемки, он – ваша первая работа, задача которой – взлететь, уверенно держаться в создухе и не сломаться при первом же полете;
- Не гонитесь за масштабами. Лучше построить менее крупный и громоздкий, но рабочий квадрокоптер;
- Старайтесь использовать минимум соединений и дополнительных элементов. Множество датчиков и контроллеров оправдано далеко не во всех случаях,
- Если вы все же решились сделать квадрокоптер своими руками с камерой, то знайте, что для высокого качества картинки потребуется основание более крупных размеров. «Усадить» её на устройство намного сложнее, да и в целом конструкция с ним становится менее устойчивой и крепкой.
Если у вас нет времени на сборку или просто терпения, советуем почитать как сэкономить и где выгоднее купить квадрокоптер.
Будем благодарны Вам, если поделитесь с друзьями:
mykvadrocopter.ru
Гоночный FPV-дрон своими руками (часть 1) — сборка / Хабр

Полностью процесс сборки и настройки я описал тут и тут, а ниже будет немного изменённая версия, содержащая больше информации из моих предыдущих статей.
Я оставлю за скобками вопрос вхождения в данное хобби и перейду непосредственно к квадрокоптеру.
Выбор размера квадрокоптера
Год назад наибольшей популярностью пользовались квадрокоптеры 250-го размера. Но сейчас пилоты предпочитают собирать аппараты меньшего размера, что весьма разумно: вес меньше, а мощность та же. Я выбрал 180-й размер не из каких-то практических причин, а как некий челлендж по сборке.
На самом деле, такой подход к выбору не совсем правилен. Гораздо разумнее выбирать сначала размер пропеллеров, а уже под них — наименьшую раму, куда влезут выбранные пропеллеры. И при таком подходе 180-й формат вообще отбраковывается. Судите сами: 210-й формат позволяет ставить те же 5-дюймовые пропеллеры, что 250-й, при этом сам квадрик получается легче, а 4-дюймовые пропеллеры влезают и в 160-е рамы. Получается, что 180-й размер — это такой промежуточный формат, который «ни нашим, ни вашим». Его также можно считать утяжелённым 160-м. Но, тем не менее я выбрал именно его. Возможно потому, что это минимальный размер, способный более-менее комфортно тягать камеру GoPro или Runcam.
Комплектующие
Начнём с моторов. «Промежуточность» 180-го размера, а также богатство их ассортимента, осложняют выбор. С одной стороны, можно брать то, что идёт на 160-е, с другой — то, что устанавливают на 210-е или даже 250-е. Исходить надо из пропеллеров и батареи (количество банок). Не вижу смысла использовать батарею 3S, а по пропеллерам общие правила таковы:
- нужна максимальная статическая тяга — увеличивай диаметр пропеллера и уменьшай шаг (в разумных пределах)
- нужна высокая скорость — уменьшай диаметр и увеличивай шаг (в разумных пределах)
- нужна высокая тяга при маленьком диаметре — добавляй количество лопастей (опять же в разумных пределах, так как если разница между двух- и трёхлопастными пропеллерами ощутимая, то между трёх- и четырёхлопастными — не такая большая)
В моём случае я имею ограничение размера пропеллеров в 4 дюйма, но не имею ограничения по моторам. Значит, разумнее всего будет использовать трёхлопастные 4045 пропеллеры bullnose. Их сложно балансировать, но с ними управление отзывчевее и предсказуемее, а звук тише. С другой стороны, с двухлопастными пропеллерами скорость у квадрокоптера выше, но мне этого точно не надо. «В народе» на 180-х рамах преобладают следующие сетапы:
- лёгкий с моторами 1306-3100KV, обычными 4045 пропеллерами и батареей 850mAh
- тяжёлый и мощный под трёхлопастные bullnose пропеллеры и экшн-камеру с моторами 2205-2600KV и батареей 1300mAh
На самом же деле, рама позволяет ставить моторы от 1306-4000KV до 22XX-2700KV. Кстати, не знаю почему, но моторы 1806-2300KV сейчас в опале и мало используются.
Для своего квадрика моторы я взял — RCX h3205 2633KV. Во-первых, хотелось иметь запас по мощности (хотя с моими скромными навыками пилотирования, непонятно зачем). Во-вторых, мои сетапы никогда не получались сверхлёгкими, вдобавок я ещё и экшн-камеру таскать планирую. Конкретно моторы RCX — вариант компромиссный. Они дёшевы, но и нареканий по качеству много. На момент покупки комплектующих это были одни из немногих моторов 2205-2600KV на рынке. Сейчас (на момент написания статьи) ассортимент значительно больше и лучше выбрать что-нибудь другое. С остальными комплектующими действовал по принципу «больше челленджа»:
- Рама RC180 V2. Недорогая (брендовые аналоги в 2-3 раза дороже), лёгкая, с хорошей компановкой и нижней пластиной 3мм. К сожалению, отдельно запчастей к ней не купить, но, учитывая цену всей рамы, вполне можно купить 1-2 комплекта на запчасти.
- Приёмник FrSky D4R-II. Поначалу хотелось попробовать FrSky X4R-SB, но в этом случае пришлось бы менять модуль на передатчике, а этого делать совсем не хотелось. Забегая вперёд скажу, что разумнее брать версию приёмника без припаянных разъёмов. У себя я всё равно их отпаял.
- Регуляторы FVT LittleBee 20A — недорогие и проверенные, но сейчас уже устаревшие. Когда я их покупал только-только появились в продаже FVT LittleBee 20A PRO на чипе Silabs F396 (та версия, что у меня использует чип Silabs F330), а на момент написания статьи уже принимались предзаказы на FVT LittleBee 20A-S, заточенные под BLHeli_S. Здесь можно почитать о технических стороне регуляторов LittleBee 20A.
- Видеопередатчик Foxeer FX799T — компактный, популярный и с микрофоном.
- Камера Sony Super HAD CCD 600TVL (IR Block, NTSC, объектив 2.8). Можно было и Foxeer XAT600M, но мне нужна без корпуса.
- Держатель камеры Diatone.
- Антенна-«клевер» BeeRotor и кабель-удлинитель.
- MICRO MinimOSD.
- В комплекте с рамой уже есть плата распределения питания, но я не хочу её использовать. Поэтому заказал Matek Mini Power Hub, она намного удобнее. Кстати, при использовании батарей 3S, эта PBD издаёт громкий свист и это никак не лечится.
- Несколько батарей Turnigy nano-tech 1300mAh 4S 45~90C.
- Подсветка с пищалкой ZG 12Bit WS2812B LED Board. Позднее выяснилось, что пищалка либо не работает, либо есть какие-то неизвестные (никакой документации не прилагалось) нюансы в подключении. В итоге поставил другую.
- Несколько комплектов пропеллеров DYS 3-blade 4040 Bullnose.
Выбор полётного контроллера
Вы наверное заметили, что в списке нет полётного контроллера. Хочу описать его выбор подробнее. В недорогие наборы для сборки часто включают контроллер CC3D, так сейчас это, пожалуй, самый дешёвый ПК. Сегодня нет совершенно никакого смысла покупать CC3D. Он устарел и не имеет таких необходимых вещей, как контроль заряда батареи и «пищалка». Его преемник CC3D Revolution — это уже совсем иной продукт с богатыми возможностями, но и ценой свыше 40€. Современные полётные контроллеры уже перешли с процессоров F1 на F3, что сделало Naze32 ПК прошлого поколения и ощутимо снизило его цену. Сейчас это поистине народный контроллер, который имеет почти всё, что душа желает при цене от 12€. Из ПК нового поколения наиболее популярен Seriously Pro Racing F3, причём в первую очередь, из-за наличия недорогих клонов. Сам контроллер ничем не уступает Naze32, вдобавок имеет быстрый процессор F3, большое количество памяти, три UART-порта, встроенный инвертор для S.Bus. Именно SPRacingF3 Acro я и выбрал. Остальные современные ПК не рассматривались из-за цены, либо каких-то специфических особенностей (закрытая прошивка, компоновка и т.д.) Отдельно отмечу модную ныне тенденцию объединять несколько плат в одну. Чаще всего ПК и OSD или ПК и PDB Я не поддерживаю данную идею за парой исключений. Мне не хочется менять весь полётный контроллер из-за сгоревшей OSD. К тому же, как показывает практика, иногда такое объединение приносит проблемы.
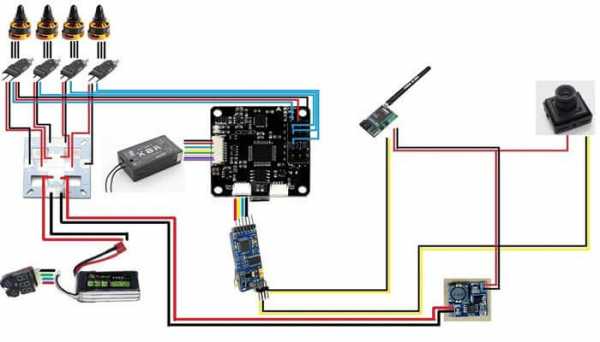
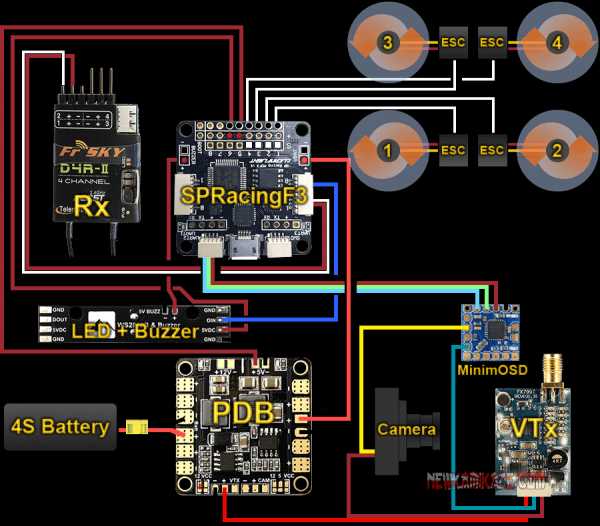
Схема проводки
Понятное дело, что все компоненты, которым нужно питание 5В или 12В, будут получать его от BEC`ов платы распределения питания. Камеру теоретически можно было запитать напрямую от 4S-батареи, благо входное напряжение это позволяет, но ни в коем случае делать этого не стоит. Во-первых, все камеры очень восприимчивы к шумам в цепи от регуляторов, что выразится в помехах на картинке. Во-вторых, регуляторы с активным торможением (такие, как мои LittleBee), при активизации этого торможения, дают в бортовую сеть очень серьёзный импульс, что может сжечь камеру. Причём, наличие импульса напрямую зависит от износа батареи. У новых его нет, а у старых — есть. Вот познавательное видео на тему помех от регуляторов и чем их фильтровать. Так что камеру лучше питать либо от BEC`а, либо от видеопередатчика. Также, ради улучшения качества картинки, рекомендуется пустить с камеры на OSD не только сигнальный провод, но и «землю». Если скрутить эти провода в «косичку», то «земля» действует, как экран для сигнального провода. Правда в данном случае я этого не делал. Коли уж зашла речь о «земле», то часто спорят о том, надо ли подключать «землю» от регуляторов к ПК или достаточно одного сигнального провода. На обычном гоночном квадрокоптере однозначно надо подключать. Её отсутствие может привести к срывам синхронизации (подтверждение). Конечная схема проводки получилась простой и лаконичной, но с парой нюансов:
- питание полётного контроллера (5В) от PDB через выходы для регуляторов
- питание радиоприёмника (5В) от ПК через разъём OI_1
- питание видеопередатчика (12В) от PDB
- питание камеры (5В) от видеопередатчика
- OSD подключил к UART2. Многие используют для этого UART1, но как и на Naze32, здесь этот разъём запараллелен с USB.
- Vbat подключен к ПК, а не к OSD. В теории показания вольтажа батареи (vbat) можно считывать как на OSD, так и на ПК, подключив батарею либо к одному, либо к другому. В чём разница? В первом случае показания будут присутствовать только на экране монитора или очков и ПК ничего не будет о них знать. Во втором случае ПК может отслеживать напряжение батареи, информировать о нём пилота (например, «пищалкой»), а также передавать эти данные на OSD, в «чёрный ящик» и по телеметрии на пульт. Настраивать точность показаний тоже проще через ПК. То есть, подключение vbat к полётному контроллеру намного предпочтительнее.
Сборка
Для начала несколько общих советов по сборке:
- Карбон проводит ток. Так что всё надо хорошо изолировать, чтобы нигде ничего не замыкало на раму.
- Всё, что выступает за пределы рамы, при аварии вероятнее всего, будет сломано или оторвано. В данном случае речь идёт, в первую очередь, о разъёмах. Провода тоже могут быть перерублены винтом, так что и их надо прятать.
- Крайне желательно после пайки покрыть все платы изолирующим лаком PLASTIK 71, причём в несколько слоёв. По собственному опыту скажу, что наносить жидкий лак кисточной намного удобнее, чем покрывать спреем.
- Не лишним будет капнуть немного термоклея на места пайки проводов к платам. Это защитит пайку от вибраций.
- Для всех резьбовых соединений желательно использовать «Локтайт» средней фиксации (синий).
Сборку я предпочитаю начинать с моторов и регуляторов. Здесь хорошее видео по сборке маленького квадрокоптера, с которого я перенял идею расположения проводов моторов.
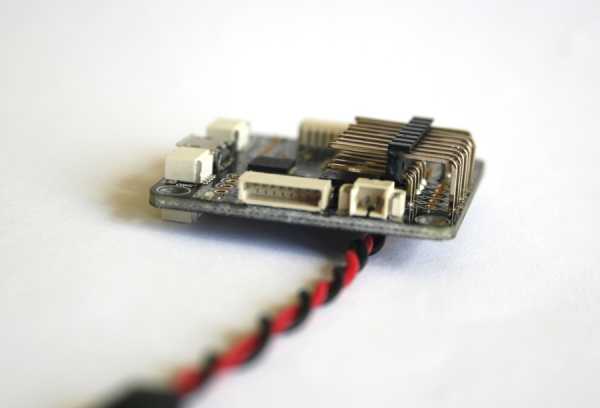
Отдельно хочется сказать про крепление регуляторов: где и чем? Их можно закрепить на луче и под ним. Я выбрал первый вариант, так как мне кажется, что в этом положении регулятор более защищён (это мои домыслы, не подтверждённые практикой). Вдобавок, при креплении на луче, регулятор отлично охлаждается воздухом от пропеллера. Теперь о том, как закрепить регулятор. Способов много, наиболее популярный — двухсторонний скотч + одна-две стяжки. «Дёшево и сердито», к тому же демонтаж трудностей не доставит. Хуже то, что при таком креплении можно повредить плату регулятора (если ставить стяжку на неё) или провода (если крепить на них). Так что я решил крепить регуляторы термоусадочной трубкой (25мм) и запаял их вместе с лучами. Есть один нюанс: сам регулятор тоже должен быть в термоусадке (мои в ней и продавались), чтобы не соприкасаться контактами с карбоном луча, иначе — КЗ.

Также имеет смысл приклеить по кусочку двухстороннего скотча снизу на каждый луч в месте крепления мотора. Во-первых, он защитит подшипник мотора от пыли. Во-вторых, если по какой-то причине один из болтиков открутиться, он не выпадет при полёте и не потеряется. При сборке рамы не использовал ни одного болтика из комплекта, так как все они неприлично короткие. Вместо этого приобрёл чуть длиннее и с головкой под крестовую отвёртку (есть такое личное предпочтение).
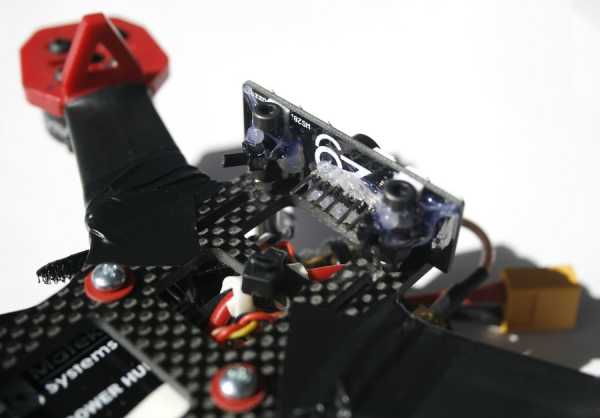
Камера не помещалась по ширине между боковых пластин рамы. Немного обработал края её платы надфилем (скорее сточил шероховатости) и она встала без проблем. Но сложности на этом не кончились. Мне очень понравилось качество держателя для камеры от Diatone, но камера с ним не помещалась в раму по высоте (примерно на 8-10мм). Сначала я приколхозил держатель на наружной (верхней) стороне пластины через неопреновый демпфер, но конструкция получилась ненадёжной. Позже пришла идея максимально простого и надёжного крепления. Я взял только хомут от Diatone`овского крепления и одел его на отрезок прута с резьбой М3. Чтобы камера не сместилась вбок, я зафиксировал хомут нейлоновыми муфтами.

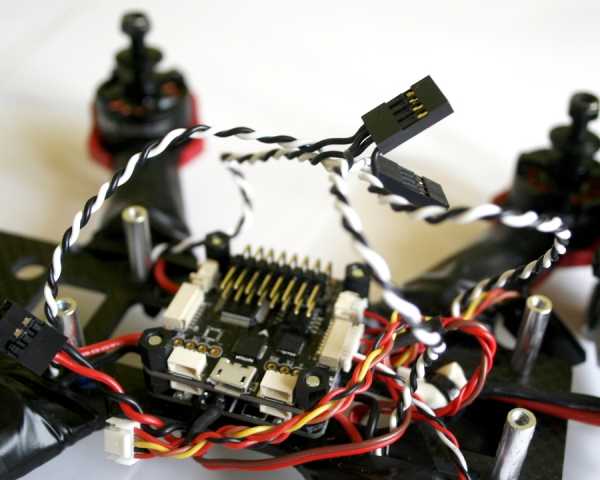
Очень понравилось, что из разъёмов на ПК пришлось паять только коннекторы для регуляторов. Полноценные трёхконтактные разъёмы у меня не вписывались по высоте, пришлось пойти на хитрость и использовать двухпиновые. Для первых пяти каналов (4 для регуляторов + 1 «на всякий пожарный») я припаял коннекторы к сигнальной площадке и «земле», для остальных трёх — к «плюсу» и «земле», чтобы можно было запитать сам ПК и уже от него — подсветку. Учитывая, что китайские клоны полётных контроллеров грешат ненадёжной фиксацией разъёма USB, его я пропаял тоже. Ещё одним моментом, характерным для клона SPRacingF3, является разъём «пищалки». Как и в случае с vbat, на верхней стороне платы находится двухконтактный разъём JST-XH, а на нижней — он продублирован контактными площадками. Закавыка в том, что у клона «земля» на разъёмe постоянная и при его использовании «пищалка» всегда будет активирована. Нормальная рабочая для «пищалки» «земля» выведена только на контактную площадку. Это легко проверяется тестером: «плюс» разъёма прозванивается с «плюсом» на контактной площадке, а «минус» — не прозванивается. Следовательно, надо припаять провода для «пищалки» к нижней стороне ПК.
Трёхконтактные разъёмы регуляторов тоже пришлось заменить. Можно было использовать четыре двухконтактных штекера, но вместо этого, я взял два четырёхконтактных штекера и вставил в один «землю» всех регуляторов, во второй (соблюдая порядок подключения моторов) — сигнальный провод.
Пластина с подсветкой по ширине больше, чем рама и выступает по бокам. Единственное место, где её не собьют пропеллеры — под рамой. Пришлось колхозить: взял длинные болты, надел на них нейлоновые муфты с предварительно проделанными прорезями (чтоб стяжки, крепящие подсветку, могли зафиксироваться) и вкрутил через нижнюю пластину в стойки рамы. К получившимся ножкам стяжками притянул пластину со светодиодами (отверстия в пластине подходили идеально) и залил стяжки термоклеем. С задней стороны пластины припаял коннекторы. Уже после сборки, на этапе настройки выяснилось, что с пищалкой что-то не то. Сразу после подключения батареи она начинала монотонно пищать, а если активизировать её с пульта, то на этот монотонный писк накладывался ещё и ритмичный. Я сначала грешил на ПК, но после замера напряжение мультиметром, стало ясно где именно проблема. На самом деле можно было с самого начала подключить к проводам пищалки обычный светодиод. В итоге я заказал сразу несколько пищалок, послушал их и установил самую громкую.

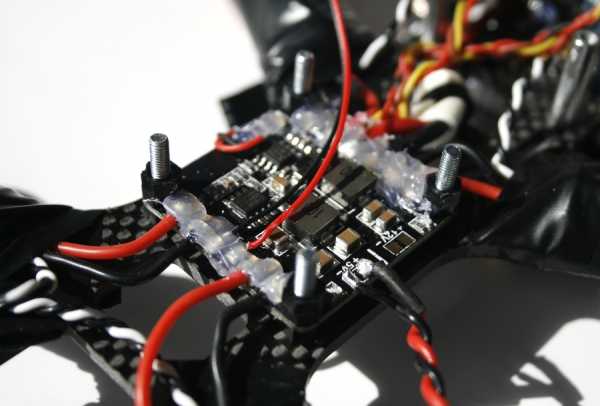
Часто PDB и контроллер крепят к раме нейлоновыми болтами, но я не доверяю их прочности. Поэтому я использовал 20мм металлические болты и нейлоновые муфты. После установки PDB я припаял питание регуляторов (остальные провода были припаяны заранее) и залил места пайки термоклеем. Главный силовой провод, идущий к батарее, я стяжкой закрепил к раме, чтобы его не вырвало в случае аварии.
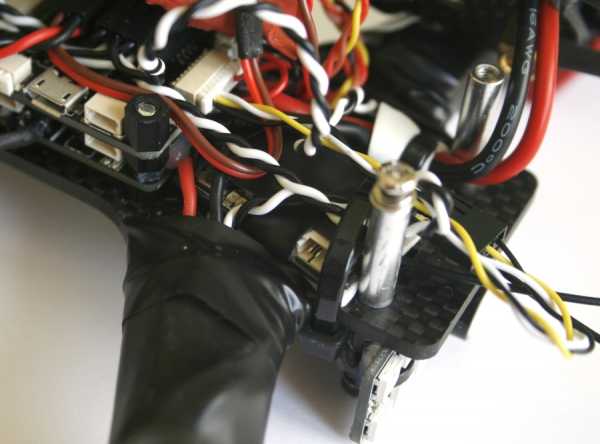
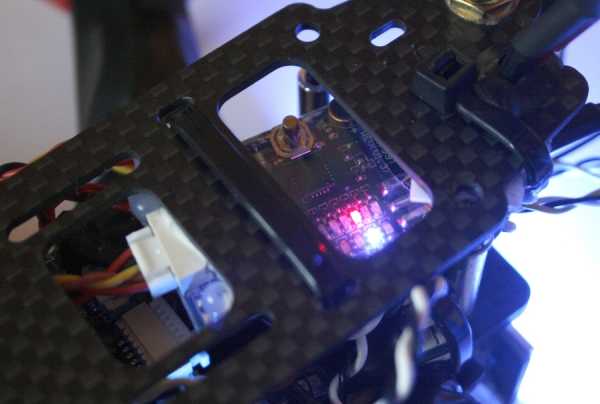
С приёмника я кусачками удалил все коннекторы, кроме необходимых трёх, а перемычку между третьим и четвёртым каналами пропаял прямо на плате. Как я уже писал выше, разумнее было бы брать приёмник без коннекторов. Также я развернул у него антенны и заплавил в термоусадку. На раме приёмник хорошо поместился между PBD и задней стойкой. При таком расположении хорошо видно его индикаторы и есть доступ к кнопке бинда.
Видеопередатчик стяжками и термоклеем я закрепил к верхней пластине рамы так, чтобы через прорезь был доступ к кнопке переключения каналов и светодиодным индикаторам.
Для крепления антенны видеопередатчика в раме есть специальное отверстие. Но не стоит соединять её с передатчиком напрямую. Получается своего рода рычаг, где одним плечом служит антенна, другим — сам передатчик со всеми проводами, а место крепления разъёма будет точкой опоры, на которую придётся максимум нагрузки. Таким образом, в случае аварии почти со 100% вероятностью разъём на плате передатчика отломается. Поэтому крепить антенну надо через какой-то переходник или удлинитель.
К MinimOSD я решил припаять разъёмы, а не провода напрямую. На форумах пишут, что эта плата нередко сгорает, следовательно разумно сразу подготовиться к возможной замене. Я взял планку с коннекторами в два ряда, нижние припаял к контактным площадкам с отверстиями, а на верхние вывел vIn и vOut. После этого залил места пайки термоклеем и упаковал всю плату в термоусадку.
Последним штрихом является наклейка с номером телефона. Она даст хоть небольшую надежду в случае потери квадрокоптера.

Сборка на этом подошла к концу. Получилось компактно и при этом сохранён доступ ко всем необходимым органам управления. Больше фотографий можно посмотреть здесь. Масса квадрокопрера без батареи составляет 330г, с батареей — 470г. И это ещё без экшн-камеры и крепления для неё. В следующей статье я расскажу о прошивке и настройке получившегося квадрокоптера.
habr.com
Основная терминология из мира дронов
Вступительное слово
Сегодня мы начинаем публиковать на нашем сайте совершенно новый и достаточно большой материал, на подготовку которого у нас ушла масса времени и сил. Это серия статей и заметок, объединенных общей тематикой — Как собрать и построить собственный дрон своими руками? Мы постараемся описать весь этот процесс максимально подробно и снабдить его всеми необходимыми дополнениями.
Материал действительно объемный и вы увидите это после того, как мы завершим публикацию. Чтобы вам было проще воспринимать его и легче ориентироваться, мы решили разбить его на несколько отдельных тематических публикаций. Все они будут иметь перекрестные ссылки и будут находиться в одном разделе на сайте, чтобы облегчить процесс навигации.
Почему наш материал на тему сборки собственного дрона получился настолько объемным? Всё дело в том, что мы не хотели упустить ничего важного и поэтому описали все возможные аспекты процесса сборки и начали с самых азов — понимание основ сборки дронов, основные отличия комплектующих, задачи готовых дронов и так далее. В нашей серии материалов вы найдете всё от А до Я о том, как собрать собственный дрон.
Итак, садитесь поудобнее, приготовьте блокнот для заметок, а мы начинаем.
Важное уточнение
Помните, что собрать дрон своими руками можно только путем значительных временных затрат, особенно если вы новичок. Если ваша задача только в том, чтобы «взлететь» как можно скорее, то, вероятно, есть смысл рассмотреть уже готовые модели от DJI, GoPro и других производителей, которых сегодня в продаже огромное разнообразие.

Как собрать дрон своими руками
Часть 1:Основная терминология из мира дронов
Еще до того как вы начнете сборку собственного дрона, вам необходимо разобраться с массой терминологии. По началу она может показаться запутанной или пугающей, но я вас уверяю, что стоит разобраться один раз и в будущем это серьезно облегчит ваши задачи и даже само понимаение публикуемых нами материалов. Для удобства мы разбили все термины на несколько основных категорий.
Основные
Дрон: Синоним для терминов «квадрокоптер», «коптер» или английского «UAV». Дроном можно назвать любой летательный аппарат, управляемый пилотом удаленно.
DIY: Сокращение для англоязычного «Do-It-Yourself» (Сделай сам). Используется для обозначения процесса самостоятельной сборки дрона из разрозненных частей, изначально не созданных для работы друг с другом.
UAV: Сокращение для английского «unmanned aerial vehicle» (беспилотный летательный аппарат).
Механическая часть
Размер: Для того, чтобы обозначит размер готового дрона, используются, как правило, миллиметры. Размером называют расстояние от центральной оси одного мотора до центральной оси другого мотора. Размер также позволяет разделить дроны на классы (мини, микро и так далее).
CG: Сокращение для Center of Gravity (центр тяжести). Центральная точка всей конструкции, вокруг которой равномерно распределены грузы и нагрузки.
Уплотнители: Небольшие резиновые или прорезиненные элементы, которые используются в различных узлах конструкции для уменьшения вибрации и шума при полете.
Рама: У дрона эта запчасть является полным аналогом человеческого скелета — именно на ней держатся основные элементы конструкции, именно она скрепляет их все и позволяет дрону полноценно работать.
Шасси: Элемент, позволяющий дрону успешно и без повреждений совершать посадку. В самолетах используются колеса в качестве шасси, а для дронов это чаще всего пластиковые, металлические, прорезиненные или перфорированные ножки, стойки и пр.
LED: Светодиодная подсветка или светодиодные фонари, которые позволяют ориентироваться в темноте.
Опоры: Ободы, часто расположенные вокруг вращающихся лопастей и предназначенные для их защиты и предотвращения контакта с внешними элементами и предметами. Также они защищают пилота при взаимодействии с уже работающим дроном.
Оболочка: Это, собственно, сам корпус летательного аппарата. Производится он из различных материалов и имеет самую различную форму в зависимости от функциональности и задач дрона. Также именно оболочка корпуса дрона может влиять на его аэродинамические характеристики.
Сенсоры
Акселерометр: Предназначен для измерения ускорения дрона в открытом пространстве.
Барометр: Измеряет высоту полета дрона в реальном времени. Показатели этого сенсора основываются на давлении воздуха.
Гироскоп: Позволяет определять наклоны дрона в пространстве по осям x, y и z. Отвечает за стабилизацию и маневренность дрона в полете.
GPS: Сокращение от «Global Positioning System» (Глобальная Система Позиционирования). Позволяет спутникам на основе получаемых от дрона данных определять его местоположение в пространстве. Служит для автоматического пилотирования по заданному маршруту или для перелета в конкретную заданную точку.
Типы дронов
RTF: Или «Ready-to-Fly». Модели, полностью готовые к полетам и оснащённые прямо «из коробки» всеми необходимыми комплектующими и аксессуарами.
BNF: «Bind-and-Fly». Также полностью собранный и настроенный аппарат, не оснащенный при этом манипулятором или любым другим контроллером. Каждый пользователь самостоятельно выбирает себе подходящую по функциональности модель.
ATF: «Almost-Ready-to-Fly». Комплект для сборки дрона, который подразумевает выбор кастомных комплектующих. Каждый пользователь комплектует свое устройство запчастями из предложенных готовых и полностью совместимых вариантов.
Гексакоптер: Дрон, оснащенный шестью моторами/роторами. Количество пропеллеров, как правило, соответствует количеству моторов.
Мультиротор: Любой летательный аппарат, использующий несколько роторных моторов.
Октокоптер: Восьмимоторный дрон.
Квадрокоптер: Четырехмоторный/четырехпропеллерный дрон.
Трикоптер: Летательный аппарат на трех моторах/роторах.
Движущая установка
ESC: «Electronic Speed Controller». Отдельный элемент электроники, подключаемый к мотору, контроллеру и аккумулятору и способный регулировать скорость работы роторов, а соответственно регулировать и скорость полета аппарата. Более подробно о таких контроллерах мы расскажем в следующих материалах.
Li-Po: «Lithium Polymer». Литий-полимерные элементы питания, которые чаще всего используются в дронах различных типов. Главные преимущества этого типа аккумуляторов — малый вес при достаточно большой емкости, а также способность выдавать большие показатели тока.
Мотор: Двигатель, который приводит в движение лопасти и пропеллеры дрона. В крупных моделях используются бесщеточные моторы, а в моделях поменьше — щеточные. О разнице и преимуществах этих типов моторов также поговорим в одном из следующих материалов о том, как собрать дрон своими руками.
PCB: Печатная плата, на которой располагается большое количество контроллеров и электронных элементов, обеспечивающих работу аппарата.
Контроллер питания: Отвечает за качественное и сбалансированное питание всех отдельных элементов, подключенных к дрону. Так как от одного аккумулятора приходится запитывать сразу несколько устройств (сам дрон, камера, сенсоры и так далее), то практически всегда есть необходимость в контроллере питания.
Видео
FPV: «First Person View». Модели, поддерживающие видео с видом от первого лица. Как правило, такие дроны используются для стрима видео в реальном времени, а не для записи картинки.
LCD: Дисплей, на котором отображается картинка из объектива или другая информация.
Подвес: Крепление для камеры, главной задачей которого является стабилизация изображения во время полета.
GoPro: Популярный бренд экшн-камер, адаптированных для использования в связке с дронами и совместимых с большинством креплений.
С терминологией более-менее разобрались. Здесь представлена наиболее часто используемая ее часть. В следующих материалах, используя эти термины и понятия, мы расскажем о самом процессе подбора комплектующих, о том, как собрать дрон своими руками и как правильно его настроить.
Продолжение следует.
Коментарии
коментарии
dronesmag.com.ua
Самодельный дрон из того что есть
Как сделать дрон из велосипедного обода за 5 минут
Как видите любой предмет может за считанные минуты превратится во вполне презентабельный и качественный авиа дрон. Все зависит лишь от вашей фантазии. Достаточно лишь подготовить заранее весь мобильный комплект, собрать который тоже не особо сложно.
 Все пластиковые детали, предназначенные для крепления моторов, были напечатаны на 3D-принтере из ABS-пластика. Но с таким же успехом могут быть заменены простыми пластиковыми струбцинами коих в огромном количестве полно в магазинах и настоящему умельцу ничто не помешает изготовить крепеж собственной конструкции.Кроме пластиковых деталей, винтов, гаек и шайб, в комплект дрона входят четыре мотора с пропеллерами (два с правым и два с левым вращением), батареи и электронные модули.
Все пластиковые детали, предназначенные для крепления моторов, были напечатаны на 3D-принтере из ABS-пластика. Но с таким же успехом могут быть заменены простыми пластиковыми струбцинами коих в огромном количестве полно в магазинах и настоящему умельцу ничто не помешает изготовить крепеж собственной конструкции.Кроме пластиковых деталей, винтов, гаек и шайб, в комплект дрона входят четыре мотора с пропеллерами (два с правым и два с левым вращением), батареи и электронные модули.  Подробная спецификация комплектующих с перечнем конкретных изделий, которые этот автор использовал лично, будет позже опубликована на нашем сайте. Отдельные позиции из этого перечня можно заменить на какие-то другие, не забывая о том, что замены могут повлиять на эксплуатационные характеристики комплекта, включая основную грузоподъемность. Комплект, собранный самим автором, вполне свободно поднимает в воздух обычное велосипедное колесо.
Подробная спецификация комплектующих с перечнем конкретных изделий, которые этот автор использовал лично, будет позже опубликована на нашем сайте. Отдельные позиции из этого перечня можно заменить на какие-то другие, не забывая о том, что замены могут повлиять на эксплуатационные характеристики комплекта, включая основную грузоподъемность. Комплект, собранный самим автором, вполне свободно поднимает в воздух обычное велосипедное колесо.
дронКонструкцииСтроить
Похожие сообщения
aviadron.ru