«Яндекс» испытал беспилотный автомобиль на улицах Москвы. Яндекс беспилотные автомобили
Технологии беспилотных автомобилей. Лекция Яндекса / Блог компании Яндекс / Хабр
Сегодня мы сосредоточимся на компоненте perception, поскольку она больше про анализ данных, и на мой взгляд, в ближайшем будущем это самая челленджевая часть на всем фронте работ по беспилотникам. Остальные компоненты тоже безумно важны, но чем лучше мы мир вокруг распознаем, тем проще будет делать все остальное.
Прежде покажу другой подход. Многие слышали, что есть end-to-end-архитектуры и, более специфично, есть так называемый behavior cloning, когда мы пытаемся собрать датасеты того, как водитель ездит, и склонировать его поведение. Есть несколько работ, где описано, как это проще всего делать. Например, используется вариант, когда у нас есть только три камеры, чтобы «агментировать» данные, чтобы мы ехали не по одной и той же траектории. Это все засовывается в единую нейросеть, которая говорит, куда крутить рулем. И это как-то работает, но как показывает текущее состояние дел, сейчас end-to-end еще находится в состоянии исследования.
Мы его тоже пробовали. У нас один человек end-to-end быстро обучил. Мы даже немного испугались, что сейчас уволим всю остальную команду, потому что он за месяц достиг результатов, которые мы три месяца делали большим количеством людей. Но проблема в том, что дальше сдвинуться уже тяжело. Мы научились ездить вокруг одного здания, а ездить вокруг того же здания в противоположную сторону уже гораздо сложнее. До сих пор не существует способа представить все в виде единой нейросети, чтобы это более-менее робастно работало. Поэтому все, что ездит в реальных условиях, обычно работает на классическом подходе, где perception в явном виде строит мир вокруг.
Как perception работает? Для начала надо понять, какие данные и какая информация стекается на вход автомобиля. В автомобиле множество сенсоров. Самые широко используемые — камеры, радары и лидары.
Радар — это уже продакшен-сенсор, который активно используется в адаптивных круиз-контролях. Это сенсор, который говорит, где находится автомобиль по углу. Он очень хорошо работает на металлических вещах, таких как автомобили. На пешеходах работает хуже. Отличительной особенностью радара является то, что он не только позицию, но еще и скорость выдает. Зная Доплеровский эффект, мы можем узнать радиальную скорость.
Камеры — понятно, обычная видео-картинка.
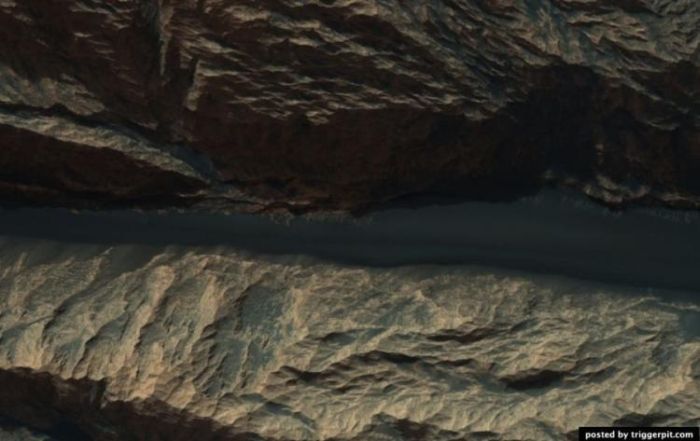
Более интересен лидар. Те, кто делал ремонт дома, знакомы с лазерным дальномером, который вешается на стенку. Внутри секундомер, который считает, за сколько свет туда-обратно слетал, и мы меряем расстояние.
На самом деле там более сложные физические принципы, но суть в том, что тут множество лазерных дальномеров, которые вертикально расположены. Они сканируют пространство, он так крутится. Вот картинка, которая получается 32-лучевым лидаром. Очень классный сенсор, на расстоянии нескольких метров человека можно узнать. Работают даже наивные подходы, уровня нашли плоскость — все, что выше это препятствие. Поэтому лидар все очень любят, это ключевая компонента беспилотных автомобилей.
С лидаром несколько проблем. Первая — он достаточно дорого стоит. Вторая — он все время крутится, и рано или поздно открутится. Надежность их оставляет желать лучшего. Обещают лидары без движущихся частей и дешевле, а другие обещают, что сделают все на компьютерном зрении только на камерах. Кто победит — самый интересный вопрос. Есть несколько сенсоров, каждый из них генерит какие-то данные. Есть классический пайплайн того, как мы обучаем какие-то алгоритмы машинного обучения. Данные надо собрать, залить в какое-то облако, на примере машины, мы собираем с автомобилей данные, заливаем в облака, каким-то образом размечаем, выбираем лучшую модель, придумываем модельку, тюним параметры, переобучаем. Важный нюанс, что это надо обратно на машину засунуть, чтобы это очень быстро работало. Данные собрали в облако, хотим их разметить. Уже сегодня упомянутая Толока — мой любимый сервис Яндекса, который позволяет кучу данных размечать очень дешево. Можно создать GUI в качестве веб-страницы и раздать на разметку. В случае детектора машинок нам их достаточно выделять прямоугольниками, это делается просто и дешево. Потом выбираем какой-нибудь метод машинного обучения. Для ML существует много быстрых методов: SSD, Yolo, их модификации. Потом это нужно вставить в автомобиль. Камер много, 360 градусов надо покрывать, должно работать очень быстро, чтобы реагировать. Используются разнообразные техники, Inference движки типа Tensor RT, специализированное железо, Drive PX, FuseNet, несколько алгоритмов используем, единый бэкенд, сверточки прогоняются один раз. Это достаточно распространенная технология.
Object detection работает как-то так:
Тут помимо машин мы детектим еще пешеходов, еще детектим направление. Стрелочка показывает оценку направления только по камере. Сейчас она лажает. Это алгоритм, который работает на большом числе камер в реальном времени на машине. Про object detection это решенная задача, многие ее умеют делать, куча алгоритмов, куча соревнований, куча датасетов. Ну, не очень много, но есть. С лидарами гораздо сложнее, есть один более-менее релевантный датасет, это KITTI dataset. Приходится размечать с нуля.Как с этим работать? Облака точек, нейросети лучше всех в детекции, поэтому нужно понять, как облако точек с 3D-координатами вокруг автомобиля подать на вход сети.
Вcе выглядит так, что нужно каким-то образом это представить. Мы экспериментировали с подходом, когда нужно сделать проекцию, вид сверху точек, и разрезать на клеточки. Если в клеточке есть хоть одна точка, то она занята. Можно пойти дальше — сделать слайсы по вертикали и, если в кубике по вертикали есть хоть одна точка, записать ее в какую-то характеристику. Например, хорошо работает запись самой верхней точки в кубике. Слайсы подаются на вход нейросетки, это просто аналог картинок, у нас 14 каналов на вход, работаем примерно так же, как с SSD. Еще сюда приходит сигнал с сети, натренированной на детекцию. На входе сети — картинка, это все тренируется end-to-end. На выходе предсказываем 3D-боксы, их классы и позицию. Вот результаты месячной давности на KITTI dataset. Тогда multiple view 3D был state of the art. Наш алгоритм был схож по качеству с точки зрения precision, но работал в несколько раз быстрее, и мы могли его задеплоить на реальную машину. Ускорение было достигнуто за счет упрощения представления в основном. Нужно снова задеплоить на машинку. Вот пример работы.
Тут надо осторожно, это train, но на тесте тоже работает, зелеными параллелепипедами отмечены машинки.
Сегментация — еще один алгоритм, который можно использовать для понимания того, что на картинке расположено. Сегментация говорит, к какому классу принадлежит каждый пиксель. Конкретно на этой картинке есть дорога, разметка. Края дороги выделены зеленым цветом, а автомобили немножко другим, фиолетовым.
Кто понимает недостатки сегментации с точки зрения того, как это в motion planning скормить? Все сливается. Если рядом припаркованные машины, то у нас одно большое фиолетовое пятно машин, мы не знаем, сколько их там. Поэтому есть другая замечательная постановка задачи — instance segmentation, когда нужно еще разрезать разные сущности на кусочки. И этим мы тоже занимаемся, товарищ на прошлой неделе в топ-5 city scapes по instance segmentation зашел. Хотел на первое место, пока не получается, но такая задача тоже есть. Мы стараемся пробовать как можно больше разнообразных подходов, гипотез. Наша задача не в том, чтобы написать лучший в мире object detection. Это нужно, но, в первую очередь, появляются новые сенсоры, новые подходы. Задача — как можно быстрее их пробовать и внедрять в реальных жизненных обстоятельствах. Мы работаем над всем тем, что нам мешается. Медленно размечаем данные — делаем систему, которая размечает их с активным использованием сервиса Толока. Проблема с деплоем на машину — придумываем, как это ускорять единым образом.
Кажется, победит не тот, кто сейчас обладает большим опытом, а тот, кто быстрее бежит вперед. И мы сосредоточены на этом, хотим как можно быстрее все пробовать.
Вот видео, которое мы недавно показывали, проезд в зимних условиях. Это рекламное видео, но тут хорошо видно, примерно как ездят беспилотные автомобили в текущих реалиях (с тех пор появилось ещё одно видео — прим. ред.). Спасибо.
habr.com
Такси-беспилотники "Яндекса" вышли на дороги Москвы
Оборудованное системой для автономной езды такси "Яндекса" впервые заметили на дорогах общего пользования в Москве. В компании подтвердили, что выводят беспилотники на улицы, однако отметили, что пока что ими управляют люди.
Фото Toyota Prius с символикой "Яндекс.Такси" и оборудованием для автономного перемещения на крыше, сделанное ведущим программы Вести.net Филиппом Трофимовым, опубликовал в Facebook его коллега Павел Кушелев. Как написал журналист, снимок сделан в районе Хамовники, то есть недалеко от московской штаб-квартиры "Яндекса".
В пресс-службе "Яндекса" подтвердили изданию TJournal, что автономные авто компании уже какое-то время ездят по городским улицам, однако ими управляют люди. Поездки, сказали в компании, совершаются для сбора данных "о реальной дорожной ситуации".
Впервые существование проекте по разработке алгоритмов для самоуправляемых автомобилей "Яндекс" подтвердил во время своей ежегодной конференции YaC в конце мая этого года. Работа над проектом началась еще годом ранее. Все алгоритмы и технологии разработаны в "Яндексе", причем многие из них – например, карты, пробки, навигация в режиме реального времени, компьютерное зрение и распознавание объектов – давно работают в других проектах компании. На тот момент автопарк беспилотных машин "Яндекса" состоял из двух прототипов. Машины оснащены всеми необходимыми датчиками, с помощью которых алгоритм изучает разные дорожные условия.
А в конце осени "Яндекс" выложил в сеть видео, на котором его беспилотники перемещаются самостоятельно в сложных погодных условиях — по снегу:
Waymo, вместе с Google входящая в холдинг Alphabet, также в этом году решила переместить тестирование своих беспилотных авто из сухих и солнечных Калифорнии и Аризоны в заснеженный Детройт на севере США.
Поделитесь новостью:
hitech.vesti.ru
Беспилотник до работы и обратно — Яндекс.Такси
Два месяца назад наш беспилотный автомобиль приехал в Татарстан. Он не стал возвращаться в Москву — и теперь мы можем рассказать, почему. Сегодня Яндекс и правительство Татарстана подписали соглашение о развитии в республике беспилотного транспорта. Оно предусматривает создание в Иннополисе тестовой зоны для передвижения автомобиля. А главное — Иннополис стал первым в Европе городом, где можно воспользоваться беспилотником для повседневных поездок.
В тестовой зоне в Иннополисе есть пять точек посадки и высадки пассажиров. Они расположены рядом с ключевыми городскими объектами: университетом, стадионом, медицинским центром, жилым кварталом «Зион» и административно-деловым центром имени Попова — в нём находятся офисы многих компаний, включая Яндекс. Утром житель города может вызвать беспилотник к дому в «Зионе» и доехать на работу в АДЦ, оттуда отправиться в университет читать лекцию студентам, а вечером съездить на стадион посмотреть спортивный праздник.
Беспилотный автомобиль Яндекса будет работать в Иннополисе ежедневно. Воспользоваться им могут все взрослые жители города, которые дали согласие на участие в тестировании. Время ожидания автомобиля зависит от спроса. Чтобы быстрее добраться до места назначения, можно устроить совместную поездку: скажем, объединиться с соседями по дому и вместе отправиться на работу в Технопарк. В салоне могут разместиться до трёх пассажиров.
Беспилотный автомобиль строго соблюдает все правила дорожного движения. Он пропускает пешеходов, распознаёт и объезжает препятствия и умеет применять экстренное торможение, если вдруг это потребуется. Мы понимаем, что автомобиль без водителя — новое для наших дорог явление. Поэтому в салоне постоянно находится наш инженер-испытатель. Он контролирует работу систем автомобиля и следит за тем, чтобы поездка проходила в штатном режиме.
Иннополис находится в 35 километрах от Казани. Это совсем молодой город — статус городского поселения он получил всего три года назад. Мы решили создать тестовую зону именно в Иннополисе по нескольким причинам. Во-первых, это один из центров российской IT-индустрии — своего рода «город будущего», где создаются и тестируются информационные технологии. Во-вторых, в Иннополисе сложилась полноценная городская среда. Здесь есть жилые кварталы, деловой центр, университет, больница, магазины, бары, кофейни. Наконец, в Иннополисе живут и работают молодые учёные. Они с энтузиазмом воспринимают всё новое и стремятся сделать жизнь удобнее с помощью технологий — так же, как и мы.
Открытие тестовой зоны в Иннополисе — новый этап в истории беспилотного автомобиля Яндекса. Мы тестируем технологию на улицах города уже давно, но теперь для участия в испытаниях необязательно устраиваться на работу в Яндекс. Наш автомобиль становится частью городской жизни.
taxi.yandex.ru
«Яндекс» испытал беспилотный автомобиль на улицах Москвы
Команда Яндекс.Такси провела испытания автоматизированной системы управления автомобилем в зимних условиях. Как сообщается в блоге компании, робомобиль протестировали в Хамовниках — именно там находится главный офис «Яндекса». Испытания проходили в феврале после снегопада, однако дороги к моменту испытаний уже успели почистить.
На видеоролике показано, как автомобиль самостоятельно движется по дорогам, останавливается на перекрестках, пропускает пешеходов и другие машины, а также делает повороты. За рулем робомобиля находился пилот-испытатель, который, однако, не принимал участия в управлении транспортным средством.
В тестировании был использован автомобиль Toyota, оснащенный системой автопилотирования. В салоне также установили дисплей, содержание которого на видео скрыли. Как поясняет «Медуза» со ссылкой на пресс-службу «Яндекса», на экран выведена техническая информация, которая нужна инженерам и пилоту-испытателю. В процессе движения дисплей отражает то, как робомобиль «видит окружающий мир».
Специалисты «Яндекса» пояснили, что испытания робомобилей зимой отличаются от испытаний в другие времена года. Главную проблему для беспилотного автомобиля представляют снег и лед на дороге. Также из-за обилия белого автомобилю сложнее выявить очертания дороги и распознать дорожные знаки и разметку, поэтому видеопоток с камер обрабатывается не так, как в другие сезоны. Для этого компания собирает данные с заснеженных дорог — сбор ведется с декабря прошлого года.
Впервые компания показала работу своего робомобиля на заснеженной трассе в Подмосковье в ноябре 2017 года. В испытаниях были использованы прототипы на базе Toyota Prius. Однако первая демонстрация беспилотных технологий «Яндекса» состоялась в мае прошлого года. Тогда компания показал, как прототип роботизированного такси движется по закрытой территории без разметки полос, аккуратно объезжает препятствия и неожиданные помехи.
hightech.fm
Тест-драйв беспилотника от «Яндекса» | Журнал Популярная Механика
Сразу за поворотом направо, на двухполосную дорогу, путь перегородил широкий черный внедорожник: какой-то недисциплинированный водитель припарковался прямо под запрещающим знаком, включив аварийные сигналы. Обойти его было возможно, лишь заехав колесом на сплошную полосу, — и мы встали, дожидаясь, пока проезд освободится.

Роман Фишман
23 июля 2018 14:00
Сзади мигом выросла гудящая пробка, и тогда наш водитель впервые взялся за руль: пока что роботу запрещено совершать потенциально опасные маневры, и в этом ему должен помочь человек. Но как только объезд был закончен, он опять опустил руки, а умная машина перехватила управление. Можно было посмотреть по сторонам — за окном проплывал город, рулевое колесо крутилось само по себе, на экране облака точек складывались в движущиеся силуэты, среди которых автоматически выделялись светофоры и автомобили, велосипедисты и прохожие.
 Дмитрий Полищук — глава группы разработчиков беспилотного автомобиля «Яндекса"На Дмитрии: ветровка Armani Exchange, свитшот Strellson, рубашка Calvin Klein Jeans, брюки Frame, ботинки Ecco, часы Montblanc
Дмитрий Полищук — глава группы разработчиков беспилотного автомобиля «Яндекса"На Дмитрии: ветровка Armani Exchange, свитшот Strellson, рубашка Calvin Klein Jeans, брюки Frame, ботинки Ecco, часы Montblanc
На переходе беспилотник притормозил, пропуская пешеходов, и ловко подгадал удобный момент, проехав между двумя группами. «Одна из самых сложных задач, над которыми мы работаем сейчас, состоит как раз в том, чтобы система понимала намерения пешеходов и других водителей», — прокомментировал глава группы разработчиков беспилотного автомобиля из «Яндекса» Дмитрий Полищук. Первая тревога перед поездкой по городу в «неуправляемой» машине рассеялась, прошло и раздражение на водителя черного внедорожника. В конце концов, мы всего лишь люди и даже на автомобильных роботов смотрим со своей биологической колокольни.
Между тем, с их точки зрения, управление машиной выглядит совершенно иначе. Самые сложные для нас маневры — движение в пробке или параллельная парковка — не представляют никаких трудностей для компьютера, способного сверхточно и быстро контролировать движения руля и педалей. Зато невероятно сложны для него задачи, которые мы решаем легко и походя, — например, угадать, не собирается ли пешеход внезапно перебежать дорогу, или немного отступить от правил, чтобы не создать опасную ситуацию.
 Ключевые органы чувств прототипа объединяет «сенсорный хаб», хотя в будущем они, видимо, будут разнесены и укрыты в обводах кузова.
Ключевые органы чувств прототипа объединяет «сенсорный хаб», хотя в будущем они, видимо, будут разнесены и укрыты в обводах кузова.
Неправильный «человеческий» взгляд на беспилотные автомобили не всегда безобиден. Скажем, автоматизированные системы помощи водителю, которыми оснащены электромобили Tesla, многие ошибочно принимают за полноценное беспилотное управление — и отсутствие контроля за машинами в режиме автопилота уже стало причиной нескольких аварий. Их продвинутый круиз-контроль способен удерживать дистанцию до впереди идущего транспорта или оставаться в своей полосе на трассе, но не сориентируется в сложном городском потоке. Международное сообщество автомобильных инженеров (SAE) различает пять уровней автоматизации транспорта, начиная с нулевого, при котором бортовой компьютер лишь уведомляет водителя о важных событиях. Самые совершенные из серийных моделей достигают третьего уровня, позволяя отдать управление роботу на трассах с неплотным и предсказуемым движением. Беспилотные автомобили пятого уровня автоматизации существуют лишь в виде проектов разной степени готовности — и все их можно пересчитать по пальцам. Таким машинам достаточно лишь указать точку назначения, в живом водителе они не нуждаются вовсе.
Локализация и восприятие
Базовые шаги вождения и для человека, и для компьютера одинаковы. Прежде всего нужно локализовать себя в пространстве, выяснить, где мы находимся, куда и какой дорогой едем. И люди, и роботы используют для этого датчики, воспринимающие объекты в окружающем пространстве. Эта информация анализируется и используется для предсказания дорожной ситуации в следующий момент. Наконец, планируется точная траектория движения, и готовые команды передаются на органы управления машиной. В беспилотном автопарке «Яндекса» их около десятка, почти все — Toyota Prius: эти изначально высококомпьютеризованные машины легко модифицируются под автоматизированное управление. Каждый робот получил собственное имя в честь одного из андроидов — героев фантастического сериала «Мир Дикого Запада». Нашего звали Тедди, его компьютер гудел под сетчатым — для лучшей вентиляции — дном багажника, на месте запасного колеса. Внешне он почти не отличается от серийных машин: передний и задний радары скрыты под бамперами, смонтированные на крыше лидары и камеры защищены пластиковым кожухом.
 Глазами машины Пример изображения, построенного на основе данных лидара
Глазами машины Пример изображения, построенного на основе данных лидара
Конкуренция между различными датчиками для беспилотных автомобилей — вопрос во многом надуманный. По словам Дмитрия Полищука, разные «органы чувств» Тедди не столько соперничают, сколько дополняют друг друга. Радары эффективны на больших дистанциях, до 100−150 м; лидары кругового обзора, быстро вращаясь, ощупывают ближнее пространство, позволяя измерить расстояние до нужной точки с сантиметровой точностью. На установленный в салоне экран выводятся целые облака этих точек, в которых даже человек легко различит очертания машины, велосипедиста или столба. Картинки с камер помогают беспилотнику и на близких, и на далеких дистанциях: распознавание образов на изображении — задача, прекрасно знакомая программистам «Яндекса».
«Технологии радаров и камер уже отработаны, они давно используются и в автомобилях с продвинутым круиз-контролем. Претензии к высокой стоимости и далеко не стопроцентной надежности лазерных лидаров тоже рано или поздно уйдут, — считает Дмитрий. — Беспилотники, которые лет через 5−10 начнут массово появляться на дорогах, будут, видимо, использовать все эти инструменты для ориентации в мире». Они помогут локализовать себя и на карте: обычные приемники GNSS позволяют лишь приблизительно узнать координаты, к тому же сигналы GPS, ГЛОНАСС и других систем навигации не всегда надежны. Зато картинки, полученные датчиками самого автомобиля, позволяют ему легко распознать знакомую улицу и, выстроив трехмерную модель, выяснить свое положение с точностью до сантиметра. Так ориентируемся и мы, люди, оглядываясь по сторонам и замечая привычные приметы местности.
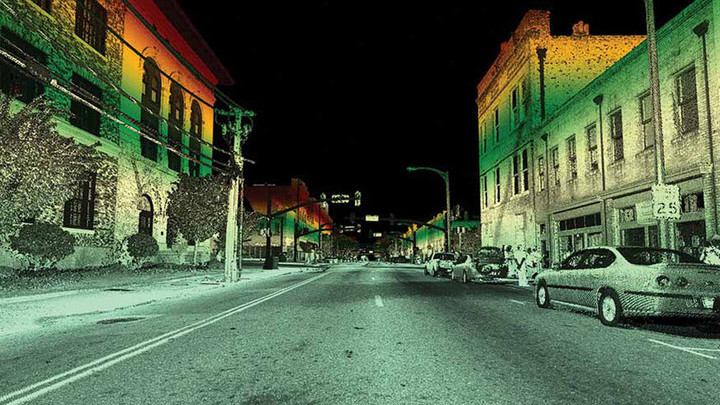
 Глазами машины Результаты работы системы распознавания, определившей пешеходов и автомобили на улице неподалеку от редакции «ПМ»
Глазами машины Результаты работы системы распознавания, определившей пешеходов и автомобили на улице неподалеку от редакции «ПМ»
Распознавание и предсказание
Сочетание независимых источников данных о мире позволяет вовремя скорректировать ошибки: тень, которую на камере можно принять за пешехода, будет правильно определена за счет работы дальномеров. Интегрировать и анализировать эти потоки информации в режиме реального времени помогает сочетание алгоритмов и нейросетей, которые строят и десятки раз в секунду обновляют трехмерную модель окружающего пространства. В их обучении приняли участие тысячи пользователей проекта «Яндекс.Толока» — они провели разметку необработанных данных, выделив на них автомобили, пешеходов, дорожные знаки и т. п. Натренированная на этом массиве система автоматически выстраивает упрощенные трехмерные модели — цилиндрические пешеходы, параллелепипеды автомобилей — оценивает их скорость и направление. Ей знакомы особенности движения разных типов объектов, которые дополняют данные датчиков. «Допустим, машину закрыл от нас какой-то щит, и на некоторое время она стала невидимой, — объясняет Дмитрий Полищук. — Трекер будет помнить, где она находилась и куда двигалась, и продолжит ее «вести»». Каждый объект отслеживается с момента появления и до тех пор, пока не исчезнет из поля зрения.
Исходя из этого, беспилотник формирует предсказания о дальнейших изменениях в обстановке. Эта задача требует понимания намерений других участников движения и остается едва ли не самой сложной для роботов-водителей. Поведение пешеходов может быть довольно непредсказуемым, и водители-люди часто угадывают его по позе и даже по выражению лица. Но, если мы с детства совершенствуем навыки взаимопонимания, компьютеры делают в этом лишь первые шаги. Часто в этом им помогают другие водители: их реакции позволяют беспилотнику скорректировать собственное поведение в соответствии с известным водительским правилом «следуй за потоком». Такой подход способен помочь и в сложных ситуациях планирования, в том числе с опасными маневрами.
www.popmech.ru
«Яндекс» показал собственный беспилотный автомобиль
Недавно «Яндекс» объявил, что планирует заняться разработкой автопилота собственной конструкции. Не прошло и года, как по Москве прокатился первый прототип беспилотного такси!
В феврале на официальном сайте «Яндекса» уже появились две вакансии: разработчика беспилотных автомобилей и разработчика-исследователя беспилотных автомобилей. Целью компании являлось «оказаться в числе первых в мире компаний, создавших технологию для беспилотного управления автомобилем».
Разработчику предстояло заниматься работой с сенсорами, контроллерами и активаторами автомобиля, создавать инфраструктуру для сбора и обработки потока данных с датчиков, заниматься продвинутой 3D-визуализацией данных, их проигрыванием и созданием симулятора окружающего мира, а также надёжно и эффективно реализовать алгоритмы управления автомобилем.
Разработчик-исследователь, в свою очередь, должен был заниматься сопоставлением потока данных с камер, лидаров и радаров, распознаванием светофоров, знаков, разметки и других участников движения, созданием структурной композиции окружающих объектов, их моделированием, отслеживанием и предсказанием перемещений, планированием манёвров беспилотника и их исполнением.
А теперь «Яндекс» продемонстрировал работу собственной системы автономного управления, созданной для сервиса «Яндекс.Такси». В программном обеспечении беспилотника на базе гибридного минивэна Toyota Prius Alpha использованы навигация, геолокация, компьютерное зрение и алгоритмы машинного обучения, которые применяются в «Яндекс.Навигаторе» и «Яндекс.Картах».
Система автономного вождения собрана из комплектующих, доступных на рынке — например, графического процессора Nvidia GTX, который отвечает за обработку поступающей информации, и лидара Velodyne, необходимого для слежения за окружающей обстановкой. На видео минивэн вполне самостоятельно катается по московской промзоне, забирая пассажира, объезжая препятствия, пропуская другие автомобили и уступая дорогу пешеходам. Испытания «Яндексмобиля» на дорогах общего пользования могут стартовать уже в нынешнем году.
www.popmech.ru
Беспилотный автомобиль Яндекс – устройство, испытания, перспективы
Беспилотный автомобиль Яндекс проходит испытания уже в городских условиях, в том числе зимних. Узнайте больше об устройстве и перспективах беспилотника Яндекс Такси.
Устройство беспилотника Яндекс
Компания Яндекс в устройстве беспилотного автомобиля использовала уже проверенные разработки других производителей. Главный принцип любого автомобиля без водителя – безопасность движения. Поэтому в беспилотнике Яндекса применена многоуровневая система безопасности и контроля за дорожной обстановкой.
Сканирование постоянно меняющейся ситуации вокруг автомобиля осуществляется целым набором модулей, рассчитанных на различную скорость движения и условия внешней среды. В число этих модулей входят:• стереоскопические камеры;• сканирующий оптический дальномер лидар;• радар дальнего действия;• приемники gps/ГЛОНАСС;• инерциальные измерители;• датчики скорости;• различные сенсоры;• графический процессор для обработки данных.
Все внешние датчики беспилотного автомобиля собирают и передают на обработку данные о своей зоне контроля, но при этом все зоны неоднократно перекрываются для составления полной картины.
К примеру, лидар собирает информацию о всех объектах в ближайшем окружении. А радар предназначен для оперативного контроля за дорогой на больших скоростях.
Главной проблемой для беспилотных автомобилей является правильное распознавание объектов, дорожных знаков, сигналов светофора и реагирование на них в соответствии с правилами дорожного движения.
В этом помогают разработки Яндекса в области компьютерного зрения и дополненной реальности. Блок обработки беспилотника постоянно сверяет имеющуюся в памяти информацию с реальной ситуацией на дороге. Это позволяет быстро реагировать на изменения и, одновременно, выдерживать нужное направление.
Испытания беспилотного Яндекс автомобиля
Испытания беспилотных автомобилей Яндекс начал в мае прошлого года с проезда по закрытой территории. Но уже вскоре беспилотники на базе Toyota Prius и Kia Soul вышли на улицы Москвы.
В феврале текущего года прошло испытание автомобиля Яндекс в зимних условиях, после снегопада. Конечно, улицы для проведения испытаний были выбраны уже очищенные от снега и с довольно слабым движением, однако на видео хорошо видно, что беспилотник безукоризненно реагирует на знаки светофора и пропускает автомобили справа, а также пешеходов.
Конечно, в реальной обстановке зимой часто возникают снежные колеи, особенно внутри дворов, с которыми с трудом справляются даже опытные водители. Но испытания беспилотников еще только начались, так что преодоление сложных ситуаций еще впереди.
Перспективы беспилотных Яндекс такси
Работа, которую проводит Яндекс в отношении беспилотных автомобилей, имеет свою особую ценность для компании. Проект Яндекс Такси показал свою успешность и развивается быстрыми темпами. Учитывая общую тенденцию внедрения беспилотного транспорта в мире, понятно стремление Яндекса не только не отстать от тенденций, но и стать одним из лидеров в этой области.
Способствуют этому и уже готовые действующие проекты – Яндекс Навигатор, Карты и Пробки, голосовой помощник. В принципе, это целый комплекс, части которого дополняют друг друга и активно используются водителями.
Поэтому нетрудно представить себе, что беспилотное Яндекс такси, рано или поздно, впишется в этот комплекс органичной составляющей. И тогда достаточно будет, сев в такой автомобиль, назвать нужный адрес и доехать до места назначения оптимальным путем за оптимальное время.
hifak.ru