Содержание
Hall-effect thruster — Wikipedia
6 kW Hall thruster in operation at the NASAJet Propulsion Laboratory
In spacecraft propulsion, a Hall-effect thruster (HET) is a type of ion thruster in which the propellant is accelerated by an electric field. Hall-effect thrusters (based on the discovery by Edwin Hall) are sometimes referred to as Hall thrusters or Hall-current thrusters. Hall-effect thrusters use a magnetic field to limit the electrons’ axial motion and then use them to ionize propellant, efficiently accelerate the ions to produce thrust, and neutralize the ions in the plume. The Hall-effect thruster is classed as a moderate specific impulse (1,600 s) space propulsion technology and has benefited from considerable theoretical and experimental research since the 1960s.[1]
Hall thrusters operate on a variety of propellants, the most common being xenon and krypton. Other propellants of interest include argon, bismuth, iodine, magnesium, zinc and adamantane.
Hall thrusters are able to accelerate their exhaust to speeds between 10 and 80 km/s (1,000–8,000 s specific impulse), with most models operating between 15 and 30 km/s. The thrust produced depends on the power level. Devices operating at 1.35 kW produce about 83 mN of thrust. High-power models have demonstrated up to 5.4 N in the laboratory.[2] Power levels up to 100 kW have been demonstrated for xenon Hall thrusters.
As of 2009, Hall-effect thrusters ranged in input power levels from 1.35 to 10 kilowatts and had exhaust velocities of 10–50 kilometers per second, with thrust of 40–600 millinewtons and efficiency in the range of 45–60 percent.[3]
The applications of Hall-effect thrusters include control of the orientation and position of orbiting satellites and use as a main propulsion engine for medium-size robotic space vehicles.[3]
Contents
- 1 History
- 2 Principle of operation
- 2.1 Propellants
- 2.
 1.1 Xenon
1.1 Xenon - 2.1.2 Krypton
- 2.
- 2.2 Variants
- 2.2.1 Cylindrical Hall thrusters
- 2.2.2 External discharge Hall thruster
- 2.1 Propellants
- 3 Applications
- 4 In development
- 5 References
- 6 External links
 1.1 Xenon
1.1 XenonHistory[edit]
Hall thrusters were studied independently in the United States and the Soviet Union. They were first described publicly in the US in the early 1960s.[4][5][6] However, the Hall thruster was first developed into an efficient propulsion device in the Soviet Union. In the US, scientists focused on developing gridded ion thrusters.
Two types of Hall thrusters were developed in the Soviet Union:
- thrusters with wide acceleration zone, SPT (Russian: СПД, стационарный плазменный двигатель; English: SPT, Stationary Plasma Thruster) at Design Bureau Fakel
- thrusters with narrow acceleration zone, DAS (Russian: ДАС, двигатель с анодным слоем; English: TAL, Thruster with Anode Layer), at the Central Research Institute for Machine Building (TsNIIMASH).

Soviet and Russian SPT thrusters
The SPT design was largely the work of A. I. Morozov.[7][8] The first SPT to operate in space, an SPT-50 aboard a Soviet Meteor spacecraft, was launched December 1971. They were mainly used for satellite stabilization in north–south and in east–west directions. Since then until the late 1990s 118 SPT engines completed their mission and some 50 continued to be operated. Thrust of the first generation of SPT engines, SPT-50 and SPT-60 was 20 and 30 mN respectively. In 1982, SPT-70 and SPT-100 were introduced, their thrusts being 40 and 83 mN, respectively. In the post-Soviet Russia high-power (a few kilowatts) SPT-140, SPT-160, SPT-200, T-160 and low-power (less than 500 W) SPT-35 were introduced.[9]
Soviet and Russian TAL-type thrusters include the D-38, D-55, D-80, and D-100.[9]
Soviet-built thrusters were introduced to the West in 1992 after a team of electric propulsion specialists from NASA’s Jet Propulsion Laboratory, Glenn Research Center, and the Air Force Research Laboratory, under the support of the Ballistic Missile Defense Organization, visited Russian laboratories and experimentally evaluated the SPT-100 (i. e., a 100 mm diameter SPT thruster). Over 200 Hall thrusters have been flown on Soviet/Russian satellites in the past thirty years. No failures have ever occurred on orbit. Hall thrusters continue to be used on Russian spacecraft and have also flown on European and American spacecraft. Space Systems/Loral, an American commercial satellite manufacturer, now flies Fakel SPT-100’s on their GEO communications spacecraft.
e., a 100 mm diameter SPT thruster). Over 200 Hall thrusters have been flown on Soviet/Russian satellites in the past thirty years. No failures have ever occurred on orbit. Hall thrusters continue to be used on Russian spacecraft and have also flown on European and American spacecraft. Space Systems/Loral, an American commercial satellite manufacturer, now flies Fakel SPT-100’s on their GEO communications spacecraft.
Since their introduction to the West in the early 1990s, Hall thrusters have been the subject of a large number of research efforts throughout the United States, France, Italy, Japan, and Russia (with many smaller efforts scattered in various countries across the globe). Hall thruster research in the US is conducted at several government laboratories, universities and private companies. Government and government funded centers include NASA’s Jet Propulsion Laboratory, NASA’s Glenn Research Center, the Air Force Research Laboratory (Edwards AFB, CA), and The Aerospace Corporation. Universities include the US Air Force Institute of Technology,[10]University of Michigan, Stanford University, The Massachusetts Institute of Technology, Princeton University, Michigan Technological University, and Georgia Tech. A considerable amount of development is being conducted in industry, such as IHI Corporation in Japan, Aerojet and Busek in the US, SNECMA in France, LAJP in Ukraine, SITAEL in Italy, and Satrec Initiative in South Korea.
Universities include the US Air Force Institute of Technology,[10]University of Michigan, Stanford University, The Massachusetts Institute of Technology, Princeton University, Michigan Technological University, and Georgia Tech. A considerable amount of development is being conducted in industry, such as IHI Corporation in Japan, Aerojet and Busek in the US, SNECMA in France, LAJP in Ukraine, SITAEL in Italy, and Satrec Initiative in South Korea.
The first use of Hall thrusters on lunar orbit was the European Space Agency (ESA) lunar mission SMART-1 in 2003.
Hall thrusters were first demonstrated on a western satellite on the Naval Research Laboratory (NRL) STEX spacecraft, which flew the Russian D-55. The first American Hall thruster to fly in space was the Busek BHT-200 on TacSat-2 technology demonstration spacecraft. The first flight of an American Hall thruster on an operational mission, was the Aerojet BPT-4000, which launched August 2010 on the military Advanced Extremely High Frequency GEO communications satellite. At 4.5 kW, the BPT-4000 is also the highest power Hall thruster ever flown in space. Besides the usual stationkeeping tasks, the BPT-4000 is also providing orbit raising capability to the spacecraft. The X-37B has been used as a testbed for the Hall thruster for the AEHF satellite series.[11] Several countries worldwide continue efforts to qualify Hall thruster technology for commercial uses. The SpaceX Starlink constellation, the largest satellite constellation in the world, uses Hall thrusters. They are also included in the design of the Psyche spacecraft for asteroid exploration.
At 4.5 kW, the BPT-4000 is also the highest power Hall thruster ever flown in space. Besides the usual stationkeeping tasks, the BPT-4000 is also providing orbit raising capability to the spacecraft. The X-37B has been used as a testbed for the Hall thruster for the AEHF satellite series.[11] Several countries worldwide continue efforts to qualify Hall thruster technology for commercial uses. The SpaceX Starlink constellation, the largest satellite constellation in the world, uses Hall thrusters. They are also included in the design of the Psyche spacecraft for asteroid exploration.
Principle of operation[edit]
The essential working principle of the Hall thruster is that it uses an electrostatic potential to accelerate ions up to high speeds. In a Hall thruster, the attractive negative charge is provided by an electron plasma at the open end of the thruster instead of a grid. A radial magnetic field of about 100–300 G (0.01–0.03 T) is used to confine the electrons, where the combination of the radial magnetic field and axial electric field cause the electrons to drift in azimuth thus forming the Hall current from which the device gets its name.
Hall thruster. Hall thrusters are largely axially symmetric. This is a cross-section containing that axis.
A schematic of a Hall thruster is shown in the adjacent image. An electric potential of between 150 and 800 volts is applied between the anode and cathode.
The central spike forms one pole of an electromagnet and is surrounded by an annular space, and around that is the other pole of the electromagnet, with a radial magnetic field in between.
The propellant, such as xenon gas, is fed through the anode, which has numerous small holes in it to act as a gas distributor. As the neutral xenon atoms diffuse into the channel of the thruster, they are ionized by collisions with circulating high-energy electrons (typically 10–40 eV, or about 10% of the discharge voltage). Most of the xenon atoms are ionized to a net charge of +1, but a noticeable fraction (~20%) have +2 net charge.
The xenon ions are then accelerated by the electric field between the anode and the cathode. For discharge voltages of 300 V, the ions reach speeds of around 15 km/s (9.3 mps) for a specific impulse of 1,500 seconds (15 kN·s/kg). Upon exiting, however, the ions pull an equal number of electrons with them, creating a plasma plume with no net charge.
For discharge voltages of 300 V, the ions reach speeds of around 15 km/s (9.3 mps) for a specific impulse of 1,500 seconds (15 kN·s/kg). Upon exiting, however, the ions pull an equal number of electrons with them, creating a plasma plume with no net charge.
The radial magnetic field is designed to be strong enough to substantially deflect the low-mass electrons, but not the high-mass ions, which have a much larger gyroradius and are hardly impeded. The majority of electrons are thus stuck orbiting in the region of high radial magnetic field near the thruster exit plane, trapped in E×B (axial electric field and radial magnetic field). This orbital rotation of the electrons is a circulating Hall current, and it is from this that the Hall thruster gets its name. Collisions with other particles and walls, as well as plasma instabilities, allow some of the electrons to be freed from the magnetic field, and they drift towards the anode.
About 20–30% of the discharge current is an electron current, which does not produce thrust, thus limiting the energetic efficiency of the thruster; the other 70–80% of the current is in the ions. Because the majority of electrons are trapped in the Hall current, they have a long residence time inside the thruster and are able to ionize almost all of the xenon propellant, allowing mass use of 90–99%. The mass use efficiency of the thruster is thus around 90%, while the discharge current efficiency is around 70%, for a combined thruster efficiency of around 63% (= 90% × 70%). Modern Hall thrusters have achieved efficiencies as high as 75% through advanced designs.
Because the majority of electrons are trapped in the Hall current, they have a long residence time inside the thruster and are able to ionize almost all of the xenon propellant, allowing mass use of 90–99%. The mass use efficiency of the thruster is thus around 90%, while the discharge current efficiency is around 70%, for a combined thruster efficiency of around 63% (= 90% × 70%). Modern Hall thrusters have achieved efficiencies as high as 75% through advanced designs.
Compared to chemical rockets, the thrust is very small, on the order of 83 mN for a typical thruster operating at 300 V and 1.5 kW. For comparison, the weight of a coin like the U.S. quarter or a 20-cent Euro coin is approximately 60 mN. As with all forms of electrically powered spacecraft propulsion, thrust is limited by available power, efficiency, and specific impulse.
However, Hall thrusters operate at the high specific impulses that are typical for electric propulsion. One particular advantage of Hall thrusters, as compared to a gridded ion thruster, is that the generation and acceleration of the ions takes place in a quasi-neutral plasma, so there is no Child-Langmuir charge (space charge) saturated current limitation on the thrust density. This allows much smaller thrusters compared to gridded ion thrusters.
This allows much smaller thrusters compared to gridded ion thrusters.
Another advantage is that these thrusters can use a wider variety of propellants supplied to the anode, even oxygen, although something easily ionized is needed at the cathode.[12]
Propellants[edit]
Xenon[edit]
Xenon has been the typical choice of propellant for many electric propulsion systems, including Hall thrusters.[13] Xenon propellant is used because of its high atomic weight and low ionization potential. Xenon is relatively easy to store, and as a gas at spacecraft operating temperatures does not need to be vaporized before usage, unlike metallic propellants such as bismuth. Xenon’s high atomic weight means that the ratio of energy expended for ionization per mass unit is low, leading to a more efficient thruster.[14]
Krypton[edit]
Krypton is another choice of propellant for Hall thrusters. Xenon has an ionization potential of 12.1298 eV, while krypton has an ionization potential of 13. 996 eV.[15] This means that thrusters utilizing krypton need to expend a slightly higher energy per mole to ionize, which reduces efficiency. Additionally, krypton is a lighter ion, so the unit mass per ionization energy is further reduced compared to xenon. However, xenon can be more than ten times as expensive as krypton per kilogram, making krypton a more economical choice for building out satellite constellations like that of SpaceX’s Starlink, whose Hall thrusters are fueled with krypton.[16][17]
996 eV.[15] This means that thrusters utilizing krypton need to expend a slightly higher energy per mole to ionize, which reduces efficiency. Additionally, krypton is a lighter ion, so the unit mass per ionization energy is further reduced compared to xenon. However, xenon can be more than ten times as expensive as krypton per kilogram, making krypton a more economical choice for building out satellite constellations like that of SpaceX’s Starlink, whose Hall thrusters are fueled with krypton.[16][17]
Variants[edit]
Cylindrical Hall thrusters[edit]
An Exotrail ExoMG — nano (60W) Hall Effect Thruster firing in a vacuum chamber
Although conventional (annular) Hall thrusters are efficient in the kilowatt power regime, they become inefficient when scaled to small sizes. This is due to the difficulties associated with holding the performance scaling parameters constant while decreasing the channel size and increasing the applied magnetic field strength. This led to the design of the cylindrical Hall thruster. The cylindrical Hall thruster can be more readily scaled to smaller sizes due to its nonconventional discharge-chamber geometry and associated magnetic field profile.[18][19][20] The cylindrical Hall thruster more readily lends itself to miniaturization and low-power operation than a conventional (annular) Hall thruster. The primary reason for cylindrical Hall thrusters is that it is difficult to achieve a regular Hall thruster that operates over a broad envelope from ~1 kW down to ~100 W while maintaining an efficiency of 45-55%.[21]
This led to the design of the cylindrical Hall thruster. The cylindrical Hall thruster can be more readily scaled to smaller sizes due to its nonconventional discharge-chamber geometry and associated magnetic field profile.[18][19][20] The cylindrical Hall thruster more readily lends itself to miniaturization and low-power operation than a conventional (annular) Hall thruster. The primary reason for cylindrical Hall thrusters is that it is difficult to achieve a regular Hall thruster that operates over a broad envelope from ~1 kW down to ~100 W while maintaining an efficiency of 45-55%.[21]
External discharge Hall thruster[edit]
Sputtering erosion of discharge channel walls and pole pieces that protect the magnetic circuit causes failure of thruster operation. Therefore, annular and cylindrical Hall thrusters have limited lifetime. Although magnetic shielding has been shown to dramatically reduce discharge channel wall erosion, pole piece erosion is still a concern. [22] As an alternative, an unconventional Hall thruster design called external discharge Hall thruster or external discharge plasma thruster (XPT) has been introduced.[23][24][25] The external discharge Hall thruster does not possess any discharge channel walls or pole pieces. Plasma discharge is produced and sustained completely in the open space outside the thruster structure, and thus erosion-free operation is achieved.
[22] As an alternative, an unconventional Hall thruster design called external discharge Hall thruster or external discharge plasma thruster (XPT) has been introduced.[23][24][25] The external discharge Hall thruster does not possess any discharge channel walls or pole pieces. Plasma discharge is produced and sustained completely in the open space outside the thruster structure, and thus erosion-free operation is achieved.
Applications[edit]
An illustration of the Gateway in orbit around the Moon. The orbit of the Gateway will be maintained with Hall thrusters.
Hall thrusters have been flying in space since December 1971, when the Soviet Union launched an SPT-50 on a Meteor satellite.[26] Over 240 thrusters have flown in space since that time, with a 100% success rate.[27] Hall thrusters are now routinely flown on commercial LEO and GEO communications satellites, where they are used for orbital insertion and stationkeeping.
The first[failed verification] Hall thruster to fly on a western satellite was a Russian D-55 built by TsNIIMASH, on the NRO’s STEX spacecraft, launched on October 3, 1998.[28]
The solar electric propulsion system of the European Space Agency’s SMART-1 spacecraft used a Snecma PPS-1350-G Hall thruster.[29] SMART-1 was a technology demonstration mission that orbited the Moon. This use of the PPS-1350-G, starting on September 28, 2003, was the first use of a Hall thruster outside geosynchronous earth orbit (GEO). Like most Hall thruster propulsion systems used in commercial applications, the Hall thruster on SMART-1 could be throttled over a range of power, specific impulse, and thrust.[30] It has a discharge power range of 0.46–1.19 kW, a specific impulse of 1,100–1,600 s and thrust of 30–70 mN.
Many small satellites of the SpaceX Starlink cluster use krypton-fueled Hall thrusters for position-keeping and deorbiting. [17]
[17]
Tiangong space station is fitted with Hall-effect thrusters. Tianhe core module is propelled by both chemical thrusters and four ion thrusters,[31] which are used to adjust and maintain the station’s orbit. The development of the Hall-effect thrusters is considered a sensitive topic in China, with scientists «working to improve the technology without attracting attention».[citation needed] Hall-effect thrusters are created with crewed mission safety in mind with effort to prevent erosion and damage caused by the accelerated ion particles. A magnetic field and specially designed ceramic shield was created to repel damaging particles and maintain integrity of the thrusters. According to the Chinese Academy of Sciences, the ion drive used on Tiangong has burned continuously for 8,240 hours without a glitch, indicating their suitability for the Chinese space station’s designated 15-year lifespan.[32] This is the world’s first Hall thrusters on a human-rated mission. [33]
[33]
The Jet Propulsion Laboratory (JPL) granted exclusive commercial licensing to Apollo Fusion- led by Mike Cassidy, for its Magnetically Shielded Miniature, or MaSMi Hall thruster technology.[34] In January 2021, Apollo Fusion announced they had secured a contract with York Space Systems for an order of its latest iteration named the «Apollo Constellation Engine».[35]
The NASA mission to the asteroid Psyche will utilize xenon gas Hall Thrusters.[36] The electricity will come from the craft’s 75 square meter solar panels.[37]
NASA’s first Hall thrusters on a human-rated mission will be a combination of 6kW Hall thrusters provided by Busek and NASA Advanced Electric Propulsion System (AEPS) Hall thrusters. They will serve as the primary propulsion on Maxar’s Power and Propulsion Element (PPE) for the Lunar Gateway under NASA’s Artemis program.[38] The high specific impulse of Hall thrusters will allow for efficient orbit raising and station keep for the Lunar Gateway’s polar near-rectilinear halo orbit.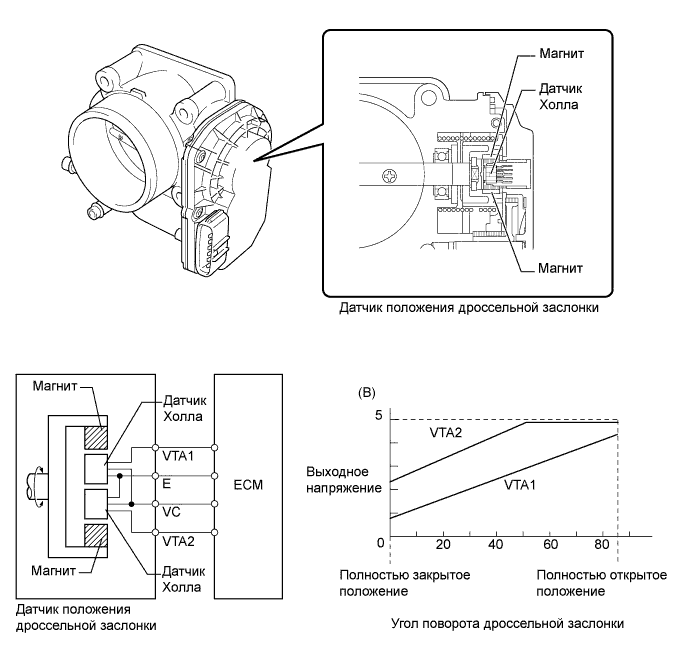 Overview of the Development and Mission Application of the Advanced Electric Propulsion System (AEPS). (PDF). Daniel A. Herman, Todd A. Tofil, Walter Santiago, Hani Kamhawi, James E. Polk, John S. Snyder, Richard R. Hofer, Frank Q. Picha, Jerry Jackson and May Allen. NASA; NASA/TM—2018-219761. 35th International Electric Propulsion Conference. Atlanta, Georgia, October 8–12, 2017. Accessed: 27 July 2018.
Overview of the Development and Mission Application of the Advanced Electric Propulsion System (AEPS). (PDF). Daniel A. Herman, Todd A. Tofil, Walter Santiago, Hani Kamhawi, James E. Polk, John S. Snyder, Richard R. Hofer, Frank Q. Picha, Jerry Jackson and May Allen. NASA; NASA/TM—2018-219761. 35th International Electric Propulsion Conference. Atlanta, Georgia, October 8–12, 2017. Accessed: 27 July 2018.
External links[edit]
- Edgar, Y. (2009). New Dawn for Electric Rockets
- SITAEL S.p.A. (Italy)—Page presenting Hall effect thruster products & data sheets
- Snecma SA (France) page on PPS-1350 Hall thruster
- Electric Propulsion Sub-Systems (PDF)
- Stationary plasma thrusters Archived 2019-07-11 at the Wayback Machine (PDF)
- ESA page on Hall thrusters
- Apollo Fusion
- «How the Hall Effect Still Reverberates». IEEE Spectrum. 2022-01-28.
Холловский двигатель (двигатель на основе эффекта Холла)
Производство двигателей и турбин Производство машин и оборудования Прорывные технологии
Холловский двигатель (двигатель на основе эффекта Холла).
Холловский двигатель (двигатель на основе эффекта Холла) является одной из разновидностей электростатического ракетного двигателя. Он позволяет получить более высокую плотность тяги, более высокие значения расхода рабочего тела, и, как следствие, более высокую тягу двигателя, чем ионный двигатель.
Устройство и принцип работы холловского двигателя
Схема холловского двигателя
Отличия и преимущества холловского двигателя по сравнению с ионным
Примерные технические характеристики холловского двигателя
Устройство и принцип работы холловского двигателя:
Холловский двигатель (двигатель на основе эффекта Холла) – это одна разновидностей электростатического ракетного двигателя, в котором используется эффект Холла. Двигатели на основе эффекта Холла используются на космических аппаратах с 1972 года.
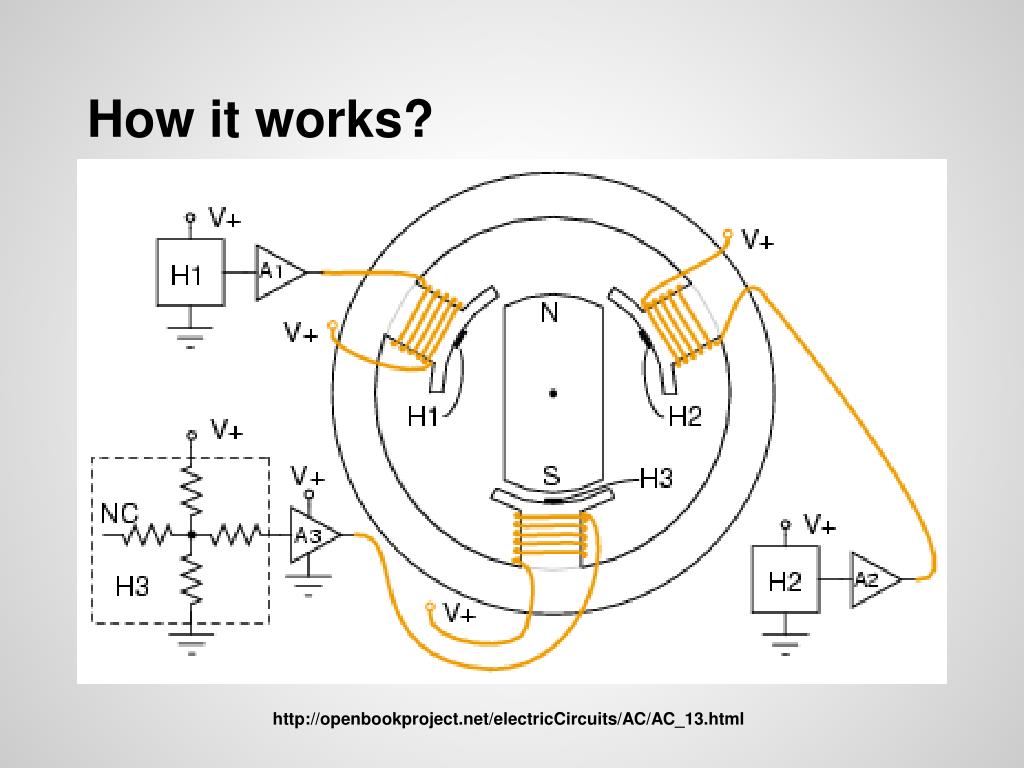
В основе принципа работы данного двигателя лежит эффект Холла, открытый в 1879 г. Эдвином Холлом (Edwin H. Hall). Он заключается в том, что в проводнике, в котором созданы взаимно перпендикулярные электрическое и магнитное поля, возникает электрический ток (называемый холловским) в направлении, перпендикулярном обоим этим полям. Иными словами, если электрическое и магнитное поля имеют направления соответственно по осям X и Y, то электрический (холловский) ток имеет направление вдоль оси Z.
Эдвином Холлом (Edwin H. Hall). Он заключается в том, что в проводнике, в котором созданы взаимно перпендикулярные электрическое и магнитное поля, возникает электрический ток (называемый холловским) в направлении, перпендикулярном обоим этим полям. Иными словами, если электрическое и магнитное поля имеют направления соответственно по осям X и Y, то электрический (холловский) ток имеет направление вдоль оси Z.
Холловский двигатель состоит из кольцевой камеры. Иными словами, камера двигателя выполнена в форме кольца (цилиндра). С одной стороны в камеру подаётся рабочее тело, с другой стороны происходит истекание плазмы. Внутри двигателя располагается анод (положительный электрод), катод (отрицательный электрод) расположен снаружи двигателя. По внешней стороне кольца располагаются магниты.
Между анодом и катодом создается разность потенциалов. В кольцевую камеру подаётся рабочее тело (например, ксенон). Разряд между анодом и катодом ионизирует рабочее тело, отрывая электроны от нейтральных атомов газа. Под действием электростатического поля положительные ионы газа (плазма) разгоняются в осевом направлении – в направлении выходного отверстия цилиндрического двигателя. На выходе из двигателя происходит нейтрализация положительного заряда плазмы электронами, эмитируемыми с катода. Истечение положительных ионов из выходного отверстия создает тягу.
Под действием электростатического поля положительные ионы газа (плазма) разгоняются в осевом направлении – в направлении выходного отверстия цилиндрического двигателя. На выходе из двигателя происходит нейтрализация положительного заряда плазмы электронами, эмитируемыми с катода. Истечение положительных ионов из выходного отверстия создает тягу.
В радиальном направлении действует магнитная сила, которая в соответствии с эффектом Холла приводит к появлению электрического тока, движущегося в азимутальном направлении (т.е. вокруг центрального электрода, оси двигателя). Холловский ток создается движением электронов в электрическом и магнитном полях.
В холловском двигателе тяга создается также с помощью холловского тока, пересекающего радиальное магнитное поле. Их взаимодействие заставляет электроны обращаться вокруг оси двигателя. Эти электроны выбивают электроны из атомов ксенона, создавая ионы ксенона, которые осевое электрическое поле ускоряет в направлении выходного отверстия двигателя. Электроны холловского тока под действием силы Лоренца (возникающей в результате взаимодействия приложенного радиального магнитного поля с электрическим холловским током) создают дополнительную тягу и вырываются наружу в выходное отверстие вместе с положительными ионами.
Электроны холловского тока под действием силы Лоренца (возникающей в результате взаимодействия приложенного радиального магнитного поля с электрическим холловским током) создают дополнительную тягу и вырываются наружу в выходное отверстие вместе с положительными ионами.
Двигатель на основе эффекта Холла позволяет получить более высокую плотность тяги, более высокие значения расхода рабочего тела, и, как следствие, более высокую тягу двигателя, чем ионный двигатель, поскольку в истекающем потоке содержатся и положительные ионы, и электроны, что предотвращает накопление объемного заряда, уменьшающего напряженность ускоряющего электрического поля.
В зависимости от располагаемой мощности скорости истечения рабочего тела могут составлять от 10 до 50 км/с.
Схема холловского двигателя:
Рис. 1. Устройство холловского двигателя
http://go2starss.narod.ru/pub/E025_ID.html
Отличия и преимущества холловского двигателя по сравнению с ионным:
– двигатель на основе эффекта Холла при равных размерах имеет большую тягу, чем ионный, поэтому способен разгонять космический аппарат до высоких скоростей быстрее, чем ионный двигатель сравнимого размера.
Примерные технические характеристики холловского двигателя:
| Характеристики: | Значение: |
| Потребляемая мощность, кВт | 1,35-10 |
| Скорость истечения ионов, км/с | 10-50 |
| Тяга, мН | 40-600 |
| КПД, % | 45-60 |
| Время непрерывной работы, лет | более 3 |
Источник: http://cyclowiki.org/wiki/Холловский_двигатель, http://go2starss.narod.ru/pub/E025_ID.html
© Фото https://www.pexels.com, https://pixabay.com, http://go2starss.narod.ru/pub/E025_ID.html
Коэффициент востребованности
1 642
Реактивный двигатель на основе эффекта холла
Изобретение относится к двигателям на эффекте Холла. Двигатель содержит резервуар (101) газа под высоким давлением, модуль (103) регулирования давления, устройство (105) управления расходом газа, канал ионизации, катод (40А, 40В), расположенный вблизи выпускного отверстия канала ионизации, анод, связанный с каналом ионизации, блок (110) электропитания, электрический фильтр (120) и катушки (31, 32) создания магнитного поля вокруг канала (21) ионизации. Также двигатель на эффекте Холла содержит дополнительный блок (125) электропитания, предназначенный для приложения пульсирующего напряжения между анодом (25) и катодом (40А, 40Е). При этом указанный дополнительный блок (125) электропитания поочередно создает первое напряжение разряда в течение первого промежутка времени величиной 5-15 мкс и второе напряжение разряда в течение второго промежутка времени величиной 5-15 мкс. Техническим результатом изобретения является повышение удельного импульса и увеличение срока службы при значительном снижении эрозии разрядного канала.7 з.п. ф-лы, 4 ил.
Также двигатель на эффекте Холла содержит дополнительный блок (125) электропитания, предназначенный для приложения пульсирующего напряжения между анодом (25) и катодом (40А, 40Е). При этом указанный дополнительный блок (125) электропитания поочередно создает первое напряжение разряда в течение первого промежутка времени величиной 5-15 мкс и второе напряжение разряда в течение второго промежутка времени величиной 5-15 мкс. Техническим результатом изобретения является повышение удельного импульса и увеличение срока службы при значительном снижении эрозии разрядного канала.7 з.п. ф-лы, 4 ил.
Область техники, к которой относится изобретение
Настоящее изобретение относится к двигателю на эффекте Холла, называемому также стационарным плазменным двигателем.
Уровень техники
Говоря в общих чертах, двигатель на эффекте Холла содержит канал ионизации и разряда, связанный с анодом, и катод, расположенный вблизи выпускного отверстия этого канала. Канал ионизации и разряда выполнен из изоляционного материала, такого как керамика, и окружен магнитопроводом и электромагнитными катушками. В канал ионизации и разряда, а также в катод, впрыскивают инертный газ, например ксенон. Инертный газ ионизируется в канале ионизации и разряда в результате столкновения с электронами, испускаемыми катодом. Полученные ионы ускоряются и выбрасываются осевым электрическим полем, образованным между анодом и катодом. Магнитопровод и электромагнитные катушки создают внутри канала по существу радиальное магнитное поле.
Фиг.2 схематично в осевом сечении изображает иллюстративный пример двигателя на эффекте Холла с замкнутым дрейфом электронов.
На фиг.2 показаны кольцевой канал 21, ограниченный элементом 22 из изоляционного материала, такого как диэлектрическая керамика, магнитопровод 24, содержащий внешние и внутренние кольцевые полюсы 24а и 24b, магнитное ярмо 24d, расположенное на верхнем по потоку конце двигателя, и центральный сердечник 24с, соединяющий между собой кольцевые полюсы 24а, 24b и магнитное ярмо 24d. Катушки 31, 32 позволяют создать в кольцевом канале 21 магнитное поле. Полый катод подсоединен к устройству подачи ксенона для формирования облака плазмы перед расположенным внизу по потоку выпускным отверстием канала 21. Анод 25 установлен в кольцевом канале 21 и связан с кольцевым распределителем 27 ионизируемого газа (ксенона). Двигатель во всей совокупности своих элементов защищен корпусом 20.
На фиг.2 символами обозначены линии B магнитного поля, электрическое поле E, атомы а, ионы i и электроны е, создающиеся из впрыскиваемого ионизируемого газа.
В двигателе на эффекте Холла, таком как показан на фиг.2, атомы рабочего тела, например ксенона, ионизируются посредством разряда, ограниченного каналом 21. Возникающие ионы i ускоряются в электрическом поле E, создаваемом анодом 25, и выбрасываются через расположенное ниже по потоку выпускное отверстие 26 кольцевого канала 21, обеспечивая тем самым тягу.
Благодаря комбинации из по существу осевого электрического поля E и по существу радиального магнитного поля B внутри канала 21 возникает азимутальный электронный ток силой в несколько десятков ампер.
Примеры выполнения двигателя на эффекте Холла можно посмотреть в документах FR 2693770, FR 2743191, FR 2782884 и FR 2788084.
Между тем функционирование двигателей на эффекте Холла сопряжено с двумя следующими ограничительными факторами.
Первый заключается в ограниченном сроке службы, обусловленном эрозией керамики разрядного канала. Дело в том, что часть ионов, создаваемых двигателем, ускоряется в разрядном канале в направлении стенок двигателя. Эти ионы вследствие их энергии вызывают эрозию керамики разрядного канала и тем самым снижают срок службы двигателя.
Второй фактор состоит в уменьшении КПД двигателя и в его ускоренном старении при высоких удельных импульсах (Isp). Повышение удельного импульса стационарного плазменного двигателя происходит по существу благодаря увеличению напряжения Ud разряда. Это приводит к генерированию более горячей плазмы, которая интенсивно взаимодействует со стенками разрядного канала. При таких обстоятельствах энергия электронов значительно повышается, вплоть до уровней, несовместимых с керамикой канала двигателя. Более высокая скорость ионов также способствует интенсификации эрозии керамики двигателя.
По этим причинам до настоящего времени считалось необходимым использовать такие двигатели на эффекте Холла, которые характеризуются ограниченным удельным импульсом, составляющим в типовом случае порядка 1000-2500 секунд.
Для повышения срока службы двигателя на эффекте Холла было предложено выполнять разрядные каналы линейно перемещаемыми. Соответственно, если камера становится эродированной, керамику разрядного канала следует подвинуть вдоль оси двигателя. Однако это все же не позволяет решить проблемы, ограничивающие функционирование при высоком напряжении.
Из уровня техники также известны ионные двигатели с бомбардировкой, которые содержат сетки для ускорения ионов и могут функционировать с удельными импульсами выше 4000 секунд. Однако использование решеток связано с рядом недостатков.
Раскрытие изобретения
Задачей настоящего изобретения является устранение недостатков известных плазменных двигателей и, в частности, модификация двигателей на эффекте Холла или плазменного двигателя с замкнутым дрейфом электронов с целью улучшения их технических характеристик, а именно повышения удельного импульса и увеличения срока службы при значительном снижении эрозии разрядного канала.
Решение поставленных задач достигается за счет создания двигателя на эффекте Холла, содержащего по меньшей мере один резервуар газа под высоким давлением, модуль регулирования давления, устройство управления расходом газа, канал ионизации, по меньшей мере один катод, расположенный вблизи выпускного отверстия канала ионизации, анод, связанный с каналом ионизации, блок электропитания, электрический фильтр и катушки создания магнитного поля вокруг канала ионизации, причем данный двигатель характеризуется тем, что он также содержит дополнительный блок электропитания, предназначенный для приложения пульсирующего напряжения между анодом и указанным по меньшей мере одним катодом, при этом данный дополнительный блок электропитания поочередно создает первое напряжение (Udmin) разряда в течение первого промежутка (ttot-tj/A) времени величиной 5-15 мкс и второе напряжение (Udmax) разряда в течение второго промежутка (tj/A) времени величиной 5-15 мкс.
В предпочтительном случае указанный дополнительный блок электропитания поочередно создает первое напряжение (Udmin) разряда величиной 150-250 В и второе напряжение (Udmax) разряда величиной 300-1200 В.
Согласно предпочтительному варианту изобретения, указанный первый промежуток (ttot-tj/A) времени составляет 5-10 мкс, и указанный второй промежуток (tj/A) времени составляет 5-10 мкс.
В предпочтительном случае первое указанное первое напряжение (Udmin) разряда составляет 180-220 В, а указанное второе напряжение (Udmax) разряда составляет 400-1000 В.
Указанный дополнительный блок электропитания может содержать по меньшей мере один конденсатор.
Согласно одному из частных вариантов изобретения, указанный дополнительный блок электропитания поочередно создает первое напряжение (Udmin) разряда и второе напряжение (Udmax) разряда соответственно в течение первого промежутка (ttot-tj/A) времени и второго промежутка (tj/A) времени, которые по существу равны.
Согласно особенному аспекту изобретения, указанные катушки создания магнитного поля питаются от блока электропитания и электрического фильтра независимо от анода, запитываемого от дополнительного блока электропитания и электрического фильтра.
Краткое описание графических материалов
Другие особенности и преимущества изобретения становятся более понятными из последующего рассмотрения конкретных вариантов его выполнения, приведенных в качестве иллюстративных примеров неограничительного характера и раскрытых со ссылкой на прилагаемые чертежи, на которых:
фиг.1 изображает блок-схему предложенного двигателя на эффекте Холла, соединенного с системой его электропитания,
фиг.2 схематично изображает в осевом разрезе пример двигателя на эффекте Холла, к которому применимы принципы настоящего изобретения,
фиг.3 изображает графики изменения тока I разряда и средней плотности N газа во времени, имеющие форму низкочастотных колебаний и приведенные в отношении двигателя на эффекте Холла, к которому применимы принципы настоящего изобретения,
и фиг. 4 изображает график изменения напряжения Ud разряда во времени, которое в соответствии с изобретением поочередно изменяется между высоким напряжением Udmax и низким напряжением Udmin.
4 изображает график изменения напряжения Ud разряда во времени, которое в соответствии с изобретением поочередно изменяется между высоким напряжением Udmax и низким напряжением Udmin.
Осуществление изобретения
Изобретение относится к двигателю на эффекте Холла, базовая конструкция которого была описана выше со ссылкой на фиг.2.
Хотя двигатель на эффекте Холла часто называют «стационарным плазменным двигателем», его функционирование отнюдь не является стационарным. Здесь могут рассматриваться множество диапазонов частот, от 20 кГц до нескольких гигагерц.
При работе на низкой частоте обычный двигатель на эффекте Холла характеризуется следующими фазами:
a) заполнение разрядного канала инертными атомами рабочего тела, такого как ксенон,
b) ионизация инертных атомов посредством энергетических электронов в нижней по потоку половине двигателя,
c) ускорение и выброс ионов, созданных электрическим полем Е, которое пропорционально напряжению Ud разряда в двигателе.
Один и тот же трехфазный цикл повторяют периодически.
На фиг.3 представлена упрощенная модель колебаний в двигателе на эффекте Холла.
На фиг.3 показаны ток 1 разряда как функция времени (кривая 1) и средняя плотность N газа как функция времени (кривая 2).
Четко видны колебания фронта ионизации/ускорения, являющиеся результатом колебания плотности инертного газа.
Таким образом, двигатель на эффекте Холла характеризуется чередованием фронта ионизации/ускорения, выбрасывающего ионизированный инертный газ, и фронта не ионизированного инертного газа, заполняющего разрядную камеру двигателя.
В обычном двигателе на эффекте Холла напряжение Ud разряда двигателя зафиксировано на предварительно заданном уровне, достаточно высоком для того, чтобы обеспечить получение горячих электронов, способных к хорошей ионизации, и ускорение ионов под действием интенсивного электрического поля.
В обычных двигателях на эффекте Холла напряжение Ud разряда поддерживается по существу постоянным в ходе всего функционирования. Как отмечено выше, величину этого напряжения Ud выбирают на уровне, который позволяет ограничить скорость эрозии керамики разрядного канала (в типовом случае оно составляет около 300-350 вольт), однако это приводит также к ограничению получаемого удельного импульса.
Как отмечено выше, величину этого напряжения Ud выбирают на уровне, который позволяет ограничить скорость эрозии керамики разрядного канала (в типовом случае оно составляет около 300-350 вольт), однако это приводит также к ограничению получаемого удельного импульса.
Предложенный двигатель на эффекте Холла позволяет получить высокий удельный импульс без соответствующего повышения интенсивности эрозии керамики разрядного канала и без необходимости модификации механической конструкции двигателя.
Для этого в ходе функционирования предложенного двигателя на эффекте Холла обеспечивают пульсацию напряжения Ud разряда двигателя для управления распространением фронта ионизации/ускорения двигателя путем снижения амплитуды пространственных колебаний потребления инертных атомов в двигателе.
Это обстоятельство, за счет периодического снижения напряжения разряда, предотвращает формирование и последующее ускорение ионов в зоне, находящейся слишком далеко вверх по потоку в канале двигателя, а следовательно — существенно нивелирует условия для эрозии канала.
Фиг.4 иллюстрирует функционирование двигателя с напряжением Ud разряда, колеблющимся с течением времени между низким напряжением разряда, равным Udmin, и высоким напряжением разряда, равным Udmax (кривая 3).
Вначале напряжение Ud разряда устанавливают на низкой величине, равной Udmin. Когда канал двигателя заполняется инертными атомами, напряжение Ud разряда устанавливают на высокой величине, равной Udmax, в течение времени tj/A, которое может составлять, например, от 5 до 15 мкс, более предпочтительно от 5 до 10 мкс, причем хорошие результаты дает величина вблизи 10 мкс.
Общее время ttot цикла с высокой величиной Udmax напряжения разряда и с низкой величиной Udmin напряжения разряда обусловлено скоростью заполнения канала двигателя инертными атомами и может составлять, например, от 10 до 30 мкс, более предпочтительно от 10 до 20 мкс, причем хорошие результаты дает величина вблизи 20 мкс.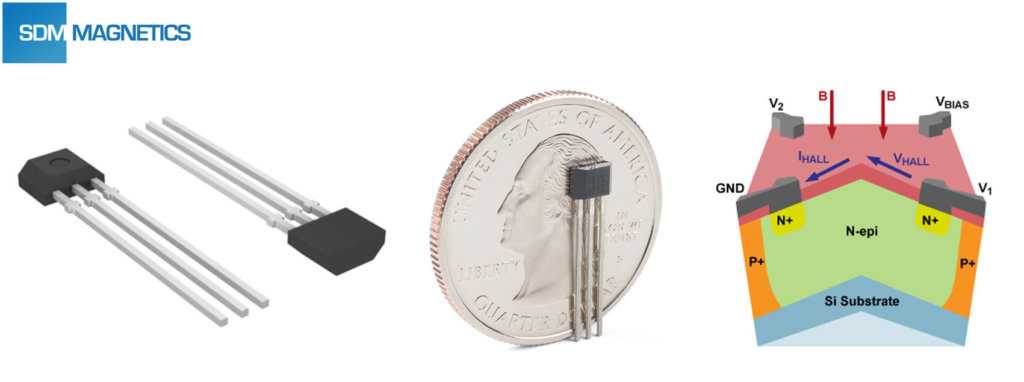
Напряжение Udmin может составлять, например, от 150 до 250 В, более предпочтительно от 180 до 220 В.
Напряжение Udmax может составлять, например, от 300 до 1200 В, более предпочтительно от 400 до 1000 В.
На фиг.4 представлен пример функционирования с пульсацией, при котором временные промежутки tj/A и ttot-tj/A, в течение которых напряжение разряда равно соответственно Udmax и Udmin, по существу равны друг другу. Однако данное условие не является обязательным.
Частота колебаний величины Ud между минимальной величиной Udmin и максимальной величиной Udmax зависит от заданной величины напряжения Udmax, которое затем определяет величину удельного импульса двигателя.
На фиг.1 в виде блок-схемы показана общая архитектура предложенного двигателя на эффекте Холла, оснащенного системами его питания газом и электричеством.
Резервуар 101 способного к ионизации газа, такого как ксенон, подсоединен трубопроводом 102 к модулю 103 регулирования давления, который подсоединен трубопроводом 104 к устройству 105 управления расходом газа, предназначенному для питания через гибкие трубопроводы 106, 107, 108 катодов 40А и 40В, а также газораспределителя внутри корпуса 20, в котором заключен разрядный канал. Использование двух катодов 40А и 40В вместо одного катода не является обязательным, просто данное решение предусматривает резерв из соображений надежности.
Использование двух катодов 40А и 40В вместо одного катода не является обязательным, просто данное решение предусматривает резерв из соображений надежности.
Основной блок 110 электропитания подключен соединениями 121 к электрическому фильтру 120, используемому для подачи питания по соединениям 123 на 20 катушки, которые расположены в корпусе 20 и предназначены для создания магнитного поля вокруг канала ионизации и разряда. Непосредственное соединение 122 между основным блоком 110 и устройством 105 управления расходом газа позволяет управлять этим устройством.
Основной блок 110 электропитания получает по линиям 111, 112, 113 электроэнергию, вырабатываемую внешним источником, таким как солнечные панели, и преобразует эту электроэнергию, которая в типичном случае может поставляться с напряжением 50 В, в электроэнергию более высокого напряжения, порядка нескольких сот вольт.
Основной блок 110 электропитания содержит цепи генерирования аналогового управляющего сигнала, который подается по линии 122 на устройство 105 управления расходом газа.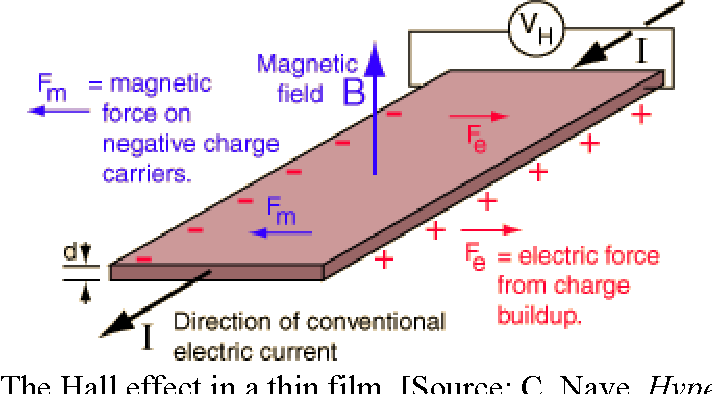
Основной блок 110 электропитания получает по линии 114 данные, поставляемые цепью 115 управления, связанной с модулем 103 регулирования давления газа, подаваемого на устройство 105 управления расходом газа от газового резервуара 101.
Цепь 115 управления получает по линиям 118, 119 данные с датчиков о состоянии клапанов модуля 103 регулирования давления газа, а по линиям 116, 117 получает внешние данные. Данные, передаваемые от цепи управления 115 по линии 114 к основному блоку 110 электропитания, позволяют вырабатывать указанный аналоговый управляющий сигнал, подаваемый по линии 122 на устройство 105 управления расходом газа.
Дополнительный блок 125 электропитания, подсоединенный к основному блоку 110 электропитания, обеспечивает по линиям 126, 126А и через фильтр 120 электропитание для анода, заключенного в корпусе 20.
Этот дополнительный блок 125 электропитания, взаимодействующий с катодами 40А, 40В и анодом 25 для создания электрического поля, подает вместе с фильтром 120 пульсирующее напряжение к аноду и каждому из катодов 40А, 40В, тогда как электромагнитные катушки, заключенные в корпусе 20, запитываются параллельно от основного блока 110 электропитания и фильтра 120.
Дополнительный блок 125 электропитания позволяет создавать два различных уровня напряжения, а именно напряжение низкого уровня, например около 200 В, и напряжение высокого уровня порядка нескольких сот вольт, вплоть до примерно 1200 вольт.
В качестве примера укажем, что ток может иметь силу в 2 А при низком напряжении 200 В и силу в 7 А при высоком напряжении 400 В.
Энергия, запасенная в дополнительном блоке 125 электропитания, должна высвобождаться в точно определенные моменты. В качестве примера укажем, что частота соседних разрядов может быть близка к 1000 кГц с полным циклом в течение периода в 20 мкс.
Дополнительный блок 125 электропитания может содержать конденсаторы в несколько микрофарад или несколько десятков микрофарад для накопления и сброса (например, за цикл в 20 мкс (50 кГц)) электрического заряда, соответствующего 7 А, в течение 10 мкс или электрического заряда в 70 микроампер-секунд (мкАс).
Регулирование и управление зарядом и разрядом конденсаторов дополнительного блока 125 электропитания обеспечивается цепями управления, связанными с дополнительным блоком 125 электропитания или встроенными в основной блок 110 электропитания таким образом, чтобы позволять этому дополнительному блоку 125 электропитания обеспечивать поочередно два разных уровня мощности.
Первый уровень мощности соответствует низкой мощности, которая позволяет заполнить разрядный канал инертными атомами, тогда как второй уровень мощности соответствует высокой мощности, например, подаче тока 7-10 А при напряжении 400 В — 1 кВ в течение промежутка времени 5-10 мкс, что для каждого импульса высокой мощности соответствует энергии, которая в типичном случае может составлять от 14 мДж (7 А, 400 В и 5 мкс) до 100 мДж (10 А, 1 кВ и 10 мкс) для диапазона величин, считающихся предпочтительными, хотя и не ограничительными.
Уровень высокой мощности соответствует процессу ионизации/ускорения в разрядном канале двигателя. Тот факт, что уровень высокой мощности пульсирует, позволяет выбирать его достаточно высокие величины, которые приводят к высоким удельным импульсам без уменьшения срока службы двигателя.
Говоря в общих чертах, основной блок 110 электропитания и дополнительный блок 125 электропитания образованы электрическими цепями, которые предназначены для того, чтобы, во-первых, подводить низкую мощность к устройству 105 управления расходом газа, а во-вторых, подводить высокую мощность к электромагнитным катушкам, находящимся в корпусе 20, и также к катодам 40А и 40В, взаимодействующим с анодом 25. Основной блок 110 электропитания и дополнительный блок 125 электропитания составляют по меньшей мере два отдельных модуля питания, соединенных последовательно и/или параллельно, вследствие чего становится возможным переход между двумя уровнями мощности, требуемыми для желаемого функционирования двигателя.
Основной блок 110 электропитания и дополнительный блок 125 электропитания составляют по меньшей мере два отдельных модуля питания, соединенных последовательно и/или параллельно, вследствие чего становится возможным переход между двумя уровнями мощности, требуемыми для желаемого функционирования двигателя.
Фильтр 120 может быть образован фильтрующими элементами, размещенными в модулях питания, являющихся компонентами блоков 110 и 125, чтобы защитить их от эффектов электромагнитной совместимости (ЕМС), возникающих из-за двигателя.
1. Двигатель на эффекте Холла, содержащий по меньшей мере один резервуар (101) газа под высоким давлением, модуль (103) регулирования давления, устройство (105) управления расходом газа, канал (21) ионизации, по меньшей мере один катод (40А, 40В), расположенный вблизи выпускного отверстия канала (21) ионизации, анод (25), связанный с каналом (21) ионизации, блок (110) электропитания, электрический фильтр (120) и катушки (31, 32) создания магнитного поля вокруг канала (21) ионизации, отличающийся тем, что он также содержит дополнительный блок (125) электропитания, предназначенный для приложения пульсирующего напряжения между анодом (25) и указанным по меньшей мере одним катодом (40А, 40Е), при этом данный дополнительный блок (125) электропитания поочередно создает первое напряжение (Udmin) разряда в течение первого промежутка (ttot-tj/A) времени величиной 5 — 15 мкс и второе напряжение (Udmax) разряда в течение второго промежутка (tj/A) времени величиной 5-15 мкс.
2. Двигатель по п.1, отличающийся тем, что указанный дополнительный блок (125) электропитания поочередно создает первое напряжение (Udmin) разряда величиной 150-250 В и второе напряжение (Udmax) разряда величиной 300-1200 В.
3. Двигатель по п.1, отличающийся тем, что указанный первый промежуток (ttot-tj/A) времени составляет 5-10 мкс, и указанный второй промежуток (tj/A) времени составляет 5-10 мкс.
4. Двигатель по п.1, отличающийся тем, что указанное первое напряжение (Udmin) разряда составляет 180-220 В, а указанное второе напряжение (Udmax) разряда составляет 400-1000 В.
5. Двигатель по п.1, отличающийся тем, что указанный дополнительный блок (125) электропитания содержит по меньшей мере один конденсатор.
6. Двигатель по п.1, отличающийся тем, что указанный дополнительный блок (125) электропитания поочередно создает первое напряжение (Udmin) разряда и второе напряжение (Udmax) разряда соответственно в течение первого промежутка (ttot-tj/A) времени и второго промежутка (tj/A) времени, которые по существу равны.
7. Двигатель по п.1, отличающийся тем, что указанные катушки (31, 32) создания магнитного поля питаются от блока (110) электропитания и электрического фильтра (120) независимо от анода (25), запитываемого от дополнительного блока (125) электропитания и электрического фильтра (120).
8. Двигатель по п.1, отличающийся тем, что указанный канал (21) ионизации ограничен стенкой (22), выполненной из керамического материала.
Подруливающее устройство на эффекте Холла
Холловское подруливающее устройство мощностью 2 кВт в работе в рамках эксперимента Холловского двигателя на Принстонская лаборатория физики плазмы
В двигательная установка космического корабля, а Подруливающее устройство на эффекте Холла (HET) является разновидностью ионный двигатель в которой пропеллент ускоряется электрическое поле. Эффект Холла двигатели используют магнитное поле чтобы ограничить осевое движение электронов, а затем использовать их для ионизации топлива, эффективно ускорить ионы производить толкать, и нейтрализует ионы в шлейфе. Двигатели на эффекте Холла (на основе открытия Эдвин Холл ) иногда называют Подруливающие устройства холла или же Холловские двигатели. Двигатель на эффекте Холла классифицируется как умеренный удельный импульс (1,600 s) космическая двигательная установка, и с 1960-х годов в ней проводились значительные теоретические и экспериментальные исследования.[1]
Двигатели на эффекте Холла (на основе открытия Эдвин Холл ) иногда называют Подруливающие устройства холла или же Холловские двигатели. Двигатель на эффекте Холла классифицируется как умеренный удельный импульс (1,600 s) космическая двигательная установка, и с 1960-х годов в ней проводились значительные теоретические и экспериментальные исследования.[1]
Холловское подруливающее устройство мощностью 6 кВт работает на НАСА Лаборатория реактивного движения
Двигатели Холла работают на различных топливах, наиболее распространенными из которых являются: ксенон и криптон. Другие представляющие интерес пропелленты включают: аргон, висмут, йод, магний и цинк.
Подруливающие устройства Холла могут ускорять свой выхлоп до скорости от 10 до 80 км / с (удельный импульс 1 000–8 000 с), при этом большинство моделей работают от 15 до 30 км / с (удельный импульс 1 500–3 000 с). Производимая тяга зависит от уровня мощности. Устройства, работающие на 1,35 кВт, создают тягу около 83 мН. Мощные модели продемонстрировали в лаборатории до 5,4 Н.[2] Уровни мощности до 100 кВт были продемонстрированы для ксеноновых двигателей Холла.
Мощные модели продемонстрировали в лаборатории до 5,4 Н.[2] Уровни мощности до 100 кВт были продемонстрированы для ксеноновых двигателей Холла.
По состоянию на 2009 годПодруливающие устройства на эффекте Холла имели входную мощность от 1,35 до 10 кВт и имели скорости истечения 10–50 км / с, с тягой 40–600 миллиньютон и КПД в диапазоне 45–60 процентов.[3]
Применение двигателей на эффекте Холла включает управление ориентацией и положением орбиты. спутники и использование в качестве главного двигателя для средних роботизированных космических аппаратов.[3]
Содержание
- 1 История
- 2 Операция
- 3 Цилиндрические подруливающие устройства Холла
- 4 Подруливающее устройство Холла с внешним разрядом
- 5 Приложения
- 6 В развитии
- 7 Рекомендации
- 8 внешняя ссылка
История
Двигатели Холла изучались независимо в США и США. Советский союз. Впервые они были публично описаны в США в начале 1960-х годов. [4][5][6] Тем не менее, двигатель Холла был впервые разработан в Советском Союзе в качестве эффективной двигательной установки. Вместо этого в США ученые сосредоточились на разработке сеточные ионные двигатели.
[4][5][6] Тем не менее, двигатель Холла был впервые разработан в Советском Союзе в качестве эффективной двигательной установки. Вместо этого в США ученые сосредоточились на разработке сеточные ионные двигатели.
В Советском Союзе были разработаны два типа двигателей Холла:
- двигатели с широкой зоной разгона, СПД (русский: СПД, стационарный плазменный двигатель; Английский: SPT, Стационарный плазменный двигатель) на Конструкторское бюро Факел
- двигатели с узкой зоной разгона, DAS (русский: ДАС, двигатель с анодным слоем; Английский: TAL, Подруливающее устройство с анодным слоем) на Центральный научно-исследовательский институт машиностроения (ЦНИИМАШ).
Советские и российские двигатели СПД
Разработкой СПД в значительной степени занимался А. И. Морозов.[7][8] Первый СПТ, работавший в космосе, СПТ-50 на борту советского Космический корабль Метеор, был запущен в декабре 1971 года. В основном они использовались для стабилизации спутников в направлениях Север-Юг и Восток-Запад. С тех пор и до конца 1990-х годов 118 двигателей SPT выполнили свою задачу и около 50 продолжали эксплуатироваться. Тяга двигателей СПТ первого поколения, СПТ-50 и СПТ-60 составляла 20 и 30 мН соответственно. В 1982 году СПТ-70 и СПТ-100 Были введены их тяги 40 и 83 мН соответственно. На постсоветском Россия мощные (несколько киловатты ) Были представлены СПТ-140, СПТ-160, СПТ-200, Т-160 и маломощный (менее 500 Вт) СПТ-35.[9]
С тех пор и до конца 1990-х годов 118 двигателей SPT выполнили свою задачу и около 50 продолжали эксплуатироваться. Тяга двигателей СПТ первого поколения, СПТ-50 и СПТ-60 составляла 20 и 30 мН соответственно. В 1982 году СПТ-70 и СПТ-100 Были введены их тяги 40 и 83 мН соответственно. На постсоветском Россия мощные (несколько киловатты ) Были представлены СПТ-140, СПТ-160, СПТ-200, Т-160 и маломощный (менее 500 Вт) СПТ-35.[9]
Советские и российские двигатели типа ТАЛ включают Д-38, Д-55, Д-80 и Д-100.[9]
Двигатели советского производства были представлены на Западе в 1992 году после того, как группа специалистов по электродвигателям из НАСА Лаборатория реактивного движения, Исследовательский центр Гленна, а Исследовательская лаборатория ВВС, при поддержке Организация противоракетной обороны, посетил российские лаборатории и провел экспериментальные испытания СПД-100 (т.е. двигателя СПД диаметром 100 мм). За последние тридцать лет на советских и российских спутниках было запущено более 200 двигателей Холла. На орбите ни разу не было сбоев. Двигатели Холла продолжают использоваться на российских космических кораблях, а также на европейских и американских космических кораблях. Космические Системы / Лорал, американский производитель коммерческих спутников, теперь запускает Fakel SPT-100 на своем космическом корабле связи GEO.
На орбите ни разу не было сбоев. Двигатели Холла продолжают использоваться на российских космических кораблях, а также на европейских и американских космических кораблях. Космические Системы / Лорал, американский производитель коммерческих спутников, теперь запускает Fakel SPT-100 на своем космическом корабле связи GEO.
С момента своего появления на западе в начале 1990-х годов двигатели Холла были предметом большого количества исследовательских работ в США, Франции, Италии, Японии и России (причем многие меньшие усилия были разбросаны по разным странам по всему миру). . Исследования двигателей Холла в США проводятся в нескольких государственных лабораториях, университетах и частных компаниях. Правительство и финансируемые правительством центры включают НАСА Лаборатория реактивного движения, НАСА Исследовательский центр Гленна, то Исследовательская лаборатория ВВС (Эдвардс AFB, Калифорния) и Аэрокосмическая корпорация. Университеты включают Технологический институт ВВС США,[10]университет Мичигана, Стэндфордский Университет, Массачусетский технологический институт, Университет Принстона, Мичиганский технологический университет, и Технологический институт Джорджии.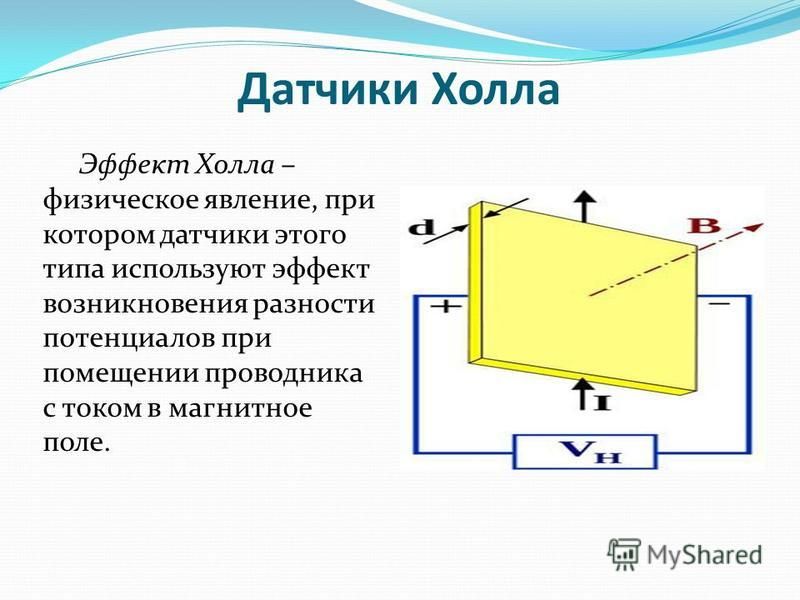 Значительный объем разработок ведется в отрасли, например: Корпорация IHI в Японии, Аэроджет и Бусек в США, SNECMA во Франции, LAJP в Украине, SITAEL в Италии и Инициатива Satrec в Южной Корее.
Значительный объем разработок ведется в отрасли, например: Корпорация IHI в Японии, Аэроджет и Бусек в США, SNECMA во Франции, LAJP в Украине, SITAEL в Италии и Инициатива Satrec в Южной Корее.
Первым применением двигателей Холла на лунной орбите была лунная миссия Европейского космического агентства (ЕКА). СМАРТ-1 в 2003 г.
Двигатели Холла были впервые продемонстрированы на западном спутнике космического корабля STEX Морской исследовательской лаборатории (NRL), на котором летал российский Д-55. Первым американским двигателем Холла, который полетел в космос, был Бусек BHT-200 на TacSat-2 демонстрация технологий космического корабля. Первым полетом американского подруливающего устройства Холла в оперативном режиме был Аэроджет БПТ-4000, запущенный в августе 2010 г. на вооружение Расширенный режим работы с очень высокими частотами Спутник связи GEO. При мощности 4,5 кВт BPT-4000 также является самым мощным двигателем Холла, когда-либо летавшим в космос. Помимо обычных задач по удержанию на месте, BPT-4000 также обеспечивает возможность подъема на орбиту космического корабля.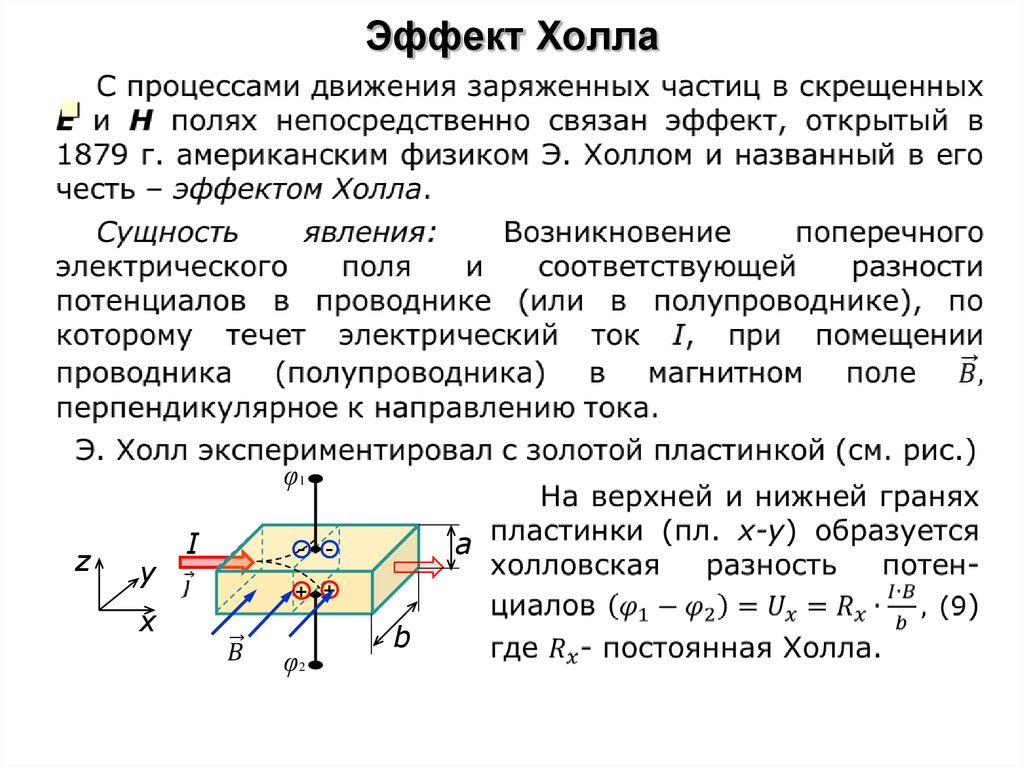 В X-37B использовался в качестве испытательного стенда для двигателя Холла для серии спутников AEHF.[11] В нескольких странах мира продолжаются попытки квалифицировать технологию подруливающих устройств Холла для коммерческого использования. В SpaceX Starlink constellation, самая большая спутниковая группировка в мире, использует двигатели Холла.
В X-37B использовался в качестве испытательного стенда для двигателя Холла для серии спутников AEHF.[11] В нескольких странах мира продолжаются попытки квалифицировать технологию подруливающих устройств Холла для коммерческого использования. В SpaceX Starlink constellation, самая большая спутниковая группировка в мире, использует двигатели Холла.
Операция
Основным принципом работы холловского подруливающего устройства является то, что в нем используется электростатический потенциал ускорять ионы до высоких скоростей. В двигателе Холла притягивающий отрицательный заряд создается электронной плазмой на открытом конце двигателя, а не сеткой. Радиальное магнитное поле порядка 100–300грамм (0.01–0.03 Т ) используется для ограничения электронов, где комбинация радиального магнитного поля и осевого электрического поля заставляет электроны дрейфовать по азимуту, образуя холловский ток, от которого устройство и получило свое название.
Подруливающее устройство Холла. Двигатели Холла в основном осесимметричны. Это поперечное сечение, содержащее эту ось.
Двигатели Холла в основном осесимметричны. Это поперечное сечение, содержащее эту ось.
Схема холловского двигателя малой тяги показана на соседнем изображении. An электрический потенциал напряжение между 150 и 800 вольт анод и катод.
Центральный шип образует один полюс электромагнит и окружен кольцевым пространством, а вокруг него находится другой полюс электромагнита с радиальным магнитным полем между ними.
Пропеллент, такой как ксенон газ подается через анод, который имеет множество маленьких отверстий, которые действуют как газораспределитель. Ксеноновое топливо используется из-за его высокой атомный вес и низкий потенциал ионизации. По мере того, как нейтральные атомы ксенона диффундируют в канал двигателя малой тяги, они ионизируются за счет столкновений с циркулирующими электронами высокой энергии (обычно 10–40 эВ, или около 10% напряжения разряда). Большинство атомов ксенона ионизируются до чистого заряда +1, но заметная часть (~ 20%) имеет чистый заряд +2.
Затем ионы ксенона ускоряются за счет электрическое поле между анодом и катодом. При разрядном напряжении 300 В ионы достигают скорости около 15 км / с (9,3 м / с) за удельный импульс 1500 секунд (15 кН · с / кг). Однако при выходе ионы увлекают за собой равное количество электронов, создавая плазма шлейф без чистой зарядки.
При разрядном напряжении 300 В ионы достигают скорости около 15 км / с (9,3 м / с) за удельный импульс 1500 секунд (15 кН · с / кг). Однако при выходе ионы увлекают за собой равное количество электронов, создавая плазма шлейф без чистой зарядки.
Радиальное магнитное поле должно быть достаточно сильным, чтобы существенно отклонять электроны с малой массой, но не ионы с большой массой, которые имеют гораздо большую гирорадиус и им почти не препятствуют. Таким образом, большая часть электронов застревает на орбите в области сильного радиального магнитного поля около выходной плоскости двигателя малой тяги, захваченных в ловушку. E×B (осевое электрическое поле и радиальное магнитное поле). Это орбитальное вращение электронов является циркулирующим. Ток Холла, и именно поэтому двигатель Холла получил свое название. Столкновения с другими частицами и стенками, а также нестабильность плазмы позволяют некоторым электронам освободиться от магнитного поля, и они дрейфуют к аноду.
Около 20–30% разрядного тока составляет электронный ток, который не создает тяги, что ограничивает энергетический КПД двигателя малой тяги; остальные 70–80% тока приходится на ионы. Поскольку большинство электронов захвачено током Холла, они имеют длительное время пребывания внутри двигателя малой тяги и способны ионизировать почти все ксеноновое топливо, что позволяет использовать 90–99% массы. Таким образом, эффективность массового использования двигателя малой тяги составляет около 90%, в то время как эффективность тока разряда составляет около 70%, при комбинированном КПД двигателя малой тяги около 63% (= 90% × 70%). Современные подруливающие устройства Холла достигли КПД 75% благодаря усовершенствованной конструкции.
По сравнению с химическими ракетами тяга очень мала, порядка 83 мН для типичного двигателя малой тяги, работающего при 300 В, 1,5 кВт. Для сравнения, вес монеты как у Квартал США или 20 центов Монета евро составляет примерно 60 мН. Как и во всех формах электрическая силовая установка космического корабля, тяга ограничена доступной мощностью, КПД и удельный импульс.
Однако двигатели Холла работают на высоких оборотах. удельные импульсы типичные для электродвигателей. Одно из особых преимуществ двигателей Холла по сравнению с сеточный ионный двигатель, заключается в том, что генерация и ускорение ионов происходит в квазинейтральной плазме, поэтому нет Заряд Чайлда-Ленгмюра (объемный заряд) насыщенный ток ограничение по плотности тяги. Это позволяет использовать двигатели гораздо меньшего размера по сравнению с ионными двигателями с сеткой.
Еще одно преимущество состоит в том, что эти двигатели могут использовать более широкий спектр топлива, подаваемого на анод, даже кислород, хотя на катоде необходимо что-то легко ионизируемое.[12]
Цилиндрические подруливающие устройства Холла
Хотя обычные (кольцевые) подруливающие устройства Холла эффективны в киловатт режима мощности, они становятся неэффективными при масштабировании до небольших размеров. Это связано с трудностями, связанными с поддержанием постоянных параметров масштабирования производительности при уменьшении размера канала и увеличении применяемого магнитное поле сила.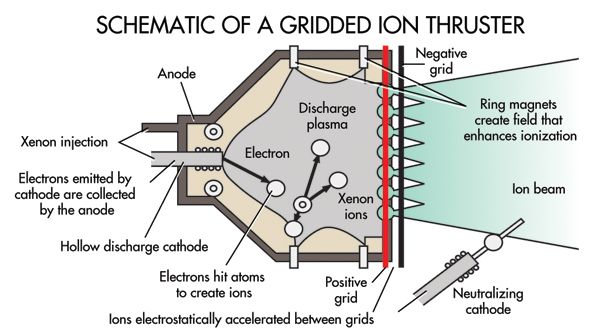 Это привело к созданию цилиндрического двигателя Холла. Цилиндрический двигатель Холла легче масштабировать до меньших размеров благодаря нетрадиционной геометрии разрядной камеры и связанным с этим магнитное поле профиль.[13][14][15] Цилиндрический двигатель Холла легче поддается миниатюризации и маломощной работе, чем обычный (кольцевой) двигатель Холла. Основная причина использования цилиндрических двигателей Холла заключается в том, что трудно получить обычный двигатель Холла, который работает в широком диапазоне от ~ 1 кВт до ~ 100 Вт, сохраняя при этом КПД 45-55%.[16]
Это привело к созданию цилиндрического двигателя Холла. Цилиндрический двигатель Холла легче масштабировать до меньших размеров благодаря нетрадиционной геометрии разрядной камеры и связанным с этим магнитное поле профиль.[13][14][15] Цилиндрический двигатель Холла легче поддается миниатюризации и маломощной работе, чем обычный (кольцевой) двигатель Холла. Основная причина использования цилиндрических двигателей Холла заключается в том, что трудно получить обычный двигатель Холла, который работает в широком диапазоне от ~ 1 кВт до ~ 100 Вт, сохраняя при этом КПД 45-55%.[16]
Подруливающее устройство Холла с внешним разрядом
Распылительная эрозия стенок разрядного канала и полюсных наконечников, защищающих магнитную цепь, вызывает сбои в работе двигателя. Следовательно, кольцевые и цилиндрические двигатели Холла имеют ограниченный срок службы. Хотя было показано, что магнитное экранирование значительно снижает эрозию стенки разрядного канала, эрозия полюсного наконечника все еще вызывает беспокойство. [17] В качестве альтернативы была представлена нетрадиционная конструкция холловского двигателя, называемого холловским двигателем с внешним разрядом или плазменным двигателем с внешним разрядом (XPT).[18][19][20] Двигатель Холла с внешним разрядом не имеет стенок разрядного канала или полюсных наконечников. Плазменный разряд создается и поддерживается полностью в открытом пространстве за пределами конструкции двигателя, что обеспечивает работу без эрозии.
[17] В качестве альтернативы была представлена нетрадиционная конструкция холловского двигателя, называемого холловским двигателем с внешним разрядом или плазменным двигателем с внешним разрядом (XPT).[18][19][20] Двигатель Холла с внешним разрядом не имеет стенок разрядного канала или полюсных наконечников. Плазменный разряд создается и поддерживается полностью в открытом пространстве за пределами конструкции двигателя, что обеспечивает работу без эрозии.
Приложения
Двигатели Холла летают в космос с декабря 1971 года, когда Советский Союз запустил СПТ-50 на спутнике «Метеор».[21] С тех пор в космосе было запущено более 240 двигателей со 100% -ным успехом.[22] Двигатели Холла в настоящее время обычно используются на коммерческих спутниках связи LEO и GEO, где они используются для вывода на орбиту и канцелярские товары.
Первый[неудачная проверка ] Подруливающим устройством Холла для полета на западном спутнике был российский Д-55, построенный ЦНИИМАШ на базе NRO.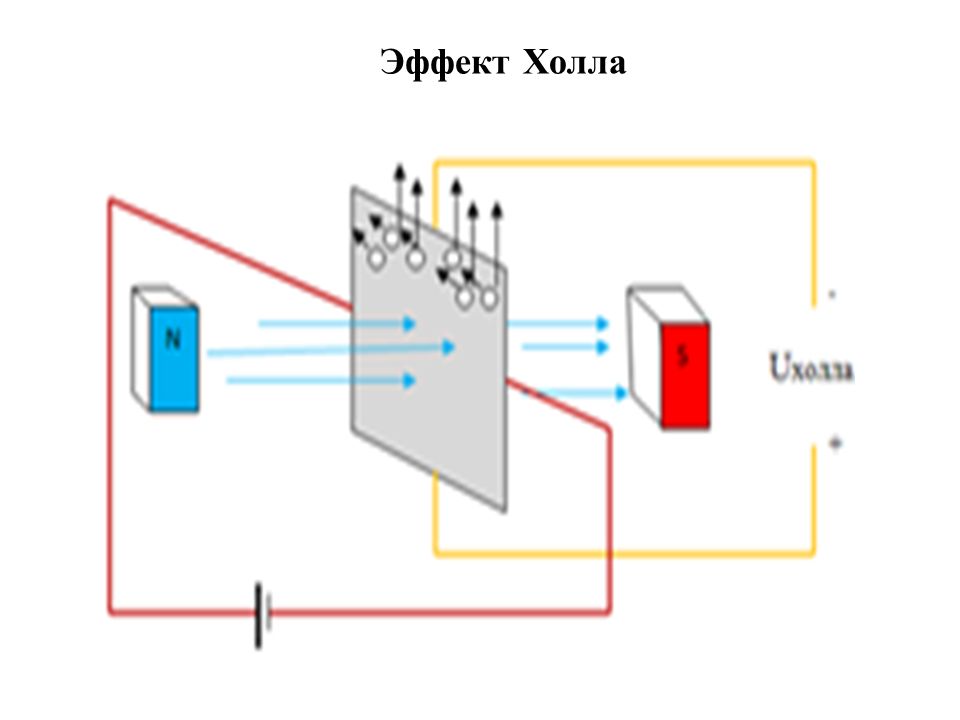 STEX космический корабль, запущенный 3 октября 1998 г.[23]
STEX космический корабль, запущенный 3 октября 1998 г.[23]
В солнечная электрическая тяга система Европейское космическое агентство с СМАРТ-1 космический корабль использовал Snecma ППС-1350 -G Холла.[24] SMART-1 была миссией по демонстрации технологий, которая вращалась вокруг Луна. Это использование PPS-1350-G, начавшееся 28 сентября 2003 г., было первым использованием подруливающего устройства Холла вне геосинхронная околоземная орбита (ГЕО). Подобно большинству силовых установок Холловского двигателя, используемых в коммерческих приложениях, двигатель Холла на SMART-1 можно было регулировать в диапазоне мощности, удельного импульса и тяги.[25] Имеет диапазон разрядной мощности 0,46–1,19 кВт. удельный импульс 1,100–1600 с и тягой 30–70 мН.
Многие малые спутники SpaceX Starlink кластерное использование двигателей Холла для удержания позиции и спуска с орбиты.[26]
В развитии
Самый большой планируемый двигатель на эффекте Холла — 40 кВт НАСА. Обзор разработки и применения усовершенствованной электрической двигательной установки (AEPS). (PDF). Дэниел А. Херман, Тодд А. Тофил, Уолтер Сантьяго, Хани Камхави, Джеймс Э. Полк, Джон С. Снайдер, Ричард Р. Хофер, Фрэнк К. Пича, Джерри Джексон и Мэй Аллен. НАСА; NASA / TM — 2018-219761. 35-я Международная конференция по электродвигателям. Атланта, Джорджия, 8–12 октября 2017 г. Дата обращения: 27 июля 2018 г.
Обзор разработки и применения усовершенствованной электрической двигательной установки (AEPS). (PDF). Дэниел А. Херман, Тодд А. Тофил, Уолтер Сантьяго, Хани Камхави, Джеймс Э. Полк, Джон С. Снайдер, Ричард Р. Хофер, Фрэнк К. Пича, Джерри Джексон и Мэй Аллен. НАСА; NASA / TM — 2018-219761. 35-я Международная конференция по электродвигателям. Атланта, Джорджия, 8–12 октября 2017 г. Дата обращения: 27 июля 2018 г.
внешняя ссылка
- Эдгар Ю. (2009). Новая заря электрической ракеты. Двигатель Холла
- SITAEL S.p.A. (Италия) — страница, на которой представлена продукция и спецификации подруливающих устройств на эффекте Холла.
- Страница Snecma SA (Франция) о подруливающем устройстве PPS-1350 Hall
- Подсистемы электродвигателя (PDF)
- Стационарные плазменные двигатели (PDF)
- Страница ESA о подруливающих устройствах Холла
Датчик Холла: устройство и принцип работы
Когда американский физик Эдвин Холл открывал свой эффект взаимодействия электрического тока с магнитным полем, у него и в мыслях не было, что чаще всего его фамилия станет употребляться на автомобильных рынках в России. Удивительно, но факт — самые разные люди, весьма далёкие от физики, понятия не имеющие кто такой Холл, знают, что такое датчик Холла в автомобиле, и даже одно время страдали от их дефицита.
Удивительно, но факт — самые разные люди, весьма далёкие от физики, понятия не имеющие кто такой Холл, знают, что такое датчик Холла в автомобиле, и даже одно время страдали от их дефицита.
Содержание
В чём проявляется эффект Холла, и как это можно использовать в технике
Магнитное поле широко используется в автомобильной технике, несмотря на свою невидимость и неосязаемость. Даже свет, состоящий из электрических и магнитных полей, воспринимается благодаря своей электрической составляющей. Тем не менее, с помощью специальных магниточувствительных датчиков поле можно зафиксировать и даже измерить.
В основу одного из таких датчиков лёг эффект Холла, заключающийся в появлении поперечной разницы потенциалов на кристалле полупроводника, вдоль которого течёт ток. Образуется она только при помещении кристалла в магнитное поле, всё прочее пластину легированного кремния не поляризует. Это напряжение и подлежит фиксации, означая, что датчик попал в зону действия магнитного поля.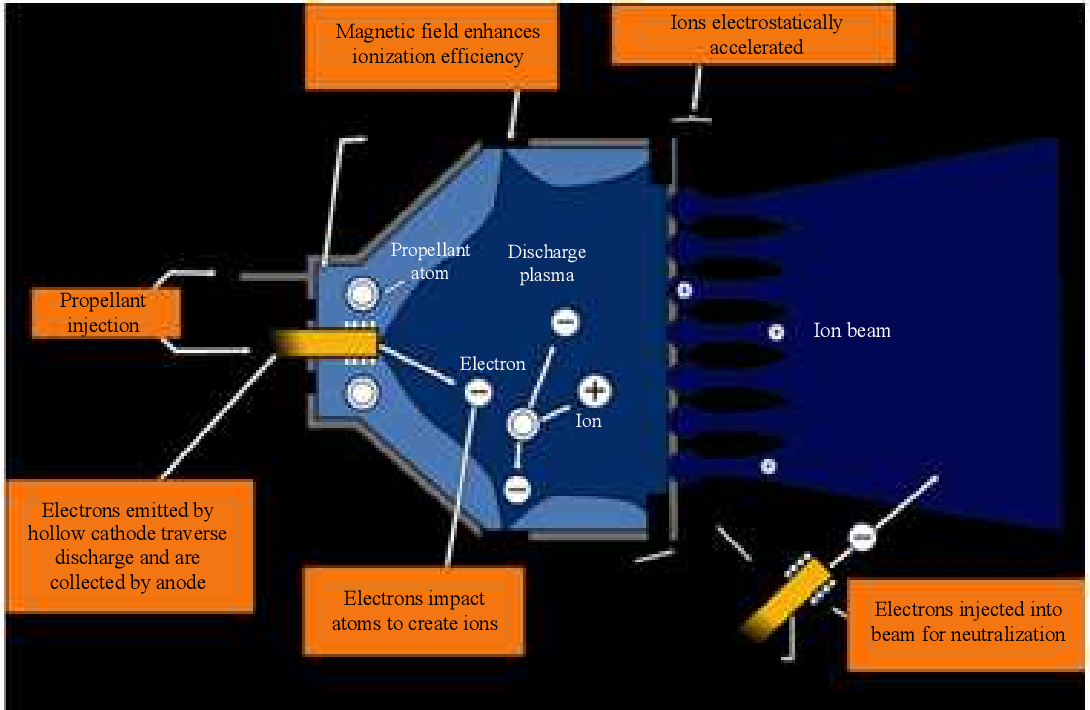
Собственно, всего этого недостаточно для использования кристалла в качестве датчика. Магнитное поле присутствует везде, надо определить его превышение над естественным фоном и помехами. Для этого к пластине подключается усилитель слабого сигнала и регулируемый пороговый элемент (компаратор). Вся схема выдаёт на выходе логический «0» по электрическому уровню, если поле есть, и логическую единицу во всех прочих случаях. Такая негативная логика обычно принята в цифровой технике. А чтобы в момент смены сигнала не наблюдалась «болтанка» выхода из-за неопределённости, устройство снабжается триггером Шмитта. Это такая схема, которая обеспечивает амплитудное запаздывание срабатывания (гистерезис), защищая от цифрового дребезга и помех в момент переключения, гарантируя одиночный крутой фронт сигнала и однозначность привязки во времени.
Устройство и принцип действия датчика
Если бы всё перечисленное выполнялось на дискретных элементах, то датчик был бы размером с магнитолу, столько же стоил, работал ненадёжно и потреблял много электроэнергии.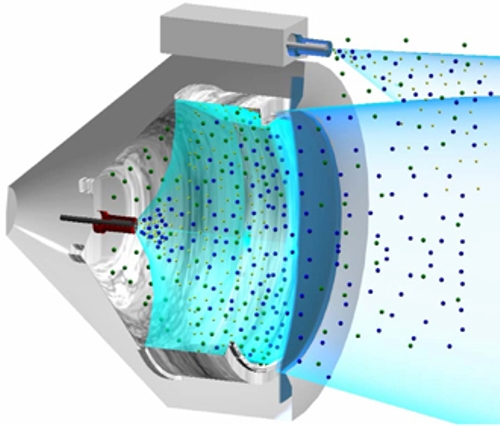 В реальности всё устройство датчика Холла выполняется методами интегральной микроэлектроники всё на том же полупроводниковом кристалле, который с лёгкой руки деятелей из Кремниевой долины давно уже принято называть чипом.
В реальности всё устройство датчика Холла выполняется методами интегральной микроэлектроники всё на том же полупроводниковом кристалле, который с лёгкой руки деятелей из Кремниевой долины давно уже принято называть чипом.
Сам датчик миниатюрен настолько, что его размерами можно пренебречь на фоне габаритов корпуса, электрического разъёма, подводящих проводов и вспомогательного постоянного магнита. Кристалл полностью заливается пластмассой для защиты от внешних воздействий, снаружи остаётся только разъём и полюс магнита. В зависимости от назначения, датчик может иметь прорезь, внутри которой будет проходить край задающего синхронизацию реперного диска с пазами.
Принцип работы датчика Холла в автомобилях состоит в том, что при появлении в рабочей зоне изменений магнитного поля, например, прорези реперного диска вместо его цельной части, или ступеньки на шкиве, или метки на фланце распредвала, сигнал на выходе сменит своё значение с нуля на единицу или наоборот. Таким образом, электронный блок, считывающий показания датчика, узнает о наступлении определённого момента во вращении вала, например, верхней мёртвой точки поршня определённого цилиндра или любого его положения относительно этой ВМТ, нужная информация задаётся разработчиками двигателя. Это ложится в основу расчёта блоком управления двигателя таких важных данных, как момент зажигания, периодичность впрыска топлива, порядок открытия форсунок.
Это ложится в основу расчёта блоком управления двигателя таких важных данных, как момент зажигания, периодичность впрыска топлива, порядок открытия форсунок.
Читайте также: Вариатор в машине — принцип работы, плюсы и минусы
Разные случаи применения датчиков на эффекте Холла
Впервые такой датчик был использован на автомобилях с карбюраторными двигателями для замены контактов системы зажигания. Потом появились и другие применения магниточувствительных сенсоров.
Датчик Холла в системе зажигания карбюраторного двигателя
Классическая батарейная система зажигания действует по принципу накопления энергии в магнитном поле катушки зажигания за счёт протекания тока по её первичной обмотке с последующим резким разрыванием цепи, что вызывает рост напряжения на вторичной обмотке и искровой разряд в свече. Контакты прерывателя при этом работают в крайне тяжёлых условиях, обгорают, изнашиваются и долго не живут. К тому же их возможности ограничивают рост мощности системы, а значит и работу двигателя с дальнейшим обеднением смеси для экономии горючего.
К тому же их возможности ограничивают рост мощности системы, а значит и работу двигателя с дальнейшим обеднением смеси для экономии горючего.
Проблему частично решило появление электронной бесконтактной системы зажигания с прерывателем на основе датчика Холла (ДХ). Здесь уже нет обгорающих и требующих регулировки зазора контактов, имеется лишь реперный диск, вращающийся в прорези датчика. Пока мимо магнита ДХ проходит цельная стенка диска, коммутатор зажигания, представляющий собой простой усилитель тока, управляемый сигналом ДХ, отдыхает, то есть ждёт момента начала накопления энергии. По переднему фронту прорези выходной ключ коммутатора открывается, начинается накопление энергии в катушке.
Ток увеличивается не до бесконечности. Выйдя на расчётную номинальную величину порядка полутора десятков ампер, он стабилизируется, а в момент появления второго края прорези датчик срабатывает, ключ размыкается, начинается рост напряжения на обмотках катушки вплоть до пробоя искрового зазора.
Датчик Холла здесь полностью оправдывает свои способности, он очень точно и стабильно задаёт моменты срабатывания всех элементов системы, а значит и ровную работу двигателя без пропусков зажигания и детонации. Сам ДХ при этом не изнашивается, служит теоретически вечно, избавляя водителей и ремонтников от всех неприятностей классического контактного прерывателя-распределителя (трамблёра). И только бракованные детали, а также мнительность заставляли людей покупать датчики для проверки и впрок, создавая дефицит, о котором было упомянуто ранее.
В качестве датчика положение коленчатого вала (ДПКВ)
Чаще всего здесь используется простейший и надёжный индуктивный ДПКВ. Это обычная катушка с тонким проводом, намотанная на постоянный магнит. Мимо неё проходит зубчатый венец шкива коленвала, на котором один зубец отсутствует. Выходной сигнал представляет собой последовательность импульсов переменного тока, один из которых имеет увеличенную длительность и амплитуду. Компьютеру электронного блока управления двигателем (ЭБУ) не составит труда, располагая такой временной диаграммой, привязать все процессы во времени к фазам положения коленвала.
Компьютеру электронного блока управления двигателем (ЭБУ) не составит труда, располагая такой временной диаграммой, привязать все процессы во времени к фазам положения коленвала.
Однако некоторых разработчиков подобная простота не устраивала, возможно, им хотелось большей точности, поэтому в качестве датчика они использовали всё тот же ДХ. Принцип работы здесь такой же, зубцы задающего шкива замыкают и размыкают магнитный поток через датчик, изменяя его выходной цифровой сигнал. Получается последовательность импульсов, по форме несколько другая, но несущая в точности ту же самую информацию и выполняющая те же цели. Это основной и самый главный датчик двигателя, единственный, без которого мотор даже не заведётся, поэтому датчик Холла это то, что здесь нужно, повышенная надёжность тут очень кстати.
Выдача сигналов о положении распределительного вала
Очень хорошо датчику Холла подходит ещё одна работа, для которой он часто используется.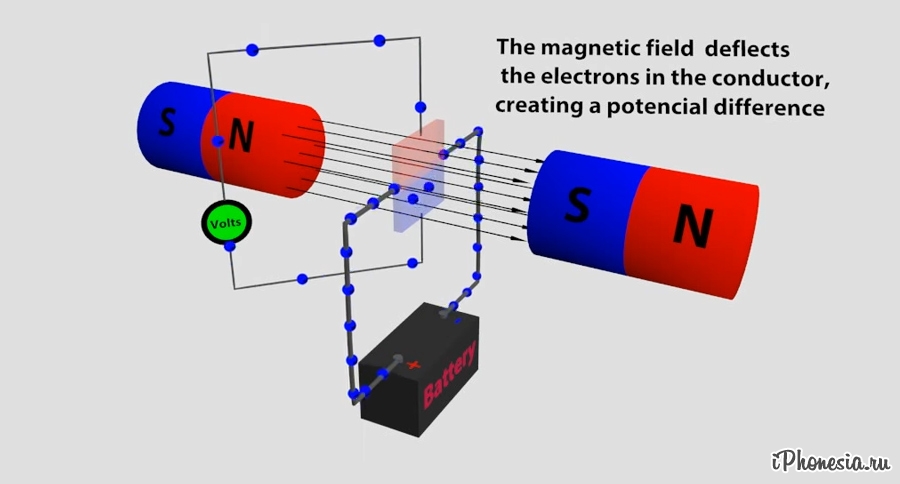 Это синхронизация фазированного многоточечного впрыска топлива.
Это синхронизация фазированного многоточечного впрыска топлива.
Вообще, системы впрыска могут быть самыми различными:
- одноточечные, или моновпрыск, не сильно отличается от карбюратора, имеется один центральный модуль, где форсунка распыляет бензин во впускной коллектор, откуда он равномерно, или не очень, всасывается цилиндрами;
- многоточечный, здесь на каждый цилиндр приходится своя форсунка, срабатывающая после окончания такта выпуска, чтобы подготовить смесь к впуску;
- многоточечный фазированный, для его реализации как раз и потребуется датчик Холла.
Недостатком обычного впрыска является отсутствие его точной синхронизации с моментом начала впуска в конкретный цилиндр. Дело в том, что информация для ЭБУ приходит с датчика коленвала, а по его положению невозможно точно засечь конкретный такт в цилиндре, ведь полный цикл требует двух оборотов вала, которые с точки зрения ДПКВ абсолютно одинаковые и ничем не различаются. Поэтому впрыск будет происходить два раза за цикл, причём один раз совершенно бесполезно, на закрытый перед рабочим ходом впускной клапан.
Для совершенствования системы был применён датчик положения распредвала, разумеется, на эффекте Холла. Конструкция уже известна, дисковый репер и магнитный ДХ с выходом на ЭБУ. Теперь блок управления точно знает, как отличить ВМТ сжатия от ВМТ выпуска и каждая форсунка откроется строго в нужный момент. У бензина не будет времени, чтобы бесполезно оседать на стенках коллектора.
Читайте также: Что такое коробка передач DSG
Как проверяют ДХ при возникновении подозрений
Устройство это очень надёжное, но абсолютной защиты от неисправности не существует. Поэтому иногда приходится проверять и эти датчики.
- Самое простое — подменить ДХ на заведомо исправный. Это избавит от возни со щупами, пробниками и осциллографами. А стоит датчик недорого, его всегда полезно иметь в запасе если не для замены, то именно для проверки забарахлившей системы впрыска или зажигания.
- Люди, знающие принцип действия датчика Холла, могут проверить его простейшими и не очень приборами. Например, щупом-пробником со светодиодом. Выход датчика представляет собой каскад с открытым коллектором. Это означает, что в положении физического нуля транзистор открыт, и если пробник включён между плюсом питания и выходом ДХ, то индикатор засветится. Перемещая репер перед полюсами датчика, можно заставить его мигать, что почти точно укажет на исправность ДХ и подсоединённых цепей проводки.
- Слово «почти» было употреблено в том смысле, что точно убедиться в исправности можно лишь с помощью цифрового запоминающего осциллографа, который имеется у многих диагностов как приставка к ноутбуку. С его применением можно проверить параметр, который недоступен щупам — быстродействие датчика. Фронты напряжения должны быть достаточно крутыми, что осциллограф и покажет. «Заваленный» фронт может оказаться тем самым случаем, когда датчик вроде работает, и пробник или мультиметр это подтверждают, а система сбоит и светит ошибки.
 Например, щупом-пробником со светодиодом. Выход датчика представляет собой каскад с открытым коллектором. Это означает, что в положении физического нуля транзистор открыт, и если пробник включён между плюсом питания и выходом ДХ, то индикатор засветится. Перемещая репер перед полюсами датчика, можно заставить его мигать, что почти точно укажет на исправность ДХ и подсоединённых цепей проводки.
Например, щупом-пробником со светодиодом. Выход датчика представляет собой каскад с открытым коллектором. Это означает, что в положении физического нуля транзистор открыт, и если пробник включён между плюсом питания и выходом ДХ, то индикатор засветится. Перемещая репер перед полюсами датчика, можно заставить его мигать, что почти точно укажет на исправность ДХ и подсоединённых цепей проводки.Почти все случаи, поясняющие, что такое датчик Холла в автомобиле, рассмотрены, остаётся упомянуть вполне возможное менее явное присутствие этих небольших приборов в автоэлектронике. Многие машины оснащаются достаточно мощными электродвигателями, где также для работы силовой электроники используются датчики Холла, следящие за положением ротора в магнитном поле. И даже этим, возможно, проникновение ДХ в авто не заканчивается. Компактный, надёжный и точный прибор всегда найдёт себе область работы во всё больше обрастающем электроникой современном автомобиле.
Многие машины оснащаются достаточно мощными электродвигателями, где также для работы силовой электроники используются датчики Холла, следящие за положением ротора в магнитном поле. И даже этим, возможно, проникновение ДХ в авто не заканчивается. Компактный, надёжный и точный прибор всегда найдёт себе область работы во всё больше обрастающем электроникой современном автомобиле.
Вам также будет интересно почитать:
Украинская компания получила патент США на особую технологию космических двигателей — Центр транспортних стратегій
Новини
2634 перегляди
Facebook0
Twitter
Патент делает SETS единственной компанией в мире, способной производить высокостабильные силовые установки.
Украинская компания Space Electric Thruster Systems (SETS, Днепр, входит в космическую вертикаль Noosphere Макса Полякова), производитель маломощных космических плазменных двигателей и электрических силовых установок, получила патент США на применение стабилизированного источника мощности разряда для питания Холловских двигателей.
Об этом пишет ЦТС со ссылкой на Интерфакс-Украина.
Как отмечается в сообщении компании, патент США делает SETS единственной компанией в мире, способной производить высокостабильные силовые установки.
Они продлевают срок эксплуатации спутников, а также помогают уменьшить количество космического мусора.
«SETS инициировала исследования по стабилизации двигателя на эффекте Холла с целью разработки усовершенствованного технологического решения для космического рынка. Эта технология обеспечит стабильную работу спутниковых двигателей, что в целом положительно скажется на сроке службы спутников. Эта технология уникальна на космическом рынке», — отметил генеральный директор SETS Виктор Сербин.
В компании также добавили, что команда инженеров SETS искала решение для повышения стабильности двигателей Холла, поскольку традиционный метод стабилизации разряда напряжения двигателя слишком сложен, чтобы быть эффективным, и часто вызывает сбои в работе системы.
Использование такого источника питания повышает стабильность работы двигателей Холла, а также позволяет более точно регулировать параметры работы силовой установки при длительной эксплуатации.
Первые двигатели SETS выйдут на орбиту во время дебютного полета ракеты Firefly Alpha. Он который запланировал на лето 2021 года для проведения испытаний в космосе.
Напомним, ранее ЦТС писал, что SETS как компания-разработчик ракетно-космической техники Firefly Aerospace, получила приглашение от NASA в рамках программы SBIR на разработку космического аппарата на электрической тяге, способного в космосе перемещать грузы и доставлять их на лунную орбиту — Space Utility Vehicle. Этот новый «космический тягач» сможет доставить полезную нагрузку на орбиты, которую сложно достичь при помощи классических ракет.
Facebook0
Twitter
Теги:
США, космос, инновации
Матеріали на тему
Зонд NASA вперше в історії успішно влучив в астероїд (фото)
Американські вагони хочуть задіяти для перевезень українського зерна
Американські залізничники змогли домовитися з Білим домом і поки що не зупинятимуть дальні потяги
Космічний супутник, придбаний на пожертви українців, за перші дні роботи виявив 60 одиниць бойової техніки ворога
В Дубліні відкрили «велосипедну бібліотеку» в одній із початкових шкіл
Популярні статті
Порти
Адріатика кличе: Чи піде українське зерно через порти Хорватії і Чорногорії
24 лютого — 24 серпня 2022: шість місяців війни для інфраструктури і транспорту України
Польський погляд на проблеми української логістики під час війни
Накормить мир: Как наладить экспортную логистику зерна из Украины
Залізниця
В обхід росії і білорусі: Як намагаються збільшити транзит по Транскаспійському маршруту
З плану для Лугано: Скільки мільярдів просять на відновлення транспортної інфраструктури України
Как прорвать российскую блокаду черноморских портов Украины — мнение адмирала ВМС США
Война и РЖД: Проблемы только начинаются
Авіа
Авіація в Європі після пандемії: Черги, скасування рейсів та нестача персоналу
Тарифний бліцкриг «Укрзалізниці»: Які наслідки матиме підвищення тарифів на залізничні перевезення
Помощь идет: Кто и как доставляет гуманитарные грузы в Украину
Пока бензин в дефиците: Как работает альтернативный транспорт в Киеве
Передрук матеріалів тільки за наявності гіперпосилання на cfts. org.ua.
Передрук, копіювання, відтворення або інше використання матеріалів, які містять посилання на агентство «Iнтерфакс-Україна», суворо заборонено.
Датчик Холла и его роль в контроллере двигателя
Датчик Холла — это широко используемый датчик, обеспечивающий обратную связь о положении ротора с контроллером двигателя. Давайте разберемся со значением этого датчика в системе управления автомобильным двигателем.
A Система управления двигателем BLDC представляет собой сложную схему, в которой несколько компонентов работают в тандеме, чтобы заставить двигатель двигаться желаемым образом. Эффективность, долговечность и производительность — это атрибуты, которые больше всего беспокоят инженеров при разработке такой системы.
В то время как магниты и катушки заботятся об электрическом аспекте, микроконтроллер действует как мозг, приводящий в движение двигатель. Но даже самый острый мозг нуждается в сенсорной информации.
Здесь большое значение имеют два сенсорных входа: Скорость и Положение . Давайте разберемся с ними в контексте коммутации двигателя.
Коммутация — это процесс переключения тока в фазах двигателя для облегчения вращения двигателя.
В коллекторных двигателях щетки контактируют с коллектором и переключают ток для движения двигателей. Двигатели BLDC не имеют щеток; таким образом, они должны приводиться в движение электронным способом с помощью системы управления двигателем.
Контроллер двигателя BLDC подает прямоугольные сигналы (напряжение) на магниты ротора и создает магнитное поле, которое приводит в движение двигатель.
Значение скорости и положения ротора при коммутации двигателя:
Коммутация в BLDC двигателе представляет собой 6-шаговый процесс . Трехфазный Н-мост используется для создания 6 векторов потока , каждый из которых вызывает поворот двигателя на 60 градусов (соответствует следующему положению), таким образом совершая полный оборот на 360 градусов.
- Чтобы двигатель двигался, контроллер двигателя подает ток через катушку статора. Это создает магнитное поле, которое, в свою очередь, создает крутящий момент на роторе (постоянный магнит). В результате ротор начинает двигаться.
- Теперь, если ротор приблизится к движущему его магнитному полю, ротор будет стремиться остановиться из-за изменения полярности. В этот момент магнитное поле начнет притягивать ротор и остановит движение. Чтобы этого избежать, система управления двигателем переключает ток, подаваемый на статор, и создается новое магнитное поле, а ротор продолжает свое движение. Таким образом, процесс коммутации сводится к переключению тока в правильном экземпляре .
- Понятие скорости и положения появляется на картинке, поскольку этот «правильный экземпляр» должен ощущаться, когда он прибывает.
- Датчик необходим для обратной связи с системой управления двигателем, указывающей, когда ротор достиг нужного положения. Если коммутация выполняется быстрее или медленнее, чем скорость ротора, магниты выходят из синхронизации с магнитным полем статора. Это заставляет ротор вибрировать и останавливаться вместо того, чтобы вращаться.
- После одной коммутации необходимо определить положение ротора относительно статора, чтобы можно было инициировать следующую коммутацию. И, следовательно, определение положения также является важным параметром.
Существует много типов датчиков, используемых в производстве электродвигателей, таких как энкодеры, переключатели и потенциометры. Однако наиболее широко используемым и развернутым датчиком является датчик Холла .
В следующих разделах мы подробно поговорим о датчике Холла и его роли в системе управления двигателем.
Что такое датчик Холла?
Датчик на эффекте Холла представляет собой преобразователь, основанный на принципе эффекта Холла.
Эффект получения измеряемого напряжения, когда проводник или полупроводник с током, текущим в одном направлении, вводится перпендикулярно магнитному полю, называется эффектом Холла.
Проще говоря, напряжение возникает на электрическом проводнике, когда к нему прикладывается магнитное поле в направлении, перпендикулярном протеканию тока.
Датчик на эффекте Холла представляет собой полупроводниковое устройство, использующее этот принцип для определения положения, скорости и различных других характеристик, необходимых для эффективной работы двигателя BLDC.
Увеличенный вид датчика Холла
Через полосу Холла постоянно протекает небольшой ток. Как уже упоминалось, переменное поле от этого магнита ротора будет создавать напряжение на полосе Холла. Затем напряжение подается на цифровую схему (показана на диаграмме выше), которая, в свою очередь, выдает цифровой сигнал в виде выходного сигнала датчика Холла.
Как работает датчик Холла в двигателе с бесконтактным двигателем постоянного тока
Как правило, двигатель с бесконтактным двигателем имеет три датчика Холла, установленных на роторе или статоре. Эти датчики Холла расположены на расстоянии 120 градусов друг от друга, обеспечивая угловое положение от 0 до 360 градусов.
Когда эти датчики Холла вступают в контакт с магнитным полем ротора, они генерируют соответствующие цифровые импульсы с единицами и 0, как показано на диаграмме ниже.
За шесть шагов эти датчики Холла могут определить положение двигателя (угол). На диаграмме прямоугольные формы сигналов демонстрируют положительный и отрицательный импульсы, генерируемые под соответствующим углом всеми тремя датчиками Холла — A, B и C.
достигла 360 градусов.
Следующее объяснение внесет больше ясности.
Когда магнит ротора пересекает один из датчиков, он генерирует низкий или высокий сигнал в зависимости от того, прошел ли он северный или южный полюс ротора. Когда ротор пересекает все три датчика, эти датчики переключаются между низким и высоким уровнем, таким образом выдавая положение ротора каждые 60 градусов.
На приведенной ниже схеме показан типичный контроллер двигателя BLDC. Три линии, идущие от двигателя к контроллеру, изображают сигнал, посылаемый тремя датчиками Холла.
Датчик Холла способен различать положительный и отрицательный заряды, движущиеся в противоположном направлении. Магнитное поле, обнаруженное датчиком Холла, преобразуется в подходящий аналоговый или цифровой сигнал, который может считываться электронной системой, обычно системой управления двигателем.
Ниже показана таблица истинности, полученная на основе показаний трех датчиков Холла. Как видите, состояние транзистора H-моста зависит от сигнала, обнаруженного датчиком. Стрелка вниз показывает движение по часовой стрелке (CW), а стрелка вверх показывает движение против часовой стрелки (CCW).
Теперь, когда у нас есть таблица истинности и график, можно легко рассчитать угол (положение) и скорость ротора.
Преимущества использования датчика Холла в контроллере двигателя постоянного тока BLDC
- Датчик Холла представляет собой очень простое устройство, состоящее из магнитов, поэтому оно очень экономично для систем управления двигателем.
- По той же причине эти датчики легко внедрить в передовые системы управления двигателем для электромобилей и другие автомобильные решения.
- Большинство двигателей BLDC оснащены этими датчиками.
- в основном невосприимчивы к условиям окружающей среды, таким как влажность, температура, пыль и вибрация.
Датчики Холла
Завершение
Многое происходит внутри системы управления двигателем BLDC. Есть алгоритм FOC, схемы H-Bridge, эффективная коммутация и многое другое. Среди множества компонентов внутри системы управления двигателем BLDC очень маленький и скромный датчик — датчик Холла — дает о себе знать.
Будучи экономичными и простыми в применении, эти датчики сделали современные решения управления двигателями постоянного тока более эффективными и удобными в использовании в автомобильной промышленности.
Посмотрите это место, чтобы узнать о других подобных компонентах, которые играют жизненно важную роль в контроллере двигателя BLDC.
Как датчики Холла влияют на энергию ударного двигателя Использование
Биполярные датчики Холла используются в двигателях BLDC для определения положения вращающегося магнита. В этом примере восьмиполюсный двигатель с трехфазной обмоткой использует три биполярных фиксирующих датчика Холла.
Уже много лет широко известно, что промышленность является крупнейшим потребителем энергии в мире и что большая часть этого энергопотребления приходится на двигатели, используемые в промышленности. Согласно отчету ABB, на долю промышленности приходится 42 процента мирового потребления энергии, при этом электродвигатели используют 2/3 этой энергии.
Чтобы решить эту проблему, большое внимание было уделено одному из наиболее распространенных двигателей, используемых в промышленности, — бесщеточному двигателю постоянного тока (BLDC). Общепризнанным методом повышения эффективности двигателей BLDC является включение датчиков Холла.
Правильный выбор биполярной фиксации Интегральная схема датчика Холла для электронной коммутации в двигателях BLDC играет большую роль в эффективности этих двигателей и, следовательно, может значительно повлиять на надежность и производительность многих приложений, включая робототехнику, портативное медицинское оборудование и вентиляторы HVAC.
Компания Honeywell Sensing and Control выпустила информационный документ «Как выбрать датчики Холла для бесколлекторных двигателей постоянного тока», чтобы помочь разработчикам двигателей и пользователям лучше понять влияние датчиков Холла на бесщеточные двигатели постоянного тока.
Поскольку в двигателях BLDC используется электронная, а не механическая коммутация для управления распределением мощности на двигатель, в технической документации указывается, что датчики Холла с фиксацией, установленные в двигателе, используются для измерения положения двигателя, которое передается на электронный контроллер для вращения двигателя в нужное время и в нужном направлении.
Основные конструктивные характеристики, которые следует учитывать при биполярном датчике Холла с фиксацией, используемом для коммутации двигателя BLDC, включают чувствительность, повторяемость, стабильность при перегреве и время отклика.
Поскольку для активации датчика Холла требуется магнитное поле, « уровень чувствительности зависит от расположения датчика к магниту, воздушного зазора и силы магнита. В технических характеристиках изделия должна быть указана напряженность магнитного поля (измеряемая в Гауссах), необходимая для того, чтобы биполярный датчик Холла изменил состояние (сработал и разблокировался)», — отмечается в официальном документе Honeywell. «Датчик с высокой чувствительностью, обычно рассчитанный на менее 60 Гаусс, позволяет использовать магниты меньшего размера или менее дорогие магнитные материалы, что становится все более важным, поскольку цены на редкоземельные магниты продолжают расти. Высокая чувствительность также позволяет использовать более широкий воздушный зазор, что означает, что датчик можно разместить дальше от магнита, и он по-прежнему будет очень надежным, обеспечивая при этом некоторую гибкость конструкции».
Повторяемость относится ко времени фиксации датчика Холла. «Это идет рука об руку с высокой чувствительностью, поскольку позволяет датчику быть более воспроизводимым», — говорится в документе. «Когда выход датчика включается, он направляет ток по обмоткам катушки в неподвижной части двигателя. Этот ток создает магнитное поле, которое взаимодействует с полем постоянных магнитов на валу и заставляет вал вращаться. Когда магнит вращается вокруг датчика, датчик с высокой повторяемостью меняет свое состояние в одном и том же угловом положении каждый раз, когда магнит проходит мимо. Датчик с высокой воспроизводимостью — это датчик с постоянным временем отклика, который будет поддерживать все угловые измерения очень близкими к одному и тому же значению».
Подобно повторяемости, стабильность , согласно техническому документу Honeywell, относится к тому, насколько угловое положение изменяется в зависимости от температуры или напряжения. Например, если выходной сигнал датчика меняет состояние на пять градусов при 25 °C, где он меняет состояние при 125 °C? Уровень Гаусса, необходимый для включения детали при 125 °C, должен быть как можно ближе к уровню Гаусса, необходимому для включения детали при 25 °C. Итак, если деталь работает при 30 Гаусс при 25 °C, работает ли она при 30 Гаусс при 125 °C или рабочая точка смещается, например, до 50 Гаусс или 5 Гаусс? Это важно, поскольку для точного определения положения требуется стабильность при перегреве в сочетании с высокой чувствительностью. Магнитная стабильность также помогает улучшить характеристики джиттера для эффективности BLDC и приводит к меньшему изменению скорости.
Время отклика — это время, необходимое выходному сигналу датчика для изменения состояния. Например, если датчик имеет рабочую точку 30 Гаусс и к датчику приложено магнитное поле с уровнем 30 Гаусс, время отклика измеряется от точки, когда поле 30 Гаусс приложено, до момента изменения состояния выхода. Более быстрое время отклика на изменение магнитного поля обеспечивает большую эффективность коммутации BLDC. Если датчик переключается при другом уровне магнитного поля, чем требуется, из-за медленного отклика или задержки, это может привести к ошибкам точности.
Просмотрите полный информационный документ Honeywell «Как выбрать датчики Холла для бесщеточных двигателей постоянного тока».
Honeywell Intelligated
Как работают датчики Холла
Как работают датчики Холла — Объясните это
Вы здесь:
Домашняя страница >
Инструменты, инструменты и измерения >
Датчики Холла
- Дом
- Индекс А-Я
- Случайная статья
- Хронология
- Учебное пособие
- О нас
- Конфиденциальность и файлы cookie
Реклама
Измерить электричество очень просто — мы
все знакомы с электрическими единицами, такими как вольты, амперы и ватты (и большинство из нас видели
счетчики с подвижной катушкой
в той или иной форме). Измерение магнетизма немного сложнее. Спросите большинство
люди, как измерить силу магнитного поля (невидимого
область магнетизма, простирающаяся вокруг магнита) или единицы в
какая напряженность поля измеряется (веберы или тесла, в зависимости от того, как
вы измеряете), и они не будут иметь ни малейшего понятия.
Но есть простой способ измерить магнетизм с помощью прибора
называется датчиком или зондом на эффекте Холла, который использует хитрую часть
наука открыта в 1879 году американским физиком
Эдвин Х. Холл
(1855–1938). Работа Холла была гениальной и опережала свое время на 20 лет.
до открытия электрона — и никто не знал, что с ним делать, пока десятилетия спустя не стали лучше понимать полупроводниковые материалы, такие как кремний. В эти дни Эдвин Холл был бы в восторге
чтобы найти датчики, названные в его честь, используются во всех
виды интересных способов. Давайте посмотрим поближе!
Фото: Магнитное испытательное оборудование для изучения эффекта Холла.
Фото предоставлено Брукхейвенской национальной лабораторией и Министерством энергетики США (DOE).
Содержание
- Что такое эффект Холла?
- Как работает эффект Холла?
- Использование эффекта Холла
- Для чего используются датчики Холла?
- Узнать больше
Что такое эффект Холла?
Работая вместе, электричество и магнетизм могут заставить вещи двигаться:
электродвигатели, громкоговорители и
наушники — это лишь некоторые из незаменимых
современные гаджеты, которые работают таким образом. Отправить колеблющийся электрический
ток через катушку медного провода и (хотя его не видно
происходит) вы создадите временное магнитное поле вокруг катушки
слишком. Поместите катушку рядом с большим постоянным магнитом и временным
магнитное поле, создаваемое катушкой, будет либо притягивать, либо отталкивать
магнитное поле от постоянного магнита. Если катушка свободна
двигаться, он будет двигаться — либо к постоянному магниту, либо от него. В
электродвигатель, катушка настроена так, что может вращаться на месте
и поверните колесо; в громкоговорителях и
наушники, катушка приклеена
на кусок
бумага, пластик или
ткань, которая движется вперед и назад
выкачивать звук.
Фото: Вы не можете увидеть магнитное поле, но можете измерить его с помощью эффекта Холла. фото
любезно предоставлено Викискладом.
» Если ток электричества в неподвижном проводнике
сама притягивается магнитом, ток должен проходить по одной стороне провода… »Эдвин Холл , 1879
Что, если поместить кусок провода с током в магнитное поле, и провод
не можешь двигаться? То, что мы называем электричеством, обычно представляет собой поток
заряженные частицы через кристаллические (обычные, твердые) материалы (либо отрицательно заряженные электроны, находящиеся внутри атомов, либо иногда положительно заряженные «дыры» — промежутки там, где должны быть электроны).
Вообще говоря, если вы прикрепите пластину проводящего материала к батарее,
электроны будут проходить через пластину по прямой линии. Как движущиеся электрические заряды,
они также будут создавать магнитное поле. Если поместить плиту между
полюса постоянного магнита, электроны будут отклоняться в
криволинейный путь, когда они движутся через материал, потому что их собственные
магнитное поле будет взаимодействовать с полем постоянного магнита.
(Для справки: то, что заставляет их отклоняться, называется
сила Лоренца, но нам нет нужды вдаваться здесь во все подробности.)
Это означает, что на одну сторону материала будет приходиться больше электронов, чем на другую.
другом, поэтому на проводе появится разность потенциалов (напряжение).
материала под прямым углом к магнитному полю от
постоянный магнит и протекание тока. Это то, что физики называют эффектом Холла.
Чем сильнее магнитное поле, тем сильнее отклоняются электроны; чем больше ток,
тем больше электронов приходится отклонять. В любом случае, чем больше
разность потенциалов (известная как напряжение Холла) будет. В других
словами, напряжение Холла пропорционально по величине как электрическому
тока и магнитного поля. Все это имеет больше смысла в
наша маленькая анимация ниже.
Как работает эффект Холла?
- Когда через материал протекает электрический ток, электроны (показанные здесь синими точками) движутся через него практически по прямой линии.
- Поместите материал в магнитное поле, и электроны внутри него тоже окажутся в поле. На них действует сила (сила Лоренца), которая заставляет их отклоняться от прямолинейного пути.
- Теперь, глядя сверху , электроны в этом примере изгибались бы, как показано: с их точки зрения, слева направо. С большим количеством электронов на правой стороне материала (внизу на этом рисунке), чем на левой (вверху на этом рисунке), между двумя сторонами будет разность потенциалов (напряжение), как показано зеленым цветом. линия со стрелкой. Величина этого напряжения прямо пропорциональна величине электрического тока и напряженности магнитного поля.
Куда они идут?
Как узнать, в какую сторону будут двигаться электроны? Вы можете определить направление силы Лоренца с помощью правила левой руки Флеминга (если вы делаете поправку на обычный ток) или его правила правой руки (если вы этого не делаете).
Работа: на заряженные частицы, движущиеся в магнитном поле, действует сила (сила Лоренца), которая меняет их направление, вызывая эффект Холла. Вы можете использовать правило левой руки Флеминга (моторное правило), чтобы определить направление силы, если вы помните, что это правило применимо к обычному току (поток положительных зарядов) и поле течет с севера на юг. В этом примере, если у нас есть поток электронов на страницу, обычный ток течет из страницы (так что это направление, в котором должен указывать ваш второй палец). Если поле течет слева направо (указательный палец), большой палец говорит нам, что электроны будут двигаться вверх.
Использование эффекта Холла
С помощью эффекта Холла можно обнаруживать и измерять все, что угодно
как датчик Холла или пробник. Эти термины иногда используются
взаимозаменяемы, но, строго говоря, относятся к разным вещам:
- Датчики Холла просты, недороги,
электронные чипы, которые используются
во всех видах широко доступных гаджетов и продуктов. - Датчики на эффекте Холла являются более дорогими и сложными приборами.
в научных лабораториях для таких вещей, как измерение напряженности магнитного поля с очень высокой точностью.
Фото: 1) Типовой кремниевый датчик Холла. Это выглядит
очень похоже на транзистор — неудивительно, поскольку он сделан аналогичным образом.
Фото с сайтаобъяснения.com. 2) Зонд на эффекте Холла, использовавшийся НАСА в середине 1960-х годов. Фото предоставлено
Исследовательский центр Гленна НАСА (НАСА-GRC).
Обычно изготавливаются из полупроводников (таких материалов, как кремний и германий), эффект Холла
датчики работают, измеряя напряжение Холла на двух своих гранях
если поместить их в магнитное поле. Некоторые датчики Холла
упакованы в удобные микросхемы со схемами управления и могут быть
подключены непосредственно к большим электронным схемам. Самый простой способ
использование одного из этих устройств для определения положения чего-либо. За
Например, вы можете поместить датчик Холла на дверную раму и магнит.
на двери, поэтому датчик определяет, открыта дверь или закрыта
от присутствия магнитного поля. Такое устройство называется
датчик приближения. Конечно, вы можете сделать ту же работу так же легко
с магнитным герконом
(нет общего правила относительно того,
герконы старого образца или современные датчики Холла лучше.
зависит от приложения). В отличие от герконов, которые являются механическими и полагаются на контакты
двигаясь в магнитном поле, датчики Холла полностью электронные и не имеют движущихся частей, поэтому
(теоретически, по крайней мере) они должны быть более надежными. Одна вещь, которую вы не можете сделать с помощью геркона, — это определение степени «включенности» — силы магнетизма — потому что геркон либо включен, либо выключен. Вот что делает датчик Холла таким полезным.
Рекламные ссылки
Для чего используются датчики Холла?
Датчики Холла дешевы, прочны и надежны, компактны и просты в использовании.
так что вы найдете их во множестве различных машин и бытовых устройств,
от автомобильных зажиганий до компьютерных клавиатур и заводских роботов до велотренажеров
Вот один очень распространенный пример, который вы можете использовать в своем компьютере прямо сейчас. В
бесщеточный двигатель постоянного тока (используемый в таких устройствах, как дисководы для жестких и гибких дисков), вы должны иметь возможность в любой момент точно определить, где находится двигатель. Датчик Холла
рядом с ротором (вращающейся частью двигателя) сможет
определить его ориентацию очень точно, измеряя изменения в
магнитное поле. Подобные датчики также можно использовать для измерения скорости.
(например, для подсчета скорости вращения колеса или двигателя автомобиля
кулачок или коленчатый вал вращается). Вы часто найдете
их в электронных спидометрах
и анемометры (измерители скорости ветра), где они могут быть использованы
аналогично герконовым переключателям.
Фото: Этот небольшой бесщеточный двигатель постоянного тока от старого дисковода для гибких дисков имеет три датчика Холла.
(обозначены красными кружками), расположенные вокруг его края, которые обнаруживают движение ротора двигателя (вращающийся постоянный магнит) над ними (не показано на этой фотографии). На датчики особо не на что смотреть, как вы можете видеть на фото крупным планом справа!
Потребовалось несколько десятилетий, чтобы революционное открытие Эдвина Холла прижилось, но теперь
используется в самых разных местах — даже в электромагнитных космических ракетных двигателях.
Не будет преувеличением сказать, что новаторская работа Холла произвела настоящий эффект!
Изображение: упаковка типичного датчика Холла. Магнитные поля могут быть очень слабыми, поэтому нам нужно, чтобы наши детекторы были как можно более чувствительными, и вот один из способов добиться этого. Сама микросхема Холла (зеленая, 17) установлена на железной несущей пластине (серая, 16), зажатой между двумя формованными пластиковыми секциями (серые, 11, 12). Микросхема подключается проводами (19) к контактным выводам (синие), с помощью которых она может быть подключена к цепи. Но действительно важными частями являются два «концентратора потока» из мягкого железа (оранжевые, 15, 21), которые делают устройство намного более чувствительным. Когда вы помещаете магнит (22) рядом с датчиком, эти концентраторы позволяют магнитному потоку («плотность» магнетизма, создаваемого магнитным полем), течь по непрерывному контуру через микросхему Холла, создавая либо положительное, либо отрицательное напряжение. Если магнит скользит к другой стороне датчика, он создает противоположное напряжение. Иллюстрация из патента США 3 845 445: Модульное устройство на эффекте Холла, автор Роланд Браун и др., IBM Corporation, 29 октября., 1974 г., любезно предоставлено Управлением по патентам и товарным знакам США.
Узнайте больше
На этом сайте
- Электричество
- Магнетизм
- Электродвигатели
- Ступичные двигатели
- Герконы
Статьи
- Графеновый магнитный датчик в сто раз более чувствительный, чем кремний от Декстера Джонсона. IEEE Spectrum, 26 июня 2015 г. Немецкие исследователи разрабатывают магнитные датчики Холла на основе графена.
- Как измерить магнитное поле? Ретт Аллен. Wired, 21 января 2014 г. Сравнение традиционных компасов с датчиками Холла в смартфоне.
- Нобелевская премия по физике 1998 года: Дробный квантовый эффект Холла: упрощенное описание физики, за которое Хорст Штормер, Роберт Лафлин и Даниэль Цуй получили премию. Для более подробного описания попробуйте The Quantized Hall Effect by H.L. Stormer and D.C. Tsui, Science, 17 Jun 1983.
История
- [PDF] Открытие эффекта Холла Г. С. Лидстоуном, Physics Education, Volume 14, 1979. Как Холл открыл свой эффект и понял, что он означает, оспаривая некоторые из более ранних работ Джеймса Клерка Максвелла. .
Более технический
- Вертикальное устройство на эффекте Холла, Р. С. Попович, IEEE Electron Device Letters, том 5, № 9, стр. 357–358, сентябрь 1984 г., doi: 10.1109/EDL. 1984.25945.
Статьи Эдвина Холла
- О новом действии магнита на электрические токи автора
Эдвин Х. Холл, Американский математический журнал, Vol. 2, № 3 (сентябрь 1879 г.), стр. 287–292. Оригинальная статья Холла. - Объяснение феномена Холла Эдвином Х. Холлом,
Наука, Том. 3, № 60 (28 марта 1884 г.), стр. 386–387. Собственное описание Холла и объяснение его оригинального эксперимента. - Теория эффекта Холла и связанного с ним эффекта для некоторых металлов Эдвина Х. Холла, PNAS USA, Vol. 9, № 2 (15 февраля 1923 г.), стр. 41–46. Одна из более поздних работ Холла.
Книги
- Датчики на эффекте Холла: теория и приложения Эдварда Рамсдена. Newnes, 2006. Охватывает физику датчиков Холла и способы их включения в практические схемы. Включает датчики приближения, датчики тока и датчики скорости и времени. Также есть удобный глоссарий и список поставщиков.
- Приборы на эффекте Холла Р. С. Поповича. Институт физики, 2004 г. Несколько большая и более подробная книга, но охватывающая ту же тему со смесью теории, практических схем и повседневных приложений.
- Эффект Холла и его приложения К. Чиена (ред.). Plenum Press, 1980/Springer, 2013. Переиздание материалов симпозиума 1979 г. в Университете Джона Хопкинса, 13 ноября 1979 г., посвященного 100-летию открытия Холла.
- Эффект Холла в металлах и сплавах, Колин Херд. Спрингер 1972/2012. Современное переиздание вступления 1970-х годов.
Практические проекты
- Светодиодное освещение, активируемое дверью, с использованием датчиков Холла: Woody1189 подключает свой шкаф к датчику Холла, поэтому он автоматически загорается, когда он открывает дверь!
- Мотор-втулка для электровелосипеда — как заменить датчик Холла: Джереми Нэш объясняет, что делает датчик Холла в бесщеточном двигателе — и как заменить датчик в случае его отказа.
Видео
- Как сделать магнитную схему обнаружения полярности: Томас Ким показывает нам, как сделать магнитный детектор на основе датчика Холла, извлеченного из вентилятора кулера ноутбука.
Патенты
Еще несколько технических примеров детекторов Холла и их использования:
- Патент США 3,845,445A: Модульное устройство на эффекте Холла Р. Браун и др., IBM, 29 октября 1974 г. Концентрирующее модульное устройство на эффекте Холла проиллюстрировано выше.
- Патент США 3,845,445A: Устройство на элементе Холла с защитным барьером области истощения, автор Р. Попович, Siemens, 29 мая., 1990. Элемент Холла, который можно включить в интегральную схему, рассчитанную на долгий срок службы.
Пожалуйста, НЕ копируйте наши статьи в блоги и другие веб-сайты.
Статьи с этого веб-сайта зарегистрированы в Бюро регистрации авторских прав США. Копирование или иное использование зарегистрированных произведений без разрешения, удаление этого или других уведомлений об авторских правах и/или нарушение смежных прав может повлечь за собой серьезные гражданские или уголовные санкции.
Авторские права на текст © Chris Woodford 2009, 2020. Все права защищены. Полное уведомление об авторских правах и условия использования.
Подпишитесь на нас
Оцените эту страницу
Пожалуйста, оцените эту страницу или оставьте отзыв, и я сделаю пожертвование WaterAid.
Сохранить или поделиться этой страницей
Нажмите CTRL + D, чтобы добавить эту страницу в закладки на будущее или рассказать о ней друзьям:
Цитировать эту страницу
Вудфорд, Крис. (2009/2020) Датчики Холла. Получено с https://www.explainthatstuff.com/hall-effect-sensors.html. [Доступ (вставьте дату здесь)]
Подробнее на нашем веб-сайте…
- Средства связи
- Компьютеры
- Электричество и электроника
- Энергия
- Машиностроение
- Окружающая среда
- Гаджеты
- Домашняя жизнь
- Материалы
- Наука
- Инструменты и инструменты
- Транспорт
↑ Вернуться к началу
Причина и следствие: поиск и устранение неисправностей датчиков Холла
Лампа из китового жира освещала место над кухонным столом, где Эдвин работал с тонкой прямоугольной полоской золотой фольги. Он мог видеть свое отражение в полосе, и его мысли на мгновение дрейфовали, когда он думал о том, каким усталым он выглядит. Было очень поздно, но Эдвин увлекся чем-то новым, чем-то очень новым. Эдвин Холл работал над теорией потока электронов Кельвина, которая была представлена 30 годами ранее, в 1849 году.. Во время работы он случайно заметил, что если через золотую полоску протекал ток и к одной стороне полоски было приложено магнитное поле, то на краях полоски регистрировалась разность электрических потенциалов. Это открытие было приписано доктору Эдвину Холлу, и теперь оно называется эффектом Холла.
Как и многие другие открытия, блестящее наблюдение доктора Холла произошло не благодаря его поиску, а благодаря обнаружению чего-то необычного и последующему действию. Эффект Холла известен уже более 100 лет, но приложения для его использования не разрабатывались до последних нескольких десятилетий. Автомобильная промышленность применила эту технологию ко многим системам, используемым в современных автомобилях, включая трансмиссию, контроль над кузовом, антипробуксовочную систему и антиблокировочную тормозную систему. Чтобы охватить эти различные системы, датчик на эффекте Холла конфигурируется несколькими различными способами: переключением, аналоговым и цифровым. Это датчики приближения; они не вступают в прямой контакт, а используют магнитное поле для активации электронной схемы.
Эффект Холла можно получить с помощью таких проводников, как металлы и полупроводники, и качество эффекта зависит от материала проводника. Материал будет непосредственно воздействовать на электроны или положительные ионы, протекающие через него. В автомобильной промышленности обычно используются три типа полупроводников для изготовления элемента Холла/арсенида галлия (GaAs), антимонида индия (InSb) и арсенида индия (InAs). Наиболее распространенным из этих полупроводников является арсенид индия. Как и в эксперименте доктора Холла, важно, чтобы проводник был прямоугольным и очень тонким. Это позволяет носителям, проходящим через него, разделяться и объединяться по краям.
Теперь давайте рассмотрим принцип эффекта Холла (рис. 1 и 2 выше). Если по проводнику течет ток и магнитное поле (магнитный поток) движется по проводнику перпендикулярно потоку тока, заряженные частицы дрейфуют к краям прямоугольной полосы. Эти заряженные частицы собираются на краях поверхности. Магнитный поток воздействует на проводник силой, в результате чего напряжение (положительная сила) смещается к одному краю, а электроны (отрицательная сила) смещаются к противоположному краю. Сила, действующая на ток, называется силой Лоренца.
Пока к проводнику прикладывается магнитная сила, держатели остаются на противоположных сторонах, создавая падение напряжения на проводнике. Этот перепад напряжения является напряжением Холла. Он пропорционален протекающему через него току, напряженности магнитного поля и типу материала проводника. Если какая-либо из этих трех переменных изменится, перепад напряжения на проводнике также изменится. Вот почему элемент Холла должен иметь регулируемое напряжение, приложенное к цепи тока. Если ток регулируется и материал проводника задан, единственное, что остается изменить, — это напряженность магнитного поля. При изменении напряженности магнитного поля на 9под углом 0° к пути тока изменяется и падение напряжения на проводнике. Чем интенсивнее магнитный поток, тем больше падение напряжения на проводнике.
Генерируемое напряжение Холла представляет собой аналоговый сигнал. Этот сигнал Холла очень мал (обычно около 30 микровольт) при магнитном поле силой 1 гаусс. Из-за небольшого генерируемого напряжения сигнал Холла должен быть усилен, если устройство будет использоваться для практических приложений.
Тип усилителя, который лучше всего подходит для использования с элементом Холла, — это дифференциальный усилитель (рис. 3 на стр. 56), который усиливает только разность потенциалов между положительным и отрицательным входами. Если нет разности напряжений между положительным и отрицательным входами усилителя, выходного напряжения усилителя не будет. Однако при наличии перепада напряжения эта разность будет иметь линейное усиление. Величина усиления определяется дифференциальным усилителем, используемым в схеме.
Элемент Холла подключен непосредственно к дифференциальному усилителю, поэтому активность элемента Холла отражается усилителем. Когда магнитное поле в элементе Холла отсутствует, напряжение Холла не создается и выходное напряжение усилителя отсутствует. Когда к элементу Холла прикладывается магнитное поле, на элементе создается напряжение Холла. Дифференциальный усилитель обнаруживает этот перепад напряжения и усиливает его.
Способ использования датчика Холла определяет изменения схемы, необходимые для обеспечения надлежащего вывода на управляющее устройство. Этот выход может быть аналоговым, например датчик положения ускорения или датчик положения дроссельной заслонки, или цифровым, например датчик положения коленчатого или распределительного вала.
Давайте рассмотрим эти различные конфигурации датчика Холла. Когда элемент Холла должен использоваться для аналогового датчика, который можно использовать для шкалы температуры в системе климат-контроля или датчика положения дроссельной заслонки в системе управления силовым агрегатом, сначала необходимо изменить схему. Элемент Холла подключен к дифференциальному усилителю, а усилитель подключен к транзистору NPN (рис. 4). Магнит прикреплен к вращающемуся валу. При вращении вала магнитное поле на элементе Холла усиливается. Создаваемое напряжение Холла пропорционально напряженности магнитного поля.
Если бы PCM контролировал вал дроссельной заслонки, магнит вращался бы вместе с валом дроссельной заслонки. На холостом ходу дроссельная заслонка была бы закрыта. В этом случае напряженность магнитного поля будет низкой и создаваемое напряжение Холла будет низким. Дифференциальный усилитель будет иметь небольшую разность потенциалов, и выходной сигнал усилителя будет низким. На базу транзистора NPN будет поступать выходной сигнал усилителя.
Поскольку напряжение на базе низкое, усиление транзистора NPN также низкое. В этом случае выходное напряжение TPS будет порядка 1 вольта. Когда двигатель находится под нагрузкой, вал дроссельной заслонки вращается, открывая дроссельную заслонку. При вращении вала дросселя магнитное поле на элементе Холла усиливается. Создаваемое напряжение Холла увеличивается пропорционально напряженности магнитного поля. По мере увеличения напряжения Холла дифференциальный усилитель получает его разность потенциалов. Затем усилитель усиливает разницу между отрицательным и положительным входами. Этот увеличивающийся выходной сигнал отправляется на базу NPN-транзистора, который затем усиливает сигнал, создавая выходной сигнал датчика положения дроссельной заслонки. Этот линейный выходной сигнал пропорционален вращению вала дроссельной заслонки.
Выходной сигнал TPS отправляется в PCM, где он сообщает об угле дроссельной заслонки. Микропроцессор PCM не может напрямую считывать аналоговое напряжение, отправленное TPS. Этот сигнал необходимо преобразовать в двоичный формат — 1 и 0. Для этого используется устройство, называемое аналого-цифровым преобразователем. В большинстве случаев используется 8-битный аналого-цифровой преобразователь. Это устройство преобразует уровень напряжения в последовательность 1 и 0, которую микропроцессор может декодировать и использовать для фактического угла поворота вала дроссельной заслонки.
Если элемент Холла должен использоваться для цифрового сигнала, например, в датчике положения коленчатого или распределительного вала или датчике скорости автомобиля, сначала необходимо изменить схему. Элемент Холла подключен к дифференциальному усилителю, который подключен к триггеру Шмитта. В этой конфигурации датчик выдает цифровой сигнал включения/выключения. В большинстве автомобильных цепей датчик Холла является приемником тока или заземляет сигнальную цепь. Для этого к выходу триггера Шмитта подключается NPN-транзистор (рис. 5). Магнит расположен напротив элемента Холла. Триггерное колесо или мишень расположены таким образом, что затвор может находиться между магнитным полем и элементом Холла.
Когда заслонка не находится между магнитом и элементом Холла, магнитное поле проникает в элемент Холла, создавая напряжение Холла. Это напряжение подается на положительный и отрицательный входы дифференциального усилителя. Усилитель усиливает это дифференциальное напряжение и подает его на вход триггера Шмитта (цифровое триггерное устройство). Когда напряжение от дифференциального усилителя увеличивается, оно достигает порога включения или точки срабатывания. В этот момент триггер Шмитта меняет свое состояние, позволяя послать сигнал напряжения.
Точка срабатывания (выключения) настроена на более низкое напряжение, чем точка включения. Целью этой разницы между точками включения и выключения (гистерезис) является устранение ложных срабатываний, которые могут быть вызваны незначительными отклонениями от дифференциального усилителя. Триггер Шмитта включается, и выходное напряжение подается на базу NPN-транзистора. При наличии напряжения на базе транзистора транзистор открыт.
Регулятор напряжения блока управления подает напряжение на резистор или нагрузку. Цепь резистора подключена к коллектору транзистора NPN, и когда NPN включен, ток течет в коллектор и из эмиттера на землю. В этом состоянии сигнал притягивается к земле. Поскольку резистор находится внутри блока управления, напряжение находится на плече заземления и будет падать очень близко к напряжению заземления.
При вращении спускового колеса заслонка перемещается между магнитом и элементом Холла. Поскольку спусковое колесо изготовлено из черного металла, оно притягивает магнитное поле к затвору. В этот момент в элемент Холла больше не проникает магнитное поле, и напряжение Холла не создается. Без напряжения Холла дифференциальный усилитель не имеет выхода на триггер Шмитта. В свою очередь, триггер Шмитта не имеет выхода напряжения на базу NPN-транзистора, и транзистор меняет состояние и закрывается. Затем земля снимается с нагрузки. Это создает разомкнутую цепь. В разомкнутой цепи присутствует напряжение источника. Если бы регулятор напряжения был источником 5 вольт, то напряжение в разомкнутой цепи было бы 5 вольт. При вращении затвора он выходит из пространства между магнитом и элементом Холла. Включается цепь, замыкающая заземляющую ветвь от нагрузки. Таким образом, напряжение сигнала падает очень близко к земле. Этот цикл повторяется для создания цифрового сигнала от датчика Холла с экранированным полем.
Зубчатый датчик Холла (рис. 6) представляет собой еще один тип цифрового датчика включения/выключения. Смещающий магнит помещается над элементом Холла. В этом датчике магнитное поле всегда проникает через элемент Холла и всегда присутствует напряжение Холла. Когда зубец шестерни или мишень проходит под элементом Холла, в элементе усиливается магнитное поле. По мере усиления магнитного поля напряжение Холла увеличивается. Это напряжение отправляется в схему, которая сравнивает выходное напряжение Холла без зубца с выходным напряжением зубца Холла.
Чтобы этот датчик сработал, цель должна пройти мимо элемента Холла. В положении без зубца конденсатор заряжается для хранения напряжения Холла без зубца, чтобы он мог сравнивать его с напряжением Холла с зубцом. Когда передняя кромка зуба приближается к датчику, напряжение Холла увеличивается до заданной рабочей точки. В этот момент компаратор посылает сигнал на триггерную схему. Триггер подает сигнал напряжения на NPN-транзистор и включает его. Транзистор NPN подключен к цепи резистора в блоке управления.
Одна сторона резистора подключена к регулятору напряжения, другая сторона к коллектору NPN-транзистора. Когда транзистор меняет состояние и включается, сигнальное напряжение притягивается к земле. Когда цель вращается и задняя кромка зубца проходит мимо датчика Холла, напряжение падает ниже заданной точки сброса, и компаратор подает напряжение на триггерную схему и выключает NPN-транзистор. Затем транзистор меняет состояние и размыкает цепь. Теперь в сигнальной цепи присутствует напряжение источника. Если регулятор является источником 5 вольт, напряжение сигнала теперь 5 вольт. Когда зуб проходит под датчиком Холла, цепь активируется и притягивает этот 5-вольтовый сигнал к земле. Этот цикл повторяется, чтобы создать цифровой выход датчика Холла с зубчатой передачей.
Для устранения неполадок в этих цепях (см. рис. 7 и 8) необходимо измерить падение напряжения на цепи питания, заземления и сигнала. Если сигнал правильный на низком и высоком выходе, питание и заземление также будут в порядке. Если источником питания является напряжение батареи, регулятор напряжения находится внутри датчика Холла. Если питание подается от электронного модуля, регулятор напряжения находится в этом модуле. Если источник питания падает из-за падения напряжения (сопротивления) или из-за проблем с регулятором, выходной сигнал также падает. Если мощность увеличивается, выходной сигнал также увеличивается. Если напряжение земли увеличивается из-за падения напряжения (сопротивления), выходной сигнал также увеличивается.
При использовании аналогового датчика Холла, если есть падение напряжения или обрыв цепи между датчиком Холла и модулем управления, напряжение сигнала будет правильным на датчике, но неправильным на модуле. Если напряжение на модуле правильное, а напряжение на сканирующем приборе неправильное, проблема может заключаться в аналого-цифровом преобразователе внутри блока управления. Всегда проверяйте питание, заземление и сигналы на модуле управления перед заменой устройства.
Для устранения неполадок цифрового датчика необходим осциллограф. Следующие рекомендации помогут поставить диагноз:
• При использовании цифрового датчика Холла, если сигнал на датчике высокий, периодически отсутствует или полностью вышел из строя, цепь от модуля управления исправна.
•Разные блоки управления используют разные уровни напряжения сигнала; 5, 8, 9 и 12 вольт являются общими. Этот уровень напряжения сигнала должен быть в пределах 10% от целевого напряжения, иначе блок управления не обнаружит изменение состояния напряжения.
• Если сигнал низкий, периодически пропадает или полностью не работает, регулятор напряжения или цепь в блоке управления могут быть неисправны, сигнальный провод может быть разомкнут или заземлен, или датчик Холла может быть неисправен и тянет сигнал на землю.
•Если уровень напряжения датчика на массу не находится в пределах 10% от напряжения на массу автомобиля, блок управления не обнаружит изменение состояния сигнала.
• Если напряжение зависло на высоком или низком уровне, убедитесь, что цель движется.
• При выходе из строя нескольких датчиков Холла убедитесь, что цель не попадает ни в один из них.
• Когда сигнальный провод Холла закорочен или периодически или постоянно замыкается на источник питания, он сжигает электронные схемы внутри датчика Холла и обычно замыкает сигнал на землю. Датчик Холла рассчитан на ток 20 миллиампер или меньше. Резистор расположен в сигнальной цепи, поэтому он может ограничивать ток, протекающий через эту цепь. Если сопротивление этого резистора упадет, протекающий ток увеличится, что приведет к множественным отказам датчика Холла.
Существует множество конфигураций датчиков Холла. Все эти устройства работают по одним и тем же основным принципам, описанным здесь. Когда вы работаете в своем сервисном отсеке, пусть ваш блеск сияет, как у доктора Эдвина Холла. Обращайте внимание на то, что необычно, и действуйте в соответствии с этим.
Скачать в формате PDF0103
- Для создания комфортного автомобильного салона
Бесшумная и тихая работа - Для снижения нагрузки на автомобильный аккумулятор
Работающий с высокой эффективностью - Удобный дизайн
Низкопрофильный и компактный
ZCL TM ИС на эффекте Холла соответствуют этим требованиям
Новое поколение ИС на эффекте Холла
сокращает проектные работы
и позволяет производить
высокопроизводительные двигатели
ИС на эффекте Холла ZCL — это метод, оптимизированный для управления бесщеточным двигателем постоянного тока Объясняет первый в мире механизм обнаружения ИС на эффекте Холла для управления двигателем BLDC использует плотность магнитного потока от вращающихся магнитов. Микросхема на эффекте Холла ZCL изменяет выходной сигнал в точке изменения полярности (точка пересечения нуля), независимо от величины плотности магнитного потока. Точка пересечения нуля является постоянной, поскольку на нее не влияют изменения расстояния между магнитами и датчиком или изменения температуры. ИС на эффекте Холла ZCL упрощает сложные программные калибровки и расчеты допусков. Эти преимущества еще больше упрощают конструкцию двигателей постоянного тока с неизменно высоким КПД и низким уровнем шума. Технология ZCL обеспечивает обнаружение даже магнитного потока, создаваемого крошечными магнитами. Этот новый корпус представляет собой TSOT-23-3S (2,9 x 2,8 x t0,8 мм), корпус с самым низким профилем в мире, в котором расстояние между магнитом и печатной платой сокращается до размеров, соответствующих мировому стандарту SOT-23-3. (2,9 х 2,8 х t1,3 мм) упаковка. — Высокая устойчивость к электростатическому разряду Чтобы справиться с суровыми условиями во время установки двигателя, он имеет защиту от электростатического разряда HBM:8,000. — Встроенная схема защиты от обратного напряжения Предотвращает повреждение интегральных схем на эффекте Холла из-за обратного соединения, вызванного подключением к аккумулятору или ремонтом автомобиля. — Автомобильное качество Предполагая использование в суровых условиях, серия S-57TZ S была подвергнута тройным температурным испытаниям (низкая, нормальная, высокая) для использования в суровых условиях.
новое поколение ИС на эффекте Холла
, которые изменяют выходной сигнал в точке
, меняют полярность (точка пересечения нуля) и используют
первое в мире обнаружение *1
.
≫»Что такое интегральная схема на эффекте Холла ZCL?» 3 Преимущества интегральной схемы на эффекте Холла ZCL при проектировании двигателей
На определение угла поворота не так легко влияют изменения магнитного потока
[Лучший в мире] Компактный и низкопрофильный корпус двигателя
Чтобы использовать эту технологию в максимально возможной степени, серия S-57TZ S доступна в корпусе для поверхностного монтажа, который обеспечивает очень гибкое размещение. Технические характеристики идеально подходят для автомобильного двигателя
Кроме того, он поддерживает PPAP и соответствует стандарту AEC-Q100 (класс рабочей температуры 0).
Приложение
Автомобильный двигатель BLDC
Идеально подходит для применений, требующих высокой эффективности, высокой надежности и низкого уровня шума
— Электропривод раздвижных дверей/задних дверей с электроприводом, работающих при выключенном зажигании
— Электродвигатели вентиляторов / сиденья с электроприводом, работающие при выключенном двигателе
[Автомобилестроение] ИС на эффекте Холла для двигателей
Таблица выбора≫
Характеристики
| Название продукта | S-57TZ Серия S | |
|---|---|---|
| Для автомобилей | ||
| Диапазон напряжения питания | В DD = от 2,7 В до 26,0 В | |
| Обнаружение полюса | Обнаружение ZCL | |
| Выходная логика * | V OUT = «L» при обнаружении S полюса / V OUT = «H» при обнаружении S полюса | |
| Форма вывода * | Nch выход с открытым стоком / драйвер Nch + встроенный подтягивающий резистор (тип. 1,2 кОм) | |
| Точка фиксации пересечения нуля | B Z =0,0 мТл тип. | |
| Точка разблокировки (S-полюс) * | B RS = 3,0 мТл, тип. / B RS = 6,0 мТл, тип. | |
| Частота измельчения | f C = 500 кГц тип. | |
| Время задержки выхода | t D =8,0 мкс тип. | |
| Диапазон рабочих температур | Ta = от −40°C до +150°C | |
| Автомобильное качество | Поддержка PPAP, соответствует стандарту AEC-Q100 | |
| Технический паспорт | ||
*Эту опцию можно выбрать.
Купить онлайн
ZCL является товарным знаком ABLIC Inc.
(*1) На основе нашего исследования по состоянию на сентябрь 2018 г.
ZCL является товарным знаком ABLIC Inc. (*1) На основании нашего исследования по состоянию на сентябрь 2018 г.
Двигатель BLDC с датчиком Холла Т-образный двигатель R60 KV115 – Oz Robotics
177,90 долл. США
Электродвигатель с точным моделированием электромагнитных полей, отвечающий самым строгим требованиям.
BLDC Motor с датчиком Холла T-Motor R60 KV115 количество
Добавить в мой список желаний
Сделано в: Китай
Сделано Tmotor
Артикул: R60 KV115
Категории: BLDC Motors, Двигатели
Теги: бдц, зал, мотор, робот, tmotor
Еще от: T-Motor
Описание
Отзывы (0)
Руководства
Поставщик
Политики
Перевозки
Задайте вопрос
Стать продавцом
Стать партнером
Электродвигатель BLDC с датчиком Холла T-Motor R60 KV115
- Интегрирован с датчиками Холла, Edeg120±20°
- Специальная конструкция рассеивания тепла
- Низкий крутящий момент и инерция ротора
- Максимальный крутящий момент 2,3 Нм
Руководства по продуктам
Если применимо, документация по продукту, справочные материалы, проекты САПР, файлы . STEP и/или другие файлы чертежей, руководства и учебные пособия будут доступны для загрузки при покупке . Электронное письмо с подтверждением заказа будет содержать ссылку для загрузки на файл(ы) продукта, который также можно загрузить с веб-сайта 9.0005 Мой аккаунт раздел при необходимости.
Политика доставки
МЫ ДОСТАВЛЯЕМ ПО ВСЕМУ МИРУ: В основном мы отправляем через FedEx, UPS, DHL, EMS, TNT и USPS, потому что они быстрые, надежные и легко отслеживаемые. Обычно мы отправляем в течение двух-трех рабочих дней после полной оплаты. Стандартная доставка обычно происходит в течение 5-7 рабочих дней после даты отправки. Однако иногда доставка может занять от 7 до 10 рабочих дней, в зависимости от пункта назначения доставки, режима логистики, погодных условий, веса продукта, размера или структуры распределения транспортной компании на основе перепланирования, например нехватки персонала, вызванной COVID.
СТОИМОСТЬ ДОСТАВКИ:
Для некоторых промышленных товаров, например тяжелых колес, станков с ЧПУ и т. д., стоимость доставки рассчитывается на основе веса продукта, а не количества. Чтобы воспользоваться более низкой стоимостью доставки для заказов, состоящих из нескольких товаров, не стесняйтесь обращаться к нам по адресу [email protected]. Наши тарифы на доставку очень четко указаны на странице каждого продукта во вкладке «ДОСТАВКА». Кроме того, чтобы увидеть стоимость доставки для вашей страны, добавьте товар в корзину; Вы увидите стоимость доставки в зависимости от вашей страны и местоположения.
ТАМОЖНИ И ТАРИФЫ: Хотя не для всех продуктов требуются таможенные сборы, для некоторых продуктов может потребоваться минимальный тариф, если это применимо в вашей стране, для заказов на сумму 2500,00 долларов США и выше. Или товары китайского происхождения, на которые распространяются тарифные правила, стоимостью более 800 долларов США. Общая сумма вашего заказа не включает таможенную пошлину/тариф. Тариф принадлежит покупателю, когда это применимо. Почему мы не добавляем тарифы к розничной цене товара? — Если бы все страны вычитали одинаковую сумму тарифа, мы бы добавили сумму тарифа к цене товара. Однако мы этого не делаем, потому что каждая страна взимает разную сумму, а некоторые вообще не взимают. Поэтому мы не можем добавить какой-либо тариф к розничной цене продукта. Oz Robotics, партнер-производитель или поставщик не несут ответственности за тарифы. Пожалуйста, проверьте этикетки «Сделано в» и «Сделано в» на странице продукта, чтобы увидеть происхождение продукта. Общая сумма вашего заказа не включает пошлины, налоги на импорт, таможенные сборы и налог на товары и услуги. Покупатель должен оплатить все импортные пошлины. Нажмите здесь, чтобы узнать больше о тарифах.
Политика возврата
COVID: Мы приостанавливаем возврат продукции из-за текущей пандемии COVID-19, если нет производственного брака. Пожалуйста, изучите продукт и задайте нам вопросы перед покупкой. Спасибо.
ОТМЕНА ЗАКАЗА: После размещения заказа у вас есть 5 часов, чтобы запросить отмену заказа. Через 5 часов ваши товары либо уже отправлены, либо подготовлены к отправке, либо в настоящее время изготавливаются на заказ. Это означает, что мы не будем обрабатывать ваш запрос на отмену по истечении этого периода. Размещая заказ, вы подтверждаете, что согласны с нашей Политикой отмены заказа.
ПЛАТА ЗА УСЛУГИ PAYPAL и STRIPE: Обратите внимание, что PayPal и Stripe не возмещают плату за обслуживание, которую они взимают при покупке продукта. Поэтому, если после размещения заказа вы передумаете и попросите возмещение, мы вычтем плату за обслуживание для PayPal или Stripe, в зависимости от того, какой из них вы использовали для покупки. Если у вас есть какие-либо вопросы по этому поводу, обратитесь в PayPal или Stripe.
ПОЛИТИКА ОБМЕНА: Oz Robotics хочет, чтобы вы остались довольны своей новой покупкой. Тем не менее, мы соблюдаем политику обмена наших поставщиков, потому что мы не производим эти продукты; наши поставщики делают. После того, как вы воспользовались продуктом, наш поставщик(и) и мы имеем право не возвращать деньги. Тем не менее, мы предложим обмен ошибочно приобретенных товаров или продуктов с серьезными и необратимыми дефектами или техническими проблемами. Покупатель оплачивает стоимость доставки неправильно приобретенных товаров или любых других подобных проблем. Если приобретенный вами продукт неисправен, напишите нам по адресу [email protected], приложив несколько фотографий или видео дефектных деталей, чтобы оценить их перед отправкой. Нажмите ЗДЕСЬ, чтобы узнать больше о политике возврата и замены
ПОЛИТИКА ВОЗВРАТА: Oz Robotics принимает возмещение на минимальной основе, за исключением случаев производственного брака. Для любых электронных товаров возврат принимается только для устройств с серьезными и необратимыми проблемами; Между тем, клиент должен подать заявку на возврат в течение семи дней с даты доставки. Перед принятием возмещения, пожалуйста, включите изображения или видео и любые другие материальные доказательства дефекта. Тем не менее, мы соблюдаем политику обмена наших поставщиков, потому что мы не производим эти продукты; наши поставщики делают. Для получения дополнительной информации о политике возврата и замены посетите страницу Политика возврата и замены.
Помимо политики нашего поставщика по умолчанию, после согласования возврата вы можете отправить дефектный товар на указанный обратный адрес, который вы должны получить от нас в первую очередь. Пожалуйста, отправьте заказ в оригинальной упаковке со всеми принадлежностями и дополнительными деталями. Если Требуемые детали не будут отправлены обратно, за них будет выставлен счет или ожидается их отправка на более позднем этапе. И только после того, как все товары будут доставлены, наши сотрудники проверят возвращенный товар на тестирование. Включите в свой пакет подписанное письмо с указанием причины вашего возврата и оригинальную квитанцию, а также любые упомянутые доказательства дефекта, изображения или видео и т. д. Это поможет нам ускорить процесс от вашего имени.
Покупатель (заказчик/покупатель) несет ответственность за все расходы по доставке при возврате товара. Однако при получении возвращенного заказа мы оценим товар. Если будет установлено, что на самом деле существует производственный брак, мы возместим стоимость доставки, а также отремонтируем или заменим или возместим полную сумму покупателю, если продукт не подлежит ремонту.
Если вы хотите вернуть неиспользованный продукт, сделайте это в течение семи дней с даты отправки для возмещения покупной цены за вычетом доставки и обработки. Возврат будет зачислен на исходную кредитную карту, использованную для оплаты, в течение 24-48 ЧАСОВ после получения товара обратно. Мы будем взимать плату за пополнение запасов 50%.
После того, как ваше возвращение будет получено и проверено, и если будет согласовано возмещение, возмещение будет зачислено на исходную кредитную карту, использованную для оплаты, в течение 24-48 часов. Обратите внимание, что мы взимаем 50% комиссию за пополнение запасов, как только вы вернете товар без каких-либо дефектов.
Как только ваш возврат будет обработан, PayPal вернет деньги на использованную карту. Это может занять не менее пяти рабочих дней (в зависимости от банка и кредитной компании), прежде чем ваш возврат будет опубликован на вашем банковском счете и в выписках. Свяжитесь с нами, если вы все еще не получили возмещение через 5 рабочих дней.
Не возвращайте товар в наш офис в Нью-Йорке. Для любого обмена или возмещения, пожалуйста, сначала напишите нам по адресу [email protected], чтобы мы предоставили вам шаги, которые необходимо выполнить. Любой продукт, который вы возвращаете, должен быть в том же состоянии, в котором вы его получили, и должен быть возвращен в оригинальной упаковке без использования. Пожалуйста, сохраните оригинал квитанции.
Подробнее о политике возврата и замены.
Стоимость доставки
| Регион/страна | Состояние | Почтовый индекс | Стоимость |
|---|---|---|---|
| США (США) | Любой | Любой | Бесплатная доставка |
| Везде | Любой | Любой | Бесплатная доставка |
После отправки вопроса в ваше электронное письмо будет автоматически включена ссылка на продукт.
Пока нет вопросов. Будьте первым, кто задаст вопрос об этом товаре.