Содержание
Белка в колесе: Мотор-колесо
Двенадцать лет назад в лабораториях компании Michelin началось создание экологически чистого электрического колеса будущего, вмещающего в себя весь автомобиль, не считая кузова и сидений: двигатель, трансмиссию, подвеску, рулевое управление и тормозную систему
Владимир Санников
Item 1 of 2
1 / 2
Авто с электрическими мотор-колесами обладают рядом веских преимуществ перед традиционными. В первую очередь это отсутствие множества сложных и тяжелых передаточных механизмов между двигателем и колесом — сцепления, трансмиссии, приводных валов и дифференциалов. Во-вторых, отменная динамика: компактные и легкие электрические моторы способны развивать крутящий момент вплоть до 700 Н•м даже на самых низких оборотах. В-третьих, управляемое мотор-колесо делает автомобиль чрезвычайно маневренным — ведь все колеса могут вращаться с разной скоростью и даже в разных направлениях. Машина способна разворачиваться на 360 градусов, парковаться в самых сложных условиях и мгновенно адаптироваться к качеству дорожного покрытия. В-четвертых, значительно упрощается конструкция важнейшей для электромобилей системы регенерации энергии торможения. Ну и в-пятых, ничто не сможет сравниться с мотор-колесом в обеспечении активной безопасности движения — все продвинутые электромеханические алгоритмы типа ABS, ESP, Traction Control, Brake Assist и так далее запросто прошиваются в управляющий софт и воздействуют на каждое отдельное колесо.
Машина способна разворачиваться на 360 градусов, парковаться в самых сложных условиях и мгновенно адаптироваться к качеству дорожного покрытия. В-четвертых, значительно упрощается конструкция важнейшей для электромобилей системы регенерации энергии торможения. Ну и в-пятых, ничто не сможет сравниться с мотор-колесом в обеспечении активной безопасности движения — все продвинутые электромеханические алгоритмы типа ABS, ESP, Traction Control, Brake Assist и так далее запросто прошиваются в управляющий софт и воздействуют на каждое отдельное колесо.
За перечисленные преимущества мотор-колесо расплачивается столь же существенными недостатками. Главный из них — масса механизмов, помещаемых внутрь обода. Высокооборотные электродвигатели мотор-колес нуждаются в понижающем редукторе. Он должен быть компактным и герметичным. Редуктор добавляет несколько килограммов к общей массе колеса. Для традиционных автомобилей лишний вес в конструкции трансмиссии не критичен. Но для колес действует совершенно другой принцип. Большая неподрессоренная масса, или, говоря проще, тяжелые колеса, резко снижает комфорт и управляемость, повышает износ подвески, передает на кузов вибрации. Оптимальный вес колеса для среднеразмерного автомобиля составляет от 10 до 30 кг без учета шины. Вписаться в эти жесткие рамки мотор-колесу очень непросто.
Большая неподрессоренная масса, или, говоря проще, тяжелые колеса, резко снижает комфорт и управляемость, повышает износ подвески, передает на кузов вибрации. Оптимальный вес колеса для среднеразмерного автомобиля составляет от 10 до 30 кг без учета шины. Вписаться в эти жесткие рамки мотор-колесу очень непросто.
Наконец, ремонт мотор-колеса представляет собой операцию, требующую высокой квалификации. Переобуться в обычной шиномонтажной мастерской у его владельца не получится. А если повреждение произойдет вдалеке от сервисного центра? Запасное мотор-колесо в багажнике? Вряд ли это возможно, ведь стоимость такой запаски отобьет всякое желание покупать электромобиль.
Электронная диета
Инженерам Michelin удалось побороть два главных недуга мотор-колес — размеры и вес. По словам Патрика Олива, руководителя подразделения компании по перспективным разработкам, масса мотор-колеса Active Wheel второго поколения в сборе, установленного на концепте Heuliez WILL, составляет 42, а неподрессоренная масса — 35 кг. Для сравнения — неподрессоренная масса переднего колеса хетчбэка Renault Clio равна 38 кг. Такого результата удалось добиться за счет предельной миниатюризации всех элементов конструкции — ведущего электродвигателя, одноступенчатого понижающего планетарного редуктора, электродвигателя управления подвеской и поворотом колес, пружин, тормозного механизма и системы жидкостного охлаждения. Достаточно сказать, что вес ведущего мотора в модификации системы для спорткара Venturi Volage составляет всего 7 кг при максимальной мощности 75 л.с. и крутящем моменте 58 Н•м, развиваемом в диапазоне от 0 до 8500 оборотов в минуту. Вся остальная механика внутри Active Wheel укладывается в 11 кг.
Для сравнения — неподрессоренная масса переднего колеса хетчбэка Renault Clio равна 38 кг. Такого результата удалось добиться за счет предельной миниатюризации всех элементов конструкции — ведущего электродвигателя, одноступенчатого понижающего планетарного редуктора, электродвигателя управления подвеской и поворотом колес, пружин, тормозного механизма и системы жидкостного охлаждения. Достаточно сказать, что вес ведущего мотора в модификации системы для спорткара Venturi Volage составляет всего 7 кг при максимальной мощности 75 л.с. и крутящем моменте 58 Н•м, развиваемом в диапазоне от 0 до 8500 оборотов в минуту. Вся остальная механика внутри Active Wheel укладывается в 11 кг.
Основа Active Wheel — легкая алюминиевая рама, которая простым жестким рычагом соединена с подрамником кузова. Соединение сделано подвижным, чтобы колесо могло поворачиваться. К внутренней поверхности рамы крепятся все элементы Active Wheel, а сам обод закрепляется на плоской дискообразной ступице. Тормозной механизм состоит из вращающегося диска и суппортов с электромагнитными актуаторами. Ведущий электродвигатель во время торможения работает в режиме генератора, вырабатывая электроэнергию для питания бортового аккумулятора. Подвеска состоит из стальной пружины и электрических амортизаторов. Моторчик, управляющий амортизаторами, отвечает также за поворот колеса. Благодаря большому углу поворота электромобиль значительно маневреннее обычных авто.
Тормозной механизм состоит из вращающегося диска и суппортов с электромагнитными актуаторами. Ведущий электродвигатель во время торможения работает в режиме генератора, вырабатывая электроэнергию для питания бортового аккумулятора. Подвеска состоит из стальной пружины и электрических амортизаторов. Моторчик, управляющий амортизаторами, отвечает также за поворот колеса. Благодаря большому углу поворота электромобиль значительно маневреннее обычных авто.
Сложным хозяйством Active Wheel управляет продвинутая электроника. По словам инженеров Michelin, время отклика электрической подвески составляет всего 0,003 с. Это на порядок быстрее реакции стандартного гидравлического амортизатора. Подвеска, характер которой может изменяться за тысячные доли секунды, позволяет больше не искать компромисс между плавностью хода и управляемостью. Более того, простым переключением кнопки на сенсорном дисплее приборной панели можно выбрать один из нескольких режимов жесткости подвески и остроты рулевого управления. Уникальная технология Michelin позволяет настраивать повадки автомобиля под настроение водителя. Хочется поджечь покрышки на скоростной трассе — пожалуйста, желаете медленно и комфортно прокатиться по тесным улочкам — нет проблем.
Уникальная технология Michelin позволяет настраивать повадки автомобиля под настроение водителя. Хочется поджечь покрышки на скоростной трассе — пожалуйста, желаете медленно и комфортно прокатиться по тесным улочкам — нет проблем.
Обслуживание, ремонт и замена покрышек на колесах Active Wheel, по уверениям инженеров Michelin, не составит большой проблемы для владельцев. Обод колеса вместе с покрышкой сделан съемным. Не совсем ясно, насколько система Active Wheel будет устойчива к воздействию низких температур, грязи и влаги. Но думается, что разработчики колес для лунного внедорожника не могли упустить из виду такие важные моменты эксплуатации. Вероятно, ко времени появления серийных машин компания создаст специальную оснастку для автосервисов и шиномонтажного оборудования. По словам руководства Michelin, ждать осталось недолго. Серийное производство мотор-колес начнется в 2010 году в Китае. Там же будут собирать пакеты литий-ионных элементов для электромобилей с технологией Active Wheel.
Аэродинамика минус металлолом
Появление на Парижском автосалоне новейшего концепта небольшой экзотической автокомпании из Монако не случайно. Вот уже семь лет, с тех пор как у Venturi появился новый хозяин, Гильдо Пастор, компания удивляет публику невероятными разработками. Кредо Venturi — экологически чистый электропривод и эпатажный дизайн, автором которого является знаменитый французский дизайнер со славой бунтаря и хулигана Саша Лакич. Первой его работой стал родстер Venturi Fetish, показанный в Париже в 2002 году. Затем были созданы фантастический Astrolab, не похожий ни на что первый в мире автономный электромобиль Eclectic, использующий энергию солнца и ветра, и, наконец, Volage. Лучшего способа продемонстрировать уникальные качества Active Wheel, чем оснастить чудо-колесами Volage, было не придумать. Хайтек на грани реальности — вот что получилось в итоге.
Venturi Volage — это двухместный родстер снаряженной массой 1075 кг, созданный на модернизированном шасси концепта Fetish. Основа кузова — очень легкая и жесткая платформа из полых алюминиевых панелей с сотовой структурой, облицованных с двух сторон карбоновым волокном. Для крепления мотор-колес спереди и сзади на платформе установлены жесткие подрамники из авиационной стали. Передний подрамник выполняет еще одну важную функцию — формирует переднюю сминаемую зону безопасности. На заднем помещается литий-полимерный аккумулятор французской компании Zebra. Кузовные панели отформованы из многослойного карбонового листа. По словам создателя Volage Саши Лакича, дизайн родстера продиктован законами аэродинамики и вычитанием лишнего — ненужного двигателя, трансмиссии, подвески и еще целой кучи металлолома.
Основа кузова — очень легкая и жесткая платформа из полых алюминиевых панелей с сотовой структурой, облицованных с двух сторон карбоновым волокном. Для крепления мотор-колес спереди и сзади на платформе установлены жесткие подрамники из авиационной стали. Передний подрамник выполняет еще одну важную функцию — формирует переднюю сминаемую зону безопасности. На заднем помещается литий-полимерный аккумулятор французской компании Zebra. Кузовные панели отформованы из многослойного карбонового листа. По словам создателя Volage Саши Лакича, дизайн родстера продиктован законами аэродинамики и вычитанием лишнего — ненужного двигателя, трансмиссии, подвески и еще целой кучи металлолома.
Развесовка автомобиля идеальна — 45% массы на передней оси и 55% — на задней. Для полноприводного автомобиля с четырьмя ведущими и управляемыми колесами это очень важно. Мощность каждого мотор-колеса составляет 75 лошадок. Итого 300! До сотни с места эта бесшумная ракета разгоняется всего за 4,9 с и развивает максималку 150 км/ч. Умная электроника чутко прислушивается к работе моторов, подвески и мгновенно корректирует малейшие отклонения от курса, заставляя каждое колесо вращаться со своей скоростью. Щербатую мостовую Volage преодолевает так, что седоки могут спокойно наслаждаться горячим кофе.
Умная электроника чутко прислушивается к работе моторов, подвески и мгновенно корректирует малейшие отклонения от курса, заставляя каждое колесо вращаться со своей скоростью. Щербатую мостовую Volage преодолевает так, что седоки могут спокойно наслаждаться горячим кофе.
На подходе к прилавку
Через три года в продаже появятся первые экземпляры Volage ручной сборки. Venturi оценивает обладание фантастическим электромобилем в ?300 000. Автолюбители поскромнее уже в следующем году смогут приобрести серийный суперкомпакт Heuliez WILL с передними мотор-колесами Michelin Active Wheel суммарной мощностью 81 л.с. и запасом хода на одной зарядке литий-полимерной батареи от 150 до 400 км. Стоимость автомобиля составит ?20 000. В качестве бонуса Heuliez предоставит клиентам широкополосный мобильный интернет-доступ прямо в салон и кучу полезных online-сервисов от корпорации Orange.
Как починить мотор-колесо? Замена повреждённого кабеля двигателя
Привет друзья!
Довольно часто кабель двигателя мотор-колеса на выходе из оси не имеет необходимой защиты, и в результате падения велосипеда происходит его повреждение. В некоторых случаях эти повреждения несущественные, и двигатель продолжает работать как раньше.
В некоторых случаях эти повреждения несущественные, и двигатель продолжает работать как раньше.
Но иногда происходит повреждение проводов, которое может повлечь за собой выход из строя не только двигателя, но и контроллера. Если один из фазных проводов замкнётся с сигнальным проводом, могут выйти из строя датчики Холла в двигателе и пятивольтовая цепь в контроллере.
Сегодня рассмотрим случай, когда повреждён силовой провод — половина его жил оказались разорванными. И хотя теоретически система могла продолжить работу в таком виде, со временем оборванные жилы могут замкнуться с соседними проводами.
По двум параллельным красным линиям, которые я добавил на фото, видно, как вследствие удара загнулась левая стенка оси в месте выхода провода. Её после извлечения старого провода просто отогнём обратно.
Двигатель неизвестного производителя, рассчитан на номинальное напряжение 48 вольт и, как выяснилось, имеет 2-ступенчатый редуктор. Для начала снимаем его с велосипеда.
Для начала снимаем его с велосипеда.
Откручиваем винты, снимаем крышку и вынимаем двигатель из корпуса. Затем откручиваем 6 длинных винтов, чтобы получить доступ к обмоткам. Фото этого процесса, к сожалению, сделать не удалось. При случае обязательно покажу в одной из будущих статей.
Откручиваем 6 винтов крепления полуоси и 2 винта крепления платы с датчиками. Все винты посажены на фиксатор резьбы, так что при их выкручивании нужно использовать качественный инструмент и быть предельно внимательным, чтобы не сорвать шлицы винтов.
Отмечаем положение платы (я обычно ещё и фотографирую), чтобы при сборке установить её в исходное положение. Это необходимо для правильной работы двигателя, так как при смещении платы происходит смещение датчиков Холла относительно обмоток двигателя.
Извлекаем полуось и плату с датчиками.
Сняв крышку, мы получаем доступ к обмоткам двигателя. Как видим, места соединений, помимо стеклоармированных трубок, обёрнуты дополнительным изоляционным материалом.
Подрезаем обвязочную нить и стягиваем стеклоармированные трубки. Нагреваем паяльником соединение и одновременно раскручиваем его пассатижами. При разъединении провод может спружинить, поэтому предварительно надеваем очки для защиты глаз от возможных брызг припоя. Повторяем операцию для всех трёх проводов.
Силовые провода отпаяны, и теперь отпаиваем плату с датчиками Холла. Запоминаем положение проводов (фотографируем), выпаиваем провода, прочищаем отверстия и промываем плату.
Извлекаем старый кабель из полуоси двигателя и исправляем загнутый угол полуоси, про который я писал в начале статьи. Проверяем что гайка нормально накручивается.
Подготавливаем новый кабель, длины проводов делаем такими же. Если для извлечения старого кабеля пришлось откусить жёсткие концы силовых проводов, учитываем это при подготовке нового.
На новый кабель надеваем всё, что сняли со старого, в обратной последовательности. В нашем случае это только полуось, так как разъём достаточно тонкий чтобы пройти через гайку.
В нашем случае это только полуось, так как разъём достаточно тонкий чтобы пройти через гайку.
В случае более мощных двигателей, когда разъём толще, на новый кабель придётся сразу надеть весь необходимый набор в правильной последовательности — гайки, шайбы, торкармы. Иначе, если что-то забыли, всю работу придётся проделать заново.
Надеваем стеклоармированные трубки. Я предпочёл взять новые, но в принципе, можно оставить и старые, если они не пропитаны смолой и не слишком жёсткие, иначе их сложно будет укладывать.
Подпаиваем сигнальные провода платы датчиков, соблюдая их последовательность по сделанному ранее фотоснимку.
После пайки смываем с платы остатки флюса и переходим к силовым проводам.
Надеваем на силовые провода стеклоармированную трубку, вставляем через крышку внутреннего корпуса и подпаиваем к обмоткам, соблюдая цветовое расположение проводов.
Восстанавливаем обвязку капроновой нитью и пропитываем её эпоксидной смолой для лучшей фиксации.
Хотя в исходном варианте такого не было, я решил дополнительно наложить на обмотки стеклоармированную клейкую ленту, для защиты обмоток от соприкосновения с крышкой корпуса.
Загибаем ленту внутрь и надеваем крышку. Для того, чтобы винты не выкрутились от вибрации при эксплуатации двигателя, наносим на них разъёмный фиксатор резьбы.
Он достаточно сильный, чтобы предотвратить самопроизвольное выкручивание, и в тоже время не слишком крепкий, чтобы нельзя было разобрать мотор повторно в случае необходимости.
На этом работа почти завершена — осталось вернуть двигатель в корпус мотор-колеса и прикрутить крышку.
Для кого-то описанная работа окажется до невозможности простой, а кто-то просто не решится за неё взяться. В любом случае, нужно трезво оценивать свои возможности, включая инструменты и оборудование, но, в то же время, я бы посоветовал не бояться пробовать что-то новое, особенно если Вы уверены, что Ваши руки растут из нужного места.
Если же есть сомнения и желание сэкономить личное время, всегда можно обратиться в специализированную мастерскую. Например, в Самаре это Electronbikes.
На этом пока всё. До встречи в новых статьях!
08 ФЕВРАЛЯ 2020
Читать другие статьи
Евгений Бегин
Автор статьи
Ремонт мотор колеса гироскутера — цена в Москве, починить двигатель гироскутера в мастерской
Один из самых дорогих и важных элементов гироскутера – мотор-колесо. Электродвигатель приводит в движение ваш транспорт. Конструкция устройства подразумевает использование двух моторов, которые работают отдельно друг от друга. Достаточно редко оба мотор-колеса выходят из строя отдельно. Чаще поломка случается с одним из моторов.
Выход из строя двигателя распознать несложно. Гироскутер начинает вращаться вокруг своей оси вместо движения прямо, одно колесо никак не реагирует на ваши команды или работает со сбоями. Если вы столкнулись с такими неприятностями, потребуется ремонт электродвигателя гироскутера.
Почему ломаются моторы? Главные причины
- В устройство попала вода. Влага негативно влияет на электрические соединения, разрушает все внутренности вашего электротранспорта.
- Ресурс мотора исчерпан. Это случается при активной эксплуатации гироскутера в течение нескольких лет. Дешевые модели быстрее выходят из строя.
- Механические повреждения Moon. Удары, постоянная вибрация и прочие воздействия могут вывести из строя двигатель.
- Сгоревшие соединения. Это случается на бюджетных моделях, чаще всего подобные поломки устраняются с помощью мелкого ремонта.
Прайс лист с ценами на услуги мастерской
| Название услуги |
Примерное время
ремонта, мин
| Цена (руб) |
| Диагностика |
20
|
Бесплатно
|
| Мелкий ремонт | 15 | 450 |
| Замена bluetooth-платы | 15 | 450 |
| Замена светодиода | 20 | 600 |
| Замена центральной платы | 30 | 900 |
| Ремонт центральной платы на гироскутере | 40 | 2600 |
| Замена комплекта плат | 40 | 1200 |
| Замена боковой платы | 15 | 450 |
| Замена аккумулятора на гироскутере | 15 | 450 |
| Восстановление аккумуляторной батареи | 40 | 1200 |
| Протяжка аккумуляторной батареи | 15 | 800 |
| Замена габаритных огней | 15 | 450 |
| Замена гнезда зарядки на гироскутере | 25 | 750 |
| Замена датчика гироскопа | 20 | 600 |
| Зимняя аквазащита гироскутера | 90 | 3000 |
| Пайка проводки | 15 | 450 |
| Замена динамика | 20 | 600 |
| Замена каркаса | 60 | 1800 |
| Ремонт каркаса | 90 | 2700 |
| Ремонт электропроводки | 15 | 450 |
| Замена/установка камеры в мотор-колесе гироскутера 10 дюймов | 15 | 450 |
| Замена/установка камеры в мотор-колесе гироскутера 10,5 дюймов | 60 | 1800 |
| Чистка мотор-колес (пара) | 40 | 1200 |
| Накачка камеры (1шт) | 10 | 150 |
| Замена покрышки в мотор-колесе гироскутера 10 дюймов | 15 | 450 |
| Установка покрышки с камерой в мотор-колесе гироскутера 10,5 дюймов | 60 | 1800 |
| Регулировка клапанов чувствительности | 30 | 900 |
| Замена мотор колеса в сборе | 20 | 600 |
| Замена ротора в мотор-колесе | 40 | 1200 |
Указанная стоимость и время работы, указаны в ознакомительных целях. Конечная цена ремонта расчитывается индивидуально — в зависимости от сложности работ, наличия запчастей и других факторов. Вы можете прислать фотографию поломки нам на WhatsApp и мастер постарается расчитать стоимость ремонта удаленно.
Конечная цена ремонта расчитывается индивидуально — в зависимости от сложности работ, наличия запчастей и других факторов. Вы можете прислать фотографию поломки нам на WhatsApp и мастер постарается расчитать стоимость ремонта удаленно.
Калькулятор расчёта стоимости ремонта
Укажите бренд и модель
Кратко что сломалось?
Ремонт на дому или в мастерской?
Когда нужно выполнить ремонт?
Хотите расширенную гарантию?
Особые пожелания и вопросы мастеру
Ваше имя
Ваш телефон
Электронная почта
Как устранить поломки устройства?
Восстановление возможно только в условиях сервисного центра. Официальная мастерская использует новые оригинальные детали, покупает только комплектующие с гарантией. Поэтому после восстановления фирменные запчасти будут служить долго.
Чаще всего ремонт проводится с учетом таких стадий:
- специалист в мастерской выполняет диагностику и определяет причину поломки;
- корпус разбирается, производится визуальный осмотр всех внутренних деталей;
- если восстановление возможно, выполняется ремонт мотора гироскутера;
- при серьезной поломке выполняется замена оборудования на новые комплектующие;
- в процессе сборки корпус герметизируется, чтобы вы не столкнулись с новыми проблемами.


Отремонтировать устройство Cybex First GO самостоятельно можно, но после такого ремонта транспорт не порадует вас надежностью. В домашних условиях невозможно произвести герметизацию, защитить детали от воды и пыли. Лучше обратиться в мастерскую, тем более, стоимость починки невысокая.
Профилактика вашего гироскутера – защищаем от поломок
Чтобы дорогое устройство не сломалось в будущем, следует доверить обслуживание профессионалам. Один раз в сезон можно проводить защиту корпуса от влаги. Также в рамках профилактики выполняют смазку деталей вращения, осмотр внутренних деталей, просушку и прочие процедуры.
Сделаем срочный расчёт стоимости ремонта!
Также такой профилактический комплекс следует заказать при ремонте. В таком случае новые запчасти будут служить дольше, и вам не придется покупать новый гироскутер. Наша мастерская сотрудничает с сервисом по ремонту apple watch, вы можете получить 10% скидку назвав операторам промокод «гироборд 2020».
В этой категории нет товаров.
Мотор-колесо с редукторным двигателем и двигателем прямого привода
Главная /Мотор-колесо с редуктором или мотор-колесо прямого привода?
Электродвигатель, аккумуляторная батарея и система управления – то, что необходимо для превращения традиционного велосипеда в электровелосипед.
Современные электродвигатели типа мотор-колесо позволяют до предела упростить задачу перевода велосипеда на электротягу. Мотор колесо это и двигатель и трансмиссия в одном лице. Причем это очень надежная электрическая машина и трансмиссия, все узлы которой хорошо защищены от попадания пыли и воды. Этот тип двигателя как нельзя лучше приспособлен для создания транспортных средств. Электродвигатель управляется специальным контроллером.
Электродвигатель управляется специальным контроллером.
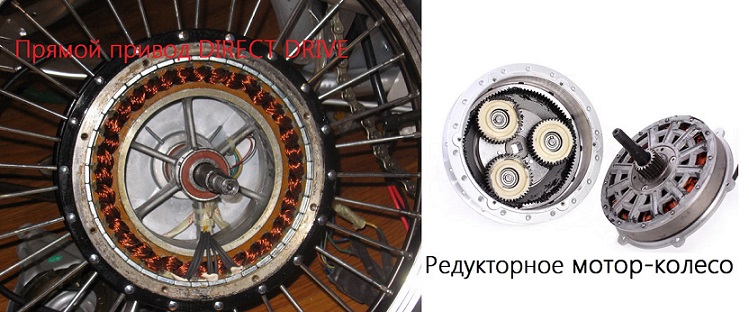
Электродвигатели мотор-колесо подразделяются на два класса:
- двигатели со встроенным редуктором в том числе с автоматическим переключением передаточного отношения редуктора.
- двигатели прямого привода;
У каждого двигателя есть уникальные свойства, которые могут оказаться подходящими для целей которые Вы ставите перед собой превращая свой велосипед в современный электровелосипед. Чем же принципиально различаются эти два класса двигателей мотор-колес?
Давайте разберемся.
| Параметры | мотор колесо с редуктором | мотор колесо прямого привода |
| Общий вид мотор колеса | ||
| Мощность | питание (36– 48) В мощность (180-500) Вт | питание 36 В — ( 500-750) Вт питание 48 В — (750-1000) Вт |
| Вес двигателя | 3 — 5 кг | 6- 9кг |
| Диаметр двигателя | ~132 мм | ~243 мм |
| Вращающий момент при мощности 350 Вт | 18 N/м | 11 N/м |
| Максимальна скорость | при питании 36 В — 32 км/час | при питании 36 В — 32 км/час при питании 48 В — 45 км/час |
| Пробег на зарядке при разной емкости аккумуляторов | 36 В 10 A/час = 30-50 км | 36 В 10 A/час = 19-38 км |
| Сопротивление вращению при выключенном двигателе | отсутствует | присутствует |
| Нагрузочные характеристики двигателей | ||
| Резюме: | Преимущества: — малый вес; — малые габариты; — экономичность; — большой пробег на зарядке аккумулятора; — большой вращающий момент; — нет сопротивления вращению колеса; — велосипед остается велосипедом.  | Преимущества: — большой межремонтный период; — большая скорость велосипеда; — велосипед становится скутером |
Стоит сравнить нагрузочные характеристики двигателей при одинаковой скорости вращения. Мотор колесо велосипеда с 26 дюймовым колесом, при скорости в 20 км/час делает 160 об/мин (см. Таблицу).
Анализируя нагрузочные характеристики двигателей можно видеть, что двигатель прямого привода при скорости 160 об/мин развивает вращающий момент 6,5N/м, а редукторный двигатель 10,5N/м. Это на 38% больше чем у двигателя прямого привода. В тоже время вращающий момент в 10,5N/м двигатель прямого привода развивает при потребляемом от аккумулятора токе 11,5А, а редукторный двигатель развивает тот же вращающий момент в 10,5N/м при потребляемом токе всего 8А. Получается, что редукторный двигатель на 30% экономнее расходует энергию аккумулятора. Следовательно, и пробег на скорости 20 км/час будет больше у велосипеда с редукторным двигателем. Для большинства задач самое важное условие — обеспечить наибольший пробег на одной зарядке аккумулятора. С этой задачей редукторный двигатель справляется на 30-35% успешнее, чем двигатель прямого привода.
С этой задачей редукторный двигатель справляется на 30-35% успешнее, чем двигатель прямого привода.
Редукторный двигатель имеет еще одно неоспоримое преимущество перед двигателем прямого привода — хорошую тягу на низких оборотах, что очень важно для движения по грунтовым дорогам и бездорожья, где двигаться на сакорости более 30 км/час просто невозможно по соображениям безопасности.
Cкорость вращения колес разного диаметра при скорости велосипеда 20 км/час
| 16’’l | 20’’ | 24’’ | 26’’ | 700C/28’’ |
| 260 об/мин 20 км/час | 208 об/мин 20 км/час | 174 об/мин 20 км/час | 160 об/мин 20 км/час | 149 об/мин 20 км/час |
Из всего сказанного можно сделать следующие выводы:
1. Мотор-колесо на базе редукторного двигателя лучший выбор, если для Вас важны следующие аспекты:
- обеспечить максимальный пробег электровелосипеда на одной заядке аккумулятора;
- обеспечить минимальный вес электровелосипеда;
- обеспечить хороший накат велосипеда с отключенным двигателем;
- обеспечить хорошую тягу двигателя;
- обеспечить максимальную скорость 40-45 км/час.

2. Мотор-колесо на базе двигателя прямого привода лучший выбор, если для Вас важно:
- обеспечить максимальную скорость более 45-50 км/час;
Двигатель-колесо Шкондина. Мотор-колесо Шкондина
Производство транспортных средств и оборудования Производство электрического оборудования Производство электродвигателей, генераторов и трансформаторов Прорывные технологии Транспортные технологии
Двигатель-колесо Шкондина. Мотор-колесо Шкондина.
Мотор-колесо Шкондина, проще говоря, двигатель-колесо Шкондина или двигатель Шкондина, – принципиально новый электродвигатель с уникальными характеристиками. Уникальность двигателя Шкондина в его простоте. Двигатель-колесо Шкондина состоит всего из пяти деталей в отличии от обычных электромоторов, собранных из 10-20 узлов, что влияет на его себестоимость. Создав для этих деталей точные матрицы, можно штамповать двигатели Шкондина миллионами.
Двигатель-колесо Шкондина. Мотор-колесо Шкондина
Мотор-колесо Шкондина
Устройство двигателя Шкондина (конструкция, схема и принцип работы)
Преимущества мотор-колеса Шкондина
Применение двигателя Шкондина
Двигатель-колесо Шкондина. Мотор-колесо Шкондина:
Мотор-колесо Шкондина, проще говоря, двигатель-колесо Шкондина или двигатель Шкондина, – принципиально новый электродвигатель с уникальными характеристиками.
Ниже на рисунке приведен один из вариантов двигателя Шкондина.
Рис. 1. Внешний и внутренний вид колеса Шкондина
Уникальность двигателя Шкондина в его простоте. Двигатель-колесо Шкондина состоит всего из пяти деталей в отличии от обычных электромоторов, собранных из 10-20 узлов, что влияет на его себестоимость. Создав для этих деталей точные матрицы, можно штамповать двигатели Шкондина миллионами.
Двигатель-колесо Шкондина – это совокупность магнитных дорожек, динамически меняющих свои параметры за счет переключение обмоток электромагнитов в нужное время и в нужном месте. При этом обмотки электромагнитов нельзя соединять ни звездой, ни треугольником.
При этом обмотки электромагнитов нельзя соединять ни звездой, ни треугольником.
Двигатель-колесо Шкондина – это устройство, которое с высоким КПД использует взаимодействие магнитных полей, параметры которых умело меняются как за счет правильного соотношения между парным числом магнитных полюсов на статоре и числом пар полюсов электромагнитов на роторе, число пар магнитов на статоре больше числа пар полюсов электромагнитов на роторе, правильно сконструированного коллектора или устройства синхронизации в бесколлекторном варианте.
Двигатель-колесо Шкондина обладает при той же массе и подаваемого на обмотки ротора тока гораздо большей мощностью, чем электромотор стандартной конструкции.
Двигателю Шкондина конструктивно можно придать любую форму, как в виде колеса (блина), так и в виде цилиндра, наподобие той формы, которую придают существующим двигателям постоянного тока.
Устройство двигателя Шкондина (конструкция, схема и принцип работы):
На рисунке выше представлен один из вариантов двигателя Шкондина.
Двигатель-колесо Шкондина – мотор-колесо Шкондина состоит из статора (внутри) и ротора (снаружи). На статоре через равные промежутки установлено 11 пар магнитов, полюса магнитов чередуются. Всего полюсов 22. На роторе установлены 6 U-образных электромагнитов, у которых, получается, имеется 12 полюсов. На роторе установлены щетки, с помощью которых подается питание на электромагниты, а на статоре установлен коллектор, с которого электрический ток поступает на щетки.
Расстояние между полюсами любого электромагнита ротора равно расстоянию между соседними магнитами на статоре. А это означает, что в момент точного «соприкосновения» полюсов одного из электромагнитов с соседними полюсами магнитов на статоре, полюса остальных электромагнитов с полюсами магнитов на статоре не «соприкасаются».
Сдвиг полюсов электромагнитов на роторе и полюсов магнитов на статоре относительно друг друга создает между ними градиент напряженности магнитного поля, а последний как раз и является источником крутящего момента. Для варианта двигателя Шкондина, изображенного на рисунке получается, что в каждый момент времени крутящий момент создают 5 электромагнитов из 6. Тот электромагнит, полюса которого точно «соприкасаются» с полюсами магнитов на статоре, крутящего момента не создаёт. Получаем своеобразный силовой КПД в 83%. И это при отсутствии противоЭДС. А если считать КПД по доле участвующих в создании тяги магнитов на статоре, то получаем, что из 22 магнитов тягу создают 20 магнитов, т.е. 91%.
Для варианта двигателя Шкондина, изображенного на рисунке получается, что в каждый момент времени крутящий момент создают 5 электромагнитов из 6. Тот электромагнит, полюса которого точно «соприкасаются» с полюсами магнитов на статоре, крутящего момента не создаёт. Получаем своеобразный силовой КПД в 83%. И это при отсутствии противоЭДС. А если считать КПД по доле участвующих в создании тяги магнитов на статоре, то получаем, что из 22 магнитов тягу создают 20 магнитов, т.е. 91%.
Коллектор двигателя Шкондина устроен так, что он в нужное время переключает направление тока в обмотках электромагнитов, что обеспечивает тягу только в одну сторону. Можно даже утверждать, что в данном моторе Шкондина работают сразу 6 классических электромоторов. Мотор действительно работает мотором, а не маховиком. В данном моторе на «полную катушку» используется не только мощность электромагнитного поля, но и коллекторно-щеточный механизм. И при этом двигатель устроен удивительно просто.
Преимущества мотор-колеса Шкондина:
– высокий КПД, у последних моделей – 94%,
– простота,
– низкая себестоимость,
– вес втрое меньше по сравнению с электродвигателями той же мощности,
– прочность, надёжность, длительный срок службы,
– экономия энергии на 50% и более,
– скорость в разы больше аналогичных по мощности электродвигателей.
Применение двигателя Шкондина:
– военная техника разного назначения,
– автомобили, велосипеды, автобусы, грузовая и спецтехника,
– вертолеты.
Примечание: описание технологии на примере мотор-колеса Шкондина.
магнитный линейный вечный двигатель с самозапиткой электровелосипед велосипед нашего изобретателя шкондина чертежи принцип работы схема
шкондин ооо мотор колесо шкондина купить цена готовый комплект для велосипеда автомобиля своими руками его конструкция и электросхема официальный сайт видео в украине в москве
принцип конструкция двигателя мотор колеса шкондина мнения отзывы
Коэффициент востребованности
5 446
Колесный мотор — frwiki.
 wiki
wiki
Мотор колеса представляет собой узел , который содержит двигатель , включенный в колесе , которая способна метательный транспортное средство. Основным преимуществом такой системы является ее небольшой размер и то, что она не требует передачи.
Резюме
- 1 рассказ
- 2 Мото Мегола
- 3 Лунный вездеход
- 4 троллейбуса Cristalis
- 5 Гидро-Квебекский колесный мотор
- 6 Активное колесо
- 7 Копенгагенское колесо
- 8 ez-Wheel
- 9 Примечания и ссылки
- 10 См. Также
- 10.1 Статьи по теме
- 10.2 Внешние ссылки
История
Мотор колеса концепция используется с начала XX — го века , в том числе электрического колеса двигателя 1899 Фердинанда Порше на Lohner-Porsche, двигатель мотоцикла Megola, гидравлические двигатели на строительной технике или тяжелой обработку (Poclain) и т. д.
д.
Вот несколько примеров, связанных с этой концепцией колесного двигателя:
Мегола Мотоцикл
Megola оригинальный немецкий мотоцикл, с пяти- цилиндра звезда роторный двигатель вращается в переднем колесе. Он был построен между 1921 и 1925 годами в количестве 2000 экземпляров немецкой компанией Deutsche-Megola-Werke GmbH в Мюнхене.
Юджин А. Сернан за рулем лунохода в миссии « Аполлон-17 » .
Лунный ровер
Лунный Ровер с четырьмя ведущими колесами был построен для покорение Луны : каждое колесо приводится в действие электрическим двигателем, развивая мощность 0,25 л.с. (0,2 кВт ) , связанный с редуктора « гармонической .» Тип привода » соотношение 1 / 80 . Узел герметичен и заполнен азотом для борьбы с нагревом в космическом вакууме.
Cristalis троллейбус
Irisbus Cristalis является троллейбус доступен в двух версиях 12 и 18 метров , называемых ETB 12 и ETB 18 . Трудность установки 80 кВт тягового двигателя в ступице части колеса сделали необходимым разработать ультра-компактный ход двигателя при очень высокой скорости ( 9000 оборотов в минуту ), охлаждаемой водой. Это асинхронный трехфазный двигатель, выбранный за отличное соотношение веса и мощности. Этот двигатель соединен с редуктором, на котором закреплен обод. Чтобы сделать сборку максимально компактной, Michelin разработала шину двойной ширины, которая может заменить обычные сдвоенные шины. В масляной ванне тормоз завершает набор. Шум редуктора, вращающегося на высокой скорости, является основным источником шума Cristalis.
Колесный мотор Hydro-Quebec
Tata Indica EV, оснащенный двигателем Electric TM4 от Hydro-Quebec.
Колесный двигатель Hydro-Québec был создан в 1994 году командой физика Пьера Кутюра . Он был направлен на замену двигателя внутреннего сгорания , используемого в подавляющем большинстве автомобилей, четырьмя электродвигателями, расположенными в колесах автомобиля и питаемыми от аккумуляторной батареи. Последний может восстанавливать энергию торможения транспортного средства (если он предназначен для этого), но также может заряжаться от бытовой электросети.
Столкнувшись с отсутствием прочных связей с мировыми производителями автомобилей, компания решает отказаться от проекта или даже продать его.
Десять лет спустя новая группа представила новый двигатель, Electric TM4 , с учетом первоначальной работы команды Couture, но который не был колесным.
Активное колесо
Система Active Wheel , разработанная Michelin , представляет собой набор функций, интегрированных в колесо, и включает в себя, помимо обычных функций, электрический тяговый двигатель, двигатель и электрическую систему активной подвески, которая позволяет изменять высоту. кузова на длинных гонках, а также для наклона кузова в поворотах для улучшения устойчивости на дороге и тормозной системы с принудительной вентиляцией. Active Wheel пытается ограничить неподрессоренную массу, и , следовательно , инерцию колеса, по сравнению с обычным колесом двигателя и, следовательно, чтобы сохранить сцепление с дорогой, который до сих пор был слабым местом колеса. Концепция колеса двигателя .
кузова на длинных гонках, а также для наклона кузова в поворотах для улучшения устойчивости на дороге и тормозной системы с принудительной вентиляцией. Active Wheel пытается ограничить неподрессоренную массу, и , следовательно , инерцию колеса, по сравнению с обычным колесом двигателя и, следовательно, чтобы сохранить сцепление с дорогой, который до сих пор был слабым местом колеса. Концепция колеса двигателя .
Active Wheel был представлен на Michelin HY-Light технологического демонстратора , энергия которых источник является водород топливного элемента , а также на Venturi Volage и Will D ‘ Heuliez , которые запланированы на батареи (Opel) литий-ионной или литий-полимере до 2012 года. Следует отметить, что это устройство отличается от мотор-колеса Hydro-Quebec, которое было без передаточных чисел (гораздо более крупный и тяжелый двигатель) и только с гарантированными функциями тяги и торможения (с частичной рекуперацией энергии торможения), но с немалую неподрессоренную массу, которая ухудшает курсовую устойчивость.
Недостатками шестеренчатого двигателя являются повышенная механическая сложность, которая увеличивает затраты на изготовление и ремонт, и более высокую скорость вращения компонентов, которая имеет тенденцию к снижению эффективности и надежности сборки.
Копенгагенское колесо
Копенгагенское колесо, разработанное в 2008 году и доступное с 2009 года на COP15 , является партнерством Массачусетского технологического института (MIT), муниципалитета Копенгагена , Ducati Energia (en) и Министерства окружающей среды Италии. восстановить энергию от торможения и возврата через двигатель в качестве движущей силы. Он превращает простой велосипед в электрический велосипед .
ez-Wheel
Ez-Wheel, разработанный в 2009 году одноименной компанией, также является энергонезависимым электрическим колесным двигателем. Ступица колеса объединяет все компоненты электрической тяговой цепи, то есть тяговый двигатель, аккумуляторную батарею, а также электронику управления двигателем и батареей. Основное преимущество этого процесса заключается в том, что он позволяет исключить из транспортного средства все остальные компоненты, включая проводку, что значительно облегчает интеграцию электродвигателя по сравнению с традиционными решениями. Эта концепция предназначена для легких мобильных приложений с пиковой мощностью двигателя порядка одного киловатта при скорости вращения от 100 до 200 об / мин . Первые приложения, представленные с помощью ez-Wheel, — это скутер, тачка, инвалидная коляска, тележка, велосипед и самокат для доставки.
Основное преимущество этого процесса заключается в том, что он позволяет исключить из транспортного средства все остальные компоненты, включая проводку, что значительно облегчает интеграцию электродвигателя по сравнению с традиционными решениями. Эта концепция предназначена для легких мобильных приложений с пиковой мощностью двигателя порядка одного киловатта при скорости вращения от 100 до 200 об / мин . Первые приложения, представленные с помощью ez-Wheel, — это скутер, тачка, инвалидная коляска, тележка, велосипед и самокат для доставки.
Ez-Wheel работает в сотрудничестве с группой Saft SA (батареи) и группой Leroy-Somer (моторы).
Примечания и ссылки
- ↑ Николя Менье, Следующие электромобили будут иметь моторы в колесах , Вызовы , 24 октября 2013 г.
- ↑ Ален Morin, Lohner Porsche гибрид 111 лет … , Руководство автомобилей 1 — го мая 2010.
- ↑ Жиль Прово и Паскаль Желинас, « Электромобиль Hydro » , на Discovery , Télévision de Radio-Canada ,
(по состоянию на 30 марта 2009 г. ) . - ↑ copenhagenwheel на jamesdysonaward сайте .
- ↑ copenhagenwheel на сайте MIT .
Смотрите также
Статьи по Теме
- Колесный мотор Hydro-Quebec
- Активное колесо
Внешние ссылки
- « Противоречие между гидроэнергетикой и Квебеком » ( Архив • Wikiwix • Archive.is • Google • Что делать? )
- Мотор-колесо параллельно квазитурбине
- ez-Wheel изобретает колесо заново
- « Первое самодостаточное энергетическое колесо » ( Архив • Wikiwix • Archive.is • Google • Что делать? )
<img src=»//fr.wikipedia.org/wiki/Special:CentralAutoLogin/start?type=1×1″ alt=»» title=»»>
Система внутриколесного двигателя.
 Система внутриколесного двигателя — это разновидность электромобиля… | by WAVE OF IMAGINATION
Система внутриколесного двигателя — это разновидность электромобиля… | by WAVE OF IMAGINATION
Система привода в колесе — это тип системы привода EV (электромобиля). Электродвигатели напрямую подключены к колесу, в то время как обычные электромобили имеют конструкцию, а бензиновый двигатель заменен электродвигателем.
Что такое мотор-колесо?
Основной принцип работы автомобиля, оснащенного электродвигателем в колесе, прост. Двигатель внутреннего сгорания, обычно находящийся под капотом, просто не нужен, его заменяют как минимум двумя двигателями, расположенными в ступицах колес автомобиля, эти колеса содержат не только тормозные компоненты, но и все функции, которые раньше выполнялись двигатель, трансмиссия, сцепление, подвеска и другие сопутствующие детали.
Несмотря на то, что концепция относительно проста в теории, моторы могут вызвать ряд вопросов относительно рабочих характеристик и эффективности.
В последние годы мы наблюдаем, как некоторые разработчики транспортных средств переходят к конфигурации трансмиссии, в которой двигатель устанавливается внутри колеса, что представляет собой систему внутриколесного двигателя. Мы должны признать, что когда электродвигатели интегрированы в колеса, открывается впечатляющий объем нового пространства, и, конечно, эти так называемые мотор-колеса или внутриколесные двигатели имеют определенные преимущества, но они также создают некоторые проблемы.
Мы должны признать, что когда электродвигатели интегрированы в колеса, открывается впечатляющий объем нового пространства, и, конечно, эти так называемые мотор-колеса или внутриколесные двигатели имеют определенные преимущества, но они также создают некоторые проблемы.
Электродвигатели в колесах не новы, в начале 20-го века Фердинанд Порше в первом гибридном автомобиле использовал электродвигатели, установленные на ступицах, в каждом колесе. Эти двигатели приводят колесо непосредственно в колесо, нет необходимости в редукторе или приводном валу. При использовании редуктора скорость снижается, а крутящий момент увеличивается. Но с полноприводным двигателем снижения нет. В этой системе скорость вращения колеса равна скорости двигателя, поэтому требуемый крутящий момент и мощность должны передаваться в режиме прямого привода.
Мотор-колеса подвергаются прямому воздействию пыли, соленой воды и других дорожных жидкостей, а также вибраций и ударов, что сокращает срок их службы.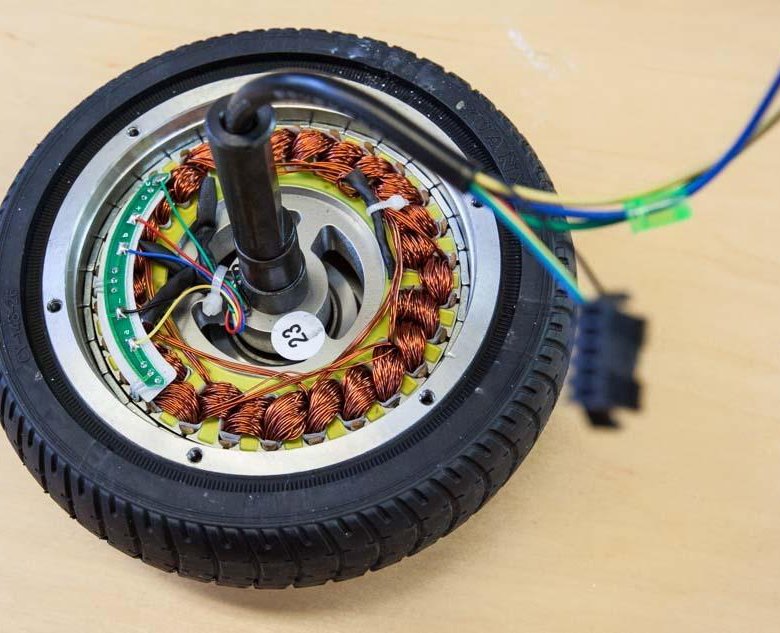 Это одна из основных причин, по которой Ford в конце концов решил отказаться от концепций внутриколесных двигателей, над которыми они работали, для нового электрического F-150 в 2008 году.
Это одна из основных причин, по которой Ford в конце концов решил отказаться от концепций внутриколесных двигателей, над которыми они работали, для нового электрического F-150 в 2008 году.
Четыре полноприводных двигателя, также известных как Quad-Motor Drive. Эти четыре двигателя обеспечивают мгновенную мощность и независимо регулируют крутящий момент на каждом колесе для точного управления в любых условиях, а управление мощностью на индивидуальном уровне двигателей обеспечивает векторизацию крутящего момента.
Что такое векторизация крутящего момента?
По сути, векторизация крутящего момента — это технология, которая распределяет мощность двигателя между левой и правой сторонами автомобиля. При распределении крутящего момента одна сторона колеса на оси может вращаться быстрее или медленнее, чем другая.
Управление вектором крутящего момента направлено на улучшение реакции рулевого управления и управляемости за счет распределения крутящего момента между колесами автомобиля.
Чем In-Wheel Motor EV отличается от других автомобилей?
Для автомобилей с традиционным двигателем внутреннего сгорания система трансмиссии состоит из обычной механической системы, такой как двигатель, трансмиссия, выхлоп, приводной вал, дифференциал.
В обычном электромобиле двигатель заменен электродвигателем с инвертором и комплектом аккумуляторов, установленных сзади или в основании автомобиля.
В случае электромобилей, использующих внутриколесные двигатели, все механические подсистемы трансмиссии исключаются и заменяются прямым приводом, а двигатели не нуждаются в карданном валу, поскольку они соединены непосредственно с колесами.
О дизайне
Производство транспортного средства, в котором используются электродвигатели, установленные в колеса, — это процесс, который намного сложнее, чем просто вырвать двигатель, а затем втиснуть электродвигатели в неиспользуемое пространство внутри колеса. Этот тип электродвигателя предназначен для работы на гибридных транспортных средствах, чтобы повысить эффективность транспортных средств с полным аккумуляторным питанием и даже электромобилей на топливных элементах.
Количество энергии, генерируемой этими внутриколесными двигателями, может варьироваться в зависимости от производителя и размера используемого двигателя. Электродвигатель устанавливается внутри колеса и передает мощность на колеса напрямую, без какой-либо трансмиссии.
Идея установки двигателя внутри обода колеса электромобиля является правильным выбором, так как можно гарантировать, что полная выходная мощность двигателя доступна на колесе без каких-либо механических потерь в трансмиссии.
Обеспечивают ли эти внутриколесные электродвигатели достаточный крутящий момент для любого применения?
Крутящий момент играет важную роль в времени отклика любого автомобиля и его производительности. Фактически, в автомобиле, оснащенном электродвигателями в колесах, большой крутящий момент доступен почти мгновенно.
Электродвигатели создают большой крутящий момент, и, поскольку эта сила передается непосредственно на колесо, каждое колесо может быть оснащено датчиками для определения требуемого крутящего момента в любой момент времени.
Эффективность мотора-колеса
Мотор-колеса всегда будет страдать от потерь при холостом ходе и при частичных потерях нагрузки. потому что двигатели не могут быть отделены от колес. Некоторые компании заявляют, что эффективность полноприводных двигателей выше из-за отсутствия коробки передач, хотя коробка передач всегда вносит некоторую неэффективность. Одно- или двухступенчатые коробки передач, которые обычно используются для электромобилей, намного эффективнее сложных многоступенчатых ступенчатые трансмиссии в трансмиссии двигателя внутреннего сгорания.
Эта потеря эффективности транспортного средства компенсируется тем, что из-за коробки передач. Электродвигатель может работать в своей наиболее эффективной рабочей зоне, что приводит к увеличению запаса хода транспортного средства по сравнению с системой прямого привода в зависимости от варианта использования и ездового цикла.
Рекуперативная мощность торможения
Некоторые модели внутриколесных двигателей также обеспечивают рекуперативное торможение, что означает, что система улавливает часть собственной кинетической энергии при торможении и отправляет ее обратно для зарядки аккумулятора.
Некоторые гибриды, такие как Toyota Prius и Tesla Roadster, уже используют эту технологию рекуперативного торможения, которая увеличивает запас хода автомобиля. Одним из самых больших преимуществ внутриколесных двигателей является тот факт, что мощность передается прямо от двигателя непосредственно на колесо, что сокращает расстояние, на которое проходит мощность, повышает эффективность двигателя. Например, в городских условиях двигатель внутреннего сгорания может работать только с КПД 20%, что означает, что большая часть его энергии теряется или тратится впустую из-за механических методов, используемых для передачи мощности на колеса, но в двигателе в колесе в том же говорят, что среда работает примерно при 90% эффективность.
Это будущее электромобилей?
Инженеры Porsche разработали систему управления крутящим моментом для четырехмоторной трансмиссии электромобиля, которая позволяет электрическим внедорожникам управляться со способностями спортивного автомобиля даже в самых сложных условиях. Из-за гораздо более быстрой реакции электродвигателя по сравнению с двигателем внутреннего сгорания система контроля тяги электромобиля может реагировать намного быстрее.
Из-за гораздо более быстрой реакции электродвигателя по сравнению с двигателем внутреннего сгорания система контроля тяги электромобиля может реагировать намного быстрее.
В электромобиле крутящий момент полностью контролируется электроникой, которая работает значительно быстрее, чем механические сцепления. Интеллектуальное программное обеспечение каждую миллисекунду распределяет усилия таким образом, чтобы автомобиль всегда вел себя нейтрально, но решение porsche — это не просто полный привод, а использование отдельных двигателей, управляющих каждым колесом автомобиля.
Наличие нескольких двигателей имеет свои преимущества и недостатки, большее количество двигателей увеличивает стоимость и сложность, но устраняет необходимость в приводном валу и обеспечивает больший контроль. Двигатели также могут увеличить неподрессоренную массу, что может негативно сказаться на управляемости и ходовых качествах.
Например. Становится возможным поворачивать колеса на 90 градусов и двигаться влево или вправо или даже вращаться на месте вместо того, чтобы просто двигаться вперед или назад. Это добавляет еще одно измерение к тому, как автомобиль может двигаться, и позволяет легко перемещаться в ограниченном пространстве.
Это добавляет еще одно измерение к тому, как автомобиль может двигаться, и позволяет легко перемещаться в ограниченном пространстве.
Новый rivian r1t имеет по одному двигателю на каждое колесо. Эта четырехмоторная трансмиссия позволяет грузовику rivian с легкостью управляться как спортивный седан на дороге и 4 на 4 на бездорожье, что, как сообщается, делает r1t самым быстрым грузовиком в мире.
Преимущества мотор-колес
Мотор-колеса просты в установке и замене, они добавляют гибкости, поскольку могут использоваться для привода заднего или переднего привода, а также полноприводных автомобилей без особых изменений в приводе. цепные имеют компактные размеры, так как весь двигатель находится внутри колеса. Внутриколесные двигатели обеспечивают высокий КПД за счет отсутствия механических потерь от трансмиссионного дифференциала и приводных валов, а также позволяют двигателю работать тише благодаря электронному управлению двигателем. Это означает, что такие функции, как ABS, контроль тяги и даже круиз-контроль, могут использоваться более эффективно.
Недостатки мотор-колес
Основной проблемой мотор-колес является проблема неподрессоренной массы, неподрессоренная масса – это масса всех компонентов, включая раму, двигатель, пассажиров и кузов, которые не поддерживаются рамой автомобиля. приостановка. Неподрессоренная масса включает в себя колеса, тормоза, и она перемещается вверх и вниз по любым неровностям и выбоинам, и она пытается следовать контурам дороги, а с мотор-колесами, являющимися частью неподрессоренной массы автомобиля, они будут воздействовать на каждую неровность выбоины и поворот на высокой скорости. .
Кроме того, они будут подвергаться воздействию дорожной грязи, грязи, пыли, воды и дорожной соли, что может сократить срок службы двигателей. Моторы в колесах дороже, чем одномоторное крепление на задней оси.
Словенская компания производит встраиваемые в колеса электродвигатели
Эрик С. Эвартс
Посмотреть галерею
Эрик С. Эвартс
Эвартс
Словенская компания Elaphe создала колесные электродвигатели, которые прошли испытания в самых неблагоприятных условиях зимы.
Одна из основных причин, по которой мы не видим серийных электромобилей с двигателями в колесах, заключается в том, что колесам приходится много терпеть, натыкаясь на разбитое дорожное покрытие, подъездные пути, иногда даже на бордюры, и врезаясь в выбоины. Электродвигатели в колесах не выдержали такого жестокого обращения.
Видео компании Elaphe показывает, как ее двигатели проходят испытания на покрытом льдом испытательном полигоне в Хэйхэ, Китай, предназначенном для проверки долговечности (и шума) автомобильных компонентов при сильных вибрациях.
ПРОВЕРКА: Protean запускает производство внутриколесного электродвигателя
Двигатели упакованы в виде полной ступицы колеса с дисковыми или барабанными тормозами, двигателем, подшипниками и всем, что может понадобиться автопроизводителю, чтобы прикрутить их к концу подвески.
Колесные двигатели могут помочь автопроизводителям воспользоваться одним из основных преимуществ электромобилей: они могут предложить много места внутри при относительно небольшой занимаемой площади. Им не нужен большой моторный отсек, достаточно места под полом для аккумуляторов. С двигателями в колесах им даже не нужно отдельное пространство в кузове автомобиля.
Без осей и коробок передач колесные двигатели также были бы более эффективными и увеличили запас хода электромобилей.
Электрический силовой агрегат Bosch
Другим преимуществом является то, что это упростило бы системы контроля тяги и устойчивости, поскольку инженеры могли бы напрямую контролировать крутящий момент или сопротивление на каждом колесе, а не контролировать мощность и торможение по отдельности, а иногда и увеличивать мощность централизованного двигателя, одновременно применяя тормоз в например, одно колесо, чтобы машина двигалась по снегу.
Крупные поставщики автомобилей также разрабатывают конкурирующие технологии, такие как электронная ось Bosch, которая объединяет двигатель, трансмиссию и блок управления мощностью на одной оси, которую можно встроить в существующую конструкцию автомобиля, например, для отдельной задней оси. полноприводного внедорожника.
полноприводного внедорожника.
Неясно, скоро ли колесные двигатели Elaphe превратятся в электромобиль или внедорожник, но видео показывает, что компания, возможно, находится на пути к решению одной из основных проблем с двигателями.
Метки:
Электромобили
Зеленый
Новости
Пожертвовать:
- Отправьте нам чаевые
- Связаться с редактором
Не все штаты Калифорнии с экологически чистыми автомобилями согласны с запретом на использование газовых транспортных средств в 2035 г. называя политику «смехотворной».
EV за 10 000 долларов, Niro Hybrid на 53 мили на галлон, обзоры Outlander PHEV, Q4 E-Tron, EQS SUV: The Week in Reverse
Какой новый электрический пикап производится, но еще не может быть доставлен? Какой автопроизводитель выпустил адаптер, позволяющий использовать подавляющее большинство устройств быстрой зарядки в США? Это наш взгляд на Неделю в обратном направлении — прямо здесь, в Green Car Reports — за неделю, закончившуюся 30 сентября.
..Бенгт Халворсон
Обзоры внедорожников Audi Q4 E-Tron и Mercedes EQS, Грузоперевозки на водородных топливных элементах Среднего Запада: сегодняшние автомобильные новости — Семья Трон. И сумеет ли группа штатов Среднего Запада США создать собственную водородную экономику? Это и многое другое здесь, в Green Car Reports. В обзоре Audi Q4 2023 года…
Бенгт Халворсон
Обзор: внедорожник Mercedes-Benz EQS 2023 года утешает подающий надежды трехрядный электрический класс
Внедорожник EQS — многообещающая перезагрузка роскошного внедорожного внедорожника для эпохи электромобилей.
Роберт Даффер
Обзор: Audi Q4 E-Tron SUV и Sportback 2023 года больше ориентированы на практичность, чем на производительность .
Джон Фолькер
Союз государств Среднего Запада по производству водорода, потенциально для производства полуфабрикатов на топливных элементах
Коалиция также будет продвигать Средний Запад как многообещающую область для производства водорода с использованием автомобильных, железнодорожных, авиационных и морских перевозок в Великих озерах в качестве потенциальных применений.
Стивен Эдельштейн
Цены на Hyundai Ioniq 5
, Tata EV за 10 000 долларов, производство Lordstown Endurance: сегодняшние автомобильные новости
Бенгт Халворсон
Hyundai Ioniq 5 2023 года получает повышение цен, поскольку дилерские наценки продолжаются. Лордстаун (медленно) производит серийные электрические грузовики Endurance. А где можно купить новый электромобиль примерно за 10 000 долларов? Это и многое другое здесь, в Green Car Reports. Индийский автопроизводитель Tata выпустил на внутренний рынок электромобиль стоимостью 10 000 долларов. С запланированными поставками, которые должны начаться в январе 2023 года, хэтчбек Tiago.ev не будет выделяться ни запасом хода, ни производительностью, но он подчеркивает ценность электромобилей, которые просто не представлены на рынке США. Наряду с новыми функциями, включая…
Первые электрические грузовики Endurance в Лордстауне еще не поступили в продажу
Лордстаун выпустил два первых серийных грузовика Endurance, хотя отсутствие сертификатов пока не позволяет осуществить поставки.
Бенгт Халворсон
Цена на Hyundai Ioniq 5 2023 года выросла на 1500 долларов — до того, как дилеры наценят 10 000 долларов.
Стивен Эдельштейн
Tata выпускает электромобиль стоимостью 10 000 долларов для Индии
Электрический хэтчбек Tiago.ev от индийского автопроизводителя считается одним из самых доступных новых электромобилей в мире; несколько моделей в Китае стоят еще ниже.
Стивен Эдельштейн
Цены Nissan Ariya, Niro Hybrid на 53 мили на галлон, производительность Polestar 3: сегодняшние автомобильные новости
Kia Niro Hybrid с расходом топлива 53 мили на галлон стоит намного меньше 30 000 долларов.
Nissan Ariya 2023 года стоит около 45 000 долларов, но не имеет права на налоговый кредит на электромобиль. И Polestar готовится к презентации своей следующей модели 12 октября. Это и многое другое здесь, в Green Car Reports. Polestar раскрыла еще несколько деталей…Бенгт Халворсон
Kia Niro Hybrid 2023 года стоит 27 785 долларов США, расход топлива в смешанном цикле составляет до 53 миль на галлон чем у предыдущей модели.
Стивен Эдельштейн
 ..
.. Nissan Ariya 2023 года стоит около 45 000 долларов, но не имеет права на налоговый кредит на электромобиль. И Polestar готовится к презентации своей следующей модели 12 октября. Это и многое другое здесь, в Green Car Reports. Polestar раскрыла еще несколько деталей…
Nissan Ariya 2023 года стоит около 45 000 долларов, но не имеет права на налоговый кредит на электромобиль. И Polestar готовится к презентации своей следующей модели 12 октября. Это и многое другое здесь, в Green Car Reports. Polestar раскрыла еще несколько деталей…Крутящий момент и скорость вращения колес автомобилей с мотор-колесами
Для просмотра полной статьи нажмите здесь.
Транспортные средства, приводимые в движение электродвигателями в колесах, не имеют дифференциала, но передают крутящий момент напрямую и независимо на колеса.
Большинство дорожных транспортных средств приводятся в движение одним двигателем или двигателем с трансмиссией, передающей эту мощность на колеса, создавая крутящий момент на ступицах колес. Колеса должны свободно двигаться с разной скоростью относительно друг друга, чтобы можно было проходить повороты и менять дорожное покрытие.
Это достигается с помощью дифференциала, механического устройства, которое в своей простейшей форме передает одинаковый крутящий момент на оба колеса на оси, позволяя им вращаться с разной скоростью. Затем колеса могут вращаться со своей естественной скоростью, определяемой кинематикой транспортного средства.
Так называемый «открытый дифференциал» допускает любую разницу скорости вращения колес на оси. Там, где сила трения между шиной и дорогой сильно отличается на одном колесе от другого, колесо с более низким коэффициентом трения может потерять сцепление с дорогой и быстро раскрутиться. Это может произойти при прохождении поворотов, когда вес автомобиля смещается на внешние колеса, так что внутренние колеса имеют мало сцепления с дорожным покрытием, или когда одно колесо находится на поверхности с плохим сцеплением, например, на льду или рыхлых камнях.
Такая ситуация явно нежелательна, поэтому было разработано несколько систем для противодействия потере сцепления с дорогой, при этом позволяя передавать крутящий момент на колесо с хорошим сцеплением с дорогой. Чаще всего используется «дифференциал повышенного трения» или противобуксовочная система (TCS) для предотвращения пробуксовки колес. Первый представляет собой более сложный механический эквивалент открытого дифференциала, который ограничивает дифференциал скорости вращения колес, а второй притормаживает колесо, теряющее сцепление с дорогой, чтобы предотвратить его раскручивание.
Рис. 1: Электродвигатель Protean Electric с электроникой и тормозом.
Более сложные системы «управления вектором крутящего момента» обеспечивают дальнейшее улучшение управляемости транспортного средства, но встречаются редко из-за их сложности и стоимости.
Транспортные средства с двигателями в колесах не имеют дифференциала, поэтому возникает вопрос, как будет вести себя транспортное средство с точки зрения скорости вращения колес и как можно решить проблемы, связанные с отсутствием тяги. Ответы довольно прямолинейны.
Ответы довольно прямолинейны.
Если колеса-моторы управляются одинаковым крутящим моментом каждого из моторов, транспортное средство будет вести себя точно так же, как если бы был открытый дифференциал. Систему контроля тяги можно использовать для контроля потери тяги, как в обычном автомобиле. С другой стороны, улучшенные плавность хода и управляемость автомобиля могут быть достигнуты за счет динамического изменения распределения крутящего момента между колесными двигателями.
Система мотор-колес
Для целей настоящей статьи система мотор-колес считается состоящей из двух блоков, установленных на противоположных сторонах транспортного средства, по одному на каждое переднее колесо или по одному на каждое заднее колесо рулевое колесо. Каждый блок состоит из электрической машины, инвертора с микропроцессорным управлением и фрикционного тормоза. В случае продуктов Protean Electric они объединены в единый блок, полностью размещенный внутри обода колеса (см. рис. 1), но можно также разместить инвертор в другом месте автомобиля.
рис. 1), но можно также разместить инвертор в другом месте автомобиля.
Двигатель может обеспечивать как положительный (ускоряющий), так и отрицательный (тормозной) крутящий момент, но фрикционные тормоза сохраняются, поскольку потребности в торможении обычно превышают возможности двигателя, а также в случаях, когда электрическая система автомобиля не может принять ток, который восстанавливается при торможении.
Рис. 2: Схема управления внутриколесными электродвигателями.
Мотор-колесо представляет собой устройство, создающее крутящий момент. В примере с двигателем Protean Electric блок управления транспортным средством (VCU) связывается с системой двигателя через шину локальной сети контроллеров (CAN), отправляя запросы крутящего момента каждые несколько миллисекунд (см. рис. 2). В ответ система двигателя развивает требуемый крутящий момент на ступице колеса. По возврату двигатель сообщает о своем состоянии и максимально доступном крутящем моменте. Он также может сообщать о своей скорости, которую VCU может использовать для расширенных функций контроля тяги.
В отличие от двигателей внутреннего сгорания, электродвигатели могут создавать положительный и отрицательный крутящий момент в обоих направлениях. Это называется работой в четырех квадрантах и позволяет трансмиссиям с электродвигателями улучшать функции контроля тяги и устойчивости автомобиля. Кроме того, системы электродвигателей имеют очень быстрое время отклика. Обычно они способны переключаться с максимального положительного крутящего момента на максимальный отрицательный крутящий момент или наоборот менее чем за 10 мс. Возможен высокочастотный контроль, который может повысить безопасность и управляемость автомобиля, особенно с двигателями в колесах с прямым приводом, которые обеспечивают крутящий момент непосредственно на ступицах колес без каких-либо промежуточных валов, осей или шестерен.
Обратите внимание, что двигатель не является устройством с регулируемой скоростью. VCU не может запрашивать скорость от системы двигателя. Как и в случае с обычными трансмиссиями, скорость вращения колес является следствием крутящего момента, приложенного к ступице колеса, в сочетании с сопротивлением вращению, в котором преобладает инерция транспортного средства.
Дифференциал и связанные с ним функции
Дифференциал требуется там, где один силовой агрегат, двигатель внутреннего сгорания или электродвигатель используется для привода двух колес на оси. Без него два колеса на оси были бы вынуждены вращаться с одинаковой скоростью, что привело бы к неприемлемой управляемости автомобиля и износу шин. Дифференциал также является конечным передаточным числом, усиливающим крутящий момент от карданного вала к полуосям (см. рис. 3).
Рис. 3: Обычный заднеприводный автомобиль с дифференциалом.
Дифференциал для неприводных колес не требуется, поскольку они физически не связаны между собой и поэтому могут свободно вращаться с разными скоростями.
Открытый дифференциал
Открытый дифференциал — это самый простой и наиболее распространенный тип дифференциала на дорожных транспортных средствах. Скорости колес определяются кинематикой автомобиля, слегка измененной динамикой шин.
Если не учитывать проскальзывание колес, при прохождении поворотов внешнее колесо будет вращаться быстрее, чем внутреннее. В транспортном средстве с шириной колеи t и радиусом качения r , движущимся со скоростью v по повороту радиусом R , приблизительные угловые скорости внутреннего и внешнего колес определяются уравнением 1
(1)
Обратите внимание, что это чисто результат геометрии ситуации и того факта, что колеса могут свободно вращаться независимо; здесь нет зависимости от крутящего момента, подводимого к колесам (см. рис. 4).
Учет динамики шин изменяет уравнение. 1 немного. Приложение крутящего момента к колесу приводит к так называемому проскальзыванию колеса [1]. Это не означает потери сцепления между шиной и дорогой; скорее, это особенность динамики шины. В результате соотношение между скоростью вращения колеса и скоростью транспортного средства изменяется в соответствии с:
, где s — коэффициент скольжения. Коэффициент скольжения зависит от прилагаемого крутящего момента, а также от свойств шины и поверхности контакта шина-дорога [2]. Коэффициент скольжения может превышать 0,1, в то время как хорошее сцепление сохраняется на хорошем дорожном покрытии и при приложении высокого крутящего момента. С учетом проскальзывания, которое может быть разным для внутренних и внешних колес из-за различий в дорожном покрытии, получаем скорости колес в уравнении 2.
(2)
Поскольку скольжение является функцией крутящего момента, теперь существует некоторая зависимость от крутящего момента на каждом из колес.
Есть дальнейшие незначительные изменения в формуле. 1, которые являются результатом недостаточной или избыточной поворачиваемости транспортного средства и неровностей дорожного покрытия, но они не относятся к данному обсуждению.
Важные выводы, касающиеся поведения ведущих колес с открытым дифференциалом, следующие:
- Скорости колес полностью определяются после допущения, что на каждое колесо передается одинаковый крутящий момент и что два колеса на оси могут свободно вращаться. вращаться с разной скоростью.
- Колеса обретают свою «естественную» скорость, что обеспечивает хорошую управляемость и поведение шин на поворотах.
Пока эти два предположения верны, не имеет значения, как они достигаются.
Моторы-колеса и открытый дифференциал
Самый простой способ управления парой электродвигателей-колес на оси — потребовать равный крутящий момент обоих двигателей.
Оба колеса будут приводиться в движение с одинаковым крутящим моментом независимо от разницы скоростей, если VCU требует от обоих двигателей одинаковый крутящий момент.
В автомобиле с мотор-колесами ведущие колеса физически не связаны полуосями, поэтому они не вынуждены вращаться с одинаковой скоростью. Как и в случае с открытым дифференциалом, они могут свободно вращаться с разными скоростями без ограничений.
Таким образом, два допущения верны для транспортного средства, приводимого в движение электродвигателями в колесах, и поэтому также применимо уравнение 1: поведение колес в транспортном средстве, приводимом в движение электродвигателями в колесах, точно такое же, как и в транспортное средство с центральной силовой установкой, приводимой в движение через открытый дифференциал, если VCU требует одинакового крутящего момента от каждого двигателя в колесе.
Рис. 4: Аккермановская геометрия вращающегося транспортного средства.
Хотя физико-механического дифференциала нет, мы будем называть этот режим управления двигателями в колесах «электронным открытым дифференциалом».
Ограничения открытого дифференциала
Открытый дифференциал и электронный открытый дифференциал подвержены тем же ограничениям, которые возникают, когда одно колесо на оси имеет значительно лучшее сцепление с дорогой, чем другое, и в этом случае:
- Максимальный крутящий момент, который может передаваться на любое колесо, ограничивается колесом с более низким пределом сцепления.
- Нет ничего, что могло бы предотвратить пробуксовку колеса с более низким сцеплением, если крутящий момент был больше, чем может выдержать контакт шины с дорогой.
Существует несколько обстоятельств, которые могут привести к асимметричному ограничению тягового усилия по оси:
- Прохождение поворотов, когда вес смещается на внешние колеса, что снижает предел тягового усилия на внутренних колесах.
- «Сплит- μ » дорожное покрытие, у которого одно колесо находится на хорошем дорожном покрытии, а другое — на рыхлых камнях, льду или воде.
- Вождение по бездорожью.
В обычных транспортных средствах используется ряд технологий для предотвращения пробуксовки колес и потери крутящего момента в этих обстоятельствах. Некоторые из них и их аналоги для колесных двигателей обсуждаются в этой статье.
Противобуксовочная система
Противобуксовочная система предназначена для предотвращения пробуксовки колеса из-за отсутствия сцепления с поверхностью дороги. Он реализован как часть системы электронного контроля устойчивости (ESC), которая может задействовать тормоза отдельно для каждого колеса с помощью блока антиблокировочной тормозной системы (ABS). ESC становится все более распространенным явлением и в настоящее время является обязательным в Европе и США для легковых автомобилей.
Система контроля тяги обнаруживает, что колесо пробуксовывает, и притормаживает это колесо. Помимо контроля потери тяги, это позволяет передавать крутящий момент на противоположное колесо даже при открытом дифференциале или электронном открытом дифференциале, поскольку тормоз противодействует крутящему моменту, прикладываемому трансмиссией к пробуксовывающему колесу.
TCS можно использовать с мотор-колесами точно так же, как и в обычных автомобилях, с теми же результатами. VCU не требует специальных действий.
Ручная тяга, с другой стороны, может контролироваться без использования тормозной системы ESC в транспортном средстве с приводом от мотора-колеса. VCU использует информацию о скорости вращения колес, передаваемую двигателями в колесах, чтобы определить, когда теряется сцепление с дорогой, и уменьшает требуемый крутящий момент на этом колесе. Это может быть сделано без уменьшения потребности в крутящем моменте на другом колесе. Результат может быть лучше, чем у обычной TCS, из-за быстрого времени отклика системы двигателя в колесе и способности двигателей создавать как положительный, так и отрицательный крутящий момент. Мы можем назвать это электронной системой контроля тяги (eTCS).
eTCS чем-то похожа на системы Antriebsshlupfregelung (ASR), которые являются частью системы контроля тяги в некоторых обычных автомобилях и включают модуляцию крутящего момента двигателя.
Самоблокирующийся дифференциал
Самоблокирующийся дифференциал представляет собой более сложную форму механического дифференциала. В производстве находится ряд различных реализаций, в том числе с элементом электронного управления. Здесь они обсуждаются отдельно как «активные дифференциалы».
В отличие от открытого дифференциала, который всегда равномерно распределяет крутящий момент между двумя колесами на оси, дифференциал повышенного трения распределяет крутящий момент в соответствии с относительными скоростями двух колес, что достигается путем добавления механизма, который сопротивляется относительной скорости различия между двумя выходными валами. Крутящий момент уменьшается на более быстром колесе и увеличивается на более медленном колесе, что предотвращает раскручивание колеса, но не снижает общий крутящий момент. Хотя это преодолевает основные ограничения открытого дифференциала, это также приводит к большему крутящему моменту, передаваемому на внутренние колеса во время прохождения поворотов, что вызывает недостаточную поворачиваемость.
В транспортных средствах, приводимых в движение двигателями в колесах, VCU может требовать неодинакового крутящего момента от двух двигателей в ответ на скорость, сообщаемую двигателями, точно так же, как дифференциал повышенного трения. Однако на практике это не обеспечивает оптимального распределения крутящего момента при отсутствии потери тяги. Система eTCS с векторизацией крутящего момента обеспечит превосходную управляемость и контроль тяги.
В обычном автомобиле с дифференциалом повышенного трения можно обеспечить асимметричный крутящий момент на оси без существенного снижения максимального общего крутящего момента на оси. С другой стороны, в мотор-колесах уменьшение крутящего момента на одном колесе не позволяет увеличить крутящий момент на противоположном колесе сверх его максимального крутящего момента. Это неизбежно означает, что общий крутящий момент на оси, создаваемый двумя мотор-колесами, уменьшается из-за асимметрии крутящего момента.
Заблокированный дифференциал
Заблокированный дифференциал может быть эффективен для внедорожников, у которых тяговое усилие на колесах плохое и очень непостоянное. Заблокированный дифференциал заставляет два колеса на оси вращаться с одинаковой скоростью. Затем крутящий момент естественным образом перемещается туда, где есть тяга.
С моторами в колесах VCU может реализовывать контуры управления скоростью на каждом из ведущих колес для достижения того же эффекта. Как описано здесь, сами двигатели не включают управление скоростью, но связь между двигателями и VCU имеет достаточную пропускную способность, чтобы позволить блоку управления транспортным средством (VCU) запускать контуры управления для регулирования скорости вращения колес.
Активный дифференциал
Активный дифференциал — это современная система, применяемая на некоторых автомобилях с высокими характеристиками, которая улучшает управляемость и управляемость за счет активного управления распределением крутящего момента. Система реагирует на различные датчики вокруг автомобиля, которые отслеживают намерения водителя и реакцию автомобиля, которые интерпретируются электронным блоком управления (ЭБУ). Затем ECU дает команду дифференциалу с электронным управлением, который может распределять крутящий момент в соответствии с требованиями. Помимо контроля тяги, такая система может улучшить управляемость и устойчивость. Механически активный дифференциал реализован как самоблокирующийся дифференциал с электронным управлением. Двумя пакетами сцепления обычно можно управлять с помощью электроники для передачи крутящего момента с одной полуоси на другую, тем самым изменяя поведение основного открытого дифференциала под управлением систем управления динамикой автомобиля в автомобиле. Примером такой системы является электронный модуль векторизации крутящего момента GKN, реализованный в BMW X63.
Дифференциал с электронным управлением — сложный и дорогой компонент. Подобная функциональность может быть достигнута без добавления механических компонентов в транспортном средстве с приводом от электродвигателя. В этом случае VCU выполняет расчеты, аналогичные тем, которые ECU выполнял бы для активного дифференциала, и соответственно предъявляет асимметричные требования к крутящему моменту для двух колесных двигателей. Это иногда называют векторизацией крутящего момента, и его можно использовать для:
- Улучшения устойчивости автомобиля на высоких скоростях.
- Повысить устойчивость автомобиля при наличии таких препятствий, как боковой ветер или колеи на дороге.
- Улучшить маневренность автомобиля на низких скоростях.
- Улучшение ощущения при прохождении поворотов и управляемости.
Управление вектором крутящего момента с помощью двигателей в колесах имеет преимущество перед активным дифференциалом в обычном автомобиле не только с точки зрения стоимости компонентов и массы, но и потому, что система более чувствительна и может лучше реагировать на переходные ситуации. Он также может плавно вводить тормозной момент, не используя тормозную систему, что расширяет возможности системы по поддержанию контроля над автомобилем.
Эквивалентность обычного транспортного средства и полноприводного транспортного средства
В таблице 1 приведены различные дифференциальные и связанные с ними системы, используемые в обычных транспортных средствах с двигателем центрального сгорания или электродвигателем, а также описана реализация на полноприводном транспортном средстве, которое приводит к такому же поведению.
В целом, управление скоростью вращения колес и, следовательно, управление транспортным средством в колесном автомобиле может быть лучше, чем в обычном транспортном средстве, и реализовано с меньшими затратами и сложностью.
Полный привод
В данном обсуждении рассматривается пара ведущих передних колес или пара ведущих задних колес транспортного средства. Все выводы в равной степени относятся к транспортному средству с двигателями на всех четырех колесах.
Например, отправка одинакового крутящего момента на все четыре двигателя в колесах дает точно такое же поведение, как у обычного полноприводного автомобиля с открытыми передним и задним дифференциалами и открытым межосевым дифференциалом. Все четыре колеса могут свободно вращаться независимо друг от друга, и на каждую ступицу колеса действует одинаковый крутящий момент.
Заключение
Колёсные электродвигатели позволяют улучшить управление динамикой автомобиля при меньших затратах и сложности по сравнению с обычными автомобилями, передающими мощность на колёса через дифференциал.
| Обычная автомобильная система | Эквивалент для полноприводных транспортных средств |
| Открытый дифференциал | Одинаковая потребность в крутящем моменте для обоих двигателей |
| Система контроля тяги на базе ESC | Контроль тяги на основе ESC, как в обычном автомобиле, или снижение потребности в крутящем моменте при проскальзывании колеса |
| Дифференциал повышенного трения | Уменьшить долю крутящего момента для более быстрого колеса в соответствии с дифференциальной скоростью |
| Заблокированный дифференциал | Реализовать контуры управления скоростью для каждого двигателя в VCU |
| Активный дифференциал | Функция векторизации крутящего момента в VCU |
Простейшая реализация управления двигателем в колесах, всегда требующая одинакового крутящего момента от всех двигателей, приведет к поведению точно так же, как в автомобиле с открытым дифференциалом, но без необходимости в механическом дифференциале. или полуоси. На это поведение можно наложить те же системы контроля тяги и/или устойчивости на основе тормозов, которые используются в обычных транспортных средствах, чтобы предотвратить пробуксовку колес во время прохождения поворотов или на поверхностях с низким сцеплением. С другой стороны, улучшенные функции контроля тяги и управления вектором крутящего момента могут быть достигнуты без добавления дополнительных материалов за счет модуляции крутящего момента, требуемого от электродвигателей, в отличие от обычных транспортных средств, которые требуют сложных, тяжелых и дорогих механических систем, таких как активный дифференциал для достижения аналогичного результата.
Ссылки
[1] М. Бланделл и Д. Харти: Подход многотельных систем к динамике транспортных средств, Оксфорд, Великобритания: Butterworth-Heinemann, 2004.
[2] HB Pacejka: Динамика шин и транспортных средств, Оксфорд, Великобритания: Butterworth-Heinemann, 2002.
[3] GKN plc. (2016 г. , 10 марта): «Электронное управление вектором крутящего момента» (онлайн). -vectoring.aspx
Свяжитесь с Габриэлем Дональдсоном, Protean Electric, [email protected]
Системы внутриколесных двигателей будут повышать производительность электромобилей
Новые системы двигателей в колесах модифицируют ступицу каждого колеса электромобиля (EV), добавляя полную трансмиссию, которая передает крутящий момент на соответствующую шину (рис. 1) . В эти системы мотор-колес также включены тормозные компоненты и электроника моторного привода. Дорожные испытания продемонстрируют производительность и долговечность системы двигателя в колесе, что в конечном итоге повлияет на производительность электромобиля.
1. Установка подвесных двигателей создает дополнительное пространство на шасси для пассажиров или груза.
В настоящее время кажется, что мотор-колеса могут обеспечить преимущества в нескольких областях. Обычные автомобили реализуют такие функции, как контроль тяги и устойчивости, замедляя колесо, которое вращается быстрее, чем должно. Но этот подход довольно медленно реагирует и ограничивается применением тормозящей силы. Чтобы разблокировать скользящую шину, было бы предпочтительнее приложить некоторый крутящий момент. С моторами в колесах вы можете это сделать. Вы можете обеспечить точно контролируемый тормозной или автомобильный крутящий момент в миллисекундной шкале и тем самым значительно улучшить контроль тяги и устойчивости, сократить тормозной путь и повысить управляемость и безопасность.
Мотор-колеса также допускают векторизацию крутящего момента — приложение разного крутящего момента к разным колесам, что может заметно улучшить управляемость. В автомобиле с мотор-колесом эта аппаратная возможность практически бесплатна и требует только подходящего программного обеспечения. В результате автомобиль может проходить повороты как по рельсам; тот, который может чувствовать себя как шустрым в городском потоке, так и стабильным на высоких скоростях.
In-Wheel Evolution
На самом деле, основная технология производства колесных двигателей восходит к концу 19 века. века, когда Фердинанд Порше (нынешней компании) в Вене и Джозеф Ледвинка и Фред Ньюман в Чикаго прикрепили электродвигатель к каждому колесу безлошадной повозки, чтобы просто, эффективно и контролируемо обеспечивать мощность (рис. 2) . Их рудиментарная конструкция не отличалась изощренностью нынешних технологий внутриколесных двигателей.
2. Показана реконструированная версия автомобиля Lohner-Porsche Semper Vivus начала 20-го века с двумя электродвигателями в колесах спереди.
Современные разработчики колесных технологий, такие как Protean Electric, утверждают, что они преодолели или близки к преодолению проблем, связанных с использованием этих двигателей: стоимость, дополнительная масса и дорожные удары. Программное обеспечение для управления двигателем также является ключевой задачей проектирования. Он должен принимать решения о том, какой крутящий момент требуется от каждого двигателя в каждый момент времени, исходя из состояния автомобиля и команд водителя.
В нормальных условиях запустить два двигателя вместо одного несложно. Но если в одном двигателе возникает неисправность, контроллер должен предотвратить развитие опасной асимметрии, которая может привести к неконтролируемому уводу транспортного средства в одну сторону.
В ответ на эту проблему безопасности компания Protean Electric внедрила две полностью независимые системы, способные обнаруживать неисправности и выравнивать крутящий момент между двумя или более двигателями. Транспортные средства должны соответствовать стандарту безопасности ISO 26262, который требует доказательства того, что опасный технический сбой будет чрезвычайно маловероятным. Соответствовать этому стандарту чрезвычайно сложно, но компания Protean уверена, что ее двигатели помогут автопроизводителям в соблюдении этих требований.
Двигатели Protean устанавливаются за колесами автомобиля, поэтому их можно использовать как часть системы привода, не требующей коробки передач, дифференциала или приводных валов. Это создает энергоэффективную трансмиссию, которая потенциально снижает затраты, снижает вес и освобождает место на борту автомобиля, которое ранее предназначалось для компонентов трансмиссии. По данным Protean Electric, ее двигатели в колесах могут увеличить экономию топлива более чем на 30%, в зависимости от размера батареи и ездового цикла в гибридном или подключаемом гибридном автомобиле. Он также способен обеспечивать векторизацию крутящего момента, прикладывая индивидуальный крутящий момент на оптимальном уровне к каждому колесу, чтобы повысить безопасность и управляемость автомобиля.
В колесных двигателях необходимо решить две проблемы:
- Уменьшение неподрессоренной массы, поскольку вес двигателя приходится на каждое приводное колесо.
- Защита от дорожных ударов и тепла при торможении из-за близости мотор-колеса к колесам.
Борьба с неподрессоренной массой
Моторы в колесах добавляют неподрессоренную массу, что является врагом управляемости. Каждый раз, когда автомобиль наезжает на кочку, выбоину или лежачего полицейского, весь этот вес должен двигаться в одном направлении, а затем двигаться в противоположном направлении, как только пружина, к которой он прикреплен, достигает предела своего хода.
Неподрессоренная масса — это все, что находится между системой подвески автомобиля и дорогой. В обычном транспортном средстве это тормоза, подшипники, колеса, шарниры равных угловых скоростей (устройства на концах ведущих осей, которые позволяют им передавать мощность под углом) и шины. Сведение неподрессоренных масс к минимуму — это хорошо. Его уменьшение улучшает качество езды для водителя и пассажиров, а подвеске легче удерживать шины в контакте с дорогой.
Чтобы решить проблему неподрессоренных масс, компания Protean обратилась в английскую компанию Lotus Engineering, признанного эксперта в области плавности хода и управляемости, и попросила ее инженеров объективно исследовать влияние неподрессоренных масс на управляемость автомобиля. Lotus добавил массу до 30 кг к каждому из четырех колес Ford Focus и оснастил автомобиль приборами для измерения вибрации и движения.
Его работа была подкреплена компьютерным моделированием, чтобы получить более глубокое понимание эффектов добавления как статической, так и вращающейся массы к колесам. Кроме того, обученные водители выполнили стандартизированные оценки, чтобы предоставить дополнительную информацию о том, как дополнительная масса повлияла на плавность хода и управляемость.
Компания Lotus обнаружила, что воздействие увеличенной неподрессоренной массы, хотя и заметное для подготовленного водителя, на самом деле не так уж значительно. Добавленная масса заставила автомобиль чувствовать, что его подвеска и рулевое управление еще не подверглись обычной настройке, которая является стандартной частью разработки автомобиля.
Инженеры Lotus смогли устранить большую часть эффекта дополнительной неподрессоренной массы, добавив немного больше демпфирования подвески. Более того, они обнаружили, что, когда эта неподрессоренная масса исходила от реальных двигателей, прикрепленных к колесам, способность независимо приводить в действие каждую сторону автомобиля существенно улучшала управляемость автомобиля.
ProteanDrive
Новейшая система внутриколесных двигателей Protean, называемая ProteanDrive, представляет собой полноценную трансмиссию в колесе. Нет ни передач, ни трансмиссии. Вместо этого ротор электродвигателя соединяется непосредственно со ступицей, передавая крутящий момент от двигателя к колесу. Это помогает максимизировать эффективность и компактность (рис. 3) .
3. Protean Electric Pd18 подходит для 18-дюймового. (46 см) обод колеса. Двигатель может генерировать до 75 кВт или чуть более 100 л.с. на каждое приводное колесо.
Pd18, флагманский продукт Protean, предназначен для установки на обод колеса диаметром 18 дюймов (около 46 см). Pd18, который весит 36 кг (79 фунтов), может развивать крутящий момент 1250 ньютон-метров (Нм) или 922 фунта-фута и 75 кВт мощности на руле. Это означает, что два из них могут предложить до 2500 Нм крутящего момента и 150 кВт мощности.
Это может показаться чрезмерно большим крутящим моментом, учитывая, что типичный автомобильный двигатель внутреннего сгорания может развивать лишь несколько сотен ньютон-метров. Но в обычном автомобиле крутящий момент двигателя умножается на любое передаточное число между двигателем и колесами. На первой передаче это может быть число вроде 10; на более высоких передачах множитель будет ниже. Таким образом, пара Pd18 может соответствовать типичному уровню крутящего момента, обеспечиваемому обычным автомобилем.
В основе ProteanDrive лежит синхронный двигатель с постоянными магнитами и набор тесно интегрированной электроники. Электроника посылает точно контролируемый ток в обмотки двигателя, создавая магнитные поля, которые взаимодействуют с постоянными магнитами из редкоземельных металлов, прикрепленными к ротору. Таким образом, каждый двигатель в колесе может обеспечить требуемый крутящий момент всего за миллисекунду.
Электронные схемы в общем корпусе двигателя охлаждаются вместе с двигателем, обмотки которого могут выдерживать до 90 А, поэтому они рассеивают отработанное тепло. Это тепло вместе с теплом от электроники отводится водой, протекающей через канал охлаждающей жидкости в корпусе двигателя. Хладагент находится в хорошем тепловом контакте как с электронными компонентами, так и с обмотками двигателя. Эти обмотки заключены в защитную эпоксидную смолу, которая помогает отводить тепло. Тесная интеграция двигателя и электроники привода позволяет очень маленькому двигателю генерировать большую мощность.
Программное обеспечение, работающее на микропроцессоре, поддерживаемом программируемой пользователем вентильной матрицей, принимает 16 000 решений в секунду о том, какое напряжение следует подавать на обмотки. Они основаны на измерениях датчиков, которые предоставляют информацию об электрическом и тепловом состоянии двигателя, а также о его положении и скорости. Программное обеспечение гарантирует, что ток, протекающий через двигатель, точно соответствует плавной и бесшумной работе.
Поскольку двигателю не требуется трансмиссия, дифференциал или шарнир равных угловых скоростей (ШРУС) для соединения с колесами, он теряет гораздо меньше энергии на трение. Таким образом, он может использовать меньшую батарею для обеспечения того же диапазона, что приводит к значительной экономии. Это также обещает снизить эксплуатационные расходы, что оценит любой автовладелец, которому приходилось заменять порванный пыльник CV.
Чтобы достичь всего этого, Protean пришлось преодолеть несколько технических проблем. Одним из них была миниатюризация и интеграция инвертора. Большинство инверторов для автомобильных приложений имеют размер большой коробки для обуви. Версия Protean занимает вдвое меньше места, поэтому ее можно аккуратно разместить за электродвигателем. При такой упаковке для каждого двигателя требуется всего два кабеля постоянного тока. Если бы инвертор был установлен в другом месте, потребовалось бы передавать переменный ток по шести кабелям.
Двигатель Protean сконфигурирован с ротором снаружи. При этом зазор между статором и ротором (через который развиваются магнитные силы) имеет максимально доступный радиус, тем самым создавая максимально возможный крутящий момент в пределах обода колеса. Такой подход позволяет двигателю развивать достаточный крутящий момент без необходимости в зубчатой передаче, которая снизила бы эффективность и создала шум.
Воздействие окружающей среды
Колёсная система должна выдерживать различные условия окружающей среды, которым может подвергаться колесо в течение всего срока службы автомобиля, например, удары, вибрация, попадание воды и камней. Когда водитель требует питания от автомобиля, электроника быстро нагревается, а затем остывает; это повторяющееся термоциклирование может привести к преждевременной деградации компонентов.
Компания Protean использовала специальные установки для проверки электроники и выявления слабых мест. Команда инженеров теперь имеет то, что они считают очень надежной конструкцией, которая будет служить в течение всего срока службы автомобиля. Компания определяет срок службы как 300 000 км, 15 лет и 8 000 часов работы — это общие ожидания для этой очень требовательной отрасли.
Какой бы уникальной ни была технология, ее стоимость может быть непомерно высокой. Компания Protean сравнила стоимость типичной электрической трансмиссии с коробкой передач, двигателем, дифференциалом и карданным валом со стоимостью двух колесных двигателей. Хотя два двигателя несколько дороже, чем один центральный двигатель и трансмиссия, внутриколесная система более эффективна, поскольку имеет меньшую массу и не страдает от потерь на трение в трансмиссии. Таким образом, во многих случаях автопроизводитель может поставить автомобиль, который едет быстрее или дальше (или и то, и другое), при этом его стоимость не выше, чем у конкурирующих моделей.
Еще одна проблема, связанная с моторами, установленными в колесах, — это предполагаемый недостаток долговечности. Размещение двигателей в колесах, а не под капотом, означает, что они будут повреждены, когда автомобиль будет двигаться по неровной дороге. Они также будут заброшены водой, песком, гравием и всем другим мусором, по которому мы регулярно проезжаем. Эти условия могут создать проблемы, но испытания Protean показали, что можно разработать продукт, способный выдержать удары.
4. Стратегическое партнерство Protean Electric с LM Industries позволит поставлять двигатели для автономных пассажирских шаттлов этой компании, получивших название Olli.
Компания Protean и американский разработчик транспортных средств с открытым исходным кодом LM Industries заключили партнерское соглашение, чтобы предоставить технологию в колесах для Olli — первый в мире совместно созданный самоуправляемый, электрический и когнитивный шаттл (рис. 4) .
Автономный электрический шаттл Fisker Orbit будет использовать технологию двигателя в колесе для увеличения внутреннего пространства (рис. 5) . В колесе используется технология Protean Electric.
5. В Fisker Orbit, автономном маршрутном автобусе, используются мотор-колеса.
Competition
Словенская компания Elaphe также производит колесные технологии для использования в электромобилях (рис. 6) . Компания Elaphe испытала свой полностью электрический привод на замерзшей реке в Китае при температуре ниже −30 °C (–22 °F), чтобы доказать, что контроль тяги на льду лучше, чем в автомобилях с ДВС
Немецкая компания Ziehl-Abegg создал двигатель для ступицы колеса, который можно было бы использовать в серийных гибридных, аккумуляторных и коммерческих автомобилях на топливных элементах.
Компания Nissan разработала мотор-колеса для BladeGlider — рабочего прототипа своего футуристического концепт-кара.
Can переднеприводная мощность двигателя автомобиля задний привод f…
Can переднеприводная мощность двигателя автомобиля задний привод f…
Задайте вопрос, получите ответ как можно скорее!
☰
×
ЗАПРОСИТЬ ЦЕНУ
спросил
Али
на
10 июля 2016 г.
Привет, сэр, у меня есть один вопрос, можно ли преобразовать двигатель toyota corolla в задний привод, двигатель, который находится в toyota corolla, приводит в движение переднее колесо, но можем ли мы взять этот двигатель и преобразовать его в задний привод? и установка этого двигателя в средней компоновке двигателя заключается в том, что возможна замена двигателя каждого переднеприводного автомобиля на задний привод, потому что основная цель двигателя — дать мощность, но это зависит от производителя, чтобы дать ему переднее, заднее или все колеса привод, но могут ли все переднеприводные двигатели, такие как двигатели toyota nissan honda, могут быть преобразованы в заднеприводные, жду ответа, действительно спасибо
| Сэкономьте на ремонте автомобилей | Получить предложение |
Джей Саффорд
Автомобильный механик
16 лет опыта
Все возможно при достаточном уровне техники. Изменения, на которые вы смотрите, потребуют серьезных структурных изменений и определенно не будут легкой задачей. Возможно, вы могли бы проконсультироваться с инженером-технологом, чтобы получить более подробную информацию о том, как это может быть выполнено на самом деле и будет ли это возможно.
Заявления, приведенные выше, предназначены только для информационных целей и должны быть проверены независимо. Пожалуйста, смотрите наш
условия обслуживания
подробнее
Получите мгновенную смету для вашего автомобиля
К вам приедут наши сертифицированные механики ・Гарантия на 12 месяцев и пробег 12 000 миль・Справедливые и прозрачные цены
Узнать цену
Механик со стажем?
Зарабатывайте до
$70/час
Подать заявку
Что спрашивают другие
Сильный шум двигателя, автомобиль слишком новый, чтобы иметь эту проблему
Проблема, с которой вы столкнулись, связана с двигателем и коробкой передач во время цикла холодного запуска и прогрева. Ваш опыт вождения до прогрева двигателя может отличаться от опыта после того, как он прогреется. Есть отзыв производителя, что…
Окно со стороны пассажира не работает.
Невозможность опустить окно вашего Tahoe — это не только неприятная ситуация, но и проблема безопасности. Если вы пытаетесь опустить окно автомобиля с помощью электрической кнопки, и либо ничего не происходит, либо вы…0003
Звуковой сигнал и круиз-контроль не работают.
К сожалению, у меня нет под рукой электрической схемы этого автомобиля. Однако я предполагаю, что часовая пружина каким-то образом была повреждена. Если сигнальная лампа SRS (подушки безопасности) также горит, это еще больше указывает на то, что часовой пружине требуется…
Кондиционер, вызывающий перегрев автомобиля
просто неправильно читает. Если ваш автомобиль перегревается; у вас, несомненно, будет кипение из радиатора или резервуара. Тот факт, что ваш калибр…
Датчик продувочного потока, код
Здравствуйте, это довольно редко случается с проблемой продувочного потока. Поток продувки относится к системе EVAP автомобиля. Эта система собирает топливо, которое испаряется внутри бензобака, чтобы обеспечить почти 100%…
Толщина тормозного диска перед заменой
Стандартная толщина новых передних дисков составляет 28 мм или 1,102 дюйма. Минимальная толщина до или после обработки составляет 25,0 мм или 0,983 дюйма. Это означает, что вы не можете снять более 3 мм или 0,10 дюйма, если…
Коробка передач не переключается на вторую передачу
Возможно, ваша коробка передач находится в аварийном режиме. Если контроллер обнаружил проблему со второй передачей, например, пробуксовку, он может пропустить вторую передачу, чтобы вы могли управлять автомобилем. Сканирование автомобиля на наличие неисправностей. ..
Что может быть причиной того, что ваш автомобиль не включает передачу?
Судя по вашему описанию, проблема может быть в двигателе, трансмиссии или в обоих. Если это связано с коробкой передач, это может быть просто низкий уровень трансмиссионной жидкости или сложная внутренняя неисправность в коробке передач…
В моей машине возникла проблема с датчиком положения дроссельной заслонки, поэтому я заменил весь корпус дроссельной заслонки, и индикатор снова загорелся. Любые идеи?
Существует процедура повторного обучения/калибровки, которая обычно выполняется при замене датчика положения дроссельной заслонки. Если эта процедура не была выполнена, она может иметь значение в вашем случае. Код (P0121), на который вы ссылаетесь, подразумевает не только…
Статьи по Теме
Сравнение трансмиссий — FWD, RWD, AWD
Трансмиссия автомобиля состоит в основном из двигателя и трансмиссии. Остальное — части, которые берут мощность от трансмиссии и передают ее на колеса — это те части, которые действительно…
Что такое передний привод?
Если транспортное средство имеет передний привод, то вся мощность двигателя передается на землю через два передних колеса. Эта схема чрезвычайно популярна в современных транспортных средствах для ряда…
Моделирование поведения клиентов при бронировании
Мотивация Мотивация Моделирование помогает нам, когда мы хотим узнать больше о проблемах реального мира, подобно хрустальному шару, помогающему волшебнику предсказывать будущее. В YourMechanic мы каждый день сталкиваемся с реальными вопросами, такими как: Должны ли мы…
Просмотрите другой контент
Техническое обслуживание
Города
Смета
Услуги
Как настроить транспорт в Unreal Engine
Выберите свою операционную систему:
Windows
macOS
Linux
См. также
На этой странице
Транспортное средство состоит из следующих отдельных активов.
A Скелетная сетка
Актив физики
- .
Актив плавающей кривой, представляющий кривую крутящего момента двигателя.
Они одинаковы независимо от того, создаете ли вы автомобиль или мотоцикл. Этот документ проведет вас через процесс настройки транспортного средства.
Включение плагина Chaos Vehicles.
Создание и редактирование чертежей колеса хаоса.
Создание объекта кривой для крутящего момента двигателя.
Импорт сетки транспортных средств.
Создание и редактирование физического объекта.
Создание Animation Blueprint с помощью узла Wheel Controller.
Создание чертежа автомобиля.
Настройка входов управления транспортным средством.
Настройка игрового режима «Транспорт».
Включение плагина Chaos Vehicles
Перед использованием Chaos Vehicles необходимо включить плагин Chaos.
Нажмите Настройки > Плагины , чтобы открыть Меню плагинов .
Щелкните категорию Physics и включите ChaosVehiclesPlugin.
Создание и редактирование чертежей колеса хаоса
Чертеж колеса — это место, где настраивается конфигурация комбинации колеса/подвески/тормоза.
В большинстве случаев вам потребуется как минимум два типа колес на транспортное средство. Колесо (или ось), на которое действует руль/двигатель/ручник, и то, на которое нет. Кроме того, это может иметь место при наличии передних или задних колес разного размера, и в этом случае у вас есть полный контроль над настройкой различных радиусов, массы, ширины, эффекта ручного тормоза, подвески и многих других свойств, чтобы дать вашему автомобилю желаемое обращение.
Количество колес на транспортном средстве не ограничено. Несколько транспортных средств могут использовать одни и те же чертежи колес, но эта стратегия действительна только в том случае, если размеры колес и пределы подвески одинаковы.
Создание схемы колеса
В обозревателе содержимого щелкните правой кнопкой мыши и выберите Blueprint Class в разделе Create Basic Asset .
В Окно выбора родительского класса , в разделе Все классы найдите «колесо» и выберите ChaosVehicleWheel . Щелкните . Выберите , чтобы создать актив.
Новый актив будет создан в Content Browser . Дайте ему узнаваемое имя, чтобы вы могли легко найти его позже (например, «BP_ChaosFrontWheel»).
( Необязательный шаг ) Повторите эти шаги еще раз, чтобы получить передний и задний колесный тип.
Думайте о каждом как о настройке на ось.
Редактирование чертежа колеса
Дважды щелкните ресурсы в обозревателе содержимого , чтобы открыть их в редакторе чертежей, где есть параметры для редактирования колес.
Для начала необходимо изменить пять свойств для каждого колеса, так как остальные свойства зависят от поведения автомобиля (и должны быть изменены позже) во время испытаний.
Собственность | Примечания |
|---|---|
Тип оси | Определяет, находится ли колесо спереди или сзади автомобиля. |
Радиус колеса | Должен соответствовать размеру визуализируемой модели в сантиметрах (см). |
Влияет на ручной тормоз | Включите это на задних колесах. |
Влияет на двигатель | Включите это на задних колесах для автомобиля с задним приводом (RWD). Включите это на передних колесах для автомобилей с передним приводом (FWD). Включите это на всех колесах для полноприводных (AWD) автомобилей. |
Влияет на рулевое управление | Включите это на передних колесах. Для транспортных средств с большим количеством колес спереди (например, кабина грузовика может иметь рулевое управление четырьмя колесами) включите его на втором уровне с другим углом поворота рулевого колеса. В качестве альтернативы возможно управление всеми колесами путем выбора управления задними колесами с отрицательным углом поворота. |
Максимальный угол поворота | Обычно это положительное значение (указывается в градусах). Однако для полноприводных (AWD) автомобилей разрешено отрицательное значение противодействия задним колесам. |
Пример значений класса по умолчанию для чертежа Chaos Wheel.
Для примера с багги установите Радиус колеса на 58 для чертежей переднего и заднего колеса.
Создание актива кривой для крутящего момента двигателя
Кривая крутящего момента представляет величину крутящего момента, выдаваемого двигателем при заданных оборотах. Ось X графика представляет число оборотов двигателя (оборотов в минуту) в диапазоне от 0 до максимального числа оборотов двигателя. Ось Y представляет выходной крутящий момент двигателя в Нм (Ньютон-метры). Типичная кривая крутящего момента представляет собой перевернутую U-образную форму с пиком крутящего момента около середины диапазона оборотов и спадом с обеих сторон.
Чтобы создать кривую крутящего момента, выполните следующие действия:
В обозревателе содержимого щелкните правой кнопкой мыши и выберите Разное > Кривая . Выберите тип Curve Float и нажмите кнопку Select , чтобы создать актив.
Назовите актив TorqueCurve .
В Content Browser дважды щелкните TorqueCurve , чтобы открыть его в Curve Editor . Добавьте точки, чтобы создать форму кривой по своему вкусу.
Импорт сетки автомобиля
В этом руководстве используется модель автомобиля Buggy из примера проекта Vehicle Game . В программе запуска Epic Games щелкните вкладку «Обучение» , чтобы найти проект.
Редактор физики транспортных средств
После импорта сетки транспортного средства в проект выполните следующие действия, чтобы просмотреть сетку в редакторе физических активов .
В Content Browser , дважды щелкните транспортное средство Skeletal Mesh , чтобы открыть его.
Щелкните вкладку Physics , чтобы открыть редактор Physics Asset Editor .
Создание и редактирование физического актива
Создание физического актива
Если у вас есть скелетная сетка, которая не имеет связанного физического актива, вы можете создать физический актив, выполнив следующие действия:
В контент браузере щелкните правой кнопкой мыши актив скелетной сетки и выберите Create > Physics Asset > Create and Assign .
Щелкните раскрывающийся список Primitive Type и выберите Single Convex Hull . Нажмите Create Asset , чтобы создать новый физический актив.
Это создаст физический актив с формами столкновения по умолчанию для каждой из костей.
Первоначальная настройка коллизии, скорее всего, не будет идеальной, так как будет использоваться один и тот же тип примитива для представления всех костей в физическом ассете.В браузере содержимого щелкните правой кнопкой мыши физический ресурс , чтобы открыть его в редакторе Physics Asset Editor .
В редакторе Physics Asset Editor вы можете настроить примитивы столкновения, используемые на каждой кости, чтобы они лучше подходили к сетке транспортного средства.
Редактирование объекта Physics
В окне Skeleton Tree щелкните значок шестеренки и выберите Показать примитивы .
Выберите все кости колеса в окне дерева скелетов.
Перейдите в окно Tools и в разделе Body Creation щелкните раскрывающийся список Primitive Type и выберите Sphere .
Нажмите Повторно создать тела .Теперь вы можете видеть примитивы сферы на каждом из колес.
Выберите подвеску кости внутри окна Skeleton Tree . Щелкните правой кнопкой мыши и выберите Collision > No Collision , чтобы удалить столкновение с подвеской автомобиля.
Создание Animation Blueprint с помощью узла Wheel Controller
Animation Blueprints используются для управления анимациями Vehicle Skeletal Mesh, характерными для данного автомобиля, такими как вращающиеся шины, подвеска, ручные тормоза и анимации рулевого управления. Чтобы разгрузить большую часть работы по созданию анимаций такого типа, вы можете использовать Узел контроллера колеса для управления анимацией.
Узел контроллера колес
Там, где для получения и управления анимацией автомобиля используется Animation Blueprint, узел Wheel Controller упрощает управление всеми анимациями автомобиля практически без дополнительной настройки.
Узел получает необходимую информацию от колес (например, «Как быстро оно крутится?» или «Влияет ли на него ручной тормоз?» или «Какие настройки подвески для этого колеса?») и переводит результатом запроса является анимация кости, с которой связано колесо.
Создание схемы анимации
В контент браузере щелкните правой кнопкой мыши и выберите Animation > Animation Blueprint .
В окне Create Animation Blueprint выберите родительский класс VehicleAnimationInstance и выберите из списка транспортное средство Skeleton . Щелкните Create , чтобы создать новый актив Animation Blueprint.
В обозревателе содержимого дважды щелкните анимационный чертеж , чтобы открыть его.
Щелкните правой кнопкой мыши Anim Graph и найдите, затем выберите Mesh Space Ref Pose .
Щелкните правой кнопкой мыши Anim Graph и найдите, затем выберите Wheel Controller for WheeledVehicle . Соедините узел Mesh Space Ref Pose с узлом Wheel Controller .
Щелкните правой кнопкой мыши Anim Graph и выполните поиск, затем выберите Component To Local . Соедините узел Wheel Controller с узлом Component To Local . Соедините узел Component To Local с узлом Output Pose .
( Дополнительный шаг ) Если у вас есть дополнительные стойки или другие потребности в подвеске (например, образец багги из Vehicle Game ), вам потребуются дополнительные узлы в Animation Graph для обработки соединений, влияющих на эти полигоны. Например, в багги дополнительные шарниры используются для управления соединениями осей с колесами.
Они управляются узлами Look At , которые при задании колесных шарниров будут управляться узлом Wheel Controller . Узлы Look At гарантируют, что подвеска останется прикрепленной к колесам, как показано в следующем примере.
Багги использует следующую композицию узла Look At:
Кость | Посмотрите на |
|---|---|
F_L_Подвеска | F_L_wheelJNT |
F_R_Подвеска | F_R_wheelJNT |
B_L_Подвеска | B_L_wheelJNT |
B_R_Подвеска | B_R_wheelJNT |
B_L_wheelJNT | B_L_Подвеска |
B_R_wheelJNT | B_R_Подвеска |
Создание чертежа автомобиля
В этом разделе вы создадите чертеж транспортного средства, в котором будут использоваться все активы, созданные в предыдущих разделах.
В Content Browser щелкните правой кнопкой мыши и выберите Blueprint Class из категории Create Basic Asset .
В окне Pick Parent Class разверните раздел All Classes , найдите и выберите WheeledVehiclePawn . Нажмите Выберите для создания нового актива Blueprint.
В Content Browser дважды щелкните Vehicle Blueprint , чтобы открыть его.
В окне Components щелкните компонент Mesh Skeletal Mesh Component. Перейдите на панель Details и в разделе Mesh щелкните раскрывающийся список Skeletal Mesh . Выберите актив Skeletal Mesh вашего автомобиля.
На панели Details прокрутите до раздела Animation и щелкните раскрывающийся список Anim Class .
Выберите Animation Blueprint вашего автомобиля.На панели Details перейдите к разделу Physics и установите флажок Simulate Physics .
В окне Components нажмите Добавьте компонент , найдите и выберите Пружинный рычаг .
Выбрав компонент Пружинный рычаг , нажмите Добавить компонент и выполните поиск, затем выберите Камера .
В Viewport выберите Camera и расположите ее по своему вкусу.
Выберите компонент Camera и перейдите к Details 9Панель 0102. Прокрутите до раздела Настройки камеры и убедитесь, что Использовать поворот управления пешкой отключен.
Это гарантирует, что камера будет привязана к своему направлению обзора, а не к направлению обзора контроллера игрока.
Выберите компонент «Движение транспортного средства» в окне « Компоненты «.
Перейдите на панель Details и перейдите к Vehicle Setup 9раздел 0102. Разверните стрелку рядом с Wheel Setups и установите следующие параметры для каждого колеса:
Порядок, который вы назначаете колесам, не имеет отношения к тому, переднее это колесо или заднее, только Bone Name и Wheel Class имеют какое-либо значение. В организационных целях мы рекомендуем сохранять колеса в одном и том же порядке для каждой новой машины (например: FL, FR, BL, BR). Сохранение стандарта помогает при доступе к данным колеса по индексу колеса (индекс в массиве Wheel Setup).
Если транспортному средству требуется более 4 колес, щелкните значок + рядом со свойством Настройки колес , чтобы добавить больше колес или, наоборот, удалить колеса по мере необходимости.
В окне Components выберите компонент Movement и перейдите на панель Details . Прокрутите вниз до раздела Механическая настройка и разверните категорию Настройка двигателя . Расширение кривой крутящего момента и добавьте актив кривой крутящего момента в раскрывающийся список Внешняя кривая .
Настройка входов управления транспортным средством
Щелкните Настройки > Настройки проекта , чтобы открыть окно Настройки проекта .
Перейдите в категорию Input и настройте управляющие входы для рулевого управления, газа, тормоза и ручного тормоза. На изображении ниже показаны входные данные для багги в игре с транспортными средствами.
В Content Browser дважды щелкните Vehicle Blueprint , чтобы открыть его.
Щелкните правой кнопкой мыши на графике событий и выполните поиск, затем выберите Throttle , чтобы добавить событие ввода Throttle.
Соедините узел InputAxis Throttle с узлом Set Throttle Input . Подключите Axis Value контакт от InputAxis Throttle к контакту Throttle узла Set Throttle Input .
Выполните шаги, описанные выше, и добавьте узлы для Set Brake Input и Set Steering Input и соедините их с соответствующими входными событиями.
Выполните шаги, описанные выше, и добавьте узлы для Set Pitch Input , Set Roll Input и Set Yaw Input и соедините их с соответствующими входными событиями.
Выполните шаги, описанные выше, и добавьте узлы для Set Change Up Input и Set Change Down Input и соедините их с соответствующими входными событиями.
Выполните шаги, описанные выше, дважды добавьте узел для Set Handbrake Input и соедините каждый узел с контактами Pressed и Released узла InputAction Handbrake . Включить новый ручной тормоз на узле Set Handbrake Input , подключенном к контакту Pressed .
Настройка игрового режима автомобиля
В обозревателе содержимого щелкните правой кнопкой мыши и выберите Blueprint Class из категории Create Basic Asset .
В окне Pick Parent Class выберите Game Mode Base , чтобы создать схему игрового режима.
В Content Browser дважды щелкните новый Game Mode Blueprint , чтобы открыть его.
Перейдите на панель Details и перейдите к разделу Classes .