Содержание
Импульсно-инерционный электродвигатель
Полезная модель касается конструкции электродвигателей постоянного тока, в частности безредукторных коллекторных электродвигателей низкого напряжения, и может быть использована в качестве мотор-колес на транспорте или иных областях техники.
Задача предлагаемого решения — повышение эксплуатационно-технических характеристик за счет повышения числа оборотов и снижения затрат энергии.
Для решения поставленной задачи предложена новая схема электродвигателя, в котором изменено расположение и связи между узлами. Электродвигатель содержит источник постоянного тока, электромагниты 3, каждый в виде двух катушек 4 с последовательно встречным направлением обмоток, чередующиеся постоянные магниты 6, расположенные по окружности, и распределительный коллектор, состоящий из токопроводящих пластин 7, которые разделены между собой диэлектрическими промежутками 8, а также токосъемные щетки 10, установленные с возможностью контакта с пластинами коллектора. В отличие от известных схем в предлагаемом электродвигателе электромагниты равномерно расположены на неподвижной окружности статора 2, чередующиеся постоянные магниты равномерно установлены по окружности вращающегося ротора 5, распределительный коллектор жестко соединен с ротором, токопроводящие пластины коллектора соединены друг с другом проводником 9, при этом каждая из токосъемных щеток состоит из двух частей, разделенных диэлетриком, а источник постоянного тока соединен с катушками электромагнитов.
В отличие от известных схем в предлагаемом электродвигателе электромагниты равномерно расположены на неподвижной окружности статора 2, чередующиеся постоянные магниты равномерно установлены по окружности вращающегося ротора 5, распределительный коллектор жестко соединен с ротором, токопроводящие пластины коллектора соединены друг с другом проводником 9, при этом каждая из токосъемных щеток состоит из двух частей, разделенных диэлетриком, а источник постоянного тока соединен с катушками электромагнитов.
Кроме того, токопроводящие пластины расположены по лучам промежутков между постоянными магнитами, при этом длина пластин соответствует промежутку между постоянными магнитами. Щетки токосъемников по длине соответствуют промежутку между пластинами коллектора. Количество токопроводящих пластин в распределительном коллекторе равно половине числа постоянных магнитов статора.
4 п.ср., 1 рис.
Полезная модель касается конструкции электродвигателей постоянного тока, в частности безредукторных коллекторных электродвигателей низкого напряжения, и может быть использована в качестве мотор-колес на транспорте или иных областях техники.
Известен встроенный электродвигатель (WO 93/08999 А1, 13.05.93), содержащий две основные части: неподвижный статор, закрепленный на оси и имеющий магнитопровод с постоянными магнитами, размещенными равномерно, и подвижный ротор, несущий обод и содержащий по крайней мере две группы электромагнитов, а также распределительный коллектор, закрепленный на статоре и имеющий токопроводящие пластины, соединенные с источником постоянного тока. На роторе закреплены токосъемники, имеющие электрический контакт с пластинами распределительного коллектора. Однако описанный электродвигатель и его разновидности имеют ряд недостатков, главный из которых заключается в необходимости больших пусковых и переходных токов при начале движения и ускорении транспортного средства. Это приводит к быстрому износу и порче аккумуляторов и ухудшению теплового режима. Также названные электродвигатели имеют низкий крутящий момент, что существенно ограничивает область их практического использования.
Известны аналогичные электродвигатели по патентам на изобретения 2248657 от 2003 г. и 2303536 от 2006 г. Указанные электродвигатели содержат статор, на котором размещены с одинаковым шагом постоянные магниты. На роторе закреплено четное число электромагнитов, которые расположены попарно напротив друг друга. Каждый электромагнит содержит две катушки с последовательно встречным направлением обмоток. Распределительный коллектор закреплен на
и 2303536 от 2006 г. Указанные электродвигатели содержат статор, на котором размещены с одинаковым шагом постоянные магниты. На роторе закреплено четное число электромагнитов, которые расположены попарно напротив друг друга. Каждый электромагнит содержит две катушки с последовательно встречным направлением обмоток. Распределительный коллектор закреплен на
корпусе статора и состоит из токопроводящих пластин, которые расположены по окружности, разделены диэлектрическими промежутками и соединены с чередованием полярности с источником постоянного тока. С пластинами коллектора контактируют токосъемники, при этом каждый из них подключен к одноименному выводу обмоток соответствующих электромагнитов. Обмотки катушек смежных электромагнитов соединены последовательно, а выводы обмоток противоположных электромагнитов, не подключенные к токосъемникам, соединены между собой. Алгоритм работы указанных двигателей, а также их эксплуатационно-технические характеристики не обеспечивают эффективной и надежной работы.
Наиболее близким техническим решением к заявляемому импульсно-инерционному двигателю можно считать двигатель по патенту РФ на изобретение 2285997, 2005 г. Электродвигатель содержит статор с круговым магнитопроводом, на котором закреплено четное количество постоянных магнитов с одинаковым шагом;
ротор, отделенный от статора воздушным промежутком и несущий четное число электромагнитов, которые расположены попарно напротив друг друга;
распределительный коллектор, закрепленный на корпусе статора и имеющий расположенные по окружности токопроводящие пластины, соединенные с чередованием полярности с постоянным источником тока и разделенные диэлектрическими промежутками;
токосъемники, установленные с возможностью контакта с пластинами коллектора, причем каждый из токосъемников подключен к одноименному выводу обмоток соответствующих электромагнитов.
Каждый из электромагнитов имеет по две катушки с последовательно встречным направлением обмотки, причем обмотки катушек смежных электромагнитов соединены последовательно, а выводы обмоток противоположных электромагнитов, не подключенные к токосъемникам, соединены между собой.
Однако при таком схемном решении в процессе работы двигателя постоянно меняется направление поля, что снижает количество оборотов (до 300 об/мин) и повышает расход энергии.
Задача предлагаемого решения — повышение эксплуатационно-технических характеристик за счет повышения числа оборотов и снижения затрат энергии.
Для решения поставленной задачи предложена новая схема электродвигателя, в котором изменено расположение и связи между узлами.
Электродвигатель содержит источник постоянного тока, электромагниты, каждый в виде двух катушек с последовательно встречным направлением обмоток, чередующиеся постоянные магниты, расположенные по окружности, и распределительный коллектор, состоящий из токопроводящих пластин, которые разделены между собой диэлектрическими промежутками, а также токосъемные щетки, установленные с возможностью контакта с пластинами коллектора. В отличие от известных схем в предлагаемом электродвигателе электромагниты равномерно расположены на неподвижной окружности статора, чередующиеся постоянные магниты равномерно установлены по окружности вращающегося ротора, распределительный коллектор жестко соединен с ротором, токопроводящие пластины коллектора соединены друг с другом проводником, при этом каждая из токосъемных щеток состоит из двух частей, разделенных диэлетриком, а источник постоянного тока соединен с катушками электромагнитов.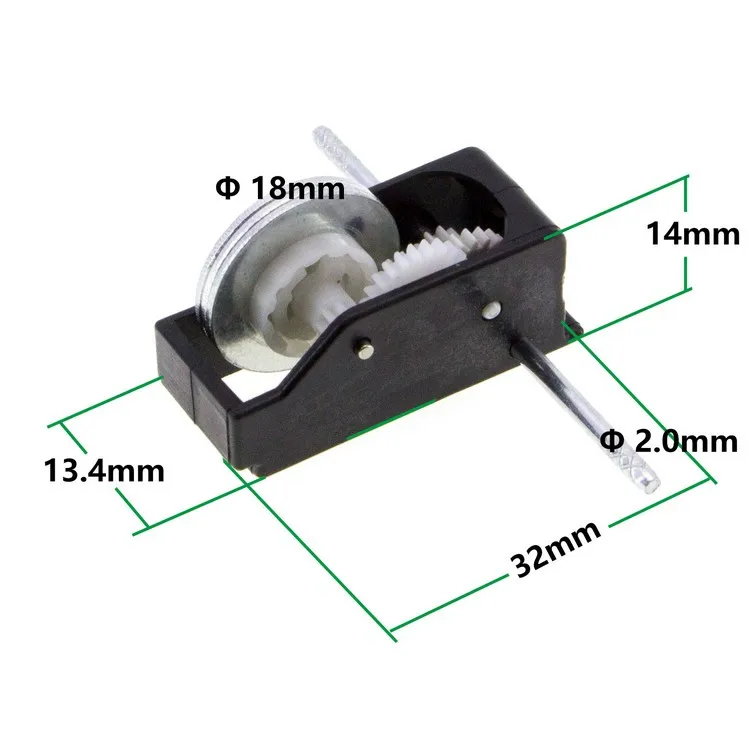
Кроме того, токопроводящие пластины расположены по лучам промежутков между постоянными магнитами, при этом длина пластин соответствует промежутку между постоянными магнитами. Щетки токосъемников по длине соответствуют промежутку между пластинами коллектора. Количество токопроводящих пластин в распределительном коллекторе равно половине числа постоянных магнитов статора.
Предлагаемое схемное решение исключает изменение поля, уменьшает затраты энергии, позволяет повысить число оборотов двигателя и расширить сферу его применения.
Сущность полезной модели поясняется следующими чертежами:
фиг.1 — схема электродвигателя.
На фиг.1 изображена схема электродвигателя. На оси 1 жестко закреплен статор 2, на неподвижной окружности которого равномерно расположено четное число электромагнитов 3, в данном случае 6 электромагнитов. Электромагниты расположены попарно напротив друг друга и образуют три пары. Каждый из указанных электромагнитов имеет по две катушки 4 (правую и левую) с последовательно встречным направлением обмотки, (то есть, если одна из катушек намотана по часовой стрелке, то другая — против часовой). Между собой катушки 4 одного электромагнита соединены последовательно, конец обмотки первой катушки электромагнита соединен с началом обмотки второй катушки электромагнита.
Между собой катушки 4 одного электромагнита соединены последовательно, конец обмотки первой катушки электромагнита соединен с началом обмотки второй катушки электромагнита.
Катушки электромагнитов соединены с разноименными полюсами источника питания.
На оси 1 концентрично статору 2 закреплен вращающийся ротор 5, по окружности которого равномерно установлены чередующиеся постоянные магниты N-S 6. На роторе 5 концентрично постоянным магнитам 6 жестко закреплен распределительный коллектор, состоящий из равномерно расположенных по окружности токопроводящих пластин 7. Пластины 7 с наружной стороны разделены изоляционным материалом 8, а с противоположной стороны соединены друг с другом проводником 9. Количество токопроводящих пластин 7 всегда нечетно и определяется соотношением n:2, где n — количество постоянных магнитов.
Пластины 7 расположены по лучам промежутков между постоянными магнитами 6, через один, с небольшим сдвигом. Длина пластин 7 не должна быть меньше длины промежутка между постоянными магнитами 6.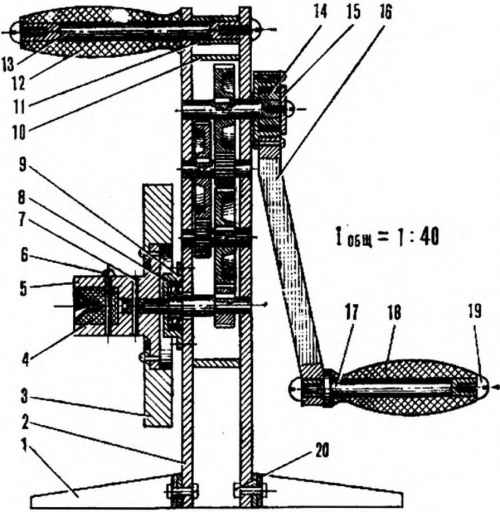
Электродвигатель работает от источника питания. К его положительному контакту параллельно присоединены входы обмоток правых катушек электромагнитов, а к отрицательному — выходы обмоток левых катушек.
Выходы обмоток соединены с токосъемными щетками 10, которые закреплены с возможностью контакта с токопроводящими пластинами 7 коллектора. Щетки 10 также имеют правые и левые части, разделенные диэлектриком. Длина пластин щеток 10 соответствует ширине промежутка между пластинами 7 коллектора.
Принцип действия предлагаемого электродвигателя, аналогичен традиционному электродвигателю постоянного тока и основан на силах электромагнитного притяжения и отталкивания, возникающих при взаимодействии электромагнитов статора и постоянных магнитов ротора. При прохождении ротором положения, когда ось электромагнита расположена между осями постоянных магнитов, катушки электромагнита запитаны так, что создают магнитный полюс, противоположный полюсу последующего в направлении вращения постоянного магнита и одноименный с полюсом предыдущего постоянного магнита. Таким образом, электромагнит одновременно отталкивается от предыдущего и притягивается к последующему постоянному магниту. При прохождении постоянным магнитом положения напротив оси электромагнита последний обесточен, поскольку токосъемник располагается напротив диэлектрического промежутка. Это положение ротор проходит по инерции. Преимущества настоящего электродвигателя
Таким образом, электромагнит одновременно отталкивается от предыдущего и притягивается к последующему постоянному магниту. При прохождении постоянным магнитом положения напротив оси электромагнита последний обесточен, поскольку токосъемник располагается напротив диэлектрического промежутка. Это положение ротор проходит по инерции. Преимущества настоящего электродвигателя
заключаются в строго определенном соотношении числа электромагнитов и постоянных магнитов и их взаиморасположении, а также в используемой схеме коммутации электромагнитов.
Электродвигатель работает следующим образом. При включении источника питания ток от положительного полюса источника постоянного тока проходит через катушки 4 электромагнитов 3, далее через правые части щеток на соединенные между собой проводником пластины 7 коллектора. Далее, через пластины 7 коллектора, ток подается на левые щетки и через обмотки левых электромагнитов на отрицательный контакт источника питания, цепь замыкается. Поле электромагнита вступает во взаимодействие с постоянным магнитом и возникает момент силы, поворачивающий ротор, и подводящий токопроводящие пластины коллектора к следующим щеткам.
При изменении полярности тока на входе, двигатель крутится в противоположную сторону.
В данной схеме электродвигателя достигнуто уменьшение скачков напряжения (электропотребление) при разгоне электродвигателя и улучшены его динамические характеристики. Электродвигатель работает без изменения направления поля, уменьшена длина пути, которую ротор проходит по инерции, что позволило снизить его энергоемкость. Предлагаемая схема позволила также при тех же энергетических затратах увеличить число оборотов двигателя и расширить тем самым область его применения.
Настоящее предложение позволило улучшить эксплуатационно-технических характеристик электродвигателя при сохранении относительной простоты конструкции и надежности.
1. Импульсно-инерционный электродвигатель, содержащий источник постоянного тока, электромагниты, каждый в виде двух катушек с последовательно встречным направлением обмоток, расположенные по окружности чередующиеся постоянные магниты и распределительный коллектор, состоящий из токопроводящих пластин, которые разделены между собой диэлектрическими промежутками, а также токосъемные щетки, установленные с возможностью контакта с пластинами коллектора, отличающийся тем, что электромагниты равномерно расположены на неподвижной окружности статора, чередующиеся постоянные магниты равномерно установлены по окружности вращающегося ротора, распределительный коллектор жестко соединен с ротором, токопроводящие пластины коллектора соединены друг с другом проводником, при этом каждая из токосъемных щеток состоит из двух частей, разделенных диэлетриком, а источник постоянного тока соединен с катушками электромагнитов.
2. Импульсно-инерционный электродвигатель по п.1, отличающийся тем, что токопроводящие пластины расположены по лучам промежутков между постоянными магнитами, при этом длина пластин соответствует промежутку между постоянными магнитами.
3. Импульсно-инерционный электродвигатель по п.1, отличающийся тем, что щетки токосъемников по длине соответствуют промежутку между пластинами коллектора.
4. Импульсно-инерционный электродвигатель по п.1, отличающийся тем, что количество токопроводящих пластин в распределительном коллекторе равно половине числа постоянных магнитов статора.
Инерционный двигатель с автономным приводом
Авторы патента:
Скрябин Вениамин Александрович
F03G3/08 — с маховиками
Использование: относится к автомобильному транспорту и предназначен для использования в качестве экологически чистой силовой установки автомобилей. Сущность изобретения: содержит супермаховик, кинематически связанный с выходным валом автономного привода, выполненного в виде детонационного двигателя внутреннего сгорания, содержащего по меньшей мере блок спаренных цилиндров с разделительными поршнями, образующими камеры сгорания с детонаторами и подпоршневые гидравлические полости, сообщенные при помощи магистралей рабочей жидкости между собой и гидротурбиной, установленной на выходной валу автономного привода, что дает возможность приводу, использующему детонационное горение топлива, раскручивая до высоких скоростей супермаховик, передавать большой запас энергии в короткий промежуток времени на ходу или стоянке для длительной бездымной и бесшумной работы инерционного двигателя в качестве силовой установки автомобиля. 1 ил.
1 ил.
Изобретение относится к автомобильному транспорту и предназначено для использования в качестве экологически чистой силовой установки автомобилей.
Известны инерционные силовые установки транспортных средств, содержащие двигатель и размещенный в корпусе маховик, вал которого установлен в подшипниках корпуса и кинематически связан с валом двигателя, что дает возможность при торможении кинетической энергии транспортного средства запасаться во вращающемся маховике, а при последующем разгоне упомянутая энергия возвращается на движитель. (авт. св. СССР N 1094982, кл. F 03 G 3/08, 30.05.84.).
Вышеназванная силовая установка отличается тем, что маховик установлен на сферическом основании с шарнирной сферической опорой для повышения надежности путем уменьшения вредных силовых воздействий силовой установки на систему управления транспортного средства.
Инерционные рекуперативные силовые установки используются на местности с затяжными подъемами и спусками, а в качестве двигателей автомобилей применения не нашли.
Целью изобретения является создание инерционного автомобильного двигателя с экологически чистой работой, обеспечивающего гибкую эксплуатацию автомобиля.
Поставленная цель достигается тем, что супермаховик (Термин «супермаховик», введенный проф. Д.В. Рабенхорстом, означает маховик, основной аккумулирующий элемент которого изготовлен из высокопрочных полимерных материалов, высокой энергоемкости, обусловленной большой удельной прочностью. Гулиа Н.В. Инерционные двигатели для автомобилей, 1974.) кинематически связанный с выходным валом автономного привода, выполненного в виде детонационного двигателя внутреннего сгорания, содержащего по меньшей мере блок спаренных цилиндров с разделительными поршнями, образующими камеры сгорания с детонаторами и подпоршневые гидравлические полости, сообщенные при помощи магистралей рабочей жидкости между собой и гидротурбиной, установленной на выходном валу автономного привода, что дает возможность приводу, использующему детонационное горение топлива, раскручивая до высоких скоростей супермаховик, передавать большой запас энергии на ходу или стоянке в короткий промежуток времени для длительной бездымной и бесшумной работы инерционного двигателя.
На чертеже представлена конструктивная схема инерционного двигателя с автономным приводом, представляющего собой комбинацию: 1 супермаховик с автономным приводом, представляющим собой детонационный двигатель внутреннего сгорания, содержащий по меньшей мере 2 блок спаренных цилиндров; 3 — форсунки; 4 детонаторы; 5 продувочные окна; 6 выхлопные окна; 7 — поршни; 8 сопла; 9 рабочую жидкость; 10 гидротурбину; 11 повышающий редуктор; 12 обгонную муфту.
Работа инерционного двигателя начинается с запуска привода, запуск детонационного двигателя начинается включением зажигания, в нижний цилиндр подается сжатый воздух, воздействующий на поршень, который при своем движении посредством рабочей жидкости 9 приводит в действие поршень 7, перекрывающий продувочные 5 и выхлопные 6 окна, создающий в цилиндре воздушную подушку, в которую через форсунку 3 впрыскивается топливо, создавая заряд горячей смеси, которая, воспламеняясь в детонаторе 4 предварительно полученной детонационной волной, инициирует детонацию всего заряда. Ударная волна через поршень 7, посредством рабочей жидкости 9, которая через сопло 8 скоростным напором приводит в действие турбину 10 и кинематически связанный с выходным валом супермаховик 1. Отдавая основную часть кинетической энергии турбине 10 для вращения супермаховика 1, рабочая жидкость 9 поступает в нижний цилиндр и весь процесс повторяется по двухтактному циклу.
Ударная волна через поршень 7, посредством рабочей жидкости 9, которая через сопло 8 скоростным напором приводит в действие турбину 10 и кинематически связанный с выходным валом супермаховик 1. Отдавая основную часть кинетической энергии турбине 10 для вращения супермаховика 1, рабочая жидкость 9 поступает в нижний цилиндр и весь процесс повторяется по двухтактному циклу.
Раскрутив турбиной 10 через повышающий редуктор 11 до высокой скорости супермаховик 1 привод заглушается до следующей зарядки, обгонная муфта 12 автоматически отключает привод от супермаховика 1, получившего большой запас энергии для экологически чистой работы инерционного двигателя.
Удельная энергоемкость супермаховика (по данным проф. Гулиа Н.В.) составляет 1,75105 кгсм/кг.
Скорость детонации углеводородных топлив достигает 3000 м/с, мощность топливного заряда определяется по формуле взрыва: где Q удельная теплота смеси, кКал m масса топливного заряда, кг 427 механический эквивалент D скорость детонации, м/с l длина камеры сгорания, м.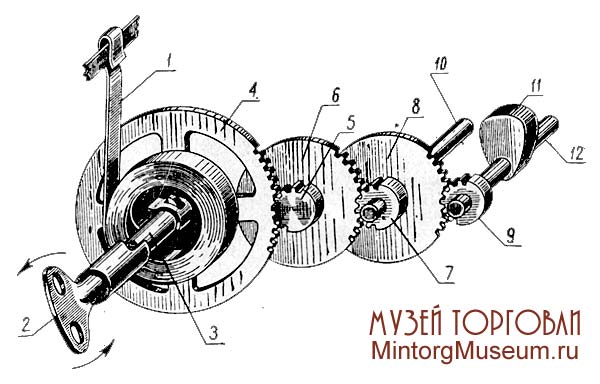
Формула изобретения
Инерционный двигатель с автономным приводом, содержащий супермаховик, кинематически связанный с выходным валом автономного привода, отличающийся тем, что автономным приводом служит детонационный двигатель внутреннего сгорания, содержащий по меньшей мере блок спаренных цилиндров с разделительными поршнями, образующими камеры сгорания с детонаторами и подпоршневые гидравлические полости, сообщенные при помощи магистралей рабочей жидкости между собой и гидротурбиной, установленной на выходном валу автономного привода.
РИСУНКИ
Рисунок 1
Похожие патенты:
Способ накопления механической энергии // 2070664
Инерционный движитель для транспортного средства // 2066398
Пружинный импульсный движитель // 2062354
Транспортное средство с маховичным движителем султанова а.з. // 2061904
Изобретение относится к движительным установкам, предназначенным для движения автомобильного, железнодорожного, водного и воздушного транспорта
Способ передвижения транспортного средства и устройство для его осуществления // 2047001
Изобретение относится к способу передвижения транспортных средств на воде, земле, под водой, в космическом пространстве
Инерционный центробежный двигатель // 2034170
Изобретение относится к машиностроению, конкретнее к автомобиле- и авиастроению и может быть использовано в качестве тяговой силовой установки и реверсивного тормоза на автомобилях, летательных аппаратах, индивидуальных транспортных средствах, приводимых в действие с помощью мускульной силы, а также при создании транспорта универсального типа на инерционной подвеске, движущегося по земле и в воздухе
Способ получения из гравитационного поля экологически чистой энергии, раскручивающей тело // 2000472
Инерционный пружинный двигатель // 1806292
Стенд для контроля качества инерционных механизмов // 1768799
Энергетическая установка // 1765487
Способ усиления мощности на валу электродвигателя // 2114497
Изобретение относится к машиностроению и к электромашиностроению
Способ поддержания вращения маховика и устройство для поддержания вращения маховика // 2126505
Изобретение относится к области механики и может быть использовано, в частности, в инерционных силовых установках с маховиками для привода транспортных средств
Движитель транспортного средства // 2131059
Изобретение относится к области транспортного машиностроения и ставит своей задачей повысить эффективность инерционно-импульсных движителей транспортных средств
Машина романова — механический атом 10 // 2137523
Силовая установка весенгириева // 2140565
Изобретение относится к области машиностроения и может быть использовано в качестве силовой установки для привода различных машин преимущественно в энергетике, в сельском хозяйстве и на водном транспорте
Способ управления транспортным средством с инерционным движителем и устройство для его осуществления // 2143585
Изобретение относится к области инерционных движителей (называемых в ряде случаев инерцоидами), которые могут использованы преимущественно для перемещения транспортных средств на опорах качения или скольжения с трением
Космический накопитель энергии // 2147090
Машина механический атом 14 // 2150983
Изобретение относится к плавающим механическим средствам, где при погружении в среду (воду) масса приобретает невесомость
Средство для передвижения «парадокс» // 2150984
Средство для создания двигателя-маховика // 2182259
Изобретение относится к области машиностроения, в частности к двигателестроению, и позволяет повысить кинетическую энергию, запасаемую устройством для его использования в качестве эффективного маховика
Пьезоинерционные приводы
- Дополнительный встроенный энкодер с разрешением 1 нм (10 нрад)
- Миниатюрные линейные и вращательные столики
- Немагнитный и совместимый с вакуумом принцип работы
- Самоблокирующийся в состоянии покоя, без тепловыделения
- Всего 18 мм в ширину и 10 мм в высоту
- Диапазон вращения >360°
- Скорость 70 °/с
- Крутящий момент 5 мН·м
- Подходит для вакуума до 10 -6 гПа, доступны версии до 10 -9 гПа
1 Пьезоэлектрический 90 инерционные приводы — это компактные и недорогие пьезоприводы с относительно высокими удерживающими усилиями и практически неограниченным диапазоном хода. Они используют эффект прерывистого скольжения (эффект инерции) — циклическое чередование статического и скользящего трения между бегунком и приводным элементом, создаваемое пьезоэлементом — для непрерывной подачи бегунка. Рабочая частота более 20 кГц позволяет напрямую приводить в движение бегунок со скоростью, превышающей 5 мм/с.
Они используют эффект прерывистого скольжения (эффект инерции) — циклическое чередование статического и скользящего трения между бегунком и приводным элементом, создаваемое пьезоэлементом — для непрерывной подачи бегунка. Рабочая частота более 20 кГц позволяет напрямую приводить в движение бегунок со скоростью, превышающей 5 мм/с.
Принцип инерционного привода основан на одном пьезоэлектрическом приводе, который управляется модифицированным пилообразным напряжением, генерируемым электроникой привода. Привод медленно расширяется и перемещает бегунок. Из-за своей инерции бегунок не может быстро сжиматься привода и остается на своем месте.
Приводной элемент, установленный сбоку от полозьев, обеспечивает прямолинейное или вращательное движение, а также очень компактную конструкцию предметного столика. В сочетании с подходящими инкрементными энкодерами возможны линейные и вращательные ступени шириной чуть более 20 мм и высотой всего 10 мм. Размеры еще меньше для работы в разомкнутом контуре без датчика.
По сравнению с тангенциальными приводами, стержневые приводы обеспечивают большую контактную поверхность между пьезокерамическим приводом и рабочим колесом. Это приводит к относительно высокому удерживающему усилию, достигающему 10 Н. Направляющая направляется через внутреннее отверстие привода, что по-прежнему обеспечивает очень компактную конструкцию привода. Штоковый привод используется в таких продуктах, как линейная ступень Q-545 с позиционным управлением шириной 45 мм или линейные приводы OEM N-412.
В отличие от прямых приводов, расширение приводов PiezoMike вызывает вращательное движение захвата. Поскольку захват зажимает винт с мелкой резьбой, результирующее движение затем поворачивает винт. Уменьшение резьбы позволяет создавать высокие удерживающие усилия до >100 Н при усилиях подачи >22 Н.
Линейные актуаторы PiezoMike
Компактный, недорогой инерционный привод (прерывистое скольжение). В состоянии покоя привод самоблокируется, не требует тока и не выделяет тепла. Удерживает положение с максимальной силой.
В состоянии покоя привод самоблокируется, не требует тока и не выделяет тепла. Удерживает положение с максимальной силой.
В фазе медленного управления (фаза заедания), когда направляющая перемещается, привод ведет себя так же, как классический пьезокерамический актуатор. Изменяя приложенное напряжение, привод может принимать любое положение и, таким образом, достигается высокое разрешение движения, характерное для пьезокерамики.
Вместе с инкрементным энкодером для измерения положения можно добиться высокой точности позиционирования и повторяемости движения на больших расстояниях перемещения.
Привод работает бесшумно на максимальной рабочей частоте 20 кГц. В состоянии покоя привод самоблокируется, не требует тока и не выделяет тепла. Удерживает положение с максимальной силой. Поэтому он особенно подходит для мобильных приложений с батарейным питанием и низкими значениями цикла нагрузки. Напряжение пьезоэлемента также зависит от типа привода. Для тангенциальных приводов оно ниже 48 В, для стержневых до 100 В..jpg)
Пьезоинерционные приводы основаны на экономичном решении с одним приводом. Управление простое и может быть даже интегрировано в существующую схему.
Характеристики упреждения во время фазы рывка и проскальзывания инерционного привода
Q-614 Миниатюрный вращающийся столик Q-Motion®
Минимальные размеры: диаметр поворотного стола 14 мм
Миниатюрные столики для позиционирования | Поставщик | Производитель
Другие
Руководство по выбору лучшего решения
Английский
Скачать
Белая книга
Срок службы, вакуумные приложения, износ
Английский
Немецкий
Скачать
Скачать
Как работают пьезодвигатели?
Существует четкая тенденция к тому, что пьезодвигатели все чаще используются в качестве альтернативы электродвигателям, а также в качестве технологии, позволяющей реализовать новые приложения. Это связано с тем, что сотрудники отдела исследований и разработок лучше знакомятся с технологией и ее преимуществами.
Это связано с тем, что сотрудники отдела исследований и разработок лучше знакомятся с технологией и ее преимуществами.
Вообще говоря, существует три типа пьезодвигателей. Наиболее распространенным типом является пьезодвигатель с импульсным приводом. Вторая категория состоит из пьезодвигателей шагового типа, также называемых шагающими пьезодвигателями, которые обычно используются для приложений с большими усилиями.
Третий тип — ультразвуковой или резонансный пьезодвигатель. Все три типа имеют свои преимущества и области применения, которые можно объяснить, более подробно изучив принцип их работы.
Пьезодвигатель с прерывистым скольжением (= инерционный пьезоэлектрический двигатель)
Рисунок 1 поясняет принцип работы пьезодвигателя с прерывистым скольжением. На верхнем рисунке, отмеченном цифрой «1», показаны различные компоненты типичного каскада пьезодвигателя с прерывистым скольжением. Он состоит из пьезоблока, закрепленного с одной стороны, точки контакта, ползуна (т. е. подвижной части) и подшипника.
е. подвижной части) и подшипника.
Рис. 1: Принцип работы прерывистого пьезодвигателя.
Во время «фазы прилипания», которая показана в состоянии 2, пьезоэлемент медленно расширяется из-за медленного увеличения напряжения. Ползун движется вместе с подвижной точкой контакта из-за силы трения между точкой контакта и ползунком. Затем пьезоактюатор быстро втягивается за счет подачи быстро уменьшающегося напряжения, см. состояние 3 на рис. 1. Из-за инерции ползунка он остается неподвижным, а точка контакта возвращается в исходное положение. Это называется «фазой проскальзывания» и приводит к чистому смещению ползунка. Повторяя эти два шага, реализуется макроскопическое движение.
Очень похожий тип пьезодвигателя называется «инерционным» пьезодвигателем. Хотя управляющие сигналы идентичны принципу прерывистого скольжения, инерционный двигатель не имеет точки контакта с проскальзыванием. Дополнительную информацию об этом типе двигателя можно найти в «Пьезоэлектрические инерционные двигатели — критический обзор истории, концепций, дизайна, приложений и перспектив» (Hunstig, 2017).
Характеристики:
Воздействие на ступень, происходящее в фазе скольжения, вызывает возбуждение динамики системы. это генерирует вибрации и шум . Шум может быть очень раздражающим, а иногда даже вызывать проблемы со здоровьем, особенно когда людям приходится работать рядом с устройством. Ударный приводной механизм также вызывает значительный износ контактных материалов , что обычно ограничивает срок службы ступеней этого типа. Для прерывистого двигателя характерна минимальная величина шага при движении и добиться высокой повторяемости практически невозможно, так как величина шага зависит от многих условий работы (например, от направления движения). Некоторые двигатели с прерывистым скольжением используют режим сканирования постоянного тока для достижения очень высокого разрешения. Хотя это эффективно для выполнения точного позиционирования, оно становится равным 9.0093 невозможно поддерживать стабильное конечное положение на уровне нанометров с дрейфом нуля или без включения двигателя. Скорость большинства обычных прерывистых пьезодвигателей ограничена примерно 20 мм/с. Исследователи из Падерборнского университета в Германии написали обзорную статью, в которой представлен более подробный обзор всех коммерчески доступных прерывистых и инерционных пьезодвигателей. (Hunstig, 2017)
Скорость большинства обычных прерывистых пьезодвигателей ограничена примерно 20 мм/с. Исследователи из Падерборнского университета в Германии написали обзорную статью, в которой представлен более подробный обзор всех коммерчески доступных прерывистых и инерционных пьезодвигателей. (Hunstig, 2017)
Шаговый пьезодвигатель (= шагающие пьезоэлементы или пьезоножки)
Основной принцип работы этого типа пьезодвигателя объясняется в
Рис. 2.
Рис. 2: Принцип работы шагового пьезодвигателя.
Типовой шаговый пьезодвигатель состоит как минимум из трех пьезоприводов. Некоторые приводы находятся в контакте с ползунком (например, приводы A и B на рисунке 2) и действуют как зажимной механизм, в то время как другие используются для создания поступательного движения ползуна (например, пьезоэлектрические приводы C на рисунке 2).
В состоянии покоя оба пьезоэлемента A и B соприкасаются с ползунком. Во время начала цикла движения, которое показано в состоянии 1 на рисунке 2, пьезоэлемент A втягивается, а пьезоэлемент B расширяется. Только точка контакта пьезоэлемента B остается в контакте с ползунком.
Только точка контакта пьезоэлемента B остается в контакте с ползунком.
Пьезоэлемент C расширяется для реализации поступательного движения ползунка через контакт пьезоэлемента B, который показан в состоянии 2.
Затем пьезоэлемент A выдвигается, а пьезоэлемент B втягивается. Теперь только пьезоэлемент A находится в контакте с ползунком, см. состояние 3.
Затем пьезоэлемент C отводится в исходное положение, что приводит к состоянию номер 4.
Наконец, пьезоэлемент B снова выдвигается, а пьезоэлемент A втягивается, восстанавливая начальные условия первого состояния.
Характеристики:
Из-за различных шагов в механизме перемещения пьезошаговый двигатель обычно достигает низких скоростей перемещения (т.е. < 10 мм/с) . Кроме того, при шагании контакты изнашиваются, как и при любом фрикционном контакте. Однако пьезо-шаговый двигатель особенно подвержен износу , поскольку для хорошей работы требуются строгие допуски. Причиной этого является малый ход пьезоприводов, которые необходимо тщательно выровнять друг относительно друга. Поэтому пьезошаговые двигатели обычно обеспечивают меньший срок службы, чем у других типов пьезодвигателей . Хорошо известная и удачная конфигурация пьезошагового двигателя имеет четыре «ноги», но всего этот двигатель состоит из 8 различных пьезоприводов. Из-за большого количества пьезоэлементов и требуемых строгих допусков этот тип двигателя на дороже, чем прерывистое и ультразвуковое пьезодвигатели .
Причиной этого является малый ход пьезоприводов, которые необходимо тщательно выровнять друг относительно друга. Поэтому пьезошаговые двигатели обычно обеспечивают меньший срок службы, чем у других типов пьезодвигателей . Хорошо известная и удачная конфигурация пьезошагового двигателя имеет четыре «ноги», но всего этот двигатель состоит из 8 различных пьезоприводов. Из-за большого количества пьезоэлементов и требуемых строгих допусков этот тип двигателя на дороже, чем прерывистое и ультразвуковое пьезодвигатели .
Ультразвуковой резонансный пьезодвигатель (со стоячей волной)
В этом типе пьезодвигателя движение ползуна создается эллиптическими колебаниями точки контакта. Существует два типа ультразвуковых пьезодвигателей: ультразвуковой пьезодвигатель со стоячей волной и бегущей волной. В двигателе с бегущей волной точка (точки) контакта смещается (точки) вдоль направления движения, постоянно толкая ползунок вперед. Двигатель со стоячей волной, напротив, имеет одну (или несколько) определенных контактных точек. Эти контактные точки вибрируют по эллиптической траектории относительно ползуна, что приводит к чистому смещению. Хотя пьезодвигатели с бегущей волной развивают высокие усилия, они подвержены износу и имеют ограниченный срок службы. Поэтому в этой статье основное внимание уделяется пьезодвигателю со стоячей волной, который является основной компетенцией Xeryon.
Двигатель со стоячей волной, напротив, имеет одну (или несколько) определенных контактных точек. Эти контактные точки вибрируют по эллиптической траектории относительно ползуна, что приводит к чистому смещению. Хотя пьезодвигатели с бегущей волной развивают высокие усилия, они подвержены износу и имеют ограниченный срок службы. Поэтому в этой статье основное внимание уделяется пьезодвигателю со стоячей волной, который является основной компетенцией Xeryon.
В случае типа стоячей волны движение точки контакта усиливается, поскольку частота колебаний совпадает с двумя резонансными частотами конструкции двигателя. На рис. 3 показан пример резонансных режимов ультразвукового пьезодвигателя, который был разработан основателями Xeryon в университете Левена в Бельгии [2]. В первом резонансном режиме точка контакта движется в тангенциальном направлении, т.е. в направлении движения. Этот режим иногда называют «режимом изгиба». Во втором резонансном режиме, называемом «нормальным режимом», контакт вибрирует перпендикулярно направлению движения.
Рисунок 3: Резонансные режимы ультразвукового пьезодвигателя со стоячей волной
Благодаря тщательному выбору электрических управляющих сигналов пьезодвигателя оба режима возбуждаются одновременно с разницей фаз плюс или минус 90 градусов. Это приводит к эллиптической вибрации точки контакта, как показано на рисунке 4. Помимо разности фаз, траекторией движения точки контакта также можно управлять с помощью амплитуды или частоты управляющих сигналов.
Рисунок 4: Эллиптическая вибрация точки контакта ультразвукового пьезодвигателя.
Характеристики:
Эллиптическая траектория точки контакта может быть сформирована таким образом, чтобы иметь очень маленькую горизонтальную амплитуду, в результате чего небольшой горизонтальный вклад движения . Это приводит к очень точному разрешению позиционирования без необходимости дополнительного квазистатического режима сканирования (который обычно используется в пьезодвигателях с прерывистым скольжением для достижения нанометрового разрешения). Преимущество заключается в том, что ультразвуковой пьезодвигатель имеет дрейф нуля после позиционирования 9.0094 и обеспечивает хорошую двунаправленную повторяемость положения .
Преимущество заключается в том, что ультразвуковой пьезодвигатель имеет дрейф нуля после позиционирования 9.0094 и обеспечивает хорошую двунаправленную повторяемость положения .
Кроме того, стратегия управления формированием эллиптической траектории позволяет следовать низкой, но постоянной скорости сканирования ползунка. Термин «ультразвук» означает, что частота колебаний находится за пределами слышимого для человека диапазона частот. Это объясняет, почему эти двигатели работают бесшумно , что является большим преимуществом, когда операторы работают вблизи системы, такой как оптический микроскоп. Кроме того, из-за высокой частоты операций можно достичь очень высокая скорость движения от 100 мм/с с ультразвуковым пьезодвигателем. Низкое энергопотребление и, следовательно, низкое тепловыделение этого типа двигателя объясняется его работой в резонансе, что энергетически более выгодно, чем квазистатическая работа.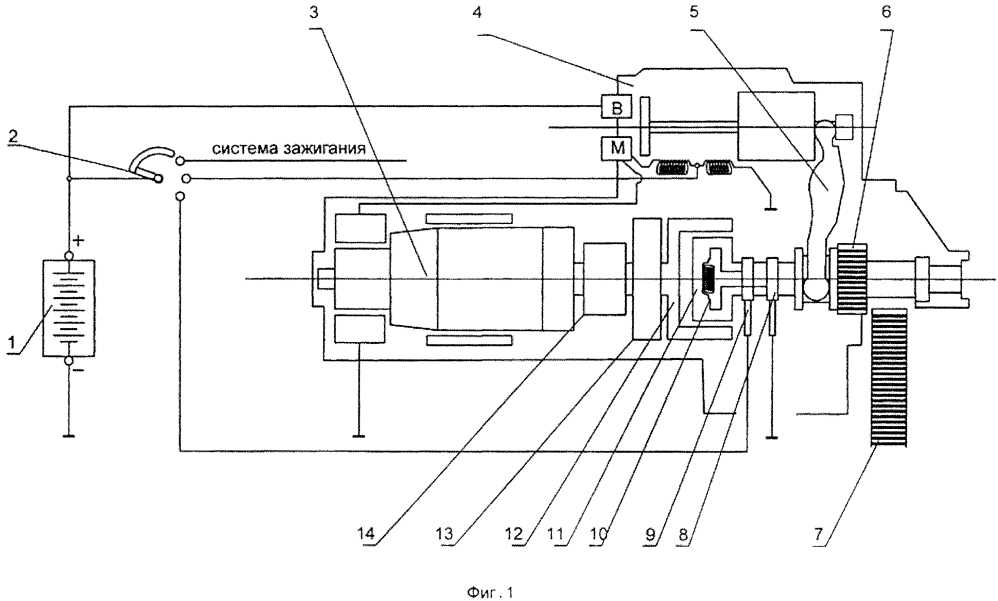 Это важно для портативных устройств и систем, которые должны быть термически стабильными , таких как вакуумные установки или измерительные устройства.
Это важно для портативных устройств и систем, которые должны быть термически стабильными , таких как вакуумные установки или измерительные устройства.
Наконец, эти двигатели можно использовать для покрытия большие расстояния и длительный срок службы при использовании в надлежащих условиях. Это объясняется меньшим воздействием между точкой контакта и ползунком по сравнению с пьезодвигателями прерывистого скольжения.
Характеристики различных типов пьезодвигателей
В таблице 1 приведены различные характеристики трех основных типов пьезодвигателей, описанных выше.
| Ультразвуковой пьезоэлектрический | Пьезоэлектрический прерывистый (инерционный) | Шаговый пьезоэлектрический (шагающий пьезоэлектрический) | |
|---|---|---|---|
| Скорость | 1000 мм/с | 1–3 мм/с | 10–20 мм/с |
| Усилие* | 1–5 Н | 1–10 Н | 5–20 Н |
| Разрешение | 1 нм | 1 нм | |
| Диапазон хода | 1 — 300 мм | 1 — 50 мм | 1 — 50 мм |
| Срок службы | 200–300 км | 10–20 км | 50–100 км |
| Вибрации/шум | вибрации > 20 кГц (бесшумно) | вибрации | вибрации |
| Постоянная скорость | плавная (мкм/с) | пилообразный профиль | малые импульсы от шага |
| Энергопотребление | низкое | среднее | среднее |
* Это мощность одного двигателя сопоставимого размера (~ 1 см³).