Содержание
Турбовальный двигатель | Техника и человек
Для тех, кто интересуется моторами в целом и их авиационными моделями в частности, турбовальный двигатель в первую очередь ассоциируется с вертолетами, недаром их называют «вертолетными ГТД». Именно здесь ТВаД нашли наибольшее применение и уже не один десяток лет с успехом используются. Но вертолеты – не предел их возможностей, многие другие отрасли машино- и судостроения взяли на вооружение этот тип двигателей, но обо всем по порядку.
Итак, турбовальный двигатель принадлежит славному семейству газотурбинных двигателей (ГТД) наравне с турбореактивными (ТРД) и турбовинтовыми (ТВД). ГТД представляет собой тепловую машину, в упрощенной схеме состоящую из компрессора и турбины, работающей за счет сжигания топлива в камере сгорания. Наиболее простой его разновидностью является турбореактивный двигатель, в котором энергия от сжигания топлива идет только на вращение компрессора через турбину, а излишек энергии выходит через сопло в виде газов под высоким давлением, образуя реактивную тягу. Но эта энергия может не только «вылетать в трубу», но и выполнять полезную работу, вращая воздушный винт (турбовинтовой двигатель) или вал (турбовальный двигатель). Это и является принципиальной разницей между всеми вышеотмеченными видами моторов семейства ГТД – способ использования свободной энергии.
Но эта энергия может не только «вылетать в трубу», но и выполнять полезную работу, вращая воздушный винт (турбовинтовой двигатель) или вал (турбовальный двигатель). Это и является принципиальной разницей между всеми вышеотмеченными видами моторов семейства ГТД – способ использования свободной энергии.
Устройство и принцип работы двигателя
Строение турбовального двигателя в общих чертах напоминает строение ТРД. Основными составляющими являются комрессор, турбина, камера сгорания и вал. В отличие от других газотурбинных двигателей ТВаД совсем не имеет реактивной тяги – вся свободная энергия расходуется на вращение вала, поэтому и сопла, как такового, у него нет, а есть только каналы (своеобразные выхлопные трубы), по которым отводятся отработанные газы. Еще одна особенность ТВаД – наличие не одной, а двух турбин, не связанных между собой механически. Одна турбина приводит в движение компрессор, а вторая – рабочий вал. Между собой они связаны газодинамически. Некоторые модели турбовинтовых двигателей также имеют схожую конструкцию, но не обязательно. В случае с ТВаД турбин всегда две.
В случае с ТВаД турбин всегда две.
Две основные схемы устройства ТВаД с описание расположенных механизмов. Картинки кликабельны.
Принцип работы турбовального двигателя тоже не сильно отличается от ТРД или ТВД. Компрессор, приводимый в движение турбиной, нагнетает воздух в камеру сгорания, где он перемешивается с впрыснутым через форсунки топливом. Топливный заряд воспламеняется и сгорает, в результате чего образуются газы с большим запасом энергии. Расширяясь, они вращают турбины, приводя в движение компрессор и вал, а отработанные газы выводятся наружу.
Компрессор турбовального двигателя имеет несколько ступеней и может быть центробежным, осевым или комбинированным. Комбинированные компрессоры сочетают в себе и центробежные, и осевые ступени.
Обязательным конструктивным элементом ТВаД, как, впрочем, и турбовинтового двигателя, является редуктор, установленный между турбиной и валом. Сама турбина вращается с угловой скоростью, достигающей 20 000 об/мин.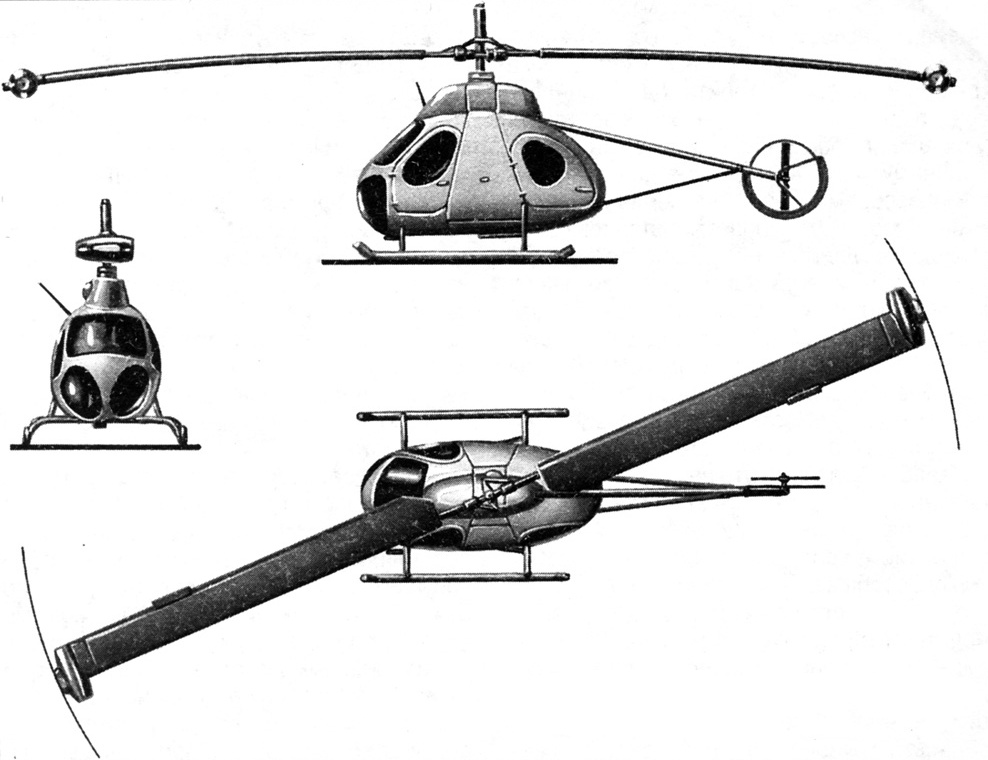 Понятно, что винт, закрепленный на валу и создающий тягу, не сможет работать при такой скорости и выполнять свои функции, ведь тогда ему придется вращаться со сверхзвуковой скоростью. Редуктор, установленный перед валом, понижает обороты и увеличивает крутящий момент, так что скорость вращения лопастей винта вертолета значительно меньше скорости вращения турбины.
Понятно, что винт, закрепленный на валу и создающий тягу, не сможет работать при такой скорости и выполнять свои функции, ведь тогда ему придется вращаться со сверхзвуковой скоростью. Редуктор, установленный перед валом, понижает обороты и увеличивает крутящий момент, так что скорость вращения лопастей винта вертолета значительно меньше скорости вращения турбины.
Если турбовинтовые двигатели, которые используются на самолетах, должны иметь компактные размеры, а вал турбины и вал винта у них устанавливаются параллельно в одном корпусе, то к габаритам турбовальных двигателей таких жестких требований нет. Рабочий вал у них может находиться впереди турбины или за ней, в одном корпусе с ней или отдельно. Это объясняется тем, что мотор спрятан в конструкции кабины, где его можно расположить в любом удобном положении. Различают цельные моторы и модульные, состоящие из отдельных модулей, связанных между собой механически. Часто в одном модуле расположены компрессор и турбины, а в другом – рабочий вал, связанный с валом турбины редуктором.
Легкий американский вертолет AH-6j Little Bird
Применение
Нашел себе применение турбовальный двигатель и на земле. Правильнее даже говорить, что именно на земле он изначально и использовался, и только после появления авиации, как таковой, «переселился» на небо. Его можно встретить и на транспорте, и на различных магистральных станциях, где он обычно используется, как альтернатива дизельного двигателя. В сравнении с дизелем ТВД более легкий по весу, менее шумный и более мощный, если брать двигатели одного размера.
В промышленности и народном хозяйства
ТВаД успешно используется в качестве нагнетателя природного газа на газоперекачивающих станциях. Его нередко можно увидеть на крупных газовых магистралях. Одна из последних разработок газовая турбина T16, мощностью 16 МВт. Короткое видео с применением турбовального двигателя в электроэнергетики.
Основные показатели:
- 16,5 МВт — мощность на валу.

- 37% — КПД, механический привод.
- 36% — КПД, электрический (простой цикл).
- 80% — КПД, комбинированное производство электроэнергии и тепла
- 200 000 часов — полный жизненный цикл
- выбросы NOx — не более 25 ppm.
Турбовальные двигатели используются в мобильных электростанциях для привода генератора. Электростанции с данным двигателем занимают меньший объем, аналогичной электростанции с традиционными двигателями.
В транспортной сфере
Несмотря на то, что в большинстве случаев турбовальные двигатели описываются, как силовые установки вертолетов, их применение не ограничено только ими. Частенько ТВаД играет роль не основного движителя, а вспомогательной установки. Такими установками обычно оснащаются самолеты, а используются они для питания энергией основных систем судна при его наземном обслуживании. То есть, когда самолет находится на земле, не обязательно запускать его основные моторы для получения электричества или создания давления в гидросистемах, для этого достаточно запуска такой небольшой установки. Также ТВаД используется в качестве пускового агрегата, который проворачивает ротор турбины при запуске. В этом случае он имеет название турбостартер.
Также ТВаД используется в качестве пускового агрегата, который проворачивает ротор турбины при запуске. В этом случае он имеет название турбостартер.
Вид железнодорожного транспорта, на который устанавливается ТВаД, носит название газотурбовоз. Принцип его работы заключается в том, что турбовальный двигатель вращает вал генератора, вырабатывающего электрический ток. Ток поступает на электромоторы, которые, по сути, и являются основной силовой установкой. История газотурбовозов началась в 60-е годы, когда были сконструированы первые опытные образцы, правда, потом они уступили место более известным сейчас электровозам. Вместе с тем с 2007 года возобновились работы по созданию газотурбовозов, и даже был создан пробный экземпляр, работающий на сжиженном газе. Его испытания прошли успешно, так что в скором будущем, возможно, он будет выпускаться серийно.
Не обошли стороной ТВаД и создатели военной наземной техники. Некоторые танки, в том числе и отечественный Т-80 и американский М1 Abrams, оснащены ТВаД. Короткое видео разработки, внедрения и применения турбовального двигателя на танке.
Короткое видео разработки, внедрения и применения турбовального двигателя на танке.
Турбовальные двигатели также используются и на водном транспорте, называемом газотурбоходами. К ним относятся суда на воздушной подушке или на подводных крыльях. Наиболее известным отечественным газотурбоходом является военное судно «Зубр» — наиболее крупный десантный корабль на воздушной подушке. Этот гигант известен далеко за пределами России и является мировым рекордсменом среди суден на воздушной подушке по своим габаритам. А вот с отечественными пассажирскими газотурбоходами как-то не сложилось. Судно «Циклон», сконструированное в 80-хх годах, не пережило перестройки и со временем забылось, а новые пассажирские суда, оснащенные ТВаД пока не появились.
Танк Т-80 с газотурбинным двигателем
Десантное судно «Зубр»
Преимущества и недостатки
Основным преимуществом турбовального двигателя является то, что по сравнения с поршневыми двигателями он более легкий по весу, менее шумный и более мощный, если брать двигатели одного размера. Вся суть турбовального двигателя и заключается, чтоб максимально использовать энергию сгорающего топлива, по сравнению с поршневыми двигателями это реализуется лучшим образом. Тем самым в одном килограмме двигателя можно реализовать конструкцию, более мощную своих цилиндрических сородичей, которая с каждого килограмма топлива будет забирать тепловую энергию и преобразовывать ее в механическую.
Вся суть турбовального двигателя и заключается, чтоб максимально использовать энергию сгорающего топлива, по сравнению с поршневыми двигателями это реализуется лучшим образом. Тем самым в одном килограмме двигателя можно реализовать конструкцию, более мощную своих цилиндрических сородичей, которая с каждого килограмма топлива будет забирать тепловую энергию и преобразовывать ее в механическую.
Есть у турбовального двигателя и недостатки. Первый из них – сравнительно большой расход топлива и, соответственно, низкий КПД, несмотря на высокие показатели мощности. Именно этот недостаток объясняет его ограниченное применение на наземном транспорте, где его можно заменить более эффективными силовыми установками. Второй недостаток – чувствительность к загрязнениям. Компрессор, втягивая воздух в камеру сгорания, заодно всасывает и пыль, и посторонние предметы, что сказывается на качестве работы двигателя и на его исправность в целом. На высоких оборотах даже незначительные твердые частички могут повредить лопасти турбины. Поэтому ТВаД нуждается в надежной системе тщательной очистки воздуха, а расходы на нее далеко не всегда оправданы – в большинстве случаев намного проще и дешевле использовать традиционный дизель. Это еще одна причина, по которой эти двигатели в основном используются в воздухе: там и грязи меньше, и птицы летают ниже высоты полета, так что нормальной работе компрессора и турбины ничего не мешает. Зато масса ТВаД намного меньше любого поршневого двигателя, а это в авиации немаловажно.
Поэтому ТВаД нуждается в надежной системе тщательной очистки воздуха, а расходы на нее далеко не всегда оправданы – в большинстве случаев намного проще и дешевле использовать традиционный дизель. Это еще одна причина, по которой эти двигатели в основном используются в воздухе: там и грязи меньше, и птицы летают ниже высоты полета, так что нормальной работе компрессора и турбины ничего не мешает. Зато масса ТВаД намного меньше любого поршневого двигателя, а это в авиации немаловажно.
Турбовальные двигатели – это действительно в первую очередь «сердца» вертолетов, а уж потом все остальное. Именно эти стальные «стрекозы» дают возможность оценить основные преимущества ТВаД, ну а недостатки в этом случае совсем незначительны.
как устроен вертолет с одной лопастью
В 2011 году по СМИ пронеслась новость о разработке Ульриха, Пайнса и Хамберта из университета Мэриленда – роботе-вертолете с одной лопастью, летающем по принципу кленового семечка. Интересно, что разработка эта не уникальна. Монокоптеры – это целый класс летательных аппаратов, придуманный более ста лет назад и получивший сегодня второе дыхание.
Монокоптеры – это целый класс летательных аппаратов, придуманный более ста лет назад и получивший сегодня второе дыхание.
Андрей Соколов
Многие из нас в детстве запускали кленовые крылатки с балкона. Вместо того чтобы падать вертикально вниз, такой плод планирует, быстро вращаясь, точно вертолетный винт. Этот эффект основан на удлиненном сухом околоплоднике, аэродинамические свойства которого сходны со свойствами лопасти пропеллера. Конечно, глядя на крылатку, человек не мог не подумать: надо применить этот принцип в механике!
Правда, практика показала — что хорошо для природы, то совершенно не обязательно хорошо для рукотворной техники. Так или иначе, 14 января 1910 года французские инженеры Альфонс Папен и Дидье Руилли представили перед Французской академией наук проект летательного аппарата, формой и принципом действия напоминавшего крылатку белого клена. На заре авиастроения интерес к оригинальным проектам был весьма велик, поскольку предсказать, какой из многочисленных воздухоплавательных принципов «сработает», было довольно трудно. В итоге уже годом позже Папен и Руилли получили финансирование от военных, поскольку армия всегда первой подхватывала перспективные проекты, — и принялись за дело.
В итоге уже годом позже Папен и Руилли получили финансирование от военных, поскольку армия всегда первой подхватывала перспективные проекты, — и принялись за дело.
Траектория куколки
Природная задача крылатки достаточно проста. Замедление падения и сложность траектории позволяют семени-вертолету улетать значительно дальше от материнского дерева, нежели, например, желудю или каштану. Зачем это нужно в технике? Ведь стабилизировать траекторию полета монокоптера невероятно трудно, поскольку лопастью в нем служит весь корпус. Плюс ко всему, если монокоптер несет на себе человека, необходимо каким-то образом обеспечить неподвижность кабины и достаточную стабильность аппарата при нахождении в воздухе. В общем, задача кажется нетривиальной, значительно более сложной, нежели в случае с вертолетом обычной схемы.
Тем не менее неоспоримые плюсы у монокоптеров есть. Во-первых, они, подобно автожирам, не упадут на землю при отказе двигателя, а спланируют на авторотации. Во-вторых, монокоптер состоит из очень небольшого количества элементов, причем подвижных среди них — раз, два и обчелся, и потому его надежность весьма высока; даже столкновение с другим летательным аппаратом и легкие повреждения, нанесенные корпусу-крылу, позволят монокоптеру пролететь еще некоторое расстояние, например, до базы. На последнее преимущество и купились французские военные.
Во-вторых, монокоптер состоит из очень небольшого количества элементов, причем подвижных среди них — раз, два и обчелся, и потому его надежность весьма высока; даже столкновение с другим летательным аппаратом и легкие повреждения, нанесенные корпусу-крылу, позволят монокоптеру пролететь еще некоторое расстояние, например, до базы. На последнее преимущество и купились французские военные.
Творение Папена и Руилли получило название Chrysalide («Куколка»), а сам класс аппаратов, защищенный двумя европейскими и одним американским патентами, — Gyroptere (гироптер). Странный вертолет имел одну огромную полую лопасть длиной 17 м и по конфигурации был практически один в один скопирован с кленовой крылатки. Лопасть располагалась с одной стороны от кабины пилота, с другой она уравновешивалась силовым агрегатом, 9-цилиндровым ротативным двигателем Rhone мощностью 80 л.с. — для того времени очень немало.
Собственно, кроме звездообразного ротативного двигателя, другого варианта не было: в таком агрегате цилиндры вместе с картером вращаются вокруг неподвижного коленчатого вала. Rhone «выдавал» 1200 об/мин и вращал вентилятор, нагнетавший внутрь лопасти воздух. Из выгнутого конца лопасти струя выходила со скоростью порядка 100 м/с, приводя весь аппарат во вращение. Пилот «Куколки» располагался в центре масс между крылом и вентилятором — это позволяло стабилизировать его положение. Направление полета задавалось воздушной струей: часть нагнетаемого воздуха отводилась в поворотный воздухопровод, соединенный с рулем.
Rhone «выдавал» 1200 об/мин и вращал вентилятор, нагнетавший внутрь лопасти воздух. Из выгнутого конца лопасти струя выходила со скоростью порядка 100 м/с, приводя весь аппарат во вращение. Пилот «Куколки» располагался в центре масс между крылом и вентилятором — это позволяло стабилизировать его положение. Направление полета задавалось воздушной струей: часть нагнетаемого воздуха отводилась в поворотный воздухопровод, соединенный с рулем.
Так или иначе, к 1913 году «Куколку» построили, хотя проблем оказалось множество: в частности, технологии того времени не позволяли обеспечить достаточную прочность конструкции, да и положение пилота оказалось не столь стабильным, как следовало из расчетов. Плюс ко всему началась Первая мировая война, и полевые испытания сумели провести лишь 31 марта 1915 года на небольшом озере в департаменте Кот д’Ор.
Вдобавок ко всему прочему оказалось, что мощности мотора катастрофически не хватает — монокоптер вращался с частотой всего 47 об/мин, хотя по расчетам для взлета требовалось как минимум 60 об/мин. Закончилось испытание печально: пилота начало закручивать и трясти, он сумел каким-то образом спрыгнуть в воду, после чего «Куколка» заглохла, перевернулась — и затонула, несмотря на то что ее основанием был полый поплавок.
Закончилось испытание печально: пилота начало закручивать и трясти, он сумел каким-то образом спрыгнуть в воду, после чего «Куколка» заглохла, перевернулась — и затонула, несмотря на то что ее основанием был полый поплавок.
К несчастью, при испытаниях присутствовала военная комиссия, то есть представители «спонсора». Средства были отозваны, а разработку рекомендовали прекратить. В военное время стране было не до экзотики, Папен и Руилли трудились на благо отечества в совершенно других областях. Впрочем, «Куколку» инженеры из озера подняли, а в 1917 году представили новый проект облегченного гироптера — правда, денег на его создание правительство уже не выделило. Поиски финансирования незадачливые изобретатели продолжали аж до 1936 года.
Кому нужен монокоптер?
Но даже если бы на «Куколку» был установлен более мощный двигатель (как и планировалось изначально), даже если бы она взлетела — вряд ли монокоптеры нашли бы свою нишу в мировом авиастроении. Авиационный бум 1910-х годов позволил прогрессу идти семимильными шагами: уже к концу Первой мировой войны армии всех воюющих государств были оснащены самолетами, достаточно совершенными и скоростными, чтобы творение Папена и Руилли осталось лишь историческим курьезом.
Авиационный бум 1910-х годов позволил прогрессу идти семимильными шагами: уже к концу Первой мировой войны армии всех воюющих государств были оснащены самолетами, достаточно совершенными и скоростными, чтобы творение Папена и Руилли осталось лишь историческим курьезом.
Казалось, возвращаться к схеме крылатки нет никакого смысла. Слишком громоздкая и сложная конструкция с невысокой грузоподъемностью может служить разве что для наблюдения, но сегодня эту функцию повсеместно выполняют дроны… Стоп! Дроны? А это идея!
Действительно, если полноразмерный монокоптер, обязанный выдерживать человека, оказывается чрезмерно неудобным и ненадежным, то для крошечного дрона-наблюдателя подобная схема кажется чуть ли не оптимальной. Если сравнять размеры робота с размерами прототипа — кленового плода, то окажется, что у беспилотных монокоптеров очень неплохое будущее. В 2006 году, спустя почти век после французов, об этом задумались специалисты компании Lockheed Martin.
Маленькие машинки
Конечно, во всем замешано агентство DARPA — кто же еще! 10 июля 2006 года было объявлено, что Lockheed Martin получили неплохой грант на разработку монокоптера в рамках программы nano air vehicle (NAV). Итоговая конструкция по техзаданию должна весить не более 20 г и иметь не более 15 см по максимальному размеру; кроме того, заказчики из DARPA указали и минимальную скорость наноразведчика — 36 км/ч, что кажется откровенно фантастическим. Изначальный прототип, рассчитанный на компьютере, действительно имел размеры кленовой крылатки — 5-сантиметровая лопасть и крошечный реактивный двигатель, вращающий устройство с частотой порядка 15 000 об/мин. Плюс, конечно, оборудование: сенсоры, камеры, коммуникационное устройство, и все это каким-то чудесным образом вмещается в систему, суммарная масса которой составляет всего 10 г.
Но время шло, а сделать расчетную конструкцию в пластике не получалось. В итоге монокоптер Lockheed Martin проиграл конкуренту — устройству под названием Nano Hummingbird (то есть «колибрилету»), созданному в рамках того же заказа компанией AeroVironment. 19-граммовая законченная модель махолета, «срисованного» с колибри, была представлена зимой 2011 года, в то время как монокоптер до сих пор находится в разработке. На сегодняшней стадии длина его лопасти достигла 17 см; правда, на выставках чаще всего демонстрировался более крупный экземпляр с 40,6-сантиметровым крылом; на нем тестируется и система управления.
В итоге монокоптер Lockheed Martin проиграл конкуренту — устройству под названием Nano Hummingbird (то есть «колибрилету»), созданному в рамках того же заказа компанией AeroVironment. 19-граммовая законченная модель махолета, «срисованного» с колибри, была представлена зимой 2011 года, в то время как монокоптер до сих пор находится в разработке. На сегодняшней стадии длина его лопасти достигла 17 см; правда, на выставках чаще всего демонстрировался более крупный экземпляр с 40,6-сантиметровым крылом; на нем тестируется и система управления.
Впервые дрон от Lockheed Martin, получивший в итоге название Samarai, был показан в августе 2011 года на выставке AUVSI (Международной ассоциации конструкторов беспилотников). Запросы DARPA пока что остались невыполненными: в придачу к чрезмерной длине дрон еще и весит 227 г, хотя камеру держит вполне исправно. Реактивный двигатель в итоге заменили электрическим — с пропеллером, расположенным на законцовке лопасти.
Но пока Lockheed Martin бьется над непростой задачей, троица независимых инженеров из Мэрилендского университета построила свой дрон-монокоптер The Ulrich Flyer (или иначе — Robotic Samara, окончательного названия еще нет). Точнее, целых три дрона, последний из которых имеет всего лишь 7,5-сантиметровое крыло, — кажется, у ребят из Lockheed Martin серьезные проблемы в плане конкуренции. Надо сказать, Ульрих и компания работали над монокоптером тоже достаточно давно, с 2007 года. Принцип работы The Ulrich Flyer такой же, как и у Lockheed Martin Samarai, то есть имеется крыло в форме крылатки и импеллер на его законцовке. Вот только у мэрилендцев получилось (почти — по крайней мере по размерам) вложиться в технические требования заказчика.
Точнее, целых три дрона, последний из которых имеет всего лишь 7,5-сантиметровое крыло, — кажется, у ребят из Lockheed Martin серьезные проблемы в плане конкуренции. Надо сказать, Ульрих и компания работали над монокоптером тоже достаточно давно, с 2007 года. Принцип работы The Ulrich Flyer такой же, как и у Lockheed Martin Samarai, то есть имеется крыло в форме крылатки и импеллер на его законцовке. Вот только у мэрилендцев получилось (почти — по крайней мере по размерам) вложиться в технические требования заказчика.
Дроны-наблюдатели, сделанные по схеме монокоптера, хороши тем, что в них практически нечему ломаться. Кроме крошечного электродвигателя с пропеллером, в них нет ничего подвижного. Правда, до сих пор стоит проблема стабильного управления монокоптерами — но если DARPA и впредь будет выделять миллионы долларов на подобные разработки, нет сомнений, что ученые преодолеют все барьеры.
Беспилотникам — дорогу!
Сегодня ничто не указывает на какие-либо перспективы для пилотируемых монокоптеров. Попытка Папена и Руилли была очень неплоха для 1910-х — но, видимо, навсегда отбила у инвесторов желание вкладывать средства в подобные проекты. Тестовый вертолет Bolkow Bo-103 был создан в 1960 году только для тестирования стеклопластикового профиля лопасти — никак не для серии. А вот беспилотники имеют все шансы серьезно обосноваться на современном рынке военных дронов-наблюдателей.
Попытка Папена и Руилли была очень неплоха для 1910-х — но, видимо, навсегда отбила у инвесторов желание вкладывать средства в подобные проекты. Тестовый вертолет Bolkow Bo-103 был создан в 1960 году только для тестирования стеклопластикового профиля лопасти — никак не для серии. А вот беспилотники имеют все шансы серьезно обосноваться на современном рынке военных дронов-наблюдателей.
Дроны-монокоптеры всегда казались интересной концепцией. Известен ряд разработок Чарльза Маккатчена, строившего подобные модели в 1950-х; впоследствии монокоптеры строили моделисты из СССР, Румынии, США, в 1988 году моделист Кори Клайн первым сконструировал монокоптер с ракетным двигателем. Сегодня есть целый ряд моделистов, создающих копии монокоптеров Маккатчена (McCutchen Machines) и свои собственные системы, а профессор Кентского университета (Огайо) даже выпустил по подобным моделям монографию.
При должной компактности к монокоптеру можно смело прикрепить даже очень дорогое оборудование (камеры, датчики), поскольку он не может упасть даже при отказе двигателя, да и вообще теоретическая надежность монокоптера весьма высока. Создатели Robotic Samara приводят и еще один аргумент в пользу дронов-наблюдателей однолопастной конфигурации: подобный робот вращается несколько сотен раз в минуту, каждый раз фиксируя панорамную картинку и, таким образом, собирая максимально возможную информацию об окружающей обстановке. Обычному дрону для получения такого же объема нужно разворачиваться, заходить на виражи и т. д. Правда, остается решить вопрос стабилизации, но при современном уровне технологий все возможно. И самое интересное, что шансы со-здать работающий и управляемый дрон-монокоптер у любителя-моделиста и серьезной организации вроде Lockheed Martin примерно равны. Особенно если DARPA выделит на это необходимые средства.
Создатели Robotic Samara приводят и еще один аргумент в пользу дронов-наблюдателей однолопастной конфигурации: подобный робот вращается несколько сотен раз в минуту, каждый раз фиксируя панорамную картинку и, таким образом, собирая максимально возможную информацию об окружающей обстановке. Обычному дрону для получения такого же объема нужно разворачиваться, заходить на виражи и т. д. Правда, остается решить вопрос стабилизации, но при современном уровне технологий все возможно. И самое интересное, что шансы со-здать работающий и управляемый дрон-монокоптер у любителя-моделиста и серьезной организации вроде Lockheed Martin примерно равны. Особенно если DARPA выделит на это необходимые средства.
Соосная схема. Зачем вертолетам Камова два несущих винта
https://ria.ru/20171112/1508583757.html
Соосная схема. Зачем вертолетам Камова два несущих винта
Соосная схема. Зачем вертолетам Камова два несущих винта — РИА Новости, 03.03.2020
Соосная схема. Зачем вертолетам Камова два несущих винта
Легкие, быстрые, компактные, надежные и необычные — эти характеристики идеально подходят серии вертолетов КБ имени Камова, которая в воскресенье отмечает. .. РИА Новости, 12.11.2017
.. РИА Новости, 12.11.2017
2017-11-12T08:00
2017-11-12T08:00
2020-03-03T08:06
/html/head/meta[@name=’og:title’]/@content
/html/head/meta[@name=’og:description’]/@content
https://cdnn21.img.ria.ru/images/141690/58/1416905818_0:0:2968:1670_1920x0_80_0_0_1c4f1339a81ffde18da8575253ede850.jpg
сирия
россия
РИА Новости
1
5
4.7
96
internet-group@rian.ru
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
2017
РИА Новости
1
5
4.7
96
internet-group@rian.ru
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
Новости
ru-RU
https://ria.ru/docs/about/copyright.html
https://xn--c1acbl2abdlkab1og.xn--p1ai/
РИА Новости
1
5
4.7
96
internet-group@rian.ru
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og. xn--p1ai/awards/
xn--p1ai/awards/
1920
1080
true
1920
1440
true
https://cdnn21.img.ria.ru/images/141690/58/1416905818_0:0:2732:2048_1920x0_80_0_0_5d900212cb595f0f1b1a57892ea21aff.jpg
1920
1920
true
РИА Новости
1
5
4.7
96
internet-group@rian.ru
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
РИА Новости
1
5
4.7
96
internet-group@rian.ru
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
безопасность, сирия, виктор мураховский, вмф рф, камов, ка-52 «аллигатор», ка-50 «черная акула», ка-27, министерство обороны рф (минобороны рф), россия
Безопасность, Сирия, Виктор Мураховский, ВМФ РФ, Камов, Ка-52 «Аллигатор», Ка-50 «Черная акула», Ка-27, Министерство обороны РФ (Минобороны РФ), Россия
МОСКВА, 12 ноя — РИА Новости, Андрей Коц. Легкие, быстрые, компактные, надежные и необычные — эти характеристики идеально подходят серии вертолетов КБ имени Камова, которая в воскресенье отмечает 70-летний юбилей. Двенадцатого ноября 1947 года в воздух поднялась первая машина знаменитого советского авиаконструктора Николая Камова — Ка-8 «Иркутянин». Это событие стало началом эпохи вертолетов с соосной схемой расположения несущих винтов. Россия до сих пор остается единственным государством в мире, наладившим массовое производство этих сложных машин. Камовские вертолеты успешно трудятся на «гражданских должностях», а также служат в частях армейской и морской авиации. О том, для чего нужна соосная схема, а также о ее главных преимуществах и недостатках — в материале РИА Новости.
Легкие, быстрые, компактные, надежные и необычные — эти характеристики идеально подходят серии вертолетов КБ имени Камова, которая в воскресенье отмечает 70-летний юбилей. Двенадцатого ноября 1947 года в воздух поднялась первая машина знаменитого советского авиаконструктора Николая Камова — Ка-8 «Иркутянин». Это событие стало началом эпохи вертолетов с соосной схемой расположения несущих винтов. Россия до сих пор остается единственным государством в мире, наладившим массовое производство этих сложных машин. Камовские вертолеты успешно трудятся на «гражданских должностях», а также служат в частях армейской и морской авиации. О том, для чего нужна соосная схема, а также о ее главных преимуществах и недостатках — в материале РИА Новости.
Без доворота
13 октября 2017, 09:03
«Вертолеты России» обсуждают с ВМФ поставки машин Ка-52К
Первый соосный летательный аппарат КБ имени Камова К-8 «Иркутянин» больше напоминает летающий мотоцикл, нежели привычный для взгляда обывателя вертолет.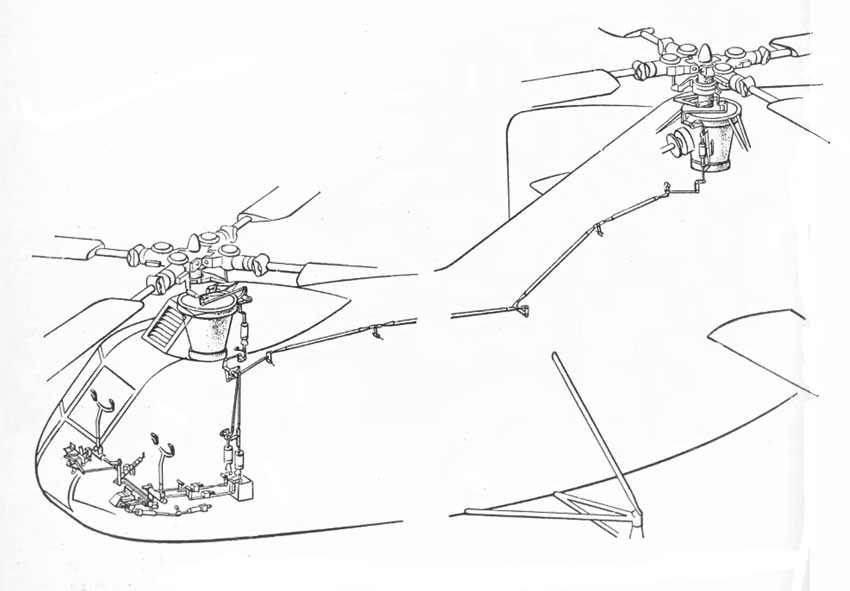 Во-первых, у него отсутствует фюзеляж. Вся конструкция состоит из стальных труб, закрепленных на двух надувных цилиндрических баллонах. Пилот сидит в небольшом открытом кресле. Максимальная взлетная масса Ка-8 — всего 320 килограммов, длина — 3,7 метра, высота 2,5 метра. Скромны и летные характеристики: «Иркутянин» был способен подниматься на 250 метров максимум и разгоняться до 80 километров в час. Впрочем, за скоростью и высотой при создании «первенца» камовцы не гнались. Настоящим прорывом стали несущие трехлопастные винты, расположенные один над другим. Это конструктивное решение — визитная карточка практически всех вертолетов Ка.
Во-первых, у него отсутствует фюзеляж. Вся конструкция состоит из стальных труб, закрепленных на двух надувных цилиндрических баллонах. Пилот сидит в небольшом открытом кресле. Максимальная взлетная масса Ка-8 — всего 320 килограммов, длина — 3,7 метра, высота 2,5 метра. Скромны и летные характеристики: «Иркутянин» был способен подниматься на 250 метров максимум и разгоняться до 80 километров в час. Впрочем, за скоростью и высотой при создании «первенца» камовцы не гнались. Настоящим прорывом стали несущие трехлопастные винты, расположенные один над другим. Это конструктивное решение — визитная карточка практически всех вертолетов Ка.
«Вертолет традиционной схемы в воздухе постоянно доворачивает в ту сторону, в которую вращается его несущий винт, — рассказал РИА Новости главный редактор журнала «Арсенал Отечества» Виктор Мураховский. — Чтобы компенсировать этот момент, на хвостовую балку машины устанавливают дополнительный рулевой винт, который крутит машину в противоположную сторону.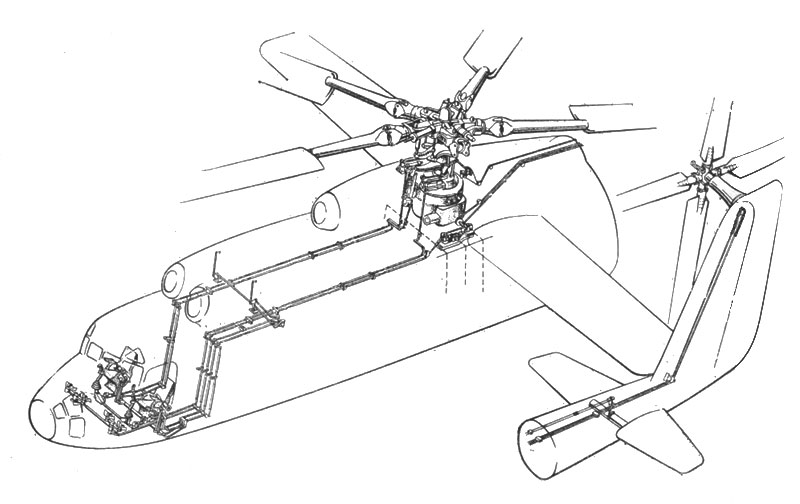 Вертолетам Камова такой привод просто-напросто не нужен. Их несущие винты вращаются в противоположные стороны. Такое решение значительно упрощает механику машины, снижает ее уязвимость. Говорят, что Ка-52 способен совершить посадку даже с отстреленным под корень хвостом».
Вертолетам Камова такой привод просто-напросто не нужен. Их несущие винты вращаются в противоположные стороны. Такое решение значительно упрощает механику машины, снижает ее уязвимость. Говорят, что Ка-52 способен совершить посадку даже с отстреленным под корень хвостом».
Ка-8 в боях поучаствовать не довелось. Во-первых, он предназначен для связи и разведки. Во-вторых, эта машина была построена всего в трех экземплярах. Впервые широкой публике «Иркутянина» показали на параде в Тушино летом 1948 года. Вертолет поднялся в воздух прямо с кузова грузовика, сделал несколько проходов и благополучно приземлился. Именно тогда им заинтересовалось командование ВМФ, заказавшее Камову проект создания специализированной разведывательной машины. С тех пор вертолеты Ка долгое время оставались флотским «эксклюзивом».
Любопытный факт: само слово «вертолет» вошло в обиход именно благодаря создателям Ка-8. Перед тушинским парадом организаторы спросили Николая Камова, как представить его машину публике. Тот подумал и ответил: «вертолет». До этого момента винтокрылые летательные аппараты именовали американизмом «геликоптер».
Тот подумал и ответил: «вертолет». До этого момента винтокрылые летательные аппараты именовали американизмом «геликоптер».
Работа над ошибками
30 июля 2017, 19:28
День ВМФ: боевые корабли, подлодки и флотская авиацияВ последнее воскресенье июля в России отмечается День Военно-морского флота. Как прошли торжества по случаю Дня ВМФ в разных городах — в фотоленте Ria.ru.
Прямыми потомками Ка-8 стали вертолеты Ка-10 и Ка-15, созданные на его основе. Первый появился в конце 1948 года и практически не отличался от оригинальной машины. Он получил более мощный двигатель, больший диаметр несущих винтов и радиостанцию. Кроме того, в Ка-10 была предусмотрена система катапультирования, выбрасывающая пилота назад путем складывания спинки кресла. Испытания этой машины были непростыми. Вертолет раз за разом терял винтами воздушный поток. Однажды это привело к трагедии. Летчик-испытатель Михаил Гуров поднял Ка-10 над испытательной площадкой на 200 метров, проверяя, насколько машине хватает топлива на такой высоте. Для этого он вел аппарат на номинальных оборотах. Скорости лопастей оказалось недостаточно, и вертолет упал. Гуров скончался по пути в больницу.
Для этого он вел аппарат на номинальных оборотах. Скорости лопастей оказалось недостаточно, и вертолет упал. Гуров скончался по пути в больницу.
Впрочем, со временем Ка-10 довели до ума. В 1951 году приняли решение о строительстве военной версии вертолета. К 1953 году в строю уже было девять машин. Ка-10 удалось успешно посадить на палубу крейсера «Максим Горький» при сильном ветре, что лишний раз доказало преимущество соосной схемы: вертолет практически не болтает даже в шторм. Кроме того, военный вариант машины получил полноценную приборную панель с высотомером, спидометром, компасом, вариометром и указателем оборотов несущих винтов.
© РИА Новости / Перейти в медиабанкСверхлегкий вертолет Ка-10
Ка-15 стал первым вертолетом Николая Камова, пошедшим в крупную серию. Всего было построено 354 машины этого типа. Ка-15 задумывался как противолодочный вертолет, но для нужд флота он получился недостаточно эффективным — сказывалась малая грузоподъемность. В итоге ВМФ разработал необычную тактику боевых троек. Первый Ка-15 нес два гидроакустических буя для обнаружения подлодок. На втором была установлена аппаратура управления и слежения. Глубинные бомбы же устанавливались на третьем. Понятно, что такой подход снижал общий боевой вес Ка-15. К тому же было несколько случаев схлестывания лопастей несущих винтов, что приводило к крушению вертолета. Вряд ли стоит винить в этом конструкторов: соосная схема в то время была малоизведанной областью. Приходилось учиться на ошибках.
Первый Ка-15 нес два гидроакустических буя для обнаружения подлодок. На втором была установлена аппаратура управления и слежения. Глубинные бомбы же устанавливались на третьем. Понятно, что такой подход снижал общий боевой вес Ка-15. К тому же было несколько случаев схлестывания лопастей несущих винтов, что приводило к крушению вертолета. Вряд ли стоит винить в этом конструкторов: соосная схема в то время была малоизведанной областью. Приходилось учиться на ошибках.
6 января 2017, 11:43
Российская морская авиация в Сирии за два месяца совершила 420 вылетов
«Такую схему очень сложно реализовать технически, в отличие от традиционного «одновинтового» подхода, — рассказал РИА Новости Виктор Мураховский. — Она требует большого объема научных расчетов, математики, глубокого знания аэродинамики. Винты на «камовых» располагаются близко друг к другу. Необходимо продумать, как они влияют друг на друга в полете, отработать все это на практике. С годами наши специалисты достигли очень высокого уровня. В других странах серийных машин такой конструкции просто нет — это наше ноу-хау. На Западе строят лишь какие-то опытные экземпляры, беспилотники, зонды. До массового производства дело так и не дошло».
С годами наши специалисты достигли очень высокого уровня. В других странах серийных машин такой конструкции просто нет — это наше ноу-хау. На Западе строят лишь какие-то опытные экземпляры, беспилотники, зонды. До массового производства дело так и не дошло».
Не только для моря
Всего для нужд Военно-морского флота КБ Камова разработало более десятка различных моделей вертолетов. На сегодняшний день в составе авиации ВМФ имеется 63 многоцелевых Ка-27 и 16 поисково-спасательных Ка-27ПС, 28 транспортно-боевых Ка-29, а также несколько машин радиолокационного дозора Ка-31. Эти вертолеты способны выполнять самый широкий круг задач: вести разведку, высаживать десант на побережье, поддерживать его огнем, спасать сбитых над морем летчиков, выслеживать подводные лодки противника и многое-многое другое. Работу соосных винтов на данных машинах удалось «отполировать до блеска» — серьезные летные происшествия с ними можно пересчитать по пальцам двух рук.
«У соосных вертолетов выше грузоподъемность и на внешней подвеске, и внутри кабины, а кроме того, габариты соосного вертолета меньше, что очень удобно при использовании, например, на нефтяных площадках, — рассказал РИА Новости Заслуженный летчик-испытатель России, старший летчик-испытатель АО «Камов» (входит в концерн «Вертолеты России») Александр Папай. — При соосной схеме управляемость вертолета выше, выше маневренность и лучше высотные характеристики, потому что вся мощность идет на основные винты. А маневренность нужна при ведении боевых действий. Соосный вертолет симметричен, у него нет в полете дополнительных кренов».
— При соосной схеме управляемость вертолета выше, выше маневренность и лучше высотные характеристики, потому что вся мощность идет на основные винты. А маневренность нужна при ведении боевых действий. Соосный вертолет симметричен, у него нет в полете дополнительных кренов».
Весь накопленный за десятилетия опыт камовцы использовали при создании машин и для армейской авиации. О «Черных акулах» Ка-50 и их двухместных модификациях Ка-52 «Аллигатор» слышали, наверное, все. Бронированные и вооруженные самыми современными ракетами «летающие танки» показали себя грозной силой. Боевая эксплуатация Ка-50 в Чечне подтвердила, что вертолеты соосной схемы прекрасно себя чувствуют не только над морем, но и в горах, где боковой ветер и сложные метеоусловия могут погубить даже опытного пилота.
© Фото : Управление пресс-службы и информации МО РФВертолет Ка-50
© Фото : Управление пресс-службы и информации МО РФ
«Черная акула» получилась очень живучей. В одном из боевых вылетов экипаж отстрелялся по боевикам с малой высоты, в результате чего в одну из лопастей попал крупный осколок. Вертолет без проблем долетел до аэродрома Ханкала, где поврежденный участок просто отрезали. После этого он своим ходом добрался до пункта базирования. В целом же летчики в Ка-50 буквально влюбились. Мощное бронирование кабины и наличие системы катапультирования придает экипажам уверенности, что в сочетании с высокой автоматизацией полета и отличными маневренными характеристиками самым положительным образом влияет на боевой дух летчиков.
Вертолет без проблем долетел до аэродрома Ханкала, где поврежденный участок просто отрезали. После этого он своим ходом добрался до пункта базирования. В целом же летчики в Ка-50 буквально влюбились. Мощное бронирование кабины и наличие системы катапультирования придает экипажам уверенности, что в сочетании с высокой автоматизацией полета и отличными маневренными характеристиками самым положительным образом влияет на боевой дух летчиков.
19 июня 2017, 13:51
Вертолет Ка-52К «Катран»Ка-52К предназначен для базирования на кораблях ВМФ России. Об особенностях конструкции вертолета — в инфографике Ria.ru.
Все эти черты характерны и для двухместного Ка-52, дебютировавшего в Сирии. В марте 2016 года несколько «Аллигаторов» были переброшены на авиабазу Хмеймим и начиная с апреля используются в различных операциях. Обкатали на Ближнем Востоке и палубную модификацию Ка-52К, получившую обозначение «Катран». Обе машины прекрасно показали себя в не самом привычном для них климате.
На сегодняшний день в частях армейской авиации стоят на вооружении более 100 «Аллигаторов». До конца 2017 года Минобороны должно получить еще 14 машин. Наравне с милевскими Ми-28Н и Ми-35 они будут оставаться основными ударными вертолетами Российской армии в ближайшие десятилетия.
18 самых дорогих мотоциклов
Для каждого байкера его железный конь — это не средство передвижения, а скорее страсть, болезнь и даже философия. В наше время самые дорогие мотоциклы в мире — это еще и роскошь, и предмет самоутверждения.
Содержание
10 место:
MTT Y2K 420RR — $200 000
Мотоцикл, построенный на базе спортбайка Y2K, созданного специально для съёмок в низкобюджетной голливудской киноленте «Torque». В качестве силового агрегата используется вертолётный двигатель Rolls Roys Allison, развивающий 420 л.с. мощности и 678 Нм крутящего момента. Максимальная скорость 420RR превышает 420 кмч.
Самый дорогой мотоцикл в мире – цена, фото и характеристика
Фото самого дорогого мотоцикла Ecosse Spirit ES1
Самым дорогим мотоциклом в мире признан Ecosse Spirit ES1. Его разработкой и изготовлением занималась фирма «Ecosse Moto Works Ink» и немаловажную роль в него внесли конструкторы и инженеры Формулы 1. Они постарались оснастить байк по максимуму.
Его разработкой и изготовлением занималась фирма «Ecosse Moto Works Ink» и немаловажную роль в него внесли конструкторы и инженеры Формулы 1. Они постарались оснастить байк по максимуму.
Благодаря наличию новейших эргономичных приспособлений у них получилось добиться наименьшего сопротивления воздуху. А установленная надежная электронная система отвечает за контроль функционирования других систем. Цена самого дорогого мотоцикла очень высокая.
Цена самого дорогого мотоцикла 3,6 млн долларов
Улучшить всю тормозную систему у них получилось с помощью установки керамического тормоза на первое колесо. Что касается веса мотоцикла, так он на удивление не сильно тяжелый, всего 120 килограмм и оснащен V-образным четырехтактным двигателем, мощность которого составляет 200 лошадиных сил, а крутящийся момент – 189,84 Нм. Такой мощный двигатель в теории дает возможность развиться мотоциклу аж до 400 км/ч. Но еще и свою лепту внес сам корпус. Так как он не стандартный, то ноги автогонщика при езде вообще невидны.
Несмотря на то, что максимальная скорость мотоцикла 400 км/ч, на практике самый дорогой спортивный мотоцикл может разогнаться только до 370 км/ч из-за электроники, устанавливающей такое ограничение.
Самый дорогой мотоцикл в мире – “его цена баснословная”, – отмечают многие мотоциклисты и мотогонщики и равняется она $3 600 000. В первые партия Ecosse Spirit ES1 на моторынке появилась в 2009 году и состояла она из 10 байков. Несмотря на заоблачную цену, этот спортивный агрегат был раскуплен практически сразу. Эта модель представлялась в двух вариантах. Первый предназначался для опытных гонщиков благодаря специальным колесам, а второй был просто спортивным байком.
Не удивительно, что за такую громадную стоимость покупатель получает не просто крутой мотоцикл. Главное преимущество заключает в том, что у нового владельца есть возможность подогнать его дизайн под себя с помощью лучших разработчиков команды «Формула – 1».
8 место:
Ducati Testa Stretta NCR Macchia Nera
— $225 000
Созданный в единственном экземпляре гоночный мотоцикл Macchia Nera может похвастать впечатляющим соотношением мощности к массе — 180 л. с. на 134 кг массы. Для этого пришлось совместить двигатель от спортбайка Ducati 998R и уникальную кастомную выхлопную систему с жестким титановым шасси. Максимальная скорость, которую способен развить этот итальянский жеребец превышает 300 кмч.
с. на 134 кг массы. Для этого пришлось совместить двигатель от спортбайка Ducati 998R и уникальную кастомную выхлопную систему с жестким титановым шасси. Максимальная скорость, которую способен развить этот итальянский жеребец превышает 300 кмч.
4. Dodge Tomahawk
Dodge Tomahawk — мотоцикл наводит мысли о будущем, такой у него невероятный вид. Помимо этого максимально заявленная скорость — 650 км / ч. Конечно это в теории. Разгон до 100 км всего за 2,5 секунды. Объем двигателя 8,2 литра, мощность 500 л. с.
Стоимость — 550 000 долларов.
7 место:
Ecosse Moto Works Founder’s Edition Titanium XX — $300 000
Настоящая американская мощь — в области мотоциклостроения двигатели объёмом 2100 см3 встретишь нечасто. Особенно, оснащенные нагнетателем и интеркуллером V-образники. Тем не менее, Ecosse Moto Works удалось совместить подобный мотор с ультралегкими компонентами, для производство которых используется титан, алюминий и карбон.
6.
 Мотоцикл Harley Davidson
Мотоцикл Harley Davidson
Мотоцикл Harley Davidson. Хотя если честно, то от классического Харлея там мало что осталось. Сам агрегат выполнен в стиле космического корабля. Плюс к этому к его оформлению приложил руку (да и голову тоже) знаменитый художник и дизайнер Джек Армстронг. Первоначальная стоимость его творения была 1 000 000 долларов. Но после его заявления, что это первый и последний проект такого рода, цена на байк подскочила сразу в 3 раза до невероятных 3 миллионов долларов.
6 место:
Dodge Tomahawk
— $540 000
Гипербайк Dodge Tomahawk не зря носит имя одного из самых быстрых представителей автомира. В раме мотоцикла расположился двенадцатицилиндровый двигатель от Dodge Viper. По заявлениям компании Dodge, Tomahawk способен преодолеть отметку в 500 кмч. Всего выпущено около 10 мотоциклов.
8. Tron Light Cycle
Компания «Эндрю Коллекш» — уникальное автомобильное представительство в Калифорнии, недавно продала точную копию небольшого мотоцикла известного по фильму «Трон» 1982 года с Джеффом Бриджесом. Если вы были фанатом этой машины, то у вас был шанс увидеть её в мае этого года. В мотоцикл поместили электродвигатель, гидравлические тормоза и бортовой компьютер, с помощью которого осуществляется управление байком. Цена: $77,000.
Если вы были фанатом этой машины, то у вас был шанс увидеть её в мае этого года. В мотоцикл поместили электродвигатель, гидравлические тормоза и бортовой компьютер, с помощью которого осуществляется управление байком. Цена: $77,000.
5
место:
Harley-Davidson Cosmic Starship — $1 500 000
Проект, по заявлению его создателя, художника Джека Армстронга, призван подчеркнуть изречение “За деньги вкус не купишь”, был построен совместно с компанией Harley-Davidson на базе слегка модифицированного круизёра Night Rod. Чтобы подчеркнуть яркость и эксклюзивность мотоцикла, Армстронг покрыл его 37 слоями бесцветного лака. Известно, что нынешнему владельцу “Космический Корабль” достался “всего” за десять миллионов долларов.
9. Confederate B120 Wraith
Еще один дорогой байк. Чтобы примерно оценить его стоимость, то можно сравнить данный агрегат с BMW 5 за 45,000$. Двигатель байка удивительно привлекателен: оснащён двумя цилиндрами, выдающими 125 лошадиных сил. Мотоцикл отличает и дизайн: в нем присутствуют элементы алюминия, который применяют при строительстве самолетов. Также байк сочетает ретро-стиль с современностью. Поэтому, если вы больше любите внешний вид, чем скорость, этот мотоцикл определенно для вас. Цена: $92,500.
Мотоцикл отличает и дизайн: в нем присутствуют элементы алюминия, который применяют при строительстве самолетов. Также байк сочетает ретро-стиль с современностью. Поэтому, если вы больше любите внешний вид, чем скорость, этот мотоцикл определенно для вас. Цена: $92,500.
4 место:
Yamaha BMS — $3 000 000
Отличительной особенностью мотоцикла Yamaha BMS, помимо кастомной рамы, покрытой 24-каратным золотом, вилки, модифицированного двигателя с рабочим обёмом 1700 см3, является его цена составляющая внушительные три миллиона долларов. Именно столько его нынешнему хозяину пришлось выложить за право обладание этим кастомом.
Yamaha Road Star BMS (Золотой чоппер)
500 000 $
Странная форма мотоцикла, длиной в два с половиной метра, и отделка под золото делает этот мотоцикл одним из самых зрелищных байков современности. Но, когда на большинстве мотоциклов имитируется покрытие золотом, здесь все по-настоящему. Вместо привычной кожи, седла обшиты красным бархатом. Этот шедевр искусства сделан на основе стандартной модели Road Star Warrior и впервые, был показан в Сиэтле. Самое неприятное, что по городским дорогам ехать на нем нельзя.
Этот шедевр искусства сделан на основе стандартной модели Road Star Warrior и впервые, был показан в Сиэтле. Самое неприятное, что по городским дорогам ехать на нем нельзя.
3
место:
Hildebrand & Wolfmuller — $3 500 000
Hildebrand & Wolfmuller не блещет выдающимися техническими характеристиками или впечатляющим дизайном. Его ценность в том, что он считается первым серийным мотоциклом в мире. Согласно документам, мотоцикл производился в период с 1894 по 1897 годов. До наших дней сохранилось порядка 10 экземпляров, большинство из которых находится в музеях.
14. Icon Sheene
Этот байк можно назвать чемпионом Британии среди своих конкурентов. Как и другие представители премиум-класса, мотоцикл был выпущен ограниченным количеством, получил 52 копии. Дизайнеры вручную расписывали его, чтобы каждая модель отличалась оригинальностью. Двигатель удивит своей мощностью (250 л.с.). Первый байк стоил 172,000$ и был назван самым мощным мотоциклом в мире. Цена: $172,000.
Цена: $172,000.
4. The Yamaha BMS – $3 миллионов
Удивительный позолоченный мотоцикл в стиле чоппер, построенный парнями из Choppers BMS. Такой роскошный продукт механики уже получил несколько наград за свой потрясающий дизайн. На его покрытие ушло 24-карата золота. Сиденье было обтянуто красным бархатом. Это придает ему одновременно и стильность, и комфорт. Мотоцикл сконструировали еще в 2006 году, и с тех пор он гастролировал по многим городам США.
1. 1949 E90 AJS Porcupine – $7 миллионов
Всего 4 гоночных мотоцикла «Porcupine» (Дикобраз – прозван из-за шипов на ребрах охлаждения) было выпущено британскими мастерами из AJS. Представленный на аукционе «Бонхемс» мотоцикл «Porcupine» позволил AJS и гонщику Лесли Грэму выиграть пальму первенства на послевоенных британских гонках и завоевать гран-при чемпионата мира Moto GP в 1949 году. Двигатель у AJS 1949 года объемом 500 куб. см. выдает мощность 55 л.с. при 7600 об/мин.
Источник:
Ссылки по теме:
Понравился пост? Поддержи Фишки, нажми:
Как работает турбина двигателя самолета — mad wheels
Как работает авиационный двигатель — простым языком.
То что вы видите под крылом — это не турбина, а именно авиационный двигатель, а турбина — это его составная часть.
Авиационный турбовентиляторный реактивный двигатель необходим для создания тяги, которая преодолеет сопротивление воздуха, сопротивление самолета и его частей, разгонит самолет до скорости, на которой вырастет подъемная сила, способная оторвать самолет от земли и унести его с полной загрузкой в небо.
Передняя часть двигателя называется воздухозаборник. Воздух, попадая в него, начинает частично сжиматься. Далее воздух попадает на ступени вентилятора и ряд лопаток, где его давление и температура от сжимания начинает расти.
Воздух дальше идет по двум контурам. Внешний контур сжимает воздух благодаря своей форме. Воздух, который пошел во внутренний контур все больше сжимается, проходя каждый ряд статичных и крутящихся лопаток, сделанных из титана.
В компрессоре высокого давления он сжимается и его температура растет. И вот воздух попадает в камеру сгорания, где он смешивается с топливом. В результате этого резко растет тепловая энергия.⠀
Разогретые до огромной температуры газы выходят с бешеной скоростью из камеры сгорания и расширяются. Попадая на колесо турбины, они приводят ее в вращение.Турбина сидит на одном валу с компрессором. Компрессор начинает вращаться и получается замкнутая цепь. Воздух вновь засасывается компрессором и процесс продолжается.
Далее происходит следующее: разогретые до огромной температуры газы выходят с бешеной скоростью из камеры сгорания и расширяются. Попадая на колесо турбины, они приводят ее во вращение.
Турбина сидит на одном валу с компрессором. Компрессор начинает вращаться. Получается замкнутая цепь: воздух вновь засасывается компрессором, и процесс повторяется.
Выходящие газы попадают в сопло и на выходе из него смешиваясь с воздухом с внешнего контура создают реактивную струю, которая и толкает самолет сквозь воздушную среду.
ТРД стал самым распространённым в авиации воздушно-реактивным двигателем. Он является базой для создания целого семейства двигателей, объединяемых под общим названием газотурбинных двигателей. ТРД используют в качестве горючего керосин, находящийся в топливных баках, а в качестве окислителя – кислород воздуха.
Поток воздуха, попадающего в двигатель, тормозится во входном устройстве (1), в результате чего давление воздуха перед осевым компрессором (2) повышается. Ротор (вращающаяся часть) объединяет ряд рабочих колёс компрессора (3), представляющих собой диски с закреплёнными на них рабочими лопатками.
Сжатый воздух из компрессора попадает в камеру сгорания (7). Примерно 25–35% от общего потока воздуха направляется непосредственно в жаровые трубы, где происходит основной процесс сгорания керосина, поступающего в распылённом состоянии через форсунки (5).
Другая часть воздуха обтекает наружные поверхности жаровых труб, и на выходе из камеры сгорания смешивается с продуктами сгорания для их охлаждения, что позволяет поддерживать температуру газовоздушной смеси в камере сгорания на уровне, определяемом допустимой теплопрочностью стенок камеры сгорания, лопаток ротора (8) и лопаток спрямляющего аппарата турбины (9).
Часть механической мощности отбирается от вала (6) для привода агрегатов двигателя и привода электрогенераторов, обеспечивающих энергией различные бортовые системы. Основная часть энергии продуктов сгорания идёт на ускорение газового потока в выходном устройстве ТРД – реактивное сопло (10), т. е. на создание реактивной тяги.
Стартовая закрутка вала (5) осуществляется стартером, приводимым при запуске двигателя от наземного или бортового электроагрегата, при дальнейшей работе двигателя вращение вала поддерживается вращением ротора турбины.
Турбонаддув – это система, позволяющая увеличить максимальную мощность двигателя, используя для этого энергию выхлопных газов.
Первые турбины хотя и давали весьма ощутимую прибавку в мощности, но из-за своей громоздкости во много раз увеличивали и без того немаленький вес двигателей автомобилей тех лет.
Конструкторы со временем усовершенствовали технологию, сделав элементы системы более легковесными, одновременно повысив ее производительность. Но одним из существенных недостатков оставался повышенный расход топлива.
Но одним из существенных недостатков оставался повышенный расход топлива.
Конструкторам удалось решить одну из главных проблем турбодвигателя – расход топлива, ведь, как известно, дизельный агрегат менее «прожорливый», чем бензиновый.
Еще один несомненный плюс дизельного топлива – его отработанные газы имеют температуру ниже, чем бензиновые, стало быть, основные агрегаты системы турбонаддува можно было производить из менее тяжеловесных и жаростойких материалов.
Реактивное движение – это такой процесс, при котором от определенного тела с некоторой скоростью отделяется одна из его частей. Сила, которая возникает при этом, работает сама по себе, без малейшего контакта с внешними телами. Реактивное движение стало толчком к созданию реактивного двигателя.
Представим выстрел из любого огнестрельного оружия. Струя раскаленного газа, который образовался в процессе сгорания заряда в патроне, отталкивает оружие назад. Чем мощнее заряд, тем сильнее будет отдача.
В качестве горючего для реактивных двигателей вначале применяли дымный порох. Реактивные двигатели требовали топлива с основой из нитроцеллюлозы, которая растворялась в нитроглицерине. В больших агрегатах сегодня используют специальную смесь полимерного горючего с перхлоратом аммония в качестве окислителя.
Реактивные двигатели требовали топлива с основой из нитроцеллюлозы, которая растворялась в нитроглицерине. В больших агрегатах сегодня используют специальную смесь полимерного горючего с перхлоратом аммония в качестве окислителя.
В качестве топлива в реактивных двигателях используется жидкий кислород либо азотная кислота. В качестве горючего применяют керосин.
Компоненты поступают в камеру сгорания из двух отдельных баков. После смешивания они превращаются в массу, которая при сгорании выделяет огромное количество тепла и десятки тысяч атмосфер давления. Окислитель подается в камеру сгорания.
Топливная смесь по мере прохождения между сдвоенными стенками камеры и сопла охлаждает эти элементы. Далее горючее попадет через огромное количество форсунок в зону воспламенения. Струя вырывается наружу. За счет этого и обеспечивается толкающий момент.
Несмотря на то что жидкостные двигатели потребляют очень много горючего, их до сих пор используют в качестве маршевых агрегатов для ракеты-носителей и маневровых для орбитальных станций.
Устроен РД следующим образом:
— камера для сгорания;
— выхлопная система.
Компрессор представляет собой несколько турбин. Их задача – всасывать и сжимать воздух по мере того, как он проходит через лопасти. В процессе сжатия повышается температура и давление воздуха.
Смесь выходит из камеры сгорания на высокой скорости, а затем расширяется. Далее она следует через турбину, лопасти которой вращаются за счет воздействия газов. Эта турбина, соединяясь с компрессором, находящимся в передней части агрегата, и приводит его в движение. Воздух, нагретый до высоких температур, выходит через выпускную систему.
Эти агрегаты имеют массу преимуществ перед турбореактивными (меньший расход топлива при той же мощности).
Воздух, захватываемый турбиной, частично сжимается и подается в первый контур на компрессор и на второй – к неподвижным лопастям. Турбина при этом работает в качестве компрессора низкого давления.
В первом контуре двигателя воздух сжимается и подогревается, а затем подается в камеру сгорания. Здесь происходит смесь с топливом и воспламенение. Образуются газы, которые подаются на турбину высокого давления, за счет чего и вращаются лопасти турбины.
Здесь происходит смесь с топливом и воспламенение. Образуются газы, которые подаются на турбину высокого давления, за счет чего и вращаются лопасти турбины.
Затем газы проходят через турбину низкого давления. Она приводит в действие вентилятор, и газы попадают наружу, создавая тягу.
Конструкция и принцип работы были взяты из механизма турбореактивного мотора, а от поршневого — воздушные винты. Таким образом, стало возможным совмещение небольших габаритов, экономичности и высокого коэффициента полезного действия.
Однако для сверхзвуковой скорости они годными не были. Поэтому с появлением таких мощностей в военной авиации от них отказались. Зато гражданские самолеты в основном снабжаются именно ими.
Схема турбовинтового двигателя выглядит следующим образом: после нагнетания и сжатия компрессором воздух попадает в камеру сгорания. Туда же впрыскивается топливо. Полученная смесь воспламеняется и создает газы, которые при расширении поступают в турбину и вращают ее. Нерастраченная энергия выходит через сопло, создавая реактивную тягу.
Турбина способна развить скорость до 20 тысяч оборотов в минуту, но винт не сможет ей соответствовать, поэтому здесь имеется понижающий редуктор. Редукторы могут быть разными, но главная их задача — снижать скорость и повышать момент.
Для повышения тяги иногда двумя винтами снабжается турбовинтовой двигатель. Принцип работы при этом у них реализуется за счет вращения в противоположные стороны, но при помощи одного редуктора.
Преимуществами турбовинтового двигателя являются:
Принцип работы турбокомпрессора сводится к следующему:
Турбокомпрессор используется ввиду простоты конструкции и хороших эксплуатационных параметров. Турбонаддув позволяет увеличить мощность двигателя.
Двигатель с турбокомпрессором имеет меньший выброс вредных газов в атмосферу, так как вырабатываются дополнительные выхлопные газы в двигатель. У сгораемого топлива становится меньше отходов.
Использование двух турбокомпрессоров и других турбо деталей
На некоторые двигатели устанавливается два турбокомпрессора разного размера. Малый турбокомпрессор быстрее набирает обороты, снижая тем самым задержку ускорения, а большой обеспечивает больший наддув при высокой скорости вращения двигателя.
Малый турбокомпрессор быстрее набирает обороты, снижая тем самым задержку ускорения, а большой обеспечивает больший наддув при высокой скорости вращения двигателя.
Охладитель воздуха или охладитель наддувочного воздуха является дополнительным устройством, которое выглядит как радиатор, только воздух проходит как внутри, так и снаружи охладителя.
Охладитель увеличивает мощность двигателя, охлаждая сжатый воздух от компрессора перед его подачей в двигатель.
Турбокомпрессоры также обладают преимуществом на большой высоте, где плотность воздуха ниже. Обычные двигатели будут работать слабее на большой высоте над уровнем моря, т.к. на каждый ход поршня подаваемая масса воздуха будет меньше. Мощность двигателя с турбокомпрессором также снизится, но менее заметно, т.к. разреженный воздух легче сжимать.
Газовой турбиной принято называть своеобразный тепловой двигатель, его рабочим частям предопределено только одно задание – вращаться вследствие воздействия струи газа.
Интересно, что механизмы турбин начали разрабатываться инженерами уже очень давно. Первая примитивная паровая турбина была создана ещё в I веке до н. э.
Активно разрабатываться турбины начали в конце XIX века одновременно с развитием термодинамики, машиностроения и металлургии.
Технические характеристики газовой турбины
Главная часть турбины представлена колесом, на которое прикреплены наборы лопаток. Газ, воздействуя на лопатки газовой турбины, заставляет их двигаться и вращать колесо. Колесо жёстко скреплено с валом.
Это ротор турбины. Вследствие этого движения достигается получение механической энергии, которая передаётся на электрогенератор, на гребной винт корабля, на воздушный винт самолёта и другие рабочие механизмы аналогичного принципа действия.
Активная турбина характеризуется тем, что здесь отмечается большая скорость поступления газа на рабочие лопатки. При помощи изогнутой лопатки струя газа отклоняется от своей траектории движения.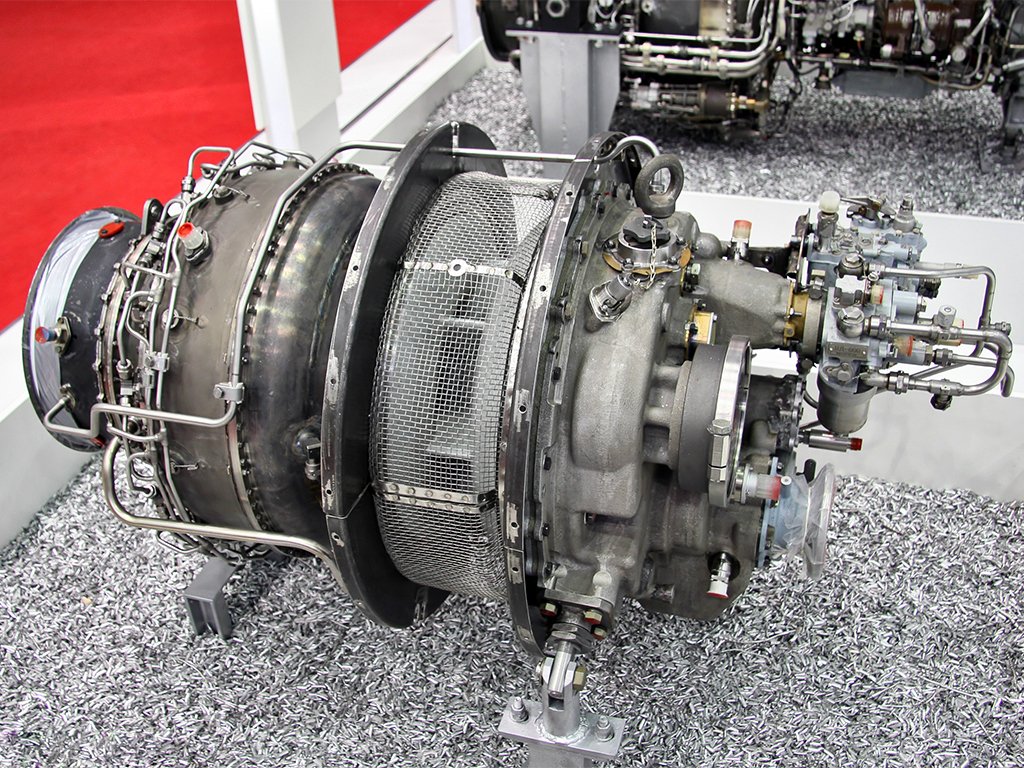 В результате отклонения развивается большая центробежная сила.
В результате отклонения развивается большая центробежная сила.
В реактивной турбине поступление газа к рабочим лопаткам осуществляется на незначительной скорости и под воздействием большого уровня давления. Форма лопаток так же отлична, благодаря чему скорость газа значительно увеличивается.
Схема и принцип действия газотурбинного двигателя
Газотурбинным двигателем (ГТД) называют тепловую машину, в которой энергия топлива преобразуется в кинетическую энергию струи и в механическую работу на валу. Основными элементами ГТД являются компрессор, камера сгорания и газовая турбина.
Принцип действия ГТД следующий.
1. Воздух из атмосферы поступает в компрессор (сечение «В-В»), где происходит сжатие воздуха (плотность, давление и температура возрастают). Если компрессор идеальный, то сжатие воздуха осуществляется в адиабатном процессе ( ), показатель адиабаты к=1.4.
Отношение давления воздуха на выходе из компрессора к давлению на входе называется степенью повышения давления в компрессоре: .
2. Из компрессора (сечение «К-К») воздух поступает в камеру сгорания, где при постоянном давлении происходит подвод тепла к потоку воздуха при горении топлива. В результате подогрева в камере сгорания газ на её выходе имеет высокую температуру. Отношение температуры газа на выходе из камеры сгорания к температуре атмосферного воздуха называется степенью подогрева воздуха в двигателе: .
3. Из камеры сгорания газ поступает в турбину (сечение «Г-Г»), где происходит расширение газа (плотность газа уменьшается). Если турбина идеальная, то процесс расширения принимается адиабатным. Показатель адиабаты газа равен 1.33.
4. Из турбины (сечение «Т-Т») газ направляется в выходной канал двигателя. Таким образом, ГТД представляет собой открытую термодинамическую систему, в которой реализуется цикл Брайтона.
Принцип действия и устройство турбин. Активные и реактивные принципы работы турбин
Турбина является тепловым ротационным двигателем, в котором потенциальная тепловая энергия пара (или газа) превращается в кинетическую, а последняя в свою очередь преобразуется в механическую работу вращения вала.
Пар с давлением более высоким, чем за турбиной, поступает в одно или несколько неподвижных каналов 5. В сопловых каналах пар расширяется, давление его падает, а скорость возрастает.
Из сопл пар поступает в рабочие каналы, образованные рабочими лопатками 3, закрепленными на диске 2. Двигаясь в рабочих каналах между рабочими лопатками и изменяя свое направление, поток пара оказывает силовое воздействие на рабочие лопатки. В результате чего они вращаются вместе с диском и валом 1, установленным в опорных подшипниках 4.
Комплект, состоящий из сопл и рабочих лопаток, в которых совершается процесс расширения пара, называется ступенью давления турбины. Простейшие турбины, имеющие лишь одну ступень, называются одноступенчатыми, в отличие от более сложных многоступенчатых турбин.
Тремя основными элементами, содержащимися в конструкции турбокомпрессора являются: центробежный компрессор, турбина и центральный корпус. Кинетическая энергия отработанных газов под воздействием турбины преобразуется во вращательное движение компрессора.
Кинетическая энергия отработанных газов под воздействием турбины преобразуется во вращательное движение компрессора.
Также турбина соединяет турбинное колесо, помещённое в специальный корпус в форме улитки.
Поступая в улитку, отработавшие газы перемещаются по каналу и попадают на лопасти турбинного колеса. Вал, к которому приварено турбинное колесо, передаёт на колесо компрессора энергию, которая придаёт его вращению.
Лопасти турбинного колеса становятся проводниками отработавших газов, которые затем покидают турбину через отверстие в центре турбокомпрессора и выходят в выпускную систему.
От формы и размера турбины напрямую зависит производительность турбокомпрессора. Значительный прирост мощности наблюдается в турбинах большего размера, потому что они могут использовать большее давление отработавших газов. Однако в таких турбокомпрессорах, на низких оборотах, значительна вероятность возникновения турбоямы.
Понравилась статья? Расскажите друзьям:
Оцените статью, для нас это очень важно:
Проголосовавших: 2 чел.
Средний рейтинг: 5 из 5.
Впервые самолет с турбореактивным двигателем (ТРД) поднялся в воздух в 1939 году. С тех пор устройство двигателей самолетов совершенствовалось, появились различные виды, но принцип работы у всех них примерно одинаковый. Чтобы понять, почему воздушное судно, имеющий столь большую массу, так легко поднимается в воздух, следует узнать, как работает двигатель самолета. ТРД приводит в движение воздушное судно за счет реактивной тяги. В свою очередь, реактивная тяга является силой отдачи струи газа, которая вылетает из сопла. То есть получается, что турбореактивная установка толкает самолет и всех находящихся в салоне людей с помощью газовой струи. Реактивная струя, вылетая из сопла, отталкивается от воздуха и таким образом, приводит в движение воздушное судно.
Устройство турбовентиляторного двигателя
Устройство двигателя самолета достаточно сложное. Рабочая температура в таких установках достигает 1000 и более градусов. Соответственно, все детали, из которых двигатель состоит, изготавливаются из устойчивых к воздействию высоких температур и возгоранию материалов. Из-за сложности устройства существует целая область науки о ТРД.
ТРД состоит из нескольких основных элементов:
Перед турбиной установлен вентилятор. С его помощью воздух затягивается в установку извне. В таких установках используются вентиляторы с большим количеством лопастей определенной формы. Размер и форма лопастей обеспечивают максимально эффективную и быструю подачу воздуха в турбину. Изготавливаются они из титана. Помимо основной функции (затягивания воздуха), вентилятор решает еще одну важную задачу: с его помощью осуществляется прокачка воздуха между элементами ТРД и его оболочкой. За счет такой прокачки обеспечивается охлаждение системы и предотвращается разрушение камеры сгорания.
Возле вентилятора расположен компрессор высокой мощности. С его помощью воздух поступает в камеру сгорания под высоким давлением. В камере происходит смешивание воздуха с топливом. Образующаяся смесь поджигается. После возгорания происходит нагрев смеси и всех расположенных рядом элементов установки. Камера сгорания чаще всего изготавливается из керамики. Это объясняется тем, что температура внутри камеры достигает 2000 градусов и более. А керамика характеризуется устойчивостью к воздействию высоких температур. После возгорания смесь поступает в турбину.
Вид самолетного двигателя снаружи
Турбина представляет собой устройство, состоящее из большого количества лопаток. На лопатки оказывает давление поток смеси, приводя тем самым турбину в движение. Турбина вследствие такого вращения заставляет вращаться вал, на котором установлен вентилятор. Получается замкнутая система, которая для функционирования двигателя требует только подачи воздуха и наличия топлива.
Далее смесь поступает в сопло. Это завершающий этап 1 цикла работы двигателя. Здесь формируется реактивная струя. Таков принцип работы двигателя самолета. Вентилятор нагнетает холодный воздух в сопло, предотвращая его разрушение от чрезмерно горячей смеси. Поток холодного воздуха не дает манжете сопла расплавиться.
Это завершающий этап 1 цикла работы двигателя. Здесь формируется реактивная струя. Таков принцип работы двигателя самолета. Вентилятор нагнетает холодный воздух в сопло, предотвращая его разрушение от чрезмерно горячей смеси. Поток холодного воздуха не дает манжете сопла расплавиться.
В двигателях воздушных судов могут быть установлены различные сопла. Наиболее совершенными считаются подвижные. Подвижное сопло способно расширяться и сжиматься, а также регулировать угол, задавая правильное направление реактивной струе. Самолеты с такими двигателями характеризуются отличной маневренностью.
Двигатели для самолетов бывают различных типов:
Классические установки работают по принципу, описанному выше. Такие двигатели устанавливают на воздушных судах различной модификации. Турбовинтовые функционируют несколько иначе. В них газовая турбина не имеет механической связи с трансмиссией. Эти установки приводят самолет в движение с помощью реактивной тяги лишь частично. Основную часть энергии горячей смеси данный вид установки использует для привода воздушного винта через редуктор. В такой установке вместо одной присутствует 2 турбины. Одна из них приводит компрессор, а вторая – винт. В отличие от классических турбореактивных, винтовые установки более экономичны. Но они не позволяют самолетам развивать высокие скорости. Их устанавливают на малоскоростных воздушных судах. ТРД позволяют развивать гораздо большую скорость во время полета.
Основную часть энергии горячей смеси данный вид установки использует для привода воздушного винта через редуктор. В такой установке вместо одной присутствует 2 турбины. Одна из них приводит компрессор, а вторая – винт. В отличие от классических турбореактивных, винтовые установки более экономичны. Но они не позволяют самолетам развивать высокие скорости. Их устанавливают на малоскоростных воздушных судах. ТРД позволяют развивать гораздо большую скорость во время полета.
Турбовентиляторные двигатели представляют собой комбинированные установки, сочетающие элементы турбореактивных и турбовинтовых двигателей. Они отличаются от классических большим размером лопастей вентилятора. И вентилятор, и винт функционируют на дозвуковых скоростях. Скорость перемещения воздуха понижается за счет наличия специального обтекателя, в который помещен вентилятор. Такие двигатели более экономично расходуют топливо, чем классические. Кроме того, они характеризуются более высоким КПД. Чаще всего их устанавливают на лайнерах и самолетах большой вместительности.
Размер двигателя самолета относительно человеческого роста
Прямоточные воздушно-реактивные установки не предполагают использование подвижных элементов. Воздух втягивается естественным путем благодаря обтекателю, установленному на входном отверстии. После поступления воздуха двигатель работает аналогично классическому.
Некоторые самолеты летают на турбовинтовых двигателях, устройство которых гораздо проще, чем устройство ТРД. Поэтому у многих возникает вопрос: зачем использовать более сложные установки, если можно ограничиться винтовой? Ответ прост: ТРД превосходят винтовые двигатели по мощности. Они мощнее в десятки раз. Соответственно, ТРД выдает гораздо большую тягу. Благодаря этому обеспечивается возможность поднимать в воздух большие самолеты и осуществлять перелеты на высокой скорости.
Центробежная ступень компрессора ТВаД.
Сегодня продолжаем серию рассказов о типах авиационных двигателей.
Как известно, основной узел любого газотурбинного двигателя ( ГТД) – это турбокомпрессор. В нем компрессор работает в связке с турбиной, которая его вращает. Функции турбины этим могут и ограничиться. Тогда вся оставшаяся полезная энергия газового потока, проходящего через двигатель, срабатывается в выходном устройстве (реактивном сопле). Как говорил мой преподаватель «спускается на ветер» :-). Тем самым создается реактивная тяга и ГТД становится обычным турбореактивным двигателем (ТРД).
Но можно сделать и по-другому. Турбину ведь можно заставить кроме компрессора вращать и другие нужные агрегаты, используя ту самую оставшуюся полезную энергию. Это может быть, например, самолетный воздушный винт . В этом случае ГТД становится уже турбовинтовым двигателем , в котором 10-15% энергии все же расходуется «на воздух» :-), то есть создает реактивную тягу.
Принцип работы турбовального двигателя.
Но если вся полезная энергия в двигателе срабатывается на валу и через него передается для привода агрегатов, то мы уже имеем так называемый турбовальный двигатель (ТваД).
Такой двигатель чаще всего имеет свободную турбину. То есть вся турбина как бы поделена на две части, между собой механически несвязанные. Связь между ними только газодинамическая. Газовый поток, вращая первую турбину, отдает часть своей мощности для вращения компрессора и далее, вращая вторую, тем самым через вал этой (второй) турбины приводит в действие полезные агрегаты. Сопла на таком двигателе нет. То есть выходное устройство для отработанных газов конечно имеется, но соплом оно не является и тяги не создает. Просто труба… Зачастую еще и искривленная :-).
Компоновка двигателя Arriel 1E2.
Турбовальный двигатель ARRIEL 1E2.
Eurocopter BK 117 c 2-мя турбовальными двигателями Arriel 1E2.
Выходной вал ТваД, с которого снимается вся полезная мощность, может быть направлен как назад, через канал выходного устройства, так и вперед, либо через полый вал турбокомпрессора, либо через редуктор вне корпуса двигателя.
Компоновка двигателя Arrius 2B2.
Турбовальный двигатель ARRIUS 2B2.
Eurocopter EC 135 с 2-мя турбовальными двигателями Arrius 2B2.
Надо сказать, что редуктор – непременная принадлежность турбовального двигателя. Ведь скорость вращения как ротора турбокомпрессора, так и ротора свободной турбины велика настолько, что это вращение не может быть напрямую передано на приводимые агрегаты. Они просто не смогут выполнять свои функции и даже могут разрушиться. Поэтому между свободной турбиной и полезным агрегатом обязательно ставится редуктор для снижения частоты вращения приводного вала.
Компоновка двигателя Makila 1A1.
Турбовальный двигатель MAKILA 1A1
Eurocopter AS 332 Super Puma с 2-мя турбовальными двигателями Makila 1A1
Компрессор у ТваД может быть осевым (если двигатель мощный) либо центробежным . Часто компрессор бывает и смешанным по конструкции, то есть в нем есть как осевые, так и центробежные ступени. В остальном принцип работы этого двигателя такой же, как и у ТРД. Примером разнообразия конструкций ТваД могут служить двигатели известной французской двигателестроительной фирмы TURBOMEKA.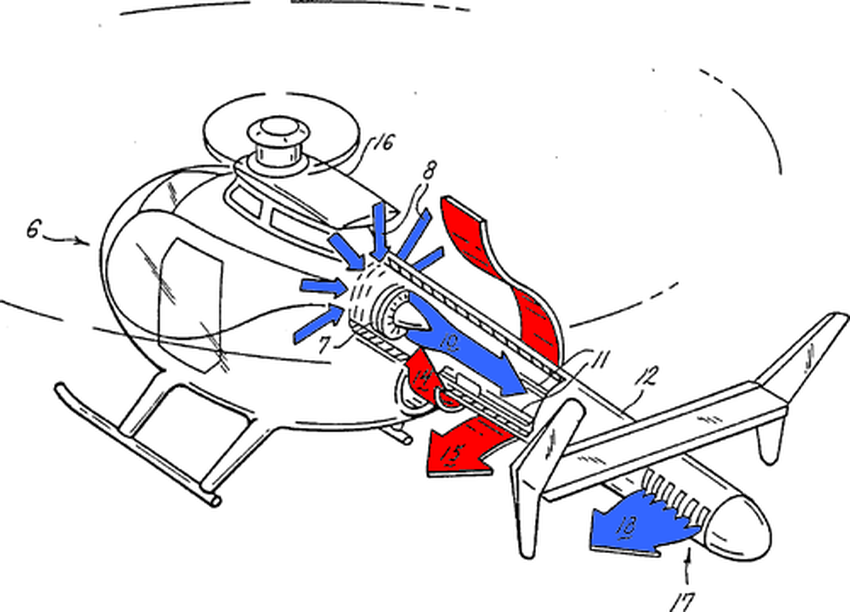 Здесь я представляю ряд иллюстраций на эту тему (их сегодня вообще много как-то получилось :-)… Ну много — не мало… :-)).
Здесь я представляю ряд иллюстраций на эту тему (их сегодня вообще много как-то получилось :-)… Ну много — не мало… :-)).
Компоновка двигателя Arrius 2K1
Турбовальный двигатель ARRIUS 2K1.
Вертолет Agusta A-109S с 2-мя турбовальными двигателями Arrius 2K1.
Основное свое применение турбовальный двигатель находит сегодня конечно же в авиации, по большей части на вертолетах . Его часто и называют вертолетный ГТД. Полезная нагрузка в этом случае – несущий винт вертолета. Известным примером ( кроме французов :-))могут служить широко распространенные до сих пор отличные классические вертолеты МИ-8 и МИ-24 с двигателями ТВ2-117 и ТВ3-117.
Вертолет МИ-8Т с 2-мя турбовальными двигателями ТВ2-117.
Турбовальный двигатель ТВ2-117.
Вертолет МИ-24 с 2-мя турбовальными двигателями ТВ3-117.
Турбовальный двигатель ТВ3-117 для вертолета МИ-24.
Кроме того ТваД может применяться в качестве вспомогательной силовой установки (ВСУ, о ней подробнее в следующей статье :-)), а также в виде специальных устройств для запуска двигателей. Такие устройства представляют собой миниатюрный турбовальный двигатель, свободная турбина которого раскручивает ротор основного двигателя при его запуске. Называется такое устройство турбостартер. В качестве примера могу привести турбостартер ТС-21, используемый на двигателе АЛ-21Ф-3, который устанавливается на самолеты СУ-24, в частности на мой родной СУ-24МР :-)…
Такие устройства представляют собой миниатюрный турбовальный двигатель, свободная турбина которого раскручивает ротор основного двигателя при его запуске. Называется такое устройство турбостартер. В качестве примера могу привести турбостартер ТС-21, используемый на двигателе АЛ-21Ф-3, который устанавливается на самолеты СУ-24, в частности на мой родной СУ-24МР :-)…
Двигатель АЛ-21Ф-3 с турбостартером ТС-21.
Турбостартер ТС-21, снятый с двигателя.
Фронтовой бомбардировщик СУ-24М с 2-мя двигателями АЛ-21Ф-3.
Однако, говоря о турбовальных двигателях, нельзя не сказать о совсем неавиационном направлении их использования. Дело в том, что ведь изначально газотурбинный двигатель не был монополией авиации. Главный его рабочий орган, газовая турбина, создавался задолго до появления самолетов. И предназначался ГТД для целей более прозаических, нежели полеты в воздушной стихии :-). Эта самая воздушная стихия его все же завоевала. Однако неавиационное приземленное предназначение существует и серьезности своей не потеряло, скорее наоборот.
Однако неавиационное приземленное предназначение существует и серьезности своей не потеряло, скорее наоборот.
На земле, так же как и в воздухе ГТД (турбовальный двигатель) применяется на транспорте.
Первое – это перекачка природного газа по крупным магистралям через газоперекачивающие станции. ГТД используются здесь в качестве мощных насосов.
Второе – это водный транспорт. Суда, использующие турбовальные газотурбинные двигатели называют газотурбоходы. Это чаще всего суда на подводных крыльях, у которых гребной винт приводит в движение турбовальный двигатель механически через редуктор или электрически через генератор, который он вращает. Либо это суда на воздушной подушке, которая создается при помощи ГТД.
Газотурбоход «Циклон-М» с 2-мя газотурбинными двигателями ДО37.
Пасажирских газотурбоходов за российскую историю было всего два. Последнее очень перспективное судно «Циклон-М» появилось в очень неудобное для себя время в 1986 году.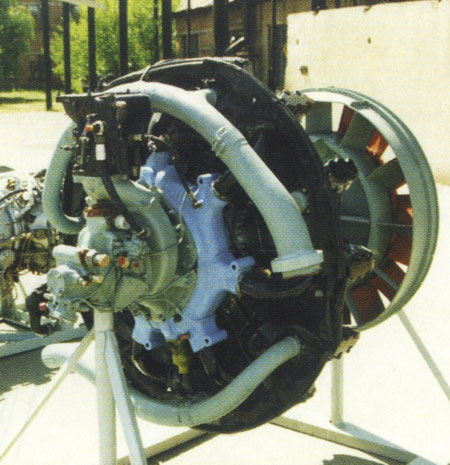 Успешно пройдя все испытания, оно «благополучно» перестало существовать для России. Перестройка… Более таких судов не строили. Зато у военных в этом плане дела обстоят несколько лучше. Чего стоит один только десантный корабль «Зубр», самое большое в мире судно на воздушной подушке.
Успешно пройдя все испытания, оно «благополучно» перестало существовать для России. Перестройка… Более таких судов не строили. Зато у военных в этом плане дела обстоят несколько лучше. Чего стоит один только десантный корабль «Зубр», самое большое в мире судно на воздушной подушке.
Десантный корабль на воздушной подушке «Зубр» с газотурбинными двигателями.
Третье – это железнодорожный транспорт. Локомотивы на которых стоят турбовальные газотурбинные двигатели, называют газотурбовозы. На них используется так называемая электрическая передача. ГТД вращает электрогенератор, а вырабатываемый им ток, в свою очередь, вращает электродвигатели, приводящие локомотив в движение. В 60-е годы прошлого века в СССР проходили довольно успешную опытную эксплуатацию три газотурбовоза. Два пассажирских и один грузовой. Однако они не выдержали соревновавния с электровозами и в начале 70-х проект был свернут. Но в 2007 году по инициативе ОАО «РЖД» был изготовлен опытный образец газотурбовоза с ГТД, работающем на сжиженном природном газе (опять криогенное топливо :-)).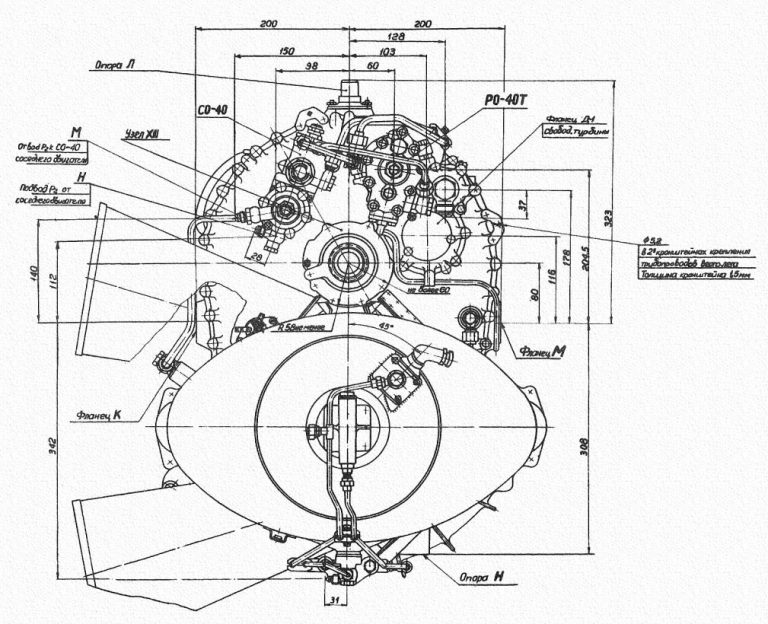 Газотурбовоз успешно прошел испытания, планируется его дальнейшая эксплуатация.
Газотурбовоз успешно прошел испытания, планируется его дальнейшая эксплуатация.
И наконец четвертое, самое, наверное, экзотическое… Танки. Грозные боевые машины. На сегодняшний момент достаточно широко известны два типа ныне использующихся боевых танков с газотурбинными двигателями. Это американский М1 Abrams и российский Т-80.
Танк M1A1 Abrams с газотурбинным двигателем AGT-1500.
Во всех вышеописанных случаях применения ГТД (суть турбовальный двигатель), он обычно заменяет дизельный двигатель. Это происходит потому, что (как я уже описывал здесь) при одинаковых размерах турбовальный двигатель значительно превосходит дизельный по мощности, имеет гораздо меньший вес и шумность.
Танк Т-80 с газотурбинным двигателем ГТД-1000Т.
Однако у него есть и крупный недостаток.Он обладает сравнительно низким коэффициентом полезного действия, что обуславливает большой расход топлива. Это естественно снижает запас хода любого транспортного средства (и танка в том числе :-)). Кроме того он чувствителен к грязи и посторонним предметам, всасываемым вместе с воздухом. Они могут повредить лопатки компрессора. Поэтому приходится создавать достаточно объемные системы очистки при использовании такого двигателя.
Кроме того он чувствителен к грязи и посторонним предметам, всасываемым вместе с воздухом. Они могут повредить лопатки компрессора. Поэтому приходится создавать достаточно объемные системы очистки при использовании такого двигателя.
Эти недостатки достаточно серьезны. Именно поэтому турбовальный двигатель получил гораздо большее распространение в авиации, чем в наземном транспорте. Там этот трудяга-движок, ничего не пуская «на ветер» :-), заставляет подниматься в воздух вертолеты . И они в родной для них стихии из несуразных, на первый взгляд, машин превращаются в изумительные по красоте и возможностям творения рук человеческих… Все-таки авиация – это здорово :-)…
P.S. Вы только посмотрите, что они вытворяют!
Все фотографии и схемы кликабельны.
Сегодня среднестатистический обыватель знаком с устройством и принципом работы мотора внутреннего сгорания, а вот газотурбинный двигатель, приводит пользователя в тупик. Тем не менее принцип действия турбинного агрегата намного проще поршневого мотора. Из-за особенностей эксплуатации, первый нашёл применение в авиации, второй установлен на 90% штатных автомобилей.
Тем не менее принцип действия турбинного агрегата намного проще поршневого мотора. Из-за особенностей эксплуатации, первый нашёл применение в авиации, второй установлен на 90% штатных автомобилей.
По классификации, силовая установка относится к тепловым устройствам, поскольку трансформирует выделившийся напор от горения в работу механики. В противовес агрегату с поршнями, проходящее преобразование течёт в непрерывной газовой струе, а это влияет на конструкцию и эксплуатацию. Попытки установить газотурбинный мотор на машины предпринимаются постоянно, однако массового развития идея не получила.
Газотурбинный двигатель:
Как уже говорилось раньше, предпринимались попытки использовать газотурбинный двигатель для автомобиля, однако дальше испытаний дело не пошло. Единственная отрасль, в которой агрегат нашёл применение – авиация.
Если сравнивать газотурбинный мотор с иными силовыми установками, то у первого изделия значение вырабатываемой мощи по отношению к массе больше. Так же плюс в используемом топливе, доведённый до мелкодисперсного состояния, ассортимент воображает, главный вид – керосин и дизель. Но возможно применение: бензина, газа, спирта, мазута, угольной пыли и т.п.
Так же плюс в используемом топливе, доведённый до мелкодисперсного состояния, ассортимент воображает, главный вид – керосин и дизель. Но возможно применение: бензина, газа, спирта, мазута, угольной пыли и т.п.
Агрегат с поршнями и газотурбинная установка, это моторы, работающие на основе тепла, преобразующие энергию, выделившуюся при горении в работу механики. Разница между устройствами заключается в течение процесса. В обоих моторах происходит забор и воздушное сдавливание, после чего подаётся порция горючего, затем субстанция горит, увеличивается и сбрасывается атмосферную среду.
В поршневых установках описанные действия происходят в одной точке – камере сгорания, при этом соблюдается очерёдность действий. Для газотурбинного двигателя характерно протекание действий в нескольких частях механизма одновременно.
Что бы понять, как работает газотурбинный двигатель, разделяют этапы протекания процессов, которые в сумме составляют преобразование топлива в работу:
За счёт прохождения атмосферного воздуха через компрессорное колесо, смесь сжимается в объёме, увеличивая напор, до сорока раз. После происходит перетекание воздуха в горящий объём, куда подаётся и топливо. Перемешиваясь с воздушной массой и сгорая, смесь энергетически преобразуется.
После происходит перетекание воздуха в горящий объём, куда подаётся и топливо. Перемешиваясь с воздушной массой и сгорая, смесь энергетически преобразуется.
Выделившуюся силу переформатируют в работу механики. Для этого используют специальные лопатки, которые вращаются в газовой струе, выходящей с напором.
Распределяя полученную работу, задействуют её кусок в сдавливании очередной воздушной порции, оставшаяся мощь отводится для привода механизма.
Таким образом, видно, что действие газотурбинного устройства сопровождается оборачиванием и это единственное перемещение в установке. Тогда как для других видов силовых агрегатов действию сопутствует перемещение вытеснителя. Учитывая, что габариты и масса газотурбинного агрегата меньше поршневого собрата, а полезный коэффициент и мощь выше, превосходство первого очевидно. Однако увеличенный аппетит и сложность эксплуатации нивелируют преимущества. С целью экономии горючего, установки применяют устройство обмена теплом.
Схема включения в процесс турбины:
Газотурбинный двигатель принцип работы
Смысл двигателестроения, достижение повышенного значения полезного коэффициента. В нашем случае, требуемые результаты, напрямую связаны с горением смеси и при этом обширном выделении тепла. Это не так просто, как кажется, основополагающее препятствие – материал изделия, которому сложно выдержать температуру и напор. По этой причине, проведено много расчётов, направленных на снятие тепла с турбины и применение в ином русле. Усилия не пропали даром, повторное использование энергии стало возможным и нагревало сжатые воздушные массы перед горением, а не терялось зря. Без таких устройств «теплообменников» достичь значений полезного действия было бы не возможно.
В нашем случае, требуемые результаты, напрямую связаны с горением смеси и при этом обширном выделении тепла. Это не так просто, как кажется, основополагающее препятствие – материал изделия, которому сложно выдержать температуру и напор. По этой причине, проведено много расчётов, направленных на снятие тепла с турбины и применение в ином русле. Усилия не пропали даром, повторное использование энергии стало возможным и нагревало сжатые воздушные массы перед горением, а не терялось зря. Без таких устройств «теплообменников» достичь значений полезного действия было бы не возможно.
Для достижения повышенных показателей мощи, турбинные лопатки раскручивают до как можно больших показателей. Скорость вращения обусловлена напором выходящих газов. Чем меньше размер установки, тем выше частота оборотов, поскольку только так достигается стабильность работы.
Газотурбинный двигатель Т 80:
Если сравнивать газотурбинный двигатель с мотором, который применяют на автомобиле, устройство первого проще. Агрегат включает камеру, где происходит сгорание; присутствуют свечи, поджигающие заряд; форсунка, участвующая в смесеобразовании. На одном валу помещены турбинные колёса и нагнетатель. Присутствуют: редуктор понижения, устройство обмена теплом, трубки, коллектор впуска, сопло и концентратор.
Агрегат включает камеру, где происходит сгорание; присутствуют свечи, поджигающие заряд; форсунка, участвующая в смесеобразовании. На одном валу помещены турбинные колёса и нагнетатель. Присутствуют: редуктор понижения, устройство обмена теплом, трубки, коллектор впуска, сопло и концентратор.
Вращаясь на компрессорном валу, лопатки втягивают воздушную массу, используя коллектор впуска. Достигнув скорости вращения 0,5 км/с, нагнетатель затягивает воздух в концентратор. В конечной точке скоростной режим падает, однако сдавливание массы повышается. Далее воздушная масса перетекает в устройство температурного обмена для набора температуры и перехода в область горения. В пространство параллельно с воздушной массой постоянно поступает горючее, за это отвечают распылители. Перемешиваясь, масса и горючее образуют рабочую консистенцию, которая после приготовления воспламеняется свечой. Горение поднимает напор объёма, газы, вырываясь сквозь концентратор, сталкиваются с турбинными лопатками, двигая колесо. Импульс, создаваемый окружностью, передаётся посредством редуктора на движущий элемент, а газовый остаток перетекает в устройство обмена теплом, подогревая там сдавленные воздушные массы и выбрасываясь в среду окружения.
Импульс, создаваемый окружностью, передаётся посредством редуктора на движущий элемент, а газовый остаток перетекает в устройство обмена теплом, подогревая там сдавленные воздушные массы и выбрасываясь в среду окружения.
Газотурбинный мотор «ДР59Л»:
Минус установки, цена материала, способного выдержать температуру. Кроме того, чтобы исключить поломку, поступающий в агрегат воздух требует повышенной степени очистки. Несмотря на это, доработка и усовершенствование агрегата проводятся постоянно. Расширяется сфера применения, сегодня построена автомобильная, авиационная установка, и даже газотурбинный двигатель для кораблей.
Газотурбинный агрегат способен вырабатывать большой момент, а значит повышенные показатели мощности. Для охлаждения сопутствующих элементов нет каких-либо устройств, поскольку соприкасающихся поверхностей мало. В то же время, подшипников используется не много, а качество деталей свидетельствует о надёжности и безотказности агрегата.
Отрицательный аспект, это дороговизна используемых материалов при изготовлении деталей и, как следствие, немалые вложения в починку механизма. Несмотря на недостатки, конструкция постоянно дорабатывается и совершенствуется.
Несмотря на недостатки, конструкция постоянно дорабатывается и совершенствуется.
Газотурбинный двигатель используют в авиации, на автомобилях установку применяют как эксперимент. Это произошло по причине постоянной потребности в охлаждении газов, поступающих на лопатки турбины. Это снижает полезное действие агрегата, увеличивая потребление горючего.
Главные преимущества мотора:
Танковая установка «ГТД-1500»:
Конструктивно газотурбинные силовые установки делят на четыре типа
Двигатель этого типа используют в авиационной промышленности, когда важен показатель скорости передвижения (например, военные самолёты). Работа происходит за счет выхода газов из сопла самолёта на повышенной скорости. Газы толкают транспорт и таким образом двигают изделие вперёд.
Конструктивным отличием с предшественником считается дополнительная турбинная секция. Устройство вращает винт, забирая энергию у газов, прошедших компрессорную турбину. Визуально, механизм представлен рядом лопаток, размещают деталь в передней или задней части. Для отвода выхлопа применяют отводящие патрубки. Аппарат предназначен для установки на летательных аппаратах, используемых на малых высотах и скоростях, может оснащаться биротативным воздушным винтом.
Для отвода выхлопа применяют отводящие патрубки. Аппарат предназначен для установки на летательных аппаратах, используемых на малых высотах и скоростях, может оснащаться биротативным воздушным винтом.
Турбовентиляторный двигатель «Д-27»:
Конструктивно, турбина похожа на предыдущую установку, различие во второй турбинной секции. Элемент отнимает энергию газов частично, как следствие, используются отводные выхлопные патрубки. Особенность агрегата, вентилятор активируется турбиной пониженного напора. По этой причине, второе название двигателя – «двухконтурный». Здесь внутренний контур образован воздушным потоком, идущим через агрегат, внешний контур создаёт направление, чтобы повысить эффект толчка вперёд. Последние выпуски летательных аппаратов применяют турбовентиляторные двигатели, поскольку механизмы надёжны и экономичны на больших высотах.
Конструктивно, установка похожа на предыдущий агрегат. Разница в том, что вал механизма приводит в действие многочисленные возможные элементы. Мотор получил распространение на вертолётах, танках, кораблях. Например, М90ФР, корабельный газотурбинный двигатель, устанавливаемый на фрегатах Российского флота. К таковым относятся: «Адмирал Горшков», «Дерзкий» и др.
Мотор получил распространение на вертолётах, танках, кораблях. Например, М90ФР, корабельный газотурбинный двигатель, устанавливаемый на фрегатах Российского флота. К таковым относятся: «Адмирал Горшков», «Дерзкий» и др.
Газотурбинный »:
Случается, что газотурбинная силовая установка применяется, как вспомогательное оборудование, например, автономный источник питания на борту. Простые агрегаты сжимают воздушные массы, отбираемые у турбинного компрессора, который запускает главные двигатели. Сложные установки вырабатывают электрическую энергию для нужд бортовой сети.
Впервые самолет с турбореактивным двигателем (ТРД) поднялся в воздух в 1939 году. С тех пор устройство двигателей самолетов совершенствовалось, появились различные виды, но принцип работы у всех них примерно одинаковый. Чтобы понять, почему воздушное судно, имеющий столь большую массу, так легко поднимается в воздух, следует узнать, как работает двигатель самолета. ТРД приводит в движение воздушное судно за счет реактивной тяги. В свою очередь, реактивная тяга является силой отдачи струи газа, которая вылетает из сопла. То есть получается, что турбореактивная установка толкает самолет и всех находящихся в салоне людей с помощью газовой струи. Реактивная струя, вылетая из сопла, отталкивается от воздуха и таким образом, приводит в движение воздушное судно.
ТРД приводит в движение воздушное судно за счет реактивной тяги. В свою очередь, реактивная тяга является силой отдачи струи газа, которая вылетает из сопла. То есть получается, что турбореактивная установка толкает самолет и всех находящихся в салоне людей с помощью газовой струи. Реактивная струя, вылетая из сопла, отталкивается от воздуха и таким образом, приводит в движение воздушное судно.
Устройство турбовентиляторного двигателя
Устройство двигателя самолета достаточно сложное. Рабочая температура в таких установках достигает 1000 и более градусов. Соответственно, все детали, из которых двигатель состоит, изготавливаются из устойчивых к воздействию высоких температур и возгоранию материалов. Из-за сложности устройства существует целая область науки о ТРД.
ТРД состоит из нескольких основных элементов:
- вентилятор;
- компрессор;
- камера сгорания;
- турбина;
- сопло.
Перед турбиной установлен вентилятор. С его помощью воздух затягивается в установку извне. В таких установках используются вентиляторы с большим количеством лопастей определенной формы. Размер и форма лопастей обеспечивают максимально эффективную и быструю подачу воздуха в турбину. Изготавливаются они из титана. Помимо основной функции (затягивания воздуха), вентилятор решает еще одну важную задачу: с его помощью осуществляется прокачка воздуха между элементами ТРД и его оболочкой. За счет такой прокачки обеспечивается охлаждение системы и предотвращается разрушение камеры сгорания.
В таких установках используются вентиляторы с большим количеством лопастей определенной формы. Размер и форма лопастей обеспечивают максимально эффективную и быструю подачу воздуха в турбину. Изготавливаются они из титана. Помимо основной функции (затягивания воздуха), вентилятор решает еще одну важную задачу: с его помощью осуществляется прокачка воздуха между элементами ТРД и его оболочкой. За счет такой прокачки обеспечивается охлаждение системы и предотвращается разрушение камеры сгорания.
Возле вентилятора расположен компрессор высокой мощности. С его помощью воздух поступает в камеру сгорания под высоким давлением. В камере происходит смешивание воздуха с топливом. Образующаяся смесь поджигается. После возгорания происходит нагрев смеси и всех расположенных рядом элементов установки. Камера сгорания чаще всего изготавливается из керамики. Это объясняется тем, что температура внутри камеры достигает 2000 градусов и более. А керамика характеризуется устойчивостью к воздействию высоких температур. После возгорания смесь поступает в турбину.
После возгорания смесь поступает в турбину.
Вид самолетного двигателя снаружи
Турбина представляет собой устройство, состоящее из большого количества лопаток. На лопатки оказывает давление поток смеси, приводя тем самым турбину в движение. Турбина вследствие такого вращения заставляет вращаться вал, на котором установлен вентилятор. Получается замкнутая система, которая для функционирования двигателя требует только подачи воздуха и наличия топлива.
Далее смесь поступает в сопло. Это завершающий этап 1 цикла работы двигателя. Здесь формируется реактивная струя. Таков принцип работы двигателя самолета. Вентилятор нагнетает холодный воздух в сопло, предотвращая его разрушение от чрезмерно горячей смеси. Поток холодного воздуха не дает манжете сопла расплавиться.
В двигателях воздушных судов могут быть установлены различные сопла. Наиболее совершенными считаются подвижные. Подвижное сопло способно расширяться и сжиматься, а также регулировать угол, задавая правильное направление реактивной струе. Самолеты с такими двигателями характеризуются отличной маневренностью.
Самолеты с такими двигателями характеризуются отличной маневренностью.
Двигатели для самолетов бывают различных типов:
- классические;
- турбовинтовые;
- турбовентиляторные;
- прямоточные.
Классические установки работают по принципу, описанному выше. Такие двигатели устанавливают на воздушных судах различной модификации. Турбовинтовые функционируют несколько иначе. В них газовая турбина не имеет механической связи с трансмиссией. Эти установки приводят самолет в движение с помощью реактивной тяги лишь частично. Основную часть энергии горячей смеси данный вид установки использует для привода воздушного винта через редуктор. В такой установке вместо одной присутствует 2 турбины. Одна из них приводит компрессор, а вторая – винт. В отличие от классических турбореактивных, винтовые установки более экономичны. Но они не позволяют самолетам развивать высокие скорости. Их устанавливают на малоскоростных воздушных судах. ТРД позволяют развивать гораздо большую скорость во время полета.
Турбовентиляторные двигатели представляют собой комбинированные установки, сочетающие элементы турбореактивных и турбовинтовых двигателей. Они отличаются от классических большим размером лопастей вентилятора. И вентилятор, и винт функционируют на дозвуковых скоростях. Скорость перемещения воздуха понижается за счет наличия специального обтекателя, в который помещен вентилятор. Такие двигатели более экономично расходуют топливо, чем классические. Кроме того, они характеризуются более высоким КПД. Чаще всего их устанавливают на лайнерах и самолетах большой вместительности.
Размер двигателя самолета относительно человеческого роста
Прямоточные воздушно-реактивные установки не предполагают использование подвижных элементов. Воздух втягивается естественным путем благодаря обтекателю, установленному на входном отверстии. После поступления воздуха двигатель работает аналогично классическому.
Некоторые самолеты летают на турбовинтовых двигателях, устройство которых гораздо проще, чем устройство ТРД. Поэтому у многих возникает вопрос: зачем использовать более сложные установки, если можно ограничиться винтовой? Ответ прост: ТРД превосходят винтовые двигатели по мощности. Они мощнее в десятки раз. Соответственно, ТРД выдает гораздо большую тягу. Благодаря этому обеспечивается возможность поднимать в воздух большие самолеты и осуществлять перелеты на высокой скорости.
Поэтому у многих возникает вопрос: зачем использовать более сложные установки, если можно ограничиться винтовой? Ответ прост: ТРД превосходят винтовые двигатели по мощности. Они мощнее в десятки раз. Соответственно, ТРД выдает гораздо большую тягу. Благодаря этому обеспечивается возможность поднимать в воздух большие самолеты и осуществлять перелеты на высокой скорости.
samoleting.ru
Принцип Действия Турбины Самолета. Проектирование изделий. informatik-m.ru
История создания и принцип работы турбореактивного двигателя
Реактивные авиадвигатели во второй половине XX века открыли новые возможности в авиации: полеты на скоростях, превышающих скорость звука, создание самолетов с высокой грузоподъемностью, сделали возможным массовые путешествия на большие расстояния. Турбореактивный двигатель по праву считается одним из самых важных механизмов ушедшего века, несмотря на простой принцип работы, пишет Ростех .
Первый самолет братьев Райт, самостоятельно оторвавшийся от Земли в 1903 году, был оснащен поршневым двигателем внутреннего сгорания.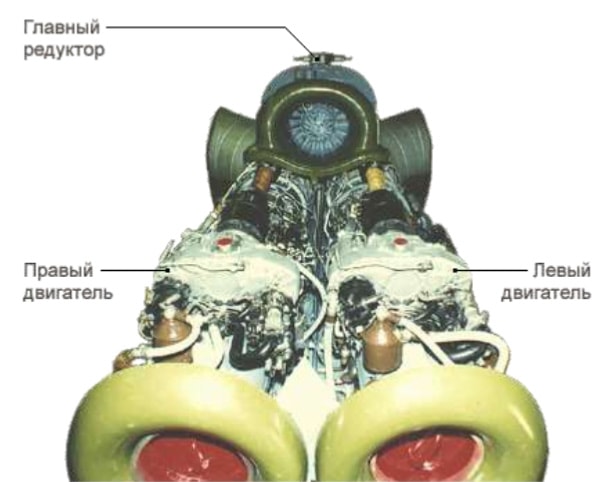 И на протяжении сорока лет этот тип двигателя оставался основным в самолетостроении. Но во время Второй мировой войны стало ясно, что традиционная поршнево-винтовая авиация подошла к своему технологическому пределу – как по мощности, так и по скорости. Одной из альтернатив был воздушно-реактивный двигатель.
И на протяжении сорока лет этот тип двигателя оставался основным в самолетостроении. Но во время Второй мировой войны стало ясно, что традиционная поршнево-винтовая авиация подошла к своему технологическому пределу – как по мощности, так и по скорости. Одной из альтернатив был воздушно-реактивный двигатель.
Идею применения реактивной тяги для преодоления земного притяжения впервые довел до практической осуществимости Константин Циолковский. Еще в 1903 году, когда братья Райт запускали свой первый самолет «Флайер-1», российский ученый опубликовал свой труд «Исследование мировых пространств реактивными приборами», в котором он разработал основы теории реактивного движения. Опубликованная в «Научном обозрении» статья утвердила за ним репутацию мечтателя и не была воспринята всерьез. Циолковскому потребовались годы трудов и смена политического строя, чтоб доказать свою правоту.
Реактивный самолет Су-11 с двигателями ТР-1, разработки КБ Люльки
Тем не менее, родиной серийного турбореактивного двигателя суждено было стать совсем другой стране – Германии. Создание турбореактивного двигателя в конце 1930-х было своеобразным хобби немецких компаний. В этой области отметились практически все известные ныне бренды: Heinkel, BMW, Daimler-Benz и даже Porsche. Основные лавры достались компании Junkers и ее первому в мире серийному турбореактивному двигателю 109-004, устанавливаемому на первый же в мире турбореактивный самолет Me 262.
Создание турбореактивного двигателя в конце 1930-х было своеобразным хобби немецких компаний. В этой области отметились практически все известные ныне бренды: Heinkel, BMW, Daimler-Benz и даже Porsche. Основные лавры достались компании Junkers и ее первому в мире серийному турбореактивному двигателю 109-004, устанавливаемому на первый же в мире турбореактивный самолет Me 262.
Несмотря на невероятно удачный старт в реактивной авиации первого поколения, немецкие решения дальнейшего развития нигде в мире не получили, в том числе и в Советском Союзе.
В СССР разработкой турбореактивных двигателей наиболее удачно занимался легендарный авиаконструктор Архип Люлька. Еще в апреле 1940 года он запатентовал собственную схему двухконтурного турбореактивного двигателя, позже получившую мировое признание. Архип Люлька не нашел поддержки у руководства страны. С началом войны ему вообще предложили переключиться на танковые двигатели. И только когда у немцев появились самолеты с турбореактивными двигателями, Люльке было приказано в срочном порядке возобновить работы по отечественному турбореактивному двигателю ТР-1.
Уже в феврале 1947 года двигатель прошел первые испытания, а 28 мая свой первый полет совершил реактивный самолет Су-11 с первыми отечественными двигателями ТР-1, разработки КБ А.М. Люльки, ныне филиала Уфимского моторостроительного ПО, входящего в Объединенную двигателестроительную корпорацию (ОДК).
Турбореактивный двигатель (ТРД) работает на принципе обычной тепловой машины. Не углубляясь в законы термодинамики, тепловой двигатель можно определить как машину для преобразования энергии в механическую работу. Этой энергией обладает так называемое рабочее тело – используемый внутри машины газ или пар. При сжатии в машине рабочее тело получает энергию, а при последующем его расширении мы имеем полезную механическую работу.
При этом понятно, что работа, затрачиваемая на сжатие газа должна быть всегда меньше работы, которую газ может совершить при расширении. Иначе никакой полезной «продукции» не будет. Поэтому газ перед расширением или во время него нужно еще и нагревать, а перед сжатием – охладить. В итоге за счет предварительного нагрева энергия расширения значительно повысится и появится ее излишек, который можно использовать для получения необходимой нам механической работы. Вот собственно и весь принцип работы турбореактивного двигателя.
В итоге за счет предварительного нагрева энергия расширения значительно повысится и появится ее излишек, который можно использовать для получения необходимой нам механической работы. Вот собственно и весь принцип работы турбореактивного двигателя.
Таким образом, любой тепловой двигатель должен иметь устройство для сжатия, нагреватель, устройство для расширения и охлаждения. Все это есть у ТРД, соответственно: компрессор, камера сгорания, турбина, а в роли холодильника выступает атмосфера.
Рабочее тело – воздух, попадает в компрессор и сжимается там. В компрессоре на одной вращающейся оси укреплены металлические диски, по венцам которых размещены так называемые «рабочие лопатки». Они «захватывают» наружный воздух, отбрасывая его внутрь двигателя.
Далее воздух поступает в камеру сгорания, где нагревается и смешивается с продуктами сгорания (керосина). Камера сгорания опоясывает ротор двигателя после компрессора сплошным кольцом, либо в виде отдельных труб, которые называются жаровыми трубами. В жаровые трубы через специальные форсунки и подается авиационный керосин.
Камера сгорания опоясывает ротор двигателя после компрессора сплошным кольцом, либо в виде отдельных труб, которые называются жаровыми трубами. В жаровые трубы через специальные форсунки и подается авиационный керосин.
Из камеры сгорания нагретое рабочее тело поступает на турбину. Она похожа на компрессор, но работает, так сказать, в противоположном направлении. Ее раскручивает горячий газ по тому же принципу, как воздух детскую игрушку-пропеллер. Ступеней у турбины немного, обычно от одной до трех-четырех. Это самый нагруженный узел в двигателе. Турбореактивный двигатель имеет очень большую частоту вращения – до 30 тысяч оборотов в минуту. Факел из камеры сгорания достигает температуры от 1100 до 1500 градусов Цельсия. Воздух здесь расширяется, приводя турбину в движение и отдавая ей часть своей энергии.
После турбины – реактивное сопло, где рабочее тело ускоряется и истекает со скоростью большей, чем скорость встречного потока, что и создает реактивную тягу.
Поколения турбореактивных двигателей
Несмотря на то, что точной классификации поколений турбореактивных двигателей в принципе не существует, можно в общих чертах описать основные типы на различных этапах развития двигателестроения.
К двигателям первого поколения относят немецкие и английские двигатели времен Второй мировой войны, а также советский ВК-1, который устанавливался на знаменитый истребитель МИГ-15, а также на самолеты ИЛ-28 и ТУ-14.
ТРД второго поколения отличаются уже возможным наличием осевого компрессора, форсажной камеры и регулируемого воздухозаборника. Среди советских примеров двигатель Р-11Ф2С-300 для самолета МиГ-21.
Двигатели третьего поколения характеризуются увеличенной степенью сжатия, что достигалось увеличением ступеней компрессора и турбин, и появлением двухконтурности. Технически это самые сложные двигатели.
Появление новых материалов, которые позволяют значимо поднять рабочие температуры, привело к созданию двигателей четвертого поколения. Среди таких двигателей – отечественный АЛ-31 разработки ОДК для истребителя Су-27.
Сегодня на уфимском предприятии ОДК начинается выпуск авиационных двигателей пятого поколения. Новые агрегаты установят на истребитель Т-50 (ПАК ФА), который приходит на смену Су-27.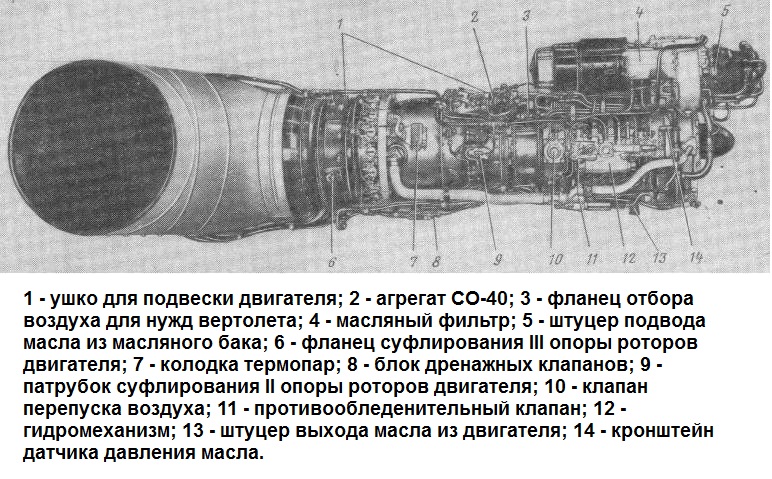 Новая силовая установка на Т-50 с увеличенной мощностью сделает самолет еще более маневренным, а главное – откроет новую эпоху в отечественном авиастроении.
Новая силовая установка на Т-50 с увеличенной мощностью сделает самолет еще более маневренным, а главное – откроет новую эпоху в отечественном авиастроении.
Реактивный двигатель был изобретен Гансом фон Охайном (Dr. Hans von Ohain). выдающимся немецким инженером-конструкторм и Фрэнком Уиттлом (Sir Frank Whittle). Первый патент на работающий газотурбинный двигатель, был получен в 1930 году Фрэнк Уиттлом. Однако первую рабочую модель собрал именно Охайн.
2 августа 1939 года в небо поднялся первый реактивный самолет — He 178 (Хейнкель 178), снаряженный двигателем HeS 3, разработанный Охайном.
Устройство реактивного двигателя достаточно просто и одновременно крайне сложно. Просто по принципу действия: забортный воздух (в ракетных двигателях — жидкий кислород) засасывается в турбину, там смешивается с топливом и сгорая, в конце турбины образует т.н. “рабочее тело” (реактивная струя), которое и двигает машину.
Так все просто, но на деле — это целая область науки, ибо в таких двигателях рабочая температура достигает тысяч градусов по Цельсию. Одна из самых главных проблем турбореактивного двигателестроения — создание не плавящихся деталей, из плавящихся металлов. Но для того, что бы понять проблемы конструкторов и изобретателей нужно сначала более детально изучить принципиальное устройство двигателя.
основные детали реактивного двигателя
В начале турбины всегда стоит вентилятор. который засасывает воздух из внешней среды в турбины. Вентилятор обладает большой площадью и огромным количеством лопастей специальной формы, сделанных из титана. Основных задач две — первичный забор воздуха и охлаждение всего двигателя в целом, путем прокачивание воздуха между внешней оболочкой двигателя и внутренними деталями. Это охлаждает камеры смешивания и сгорания и не дает им разрушится.
Сразу за вентилятором стоит мощный компрессор. который нагнетает воздух под большим давлением в камеру сгорания.
который нагнетает воздух под большим давлением в камеру сгорания.
Камера сгорания выполняет еще и роль карбюратора, смешивая топливо с воздухом. После образования топливо воздушной смеси она поджигается. В процессе возгорания происходит значительный разогрев смеси и окружающих деталей, а также объемное расширение. Фактически реактивный двигатель использует для движения управляемый взрыв.
Камера сгорания реактивного двигателя одна из самых горячих его частей — её необходимо постоянно интенсивное охлаждение. Но и этого недостаточно. Температура в ней достигает 2700 градусов, поэтому её часто делают из керамики.
После камеры сгорания горящая топливо-воздушная смесь направляется непосредственно в турбину.
Турбина состоит из сотен лопаток, на которые давит реактивный поток, приводя турбину во вращение. Турбина в свою очередь вращает вал, на котором “сидят” вентиллятор и компрессор.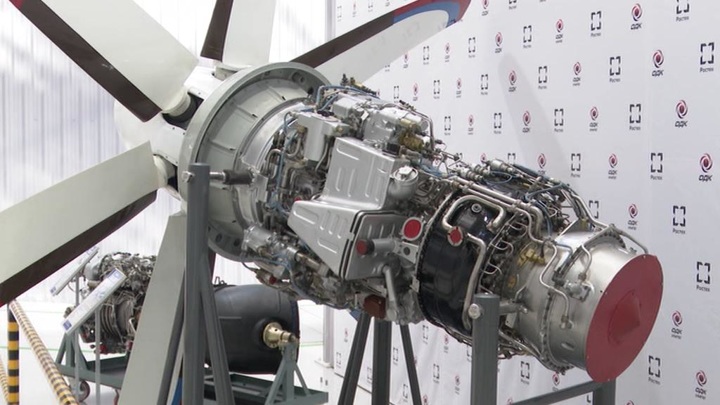 Таким образом система замыкается и требует лишь подвода топлива и воздуха для своего функционироваия.
Таким образом система замыкается и требует лишь подвода топлива и воздуха для своего функционироваия.
После турбины поток направляется в сопло. Сопло реактивного двигателя — последняя, но далеко не по значению часть реактивного двигателя. Оно формирует непосредственно реактивную струю. В сопло направляется холодный воздух, нагнетаемый вентиллятором для охлаждения внутренних деталей двигателя. Этот поток ограничивает манжету сопла от сверхгорячего реактивного потока и ее дает ей расплавится.
Сопла у реактивных двигателей бывают самые разные. Самым передовым считает подвижное сопло, стоящее на двигателях с отклоняемым вектором тяги. Оно может сжиматься и расширятся, а также отклонятся на значительные углы, регулируя и направляя непосредственно реактивный поток. Это делает самолеты с двигателями с отклоняемым вектором тяги очень маневренными, т.к. маневрирование происходит не только благодаря механизмам крыла, но и непосредственно двигателем.
Классический реактивный двигатель самолета F-15
Классический реактивный двигатель — принципиальное устройство которого мы описыали выше. Используется в основном на истребителях в различных модификациях.
Турбовинтовой двигатель. В этом типе двигателя мощность турбины через понижающий редуктор направляется на вращение классического винта. Такие двигатели позволят большим самолетам летать на приемлемых скоростях и тратить меньше горючего. Нормальной крейсерской скоростью турбовинтового самолета считается 600—800 км/ч.
Прямоточный воздушно-реактивный двигатель (Ramjet)
Прямоточный воздушно-реактивный двигатель
Работает без подвижных деталей. Воздух нагнетается в камеру сгорания естественным способом, за счет торможения потока об обтекатель входного отверстия.
Далее все происходит так же как в обычном реактивном двигателе — воздух смешивается с горючим и выходит в виде реактивной струи из сопла.
Использовался на поездах, самолетах, БЛА, и в боевых ракетах, а также на велосипедах и скутерах.
И напоследок — видео работы реактивного двигателя:
Картинки взяты из различных источников. Русификация картинок — Лаборатори 37.
Источники: http://military-industry.ru/missilery/1425, http://lab-37.com/science_world/turbojet/
Комментариев пока нет!
informatik-m.ru
Принцип работы турбореактивного двигателя самолёта
Совершая полет в самолете в большинстве случаев люди никогда не задумываются о том, как работает его двигатель. Но на самом деле о работе двигателя и реактивной тяги с помощью, которой работает сам двигатель, знали ее в Античное время. Но применить эти знания на практике смогли не так давно, так как раньше не технологии не позволяли никому достичь его исправной работы. Гонка вооружения между Англией и Германией стала толчком к созданию ТРД (турбореактивного двигателя).
Гонка вооружения между Англией и Германией стала толчком к созданию ТРД (турбореактивного двигателя).
В работе ТРД самолета нет никаких сложностей, принцип его работы может понять почти каждый человек. Но данный двигатель имеет несколько нюансов, их соблюдение контролируется под строгим присмотром руководства. Для того чтобы авиалайнер смог держаться в небе, необходима идеальная работа двигателя. Так как от работы двигателя напрямую зависят жизни пассажиров находящихся на борту авиатранспорта.
За работу двигателя отвечает реактивная тяга. Для создания реактивной тяги необходима определенная жидкость, которая подается из задней части двигателя и по ходу ее продвижения увеличивается ее скорость движения вперед. Работу тяги отлично объясняет один из законов Ньютона, звучит он так «Любое действия вызывает равное противодействие».
Вместо жидкости в ТРД используется горючая смесь (газы и воздух со сгоревшими частичками топлива). Благодаря этой смеси самолет толкает вперед и позволяет ему лететь дальше.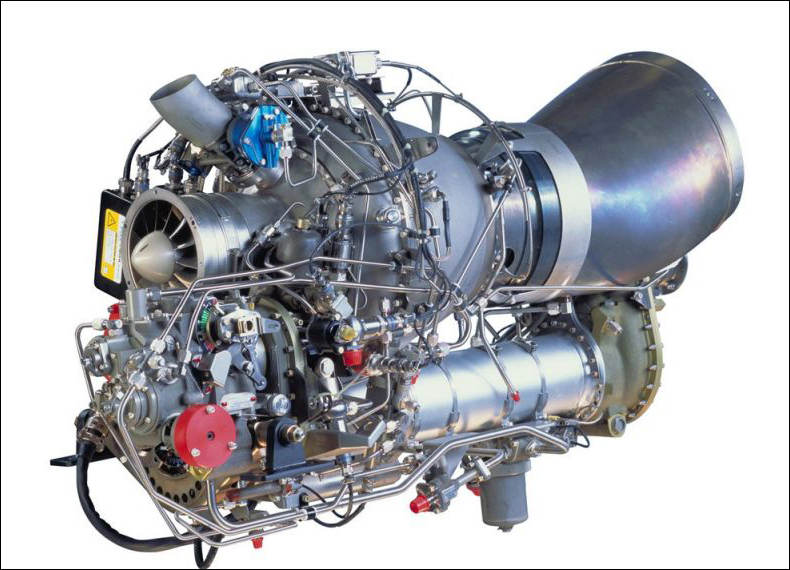
Разработки таких двигателей начались в тридцатых годах. Первыми кто начал разрабатывать двигатели такого типа стали немцы и англичане. Но в гонке вооружений одержали победу ученные из Германии, так как они выпустили самый первый в мире самолет с ТРД под названием «Ласточка», данный самолет впервые взлетел в небеса над Люфтваффом. Спустя некоторое время появился и Английский самолет «Глостерский метеор»
Также сверхзвуковые двигатели принято считать турбореактивными, но они отличаются более совершенными модификациями, в отличие от ТРД.
Устройство двигателя имеет четыре главные детали, а именно:
- Компрессор.
- Камера горения.
- Турбина.
- Выхлоп.
В компрессоре находиться несколько турбин, с помощью которых происходит засасывание и сжатие воздуха. Во время сжатия воздуха, его давление и температура начинает нагнетаться и расти.
После того как воздух проходит турбину и его сжимает до необходимых размеров. Часть сжатого воздуха поступает в камеру горения, где воздух начинает смешиваться с топливом, после чего его поджигают. Благодаря этому увеличивается тепловая энергия воздуха. После смесь выходит из камеры с большой скорости и расширяется.
Благодаря этому увеличивается тепловая энергия воздуха. После смесь выходит из камеры с большой скорости и расширяется.
После выхода эта смесь снова попадает в турбину, с помощью высокой энергии газа лопасти в турбине начинают свое вращение. Турбина тесно связанна с компрессором, который находиться в начале двигателя. Благодаря этому турбина начинает свою работу. Остатки воздуха выходят в выхлоп. В момент выхода смеси температура достигает рекордных размеров. Но она продолжает повышать свою температуру с помощью эффекта Дросселирования. После того как температура воздуха доходит до своего пика, она начинает идти на спад и выходит из турбины.
В отличие от реактивного двигателя, который пользуется спросом почти у всех самолетов, турбореактивный двигатель больше подходит для пассажирских авиалайнеров. Так как для работы реактивного двигателя необходимо не только топливо, но и окислитель.
Благодаря своему строению окислитель поступает вместе с топливом из бака. А в случаи с ТРД окислитесь, поступает напрямую из атмосферы. А в остальном их работа совершенно идентична и не отличается друг от друга.
А в остальном их работа совершенно идентична и не отличается друг от друга.
У турбореактивного двигателя главной деталью является лопасть турбины, так как от ее исправной работы напрямую зависит мощность двигателя. Благодаря этим лопастям и образуется тяга, которая необходима для поддержания скорости самолета. Если сравнить одну лопасть с автомобильным двигателем, то она сможет обеспечить мощностью целых десять машин.
Лопасти устанавливаются за камерой сгорания, так как там нагнетается самое высокое давления, также температура воздуха в данной части двигателя может доходить до 1400 градусов Цельсия.
В целях улучшения прочности и устойчивости лопасти перед различными факторами их монокристаллизируют, благодаря этому они могут держать высокую температуру и давление. Прежде чем установить такой двигатель на самолет его тестируют на полном тяговом усилителе. Также двигатель должен получить сертификат от Европейского совета по безопасности.
В период холодной войны в мире были попытки создания атомного двигателя, за основу был взят турбореактивный двигатель. Главной задумкой ученых было создание двигателя, основанного не на химической реакции радиоактивных веществ, а на вырабатываемом тепле от ядерного реактора. Он должен был находиться на месте камеры сгорания.
Главной задумкой ученых было создание двигателя, основанного не на химической реакции радиоактивных веществ, а на вырабатываемом тепле от ядерного реактора. Он должен был находиться на месте камеры сгорания.
В теории воздух должен был проходить через работающую зону реактора, благодаря этому реактор должен был остужаться, а температура воздуха наоборот возрастать. После чело воздух должен был расширяться и выходить через сопла (выхлоп) на этот момент скорость воздуха должна была превышать скорость полета самолета.
В Советском союзе были попытки проведения испытаний подобного двигателя, также ученные в соединенных штатах Америки, вели разработку данного двигателя, и их работа почти подходила к тестам двигателя на настоящем самолете.
Но по ряду причин разработки этого двигателя было решено закрыть. Так как у двигателя было множество недостатков, а именно:
- Пилоты были подвержены постоянному радиоактивному облучению на протяжении всего полета.
- Вместе с воздухом через сопла выходили и частички радиоактивного элемента в атмосферу.
- В том случае если самолет терпел крушение, был очень большой шанс взрыва радиоактивного реактора, что влекло за собой радиоактивное отравление на довольно большой площади.

vpolete.online
Путешествуя на самолетах, вы задумывались когда-нибудь о том, как работает двигатель реактивного самолета? О реактивной тяге, которая приводит его в действие, знали еще в Античные времена. Применить же ее на практике смогли только в начале прошлого века, в результате гонки вооружений между Англией и Германией.
Принцип работы двигателя реактивного самолета довольно прост, но имеет некоторые нюансы, которые строго соблюдаются при их производстве. Чтобы самолет смог надежно держаться в воздухе, они должны работать идеально. Ведь от этого зависят жизни и безопасность всех, кто находится на борту самолета.
Его приводит в действие реактивная тяга. Для этого нужна какая-то жидкость, выталкиваемая из задней части системы и придающая ей движение вперед. Здесь работает третий закон Ньютона, который гласит: “Любое действие вызывает равное противодействие”.
У реактивного двигателя вместо жидкости применяется воздух. Он создает силу, обеспечивающую движение.
В нем используются горячие газы и смесь воздуха со сгораемым топливом. Эта смесь выходит из него с высокой скоростью и толкает самолет вперед, давая ему лететь.
Если говорить об устройстве двигателя реактивного самолета, то оно представляет из себя соединение четырех самых важных деталей:
- компрессора;
- камеры горения;
- турбины;
- выхлопа.
Компрессор состоит из нескольких турбин, которые засасывают воздух и сжимают его по мере прохождения через расположенные под углом лопасти. При сжатии температура и давление воздуха повышаются. Часть сжатого воздуха попадает в камеру горения, где смешивается с топливом и поджигается. Это увеличивает тепловую энергию воздуха.
Реактивный двигатель.
Горячая смесь на высокой скорости выходит из камеры и расширяется. Там она проходит через еще одну турбину с лопастями, которые вращаются, благодаря энергии газа.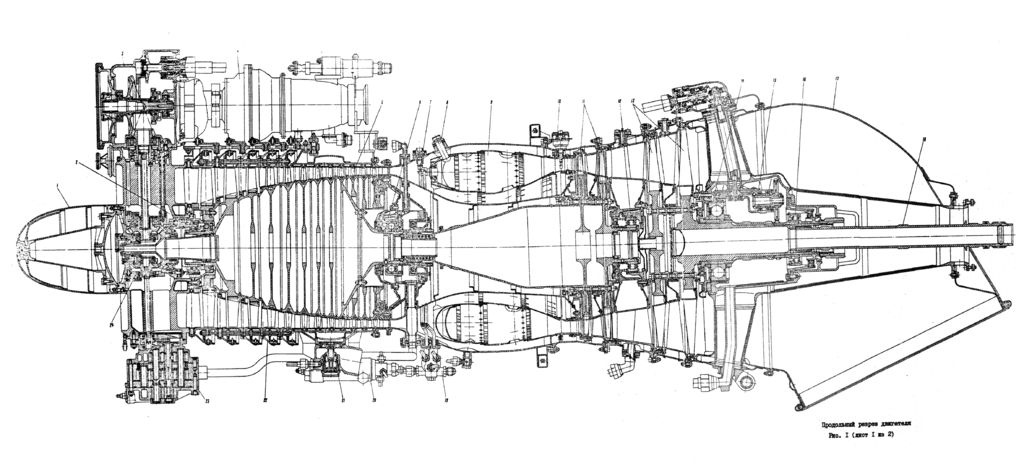
Турбина соединена с компрессором в передней части двигателя, и таким образом приводит его в движение. Горячий воздух выходит через выхлоп. К этому моменту температура смеси очень высока. И еще увеличивается, благодаря эффекту Дросселирования. После этого воздух выходит из него.
Разработка самолетов с реактивным двигателем началась в 30х годах прошлого века. Англичане и немцы начали разрабатывать подобные модели. В этой гонке победили немецкие ученые. Поэтому первым самолетом с реактивным двигателем стала “Ласточка” в Люфтваффе. “Глостерский метеор” поднялся в воздух немного позднее. О первых самолетах с такими двигателями подробно рассказано в этой статье.
Двигатель сверхзвукового самолета — тоже реактивный, но уже в совершенно другой модификации.
Реактивные двигатели применяются повсеместно, а турбореактивные устанавливаются больших пассажирских лайнерах. Отличие их в том, что первый несет с собой запас топлива и окислителя, а конструкция обеспечивает их подачу из баков.
Турбореактивный двигатель самолета несет с собой лишь топливо, а окислитель — воздух — нагнетается турбиной из атмосферы. В остальном принцип его работы совпадает с тем же, что и у реактивного.
Одна из самых важных деталей у них — это лопасть турбины. От нее зависит мощность двигателя.
Схема турбореактивного двигателя.
Именно они вырабатывают тяговые усилия, необходимые для ускорения самолета. Каждый из лопастей производит в 10 раз больше энергии, чем самый обычный, автомобильный двигатель. Они устанавливаются позади камеры сгорания, в той части двигателя, где самое высокое давление, а температура доходит до 1400 градусов по Цельсию.
В процессе производства лопастей они проходят через процесс монокристаллизации, что придает им твердости и прочности.
Перед тем, как установить на самолет, каждый двигатель проверяется на полное тяговое усилие. Он должен пройти сертификацию Европейского совета по безопасности и компанией, которая его произвела. Одной из самых крупных фирм по их производству является Роллс-Ройс.
Во время Холодной войны были предприняты попытки создания реактивного двигателя не на химической реакции, а на тепле, который бы вырабатывал ядерный реактор. Его ставили вместо камеры сгорания.
Воздух проходит через активную зону реактора, понижая его температуру и повышая свою. Он расширяется и истекает из сопла со скоростью, большей чем скорость полета.
Комбинированный турбреактивно-атомный двигатель.
В СССР проводились его испытания на базе ТУ-95. В США тоже не отставали от ученых в Советском Союзе.
В 60х годах исследования в обеих сторонах постепенно прекратились. Основными тремя проблемами, которые помешали разработке, стали:
- безопасность летчиков во время полета;
- выброс радиоактивных частиц в атмосферу;
- в случае падения самолета, радиоактивный реактор может взорваться, нанеся непоправимый вред всему живому.
Как производят реактивные двигатели для моделей самолетов?
Их производство для моделей самолетов занимает около 6 часов.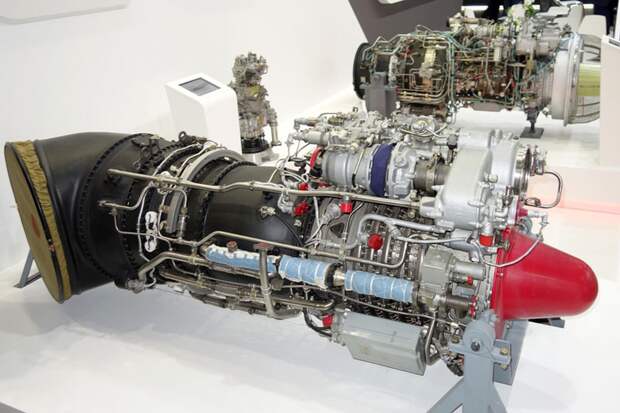 Сначала вытачивается базовая пластина из алюминия, к которой крепятся все остальные детали. По размеру она совпадает с хоккейной шайбой.
Сначала вытачивается базовая пластина из алюминия, к которой крепятся все остальные детали. По размеру она совпадает с хоккейной шайбой.
К ней прикрепляют цилиндр, поэтому получается что-то вроде консервной банки. Это будущий двигатель внутреннего сгорания. Далее устанавливается система подачи топлива. Чтобы его закрепить, в основную пластину вкручиваются шурупы, предварительно опущенные в специальный герметик.
Двигатель для модели самолета.
Каналы стартера крепятся с другой стороны камеры, чтобы перенаправлять выбросы газа в турбинное колесо. В отверстие сбоку от камеры сгорания устанавливается спираль накаливания. Она поджигает топливо внутри двигателя.
Потом ставят турбину и центральную ось цилиндра. На нее ставят колесо компрессора, которое нагнетает воздух в камеру сгорания. Его проверяют с помощью компьютера, прежде чем закрепить пусковую установку.
Готовый двигатель еще раз проверяют на мощность. Его звук немногим отличается от звука двигателя самолета. Он, конечно, меньшей силы, но полностью напоминает его, придавая больше схожести модели.
Он, конечно, меньшей силы, но полностью напоминает его, придавая больше схожести модели.
Похожие публикации
nasamoletah.ru
Турбореактивный двигатель. Элементы конструкции. | АВИАЦИЯ, ПОНЯТНАЯ ВСЕМ.
Турбореактивный двигатель.
В этой статье вернемся к моим любимым двигателям. Я уже ранее говорил о том, что турбореактивный двигатель в современной авиации – основной. И упоминать его в той или иной теме мы еще будем часто. Поэтому пришла пора окончательно определиться с его конструкцией. Конечно же не углубляясь во всевозможные дебри и тонкости :-). Итак авиационный турбореактивный двигатель. Каковы основные части его конструкции, и как они взаимодействуют между собой.
1.Компрессор 2.Камера сгорания 3.Турбина 4. Выходное устройство или реактивное сопло.
Компрессор сжимает воздух до необходимых величин, после чего воздух поступает в камеру сгорания, где подогревается до необходимой температуры за счет сгорания топлива и далее уже получившийся газ поступает на турбину, где отдает часть энергии вращая ее (а она, в свою очередь компрессор), а другая часть при дальнейшем разгоне газа в реактивном сопле превращается в импульс тяги, которая и толкает самолет вперед. Этот процесс достаточно хорошо виден в ролике в статье о двигателе, как тепловой машине.
Этот процесс достаточно хорошо виден в ролике в статье о двигателе, как тепловой машине.
Турбореактивный двигатель с осевым компрессором.
Компрессоры бывают трех видов. Центробежные, осевые и смешанные. Центробежные обычно представляют собой колесо, на поверхности которого выполнены каналы, закручивающиеся от центра к периферии, так называемая крыльчатка.При ее вращении воздух отбрасывется по каналам центробежной силой от центра к периферии, сжимаясь сильно разгоняется и далее попадая в расширяющиеся каналы (диффузор) тормозится и вся его энергия разгона тоже превращается в давление. Это немного похоже на старый аттракцион, который раньше в парках был, когда люди становятся по краю большого горизонтального круга, опираясь спиной на специальные вертикальные спинки, этот круг вращается, наклоняясь в разные стороны и люди не падают, потому что их держит (прижимает) центробежная сила. В компрессоре принцип тот же.
Этот компрессор достаточно прост и надежен, но для создания достаточной степени сжатия нужен большой диаметр крыльчатки, что не могут себе позволить самолеты, особенно небольших размеров. Турбореактивный двигатель просто не влезет в фюзеляж. Поэтому применяется он мало. Но в свое время он был применен на двигателе ВК-1 (РД-45), который устанавливался на знаменитый истребитель МИГ-15, а также на самолеты ИЛ-28 и ТУ-14.
Турбореактивный двигатель просто не влезет в фюзеляж. Поэтому применяется он мало. Но в свое время он был применен на двигателе ВК-1 (РД-45), который устанавливался на знаменитый истребитель МИГ-15, а также на самолеты ИЛ-28 и ТУ-14.
Крылчатка центробежного компрессора на одном валу с турбиной.
Крыльчатки центробежного компрессора.
Двигатель ВК-1. В разрезе хорошо видна крыльчатка центробежного компрессора и далее две жаровые трубы камеры сгорания.
В основном сейчас используется осевой компрессор. В нем на одной вращающейся оси (ротор) укреплены металлические диски (их называют рабочее колесо), по венцам которых размещены так называемые «рабочие лопатки». А между венцами вращающихся рабочих лопаток размещены венцы неподвижных лопаток ( они бычно крепятся на наружном корпусе), это так называемый направляющий аппарат (статор). Все эти лопатки имеют определенный профиль и несколько закручены, работа их в определенном смысле похожа на работу все того же крыла или лопасти вертолета, но только в обратном направлении. Теперь уже не воздух действует на лопатку, а лопатка на него. То есть компрессор совершает механическую работу (над воздухом :-)). Или еще более нагляднее :-). Все знают вентиляторы, которые так приятно обдувают в жару. Вот вам пожалуйста, вентилятор и есть рабочее колесо осевого компрессора, только лопастей конечно не три, как в вентиляторе, а побольше.
Теперь уже не воздух действует на лопатку, а лопатка на него. То есть компрессор совершает механическую работу (над воздухом :-)). Или еще более нагляднее :-). Все знают вентиляторы, которые так приятно обдувают в жару. Вот вам пожалуйста, вентилятор и есть рабочее колесо осевого компрессора, только лопастей конечно не три, как в вентиляторе, а побольше.
Примерно так работает осевой компрессор.
Конечно очень упрощенно, но принципиально именно так. Рабочие лопатки «захватывают» наружный воздух, отбрасывают его внутрь двигателя, там лопатки направляющего аппарата определенным образом направляют его на следующий ряд рабочих лопаток и так далее. Ряд рабочих лопаток вместе с рядом следующих за ними лопаток направляющего аппарата образуют ступень. На каждой ступени происходит сжатие на определенную величину. Осевые компрессоры бывают с разным количеством ступеней. Их может быть пять, а может быть и 14. Соответственно и степень сжатия может быть разная, от 3 до 30 единиц и даже больше.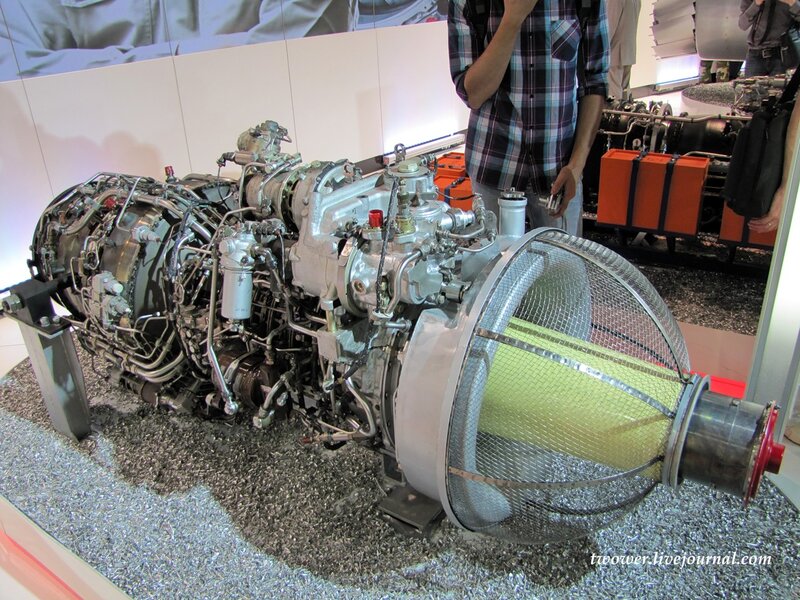 Все зависит от типа и назначения двигателя (и самолета соответственно).
Все зависит от типа и назначения двигателя (и самолета соответственно).
Осевой компрессор достаточно эффективен. Но и очень сложен как теоретически, так и конструктивно. И еще у него есть существенный недостаток: его сравнительно легко повредить. Все посторонние предметы с бетонки и птиц вокруг аэродрома он как говорится принимает на себя и не всегда это обходится без последствий.
Камера сгорания. Она опоясывает ротор двигателя после компрессора сплошным кольцом, либо в виде отдельных труб (они называются жаровые трубы). Для организации процесса горения в комплексе с воздушным охлаждением она вся «дырчатая». Отверстий много, они разного диаметра и формы. В жаровые трубы подается через специальные форсунки топливо (авиационный керосин), где и сгорает, попадая в область высоких температур.
Турбореактивный двигатель (разрез). Хорошо видны 8-ми ступенчатый осевой компрессор, кольцевая камера сгорания, 2-ухступенчатая турбина и выходное устройство.
Далее горячий газ попадает на турбину.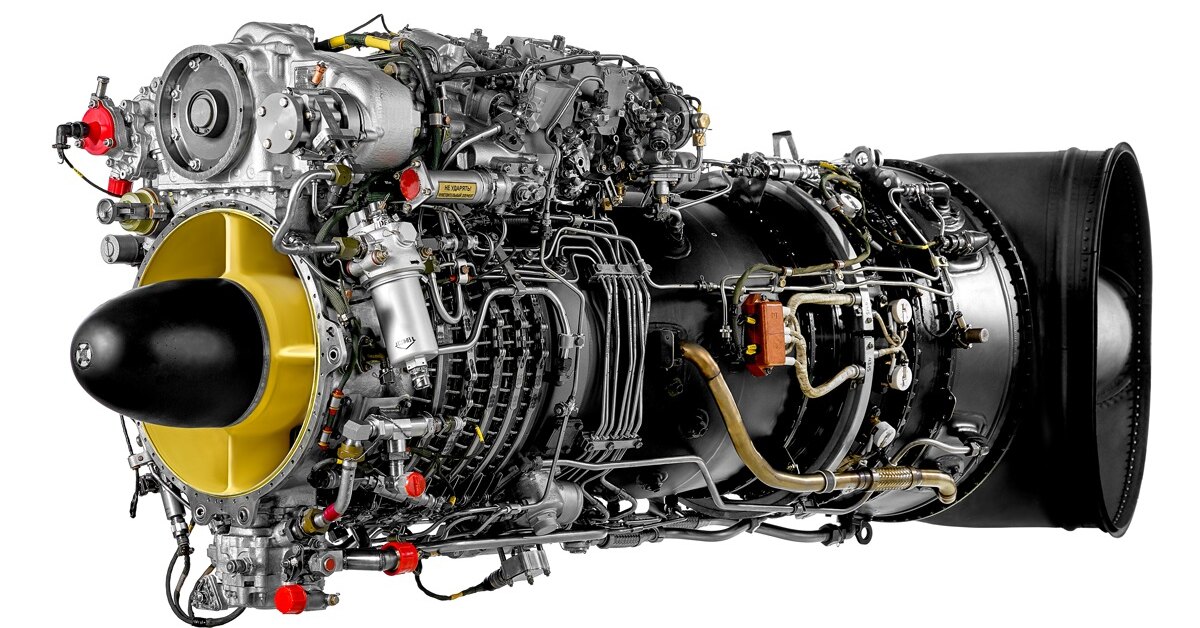 Она похожа на компрессор, но работает, так сказать, в противоположном направлении. ЕЕ раскручивает горячий газ по тому же принципу, как воздух детскую игрушку- пропеллер. Неподвижные лопатки в ней находятся не за вращающимися рабочими, а перед ними и называются сопловым аппаратом. Ступеней у турбины немного, обычно от одной до трех-четырех. Больше и не надо, ведь для привода компрессора хватит, а остальная энергия газа потратится в сопле на разгон и получение тяги. Условия работы турбины мягко говоря «ужасные». Это самый нагруженный узел в двигателе. Турбореактивный двигатель имеет очень большую частоту вращения (до 30000 об/мин). Представляете какая центробежная сила действует на лопатки и диски! Да плюс факел из камеры сгорания с температурой от 1100 до 1500 градусов Цельсия. Вобщем ад :-). Иначе не скажешь. Я был свидетелем, когда при взлете самолета Су-24МР оборвалась рабочая лопатка турбины одного из двигателей. История поучительная, обязательно о ней расскажу в дальнейшем. В современных турбинах применяются достаточно сложные системы охлаждения, а сами они (особенно рабочие лопатки) изготавливаются из особых жаропрочных и жаростойких сталей.
Она похожа на компрессор, но работает, так сказать, в противоположном направлении. ЕЕ раскручивает горячий газ по тому же принципу, как воздух детскую игрушку- пропеллер. Неподвижные лопатки в ней находятся не за вращающимися рабочими, а перед ними и называются сопловым аппаратом. Ступеней у турбины немного, обычно от одной до трех-четырех. Больше и не надо, ведь для привода компрессора хватит, а остальная энергия газа потратится в сопле на разгон и получение тяги. Условия работы турбины мягко говоря «ужасные». Это самый нагруженный узел в двигателе. Турбореактивный двигатель имеет очень большую частоту вращения (до 30000 об/мин). Представляете какая центробежная сила действует на лопатки и диски! Да плюс факел из камеры сгорания с температурой от 1100 до 1500 градусов Цельсия. Вобщем ад :-). Иначе не скажешь. Я был свидетелем, когда при взлете самолета Су-24МР оборвалась рабочая лопатка турбины одного из двигателей. История поучительная, обязательно о ней расскажу в дальнейшем. В современных турбинах применяются достаточно сложные системы охлаждения, а сами они (особенно рабочие лопатки) изготавливаются из особых жаропрочных и жаростойких сталей. Эти стали достаточно дороги, да и весь турбореактивный двигатель в плане материалов очень недешев. В 90-е годы, в эпоху всеобщего разрушения на этом нажились многие нечистые на руку люди, в том числе и военные. Об этом тоже как-нибудь позже…
Эти стали достаточно дороги, да и весь турбореактивный двигатель в плане материалов очень недешев. В 90-е годы, в эпоху всеобщего разрушения на этом нажились многие нечистые на руку люди, в том числе и военные. Об этом тоже как-нибудь позже…
После турбины – реактивное сопло. В нем, собственно, и возникает тяга турбореактивного двигателя. Сопла бывают просто сужающиеся, а бывают сужающе-расширяющиеся. Кроме того бывают неуправляемые (такое сопло на рисунке), а бывают управляемые, когда их диаметр меняется в зависимости от режима работы. Более того сейчас уже есть сопла, которые меняют направление вектора тяги, то есть попросту поворачиваются в разные стороны.
Турбореактивный двигатель – очень сложная система. Летчик управляет им из кабины всего лишь одним рычагом – ручкой управления двигателем (РУД). Но на самом деле этим он лишь задает нужный ему режим. А все остальное берет на себя автоматика двигателя. Это тоже большой и сложный комплекс и еще скажу очень хитроумный. Когда еще будучи курсантом изучал автоматику, всегда удивлялся, как конструкторы и инженеры все это понапридумывали:-), а рабочие-мастера изготовили.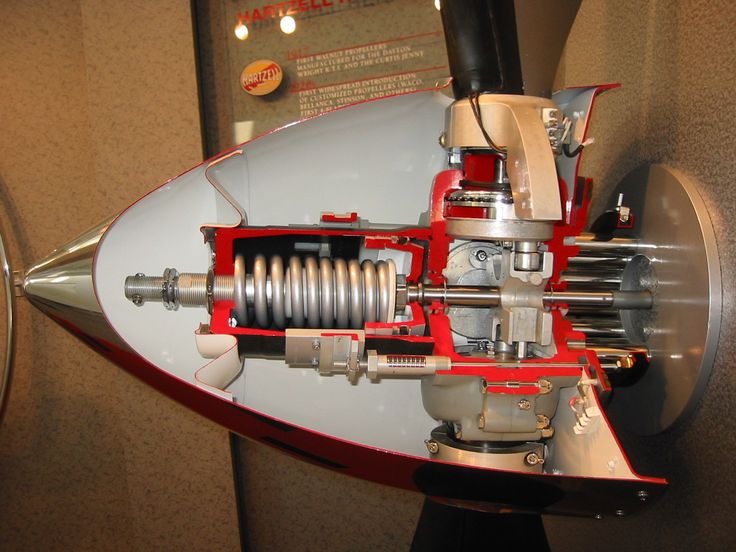 Сложно… Но зато интересно ???? …
Сложно… Но зато интересно ???? …
Вот и все пока. Вкратце опять не получилось :-). Но я все же надеюсь, что вам было интересно. До следующей встречи.
P.S. А вот вам напоследок атракцион, о котором я выше писал. Я на нем в детстве-то не катался, а сейчас их просто нет у нас. Так что знаю только в теории :-).
Вот такой он был, может и сейчас где-то работает…
- Турбореактивный двигатель, как тепловая машина. Принцип работы. Просто.
- Элементы конструкции самолета.
avia-simply.ru
Турбореактивные двигатели (ТРД) — наиболее распространенный тип ГТД, широко применяемый для самолетов гражданской авиации.
Рассмотрим работу ТРД на схеме, приведенной на рис. 7. Во входное устройство 1 попадает атмосферный воздух, сжимается от действия скоростного напора и затем проходят к компрессору 2. Здесь воздух еще более сжимается. При этом повышаются его давление и плотность. Степень повышения давления в современных ТРД может достигать 15— 20 и более.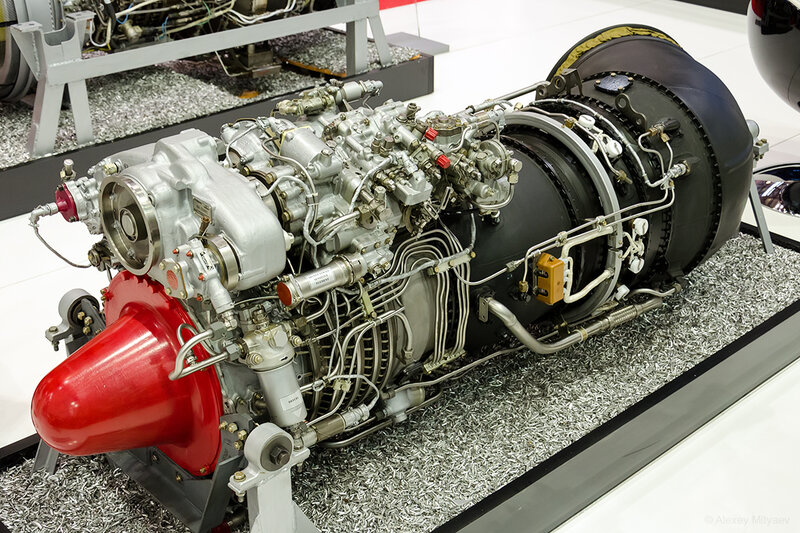 Естественно, что при повышении давления возрастает температура воздуха в компрессоре до 600 — 700 К. Часть горячего воздуха из компрессора может быть взята на обогрев гермокабин, в антиобледенительную систему и т. п.
Естественно, что при повышении давления возрастает температура воздуха в компрессоре до 600 — 700 К. Часть горячего воздуха из компрессора может быть взята на обогрев гермокабин, в антиобледенительную систему и т. п.
Рис.3. Схемы турбореактивного двигателя
Компрессор является одним из основных узлов ГТД и служит для повышения давления воздуха перед поступлением его в камеру сгорания. Для устойчивой и равномерной работы двигателя компрессор должен обеспечить стабильное состояние сжимаемого воздуха у входа в камеру сгорания. Заметим, что при движении вдоль канала компрессора воздух все более сжимается и соответственно растет плотность. Вот почему для сохранения осевой скорости движения потока поперечное сечение канала компрессора сужают. Это еще одна иллюстрация действия закона неразрывности движения. На рис. 7, а показана схема ТРД с осевым компрессором, в котором сжатие происходит в направлении оси двигателя. Эта схема наиболее широко применяется. На рис. 7, б дана схема ТРД с центробежным компрессором, где сжатие воздуха происходит за счет действия центробежных сил от вращающейся крыльчатки 2.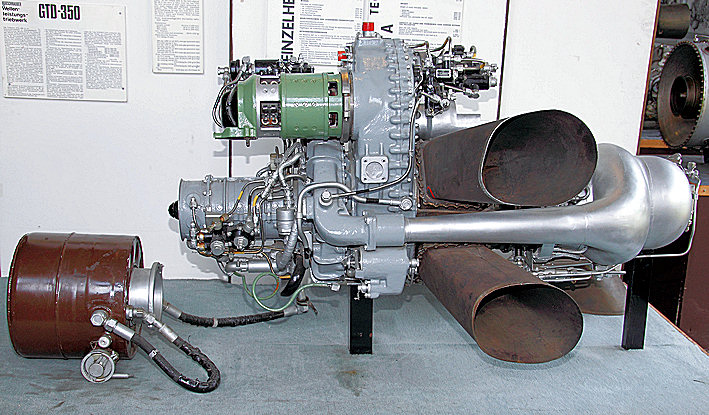 Эта схема редко применяется, так как имеет большие габаритные размеры.
Эта схема редко применяется, так как имеет большие габаритные размеры.
Из компрессора сжатый воздух поступает в камеру сгорания 3, куда через форсунку впрыскивают топливо. При этом образуется горючая смесь. В момент запуска смесь поджигают с помощью пусковой свечи, а затем горение поддерживается непрерывно в процессе всей работы двигателя.
Газообразные продукты сгорания с большой скоростью направляются в выходное устройство 5. На их пути помещается газовая турбина 4. Она служит для привода компрессора и других агрегатов двигателя. Вытекая с большой скоростью из выходного устройства (реактивного сопла), газообразная масса продуктов сгорания тем самым создает большое количество движения, обеспечивающее возникновение реактивной тяги Р.
Турбореактивные двух контурные двигатели (ТРДД) — широко применяемый тип ГГД. Основные преимущества ТРДД — лучшая экономичность, более низкий уровень шума (по сравнению с ТРД). Это и определило широкое распространение ТРДД в гражданской авиации.
Рассмотрим принцип работы ТРДД (рис. 8). Во входное устройство 1 поступает воздух. В отличие от ТРД в ТРДД имеются два компрессора. Первоначально воздух поступает к компрессору 2 низкого давления (КНД).
Рис.4. Схема турбореактивного двух контурного двигателя
Предварительно сжатый поток воздуха разделяется на два. Один поток проходит по наружному контуру и попадает в свое выходное устройство 6, увеличивая массу выходящих газов. Второй поток воздуха поступает в компрессор 3 высокого давления (КВД). Здесь все происходит так же, как и в ТРД: из камеры сгорания 4 газообразные продукты поступают к турбине 5, приводят ее во вращение и вытекают из выходного устройства 7. Турбина приводят во вращение оба компрессора. Причем КНД требует меньшей частоты вращения, меньшей мощности. Ему соответствует своя турбина. Для КВД приводом является другая турбина.
Таким образом, в создании реактивной тяги Р принимают участие два контура: наружный и внутренний. Наружный контур состоит из входного устройства, КНД, кольцевого канала 6 с выходным устройством. В некоторых конструкциях ТРДД предусмотрено смещение на выходе потоков обоих контуров. Внутренний контур работает по обычной схеме ТРД. Для ТРДД введена характеристика, именуемая степенью двухконтурности. Она определяется, как отношение расхода воздуха через наружный контур к расходу воздуха через внутренний контур. Это соотношение для современных ТРДД колеблется в довольно широких пределах: от 0,5 до 8 и выше.
В некоторых конструкциях ТРДД предусмотрено смещение на выходе потоков обоих контуров. Внутренний контур работает по обычной схеме ТРД. Для ТРДД введена характеристика, именуемая степенью двухконтурности. Она определяется, как отношение расхода воздуха через наружный контур к расходу воздуха через внутренний контур. Это соотношение для современных ТРДД колеблется в довольно широких пределах: от 0,5 до 8 и выше.
Очевидно, что параметры воздушного потока наружного и внутреннего контуров и потока горячих газов внутреннего контура резко разнятся. Так, почти на всем пути температура в наружном контуре составляет около 400 К, давление поднимается только до 3 МПа. Во внутреннем контуре в жаровой трубе температура достигает 1400 К и более, а давление возрастает до 15 МПа и более. Эта особенность также является преимуществом ТРДД, поскольку относительно холодный наружный контур в эксплуатации всегда удобней, чем горячий.
Турбовинтовые двигатели (ТВД) — это такой ГТД, в котором турбина развивает мощность, достаточную для привода компрессора и вращения воздушного винта.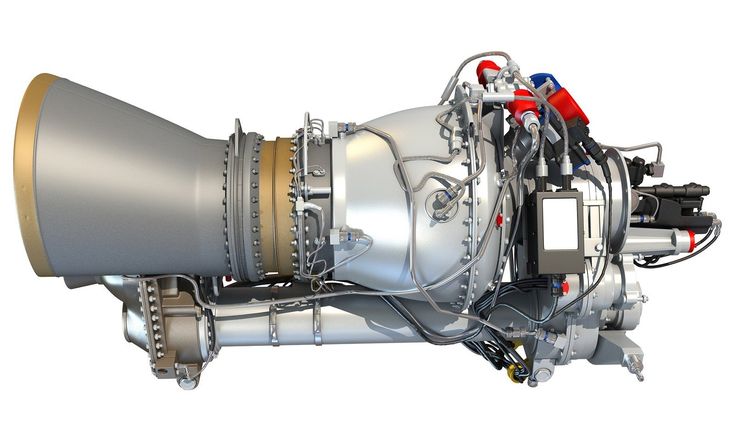 ТВД на дозвуковых скоростях превосходят по экономичности другие типы двигателей. На взлете ТВД развивает в 2—2,5 раза большую тягу, чем ТРД. Следовательно, взлетная дистанция в этом случае будет короче. На самолетах с ТВД воздушный винт может быть использован в качестве тормоза при посадке, что снижает длину пробега. Кроме того, уровень шума ТВД ниже, чем у ТРД и ТРДД. Это обусловило широкое применение ТВД в гражданской авиации. В период дефицита углеводородного топлива ТВД с высокими экономическими показателями становятся все более популярными. Уже сейчас проектируется применение ТВД на самолетах новых поколений.
ТВД на дозвуковых скоростях превосходят по экономичности другие типы двигателей. На взлете ТВД развивает в 2—2,5 раза большую тягу, чем ТРД. Следовательно, взлетная дистанция в этом случае будет короче. На самолетах с ТВД воздушный винт может быть использован в качестве тормоза при посадке, что снижает длину пробега. Кроме того, уровень шума ТВД ниже, чем у ТРД и ТРДД. Это обусловило широкое применение ТВД в гражданской авиации. В период дефицита углеводородного топлива ТВД с высокими экономическими показателями становятся все более популярными. Уже сейчас проектируется применение ТВД на самолетах новых поколений.
К недостаткам ТВД следует отнести тот факт, что воздушные винты могут эффективно применяться только до чисел М, равных 0,7—0,8. Так что ТВД для около- и сверхзвуковых полетов не применимы. В эксплуатации ТВД сложнее, чем ТРД, поскольку наличие редуктора и воздушного винта с регулирующими устройствами требует дополнительных затрат на их эксплуатацию.
Рассмотрим схему работы ТВД (рис. 9) . Воздух попадает во входное устройство двигателя, минуя воздушный винт 1. Затем он сжимается в компрессоре 3. Продукты сгорания вытекают из камеры сгорания 4, заставляют вращаться турбину 5 и выходят из реактивного сопла 6, создавая дополнительную тягу. В конструкциях некоторых ТВД компрессор приводится во вращение одной турбиной, а воздушный винт — другой. Такие независимые приводы дают возможность лучше регулировать работу двигателя. Непременным конструктивным элементом ТВД является редуктор. Дело в том, что турбина вращается с частотой около 20000 об/мин. Прямая передача этого вращения на воздушный винт невозможна, ибо при такой частоте вращения винт не может быть эффективным. Поэтому вращение воздушному винту передается через редуктор 2.
9) . Воздух попадает во входное устройство двигателя, минуя воздушный винт 1. Затем он сжимается в компрессоре 3. Продукты сгорания вытекают из камеры сгорания 4, заставляют вращаться турбину 5 и выходят из реактивного сопла 6, создавая дополнительную тягу. В конструкциях некоторых ТВД компрессор приводится во вращение одной турбиной, а воздушный винт — другой. Такие независимые приводы дают возможность лучше регулировать работу двигателя. Непременным конструктивным элементом ТВД является редуктор. Дело в том, что турбина вращается с частотой около 20000 об/мин. Прямая передача этого вращения на воздушный винт невозможна, ибо при такой частоте вращения винт не может быть эффективным. Поэтому вращение воздушному винту передается через редуктор 2.
Рис. 5. Схема турбовинтового двигателя
Из сказанного следует, что тяга ТВД создается воздушным винтом (около 90 %) и реактивным действием газовой струи (около 10 %). Такое комплексное использование энергии сгорания топливно-воздушной смеси позволяет получить высокий коэффициент полезного действия и хорошие экономические показатели ТВД.
Приведенная выше классификация в известной мере условна. Все большее развитие получают комбинированные двигатели. Схематично один из комбинированных двигателей можно представить таким: обычный поршневой двигатель, отработавшие газы которого вращают газовую турбину; на одном валу с турбиной установлен компрессор, который подает воздух под давлением в камеры сгорания двигателя
studfiles.net
Устройство реактивного двигателя | Двигатель прогресса
Реактивный двигатель был изобретен Гансом фон Охайном (Dr. Hans von Ohain), выдающимся немецким инженером-конструкторм и Фрэнком Уиттлом (Sir Frank Whittle). Первый патент на работающий газотурбинный двигатель, был получен в 1930 году Фрэнк Уиттлом. Однако первую рабочую модель собрал именно Охайн.
2 августа 1939 года в небо поднялся первый реактивный самолет – He 178 (Хейнкель 178), снаряженный двигателем HeS 3, разработанный Охайном.
Устройство реактивного двигателя достаточно просто и одновременно крайне сложно. Просто по принципу действия: забортный воздух (в ракетных двигателях – жидкий кислород) засасывается в турбину, там смешивается с топливом и сгорая, в конце турбины образует т.н. “рабочее тело” (реактивная струя), которое и двигает машину.
Просто по принципу действия: забортный воздух (в ракетных двигателях – жидкий кислород) засасывается в турбину, там смешивается с топливом и сгорая, в конце турбины образует т.н. “рабочее тело” (реактивная струя), которое и двигает машину.
Так все просто, но на деле – это целая область науки, ибо в таких двигателях рабочая температура достигает тысяч градусов по Цельсию. Одна из самых главных проблем турбореактивного двигателестроения – создание не плавящихся деталей, из плавящихся металлов. Но для того, что бы понять проблемы конструкторов и изобретателей нужно сначала более детально изучить принципиальное устройство двигателя.
основные детали реактивного двигателя
В начале турбины всегда стоит вентилятор, который засасывает воздух из внешней среды в турбины. Вентилятор обладает большой площадью и огромным количеством лопастей специальной формы, сделанных из титана. Основных задач две – первичный забор воздуха и охлаждение всего двигателя в целом, путем прокачивание воздуха между внешней оболочкой двигателя и внутренними деталями.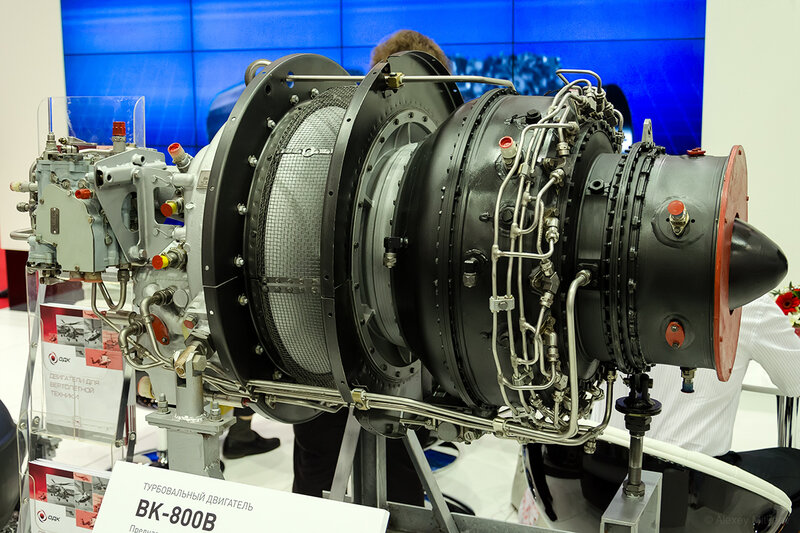 Это охлаждает камеры смешивания и сгорания и не дает им разрушится.
Это охлаждает камеры смешивания и сгорания и не дает им разрушится.
Сразу за вентилятором стоит мощный компрессор, который нагнетает воздух под большим давлением в камеру сгорания.
Камера сгорания выполняет еще и роль карбюратора, смешивая топливо с воздухом. После образования топливо воздушной смеси она поджигается. В процессе возгорания происходит значительный разогрев смеси и окружающих деталей, а также объемное расширение. Фактически реактивный двигатель использует для движения управляемый взрыв.
Камера сгорания реактивного двигателя одна из самых горячих его частей – её необходимо постоянно интенсивное охлаждение. Но и этого недостаточно. Температура в ней достигает 2700 градусов, поэтому её часто делают из керамики.
После камеры сгорания горящая топливо-воздушная смесь направляется непосредственно в турбину.
Турбина состоит из сотен лопаток, на которые давит реактивный поток, приводя турбину во вращение. Турбина в свою очередь вращает вал, на котором “сидят” вентиллятор и компрессор. Таким образом система замыкается и требует лишь подвода топлива и воздуха для своего функционироваия.
Таким образом система замыкается и требует лишь подвода топлива и воздуха для своего функционироваия.
После турбины поток направляется в сопло. Сопло реактивного двигателя – последняя, но далеко не по значению часть реактивного двигателя. Оно формирует непосредственно реактивную струю. В сопло направляется холодный воздух, нагнетаемый вентиллятором для охлаждения внутренних деталей двигателя. Этот поток ограничивает манжету сопла от сверхгорячего реактивного потока и ее дает ей расплавится.
Сопла у реактивных двигателей бывают самые разные. Самым передовым считает подвижное сопло, стоящее на двигателях с отклоняемым вектором тяги. Оно может сжиматься и расширятся, а также отклонятся на значительные углы, регулируя и направляя непосредственно реактивный поток. Это делает самолеты с двигателями с отклоняемым вектором тяги очень маневренными, т.к. маневрирование происходит не только благодаря механизмам крыла, но и непосредственно двигателем.
Существует несколько основных типом реактивных двигателей.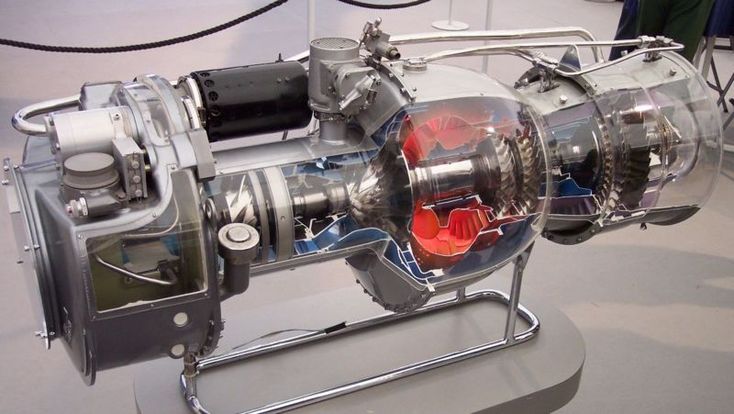
Классический реактивный двигатель самолета F-15
Классический реактивный двигатель – принципиальное устройство которого мы описыали выше. Используется в основном на истребителях в различных модификациях.
Двухлопастной турбовинтовой двигатель
Турбовинтовой двигатель. В этом типе двигателя мощность турбины через понижающий редуктор направляется на вращение классического винта. Такие двигатели позволят большим самолетам летать на приемлемых скоростях и тратить меньше горючего. Нормальной крейсерской скоростью турбовинтового самолета считается 600—800 км/ч.
Турбовентиляторный реактивный двигатель.
Турбовентиляторный реактивный двигатель.
Этот тип двигателя является более экономичным родственником классического типа. главное отличие в том, что на входе ставится вентилятор большего диаметра, который подает воздух не только в турбину, но и создает достаточно мощный поток вне её. Таким образом достигается повышенная экономичность, за счет улучшения КПД.
Используется на лайнерах и больших самолетах.
Прямоточный воздушно-реактивный двигатель (Ramjet)
Прямоточный воздушно-реактивный двигатель
Работает без подвижных деталей. Воздух нагнетается в камеру сгорания естественным способом, за счет торможения потока об обтекатель входного отверстия.
Далее все происходит так же как в обычном реактивном двигателе – воздух смешивается с горючим и выходит в виде реактивной струи из сопла.
Использовался на поездах, самолетах, БЛА, и в боевых ракетах, а также на велосипедах и скутерах.
И напоследок – видео работы реактивного двигателя:
Картинки взяты из различных источников. Русификация картинок – Лаборатори 37.
lab-37.com
Авиационные газотурбинные двигатели.
На сегодняшний день, авиация практически на 100% состоит из машин, которые используют газотурбинный тип силовой установки. Иначе говоря – газотурбинные двигатели. Однако, несмотря на всю возрастающую популярность авиаперелетов сейчас, мало кто знает каким образом работает тот жужжащий и свистящий контейнер, который висит под крылом того или иного авиалайнера.
Принцип работы газотурбинного двигателя.
Газотурбинный двигатель, как и поршневой двигатель на любом автомобиле, относится к двигателям внутреннего сгорания. Они оба преобразуют химическую энергию топлива в тепловую, путем сжигания, а после — в полезную, механическую. Однако то, как это происходит, несколько отличается. В обоих двигателях происходит 4 основных процесса – это: забор, сжатие, расширение, выхлоп.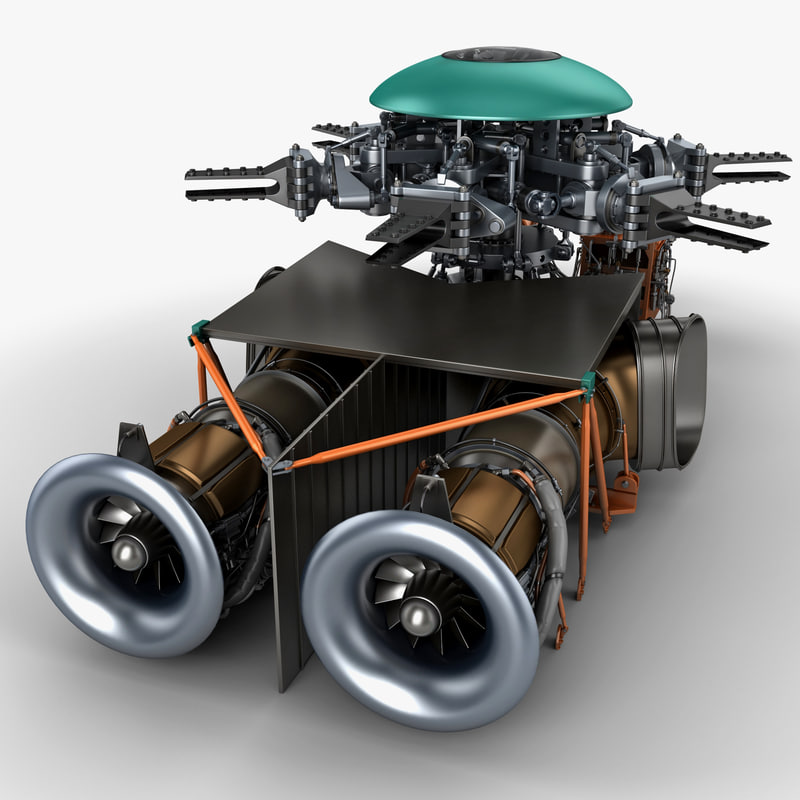 Т.е. в любом случае в двигатель сначала входит воздух (с атмосферы) и топливо (из баков), далее воздух сжимается и в него впрыскивается топливо, после чего смесь воспламеняется, из-за чего значительно расширяется, и в итоге выбрасывается в атмосферу. Из всех этих действий выдает энергию лишь расширение, все остальные необходимы для обеспечения этого действия.
Т.е. в любом случае в двигатель сначала входит воздух (с атмосферы) и топливо (из баков), далее воздух сжимается и в него впрыскивается топливо, после чего смесь воспламеняется, из-за чего значительно расширяется, и в итоге выбрасывается в атмосферу. Из всех этих действий выдает энергию лишь расширение, все остальные необходимы для обеспечения этого действия.
А теперь в чем разница. В газотурбинных двигателях все эти процессы происходят постоянно и одновременно, но в разных частях двигателя, а в поршневом – в одном месте, но в разный момент времени и по очереди. К тому же, чем более сжат воздух, тем большую энергию можно получить при сгорании, а на сегодняшний день степень сжатия газотурбинных двигателей уже достигла 35-40:1, т.е. в процессе прохода через двигатель воздух уменьшается в объеме, а соответственно увеличивает свое давление в 35-40 раз. Для сравнения в поршневых двигателях этот показатель не превышает 8-9:1, в самых современных и совершенных образцах. Соответственно имея равный вес и размеры газотурбинный двигатель гораздо более мощный, да и коэффициент полезного действия у него выше.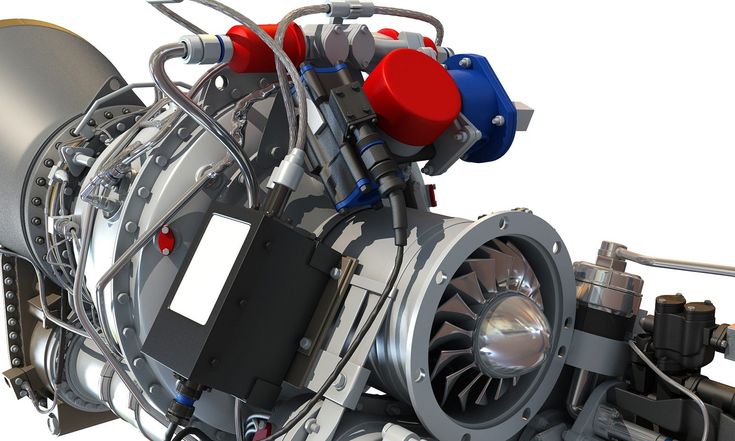 Именно этим и обусловлено такое широкое применения газотурбинных двигателей в авиации в наши дни.
Именно этим и обусловлено такое широкое применения газотурбинных двигателей в авиации в наши дни.
А теперь подробней о конструкции. Четыре вышеперечисленных процесса происходят в двигателе, который изображен на упрощенной схеме под номерами:
Таким образом получается замкнутый цикл. Воздух входит в двигатель, сжимается, смешивается с горючим, воспламеняется, направляется на лопатки турбины, которые снимают до 80% мощности газов для вращения компрессора, все что осталось и обуславливает итоговую мощность двигателя, которая может быть использована разными способами.
В зависимости от способа дальнейшего использования этой энергии газотурбинные двигатели подразделяются на:
Двигатель, изображенный на схеме выше, является турбореактивным. Можно сказать «чистым» газотурбинным, ведь газы после прохождения турбины, которая вращает компрессор, выходят из двигателя через выхлопное сопло на огромной скорости и таким образом толкают самолет вперед. Такие двигатели сейчас используются в основном на высокоскоростных боевых самолетах.
Турбовинтовые двигатели отличаются от турбореактивных тем, что имеют дополнительную секцию турбины, которая еще называется турбиной низкого давления, состоящую из одного или нескольких рядов лопаток, которые отбирают оставшуюся после турбины компрессора энергию у газов и таким образом вращает воздушный винт, который может находится как спереди так и сзади двигателя. После второй секции турбины, отработанные газы выходят фактически уже самотеком, не имея практически никакой энергии, поэтому для их вывода используются просто выхлопные трубы. Подобные двигатели используются на низкоскоростных, маловысотных самолетах.
Турбовентиляторные двигатели имеют схожую схему с турбовинтовыми, только вторая секция турбины отбирает не всю энергию у выходящих газов, поэтому такие двигатели также имеют выхлопное сопло. Но основное отличие состоит в том, что турбина низкого давления приводит в действия вентилятор, который закрыт в кожух. Потому такой двигатель еще называется двуконтурным, ведь воздух проходит через внутренний контур (сам двигатель) и внешний, который необходим лишь для направления воздушной струи, которая толкает двигатель вперед. Потому они и имеют довольно «пухлую» форму. Именно такие двигатели применяются на большинстве современных авиалайнеров, поскольку являются наиболее экономичными на скоростях, приближающихся к скорости звука и эффективными при полетах на высотах выше 7000-8000м и вплоть до 12000-13000м.
Потому они и имеют довольно «пухлую» форму. Именно такие двигатели применяются на большинстве современных авиалайнеров, поскольку являются наиболее экономичными на скоростях, приближающихся к скорости звука и эффективными при полетах на высотах выше 7000-8000м и вплоть до 12000-13000м.
Турбовальные двигатели практически идентичны по конструкции с турбовинтовыми, за исключением того, что вал, который соединен с турбиной низкого давления, выходит из двигателя и может приводить в действие абсолютно что угодно. Такие двигатели используются в вертолетах, где два-три двигателя приводят в действие единственный несущий винт и компенсирующий хвостовой пропеллер. Подобные силовые установки сейчас имеют даже танки – Т-80 и американский «Абрамс».
Газотурбинные двигатели имеют классификацию также по другим признакам:
Турбореактивный двигатель с осевым компрессором получил широкое применение. При работающем двигателе идет непрерывный процесс. Воздух проходит через диффузор, притормаживается и попадает в компрессор. Затем он поступает в камеру сгорания. В камеру через форсунки подается также топливо, смесь сжигается, продукты сгорания перемещаются через турбину. Продукты сгорания в лопатках турбины расширяются и приводят ее во вращение. Далее газы из турбины с уменьшенным давлением поступают в реактивное сопло и с огромной скоростью вырываются наружу, создавая тягу. Максимальная температура имеет место и на воде камеры сгорания.
Затем он поступает в камеру сгорания. В камеру через форсунки подается также топливо, смесь сжигается, продукты сгорания перемещаются через турбину. Продукты сгорания в лопатках турбины расширяются и приводят ее во вращение. Далее газы из турбины с уменьшенным давлением поступают в реактивное сопло и с огромной скоростью вырываются наружу, создавая тягу. Максимальная температура имеет место и на воде камеры сгорания.
Компрессор и турбина расположены на одном валу. Для охлаждения продуктов сгорания подается холодный воздух. В современных реактивных двигателях рабочая температура может превышать температуру плавления сплавов рабочих лопаток примерно на 1000 °С. Система охлаждения деталей турбины и выбор жаропрочных и жаростойких деталей двигателя — одни из главных проблем при конструировании реактивных двигателей всех типов, в том числе и турбореактивных.
Особенностью турбореактивных двигателей с центробежным компрессором является конструкция компрессоров. Принцип работы подобных двигателей аналогичен двигателям с осевым компрессором.
Газотурбинный двигатель. Видео.
Полезные статьи по теме.
Ещё узлы и агрегаты
Путешествуя на самолетах , вы задумывались когда-нибудь о том, как работает двигатель реактивного самолета? О реактивной тяге, которая приводит его в действие, знали еще в Античные времена. Применить же ее на практике смогли только в начале прошлого века, в результате гонки вооружений между Англией и Германией.
Принцип работы двигателя реактивного самолета довольно прост, но имеет некоторые нюансы, которые строго соблюдаются при их производстве. Чтобы самолет смог надежно держаться в воздухе, они должны работать идеально. Ведь от этого зависят жизни и безопасность всех, кто находится на борту самолета.
Его приводит в действие реактивная тяга. Для этого нужна какая-то жидкость, выталкиваемая из задней части системы и придающая ей движение вперед. Здесь работает третий закон Ньютона, который гласит: “Любое действие вызывает равное противодействие”.
Здесь работает третий закон Ньютона, который гласит: “Любое действие вызывает равное противодействие”.
У реактивного двигателя вместо жидкости применяется воздух. Он создает силу, обеспечивающую движение.
В нем используются горячие газы и смесь воздуха со сгораемым топливом. Эта смесь выходит из него с высокой скоростью и толкает самолет вперед, давая ему лететь.
Если говорить об устройстве двигателя реактивного самолета, то оно представляет из себя соединение четырех самых важных деталей:
- компрессора;
- камеры горения;
- турбины;
- выхлопа.
Компрессор состоит из нескольких турбин, которые засасывают воздух и сжимают его по мере прохождения через расположенные под углом лопасти. При сжатии температура и давление воздуха повышаются. Часть сжатого воздуха попадает в камеру горения, где смешивается с топливом и поджигается. Это увеличивает тепловую энергию воздуха.
Это увеличивает тепловую энергию воздуха.
Реактивный двигатель.
Горячая смесь на высокой скорости выходит из камеры и расширяется. Там она проходит через еще одну турбину с лопастями, которые вращаются, благодаря энергии газа.
Турбина соединена с компрессором в передней части двигателя, и таким образом приводит его в движение. Горячий воздух выходит через выхлоп. К этому моменту температура смеси очень высока. И еще увеличивается, благодаря эффекту Дросселирования. После этого воздух выходит из него.
Разработка самолетов с реактивным двигателем началась в 30х годах прошлого века. Англичане и немцы начали разрабатывать подобные модели. В этой гонке победили немецкие ученые. Поэтому первым самолетом с реактивным двигателем стала “Ласточка” в Люфтваффе. “Глостерский метеор” поднялся в воздух немного позднее. О первых самолетах с такими двигателями подробно рассказано в этой статье.
Двигатель сверхзвукового самолета — тоже реактивный, но уже в совершенно другой модификации.
Как работает турбореактивный двигатель?
Реактивные двигатели применяются повсеместно, а турбореактивные устанавливаются больших пассажирских лайнерах . Отличие их в том, что первый несет с собой запас топлива и окислителя, а конструкция обеспечивает их подачу из баков.
Турбореактивный двигатель самолета несет с собой лишь топливо, а окислитель — воздух — нагнетается турбиной из атмосферы. В остальном принцип его работы совпадает с тем же, что и у реактивного.
Одна из самых важных деталей у них — это лопасть турбины. От нее зависит мощность двигателя.
Схема турбореактивного двигателя.
Именно они вырабатывают тяговые усилия, необходимые для ускорения самолета. Каждый из лопастей производит в 10 раз больше энергии, чем самый обычный, автомобильный двигатель. Они устанавливаются позади камеры сгорания, в той части двигателя, где самое высокое давление, а температура доходит до 1400 градусов по Цельсию.
В процессе производства лопастей они проходят через процесс монокристаллизации, что придает им твердости и прочности.
Перед тем, как установить на самолет, каждый двигатель проверяется на полное тяговое усилие. Он должен пройти сертификацию Европейского совета по безопасности и компанией, которая его произвела. Одной из самых крупных фирм по их производству является Роллс-Ройс.
Что такое самолет с атомным двигателем?
Во время Холодной войны были предприняты попытки создания реактивного двигателя не на химической реакции, а на тепле, который бы вырабатывал ядерный реактор. Его ставили вместо камеры сгорания.
Воздух проходит через активную зону реактора, понижая его температуру и повышая свою. Он расширяется и истекает из сопла со скоростью, большей чем скорость полета.
Комбинированный турбреактивно-атомный двигатель.
В СССР проводились его испытания на базе ТУ-95. В США тоже не отставали от ученых в Советском Союзе.
В США тоже не отставали от ученых в Советском Союзе.
В 60х годах исследования в обеих сторонах постепенно прекратились. Основными тремя проблемами, которые помешали разработке, стали:
- безопасность летчиков во время полета;
- выброс радиоактивных частиц в атмосферу;
- в случае падения самолета, радиоактивный реактор может взорваться, нанеся непоправимый вред всему живому.
Как производят реактивные двигатели для моделей самолетов?
Их производство для моделей самолетов занимает около 6 часов. Сначала вытачивается базовая пластина из алюминия, к которой крепятся все остальные детали. По размеру она совпадает с хоккейной шайбой.
К ней прикрепляют цилиндр, поэтому получается что-то вроде консервной банки. Это будущий двигатель внутреннего сгорания. Далее устанавливается система подачи топлива . Чтобы его закрепить, в основную пластину вкручиваются шурупы, предварительно опущенные в специальный герметик.
Двигатель для модели самолета.
Каналы стартера крепятся с другой стороны камеры, чтобы перенаправлять выбросы газа в турбинное колесо. В отверстие сбоку от камеры сгорания устанавливается спираль накаливания. Она поджигает топливо внутри двигателя.
Потом ставят турбину и центральную ось цилиндра. На нее ставят колесо компрессора, которое нагнетает воздух в камеру сгорания. Его проверяют с помощью компьютера, прежде чем закрепить пусковую установку.
Готовый двигатель еще раз проверяют на мощность. Его звук немногим отличается от звука двигателя самолета. Он, конечно, меньшей силы, но полностью напоминает его, придавая больше схожести модели.
Регуляторы хода
RC Design / Статьи / Аппаратура Радиоуправления
Автор — Владимир Васильков (Vovic)
- Введение
- Общие понятия и функции
- Защитно-сервисные функции
- Важные характеристики
- Настройка регуляторов хода
- Особенности подключения регуляторов хода
- Многомоторные модели
- Конструктивное исполнение регуляторов хода
- Производители регуляторов хода
- Принцип действия регуляторов хода
- Техническая реализация
- Принцип работы регулятора бесколлекторного электродвигателя
- Регуляторы хода бесколлекторных бессенсорных электродвигателей
- Теоретикам
- Заключение
Введение
На моделях c электроприводом требуется управлять электромоторами — их нужно включать, менять их обороты и останавливать.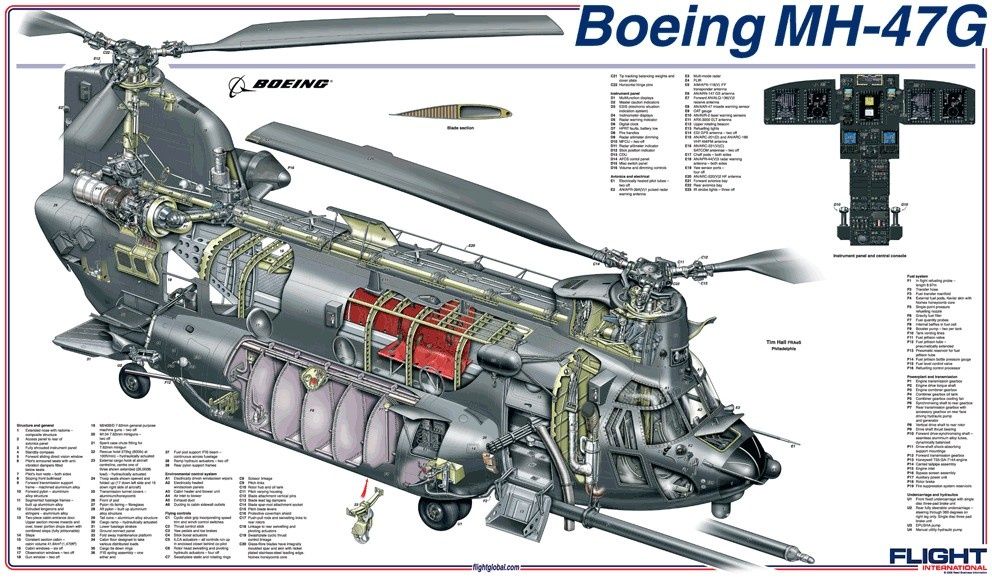 Если на двигателях внутреннего сгорания для этих целей служат управляемый сервомашинкой карбюратор, то электромоторам требуется отдельное устройство, которое называется регулятором хода.
Если на двигателях внутреннего сгорания для этих целей служат управляемый сервомашинкой карбюратор, то электромоторам требуется отдельное устройство, которое называется регулятором хода.
Исторически первыми появились механические регуляторы. Они представляют собой мощный реостат (переменное сопротивление), который включается последовательно с электродвигателем. Специальная рулевая машинка позволяет управлять реостатом, регулируя, таким образом, обороты двигателя. Наряду с простотой, механическим регуляторам присущи такие недостатки, как поглощение драгоценной электроэнергии на борту и превращение ее в тепло. Это тепло еще нужно отвести в окружающую среду, что создает дополнительные проблемы. Особой надежностью эти регуляторы не отличаются, поскольку содержат скользящие контакты, через которые протекает большой ток. Сильный нагрев конструкции также не способствует ее надежности. Сейчас механические регуляторы используются только в простейших игрушках, где мощность силового мотора невелика, а низкая цена очень важна. На серьезные модели такие регуляторы не ставят, и мы о них больше говорить не будем.
На серьезные модели такие регуляторы не ставят, и мы о них больше говорить не будем.
Развитие техники полупроводниковых приборов позволило создать электронные модельные регуляторы хода без двигающихся частей, свободные от указанных выше недостатков. В них энергия поступает на мотор импульсами, и все регулировки происходят путем изменения длительности импульсов.
Помимо электронных регуляторов хода, выпускаются электронные выключатели ходовых электродвигателей. Они не регулируют мощность двигателя, а только включают и выключают его по команде с передатчика. О них мы тоже дальше говорить не будем.
В первой части данной статьи рассказано то, что вам понадобится знать о регуляторах хода. Во второй половине рассказывается о том, как они устроены и функционируют. Как и в статье про сервомашинки, эта часть для любителей не просто гонять модели, а разобраться в сути принципа действия регуляторов хода.
Общие понятия и функции
Обычно, помимо управления оборотами, регуляторы предлагают много дополнительных функций.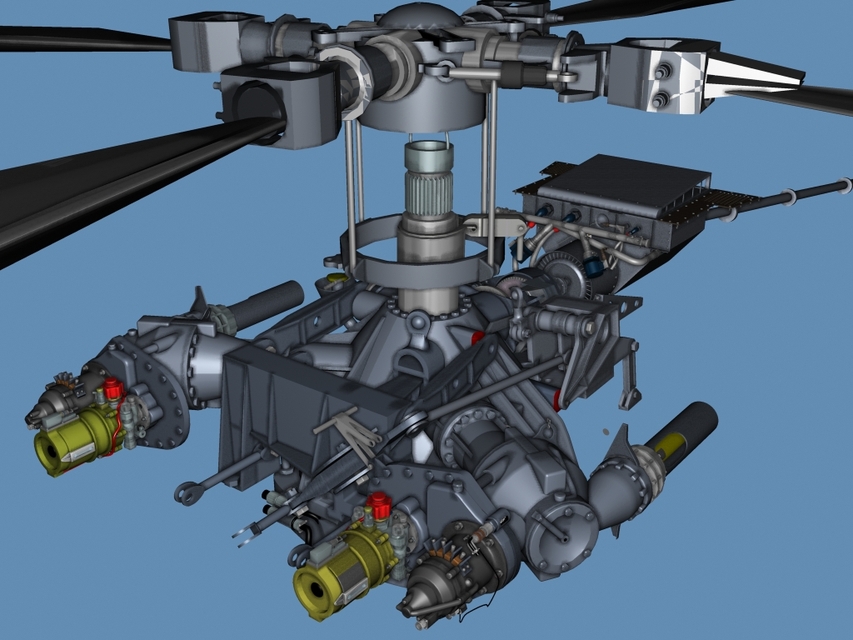 Кроме того, они имеют ряд характеристик, от которых может зависеть выбор вами той или иной модели. Поэтому для начала дадим основные определения с комментариями, чтобы вам было легче ориентироваться.
Кроме того, они имеют ряд характеристик, от которых может зависеть выбор вами той или иной модели. Поэтому для начала дадим основные определения с комментариями, чтобы вам было легче ориентироваться.
Тормоз. Для многих моделей нужно не только быстро раскрутить двигатель на старте, но и быстро его затормозить. Это важно для автомоделей и для электролетов со складывающимся винтом. Торможение осуществляется путем замыкания обмоток двигателя через регулятор. Иногда реализуется функция «мягкого» тормоза, когда обмотки замыкаются не сразу, а небольшими импульсами. Это позволяет уменьшить нагрев регулятора и продлить жизнь коллектора электродвигателя.
Реверс. Иногда бывает полезно иметь на модели задний ход. Поэтому многие регуляторы позволяют менять направление вращения электродвигателя, подавая на него напряжение в обратной полярности. Задний ход зачастую делается не на полную мощность, так как «на всю катушку» он просто не нужен. Зато появляется возможность упростить реализацию силовых ключей заднего хода и уменьшить цену регулятора.
BEC-система (Battery Elimination Cirquit). В большинстве регуляторов для низковольтных моторов (под батареи не более 10-15 банок) встраивают систему вторичного электропитания для приемника и сервомашинок. К управлению двигателем она отношения не имеет, но позволяет не ставить на модель два аккумулятора: один силовой, а другой для системы радиоуправления. Все питание происходит от силовых аккумуляторов, что весьма удобно.
Опторазвязка. В мощных регуляторах на повышенные напряжения — от 15 до 36 банок аккумуляторов встраивают гальваническую развязку силовых цепей от цепей приемника системы радиоуправления. Это делается для того, чтобы мощные импульсные помехи из силовой части регулятора и двигателя не попали на высокочувствительные входные цепи приемника. Естественно, в случае применения опторазвязки приемнику потребуется отдельное питание.
Защитно-сервисные функции
К функциям собственно регулирования добавляют разнообразные полезные вещи:
POR (Power on Reset).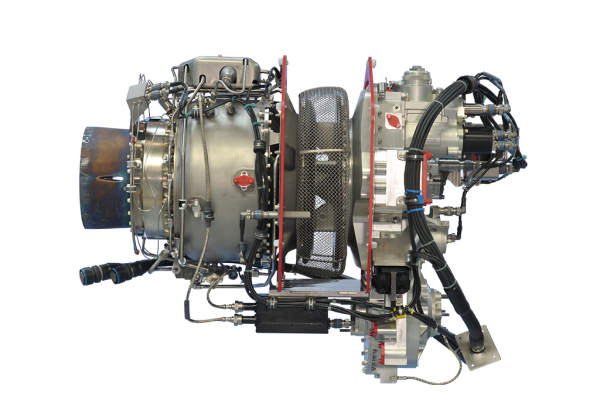 Сброс при включении. При включении бортового питания модели может так случиться (по забывчивости моделиста), что ручка управления двигателем не стоит в положении «Стоп». Тогда двигатель модели может сразу выйти на максимальные обороты. Для не готового к этому моделиста такой внезапный старт может кончиться серьезными травмами и потерей модели. Для предотвращения этого в программу контроллера вводят функцию POR. Она работает так: при подаче питания на регулятор хода он принудительно ставит двигатель в положение «Стоп» вне зависимости от длительности управляющего импульса от приемника. После того, как моделист переведет ручку в положение «Стоп», блокировка снимается, и двигателем можно управлять, как обычно.
Сброс при включении. При включении бортового питания модели может так случиться (по забывчивости моделиста), что ручка управления двигателем не стоит в положении «Стоп». Тогда двигатель модели может сразу выйти на максимальные обороты. Для не готового к этому моделиста такой внезапный старт может кончиться серьезными травмами и потерей модели. Для предотвращения этого в программу контроллера вводят функцию POR. Она работает так: при подаче питания на регулятор хода он принудительно ставит двигатель в положение «Стоп» вне зависимости от длительности управляющего импульса от приемника. После того, как моделист переведет ручку в положение «Стоп», блокировка снимается, и двигателем можно управлять, как обычно.
PCO (Power Cut Off). Функция отключения электродвигателя при падении напряжения аккумулятора ниже заданного порога. Очень полезна для летающих электромоделей с системой ВЕС. В отличие от наземных моделей, просто останавливающихся при отключении двигателя, летающую модель еще надо посадить на землю.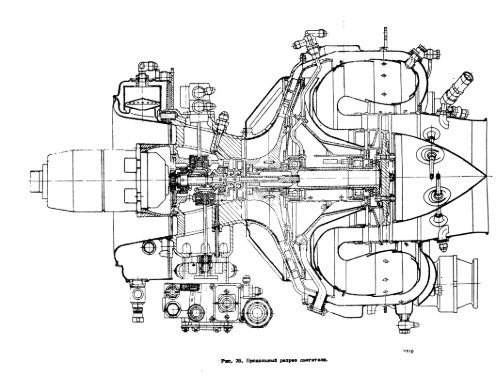 Для этого после отключения ходового двигателя в аккумуляторе остается еще немного энергии для работы приемника и сервомашинок. Порог отключения рассчитан на определенный вид аккумуляторов, чаще никель-кадмиевых. Если подключить литиевые, то они могут испортиться с одной зарядки. Продвинутые регуляторы позволяют настраивать порог отключения под конкретный тип аккумулятора.
Для этого после отключения ходового двигателя в аккумуляторе остается еще немного энергии для работы приемника и сервомашинок. Порог отключения рассчитан на определенный вид аккумуляторов, чаще никель-кадмиевых. Если подключить литиевые, то они могут испортиться с одной зарядки. Продвинутые регуляторы позволяют настраивать порог отключения под конкретный тип аккумулятора.
TOP (Thermal Overload Protection) — защита силовых ключей от токовой перегрузки, которая может привести к тепловому разрушению MOSFET-транзисторов. Защищает также от короткого замыкания в нагрузке. Реализуется путем встраивания в силовые цепи датчика тока и программирования в контроллере функции порогового отключения всех ключей. Сбрасывается коммутацией питания.
TP (Thermal Protection) — защита от перегрева регулятора хода. На плате ставится термодатчик, отключающий регулятор при его нагреве свыше допустимого уровня. Сбрасывается при охлаждении корпуса регулятора.
RVP (Reverse Voltage Protection) — защита от переполюсовки питающего напряжения. Неизбежно усложняет и удорожает регулятор, ухудшая его параметры. Применяется редко. На большинстве хороших регуляторов хода не используется.
Неизбежно усложняет и удорожает регулятор, ухудшая его параметры. Применяется редко. На большинстве хороших регуляторов хода не используется.
Обилие систем защиты в регуляторах может создать ложное представление о том, что регулятор хода нельзя спалить. Это не так. Во-первых, регуляторы редко защищают от переполюсовки силового аккумулятора. В этом случае выгорают, как правило, все силовые ключи. По моим наблюдениям, так сжигается каждый второй регулятор хода. Во-вторых, в некоторых случаях защиту приходится отключать. Например, в электровертолете. Потому что срабатывание защиты в полете сохранит регулятор, но угробит саму модель. В-третьих, защита спасает регулятор, только если он работает с электродвигателем, более-менее согласованным с ним по характеристикам.
Важные характеристики
У регулятора хода есть несколько важных характеристик, от которых зависят его возможности, определяющие, с каким двигателем и аккумулятором он сможет работать вообще.
Максимальный постоянный ток. Определяет, какой максимальный ток двигателя может выдерживать регулятор длительное время.
Определяет, какой максимальный ток двигателя может выдерживать регулятор длительное время.
Параметр простой лишь на первый взгляд. На английском обозначается как Continuous Current. Путаница возникает в разном понимании термина Continuous. Для микроэлектроники это доли секунды. Т.е. это ток, который выдерживают силовые ключи и не срабатывает защита TOP (см. выше). Совсем не означает, что такой ток выдержат провода и печатные проводники в регуляторе. Поэтому, если в характеристиках регулятора написано Continuous Current — 400А, это совсем не значит, что регулятор выдержит такой ток в течение минуты. Реальный продолжительный ток в несколько раз меньше. Многие производители указывают время продолжительности максимального тока.
Максимальный пиковый ток. Это ток, который кратковременно может выдерживать регулятор. Обычно пиковый ток в несколько раз превышает постоянный. Пиковые токи возникают во время старта, когда двигатель должен быстро развить большой вращающий момент. Например, при резком старте автомодели.
Например, при резком старте автомодели.
В настоящее время, чтобы облегчить жизнь потребителей, зачастую применяется альтернативная система обозначения возможностей регуляторов. Подобное можно часто встретить для автомоделей. Там для регуляторов сообщается, на скольки-витковые моторы они рассчитаны. Естественно, для моторов, в свою очередь, указывается количество витков в обмотках. Т.н. безлимитные регуляторы могут работать с любыми автомодельными электродвигателями, но не с любыми двигателями вообще!
Максимальное напряжение батареи. При большем, чем разрешено, напряжении батареи регулятор может сгореть. Часто в характеристиках обозначают не напряжение, а число банок в батарее NiCd аккумуляторов. Умножьте эту величину на 1,2 Вольт и получите максимальное разрешенное напряжение.
Внутреннее сопротивление. Само собой, что схемы коммутации электроэнергии, применяемые в регуляторах, вносят определенные потери энергии, за счет внутреннего сопротивления ключей. Поэтому все регуляторы имеют такую характеристику, как внутреннее сопротивление. Хоть внутреннее сопротивление регулятора и невелико (0,0006 Ом у чемпионатных регуляторов), вносимые потери могут сыграть большую роль, когда дело дойдет до серьезных соревнований.
Поэтому все регуляторы имеют такую характеристику, как внутреннее сопротивление. Хоть внутреннее сопротивление регулятора и невелико (0,0006 Ом у чемпионатных регуляторов), вносимые потери могут сыграть большую роль, когда дело дойдет до серьезных соревнований.
Кстати, у реверсивных регуляторов внутреннее сопротивление обычно больше, чем у аналогичных моделей без реверса. Это происходит из-за особенностей построения схем коммутации электродвигателя. Какой из этого можно сделать практический вывод? Да очень простой. Если вы собираетесь серьезно кататься на автомодели, и потом выступать в соревнованиях, вам лучше сразу учиться на регуляторе без реверса. Хотя поначалу без заднего хода ездить неудобно.
Частота импульсов регулятора. Оптимальная частота регулирования зависит от параметров используемого электродвигателя. Если частота много выше оптимальной, — растут потери на коммутацию ключей в регуляторе. Эти потери связаны с тем, что даже самый быстрый ключ не открывается и не закрывается мгновенно.![]() В то время, когда он переходит из одного состояния в другое, на нем теряется энергия. Если же частота много ниже оптимальной, — растут индуктивные потери в моторе.
В то время, когда он переходит из одного состояния в другое, на нем теряется энергия. Если же частота много ниже оптимальной, — растут индуктивные потери в моторе.
В регуляторах хода бесколлекторных двигателей еще больше вариантов параметров. Поэтому при подборе регулятора к двигателю лучше просто ориентироваться на рекомендации производителя.
Настройка регуляторов хода
Производители регуляторов хода стараются сделать свои изделия совместимыми с широкой номенклатурой двигателей и передатчиков радиоуправления. Поэтому они вводят в них много параметров, настраиваемых пользователем.
В первую очередь, настраиваются положения джойстиков передатчика, соответствующие режимам «нейтраль», «тормоз», «максимальный газ», «реверс». Такие режимы, как «тормоз» и «реверс», могут отключаться. Настройка крайних значений обеспечивает уверенную работу регулятора с передатчиками, у которых могут существенно отличаться значения продолжительности канального импульса в крайних положениях джойстика. В некоторых регуляторах настраивается величина мертвой зоны в положении «нейтраль». Последовательность операций по настройке различная у разных производителей. Здесь надо следовать указаниям инструкции. В качестве команд настройки используются кнопки на корпусе регулятора, либо те или иные положения джойстика. Некоторые регуляторы переходят в режим настройки при подключении или съеме перемычки-джампера, как в компьютере. В качестве индикатора настраиваемых режимов служат светодиоды на корпусе регулятора. В последнее время многие регуляторы используют звуковую индикацию режимов настройки. При этом в качестве пищалки работают обмотки подключенного двигателя.
В некоторых регуляторах настраивается величина мертвой зоны в положении «нейтраль». Последовательность операций по настройке различная у разных производителей. Здесь надо следовать указаниям инструкции. В качестве команд настройки используются кнопки на корпусе регулятора, либо те или иные положения джойстика. Некоторые регуляторы переходят в режим настройки при подключении или съеме перемычки-джампера, как в компьютере. В качестве индикатора настраиваемых режимов служат светодиоды на корпусе регулятора. В последнее время многие регуляторы используют звуковую индикацию режимов настройки. При этом в качестве пищалки работают обмотки подключенного двигателя.
Некоторые регуляторы позволяют изменять частоту импульсного регулирования при работе регулятора с разными двигателями. Причем частота может определяться отдельно для прямого хода и для торможения. В некоторых приложениях могут отключаться при программировании системы защиты, например, в электровертолете.
В продвинутых регуляторах хода бессенсорных двигателей есть возможность изменения сдвига фаз (Timing) трехфазного тока относительно положения ротора. Это связано с особенностью работы бессенсорных регуляторов, у которых режимы наибольшей мощности и наивысшего КПД не совпадают. В этом случае пользователь может выбрать то, что для его модели важнее.
Это связано с особенностью работы бессенсорных регуляторов, у которых режимы наибольшей мощности и наивысшего КПД не совпадают. В этом случае пользователь может выбрать то, что для его модели важнее.
Поскольку мир моделизма разнообразен, выпускаются специализированные регуляторы, скажем, для автомоделей, судомоделей, самолетов и вертолетов. В этих моделях набор реализуемых функций разнообразен. Чтобы не расширять необоснованно номенклатуру регуляторов хода, некоторые производители делают универсальный прибор с перенастройкой под судо- авто- авиамодели.
В большинстве приложений регулятор хода регулирует мощность, подводимую к двигателю, пропорционально положению джойстика на передатчике. Но не везде. В электровертолетах гораздо важнее регулировать не мощность, а обороты двигателя. В этом случае при изменении нагрузки и постепенной разрядке аккумулятора все настройки системы управления сохраняют свою эффективность. В регуляторы хода коллекторных двигателей для обратной связи добавляют датчик Холла и магнитик на роторе вертолета. Регуляторы хода бесколлекторных двигателей имеют информацию об оборотах уже внутри и дополнительных датчиков не требуют. Многофункциональные регуляторы при настройке переводятся в вертолетный режим, после чего они стабилизируют и регулируют не мощность, а обороты двигателя.
Регуляторы хода бесколлекторных двигателей имеют информацию об оборотах уже внутри и дополнительных датчиков не требуют. Многофункциональные регуляторы при настройке переводятся в вертолетный режим, после чего они стабилизируют и регулируют не мощность, а обороты двигателя.
В продвинутых регуляторах может настраиваться очень много параметров. Для примера рассмотрим параметры настройки автомодельных регуляторов хода «Циклон» фирмы Novak на следующем графике:
По оси абсцисс — длина канального импульса при соответствующем положении курка газа. Здесь обозначены следующие точки и соответствующие им параметры:
- Абсцисса точки а — положение курка при 100% торможении
- Длина участка b-c — величина мертвой зоны нейтрали
- Середина участка b-c — положение курка в нейтрали
- Ордината точки d — минимальная величина газа
- Абсцисса точки e — положение курка на 100% газа
Кроме того, для участка а-b задается частота импульсов торможения, для участка d-e частота импульсов прямого хода, для нейтрали задается величина подтормаживания (Drag Brake) и частота его импульсов. Итого — девять параметров. Это совсем не предел. У шульцевского авторегулятора mcc1010 устанавливается пятнадцать параметров. Понятно, что не всякий моделист готов самостоятельно кропотливо оптимизировать все эти параметры под свой мотор и конкретную трассу. Чтобы упростить эту задачу, производители создали несколько комплектов параметров под определенные трассы и моторы. Эти комплекты хранятся в памяти регулятора хода. Моделисту средней руки остается парой нажатий кнопок выбрать подходящий набор параметров. Крутые чемпионы, конечно, настраивают свои болиды, в т.ч. и в части регулятора хода, сами.
Итого — девять параметров. Это совсем не предел. У шульцевского авторегулятора mcc1010 устанавливается пятнадцать параметров. Понятно, что не всякий моделист готов самостоятельно кропотливо оптимизировать все эти параметры под свой мотор и конкретную трассу. Чтобы упростить эту задачу, производители создали несколько комплектов параметров под определенные трассы и моторы. Эти комплекты хранятся в памяти регулятора хода. Моделисту средней руки остается парой нажатий кнопок выбрать подходящий набор параметров. Крутые чемпионы, конечно, настраивают свои болиды, в т.ч. и в части регулятора хода, сами.
Особенности подключения регуляторов хода
Провода. Регулятор хода соединяется проводами с аккумулятором и электродвигателем. Эти провода — важный элемент в силовой установке. Для правильной ее работы необходимо соблюдать некоторые рекомендации. В качестве соединительных проводов используется медный гибкий многожильный провод. Провода не электротехнические, а специальные — с очень большим количеством очень тонких жил. Такие провода, помимо электромоделей, широко используются для подключения акустических систем большой мощности звуковой аппаратуры класса Hi-End, и их можно найти в серьезных магазинах аудиотехники. Наиболее распространены провода сечением 1 кв. мм. для токов до 20 ампер, 1,5 кв. мм. — для токов до 30 ампер, 2,5 кв. мм. — до 50 ампер и 4 кв. мм. — до 80 ампер. Использование меньшего сечения на большие токи чревато как минимум снижением КПД мотоустановки, как максимум — аварией с пожаром. Наоборот — допустимо, но необоснованно завышается вес, — медь-то тяжелая!
Такие провода, помимо электромоделей, широко используются для подключения акустических систем большой мощности звуковой аппаратуры класса Hi-End, и их можно найти в серьезных магазинах аудиотехники. Наиболее распространены провода сечением 1 кв. мм. для токов до 20 ампер, 1,5 кв. мм. — для токов до 30 ампер, 2,5 кв. мм. — до 50 ампер и 4 кв. мм. — до 80 ампер. Использование меньшего сечения на большие токи чревато как минимум снижением КПД мотоустановки, как максимум — аварией с пожаром. Наоборот — допустимо, но необоснованно завышается вес, — медь-то тяжелая!
Здесь даны значения допустимых токов, рекомендуемые для специальных модельных проводов в термостойкой силиконовой изоляции. При нагружении максимальным током они прилично греются. Для проводов в обычной изоляции лучше уменьшить допустимый ток от выше рекомендованных значений раза в полтора.
Длина проводов от регулятора до двигателя делается как можно меньше. Дело в том, что по этим проводам коммутируются большие токи сравнительно высокой частоты. Компоненты их спектра могут попасть в радиоканал аппаратуры управления в виде помех, спровоцировав отказ системы управления.
Компоненты их спектра могут попасть в радиоканал аппаратуры управления в виде помех, спровоцировав отказ системы управления.
Конденсаторы. Для уменьшения широкополосных помех, генерируемых щеточно-коллекторым узлом, используется его шунтирование керамическими или тонкопленочными конденсаторами. Один конденсатор включается между щетками, два других — между каждой щеткой и корпусом двигателя. Емкость конденсатора подбирается компромиссным путем. Дело в том, что конденсаторы большей емкости лучше подавят помехи. Но при увеличении их емкости растут коммутационные потери на ключах регулятора хода. Поэтому из благих пожеланий уменьшить помехи не надо увеличивать емкость блокирующих конденсаторов! Так можно резко снизить КПД, а то и спалить регулятор хода. А вот длину проводов надо минимизировать, потому как, в сущности, это антенны, излучающие помехи. Кстати, при проверке дальности работы аппаратуры радиоуправления, силовой мотор должен работать на 50% газа. Уровень помех при этом максимальный.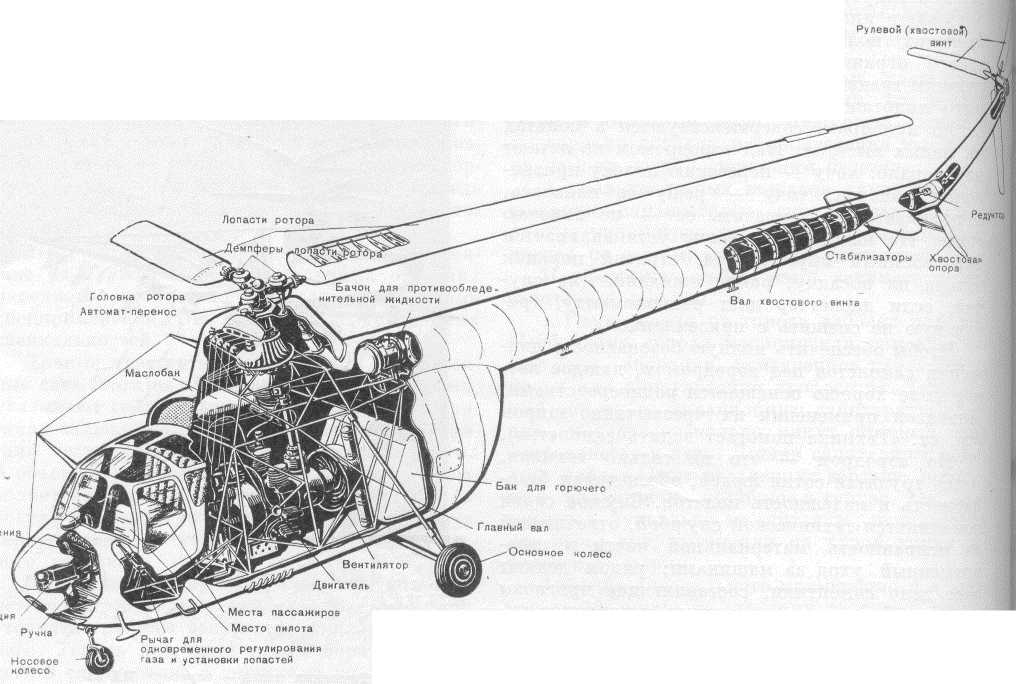 Провода от аккумулятора до регулятора хода тоже не должны быть слишком длинными, но по другой причине. Если длинные провода от регулятора до электродвигателя создают радиопомехи, то слишком длинные провода от аккумулятора до регулятора создают угрозу для целостности самого регулятора хода.
Провода от аккумулятора до регулятора хода тоже не должны быть слишком длинными, но по другой причине. Если длинные провода от регулятора до электродвигателя создают радиопомехи, то слишком длинные провода от аккумулятора до регулятора создают угрозу для целостности самого регулятора хода.
Вход регулятора всегда шунтируют электролитические конденсаторы большой емкости, демпфирующие броски тока. Тем не менее, производители ограничивают максимально допустимую длину и этих проводов. Если же провода по конструкции модели должны быть длиннее, то в промежутке между регулятором и аккумулятором впаиваются дополнительные электролитические конденсаторы, шунтирующие провода питания. В некоторых случаях для снижения потерь энергии на аккумуляторе полезно добавить такие конденсаторы и с короткими проводами. Радикально это не улучшит работу силовой установки, но несколько процентов энергии за одну гонку прибавит. Поклонники отечественной элементной базы должны учитывать, что зарубежные электролитические конденсаторы обладают намного меньшей инерционностью, чем наши.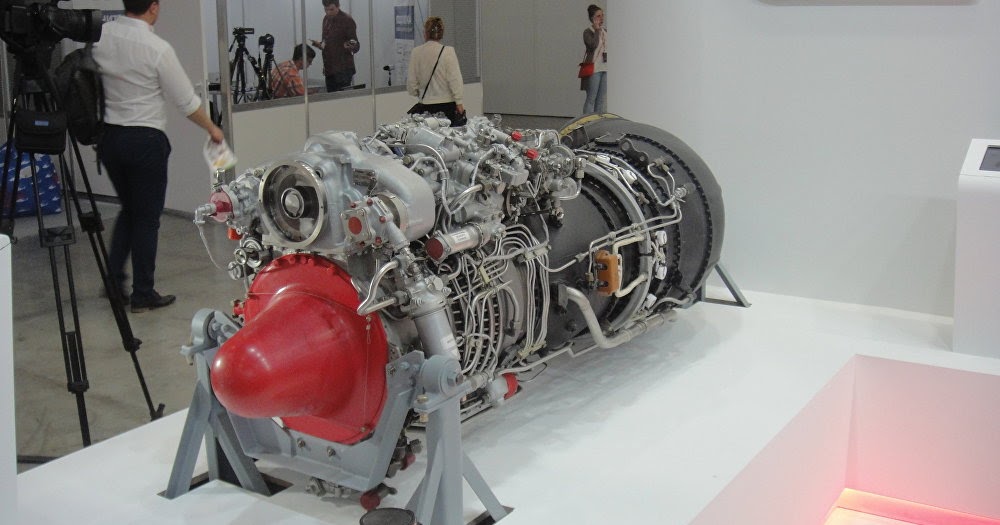 Если уж хочется сэкономить, то припаяйте параллельно нашему электролиту пленочный конденсатор. Хотя такая замена неравноценна установке специальных импульсных конденсаторов. Бывает, что от механических вибраций шунтирующие вход конденсаторы отламывают свои выводы «под корешок». При замене их на отечественные надо учитывать приведенные выше соображения.
Если уж хочется сэкономить, то припаяйте параллельно нашему электролиту пленочный конденсатор. Хотя такая замена неравноценна установке специальных импульсных конденсаторов. Бывает, что от механических вибраций шунтирующие вход конденсаторы отламывают свои выводы «под корешок». При замене их на отечественные надо учитывать приведенные выше соображения.
Разъемы. Между регулятором и двигателем провода, как правило, припаиваются, за исключением случаев, когда в конструкции двигателя или регулятора уже заложены разъемы. Между регулятором хода и аккумулятором приходится ставить разъем, потому что аккумулятор на электричке меняется как топливо — от старта к старту на свежезаряженный. Здесь надо применять только специальные модельные разъемы, как правило, в позолоченном исполнении. Обычные электро- или радиотехнические разъемы не рассчитаны на такие огромные токи, какие стали нормой в моделизме. Стык двухполюсный, и обязательно должен иметь механическую защиту от переполюсовки. Помните, регуляторы хода чаще всего не имеют защиты от переполюсовки. Как уже говорилось, практика показывает, что половина сгоревших регуляторов выходят из строя по этой причине. При использовании специальных отдельных разъемов типа гнездо — штекер, защиту делают так: плюс от аккумулятора распаивают на штекер, а минус — на гнездо. У регулятора хода наоборот. В этом случае защита будет обеспечена.
Помните, регуляторы хода чаще всего не имеют защиты от переполюсовки. Как уже говорилось, практика показывает, что половина сгоревших регуляторов выходят из строя по этой причине. При использовании специальных отдельных разъемов типа гнездо — штекер, защиту делают так: плюс от аккумулятора распаивают на штекер, а минус — на гнездо. У регулятора хода наоборот. В этом случае защита будет обеспечена.
Выключатель. В силовых проводах обычно не делают выключателей. Все регуляторы хода рассчитаны на длительное подключение силовой части при обесточенной сигнальной. Во многих регуляторах с ВЕС имеется отдельный выключатель, который подает питание на приемник и сервомашинки. В выключенном режиме ключи регулятора хода не разряжают (практически) силовой аккумулятор. Хотя, хранить аккумулятор в подключенном состоянии не надо!
Теплоотвод. Несмотря на высокий КПД современных регуляторов хода, на них все же выделяется заметное количество тепла, которое нужно отвести. Для облегчения этой задачи некоторые регуляторы имеет небольшие пластинчатые радиаторы. Размещение регулятора хода на модели должно обеспечивать обдув его корпуса набегающим потоком воздуха. Это правило часто вступает в противоречие с необходимостью защиты регулятора от влаги и грязи на авто- и судомоделях, где их заворачивают в герметичную оболочку. Для разрешения этой проблемы лучше всего брать регуляторы, рассчитанные на меньшее количество витков, а лучше — безлимитные. Их КПД гораздо выше и они рассеивают меньше тепла. Можно, конечно, не обращать внимания на все вышесказанное, и лепить соединения, как вздумается. Но тогда и результат может быть таким:
Размещение регулятора хода на модели должно обеспечивать обдув его корпуса набегающим потоком воздуха. Это правило часто вступает в противоречие с необходимостью защиты регулятора от влаги и грязи на авто- и судомоделях, где их заворачивают в герметичную оболочку. Для разрешения этой проблемы лучше всего брать регуляторы, рассчитанные на меньшее количество витков, а лучше — безлимитные. Их КПД гораздо выше и они рассеивают меньше тепла. Можно, конечно, не обращать внимания на все вышесказанное, и лепить соединения, как вздумается. Но тогда и результат может быть таким:
Многомоторные модели
На моделях с электроприводом гораздо чаще, чем у моделей с ДВС, используются многомоторные силовые установки. Это связано с тем, что электродвигатель, как объект управления, гораздо ближе к идеалу силового привода, чем ДВС. В многомоторных моделях, где необходимо раздельно управлять мощностью двигателей, на каждый из них ставится свой регулятор хода. Но так бывает не у всех моделей. Во многих случаях многомоторность есть дань копийности, либо стремление получить очень большую мощность, которая не может быть обеспечена имеющимися электродвигателями в одиночном варианте. В этом случае для коллекторных моторов совсем не обязательно использовать по отдельному регулятору хода. Вполне допустимо к одному регулятору подключать и несколько электродвигателей. При этом максимально допустимый продолжительный ток регулятора должен превышать суммарный потребляемый ток всех подключенных к нему электродвигателей.
Но так бывает не у всех моделей. Во многих случаях многомоторность есть дань копийности, либо стремление получить очень большую мощность, которая не может быть обеспечена имеющимися электродвигателями в одиночном варианте. В этом случае для коллекторных моторов совсем не обязательно использовать по отдельному регулятору хода. Вполне допустимо к одному регулятору подключать и несколько электродвигателей. При этом максимально допустимый продолжительный ток регулятора должен превышать суммарный потребляемый ток всех подключенных к нему электродвигателей.
Двигатели подключаются к регулятору хода параллельно друг другу. В таком соединении на частичных режимах их характеристики выравниваются. Как это понимать?
Представьте автомодель, на которой каждое колесо ведущего моста приводится от своего электродвигателя, которые соединены параллельно и подключены к одному регулятору хода. На частичных режимах (неполного газа) выходные мощности и моменты обоих двигателей зависят друг от друга. К примеру, если момент одного из колес уменьшится, — колесо забуксовало, то крутящий момент его электродвигателя также уменьшится, а у другого двигателя — увеличится. Получается автобалансировка по мощности и моменту, аналогичная по сути работе дифференциала повышенного трения — Торсен. Как правило, такое свойство параллельного соединения очень полезно для моделей. На максимальном газу, к сожалению, автобалансировка почти не работает.
К примеру, если момент одного из колес уменьшится, — колесо забуксовало, то крутящий момент его электродвигателя также уменьшится, а у другого двигателя — увеличится. Получается автобалансировка по мощности и моменту, аналогичная по сути работе дифференциала повышенного трения — Торсен. Как правило, такое свойство параллельного соединения очень полезно для моделей. На максимальном газу, к сожалению, автобалансировка почти не работает.
При последовательном присоединении моторов к одному регулятору хода их крутящие моменты примерно равны и слабо зависят от степени нагруженности. При буксовании одного из колес на неполном газу, момент другого, более нагруженного, двигателя даже несколько уменьшится. Такая зависимость крайне невыгодна для управляемости модели. Поэтому последовательное соединение на практике почти не используется.
А что же с бесколлекторными двигателями? Для бесколлекторников с датчиками, безусловно, необходимо ставить на каждый двигатель по своему регулятору хода. Для бессенсорных возможно (при определенных условиях) к одному регулятору подключать два двигателя. Главное условие — это благоприятный запуск двигателей, который обеспечивается малым необходимым моментом при пуске двигателей. Многие производители регуляторов хода считают такой режим нештатным, и не дают гарантии на качественную работу их изделий с двумя бесколлекторниками одновременно. Тем не менее, практика показывает вполне успешное использование одного регулятора с двумя двигателями на модели самолета. Теоретически возможный сбой при пуске на практике автором ни разу не наблюдался.
Для бессенсорных возможно (при определенных условиях) к одному регулятору подключать два двигателя. Главное условие — это благоприятный запуск двигателей, который обеспечивается малым необходимым моментом при пуске двигателей. Многие производители регуляторов хода считают такой режим нештатным, и не дают гарантии на качественную работу их изделий с двумя бесколлекторниками одновременно. Тем не менее, практика показывает вполне успешное использование одного регулятора с двумя двигателями на модели самолета. Теоретически возможный сбой при пуске на практике автором ни разу не наблюдался.
Недопустимо использовать с одним регулятором хода два бесколлекторных двигателя, если их валы жестко связаны друг с другом. К примеру, при работе через шестеренчатый редуктор на общий гребной вал.
Конструктивное исполнение регуляторов хода
Все многообразие конструкции регуляторов хода сейчас выродилось в два типа — регуляторы хода для низковольтных авто- и судомоделей делаются на одной печатной плате, помещенной в полистироловую коробочку с радиатором, или без:
Остальные типы регуляторов исполнены на одной или нескольких печатных платах, собранных в виде бутерброда в пакет и затянутых в термоусаживаемую трубку:
В регуляторах бесколлекторных двигателей на одной плате собрана схема управления, а на остальных — силовые ключи.
С одной и той же платой управления может быть собрано разное количество плат с ключами. Соответственно, разным будет и допустимый ток.
Регуляторы хода могут быть конструктивно объединены на одной плате с другой бортовой электроникой, как это сделано в пикоборте электровертолета:
Производители регуляторов хода
Регуляторы хода выпускает огромное количество моделистских фирм. Есть среди них изделия элитного плана — для спортсменов, а есть и ширпотреб. Соответственно изменяется и цена. Одним из ведущих брендов является фирма «Шульце-электроник». Хорошие регуляторы делает «Контроник», «LRP», «Jeti», «Castle Creations» и куча других. Краткий список сайтов фирм-производителей, специализирующихся на регуляторах хода:
- http://www.lrp-electronic.de
- http://www.teamnovak.com
- http://www.schulze-elektronik-gmbh. de
- http://www.kontronik.com
- http://www.jetimodel.cz
- http://www.castlecreations.com
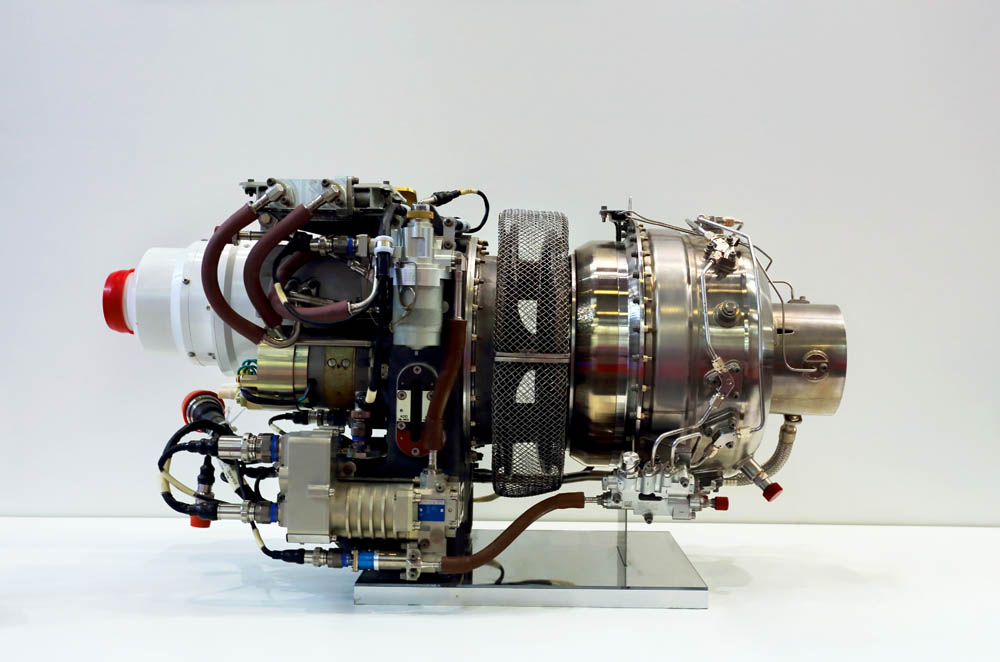 de
deПомимо них, регуляторы хода выпускают почти все крупные производители аппаратуры радиоуправления, а также многие производители автомоделей (Associated, DuraTrax, Traxxas). Многие модельные фирмы, такие как Graupner, Robbe, Great Planes, Global тоже выпускают регуляторы под собственной маркой. Даже наш отечественный «Термик» и то выпускал (сейчас — не знаю) недорогие регуляторы хода.
Рассуждая о качестве изготовления, нужно учитывать, что производитель зачастую сам только разрабатывает изделие (а иногда и это заказывает третьей фирме). Изготовление печатных плат и сборка чаще всего ведутся на Тайване. При этом на самом изделии об этом никаких следов не остается. Слоганы типа «Германское качество» или «Сделано в EU» — чистая реклама.
Принцип действия регуляторов хода
Регулятор хода включается между аккумулятором и силовым электродвигателем.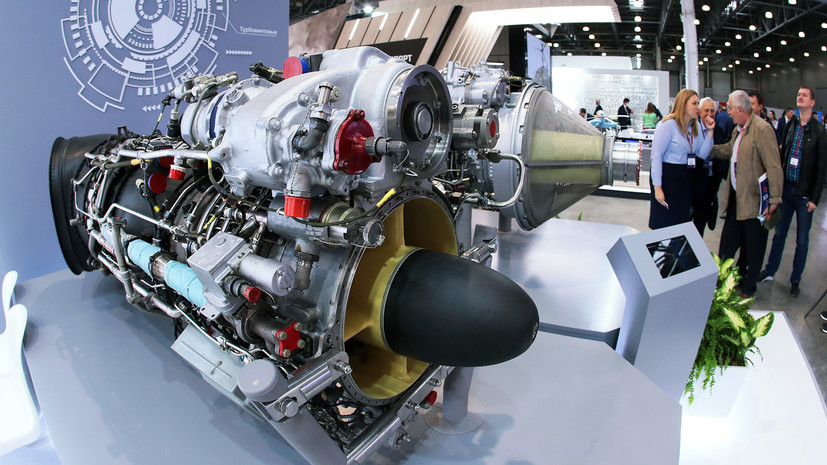 Управление регулятором осуществляет канальный импульс с приемника аппаратуры радиоуправления. Напомним его параметры: период — 20 мс, длительность изменяется от 1 до 2 мс. В простейшем случае в задачу регулятора входит регулирование потока мощности от аккумулятора к двигателю. При длительности канального импульса 1 мс — двигатель выключен, при 2 мс — двигатель развивает максимальную мощность. В промежутке мощность плавно изменяется. Как это происходит?
Управление регулятором осуществляет канальный импульс с приемника аппаратуры радиоуправления. Напомним его параметры: период — 20 мс, длительность изменяется от 1 до 2 мс. В простейшем случае в задачу регулятора входит регулирование потока мощности от аккумулятора к двигателю. При длительности канального импульса 1 мс — двигатель выключен, при 2 мс — двигатель развивает максимальную мощность. В промежутке мощность плавно изменяется. Как это происходит?
Прежде чем перейти к структурной схеме регулятора хода, отметим, что сейчас выпускаются исключительно импульсные регуляторы с широтно-импульсным регулированием. Другие варианты регулирования морально устарели и в наше время в моделизме не используются. Поэтому мы о них говорить не будем. Силовые электродвигатели бывают с коллектором и без. Соответственно, регуляторы хода можно разделить на два типа — для коллекторных двигателей и для бесколлекторных двигателей. Некоторые из регуляторов второго типа могут работать и с коллекторными моторами. Но не наоборот! Руководствуясь принципом от простого к сложному, мы расскажем вначале о работе простейшего регулятора коллекторного электродвигателя. Вот типовая структурная схема его включения:
Но не наоборот! Руководствуясь принципом от простого к сложному, мы расскажем вначале о работе простейшего регулятора коллекторного электродвигателя. Вот типовая структурная схема его включения:
- Г — управляющий генератор;
- К — силовой ключ;
- D — диод;
- М — электродвигатель;
- А — аккумулятор.
Канальный импульс поступает на управляемый генератор импульсов Г. Частота импульсов постоянна, а вот их длительность зависит от длительности входного канального импульса таким образом:
При длительности выходного импульса 0% — на выходе генератора их просто нет — там низкий уровень управляющего ключом сигнала. Ключ К — закрыт, ток через двигатель М не течет.
При длительности выходного импульса 100% от периода на выходе генератора тоже импульсов нет, но уровень управляющего ключом сигнала высокий. Ключ К — открыт и все напряжение от аккумулятора А приложено к двигателю М. Он развивает при этом максимальную мощность.
Ключ К — открыт и все напряжение от аккумулятора А приложено к двигателю М. Он развивает при этом максимальную мощность.
При промежуточном значении длительности канального импульса на выходе генератора присутствуют импульсы длительностью, определяемой по выше приведенному графику. Скажем, при канальном импульсе 1,5 мс на выходе генератора присутствуют импульсы, длительность которых составляет половину периода. Соответственно, ключ К половину периода открыт, половину — закрыт. Напряжение в т. 1 повторяет эту форму. Дотошный читатель может сказать, что на двигатель энергия подается импульсами, а значит, он должен дергаться и, дергаясь, крутиться в одну сторону. Чтобы понять, почему этого не происходит, придется немного вспомнить устройство и работу коллекторного двигателя постоянного тока. В школе все мы учили, что такой двигатель состоит из магнитного статора и ротора — в простейшем случае проволочной рамки, по которой течет ток. Магнитное поле статора взаимодействует с магнитным полем рамки так, что на нее начинает действовать сила Лоренца, пропорциональная согласно одноименного закона току в рамке.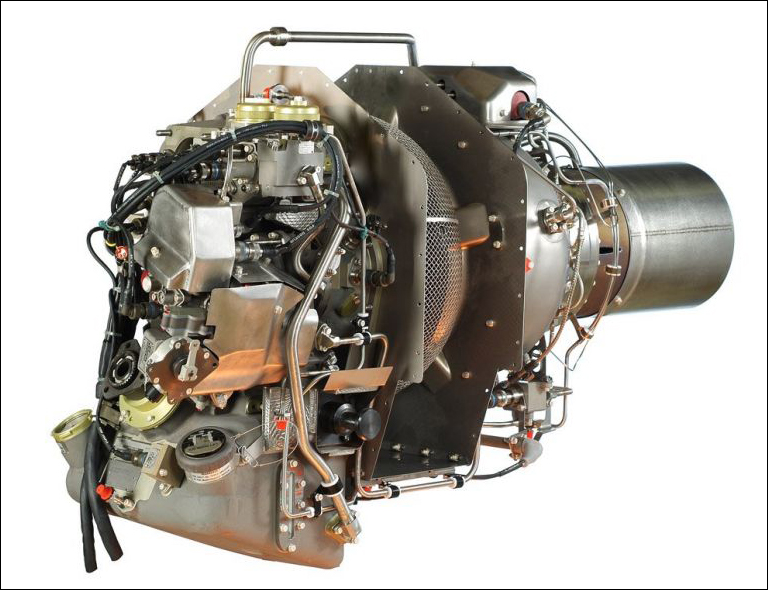 То есть момент ротора пропорционален току, а не напряжению. Обратим внимание, что рамка на магнитном сердечнике ротора обладает заметной индуктивностью L и сопротивлением R. Вспомним также, что коллекторная машина постоянного тока обратима. Если подать на нее напряжение — она работает как двигатель. Если же, наоборот, к ней подключить нагрузку и начать вращать ее ротор, то машина станет генератором, а в нагрузку потечет ток. Так вот, даже когда машина работает как двигатель, в обмотках ее ротора появляется напряжение Е, пропорциональное оборотам ротора. Для чего мы так долго и нудно рассуждали? Для того, чтобы нарисовать эквивалентную схему электродвигателя постоянного тока:
То есть момент ротора пропорционален току, а не напряжению. Обратим внимание, что рамка на магнитном сердечнике ротора обладает заметной индуктивностью L и сопротивлением R. Вспомним также, что коллекторная машина постоянного тока обратима. Если подать на нее напряжение — она работает как двигатель. Если же, наоборот, к ней подключить нагрузку и начать вращать ее ротор, то машина станет генератором, а в нагрузку потечет ток. Так вот, даже когда машина работает как двигатель, в обмотках ее ротора появляется напряжение Е, пропорциональное оборотам ротора. Для чего мы так долго и нудно рассуждали? Для того, чтобы нарисовать эквивалентную схему электродвигателя постоянного тока:
Для тех, кто не знает, что такое эквивалентная схема: вы не найдете в электродвигателе ни отдельной катушки, ни резистора, ни источника напряжения. Каждый миллиметр обмотки содержит и то, и другое, и третье. Собрав отдельно индуктивности, сопротивления и наведенное напряжение, мы получим эквивалентную схему, которая будет работать в цепи точно так, как настоящая обмотка ротора.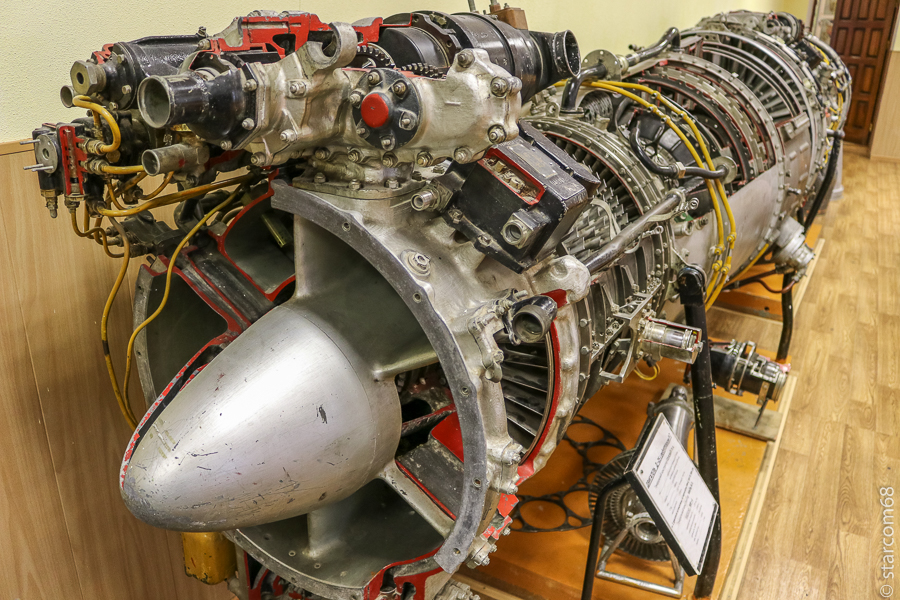 Теперь посмотрим, как потечет ток через двигатель, когда ключ открыт:
Теперь посмотрим, как потечет ток через двигатель, когда ключ открыт:
Заметьте, что ток течет против направления напряжения, наведенного в обмотках — это и есть полезная работа тока по вращению ротора. На сопротивлении часть энергии тока превращается в тепло — эта часть вредная, снижающая КПД двигателя. На индуктивности часть энергии запасается в магнитном поле катушки. Источником энергии для всех трех компонент здесь является аккумулятор.
Когда ключ закрывается, ток не прекращает свое движение и схема выглядит так:
Как видите, ток через двигатель продолжает течь в прежнем направлении. Источником энергии для него служит магнитное поле индуктивности, а диод — замыкает цепь в паузе, когда ключ К закрыт.
Поскольку вращающий момент ротора создает ток, а не напряжение на роторе, вам понятно, почему при импульсном питании двигателя двигатель не дрожит. Чтобы индуктивность могла запасать энергию и отдавать ее, ток через нее должен соответственно возрастать и убывать. Для уменьшения пульсаций тока индуктивность должна быть больше (больше суммарная запасенная энергия), а период импульсов меньше — меньше порции энергии, перекачиваемой туда — сюда. Так мы пришли к важнейшему принципу определения необходимой частоты работы регулятора хода. Она должна быть тем больше, чем меньше индуктивность обмоток ротора и больше мощность мотора.
Чтобы индуктивность могла запасать энергию и отдавать ее, ток через нее должен соответственно возрастать и убывать. Для уменьшения пульсаций тока индуктивность должна быть больше (больше суммарная запасенная энергия), а период импульсов меньше — меньше порции энергии, перекачиваемой туда — сюда. Так мы пришли к важнейшему принципу определения необходимой частоты работы регулятора хода. Она должна быть тем больше, чем меньше индуктивность обмоток ротора и больше мощность мотора.
А что будет, если частота генератора ниже оптимальной?
Энергии, запасенной в индуктивности обмоток двигателя в течение импульса, не будет хватать для сглаживания пульсаций тока в паузе между импульсами. Появится заметное дрожание ротора. Но это не страшно. Плохо другое: — уменьшится мощность двигателя, поскольку полезную работу совершает только постоянная компонента импульсного тока. Переменная же будет рассеиваться на магнитопроводе двигателя, нагревая его. Упадет КПД в связке регулятор хода — электродвигатель. Причем виновным окажется неправильно подобранный регулятор хода, а греться будет двигатель.
Причем виновным окажется неправильно подобранный регулятор хода, а греться будет двигатель.
Техническая реализация
Итак, мы рассмотрели принцип действия простейшего регулятора хода коллекторного модельного двигателя. Из чего и как делаются компоненты рассмотренной блок схемы? Исторический аспект здесь мы упоминать не будем. Управляемый генератор Г во всех без исключения современных регуляторах хода делается на программируемом микроконтроллере. Характеристика зависимости длительности импульсов управления ключом от длительности входного канального импульса формируется программным путем. В качестве коммутирующего силового ключа в регуляторах хода используются исключительно полевые транзисторы с изолированным затвором и каналом вертикальной структуры. За рубежом, да и у нас, их называют MOSFET-транзисторами. Они характеризуются низким сопротивлением в открытом состоянии и высоким быстродействием. В маломощных регуляторах хода может стоять один транзистор. Однако, как правило, для снижения сопротивления в открытом состоянии и увеличения максимального коммутируемого тока в параллель ставится много таких транзисторов — до 16 штук.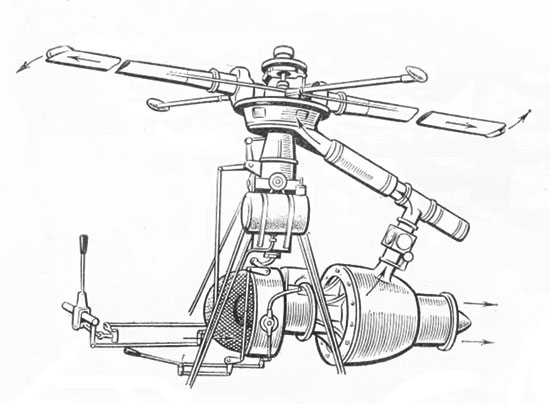 Чаще всего используются n-канальные транзисторы, поскольку они при равной с p-канальными стоимости имеют меньшее сопротивление в открытом состоянии и больший максимально допустимый ток. В обычных регуляторах используются транзисторы в корпусах ТО-220. В особо миниатюрных, а также регуляторах мощных бесколлекторных двигателей — в корпусе SO-8.
Чаще всего используются n-канальные транзисторы, поскольку они при равной с p-канальными стоимости имеют меньшее сопротивление в открытом состоянии и больший максимально допустимый ток. В обычных регуляторах используются транзисторы в корпусах ТО-220. В особо миниатюрных, а также регуляторах мощных бесколлекторных двигателей — в корпусе SO-8.
Тормоз. Электродвигатель на больших оборотах обладает приличной кинетической энергией. Как и куда она девается при торможении?
В регуляторах хода, реализующих функцию торможения, помимо ключа, дозирующего подачу энергии на двигатель от аккумулятора, ставится еще один ключ, параллельно двигателю:
Алгоритм функционирования тормозов такой: Когда управляющий канальный импульс находится в положении «Стоп» ключ К закрыт, а ключ К2 открыт. Мы помним, что при вращении ротора коллекторной машины постоянного тока она работает как генератор. Поэтому, если попытаться покрутить ротор двигателя, то вырабатываемая им энергия потечет через ключ К2. Ротор проворачиваться будет, но с заметным усилием, тем большим, чем больше скорость раскрутки ротора. При переводе джойстика передатчика в положение «Ход» начинает работу генератор импульсов регулируемой длительности, открывающий ключ К. Ключ К2 при этом закрывается. Двигатель начинает раскручиваться. Если после этого джойстик передатчика перевести снова в положение «Стоп», то ключ К закрывается, а ключ К2 открывается. Вырабатываемая энергия течет через открытый ключ К2 и превращается в тепло как на сопротивлении ключа, так и на сопротивлении обмоток самого двигателя. Кинетическая энергия ротора быстро перекачивается в тепловую. Поскольку сопротивление ключей маленькое, токи торможения получаются очень большими. На мощных регуляторах, чтобы не допустить перегрузки ключей и двигателя торможение делают не сразу резким, а плавным. Для этого в начале торможения ключ К2 управляется также от генератора импульсов переменной длительности.
Поэтому, если попытаться покрутить ротор двигателя, то вырабатываемая им энергия потечет через ключ К2. Ротор проворачиваться будет, но с заметным усилием, тем большим, чем больше скорость раскрутки ротора. При переводе джойстика передатчика в положение «Ход» начинает работу генератор импульсов регулируемой длительности, открывающий ключ К. Ключ К2 при этом закрывается. Двигатель начинает раскручиваться. Если после этого джойстик передатчика перевести снова в положение «Стоп», то ключ К закрывается, а ключ К2 открывается. Вырабатываемая энергия течет через открытый ключ К2 и превращается в тепло как на сопротивлении ключа, так и на сопротивлении обмоток самого двигателя. Кинетическая энергия ротора быстро перекачивается в тепловую. Поскольку сопротивление ключей маленькое, токи торможения получаются очень большими. На мощных регуляторах, чтобы не допустить перегрузки ключей и двигателя торможение делают не сразу резким, а плавным. Для этого в начале торможения ключ К2 управляется также от генератора импульсов переменной длительности. В низковольтных регуляторах хода в качестве тормозящих ключей чаще используют p-канальные MOSFET-транзисторы, потому что ими проще управлять. При использовании n-канального транзистора для управления делают схему смещения потенциала или ставят специальную микросхему — драйвер ключа. Наряду с возможностью торможения, дополнительный ключ, параллельный двигателю, избавляет от необходимости установки отдельного диода, имевшегося на схемах в начале статьи. Дело в том, что современные силовые MOSFET-транзисторы имеют внутри встроенный интегральный диод, который с успехом справляется. Тормозной ключ также выполняют из нескольких транзисторов, соединенных в параллель. Как правило, их меньше, чем в ключе К. Для гоночных автомоделей некоторые производители встраивают в регулятор хода имитацию ABS-тормозов больших автомобилей. Заключается она в прерывистом торможении. Имитацией потому, что никакого слежения за вращением колес здесь нет. Ее эффективность эквивалентна случаю, когда мы, едучи в настоящем автомобиле по скользкой дороге, прерывисто тормозим.
В низковольтных регуляторах хода в качестве тормозящих ключей чаще используют p-канальные MOSFET-транзисторы, потому что ими проще управлять. При использовании n-канального транзистора для управления делают схему смещения потенциала или ставят специальную микросхему — драйвер ключа. Наряду с возможностью торможения, дополнительный ключ, параллельный двигателю, избавляет от необходимости установки отдельного диода, имевшегося на схемах в начале статьи. Дело в том, что современные силовые MOSFET-транзисторы имеют внутри встроенный интегральный диод, который с успехом справляется. Тормозной ключ также выполняют из нескольких транзисторов, соединенных в параллель. Как правило, их меньше, чем в ключе К. Для гоночных автомоделей некоторые производители встраивают в регулятор хода имитацию ABS-тормозов больших автомобилей. Заключается она в прерывистом торможении. Имитацией потому, что никакого слежения за вращением колес здесь нет. Ее эффективность эквивалентна случаю, когда мы, едучи в настоящем автомобиле по скользкой дороге, прерывисто тормозим. Иногда это выручает. Но это не настоящая ABS.
Иногда это выручает. Но это не настоящая ABS.
Реверс. Реверсивные регуляторы хода (нереверсивные регуляторы называют еще прямоходными ) устроены так:
Как видно из схемы, электродвигатель включен в диагональ моста из ключей. При открытии ключей К1 и К3 двигатель вращается в прямом направлении:
а при открытии К2 и К4 — в обратном:
Как правило, в верхних плечах моста используются p-канальные транзисторы, а в нижних n-канальные. К1 либо К2 открыт в течение всего времени вращения двигателя в одном направлении. К3 либо К4 открывается импульсным сигналом регулируемой длительности, который плавно изменяет подаваемую на двигатель мощность. Из соображений экономии, как правило, реверсивные регуляторы делают несимметричными. В плечах моста для прямого хода К1 и К3 ставят в параллель гораздо больше транзисторов, чем в плечах К2 и К4 обратного хода. Чтобы регулятор при этом не сгорел от перегрузки при длительном реверсе, в некоторых регуляторах вводят автоматическое ограничение времени реверса. У одной из линеек реверсивных регуляторов LRP оно составляет около 5 секунд. Этого хватает, чтобы модель автомобиля отъехала назад от препятствия. А ключи перегреться не успеют.
В плечах моста для прямого хода К1 и К3 ставят в параллель гораздо больше транзисторов, чем в плечах К2 и К4 обратного хода. Чтобы регулятор при этом не сгорел от перегрузки при длительном реверсе, в некоторых регуляторах вводят автоматическое ограничение времени реверса. У одной из линеек реверсивных регуляторов LRP оно составляет около 5 секунд. Этого хватает, чтобы модель автомобиля отъехала назад от препятствия. А ключи перегреться не успеют.
Из схемы включения уже видно, что при равном количестве ключей в каждом плече, прямоходный регулятор обладает вдвое меньшим внутренним сопротивлением, чем реверсивный, хотя заметно дешевле его, так как использует почти вчетверо меньше дорогих MOSFET-транзисторов. К примеру, популярный регулятор серии Квантум от LRP в прямоходном исполнении имеет сопротивление 6 мОм, а в реверсивном 30 (ключей в плече у него меньше). Таким образом, не стоит применять реверсивные регуляторы там, где они не очень нужны. Это — деньги на ветер.
Динамическое торможение в реверсивном регуляторе делается открытием ключей обоих нижних плеч моста при закрытых верхних:
ВЕС. ВЕС представляет из себя чаще всего простейший параметрический стабилизатор на 5 вольт на дискретных элементах, либо в интегральном исполнении (т.н. линейный стабилизатор). Здесь может быть проблема с перегрузкой мощными сервомашинками этого стабилизатора с просадкой напряжения и последующим отказом системы радиоуправления. Подробнее об этом написано в статье про сервомашинки.
ВЕС представляет из себя чаще всего простейший параметрический стабилизатор на 5 вольт на дискретных элементах, либо в интегральном исполнении (т.н. линейный стабилизатор). Здесь может быть проблема с перегрузкой мощными сервомашинками этого стабилизатора с просадкой напряжения и последующим отказом системы радиоуправления. Подробнее об этом написано в статье про сервомашинки.
Опторазвязка. В мощных регуляторах на повышенные напряжения — от 15 до 36 банок аккумуляторов встраивают гальваническую развязку силовых цепей от цепей приемника системы радиоуправления. Это делается для того, чтобы мощные импульсные помехи из силовой части регулятора и двигателя не попали на входные высокочувствительные цепи приемника. В этом случае типовая входная цепь регулятора выглядит так:
Для развязки используется, как правило, обычный диодно-транзисторный оптрон. В этом случае о ВЕС-системе говорить не приходится, а на модели стоит отдельный бортовой аккумулятор.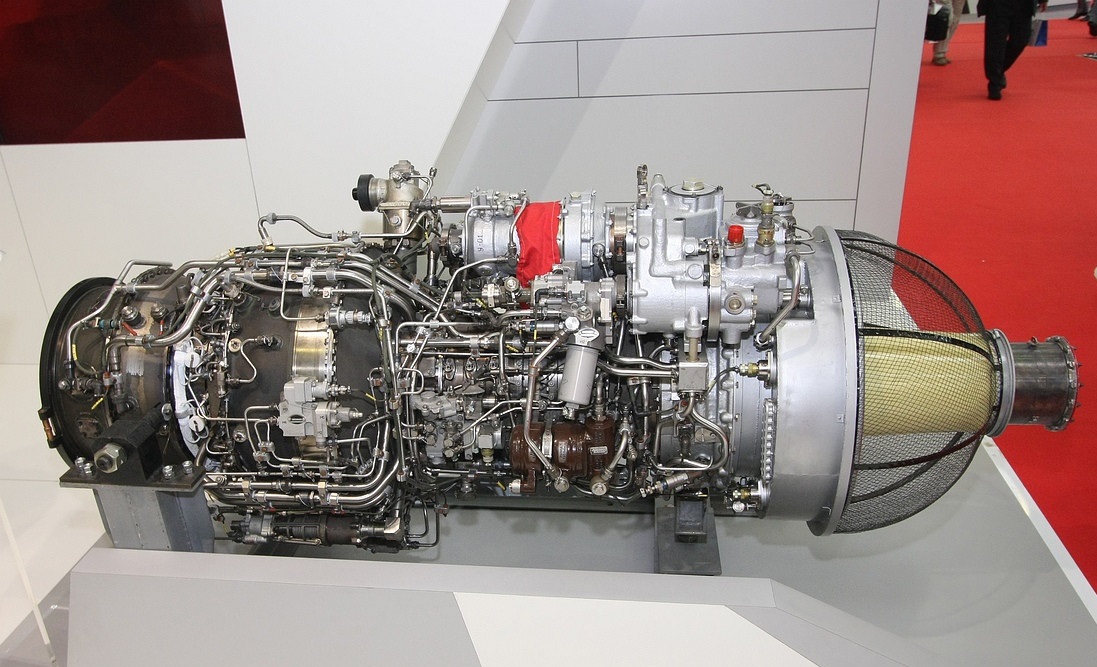
Принцип работы регулятора бесколлекторного электродвигателя
Во введении мы упоминали, что на моделях применяются только электродвигатели постоянного тока с возбуждением только от постоянных магнитов и с коллектором или без. Прежде чем перейти к бесколлекторным регуляторам, посмотрим, что делает коллектор в двигателе и чем он плох. В сущности, задача коллекторно-щеточного узла проста: при определенном положении ротора подавать напряжение с аккумулятора на определенные секции его обмоток. Плох же коллектор тем, что он изнашивается, причем тем быстрее, чем больше мощность мотора. Разрушению его элементов помимо простого механического износа способствуют много факторов, к которым можно отнести повышенную температуру, электроэрозионные процессы, загрязнение продуктами износа щеток и т.п. Кроме того, на этот узел приходится значительная часть потерь энергии, снижающей суммарный КПД электродвигателя. Чтобы решить все проблемы разом, придумали передать функции переключения обмоток в зависимости от положения ротора регулятору хода. В электродвигателе обмотки и постоянные магниты поменяли местами. Т.е. на ротор переместились постоянные магниты, а обмотки размещены в пазах неподвижного статора. Все секции обмоток соединены в три группы (три фазы), которые могут присоединяться к регулятору хода звездой или треугольником:
В электродвигателе обмотки и постоянные магниты поменяли местами. Т.е. на ротор переместились постоянные магниты, а обмотки размещены в пазах неподвижного статора. Все секции обмоток соединены в три группы (три фазы), которые могут присоединяться к регулятору хода звездой или треугольником:
Достоинства обоих видов соединения мы здесь рассматривать не будем, это предмет моторостроения. Помимо этого, в двигатель встраиваются три датчика положения ротора. Они бывают на основе оптопары с открытым оптическим каналом, но чаще — на основе датчиков Холла. Схема включения при этом выглядит так:
Как видите обмотки двигателя, соединенные звездой подключены к трехфазному мосту из ключей К1-К6. Управляет ключами моста специальный контроллер К. Информацию о положении ротора он получает от датчиков Д1-Д3.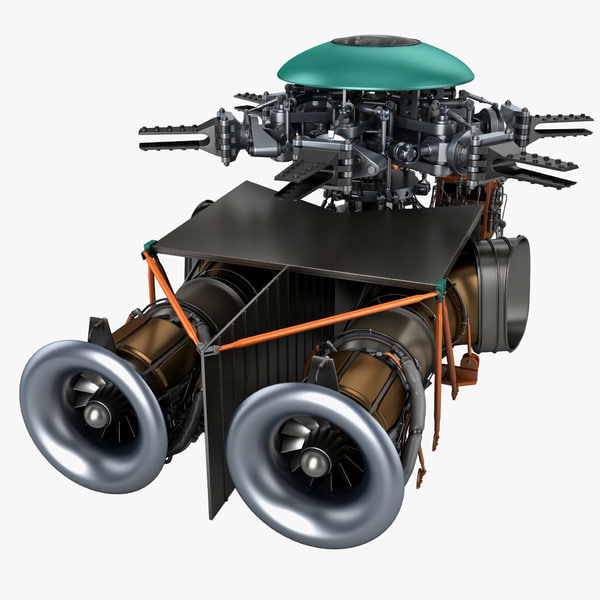 Контроллер трудно выполнить на основе программируемого микроконтроллера, поскольку для коммутации нужно высокое быстродействие. Поэтому в серийных регуляторах хода бесколлекторных двигателей ставят специализированную микросхему — ASIC (например, в регуляторах фирмы Schulze), либо программируемую логическую интегральную схему — ПЛИС- FPGA (например, в регуляторах фирмы Kontronik). Можно собрать ее и на дискретных элементах, но это сложно и громоздко. В последнее время появились довольно скоростные микроконтроллеры с тактовой частотой в десятки мегагерц. На их основе можно сделать программным путем контроллер для не слишком скоростных электродвигателей. Весьма перспективно формировать контроллер на базе программируемых сигнальных процессоров — DSP. Пример такого решения можно посмотреть здесь: http://www.2mslbldc.g4g-server.com/bauunterlagen.html. Как видно из описания, применение DSP резко упрощает изготовление регулятора хода, низводя его до сложности элементарного регулятора коллекторного двигателя, что очень привлекательно для самостоятельной его сборки.
Контроллер трудно выполнить на основе программируемого микроконтроллера, поскольку для коммутации нужно высокое быстродействие. Поэтому в серийных регуляторах хода бесколлекторных двигателей ставят специализированную микросхему — ASIC (например, в регуляторах фирмы Schulze), либо программируемую логическую интегральную схему — ПЛИС- FPGA (например, в регуляторах фирмы Kontronik). Можно собрать ее и на дискретных элементах, но это сложно и громоздко. В последнее время появились довольно скоростные микроконтроллеры с тактовой частотой в десятки мегагерц. На их основе можно сделать программным путем контроллер для не слишком скоростных электродвигателей. Весьма перспективно формировать контроллер на базе программируемых сигнальных процессоров — DSP. Пример такого решения можно посмотреть здесь: http://www.2mslbldc.g4g-server.com/bauunterlagen.html. Как видно из описания, применение DSP резко упрощает изготовление регулятора хода, низводя его до сложности элементарного регулятора коллекторного двигателя, что очень привлекательно для самостоятельной его сборки.
В контроллере зашито несколько вариантов коммутации, включающих прямой ход, реверс, торможение, отключение обмоток. Что именно должен делать контроллер, ему подсказывает устройство управления У, которое анализирует длительность канального импульса. Здесь же формируются импульсы переменной длительности для регулирования мощности двигателя. Управляют они через контроллер К ключами только нижних плеч трехфазного моста, аналогично реверсивным регуляторам коллекторных двигателей. Устройство У реализуется на обычном микроконтроллере. Силовые ключи, как и в обычных регуляторах хода, формируются из нескольких MOSFET-транзисторов. В одном из регуляторов Kontronik-а в каждом плече стоит по 16 транзисторов. Всего в регуляторе получается 16*6=96 транзисторов! Вот почему они такие дорогие. Чтобы регулятор получился компактным и легким, транзисторы берутся в миниатюрном корпусе SO-8. Для управления таким множеством ключей используют специальные микросхемы-драйверы ключей. Как правило, в регуляторах бесколлекторных двигателей присутствуют все описанные выше сервисно-защитные функции.
Регуляторы хода бесколлекторных бессенсорных электродвигателей
Когда ротор двигателя вращается, в его обмотках наводится напряжение, которое можно использовать для определения положения ротора. Эта идея реализована в регуляторах хода бесколлекторных электродвигателей, которым не нужны датчики положения ротора. Вместо них используются обмотки статора. Типовая схема определения момента коммутации обмотки для одной фазы выглядит так:
В схеме используется компаратор и делители напряжения на резисторах. В качестве компаратора большинство фирм использует микросхему L339. Поскольку на напряжение наводки накладывается поданное с аккумулятора на обмотки тяговое напряжение, результат компарирования необходимо стробировать в контроллере, — принимать только тот переход через 0, который не совпадает по времени с коммутированием обмоток. Впрочем, если это уже не понятно, то не стоит ломать голову. Важно одно: пока ротор не вращается, такое определение положения не работает. Чтобы запустить неподвижный двигатель, вводится режим пуска. Контроллер начинает переключать обмотки последовательно, независимо от положения ротора с небольшой скоростью. Как только ротор сдвинется, появится обратная связь, и двигатель выйдет на режим.
Важно одно: пока ротор не вращается, такое определение положения не работает. Чтобы запустить неподвижный двигатель, вводится режим пуска. Контроллер начинает переключать обмотки последовательно, независимо от положения ротора с небольшой скоростью. Как только ротор сдвинется, появится обратная связь, и двигатель выйдет на режим.
Конструктивно двигатель без датчиков проще, чем с датчиками. Но у этой системы есть и недостатки. Такие электродвигатели плохо стартуют, не развивая с места полного вращающего момента, что, к примеру, для автомоделей крайне важно. При перегрузке на низких оборотах система определения положения ротора без датчиков работает ненадежно. На разных оборотах оптимален разный сдвиг фаз между сигналом обратной связи и моментом коммутации обмоток. Особо продвинутые регуляторы хода это учитывают. В двигателях с датчиками это учитывается автоматически. Наконец, регулятор хода, не требующий датчиков, сложнее и дороже. На летающих моделях применяются в основном бессенсорные двигатели и регуляторы. На автомоделях — с датчиками.
На автомоделях — с датчиками.
Теоретикам
Для моделистов, которым интересно не только запускать радиоуправляемые модели, но и понимать суть происходящих внутри процессов, может быть интересен данный раздел.
Известно, что внешняя нагрузочная характеристика электродвигателя постоянного тока с возбуждением от постоянных магнитов сильно зависит от режима его питания. Поэтому многие моделисты спрашивают, что именно регулирует импульсный регулятор хода: — напряжение, подаваемое на электродвигатель, или его ток?
Формат статьи не позволяет привести здесь подробные теоретические выкладки. Поэтому перейдем сразу к выводам. Как это ни парадоксально, но с точки зрения нагрузочных характеристик электродвигателя, импульсный регулятор хода эквивалентен примитивному реостатному регулятору, упомянутому во введении к статье. Т.е. импульсный регулятор хода регулирует не напряжение, подаваемое на двигатель, и не его ток. Он регулирует сопротивление источника питания двигателя, а значит, подаваемую на него мощность.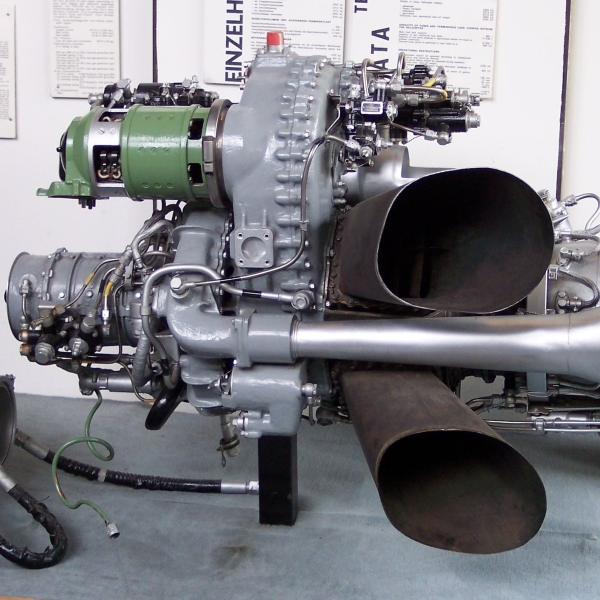
Сразу оговоримся, что идеальный импульсный регулятор хода эквивалентен регулируемому балластному реактивному сопротивлению. Чем реактивный балласт отличается от активного? Тем, что на нем не рассеивается энергия. Действительно, через идеальный регулятор течет ток в те моменты, когда падение напряжения на нем равно нулю. Когда же падение напряжения на регуляторе не равно нулю — ток через него не течет. Поэтому интеграл от произведения мгновенных значений тока на напряжение на любом интервале времени будет равен нулю. Для переменного тока реактивные балласты широко известны и применяются, например, в люминесцентных лампах дневного света. Кстати, за рубежом повсеместно переходят на питание люминесцентных ламп от выпрямленного (постоянного) напряжения через импульсный реактивный балласт, совершенно аналогичный регулятору хода. На нашем сайте как-то предлагался зарядник аккумуляторов с набором реактивных балластов на конденсаторах — типовое решение для простейших сетевых зарядников.
Для электродвигателя без разницы, реактивный или активный балласт регулирует его мощность. Главное — он изменяет сопротивление источника питания двигателя.
Современные модельные электродвигатели обладают довольно жесткой внешней характеристикой при питании от стабильного источника напряжения. Особенно это характерно для двигателей с редкоземельными магнитами. Косвенно коэффициент жесткости внешней нагрузочной характеристики электродвигателя можно оценить по отношению тока заблокированного ротора к току при максимальном КПД. Для ферритовых моторов это значение колеблется около 7-8. Для самарий-кобальтовых и неодимовых моторов, как правило, больше 10.
Однако жесткость нагрузочных характеристик будет наблюдаться только на максимальном газу. По мере уменьшения газа, эквивалентное сопротивление источника для электродвигателя растет, и нагрузочная характеристика двигателя становится мягче. Ток блокировки падает быстрее тока максимального КПД. При этом обороты холостого хода уменьшаются незначительно. Плохо это или хорошо? Смотря для чего. С точки зрения снижения токовых перегрузок на пусковых режимах это неплохо. Мягкая нагрузочная характеристика облегчает плавность регулирования ускорением модели, придает ей этакую вальяжность. Вместе с тем, страдает разгонная динамика. Для гоночных автомобилей на сухом покрытии с хорошим сцеплением полезно иметь силовую установку с хорошей динамикой раскрутки. Чтобы компенсировать умягчение характеристики, в продвинутых автомобильных регуляторах вводят перерегулирование при динамичных перемещениях курка газа. Как это происходит, лучше пояснить на графике движения курка газа передатчика и мощности, подаваемой на двигатель.
Плохо это или хорошо? Смотря для чего. С точки зрения снижения токовых перегрузок на пусковых режимах это неплохо. Мягкая нагрузочная характеристика облегчает плавность регулирования ускорением модели, придает ей этакую вальяжность. Вместе с тем, страдает разгонная динамика. Для гоночных автомобилей на сухом покрытии с хорошим сцеплением полезно иметь силовую установку с хорошей динамикой раскрутки. Чтобы компенсировать умягчение характеристики, в продвинутых автомобильных регуляторах вводят перерегулирование при динамичных перемещениях курка газа. Как это происходит, лучше пояснить на графике движения курка газа передатчика и мощности, подаваемой на двигатель.
Здесь черная линия — команда на управление газом от курка, красная — фактически подаваемая мощность на двигатель.
По внешнему эффекту такое перерегулирование напоминает систему kick-down в крутых автомобилях с автоматической КПП. Там при резкой даче газа автомат переключается на ступень вниз с одновременным обогащением смеси в двигателе на мощностной режим. При этом разгон автомобиля резко улучшается. Величина перерегулирования устанавливается при настройке многофункциональных регуляторов хода в числе других параметров, либо имеется в наборах предустановленных параметров под определенные трассы. На скользком покрытии такое перерегулирование очень вредно, поскольку провоцирует срыв колес в занос. Впрочем, на настоящих автомобилях происходит так же — включение режима kick-down на обледенелой дороге неотвратимо приведет к заносу. У винтовых движителей моделей — гребных и воздушных винтов — нет такой жесткой механической связи со средой, как в автомодели, поэтому для них нет необходимости компенсировать умягчение характеристики электродвигателя.
Там при резкой даче газа автомат переключается на ступень вниз с одновременным обогащением смеси в двигателе на мощностной режим. При этом разгон автомобиля резко улучшается. Величина перерегулирования устанавливается при настройке многофункциональных регуляторов хода в числе других параметров, либо имеется в наборах предустановленных параметров под определенные трассы. На скользком покрытии такое перерегулирование очень вредно, поскольку провоцирует срыв колес в занос. Впрочем, на настоящих автомобилях происходит так же — включение режима kick-down на обледенелой дороге неотвратимо приведет к заносу. У винтовых движителей моделей — гребных и воздушных винтов — нет такой жесткой механической связи со средой, как в автомодели, поэтому для них нет необходимости компенсировать умягчение характеристики электродвигателя.
Заключение
В заключение, о традиционном философском вопросе моделиста — брать готовый регулятор, или делать самому. В отличие от редких случаев успешной самодельной аппаратуры радиоуправления, самодельные регуляторы хода гораздо более распространены. Особенно для обычных коллекторных двигателей. Это изделие принадлежит к той категории электроприборов, которые, будучи грамотно спроектированы и без ошибок смонтированы из заведомо годных деталей, не требуют настройки и регулировки, а работают сразу. Можно ли на этом сэкономить? Можно, и прилично. Поэтому, умеющие держать паяльник в руках, — дерзайте.
Особенно для обычных коллекторных двигателей. Это изделие принадлежит к той категории электроприборов, которые, будучи грамотно спроектированы и без ошибок смонтированы из заведомо годных деталей, не требуют настройки и регулировки, а работают сразу. Можно ли на этом сэкономить? Можно, и прилично. Поэтому, умеющие держать паяльник в руках, — дерзайте.
По регуляторам бесколлекторных двигателей — это несколько сложнее. Оцените сначала, посильна ли для вас технология их монтажа и сборки? Весьма плотный SMD-монтаж требует специальных навыков работы. Это тоже возможно, но не любыми руками. Да и времени потребует несопоставимо больше. В промышленных условиях монтаж плат ведет автомат, и только сборка плат в пакет идет вручную. Трудно соревноваться с умными машинами.
При самостоятельной разработке оригинальных схем нужно учитывать много особенностей современной силовой электроники. Иначе будет дым и разочарование.
Что касается ремонта регуляторов хода — это дело по силам многим.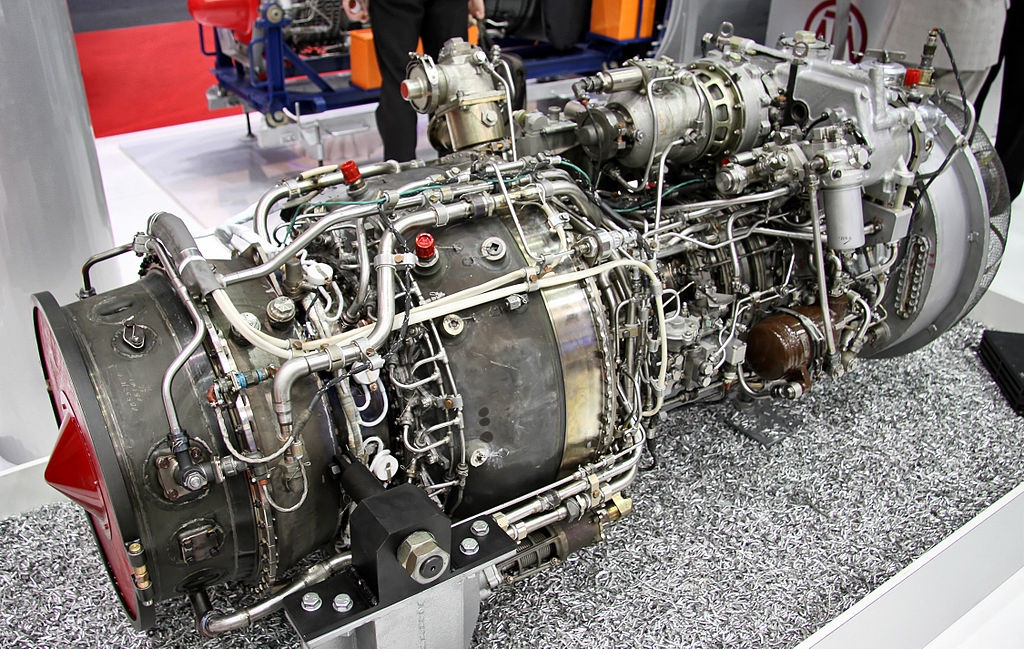 Автор отремонтировал десятки различных регуляторов как обычных, так и бесколлекторных моторов. Если платы не выгорели в дым — все можно восстановить.
Автор отремонтировал десятки различных регуляторов как обычных, так и бесколлекторных моторов. Если платы не выгорели в дым — все можно восстановить.
Обсудить на форуме
Вертолетный двигатель
и принцип его работы
Одним из наиболее распространенных сегодня вертолетных двигателей является турбовальный двигатель .
Турбовальный двигатель фактически является реактивным двигателем и обычно работает на топливе на основе керосина. Существует много вариантов турбовальных двигателей, но все они следуют основным концепциям и принципам. Для простоты я буду иметь в виду двигатель, используемый в Bell 206 JetRanger. Роллс-Ройс Эллисон 250/c20J.
Рабочий цикл газотурбинного двигателя аналогичен циклу поршневого двигателя. Есть впуск, сжатие, горение и выхлоп. Основное отличие состоит в том, что, в отличие от поршневого двигателя, циклы газотурбинных двигателей непрерывны. В отличие от авиационных реактивных двигателей, где выхлопные газы обеспечивают тягу, выхлопные газы турбовального двигателя вертолета перехватываются турбиной, которая передает энергию этих газов на редуктор, обеспечивающий мощность вертолета.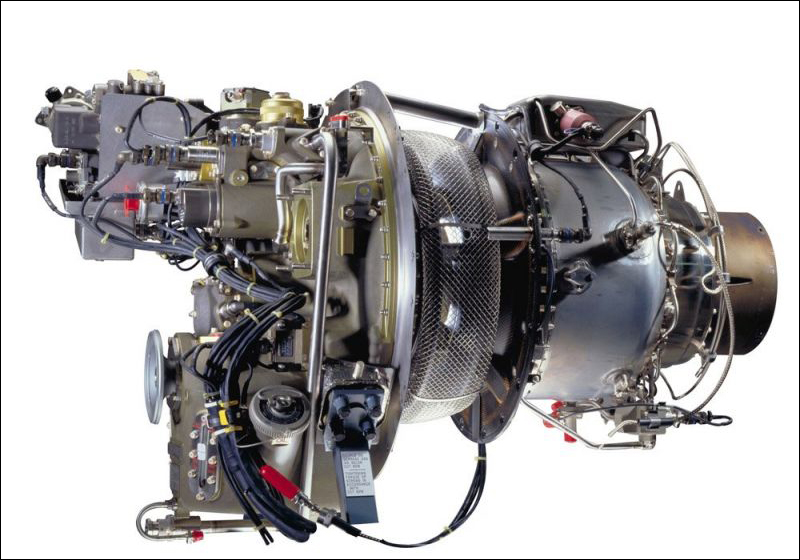
Жизненно важно, чтобы вы научились не перегружать двигатель и не перегревать его, так как это может иметь катастрофические последствия для того, кто летит на нем, недели или даже месяцы спустя. Неправильное использование двигателя не обязательно приведет к немедленной проблеме.
Запуск двигателя вертолета вызывает большую нагрузку на компоненты, чем любая другая операция, из-за теплового удара и износа. По этой причине стартовые циклы подсчитываются и записываются в технический журнал после каждого полета. Поскольку вертолеты, как правило, летают в течение более коротких периодов времени по сравнению с самолетами, возможно, что двигатель может достичь предела количества запусков до того, как он достигнет предела полезного срока службы. Запуск стоит дорого, поэтому лучше оставить двигатель включенным на десять минут, ожидая пассажира, а не глушить двигатель, а затем снова запускать.
Запуск двигателя полностью зависит от аккумулятора или вспомогательной силовой установки (ВСУ). Двигатель должен вращаться достаточно быстро, чтобы через турбину проходил достаточно холодный воздух, в противном случае она станет очень горячей и повредит внутренние компоненты. Слабая батарея может разрядиться до того, как процесс горения станет самоподдерживающимся, и это будет иметь катастрофические последствия.
Двигатель должен вращаться достаточно быстро, чтобы через турбину проходил достаточно холодный воздух, в противном случае она станет очень горячей и повредит внутренние компоненты. Слабая батарея может разрядиться до того, как процесс горения станет самоподдерживающимся, и это будет иметь катастрофические последствия.
A «Зависший старт» может произойти, если двигатель не разгоняется, а число оборотов остается постоянно низким. Это расходует заряд батареи, и если батарея разряжается, двигатель замедляется, все меньше и меньше холодного воздуха проходит через двигатель, и, следовательно, температура в камере сгорания становится очень высокой в течение нескольких секунд, вызывая много повреждений. .
A «Мокрый пуск» эквивалентно залитому двигателю, когда воспламенитель не смог воспламенить топливо. Подождите не менее 5 минут, а затем прокачайте двигатель. Поскольку батарея уже частично разряжена из-за неудачного запуска и вентиляции, вероятно, будет хорошей идеей получить внешний запуск с помощью APU, чтобы убедиться, что у вас не разрядится при следующей попытке запуска.
Если вы будете точно следовать контрольному списку, то у вас не должно возникнуть проблем с запуском двигателя вертолета каждый раз. Наиболее частая причина, по которой я видел горячий запуск, — это пилоты с недостаточным временем запуска двигателя с уже частично (или полностью) открытой дроссельной заслонкой.
Поэтому крайне важно дважды проверить, полностью ли закрыта дроссельная заслонка, прежде чем нажимать кнопку стартера.
Турбинным двигателям требуется время для «раскрутки» или «раскрутки вниз» при изменении мощности. По этой причине вы должны очень плавно управлять дроссельной заслонкой, чтобы предотвратить «помпаж» двигателя. Помпаж может произойти, когда поток воздуха над лопастями компрессора нарушается, что приводит к их остановке. Это приводит к громким хлопкам (похожим на выстрелы дробовика) и очень заметной вибрации двигателя. Немедленно отключитесь, если это произойдет во время запуска.
Воздухозаборник
Воздухозаборник предназначен для стабилизации воздуха перед его подачей в компрессор. В этом месте может быть установлен сепаратор частиц для удаления любых посторонних веществ, таких как пыль или песок, которые могут вызвать эрозию лопаток компрессора.
В этом месте может быть установлен сепаратор частиц для удаления любых посторонних веществ, таких как пыль или песок, которые могут вызвать эрозию лопаток компрессора.
Компрессор
Компрессор состоит из ряда лопастей и крыльчатого (или центробежного) компрессора. Он предназначен для забора большого количества воздуха и его сжатия перед направлением в секцию сгорания.
Двигатель JetRanger оснащен шестиступенчатым осевым компрессором и компрессором с одной крыльчаткой.
В осевом компрессоре каждая ступень отделена лопатками статора, чтобы воздух попадал на следующие лопатки под правильным углом. Когда воздух проходит мимо этих лопастей, он сжимается все больше и больше. Давление повышается, а его скорость уменьшается.
Центробежный компрессор отводит воздух наружу в каналы, ведущие к секции сгорания, при этом дополнительно сжимая воздух.
Во время запуска имеется выпускной клапан, который открывается и позволяет части воздуха выйти из компрессора. Это облегчает разгон двигателя и потребляет меньше энергии от аккумулятора. Когда двигатель достигает устойчивой скорости, клапан автоматически закрывается.
Это облегчает разгон двигателя и потребляет меньше энергии от аккумулятора. Когда двигатель достигает устойчивой скорости, клапан автоматически закрывается.
Из-за высоких температур сжатого воздуха в компрессорной части (до 250 градусов Цельсия) этот воздух используется для обогрева салона и для защиты от обледенения. Система защиты от обледенения использует воздух из задней части компрессора и направляет его через корпус компрессора и входные направляющие лопатки для предотвращения образования на них льда. При использовании защиты от обледенения будет небольшое повышение температуры на выходе из турбины (TOT).
Секция сгорания
В этой секции топливо смешивается с воздухом и воспламеняется. Воздуховоды имеют такую форму, что пламя никогда не соприкасается с металлическим корпусом, а вместо этого находится внутри кожуха более холодного воздуха. Большая часть воздуха используется для охлаждения.
2.972 Как передается мощность в вертолете
| КАК ЭТО СИЛА ПЕРЕВОЗИМ НА ВЕРТОЛЕТЕ | ||
| ВОПРОСЫ ИЛИ КОММЕНТАРИИ | ||
| АВТОР: | Мигель Анхель Чавес | |
| ЭЛЕКТРОННАЯ ПОЧТА: | mike49@mit.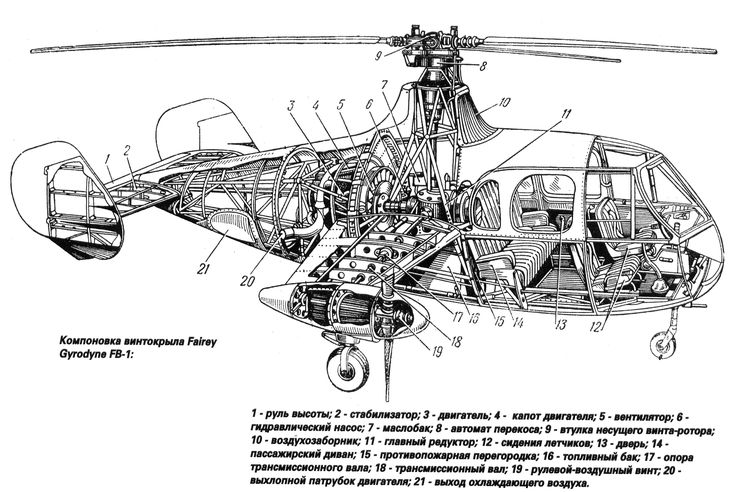 edu edu | |
| КУРС: | 2 | |
| КЛАСС/ГОД: | 2 | |
ОСНОВНОЕ ФУНКЦИОНАЛЬНОЕ ТРЕБОВАНИЕ:
Для передачи энергии вращения от вала двигателя небольшого обычного вертолета к
привода несущего и рулевого валов.
КОНСТРУКТИВНЫЙ ПАРАМЕТР:
Система передачи энергии. Варьируется от вертолета к вертолету, но я представлю
наиболее распространенный тип для небольших обычных вертолетов.
ГЕОМЕТРИЯ/СТРУКТУРА:
| Рисунок 1 |
ОБЪЯСНЕНИЕ КАК ЭТО РАБОТАЕТ/ПРИМЕНЯЕТСЯ:
Целью системы передачи энергии вертолета является
отбирать мощность у двигателя и передавать ее другим компонентам, которые обеспечивают питание и контроль
вертолет. Трансмиссия принимает мощность двигателя (крутящий момент при
Трансмиссия принимает мощность двигателя (крутящий момент при
определенной угловой скорости) и передает ее роторам с другой
угловая скорость и крутящий момент (для предотвращения
повредить систему). Остальные компоненты являются основными и
коробки передач хвостового винта.
В зависимости от компоновки вертолета другие приводные валы и
коробки передач могут быть необходимы в различных местах. Несущий винт
редуктор служит для уменьшения скорости вращения вала двигателя. Это для
предотвратить вращение кончиков лопастей быстрее, чем
скорость звука. Это нежелательно, так как потребует
лезвия должны быть чрезвычайно прочными и
быть очень громким! Обычно частота вращения несущего винта составляет около
1/7 оборотов двигателя, но это зависит от модели. Редуктор хвостового винта имеет
те же функции, что и коробка передач несущего винта, хотя лопасти рулевого винта могут вращаться с
выше скорость вращения, так как длина лопастей намного меньше (скорость острия =
радиус * угловая скорость).
Хотя муфты различаются в зависимости от модели, наиболее распространены две
ременной и центробежной компоновки. Как, например, в вертолете R22 фирмы Robinson расположение сцепления такое
с ременным приводом. В таком расположении, которое в основном встречается на небольших вертолетах, шкив на
вал двигателя соединен со шкивом на ведущем валу, идущем к шестерне несущего винта
коробка и редуктор рулевого винта. См. рис. 1. Всего имеется
шесть шкивов и ремней рядом. Ремни свободно прилегают к двигателю и
шкивы приводного вала. Чтобы шкив вала двигателя приводил в движение верхний шкив,
пилот вертолета должен двигать регулируемый шкив, называемый ленивцем, и толкать его
против ремней. Это, в свою очередь, натягивает ремень и позволяет
шкив вала двигателя для привода ведущего вала. Регулируемый шкив толкается
против ремней с помощью рычага, активируемого пилотом, на старых моделях или с помощью электродвигателя на
более новые.
На верхнем шкиве имеется обжимная муфта.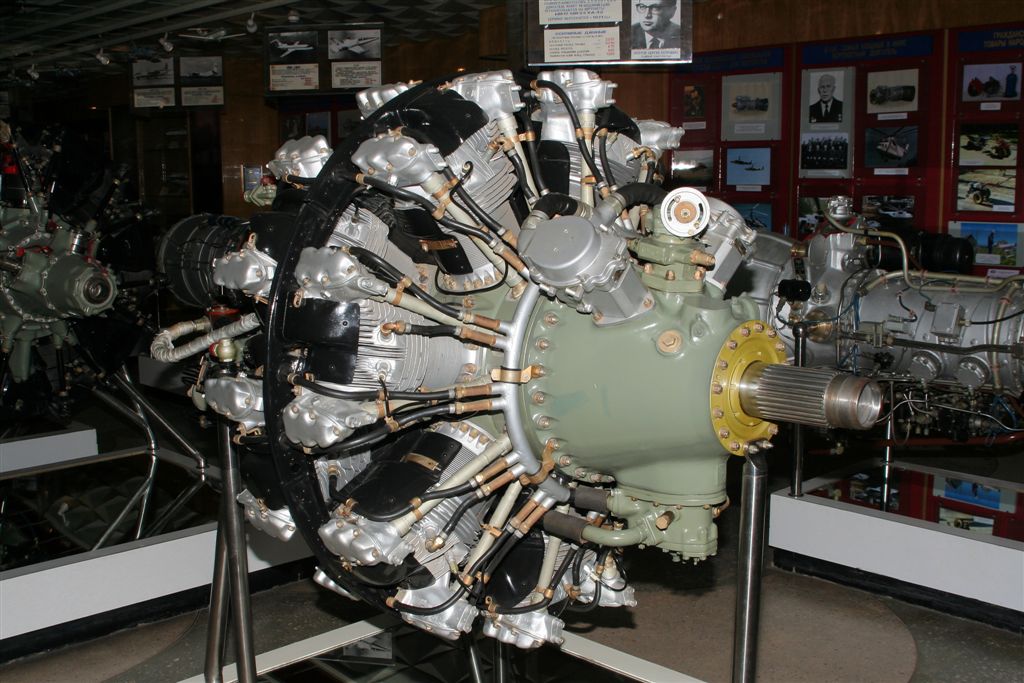 Всякий раз, когда вал двигателя
Всякий раз, когда вал двигателя
приводя вал в верхний шкив, ролики внутри муфты выталкиваются наружу
барабана и не допускайте, чтобы верхний шкив превышал скорость вращения вала двигателя. Это сцепление служит
агрегат свободного хода. т.е. всякий раз, когда вал двигателя начинает
вращаясь с меньшей скоростью, чем вал главного ротора (например, двигатель останавливается), ролики внутри
муфта перемещается внутрь и позволяет внешнему барабану вращаться со скоростью, превышающей скорость внутреннего
часть. Эта характеристика муфты кулисы могла позволить пилоту посадить вертолет.
безопасно, если двигатель заглох или просто перестал работать.
| Рисунок 2 |
Собирательный и циклический рычаги управления вертолетом. Эти двое
управлять движением системы автомата перекоса. См. рис. 2. Он состоит из двух пластин.
разделены шарикоподшипниками. Верхняя пластина свободно вращается. Нижняя пластина представляет собой
Верхняя пластина свободно вращается. Нижняя пластина представляет собой
пластина невращающаяся и может двигаться вертикально и наклоняться в любом направлении. Пилот может влиять
вертикальное положение плит перемещением общего рычага и наклоном через
циклический рычаг. Рычаг циклического управления может наклонять автоматы перекоса в любом направлении.
вращающаяся пластина имеет шаговые звенья, соединяющие ее с шаговыми рожками на лопасти. Это позволяет
вращающаяся пластина для изменения угла каждой лопасти. Регулируя коллективный контроль
рычагом, пилот может перемещать неподвижную пластину вверх и изменять угол атаки
лезвие. Если он увеличен (до угла срыва),
подъем вертолета.
| Рисунок 3 |
Следует отметить, что взаимодействие между вращающейся пластиной
над неподвижной пластиной создается крутящий момент, заставляющий вертолет вращаться в противоположную сторону
лезвия. На обычном вертолете здесь вступает в действие хвостовой винт. Хвост
На обычном вертолете здесь вступает в действие хвостовой винт. Хвост
ротор служит «противокрутящим ротором», который противодействует крутящему моменту, создаваемому
вращающаяся вращающаяся пластина и лопасти. См. рис. 3. Для поворота пилот либо увеличивает
угол атаки на лопасти хвостового винта для вращения в одну сторону или уменьшает его для вращения
другой путь.
[Мигель, следующее будет удалено, если не указано иное
просил, я не вижу, как это применимо к вышеизложенному]
Чтобы понять, как работает цикличность, понятие гироскопической прецессии
нужно понять. Чтобы упростить это, подумайте о вращении лезвия как о вращающемся диске.
Гироскопическая прецессия просто утверждает, что если у вас есть вращающееся тело, в данном случае диск,
и сила приложена параллельно его оси вращения, произойдет максимальный наклон диска
направление силы, 90 градусов после точки приложения силы. См. рис. 4.
В случае с вертолетом направление наклона автоматов перекоса будет определять его положение.
направление движения.
ДОМИНИРУЮЩАЯ ФИЗИКА:
См. рисунки
ОГРАНИЧИВАЮЩАЯ ФИЗИКА:
Нет Представлено
ДИАГРАММЫ/ГРАФЫ/ТАБЛИЦЫ:
Нет Представлено
ССЫЛКИ/ДОПОЛНИТЕЛЬНАЯ ИНФОРМАЦИЯ:
http://www.copters.com
http://rebeca.mit.edu/helicopters
Интервью: Кирилиан Дайер, студент бакалавриата Массачусетского технологического института, kyrilian@mit.edu
Принципы полета на вертолете В. Дж. Вагтендонка
Schweizer: Руководство для пилотов вертолетов, разработанное JEPPESEN Sanderson Training Products
Что делают пилоты вертолетов, когда у них выходит из строя двигатель
Многие люди, в том числе некоторые пилоты самолетов, приходят в ужас от одной мысли о неисправности двигателя вертолета. Они знают, что при отказе двигателя самолета можно приземлиться, переведя самолет в режим планирования. Но у вертолетов нет крыльев и, следовательно, они не планируют, поэтому они предполагают, что отказ двигателя вертолета всегда приводит к катастрофе со смертельным исходом. Я несколько раз слышал следующее или что-то в этом роде: «Вертолеты? Вы бы не застали меня ни в одном из них. Если двигатель заглохнет, значит, у вас это получилось — они просто падают с неба». В самом деле, если бы я получал по центу каждый раз, когда слышу это или что-то в этом роде, возможно, я не был бы богат, но, вероятно, смог бы позволить себе летать намного чаще.
Но у вертолетов нет крыльев и, следовательно, они не планируют, поэтому они предполагают, что отказ двигателя вертолета всегда приводит к катастрофе со смертельным исходом. Я несколько раз слышал следующее или что-то в этом роде: «Вертолеты? Вы бы не застали меня ни в одном из них. Если двигатель заглохнет, значит, у вас это получилось — они просто падают с неба». В самом деле, если бы я получал по центу каждый раз, когда слышу это или что-то в этом роде, возможно, я не был бы богат, но, вероятно, смог бы позволить себе летать намного чаще.
Миф — и это действительно миф — о том, что вертолеты падают как камень, если выходит из строя двигатель, довольно широко распространен и увековечен в книгах и фильмах. На самом деле, книга известного писателя-триллериста была испорчена для меня описанием вертолета, который потерял управление и врезался в деревья внизу после того, как отказал двигатель. Очень жаль — история была бы гораздо убедительнее и куда более захватывающей, если бы пилот совершил идеальную посадку с выключенным двигателем на крохотную полянку в лесу.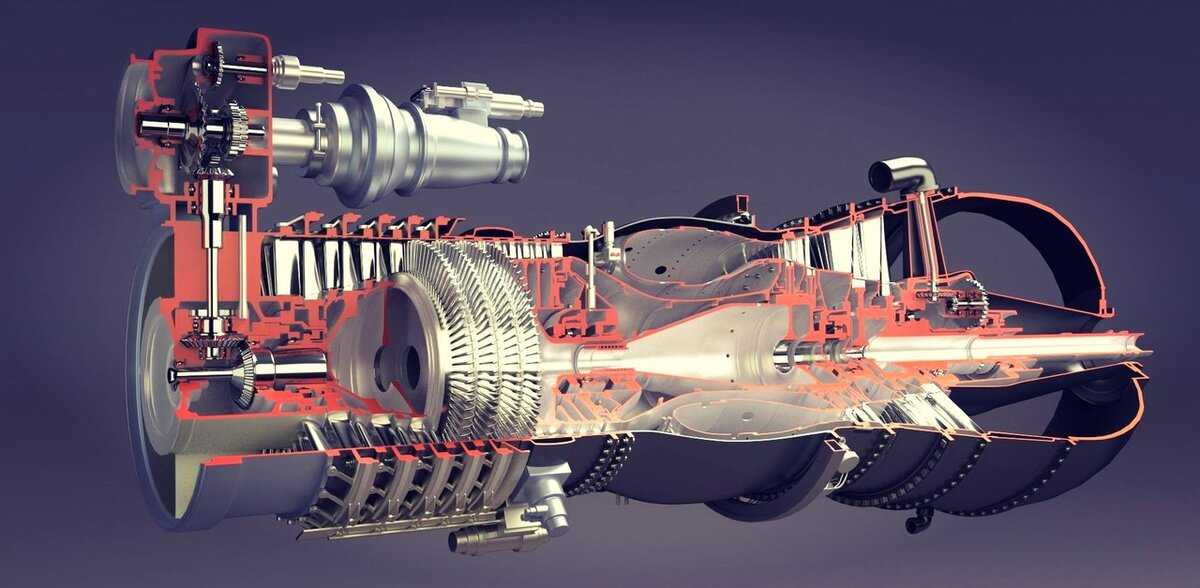 Ибо, в действительности, именно это он и сделал бы и, вероятно, сделал бы успешно.
Ибо, в действительности, именно это он и сделал бы и, вероятно, сделал бы успешно.
Так что же делать, если вы летите, а у вертолета отказал двигатель? Как можно выполнить посадку вертолета с выключенным двигателем или «авторотацию», как это обычно называют?
Что такое авторотация и как она выполняется?
В вертолете вращение роторов обеспечивает полет машины, поэтому то, что мы называем об/мин ротора (что означает число оборотов в минуту), имеет решающее значение. Теперь обычно двигатель вертолета поддерживает вращение роторов. Роторы похожи на вращающиеся крылья и создают подъемную силу, удерживающую вертолет в воздухе.
Если двигатель вертолета выйдет из строя и ничего не будет сделано, роторы остановятся. Так что нам нужно что-то еще, чтобы предотвратить падение оборотов ротора, и нам нужно это быстро. Пока мы сможем восстановить обороты несущего винта, вертолет будет летать — он не упадет с неба и не разобьется.
Итак, как только появляется хоть какое-то указание на снижение оборотов несущего винта – а обычно есть сигнальная лампа и гудок – вертолет переводят в крутой спуск, немедленно максимально опуская коллектив. Как только вертолет начинает снижаться, воздух снизу проходит через винты и заставляет их вращаться, что-то вроде ветряной мельницы или листа платана. Вертолет теперь установлен в том, что известно как ‘ авторотация’. Он будет снижаться довольно быстро, обычно со скоростью около 1700 футов в минуту. Но это будет сходить под контроль. Пилот может выбрать, куда лететь, решить ускориться или замедлиться, развернуться против ветра и выбрать безопасную площадку для посадки.
Как только вертолет начинает снижаться, воздух снизу проходит через винты и заставляет их вращаться, что-то вроде ветряной мельницы или листа платана. Вертолет теперь установлен в том, что известно как ‘ авторотация’. Он будет снижаться довольно быстро, обычно со скоростью около 1700 футов в минуту. Но это будет сходить под контроль. Пилот может выбрать, куда лететь, решить ускориться или замедлиться, развернуться против ветра и выбрать безопасную площадку для посадки.
На высоте около 40 футов пилот запускает плавную ракету, чтобы остановить скорость снижения. Затем вертолет выравнивают на высоте примерно от пяти до десяти футов, и в последний момент коллектив поднимают, чтобы смягчить приземление. Если это сделано правильно, вертолет мягко приземлится, возможно, с коротким разбегом при касании земли.
Это описание авторотации вертолета звучит довольно просто. На самом деле все не так уж и сложно. Вы не чувствуете, как будто вертолет падает с неба. Студенты, изучающие авторотацию, не заканчивают каждый урок шатаясь и выглядя немного зеленым. На самом деле, в школе, где я преподаю, я часто удивляю учеников пробного урока, заканчивая тренировочной авторотацией на аэродром, и не говорю им об этом до конца. Многие даже не осознают, что произошло что-то из ряда вон выходящее. Но, как и при посадке с выключенным двигателем в любом самолете – да и почти при любом летном маневре – авторотация требует практики, и есть ряд факторов, которые необходимо учитывать. Итак, давайте теперь посмотрим, как студенты учатся делать авторотации и что именно требуется для их успешного выполнения.
На самом деле, в школе, где я преподаю, я часто удивляю учеников пробного урока, заканчивая тренировочной авторотацией на аэродром, и не говорю им об этом до конца. Многие даже не осознают, что произошло что-то из ряда вон выходящее. Но, как и при посадке с выключенным двигателем в любом самолете – да и почти при любом летном маневре – авторотация требует практики, и есть ряд факторов, которые необходимо учитывать. Итак, давайте теперь посмотрим, как студенты учатся делать авторотации и что именно требуется для их успешного выполнения.
Быстрый спуск коллектива имеет решающее значение
Когда двигатель вертолета выходит из строя, самое главное — спустить коллектив и сделать это быстро. Число оборотов ротора абсолютно критично! Как только обороты упадут ниже определенного уровня, восстановить их будет невозможно, и вертолет действительно разобьется и сгорит.
Время, необходимое для спуска коллектива после отказа двигателя вертолета, зависит от типа вертолета. Большие вертолеты с более тяжелыми несущими системами имеют большую инерцию лопастей и дают вам значительно больше времени. Один пилот как-то сказал мне, что в Bell JetRanger можно сесть и сказать: «О боже, у нас отказал двигатель», а потом в неторопливом темпе спустить коллектив. Это немного преувеличение, но это правда, что есть несколько секунд на размышления. Но это не относится к меньшим и более легким вертолетам, таким как Robinson R22. В этих вертолетах коллектив нужно сразу спускать. Вероятно, именно этот факт привел к их незаслуженной репутации опасных, особенно для пилотов вертолетов с малым количеством часов работы.
Большие вертолеты с более тяжелыми несущими системами имеют большую инерцию лопастей и дают вам значительно больше времени. Один пилот как-то сказал мне, что в Bell JetRanger можно сесть и сказать: «О боже, у нас отказал двигатель», а потом в неторопливом темпе спустить коллектив. Это немного преувеличение, но это правда, что есть несколько секунд на размышления. Но это не относится к меньшим и более легким вертолетам, таким как Robinson R22. В этих вертолетах коллектив нужно сразу спускать. Вероятно, именно этот факт привел к их незаслуженной репутации опасных, особенно для пилотов вертолетов с малым количеством часов работы.
Другие способы увеличения числа оборотов ротора
Однако, при необходимости, существуют другие способы увеличения числа оборотов ротора. Увеличенная нагрузка на диск сделает это, и один из способов увеличить нагрузку на диск — развернуть самолет. Тесты показали, что в R22, если вы одновременно уменьшаете общее и поджигаете, у вас есть около семи секунд, чтобы среагировать, а не две секунды или меньше, которые иногда указывают, если вы просто уменьшаете общее. Конечно, это не так много времени, но попробуйте медленно сосчитать до семи… этого должно хватить. Помните, все, что вам нужно сделать, это понизить коллектив — все остальное может подождать.
Конечно, это не так много времени, но попробуйте медленно сосчитать до семи… этого должно хватить. Помните, все, что вам нужно сделать, это понизить коллектив — все остальное может подождать.
Итак, у вас отказал двигатель. Вы понизили колхоз и развели, чтобы вернуть обороты ротора. Вы сильно нажали на правую педаль, чтобы остановить внезапный рыскание влево — самый очевидный признак реального отказа двигателя. Что теперь?
Поиск места для посадки
Как и в любом другом самолете, при отказе двигателя вертолета необходимо искать место для посадки. Что за посадочная площадка? Что ж, на самом деле подойдет что угодно, если оно плоское и достаточно большое, чтобы выдержать полозья вертолета. Если вы находитесь над центром города, плоская крыша подойдет, хотя она не дает вам большого права на ошибку. Это основная причина, по которой я бы предпочел настоящий отказ двигателя вертолета, а не самолета — вам не нужно большое поле для посадки. Если бы он был доступен, я бы, конечно, использовал его, так как он дает больше права на ошибку, но это не обязательно.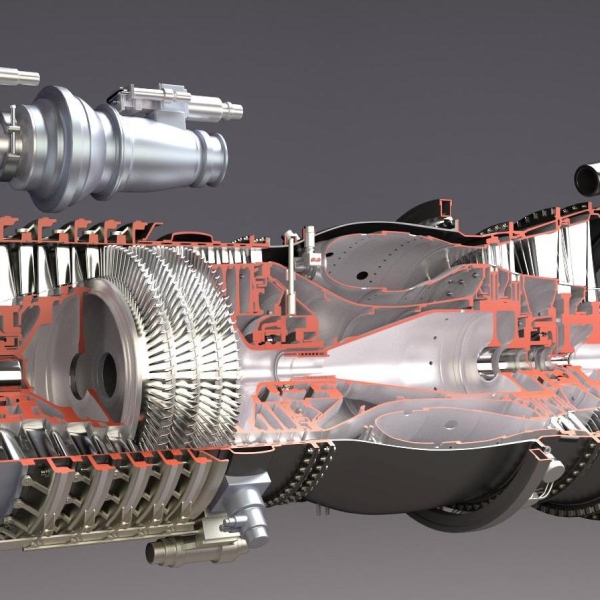 Было бы совершенно нормально что-нибудь поменьше — большой сад, полянка в лесу, игровое поле. Любой из них не представляет проблемы для вертолета, попавшего в беду.
Было бы совершенно нормально что-нибудь поменьше — большой сад, полянка в лесу, игровое поле. Любой из них не представляет проблемы для вертолета, попавшего в беду.
Подготовка к посадке
Итак, вы выбрали место для посадки вашего вертолета. Как и в случае с самолетом, вам нужно приземлиться против ветра, поэтому вам может понадобиться развернуться, что вполне возможно на авторотации. . Затем вам нужно позиционировать себя, чтобы действительно попасть на выбранную вами посадочную площадку.
Как и в случае с самолетом, у которого отказал двигатель, довольно легко потерять высоту, но трудно растянуть «глиссирование». Это можно сделать, слегка подняв колхоз и увеличив скорость. Тем не менее, этот маневр требует смелости и точности, и вы не покроете слишком большую территорию, поэтому предпочтительнее выбрать место для посадки, возможно, слишком близкое. Затем вы можете делать S-образные повороты, чтобы сбросить высоту, если хотите, хотя лично я предпочитаю регулировать скорость.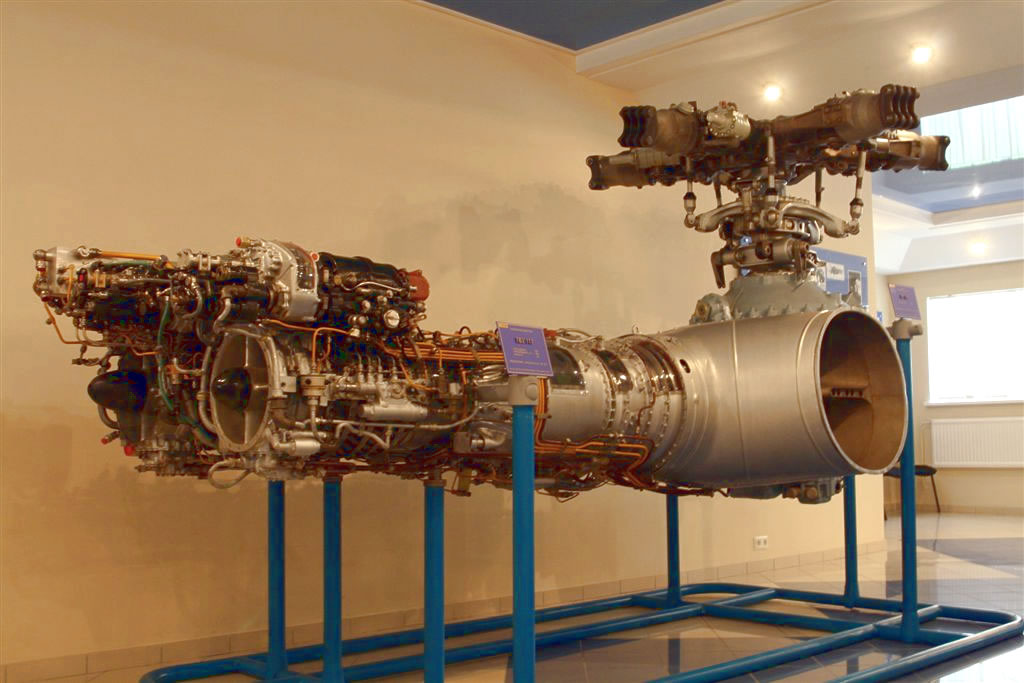 Вертолеты не глохнут на малой скорости полета, поэтому вы можете притормозить — даже почти до нулевой скорости, если это необходимо. Если вы сделаете это, скорость снижения будет увеличиваться почти до нуля! Вы будете спускаться почти вертикально — фактически, при любом встречном ветре вы пойдете назад. Но это один из способов попасть на сайт, который находится прямо под вами, если он единственный доступный, и, на мой взгляд, это гораздо более простой и безопасный метод, чем начать поворачивать и, возможно, потерять свой сайт в процессе.
Вертолеты не глохнут на малой скорости полета, поэтому вы можете притормозить — даже почти до нулевой скорости, если это необходимо. Если вы сделаете это, скорость снижения будет увеличиваться почти до нуля! Вы будете спускаться почти вертикально — фактически, при любом встречном ветре вы пойдете назад. Но это один из способов попасть на сайт, который находится прямо под вами, если он единственный доступный, и, на мой взгляд, это гораздо более простой и безопасный метод, чем начать поворачивать и, возможно, потерять свой сайт в процессе.
Если до фактической посадки есть время, вы должны объявить Первомай и проинформировать своих пассажиров. Но вы спускаетесь довольно быстро, так что на самом деле не будет всего времени в мире, если не сказать больше. Ваш Первомайский призыв, вероятно, будет несколько сокращен, и все причудливые попытки перезапуска лучше забыть… если только вы не стартовали с высоты около 10 000 футов.
Посадка с выключенным двигателем
Если вы снизили скорость вертолета, чтобы добраться до места, вам необходимо убедиться, что вы снова набираете скорость полета, так как перед посадкой вам нужно достичь скорости около шестидесяти пяти узлов. , желательно на высоте 300 футов над землей. В этот момент вы нацеливаетесь на середину выбранного вами места, и примерно в сорока футах вы начинаете мягкую ракету, выравниваете вертолет и поднимаете коллектив, когда достигаете земли, чтобы смягчить фактическую посадку. И, надеюсь, вы уйдете, не повредив ни вертолет, ни пилота, ни пассажиров
, желательно на высоте 300 футов над землей. В этот момент вы нацеливаетесь на середину выбранного вами места, и примерно в сорока футах вы начинаете мягкую ракету, выравниваете вертолет и поднимаете коллектив, когда достигаете земли, чтобы смягчить фактическую посадку. И, надеюсь, вы уйдете, не повредив ни вертолет, ни пилота, ни пассажиров
Самая трудная часть всего упражнения на авторотации — это подъем и приземление. Величина, которую вам нужно поджечь, зависит от ветра, и каждая авторотация немного отличается. Чтобы сделать это правильно, требуется недавняя практика, а это есть не у всех пилотов. Тем не менее, пока вы спускаете коллектив, совершаете контролируемый заход на ровную площадку и приземляетесь вертикально, ваша посадка должна быть выживающей. Вертолеты спроектированы таким образом, чтобы приземляться на полозья и при этом выдерживать довольно большую силу. Полозья и сиденья складываются в случае жесткой посадки, защищая пассажиров. Это одна из причин не класть ничего твердого или острого под сиденья в вертолетах, где это единственное место для хранения, особенно запасные органы управления или масленки! На них очень не хочется садиться в случае неидеальной вынужденной посадки! Но если говорить по делу, пока вы приземляетесь вертикально, вы должны быть в состоянии уйти… и вертолеты можно заменить.
Отказ двигателя при зависании
Отказ двигателя также возможен при зависании или рулении на висении. В этой ситуации последнее, что вы хотели бы сделать, это опустить коллектив, так как вы просто погрузитесь в землю. Вместо этого пилот удерживает самолет на одном уровне, а затем в последний момент осторожно поднимает колхоз. С полутораметрового висения его вообще почти не нужно поднимать, а просто удерживать позицию. Это одна из причин, по которой вертолеты редко парят выше этой отметки.
И несколько заключительных слов…
Отказы вертолетных двигателей, к счастью, очень редки. Однако разумный пилот всегда летает осторожно, помня о возможности. Меня учили никогда не летать на малой высоте над большим участком леса, если есть возможность его обогнуть. И хотя полет на высоте 500 футов может быть забавным, он не дает вам много времени в чрезвычайной ситуации.
Обычный профиль взлета вертолета позволяет пилоту безопасно приземлиться в любой момент в случае отказа двигателя. Каждый тип вертолета имеет диаграмму высота-скорость, также известную как «кривая уклонения» или, более графически, как «кривая мертвеца». На этом графике показана зависимость воздушной скорости от высоты и области, из которых было бы крайне сложно выполнить успешную посадку с выключенным двигателем. В основном небезопасными являются те области, в которых вертолет летит высоко, но медленно, или очень низко и очень быстро. Вот почему, если это вообще возможно, вертолеты будут набирать скорость близко к земле, а затем подниматься, когда у них будет достаточно скорости полета. Вертикальные или высокие взлеты выглядят хорошо и доставляют удовольствие, но их следует использовать только в случае крайней необходимости — когда есть выбор между уклонением от кривой или, возможно, нахождением на деревьях или других препятствиях.
Каждый тип вертолета имеет диаграмму высота-скорость, также известную как «кривая уклонения» или, более графически, как «кривая мертвеца». На этом графике показана зависимость воздушной скорости от высоты и области, из которых было бы крайне сложно выполнить успешную посадку с выключенным двигателем. В основном небезопасными являются те области, в которых вертолет летит высоко, но медленно, или очень низко и очень быстро. Вот почему, если это вообще возможно, вертолеты будут набирать скорость близко к земле, а затем подниматься, когда у них будет достаточно скорости полета. Вертикальные или высокие взлеты выглядят хорошо и доставляют удовольствие, но их следует использовать только в случае крайней необходимости — когда есть выбор между уклонением от кривой или, возможно, нахождением на деревьях или других препятствиях.
Если вы достаточно опытный пилот вертолета, практика авторотации доставляет большое удовольствие. Я помню, как инструктор сказал мне, что с удовольствием будет заниматься ими весь день, и я сам только начинаю так себя чувствовать.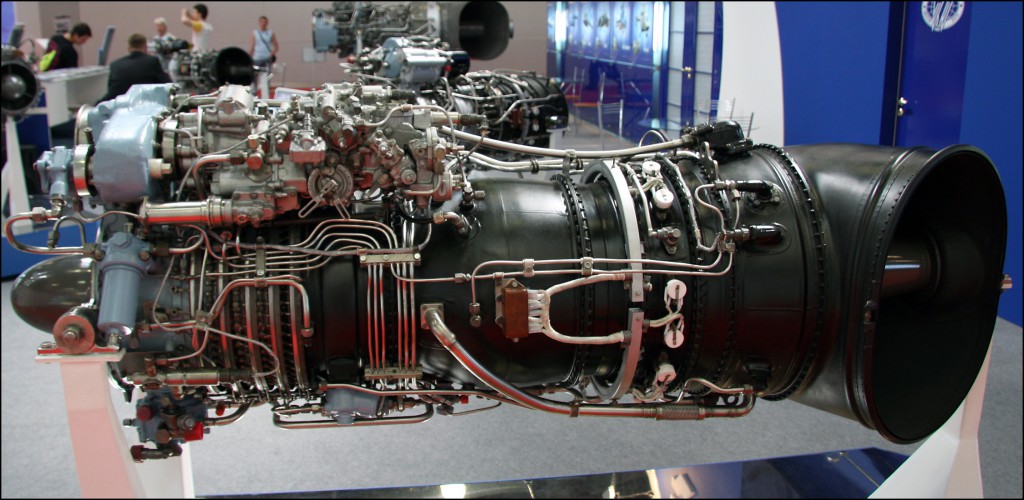 К счастью, у меня еще никогда не было настоящего отказа двигателя, но если я буду летать достаточно долго, велика вероятность, что когда-нибудь это произойдет. Если и когда это произойдет, вся практика, надеюсь, сослужит мне хорошую службу — и я не только уйду, но и смогу снова использовать вертолет после этого!
К счастью, у меня еще никогда не было настоящего отказа двигателя, но если я буду летать достаточно долго, велика вероятность, что когда-нибудь это произойдет. Если и когда это произойдет, вся практика, надеюсь, сослужит мне хорошую службу — и я не только уйду, но и смогу снова использовать вертолет после этого!
Вертолетный турбинный двигатель: введение в эти двигатели для вертолетов
Учебник по двигателям этих вертолетов
Шон Койл
Ниже приводится краткий отрывок из книги «Цикличность и коллективность».
Шон Койл. Он взят из главы, посвященной газотурбинным двигателям на вертолетах.
Турбинные двигатели разные!
Турбинные двигатели во многом отличаются от поршневых двигателей, некоторые очевидны, другие не столь очевидны. Турбинные двигатели бывают:
- Более плавный, с менее заметной вибрацией
- Тише (или, по крайней мере, другой шум и уж точно меньше шума выхлопа)
- Меньший вес при той же мощности (т. е. лучшее соотношение мощность/вес)
- Более надежный (обычно)
- Капитальный ремонт с большей периодичностью (часы)
- Легче заводится на морозе
- Требуется меньше обслуживания между капитальными ремонтами
- Потребляйте меньше моторного масла
С другой стороны, газотурбинные двигатели также бывают:
- Более дорогое приобретение и капитальный ремонт
- Жаждущие (потребляют больше топлива)
- Менее терпимы к злоупотреблениям
- Больше удивляет, когда они терпят неудачу (будучи тише, они меньше предупреждают о неудаче)
Типовой двигатель со свободной турбиной
Типичный газотурбинный двигатель вертолетов показан на рис. 1. Обратите внимание, что на схеме показаны номера. Они относятся к различным «областям» в двигателе и являются международным соглашением по нумерации. Например, «0» относится к атмосферным условиям перед подачей воздуха в двигатель (и после его выхода), «1» — перед компрессором и так далее. Таким образом, если бы мы измеряли температуру или давление в конце компрессора, это были бы T3 или P3 соответственно.
В газотурбинном двигателе система зажигания обычно не включена постоянно. Некоторые машины требуют включения зажигания во время захода на посадку и приземления, чтобы двигатель не работал в случае его возгорания.
В свободнотурбинном двигателе нет непосредственной механической связи между силовой турбиной и турбиной компрессора, то есть нет набора соединяющих их шестерен, только газовый тракт.
Термины, относящиеся к газотурбинным двигателям
Многие из терминов, используемых в газотурбинных двигателях, не имеют общепринятого отраслевого стандарта, что приводит к путанице даже с упоминаемыми международными стандартами.
до. Типичным примером этого является TOT, TIT, ITT, T4, T5, даже T4.5 — все они представляют собой температуру выхлопных газов где-то в двигателе. Причиной разных названий являются разные места, где измеряется температура. Для единообразия здесь будут использоваться сокращения:
N1: Скорость компрессора
N2: Скорость турбины
TOT: температура на выходе из турбины
Q: крутящий момент
Большинство скоростей двигателя и несущего винта выражаются в процентах об/мин, чтобы упростить жизнь пилота. (Просто подумайте о проблеме, если бы пределы не были в процентах. Ограничения скорости компрессора могли бы быть 25 675 об/мин для непрерывной работы и 27 450 для взлета. С процентными значениями вам нужно запомнить не более трех цифр.)
Небольшое замечание о терминах N2 и NR. Их часто путают, особенно когда речь идет о губернаторах. Поскольку они механически связаны, они обычно считаются эквивалентными. Только когда вертолет находится на авторотации, или в странной ситуации для двухдвигательных вертолетов они не связаны механически (в этих случаях NR будет выше, чем N2).
Это также хороший момент, чтобы упомянуть, что невозможно сравнить температуру или пределы оборотов между двигателями. Температуры могут быть измерены в разных точках двигателей.
Разница между номиналами и ограничениями
Номинал — это мощность, которую двигатель будет развивать при работе на предельной скорости в стандартных дневных условиях ISA. Ограничения — это предписанные пределы, установленные производителем для обеспечения непрерывной работы и увеличения срока службы.
Иногда появляется ограничение крутящего момента, которое (по совпадению) равно номинальной мощности двигателя. Большинство ограничений разработаны с учетом нормального использования и допускают ошибку в целях безопасности, при этом предусмотрены некоторые меры для непреднамеренного выхода за пределы этого уровня. Насколько велик этот запас, останется в секрете, поэтому лучше не превышать нормальные пределы, так как вы не хотите узнать, что вы вышли за пределы того, что производитель заложил для нерадивых пилотов!
Как долго действует каждый лимит?
Не раз слышал, что если есть ограничение по времени на рейтинг двигателя, то если рейтинг был использован за это время, эквивалент
время должно быть потрачено ниже лимита. Например, если существует 30-минутный предел TOT, и двигатель работал до этого предела TOT в течение 30 минут, то, по мнению некоторых, предполагается, что двигатель должен находиться за пределами этого ограничения по времени в течение 30 минут, прежде чем его можно использовать снова.
Это нонсенс по следующим причинам. Во-первых, если это то, что имелось в виду, то это точно не прописано ни в одном руководстве по планированию, двигателю или сертификационному руководству, которое я когда-либо видел. Если это подразумевается, это должно быть прописано. Во-вторых, и это самое главное, я связался с несколькими производителями двигателей и планеров, и все они говорят, что это не так.
Еще один ложный взгляд на это состоит в том, чтобы думать, что если что-то повреждено перенапряжением, то его можно привести в норму с помощью недонапряжения — это не работает.
Циклы
Проблемой газотурбинных двигателей являются тепловые нагрузки и удары. Нетрудно понять, что взять кусок металла из холодного покоя и внезапно нагреть его до 700 С при вращении на высоких скоростях довольно тяжело для металла. Делайте это достаточное количество раз, и полученные повреждения накапливаются и металл выходит из строя. По этой причине большинство газотурбинных двигателей считают циклы — количество раз, когда двигатель запускался и работал на взлетной мощности. Меняйте температуру и обороты быстро или много, и циклы тоже складываются. Вот почему большинство больших реактивных двигателей имеют такой долгий срок службы — крейсерский полет на большой высоте в течение длительного времени, у них мало циклов и много времени на одном уровне мощности. Вертолетные двигатели, к сожалению, имеют много изменений мощности (читай изменения оборотов и температуры) и, следовательно, относительно короткий (но славный) срок службы.
Счетчики циклов могут варьироваться от глупых вещей, которые подсчитывают только количество нажатий кнопки пуска, до устройств, которые отслеживают количество раз, когда TOT превышает определенные значения, в то время как N1 выше определенного RPM, или количество раз, когда коллектив повышен, когда давление масла в трансмиссии выше определенного значения. Обратите внимание на циклы, если они у вас есть. Они расскажут историю жестокого обращения или нежной любовной заботы о двигателе.
Измерение температуры
Нелегко точно измерить температуру глубоко внутри ада
двигателя, и какими бы точными ни были показания из кабины, на самом деле они лишь приблизительны. Указанная температура на самом деле является только предположением о том, что происходит с металлом, и именно по этой причине существуют переходные пределы температуры, особенно для запуска. Настоящая проблема заключается в том, что металл не может выдерживать высокие температуры в течение длительного времени, а короткий период, допустимый для высокой температуры при запуске (или иногда во время работы), означает, что эта высокая температура не будет существовать достаточно долго, чтобы воздействовать на лопатки турбины. .
Высота по плотности по сравнению с высотой по давлению и OAT
Одним из основных различий между поршневыми и газотурбинными двигателями является влияние атмосферных условий на доступную мощность. Проще говоря, мощность, доступная от поршневого двигателя, зависит от высоты по плотности, тогда как мощность, доступная от газотурбинного двигателя, зависит от высоты по давлению и температуры.
Смущенный? Я слышу вопросы отсюда. Да, высота по давлению и температура воздуха составляют высоту по плотности, но высота по плотности может быть получена из самых разных высот по давлению и температур.
Примером может служить высота плотности 5000 футов. Это может быть барометрическая высота 9000 футов при -40°C, или 1800 футов барометрическая высота при 40°C, или 5000 футов барометрическая высота при 5°C. Однако барометрическая высота 9000 футов и -40°C всегда будут 5000 футов. высота по плотности (по крайней мере, достаточно близко для целей демонстрации).
Большинство пилотов вертолетов, работающих в одном и том же месте, видят только влияние температуры воздуха, поскольку изменения настроек высотомера не будут иметь большого значения для барометрической высоты (по крайней мере, в отношении мощности двигателя). Они знают, что в более жаркие дни у них меньше мощности, или что TOT выше в жаркий день, чем в холодный день при том же используемом крутящем моменте. Естественная тенденция состоит в том, чтобы винить в изменении плотности высоту.
Неправильно говорить, что мощность, доступная для газотурбинного двигателя, зависит от высоты по плотности.
Это был краткий отрывок из книги Cyclic & Collective , в которой обсуждаются газотурбинные двигатели вертолетов. Cyclic & Collective — ресурс по вертолетным системам. Это интересное чтение как для механиков, так и для пилотов, особенно для тех, кто не знаком с вертолетами, чтобы лучше понять эти самолеты. Для получения дополнительной информации вы можете посетить сайт www.helobooks.com.
Вертолетная трансмиссия
Система трансмиссии передает мощность от двигателя на несущий винт, рулевой винт и другие вспомогательные устройства в нормальных условиях полета. Основными компонентами системы трансмиссии являются трансмиссия несущего винта, система привода хвостового винта, сцепление и блок свободного хода. Блок свободного хода, или муфта авторотации, позволяет трансмиссии несущего винта приводить в движение приводной вал хвостового винта во время авторотации. Вертолетные трансмиссии обычно смазываются и охлаждаются собственным маслом. Для контроля уровня масла предусмотрен смотровой манометр. Некоторые трансмиссии имеют детекторы стружки, расположенные в поддоне картера. Эти датчики подключены к сигнальным лампам, расположенным на приборной панели пилота, которые загораются в случае внутренней проблемы. Детекторы стружки на современных вертолетах имеют функцию «сжигания» и пытаются исправить ситуацию без участия пилота. Если проблема не может быть устранена самостоятельно, пилот должен обратиться к аварийным процедурам для данного конкретного вертолета.
Трансмиссия несущего винта
Основная цель трансмиссии несущего винта — снизить выходную мощность двигателя до оптимальной скорости вращения ротора. Это уменьшение отличается для разных вертолетов. В качестве примера предположим, что обороты двигателя конкретного вертолета составляют 2700 об/мин. Скорость вращения ротора 450 об/мин потребует уменьшения 6:1. Сокращение 9:1 означало бы, что ротор будет вращаться со скоростью 300 об/мин. В большинстве вертолетов используется тахометр с двойной стрелкой или прибор с вертикальной шкалой, показывающий обороты двигателя и несущего винта или процент оборотов двигателя и несущего винта. Индикатор оборотов ротора обычно используется только при включении сцепления для контроля ускорения ротора и при авторотации для поддержания оборотов в заданных пределах. [Рисунок 1]
Рисунок 1. Существуют различные типы тахометров с двумя стрелками; однако, когда иглы наложены друг на друга или соединены, соотношение оборотов двигателя такое же, как и передаточное число редуктора вращения от горизонтальной оси двигателя до вертикальной оси вала ротора. [Рисунок 2]
МуфтаВ обычном самолете двигатель и воздушный винт постоянно соединены. Однако в вертолете соотношение между двигателем и несущим винтом другое. Из-за большего веса несущего винта по отношению к мощности двигателя по сравнению с весом воздушного винта и мощностью самолета ротор должен быть отсоединен от двигателя при включении стартера. Сцепление позволяет запустить двигатель, а затем постепенно снять нагрузку с ротора. В двигателях со свободной турбиной сцепление не требуется, поскольку турбина газогенератора по существу отсоединена от силовой турбины. Когда двигатель запускается, силовая турбина оказывает небольшое сопротивление. На поршневых вертолетах используются два основных типа муфт: центробежная муфта и муфта ременной передачи. Центробежная муфта Центробежная муфта состоит из внутреннего узла и внешнего барабана. Внутренний узел, соединенный с приводным валом двигателя, состоит из колодок, облицованных материалом, подобным автомобильным тормозным колодкам. На низких оборотах двигателя пружины удерживают колодки, поэтому нет контакта с внешним барабаном, который крепится к первичному валу трансмиссии. По мере увеличения оборотов двигателя центробежная сила заставляет колодки сцепления двигаться наружу и начинают скользить по внешнему барабану. Муфта ременной передачи Некоторые вертолеты используют ременную передачу для передачи мощности от двигателя к трансмиссии. Ременная передача состоит из нижнего шкива, прикрепленного к двигателю, верхнего шкива, прикрепленного к входному валу трансмиссии, ремня или набора клиновых ремней и некоторых средств натяжения ремней. Ремни свободно надеваются на верхний и нижний шкивы, когда ремни не натянуты. Это позволяет запускать двигатель без какой-либо нагрузки со стороны трансмиссии. Блок свободного хода Поскольку подъемная сила в вертолете обеспечивается вращающимися аэродинамическими профилями, эти аэродинамические поверхности должны свободно вращаться в случае отказа двигателя. Блок свободного хода автоматически отключает двигатель от несущего винта, когда обороты двигателя меньше оборотов несущего винта. Это позволяет основному винту и хвостовому винту продолжать вращаться с нормальной скоростью в полете. Наиболее распространенный узел свободного хода состоит из обгонной муфты свободного хода, расположенной между двигателем и трансмиссией несущего винта. Обычно это верхний шкив поршневого вертолета или установленный на редукторе вспомогательного оборудования вертолета с турбиной. RELATED POSTS
Армия завершает предварительные испытания вертолетного двигателя нового поколения Дженерал Электрик Т901 двигатель проходит испытания. Дженерал Электрик Что нужно знать об оборонной промышленности — в почту. Маркус Вайсгербер Глобальный бизнес-редактор
Армия США завершила ранний раунд испытаний нового двигателя производства General Electric, который, как ожидается, будет использоваться для будущих вертолетов и улучшит дальность полета и характеристики самолетов Black Hawk и Apache. Хотя пройдет еще несколько месяцев, прежде чем двигатель, названный T901, поднимет самолет над землей, завершение критических испытаний в прошлом месяце открывает путь для компаний, разрабатывающих вертолеты нового поколения, к получению двигателей для уже строящихся прототипов. Bell соревнуется с Sikorsky в создании штурмовика-разведчика будущего. За три месяца испытаний, которые были отложены из-за пандемии, T901 проработал более 100 часов, сообщили в армии. «В ходе мероприятия были успешно проверены и проверены рабочие характеристики армейского винтокрылого двигателя следующего поколения, который будет установлен на Boeing AH-64 Apache, Sikorsky UH-60 Black Hawk и штурмовике Future Attack Reconnaissance Aircraft», — говорится в сообщении армии. заявление по электронной почте. Двигатель пройдет «многолетнюю испытательную кампанию», прежде чем он достигнет «полной армейской квалификации». Тем не менее, прототипы вертолетов, которые сейчас строятся, как ожидается, будут летать с новыми двигателями уже в 2023 году. «Эти стандарты гарантируют, что двигатель соответствует армейским требованиям в отношении конструкции, производства и поддержания летной годности, и будут охватывать около 1500 часов испытаний двигателя», — заявили в армии. «В общей сложности T901 пройдет около 5000 часов испытаний, чтобы получить полную квалификацию двигателя». Новые, более мощные, надежные и экономичные двигатели разрабатывались более десяти лет. В 2019 году армия предпочла двигатель GE T901 силовым установкам Pratt & Whitney и Honeywell.. В дополнение к новому штурмовику Future Attack Reconnaissance Aircraft, этот двигатель в конечном итоге будет установлен на вертолетах Black Hawks и Apache, которые останутся на вооружении армии на долгие годы. Согласно бюджетным документам армии, новый Black Hawk с двигателем T901 не будет летать до 2027 года. Поделись этим: СЛЕДУЮЩИЙ ЭТАЖ: Краткий обзор оборонного бизнеса: что ждет Aerojet в будущем; сделки по оружию на саммите НАТО; Бонус при приеме на работу от Raytheon в размере 50 000 долларов; и более. ЦЕНТКОМ получил новую миссию. Ему нужна дополнительная поддержка. Познакомьтесь со средним уровнем удивительного… Э-э, приобретение Оборонные подрядчики, обновите свою политику в области психического здоровья Иран и США вряд ли достигнут новой ядерной сделки 10 школьных вопросов авторам открытого письма «Принципы» ЦЕНТКОМ получил новую миссию. Ему нужна дополнительная поддержка. Познакомьтесь со средним уровнем удивительного… Э-э, приобретение Оборонные подрядчики, обновите свою политику в области психического здоровья Иран и США вряд ли достигнут новой ядерной сделки 10 школьных вопросов авторам открытого письма «Принципы» X Этот веб-сайт использует файлы cookie для улучшения взаимодействия с пользователем, а также для анализа производительности и Принять файлы cookie X Настройки файлов cookie Не продавать мою личную информацию Когда вы посещаете наш веб-сайт, мы сохраняем файлы cookie в вашем браузере для сбора Разрешить все файлы cookie Управление настройками согласия Строго необходимые файлы cookie — всегда активны Мы не разрешаем вам отказаться от определенных файлов cookie, поскольку они необходимы для Продажа персональных данных, файлов cookie для таргетинга и социальных сетей В соответствии с Законом штата Калифорния о конфиденциальности потребителей вы имеете право отказаться от Если вы включили элементы управления конфиденциальностью в своем браузере (например, плагин), у нас есть Целевые файлы cookie могут быть установлены через наш сайт нашими рекламными партнерами. Они Файлы cookie социальных сетей устанавливаются рядом наших сервисов социальных сетей. Если вы хотите отказаться от всех наших отчетов и списков лидов, отправьте Сохранить настройки Настройки файлов cookie Список файлов cookie Файл cookie — это небольшой фрагмент данных (текстовый файл), который веб-сайт — при посещении пользователем. Строго необходимые файлы cookie Мы не разрешаем вам отказаться от определенных файлов cookie, поскольку они необходимы для Функциональные файлы cookie Мы не разрешаем вам отказаться от определенных файлов cookie, поскольку они необходимы для Производительные файлы cookie Мы не разрешаем вам отказаться от определенных файлов cookie, поскольку они необходимы для Продажа персональных данных Мы также используем файлы cookie для персонализации вашего опыта на наших веб-сайтах, в том числе с помощью Файлы cookie социальных сетей Мы также используем файлы cookie, чтобы персонализировать ваш опыт на наших веб-сайтах, в том числе с помощью Целевые файлы cookie Мы также используем файлы cookie, чтобы персонализировать ваш опыт на наших веб-сайтах, в том числе с помощью |