Содержание
Компоненты электровелосипеда: мотор / Хабр
Приветствую снова!
Поскольку предыдущее моё малое эссе было воспринято в целом позитивно, хочу поделиться некоторыми накопленными в процессе чтения форумов, знаниями, касательно электровелосипедов.
В сией статье хочу поделится тем, какие виды приводов используются в электровело, их плюсы, минусы, и особенности.
Надеюсь, это кому то покажется интересным. Обозревать буду только трехфазные двигатели постоянного тока — ибо остальные не исследовал, да и относительно редки эти остальные
в наше время.
Итак, начнём:
По большому счёту приводные элементы электровелосипедов можно рассортировать в 3 вида:
- Каретный электродвигатель, электродвигатель с центральным расположением.
- Редукторное мотор-колесо (geared hub motor).
- Моторколесо с прямым приводом (директ-драйв).
Начнём с номера первого: мид-драйв, центральный.
Оно, кстати, довольно популярно в брендовых всяких европейских электровелосипедах.
Находится вблизи каретки (педалей) велосипеда, через цепной привод, и механизм передачь,
если на велосипеде такой есть, вращает заднее колесо.
Плюсы: если велосипед с передачами — широкий диапазон оптимального применения за счёт этих самых передачь — можно и хорошую тягу на малых оборотах получить, и высокую скорость.
Минусы: цепь и звёзды становятся расходником, если по пути порвёте цепь, или погнёте петух, или ещё как-то сломаете цепную передачу — домой будете возвращатся пешком толкая свой транспорт.
Алсо невозможен полнопривод с использованием одного мотора.
Номер второй: Редукторник, geared
Электродвигатель расположен внутри ступицы колеса, там же расположена зубчатая понижающая планетарная передача, которая даёт электродвигателю вращаться с большими оборотами, чем обод колеса.
Шестерёнки обычно из пластмассы.
Есть механизм передающий момент в системе колесо-мотор только в одном направлении — при тяге от двигателя (фривил, обгонная муфта).
В случае, когда передача идёт в обратном направлении, происходит разьеденение системы, таким образом при накате, либо движении от педалей, электромотор не вращается, и тем самым не затрудняет вращение колеса.
Тут слева — директдрайв, справа — редукторник:
редукторный мотор:
Плюсы: Лучшее кпд в широком диапазоне скоростей относительно директдрайва, лучшая тяга на малых скоростях и старте, меньший расход энергии на километр пробега, меньшие размеры и вес, отсутсвие сопротивления движению при езде от педалей.
Минусы: отсутствие возможности использовать рекуперацию, слабое место в виде пластиковых шестеренок, при срезании зубьев каковой, либо порче обгонной муфты в пути, добираться придётся педалируя.
Номер третий: директдрайв
Самая, вроде, надёжная система за счёт минимизации лишних деталей — чистый электродвигатель, ротор сидит на оси и неподвижен относительно вилки, статор вращается вместе с колесом.
Плюсы: минимум лишних деталей, возможна рекуперация, легкое достижение высоких скоростей.
Минусы: относительно большой диаметр и вес, низкое кпд при малых скоростях.
Теперь про общие вопросы, связанные, в основном таки с моторколёсами, ибо миддрайв меня не интересует, так что я по нему не очень интересовался.
Итак, в целом — редукторное моторколесо более тяговитое и более экономичное.
Директдрайв — более скоростной, так что если хочется ездить на скоростях 40 — 50+, то скорее стоит присматриваться к директдрайвам.
Также у директдрайва посредством контроллера можно реализовать режим рекуперации — перевод электродвигателя в режим генератора с запасанием выработанной энергии обратно в аккумуляторную батарею.
Эффект от подзарядки аккумулятора рекуперацией достаточно мизерный — порядка увеличения на 2-3 процента пробега, плюс ещё там есть ньюансы в виде больших токов зарядки, и того, что заряжать литиумный акб при температурах ниже +5 цельсия — это убивать его (относится и к мобилам и прочим бытовым девайсам на литий-ионе и литий -полимере, кстати), но зато его можно использовать в качестве тормоза, и таким образом экономить тормозные колодки.
Кстати, в «большом электротранспорте», в виде, к примеру, электропоездов ЭР2Т, рекуперативное торможение точно так и используется — до скорости порядка 25 кмч поезд тормозит чисто введением тяговых электродвигателей в режим генераторов, отдавая выработанную электроэнергию обратно в контактную сеть.
Для экономичного вождения много полезнее минимально пользоватся торможением, и максимально — накатом — то есть видя красный сигнал светофора, к примеру, не переть прямо до него на газу, а метров за 300 закрыть газ, и накатом двигатся, чтобы к приезду к светофору иметь скорость не более 10-15 кмч.
Что ещё: скорость езды.
Один из наиболее частых вопросов новичков — как быстро мой велосипед будет ехать на электроприводе?
Это прямо зависит от четырёх вещей:
1. Обороты холостого хода мотор-колеса при номинальном напряжении:
Нормальный продаван их либо указывает, либо их можно из него выбить.
У моего моторколеса, к примеру, это 310 RPM при 48V. При замере китайским тахометром,
оказалось 305 оборот в минуту при питании от 4 последовательно соединённых свинцовых акб по 12 вольт (примерно 50 вольт фактически) на вывешенном колесе — приемлемо.
Не забывайте, что это обороты мотор-колеса без нагрузки, это важно!
2. Диаметр обода колеса. Понятно, что чем больше окружность колеса, тем больше будет фактическая скорость при равных оборотах.
Формула для расчёта: окружность колеса в миллиметрах / 1000 * (обороты мотор-колеса /60) = скорость в метрах в секунду. Для километров в час умножить на 3.6, для получения финальной прогнозируемой скорости — всё это ещё поделить на 1.2, ибо обороты под, даже вполне посильной нагрузкой, будут ниже, чем без нагрузки (приблизительно на 20 процент, да).
3. Соответствие мощности к сопротивлению движению.
Если у вас расчётная скорость получилась 50 кмч, для достижения и поддержания таковой скорости мотор должен будет развивать мощность порядка киловатта, или 1000 ватт.
Если ваш мотор будет развивать мощность в 500 ватт, то из за сопротивления вращению он не сможет достичь своих максимальных оборотов, понятно, и вы будете довольствоватся максимальной скоростью в 37 кмч вместо 50 — при этом мотор ещё будет довольно сильно греться из за перегрузки, если вы на такой скорости будете ездить на до конца выкрученной ручке газа.
4. Напряжение питания.
При покупке моторколеса, к нему указывается номинальное напряжение питания — к примеру, 48 вольт.
Но напрямую такие двигатели никто не питает — они управляются контроллером, который получает от аккумуляторной батареи однофазное постоянное напряжение, и преобразует его в трехфазное «вращающееся», для питания мотор-колеса.
Так вот, не обязательно питать моторколесо контроллером и батареей на указанное напряжение.
Вы можете питать 48-вольтовый мотор батареей и контроллером на 36 вольт.
Или на 24, или на 60 вольт — при этом скорость вращения мотор-колеса на полном газу будет соотвественно 0.75, 0.5, или 1.25 от номинальной.
То есть, вы вполне можете регулировать максимальную скорость в некоторых пределах чисто изменением напряжения аккумуляторной батареи и контроллера.
Есть контроллеры на двойное напряжение — например, на 36/48 вольт, или на 48/60 вольт.
Также важный параметр контроллеров применительно к электродвигателю — это его ампераж, через который может быть установлена максимальная мощность достигаемая мотором, который он питает — например, 36v 17A = ~ 612 watt, 60V 25A =~ 1500w
Дело в том, что указанная на моторколесе «мощность в ваттах» — это скорее рекомендуемая долговременная, при которой он не перегреется, и при которой гарантируется его долгая и счастливая жизнь.
А так-то на 250 ватт мотор можно и 500, и 800 ватт, и даже киловатт подать — понятно, это в долговременной преспективе может не понравится пластиковым шестерёнкам, или фривилу, но считается что двух — трехкратное форсирование большинство моторколёс переносит относительно хорошо.
Впрочем — контроллеры достойны отдельной статейки, по этому в эти дебри сейчас углублятся не будем.
Что ещё важно — усилители дропаутов (torque arm).
В силу того, что рама обычных велосипедов не предназначена на сопротивление оси колёс на скручивание, особенно, в случае алюминиевой вилки / рамы, крайне рекомендуется принимать меры против проворачивания оси мотор-колеса.
Дело в том, что согласно чему-то там любое действие рождает противодействие.
Мотор-колесо крутит обод, опираясь на ось, то есть ось колеса у неё как точка опоры, которую она при этом пытается провернуть в другую сторону.
Если пазы вилки этот момент не выдерживают, они ломаются, как следствие — колесо уезжает отдельно, велосипед на скорости перьями вилки втыкается в асфальт. К чему это приводит — надеюсь, обьяснять не надо, поломки костей и даже морг в результате — вполне вероятны.
К чему это приводит — надеюсь, обьяснять не надо, поломки костей и даже морг в результате — вполне вероятны.
Удачи в электрификации, друзья!
ПС что-то глаза у меня тут недобрые — впервые сам это, на большой картинке, заметил…
но вообще то я белый и пушистый, если рано с утра на работу не надо ехать…:D
Тяговый асинхронный электродвигатель для мотор-колёс транспортных средств
Автор:
Смирнов Константин Викторович
Рубрика: Технические науки
Опубликовано
в
Молодой учёный
№18 (152) май 2017 г.
Дата публикации: 07. 05.2017
05.2017
2017-05-07
Статья просмотрена:
330 раз
Скачать электронную версию
Скачать Часть 1 (pdf)
Библиографическое описание:
Смирнов, К. В. Тяговый асинхронный электродвигатель для мотор-колёс транспортных средств / К. В. Смирнов. — Текст : непосредственный // Молодой ученый. — 2017. — № 18 (152). — С. 83-85. — URL: https://moluch.ru/archive/152/42097/ (дата обращения: 02.10.2022).
Проблема замены энергии углеводородов в силовых агрегатах транспортных средств и не только является одной из основных в современном мире. Целью работы является проектирование тягового асинхронного двигателя для мотор-колеса, который смог бы стать более технологичной заменой трансмиссии автомобиля. Стремительный рост потребления топливно-энергетических ресурсов приводит к возникновению проблемы приближающегося энергетического кризиса. Известно, что современный автомобиль имеет достаточно хорошие показатели топливной экономичности и экологичности. В то же время, при движении в режиме городского цикла, представляющего собой постоянное чередование фаз разгона, равномерного движения, замедления и стоянки с работающим на холостом ходу двигателе, эти показатели существенно ухудшаются. Причин этому несколько. Недостаточное использование потенциальной мощности двигателя при движении с ограниченной в условиях города скоростью, вследствие чего двигатель работает с повышенными удельными расходами.
Стремительный рост потребления топливно-энергетических ресурсов приводит к возникновению проблемы приближающегося энергетического кризиса. Известно, что современный автомобиль имеет достаточно хорошие показатели топливной экономичности и экологичности. В то же время, при движении в режиме городского цикла, представляющего собой постоянное чередование фаз разгона, равномерного движения, замедления и стоянки с работающим на холостом ходу двигателе, эти показатели существенно ухудшаются. Причин этому несколько. Недостаточное использование потенциальной мощности двигателя при движении с ограниченной в условиях города скоростью, вследствие чего двигатель работает с повышенными удельными расходами.
Мотор-колесо — разновидность ведущего колеса, комплексный агрегат, в котором объединены непосредственно колесо, электрический двигатель, силовая передача и тормозная система [1]. Обязательной составляющей любого мотор-колеса является автоматическая система управления, которая обеспечивает согласованную работу всех четырёх приводов.
Следует отметить, что по способу управления автомобиль с мотор-колёсами не должен отличатся от автомобиля со стандартным двигателем внутреннего сгорания.
Преимущества такой технологии являются:
‒ Надежная конструкция.
‒ Высокая точность динамических характеристик привода.
‒ Максимально высокие показатели точности работы.
‒ Способность развивать довольно большую скорость.
‒ Большой крутящий момент.
‒ Быстрое ускорение.
‒ Низкий уровень шума и вибрации.
‒ Высокий КПД.
‒ Удобство и простота установки.
Недостатки:
‒ Незначительное магнитное сопротивление.
‒ Большой вес установки.
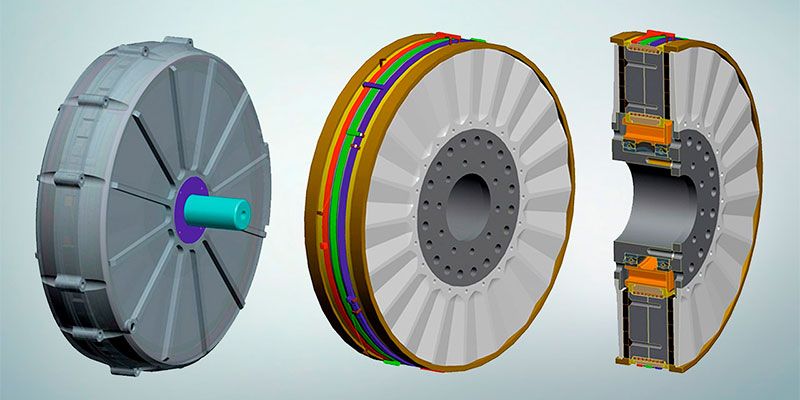
В авторской концепции предложена силовая установка для полноприводного автомобиля, позволяющая улучшить его динамические показатели и при этом значительно снизить вредные выбросы в окружающую среду. В состав мотор-колеса входят: встроенные в него тяговый электродвигатель, силовая передача и тормозная система. Таким образом, каждое колесо имеет индивидуальный привод. В зависимости от конструктивных особенностей мотор-колёса бывают безредукторные, редукторные и мотор-полуоси.
Таким образом, каждое колесо имеет индивидуальный привод. В зависимости от конструктивных особенностей мотор-колёса бывают безредукторные, редукторные и мотор-полуоси.
Для создания прототипа системы управления мотор-колесом выбран микроконтроллер ATmega16A и составлена программа опроса датчиков тока и напряжения. У выбранного по критерию невысокой цены микроконтроллера имеется достаточно выводов для подключения как датчиков, так и исполнительных устройств, а также имеется многофункциональная система программирования в среде AVR Studio.
В ходе научной работы спроектирована принципиальная схема электропривода, разработана архитектура системы управления.
Рис. 1. Модель в системе MATLAB.
Рис. 2. Графики тока статора и скорости вращения двигателя.
Литература:
1. В. И. Анурьев Справочник конструктора-машиностроителя: В 3 т. Т1/Под ред. И. Н. Жестковой. — М.: Машиностроение, 2001.- 920 с.
Основные термины (генерируются автоматически): AVR, MATLAB, силовая передача, тормозная система.
Похожие статьи
Моделирование моментов нагрузки электродвигателей в
MATLAB
Моделирование САР скорости асинхронного двигателя с переменными ΨR — IS в системе абсолютных единиц в Matlab-Script.
Математическая модель электропривода на базе БДПТ в пакете…
Структура модели тормозного прерывателя (Braking chopper model) представлена на рис. 14. Блоки Capacitive DC bus with braking chopper и Braking chopper даны на рис. 15.
Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие.
Использование математических пакетов
Matlab & Simulink при…
Построение логических схем с использованием Matlab/Simulink и Scilab/Xcos. Модель системы передачи данных с использованием помехоустойчивых кодов LT в среде Simulink для каналов со стираниями пакетов.
Компьютерное моделирование гидравлических
систем
В литературе также встречается термин «гидропередача», под которым понимается силовая часть гидропривода, включающая насос, гидродвигатель и
Рассмотрим примеры моделирования гидравлической системы в Matlab в стационарном режиме и динамическом.
Построение логических схем с использованием
Matlab/Simulink…
Рис. 5. Схемы логических систем в Matlab/Simulink.
Теоретические предпосылки для оценки показателей надежности устройства передачи сигналов с использованием программируемых логических интегральных схем в составе волоконно-оптических систем связи.
Векторное управление активным выпрямителем напряжения
Активный преобразователь напряжения может работать в режиме выпрямителя, если передача энергии идет из питающей сети в двигатель и
В этом случае справедлива система: Ниже представлена модель MATLAB/Simulink системы управления, использующей этот принцип.
Проектирование релейной защиты понижающей подстанции…
Представлена модель подстанции и реализация и срабатывание выключателя в системы Matlab.
Для СЭС характерно единое построение рациональной схемы, выбора силовой и коммутационной аппаратуры, устройств релейной защиты и автоматики (РЗиА) [4].
Моделирование
передачи данных через трехфазный каротажный…
OFDM-сигналы в телекоммуникационных системах беспроводной передачи данных. Использование математических пакетов Matlab & Simulink при разработке цифровых фильтров.
Моделирование электропривода на базе бесконтактного двигателя…
Для передачи данных на декодер необходимо в параметрах Bus Selector 1 из списка слева (Signals in the bus) выбрать сигналы Hall effect signal (h_a
Герман-Галкин С. Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. – СПб.
Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. – СПб.
Похожие статьи
Моделирование моментов нагрузки электродвигателей в
MATLAB
Моделирование САР скорости асинхронного двигателя с переменными ΨR — IS в системе абсолютных единиц в Matlab-Script.
Математическая модель электропривода на базе БДПТ в пакете…
Структура модели тормозного прерывателя (Braking chopper model) представлена на рис. 14. Блоки Capacitive DC bus with braking chopper и Braking chopper даны на рис. 15.
Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие.
Использование математических пакетов
Matlab & Simulink при…
Построение логических схем с использованием Matlab/Simulink и Scilab/Xcos. Модель системы передачи данных с использованием помехоустойчивых кодов LT в среде Simulink для каналов со стираниями пакетов.
Модель системы передачи данных с использованием помехоустойчивых кодов LT в среде Simulink для каналов со стираниями пакетов.
Компьютерное моделирование гидравлических
систем
В литературе также встречается термин «гидропередача», под которым понимается силовая часть гидропривода, включающая насос, гидродвигатель и
Рассмотрим примеры моделирования гидравлической системы в Matlab в стационарном режиме и динамическом.
Построение логических схем с использованием
Matlab/Simulink…
Рис. 5. Схемы логических систем в Matlab/Simulink.
Теоретические предпосылки для оценки показателей надежности устройства передачи сигналов с использованием программируемых логических интегральных схем в составе волоконно-оптических систем связи.
Векторное управление активным выпрямителем напряжения
Активный преобразователь напряжения может работать в режиме выпрямителя, если передача энергии идет из питающей сети в двигатель и
В этом случае справедлива система: Ниже представлена модель MATLAB/Simulink системы управления, использующей этот принцип.
Проектирование релейной защиты понижающей подстанции…
Представлена модель подстанции и реализация и срабатывание выключателя в системы Matlab.
Для СЭС характерно единое построение рациональной схемы, выбора силовой и коммутационной аппаратуры, устройств релейной защиты и автоматики (РЗиА) [4].
Моделирование
передачи данных через трехфазный каротажный…
OFDM-сигналы в телекоммуникационных системах беспроводной передачи данных. Использование математических пакетов Matlab & Simulink при разработке цифровых фильтров.
Использование математических пакетов Matlab & Simulink при разработке цифровых фильтров.
Моделирование электропривода на базе бесконтактного двигателя…
Для передачи данных на декодер необходимо в параметрах Bus Selector 1 из списка слева (Signals in the bus) выбрать сигналы Hall effect signal (h_a
Герман-Галкин С. Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. – СПб.
Плюсы и минусы центральных моторов для электровелосипедов / Автомобили и другие средства передвижения и аксессуары / iXBT Live
Электромоторы для велосипеда бывают двух основных типов: центральные «mid drive motor» (вращают трансмиссию велосипеда) и мотор-колеса (вращают непосредственно колесо). На чем же остановиться? В своем обзоре самого мощного серийного мотора для электровелосипеда Bafang G510 я коснулся этой темы, теперь же более развернуто рассмотрим плюсы и минусы центральных моторов. Сравнивать будем с другим проверенным решением: мотор-колесами. В качестве иллюстраций будет использован мой самосборный электровелосипед с центральным (кареточным) мотором Bafang BBS02B 750 Вт
Сравнивать будем с другим проверенным решением: мотор-колесами. В качестве иллюстраций будет использован мой самосборный электровелосипед с центральным (кареточным) мотором Bafang BBS02B 750 Вт
Почему Bafang? Есть брендовые электровелосипеды с центральными моторами и с каждым сезоном их становится все больше. Но цены, цены не порадуют. Велосипед с мотором Bosch или поддержанная иномарка. А еще программное ограничение скорости, чтобы вписаться в требования ПДД.
У китайских производителей Bafang/8FUN/Cyclon/Tongsheng цена доступнее и ограничений нет.
Содержание
- Плюсы
- 1. Тяга
- 2. Возможность полноценной работы трансмиссии
- 3. Сохранение правильной балансировки
- 4. Замена камеры
- 5. Нагрузка на узлы
- 6. Встроенный в мотор контроллер
- 7. Заметность
- Минусы
- 1. Повышенный износ трансмиссии
- 2. Цена
- 3. Шумность
- 4. Нюансы установки
- 5. Меньшая максимальная скорость
- 6.
 Необходимость обслуживания
Необходимость обслуживания
- Заключение
 Необходимость обслуживания
Необходимость обслуживанияПлюсы
Начнем с приятного для владельцев центральных моторов.
1. Тяга
В центральном моторе уже находится свой редуктор, а так же центральный мотор вращает ведущую звездочку трансмиссии велосипеда. А это значит, высокий вращающий момент на колесе.
Например, для моей модели мотора передаточное отношение всех ступеней редуктора 1:21,9 + цепь с кассетой 11-46 зубьев. У мотор-колес тоже есть редукторные версии, но до таких передаточных отношений им далеко.
Какое преимущество это дает?
Подъем в гору, вязкая грязь и песок больше не проблема, с кареточным мотором вы их больше не замечаете. Включаем пониженную передачу и спокойно проезжаем. Для поездок по пересеченной местности то, что нужно.
2. Возможность полноценной работы трансмиссии
Во-первых, Вы можете так же крутить педали как на обычном велосипеде (я так и катаюсь в режиме ассистента), тем самым экономнее расходуя батарею. Мощность обычного велосипедиста оценивают в примерно 200 Вт, это будет подспорьем к мощности мотора.
Мощность обычного велосипедиста оценивают в примерно 200 Вт, это будет подспорьем к мощности мотора.
Во вторых, можно в широких пределах управлять скоростью и крутящим моментом велосипеда. А в случае с мотор- колесом педали и цепь можно вообще убрать.
Если сядет аккумулятор, всегда можно доехать на педалях, сопротивление качению у центрального мотора минимальное, в отличие от мотор-колес прямого привода.
3. Сохранение правильной балансировки
Центральный мотор находится максимально внизу и это положительно сказывается на управляемости электровелосипедом.
Скажите такое положение влияет на клиренс велосипеда? Это не так, ведь любой кто ездил на велосипеде знает, клиренс велосипеда — это нижняя точка педалей! А если перепрыгивая бревно, вы заденете его кареточным мотором… то не повезло бревну. Там толстые стенки корпуса, переживать не нужно.
Еще немало важно, что работа подвески велосипеда не ухудшается за счёт того, что колёса велосипеда с центральным мотором остаются по прежнему лёгкими. С мотор-колесом есть эффект гири в заднем маятнике, в случае велосипеда двухподвеса. Тяжелое колесо ухудшает управляемость и накат.
С мотор-колесом есть эффект гири в заднем маятнике, в случае велосипеда двухподвеса. Тяжелое колесо ухудшает управляемость и накат.
4. Замена камеры
Я понимаю, сейчас рулят бескамерные покрышки с герметиком. Но все же, если у вас случится прокол на мотор-колесе, поменять покрышку или камеру будет сущим испытанием. От колеса идут провода, оно тяжелое и стоит на гайках…
С центральным мотором вы меняете камеру как на обычном велосипеде.
5. Нагрузка на узлы
Центральный или его вариант кареточный мотор ставится в в центральную часть рамы велосипеда, там максимально прочные трубы и связанная конструкция. Нагрузку воспринимает сама рама. Мотор-колесо заспицовывается в обод и нагрузку (динамическую) воспринимают спицы, а весит мощный мотор прямого привода килограмм 6-8…
Тут заодно и удобство монтажа сказывается.
Мотор-колесо на 1500 Вт весит 8 кг.
6. Встроенный в мотор контроллер
В моторах Bafang контроллер встроен в мотор, в мотор-колесах это отдельное устройство с проводами.
Да такой вариант не ремонтопригоден (залит компаундом), но есть три хороших плюса:
- Не нужно тянуть кучу проводов и ломать голову как его закрепить.
- Герметичность.
- Хорошее охлаждение контроллера за зачет массивного алюминиевого корпуса мотора.
Кстати, контроллер можно настроить под себя с помощью Usb кабеля для программирования кареточных моторов Bafang. Да и экраны контроллера у Bafang смотрятся лучше.
Контроллер мотора Bafang 1000 Вт
7. Заметность
Центральный мотор имеет меньшую заметность по сравнению с мотор-колесом. Кому-то этот плюс покажется важным.
Главное — соблюдать правила дорожного движения!
Минусы
Как и любое инженерное решение, центральный мотор имеет и ряд минусов. Сейчас их перечислим.
1. Повышенный износ трансмиссии
Велосипедные комплектующие рассчитаны на обычного человека, и если мы дополняем велосипед мощным мотором то все комплектующие будут быстрее изнашиваться. Это касается в первую очередь цепи и кассеты.
У меня получается где-то в пять раз быстрее идет износ, по сравнению с обычным мускульным велосипедом, хотя переключаю передачи с выключенным мотором. Рекомендуется использовать специальный датчик, который выключает мотор при переключении передач.
И еще, мотор дает огромное усилие на цепь и при нештатных ситуациях словить такое очень просто, даже «ой» не успеете сказать.
2. Цена
Если брать комплект одной мощности, мотор-колеса имеют преимущество в цене (до 30%). И для мотор-колес более гибкий подбор комплектующих (контроллеры, дисплеи, курки акселератора) для сборки электровелосипеда. Но в любом случае удовольствие не дешевое.
3. Шумность
Из-за наличия редуктора, шумность центрального мотора выше мотор-колес. Но, на деле, покрышки с развитыми грунтозацепами шумят примерно так же, при эксплуатации на это не обращаешь внимание.
4. Нюансы установки
Современный тренд в центральных моторах — это специализированная рама под конкретный мотор, что, конечно, сужает возможности для маневра пользователя.
Но ранние версии тех же Bafang имели свои нюансы для установки на велосипед:
- Ширина каретки (на 68 мм все отлично, на 73 уже нормально не затянешь гайку)
- Имеется смещение Q-фактора педалей в право
- Около каретки не должно быть выступающих частей рамы
- Мотор не имеет защиты от проворота по оси каретки (я делал свой кронштейн с выступом)
- Специальный ключ для монтажа
Мотор колесо, хоть и требует усилителей дропаутов на раме, но устанавливается на раму проще.
5. Меньшая максимальная скорость
Да, мотор-колеса прямого привода при прочих равных динамичнее набирают скорость и имеют большую максимальную скорость на асфальте.
На моем моторе BBS02B максимальная скорость чуть больше 50 км/ч, что для мощных мотор-колес только разминка. Но городской асфальт и не стихия кареточных моторов, им бы в горы, да на бездорожье.
6. Необходимость обслуживания
Встроенные в мотор зубчатые редукторы требуют обслуживания (замены смазочного материала, шестерен, подшипников) по мере работы. С мотор-колесами прямого привода в этом плане проще. И им проще поменять или отремонтировать контроллер.
С мотор-колесами прямого привода в этом плане проще. И им проще поменять или отремонтировать контроллер.
Заключение
Я свой выбор сделал.
Я бы отталкивался от типовой эксплуатации велосипеда; если это бездорожье, гористая местность и лесные грунтовки — то центральный мотор тут имеет больше преимуществ, если велосипед — пожиратель километров на ровном асфальте, то лучше взять мотор колесо прямого привода.
В статье я выразил только свое мнение, на опыте эксплуатации двух видов моторов для электровелосипеда. У кого есть возражения или дополнения — добро пожаловать в комментарии.
Спасибо за просмотр!
Электродвигатель самоката ситикоко
Электрический двигатель (электродвигатель) у двухколёсного CityCoco установлен непосредственно в заднем колесе, из-за чего получил название мотор-колесо. Он бесщёточный бесколлекторный и не имеет никаких трущихся элементов, за исключением подшипников, расположенных на оси. Таким образом, мотор-колесо является надежной, рассчитанной на долгую эксплуатацию конструкцией. Оно состоит из:
Таким образом, мотор-колесо является надежной, рассчитанной на долгую эксплуатацию конструкцией. Оно состоит из:
- железного статора с медными обмотками, который и является собственно электромагнитом — это самая дорогая часть двигателя;
- ротора с неодимовыми магнитами, который является частью самого колеса и вращается вокруг статора;
- датчиков холла или транзисторов, которые позволяют определить положение колеса относительно оси;
- подшипников, на которых осуществляется вращение.
Подшипники, как и датчики холла, имеют довольно длительный срок службы, но даже в случае выхода их из строя стоят совсем недорого и относительно легко меняются. Неодимы являются самыми мощными из когда-либо разработанных магнитов. Сила сцепления неодимовых магнитов позволяет им удерживать вес в 50-100 раз превышающий их собственный. В обычном состоянии такие магниты теряют не больше 1% своей намагниченности за 10 лет, что свидетельствует о их высокой стабильности. Но они не устойчивы к высокой температуре и теряют свои свойства при перегреве двигателя. Поэтому мотор-колесо прослужит долго только в условиях правильной эксплуатации.
Но они не устойчивы к высокой температуре и теряют свои свойства при перегреве двигателя. Поэтому мотор-колесо прослужит долго только в условиях правильной эксплуатации.
Почему же происходит нагревание электродвигателя и как избежать его перегрева?
Электродвигатель имеет такой параметр, как номинальная мощность. Это мощность, при которой он работает долгое время и не нагревается до высоких температур. Как правило, это мощность, потребляемая электрическим скутером (электрическим самокатом) при движении на максимальной скорости, при условии, что вес пилота вместе с пассажиром не превышает допустимый.
Второй параметр мощности электрического двигателя — это пиковая мощность, которая в некоторых случаях может значительно превышать номинальную. Для электродвигателя с номинальной мощностью 1000W она обычно равняется 1800W. Пиковая мощность – это мощность, при которой двигатель может работать непродолжительное время без последующего разрушения. Выход на пиковую мощность нужен для того, чтобы в нужный момент Вы смогли выехать на крутую гору, резко ускориться в экстренной ситуации и так далее. Если злоупотреблять превышением допустимой нагрузки на электроскутер, то пиковая мощность превратится в постоянную и это может привести к падению коэффициента полезного действия (КПД) электрического двигателя, как следствие — потере свойств неодимовых магнитов и перегоранию обмоток статора. Если коэффициент полезного действия электродвигателя, к примеру, 80%, то это значит, что остальные 20% подаваемой на него мощности уходят на разогрев железного сердечника. Соответственно, 200W из 1000W будут тратиться на нагревание, что не так много для такого объема железа. Но не стоит забывать, что КПД электродвигателя меняется в зависимости от скорости вращения. При этом производители указывают максимальный КПД на определенных оборотах.
Выход на пиковую мощность нужен для того, чтобы в нужный момент Вы смогли выехать на крутую гору, резко ускориться в экстренной ситуации и так далее. Если злоупотреблять превышением допустимой нагрузки на электроскутер, то пиковая мощность превратится в постоянную и это может привести к падению коэффициента полезного действия (КПД) электрического двигателя, как следствие — потере свойств неодимовых магнитов и перегоранию обмоток статора. Если коэффициент полезного действия электродвигателя, к примеру, 80%, то это значит, что остальные 20% подаваемой на него мощности уходят на разогрев железного сердечника. Соответственно, 200W из 1000W будут тратиться на нагревание, что не так много для такого объема железа. Но не стоит забывать, что КПД электродвигателя меняется в зависимости от скорости вращения. При этом производители указывают максимальный КПД на определенных оборотах.
Рассмотрим следующий пример:
— Многие говорят: «у меня очень сильно греется двигатель, несмотря на то, что я езжу в самом щадящем режиме, не превышаю даже 10 км/ч». И это одно из самых распространённых заблуждений. Для наиболее эффективного использования энергии рекомендуется ездить со скоростью выше 50% от максимальной. При снижении числа оборотов коэффициент полезного действия электродвигателя падает. Поэтому вероятность перегреть двигатель наивысшая не в момент движения на высокой (максимальной) скорости, а при движении на маленькой скорости, если при этом он испытывает большую нагрузку. Коэффициент полезного действия двигателя имеет наименьшее значение при холостых оборотах. Однако и это не так сильно перегружает и перегревает двигатель. Следует обратить внимание, что КПД значительно снижается в момент старта с этого самого холостого хода при низких оборотах. В этом случае двигатель с номинальной мощностью 1000W потребляет пиковую мощность 1800W, из которых 70% (1260W) уходит на его нагрев. Это также случается при резком старте с места, подъеме на крутую гору, при езде в глубоком песке и тому подобных случаях. «А как же и где тогда ездить?» – спросите Вы.
И это одно из самых распространённых заблуждений. Для наиболее эффективного использования энергии рекомендуется ездить со скоростью выше 50% от максимальной. При снижении числа оборотов коэффициент полезного действия электродвигателя падает. Поэтому вероятность перегреть двигатель наивысшая не в момент движения на высокой (максимальной) скорости, а при движении на маленькой скорости, если при этом он испытывает большую нагрузку. Коэффициент полезного действия двигателя имеет наименьшее значение при холостых оборотах. Однако и это не так сильно перегружает и перегревает двигатель. Следует обратить внимание, что КПД значительно снижается в момент старта с этого самого холостого хода при низких оборотах. В этом случае двигатель с номинальной мощностью 1000W потребляет пиковую мощность 1800W, из которых 70% (1260W) уходит на его нагрев. Это также случается при резком старте с места, подъеме на крутую гору, при езде в глубоком песке и тому подобных случаях. «А как же и где тогда ездить?» – спросите Вы. Ведь у нас нет идеально ровных дорог, иногда нужно ускориться, что бы кого-то обогнать, а в деревнях и вовсе зачастую дороги из песчано-гравийных смесей. В стандартных условиях эксплуатации не избежать выходов двигателя на пиковую мощность и ничего страшного, если он испытывает такие нагрузки. Главное, что бы они не были долговременными.
Ведь у нас нет идеально ровных дорог, иногда нужно ускориться, что бы кого-то обогнать, а в деревнях и вовсе зачастую дороги из песчано-гравийных смесей. В стандартных условиях эксплуатации не избежать выходов двигателя на пиковую мощность и ничего страшного, если он испытывает такие нагрузки. Главное, что бы они не были долговременными.
Многочисленные тесты показали, что для разогрева типичного двигателя до критической температуры нужно от 10 до 20 минут непрерывного пребывания двигателя под нагрузкой (зависит от температуры окружающей среды и степени той самой нагрузки). При обычной езде электрический скутер не испытывает критических нагрузок, но любителям экстремальной езды следует быть осторожными. Также, обязательно контролируйте давление в покрышках. Езда со спущенными покрышками значительно увеличивает нагрузку на двигатель, что может привести к его перегреву. Стандартное давление в шинах в районе 1,5 атмосфер. Однако оно может быть в районе 1 атмосферы при эксплуатации одним пилотом с весом не более 70 кг, и не менее 2 (до 2,5) атмосфер при постоянной эксплуатации вдвоём и общем весе 150 и более кг.
Вывод: обращайте внимание на температуру электродвигателя после повышенной нагрузки — экстремальная езда, езда вдвоём, преодоление крутых подъемов… При этом не так страшен короткий подъём в крутую горку, как длительная затяжная езда в горку с меньшим углом, когда двигатель долгое время работает под нагрузкой. Температуру двигателя можно контролировать прикосновением руки к колесному диску. Он должен быть теплый. Если двигатель нагрелся так сильно, что Вам некомфортно держать руку или Вы вовсе не можете прикоснуться к диску, нужно обязательно дать ему остыть и в дальнейшем эксплуатировать электросамокат в более щадящем режиме. Помните: при постоянных перегревах электродвигателя (нагревании выше 100 градусов), его срок службы может значительно сократиться. Также может сгореть один либо несколько витков обмотки статора, что вовсе выведет Ваш двигатель из строя.
Какие же всё-таки двигатели устанавливаются на современные электрические самокты CityCoco?
Ситуация с электродвигателями, устанавливаемыми на электрические самокаты CityCoco от различных производителей похожа на ту, которая сложилась с литий-ионными аккумуляторными батареями (описывали ранее в статье «Что скрывает аккумулятор ситикоко?»). В Китае масса заводов, которые производят множество различных вариантов электродвигателей в типичном корпусе. Самой дорогостоящей частью является железный статор, который в паре с обмотками является электромагнитом, а также неодимовые магниты. И вот здесь при производстве электромотора могут возникать варианты для экономии и дополнительного зарабатывания денег. А при недостаточном соотношении количества железа в статоре к мощности двигателя, его КПД уменьшается.
В Китае масса заводов, которые производят множество различных вариантов электродвигателей в типичном корпусе. Самой дорогостоящей частью является железный статор, который в паре с обмотками является электромагнитом, а также неодимовые магниты. И вот здесь при производстве электромотора могут возникать варианты для экономии и дополнительного зарабатывания денег. А при недостаточном соотношении количества железа в статоре к мощности двигателя, его КПД уменьшается.
В качестве примера возьмем самый распространенный на сегодняшний день двигатель CityCoco на стандартном колесе, размером 8 дюймов. До недавнего времени в большинстве случаев эти двигатели выпускались с мощностью 1000W. Ширина неодимовых магнитов в таких двигателях должна соответствовать 50 мм. Однако с целью экономии некоторые недобросовестные производители устанавливают статор и магниты шириной 40 мм.
Такой двигатель потребляет энергию, как 1000-ваттный, а по тяговым характеристикам проявляет себя, как 800-ваттный. Неэффективное использование мощности уходит на нагрев обмоток и вероятность их перегорания значительно возрастает.
Неэффективное использование мощности уходит на нагрев обмоток и вероятность их перегорания значительно возрастает.
В большинстве случаев «количество железа» на брендовых двигателях можно узнать по серийному номеру на самом колесном диске. Толщина магнитов соответствует толщине железного сердечника, измеряется в миллиметрах и обозначается буквой H. Во всех наших электросамокатах используются брендовые двигатели крупных китайских производителей: Weite Motor и QS MOTORS (один из лучших брендов – устанавливается на CityCoco EectroDrive Harley LUX). Первые имеют четко нанесённый и легко различимый номер, который состоит из буквенных и цифровых символов, обозначающих вольтаж, толщину неодимовых магнитов, мощность двигателя и собственно серийный номер производства. Вторые имеют обязательное литьё или теснение фирменного знака (логотипа) и голографическую наклейку.
В последнее время всё чаще стали встречаться электромоторы с мощностью 1500 и даже 2000 Ватт.
При этом 8-ми дюймовое мотор-колесо, которое устанавливается на CityCoco с номинальной мощностью 1000W, должно иметь ширину магнитов и статора 50 мм, с номинальной мощностью 2000W – 60 мм. Разница в стоимости двигателя c 5 и 6 сантиметровым статором в районе 100 условных едениц, не считая покупки более мощного контроллера. Поэтому не стоит «вестись» на дешёвую цену при заявленном мощном электродвигателе. Как правило, в этих случаях реальность далека от характеристик озвучиваемых продавцом. Некоторые недобросовестные производители и продавцы под видом 2000W подают обычный 1000-ваттный двигатель в паре с более мощным контроллером, меняя лишь одну цифру на корпусе мотора. Такой двигатель действительно будет потреблять 2000W и ехать несколько лучше, чем стандартный «киловаттник», но далеко не так, как самокат с настоящим 2000-ваттным двигателем. При этом его КПД значительно ниже и его очень легко сжечь при нагрузках. В таких случаях практически всегда китайцы не указывают толщину магнитов на корпусе колеса, так как обман легко всплывёт при вскрытии двигателя. А поскольку толщина магнитов не указана, то и обмана якобы нет. А то что стоит цифра 2000W, так это пиковая мощность.
Разница в стоимости двигателя c 5 и 6 сантиметровым статором в районе 100 условных едениц, не считая покупки более мощного контроллера. Поэтому не стоит «вестись» на дешёвую цену при заявленном мощном электродвигателе. Как правило, в этих случаях реальность далека от характеристик озвучиваемых продавцом. Некоторые недобросовестные производители и продавцы под видом 2000W подают обычный 1000-ваттный двигатель в паре с более мощным контроллером, меняя лишь одну цифру на корпусе мотора. Такой двигатель действительно будет потреблять 2000W и ехать несколько лучше, чем стандартный «киловаттник», но далеко не так, как самокат с настоящим 2000-ваттным двигателем. При этом его КПД значительно ниже и его очень легко сжечь при нагрузках. В таких случаях практически всегда китайцы не указывают толщину магнитов на корпусе колеса, так как обман легко всплывёт при вскрытии двигателя. А поскольку толщина магнитов не указана, то и обмана якобы нет. А то что стоит цифра 2000W, так это пиковая мощность. И доказать обратное невозможно.
И доказать обратное невозможно.
А как же быть с двигателями мощностью 1500W? Здесь ситуация несколько иная. Следует помнить, что на мощность электромотора также влияет и намагниченность самих магнитов. Мы расписали характеристики двигателей с учетом того, что при использовании статора шириной 5 см чаще всего используют самые слабые магниты с индексом намагниченности 35 и электрический мотор с таким статором имеет реальную мощность 1000W. При использовании магнитов с индексом намагниченности 45, такой двигатель может иметь реальную мощность около 1500W. Такой же индекс намагниченности должен быть и в настоящих 2-х кВт двигателях с шириной статора 6 см. Иначе они не смогли бы обеспечить постоянное движение на скорости свыше 50 км/ч. В случае, если магниты стоят слабые, то либо максимальная скорость будет ниже, либо такой двигатель очень быстро выйдет из строя – сгорит обмотка статора.
Однако проверить намагниченность неодимовых магнитов практически невозможно, и зачастую многие недобросовестные производители пользуются этим в своих целях для зарабатывания денег.
Поэтому в большинстве случаев при покупке электрических самокатов CityCoco при выборе двигателя с той или иной мощностью приходится полагаться на добропорядочность продавца, а тот в свою очередь должен быть уверен в качестве завозимой им техники и полагаться на добропорядочность производителя.
В конце 2018 года массово начали применяться двигатели 1500-2000W в 10 или 12-ти дюймовых легкосплавных алюминиевых дисках. Они имеют презентабельный внешний вид и менее подвержены перегреву. К слову сказать, 12-ти дюймовый диск всегда ставился на модель CityCoco ElectroDrive Harley LUX. Но он имеет низкий профиль и самокат более чувствителен к различным неровностям дороги. А сейчас 10-ти дюймовый литой диск получил лидер продаж среди двухместных электрических самокатов марки CityCoco ElectroDrive — SMD X8. Использование этого двигателя позволило увеличить запас хода и динамику.
Разные заводы в Китае выпускают такие двигатели в различных по внешнему виду корпусах, но начинка как правило у всех одинаковая. Здесь добросовестные изготовители применяют неодимовые магниты со степенью намагниченности 45, что соответствует 1500W. При параметре намагниченности 40, мощность не будет соответствовать заявленной и будет в районе 1200W. 2000W достигается в сочетании с дополнительными витками обмотки. Данный тип мотор-колеса способен выдержать такие нагрузки, так как двигатель установлен в алюминиевом диске и имеет дополнительную площадь охлаждения. На практике, он греется даже меньше, чем 8-ми дюймовое мотор-колесо.
Здесь добросовестные изготовители применяют неодимовые магниты со степенью намагниченности 45, что соответствует 1500W. При параметре намагниченности 40, мощность не будет соответствовать заявленной и будет в районе 1200W. 2000W достигается в сочетании с дополнительными витками обмотки. Данный тип мотор-колеса способен выдержать такие нагрузки, так как двигатель установлен в алюминиевом диске и имеет дополнительную площадь охлаждения. На практике, он греется даже меньше, чем 8-ми дюймовое мотор-колесо.
А сейчас постараемся кратко описать преимущества и недостатки каждого электрического двигателя.
1000W 8-ми дюймовое мотор-колесо является отличным выбором для тех, кому не нужна высокая скорость, и скутер не будет подвергаться большим нагрузкам. При соблюдении условий эксплуатации на таком моторе можно добиться максимальной дальности пробега. Контроллер в паре с таким двигателем выдаёт пиковую мощностью 1800W. А при больших нагрузках пиковая мощность может превратиться в постоянную, что недопустимо, так как для него это превышение номинальной мощности на 80%. Обмотка статора таких двигателей может гореть при неправильной эксплуатации. Чтобы предотвратить это при превышении номинальной температуры, необходимо вовремя остановиться и продолжить движение только после остывания электромотора.
Обмотка статора таких двигателей может гореть при неправильной эксплуатации. Чтобы предотвратить это при превышении номинальной температуры, необходимо вовремя остановиться и продолжить движение только после остывания электромотора.
А вот с мощностью двигателя в 1500W при аналогичных условиях эксплуатации Вы будете чувствовать себя куда более гораздо уверенно. Ключевой здесь является фраза: «при аналогичных условиях эксплуатации». Однако более мощный двигатель даёт нам возможность пользоваться повышенными характеристиками самоката (будь-то старт с места, разгон, скорость) и мы, как правило, начинаем этим злоупотреблять и быстрее разряжаем батарею, а следовательно снижаем дальность пробега на одном заряде.
2000W 8-ми дюймовое колесо имеет значительно выше запас мощности, и используется в паре с контроллером 2000W. Превышение номинальной мощности всего на 20%, а не на 80% как в случае с 1000W двигателем. Случаев перегорания обмотки у таких двигателей фактически нет. Но при этом возможен перегрев контроллера, особенно, если сделана дополнительная герметизация и отсутствует его обдув. Последнее может привести к оплавке проводов и выходу контроллера из строя.
Но при этом возможен перегрев контроллера, особенно, если сделана дополнительная герметизация и отсутствует его обдув. Последнее может привести к оплавке проводов и выходу контроллера из строя.
2000W 10-12-ти дюймовое колесо имеет выше КПД на низких оборотах, из-за более длинного рычага, более резкий старт до 15 км/ч, и меньше греется благодаря большому алюминиевому колесному диску. Однако при длительных перегрузках также существует проблема выхода из строя контроллера. Поэтому всегда следует помнить, что электрический самокат – это не спортивный байк и не следует пытаться выжать из него максимум возможного. Эта техника хоть и имеет очень хорошую динамику, предназначена в большей степени для спокойной размеренной езды.
Итак, подытожив, можно сказать следующее: в этой статье мы провели краткий обзор выпускаемых на сегодняшний день электродвигателей для самокатов CityCoco. Постарались осветить их технические характеристики и основные проблемы. Однако модели электрических самокатов постоянно совершенствуются, а с ними могут изменяться и электрические двигатели. С каким же двигателем выбирать свой электроскутер в конечном итоге решать Вам. Мы лишь можем посоветовать: во избежание каких-либо проблем, не приобретайте технику у непроверенных продавцов, торгующих единичным товаром, либо не имеющих техники вовсе и обещающих привезти «за дёшево» либо «в те же деньги» точно такой же, но с более мощным электродвигателем. Разочарование от езды на электросамокате с электромотором с характеристиками не соответствующими заявленным и затраты на ремонт или приобретение нового мотора будут гораздо большими, чем радость от экономии при покупке.
С каким же двигателем выбирать свой электроскутер в конечном итоге решать Вам. Мы лишь можем посоветовать: во избежание каких-либо проблем, не приобретайте технику у непроверенных продавцов, торгующих единичным товаром, либо не имеющих техники вовсе и обещающих привезти «за дёшево» либо «в те же деньги» точно такой же, но с более мощным электродвигателем. Разочарование от езды на электросамокате с электромотором с характеристиками не соответствующими заявленным и затраты на ремонт или приобретение нового мотора будут гораздо большими, чем радость от экономии при покупке.
Если Вы покупаете CityCoco ElectroDrive в нашем магазине в Минске, Вы можете выбрать любой тип двигателя с подходящими Вам параметрами. При этом не стоит бояться каких-либо проблем, так как вся техника находится на гарантии и соответствует заявленным характеристикам.
Акции, новости и специальные предложения Eltreco
При покупке велогибрида или набора для электрификации обычного велосипеда многие сталкиваются с необходимостью выбора между мотор-колесами различных типов. Какому hub-мотору отдать предпочтение – редукторному (geared) или с прямым приводом (direct drive)? Оба типа мотор-колес обладают определенными достоинствами и недостатками, и тому, кто впервые сталкивается с этим, разобраться бывает непросто.
Какому hub-мотору отдать предпочтение – редукторному (geared) или с прямым приводом (direct drive)? Оба типа мотор-колес обладают определенными достоинствами и недостатками, и тому, кто впервые сталкивается с этим, разобраться бывает непросто.
Общее мнение по этому вопросу таково: если вы «какой русский не любит быстрой езды» – двигатель с прямым приводом станет для вас правильным выбором. В случае, когда максимальная скорость имеет второстепенное значение, а на первом месте остается возможность легко крутить педали – вашим выбором будет редукторное мотор-колесо. На этом поиск плюсов и минусов типа привода мотор-колес не заканчивается – есть еще целый ряд преимуществ и особенностей, о которых пойдет речь ниже.
Классика жанра: прямой привод
Hub-моторы прямого привода стали первыми силовыми установками электробайков – они были разработаны давно и «обкатаны» десятилетиями использования. Директ-драйв моторы характеризуются высокой надежностью, благодаря совершенству конструкции и минимуму компонентов. Мотор-колеса этого типа отличают длительный срок службы и нетребовательность к сервисному обслуживанию. При разумной нагрузке и бережной эксплуатации двигатель может работать очень долго – в качестве расчетного периода обычно указывается срок в пять-десять лет. Максимальный ресурс hub-мотора зависит от качества изготовления комплектующих: датчиков Холла, опорных подшипников вала, характеристик используемых при производстве постоянных магнитов.
Мотор-колеса этого типа отличают длительный срок службы и нетребовательность к сервисному обслуживанию. При разумной нагрузке и бережной эксплуатации двигатель может работать очень долго – в качестве расчетного периода обычно указывается срок в пять-десять лет. Максимальный ресурс hub-мотора зависит от качества изготовления комплектующих: датчиков Холла, опорных подшипников вала, характеристик используемых при производстве постоянных магнитов.
Современные мотор-колеса прямого привода отличаются широким диапазоном мощности, максимальные значения которых для велогибридов достигают 3-5 kW. Существуют в природе и более мощные варианты, но они находят применение в других категориях электротранспорта. Скоростные качества директ-драйв моторов – это главное их преимущество перед собратьями с редукторами. Еще одним существенным отличием является возможность организовать процесс рекуперации: возврат части энергии при работе мотор-колеса в режиме генератора при свободном ходе и торможении.
Но возможность использования рекуперации электроэнергии не самым лучшим образом сказывается на накате электрогибрида: крутить педали при севшем аккумуляторе становиться занятием не из легких. И чем мощней двигатель – тем труднее будет добраться до ближайшей розетки. Еще одним недостатком двигателей этого типа становятся их большая собственная масса и габаритные размеры, также прямо пропорционально зависящие от мощности агрегата.
В общем, двигатель прямого привода подойдет тому райдеру, который ради больших скоростей готов рискнуть превращением своего велосипеда в электроскутер с педалями, пользоваться которыми в случае посаженной в ноль батареи будет весьма некомфортно.
Редукторный мотор: «троллейбусная» тяга
Электродвигатель со встроенным планетарным редуктором позволяет решить вопрос соотношения крутящего момента, габаритных размеров и собственного веса. Сложная конструкция hub-мотора, включающая обгонную муфту с набором шестерен, казалось бы, может сказаться на надежности и ресурсе использования. Но как показывает практика эксплуатации мощных и компактных редукторных электромоторов, в этом вопросе также все решает качество используемых при производстве материалов, и ресурс таких мотор-колес практически не уступает сроку службы моторов прямого привода.
Но как показывает практика эксплуатации мощных и компактных редукторных электромоторов, в этом вопросе также все решает качество используемых при производстве материалов, и ресурс таких мотор-колес практически не уступает сроку службы моторов прямого привода.
Сегодня для установки в колеса электровелосипедов используют редукторные двигатели мощностью от 250 до 500 Ватт – такой диапазон дает возможность решить большинство эксплуатационных задач, особенно учитывая тот факт, что величина крутящего момента 500-ваттного редукторника практически аналогична таковой у директ-драйв мотора мощностью в 1500 Ватт. Кроме небольшой собственной массы и скромных габаритов редукторный мотор отличается практическим отсутствием сопротивления качению – крутить педали велогибрида с таким мотор-колесом также легко, как ехать на обычном велосипеде.
К недостаткам моторов такого типа относят более сложную конструкцию, требующую периодического сервисного обслуживания. Существенной эту особенность назвать нельзя, поскольку статистика обращений в период гарантийного срока по поводу неисправностей показывает только очень небольшое число (1-2%) отказа датчиков Холла или поломки, вызванные нарушением условий эксплуатации: завышенное напряжение питания, приводящее к перегреву двигателя, попадание влаги извне и т. д.
Существенной эту особенность назвать нельзя, поскольку статистика обращений в период гарантийного срока по поводу неисправностей показывает только очень небольшое число (1-2%) отказа датчиков Холла или поломки, вызванные нарушением условий эксплуатации: завышенное напряжение питания, приводящее к перегреву двигателя, попадание влаги извне и т. д.
Отсутствие режима рекуперации – еще один «минус» мотор-колес со встроенным редуктором. Те, кто не понаслышке знаком с реализацией рекуперации в электровелосипедах, понимают, что надеяться на волшебный заряд аккумулятора в процессе поездки не приходится. Батарея в этом режиме получает максимум 10% затраченной электроэнергии, и то – при удачном стечении обстоятельств и перепадов рельефа.
Отличительной особенностью планетарного редуктора также можно назвать уровень шума – «троллейбусный» гул двигателя хорошо заметен при наборе оборотов, но поскольку рабочий уровень шума не превышает порога в 55дБ, то это обычно не является особой проблемой.
В общем, если вам нужна хорошая тяга, и вы не собираетесь ездить исключительно на ручке газа со скоростью выше 35 километров в час – стоит остановить свой выбор на редукторном мотор-колесе. В этом случае вы всегда сможете рассчитывать на свои силы, когда «сядет батарейка», а также эффективно использовать возможности велогибрида, используя его в комбинированном режиме помощи электромотора привычному педалированию.
Подпишитесь
на нашу рассылку
и первым узнавайте о новостях компании и акциях!
Приводные элементы электровелосипедов — Мега энергия
Главная → Полезно → Полезные статьи → Приводные элементы электровелосипедов
Приводные элементы электровелосипедов можно рассортировать в 3 вида:
Каретный электродвигатель, электродвигатель с центральным расположением.
Редукторное мотор-колесо (geared hub motor).
Моторколесо с прямым приводом (директ-драйв).
Начнём с номера первого: мид-драйв, центральный.
Оно, кстати, довольно популярно в брендовых всяких европейских электровелосипедах.
Находится вблизи каретки (педалей) велосипеда, через цепной привод, и механизм передач,
если на велосипеде такой есть, вращает заднее колесо.
Плюсы: если велосипед с передачами — широкий диапазон оптимального применения за счёт этих самых передачь — можно и хорошую тягу на малых оборотах получить, и высокую скорость.
Минусы: цепь и звёзды становятся расходником, если по пути порвёте цепь, или погнёте петух, или ещё как-то сломаете цепную передачу — домой будете возвращаться пешком толкая свой транспорт.
Алсо невозможен полнопривод с использованием одного мотора.
Номер второй: Редукторник, geared
Электродвигатель расположен внутри ступицы колеса, там же расположена зубчатая понижающая планетарная передача, которая даёт электродвигателю вращаться с большими оборотами, чем обод колеса.
Шестерёнки обычно из пластмассы.
Есть механизм передающий момент в системе колесо-мотор только в одном направлении — при тяге от двигателя (фривил, обгонная муфта).
В случае, когда передача идёт в обратном направлении, происходит разьединение системы, таким образом при накате, либо движении от педалей, электромотор не вращается, и тем самым не затрудняет вращение колеса.
Слева в разборе — директдрайв,
Справа в разборе— редукторник:
Редукторный мотор:
Плюсы: Лучшее кпд в широком диапазоне скоростей относительно директдрайва, лучшая тяга на малых скоростях и старте, меньший расход энергии на километр пробега, меньшие размеры и вес, отсутствие сопротивления движению при езде от педалей.
Минусы: отсутствие возможности использовать рекуперацию, слабое место в виде пластиковых шестеренок, при срезании зубьев каковой, либо порче обгонной муфты в пути, добираться придётся педалируя. Но! — про правильной эксплуатации и своевременном обслуживании, данные компоненты выхаживают до 30000км!
Номер третий: директдрайв
Самая, вроде, надёжная система за счёт минимизации лишних деталей — чистый электродвигатель, ротор сидит на оси и неподвижен относительно вилки, статор вращается вместе с колесом.
Плюсы: минимум лишних деталей, возможна рекуперация, легкое достижение высоких скоростей.
Минусы: относительно большой диаметр и вес, низкое кпд при малых скоростях.
Теперь про общие вопросы, связанные, в основном таки с моторколёсами, ибо миддрайв меня не интересует, так что я по нему не очень интересовался.
Итак, в целом — редукторное моторколесо более тяговитое и более экономичное.
Директдрайв — более скоростной, так что если хочется ездить на скоростях 40 — 50+, то скорее стоит присматриваться к директдрайвам.
Также у директдрайва посредством контроллера можно реализовать режим рекуперации — перевод электродвигателя в режим генератора с запасанием выработанной энергии обратно в аккумуляторную батарею.
Эффект от подзарядки аккумулятора рекуперацией достаточно мизерный — порядка увеличения на 2-3 процента пробега, плюс ещё там есть нюансы в виде больших токов зарядки, и того, что заряжать литиевый акб при температурах ниже +5 цельсия — это убивать его (относится и к мобилам и прочим бытовым девайсам на литий-ионе и литий -полимере, кстати), но зато его можно использовать в качестве тормоза, и таким образом экономить тормозные колодки.
Кстати, в «большом электротранспорте», в виде, к примеру, электропоездов ЭР2Т, рекуперативное торможение точно так и используется — до скорости порядка 25 км/ч поезд тормозит чисто введением тяговых электродвигателей в режим генераторов, отдавая выработанную электроэнергию обратно в контактную сеть.
Для экономичного вождения много полезнее минимально пользоваться торможением, и максимально — накатом — то есть видя красный сигнал светофора, к примеру, не переть прямо до него на газу, а метров за 300 закрыть газ, и накатом двигаться, чтобы к приезду к светофору иметь скорость не более 10-15 км/ч.
Что ещё: скорость езды.
Один из наиболее частых вопросов новичков — как быстро мой велосипед будет ехать на электроприводе?
Это прямо зависит от четырёх вещей:
1. Обороты холостого хода мотор-колеса при номинальном напряжении:
Нормальный продавец их либо указывает, либо эту информацию можно у него уточнить.
У моего моторколеса, к примеру, это 310 RPM при 48V. При замере китайским тахометром,
При замере китайским тахометром,
оказалось 305 оборот в минуту при питании от 4 последовательно соединённых свинцовых акб по 12 вольт (примерно 50 вольт фактически) на вывешенном колесе — приемлемо.
Не забывайте, что это обороты мотор-колеса без нагрузки, это важно!
2. Диаметр обода колеса. Понятно, что чем больше окружность колеса, тем больше будет фактическая скорость при равных оборотах.
Формула для расчёта: окружность колеса в миллиметрах / 1000 * (обороты мотор-колеса /60) = скорость в метрах в секунду. Для километров в час умножить на 3.6, для получения финальной прогнозируемой скорости — всё это ещё поделить на 1.2, ибо обороты под, даже вполне посильной нагрузкой, будут ниже, чем без нагрузки (приблизительно на 20 процент, да).
3. Соответствие мощности к сопротивлению движению.
Если у вас расчётная скорость получилась 50 км/ч, для достижения и поддержания таковой скорости мотор должен будет развивать мощность порядка киловатта, или 1000 ватт.
Если ваш мотор будет развивать мощность в 500 ватт, то из-за сопротивления вращению он не сможет достичь своих максимальных оборотов, понятно, и вы будете довольствоваться максимальной скоростью в 37 км/ч вместо 50 — при этом мотор ещё будет довольно сильно греться из-за перегрузки, если вы на такой скорости будете ездить на до конца выкрученной ручке газа.
4. Напряжение питания.
При покупке моторколеса, к нему указывается номинальное напряжение питания — к примеру, 48 вольт.
Но напрямую такие двигатели никто не питает — они управляются контроллером, который получает от аккумуляторной батареи однофазное постоянное напряжение, и преобразует его в трехфазное «вращающееся», для питания мотор-колеса.
Так вот, не обязательно питать моторколесо контроллером и батареей на указанное напряжение.
Вы можете питать 48-вольтовый мотор батареей и контроллером на 36 вольт.
Или на 24, или на 60 вольт — при этом скорость вращения мотор-колеса на полном газу будет соответственно 0.75, 0.5, или 1.25 от номинальной.
То есть, вы вполне можете регулировать максимальную скорость в некоторых пределах чисто изменением напряжения аккумуляторной батареи и контроллера.
Есть контроллеры на двойное напряжение — например, на 36/48 вольт, или на 48/60 вольт.
Также важный параметр контроллеров применительно к электродвигателю — это его ампераж, через который может быть установлена максимальная мощность достигаемая мотором, который он питает — например, 36v 17A = ~ 612 watt, 60V 25A =~ 1500w
Дело в том, что указанная на моторколесе «мощность в ваттах» — это скорее рекомендуемая долговременная, при которой он не перегреется, и при которой гарантируется его долгая и счастливая жизнь.
А так-то на 250 ватт мотор можно и 500, и 800 ватт, и даже киловатт подать — понятно, это в долговременной перспективе может не понравится пластиковым шестерёнкам, или фривилу, но считается что двух — трехкратное форсирование большинство моторколёс переносит относительно хорошо.
Впрочем, — контроллеры достойны отдельной статейки, по этому в эти дебри сейчас углубляться не будем.
Что ещё важно — усилители дропаутов (torque arm).
В силу того, что рама обычных велосипедов не предназначена на сопротивление оси колёс на скручивание, особенно, в случае алюминиевой вилки / рамы, крайне рекомендуется принимать меры против проворачивания оси мотор-колеса.
Дело в том, что согласно чему-то там любое действие рождает противодействие.
Мотор-колесо крутит обод, опираясь на ось, то есть ось колеса у неё как точка опоры, которую она при этом пытается провернуть в другую сторону.
Если пазы вилки этот момент не выдерживают, они ломаются, как следствие — колесо уезжает отдельно, велосипед на скорости перьями вилки втыкается в асфальт. К чему это приводит — надеюсь, объяснять не надо, поломки костей и даже морг в результате — вполне вероятны.
К чему это приводит — надеюсь, объяснять не надо, поломки костей и даже морг в результате — вполне вероятны.
Внутриколесные двигатели Protean Electric могут сделать электромобили более эффективными
Ожидания
Прежде чем показать робота, Маск попытался установить разумные ожидания для прототипа. Тесла
Все эти цитаты принадлежат Маску.
«Я хочу задать некоторые ожидания в отношении нашего робота Optimus… В прошлом году был просто человек в костюме робота, но мы прошли долгий путь, и по сравнению с этим, он будет очень впечатляющим. ”
Маску уже слишком поздно пытаться возлагать разумные надежды на этого робота (или на робототехническую программу Теслы в целом). Большинство робототехников знают лучше, чем использовать людей при формировании ожиданий от роботов-гуманоидов, потому что разочарование неизбежно.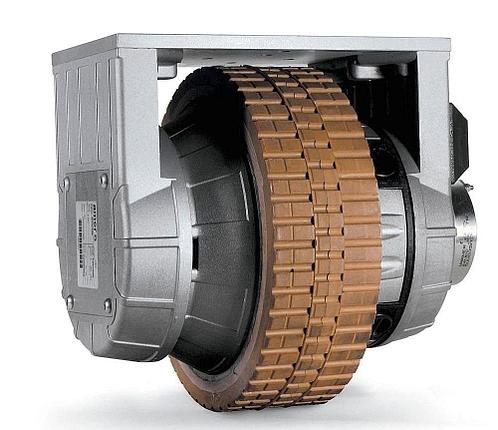 И попытка спасти его буквально в последнюю минуту, заявив, что «по сравнению с тем, чтобы вообще не иметь робота, наш робот будет очень впечатляющим», правда, ничего не исправит.
И попытка спасти его буквально в последнюю минуту, заявив, что «по сравнению с тем, чтобы вообще не иметь робота, наш робот будет очень впечатляющим», правда, ничего не исправит.
«Я думаю, что то, что мы делаем здесь, в Tesla, может внести значительный вклад в AGI».
Да, я не буду этого касаться.
Прямо перед тем, как робота вывели на сцену, один из инженеров дал понять, что это будет первый раз, когда робот будет ходить без привязи и без поддержки. Если это правда, то это безумие, потому что, черт возьми, вы должны ждать до этого момента , чтобы попробовать это? Я не особо впечатлен, просто запутался.
Для некоторого контекста того, что вы собираетесь увидеть, краткий отсыл к году назад в августе прошлого года, когда я предсказал, что будет в магазине на 2022 год:
Вполне возможно, даже вероятно, что Tesla построит своего рода Tesla Bot где-то в следующем году, как говорит Маск. Я думаю, что это будет не так уж похоже на концепт-изображения в этой презентации.
 Я думаю, что он сможет встать и, возможно, ходить. Может быть, выдержать один или два толчка и распознать и схватить объект. И я думаю, что после этого прогресс будет медленным. Но самое сложное не в том, чтобы построить робота, а в том, чтобы заставить его делать полезные вещи , и я думаю, что Маск здесь не в своей тарелке.
Я думаю, что он сможет встать и, возможно, ходить. Может быть, выдержать один или два толчка и распознать и схватить объект. И я думаю, что после этого прогресс будет медленным. Но самое сложное не в том, чтобы построить робота, а в том, чтобы заставить его делать полезные вещи , и я думаю, что Маск здесь не в своей тарелке. Демонстрация платформы для разработки ботов Tesla
Мне вспомнился DARPA Robotics Challenge 2015, потому что многие гуманоидные платформы выглядели так же, как выглядит бот Tesla. Я предполагаю, что с почти голым электромеханическим гуманоидом с точки зрения форм-фактора можно сделать не так много, но на первый взгляд в конструкции Теслы нет ничего особенно инновационного или футуристического. Во всяком случае, движение робота не совсем соответствует стандартам DRC, поскольку похоже, что у него будут проблемы с любым случайным контактом или даже с неровным полом (и Маск предположил, что это так).
На сцене робот делал очень мало. Он прошел успешно, но не очень динамично. «Движения», которые он совершал, вполне могли быть полностью запрограммированы, поэтому мы не знаем, в какой степени робот может балансировать самостоятельно. Я рад, что он не упал лицом вниз, но если бы он упал, я бы не удивился и не осудил его слишком строго.
Tesla показала видеоролики о том, как робот поливает растения, несет коробку и поднимает металлический стержень на заводе. Tesla
После очень короткой живой демонстрации Маск показал несколько видеоклипов, на которых прототип робота занимается другими делами (начиная с 19:30 в прямом эфире). Эти клипы включали в себя ходьбу робота, несущую коробку неопределенного веса и кладущую ее на стол, и сжимающую лейку. Лейка произвела некоторое впечатление, потому что ухватиться за эту узкую ручку выглядит сложно.
«Робот на самом деле может гораздо больше, чем мы только что показали. Мы просто не хотели, чтобы он упал лицом вниз».
Мы просто не хотели, чтобы он упал лицом вниз».
— Илон Маск
Однако, несмотря на добавленные кадры с датчиков робота, мы понятия не имеем, как это было сделано на самом деле; был ли он автономным или нет; или сколько попыток потребовалось, чтобы получить право. Также есть клип, в котором робот выбирает объект и пытается поместить его в корзину, но видео обрывается прямо перед тем, как размещение будет успешным. Это заставляет меня думать, что мы видим тщательно подобранные оптимальные сценарии производительности.
Это был наш грубый робот для разработки, использующий полустандартные приводы, но мы уже пошли дальше. На самом деле у нас есть бот Optimus с приводами, полностью разработанными Tesla, аккумулятором, системой управления и всем остальным — он был еще не совсем готов к работе, но мы хотели показать вам что-то, что довольно близко к тому, что будет запущено в производство.
Демо последнего поколения Tesla Bot
Это немного больше похоже на концепт, который Tesla продемонстрировала в прошлом году, хотя очевидно, что он менее функционален, чем другой прототип, который мы видели. Спроецировать возможности первого робота на второго робота заманчиво, но делать это было бы преждевременно.
Спроецировать возможности первого робота на второго робота заманчиво, но делать это было бы преждевременно.
Здесь вы видите Optimus со степенями свободы, которые мы ожидаем иметь в производственном блоке Optimus, а именно способность двигать всеми пальцами независимо и противопоставленными большими пальцами, так что он может работать с инструментами и делать полезные вещи. .
Как и в прошлом году, Маск намекает, что робот сможет работать с инструментами и делать полезные вещи, потому что у него есть необходимые степени свободы. Но, конечно же, аппаратное обеспечение — это только первый шаг к работе с инструментами и полезным вещам, а программное обеспечение, я бы сказал, намного сложнее и требует гораздо больше времени, и Tesla, похоже, едва начала работать над этой стороной вещей.
Наша цель — как можно быстрее создать полезного робота-гуманоида. Мы разработали его, используя ту же дисциплину, что и при проектировании автомобиля, то есть спроектировать его для производства, чтобы можно было производить робота в больших объемах с низкой стоимостью и высокой надежностью.
 Это невероятно важно… Оптимус разработан как чрезвычайно способный робот, но производится в очень больших объемах, в конечном счете, в миллионах единиц. И ожидается, что он будет стоить намного меньше, чем автомобиль — по моему мнению, намного меньше 20 000 долларов.
Это невероятно важно… Оптимус разработан как чрезвычайно способный робот, но производится в очень больших объемах, в конечном счете, в миллионах единиц. И ожидается, что он будет стоить намного меньше, чем автомобиль — по моему мнению, намного меньше 20 000 долларов. В целом я согласен с Маском в том, что исторически человекоподобные роботы не были рассчитаны на технологичность. Однако это меняется, и я думаю, что другие компании, вероятно, сейчас имеют преимущество перед Tesla в плане технологичности. Но вполне возможно, что Tesla сможет быстро наверстать упущенное, если они смогут каким-то образом использовать весь этот опыт автомобилестроения в создании роботов. Не факт, что это сработает таким образом, но это хорошая идея, потенциально большое преимущество.
Что касается объема производства и стоимости, я понятия не имею, что значит «ожидаемый». Эта строчка вызвала аплодисменты, но, насколько я понимаю, эти цифры на данный момент в основном бессмысленны.
Вы все видели очень впечатляющие демонстрации роботов-гуманоидов, и это здорово, но чего им не хватает? У них отсутствует мозг — у них нет разума, чтобы ориентироваться в мире самостоятельно.
Я не совсем уверен, на кого Маск бросает тень, но есть только пара компаний, которые, вероятно, могут претендовать на «очень впечатляющие демонстрации роботов-гуманоидов». И у этих компаний действительно есть роботы, которые в целом обладают таким интеллектом, который позволяет им ориентироваться по крайней мере в некоторой части мира самостоятельно, намного лучше, чем мы видели у Optimus на данный момент. Если Маск говорит, что эти роботы недостаточно автономны или осведомлены о мире, тогда ладно, но до сих пор Tesla не добилась большего, а для того, чтобы сделать лучше, потребуется много работы.
Команда проделала невероятную работу семь дней в неделю, чтобы попасть на сегодняшнюю демонстрацию. Я очень горжусь, и они действительно проделали отличную работу.

Хотя реальные достижения здесь были безжалостно омрачены шумихой вокруг них, это действительно поразительный объем работы, который нужно выполнить за такое короткое время, и команда роботов Tesla должна гордиться тем, чего они достигли. И хотя неизбежно будут сравнения с другими компаниями, разрабатывающими роботов-гуманоидов, здесь важно помнить контекст: Tesla добилась этого примерно за восемь месяцев. Это безумие.
Предстоит еще много работы по доработке и улучшению Оптимуса, и именно поэтому мы проводим это мероприятие — чтобы убедить некоторых из самых талантливых людей в мире присоединиться к Тесле и помочь воплотить ее в жизнь. , помогите реализовать его в масштабе, чтобы он мог помочь миллионам людей.
Я вижу привлекательность Tesla для тех, кто хочет начать карьеру в области робототехники, поскольку вы сможете работать на быстро развивающейся аппаратной платформе, опираясь на, как я могу только предположить, практически неограниченные ресурсы.
…Это означает будущее изобилия, будущее, в котором нет бедности, где вы можете иметь все, что хотите, в плане продуктов и услуг. Это действительно фундаментальная трансформация цивилизации, какой мы ее знаем.
Может быть, сначала заставить вашего робота надежно и недорого выполнять Единственную Полезную Вещь?
Три версии дизайна Optimus: Concept, Development Platform и Last Generation. Tesla
После этого Маск делает перерыв, и мы получаем конкретную актуальную информацию от ряда членов команды робототехники Tesla о последнем поколении Optimus.
Аппаратное обеспечение Optimus
- 28 степеней свободы
- 11 дополнительных степеней свободы в каждой руке
- Аккумуляторная батарея 2,3 кВтч 52 В, идеально подходит для работы на целый день
Вернемся к рукам , но эта батарея действительно выделяется тем, что может питать робота в течение всего дня. Опять же, мы должны отметить, что до тех пор, пока Тесла не продемонстрирует это, это не так уж важно, но Тесла знает чертовски много об энергосистемах и батареях, и я предполагаю, что они смогут это сделать.
Опять же, мы должны отметить, что до тех пор, пока Тесла не продемонстрирует это, это не так уж важно, но Тесла знает чертовски много об энергосистемах и батареях, и я предполагаю, что они смогут это сделать.
Tesla использует симуляции для проектирования конструкции робота, чтобы он мог получить минимальные повреждения после падения. Тесла
Я ценю, что Тесла очень рано думает о том, как сконструировать своего робота, чтобы он мог безопасно падать и снова подниматься с поверхностными повреждениями. Хотя, похоже, они не используют какие-либо защитные движения для смягчения последствий падения, что является активной областью исследований в других местах. И о чем в данном контексте не упоминается, так это о безопасности окружающих. Я рад, что робот не сильно пострадает при падении, но может ли Тесла сказать то же самое о тех, кто может стоять рядом с ним?
 ..»> Optimus будет использовать шесть различных приводов: три поворотных и три линейных. Tesla
..»> Optimus будет использовать шесть различных приводов: три поворотных и три линейных. Tesla
Индивидуальные приводы Tesla кажутся очень разумными. Ничего особенного, в частности, но Тесла должна делать свои собственные актуаторы, если ей нужно их много, что предположительно и будет. Я ожидаю, что они будут совершенно приличными, учитывая уровень механических знаний Теслы, но, насколько я могу судить, здесь нет ничего сумасшедшего маленького, дешевого, эффективного, мощного или чего-то в этом роде. И по этим слайдам и из презентации очень сложно сказать, насколько хорошо будут работать актуаторы, особенно для динамических движений. Программному обеспечению робота нужно многое наверстать в первую очередь.
Optimus будет иметь дизайн руки, вдохновленный биографией, с тросовыми приводами. Тесла
Каждая рука имеет шесть тросовых приводов для пальцев и большого пальца (с пружинами для обеспечения усилия открытия), которые Тесла выбрал для простоты и для минимизации количества деталей. Это, возможно, немного удивительно, поскольку кабельные приводы обычно не так долговечны и могут быть более требовательны к калибровке. Тесла говорит, что рука с пятью пальцами необходима, потому что Оптимус будет работать с человеческими инструментами в человеческой среде. И это, безусловно, одна точка зрения, хотя это большой компромисс в сложности. Рука предназначена для ношения 9мешок кг.
Это, возможно, немного удивительно, поскольку кабельные приводы обычно не так долговечны и могут быть более требовательны к калибровке. Тесла говорит, что рука с пятью пальцами необходима, потому что Оптимус будет работать с человеческими инструментами в человеческой среде. И это, безусловно, одна точка зрения, хотя это большой компромисс в сложности. Рука предназначена для ношения 9мешок кг.
Программное обеспечение Optimus
Tesla использует программные компоненты, разработанные для своих автомобилей, и переносит их в среду роботов. Тесла
Программное обеспечение! Следующая цитата принадлежит Милану Ковачу, члену команды автономии.
Все те классные вещи, которые мы показывали ранее в видеороликах, стали возможными всего за несколько месяцев благодаря потрясающей работе, которую мы проделали над автопилотом за последние несколько лет. Большинство этих компонентов довольно легко портируются в среду бота.
 Если подумать, мы просто переходим от робота на колесах к роботу на ногах. Некоторые компоненты аналогичны, а некоторые требуют более тяжелой работы.
Если подумать, мы просто переходим от робота на колесах к роботу на ногах. Некоторые компоненты аналогичны, а некоторые требуют более тяжелой работы. Я по-прежнему в корне не согласен с подразумеваемым утверждением, что «гуманоидные роботы — это просто машины с ногами», но впечатляет, что они вообще смогли многое перенести — я очень скептически относился к этому в прошлом году, но сейчас я настроен более оптимистично. , и возможность обобщать между платформами (на каком-то уровне) может иметь огромное значение как для Tesla, так и для автономных систем в целом. Хотелось бы больше подробностей о том, что было легко, а что нет.
Tesla показала, как датчики, используемые в ее автомобилях, могут помочь роботу Optimus ориентироваться. Тесла
То, что мы видим выше, является одной из причин моего скептицизма. Эта сетка присутствия (где датчики робота обнаруживают потенциальные препятствия) внизу очень похожа на автомобиль, поскольку приоритет состоит в том, чтобы абсолютно убедиться, что робот остается очень далеко от всего, с чем он может столкнуться.
Само по себе это плохо переносится на робота-гуманоида, которому необходимо напрямую взаимодействовать с объектами для выполнения полезных задач. Я уверен, что есть много способов адаптировать систему обхода препятствий автомобиля Tesla, но вот вопрос: насколько сложна такая передача, и лучше ли это, чем использование решения, разработанного специально для мобильных манипуляторов?
Tesla рассказала о проблемах динамической ходьбы гуманоидных роботов и своем подходе к планированию движений. Tesla
Следующая часть презентации была посвящена планированию движения и оценке состояния, которые, насколько я мог понять, были очень простыми. В основах нет ничего плохого, но немного странно, что Тесла потратил на это столько времени. Я думаю, это важный контекст для большинства людей, которые смотрят, но они как бы говорили об этом, как будто они сами открыли, как делать все это, что, я надеюсь, они не сделали, потому что опять же, очень, очень простые вещи, которые другие человекоподобные роботы делают уже очень давно.
Тесла принял традиционный подход к управлению движением, основанный на модели робота и оценке состояния. Тесла
Еще одна цитата от Милана Ковача:
В течение следующих нескольких недель мы собираемся сосредоточиться на реальном варианте использования на одном из наших заводов. Мы действительно собираемся попытаться зафиксировать это и сгладить все элементы, необходимые для развертывания этого продукта в реальном мире. Я почти уверен, что мы сможем сделать это в течение следующих нескольких месяцев или лет, сделать этот продукт реальностью и изменить всю экономику.
Игнорируя последнюю фразу об изменении всей экономики и, возможно, также игнорируя временные рамки, потому что «следующие несколько месяцев или лет» не имеют особого значения, стремление сделать бота Tesla полезным — еще одно существенное преимущество Tesla. В отличие от большинства компаний, работающих над роботами-гуманоидами, Tesla потенциально является крупнейшим клиентом для себя, по крайней мере, на начальном этапе, и наличие этих внутренних практических задач для обучения робота может действительно помочь ускорить разработку.
«Оптимус разработан, чтобы быть чрезвычайно способным роботом, но производится в очень больших количествах, в конечном счете, в миллионах единиц. И ожидается, что он будет стоить намного меньше, чем автомобиль — я думаю, намного меньше, чем 20 000 долларов».
— Маск
Однако мне трудно представить, что Тесла-бот мог бы на самом деле делать на фабрике, которая была бы исключительно полезной и не могла бы быть лучше негуманоидного робота. Мне очень интересно посмотреть, что придумает Тесла, и смогут ли они сделать это за месяцы (или годы). Я подозреваю, что это будет намного сложнее, чем они предполагают, особенно когда они доберутся до 9.0% от того, где они хотят быть, и начинают пытаться взломать последние 10%, которые необходимы для чего-то надежного.
Это был конец официальной презентации об Оптимусе, но в конце была сессия вопросов и ответов с Маском, где он дал дополнительную информацию о роботах. Он также дал дополнительную неинформативную информацию, которую стоит включить на тот случай, если вам еще недостаточно закатить глаза на один день.
Вопросы и ответы аудитории
Маск ожидает, что Optimus будет стоить меньше, чем автомобиль, «мне кажется, намного меньше 20 долларов», — сказал он. Тесла
Наша цель с Optimus — как можно быстрее получить максимально полезного робота. Существует множество способов решения различных проблем робота-гуманоида, и мы, вероятно, не обо всех технических решениях говорим правильно. Мы открыты для развития технических решений, которые вы видите здесь, с течением времени. Но нам нужно было что-то выбрать. Мы пытаемся следовать цели кратчайшего пути к полезному роботу, которого можно производить в больших количествах. И мы собираемся протестировать робота внутри нашей фабрики, чтобы увидеть, насколько он полезен, потому что вам нужно замкнуть петлю на реальность, чтобы подтвердить, что робот действительно полезен.
Это вариация идеи минимально жизнеспособного продукта, хотя она кажется больше с точки зрения создания универсального робота, что несколько расходится с чем-то минимально жизнеспособным. Хорошо, что Маск рассматривает аппаратное обеспечение как нечто постоянно меняющееся и что он сформулировал все в рамках плана массового производства. Это не единственный способ сделать это — вы можете сначала построить полезного робота, а затем выяснить, как сделать его дешевле, но подход Теслы может ускорить их производство. То есть, если они смогут подтвердить, что робот действительно полезен. Я до сих пор не уверен, что это произойдет, по крайней мере, в сроки, которые устроят Маска.
Хорошо, что Маск рассматривает аппаратное обеспечение как нечто постоянно меняющееся и что он сформулировал все в рамках плана массового производства. Это не единственный способ сделать это — вы можете сначала построить полезного робота, а затем выяснить, как сделать его дешевле, но подход Теслы может ускорить их производство. То есть, если они смогут подтвердить, что робот действительно полезен. Я до сих пор не уверен, что это произойдет, по крайней мере, в сроки, которые устроят Маска.
Думаю, нам нужны действительно забавные версии Оптимуса. Оптимус может быть утилитарным и выполнять задания, но он также может быть как другом и приятелем, и тусоваться с вами. Я уверен, что люди придумают отличное применение этому роботу. Как только вы разобрались с основным интеллектом и исполнительными механизмами, вы можете надеть на робота все виды костюмов.
В то время как Маск, кажется, в основном шутит здесь, все «это будет твой друг» на самом деле не очень хорошая перспектива для такого робота, на мой взгляд. Или возможно какой-то робот, если честно.
Или возможно какой-то робот, если честно.
Мы хотим, чтобы со временем Оптимус стал таким андроидом, которого вы видите в научной фантастике, как в «Звездном пути: Следующее поколение», как Дейта. Но, очевидно, мы могли бы запрограммировать робота, чтобы он был менее похожим на робота и более дружелюбным, и, очевидно, он мог бы научиться подражать людям и чувствовать себя очень естественно.
Менее похожий на робота и более дружелюбный, чем человек, притворяющийся роботом и пытающийся быть человеком? Удачи с этим.
Мы собираемся запустить Optimus с очень простых задач на фабрике, например, перенос детали из одного места в другое или загрузка детали в обычную роботизированную ячейку. Мы начнем с того, как сделать его вообще полезным, а затем постепенно расширим количество ситуаций, в которых оно будет полезно. Я думаю, что количество ситуаций, когда Оптимус будет полезен, будет расти в геометрической прогрессии.
Я думаю, более вероятно, что в краткосрочной и среднесрочной перспективе Tesla будет изо всех сил пытаться найти ситуации, в которых Optimus будет уникально полезен эффективным и экономичным способом.
Что касается того, когда люди смогут его заказать, думаю, это не так уж и далеко. Я не знаю, я бы сказал, в течение трех лет, возможно, не более пяти лет.
Ух. Может быть, в качестве исследовательской платформы?
Думаю, через пять лет Optimus станет невероятным. За 10 лет умопомрачительно. Мне очень интересно, как это произойдет, и я надеюсь, что вам тоже.
Несмотря на мой скептицизм по поводу временных рамок, пять лет — это долгий срок для любого робота, а десять лет — это практически вечность. Мне также очень интересно увидеть, как это происходит, хотя определения Маска о «невероятном» и «умопомрачительном» могут сильно отличаться от моих. Но мы увидим, не так ли?
Что дальше?
День искусственного интеллекта Tesla служит для компании мероприятием по набору персонала. «Предстоит еще много работы, чтобы доработать и улучшить Optimus, и именно поэтому мы проводим это мероприятие — чтобы убедить некоторых из самых талантливых людей в мире присоединиться к Tesla», — сказал Маск.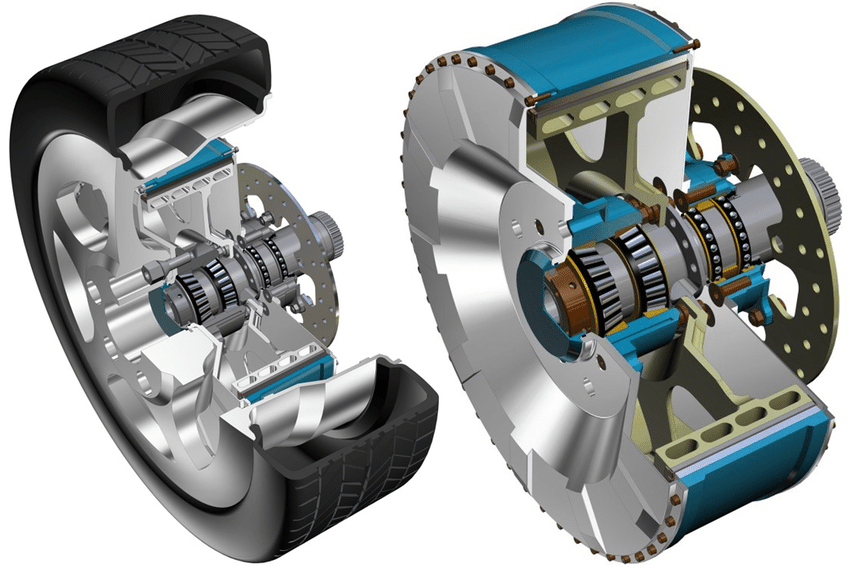 Tesla
Tesla
Я думаю, что Илон Маск теперь имеет несколько лучшее представление о том, что он делает с Tesla Bot. Чрезмерная шумиха все еще существует, но теперь, когда они действительно что-то построили, Маск, кажется, гораздо лучше представляет, насколько это сложно на самом деле.
Дальше все будет только сложнее.
Большая часть того, что мы видели в презентации, касалась аппаратного обеспечения. И аппаратное обеспечение важно и является необходимым первым шагом, но программное обеспечение, возможно, является гораздо более серьезной проблемой, когда речь идет о том, чтобы сделать робототехнику полезной в реальном мире. Понимание и взаимодействие с окружающей средой, рассуждения и принятие решений, способность учиться и обучаться новым задачам — все это необходимые части головоломки полезного робота, который пытается собрать Тесла, но все они также чрезвычайно важны. трудные, передовые проблемы, несмотря на огромный объем работы, проделанной над ними исследовательским сообществом.
И до сих пор у нас (все еще) очень мало указаний на то, что Тесла справится с этой задачей лучше, чем кто-либо другой. Похоже, что в Tesla нет ничего такого особенного или захватывающего, что обеспечило бы уникальную основу для видения Маска таким образом, который, вероятно, позволил бы им опередить другие компании, работающие над аналогичными вещами. Я повторю то, что сказал год назад: самое сложное — это не построить робота, а заставить этого робота делать полезные вещи .
«Я думаю, Оптимус будет невероятным через пять лет. За 10 лет умопомрачительно. Мне очень интересно, как это произойдет, и я надеюсь, что вам тоже».
—Маск
Могу, конечно, ошибаться. Тесла, вероятно, имеет больше ресурсов для решения этой проблемы, чем кто-либо другой. Возможно, автомобильное программное обеспечение будет переводиться намного лучше и быстрее, чем я думаю. На собственных заводах Tesla может быть целая куча простых, но ценных вариантов использования, которые обеспечат важные ступеньки для Optimus. Аккумулятор и производственный опыт Tesla могут оказать огромное влияние на доступность, надежность и успех робота. Их базовый подход к планированию и контролю может стать надежной основой, которая поможет системе быстрее развиваться. И команда, очевидно, очень талантлива и готова работать очень усердно, что может быть разницей между скромным успехом и медленным провалом.
Аккумулятор и производственный опыт Tesla могут оказать огромное влияние на доступность, надежность и успех робота. Их базовый подход к планированию и контролю может стать надежной основой, которая поможет системе быстрее развиваться. И команда, очевидно, очень талантлива и готова работать очень усердно, что может быть разницей между скромным успехом и медленным провалом.
Честно говоря, я бы хотел ошибиться. Мы только начинаем видеть некоторые реальные возможности коммерческих роботов с ногами и человекоподобных роботов. Есть много проблем, которые нужно решить, но также и большой потенциал, и успех Теслы будет огромным повышением доверия к коммерческим гуманоидам в целом. Мы также можем надеяться, что все ресурсы, которые Тесла вкладывает в Оптимуса, прямо или косвенно помогут другим людям, работающим над роботами-гуманоидами, если Тесла захочет поделиться частью того, что они узнали. Но на сегодняшний день все это только надежды, и Тесла должен воплотить это в жизнь.
Почему у электромобилей нет четырех двигателей в колесах?
Джон Кэри
13320 просмотров
электромобиль, электромобиль, электродвигатели в колесах
Электродвигатели в колесах или ступицах колес — идея не новая. Например, бензино-электрический гибрид Lohner-Porsche 1900 года приводился в движение электродвигателями, встроенными в ступицы его больших колес с надувными шинами.
Сегодня электродвигатели в колесах можно найти во многих электромобилях. Просто ни один из них не является серийным автомобилем или внедорожником. Колесные двигатели производства Bosch популярны в небольших электросамокатах, таких как китайская марка Niu. Втулочные двигатели с прямым приводом также довольно широко используются в электрических велосипедах.
ПОДРОБНЕЕ: Полный совет по электромобилям и часто задаваемые вопросы
ПОДРОБНЕЕ: Объяснение технологии электромобилей
Тем не менее, некоторые компании разрабатывают четырехколесные электромобили с двигателями в колесах.
Хотите получать последние новости и обзоры электромобилей на свой почтовый ящик? Подпишитесь на нашу еженедельную рассылку!
Компания Lordstown, США, кажется, ближе всего к производству. Основанный в 2018 году завод стартапа в Лордстауне, штат Огайо, был куплен у General Motors. GM также инвестировала в компанию 75 миллионов долларов США.
В электромобиле Lohner-Porsche 1901 года использовались электродвигатели в колесах
Завод в Лордстауне собирает предсерийные версии своей первой модели Endurance ute. Полномасштабное производство должно начаться в сентябре 2021 года, и компания заявляет, что у нее есть 100 000 (необязательных) предварительных заказов на большой пикап с двойной кабиной.
Хотя Lordstown производит моторы внутри каждого колеса Endurance, заслуга в их разработке принадлежит компании Elaphe. У этой словенской команды есть лицензионное соглашение с Lordstown.
Шасси пикапа Lordstown Endurance и его четыре электродвигателя в колесах
Endurance имеет «первую в мире полностью электрическую систему привода на колеса, созданную для работы», по словам энтузиастов с большой буквы в Лордстауне.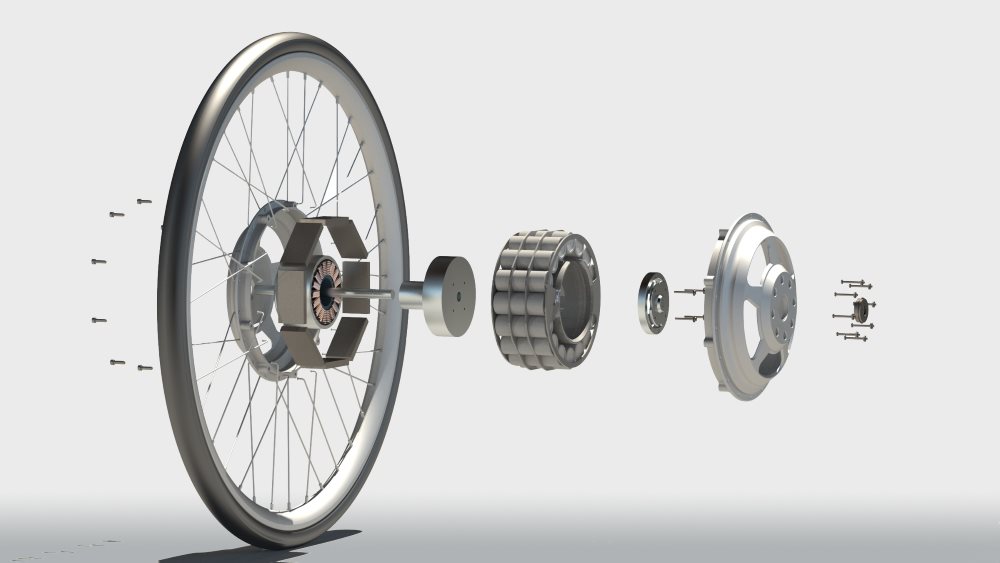 отдел маркетинга.
отдел маркетинга.
Lightyear One не похож на Lordstown Endurance, но у него также есть четыре мотора в колесах. Представленный в 2019 году, этот ультра-аэродинамический и очень дорогой пятиместный седан из Голландии планируется запустить в производство в конце этого года. Инженеры Lightyear, одержимые эффективностью, разработали двигатель, используемый в колесах One, с нуля.
Lightyear One электромобиль, в котором используются электродвигатели в колесах
И Lightyear, и Lordstown подчеркивают преимущества двигателей в колесах. По их словам, они простые, энергоэффективные и экономят место. Чего они не упоминают, так это того, что есть недостатки…
Стоимость — один из них. Четыре мотора в колесах будут дороже в производстве, чем один или два мотора на шасси.
Тогда есть практические проблемы. У колесных двигателей тяжелая жизнь. Они подвергаются тем же ударам и нагрузкам, что и само колесо. Как и пассажиры электромобиля, двигатели, установленные на шасси, защищены подвеской от неровностей и ударов, а дополнительная изоляция обеспечивается монтажными втулками.
Внутриколесные моторы также создают проблему, где разместить тормоза, которые обычно находятся внутри колеса. Хотя рекуперативное торможение может выполнять большую часть работы по замедлению электромобиля, по соображениям безопасности они также должны быть оснащены фрикционными тормозами.
Технология электродвигателей в колесах, разработанная Elpahe
Еще одна проблема заключается в том, что двигатели в колесах увеличивают то, что инженеры называют неподрессоренной массой. По сути, они увеличивают вес, который должен контролироваться амортизаторами системы подвески. Поэтому инженерам сложнее сделать так, чтобы электромобиль с моторами в колесах ехал плавно и хорошо управлялся.
А моторы в колесах, как правило, тяжелые штуки. Это немного усложняется, поэтому обратите внимание…
Выходной крутящий момент электродвигателя пропорционален объему его ротора. Не проблема обеспечить высокий крутящий момент, но мощность — другое дело. Проще говоря, мощность — это крутящий момент, умноженный на обороты двигателя, а двигатели в колесах не вращаются очень быстро. На скорости 100 км/ч колесо стандартного размера вращается со скоростью менее 1000 об/мин.
На скорости 100 км/ч колесо стандартного размера вращается со скоростью менее 1000 об/мин.
Схема, показывающая компоненты колесного электродвигателя, разработанного поставщиком компонентов Protean 9.0005 Эта неизбежная взаимосвязь означает, что моторам в колесах нужны большие роторы, чтобы вырабатывать достаточную мощность для обеспечения производительности, удовлетворяющей клиентов. Поскольку роторы изготавливаются в основном из магнитной стали, они тяжелые.
Существует альтернатива, и в настоящее время ее предпочитают все основные производители электромобилей…
Они выбирают двигатели меньшего размера, которые могут легко вращаться до скорости более 10 000 об/мин. Односкоростная коробка передач, в корпусе которой чуть больше двух шестерен, используется для умножения более низкого выходного крутящего момента. С дифференциалом двигатель может вращать два колеса. Даже с этими дополнительными компонентами установленный на шасси электродвигатель в сборе является удивительно компактным.
Технология колесных электродвигателей, разработанная Elpahe
Таким образом, хотя колесные двигатели могут сэкономить место, их преимущества не так очевидны, как может показаться на первый взгляд. Кроме того, необходимо принимать во внимание вопросы стоимости, защиты от ударов, упаковки тормозов и неподрессоренных масс.
Сложите все это, и нетрудно понять, почему у электромобилей нет двигателей в колесах. Возможно, Lordstown, Lightyear и другие изменят ситуацию, но маловероятно, что они изменят мнение производителей, использующих моторы на шасси с редукторами и дифференциалами.
Тех.
— Лордстаун Моторс
Технология
— Лордстаун Моторс
Полностью электрический
Общая стоимость
собственности
Путем перехода на более дешевый источник энергии и удаления всех
ненужные элементы бензиновых двигателей, всего
стоимость владения повышается.
Автомобиль внутреннего сгорания
Система полного привода
Меньше деталей =
Меньше поломок, меньше времени простоя
Лучше для вашей работы. Когда ты делаешь вещи
Когда ты делаешь вещи
простой, меньше вещей ломается. Меньше частей не
означают только более низкие затраты на техническое обслуживание, но
также меньше поломок и больше времени в дороге
быть продуктивным и предсказуемым.
Четыре мотора-втулки
Не все электромобили созданы
Равный
Мы используем платформу, на которую устанавливается двигатель
в каждом колесе. Мозги и мускулы в каждом колесе
сопровождая вас каждую милю на дороге.
Бортовой
Электродвигатель
и коробка передач
Электродвигатель
Внутриколесный двигатель
Двигатели
Внутриколесный двигатель
Что такое ступичный двигатель?
Втулочный двигатель представляет собой электродвигатель,
встроенный в ступицу колеса и
управляет им напрямую. Что делает ступичные двигатели
более эффективным? Меньше ненужного движения. Все
Все
выходная энергия идет непосредственно на колеса для
немедленное движение.
Интегрированное программное обеспечение
Интегрированное программное обеспечение контролирует и регулирует
каждое колесо каждую миллисекунду для оптимизации
производительность, диапазон и эффективность, в то время как
одновременный мониторинг аккумуляторной батареи
производительность. Наш Телематика
система предоставляет владельцам широкий спектр
данные для управления автопарком.
2023 All-Electric Endurance™
Технические характеристики
| КОРПУС | |
|---|---|
| Строительство/материалы | Сталь и алюминий |
| Тип кузова | Полноразмерный пикап с двойной кабиной |
| Трансмиссия/трансмиссия | |
| Компоновка трансмиссии | 4 мотор-колеса |
Заданная пиковая мощность (л. с./кВт) с./кВт) | 550 |
| Целевой пиковый крутящий момент (фунт-фут) | 4 800 |
| Максимальная скорость | 118 миль в час |
| Батарея/аккумулятор энергии | |
| Тип батареи | Литий-ионный и с жидкостным охлаждением |
| Емкость аккумулятора | 109 кВт-ч |
| Блок питания бортового зарядного устройства | 11 кВт |
| Целевое время зарядки | |
| Быстрая зарядка постоянным током | |
| 150 кВт DCFC от уровня заряда 20-80% | 30 минут |
| 50 кВт DCFC от уровня заряда 20-80% | 90 минут |
| Уровень 2 | |
| 32A Connected Charge Station от уровня заряда 20-80% | 9,5 часов |
| Экономия топлива | |
| Целевой показатель экономии топлива | 65 миль на галлон |
| Целевой диапазон, оцененный EPA | 200 миль |
| Внешние размеры (предварительная оценка) | |
| Колесная база | 146 в |
| Длина | 230 в |
| Ширина без зеркал | 84,55 в |
| Ширина с зеркалами | 94,12 в |
| Высота | 75 в |
| Поворотный круг | 47 футов |
| Ширина передней гусеницы | 68 в |
| Ширина задней колеи | 68 в |
| Длина подъемной платформы | 5 футов 8 дюймов |
| Объем подъемной платформы | 59,3 фута 3 |
| Объем переднего багажника | 9,6 футов 3 |
| Внутренние размеры (предварительная оценка) | |
| Сиденья (пассажиры) | 5 |
| Передний потолок | 40,86 дюйма |
| Переднее пространство для ног SAE (максимальное) | 41,11 в |
| Переднее плечо | 65,13 в |
| Переднее бедро | 60,86 в |
| Задний потолок | 39,69 в |
| Пространство для ног сзади SAE (максимальное) | 38,98 в |
| Задний плечевой отсек | 64,07 в |
| Заднее бедро | 60,20 дюйма |
| Рулевое управление и подвеска | |
| Передняя подвеска | Независимый |
| Задняя подвеска | Цельная ось |
| Рулевое управление | Рейка и шестерня |
| Тормоза | |
| АБС | АБС на 4 колеса |
| Тип | Диск на 4 колеса |
| Колеса и шины | |
| Колесо | 9J x 20 |
| Марка шины | Гудиер |
| Размер шины | 275/60R20 |
| Тип | Всесезонный |
| Прицеп и полезная нагрузка | |
| Снаряженная масса | 6400 фунтов |
| Распределение веса в снаряженном состоянии на передней оси | 50% |
| Максимальная полезная нагрузка | 1100 фунтов |
| Максимальная грузоподъемность при обычном прицепе | 8000 фунтов |
| Максимальная полная масса автомобиля | 7500 фунтов |
| Максимальная полная масса автомобиля | 15 000 фунтов |
| Зарядка | |
| Индикатор состояния зарядного порта | |
Возможность быстрой зарядки постоянным током Макс. 150 кВтч 150 кВтч | |
| Шасси | |
| TPMS (Контроль давления в шинах) Все шины | |
| Полноразмерная запасная шина (под кузовом грузовика) | |
| Домкрат/инструмент для запасного колеса | |
| Совместимость с цепями противоскольжения | |
| Подшипники колеса с низким сопротивлением | |
| Электрика — информационно-развлекательная система | |
| Микрофон для телефона Hands Free с формированием луча | |
| Кластерный экран — без аппаратных датчиков — без касания | |
| Экран центрального стека — сенсорное управление (диагональ 12,3 дюйма) | |
| Разъемы USB-C на передней части центральной консоли — с подсветкой, горизонтальные (для передних пассажиров) | |
| Разъемы USB-C на задней панели центральной консоли — с подсветкой, горизонтальные (для задних пассажиров) | |
| Инвертор 400 Вт 3,3 А для розеток 120 В | |
| Дополнительная розетка 120 В в грузовом отсеке | |
| Розетка 120 В на задней панели центральной консоли с подсветкой, горизонтальная | |
| Интернет-радио AM/FM | |
| Bluetooth/Handsfree Подключение мобильного телефона | |
| Внешний вид | |
| Центральный замок/отпирание всех дверей, включая заднюю дверь | |
| Переднее освещение тележки | |
| Угловые ступеньки Задние бамперы | |
| Электростеклоподъемники с электроприводом | |
| Камера заднего вида | |
| Задние крючки для крепления кровати (14–6 с каждой стороны, 2 спереди) | |
| Медленно открывающаяся задняя дверь | |
| Светодиодные фары | |
| Светодиодные задние фонари | |
| OSRVM (наружное зеркало заднего вида) — ручное складывание + регулировка мощности | |
| Интерьер | |
| Рулевая колонка с наклоном | |
| Сиденье водителя с механической регулировкой в 4 направлениях | |
| Ковшеобразное сиденье переднего пассажира с ручной регулировкой в 4 направлениях | |
| Складное многоместное сиденье 60/40 (3 пассажира) | |
| Хранение на заднем сиденье (под откидным сиденьем) | |
| Проводка к блоку предохранителей и разъем для дооснащения | |
| Внутренняя отделка | |
| Силовой агрегат/Тепловой | |
| Программное обеспечение, управляющее режимами максимальной скорости и ускорения (панель управления парком автомобилей) | |
| Регулируемый уровень рекуперативного торможения | |
| Полный привод | |
| Круиз-контроль | |
| Пуск с кнопки — без пассивного входа | |
| Автоматическая предварительная подготовка батареи | |
| Системы безопасности | |
| Подушки безопасности (6) (водителя, пассажира, со стороны сиденья водителя, со стороны пассажирского сиденья, левой боковой шторки, правой боковой шторки) | |
| Система помощи при превышении скорости (информация об ограничении скорости и контроль скорости) | |
| Интеллектуальная система безопасности при столкновении (отключение высокого напряжения, включение света, отпирание дверей) | |
| Электрическая система стояночного тормоза | |
| Система помощи при парковке | |
| Наружная/внутренняя отделка | |
| Белый электрик (стандарт) | |
| Сиденья черные | |
| Отделка (двери, IP, обивка потолка) — темная (черная/серая) Функции помощи при парковке | |
| Гарантия | |
| База: 36 месяцев / 36 000 миль | |
| Аккумулятор/двигатель: 96 месяцев / 100 000 миль | |
| Коррозия: 60 месяцев / неограниченное количество миль | |
| Краска (химическая пятнистость): 12 месяцев / 12 000 миль | |
| Помощь на дороге: 36 месяцев / 36 000 миль | |
* Спецификации, изложенные в данном документе, могут быть изменены во всех отношениях по собственному усмотрению Lordstown Motors и не являются заявлением или гарантией Lordstown Motors.
Спасибо!
Вы успешно подписались на нашу рассылку.
Поговорим о внутриколесных двигателях
- Peter Leijnen
- Блог
внутри колеса: система двигателя в колесе. Мы должны признать, что когда электродвигатели интегрированы в колеса, появляется впечатляющее количество нового пространства. И, конечно же, эти так называемые мотор-колеса или мотор-колеса имеют определенные преимущества, но они также создают некоторые проблемы.
Размер двигателя и стоимость
Моторы в колесах не новы. В начале 20-го века в первом гибридном автомобиле Фердинанда Порше использовались электродвигатели, установленные на ступицах, на каждом колесе. Эти двигатели приводят в движение колесо напрямую. Нет необходимости в коробке передач или карданном вале. При использовании редуктора скорость снижается, а крутящий момент увеличивается. Но с мотором в колесе снижения нет. Скорость вращения колеса равна скорости двигателя, поэтому требуемый крутящий момент и мощность должны передаваться в режиме прямого привода. Каковы последствия этого? Поскольку крутящий момент двигателя напрямую зависит от размера двигателя, а умножения крутящего момента нет (поскольку нет коробки передач), размер двигателя должен быть больше, чтобы достичь требуемой производительности. Это также оказывает значительное влияние на стоимость, поскольку уровень создания крутящего момента напрямую зависит от количества необходимого материала постоянного магнита. Особенно с 4 колесами (и, следовательно, с 4 двигателями) стоимость трансмиссии значительно возрастает.
Но с мотором в колесе снижения нет. Скорость вращения колеса равна скорости двигателя, поэтому требуемый крутящий момент и мощность должны передаваться в режиме прямого привода. Каковы последствия этого? Поскольку крутящий момент двигателя напрямую зависит от размера двигателя, а умножения крутящего момента нет (поскольку нет коробки передач), размер двигателя должен быть больше, чтобы достичь требуемой производительности. Это также оказывает значительное влияние на стоимость, поскольку уровень создания крутящего момента напрямую зависит от количества необходимого материала постоянного магнита. Особенно с 4 колесами (и, следовательно, с 4 двигателями) стоимость трансмиссии значительно возрастает.
Долговечность
Мотор-колеса подвергаются прямому воздействию пыли, соли, воды и других жидкостей, а также вибрации и ударам, что сокращает срок их службы. Это одна из основных причин, по которой Ford в конце концов решил отказаться от концепций колесных двигателей, над которыми они работали, для нового электрического F-150.
Не так много данных о практической долговечности колесных двигателей в транспортных средствах, просто потому, что их не так много в эксплуатации. Но для большинства вариантов использования мы можем ожидать, что моторы в колесах далеки от идеального решения.
Динамика автомобиля
Важным аспектом динамики автомобиля является «неподрессоренная масса». Увеличение массы колеса снижает комфорт при вождении. Почему это? Неподрессоренная масса не поддерживается подвеской автомобиля. Таким образом, снижение неподрессоренной массы является ключом к улучшению управляемости. Чем ниже неподрессоренная масса, тем легче амортизаторам и пружинам удерживать шины в контакте с дорогой на неровной поверхности. Многие проблемы, если не все, вызваны инерцией. Большая масса означает более высокую инерцию. А более высокая инерция означает большую нагрузку на амортизаторы и пружины. Если неподрессоренные компоненты имеют большую массу, их труднее ускорять/замедлять, что затрудняет поддержание постоянной нагрузки подвески на шину.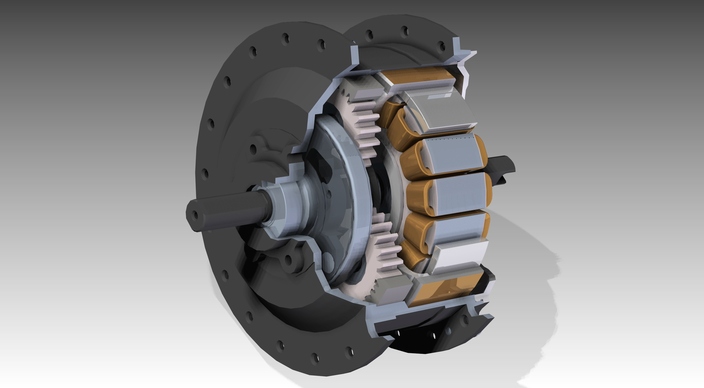
Постоянный контакт шины с дорогой необходим для управляемости и безопасности. Вот почему производители автомобилей обычно делают все возможное, чтобы сделать колеса максимально легкими, чтобы обеспечить оптимальную производительность.
Мотор-колеса напрямую увеличивают неподрессоренную массу автомобиля, поскольку они расположены «перед» подвеской при трогании с места. Эта проблема серьезно усугубляется тем фактом, что моторы в колесах, как правило, имеют прямой привод и, следовательно, тяжелее, чем их бортовые аналоги.
Силовой агрегат на колесах обычно реализуется как система полного привода. Привод на четыре колеса положительно влияет на ходовые качества автомобиля. С полным приводом сцепление с дорогой лучше. Система распределения крутящего момента обеспечивает оптимальное сцепление каждого колеса в любой ситуации. Это повышает безопасность, ускорение и управляемость. Тем не менее, 4WD также может быть реализован с бортовыми двигателями (как это делают большинство электрических «мощных» автомобилей в наши дни), так что это ни в коей мере не является преимуществом для двигателей в колесах. То же самое касается способа рекуперации энергии при рекуперативном торможении: в этом отношении внутриколесные двигатели не дают никаких преимуществ перед бортовыми двигателями.
То же самое касается способа рекуперации энергии при рекуперативном торможении: в этом отношении внутриколесные двигатели не дают никаких преимуществ перед бортовыми двигателями.
Эффективность
Моторы в колесах всегда будут больше страдать от потерь холостого хода и потерь при частичной нагрузке, потому что двигатели нельзя отсоединить от колес. Существует тенденция к установке большего количества двигателей в транспортном средстве, и то, что мы видим, например, с Porsche Taycan, заключается в том, что задние двигатели отделяются от колес при движении на скорости по шоссе, чтобы оптимизировать эффективность трансмиссии. Это очень сложно реализовать с моторами в колесах. Они всегда вращаются вместе с колесами, даже если не используются активно.
Некоторые компании заявляют, что эффективность колесных двигателей выше из-за отсутствия коробки передач. Хотя коробка передач всегда немного неэффективна, 1- или 2-ступенчатые коробки передач, которые обычно используются для электромобилей, намного эффективнее, чем сложные многоступенчатые трансмиссии, используемые в силовых агрегатах с двигателями внутреннего сгорания. Мы наблюдаем потерю эффективности коробки передач на 1 или, может быть, 2 процента. Однако эта потеря эффективности компенсируется тем фактом, что благодаря коробке передач электродвигатель может работать в своей наиболее эффективной рабочей зоне, что приводит к увеличению запаса хода транспортного средства по сравнению с системой прямого привода в зависимости от вариант использования и ездовой цикл.
Мы наблюдаем потерю эффективности коробки передач на 1 или, может быть, 2 процента. Однако эта потеря эффективности компенсируется тем фактом, что благодаря коробке передач электродвигатель может работать в своей наиболее эффективной рабочей зоне, что приводит к увеличению запаса хода транспортного средства по сравнению с системой прямого привода в зависимости от вариант использования и ездовой цикл.
Платформы для скейтборда и модули для поворотов
В последних тенденциях платформ для скейтборда мы видим 3 различных варианта установки:
- централизованные внутренние двигатели (например, Canoo),
- двигатели, расположенные близко к колесу (но не в колесе). (например, REE) и
- мотор-колеса (например, Lightyear)
Установка двигателей ближе к колесу ставит новые инженерные задачи. Возьмем пример с торможением. Все электромобили используют ту или иную форму рекуперативного торможения, что очень полезно для эффективности. Но не все торможения можно выполнять только с помощью рекуперативного торможения, например.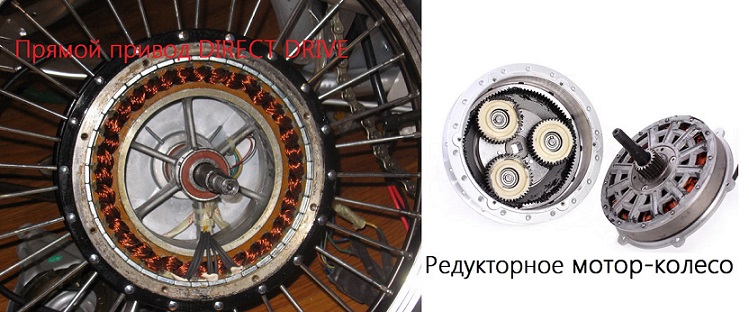 для экстренной остановки. Это означает, что фрикционные тормоза по-прежнему необходимы, а в двигателях колес остается очень мало места для их установки. В результате охлаждение тормозов становится проблемой.
для экстренной остановки. Это означает, что фрикционные тормоза по-прежнему необходимы, а в двигателях колес остается очень мало места для их установки. В результате охлаждение тормозов становится проблемой.
В каких случаях целесообразно использовать конфигурации «в колесе» или «рядом с колесом»?
Новые конфигурации, такие как «в колесе» и «рядом с колесом», имеют свои преимущества. Эти новые платформы могут стать достойной альтернативой, особенно в тех случаях, когда место для аккумуляторной батареи имеет важное значение, модульность является ключевым фактором, а транспортное средство будет двигаться по гладким, плоским поверхностям.
Примером могут служить небольшие коммерческие автомобили, которые передвигаются с относительно низкой скоростью и по гладким поверхностям, таким как городские районы. В сочетании с платформой электромобиля в стиле скейтборда, где все механические части встроены в платформу, эта компоновка максимально увеличивает доступное полезное пространство.
Интеграция
В компании Traxial мы верим в необходимость установки нескольких двигателей на транспортное средство, особенно при использовании преимуществ размеров двигателей с осевым магнитным потоком. Комбинация двигателя с осевым потоком с 1- или 2-ступенчатой коробкой передач является очень практичным решением даже при использовании 1, 2, 3 или 4 электродвигателей на одном транспортном средстве.
Заключение
За последние 20 лет появилось много концептов и демонстраторов, но ни один пассажирский автомобиль не производится серийно с мотор-колесами (пока). На данный момент мы можем сказать, что Ford был прав, отказавшись от колесных двигателей для своего пикапа F-150. Глядя на вариант их использования, стационарные двигатели имеют больше смысла, поскольку они обеспечивают лучшую динамику автомобиля и долговечность, поскольку двигатели находятся внутри кузова автомобиля и защищены от окружающей среды. Кроме того, это более энергоэффективное решение, поскольку при необходимости один или несколько двигателей можно разъединить. В большинстве вариантов использования наземной электромобили больше всего выигрывают бортовые двигатели. Для некоторых конкретных случаев использования имеет смысл использовать либо колесные, либо угловые модули. Но для большинства применений трансмиссия, сочетающая 1- или 2-скоростную коробку передач с осевым магнитным двигателем без ярма Traxial, обеспечит превосходную эффективность при минимально возможном размере.
В большинстве вариантов использования наземной электромобили больше всего выигрывают бортовые двигатели. Для некоторых конкретных случаев использования имеет смысл использовать либо колесные, либо угловые модули. Но для большинства применений трансмиссия, сочетающая 1- или 2-скоростную коробку передач с осевым магнитным двигателем без ярма Traxial, обеспечит превосходную эффективность при минимально возможном размере.
Свяжитесь с нашим отделом продаж, чтобы узнать о возможностях интеграции осевых двигателей Traxial без ярма в ваши следующие транспортные средства.
Motor Technology
Изготовление корпусов для колесных двигателей
IWM предлагает множество преимуществ в плане упаковки, динамики транспортного средства, безопасности и потенциально более низкой стоимости, среди прочего, для городских маршрутных и транспортных средств доставки. (Протеан Электрик)
2021-07-29
Крис Боррони-Берд
IWM
могут повысить эффективность, динамику, безопасность и технологичность электромобилей, если в их конструкции учтена неподрессоренная масса.
Посмотреть галерею »
Ходовые качества, управляемость, звук и общий характер автомобиля с двигателем внутреннего сгорания во многом зависят от двигателя. Некоторые считают, что электромобили (EV), приводимые в движение электродвигателями без звука впуска или выхлопа, с меньшим количеством передач и NVH, ограничивают возможность дифференциации транспортных средств. Они утверждают, что трансмиссия станет товаром и что конкурентное преимущество необходимо будет достигать за счет других областей, таких как стиль и информационно-развлекательная система.
Я утверждаю, что исключением из этой точки зрения является двигатель в колесе (IWM), технология, которая позволяет значительно улучшить эффективность движения, динамику движения, активную безопасность и дизайн автомобиля. IWM позволяют работать в режиме «включи-в-одном», что актуально для плотной городской среды и безопасного въезда/выезда транспортных средств с тротуара. Более того, IWM может продолжить революцию, начатую ныне повсеместно распространенной архитектурой «скейтборда» электромобилей, в том, как автомобили разрабатываются, производятся и обслуживаются.
Более того, IWM может продолжить революцию, начатую ныне повсеместно распространенной архитектурой «скейтборда» электромобилей, в том, как автомобили разрабатываются, производятся и обслуживаются.
IWM все чаще разрабатываются и тестируются OEM-производителями и поставщиками как часть углового модуля. Все большее число сторонников в сообществе мобильных инженеров считают, что они являются неизбежным решением для будущих электромобилей. Поэтому полезно понять, что до сих пор мешало коммерциализации IWM, начиная с часто упоминаемой проблемы: неподрессоренной массы.
Проблемы и барьеры
IWM может быть интегрирован в транспортное средство различными способами и в одном из вариантов, как показано на прилагаемых изображениях. Это наглядно иллюстрирует, как IWM могут увеличивать неподрессоренную массу — компоненты между системой подвески и дорожным покрытием, включая колеса, шины, тормоза и части самой системы подвески.
С точки зрения динамики транспортного средства полезно рассматривать массу транспортного средства как комбинацию подрессоренной и неподрессоренной масс. Основной режим резонанса автомобиля (~ 1 Гц) в основном вызван ударами подрессоренной массы автомобиля о систему подвески. Однако неподрессоренная масса отрицательно влияет на комфортность езды, поскольку создает более выраженную вторичную резонансную моду (~ 7–10 Гц из-за ее инерционного запаздывания, отскакивающего от шины). Это также затрудняет управление, потому что подвеска должна работать сильнее, чтобы удерживать шины в контакте с землей.
Основной режим резонанса автомобиля (~ 1 Гц) в основном вызван ударами подрессоренной массы автомобиля о систему подвески. Однако неподрессоренная масса отрицательно влияет на комфортность езды, поскольку создает более выраженную вторичную резонансную моду (~ 7–10 Гц из-за ее инерционного запаздывания, отскакивающего от шины). Это также затрудняет управление, потому что подвеска должна работать сильнее, чтобы удерживать шины в контакте с землей.
IWM на каждом углу могут удвоить неподрессоренную массу автомобиля. Но последствия можно смягчить, настроив амортизаторы подвески и усилив конструкцию амортизаторов (чтобы справляться с возросшими нагрузками на конструкцию кузова). Более того, ухудшение плавности хода менее заметно для некоторых типов транспортных средств, таких как грузовики и внедорожники, которые имеют более высокое отношение подрессоренной и неподрессоренной масс (которое определяет величину этого вторичного резонанса). Ожидания пассажиров в отношении комфорта при езде также могут быть менее требовательными к этим автомобилям.
В 2010 году Lotus Engineering модифицировала Ford Focus 2007 года, добавив 30 кг на каждое колесо, чтобы имитировать эффект добавления неподрессоренной массы Protean IWM. Данные сравнения характеристик плавности хода и управляемости до и после модификации показали, что увеличение неподрессоренной массы можно решить с помощью типичных методов оптимизации плавности хода и управляемости.
Другие проблемы, связанные с IWM, включают долговечность, управление температурным режимом и электрическую безопасность. Хотя серийного автомобильного IWM еще нет, деятельность по разработке расширяется. Значительный пробег накапливается в лаборатории и на тестовых автомобилях. Уроки, извлеченные из этих испытаний, были использованы для повышения долговечности за счет обеспечения надлежащей гидроизоляции (и электрической изоляции) и коррозионной стойкости.
Защита от дорожного мусора также имеет решающее значение для открытых силовых кабелей и линий охлаждения. Жидкостное охлаждение требуется для защиты IWM от чрезмерного нагрева, который усугубляется близостью к лучистому теплу тормозного ротора в наихудших условиях (например, отсутствие рекуперативного торможения, экстремально жаркая погода, двигатели, покрытые грязью). С точки зрения электробезопасности отказ одного IWM должен вызвать отключение в течение миллисекунд двигателя другой стороны, чтобы предотвратить неблагоприятное управление крутящим моментом; потеря общей мощности может привести к снижению скорости, но это может быть заметно только в условиях высокой нагрузки. Хотя IWM создают новые проблемы для интеграции транспортных средств, за последние 20 лет было проведено достаточно проектирования, разработок и испытаний, чтобы обеспечить прочную основу для их рассмотрения при производстве транспортных средств.
С точки зрения электробезопасности отказ одного IWM должен вызвать отключение в течение миллисекунд двигателя другой стороны, чтобы предотвратить неблагоприятное управление крутящим моментом; потеря общей мощности может привести к снижению скорости, но это может быть заметно только в условиях высокой нагрузки. Хотя IWM создают новые проблемы для интеграции транспортных средств, за последние 20 лет было проведено достаточно проектирования, разработок и испытаний, чтобы обеспечить прочную основу для их рассмотрения при производстве транспортных средств.
Помимо технических соображений, внедрению IWM препятствовало несколько других факторов. Например, электромобили только сейчас приближаются к конкурентоспособности по стоимости с автомобилями с двигателями внутреннего сгорания, поэтому было мало стимулов для изучения IWM. Однако даже когда электромобили становятся привлекательными с финансовой точки зрения, отдельные силосы, шасси, безопасность и дизайн большинства организаций, занимающихся разработкой продуктов, затрудняют продвижение такой технологии, как IWM, которая предлагает преимущества для всего транспортного средства. Например, стоимость IWM, вероятно, выше, чем для более традиционной электрической силовой установки, но на уровне транспортного средства стоимость IWM может быть привлекательной. Однако, поскольку выбор силовой установки обычно осуществляется организациями, занимающимися разработкой силовых агрегатов, всесторонний анализ на уровне транспортного средства может не рассматриваться.
Например, стоимость IWM, вероятно, выше, чем для более традиционной электрической силовой установки, но на уровне транспортного средства стоимость IWM может быть привлекательной. Однако, поскольку выбор силовой установки обычно осуществляется организациями, занимающимися разработкой силовых агрегатов, всесторонний анализ на уровне транспортного средства может не рассматриваться.
Ближайшие и долгосрочные преимущества
Возможно, лучшим автомобильным приложением IWM в краткосрочной перспективе является сегмент полноразмерных внедорожников или пикапов, где желателен низкий крутящий момент, а требования к комфорту езды, управляемости и скорости менее требовательны. чем для автомобилей. Lordstown Motors электрифицирует каждый угол электрического пикапа Endurance с помощью IWM, разработанных Elaphe, что делает его первой коммерциализацией IWM в любом автомобильном приложении — если Endurance будет запущен, как и планировалось, в конце 2021 года.
Существуют различные способы включения полного привода для этой платформы. IWM увеличивают массу двигателя автомобиля и требуют дополнительных высоковольтных кабелей и нескольких инверторов (по сравнению с конфигурацией с одним или двумя двигателями, предлагающей полный привод), а также усиления конструкции автомобиля для компенсации более высоких ударных нагрузок. Однако, поскольку масса деталей, не требуемых IWM (трансмиссия, карданный вал, раздаточная коробка, дифференциал, задний мост, полуоси), может превышать 250 кг (551 фунт), результирующий баланс масс может быть благоприятным для IWM по сравнению с альтернативным электронным приводом. конфигурации.
IWM увеличивают массу двигателя автомобиля и требуют дополнительных высоковольтных кабелей и нескольких инверторов (по сравнению с конфигурацией с одним или двумя двигателями, предлагающей полный привод), а также усиления конструкции автомобиля для компенсации более высоких ударных нагрузок. Однако, поскольку масса деталей, не требуемых IWM (трансмиссия, карданный вал, раздаточная коробка, дифференциал, задний мост, полуоси), может превышать 250 кг (551 фунт), результирующий баланс масс может быть благоприятным для IWM по сравнению с альтернативным электронным приводом. конфигурации.
Сравнение массы становится еще более благоприятным для IWM, если учитывать их более высокую эффективность. За счет исключения трансмиссии IWM с прямым приводом может быть на несколько процентов более эффективным в типичных условиях вождения. Это может привести либо к увеличению радиуса действия, либо к использованию более легкой батареи для того же диапазона. Для низкоскоростных городских транспортных средств высокая эффективность IWM и распределенная мощность на каждом углу могут привести к более легкому решению с воздушным охлаждением.
Этот же тип анализа также необходимо провести для стоимости на уровне транспортного средства. Хотя четыре IWM и связанная с ними силовая электроника будут стоить больше, чем решения с одним или двумя двигателями, на уровне транспортного средства общее уравнение стоимости может быть благоприятным для IWM, если учитывать отказ от компонентов трансмиссии и снижение требований к энергии батареи.
Для клиента более очевидными преимуществами IWM могут быть динамические характеристики автомобиля и конструктивные особенности автомобиля. По сравнению с 200–300 мс, необходимыми для раскручивания компонентов воздухозаборника, двигателя и трансмиссии, IWM может прикладывать крутящий момент почти мгновенно и более точно, чтобы при торможении был меньший тангаж и меньше крен при прохождении поворотов. Устранение переднего тягового двигателя с центральным расположением может обеспечить больший «багажник» (передний багажник). Отсутствие задней оси дает возможность опустить кузов пикапа или пол багажника внедорожника для облегчения погрузки/разгрузки; также возможна погрузочная площадка, охватывающая всю длину транспортного средства. Отсутствие несжимаемого оборудования двигателя на пути нагрузки можно использовать для управления ударными нагрузками на конструкцию и потенциального повышения пассивной безопасности.
Отсутствие несжимаемого оборудования двигателя на пути нагрузки можно использовать для управления ударными нагрузками на конструкцию и потенциального повышения пассивной безопасности.
Некоторые будущие тенденции мобильности благоприятны для IWM. Расширение владения парком транспортных средств общего пользования и доставки товаров будет определять решения, основанные на стоимости жизненного цикла; устранение коробок передач и карданных валов может повысить надежность автомобилей с приводом от IWM. Городская мобильность, где генерируется большая часть пройденных транспортных средств в мире (VMT), будет придавать большее значение компактности транспортных средств: IWM могут позволить более короткие автомобили, которые по-прежнему предлагают то же место для пассажиров и аккумуляторов. Они также могут обеспечить соответствующую городскую производительность, даже предлагая 90-градусный боковой сдвиг, что значительно повышает удобство парковки.
Для операторов роботакси, которым необходимо обслуживать и хранить транспортные средства в ночное время, улучшенная возможность парковки преобразуется в более низкие затраты на недвижимость (часто в дорогих городах), а также в более быстрое время посадки и высадки пассажиров, что приводит к увеличению числа оплачиваемых поездок в день и повышению прибыльности. . Более плавное движение, обеспечиваемое IWM, может снизить риск укачивания в автономных транспортных средствах и риск повреждения груза в транспортных средствах доставки. Более низкий пол грузового отсека не только упрощает погрузку/разгрузку, но и может облегчить посадку/высадку стареющего населения и пользователей инвалидных колясок. Центры без автомобилей, предлагаемые несколькими европейскими городами, могли бы стимулировать новые дверные системы, такие как вход спереди с требованием низкой высоты и пола.
. Более плавное движение, обеспечиваемое IWM, может снизить риск укачивания в автономных транспортных средствах и риск повреждения груза в транспортных средствах доставки. Более низкий пол грузового отсека не только упрощает погрузку/разгрузку, но и может облегчить посадку/высадку стареющего населения и пользователей инвалидных колясок. Центры без автомобилей, предлагаемые несколькими европейскими городами, могли бы стимулировать новые дверные системы, такие как вход спереди с требованием низкой высоты и пола.
IWM разрабатываются различными компаниями (см. таблицу). Растущий список включает в себя разработчиков IWM «чистой игры», таких как Protean и Elaphe, которые совершенствуют свои проекты более десяти лет, а также несколько поставщиков автомобилей. Некоторые из них объявили о производстве и продемонстрировали концепты автомобилей IWM, поскольку они рассматривают IWM как естественное продолжение своего текущего бизнеса. Кроме того, начинающие разработчики «скейтбордов» для электромобилей интегрируют угловые модули колесных двигателей в то, что, по их мнению, является лучшим решением для платформы электромобилей «с нуля».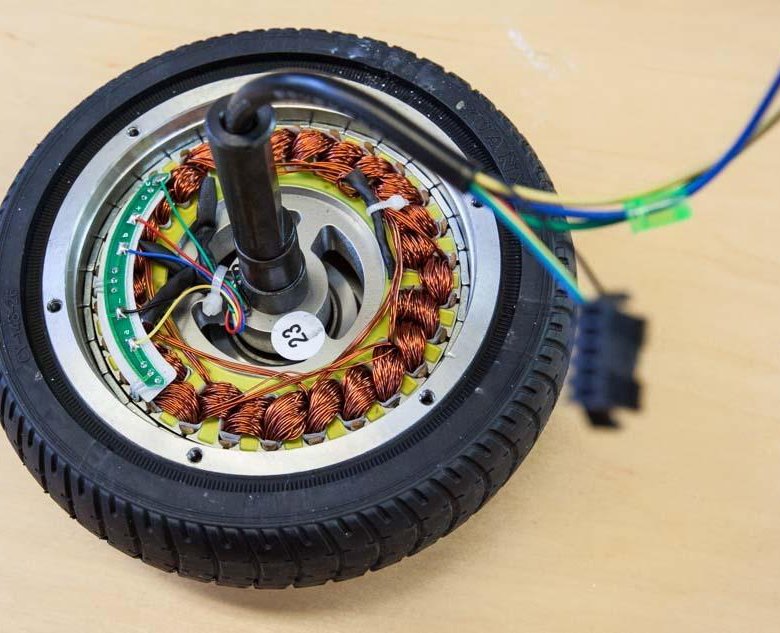 В ближайшем будущем можно ожидать новых технологических разработок и бизнес-объявлений.
В ближайшем будущем можно ожидать новых технологических разработок и бизнес-объявлений.
Новый подход к разработке транспортных средств
IWM будут не только формировать форму и функции будущих транспортных средств. Как и в случае с архитектурой скейтборда, они будут влиять на то, как автопроизводители разрабатывают портфель продуктов и как автомобили будут производиться и обслуживаться. Поставщик уровня 1 компания Schaeffler представила полный портфель автомобилей с приводом от IWM.
Независимые угловые модули, которые объединяют тормоза, рулевое управление, подвеску и движение с колесом и шиной в сборе, могут упростить разработку более широкого спектра транспортных средств на одной и той же архитектуре, поскольку становится легче изменить как гусеницу, так и колесную базу. Это также может привести к философии «подключи и работай», когда весь модуль «прикручивается» к скейтборду на сборочной линии и быстро заменяется при необходимости ремонта. Вполне возможно, что масштабируемый модуль (с настройкой мощности и крутящего момента) может поддерживать весь портфель транспортных средств, тем более что программное обеспечение все чаще будет основным методом дифференциации транспортных средств.
Постоянное совершенствование силовой электроники, уплотнений, подшипников и плотности крутящего момента приблизило IWM к состоянию готовности к производству. В сочетании с будущими тенденциями в области мобильности будущее IWM выглядит многообещающе, поскольку оно революционизирует проектирование, разработку, производство и обслуживание автомобилей.
Доктор Крис Боррони-Берд является соавтором книги «Изобретение автомобиля заново: личная городская мобильность для 21 века » совместно с доктором Ларри Бернсом и покойным профессором Биллом Митчеллом (MIT Press, 2010). Он руководил передовой автомобильной деятельностью в Chrysler, GM, Qualcomm и Waymo, включая разработку нескольких концепций IWM в GM, включая Autonomy 2002 года (первая концепция «скейтборда») и EN-V 2010 года. Он имеет 50 патентов, многие из которых связаны с концепцией платформы GM Autonomy «скейтборд», и является основателем Afreecar LLC, где он консультирует по вопросам мобильности будущего и создает новое решение для электронных комплектов для развивающихся стран.
Продолжить чтение »
Мотор-колесо Elaphe L1500 — E-Mobility Engineering
Мотор-колёс L1500 применяется, в частности, в спортивных автомобилях (вверху), пикапах, внедорожниках и городских транспортных средствах (справа), среди прочего
(Изображения любезно предоставлено компанией Elaphe Propulsion Technologies)
Пригоден для эксплуатации
L1500 был разработан для использования в широком диапазоне электромобилей и гибридных автомобилей OEM. Рори Джексон рассказывает о том, как он был разработан.
Словенская компания Elaphe известна в индустрии электромобилей своей технологией привода на колесах, которая используется в ряде автомобильных приложений по всему миру. Основанная в 2006 году физиками-теоретиками Андреем Детелой и Гораздом Лампиком (ныне генеральным директором), ее системы включают в себя множество запатентованных и собственных технологий в области механики, электромагнетизма и других дисциплин.
На вершине линейки колесных движителей Elaphe находится L1500, трехфазный синхронный двигатель переменного тока с радиальным потоком, весом 33,3 кг и радиусом 23,2 см (и, следовательно, соответствующий стандарту 19в ободке) и осевой длиной 14,22 см. При номинальном входном напряжении 370 В его максимальная выходная мощность составляет 113,6 кВт (при частоте вращения 1480 об/мин), а также максимальный испытанный крутящий момент 1500 Нм.
Представленный в 2019 году дизайн L1500 на ранних этапах разработки был основан на M700. M700 был первым двигателем Elaphe, полностью проверенным в соответствии с существующими автомобильными стандартами, и оба двигателя имеют некоторые архитектурные сходства.
Elaphe объединяет (слева направо) стандартные шины с 19в ободах, корпусе L1500 (и роторе), его статоре, стандартных автомобильных тормозах и стандартном подшипнике, для крепления к поворотному кулаку автомобиля
Там, где это возможно, компания Elaphe стремилась минимизировать вес L1500. В результате «активная часть» двигателя — электрическая машина с обмотками и магнитами — занимает всего 30% от общего веса, что обеспечивает плотность крутящего момента 460 Нм/л по сравнению с тем, что компания называет своим ближайший конкурент на уровне 390 Нм/л. Он также имеет отношение крутящего момента к массе 100 Нм/кг; его конкуренты разгоняются до 65 Нм/кг, говорит Элафе.
В результате «активная часть» двигателя — электрическая машина с обмотками и магнитами — занимает всего 30% от общего веса, что обеспечивает плотность крутящего момента 460 Нм/л по сравнению с тем, что компания называет своим ближайший конкурент на уровне 390 Нм/л. Он также имеет отношение крутящего момента к массе 100 Нм/кг; его конкуренты разгоняются до 65 Нм/кг, говорит Элафе.
L1500 состоит из 83 компонентов, почти 60% из которых являются стандартными деталями поставщиков, а остальные в основном отлиты или изготовлены по индивидуальному заказу.
Система сконфигурирована как аутраннер с прямым приводом (это означает, что она имеет внешний ротор и внутренний статор). Алюминиевый корпус ротора двигателя содержит ярмо и постоянные магниты, корпус наматывается на статор и соединяется с поворотным кулаком автомобиля с помощью обычного подшипника ступицы автомобильного колеса.
Кольцо статора изготовлено из пластин магнитной стали. В его полюсах используется запатентованный метод намотки, разработанный внутри компании, и он крепится непосредственно к поворотному кулаку автомобиля. Традиционный фрикционный тормоз с дисковым ротором и суппортом помещается внутри кольца статора и крепится к ступице, как и во всех современных автомобилях.
Традиционный фрикционный тормоз с дисковым ротором и суппортом помещается внутри кольца статора и крепится к ступице, как и во всех современных автомобилях.
При проектировании L1500 компания Elaphe уделяла большое внимание простоте интеграции и логистике компонентов. В результате все интеграции колес с использованием двигателя будут также включать стандартные серийные автомобильные подшипники и тормозные системы (существует целый ряд), включая стандартизированные тормозные диски, суппорты и электронные стояночные тормоза.
Описанный узел ротора, статора, тормозов и подшипников передает нагрузку от дороги (которая зависит от веса автомобиля, динамики торможения, прохождения поворотов и неровностей грунта) непосредственно на поворотный кулак автомобиля через подшипник, защищая компоненты электродвигателя. от таких ударных нагрузок.
Elaphe объединяет (слева направо) стандартные шины с 19-дюймовыми дисками, корпус L1500 (и ротор), его статор, стандартные автомобильные тормоза и стандартный подшипник для установки на поворотный кулак автомобиля
Доступ к этим деталям также сохраняется, как и в обычных дорожных транспортных средствах (и, следовательно, их легко обслуживать) благодаря подходу компании к интеграции, при котором двигатель монтируется над тормозным узлом, аналогично ободу и шине.
В результате каждый двигатель клиента может быть настроен в определенной степени, чтобы изменить интерфейсы ротора и статора в соответствии с его предпочтениями в отношении периферийных компонентов, таких как тормоза, подшипники и другие внутренние детали.
«Поэтому двигатели L1500 просто вставляются между ступицами и ободами электрического [или гибридного] транспортного средства, что позволяет использовать существующее пространство внутри колеса без необходимости изменять подвеску или рулевое управление на платформе», — объясняет технический директор Elaphe. Горазд Готовац.
В течение 5 минут L1500 можно интегрировать или снять с автомобильного колеса для планового технического обслуживания, такого как проверка и замена тормозов.
В дополнение к возможности настройки электродвигателя в колесе для предпочитаемых автопроизводителями поставщиков тормозов и подшипников, производительность и компоненты L1500 также могут быть адаптированы для удовлетворения конкретных требований производителей.
Как говорит Лэмпик: «Мы хотели внести то, что, по нашему мнению, необходимо для улучшения будущих OEM-моделей EV/HEV. В частности, мы увидели пробел на рынке высокопроизводительных распределенных приводов для электрических кроссоверов и внедорожников, седанов, пикапов, транспортных средств и автомобилей с чрезвычайно низким энергопотреблением. Большинство из этих сегментов имеют высокий потенциал роста, и они также выигрывают от реального полного привода с векторизацией крутящего момента и смешиванием тормозов в компактном корпусе».
Спецификации
Постоянный магнит, трехфазный синхронный двигатель переменного тока
в при колесе/прямом приводе
Внешний ротор с поверхностными магнитами
Внутренняя статор с псевдо-Hellical Multiphase Multiphase Wave Dulling
. С жидкостным охлаждением (смесь воды и гликоля 50:50)
Диапазон рабочего напряжения: 200–800 В
Максимальная выходная мощность: 113,6 кВт при 370 В пост. тока
тока
Длительная выходная мощность: 65,3 кВт при 370 В пост.0003
Длительная выходная мощность с ослаблением поля: 83 кВт при 370 В пост. тока. Максимальный выходной крутящий момент: 1500 Нм
Длительный выходной крутящий момент: 650 Нм
Вес: 33,3 кг )
Осевая длина: 142,2 мм (прилегание ступицы к ободу меньше)
Мультифизическая конструкция конструкции
Для обеспечения точной и надежной работы каждого двигателя в течение всего срока службы, независимо от различий между шасси автомобиля и дополнительными деталями. , Elaphe имеет строгий набор требований к дизайну, моделированию и процессам тестирования. Это жизненно важно, поскольку разработка надежных колесных электродвигателей охватывает гораздо более широкий набор целей, чем просто достижение оптимальных магнитных потоков, индуктивностей и других типичных параметров электродвигателей.
«В качестве физиков мы одновременно анализировали электромагнитные, тепловые, механические и управляющие аспекты двигателя с самого начала разработки L1500. Это то, что мы называем нашим «мультифизическим» подходом», — говорит Лампик.
Это то, что мы называем нашим «мультифизическим» подходом», — говорит Лампик.
Компания Elaphe использует испытательный автомобиль внедорожника для моделирования сценариев резкого торможения и прохождения поворотов конструкции и размеры, чтобы соответствовать широкому спектру требований к производительности и окружающей среде, а также другим критериям оценки».
Как отмечает Лэмпик, каждый компонент каждого L1500 должен быть разработан с учетом «мультифизической эффективности», способной выдерживать множество различных видов тепловых, структурных и электрических нагрузок.
Масштабируемость процессов проектирования компании имела решающее значение для разработки структурной архитектуры каждого нового L1500. Будучи самым большим и мощным колесным двигателем Elaphe, проект представлял собой новую территорию для всех участников.
«Наши идеи и модели для оптимизации электродвигателей являются частью нашего собственного ноу-хау», — добавляет Лэмпик. «Несмотря на то, что с точки зрения общих, интеллектуальных стандартов для разработки мотор-колес еще предстоит пройти определенный путь, за последние 20 лет мы создали набор внутренних стандартов на основе наших инструментов, методологий и различных передовых отраслевых практик».
«Несмотря на то, что с точки зрения общих, интеллектуальных стандартов для разработки мотор-колес еще предстоит пройти определенный путь, за последние 20 лет мы создали набор внутренних стандартов на основе наших инструментов, методологий и различных передовых отраслевых практик».
Решение создать набор внутренних стандартов для концепций дизайна также привело к тому, что Elaphe построила собственный испытательный центр, в котором размещается оборудование для оценки выносливости и долговечности новых прототипов и двигателей, изготовленных по индивидуальному заказу. Оборудование позволяет быстро итерировать и подтверждать дизайн продукта, хотя компания также сотрудничает с различными учреждениями по всему миру для беспристрастной проверки третьей стороной и для дополнения собственных усилий.
«В целом наша стратегия испытаний основана на трех факторах: испытаниях, основанных на OEM и международных стандартах, затем на законодательстве и, наконец, на внутренних идентифицированных испытаниях, основанных на характере отказов конструкции и упражнениях по анализу последствий, испытаниях транспортных средств и симуляциях», — говорит Лампик.
«OEM и международные стандарты, в частности, были адаптированы для охвата конкретных условий окружающей среды и требований к нагрузкам на конструкцию, которые сильно различаются для колесных двигателей по сравнению с центрально установленными электронными осями, поскольку они обычно основаны на конструктивных и электрических компонентах. которые находятся в колесе автомобилей с ДВС.
«Эти стандарты также учитывают наши требования к рабочим характеристикам электродвигателей и инверторов, электромагнитной совместимости, электробезопасности, долговечности и прокладке кабелей. Анализ, основанный на стандарте ISO 26262, также оказался полезным».
Моторы-колеса в течение своего срока службы подвергаются гораздо большему количеству ударов и нагрузок, чем моторы электрических осей, поскольку они постоянно находятся в почти прямом контакте с дорогой. В результате модели разработки Elaphe включают в себя большое количество исследований, симуляций и тестов для создания двигателя, который будет выдерживать широкий спектр нагрузок в течение всего срока службы.
Некоторые из нагрузок, действующих на L1500, генерируются внутренними силами. Примерами этого являются термомеханические напряжения из-за избыточного тепла из-за электромагнитных потерь в медных обмотках, стальных пластинах и постоянных магнитах, а также потери на трение в подшипниках и уплотнениях.
Избыточная предварительная нагрузка при производстве, возникающая в основном во время механической обработки и литья, также может вызвать накопление остаточных внутренних напряжений в конструкциях двигателей до их испытаний. С этой целью Elaphe использовала термообработку, чтобы минимизировать эти нагрузки и их влияние на компоненты конструкции.
Внешние нагрузки в значительной степени зависят от типов транспортных средств, в которых установлен двигатель, поскольку изменения стиля вождения, ездовых циклов и загруженности транспортного средства приводят к изменению массы транспортного средства и центра тяжести (ЦТ). Например, электронные двигатели тяжелых коммерческих и внедорожных транспортных средств будут выдерживать более высокие внешние нагрузки из-за более жесткого взаимодействия между шиной и дорогой.
Кроме того, через шину на электродвигатель могут воздействовать нагрузки от земли или дороги, состоящие в основном из вибраций и изгибающих моментов. Вместо этого они должны передаваться через обод и подшипник в поворотный кулак (прежде чем перейти к шасси автомобиля).
Чтобы точно спрогнозировать и оценить требования к структурной целостности компонентов двигателя в условиях особенно жестких дорожных нагрузок, компания Elaphe использовала внедорожник для имитации сценариев резкого торможения и прохождения поворотов. В ходе испытаний изучалось ускорение центра тяжести и внешние боковые нагрузки на все четыре колеса, при этом особенно сильное прохождение поворотов (поперечное ускорение более 1,1 g) создавало усилие примерно 14 000 Н на одну из правых шин автомобиля.
В соответствии со стандартами SAE, включая SAE J175 и J19, выполнялось дополнительное моделирование внешних нагрузок на L1500, таких как удары о выбоины, бордюры или другие проблемы, связанные с неровной дорогой. 81 по испытаниям на удар колес и шин дорожных транспортных средств.
81 по испытаниям на удар колес и шин дорожных транспортных средств.
Хотя такие исследования и моделирование могут показаться преждевременными, определение множества нагрузок, действующих на мотор-колеса (и их последствий), имело решающее значение для определения целей проектирования архитектуры компонентов L1500 и их оптимизации.
Перед повторением ключевых аспектов конструкции нового L1500 посредством моделирования в САПР, Elaphe сначала выбирает ключевые периферийные компоненты (включая обод, тормоза и подшипники), чтобы определить, сколько места осталось для статора и ротора.
Чтобы воплотить в жизнь идеальную конструкцию корпусов и интерфейсов двигателей, технические специалисты Elaphe проводят «топологическую оптимизацию». Они начинаются с неопределенной CAD-аппроксимации каждого компонента с целевым уровнем структурной жесткости, а затем неоднократно подвергают их воздействию различных симуляций нагрузки (включая различные их комбинации и количества) в течение нескольких десятков итераций.
Запустив эти симуляции нагрузки в процессе генеративного проектирования (с постоянной целью жесткости и с помощью набора собственных критериальных функций), численное программное обеспечение может определить все геометрические качества, необходимые для минимизации структурного напряжения в металлах статора и ротор (при этом сохраняя его малый вес и по возможности принимая во внимание производственные ограничения).
Проекты, полученные в результате топологической оптимизации, затем обрабатываются промышленным дизайнером, чтобы он мог посоветовать точные рекомендации и ограничения относительно того, как чертежи САПР можно реально и точно воспроизвести в реальном мире.
После фильтрации в соответствии с рекомендациями промышленного дизайнера конструкции статора и ротора затем оцениваются (вместе с подключенными структурными интерфейсами для целостного моделирования двигателя) с использованием мультифизического анализа методом конечных элементов (МКЭ).
FEA включает в себя статическое моделирование (т. е. однократные удары) того, как напряжения и деформации будут распределяться по двигателю при различных скоростях нагрузки, уровни и способы возникновения трения между компонентами и соединениями, а также другие свойства структурной целостности конструкции.
Кроме того, моделирование NVH (шум, вибрация и жесткость) дает представление о критической части испытаний на инерционную нагрузку. У компании есть программные сценарии (и специальные тестовые трассы, которые позже будут использоваться для проверки двигателя на дороге) для проезда по выбоинам, кирпичным дорогам, лежачим полицейским, заглубленным каменным дорожкам и другим поверхностям, чтобы проверить, как двигатель справляется с повторяющимися ударами. и гармонические напряжения такого использования.
После статических испытаний проводятся испытания на усталость, чтобы смоделировать воздействие многократных нагрузок в течение срока службы двигателя и определить, сколько повторных нагрузок может выдержать двигатель, прежде чем конечные элементы его компонентов начнут проявлять признаки износа.
Подход Elaphe к таким испытаниям основан на стандарте ISO 16750-3:2007 для условий окружающей среды и испытаний на механические нагрузки на электрическое и электронное оборудование.
После проверки того, где появляются самые ранние повреждения, цикл проектирования (при необходимости) выполняется снова с самого начала, чтобы оптимизировать фаски, радиусы и другие мелкие формы и детали компонентов до фактического изготовления.
Имея в виду подшипники
Как уже упоминалось, определение оптимального подшипника было одной из первых и наиболее важных задач при разработке L1500 с точки зрения определения допусков и оптимальных конструктивных качеств его различных компонентов.
«Подшипник выбирается в зависимости от нагрузки на колесо, зависящей от веса автомобиля, его центра тяжести, колесной базы, ширины колеи и максимального поперечного ускорения, достигаемого при прохождении поворотов. Он также должен соответствовать условиям жесткости при опрокидывании», — говорит Готовац.
Первоначальная оценка жесткости подшипников, выбранных каждым клиентом, выполняется с использованием программного обеспечения для числового анализа, разработанного компанией Elaphe. создание имитационных моделей и процедур определения характеристик, чтобы определить, можно ли использовать COTS или нестандартный подшипник. Это позволяет нам сосредоточиться на наших основных компетенциях в области проектирования статоров и роторов и избавляет нас от чрезмерного проектирования».
Одобрение подшипника для L1500 требует особого внимания. Нагрузки, поступающие от дороги, воздействуют на подшипник значительными силами, особенно изгибающими моментами, что приводит к незначительным упругим деформациям во время работы двигателя.
В то время как обычные деформации подшипников не представляют серьезной проблемы, чрезмерные деформации в колесном двигателе могут вызвать отклонения между ротором и статором.
Это изменяет форму воздушного зазора, что вызывает вибрации, а также снижение эффективности из-за увеличения сопротивления магнитному потоку между обмотками и магнитами там, где зазор увеличивается, и уменьшения сопротивления потока там, где он сужается.
Чтобы свести к минимуму влияние на воздушный зазор, подшипник должен выдерживать достаточные внешние нагрузки, чтобы предотвратить их передачу на ротор и статор. Поэтому компания Elaphe разработала режим проверки жесткости и долговечности подшипников, прежде чем интегрировать их в L1500 (или другие мотор-колеса).
Во-первых, жесткость предпочтительного подшипника клиента определяется с помощью собственного программного обеспечения для численного анализа Elaphe.
Для получения более широкой и точной информации о том, как подшипник будет вести себя в течение всего срока службы, компания Elaphe затем проводит эксперименты с использованием машины для ускоренных испытаний на долговечность колес (WALT) в Институте структурной долговечности и надежности систем Fraunhofer LBF в Дармштадте, Германия, с дополнительными аналогичные испытания локально на специальных стендах для измерения прогиба.
Машины WALT изначально были разработаны для быстрого тестирования и анализа устойчивости компонентов колеса к повреждениям в течение всего срока службы. Помимо того, что они полезны для тестирования шин и дисков, они также предназначены для быстрого, воспроизводимого и контролируемого исследования подшипников, что идеально подходит для L1500.
Помимо того, что они полезны для тестирования шин и дисков, они также предназначены для быстрого, воспроизводимого и контролируемого исследования подшипников, что идеально подходит для L1500.
L1500 в испытательной машине ускоренного срока службы колеса для проверки предпочитаемого клиентом подшипника на жесткость в течение срока службы
После определения жесткости подшипника следует анализ деформации воздушного зазора. Для этого необходимо подвергнуть подшипник и двигатель испытаниям на поворотах, выносливости и долговечности (в соответствии со стандартами SAE J328/2016-03 и J328/2005-2), чтобы увидеть, как они выдерживают нагрузки (уменьшая их передачу на остальную часть двигателя). ), и происходит ли контакт в воздушном зазоре в какой-либо точке.
Термодатчики добавляются к ступице подшипника во время этих испытаний для измерения любого перегрева. Тепловизионная камера также записывает дополнительные данные, а лазерные датчики измеряют осевые и радиальные деформации ротора.
После того, как эти испытания подтвердят, что компоненты двигателя не повреждены и не имеют контакта статор-ротор в воздушном зазоре (и что подшипник никогда не перегревается и не достигает температуры, указывающей на повреждение), предпочтительный заказчиком подшипник может быть интегрирован в L1500.
«Сочетание максимального контактного напряжения по Герцу и деформации, соответствующей максимально допустимому отклонению воздушного зазора, дает особое требование к подшипнику, называемое «жесткостью при опрокидывании», которое обычно составляет от 7 до 10 кН/° и которое также охватывает крайние случаи», — говорит Готовац.
«OEM в сотрудничестве с Elaphe может выбрать предпочитаемый подшипник, соответствующий этим параметрам, и большинство существующих OEM-производителей и поставщиков производят подходящие подшипники».
Окончательная сборка и испытания
После того, как основные компоненты L1500 и их детали отшлифованы, выполняется целостный анализ нагрузок, связанных со сборкой. Это вопросы, которые не могут быть изолированы отдельными компонентами или их разделами.
Это вопросы, которые не могут быть изолированы отдельными компонентами или их разделами.
Например, проводится термомеханическое моделирование для изучения того, как воздушный зазор между ротором и статором может деформироваться в результате сильного нагрева и удара. Эти симуляции должны показать, что степень деформации никогда не превышает определенного (нераскрытого) значения, что гарантирует отсутствие ударов между обмотками или постоянными магнитами.
После того, как все варианты конструкции будут подтверждены с помощью анализа CAD и FEA, можно построить прототип варианта двигателя и подвергнуть ряду испытаний на испытательных стендах компании, чтобы подтвердить точность моделирования.
«Большинство мощных электродвигателей в мире — это высокоскоростные системы со средним или низким крутящим моментом, поэтому большинство измерительного оборудования в мире рассчитано на эти характеристики», — отмечает Готовац.
«Например, даже в испытательной системе мощностью 200 кВт маловероятно, что колесный двигатель мощностью 60 кВт может быть испытан при его номинальном или пиковом крутящем моменте из-за конструкции испытательных стендов поставщика и их соответствующих датчиков крутящего момента. ограничения.
ограничения.
«Именно поэтому наши измерительные станции были разработаны внутри компании с нуля с использованием комбинации стандартного аппаратного и программного обеспечения, а также наших собственных улучшений, чтобы соответствовать требованиям колесной силовой установки, сохраняя при этом совместимость с большинством других систем.
«Параллельно с требованием высокого крутящего момента мы сконструировали их таким образом, чтобы избежать резонансных частот при тестировании двигателей на очень высоких скоростях.
«Сочетание этих двух аспектов делает наши измерительные станции уникально «универсальными» в их способности тестировать двигатели самых разных типов и характеристик при соблюдении автомобильных стандартов».
Испытания L1500 включают испытания на механические удары. Они состоят из 18 ударов по 100 г каждый, а также еще 60 ударов по 50 г каждый.
L1500 на вибростенде перед началом испытания на случайную вибрацию при осевых нагрузках
Также проводится испытание на стойкость к случайным вибрациям путем объединения вибростенда и термокамеры для приложения вибраций с частотой до 2000 Гц и 40 g действующие в горизонтальном, вертикальном и осевом направлениях. Как и в случае с предыдущим моделированием усталости, оба испытания проводятся в соответствии со стандартом ISO 16750-3:2007.
Как и в случае с предыдущим моделированием усталости, оба испытания проводятся в соответствии со стандартом ISO 16750-3:2007.
В дополнение к собственному испытательному оборудованию, Elaphe также иногда использует стороннее испытательное оборудование для более традиционных или специализированных испытаний, таких как вибрация, удары, защита от воздействия окружающей среды и электромагнитная совместимость.
Ротор
Учитывая важность плотности крутящего момента для колесного двигателя, компания Elaphe построила L1500 с конфигурацией с внешним бегунком, в которой ротор непосредственно приводит в движение колесо при его вращении.
«В наших стандартных общеизвестных решениях мы конструируем ротор с постоянными магнитами, установленными на поверхности, хотя мы знакомы с другими способами проектирования и установки магнитов, если приложение или заказчик требуют их использования», — говорит Готовац.
«Количество магнитов, которые мы устанавливаем, варьируется, но довольно велико, обычно превышает 40 на L1500. Это делает их небольшими по размеру и имеет очень положительный эффект с точки зрения уменьшения потерь на вихревые токи и их общей массы по отношению к магнитному потоку».
Это делает их небольшими по размеру и имеет очень положительный эффект с точки зрения уменьшения потерь на вихревые токи и их общей массы по отношению к магнитному потоку».
Неодим используется для постоянных магнитов L1500, выбор материала также обусловлен потребностью в высокой плотности крутящего момента. «Точный сорт неодима в каждом L1500 зависит, в частности, от параметров, связанных с оптимизацией затрат и разработкой конкретных приложений», — добавляет Готовац. «Для магнитной прочности всегда существует компромисс между классом магнита и физическим воздушным зазором в двигателе».
Как отмечает генеральный директор, собственный алгоритм целостной оптимизации двигателя Elaphe учитывает (среди прочего) широкий диапазон параметров магнита при оценке конструкции двигателя в целом.
«В первые годы разработки наших технологий колесных двигателей мы использовали в наших прототипах в основном магниты N40UH [максимальная рабочая температура которых составляет 180 ° C], чтобы обеспечить хорошие тепловые характеристики», — вспоминает Готовац. «Набравшись опыта и оптимизировав точность нашей модели, мы заменили N40UH на N40SH, последний из которых относится к температурному классу 150°C».
«Набравшись опыта и оптимизировав точность нашей модели, мы заменили N40UH на N40SH, последний из которых относится к температурному классу 150°C».
Выбор клея для крепления постоянных магнитов в их пазах проверяется и подтверждается аналогично конструкции ротора и статора. Его выносливость и долговечность проверяются в зависимости от температурных циклов, циклов нагрузки, влажности, ударов и вибрации, чтобы гарантировать, что магниты останутся закрепленными во всех режимах использования в современном легковом автомобиле.
Многофазная волновая обмотка статора
В полюсах статора L1500 используется форма обмотки, запатентованная Elaphe, для достижения улучшенных характеристик по сравнению с альтернативными конфигурациями обмотки, которые для применения в колесах считались обеспечивающими недостаточные уровни крутящего момента, энергии эффективность и экономичность.
Например, при намотке внахлест каждая непрерывная жила проводящего провода может быть повреждена, когда она вставляется в зубья статора и скручивается вокруг них. Кроме того, намотка проволоки таким образом создает значительные выступы меди, при этом жилы торчат из зубьев статора (из-за большого количества витков вокруг них) или выступают при переходе от одного зубца к другому.
Кроме того, намотка проволоки таким образом создает значительные выступы меди, при этом жилы торчат из зубьев статора (из-за большого количества витков вокруг них) или выступают при переходе от одного зубца к другому.
Поскольку эти выступы находятся за пределами пазов статора, они не влияют на крутящий момент двигателя. Поэтому они в основном просто увеличивают электрическое сопротивление и тепловыделение, вызывая снижение энергоэффективности.
Многие формы волновой обмотки также имеют выступы, которые снижают эффективность. Подобно обмоткам статора со шпильками, они могут быть согнуты в формы, которые принудительно упаковывают медь обратно в ферромагнитный сердечник и минимизируют степень выступания за его пределами. Однако в результате проволочные жилы могут получить значительные повреждения.
Статоры со шпилькой и аналогичные конфигурации, в которых используются дискретные короткие сегменты медных проводящих стержней (вместо прядей проволоки или «блочных катушек», вырезанных из листов медной фольги), могут быть деформированы по мере необходимости, чтобы минимизировать выступы и максимально увеличить плотность упаковки в пазы статора без повреждений.
«Однако наличие такого большого количества отдельных медных сегментов требует большого количества сварки — иногда сотни сварных швов на один статор — а это означает, что для производства статоров таким способом требуется больше времени, энергии, изоляции и сложного оборудования», — говорит Готовац.
«Если вы можете использовать непрерывный, непрерывный провод вместо множества отдельных отрезков, вам не потребуется так много изоляции, и его производство будет более рентабельным. Наш метод означает, что для каждого статора L1500 требуется всего около 24 сварных швов».
Метод Элафа называется «компактная многофазная волновая обмотка». Его разработка началась в начале 2000-х годов с предполагаемыми (и достигнутыми) преимуществами, включая улучшение удельного крутящего момента, энергоэффективность, простоту сборки и простоту охлаждения по сравнению с традиционными подходами к обмотке катушки.
Как и в шпилечных статорах, в компактной многофазной волновой обмотке в качестве проводников используются толстые, предварительно деформированные «полосы» (по существу, длинные тонкие стержни) из меди, а не пряди или тонкие листовые конусы.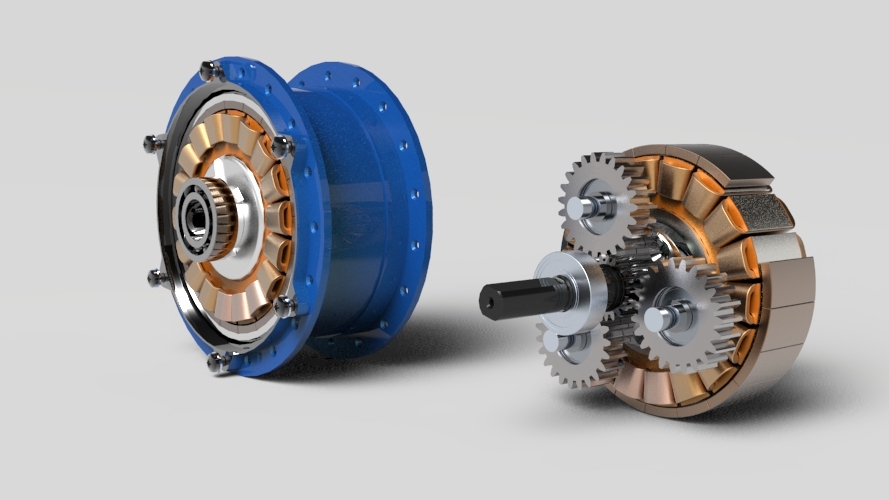 Ленты проводника могут иметь круглое или квадратное поперечное сечение, а также тангенциальную форму для «u-образного изгиба» вокруг каждого зубца статора к следующему, по крайней мере, с одной непрерывной полосой на фазу двигателя (в отличие от множества отдельных полос). используется в шпильках статоров).
Ленты проводника могут иметь круглое или квадратное поперечное сечение, а также тангенциальную форму для «u-образного изгиба» вокруг каждого зубца статора к следующему, по крайней мере, с одной непрерывной полосой на фазу двигателя (в отличие от множества отдельных полос). используется в шпильках статоров).
«Точная длина каждой полосы настраивается в соответствии с приложением для достижения правильной балансировки напряжения в каждом проводе и, соответственно, правильной скорости и крутящего момента для двигателя без какого-либо вредного воздействия на потери тока», — добавляет Готовак.
Собственные намоточные машины Elaphe оптимизированы для нанесения каждой последующей фазы меди с соответствующим усилием, позволяющим вставлять и уплотнять ленты в пазы статора настолько глубоко, насколько это необходимо для желаемой плотности и однородности упаковки, не царапая и не ломая их.
Кроме того, выступы лент предварительно сформированы «псевдовинтовым» способом, изгибаясь перпендикулярно и радиально относительно пазов статора, чтобы свести к минимуму объем занимаемого ими пространства и то, насколько далеко они выступают за зубья статора. . В них нет ни затягивания, ни натяжения, как у медных жил, ни какой-либо постдеформации, как у шпилечных проводников статора.
. В них нет ни затягивания, ни натяжения, как у медных жил, ни какой-либо постдеформации, как у шпилечных проводников статора.
«Преимущество по сравнению со шпильчатыми статорами заключается в том, что наши выступы намного короче, что означает меньшие потери», — говорит Готовац. «В относительном выражении требуется гораздо меньше проводных соединений, что повышает стабильность качества, надежности и производственных затрат.
«Мы запатентовали этот подход, и с тех пор некоторые крупные OEM-производители внедрили спиральную многофазную волновую обмотку, но мы продолжали развивать наше автоматизированное оборудование для намотки и процедуры испытаний статоров. Это также помогло усовершенствовать наши запатентованные процессы, позволяющие сделать обмотки максимально короткими».
Охлаждение
Другие запатентованные инновации были разработаны, чтобы помочь сбалансировать напряжения между параллельными ветвями в каждой фазе, ускорить автоматизированное производство больших объемов меди (при более плотной упаковке) и сделать обмотку более устойчивой к высокие температурные градиенты – не только экстремальные температуры, но и быстрые изменения за короткие промежутки времени.
«Основная проблема с мотор-колесами заключается в том, как справляться с температурными перепадами, — объясняет Готовац. «Наша многофазная волновая обмотка помогает увеличить плотность упаковки меди, что снижает плотность тока по длине проводника.
«Поэтому, несмотря на то, что некоторым проводам немного сложнее передавать тепло жидкостному контуру, в результате вы получаете более холодный статор во время работы. Коэффициент теплопередачи меди лучше, чем у любого другого материала в двигателе, поэтому, чем больше меди, тем лучше тепловой КПД и меньше тепловые потери.
Статор L1500 до (слева) и (после) установки дискового тормоза. Обмотки были залиты специальной термотрансферной смолой Elaphe
«Конечно, дальнейшее пассивное охлаждение является ключевым, поэтому наши обмотки залиты, чтобы помочь управлять тепловыми потоками, которые все еще возникают. Заливочный материал представляет собой специальную формулу эпоксидной смолы, разработанную для удовлетворения таких требований, как теплопередача, трещиностойкость, удельное электрическое сопротивление, продолжительность производственного цикла и другие аспекты, связанные с технологическим процессом».
Контур жидкостного охлаждения представляет собой активное охлаждение L1500. Охлаждающая среда обычно представляет собой смесь водно-гликолевого раствора 50:50, которая обычно используется в других тяговых двигателях.
«Как и в случае с нашими магнитами, количество полюсов статора поддерживается выше 40 [более 20 пар полюсов]. Это максимизирует площадь поверхности, под которой могут проходить наши охлаждающие каналы, как можно ближе к максимальному количеству меди», — говорит Готовац.
«Это имеет два важных преимущества. Во-первых, максимизируя охлаждающую поверхность, мы достигаем максимально возможной плотности крутящего момента. Во-вторых, система охлаждения расположена таким образом, что она также внутренне защищает электромагнитную часть от передачи тепла от тормозов».
Внешний инвертор
Помимо производства различных механических компоновок двигателей, компания Elaphe также разработала, испытала и интегрировала собственные инверторы двигателей. Однако большинство его систем предназначены для работы с инвертором на шасси автомобиля, а не внутри колесной арки.
Однако большинство его систем предназначены для работы с инвертором на шасси автомобиля, а не внутри колесной арки.
Этот выбор обусловлен рядом причин. Во-первых, компания заметила, что рынок колесных двигателей имеет очень разнообразные требования, с множеством различных транспортных средств и ценностных предложений. Поэтому Elaphe предполагает значительную адаптацию и различные производственные циклы для каждого двигателя.
Учитывая необходимость оставаться гибкими для типичных покупателей колесных двигателей, разработка двигателей на основе встроенных инверторов означала бы повышение стоимости конструкции и компонентов для каждого клиента. Это, вероятно, снизило бы уровень внедрения из-за более высокой начальной цены.
«На наш взгляд, ожидаемая траектория развития транзисторов слишком быстра, чтобы использовать одну конкретную технологию, которую мы можем с уверенностью использовать в наших двигателях», — говорит Лэмпик. «Мы не можем знать наверняка, станут ли стандартом кремниевые IGBT, SiC или какой-либо другой транзистор.
«Хотя мы можем использовать MOSFET, IGBT, SiC и GaN, мы обнаружили, что L1500 чаще всего сочетается с COTS кремниевыми IGBT инверторами с максимальной выходной мощностью 200 кВА, установленными на борту автомобиля», — говорит Готовац.
Каждый L1500 имеет входы для трех фазных кабелей высокой гибкости и двух сигнальных кабелей для подключения новых инверторов, поскольку предпочитаемые технологии коммутации часто могут меняться или развиваться
намного ниже, и он не создает там неподрессоренной массы или тепловых ограничений, как это было бы внутри колеса. В результате в жгуте проводов для подключения инверторов к L1500 имеется три высокогибких фазных кабеля и два сигнальных кабеля.
«Отсутствие заблокированного инвертора также открывает возможность снижения затрат на уровне всей трансмиссии. Например, разработчик электромобиля может выбрать интеграцию двойного инвертора в одном корпусе, который может использовать одноконтурную систему охлаждения, использовать одну логическую плату, более быструю связь для полного управления осью и так далее», — говорит Готовац.
Поскольку требования к упаковке и охлаждению меняются в зависимости от различных инверторных технологий и топологий, наличие инвертора на шасси автомобиля означает, что его можно относительно легко заменить, по сравнению с попыткой установить совершенно новый инвертор на место старого.
Поэтому программное обеспечение компании для управления двигателем было разработано с модульной и общей архитектурой, чтобы обеспечить совместимость с различным аппаратным обеспечением инверторов, поскольку ожидается, что будущие усовершенствования в инверторах быстро обеспечат более высокие скорости переключения и, следовательно, дальнейшие улучшения в управлении двигателем и эффективности.
«Когда вы выбираете разработку специального встроенного инвертора, вы, по сути, «фиксируете» характеристики двигателя в колесе, поэтому любому автомобилю, использующему эти колеса, потребуется много ресурсов, чтобы идти в ногу с разработками в области инвертора. технологий», — заключает Лэмпик.