Содержание
Линейные электродвигатели
- Подробности
- Категория: Электрические машины
- электродвигатель
Интересные и широкие перспективы развития электропривода связаны с применением так называемых линейных двигателей.
Большое число производственных механизмов и устройств имеют поступательное или возвратно-поступательное движение рабочих органов (подъемно-транспортные машины, механизмы подач различных станков, прессы, молоты и т. д.). В качестве привода этих механизмов и устройств до недавнего времени использовались обычные электродвигатели в сочетании со специальными видами механических передач (кривошипно-шатунный механизм, передача винт — гайка), преобразовывавших вращательное движение двигателей в прямолинейное движение рабочего органа.
Применение линейных электродвигателей позволяет упростить или полностью исключить механическую передачу, повысить экономичность и надежность работы привода и производственного механизма в целом.
Специфичность конструкции линейного двигателя определила появление и некоторых специальных терминов, применяемых для обозначения отдельных его частей. В настоящее время еще не принята единая система терминологии, поэтому в технической литературе одинаковый смысл вкладываются в понятия: статор — первичный элемент — индуктор, ротор — вторичный элемент — бегун — якорь — реактивная полоса. Часть двигателя, получающая энергию из сети, названа статором (хотя она не всегда является неподвижной частью), а часть двигателя, получающая энергию со статора, названа вторичным элементом.
Рис. 1. Принцип построения линейного двигателя переменного тока.
Линейные двигатели могут быть асинхронными, синхронными и постоянного тока, повторяя по принципу своего действия соответствующие двигатели вращательного движения.
Наибольшее распространение получили асинхронные линейные двигатели, которые мы и рассмотрим вначале. Представление об устройстве линейного асинхронного двигателя можно получить, если мысленно разрезать (рис.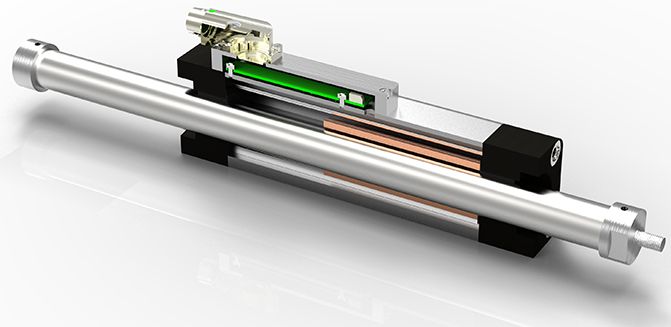 1) статор 1 и ротор 4 с обмотками 2 и 3 обычного асинхронного двигателя вдоль оси по образующей и развернуть в плоскость, как это и показано на рисунке. Образовавшаяся «плоская» конструкция представляет собой принципиальную схему линейного двигателя. Если теперь обмотки 2 статора такого двигателя подключить к сети переменного тока, то образуется магнитное поле, ось которого будет перемещаться вдоль воздушного зазора со скоростью V, пропорциональной частоте питающего напряжения f и длине полюсного деления т:
1) статор 1 и ротор 4 с обмотками 2 и 3 обычного асинхронного двигателя вдоль оси по образующей и развернуть в плоскость, как это и показано на рисунке. Образовавшаяся «плоская» конструкция представляет собой принципиальную схему линейного двигателя. Если теперь обмотки 2 статора такого двигателя подключить к сети переменного тока, то образуется магнитное поле, ось которого будет перемещаться вдоль воздушного зазора со скоростью V, пропорциональной частоте питающего напряжения f и длине полюсного деления т:
Это перемещающееся вдоль зазора магнитное поле пересекает проводники обмотки 3 ротора и индуктирует в них ЭДС, под действием которой по обмотке начнут протекать токи. Взаимодействие токов с магнитным полем приведет к появлению силы, действующей, по известному правилу Ленда, в направлении перемещения магнитного поля. Ротор — в дальнейшем будем называть его уже вторичным элементом — под действием этой силы начнет двигаться с некоторым отставанием (скольжением) от магнитного поля, как и в обычном асинхронном двигателе.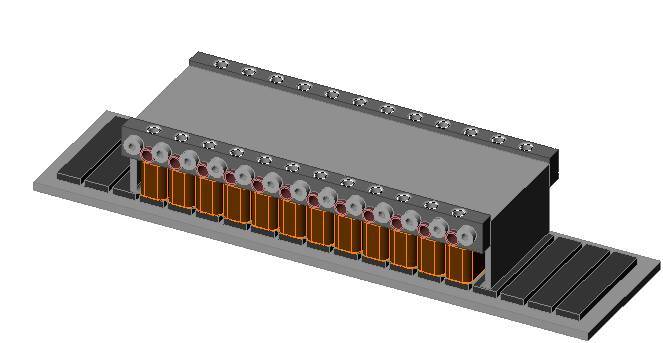
Рис. 2. Линейные двигатели.
а — с длинным вторичным элементом; б — с коротким вторичным элементом; в — двухстаторный; г —с сердечником; 5 — со вторичным элементом в виде полосы.
Представленная на рис. 1 конструкция представляет собой линейный двигатель с одинаковыми размерами статора и вторичного элемента. Помимо такой конструкции, в зависимости от назначения линейного двигателя вторичный элемент может быть длиннее статора (рис. 2,а) или короче его (рис. 2,6). Такие двигатели получили соответственно название двигателей с коротким статором и коротким вторичным элементом.
Вторичный элемент линейного двигателя не всегда снабжается обмоткой. Часто — и в этом одно из достоинств линейного асинхронного двигателя — в качестве вторичного элемента используется металлический лист (полоса), как это показано на рис. 2Д. Вторичный элемент при этом может располагаться также между двумя статорами (рис. 2,в) или между статором и ферромагнитным сердечником (рис.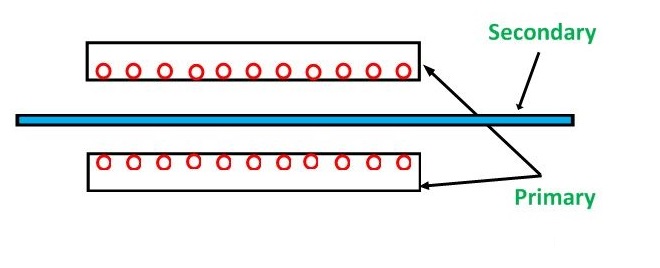 2,г). Двигатель с конструктивной схемой, приведенной на рис. 2,6, получил название двигателя с односторонним статором, со схемой по рис. 2,в — с двусторонним статором и со схемой по рис. 2,г — с односторонним статором и сердечником.
2,г). Двигатель с конструктивной схемой, приведенной на рис. 2,6, получил название двигателя с односторонним статором, со схемой по рис. 2,в — с двусторонним статором и со схемой по рис. 2,г — с односторонним статором и сердечником.
Вторичный элемент выполняется из меди, алюминия или стали, причем использование немагнитного вторичного элемента предполагает применение конструктивных схем с замыканием магнитного потока через ферромагнитные элементы, как, например, на рис. 2,в, г. Некоторое распространение получили составные сложные вторичные элементы с прилегающими друг к другу полосами из немагнитного и ферромагнитного материала, при этом ферромагнитная полоса выполняет роль части магнитопровода.
Принцип действия линейных двигателей со вторичным элементом в виде полосы повторяет работу обычного асинхронного двигателя с массивным ферромагнитным или полым немагнитным ротором. Обмотки статора линейных двигателей имеют те же схемы соединения, что и обычные асинхронные двигатели, и подключаются обычно к сети трехфазного переменного тока.
Отметим, что линейные двигатели очень часто работают в так называемом обращенном режиме движения, когда вторичный элемент неподвижен, а передвигается статор. Такой линейный двигатель, получивший название двигателя с подвижным статором, находит, в частности, широкое применение на электрическом транспорте.
Разновидностями линейных асинхронных двигателей являются дуговой и трубчатый (коаксиальный) двигатели.
Рис. 3. Дуговой двигатель.
Дуговой двигатель характеризуется расположением обмотки на части окружности, как это показано на рис. 3. Особенностью этого двигателя является зависимость частоты вращения его ротора I от длины дуги, на которой располагаются обмотки 2 статора 3.
Пусть обмотки статора располагаются на дуге, длина которой соответствует центральному углу сс=2тр, где т — длина полюсного деления и р — число пар полюсов. Тогда за один период тока вращающееся поле статора совершит поворот на угол. а в течение
одной минуты поле повернется на оборотов, т.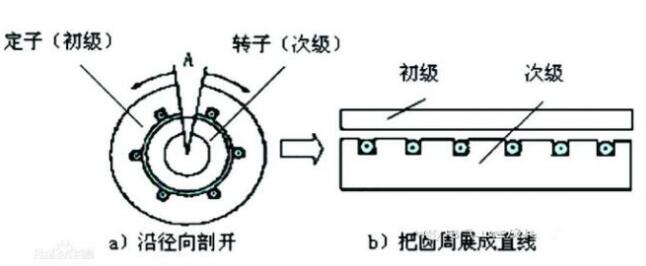 е. будет иметь частоту вращения яр, об/мин. Выбирая различные а, можно выполнять дуговые двигатели с различными частотами вращения ротора.
е. будет иметь частоту вращения яр, об/мин. Выбирая различные а, можно выполнять дуговые двигатели с различными частотами вращения ротора.
Одна из типовых конструкций трубчатого линейного двигателя представлена на рис. 4.
Статор двигателя 1 имеет вид трубы, внутри которой располагаются перемежающиеся между собой плоские дисковые катушки 2 (обмотки статора) и металлические шайбы 3, являющиеся частью магнитопровода. Катушки двигателя соединяются группами и образуют обмотки отдельных фаз двигателя. Внутри статора помещается вторичный элемент 4 также трубчатой формы, выполненный из ферромагнитного материала. При подключении к сети обмоток статора вдоль его внутренней поверхности образуется бегущее магнитное поле, которое индуктирует в теле вторичного элемента токи, направленные по его окружности. Взаимодействие этих токов с магнитным полем двигателя создает на вторичном элементе силу, действующую вдоль трубы, которая и вызывает (при закрепленном статоре) движение вторичного элемента в этом направлении.
Трубчатая конструкция линейных двигателей характеризуется аксиальным направлением магнитного потока во вторичном элементе в отличие от плоского линейного двигателя, в котором магнитный поток имеет радиальное направление.
Рис. 4. Трубчатый (коаксиальный) линейный двигатель.
Рассмотрим теперь несколько типовых практических конструкций линейных асинхронных двигателей в совокупности с производственными механизмами.
Широкое применение линейные двигатели нашли в электрическом транспорте, чему способствовал целый ряд преимуществ этих двигателей. Одно из них, уже отмеченное выше, определяется прямолинейностью движения вторичного элемента (или статора), что естественно сочетается с характером движения различных транспортных средств.
Рис. 5. Сочленение линейного двигателя с транспортным средством.
Другое, не менее важное обстоятельство связано с независимостью силы тяги от силы сцепления колес с рельсовым путем, что недостижимо для обычных систем электрической тяги. Поэтому ускорения и скорости движения средств транспорта при использовании линейных двигателей могут быть сколь угодно высокими и ограничиваться только комфортабельностью движения, допустимой скоростью качения колес по рельсовому пути и дороге, динамической устойчивостью ходовой части транспорта и пути. Исключается при использовании линейных двигателей и буксование колес электрического транспорта.
Поэтому ускорения и скорости движения средств транспорта при использовании линейных двигателей могут быть сколь угодно высокими и ограничиваться только комфортабельностью движения, допустимой скоростью качения колес по рельсовому пути и дороге, динамической устойчивостью ходовой части транспорта и пути. Исключается при использовании линейных двигателей и буксование колес электрического транспорта.
Одна из возможных конструктивных схем сочленения линейного двигателя с рельсовым транспортным средством показана на рис. 5. Линейный двигатель, укрепленный на тележке 3 подвижного состава, имеет конструкцию с двусторонним статором 1. Вторичным элементом является укрепленная между рельсами полоса 2. Напряжение на статор двигателя подается с помощью скользящих контактов.
Известны также конструкции линейных двигателей, где вторичным элементом являются рельс или элементы
несущей конструкции. Такие схемы характерны, в частности, для монорельсовых пассажирских и грузовых дорог и механизмов передвижения кранов.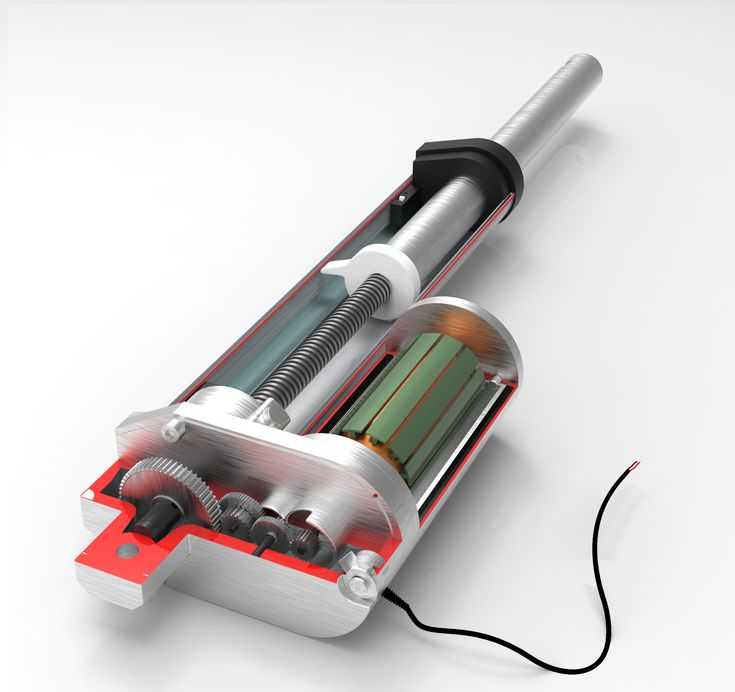 На рис. 6 в качестве примера показаны отечественный линейный двигатель, сконструированный для монорельсовой дороги. Этот двигатель имеет двусторонний статор 1 с обмоткой 2, внутри которого находится вторичный элемент в виде полосы 3. Статор двигателя перемещается по полосе с помощью несущих роликов 5. Ролики 4 служат для взаимной фиксации статора и вторичного элемента в горизонтальном направлении. Технические данные этого двигателя следующие: максимальная сила тяги 3800 Н, скорость двигателя 37 км/ч, номинальный ток 200 А, коэффициент полезного действия 50%,коэффициент мощности 0,4. Двигатель питается от трехфазной сети переменного тока частотой 50 Гц и напряжением 380 В.
На рис. 6 в качестве примера показаны отечественный линейный двигатель, сконструированный для монорельсовой дороги. Этот двигатель имеет двусторонний статор 1 с обмоткой 2, внутри которого находится вторичный элемент в виде полосы 3. Статор двигателя перемещается по полосе с помощью несущих роликов 5. Ролики 4 служат для взаимной фиксации статора и вторичного элемента в горизонтальном направлении. Технические данные этого двигателя следующие: максимальная сила тяги 3800 Н, скорость двигателя 37 км/ч, номинальный ток 200 А, коэффициент полезного действия 50%,коэффициент мощности 0,4. Двигатель питается от трехфазной сети переменного тока частотой 50 Гц и напряжением 380 В.
На рис. 7 показан пример использования линейных асинхронных двигателей для механизмов транспортировки грузов различных изделий. Конвейер, предназначенный для перемещения сыпучего материала 1 из бункера 2, имеет металлическую ленту 3, укрепленную на барабанах 4. Металлическая лента проходит внутри статоров 5 линейного двигателя, являясь вторичным элементом. Применение линейного двигателя в этом случае позволяет снизить предварительное натяжение ленты и устранить ее проскальзывание, повысить скорость и надежность работы конвейера.
Применение линейного двигателя в этом случае позволяет снизить предварительное натяжение ленты и устранить ее проскальзывание, повысить скорость и надежность работы конвейера.
Рис. 6. Линейный двигатель для монорельсовой дороги.
Рис. 7. Линейный двигатель для транспортеров.
Большой интерес представляет использование линейного двигателя для машин ударного действия, например сваезабивных молотов, применяемых при дорожных работах и строительстве. Конструктивная схема такого молота показана па рис. 8. Статор линейного двигателя 1 располагается на стреле молота 2 и может перемещаться по направляющим стрелы в вертикальном направлении с помощью лебедки 3. Ударная часть молота 4 является одновременно вторичным элементом двигателя.
Для подъема ударной части молота двигатель включается таким образом, чтобы бегущее поле было направлено вверх. При подходе ударной части к крайнему верхнему положению двигатель отключается и ударная часть опускается вниз на сваю под действием силы тяжести.:quality(80)/images.vogel.de/vogelonline/bdb/1099300/1099318/original.jpg) В некоторых случаях двигатель не отключается, а реверсируется, что позволяет увеличить энергию удара. По мере заглубления сваи статор двигателя перемещается вниз с помощью лебедки.
В некоторых случаях двигатель не отключается, а реверсируется, что позволяет увеличить энергию удара. По мере заглубления сваи статор двигателя перемещается вниз с помощью лебедки.
Электрический молот прост в изготовлении, не требует повышенной точности изготовления деталей, нечувствителен к изменению температуры и может вступать в работу практически мгновенно.
Широкое распространение получает линейный двигатель и в легкой промышленности, в частности в текстильном производстве. Примером использования линейного двигателя в текстильной промышленности является привод челнока или прокладчика нити ткацкого станка. Идея такого применения линейных двигателей основывается на принципиальной возможности органического объединения функций челнока и вторичного элемента линейного двигателя.
Рис. 8. Линейный двигатель для сваезабивного молота.
Одна из возможных принципиальных схем ткацкого станка показана на рис. 9. Система электропривода образована двумя цилиндрическими статорами 1 и 2,
снабженными концевыми амортизаторами 3.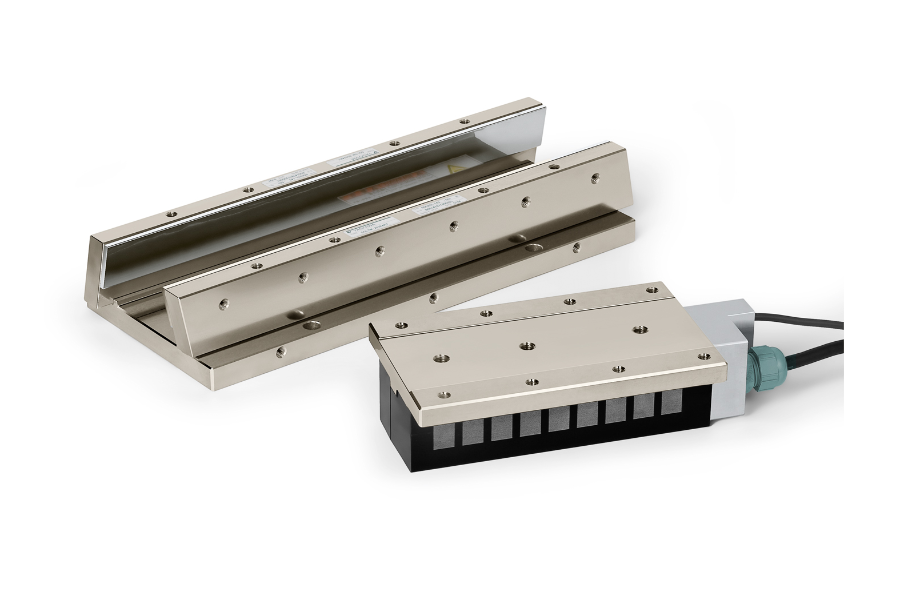 Вторичным элементом является легкий алюминиевый прокладчик 4 с захватом для нити, который перемещается из одного статора в другой по направляющему каналу 5.
Вторичным элементом является легкий алюминиевый прокладчик 4 с захватом для нити, который перемещается из одного статора в другой по направляющему каналу 5.
При нахождении прокладчика в статоре 1 устройство управления 6 подает напряжение на этот статор таким образом, что образовавшееся бегущее магнитное поле выталкивает прокладчик из статора. Прокладчик по направляющему каналу перелетает в другой статор, прокладывая нить, и тормозится там с помощью работающего в тормозном режиме статора 2 и амортизатора 3. Затем устройство управления переключает статор 2 для образования бегущего поля в направлении статора I, а сам статор 1 — в тормозной режим. Цикл перемещения прокладчика повторяется.
Рис. 9. Линейный двигатель для ткацких станков.
Ткацкие станки, выполненные по этому принципу, отличаются высокой производительностью, простотой автоматизации и удобством в обслуживании.
В настоящее время многие отечественные организации и заводы разрабатывают и серийно выпускают линейные асинхронные двигатели, среди них:
двигатели мощностью от нескольких ватт до 660 кВт со скоростями движения от 1,4 до 42 м/с для систем транспорта;
двухстаторные тяговые двигатели мощностью от 5 до 1000 кВт со скоростью движения 8,4—11,2 м/с для промышленного транспорта и различных производственных механизмов;
одностаторные тяговые двигатели для транспорта мощностью 26, 120 и 660 кВт со скоростью движения соответственно 10, 25,2 и 33,6 м/с;
тяговые двигатели с использованием рельса в качестве вторичного элемента;
линейные микродвигатели переменного и постоянного тока для привода машин легкой промышленности и для самопишущих измерительных приборов.
Таблица 1
| Тип привода-толкателя | Номинальное усилие, Н | Ход штока, м | Время хода, с | Полезная мощность, Вт |
ПТЛ-75 | 750 | 0,15 | 0,33 | 330 |
ЛТЛ-150 | 1500 | 0,25 | 0,56 | 660 |
ПТЛ-300 | 3000 | 0,3 | 0,67 | 1320 |
ПТЛ-100 | 1000 | 0,12 | 0,27 | 441 |
ПТЛ-200 | 2000 | 0,2 | 0,4 | 880 |
ПТЛ-600 | 6000 | 0,4 | 0,89 | 2640 |
В табл. 1 приведены технические данные цилиндрических линейных асинхронных двигателей, исиользуемых в безредукторном приводе-толкателе со скоростью движения штока 0,45 м/с.
1 приведены технические данные цилиндрических линейных асинхронных двигателей, исиользуемых в безредукторном приводе-толкателе со скоростью движения штока 0,45 м/с.
Таблица 2
| Тип двигателя | Мощность, кВт | Скорость бегущего поля, м/с | Среднее пусковое усилие, Н | КПД. % | Масса, кг |
ЛАД 1 | 40 | 12 | 450 | 64 | 690 |
ЛАД 2 | 40 | 18 | 600 | 63 | 700 |
ЛАД 3 | 120 | 12 | 1100 | 70 | 870 |
Для привода слитковозов в прокатном производстве разработаны линейные асинхронные двигатели, технические данные которых приведены в табл. 2.
2.
Наряду с асинхронными линейными двигателями применяются линейные двигатели постоянного тока. Они чаще всего используются для получения небольших перемещений рабочих органов и обеспечения при этом высокой точности и значительных пусковых усилий.
Кроме того, линейные двигатели постоянного тока (как и двигатели вращательного движения) позволяют при необходимости просто регулировать скорость движения рабочих органов. Рассмотрим примеры применения этих двигателей.
На рис. 10 показана схема привода продольного хода стола плоскошлифовального станка с использованием линейного двигателя постоянного тока. На столе 1 станка расположен вторичный элемент (якорь) 2 двигателя. Ток к обмоткам якоря подводится через коллектор 3 и щетки 4, установленные на станине 5 станка. На станине по всей длине хода якоря расположены полюсы двустороннего статора 6, при этом станина является одновременно и магнитопроводом двигателя.
На рис. 11 показана еще одна конструктивная схема линейного двигателя постоянного тока, который применяется для перемещения промышленных изделий. Этот двигатель по существу представляет собой двигатель постоянного тока с полым цилиндрическим якорем, разрезанный по образующей и развернутый в плоскость.
Этот двигатель по существу представляет собой двигатель постоянного тока с полым цилиндрическим якорем, разрезанный по образующей и развернутый в плоскость.
Рис. 11. Линейный двигатель для транспортировки изделий.
Рис. 10. Линейный двигатель для шлифовального станка.
Подвижная часть двигателя — якорь — состоит из немагнитного остова 1 и укрепленной на нем обмотки 2 якоря, которая может быть выполнена из изолированного обмоточного провода или изготовлена из медной фольги путем ее травления. Ширина витков обмотки в направлении движения, как и в обычных двигателях постоянного тока, близка к полюсному делению (т. е. расстоянию по окружности между полюсами магнитной системы двигателя). Токоподвод к обмотке осуществляется с помощью коллектора 3 и щеток 4. На станине двигателя 5 крепится комплект полюсов 6 с обмотками возбуждения 7, размещенных в ряд по направлению движения якоря. Другими частями магнитопровода двигателя являются стальные сердечники 8 и сама станина, выполненная также из ферромагнитного материала. Якорь двигателя вместе со столиком 9 для крепления перемещаемого изделия 10 движется по неподвижным опорам 11 так, что его плоскости с обмотками все время находятся в зазоре между сердечниками 8 и полюсами 6.
Якорь двигателя вместе со столиком 9 для крепления перемещаемого изделия 10 движется по неподвижным опорам 11 так, что его плоскости с обмотками все время находятся в зазоре между сердечниками 8 и полюсами 6.
На принципе работы линейного двигателя основано действие специальных насосов для перекачки электропроводящих жидкостей и в том числе жидких металлов. Такие насосы, часто называемые магнитогидродинамическими, широко применяются в металлургии для транспортировки, дозировки и перемешивания жидкого металла, а также на атомных электростанциях для перекачки жидкометаллического теплоносителя.
Магнитогидродинамические насосы (МГД-насосы) могут быть постоянного или переменного тока. Конструктивная схема МГД-насоса постоянного тока показана на рис. 12.
Первичным элементом — статором двигателя является С-образный электромагнит 1 (для упрощения рисунка его обмотка возбуждения не показана). В воздушный зазор электромагнита помещается трубопровод 2 с жидким металлом. С помощью электродов 3, приваренных к стенкам трубопровода, через жидкий металл пропускается постоянный ток от внешнего источника. Часто обмотка возбуждения включается последовательно в цепь электродов 3.
Часто обмотка возбуждения включается последовательно в цепь электродов 3.
Рис. 12. Магнитогидродинамический насос постоянного тока.
При возбуждении электромагнита на металл в зоне прохождения постоянного тока начинает действовать электромагнитная сила аналогично тому, как она действовала на проводник с током, помещенным в магнитное поле (см. рис. I). Под действием этой силы металл начнет перемещаться по трубопроводу, причем направление его движения просто определить по известному правилу левой руки.
Один из выполненных МГД-насосов этого типа имеет следующие данные: потребляемая мощность 625 кВт, ток 250 000 А, напряжение 2,5 В, КПД 62,5%. Насос обеспечивает транспортировку жидкого натрия при температуре 800°С со скоростью 12,4 м/с по каналу сечением 53×15,2 см2. Номинальный расход насоса 3670 м3/ч при напоре 39 Н/см2.
Преимуществами МГД-насосов являются отсутствие движущихся механических частей и возможность герметизации канала транспортировки металла.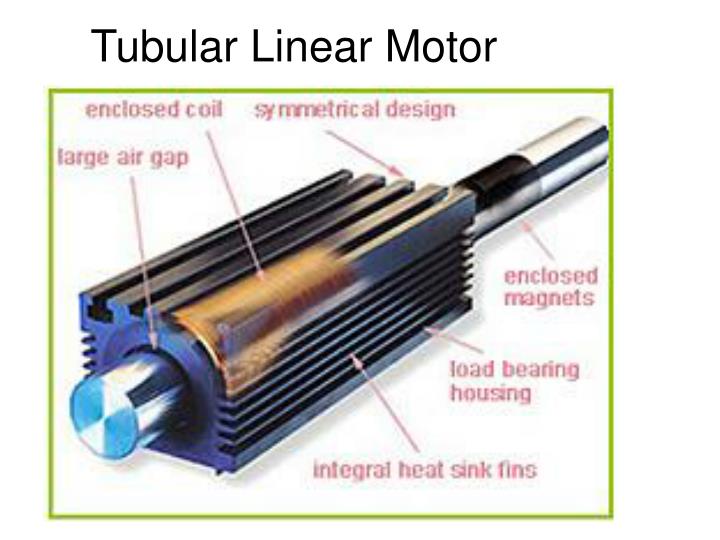
Принцип линейного двигателя используется при разработке реактивных плазменных двигателей космических ракет. Модель такого плазменного двигателя можно также изобразить с помощью схемы, приведенной на рис. 12, где место жидкого металла заняла плазма — высокотемпературный (400°С и более) ионизированный и поэтому токопроводящий газ. Электроэнергию для работы такого двигателя предполагается получить с помощью ядерного реактора.
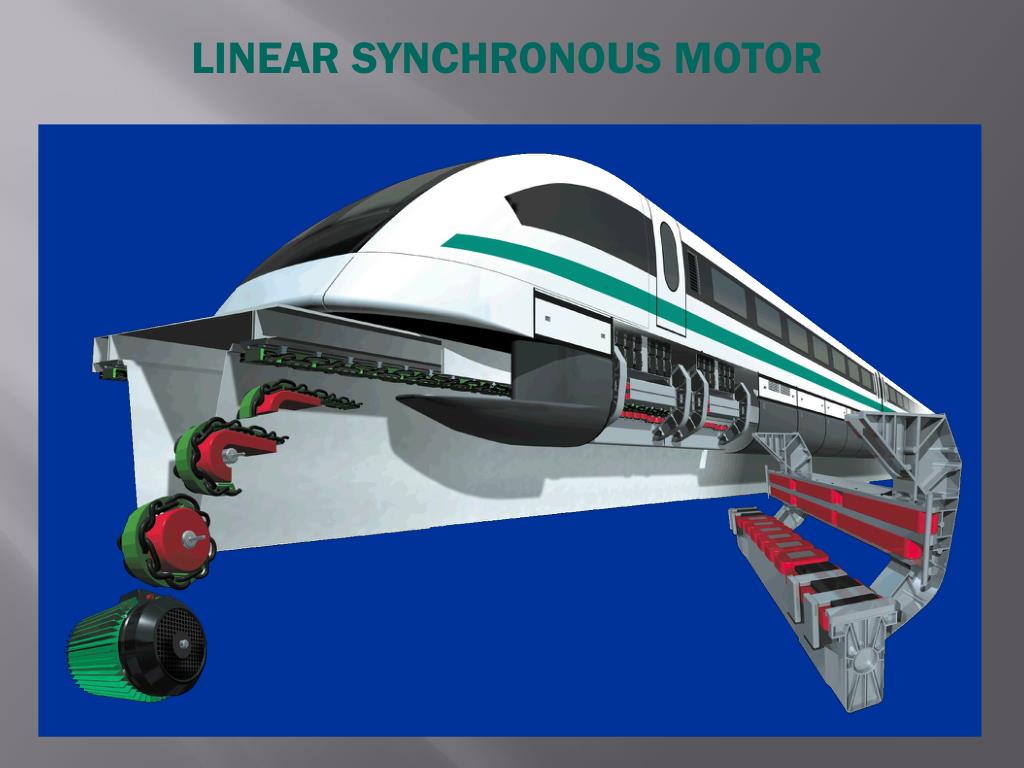
В последние годы все шире используются синхронные линейные двигатели. Основной областью применения этих двигателей, где их преимущества проявляются особенно сильно, является высокоскоростной электрический транспорт. Дело в том, что по условиям нормальной эксплуатации такого транспорта необходимо иметь сравнительно большой воздушный зазор между подвижной частью и вторичным элементом. Асинхронный линейный двигатель имеет при этом очень низкий коэффициент мощности (cosφ), и его применение оказывается экономически невыгодным. Синхронный линейный двигатель, напротив, допускает наличие относительно большого воздушного зазора между статором и вторичным элементом и работает при этом с cosφ, близким к единице.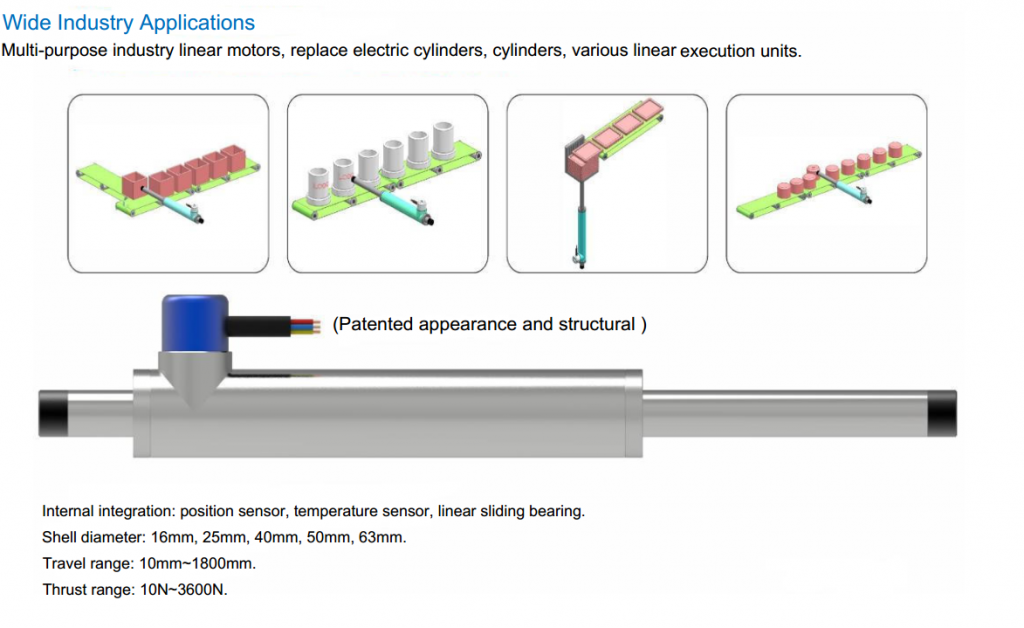
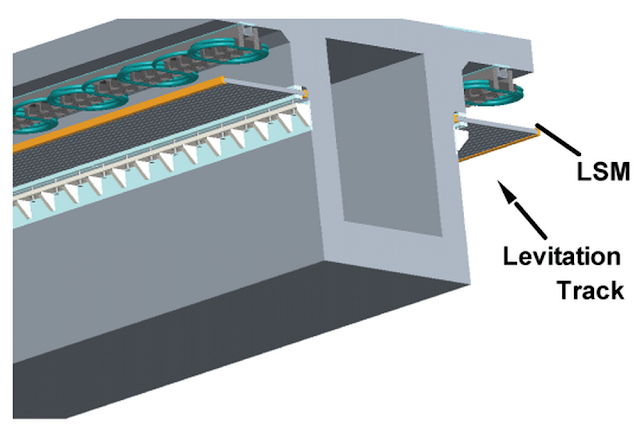
Следует при этом отметить, что применение синхронных линейных двигателей в высокоскоростном транспорте сочетается, как правило, с так называемой магнитной подвеской вагонов и применением сверхпроводящих магнитов и обмоток возбуждения, что позволяет повысить комфортабельность движения и экономические показатели работы подвижного состава.
Рассмотрим конкретные примеры использования линейных синхронных двигателей для транспорта. На рис. 13 показана схема путепровода и вагона электропоезда со скоростью движения 400—500 км/ч, предназначенного для перевозки 100 пассажиров.
Тяговый синхронный линейный двигатель имеет электромагнитное возбуждение с использованием сверхпроводящих магнитов. Обмотка возбуждения 1 состоит из ряда катушек, равномерно укрепленных под днищем вагона 5. В криогенной системе охлаждения обмоток используется жидкий гелий. Плоская трехфазная обмотка переменного тока 2 уложена в бетонное полотно дороги и питается от трехфазного инвертора, преобразующего напряжение постоянного тока в трехфазное напряжение переменного тока (здесь кратко рассмотрен принцип действия инвертора). С помощью инвертора осуществляются пуск, изменение скорости движения и торможение поезда. Номинальный ток обмотки 250 А; длина секции обмоток, одновременно включаемых на напряжение, 5 км. Номинальная мощность двигателя 5,2 МВт, номинальное тяговое усилие 40 кН, cos φ=0,92, коэффициент полезного действия 72%.
С помощью инвертора осуществляются пуск, изменение скорости движения и торможение поезда. Номинальный ток обмотки 250 А; длина секции обмоток, одновременно включаемых на напряжение, 5 км. Номинальная мощность двигателя 5,2 МВт, номинальное тяговое усилие 40 кН, cos φ=0,92, коэффициент полезного действия 72%.
Путепровод 6 представляет собой бетонное полотно шириной 3,7 м, плоский характер поверхности которого выбран с целью снижения накопления льда и снега.
Рис. 13. Линейный синхронный двигатель для привода подвижного состава.
Вагон подвешивается над полотном дороги на высоте 15 см с помощью специальной системы магнитной подвески. Эта система состоит из удлиненных сверхпроводящих электромагнитов 3, расположенных по краям днища вагона, и плоских алюминиевых полос 4, укрепленных в полотне дороги. Принцип работы системы магнитной подвески основывается на действии электродинамических сил, возникающих при взаимодействии потоков сверхпроводящих электромагнитов 3 на борту вагона и вихревых токов, наведенных в алюминиевых полосах 4. Расисты показали, что при использовании магнитной подвески масса вагона оказывается на 20 т меньше, чем при системе подвески на воздушной подушке.
Расисты показали, что при использовании магнитной подвески масса вагона оказывается на 20 т меньше, чем при системе подвески на воздушной подушке.
Для обеспечения поперечной устойчивости поезда при его движении применяется специальная система стабилизации. Она предусматривает укладку дополнительной обмотки (на рисунке не показана) вдоль оси дорожного полотна и основана на взаимодействии токов в этой обмотке с полем тяговых электромагнитов.
Разработанная система электрической тяги с применением описанного выше синхронного линейного двигателя отличается хорошими эксплуатационными показателями, однако для ее работы необходима укладка обмоток в полотно дороги, что удорожает изготовление системы и усложняет ее обслуживание, особенно при значительной протяженности дороги. В связи с этим были разработаны конструкции линейных синхронных двигателей, которые не требуют укладки обмоток в железнодорожное полотно. К их числу относятся линейные синхронные двигатели с так называемым униполярным возбуждением и когтеобразными полюсами. Двигатели того и другого исполнения были использованы для привода 50-тонного состава со скоростью движения 480 км/ч. Параметры двигателей: номинальная мощность 1340 кВт, тяговое усилие 106 Н, частота напряжения переменного тока 350 Гц. Расчетное значение коэффициента мощности равно 1, а коэффициента полезного действия 91— 96%. Масса двигателей при зазоре между составом и вторичным элементом в 1,5 см не превышает 4 т.
Двигатели того и другого исполнения были использованы для привода 50-тонного состава со скоростью движения 480 км/ч. Параметры двигателей: номинальная мощность 1340 кВт, тяговое усилие 106 Н, частота напряжения переменного тока 350 Гц. Расчетное значение коэффициента мощности равно 1, а коэффициента полезного действия 91— 96%. Масса двигателей при зазоре между составом и вторичным элементом в 1,5 см не превышает 4 т.
Рис. 14. Линейный синхронный двигатель с униполярным возбуждением.
На рис. 14 показана конструктивная схема синхронного линейного двигателя с униполярным возбуждением. Двигатель имеет два статора 1, установленных на подвижной части состава. Бегущее магнитное поле создается с помощью обмоток 2, подключаемых к сети переменного тока. Статоры соединяются магнитопроводом 3, на котором расположена обмотка униполярного возбуждения 4. Эта обмотка создает постоянный по направлению магнитный поток Фп, который пронизывает ферромагнитный вторичный элемент 5, укладываемый в..jpg) путепровод. Взаимодействие бегущего магнитного поля с намагниченным вторичным элементом создает силу тяги подвижного состава.
путепровод. Взаимодействие бегущего магнитного поля с намагниченным вторичным элементом создает силу тяги подвижного состава.
Сопоставление линейных синхронных двигателей с униполярным возбуждением и когтеобразными полюсами с асинхронным линейным двигателем на то же тяговое усилие показало, что последний имеет худший коэффициент мощности (около 0,6), более низкий КПД (около 80%) и большую массу на единицу мощности двигателя.
- Назад
- Вперёд
- Вы здесь:
- Главная
- Оборудование
- Эл. машины
- Генераторы ЕСС
Еще по теме:
- Испытания по определению электрических величин электрических машин
- Основные повреждения электродвигателей
- Двигатели типа ДАБ
- Методы сушки электрических машин
- Автоматизация испытаний электрических машин
Цилиндрический линейный двигатель — новый этап эволюции электроэрозионных станков
Основные изменения, происходившие в приводной части станков за последний век, связаны с постепенным приближением двигателя к рабочему органу. На этом пути были массивные коробки подач с огромным количеством промежуточных элементов кинематической цепи, двух-трех ступенчатые редукторы, ременные передачи, прямые приводы через муфту. Всегда переход к следующему этапу был связан с применением последних научных разработок, получивших тем или иным способом свое приложение в станкостроении, появлением новых технологий либо удешевлением существующих. Изначально крайне дорогими являлись приводы на основе регулируемых электродвигателей и с шарико-винтовыми парами (ШВП), поэтому лишь отдельные производители находили целесообразным их использование. В наши дни уже сложно представить современный станок, который бы обошелся без ШВП или в котором величина подачи регулируется ступенчато, за счет перемещения блоков зубчатых колес.
На этом пути были массивные коробки подач с огромным количеством промежуточных элементов кинематической цепи, двух-трех ступенчатые редукторы, ременные передачи, прямые приводы через муфту. Всегда переход к следующему этапу был связан с применением последних научных разработок, получивших тем или иным способом свое приложение в станкостроении, появлением новых технологий либо удешевлением существующих. Изначально крайне дорогими являлись приводы на основе регулируемых электродвигателей и с шарико-винтовыми парами (ШВП), поэтому лишь отдельные производители находили целесообразным их использование. В наши дни уже сложно представить современный станок, который бы обошелся без ШВП или в котором величина подачи регулируется ступенчато, за счет перемещения блоков зубчатых колес.
Характерно то, что на каждом этапе никогда сразу не появлялась конструкция, оптимальная во всех отношениях. Совершенствование всегда происходило путем проб и ошибок, последовательной доработкой и устранением недостатков. В конечном итоге повсеместное распространение получали конфигурации узлов, прошедшие проверку временем, длительной эксплуатацией и доказавшие свою экономическую эффективность.
В конечном итоге повсеместное распространение получали конфигурации узлов, прошедшие проверку временем, длительной эксплуатацией и доказавшие свою экономическую эффективность.
Рис. 1. ШВП
Такой вот отработанной, давно зарекомендовавшей себя, проверенной конструкцией является на данный момент привод с использованием ШВП, связанной с двигателем напрямую посредством муфты, реже ремня или зубчатой передачи. Производство всех элементов привода уже давно отработано, технологии оптимизированы, поэтому и стоимость вполне конкурентоспособна.
Тем не менее, желание конструкторов максимально сократить кинематическую цепь никуда не исчезло. Последней ступенькой, через которую надо было перешагнуть, стала шарико-винтовая пара. И сделать это позволили линейные двигатели.
Применение линейных двигателей в приводах подач современных станков является тем закономерным результатом, к которому привела их эволюция на протяжении десятков последних лет. Однако сейчас использование линейных приводов находится лишь на начальной стадии.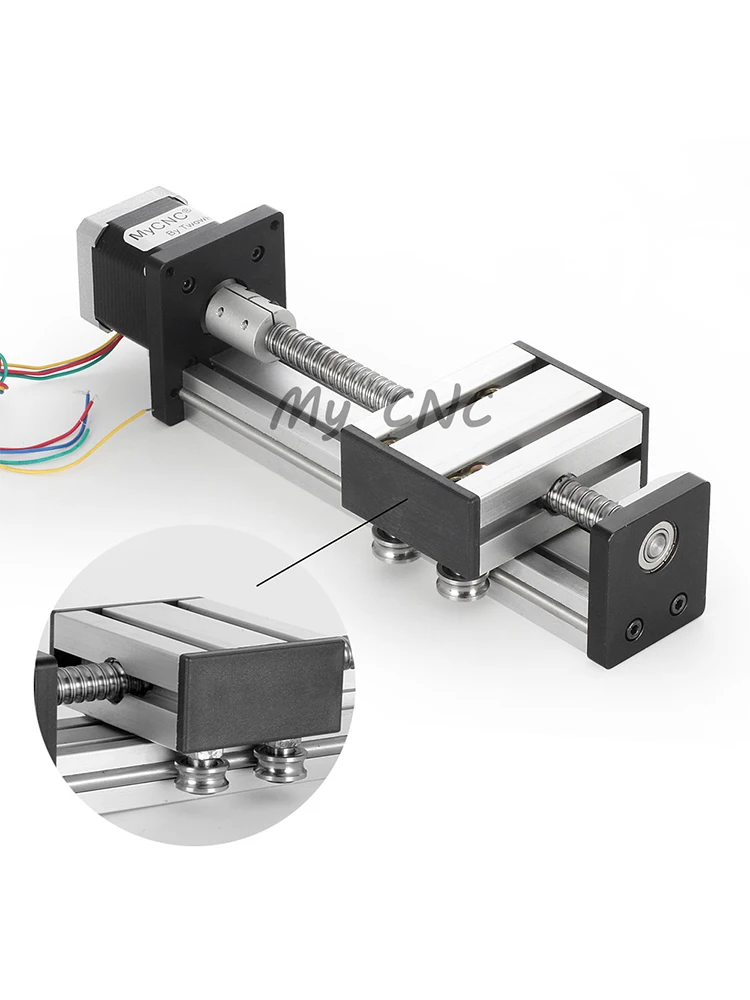 Технология их изготовления до сих пор не до конца автоматизирована, цена высока, а применение далеко не всегда уместно. Линейный двигатель не получил своего «эталонного» воплощения (или ряда таких воплощений, испытанных временем, выбор из которых производится в зависимости от специфики использования) и существуют различные конструктивные исполнения, которые, несмотря на ряд безусловных общих преимуществ, значительно отличаются друг от друга, имея различные сильные и слабые стороны. Это тот этап, который проходит любая инновация. И все больше производителей останавливаются на линейных двигателях для приводов подач, причем как для оборудования специфического, такого, как электроэрозионные станки, так и для фрезерных и токарных станков.
Технология их изготовления до сих пор не до конца автоматизирована, цена высока, а применение далеко не всегда уместно. Линейный двигатель не получил своего «эталонного» воплощения (или ряда таких воплощений, испытанных временем, выбор из которых производится в зависимости от специфики использования) и существуют различные конструктивные исполнения, которые, несмотря на ряд безусловных общих преимуществ, значительно отличаются друг от друга, имея различные сильные и слабые стороны. Это тот этап, который проходит любая инновация. И все больше производителей останавливаются на линейных двигателях для приводов подач, причем как для оборудования специфического, такого, как электроэрозионные станки, так и для фрезерных и токарных станков.
Использование линейных двигателей оправдано для прецизионного оборудования и в том случае, когда большую роль играет динамическая характеристика привода: максимально допустимые ускорения, величины максимально и минимально допустимых скоростей. Тем не менее, даже на оборудование такого класса линейные привода устанавливаются, зачастую, лишь в маркетинговых целях, ведь ультрапрецизионное оборудование по умолчанию должно быть «напичкано» инновациями, позволяющими добиться высочайшей точности, недоступной конкурентам. При этом позабытыми оказываются как экономическая эффективность использования таких приводов, которая приводит к неоправданному повышению стоимости обработки, так и технологическая необходимость такого решения в целом.
При этом позабытыми оказываются как экономическая эффективность использования таких приводов, которая приводит к неоправданному повышению стоимости обработки, так и технологическая необходимость такого решения в целом.
В свете вышесказанного обращает на себя внимания стратегия, выбранная компанией Mitsubishi Electric. Более 40 лет назад компания представила свой первый электроэрозионный проволочно-вырезной станок, а уже в 1978 году — серийный высокоскоростной и высокоточный 4-х координатный электроэрозионный проволочно-вырезной обрабатывающий станок.
Рис. 2. Mitsubishi NA1200
Сегодня ноу-хау, накопленное за многие десятилетия в сочетании с интенсивной исследовательской работой, остаются решающим критерием при разработке новых систем электроэрозионной обработки. Являясь одним из ведущих производителей электроэрозионного оборудования и в то же время одним из крупнейших производителей линейных двигателей, японская фирма вплоть до недавнего времени не устанавливала их на свои станки.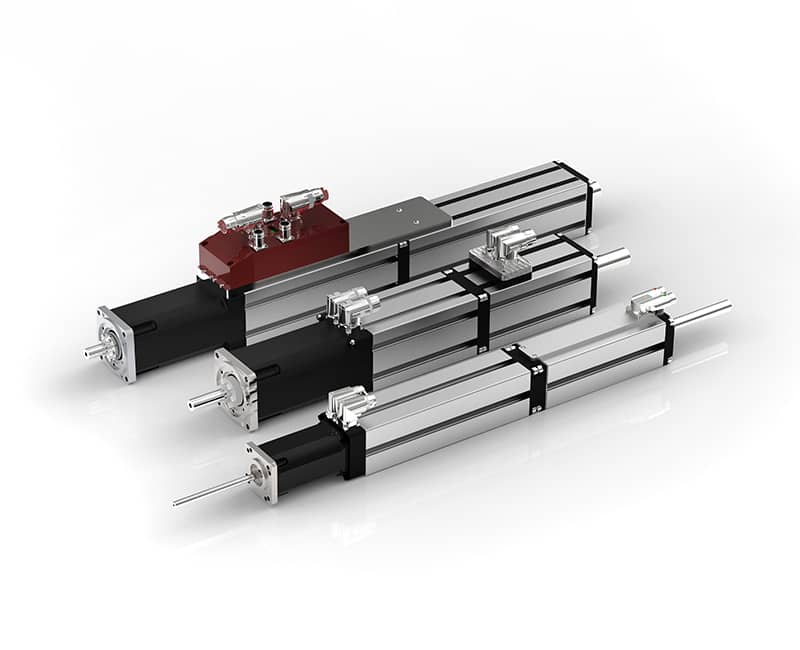 Лишь в 2009 году на станках серии NA (рис. 2) впервые были применены линейные двигатели (цилиндрические). Возникает вопрос, почему гигантская корпорация отказывается от использования в своем оборудовании своих же собственных компонентов, несмотря на то, что эти компоненты (линейные двигатели) успешно продаются по всему миру?
Лишь в 2009 году на станках серии NA (рис. 2) впервые были применены линейные двигатели (цилиндрические). Возникает вопрос, почему гигантская корпорация отказывается от использования в своем оборудовании своих же собственных компонентов, несмотря на то, что эти компоненты (линейные двигатели) успешно продаются по всему миру?
Стоит внимательно присмотреться к конкретным конструкциям, чтобы получить ответ на этот вопрос.
На сегодняшний день наиболее распространенными в металлообрабатывающих станках являются плоские линейные двигатели. Принципиальная схема такого двигателя приведена на рис. 3.
Рис. 3. Плоский линейный двигатель: принципиальная схема
Двигатель состоит из двух основных частей: ползуна, представляющего собой сердечник 1 с обмотками 2 и неподвижной частью с постоянными магнитами 3.
Как раз наличие сердечника и является основным источником характерных данному типу двигателей недостатков:
Значительное тепловыделение при работе.

При функционировании линейного двигателя через обмотки проходит электрический ток и, согласно закону Джоуля-Ленца, происходит их нагрев. Это не является особенностью данной конкретной конструкции и свойственно любому проводнику с током. Однако не для любого проводника с током тепловые деформации играют столь существенную роль, как в металлообработке, особенно когда речь идет о прецизионном оборудовании!
Кроме того дополнительным источником тепла является сердечник, в котором при движении ползуна появляются вихревые токи Фуко, способствующие его дополнительному нагреву.
Усугубляет ситуацию то, что отвод излишнего тепла в окружающую среду крайне затруднен. Сверху на ползуне смонтирован стол, снизу на минимальном расстоянии находится плита с постоянными магнитами. Таким образом, практически все тепло, выделяющееся при работе двигателя, передается на стол станка, вызывая тепловые деформации, ведущие к перекосам рабочего органа и, как следствие, недопустимым погрешностям обработки, чрезмерному износу направляющих.
Рис. 4. Тепловыделение в плоском линейном двигателе
Максимальная температура может превышать 100°С! Безусловно, ни о какой высокой точности говорить при таких значениях температуры нельзя. Поэтому использование плоского линейного двигателя абсолютно нецелесообразно без мощной системы охлаждения.
Оснащение конструкции охлаждающим контуром практически полностью решает проблему чрезмерного тепловыделения, но очевидно, что такая мощная система охлаждения значительно увеличивает стоимость двигателя, расходы на эксплуатацию станка и напрямую отражается на себестоимости обработки.
Наличие постоянной силы магнитного притяжения.
На сердечник плоского линейного двигателя постоянно воздействует сила притяжения со стороны магнитов.
Рис. 5. Сила притяжения, воздействующая на сердечник
Эта сила воздействует постоянно и не изменяет своего значения при работе двигателя. Согласно данным каталога фирмы Mitsubishi Electric величина силы магнитного притяжения колеблется в пределах 500–7000Н в зависимости от типоразмера линейного двигателя.
Таким образом, возрастает нагрузка на направляющие станка, что усиливает их износ, кроме того увеличиваются и потери на трение в направляющих, и, как следствие, снижается КПД привода.Кроме того очень важно, что сила магнитного взаимодействия напрямую зависит от зазора Δ между частями плоского линейного двигателя. При отклонении зазора от номинального сила может увеличиваться или уменьшаться в пределах 30%.
Рис. 6. Зависимость силы притяжения от зазора в двигателе
Рассмотренная зависимость позволяет говорить о высокой чувствительности плоского линейного двигателя к изменению величины воздушного зазора между его частями. Практически это влечет к появлению дополнительных сложностей, возникающих при сборке и монтаже приводов с плоскими линейными двигателями.
Кроме нормальной составляющей силового взаимодействия магнитов и сердечника, существует также воздействие, направленное параллельного вектору перемещения двигателя. Подробнее об этом, а также о последствиях расписано в следующем пункте.
Ограничения по плавности движения.
Общее поле, создаваемое постоянными магнитам (что видно и из рис. 7), будет являться неоднородным: в каких-то местах плотность потока индукции будет выше, чем в других. Силовое взаимодействие между сердечником плоского линейного двигателя и магнитами имеет составляющую, параллельную направлению перемещения ползуна. Конструктивно эти явления вызваны в первую очередь наличием расстояния между магнитами, которое приводит к неоднородности магнитного поля.
Рис. 7. Поле постоянных магнитов
Горизонтальная составляющая силового воздействия изменяется соответственно изменению вектора и плотности потока магнитной индукции: в каких-то местах она достигает своего максимума, в каких-то практически равна нулю. Следствием этого является наличие так называемых «предпочтительных положений» у плоского линейного двигателя. Т.е. на всей величине хода присутствуют положения, которые соответствуют минимуму потенциальной энергии.
Ползун сам стремится занять такое положение, а для вывода из него требуется приложить усилие.Экспериментально полученные данные, отражающие колебания выходного усилия привода, приведены на рис. 8.
Рис. 8. Колебания выходного усилия
Характеристика на рисунке была получена следующим образом: при перемещении двигателя с постоянной скоростью с усилителя снимаются данные об изменении тока. Таким образом, при известной скорости двигателя и его силовой постоянной, получается зависимость, приведенная на рисунке.
Такие колебания силы накладывают определенные ограничения на плавность движения двигателя, на качество получаемой поверхности, если речь идет о приводе металлообрабатывающего станка, и на точность обработки. Основные методы борьбы: установка магнитов под углом, использование программных средств и прочее, позволяют значительно снизить амплитуду колебания, но не устраняют его полностью, к тому же способствуют удорожанию изготовления двигателя и станка в целом.
На рис. 9 наглядно показаны изменения поля, создаваемого постоянными магнитами после их установки под углом.
Рис. 9. Изменение пространственного распределения плотности магнитного потока при использовании конструкции с повернутыми магнитами
На рис. 10 приведено уменьшение колебаний силы при использовании измененной конструкции.
Рис. 10. Уменьшение колебаний силы при установке магнитов под углом
Общая неэффективность конструкции.
Конструкция плоского линейного двигателя изначально геометрически неэффективна. Как видно из рис. 11, для совершения работы по перемещению задействована лишь «верхняя» часть магнитного потока. Таким образом, крайне дорогостоящие редкоземельные магниты, которые применяются во всех типах линейных двигателей, используются менее чем на 50%.
Рис. 11. Распределение магнитного потока

 Таким образом, возрастает нагрузка на направляющие станка, что усиливает их износ, кроме того увеличиваются и потери на трение в направляющих, и, как следствие, снижается КПД привода.
Таким образом, возрастает нагрузка на направляющие станка, что усиливает их износ, кроме того увеличиваются и потери на трение в направляющих, и, как следствие, снижается КПД привода.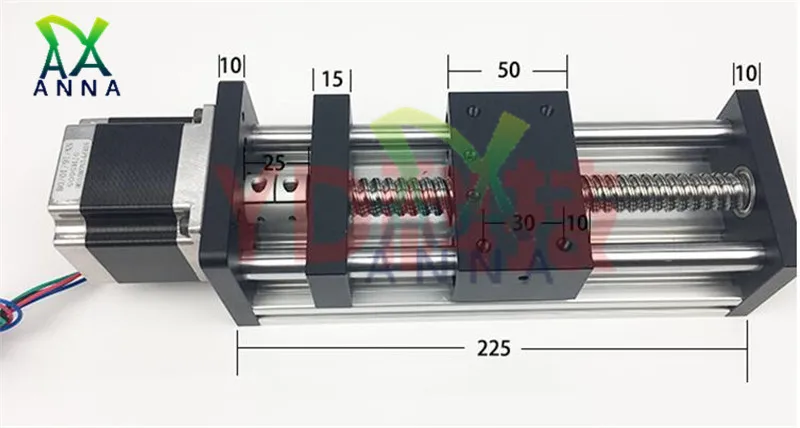
 Ползун сам стремится занять такое положение, а для вывода из него требуется приложить усилие.
Ползун сам стремится занять такое положение, а для вывода из него требуется приложить усилие.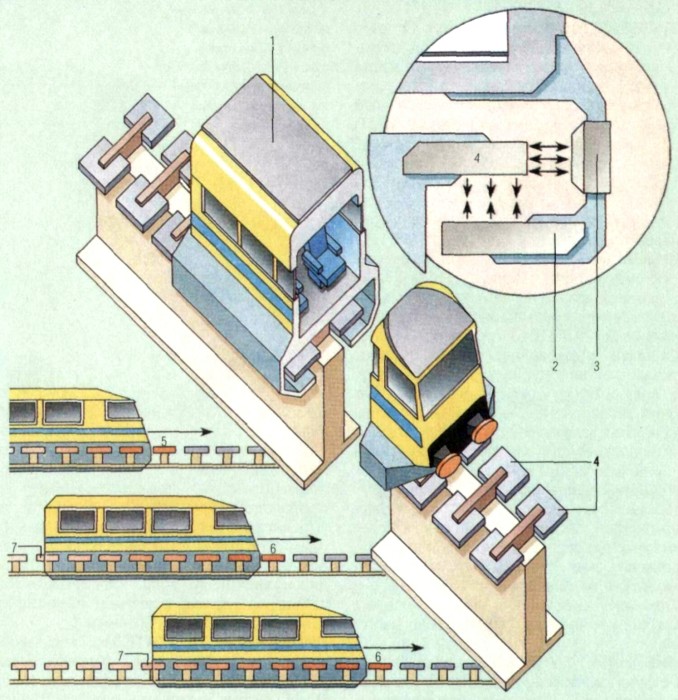
Рассмотрим теперь линейный двигатель, использованный компанией Mitsubishi Electric. В ультрапрецизионном станке Mitsubishi NA 1200 в качестве приводов по осям X, Y, U, V использованы цилиндрические линейные двигатели
В ультрапрецизионном станке Mitsubishi NA 1200 в качестве приводов по осям X, Y, U, V использованы цилиндрические линейные двигатели
Принципиальная схема цилиндрического линейного двигателя представлена на рис. 12. Особенность его конструкции заключается в том, что обмотки 2 расположены вокруг сформированных в виде цилиндра постоянных магнитов 1, а сердечника нет в принципе!
Рис. 12. Цилиндрический линейный двигатель: принципиальная схема
Цилиндрический линейный двигатель, благодаря своей конструкции, лишен всех рассмотренных выше недостатков плоского линейного двигателя. Остановимся подробнее на каждом из них.
Тепловыделение.
Цилиндрический линейный двигатель не требует специальной отдельной системы охлаждения. То тепло, которое неизбежно выделяется в обмотках, эффективно отводится окружающей средой и непосредственно на стол станка передается незначительная его часть.
Плюс в конструкции нет сердечника — источника дополнительного нагрева под действием вихревых токов.Рис. 13. Схема отвода тепла в цилиндрическом линейном двигателе
В результате испытаний (перемещение стола на длину 200 мм со скоростью 1 м/с, ускорением 1 G, задержкой 1 с в каждом из концов хода) было установлено, что повышение температуры стола не превышает 5°С. Графически результаты представлены на рис. 14.
Рис. 14. Прирост температуры стола станка с цилиндрическим линейным двигателем
В принципе, при более тяжелых режимах работы температура стола может подниматься и выше оговоренных 5°С, но в любом случае значительно меньше, чем у плоского линейного двигателя.
Несмотря на это, в станках серии NA предусмотрен контур охлаждения линейных двигателей, интегрированный в общую систему термической стабилизации и динамической термической компенсации станка. Он позволяет практически ликвидировать нагрев стола, связанный с тепловыделением в обмотках линейного двигателя.
И как следствие — избавиться от тех минимальных погрешностей, которые он вызывает и которые способны оказывать воздействие на работу столь точного оборудования. При этом необходимая мощность системы охлаждения значительно меньше, а контур значительно проще, чем у плоского линейного двигателя.Нет ограничений по плавности движения.
В связи с тем, что в конструкции цилиндрического линейного двигателя нет сердечника, ему не свойственны недостатки, связанные с его наличием.
Между цилиндром и обмотками ползуна не возникает дополнительных силовых воздействий (ни в радиальном, ни в осевом направлении), поэтому движение при работе происходит плавно, без скачков нагрузки или скорости. На рис. 15 и 16 соответственно представлены графики изменения скорости при движении на высоких и низких скоростях.
Благодаря симметричной конструкции и отсутствию сердечника, колебания величины зазора принципиально не влияют на работу цилиндрического линейного двигателя, что облегчает его сборку и изготовление.
Рис. 15. Погрешность скорости (область высоких скоростей)
Рис. 16. Погрешность скорости (область низких скоростей)
Эффективное использование всего магнитного потока.
Рис. 17. Эффективное использование всего магнитного потока
Благодаря симметричности конструкции, в цилиндрическом линейном двигателе используется весь магнитный поток. Это дает дополнительное экономическое преимущество перед плоской конфигурацией, ведь для достижения того же результата требуется практически в 2 раза меньше редкоземельных магнитов, либо в 2 раза менее сильные магниты. Это весьма существенное преимущество, так как стоимость постоянных редкоземельных магнитов составляет немалую долю от общей стоимости линейного двигателя.
Ремонтопригодность.
Благодаря отсутствию механического контакта, отпадает необходимость в смазке, двигатель работает абсолютно бесшумно и не подвергается износу. Однако в случае необходимости демонтаж и монтаж цилиндрического линейного двигателя, по сравнению даже с ШПВ, осуществляется значительно проще и быстрее и не требует дополнительной юстировки, что существенно повышает его ремонтопригодность.
 Плюс в конструкции нет сердечника — источника дополнительного нагрева под действием вихревых токов.
Плюс в конструкции нет сердечника — источника дополнительного нагрева под действием вихревых токов. И как следствие — избавиться от тех минимальных погрешностей, которые он вызывает и которые способны оказывать воздействие на работу столь точного оборудования. При этом необходимая мощность системы охлаждения значительно меньше, а контур значительно проще, чем у плоского линейного двигателя.
И как следствие — избавиться от тех минимальных погрешностей, которые он вызывает и которые способны оказывать воздействие на работу столь точного оборудования. При этом необходимая мощность системы охлаждения значительно меньше, а контур значительно проще, чем у плоского линейного двигателя.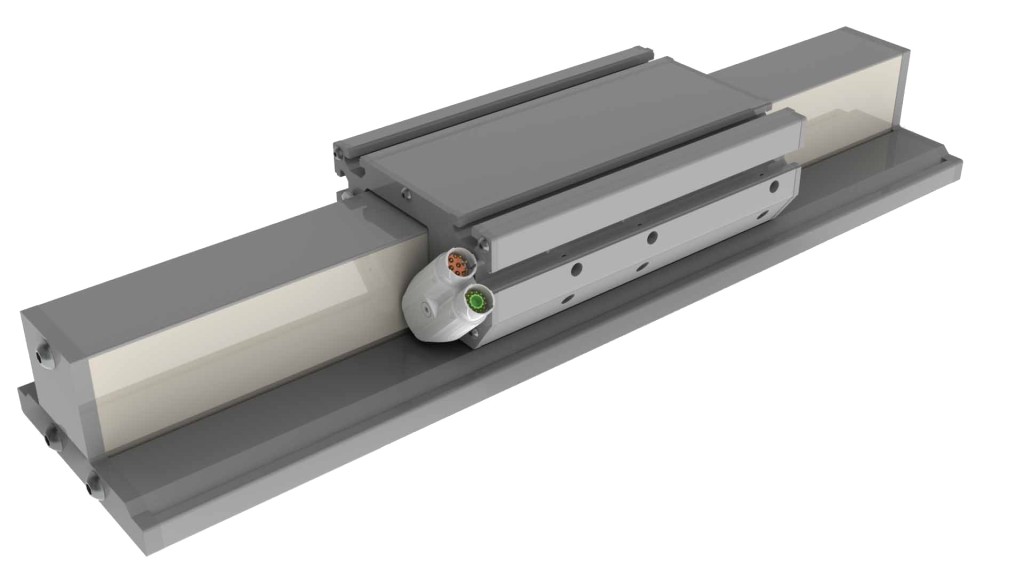
Вернемся к вопросу, который прозвучал в начале: почему же лишь сравнительно недавно линейные двигатели появились в станках Mitsubishi? Теперь ответить на него значительно проще.
Рис. 18. Mitsubishi MV1200R
Очевидно, что специалисты компании, в угоду желанию быть на гребне волны технического прогресса, не стали отдавать предпочтение плоским линейным двигателям, которые не устраивали их в первую очередь по экономическим показателям: высокая собственная стоимость, высокая стоимость эксплуатации и ремонта, которые неминуемо переносятся на стоимость получаемой на станке детали. До тех пор, пока использование классических приводов с ШВП было оправданно экономически и при этом позволяло добиваться высочайшей точности обработки, инженеры компании лишь присматривались к тому, как покажут себя линейные двигатели применительно к электроэрозионным станкам. В результате решение нашлось. На рынке появился относительно новый тип линейных двигателей — цилиндрический линейный двигатель (ЦЛД), который обладает рядом преимуществ по сравнению с аналогами и весьма эффективен с экономической точки зрения: низкое потребление энергии, простота производства и сборки..jpg) Все те недостатки плоских линейных двигателей, рассмотренные выше, не свойственны цилиндрическим.
Все те недостатки плоских линейных двигателей, рассмотренные выше, не свойственны цилиндрическим.
В 2009 году в производство была запущена серия ультрапрецизионных станков NA с ЦЛД. Эти станки великолепно зарекомендовали себя и заставили задуматься японских специалистов о модернизации и остальных станков, производимых фирмой. В марте 2012 года компания Mitsubishi Electric объявила о начале производства новой серии MV с ЦЛД и продемонстрировала эти станки на выставке «INTERMOLD 2012» в Осаке (Япония). Серия MV призвана заменить прекрасно себя зарекомендовавшие серии FA и BA. Притом, что новые станки обладают великолепными технологическими возможностями и превосходной точностью, главное их преимущество — в экономичности и чрезвычайно низких текущих издержках. Во многом благодаря использованию ЦЛД, станки серии MV потребляют на 69% меньше энергии, чем их предшественники и на 42% позволяют снизить стоимость обработки при 30% сокращении времени! Это действительно потрясающий результат, который позволяет утверждать, что ЦЛД будут и дальше успешно использоваться в станках компании Mitsubishi Electric.
Применение ЦЛД потребовало разработки и применения самой передовой технологии управления с использованием сверхскоростной оптоволоконной связи и системной коммуникацией в режиме реального времени. Безусловно, нас ждет дальнейшее совершенствование конструкции и системы управления, но уже сейчас можно достаточно уверенно утверждать, что применение ЦЛД в электроэрозионных станках — это инновационное решение, которое ознаменовало собой новый этап эволюции в станкостроении.
Что такое линейный двигатель?
Если бы вы разрезали вращающийся серводвигатель и положили его горизонтально, у вас был бы, по сути, линейный двигатель. Ротор с постоянными магнитами становится неподвижной частью линейного двигателя (также называемой вторичной, или магнитной пластиной), а статор, содержащий обмотки катушки, становится подвижной частью (также называемой первичной, или блоком катушки).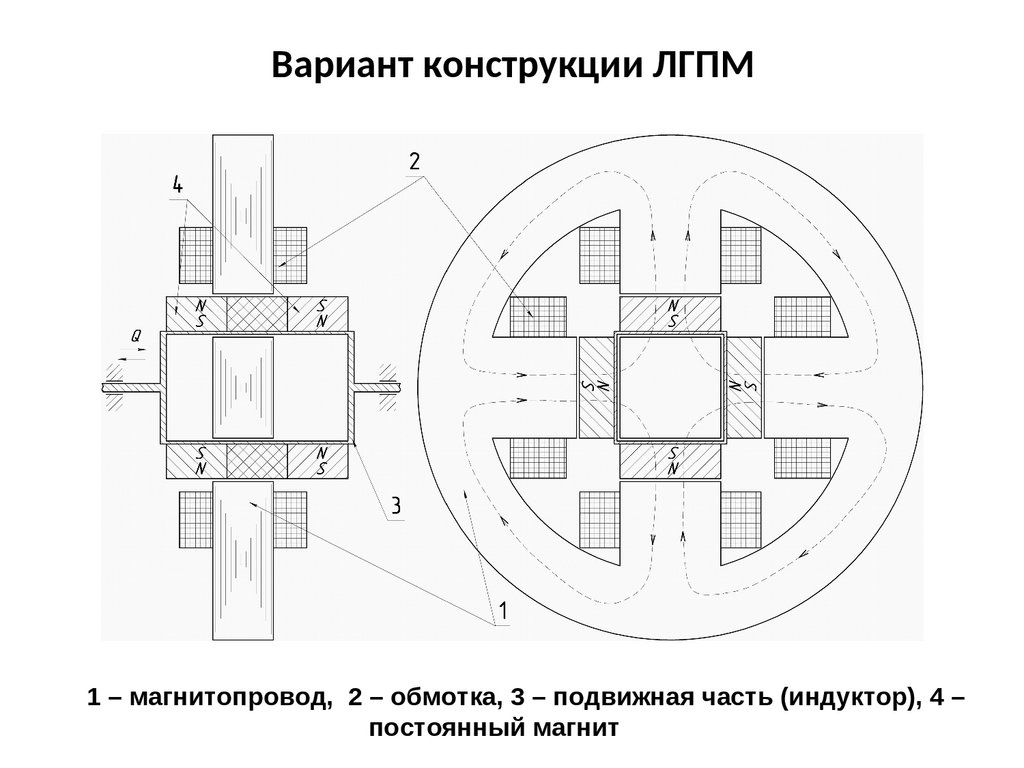
Линейные двигатели работают с источником питания переменного тока и сервоконтроллером, которые часто аналогичны используемым для поворотных серводвигателей. Первичная часть линейного двигателя подключена к источнику питания для создания магнитного поля. Изменяя фазу тока в катушках, меняется полярность каждой катушки. Силы притяжения и отталкивания между катушками в первичной части и магнитами во вторичной части заставляют первичную часть двигаться и создают линейную силу. Скорость изменения тока определяет скорость движения, а сила тока определяет генерируемую силу.
Для получения дополнительной информации и спецификаций, пожалуйста, посетите наши страницы продуктов без железа и с железным сердечником.
Свяжитесь с нами напрямую
Майк Ролинк и Стефан Янсен
Инженеры по приложениям
«У вас есть вопрос о моторе? Или вам нужна техническая поддержка во время установки? Позвоните нам, и один из наших инженеров по применению поможет и поддержит вас на протяжении всего процесса».
+31 546 536 300
Задайте свой вопрос
«*» указывает на обязательные поля
First name*
Last name*
Company name*
Email*
Phone number
Postal code*
Country*
Country *AfghanistanAlbaniaAlgeriaAmerican SamoaAndorraAngolaAnguillaAntarcticaAntigua and BarbudaArgentinaArmeniaArubaAustraliaAustriaAzerbaijanBahamasBahrainBangladeshBarbadosBelarusBelgiumBelizeBeninBermudaBhutanBoliviaBonaire, Sint Eustatius and SabaBosnia and HerzegovinaBotswanaBouvet IslandBrazilBritish Indian Ocean TerritoryBrunei DarussalamBulgariaBurkina FasoBurundiCabo VerdeCambodiaCameroonCanadaCayman IslandsCentral African RepublicChadChileChinaChristmas IslandCocos IslandsColombiaComorosCongoCongo, Democratic Republic of theCook IslandsCosta RicaCroatiaCubaCuraçaoCyprusCzechiaCôte d’IvoireDenmarkDjiboutiDominicaDominican RepublicEcuadorEgyptEl SalvadorEquatorial GuineaEritreaEstoniaEswatiniEthiopiaFalkland IslandsFaroe IslandsFijiFinlandFranceFrench GuianaFrench PolynesiaFrench Southern TerritoriesGa bonGambiaGeorgiaGermanyGhanaGibraltarGreeceGreenlandGrenadaGuadeloupeGuamGuatemalaGuernseyGuineaGuinea-BissauGuyanaHaitiHeard Island and McDonald IslandsHoly SeeHondurasHong KongHungaryIcelandIndiaIndonesiaIranIraqIrelandIsle of ManIsraelItalyJamaicaJapanJerseyJordanKazakhstanKenyaKiribatiKorea, Democratic People’s Republic ofKorea, Republic ofKuwaitKyrgyzstanLao People’s Democratic RepublicLatviaLebanonLesothoLiberiaLibyaLiechtensteinLithuaniaLuxembourgMacaoMadagascarMalawiMalaysiaMaldivesMaliMaltaMarshall IslandsMartiniqueMauritaniaMauritiusMayotteMexicoMicronesiaMoldovaMonacoMongoliaMontenegroMontserratMoroccoMozambiqueMyanmarNamibiaNauruNepalNetherlandsNew CaledoniaNew ZealandNicaraguaNigerNigeriaNiueNorfolk IslandNorth MacedoniaNorthern Mariana IslandsNorwayOmanPakistanPalauPalestine, State ofPanamaPapua New GuineaParaguayPeruPhilippinesPitcairnPolandPortugalPuerto RicoQatarRomaniaRussian FederationRwandaRéunionSaint BarthélemySaint Helena, Ascension and Tristan da CunhaSaint Kitt s and NevisSaint LuciaSaint MartinSaint Pierre and MiquelonSaint Vincent and the GrenadinesSamoaSan MarinoSao Tome and PrincipeSaudi ArabiaSenegalSerbiaSeychellesSierra LeoneSingaporeSint MaartenSlovakiaSloveniaSolomon IslandsSomaliaSouth AfricaSouth Georgia and the South Sandwich IslandsSouth SudanSpainSri LankaSudanSurinameSvalbard and Jan MayenSwedenSwitzerlandSyria Arab RepublicTaiwanTajikistanTanzania, the United Republic ofThailandTimor-LesteTogoTokelauTongaTrinidad and TobagoTunisiaTurkmenistanTurks and Caicos IslandsTuvaluTürkiyeUS Minor Outlying IslandsUgandaUkraineUnited Arab ЭмиратыВеликобританияСоединенные ШтатыУругвайУзбекистанВануатуВенесуэлаВьетнамВиргинские острова, Британские Виргинские острова, СШАУоллис и ФутунаЗападная СахараЙеменЗамбияЗимбабвеАландские острова
Выберите ваш продукт
Выберите ваш продуктМоментные двигателиЛинейные двигателиЛинейные двигатели с железным сердечникомЛинейные двигатели без железаВакуумные двигателиДвигатели на заказ
Ваше сообщение
Подпишитесь, чтобы получать наши последние новости
Подпишитесь на наши новости, чтобы получать последние новости и обновления от Tecnotion.
Линейные двигатели: время для откровенного разговора
Линейное движение требуется для всех видов промышленных систем и оборудования, от станков и конвейерных лент до решений для сканирования и печати. Обычный двигатель, соединенный с подходящим компонентом механического привода, обычно способствует этому прямолинейному движению. Но что, если бы существовала концепция, позволяющая сделать линейное движение более эффективным за счет использования прямого привода? Ну, есть. Линейные двигатели неуклонно завоевывают долю промышленного рынка в течение последних двух десятилетий. Для тех, кто хочет узнать больше, читайте дальше.
Как работают линейные двигатели?
Линейный двигатель обеспечивает прямую связь с нагрузкой. Этот принцип прямого привода основан на использовании силы магнитного поля для перемещения катушки вдоль дорожки постоянных магнитов. Чтобы визуализировать эту конфигурацию, представьте тип электромагнитной «рейки и шестерни», где шестерня — это вращающееся магнитное поле, а рейка — это статические постоянные магниты. Притяжение и отталкивание, возникающие между катушками и дорожкой постоянного магнита, создают необходимое движение.
Притяжение и отталкивание, возникающие между катушками и дорожкой постоянного магнита, создают необходимое движение.
Источник: Tecnotion
Чтобы объяснить немного подробнее, переменный трехфазный ток проходит через катушки, создавая вращающееся (или «поступательное» в случае линейного двигателя) электромагнитное поле. Это электромагнитное поле взаимодействует с постоянным магнитом, и результирующая сила в конечном итоге приводит к преобразованию электрической энергии в линейную механическую энергию с высоким уровнем эффективности. Скорость изменения тока определяет скорость движения, а сила тока определяет генерируемую силу.
Линейные двигатели в работе не отличаются от роторных двигателей, но в том смысле, что они открываются и раскатываются в плоском виде. Ротор с действующими постоянными магнитами становится неподвижной частью линейного двигателя, а статор (с катушками) становится подвижной частью.
Основные преимущества
Одним из основных преимуществ линейных двигателей является устранение так называемых «эластичных» компонентов трансмиссии, таких как редукторы и муфты, которые могут привести к таким проблемам, как люфт и ошибка движения/резонанса.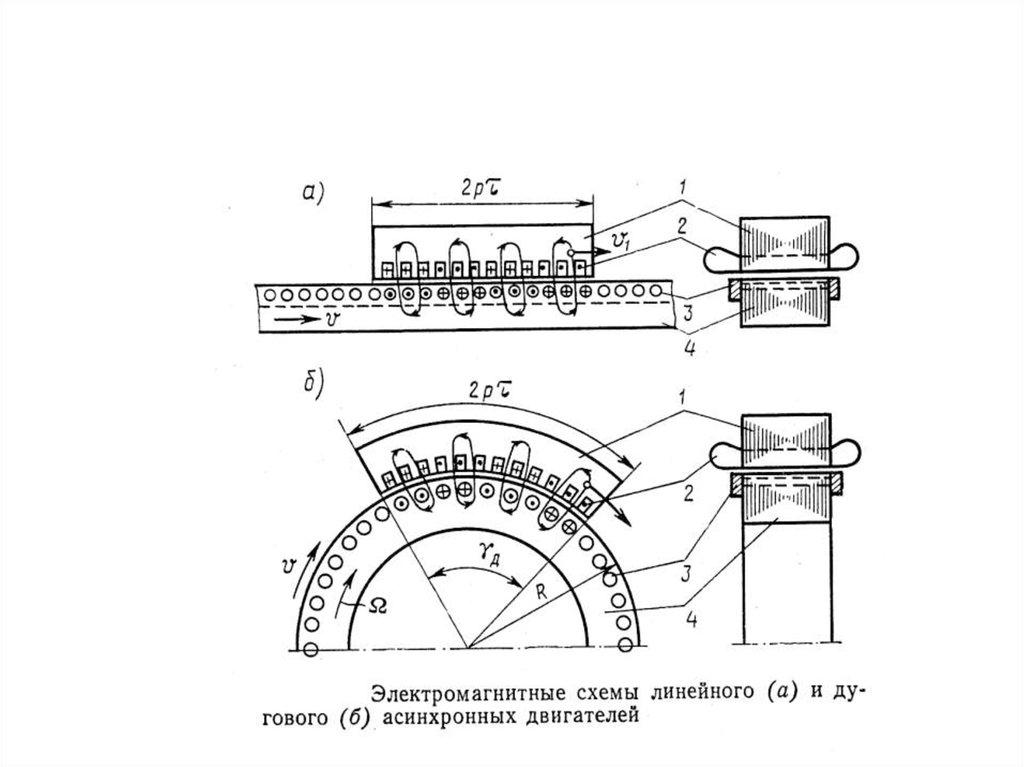 В результате пропускная способность и жесткость системы движения могут быть намного выше, обеспечивая лучшую воспроизводимость и точность.
В результате пропускная способность и жесткость системы движения могут быть намного выше, обеспечивая лучшую воспроизводимость и точность.
Другим важным преимуществом является устранение необходимости в кинематических приводных системах, таких как шарико-винтовые пары, ремни и шкивы, червячные передачи и системы реечной передачи, которые необходимы традиционным двигателям для преобразования вращательного движения в поступательное. Таким образом, линейные двигатели обеспечивают гораздо более высокую эффективность и точность позиционирования даже на высоких скоростях, одновременно обеспечивая очень плавное регулирование скорости с низкой пульсацией.
В отличие от щеточных двигателей, в прямом приводе нет контакта между движущимися частями. Благодаря отсутствию механического износа пользователи станков могут наслаждаться образцовой надежностью и сроком службы. TCO (общая стоимость владения) также снижается по сравнению с традиционными решениями.
Еще одним важным фактором является пространство.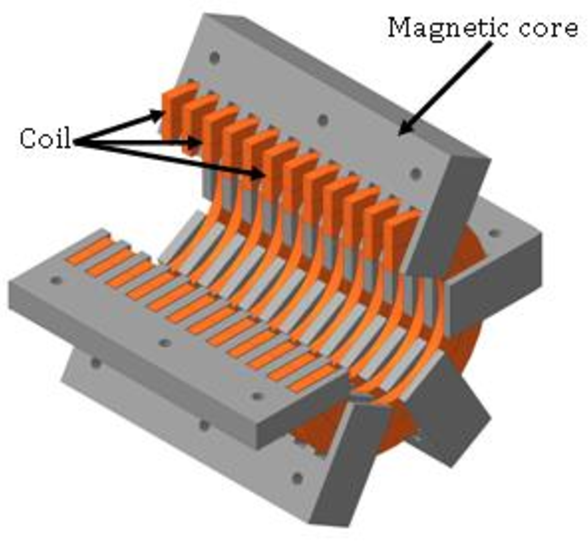 Поскольку подвижная часть линейного двигателя соединяется непосредственно с нагрузкой, это может сэкономить место и упростить конструкцию машины, что представляет собой большое преимущество как для разработчиков систем, так и для пользователей.
Поскольку подвижная часть линейного двигателя соединяется непосредственно с нагрузкой, это может сэкономить место и упростить конструкцию машины, что представляет собой большое преимущество как для разработчиков систем, так и для пользователей.
Параметры выбора
При выборе линейного двигателя для конкретного применения следует учитывать множество факторов, включая требования к динамическим характеристикам машины или системы. На первый план часто выходят такие параметры процесса, как рабочий цикл, пиковое усилие и максимальная скорость.
Доступны два основных типа линейных двигателей. Любое приложение с небольшой полезной нагрузкой, которое требует чрезвычайно точных движений или очень высокого ускорения, обычно использует преимущества линейного двигателя без железа. Однако для приложений, требующих высокой продолжительности рабочего цикла, линейные двигатели с железным сердечником создают большую непрерывную силу.
Линейные двигатели с железным сердечником
Конструкция линейных двигателей с железным сердечником предусматривает установку обмоток катушек внутри пакета стальных пластин для усиления создаваемого электромагнитного потока. Этот тип линейного двигателя обеспечивает чрезвычайно высокое постоянное усилие и хорошее рассеивание тепла для своего размера, что делает его идеальным для приложений, связанных с большими полезными нагрузками. Примеры включают станки, выполняющие фрезерные, токарные, штамповочные, формовочные и лазерные операции, а также оборудование для текстильного производства.
Этот тип линейного двигателя обеспечивает чрезвычайно высокое постоянное усилие и хорошее рассеивание тепла для своего размера, что делает его идеальным для приложений, связанных с большими полезными нагрузками. Примеры включают станки, выполняющие фрезерные, токарные, штамповочные, формовочные и лазерные операции, а также оборудование для текстильного производства.
Одним из недостатков, который многие инженеры связывают с двигателями с железным сердечником, является зубчатое зацепление, паразитная сила, возникающая из-за создания (постоянными магнитами) флуктуирующей силы притяжения к магнитным материалам, таким как железо. Короче говоря, железный сердечник имеет «предпочтительные» положения по отношению к магнитам, поэтому двигатель должен изменять силу тяги, чтобы преодолевать эти положения, что приводит к неплавному «зубчатому» движению.
Однако современные решения с оптимизированной конструкцией железного сердечника ограничивают эту историческую проблему, обеспечивая низкую производительность. Например, некоторые линейные двигатели имеют магниты, которые не ортогональны направлению движения, а вместо этого установлены с небольшим углом наклона, что помогает сгладить движение в достаточной степени для решения большого количества обычных промышленных применений.
Например, некоторые линейные двигатели имеют магниты, которые не ортогональны направлению движения, а вместо этого установлены с небольшим углом наклона, что помогает сгладить движение в достаточной степени для решения большого количества обычных промышленных применений.
Линейные двигатели без сердечника
В линейных двигателях без сердечника нет силы притяжения или зубчатого зацепления между катушкой и магнитной дорожкой. В результате безжелезные варианты обеспечивают отсутствие силы пульсации, высокую точность, постоянную линейную силу, а также высокую скорость и ускорение. Кроме того, в 95% случаев безжелезные линейные двигатели работают за счет перемещения более легкой катушки, что помогает достичь более динамичного движения и постоянной скорости. Чрезвычайно тонкая форма вариантов без железа также выгодна, поскольку она предоставляет машиностроителям гибкие варианты монтажа.
Потенциальные области применения этого типа линейных двигателей широки и разнообразны; по сути, любая машина или система, перемещающая небольшую массу с высокой скоростью и высокой точностью.