Содержание
Линейный привод своими руками
Главная » Разное » Линейный привод своими руками
Самодельный электрический актуатор. Как сделать линейный актуатор (линейный привод) самому. | ДелайСам.Ру
Иногда в хозяйстве требуется сделать линейный привод. Т.е. что то не вращать и поворачивать, а перемещать линейно, причем порой на значительные расстояния. Обычно это делается при помощи линейного актуатора. Актуатор преобразует вращательное движение двигателя в линейное перемещение. Потребовалось подобное устройство и мне и я решил его сделать самостоятельно.
Обычно линейное перемещение осуществляют при помощи зубчатой рейки (это что то вроде шестерни, только развернутой в прямую линию). Иногда — при помощи т.н. ходового винта (его можно видеть в винтовых домкратах). Во втором случае наблюдается эффект большой редукции, поскольку на один оборот двигателя приходится всего один оборот винта, а перемещение равно шагу резьбы. Актуаторы с зубчатой рейкой быстрые, но не точные и слабые (усилие перемещения там равно усилию на ведущей шестерне двигателя). А актуаторы с ходовым винтом – это по сути домкраты с электроприводом. Точность их перемещения очень высокая (доли мм), усилие большое, а двигатель для привода требуется маломощный. Единственный их недостаток — они медленные (по сравнению с реечными). Зато их можно очень легко сделать самому в домашних условиях без какого либо особенного инструмента. Еще один их большой плюс — у них явно выраженный эффект самоторможения. Т.е. заставить актуатор перемещаться каким либо способом помимо вращения ходового винта невозможно. Это позволяет использовать винтовые актуаторы в электрических замках и запорах. Их невозможно открыть внешним воздействием (кроме разрушающего).
А актуаторы с ходовым винтом – это по сути домкраты с электроприводом. Точность их перемещения очень высокая (доли мм), усилие большое, а двигатель для привода требуется маломощный. Единственный их недостаток — они медленные (по сравнению с реечными). Зато их можно очень легко сделать самому в домашних условиях без какого либо особенного инструмента. Еще один их большой плюс — у них явно выраженный эффект самоторможения. Т.е. заставить актуатор перемещаться каким либо способом помимо вращения ходового винта невозможно. Это позволяет использовать винтовые актуаторы в электрических замках и запорах. Их невозможно открыть внешним воздействием (кроме разрушающего).
В продаже имеются резьбовые шпильки различного диаметра. Их и будем использовать в качестве ходового винта. Если требуется значительные усилия (например вы делаете актуатор для автоматического открывания ворот), то лучше взять шпильку с резьбой М16-М20. Она выдержит усилие в сотни килограмм. Для меньших нагрузок можно взять шпильки потоньше.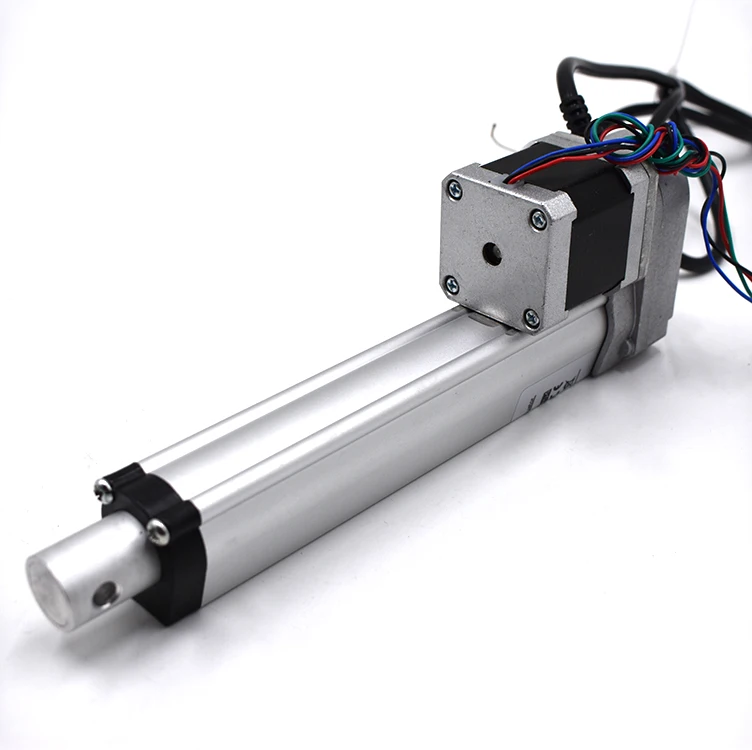
Разумеется потребуется и ответная часть для ходового винта – гайка. Лучше их взять несколько, что бы усилие передавалось на большую поверхность. Дело в том, что настоящие ходовые винты имеют трапециевидную и глубокую резьбу, закаленную поверхность. Резьбовая же шпилька сделана из мягкого металла, резьба у нее неглубокая и треугольной формы. Это же вызывает повышенное трение при вращении, поэтому ходовой винт из обычной резьбовой шпильки требует обильной и тщательной смазки и защиты от грязи.
Итак, приступаем к сборке линейного электрического актуатора. Необходимой деталью актуатора является и толкатель. Т.е. то, что собственно будет перемещаться. Лучше всего для этой роли подходит трубка, квадратная в сечении. Необходимо подобрать трубку такого размера, что бы гайки могли в нее войти. Например, для гаек резьбы М10 подойдет трубка 20 х 20 мм. У гаек необходимо сточить пару ребер, что они входили в трубку (на фото то, что надо сточить обозначено красным цветом). Делается это так. На шпильку накручиваем несколько гаек вплотную друг к другу, но без затягивания. Все гайки зажимаем в тисках и стачиваем ребра всех гаек. Затем перевернув все на 180 градусов, стачиваем противоположные ребра. В итоге, все гайки должны входить в трубку, но не должны в ней прокручиваться.
На шпильку накручиваем несколько гаек вплотную друг к другу, но без затягивания. Все гайки зажимаем в тисках и стачиваем ребра всех гаек. Затем перевернув все на 180 градусов, стачиваем противоположные ребра. В итоге, все гайки должны входить в трубку, но не должны в ней прокручиваться.
Теперь надо зафиксировать гайки внутри трубы, у самого ее конца. Проще всего это сделать с помощью эпоксидной смолы, она прекрасно склеивает металлы. Тщательно обезжириваем внутреннюю поверхность трубы и гайки. На шпильку наносим тонкий слой густой смазки (литол, солидол). Опять собираем гайки в «блок» на шпильке. Смазка должна заполнить зазоры между гайками, что бы туда не протекла эпоксидная смола. Смазкой надо замазать и торцы блока гаек. Вобщем надо максимально защитить резьбу от попадания на нее смолы. (Если вы знакомы со слесарным делом, возможно вам будет проще взять квадратный пруток, отрезать от него несколько сантиметров, просверлить вдоль и нарезать в нем резьбу под шпильку. Но я описываю процесс изготовления «из того что есть»).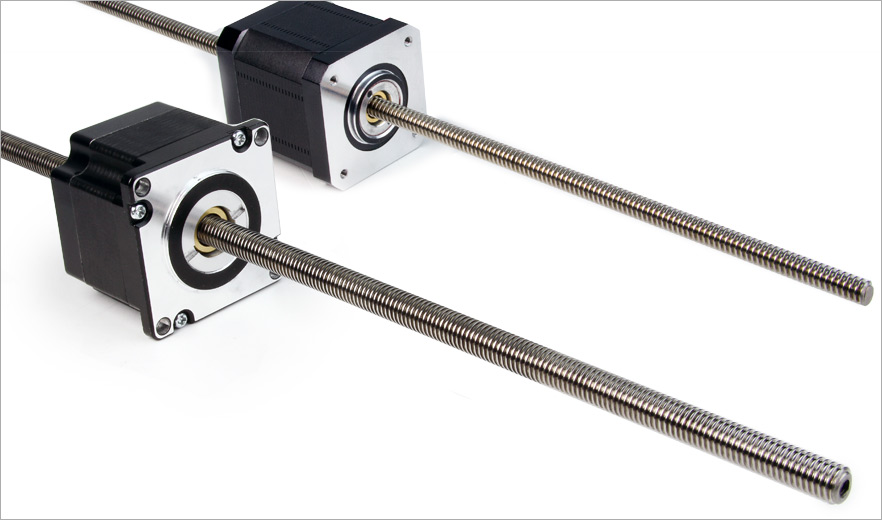
Приготовив эпоксидную смолу, аккуратно вклеиваем гайки внутрь квадратной трубы и даем смоле застыть. А пока займемся муфтой сцепления. Ведь шпильку должен вращать электродвигатель. Поскольку и шпилька и вал двигателя обычно круглые, проще всего сделать муфту из отрезков двух трубок, смежных по диаметру. Если диаметры сильно рознятся, можно использовать несколько трубок, набирая нужный диаметр.
Соединив муфту просверливаем сквозное отверстие под контровочный винт. Фиксируем одну часть сцепления на валу двигателя, вторую – ни конце резьбовой шпильки.
В качестве привода актуатора следует выбрать электродвигатель с редуктором, червячным или планетарным. Таких двигателей имеется огромное количество. Это моторчики привода стеклоочистителей автомобилей, электрических стеклоподъемников, всевозможные электрические отвертки (включая самые дешевые), шуруповерты и т.д. и т.д. Не считая специальных моторов-редукторов.
Вобщем привод — совершенно не дефицит. Главное, что бы на валу были не слишком высокие обороты (50-200 в минуту) и достаточное усилие для проворачивания резьбовой шпильки.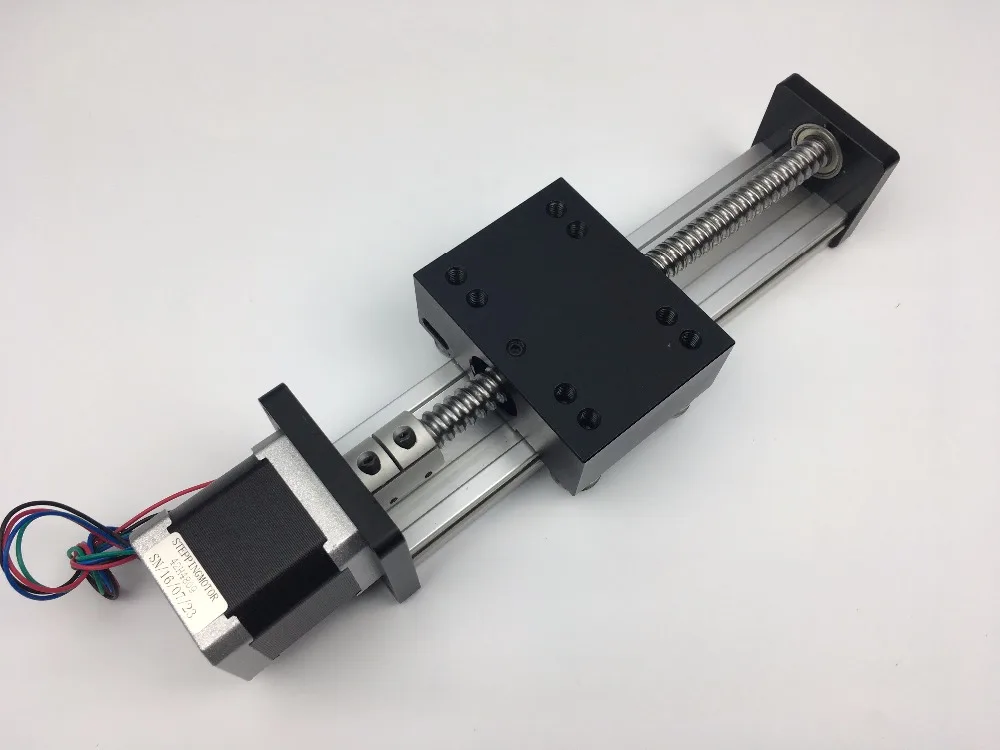 В крайнем случае купите самую дешевую электрическую отвертку за 300-400 руб, она прекрасно будет работать. Разумеется, мощность двигателя должна соответствовать и задачам, возложенным на актуатор. Ворота отверткой трудно открывать… Я в данном примере использовал какой то моторчик неизвестного назначения. Но у него был червячный редуктор и полностью отсутствовал вал. Пришлось в отверстие шестерни вкрутить отрезок резьбовой шпильки и зафиксировать его самоконтрящимися гайками.
В крайнем случае купите самую дешевую электрическую отвертку за 300-400 руб, она прекрасно будет работать. Разумеется, мощность двигателя должна соответствовать и задачам, возложенным на актуатор. Ворота отверткой трудно открывать… Я в данном примере использовал какой то моторчик неизвестного назначения. Но у него был червячный редуктор и полностью отсутствовал вал. Пришлось в отверстие шестерни вкрутить отрезок резьбовой шпильки и зафиксировать его самоконтрящимися гайками.
Нам осталось изготовить для актуатора суппорт. Его размер определяется и назначением актуатора и размерами. В простейшем случае это может быть просто отрезок доски. Ее длина должна быть равной длине шпильки плюс место для двигателя.
Двигатель я закрепил с помощью монтажного уголка, саморезами. На противоположном конце суппорта установил направляющую муфту. Тоже из квадратной трубы, только смежного размера. Она же не дает подвижной трубе — толкателю проворачиваться вместе с вращающейся шпилькой. Эту муфту надо установить так, что бы труба – толкатель была параллельно плоскости суппорта. Хотя это не обязательно.
Хотя это не обязательно.
Вот практически и готов актуатор. Надо только соединить муфту сцепления. Если включить двигатель, то его вал начнет вращаться, и резьбовая шпилька тоже. Она будет или ввинчиваться или вывинчиваться из гаек, расположенных в трубе толкателе. Труба у нас не проворачивается из-за направляющей муфты. Поэтому труба толкатель или выдвигается за пределы суппорта, или втягивается назад, приближаясь к двигателю. Шпилька при этом уходит внутрь трубы – толкателя.
В моем случае я использовал метровые шпильку и трубу-толкатель. Из-за необходимости иметь запас по краям рабочего хода в несколько сантиметров, толкатель перемещается примерно на 850 миллиметров. Что меня более чем устроило (актуатор планировался для открывания фрамуги в теплице для ее проветривания). Тяговое усилие составило около 40 кг (больше просто нечем было мерить). Число оборотов двигателя было около 50/мин. Шаг резьбы 1,5 мм. Т.е. за минуту актуатор перемещался всего на 75 мм. Но проветривание теплицы — процесс не спешный.
Актуатор изначально не имеет «тормозов». Т.е. если не выключать двигатель вовремя, то труба – толкатель или «свинтится» со шпильки совсем (и актуатор саморазберется). Или наоборот, упрется в сцепление, заклинит и тогда может сгореть двигатель. Поэтому если планируется работа актуатора от одного края до другого, для предотвращения подобных ситуаций надо сделать концевые выключатели.
В общем случае это могут быть механические выключатели. Для этого к трубе-толкатели крепят прочный «язычок», выступающий вбок. А на суппорте устанавливают пару концевых выключателей, которые разрывают электрическую цепь питания моторчика. Когда язычок нажмет на кнопку концевого выключателя в каком либо крайнем положении, мотор выключится.
Если планируется управление актуатором в автоматическом режиме, под управлением какого то контроллера, то логичнее его будет оснастить герконами, а на самом толкателе закрепить небольшой магнит. На фото – я использовал параллельно включенные несколько герконов (для надежности). Герконы позволят надежно сработать «тормозам» и не боятся ни влаги ни грязи. Герконы подают сигнал в контроллер о том, что актуатор в крайнем положении и надо выключить двигатель. Использование герконов хорошо еще в том плане, что с их помощью (если потребуется) можно знать и о промежуточных положениях актуатора, что он прошел (или проходит) какую то точку.
Герконы позволят надежно сработать «тормозам» и не боятся ни влаги ни грязи. Герконы подают сигнал в контроллер о том, что актуатор в крайнем положении и надо выключить двигатель. Использование герконов хорошо еще в том плане, что с их помощью (если потребуется) можно знать и о промежуточных положениях актуатора, что он прошел (или проходит) какую то точку.
Непрерывная и очень напряженная эксплуатация данного актуатора в теплице (высокая влажность и большие колебания температуры) показали абсолютную надежность конструкции. Никаких сбоев и замечаний выявлено не было. За лето пару раз наносил на шпильку по «чайной ложке» литола. Вот и все обслуживание. Управлялся как в ручном, так и в автоматическом режиме от температурного контроллера и просто от таймера. «Неспешность» и абсолютная прогнозируемость поведения актуатора позволяет точно рассчитывать время, в каком положении он окажется через некоторое время работы.
Себестоимость такого актуатора составила около 600 руб ($20) , включая покупку электромотора. Простота конструкции позволяет использовать ее как прототип для изготовления актуаторов всевозможного назначения и размеров.
Простота конструкции позволяет использовать ее как прототип для изготовления актуаторов всевозможного назначения и размеров.
Константин Тимошенко © 01.12.2011 г.
Электрический линейный привод: как сделать актуатор своими руками
Линейные приводы используются во всех современных крутых девайсах: 3Д-принтеры, лазерные резчики, ЧПУ. Одним из основных факторов, влияющих на стоимость линейных актуаторов, является линейная направляющая, которая состоит из компонентов, которые поддерживают прямой ход управляемой части устройства (например, набор точных стержней и линейных подшипников).
Цены на компоненты направляющих могут варьироваться от десятков до тысяч долларов в зависимости от их размера и точности. Один из способов обойти высокую стоимость этих компонентов — заменить их механизмом, который преобразует вращательное движение в прямолинейное. Механизм Саррюса, изобретенный в 1853 году Пьером Фредериком Саррюсом, как раз является одним из таких механизмов, которые могут обеспечить идеально ровное линейное движение, и для которых не нужны какие-либо справочные руководства.
В этом проекте для создания недорогого механизма Саррюса используются простые пластины, напечатанные на 3Д принтере или вырезанные лазером, а также пластиковые «живые» петли. Затем, чтобы заставить их двигаться, к ним добавляется шаговый двигатель NEMA 17 и резьбовой стержень. Длина хода привода в этом проекте составляет приблизительно 254 мм, но бОльшая или меньшая версия может быть выполнена путем простого изменения длины соединительных пластин.
Шаг 1: Материалы и приспособления
Материалы:
- Связующая пластина (4 штуки, напечатанные на 3Д-принтере или вырезанные лазером в Шаге 2)
- Пластина двигателя (1 штука, напечатанная на 3Д-принтере или вырезанная лазером в Шаге 2)
- Пластина привода (1 штука, напечатанная на 3Д-принтере или вырезанная лазером в Шаге 2)
- Пластиковые петли (6 штук, куплены мной в McMaster-Carr, парт-номер 1637A713)
- Винты с плоской головкой, резьба 6-32 x 9,5 мм длиной (24 штуки)
- Пресс-гайка, резьба 6-32 (1 упаковка из 25 штук, куплены мной в McMaster-Carr, парт-номер 94674A515)
- Винты с выемкой под шестигранник в головке, M3x0.
 5 x 12 мм длиной (2 штуки)
5 x 12 мм длиной (2 штуки) - Шестигранные гайки, M3x0.5 (2 штуки)
- Винты с выемкой под шестигранник в головке, M3x0.5 x 10 мм длиной (4 штуки)
- Муфта вала, 5 х 8 мм (1 штука)
- Шаговый мотор NEMA 17 с монтажными отверстиями с резьбой M3x0.5 (1 штука)
- Гайка Акме M8 (1 штука)
- Стержень с резьбой Акме M8, 300 мм длиной (1 штука)
 5 x 12 мм длиной (2 штуки)
5 x 12 мм длиной (2 штуки)Инструмент:
- Набор шестигранных ключей
- Отвертка
- Плоскогубцы
Используя прикреплённые файлы, напечатайте на 3Д-принтере, либо вырежьте на лазерном резчике следующие части:
- Связующая пластина (4 штуки)
- Пластина двигателя (1 штука)
- Пластина привода (1 штука)
Свои части я напечатал серым пластиком ABS. Если вы вырежете части лазером, то толщина их должна составить около 6.35 мм. В качестве материала подойдёт дерево, акрил, МДФ или любой другой схожий материал.
Я прикрепляю файлы формата STEP для тех из вас, кто хочет внести в проект свои изменения. Если вы планируете использовать этот электрический привод в реальной машине, вам, вероятно, потребуется добавить свои монтажные отверстия и/или увеличить/уменьшить длину соединительных пластин в соответствии с вашими нуждами.
Если вы планируете использовать этот электрический привод в реальной машине, вам, вероятно, потребуется добавить свои монтажные отверстия и/или увеличить/уменьшить длину соединительных пластин в соответствии с вашими нуждами.
Файлы
Шаг 3: Вставляем пресс-шайбы
Вставьте шайбы в связующие, пластину двигателя и привода. Обратите внимание на ориентацию пластин двигателя и привода.
Шаг 4: Установите на связующие пластины петли
Установите петли согласно фотографиям и прочно закрепите их четырьмя винтами с плоской головкой. Не сорвите резьбу слишком большим давлением.
Повторите процедуру и соедините петлёй две оставшиеся связующие пластины. У вас должно получиться два набора соединённых пластин.
Шаг 5: Установите петли на двигатель
Расположите пластину двигателя и два набора связующих как показано на фото. Установите две петли при помощи восьми винтов с плоской головкой.
Шаг 6: Установите петли привода
Расположите пластину привода и связующие пластины как показано на фото.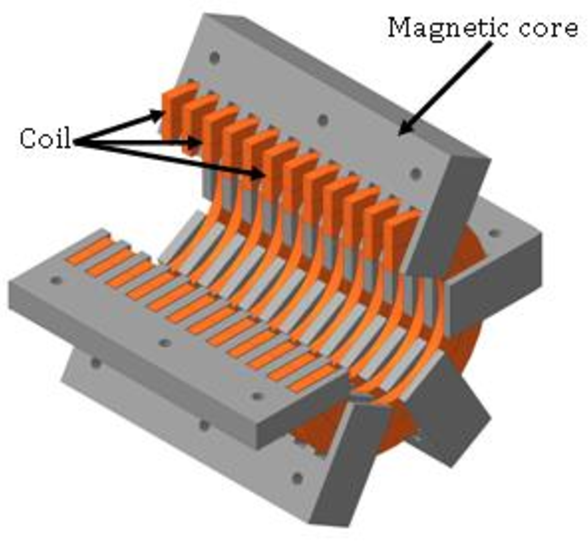 Установите две пластиковые петли при помощи восьми винтов с плоской головкой.
Установите две пластиковые петли при помощи восьми винтов с плоской головкой.
Шаг 7: Устанавливаем гайку Акме
Вставьте два винта с выемкой под шестигранник M3 x 12 мм сквозь связующее привода, как показано на картинке. Опустите на них гайку Акме. Закрутите две шестигранных гайки M3 поверх винтов. Переверните пластину привода. Затяните винты, удерживая гайки плоскогубцами и поворачивая винты подходящим шестигранным ключом.
Шаг 8: Прикрепите шаговый двигатель
На связующее двигателя при помощи четырёх винтов с выемкой под шестигранник M3 x 10 прикрепите шаговый двигатель.
Шаг 9: Прикрепляем муфту вала
Оденьте на вал двигателя 5-миллиметровую муфту вала, затяните винты шестигранным ключом.
Шаг 10: Установите стержень с резьбой Акме
Вкрутите стержень в гайку Акме примерно наполовину. Согните механизм Саррюса таким образом, чтобы вы смогли продеть стержень с резьбой в муфту вала. Затяните винты на муфте вала подходящим шестигранным ключом.
Шаг 11: Запустите механизм
Сборка линейного электропривода своими руками подошла к концу! Теперь осталось лишь подключить шаговый двигатель к контроллеру, и механизм придёт в движение.
Актуатор. Как сделать простой самодельный линейный актуатор. Двигатель для линейного перемещения. | ДелайСам.Ру
При изготовлении различных устройств для дома или дачи, иногда возникает проблема в автоматическом линейном перемещении какого либо предмета или детали. Например — автоматическое открывание дверей или ворот, Автоматическое запирание — отпирание дверей, изменение положения зеркала концентрирующего солнечного коллектора. Или изменение положения антенны спутникового телевидения. (В этом случае не придется ставить несколько антенн на каждый спутник, а просто поворачивать одну антенну на выбранный спутник). Вобщем, стоит задача получить линейное перемещение деталей.
Эту задачу решают с помощью актуаторов. Что такое – Актуатор? Да вобщем то устройство предназначенное для реализации линейного перемещения, обычно путем преобразования вращательного движения в поступательное. Электродвигатели — чрезвычайно дешевы и распространены. Но они могут только вращать свой вал. Реверсивные — в обе стороны в зависимости от подключения. Им легко управлять. А актуаторы — способны преобразовать вращательное движение вала электродвигателя в возвратно поступательное. Кроме этого, актуаторы, как правило значительно увеличивают силу тяги, поскольку являются своего рода понижающими редукторами.
Электродвигатели — чрезвычайно дешевы и распространены. Но они могут только вращать свой вал. Реверсивные — в обе стороны в зависимости от подключения. Им легко управлять. А актуаторы — способны преобразовать вращательное движение вала электродвигателя в возвратно поступательное. Кроме этого, актуаторы, как правило значительно увеличивают силу тяги, поскольку являются своего рода понижающими редукторами.
Простейший актуатор — это автомобильный винтовой домкрат. Вращая его винт, мы вызываем линейное перемещение опорной площадки домкрата. По такому принципу делается подавляющее большинство линейных актуаторов. В этой статье рассматриваются несколько конструкций самодельных актуаторов.
Актуатор 1:
Конструкция актуатора понятна из эскиза. На вал реверсивного электродвигателя (через переходник) крепится резьбовая шпилька. Длина этой шпильки будет определять и рабочий ход актуатора. Если шпилька длинная, то противоположные ее конец закрепляется в опорной муфте, желательно с подшипником.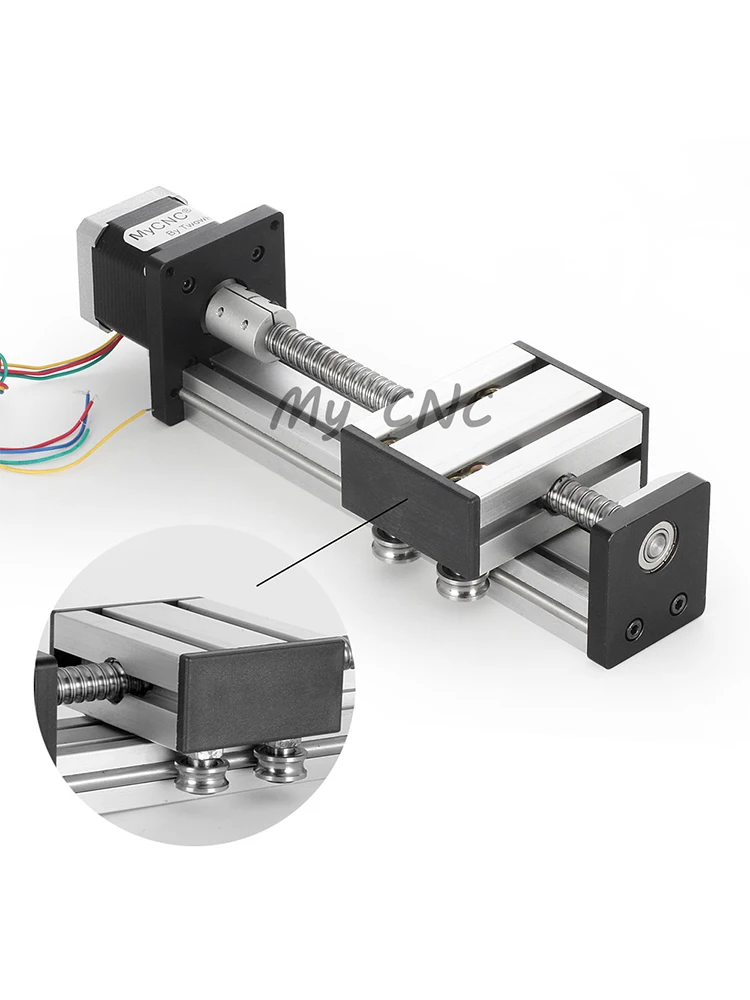
На резьбовую шпильку, которая служит продолжением вала электродвигателя, навинчена гайка. К гайке приварен (приклеен, припаян) держатель толкателя, который в свою очередь так же пропущен через опорные муфты. Этот же толкатель не дает гайке проворачиваться при вращении вала – шпильки. Соответственно, если двигатель будет работать, то гайка будет перемещаться по резьбе вдоль всего вала – шпильки. Направление перемещения задается направлением вращения вала. Одновременно с ней будет перемещаться и толкатель актуатора.
Актуатор 2:
В качестве толкателя можно использовать и трубку, разместив гайку непосредственно в ней. В этом случае, вал – резьбовая шпилька помещается внутри трубы. Гайка вваривается, вклеивается или впаивается в торец трубы. После чего труба навинчивается на вал – шпильку. Если вал достаточно длинный, но на его конец надевают центрирующую шайбу. Торец трубы глушат каким либо наконечником для крепления к другим деталям. Кроме того, этот же наконечник выполняет важную функцию, предотвращая проворот трубки при вращении вала.
Если вал начнет вращаться, то гайка, лишенная возможности поворачиваться , начнет перемещаться вдоль шпильки – вала, увлекая за собой и трубку – толкатель.
Обе конструкции достаточно просты, но имеют существенный недостаток. Для большого линейного перемещения им требуются не менее длинные валы. Сами резьбовые шпильки весьма не дороги и доступны, однако все это увеличивает размеры актуатора. Поэтому есть смысл рассмотреть еще один вариант.
Актуатор 3:
В этом варианте используется пара шестеренок (можно использовать и червячную или клиноременную передачу, или фрикционную передачу). Ведущая шестерня закреплена на валу электродвигателя, а ведомая — на полой (трубчатой) оси, зажатой в опорах с шарикоподшипниками. Внутри полой оси располагается гайка, в которую вкручивается и резьбовая шпилька. Она же выполняет и роль толкателя.
При вращении двигателя шестерни тоже начинают вращаться, и поскольку гайка не имеет возможности перемещаться линейно, то перемещается шпилька – толкатель, ввинченная в нее. Разумеется при отсутствии проворота.
Разумеется при отсутствии проворота.
Такая конструкция актуатора проще, может иметь очень длинный толкатель и даже в виде гибкого вала или тяги. Но она требует пару шестерней и довольно замысловатого закрепления одной из них.
Приведенные варианты самодельных актуаторов – не единственные. Если вам удасться добыть зубчатую рейку, то реализовать актуатор можно довольно просто, сделав линейную червячную передачу. Например – так реализованы актуаторы, которые закрывают замки в автомобильных дверях. Усилья там не большие и все шестерни – пластиковые. Однако по настоящему длинные металлические зубчатые рейки — довольно редки и дороги. Поэтому проще всего сделать самодельный актуатор именно на основе гайки и резьбовой шпильки.
Константин Тимошенко (с) 10.01.2009
Вопросы на форуме…
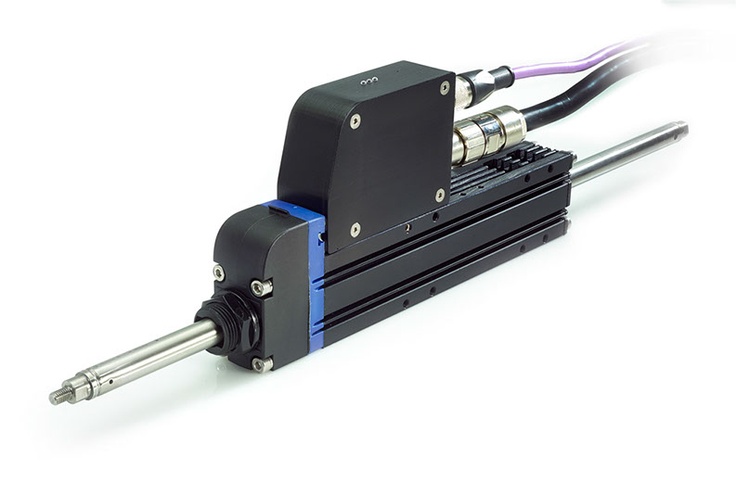
цилиндрический линейный двигатель / Хабр
Источник картинки
Мы привыкли к тому, что в различных механических устройствах, требующих для своей работы электродвигатель, преобразование вращательного движения в необходимое рабочее — происходит с использованием множества промежуточных частей, что усложняет конструкцию, и уменьшает надёжность. Однако существует альтернатива и именно об этом мы и поговорим в этой статье.
Однако существует альтернатива и именно об этом мы и поговорим в этой статье.
Научно-технический прогресс, охватывающий одну сферу человеческой жизни за другой, постепенно видоизменял и способ передачи движения от электродвигателя. Если на станках начала прошлого века электродвигатель был один на всех и движение от него передавалась по валу через весь цех, с которого отдельные станки забирали необходимый вращательный момент с помощью ремённой передачи, —
то с ускорением прогресса, двигатель сначала переместился как можно ближе к конкретному станку, а потом и вовсе перешёл на каждый станок.
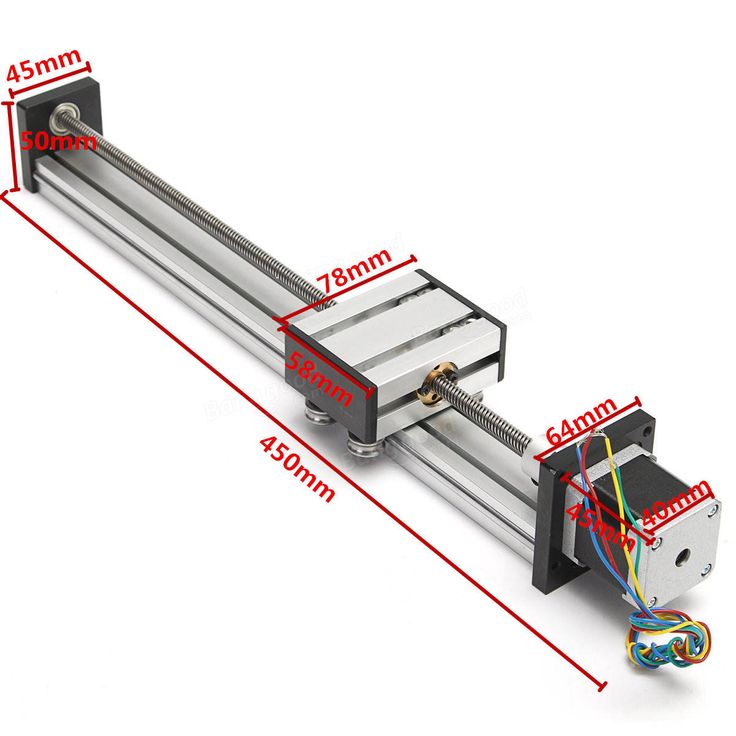
Претерпевали изменения и передаточные звенья от двигателя к станку. Например, широко распространились шарико-винтовые пары.
Источник: 3d-diy.ru
Причём шарико-винтовые пары только относительно недавно стали широкодоступными, их технология производства была достаточно отработана, а стоимость стала доступной для широкого круга потребителей.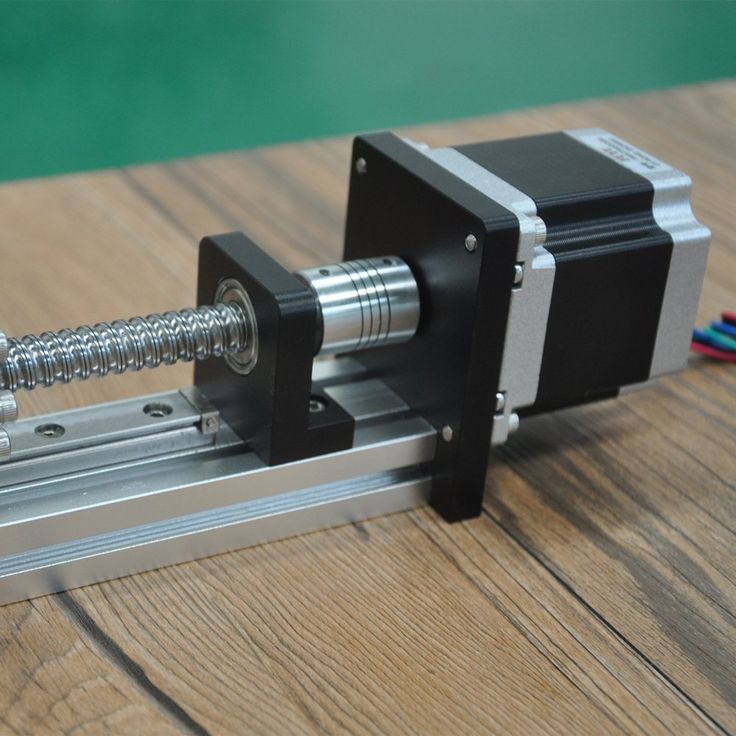 В свою очередь, разнообразные зубчатые передачи всегда были относительно доступными и широко применялись в различных схемах передачи движения. У зубчатых передач всегда была одна отрицательная сторона — довольно большой шум в работе и физический износ при трении зубьев друг о друга. Конечно, это можно несколько нивелировать тщательной смазкой, однако она притягивает к себе пыль, соринки, загрязняет рабочий редуктор (особенно если этот редуктор установлен на металлообрабатывающем станке).
В свою очередь, разнообразные зубчатые передачи всегда были относительно доступными и широко применялись в различных схемах передачи движения. У зубчатых передач всегда была одна отрицательная сторона — довольно большой шум в работе и физический износ при трении зубьев друг о друга. Конечно, это можно несколько нивелировать тщательной смазкой, однако она притягивает к себе пыль, соринки, загрязняет рабочий редуктор (особенно если этот редуктор установлен на металлообрабатывающем станке).
Поэтому инженерная мысль искала какие-то другие решения, которые бы позволили избавиться от промежуточных звеньев. И такое решение было найдено — линейный электродвигатель!
Линейный двигатель — это электродвигатель, у которого статор и ротор «развёрнуты», таким образом, что вместо создания крутящего момента (вращения) — он создаёт линейную силу по всей своей длине.
Автор: Schnibbi678 — Own work, CC BY-SA 3.0, Источник
Однако линейные двигатели не обязательно прямые:
Автор: Lutex (talk) — собственная работа, CC BY-SA 3.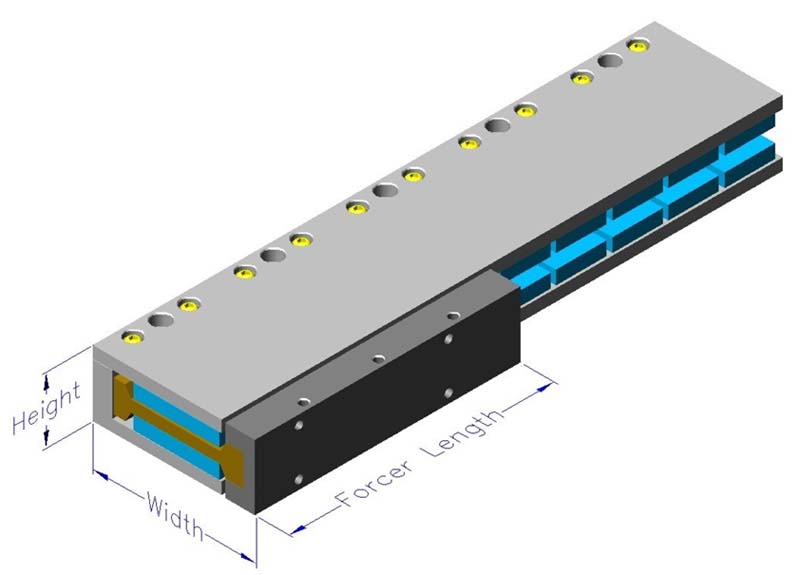 0, Источник
0, Источник
Характерно, что активная часть линейного двигателя имеет концы, в то время как более традиционные двигатели устроены в виде непрерывного контура.
Было предложено множество конструкций линейных двигателей, которые можно разделить на две основные категории:
- линейные двигатели с малым ускорением;
- линейные двигатели с высоким ускорением.
Линейные двигатели с низким ускорением подходят для поездов на магнитной подвеске и других наземных транспортных средств. Двигатели с низким ускорением, высокой скоростью и большой мощностью обычно представляют собой линейные синхронные двигатели. (LSM) с активной обмоткой на одной стороне воздушного зазора и массивом магнитов с чередующимися полюсами на другой стороне.
Линейные двигатели с высоким ускорением обычно довольно короткие и предназначены для ускорения объекта до очень высокой скорости, например, рельсотрон:
Линейные двигатели с высоким ускорением предлагались для ряда применений. Их рассматривали для использования в качестве оружия, поскольку современные бронебойные боеприпасы, как правило, состоят из небольших снарядов с очень высокой кинетической энергией, для которых подходят именно такие двигатели. Многие американские горки, запущенные в парках развлечений, теперь используют линейные асинхронные двигатели для движения поезда на высокой скорости.
Их рассматривали для использования в качестве оружия, поскольку современные бронебойные боеприпасы, как правило, состоят из небольших снарядов с очень высокой кинетической энергией, для которых подходят именно такие двигатели. Многие американские горки, запущенные в парках развлечений, теперь используют линейные асинхронные двигатели для движения поезда на высокой скорости.
Обычно они имеют конструкцию линейного асинхронного двигателя переменного тока (LIM) с активной трёхфазной обмоткой на одной стороне воздушного зазора и пластиной пассивного проводника на другой стороне. Тем не менее рельсотрон постоянного тока с униполярным линейным двигателем является ещё одной конструкцией линейного двигателя с высоким ускорением.
Высокоскоростные линейные двигатели сложно проектировать по ряду причин. Они требуют большого количества энергии в очень короткие промежутки времени. Одна конструкция ракетной установки требует 300 ГДж для каждого запуска в период менее секунды.
Обычные электрические генераторы не предназначены для такой нагрузки, но можно использовать методы краткосрочного накопления электроэнергии.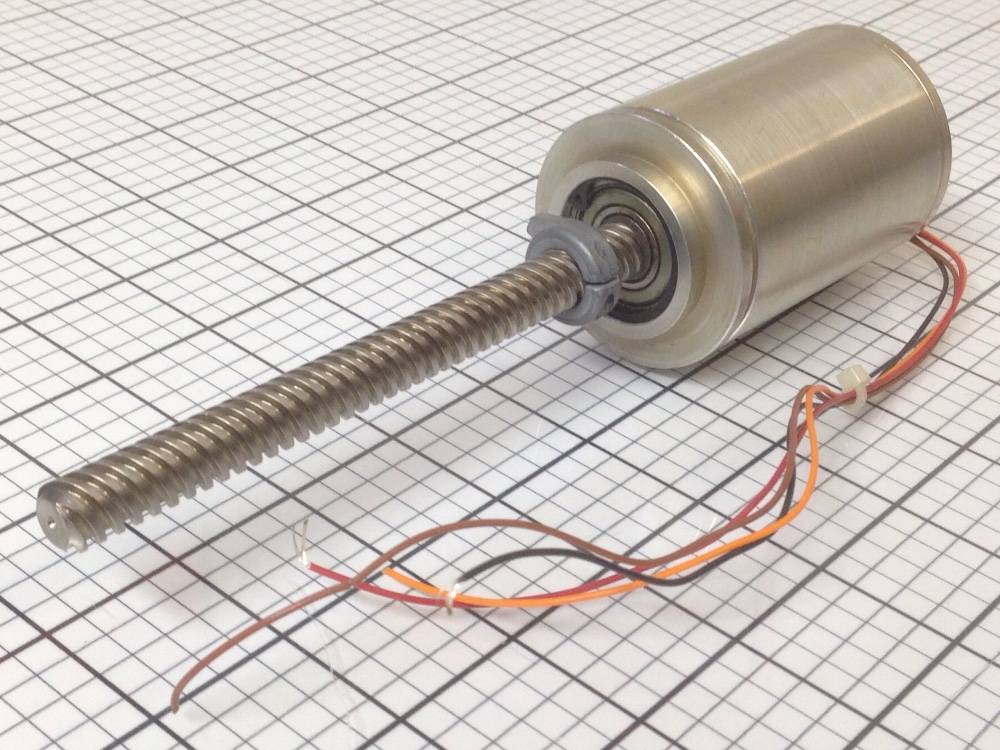 Конденсаторы громоздки и дороги, но могут быстро поставить большое количество энергии. Униполярные генераторы можно использовать очень быстрого преобразования кинетической энергии маховика в электрическую энергию.
Конденсаторы громоздки и дороги, но могут быстро поставить большое количество энергии. Униполярные генераторы можно использовать очень быстрого преобразования кинетической энергии маховика в электрическую энергию.
Линейные двигатели с высоким ускорением также требуют очень сильных магнитных полей и магнитные поля часто слишком сильны, чтобы можно было использовать сверхпроводники. Однако при тщательном проектировании это не должно быть серьёзной проблемой.
В данный момент применение линейных электродвигателей ещё не до конца отработано и поэтому их технологии изготовления, и стоимость оставляет желать лучшего. Однако, использование линейного двигателя позволяет реализовать такие заманчивые опции, как движение с высочайшей скоростью ( до 1,8 м/с и более!), практически без механического износа:
Однако не все двигатели так хороши, например, плоские линейные двигатели (схема которого приведена несколько выше).
Кроме сложности изготовления, они отличаются повышенным нагревом, причиной чего являются вихревые токи Фуко, что ещё усугубляется ограниченными возможностями по охлаждению двигателя, потому что, как правило, на них сверху смонтирован рабочий стол обрабатывающего станка. Так как многие промышленные станки, особенно металлообрабатывающие, имеют повышенные требования к жёсткости и точности конструкции (для обеспечения требуемой точности обработки), — такие двигатели вносят искажения в работу из-за температурного расширения конструкции благодаря нагреву в процессе, причём нагрев может достигать даже 100 градусов Цельсия!
Так как многие промышленные станки, особенно металлообрабатывающие, имеют повышенные требования к жёсткости и точности конструкции (для обеспечения требуемой точности обработки), — такие двигатели вносят искажения в работу из-за температурного расширения конструкции благодаря нагреву в процессе, причём нагрев может достигать даже 100 градусов Цельсия!
Альтернативой плоскими линейным двигателям являются цилиндрические линейные двигатели. Они устроены следующим образом: цилиндрическая обмотка расположена вокруг сердечника, образованного из магнитов. То есть, катушка может перемещаться по этому сердечнику.
В отличие от плоского двигателя линейный двигатель достаточно эффективно охлаждается и поэтому не требует сложных и проблемных конструкций для охлаждения, а так как у него отсутствует сердечник, — отсутствует и потенциальный источник тепла под воздействием вихревых токов.
Благодаря отсутствию сердечника в конструкции цилиндрического двигателя,— он может работать очень плавно, без скачков скорости:
Другими словами, на основе линейных электрических двигателей возможно построение ультрапрецизионного оборудования.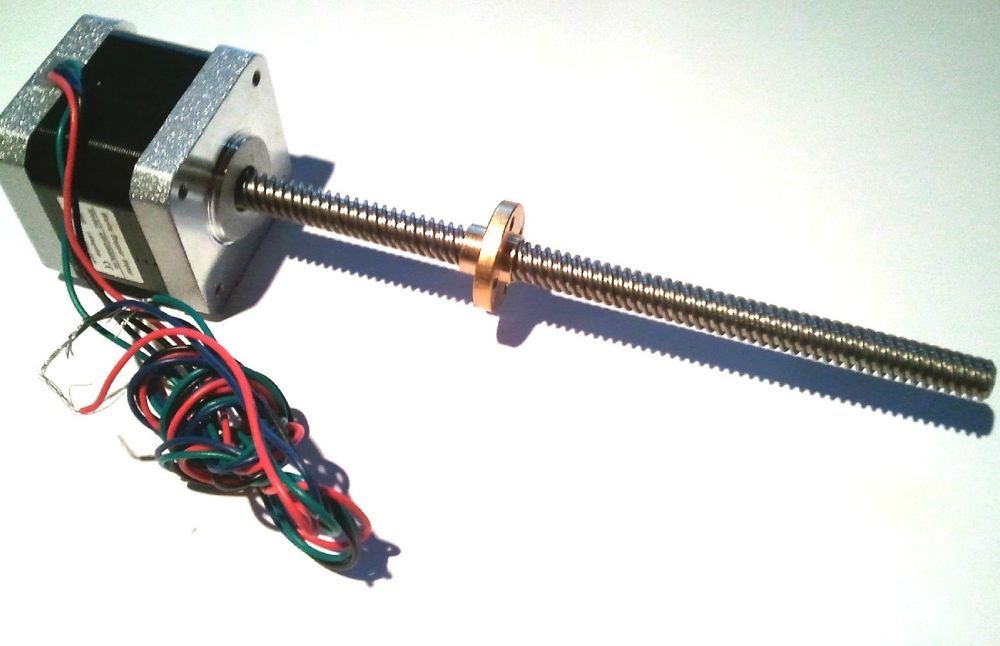
Кроме того, из-за симметричной конструкции происходит более эффективное использование магнитного потока, что позволяет добиться большей эффективности, за счёт использования в 2 раза меньшего количества редкоземельных магнитов.
Как было уже сказано выше, износ двигателя такого типа при работе весьма несущественный, так как непосредственный физический контакт катушки и цилиндра-оси при работе практически отсутствует.
Принцип, на котором базируется работа линейных двигателей, заключается в проявлении силы, которая воздействует на проводник с током в магнитном поле, то есть на законе Ампера (исходя из которого можно сказать, что максимальное усилие, которое может развить двигатель – является произведением силы тока в обмотках на векторное произведение магнитной индукции поля на вектор длины провода в обмотках).
Источник: www.abamet.ru
Другими словами, можно сказать, что у обычного линейного двигателя примерно от 30 до 80% длины обмоток служит для протекания тока под прямым углом к вектору индукции поля, а оставшаяся часть обмоток, по сути, только тормозит движение. Но это касается только плоского двигателя! В отличие от него, устройство цилиндрического линейного двигателя позволяет практически на всей длине обмоток протекать току под оптимальным углом в 90 градусов.
Но это касается только плоского двигателя! В отличие от него, устройство цилиндрического линейного двигателя позволяет практически на всей длине обмоток протекать току под оптимальным углом в 90 градусов.
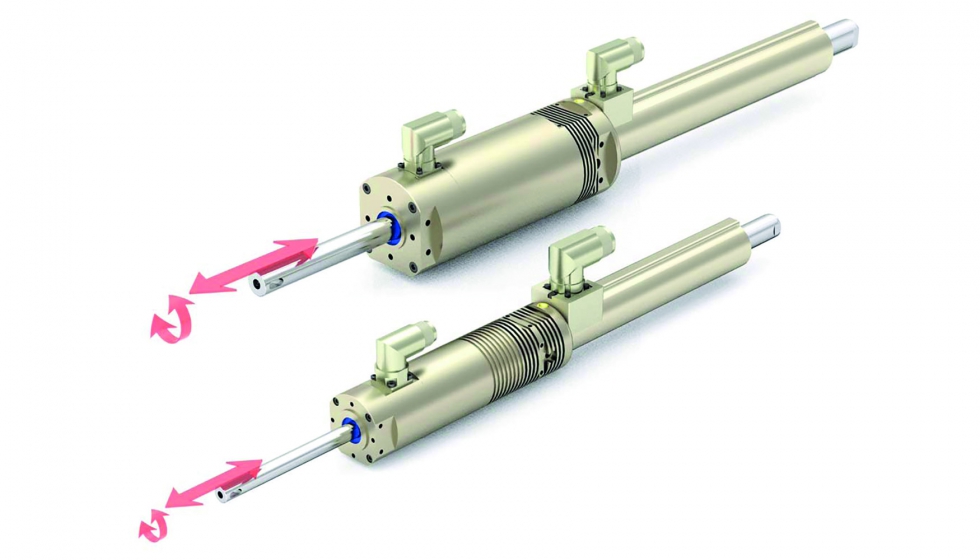
Для тех, кто хочет попробовать собрать подобный двигатель для собственных нужд, — я прикладываю ниже ссылку на диссертацию «Конструкция и сборка прецизионного линейного двигателя и контроллера» (Design and Construction of a Precision Tubular Linear Motor and Controller, — Bryan Craig Murphy), где достаточно подробно разобрана теоретическая база такого двигателя: Ссылка на диссертацию.
Согласно пункту 1.4 этой диссертации «Предлагаемая конструкция» (Proposed Design), автор рассматривает устройство, в котором движется шток, а блок катушек остаётся неподвижным (хотя это не суть, вы понимаете, что при желании можно двигать или то или то, или «всё сразу и много» © 🙂 ): устройство состоит из массива магнитов внутри массива электромагнитных катушек.
Катушки разделены на три фазы: A, B и C. В каждой фазе по три катушки; центральная катушка каждой фазы обращена в направлении, противоположном двум внешним. Таким образом, когда ток проходит через фазу катушек, центральная катушка будет генерировать магнитное поле равное по величине каждой из других катушек в этой фазе, но в противоположном направлении.
В каждой фазе по три катушки; центральная катушка каждой фазы обращена в направлении, противоположном двум внешним. Таким образом, когда ток проходит через фазу катушек, центральная катушка будет генерировать магнитное поле равное по величине каждой из других катушек в этой фазе, но в противоположном направлении.
Источник картинки: Диссертация «Design and Construction of a Precision Tubular Linear Motor and Controller, — Bryan Craig Murphy»
Как показано на рисунке выше, в двигателе используются цилиндрические постоянные магниты. Пары магнитов ориентированы в том же направлении и расположены напротив соседних пар магнитов. Алюминиевая прокладка помещается между парами противоположных магнитов для облегчения конструкции. Когда ток течёт по трём фазам катушек, катушки генерируют силы на постоянные магниты в соответствии с уравнением силы Лоренца.
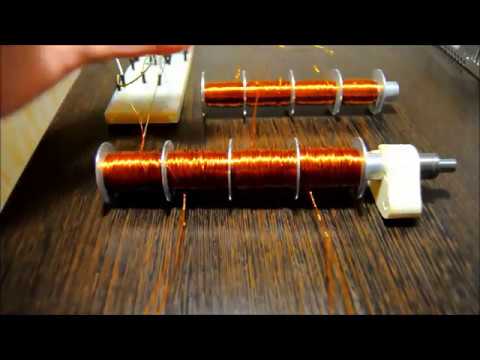
Самодельная конструкция, похожая на описанную (только всё наоборот — движется блок катушек) показана тут:
В своём нынешнем состоянии двигатель имеет время нарастания 55 мс, время установления 600 мс и перерегулирование 65 % при вводе с шагом в 1 см.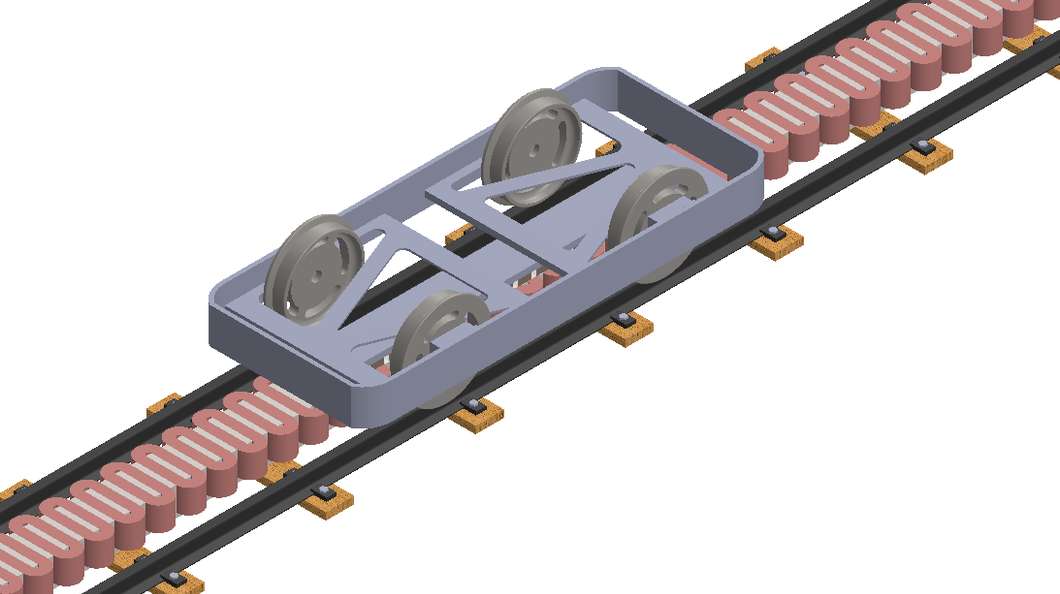 Мотор способен выдержать максимальную осевую нагрузку в 26,4 Н. Эта максимальная сила значительно меньше, чем у коммерческих двигателей сопоставимого размера, однако эта конструкция позволяет более плавное позиционирование без эффекта «зубчатого колеса».
Мотор способен выдержать максимальную осевую нагрузку в 26,4 Н. Эта максимальная сила значительно меньше, чем у коммерческих двигателей сопоставимого размера, однако эта конструкция позволяет более плавное позиционирование без эффекта «зубчатого колеса».
Работа заводского аппарата, примерно аналогичной конструкции, как в этой диссертации — показана на видео ниже:
Подытоживая, можно сказать, что широкое использование линейных двигателей только начинает свою жизнь, и каждый может попробовать собрать свою конструкцию. Тем более что благодаря своей простоте, — такой двигатель собирают даже энтузиасты. Для высокоточного движения в конструкции можно использовать датчики положения.
Как часть сервомеханизма, цилиндрические линейные двигатели могут обеспечить одновременное сочетание высокой тяги, высокой скорости и высокой точности, — далеко за пределами возможностей большинства других типов приводов.
Например, такие двигатели с некоторого времени стали устанавливать на 3d принтеры:
Теоретически, на цилиндрических линейных двигателях можно реализовать FDM 3d принтер, работающий на поразительных скоростях, очень точный, без вносимых стандартным передаточным трактом (зубчатые ремни, ШВП, винт/гайка и т. д) ошибок, если соответствующим образом позаботиться о высокопроизводительном экструдере и экстремально хорошем охлаждении — например, с применением охлаждающего потока воздуха в -50°C (используя трубку Ранка-Хилша).
д) ошибок, если соответствующим образом позаботиться о высокопроизводительном экструдере и экстремально хорошем охлаждении — например, с применением охлаждающего потока воздуха в -50°C (используя трубку Ранка-Хилша).
Цилиндрические линейные двигатели на постоянных магнитах не следует путать с цилиндрическими линейными асинхронными двигателями, которые работают по другому принципу.
Должны ли вы построить или купить свой собственный? (Как направлять)
Возможно, вам пришла в голову идея сделать собственный линейный привод своими руками. Независимо от того, ищете ли вы линейный привод для чего-то простого, например, для управления вентиляцией теплицы, или для более сложного, например, для подъемной системы для телевизора, у вас есть два варианта его приобретения — купить или построить.
Выбор варианта может быть сложным. Оба имеют разные процессы, преимущества, недостатки и результаты. Чтобы помочь вам сделать окончательный выбор, давайте подробнее рассмотрим варианты, проведя вас через соображения, преимущества и недостатки покупки или сборки привода.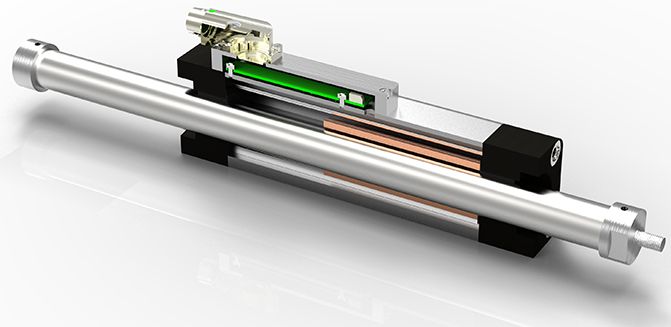
Что такое линейный привод?
Линейный привод — это устройство, которое изменяет вращательное движение двигателя для обеспечения движений толкания и тяги, позволяя приводу поднимать, опускать, наклонять, сдвигать и опрокидывать предметы одним нажатием кнопки.
Существует несколько областей применения линейных приводов. Некоторые области применения включают:
- Управление дроссельной заслонкой
- Домашняя автоматизация
- Робототехника и аниматроника
- Применение в сельском хозяйстве
- Люки с электроприводом
Линейные приводы обеспечивают полный контроль над целым рядом плавных и безопасных движений. Они также энергоэффективны, часто имеют длительный срок службы и требуют минимального обслуживания.
Типы линейных приводов
Линейные приводы делятся на три основные категории, каждая из которых отличается по принципу действия и применению, включая:
Гидравлические линейные приводы
Этот тип линейных приводов использует гидравлическую жидкость под давлением.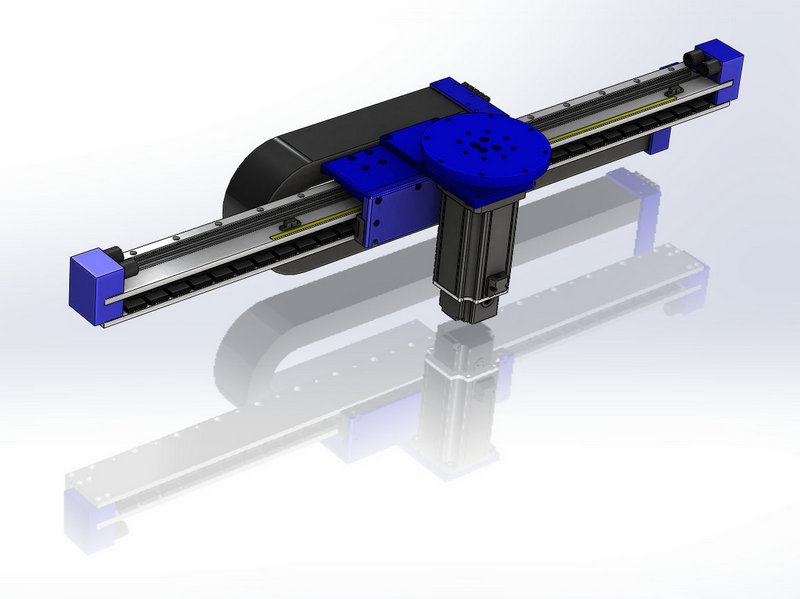 Они отлично подходят для приложений, требующих точного управления, механической жесткости и больших усилий.
Они отлично подходят для приложений, требующих точного управления, механической жесткости и больших усилий.
Однако они могут быть довольно громкими, выделять много тепла и нуждаться в регулярном обслуживании. Для их работы также требуется дополнительное оборудование, такое как насосы, выпускные клапаны и клапаны для жидкости.
Пневматические линейные приводы
Эти приводы используют сжатый воздух и используются в областях, где важна скорость. Некоторые из этих областей включают насосы, стоматологию, воздушные компрессоры, пистолеты для гвоздей, почтовые трубки и многое другое.
Электрические линейные приводы
Электрические линейные приводы состоят из двигателя, ходового винта и набора шестерен, которые толкают центральный стержень внутрь и наружу. От робототехники до погрузочно-разгрузочных работ и работы с солнечными панелями области применения электрических линейных приводов широко распространены.
Изготовление или покупка линейного привода
Помимо выбора типа линейного привода для вашего проекта, существует также вопрос выбора линейного привода, сделанного своими руками, или его покупки.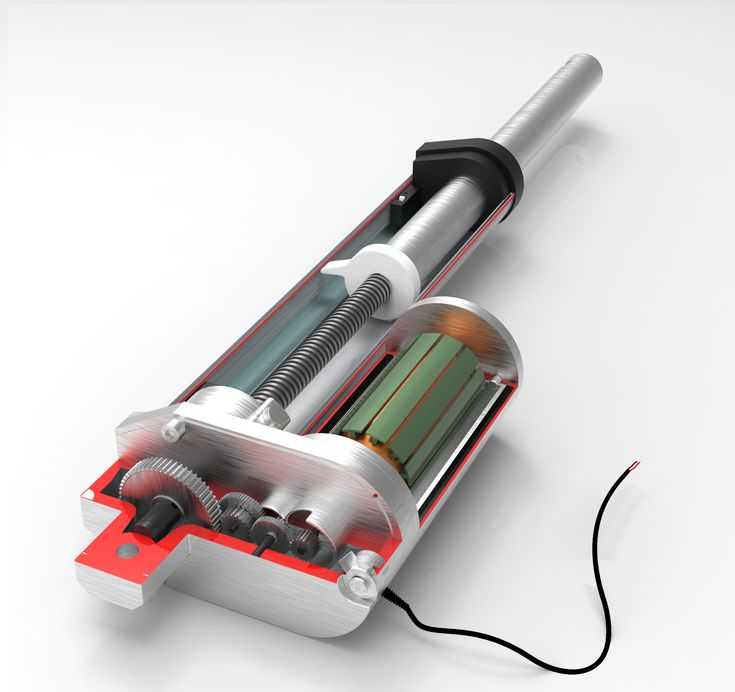 Вот что будет включать каждый из этих вариантов:
Вот что будет включать каждый из этих вариантов:
Покупка линейного привода
При покупке линейного привода необходимо учитывать некоторые факторы, такие как:
- Желаемый размер вертикально или горизонтально, штокового вала
- Крепление
- Как далеко и быстро будет перемещаться шток
- Как часто вы собираетесь его использовать
Ваши критерии и потребности проекта определят нужный вам привод. Перед покупкой убедитесь, что у вас есть как можно больше информации. Имея в виду эту информацию, опытный и лицензированный поставщик может провести вас через весь процесс и помочь вам приобрести привод, подходящий для вашего проекта.
Если вы впервые покупаете линейный привод, вам может быть сложно уследить за всем отраслевым жаргоном — не стесняйтесь задавать столько вопросов, сколько вам нужно.
Преимущества покупки линейного привода
- Легко интегрируемый с электронными системами и системами управления движением
- Требуется минимальное обслуживание и имеет более длительный срок службы
- Нижние потребности в мощности
- Особенности безопасности
- Часто меньше NOISY
SETBACK STACKS STACKS STABKEBBABLEBABLEBBACE OFBACE OT SETBACKS STABKEBBABLEBBABLESTBACK SETBACK SOTBACK OT SOISY . Хотя точный процесс сборки самодельного линейного привода будет зависеть от ваших конкретных целей, он обычно включает следующие шаги: Приобретите необходимые материалы и инструменты Вам потребуются материалы такие как смола, двигатель, гайки и болты M10, вазелин и многое другое. Помимо материала, вам также понадобятся такие инструменты, как молоток, ножовка и плоская отвертка. Конкретные инструменты и материалы, которые вам понадобятся, будут зависеть от ваших требований и масштабов проекта, а приобретение некоторых из них может повлечь за собой дополнительные расходы (обязательно примите это во внимание, принимая решение о строительстве или покупке). Изготовление приводной муфты Существует три различных типа приводных муфт. Во-первых, это жесткая связь. Основной проблемой этого варианта является трение и изгиб, возникающие при смещении вала. Второй тип представляет собой гибкую приводную муфту, которая является рекомендуемым вариантом. Гибкие муфты решают проблему трения и изгиба. У вас также есть возможность приобрести готовую гибкую приводную муфту. Изготовление толкателя Изготовьте основание, монтажный кронштейн двигателя и опору упорного подшипника При изготовлении монтажного кронштейна двигателя вам, возможно, придется подложить шайбы под головку каждого винта, чтобы винты не зашли слишком далеко и не деформировали корпус двигателя. . Поскольку муфта двигателя не предназначена для передачи продольной силы, крепление упорного подшипника помогает передавать усилие толкателя на основание, не нагружая муфту двигателя или сам двигатель. Добавить концевой выключатель Концевые выключатели представляют собой микровыключатели с плечом рычага и роликом. Включите концевой выключатель IN и OUT. Когда переключатель IN установлен рядом с опорой подшипника, переключатель OUT определяет присутствие толкателя в заданной точке от переключателя IN. Расположение этой точки зависит от того, насколько далеко вы хотите вытянуть удилище. Обратите внимание на проводку Толкающее и тянущее движение стержня становится возможным благодаря изменению полярности подаваемого напряжения. При подключении привода убедитесь, что используемые провода имеют толщину, необходимую для прохождения тока двигателя. Провода также должны быть многожильными, чтобы они могли выдерживать вибрацию двигателя. Вам потребуются диоды, чтобы концевой выключатель останавливал двигатель и вращал его в противоположном направлении. Установите диоды на прототип печатной платы, которую затем привинтите к основанию, расположенному под муфтой. Хотя диоды часто не пропускают ток, они все же должны проводить пусковой ток двигателя. Проверка производительности ваших линейных приводов После того, как вы закончите с проводкой, следующим шагом будет проверка производительности вашего привода. Здесь измерьте время, необходимое приводу для втягивания и выдвижения, попробовав его с различными нагрузками и токами двигателя. С самодельными системами линейного перемещения каждый проект уникален и сопряжен с уникальными проблемами. Эти проблемы могут варьироваться от выбора типа привода до установки резьбового стержня и внешнего корпуса. Вы даже можете столкнуться с ситуациями, которые требуют технических навыков, на которые вы не способны. Вам также понадобится подходящее рабочее место, если сборка требует нагрева ПВХ или использования клея, который может выделять токсичные пары. Никогда не выполняйте эти действия в непроветриваемом помещении. Преимущества создания привода Что лучше — купить или пойти по пути «сделай сам», зависит исключительно от вас, вашего уровня навыков, свободного времени и приемлемого уровня риска. Если вы все еще не можете принять решение, есть тест из трех пунктов, который поможет вам принять решение. Это конкретные вопросы, связанные с тремя основными факторами: временем, опытом и фактической стоимостью. Сопоставление времени, которое потребуется обоим вариантам, с учетом срочности вашего проекта может помочь вам определить, какой вариант вам больше подходит. Оценка имеющегося у вас опыта также поможет вам оценить свою способность обеспечить желаемую производительность, если вы будете собирать привод самостоятельно. Возможность столкнуться с проблемами во время вашего проекта «Сделай сам» добавляет несколько скрытых расходов, о которых вы могли не знать изначально. Если вы решите купить свой линейный привод, Creative Motion Control поможет реализовать некоторые преимущества самодельного привода без каких-либо недостатков. Мы сочетаем отличные технологии с исключительной поддержкой и обслуживанием клиентов, поставляя индивидуальные продукты, способные обеспечить непревзойденную производительность и инновации. Благодаря нашим разработкам и продуктам мы прочно закрепили за собой лидерство в отрасли производства систем управления линейным движением. От проектирования до производства, продажи и доставки — мы здесь, чтобы служить вам. Сделайте выбор в пользу удобства линейного привода, который не может обеспечить самодельный линейный привод. Свяжитесь с Creative Motion Control и получите предложение уже сегодня. Подробнее: ••• Medioimages/Photodisc/Photodisc/Getty Images Обновлено 25 апреля 2017 г. Автор: Carlos Mano Линейный двигатель работает по тому же принципу, что и обычный двигатель, — используя электричество и магнетизм для создания физического движения. Большая разница в том, что линейный двигатель приводит в движение что-то по прямой вместо того, чтобы вращать вал. Линейные двигатели используются для приведения в движение транспортных средств, таких как поезда, монорельсы и аттракционы в парках развлечений, которые движутся по рельсам. Когда линейные двигатели используются как пушки для приведения в движение объекта, они называются линейными ускорителями. У линейных двигателей есть много предполагаемых вариантов использования в будущем, и в настоящее время они представляют собой интересные научные проекты. Построить трассу. Под дорожкой находится набор магнитов, расположенных так, чтобы полюса, обращенные вверх, чередовались между севером (N) и югом (S). Когда транспортное средство движется по трассе, оно будет попеременно сталкиваться с N и S полюсами. Сделать транспортное средство, которое будет ездить по трассе. Единственным важным компонентом транспортного средства является электромагнит. Купить их можно в любом хобби-магазине. Если вы не можете найти такой, который подходит для вашего автомобиля, вы можете сделать его, обернув несколько футов эмалированной медной проволоки вокруг железного сердечника. Вы должны постараться расположить конец электромагнита как можно ближе к магнитам под гусеничным ходом. Сердечник электромагнита может выступать за днище автомобиля. Проверьте свой линейный двигатель и настройте его для повышения производительности. Электромагнит должен переключать полярность, когда он находится над магнитом, который будет его отталкивать, затем поступательное движение подтолкнет его к следующему магниту, который притянет его, в то время как предыдущий магнит оттолкнет его. Тонкая настройка производительности включает в себя эксперименты с расстоянием между магнитами и местами пересечения проводов. Использование роликов в месте соприкосновения транспортного средства с гусеницей уменьшит трение, но поиск роликов, проводящих электричество, может занять некоторое время. Покупка актуатора
Покупка актуатора Как собрать линейный привод
.jpg)
Неудачи при сборке актуатора

Купить или построить линейный привод: какой вариант выбрать?
 Глядя на фактические затраты проекта, вы можете проанализировать, сколько вам будет стоить покупка необходимых материалов и инструментов и исправление возможных ошибок.
Глядя на фактические затраты проекта, вы можете проанализировать, сколько вам будет стоить покупка необходимых материалов и инструментов и исправление возможных ошибок.
https://www.machinedesign.com/mechanical-motion-systems/linear-motion/article/21828986/electric-linear-actuators-make-or-buy Как сделать миниатюрный линейный двигатель
 Магниты под гусеницей будут управлять транспортным средством. Вдоль трассы будет два провода на поверхности, по которой движется транспортное средство. Между каждым магнитом провода падают под дорожку и пересекаются, так что провод, который был на левой дорожке, теперь находится на правой дорожке, и наоборот. Этот переход заставит электромагнит в транспортном средстве менять полярность, когда он движется по трассе. Прикрепите провода в начале дорожки к полюсам батареи.
Магниты под гусеницей будут управлять транспортным средством. Вдоль трассы будет два провода на поверхности, по которой движется транспортное средство. Между каждым магнитом провода падают под дорожку и пересекаются, так что провод, который был на левой дорожке, теперь находится на правой дорожке, и наоборот. Этот переход заставит электромагнит в транспортном средстве менять полярность, когда он движется по трассе. Прикрепите провода в начале дорожки к полюсам батареи.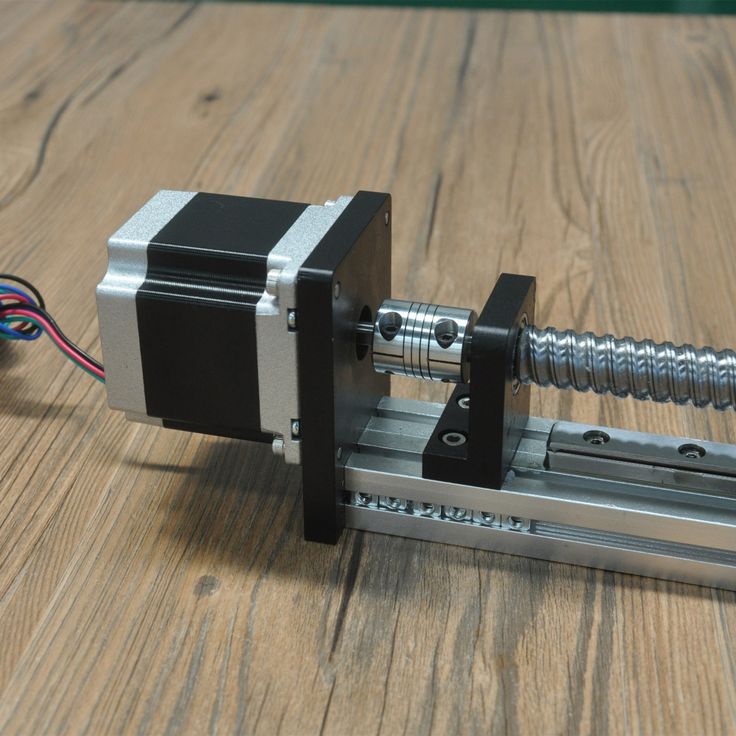 Один провод электромагнита должен быть прикреплен к левой стороне транспортного средства, чтобы он был в электрическом контакте с проводом на левой стороне гусеницы. Другой провод электромагнита должен быть прикреплен к правой стороне транспортного средства, чтобы он был в электрическом контакте с проводом на правой стороне гусеницы.
Один провод электромагнита должен быть прикреплен к левой стороне транспортного средства, чтобы он был в электрическом контакте с проводом на левой стороне гусеницы. Другой провод электромагнита должен быть прикреплен к правой стороне транспортного средства, чтобы он был в электрическом контакте с проводом на правой стороне гусеницы. Вещи, которые вам понадобятся
