Содержание
Волновые электродвигатели
- Подробности
- Категория: Электрические машины
- электродвигатель
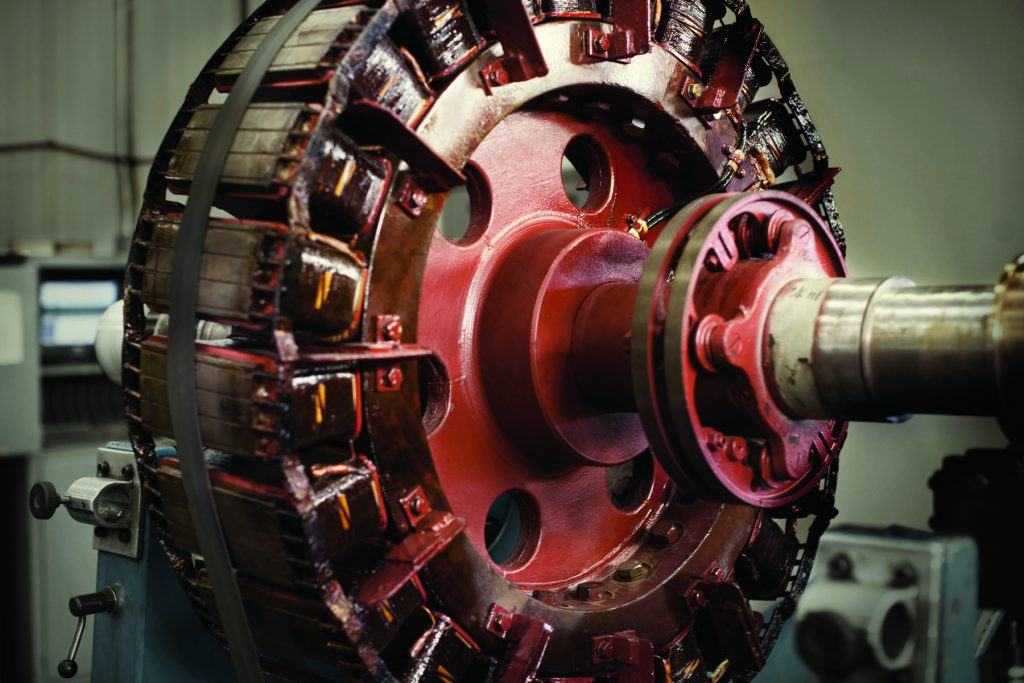
В электроприводах общепромышленного и специального назначения для снижения частоты вращения привода нашли применение волновые передачи (волновые редукторы), обладающие рядом ценных свойств. Основное из них заключается в обеспечении значительного передаточного отношения (до 100 на одну ступень) при относительно малых собственных массе и габаритах. Волновые передачи к тому же отличаются высокой кинематической точностью отработки перемещений, надежностью и долговечностью в работе. Волновой двигатель сочетает в себе специфические свойства волновой передачи и электрической машины, что достигнуто их конструктивным объединением.
Электропривод с волновыми механическими передачами строится по обычной схеме: двигатель — волновая передача. Основным достоинством волнового двигателя является низкая частота вращения его выходного вала при значительном вращающем моменте, что позволяет непосредственно соединять его с производственным механизмом. Масса и габариты привода при этом оказываются меньше, чем у привода той же мощности, выполненного по обычной схеме двигатель — редуктор. Двигатель обладает и хорошим быстродействием. Время его пуска при питании от сети 50 Гц составляет сотые доли секунды, а при отключении напряжения ротор двигателя останавливается примерно за то же время практически без выбега. Двигатель имеет также низкий уровень вибраций, чем выгодно отличается от рассмотренных выше двигателей с катящимся ротором.
Масса и габариты привода при этом оказываются меньше, чем у привода той же мощности, выполненного по обычной схеме двигатель — редуктор. Двигатель обладает и хорошим быстродействием. Время его пуска при питании от сети 50 Гц составляет сотые доли секунды, а при отключении напряжения ротор двигателя останавливается примерно за то же время практически без выбега. Двигатель имеет также низкий уровень вибраций, чем выгодно отличается от рассмотренных выше двигателей с катящимся ротором.
Рассмотрим принцип действия волнового двигателя, обратившись для этого к рис. 1. Главная особенность конструкции двигателя состоит в наличии гибкого цилиндрического ротора 1, который может деформироваться в радиальном направлении. На внешней поверхности ротора крепится гибкий зубчатый венец 2. На статоре двигателя 3, который по своей конструкции принципиально не отличается от статоров обычных двигателей переменного тока, крепится жесткий зубчатый венец 4. Гибкий венец ротора и жесткий венец статора образуют обычную волновую передачу.
Рис. 1. Принцип действия волнового двигателя. а — схема конструкции; б — распределение индукции и силы магнитного притяжения вдоль окружности статора; е —схема двигателя при работе.
Подключим обмотки статора двигателя к сети переменного тока. Тогда в зазоре между статором и ротором появится, как обычно, вращающееся магнитное поле. Предположим, что это магнитное поле имеет два полюса (число пар полюсов обмотки статора р = 1) и магнитная индукция поля В2 в зазоре двигателя распределяется по синусоидальному закону, показанному сплошной линией на рис. 1,6. Тогда на ферромагнитный ротор, как это мы уже установили, рассматривая двигатель с катящимся ротором, будет действовать сила магнитного притяжения FK-a, ось которой совпадает с положением максимума магнитной индукции. Значение этой силы пропорционально квадрату магнитной индукции, и график ее изобразится пунктирной кривой на рис. 1,6. В результате действия этой силы ротор деформируется (рис. 1,в) и его зубчатый венец входит в зацепление с зубчатым венцом статора в двух диаметрально противоположных точках окружности статора (в отличие от двигателя с катящимся ротором, где точка касания статора и ротора была одна). При вращении поля статора синхронно вращается и волна деформации ротора, в результате чего зубчатый ненец ротора обкатывает зубчатый ненец статора.
При вращении поля статора синхронно вращается и волна деформации ротора, в результате чего зубчатый ненец ротора обкатывает зубчатый ненец статора.
Рис. 2. Реактивный волновой двигатель с радиально-осевым магнитным штоком.
Обычно ненцы статора и ротора делают с различным числом зубцов Zc и Zp, поэтому при обкатывании ротор совершает еще и медленное вращение вокруг своей оси, которое аналогично медленному вращению ротора двигателя с катящимся ротором. Это вращение ротора вокруг своей оси и является главным выходным движением волнового двигателя, и частота пр определяется по формуле
(1)
Снижая разниму между количеством зубцов статорного и роторного венцов, получают весьма низкие частоты вращения выходного вала волнового двигателя.
По своим характеристикам рассмотренный волновой двигатель является синхронным реактивным двигателем. Действительно, ось деформации гибкого ротора вращается синхронно с осью магнитного поля и частота вращения вала двигателя постоянна и находится в фиксированном соотношении (1) с частотой вращения поля статора. Деформированный ротор при этом, как нетрудно заметить, занимает положение, при котором магнитное сопротивление магнитному потоку минимально. Поэтому при появлении рассогласования (несовпадении) оси поля статора и оси деформации ротора, которое наступает, например, при нагружении двигателя внешним моментом сопротивления, ротор двигателя начинает развивать синхронизирующий момент, как у обычного синхронного реактивного двигателя. Этот момент уравновешивает приложенный внешний момент нагрузки, и двигатель продолжает вращаться со скоростью пр при наличии некоторого пространственного углового сдвига между осями ротора и поля статора.
Деформированный ротор при этом, как нетрудно заметить, занимает положение, при котором магнитное сопротивление магнитному потоку минимально. Поэтому при появлении рассогласования (несовпадении) оси поля статора и оси деформации ротора, которое наступает, например, при нагружении двигателя внешним моментом сопротивления, ротор двигателя начинает развивать синхронизирующий момент, как у обычного синхронного реактивного двигателя. Этот момент уравновешивает приложенный внешний момент нагрузки, и двигатель продолжает вращаться со скоростью пр при наличии некоторого пространственного углового сдвига между осями ротора и поля статора.
Волновые двигатели могут быть также и индукторными, повторяя обычные синхронные индукторные двигатели.
Заметим, что магнитное поле двигателя выполняет по существу роль электромагнитного генератора механических волн деформации, необходимого для работы обычной волновой передачи, причем в реактивном двигателе число волн деформации равно числу полюсов магнитного поля.
Рассмотрим некоторые практические конструкции волновых двигателей.
На рис. 2 показана упрощенная схема конструкции волнового двигателя реактивного типа с радиально-осевым замыканием магнитного потока.
Ротор 1 двигателя представляет собой гибкий тонкостенный металлический или пластмассовый стакан, укрепленный на валу 2 двигателя. На внешней поверхности ротора находится гибкий венец 3 волновой передачи. Вдоль внутренней поверхности ротора располагаются подвижные относительно друг друга ферромагнитные секторы 4, которые под действием силы магнитного притяжения могут перемещаться в радиальном направлении и деформировать гибкий ротор. К ротору они прижимаются центрирующими эластичными кольцами 5.
Магнитная система статора двигателя образована П-образными ферромагнитными сердечниками 6, на которых располагаются двух- или трехфазные обмотки переменного тока 7, создающие вращающееся магнитное поле. На статоре крепится неподвижный венец 8 волновой передачи.
Статор и ротор располагаются в корпусе 9 двигателя.
При подаче напряжения переменного тока на обмотки 7 двигателя сила магнитного притяжения действует на ферромагнитные секторы 4\ последние, притягиваясь к статору, деформируют ротор, который и приобретает форму, показанную на рис. 1 ,в.
На рис. 3 показана еще одна конструктивная схема волнового двигателя с радиальным замыканием магнитного потока.
Статор двигателя, размещенный в корпусе 1, имеет обычную для двигателей переменного тока конструкцию. Сердечник 2 статора набран из листов электротехнической стали, и в его пазы уложена двух- или трехфазная обмотка переменного тока 3, создающая вращающееся магнитное поле. На статоре крепится жесткий зубчатый венец 4 волновой передачи.
Гибкий ротор 5 имеет обычную для волнового двигателя конструкцию, и на его поверхности закреплен гибкий венец 6 волновой передачи.
Внутри ротора располагается упругое ферромагнитное кольцо 7, которое деформирует ротор под действием сил магнитного притяжения и одновременно является магнитопроводом. Кольцо 7 навивается из ленты ферромагнитного материала, например пермаллоя. Рассмотренная конструкция соответствует реактивному волновому двигателю.
Кольцо 7 навивается из ленты ферромагнитного материала, например пермаллоя. Рассмотренная конструкция соответствует реактивному волновому двигателю.
По конструктивным схемам, приведенным на рис. 2 и 3, может быть выполнен и индукторный волновой двигатель, который имеет лучшие энергетические показатели работы и развивает больший момент, чем реактивный волновой двигатель. Для индукторного двигателя характерно наличие на сердечнике статора помимо обмотки переменного тока еще и обмотки постоянного тока, с помощью которой в двигателях создается неизменный по направлению магнитный поток. Суммируясь, магнитные потоки обмоток переменного тока с индукцией Вс и обмотки постоянного тока с индукцией В„ образуют результирующее магнитное поле с индукцией Въ, распределение которой вдоль воздушного зазора для числа пар полюсов р= 1 показано сплошной линией на рис. 4,а и для р—2 на рис. 4,6. На этих же рисунках пунктиром показан график силы магнитного притяжения FM.u. Из рис. 4 видно, что в отличие от реактивного волнового двигателя ротор индукторного двигателя имеет число волн деформации, равное числу пар полюсов р. Необходимо при этом отметить, что промежуточная волна силы магнитного притяжения недостаточна по амплитуде для осуществления зацепления.
Необходимо при этом отметить, что промежуточная волна силы магнитного притяжения недостаточна по амплитуде для осуществления зацепления.
Рис. 3. Волновой двигатель с радиальным магнитным потоком.
Для получения симметричной деформации ротора стремятся иметь p> 2 (рис. 4,6), что снижает уровень вибрации волнового двигателя.
Отметим в заключение, что широкое применение волновых двигателей ограничивается сложностью конструкции и технологии изготовления эластичного ротора. Нецелесообразным пока из-за сравнительно невысоких
Рис. 4. Распределение индукции и силы магнитного притяжения индукторного волнового двигателя. а — при р— 1; б—при р= 2.
энергетических показателей является выпуск волновых двигателей на средние и большие мощности.
- Назад
- Вперёд
- Вы здесь:
- Главная
- Эл. машины
- Волновые электродвигатели
 org/ListItem»> Оборудование
org/ListItem»> ОборудованиеЕще по теме:
- Испытания по определению электрических величин электрических машин
- Основные повреждения электродвигателей
- Двигатели типа ДАБ
- Методы сушки электрических машин
- Автоматизация испытаний электрических машин
Волновой двигатель — Большая Энциклопедия Нефти и Газа, статья, страница 1
Cтраница 1
Волновые двигатели имеют хорошие динамические характеристики. Время пуска микродвигателя с номинальной частотой / [ 50 Гц достигает 3 — 4 мс. Ротор имеет довольно малый момент инерции, вращается с низкой угловой скоростью, и быстродействие двигателя зависит в основном не от кинетической энергии вращения ротора, а от кинетической энергии перемещающихся в радиальном направлении масс деформирующегося ротора. Это значит, что время пуска определяется практически временем деформации ротора до зацепления венцов волновой передачи. При отключении, напряжения питания волна деформации исчезает так же быстро и ротор останавливается практически без выбега. В волновых двигателях при числе волн деформаций D 2 вращающиеся массы динамически уравновешены, что обеспечивает более низкий уровень вибрации, чем у двигателей с катящимся ротором.
Это значит, что время пуска определяется практически временем деформации ротора до зацепления венцов волновой передачи. При отключении, напряжения питания волна деформации исчезает так же быстро и ротор останавливается практически без выбега. В волновых двигателях при числе волн деформаций D 2 вращающиеся массы динамически уравновешены, что обеспечивает более низкий уровень вибрации, чем у двигателей с катящимся ротором.
[1]
Новый волновой двигатель, Доклады АН СССР, Нов.
[2]
В волновом двигателе гибкий ротор в силу особенности кинематической связи со статором ( зубчатое зацепление) не может вращаться со скоростью поля. Синхронно с полем перемещается вдоль расточки волна деформации гибкого ротора и происходит изменение проводимости рабочего зазора. Модуляция проводимости зазора обусловливает появление синхронного реактивного момента. Реактивный момент при врапХении поля стремится удержать ротор в таком положении, чтобы проводимость зазора на пути магнитного потока машины была максимальной.
[3]
Электромашинная часть волнового двигателя создает вращающий момент и является электромагнитным генератором механических волн деформации для волновой передачи.
[4]
Таким образом, реактивный волновой двигатель ( РВД) — двигатель без возбуждения и синхронный волновой двигатель ( СВД) — двигатель с возбуждением — являются электрическими машинами параметрического типа.
[5]
По своим характеристикам рассмотренный волновой двигатель является синхронным реактивным двигателем. Действительно, ось деформации гибкого ротора вращается синхронно с осью магнитного поля и частота вращения вала двигателя постоянна и находится в фиксированном соотношении ( 9) с частотой вращения поля статора. Деформированный ротор при этом, как нетрудно заметить, занимает положение, при котором магнитное сопротивление магнитному потоку минимально. Поэтому при появлении рассогласования ( несовпадении) оси поля статора и оси деформации ротора 1 которое наступает, например, при нагружении двигателя внешним моментом сопротивления, ротор двигателя начинает развивать синхронизирующий момент, как у обычного синхронного реактивного двигателя. Этот: момент уравновешивает приложенный внешний момент нагрузки, и двигатель продолжает вращаться со скоростью Пр при наличии некоторого пространственного углового сдвига между осями ротора и поля статора.
Этот: момент уравновешивает приложенный внешний момент нагрузки, и двигатель продолжает вращаться со скоростью Пр при наличии некоторого пространственного углового сдвига между осями ротора и поля статора.
[6]
| Синхронный волновой электродвигатель.
[7] |
Отмеченное свойство выгодно отличает волновой двигатель от ДКР. Однако необходимость обеспечения эластичности ротора в сочетании с требуемой толщиной маг-нитопровода определяет существенные конструктивные и технологические трудности в реализации волновых двигателей с высокими энергетическими и весовыми показателями.
[8]
Рассмотрим некоторые практические конструкции волновых двигателей.
[9]
В зависимости от способа возбуждения волновые двигатели можно разделить на два типа: реактивные, у которых ротор намагничивается магнитным полем обмотки статора; с активным или возбужденным ротором с помощью обмотки постоянного тока, либо постоянным магнитом. В последнем случае обмотка постоянного тока выполняется в виде кольцеиой катушки, охватывающей ось вала и создающей униполярное аксиально-радиальное поле. Аналогичное поле создает также и постоянный магнит, выполняемый в виде полого цилиндра и намагничиваемый в аксиальном направлении.
В последнем случае обмотка постоянного тока выполняется в виде кольцеиой катушки, охватывающей ось вала и создающей униполярное аксиально-радиальное поле. Аналогичное поле создает также и постоянный магнит, выполняемый в виде полого цилиндра и намагничиваемый в аксиальном направлении.
[10]
В отличие от ДКР ротор волнового двигателя сбалансирован, вследствие этого в машине отсутствуют вибрации. Однако необходимость иметь эластичный ротор вызывает значительные конструктивные и технологические трудности в реализации волновых электродвигателей с высокими энергетическими показателями. В данном случае число волн деформации U p и обмотка двухволнового двигателя должна быть четырехполюсной. Расчет момента волнового двигателя представляет собой довольно сложную задачу и в настоящей книге не рассматривается.
[11]
В отличие от ДКР ротор волнового двигателя сбалансирован, вследствие этого в машине отсутствуют вибрации. Однако необходимость иметь эластичный ротор вызывает значительные конструктивные и технологические трудности в реализации волновых электродвигателей с высокими энергетическими показателями. В данном случае число волн деформации и р, и обмотка для получения двухволнового двигателя должна быть четырехполюсной. Расчет момента волнового двигателя представляет собой довольно сложную задачу и в настоящей книге не рассматривается.
В данном случае число волн деформации и р, и обмотка для получения двухволнового двигателя должна быть четырехполюсной. Расчет момента волнового двигателя представляет собой довольно сложную задачу и в настоящей книге не рассматривается.
[12]
На рис. 42.5 изображена конструктивная схема синхронного волнового двигателя, состоящего из: шихтованного статора / с многофазной обмоткой, жесткого зубчатого колеса 2 волновой передачи, закрепленного по внутренней окружности статора, зубчатого венца 3 на поверхности гибкого магнито-провода ротора в виде тонкого пакета 4, навитого в несколько слоев из стальной ленты. Этот пакет с венцом зубьев закрепляется на тонкостенном стальном цилиндре с дном, насаженным на вал 5 двигателя. Ввиду гибкой конструкции ротор имеет возможность деформироваться в радиальном направлении под влиянием магнитных сил вращающегося поля в воздушном зазоре, создаваемого многофазной обмоткой статора.
[13]
Распределение индукции и силы магнитного притяжения.
[14] |
Отметим в заключение, что широкое применение волновых двигателей ограничивается сложностью конструкции и технологии изготовления эластичного ротора.
[15]
Страницы:
1
2
3
Роторно-волновой двигатель с высоким КПД седунова вихрова паровой самый
Производство двигателей и турбин Производство машин и оборудования Производство транспортных средств и оборудования Прорывные технологии Технологии, ожидающие финансирования
Роторно-волновой двигатель является синергией поршневого и газотурбинного двигателя.
Роторно-волновой двигатель с расчетным механическим КПД – 97 % имеет высокий ресурс по износу деталей и ресурсу двигателя в целом – будут изнашиваться только подшипники, которые имеют большой запас по износу.
Технология ожидает финансирования!
Описание роторно-волнового двигателя
Роторно-волновой двигатель имеет следующий принцип работы
Роторно-волновой двигатель в сравнении с лопаточными и поршневыми машинами
Преимуществароторно0волнового двигателя
Роторно-волновой двигатель может применяться
Описание роторно-волнового двигателя:
Роторно-волновой двигатель – это объемная машина, воспроизводящая последовательность работы газотурбинного двигателя. В нем совершенно устранено возвратно-поступательное движение рабочих органов, ротор полностью уравновешен и вращается с постоянной угловой скоростью. Рабочее тело, как и в турбине, движется вдоль оси двигателя, траектория движения – винтовая линия. В конструкции отсутствует вредное пространство, ограничивающее рост степени сжатия рабочего тела. Из-за отсутствия уплотнительных элементов и, соответственно трения в проточной части, снимаются ограничения по ресурсу и числам оборотов двигателя.
В нем совершенно устранено возвратно-поступательное движение рабочих органов, ротор полностью уравновешен и вращается с постоянной угловой скоростью. Рабочее тело, как и в турбине, движется вдоль оси двигателя, траектория движения – винтовая линия. В конструкции отсутствует вредное пространство, ограничивающее рост степени сжатия рабочего тела. Из-за отсутствия уплотнительных элементов и, соответственно трения в проточной части, снимаются ограничения по ресурсу и числам оборотов двигателя.
В основе кинематики РВД лежит сферический механизм, где оси его основных деталей пересекаются в одном месте – центре воображаемой сферы.
Установленный с минимальным зазором конический винтовой ротор совмещает вращение с противоположным ему планетарным обкатыванием по внутренним огибающим корпуса. Накладывая два эти вида движения на любые сечения ротора (кроме центра – точки его перегиба), можно увидеть, что они совершают в определенной последовательности равные угловые колебания в пазах корпуса, образуя волны, которые последовательно перекатываются по ходу винтовых поверхностей корпуса. Аналогичный процесс можно видеть на море, наблюдая в ветреную погоду за перемещением волн в «стоячей воде».
Аналогичный процесс можно видеть на море, наблюдая в ветреную погоду за перемещением волн в «стоячей воде».
В компрессорном отсеке формирование и движение волн начинается от периферии по направлению к центру, а в расширительном отсеке – наоборот – от центра к периферии.
1 – Ротор; 2 – Корпус; 3 – Вал отбора мощности; 4 – Шарнир равных угловых скоростей; 5 – Эксцентрик; 6 – Блок шестерен. А – впускное окно, Б – выпускное окно, В – компрессорный отсек, Г – камера сгорания, Д – расширительный отсек, φ – угол наклона ротора.
Ротор (1) и вал отбора мощности (3) соединяются между собой в центре двигателя шарниром Гука (4), который можно назвать шарниром равных угловых скоростей (ШРУСом). Необходимое ротору «дополнительное» обкатывание по внутренним огибающим корпуса задается вспомогательным устройством – так называемым «генератором волн». Его основной элемент – вращающийся на основном валу эксцентрик (5), с приводом через блок шестерен (6) все от того же вала. Эксцентрик, наклоняя ротор от 3 до 6 градусов, обеспечивает угловое качание сечениям ротора в пределах от 12 до 24 градусов. В такой комплектации расчетный механический КПД двигателя составит – 97 %.
В такой комплектации расчетный механический КПД двигателя составит – 97 %.
Возможность использования регенеративных схем теплообмена в РВД способствует максимальной степени выделения в работу химической энергии сгорания топлива:
Роторно-волновой двигатель имеет следующий принцип работы:
Как и в газовой турбине, газ в РВД перемещается между рабочими отсеками: от компрессора к ресиверу, далее в совмещенную или разделенную камеру сгорания с камерой расширения, используя режим непрерывного течения порций газа по каналам, при давлениях и температурах аналогично происходящих в камерах сгорания ДВС. Каждая порция газа, двигаясь в общем потоке, представляет из себя непрерывно изменяющийся в объеме, замкнутый капсулированный объем.
С началом вращения, винтовые поверхности ротора начинают открывать внутренние полости винтовых каналов компрессорного отсека, засасывая и них воздух двумя потоками, смещенными относительно друг друга на 180 градусов. За один оборот ротора в оба канала компрессорного отсека засасываются и отсекаются от впускного тракта по две порции воздуха. При дальнейшем повороте, каждая порция воздуха начнет самостоятельно перемещаться к центру двигателя, непрерывно сокращаясь в объеме за счет уменьшения шага и амплитуды самого витка. Процесс сжатия будет продолжаться до тех пор, пока все уменьшающийся объем со сжатым воздухом не подойдет к камере сгорания. В этот момент процесс внутреннего сжатия воздуха в компрессорном отсеке закончится, наступает следующий этап – выталкивание сжатого воздуха в камеру сгорания тыльной стороной витка, ближе других находящегося к центру ротора. Этот процесс сопровождается непрерывным распыливанием топлива в воздушном потоке с последующим его сгоранием в общей камере, куда и выталкиваются все порции воздуха. Для первоначального поджигания топливовоздушной смеси в камере устанавливается запальная свеча. После запуска дальнейшее поджигание смеси должно поддерживаться газами, оставшимися от предыдущих циклов в общей камере сгорания. Последние, с высокой температурой и давлением покидая камеру сгорания, заполняют на роторе винтовые каналы расширительных отсеков, расположенных по другую сторону от центра ротора (точки, где шаг и амплитуда угловых колебаний равна нулю).
При дальнейшем повороте, каждая порция воздуха начнет самостоятельно перемещаться к центру двигателя, непрерывно сокращаясь в объеме за счет уменьшения шага и амплитуды самого витка. Процесс сжатия будет продолжаться до тех пор, пока все уменьшающийся объем со сжатым воздухом не подойдет к камере сгорания. В этот момент процесс внутреннего сжатия воздуха в компрессорном отсеке закончится, наступает следующий этап – выталкивание сжатого воздуха в камеру сгорания тыльной стороной витка, ближе других находящегося к центру ротора. Этот процесс сопровождается непрерывным распыливанием топлива в воздушном потоке с последующим его сгоранием в общей камере, куда и выталкиваются все порции воздуха. Для первоначального поджигания топливовоздушной смеси в камере устанавливается запальная свеча. После запуска дальнейшее поджигание смеси должно поддерживаться газами, оставшимися от предыдущих циклов в общей камере сгорания. Последние, с высокой температурой и давлением покидая камеру сгорания, заполняют на роторе винтовые каналы расширительных отсеков, расположенных по другую сторону от центра ротора (точки, где шаг и амплитуда угловых колебаний равна нулю). С поворотом последнего происходит увеличение объемов расширительных отсеков за счет чего и осуществляется рабочий ход. На момент максимального расширения, кромки наружных витков ротора открываются и газы сначала свободно, а затем принудительно выдавливаются в выпускной коллектор. Интервал выпуска отработанных газов из очередной камеры расширения составит 180 градусов. Часть полученной в цикле мощности возвращается телом ротора в компрессорный отсек.
С поворотом последнего происходит увеличение объемов расширительных отсеков за счет чего и осуществляется рабочий ход. На момент максимального расширения, кромки наружных витков ротора открываются и газы сначала свободно, а затем принудительно выдавливаются в выпускной коллектор. Интервал выпуска отработанных газов из очередной камеры расширения составит 180 градусов. Часть полученной в цикле мощности возвращается телом ротора в компрессорный отсек.
Роторно-волновой двигатель в сравнении с лопаточными и поршневыми машинами:
| ДВС | ГТУ | Роторно-волновой двигатель |
| Полный цикл рабочего тела осуществляется в одном цилиндре (вспомогательные такты заставляют конструировать органы газораспределения) | Процессы цикла распределены между отдельными агрегатами (отсутствие органов газораспределения) | Процессы цикла распределены между отдельными агрегатами (отсутствие органов газораспределения) |
| Высокое давление и температура сгорания топливо-воздушной смеси | Низкое давление и температура сгорания топливо-воздушной смеси | Высокое давление и температура сгорания топливо-воздушной смеси |
Оптимальная работа при а (коэфф. избытка воздуха), близких к 1. избытка воздуха), близких к 1. | Оптимальная работа с а от 3+5 и выше | Оптимальная работа при а , близких к 1 |
| ‘Хорошая экономичность | Низкая экономичность | Высокая экономичность |
| Оптимальный диапазон реализуемых мощностей от 0,1 до 1000 кВт | Оптимальная мощность от 1000 до 100000 кВт | Оптимальная мощность от 1 до 100000 кВт |
| Каждый тип объемной машины работает на своем сорте топлива | Потребляет любой вид жидкого или газообразного топлива | Потребляет любое жидкое, газообразное, твердое распыленное топливо |
| Двигатель работает с охлаждением | Двигатель работает без охлаждения | Двигатель работает без охлаждения |
| Работа сопровождается неполным расширением отработанных газов | Полное расширение отработанных газов | Полное расширение отработанных газов |
| Эффективное глушение выхлопа | Неэффективное глушение выхлопа | Отсутствие необходимости глушениявьшюпа |
| Высокий вес силовой установки: 1+20 кг/кВт | Низкий вес силовой установки: до 0,1 кг/кВт | Вес силовой установки в пределах 0,1+0,25 кг/кВт |
При движении звеньев механизма в цепи присутствуют «мертвые точки». Для их преодоления устанавливается маховик Для их преодоления устанавливается маховик | Отсутствие «мертвых точек» при движении механизма | Отсутствие «мертвых точек» при движении механизма |
| Неполное уравновешивание инерционных сил и их моментов | Неуравновешенных сил и моментов не возникает | Полное уравновешивание инерционных сил, или вообще неуравновешенных сил не возникает |
| Большие потери на трение (15+20%) | Низкие потери на трение (2+4%) | Низкие потери на трение (3+6%) |
| Выбраны резервы роста эффективного КПД | Выбраны резервы роста эффективного КПД | Существует тенденция роста эффективного кпд |
Преимущества роторно-волнового двигателя:
– роторно-волновой двигатель имеет неограниченную мощность, малые габариты и вес (0.25-0.40 кг/кВт), высокую экономичность, свободу выбора топлива;
– рабочий процесс для камеры постоянного горения, позволяет, не останавливая двигатель, подавать в него любой вид жидкого, газообразного или даже твердого распыленного топлива;
– высокий ресурс по износу деталей и ресурсу двигателя в целом. В двигателе будут изнашиваться только подшипники, а для них ресурс в 30 – 40 тыс. рабочих часов не предел;
В двигателе будут изнашиваться только подшипники, а для них ресурс в 30 – 40 тыс. рабочих часов не предел;
– роторно-волновой двигатель не имеет ограничений по ресурсу и числам оборотов из-за отсутствия уплотнительных элементов и, соответственно трения в проточной части;
– ротор вращается с постоянной угловой скоростью и уравновешивается;
– вместо клапанов, или окон, в конструкции используются каналы неограниченной пропускной способности для непрерывного поступления воздуха в рабочие отсеки двигателя;
– в РВД газовые силы, действующие на ротор, постоянны и непрерывны, что делает ненужной установку маховика, а в некоторых случаях и противовесов, применяемых для полного уравновешивания двигателя;
– расчетный индикаторный КПД простого цикла РВД в адиабатном исполнении и умеренной степени сжатия равной 15 со степенью расширения 36 составит – 51 %. Расход топлива в этом случае может составить 171 г/кВт, при удельном весе силовой установки 0,15 – 0,25 кг/кВт;
– расчетный механический КПД двигателя составляет – 97 %.
Роторно-волновой двигатель может применяться:
– в легких вертолетах, самолетах и дирижаблях;
– в быстроходных катерах, экранопланах;
– в мощных вездеходах, передвижных электростанциях;
– в приводном оборудовании для нефтегазового комплекса.
автомобильный двигатель на катере
высокие обороты при запуске двигателя
высокий кпд теплового двигателя
газовые турбины авиационных двигателей
газовый и бензиновый двигатели
двигатели работающие на газовом топливе
для катера купить с высоким кпд
двигатель на приору 16 клапанов новый
двигатель ваз 2112 16 клапанов цена новый
новый двигатель ваз 2110 8 клапанов цена
газовое оборудование на дизельный двигатель
роторно поршневой двигатель купить
роторный двигатель внутреннего сгорания
стационарные двигатели для катеров катера купить
характеристика газового двигателя роторного двигателя
купить двигатель ваз 2107 инжектор цена новый
в цилиндре двигателя внутреннего сгорания давление
двигатель внутреннего сгорания характеристики кпд
работа совершенная двигателем внутреннего сгорания
купить двигатель приора 16 клапанов
купить новый двигатель фольксваген
свечи для газовых двигателей
устройство газового двигателя
мощность двигателя катера
новые двигатели на автомобили
рабочие циклы система седунова вихрова паровой самый
Коэффициент востребованности
4 457
СПИРАЛЬНЫЙ РОТОРНО-ВОЛНОВОЙ ДВИГАТЕЛЬ — new free technology
 w3.org/1999/xhtml» cellspacing=»0″>
w3.org/1999/xhtml» cellspacing=»0″>Иванов Вячеслав Геннадьевич
Доцент Псковского политехнического института
Двигатель, в соответствии с требованиями времени, должен отличаться от известных не просто отдельными параметрами, а значительным их улучшением: увеличением ресурса и эксплуатационной надежности, снижением затрат на создание, изготовление и эксплуатацию. Более 60% теплоты, вырабатываемой при сгорании топлива в двигателях внутреннего сгорания, просто уходит в атмосферу. Снижение потерь — и есть резерв совершенствования энергетических и экономических характеристик, направление научного поиска и конструкторской мысли. Другим направлением — является совершенствование экологических характеристик. Несомненно, имеют перспективу только те технические решения, которые смогут преодолеть основные недостатки известных тепловых машин. Такой двигатель может быть разработан на основе управления процессом горения топлива.
Предлагаем конструкцию двигателя (патент России № 2304225), в котором может быть реализован цикл нормального равномерного горения смесей. Общий вид двигателя показан при снятой боковой стенке, рис1. В корпусе двигателя выполнены спиралеобразные полости, рис.2, в которых размещены эксцентрично подобные спиралеобразные нагнетатели, установленные на общем для компрессорного и расширительного отсеков роторе, вращающемся на кривошипе вала. Нагнетатели сдвигаются (качаются) в полостях по траектории кривошипа с помощью механизма вращения с передаточным отношением относительно корпуса равным единице, например с помощью блока шестерен. Нагнетатели центральными и периферийными спиральными поверхностями контактируют, со спиральными поверхностями полостей в точках Т (Т1, Т2, Т3), образуя с обеих его сторон замкнутые в виде волн динамические камеры с активными рабочими областями V (V1, V2, V3), рис.3. Волнообразные камеры в компрессионных полостях смещаются в сторону центра спирали, уменьшая объемы V, а в расширительных — смещаются в сторону увеличения радиуса спирали, увеличивая свои объемы. Коэффициент сжатия смеси зависит от геометрических параметров волнообразных камер компрессионного и расширительного отсеков.
Общий вид двигателя показан при снятой боковой стенке, рис1. В корпусе двигателя выполнены спиралеобразные полости, рис.2, в которых размещены эксцентрично подобные спиралеобразные нагнетатели, установленные на общем для компрессорного и расширительного отсеков роторе, вращающемся на кривошипе вала. Нагнетатели сдвигаются (качаются) в полостях по траектории кривошипа с помощью механизма вращения с передаточным отношением относительно корпуса равным единице, например с помощью блока шестерен. Нагнетатели центральными и периферийными спиральными поверхностями контактируют, со спиральными поверхностями полостей в точках Т (Т1, Т2, Т3), образуя с обеих его сторон замкнутые в виде волн динамические камеры с активными рабочими областями V (V1, V2, V3), рис.3. Волнообразные камеры в компрессионных полостях смещаются в сторону центра спирали, уменьшая объемы V, а в расширительных — смещаются в сторону увеличения радиуса спирали, увеличивая свои объемы. Коэффициент сжатия смеси зависит от геометрических параметров волнообразных камер компрессионного и расширительного отсеков. Разделенная нагнетателем сгорающая смесь, образует два волнообразных автономных потока, сдвинутых по фазе друг относительно друга.
Разделенная нагнетателем сгорающая смесь, образует два волнообразных автономных потока, сдвинутых по фазе друг относительно друга.
Модульное исполнение двигателя позволяет создавать на основе его различные схемы горения топливной смеси.
1. В случае нормального горения камера сгорания, вместе с размещенными в ней форсунками и свечами зажигания, может располагаться между компрессорным и расширительным отсеками, как на рис.2, и занимать фиксированное положение. Топливные форсунки могут быть размещены перед компрессионным отсеком, в области впускного окна, и тогда топливо хорошо смешивается с воздухом и только после этого поступает в камеру сгорания. По сути камера сгорания служит лишь для поджигания смеси, а сгорание топлива происходит в динамических расширяющихся камерах V. После воспламенения смеси свеча зажигания отключается, а вновь поступающие волнообразные порции топливной смеси воспламеняются под влиянием горения смеси сопряженного потока. Длина расширительной спиралеобразной полости, число волн и длительность перемещения по ней волновых камер V рассчитывается из условия полного сгорания смеси. Это позволяет получить максимальный момент на валу и снизить до минимума выбросы газов в атмосферу.
Это позволяет получить максимальный момент на валу и снизить до минимума выбросы газов в атмосферу.
2. В двигателе может быть реализован комбинированный непрерывный рабочий цикл, состоящий из двух известных:расширения сгорающей топливной смеси (газовый) и теплового расширения водяных паров (паровой). Это достигается путем впрыскивания воды или водяного пара в отделенные от камеры сгорания замкнутые точками Т объемы V, не затрагивая процесс возгорания в камере сгорания топливной смеси. При этом объединение двух рабочих циклов в один непрерывный последовательно-параллельный цикл, обеспечивает срабатывание в течение нескольких оборотов вала всего избыточного давления и тепла рабочих газов и пара и, соответственно, обеспечивает их суммарный КПД.
3. Спиралеобразные секции могут найти применение в двигателях с внешним подводом тепла, рис.4. В двигателе с внешним подводом тепла такты сжатия и расширения осуществляются в разных отсеках: компрессионном и расширительном, которые связаны между собой через компрессионную и расширительную магистрали. В компрессионной магистрали находится охладитель, а в расширительной – нагреватель.
В компрессионной магистрали находится охладитель, а в расширительной – нагреватель.
4. На основании роторно-волнового может быть решена задача парового двигателя, в котором, как в турбине, пар поступает в спиралеобразную полость и, расширяясь создает давление на нагнетатель.
В двигателе обеспечивается равномерный крутящий момент при низкой и высокой частоте вращения ротора, что позволяет при использовании его в мобильных транспортных средствах исключить необходимость применения многоступенчатых коробок передач. Установка на роторе исполнительного механизма практически устраняет механические потери. То есть потенциальная энергия топлива через нагнетатель и ротор непосредственно преобразуется в кинетическую энергию движения исполнительного механизма. Малая масса вращающихся деталей, их малое количество, сбалансированность инерционных сил — характеризуют конструктивные параметры двигателя. Частота волн, а следовательно скорость вращения вала, может быть менее одного оборота в секунду или достигать нескольких сотен.
Двигатель может найти применение: в авиационной промышленности, например вертолетостроении, для оснащения беспилотных летательных аппаратов. В автомобилестроении – с передачей сил на вал и снижением выбросов до минимума. В газовой, нефтяной и других отраслях промышленности.
Двигатель конструктивно прост. Габаритные размеры могут быть от нескольких десятков миллиметров до размеров мощных стационарных установок. Содержит небольшое количество деталей. Технология изготовления не сложна. Допустимо серийное отечественное оборудование. Возможно применение новых материалов. Модульное исполнение позволяет легко создавать необходимые конфигурации. Волновой характер процессов воспламенения и горения легко управляем. Возможность полного сгорания топлива и расширение его за время нескольких оборотов вала способствует повышению экономичности. Два автономных потока повышают надежность. Простота конструкции предполагает снижение затрат на создание, изготовление и эксплуатацию. Полное сжигание топлива, а также, влияющее на звуковые параметры, выбрасывание в противофазе сопряженных газовых потоков, позволяет говорить и о положительном экологическом эффекте.
Роторно-лопастной двигатель внутреннего сгорания
Валерий Васильев, фото автора
За историю автомобилестроения лучшие умы человечества придумали немало самых разнообразных конструкций двигателей. Но только некоторым из них удалось стать серийными образцами. Остальные, несмотря на оригинальность заложенных идей, так и не вышли из стадии эксперимента. Возможно, судьба роторно-лопастного мотора, созданного в Псковском государственном политехническом университете, окажется более удачливой.
Расклад сил
Развитие и область применения двигателей внутреннего сгорания (ДВС) приобрели сегодня всеобъемлющий характер. Многочисленные научные исследования и разработки превратили ДВС в сложнейшую, но надежную и универсальную систему. В то же время опыт длительной эксплуатации в составе транспортных средств выявил недостатки, которые практически невозможно исключить путем модернизации конструкции двигателя, не затронув базовых принципов его организации, таких как механические потери на трение и процесс внутреннего сгорания топлива.
Главным недостатком ДВС, который в результате массового распространения автомобильного транспорта занял лидирующее положение, стал фактор загрязнения окружающей среды выхлопными газами. Доля вредных веществ, поступающих в атмосферу с отработавшими газами автомобильных двигателей, составляет до 63% от общего загрязнения окружающей среды. В связи с этим в последние десятилетия в мире ужесточаются требования к экологическим нормам для транспортных средств, и в первую очередь это касается двигателей внутреннего сгорания. Последние, потребляя пятую часть первичных энергоносителей, являются основным источником загрязнения окружающей среды. Однако планируемые меры, даже в случае их полной реализации, способны лишь снизить темпы увеличения загрязняющего действия ДВС транспортных средств на фоне быстрого роста их количества и мощности.
| Тип двигателя | Токсичность, мг/(л. с..с) с..с) | ||
|---|---|---|---|
| NOx | CO | CxHy | |
| Карбюраторный двигатель | 0,6–2,0 | 40–100 | 15–120 |
| Дизель | 0,4–2,0 | 0,2–5,0 | 0,6–12 |
| Газовая турбина | 0,7–2,0 | 2,0–3,6 | 0,012–0,07 |
| Двигатель внешнего сгорания | 0,1–0,2 | 0,05–0,2 | 0,0015–0,009 |
| Нормы Euro 5 | 0,414 | 0,311 | 0,095 |
Таким образом, назрела необходимость производства принципиально иного двигателя, способного кардинально изменить ситуацию, работающего на различных видах топлива и не имеющего вредных выбросов в атмосферу.
По критерию экологичности использования любого вида топлива наилучшие характеристики у двигателя с внешним подводом тепла (ДВПТ), реализующего цикл Стирлинга. Внешний подвод тепла позволяет применять различные тепловые источники без каких-либо существенных изменений конструкции двигателя. В подобных двигателях могут быть использованы практически все виды ископаемого топлива – от твердых до газообразных. Для оценки уровня токсичности двигателя с внешним подводом тепла его удельные выделения токсичных веществ можно сравнить с таковыми у дизеля, газовой турбины и карбюраторного двигателя. По таким показателям вредных веществ, как CO, NOx и CxNy, мотор с внешним подводом тепла выглядит не только значительно лучше перечисленных конкурентов, но и соответствует перспективным экологическим нормам, еще не введенным в действие.
В подобных двигателях могут быть использованы практически все виды ископаемого топлива – от твердых до газообразных. Для оценки уровня токсичности двигателя с внешним подводом тепла его удельные выделения токсичных веществ можно сравнить с таковыми у дизеля, газовой турбины и карбюраторного двигателя. По таким показателям вредных веществ, как CO, NOx и CxNy, мотор с внешним подводом тепла выглядит не только значительно лучше перечисленных конкурентов, но и соответствует перспективным экологическим нормам, еще не введенным в действие.
Итак, преимущества двигателей с внешним подводом тепла выражаются в термическом КПД, достигающем 60%, использовании практически всех видов топлива, включая солнечную энергию, возможности регулирования мощности путем изменения давления рабочего тела и температуры, легком пуске при низкой температуре, герметичности, высоком моторесурсе.
Исходя из этого можно сказать, что в сфере создания двигателей возникло техническое противоречие: с одной стороны, имеются компактные и дешевые двигатели внутреннего сгорания, а с другой – массивные и дорогие в изготовлении моторы с внешним подводом теплоты.
Давайте рассмотрим недостатки поршневого двигателя Стирлинга. Во-первых, это сложность конструктивного исполнения отдельных узлов, проблемы в области уплотнений, регулирования мощности и т. д. Особенности технического решения обусловливаются применяемыми рабочими телами. Так, например, гелий обладает сверхтекучестью, что определяет повышенные требования к уплотняющим элементам рабочих поршней, штока вытеснителя и т. д. Во-вторых, формирование облика перспективных, предполагаемых к производству машин Стирлинга невозможно без разработки новых технических решений основных узлов. В-третьих, высокий уровень технологии производства.
Кроме того, данная проблема связана с необходимостью применения в машинах Стирлинга жаростойких сплавов и цветных металлов, их сварки и пайки. Отдельный вопрос – изготовление регенератора и насадки для него для обеспечения, с одной стороны, высокой теплоемкости, а с другой – низкого гидравлического сопротивления. Все это требует высокой квалификации рабочего персонала и современного технологического оборудования. Зарубежный опыт создания современных высокоэффективных машин Стирлинга показывает, что без точного математического моделирования рабочих процессов и оптимального проектирования основных узлов доводка таких машин превращается в многолетние изнурительные экспериментальные исследования.
Зарубежный опыт создания современных высокоэффективных машин Стирлинга показывает, что без точного математического моделирования рабочих процессов и оптимального проектирования основных узлов доводка таких машин превращается в многолетние изнурительные экспериментальные исследования.
Свой путь
Взвесив все «за» и «против», в Псковском государственном политехническом университете (ППИ) подумали, почему бы не создать новый тип двигателя, соединяющего в себе преимущества роторно-лопастной расширительной машины и принципа внешнего подвода теплоты.
Кстати, работы по созданию роторно-лопастного двигателя ведутся в ППИ уже более 30 лет. За это время создан коллектив из высококвалифицированных научных сотрудников, накоплены значительный опыт и научно-технический материал. Результатом исследований стало создание натурного образца роторно-лопастной расширительной машины на основе рычажно-кулачкового преобразователя движения.
В практическое русло работы вошли в 1998 году, когда в рамках федеральной целевой программы ППИ заключил договор с Миннауки на опытно-конструкторские работы на тему: «Разработка технологии и изготовление опытного образца роторно-лопастного двигателя внутреннего сгорания». Итогом работы стало создание технологии изготовления и макета РЛД внутреннего сгорания.
Итогом работы стало создание технологии изготовления и макета РЛД внутреннего сгорания.
Исследование данных макетов позволило доказать принцип работы роторно-лопастной машины, отработать конструкцию рычажно-кулачкового механизма, утвердиться в надежности и долговечности работы РЛД и подтвердить достоинства роторно-лопастных машин.
Принцип работы роторно-лопастного двигателя известен уже давно. Этот механизм содержит два ротора с лопастями и цилиндр с впускными и выпускными окнами. В двигателе предусмотрен механизм связи, позволяющий роторам совершать движение друг относительно друга и вращательно-колебательное движение относительно цилиндра, а также устройство, позволяющее суммировать движение роторов и передать равномерное вращение выходному валу.
При этом выяснилось, что коэффициент компактности основного объема роторно-лопастного двигателя (отношение эквивалентного рабочего объема к объему двигателя) достигает 15–20%, в то время как максимальное значение этого показателя для поршневых (V-образных с кривошипно-шатунным механизмом) составляет 1–2%.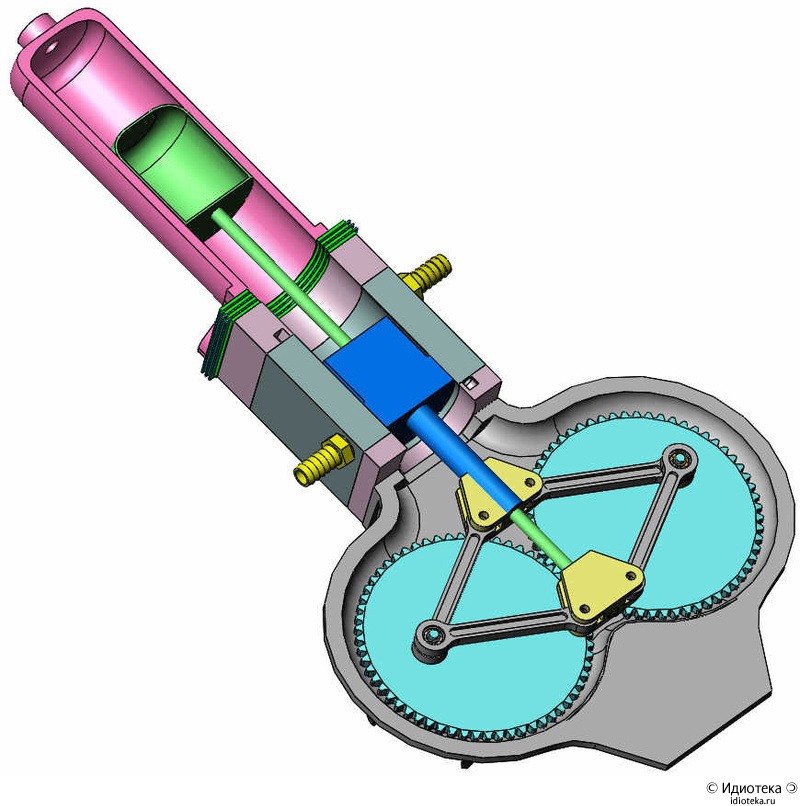 Столь большое (в несколько раз) преимущество по удельно-массовым показателям открывает перспективы практического применения двигателей данной схемы.
Столь большое (в несколько раз) преимущество по удельно-массовым показателям открывает перспективы практического применения двигателей данной схемы.
Предложенная конструктивная схема роторно-лопастного двигателя имеет ряд преимуществ по сравнению с шатунно-поршневым двигателем. На основании проведенных ранее исследований, выявления проблем в области создания двигателей с внешним подводом теплоты, требованиям к современным моторам возникла идея объединить роторно-лопастную конструкцию двигателя с принципом внешнего подвода теплоты. Данный синтез явился следствием тщательного анализа современных конструктивных вариантов двигателей с выявлением достоинств и недостатков каждого.
В настоящее время существует три основные проблемы в области создания роторно-лопастных машин. В основе конструкции предложенной расширительной машины и двигателя внутреннего сгорания лежит четырехзвенный механизм преобразования движения, особенность конструкции которого заключается в следущем: механизм состоит из четырехзвенника и кулачка. Четырехзвенник состоит из шарнирно связанных плеч одинаковой длины. К серединам плеч шарнирно прикреплены рычаги лопастей. Механизм обеспечивает основные функциональные требования к преобразователю движения. Закон изменения угла между лопастями синусоидальный. Графики скоростей и ускорений лишены резких скачков, поэтому достигается плавность и безударность работы механизма. В конструкции нет недостатков, связанных с использованием зубчатых колес. В свою очередь простота изготовления определяется отсутствием сложных прецизионных деталей, сферических шарниров и т. п., применением однотипных элементов. К тому же механизм реверсивен, обратим, уравновешен, что расширяет функциональные возможности двигателя, спроектированного на его основе.
Четырехзвенник состоит из шарнирно связанных плеч одинаковой длины. К серединам плеч шарнирно прикреплены рычаги лопастей. Механизм обеспечивает основные функциональные требования к преобразователю движения. Закон изменения угла между лопастями синусоидальный. Графики скоростей и ускорений лишены резких скачков, поэтому достигается плавность и безударность работы механизма. В конструкции нет недостатков, связанных с использованием зубчатых колес. В свою очередь простота изготовления определяется отсутствием сложных прецизионных деталей, сферических шарниров и т. п., применением однотипных элементов. К тому же механизм реверсивен, обратим, уравновешен, что расширяет функциональные возможности двигателя, спроектированного на его основе.
Число рабочих тактов при одном обороте выходного вала равно четырем, в то время как для шатунно-поршневого ДВС оно равно двум. Равенство продолжительности рабочих тактов на одном обороте выходного вала обеспечивается симметричной конструкцией механизма преобразования. Степень сжатия рабочего тела зависит от диапазона изменения угла между лопастями. Для данного механизма она ограничивается лишь конструктивными и прочностными параметрами реального механизма.
Степень сжатия рабочего тела зависит от диапазона изменения угла между лопастями. Для данного механизма она ограничивается лишь конструктивными и прочностными параметрами реального механизма.
Отличия и преимущества
В 2007 г. ППИ выиграл конкурс в рамках федеральной целевой программы и заключил государственный контракт с Федеральным агентством по науке и инновациям на проведение научно-исследовательских работ на тему «Разработка математической модели протекания термодинамического цикла с внешним подводом теплоты, позволяющей создать экологически чистый двигатель роторно-лопастного типа».
В итоге появилась методика расчета и проектирования РЛД с внешним подводом теплоты (РЛДВПТ), в частности, созданы математические модели отдельных узлов двигателя, а также математическая модель, подтверждающая возможность реализации термодинамического цикла с внешним подводом теплоты в РЛД. Для проведения экспериментальных исследований были созданы и исследованы макет механизма преобразователя движения и макет камеры сгорания. Полученные результаты явились доказательной базой правильности теоретических расчетов.
Полученные результаты явились доказательной базой правильности теоретических расчетов.
| Показатели | РЛД | ШПД |
|---|---|---|
| Удельная масса, кг/кВт | 0,4–0,8 | 2,5–4,5 |
| Удельная мощность, кВт/л | 200 | 50–80 |
| Минимальная скорость вращения, мин-1 | 60 | 600–800 |
| Потери на механическое трение, % | 10 | 35 |
| Средняя скорость лопастной (поршневой) группы, м/с | 30–50 | 15–25 |
| Амплитуда вибраций (в подвешенном состоянии), мкм | 100 | 3000 |
Как следствие исследования механических и термодинамических процессов двигателя подтвердили возможность и перспективность создания нового типа двигателя – РЛДВПТ (роторно-лопастной двигатель с внешним подводом тепла).
Для практического осуществления цикла с внешним подводом теплоты в двигателе, имеющем замкнутое рабочее пространство, необходимы циклическое изменение объема рабочего пространства, подвод теплоты к рабочему телу, отвод теплоты от него и регенерация некоторой части тепла. Реализовать условия осуществления термодинамического цикла с внешним подводом теплоты на базе двигателя роторно-лопастного типа возможно несколькими способами, для осуществления которых используются соответствующие конструктивные решения.
| Показатели | 4S1210 «Дженерал Моторс» (экспери-ментальные данные) | 4L23 «Дженерал Моторс» (расчетные данные) | Рядный «Филипс» (расчетные данные) | РЛДВПТ (расчетные данные) |
|---|---|---|---|---|
| Мощность, кВт | 280 | 95 | 147 | 300 |
| Частота вращения, мин-1 | 1500 | 2100 | 3000 | 1500 |
| КПД, % | 35 | – | – | 22,6 |
| Температура нагревателя, °С | 650 | 760 | 700 | 427 |
| Температура охладителя, °С | 32 | 57 | 40 | 77 |
| Рабочее тело | H2 | H2 | He | СО2 |
| Среднее давление, МПа | 10,35 | 10,3 | 21,6 | 3,1 |
| Количество цилиндров | 4 | 4 | 4 | 2 |
| Объем цилиндра, cм3 | 2270 | 1510 | 400 | 1000 |
| Удельная мощность, Вт/ cм3 | 58 | 15,7 | 136 | 150 |
| Масса, кг | 2270 | 725 | 400 | 500 |
| Габаритные размеры, мм | 1880x1016x x1930 | 1360x600x x1000 | 1130x440x x963 | 1200x600x x900 |
| Объемная мощность, кВТ/м3 | 76 | 116,4 | 308 | 464 |
| Удельная масса, кг/кВТ | 8 | 7,6 | 2,72 | 1,66 |
Конструктивно двигатель состоит из двух модулей, каждый из которых включает лопастную группу и механизм преобразования движения. Модули жестко соединены между собой и повернуты друг относительно друга на 45°. В конструкции для нагревания и охлаждения рабочего тела предусмотрены нагреватель и охладитель.
Модули жестко соединены между собой и повернуты друг относительно друга на 45°. В конструкции для нагревания и охлаждения рабочего тела предусмотрены нагреватель и охладитель.
- рабочее тело в отличие от поршневого Стирлинга может иметь большую молярную массу по сравнению с гелием и водородом, что приводит к уменьшению среднего давления рабочего тела и применению общедоступных уплотнений;
- температура рабочего тела в нагревателе благодаря круговой циркуляции ниже, чем у обычных Стирлингов, что дает возможность применять недорогие по стоимости стали и сплавы;
- применение конструктивной схемы роторно-лопастной машины позволяет снизить удельную массу двигателя.
Область применения
По данному принципу можно создать целое семейство двигателей различной мощности. Сейчас отрабатывается конструкция мотора мощностью до 300 кВт. Область применения роторно-лопастных двигателей с внешним подводом тепла достаточна велика. Они могут использоваться везде, где работают ДВС, в том числе и на автомобильном транспорте. РЛДВПТ способны функционировать в условиях, где ДВС не работают, а именно: в воде, под землей, в космосе, в условиях песчаных бурь. При изменении конструкции механизма преобразования движения роторно-лопастная машина работает как пневмодвигатель либо гидродвигатель, как расширительная (паровая) машина или дроссель в магистральных газопроводах для понижения давления с целью получения электричества. РЛДВПТ могут работать с такими источниками энергии, как компрессор; жидкостный, тепловой, вакуумный насосы, а также холодильная машина.
РЛДВПТ способны функционировать в условиях, где ДВС не работают, а именно: в воде, под землей, в космосе, в условиях песчаных бурь. При изменении конструкции механизма преобразования движения роторно-лопастная машина работает как пневмодвигатель либо гидродвигатель, как расширительная (паровая) машина или дроссель в магистральных газопроводах для понижения давления с целью получения электричества. РЛДВПТ могут работать с такими источниками энергии, как компрессор; жидкостный, тепловой, вакуумный насосы, а также холодильная машина.
Cпециалисты Псковского государственного политехнического университета продолжают совершенствовать свое детище, и, возможно, очень скоро оно станет настоящей альтернативой традиционным конструкциям двигателей.
Автор благодарит М.А. Донченко за помощь в подготовке статьи
Please enable JavaScript to view the comments powered by Disqus.
13.3. Волновой электродвигатель с внутренним статором
Волновые
электродвигатели осуществляют вращение
ротора с пониженной скоростью под
действием магнитного поля, создаваемого
обмоткой статора.
Решим
задачи повышения технологичности при
изготовлении, упрощения конструкции и
повышения электромагнитного момента
волнового электродвигателя (регистрационный
номер заявки 2292107).
Волновой
электродвигатель с внутренним статором
(см. рис. 13.4) состоит из цилиндрического
сердечника статора 1 и ротора 5, выполненного
в виде полого цилиндра, охватывающего
сердечник статора 1 по наружной поверхности
6, и гибкого магниточувствительного
элемента 7, расположенного между
сердечником статора 1 и ротором 5. Каждая
секция обмотки состоит из пары
противоположно размещенных обмоток,
каждая из которых размещена в двух
смежных пазах сердечника статора.
Рис.
13.4. Поперечное сечение волнового
электродвигателя
с
внутренним статором
Гибкий
магниточувствительный элемент 7 выполнен
с возможностью изгибания в радиальном
направлении без изменения своей длины.
Наружная
поверхность 14 магниточувствительного
элемента 7 и внутренняя поверхность 13
полого ротора 5 выполнены с большим
коэффициентом трения.
В
частности, наружная поверхность 14
магниточувствительного элемента 7 и
внутренняя поверхность 13 полого ротора
5 выполнены рифлеными с насечкам (не
показаны).
В
наружных пазах статора уложена трехфазная
обмотка, состоящая из секций 2, 3 и 4.
На
рис. 13.5 показано поперечное сечение
волнового электродвигателя, у которого
запитанные током секции обмотки статора
отмечены темным тоном. Стрелками показано
направление вращения магнитного поля
статора при переключении секций обмотки
и направление вращения ротора.
Рис.
13.5. Поперечное сечение волнового
электродвигателя
с
внутренним статором и запитанными
обмотками статора
Гибкий
магниточувствительный элемент 7
контактирует без проскальзывания с
полым ротором 5 и с наружной поверхностью
6 сердечника статора 1, причем между
участками 8 и 9 магниточувствительного
элемента 7 и сердечника статора 1, а также
между участками 10 и 11 элемента 7 и ротором
5 имеется зазор 12.
Контактирующие
с наружной поверхностью 6 сердечника
статора 1 участки 10 и 11 магниточувствительного
элемента 7 расположены между контактирующими
с внутренней поверхностью 13 ротора 5
участками 8 и 9 магниточувствительного
элемента 7.
Волновой
электродвигатель работает следующим
образом.
Осуществляется
последовательная запитка током секций
2, 3 и 4 трехфазной обмотки статора.
Вследствие этого происходит последовательное
изгибание магниточувствительного
элемента 7 в радиальном направлении с
притяжением одних его участков к
сердечнику статора 1 и прижиманием
других его участков к внутренней
поверхности ротора с передачей на него
электромагнитного момента.
Так,
при запитке секций 3 и 4 обмотки статора
током происходит притяжение участков
10 и 11 магниточувствительного элемента
7 к наружной поверхности 6 сердечника
статора 1. Поскольку элемент 7 выполнен
с возможностью изгибания в радиальном
направлении без изменения своей длины,
то участки 8 и 9 магниточувствительного
элемента 7 прижимаются к внутренней
поверхности 13 полого ротора 5. При этом
При этом
между участками 10 и 11 магниточувствительного
элемента 7 и внутренней поверхностью
13 полого ротора 5, а также между участками
8 и 9 элемента 7 и наружной поверхностью
6 сердечника статора 1 образуется зазор
12.
Поскольку
между контактирующими участками
магниточувствительного элемента с
внутренней поверхностью ротора и
наружной поверхностью сердечника
статора отсутствует проскальзывание,
а наружная поверхность элемента 7 и
внутренняя поверхность полого ротора
5 выполнены с большим коэффициентом
трения, то происходит передача
электромагнитного момента от элемента
7 к ротору при последовательной запитке
током секций 2, 3 и 4 трехфазной обмотки
статора.
При
последовательном переключении секций
2, 3, 4 обмотки статора создается вращающееся
с частотой ωс
магнитное поле. При этом формируется
волна изгибания магниточувствительного
элемента, вследствие чего обеспечивается
вращение ротора с частотой ωр
значительно ниже частоты вращения
магнитного поля в направлении, показанном
стрелкой.
Предлагаемый
волновой электродвигатель с внутренним
статором технологичен в изготовлении,
обладает простой и надежной конструкцией
сердечника статора и ротора, характеризуется
легкостью соединения внешней поверхности
ротора с приводимым в действие механизмом,
обеспечивая передачу значительного
электромагнитного момента на ротор.
Расположение
полого ротора снаружи магниточувствительного
элемента позволяет:
устранить
зазор между этим элементом и наружной
поверхностью сердечника статора, что
приводит к увеличению силы притяжения
между ними при питании обмотки током,
а значит, и к увеличению электромагнитного
момента двигателя;выполнить
ротор из любого электротехнического
материала – магнитного или немагнитного;выполнить
ротор со значительной толщиной стенок;
толстостенный ротор позволяет передавать
значительный электромагнитный момент
без механических деформаций;присоединять
к наружной поверхности ротора нагрузку,
например шкив приводного устройства.

О компании — Wave Engine Corp. управления для разработки авиационной силовой установки будущего. Наша компания, базирующаяся в районе метро Балтимор-Вашингтон, представляет собой целевую группу ученых, инженеров, слесарей и бывших руководителей аэрокосмической и оборонной промышленности из списка Fortune 500, которая работает над тем, чтобы обеспечить следующий ренессанс в аэрокосмической отрасли.
Дааниш Макбул
Главный исполнительный директор
Д-р Макбул является генеральным директором Wave Engine Corp., руководя техническими и корпоративными усилиями с момента основания компании. Он обладает более чем десятилетним опытом разработки силовых и двигательных систем в Университете Мэриленда и Массачусетском технологическом институте. Доктор Макбул имеет докторскую степень. получил степень бакалавра аэрокосмической техники в Университете Мэриленда.
Эндрю Гелтман
Вице-президент по производству
Г-н Гелтман занимает должность вице-президента по эксплуатации Wave Engine Corp. и отвечает за административную, финансовую и юридическую деятельность. До своей нынешней должности г-н Гельтман был научным сотрудником по связям с государственными органами в Merck и Cubist Pharmaceuticals, отвечая за участие правительства, государственную политику и вопросы интеллектуальной собственности. Г-н Гелтман имеет степень доктора права юридического факультета Мэрилендского университета.
и отвечает за административную, финансовую и юридическую деятельность. До своей нынешней должности г-н Гельтман был научным сотрудником по связям с государственными органами в Merck и Cubist Pharmaceuticals, отвечая за участие правительства, государственную политику и вопросы интеллектуальной собственности. Г-н Гелтман имеет степень доктора права юридического факультета Мэрилендского университета.
Bert VanDerHeiden
Главный операционный директор
Д-р VanDerHeiden является главным операционным директором Wave Engine Corp. Он обладает более чем тридцатилетним техническим и руководящим опытом в аэрокосмической и оборонной промышленности. Совсем недавно он был вице-президентом по военному и пусковому сегменту в Northrop Grumman, где курировал портфель проектов стоимостью 600 миллионов долларов, включающий 50 программ, включая программы F-35, F-22 и THAAD. Доктор ВандерХейден имеет докторскую степень. по физике из Университета Юты.
Уэйн Кеннард
Главный юрисконсульт
Г-н Кеннард является главным юрисконсультом корпорации Wave Engine, где он управляет юридическими вопросами компании и портфелем интеллектуальной собственности. До своей нынешней должности он был старшим партнером в WilmerHale, где специализировался на представлении интересов высокотехнологичных компаний по широкому кругу вопросов корпоративного права, интеллектуальной собственности и лицензирования. Г-н Кеннард имеет степень доктора права юридического факультета Университета Джорджа Вашингтона.
До своей нынешней должности он был старшим партнером в WilmerHale, где специализировался на представлении интересов высокотехнологичных компаний по широкому кругу вопросов корпоративного права, интеллектуальной собственности и лицензирования. Г-н Кеннард имеет степень доктора права юридического факультета Университета Джорджа Вашингтона.
Гэри Замероски
Вице-президент по развитию бизнеса и директору по стратегии
Г-н Замероски является вице-президентом по развитию бизнеса и директором по стратегии в Wave Engine Corp., где он управляет бизнес-стратегией, связями с общественностью и партнерскими усилиями. Он занимал руководящие должности в GE Aviation, Textron, Airbus и совсем недавно в Honeywell Aerospace, где руководил стратегическим бизнес-подразделением стоимостью 6 млрд долларов США по стратегии, инновациям и маркетингу. Г-н Замероски является аэрокосмическим инженером, летчиком и имеет ученые степени Американского и Джорджтаунского университетов в Вашингтоне, округ Колумбия.
Дааниш Макбул
Генеральный директор Wave Engine Corp.
Доктор Макбул руководил техническими и корпоративными усилиями Wave Engine Corp. с момента основания компании. Он обладает более чем десятилетним опытом разработки силовых и двигательных систем в Университете Мэриленда и Массачусетском технологическом институте.
Эйлин О’Рурк
Финансовый директор Фонда Абелл (наблюдатель)
Г-жа О’Рурк является финансовым директором Фонда Абелл. Она управляет финансовыми операциями Фонда и влияет на инвестиционный портфель инновационных технологий. Она занимала руководящие должности в компаниях KPMG и Legg-Mason, Inc. и обладает более чем тридцатилетним опытом работы в сфере финансов и управления бизнесом.
Берт ВанДерХайден
Главный операционный директор Wave Engine Corp. и бывший вице-президент Northrop Grumman
Доктор ВанДерХайден обладает более чем тридцатилетним техническим и руководящим опытом в аэрокосмической и оборонной промышленности. Совсем недавно он был вице-президентом по военному и пусковому сегменту в Northrop Grumman, где курировал портфель проектов стоимостью 600 миллионов долларов, включающий 50 программ, включая программы F-35, F-22 и THAAD.
Совсем недавно он был вице-президентом по военному и пусковому сегменту в Northrop Grumman, где курировал портфель проектов стоимостью 600 миллионов долларов, включающий 50 программ, включая программы F-35, F-22 и THAAD.
Патрик Дагган
Управляющий директор, Gula Tech Adventures
Полковник (справа) Патрик Дагган — управляющий директор Gula Tech Adventures, где он имеет более чем 25-летний опыт работы в коммерческом, государственном и оборонном секторах. Пэт — зеленый берет на пенсии, успешный руководитель в области технологий и бывший директор Совета национальной безопасности в Белом доме.
Гур Кимчи
Бывший вице-президент Amazon Prime Air
Г-н Кимчи стал соучредителем Prime Air, автономной платформы воздушной логистики Amazon, и руководил Amazon Prime Air, пройдя сертификацию FAA Part 135 Air-Carrier. Он также был одним из основателей Консультативного комитета FAA по дронам, занимал руководящие должности в Microsoft и VocalTec и был членом совета директоров Waze до ее приобретения Google.
Первый полномасштабный прототип двигателей разработан и испытан в Университете Мэриленда.
Усовершенствования в области разработки и тестирования с использованием специализированного испытательного стенда и поддержки со стороны Корпорации развития технологий штата Мэриленд (TEDCO).
Корпорация Wave Engine собирает 1,45 миллиона долларов в рамках посевного раунда с участием Maryland Momentum Fund, Abell Foundation и Gula Tech Adventures.
Корпорация Wave Engine получает от Агентства перспективных исследовательских проектов Министерства обороны (DARPA) грант в размере 2,85 млн долларов на продолжение разработки двигателей для высокопроизводительных БПЛА.
Первый пилотируемый самолет с двигательной установкой Wave Engine Corp. поднимается в воздух, что означает значительный скачок в технологической готовности.
Корпорация Wave Engine заключила контракт с ВВС США на начало разработки первого транспортного средства Wave Engine Corp., универсальной платформы воздушного базирования (VALP).
Ссылка для загрузки страницы Перейти к началу
Профиль компании Wave Engine: Оценка и инвесторы
Обзор волнового двигателя
- Основан
2016
- Статус
Частный
- Сотрудники
6
- Тип последней сделки
Семена
- Сумма последней сделки
3,89 млн долларов
- Инвесторы
11
Временная шкала Wave Engine
2019202020212022
Финансирование RoundCaptured Количество сотрудников Расчетный рост сотрудников
Хотите получить подробную информацию о компаниях 3M+?
То, что вы здесь видите, царапает поверхность
Запросить бесплатную пробную версию
Хотите покопаться в этом профиле?
Мы поможем вам найти то, что вам нужно
Узнать больше
Оценка и финансирование Wave Engine
| Тип сделки | Дата | Сумма | Поднят до даты | Пост-Вал | Статус | Сцена |
|---|---|---|---|---|---|---|
7. Семенной раунд Семенной раунд | 15 июня 2022 г. | 3,89 млн долларов | 00.000 | 000,00 | Завершено | Получение дохода |
| 6. Вторичная транзакция — частная | 01 марта 2022 | 00.000 | Завершено | Получение дохода | ||
| 5. Грант | 01 января 2021 | 000000 | 00.000 | Завершено | Получение дохода | |
| 4. Грант | 01 января 2020 | 00.000 | 00.000 | Завершено | Получение дохода | |
| 3. Грант | 01 января 2019 | 00000 | 00.000 | Завершено | Получение дохода | |
| 2. Ранняя стадия VC | 04 апреля 2018 | 1,45 млн долларов | 1,45 млн долларов | Завершено | Получение дохода | |
1. Ранняя стадия VC Ранняя стадия VC | 05 октября 2016 г. | Завершено | Запуск |
Чтобы просмотреть полную историю оценки и финансирования Wave Engine, запросите доступ »
Столик крышки волнового двигателя
| Наличие | Количество акций Разрешено | Номинальная стоимость | Ставка дивидендов (%) | Оригинал Цена выпуска | Ликвидация | Ликвидация Преф. Несколько | Цена конвертации | % принадлежит |
|---|---|---|---|---|---|---|---|---|
| Семена | 0 000 000 | 00.000000 | 00.00 | 00.00 | 00 | 00.00 | 00.00 | |
| Семя-2 | 0 000 000 | 00.000000 | 00.00 | 00.00 | 00 | 00.00 | 00. 000 000 | |
| Семена-1 | 52 413 | $0,000100 | 1,5 $ | 1,5 $ | 1x | 1,5 $ | 0,71% |
Чтобы просмотреть полную историю таблицы капиталовложений Wave Engine, запросите доступ »
Патенты волнового двигателя
22
Всего документов
Заявки и гранты000
Всего патентов
Семьи3
Предоставленный
1
В ожидании
000
истекает
в следующие 12 мес.
Недавняя патентная активность Wave Engine
| Идентификатор публикации | Название патента | Статус | Дата первой подачи | Технология (КПК) | Цитаты |
|---|---|---|---|---|---|
| США-20200003158-А1 | Повышение производительности импульсной камеры сгорания при скорости полета | Неактивен | 28 июня 2018 г. | 00000000 | |
| США-20210108590-А1 | Способ и устройство для запуска и управления импульсными камерами сгорания с использованием селективной форсунки | В ожидании | 17 апреля 2018 г. | 00000000 | |
| EP-3781868-A1 | Способ и устройство для запуска и управления импульсными камерами сгорания с использованием селективной форсунки | В ожидании | 17 апреля 2018 г. | 00000000 | |
| США-20200256260-А1 | Способ и устройство для запуска и управления импульсными камерами сгорания с использованием селективной форсунки | В ожидании | 17 апреля 2018 г. | 00000000 | |
| СА-3097592-А1 | Способ и устройство для запуска и управления импульсными камерами сгорания с использованием селективной форсунки | В ожидании | 17 апреля 2018 г. | Ф23Р7/00 |
Чтобы просмотреть полную историю патентов Wave Engine, запросите доступ »
Группа руководителей Wave Engine (4)
| Имя | Название | Сиденье за столом | Контактная информация |
|---|---|---|---|
| Дааниш Макбул, доктор философии | Главный исполнительный директор и член правления | ||
| Берт Вандерхайден, доктор философии | Главный операционный директор и член правления | ||
| Гэри Замероски | Директор по стратегии и вице-президент по развитию бизнеса |
Вы просматриваете 3 из 4 членов исполнительной команды. Получить полный список »
Получить полный список »
Члены правления Wave Engine (6)
| Имя | Представляющий | Роль | С |
|---|---|---|---|
| Берт Вандерхайден, доктор философии | Волновой двигатель | Главный операционный директор и член правления | 000 0000 |
| Дааниш Макбул, доктор философии | Волновой двигатель | Главный исполнительный директор и член правления | 000 0000 |
| Эйлин О’Рурк | Фонд Абелла | Член правления | 000 0000 |
| Майкл Колфилд | Сам | Член правления | 000 0000 |
| Патрик Дагган | Сам | Член правления | 000 0000 |
Вы просматриваете 5 из 6 членов правления. Получить полный список »
Получить полный список »
Инвесторы Wave Engine (11)
| Имя инвестора | Тип инвестора | Холдинг | Инвестор с | Раунды с участием | Контактная информация |
|---|---|---|---|---|---|
| Агентство перспективных оборонных исследовательских проектов | Правительство | 000 0000 | 000000 0 | ||
| ВВС США | Правительство | 000 0000 | 000000 0 | ||
| Министерство обороны США | Правительство | 000 0000 | 000000 0 | ||
| Синди Гула | Ангел (индивидуальный) | Меньшинство | 000 0000 | 000000 0 | |
| Технологические приключения Гула | Венчурный капитал | Меньшинство | 000 0000 | 000000 0 |
Вы просматриваете 5 из 11 инвесторов. Получить полный список »
Получить полный список »
Готовы начать?
Запросить бесплатную пробную версию
ГИДРОС | HYDROS WaveEngine — ВМЕСТЕ используйте насосы разных производителей
ГИДРОС |
HYDROS WaveEngine — ВМЕСТЕ используйте насосы разных производителей
HYDROS WaveEngine — ВМЕСТЕ используйте насосы разных производителей
Широкая совместимость
Управление насосами самых популярных производителей для хобби.
Теперь вы можете использовать EcoTech Marine VorTech™ на одном конце вашего аквариума и Reef Octopus OCTO Pulse на другом, и тогда насосы будут работать одновременно друг против друга или что-то совершенно другое. Лучше всего то, что вы не ограничены двумя насосами! Добавьте в смесь Maxspect Gyre, если хотите!
Совместимые насосы »
Три способа управления
Все насосы разные, поэтому есть несколько способов управления ими.
ПРЯМОЙ ПРИВОД
Избавьтесь от помех
Многие насосы можно подключить непосредственно к WaveEngine, что устраняет необходимость не только во внешнем контроллере насоса, но и в блоке питания. Вот так! WaveEngine может одновременно питать до 4 насосов. Представьте себе весь беспорядок, который вы можете убрать со своего стенда!
Вот так! WaveEngine может одновременно питать до 4 насосов. Представьте себе весь беспорядок, который вы можете убрать со своего стенда!
Все, что вам нужно для прямого подключения таких насосов, как Maxspect Gyre, IceCap Gyre, Reef Octopus OCTO Pulse и будущего насоса Blade, — это шнуры адаптера прямого привода HYDROS, которые стоят 12,99 долларов США за штуку.
0–10 В УПРАВЛЕНИЕ
Многие популярные помпы таких брендов, как Tunze, Abyzz и Reef Octopus, имеют внешние контроллеры, оснащенные портом 0–10 В, что позволяет подключать их к контроллеру стороннего производителя. Вам просто понадобится четырехъядерный адаптер HYDROS 0–10 В, чтобы подключить помпу, и вуаля! Теперь вы можете воспользоваться всеми собственными режимами потока и предустановками, предлагаемыми помпой, без какого-либо сложного программирования.
Подробнее »
БЕСПРОВОДНОЕ УПРАВЛЕНИЕ
EcoTech Marine Насосы VorTech™ могут управляться беспроводным способом с помощью WaveEngine. Для этого вам сначала необходимо приобрести соответствующую модель WaveEngine с установленной беспроводной картой EcoTech Marine.
Для этого вам сначала необходимо приобрести соответствующую модель WaveEngine с установленной беспроводной картой EcoTech Marine.
Эта версия WaveEngine стоит на 50 долларов больше, чем стандартная версия, но это хорошее вложение денег, если вы хотите управлять всеми своими помпами разных марок с помощью одного приложения. Способ управления насосами EcoTech Marine, такими как VorTech, заключается в использовании их беспроводного ведомого режима. Теперь вы можете использовать свои помпы VorTech вместе с другими помпами, которые у вас есть!
Одно приложение для ВСЕХ
Вам больше не нужны несколько приложений или ручные контроллеры.
Приложение HYDROS полностью устраняет потребность в отдельных приложениях для насосов и ручных контроллерах. WaveEngine может подключиться к собственной платформе управления каждой помпы, чтобы получить доступ ко всем предустановленным схемам и режимам потока, или вы можете создать свои собственные!
Посмотрите, что вы можете сделать »
- Вы можете указать расположение насосов в вашем аквариуме.
- Вы можете указать минимальную и максимальную скорость насоса для ваших насосов.
- Вы можете объединять помпы в группы и создавать разные правила и расписания для каждой группы.
- Вы можете заставить насосы разных производителей работать вместе, используя предустановленные схемы потока, такие как синхронизация, антисинхронизация, треугольная волна, прямоугольная волна, синусоидальная волна, круговой, случайный, постоянный и другие.
- Вы можете создавать различные режимы работы, такие как режим кормления, режим подмены воды и ночной режим.
- Вы можете создавать собственные схемы потока любой продолжительности до 24 часов с точностью до 1/1000 секунды.

Поехали »
Мониторинг в режиме реального времени
Удаленно проверяйте состояние помпы и получайте оповещения в случае возникновения проблем.
Вы можете не только управлять насосами из любого места, но и контролировать их работу! WaveEngine отслеживает множество полезных данных, которые вы можете использовать для обеспечения оптимальной работы ваших насосов.
Total Control
Гибкие возможности конфигурации для поддержания движения воды.
У вас есть возможность управлять своими помпами локально через Wi-Fi, для чего вам не требуется подключение к Интернету, или удаленно с помощью HYDROS Cloud. HYDROS Cloud позволяет вам общаться с WaveEngine через Интернет. HYDROS Cloud является частью платформы Amazon Web Services и Интернета вещей для обеспечения высокой безопасности и надежности.
Локальное управление дает вам возможность прямого доступа к вашим настройкам управления, если ваше интернет-соединение недоступно. Независимо от вашей ситуации, HYDROS WaveEngine будет работать, чтобы поддерживать жизнь обитателей вашего резервуара!
Универсальность в лучшем виде
Подключайтесь к сторонним контроллерам, таким как Neptune Systems Apex, GHL ProfiLux и Reef Angel.
WaveEngine имеет вход 0–10 В, поэтому вы можете подключить его к контроллеру стороннего производителя, например Neptune Systems Apex, GHL ProfiLux и Reef Angel. После подключения вы сможете контролировать скорость насоса и запускать различные режимы потока.
После подключения вы сможете контролировать скорость насоса и запускать различные режимы потока.
Подробнее »
HYDROS Control
Вы также можете напрямую подключить собственные контроллеры CoralVue для аквариумов к WaveEngine, используя порты командной шины. Это позволяет вашим устройствам HYDROS не только взаимодействовать друг с другом, но и позволяет WaveEngine питать другие контроллеры. Так что теперь у вас больше контроля и меньше беспорядка!
НОВОЕ в WaveEngine v2 — управление до 8 WiFi-устройствами
Как и другие элементы управления HYDROS, WaveEngine v2 может управлять до 8 WiFi-устройствами для дополнительного модульного управления дополнительным оборудованием, таким как освещение, насосы, питатели и т. д. просто добавив удлинитель HYDROS WiFi Power Strip или HYDROS Smart Plug (оба продаются отдельно).
Где купить »
Соедините их вместе
Для больших систем или коммерческих операций мы предлагаем межсистемную синхронизацию.

У вас большой аквариум или очень длинный фраг-бак? Вы можете соединить несколько WaveEngine вместе с WiFi, чтобы управлять еще большим количеством насосов! Насосы, подключенные к WaveEngine A, будут работать в идеальной синхронизации с насосами, подключенными к WaveEngine B, C, D и т. д., с точностью до 1/1000 секунды.
Создан на века
Вы защищены от брызг, соляного тумана и растекания соли, что обеспечивает долгий срок службы.
WaveEngine разработан для работы во влажной и соленой среде подставки для аквариума. Он заключен в водонепроницаемый, пыленепроницаемый промышленный корпус со степенью защиты IP65, который может намокнуть, не влияя на производительность. Используемые нами разъемы прочны, имеют цветовую маркировку и надежно завинчиваются. Этот тип соединителей используется в самолетах по всему миру и доказал свою прочность и надежность.
Сделано в США
WaveEngine разрабатываются, собираются и обслуживаются в США.
Волновые двигатели HYDROS собираются преданными аквариумистами в штаб-квартире CoralVue в Слайделле, штат Луизиана.
Пожалуйста, оставьте это поле пустым. Модель устройстваControl X4Control X2IceCap WiFi ControllerWaveEngineWaveEngine LEControl XP8Control X3Control XS
Kratos стали партнерами North American Wave Engine Corporation
| Источник:
Kratos Defense & Security Solutions, Inc.
Kratos Defense & Security Solutions, Inc.
САН-ДИЕГО, 9 июля 2021 г. (GLOBE NEWSWIRE) — Компания Kratos Defense & Security Solutions, Inc. (NASDAQ: KTOS), ведущий поставщик решений для национальной безопасности и ведущий в отрасли поставщик высокопроизводительных беспилотных систем, объявила сегодня что он сотрудничал с North American Wave Engine Corporation для разработки универсальной платформы воздушного базирования (VALP), транспортного средства воздушного базирования, предназначенного для использования и демонстрации недорогих высокоэффективных технологий для будущих воздушных систем. VALP будет использовать двигательную технологию Wave Engine Corp., чтобы изменить кривую затрат и сократить время разработки возможностей, необходимых для борьбы с близкими противниками.
VALP будет использовать двигательную технологию Wave Engine Corp., чтобы изменить кривую затрат и сократить время разработки возможностей, необходимых для борьбы с близкими противниками.
Фотография, сопровождающая это объявление, доступна по адресу https://www.globenewswire.com/NewsRoom/AttachmentNg/22fc74e3-d52b-4939-92a0-f0ac217a75fe
Стив Фендли, президент подразделения беспилотных систем Kratos , сказал: «Находясь в авангарде высокопроизводительных беспилотных систем, Kratos постоянно работает над технологиями, которые могут изменить парадигмы соотношения цены и качества. Мы рассчитываем на сотрудничество с Wave Engine Corp., чтобы продвинуть вперед и помочь вывести на рынок эту современную, новую платформу и двигательную технологию».
В июне 2021 года компания Wave Engine Corp. получила контракт на 1 миллион долларов от Управления вооружений ВВС США на создание и демонстрацию VALP в рамках усилий ВВС США по разработке высокоэффективных технологий, имеющих решающее значение для будущего авиации и авиации. бой. В поддержку присуждения этого контракта Кратос будет руководить аэродинамическим и конструктивным проектированием планера, а также обеспечивать инженерную поддержку систем.
бой. В поддержку присуждения этого контракта Кратос будет руководить аэродинамическим и конструктивным проектированием планера, а также обеспечивать инженерную поддержку систем.
Дааниш Макбул, генеральный директор North American Wave Engine Corporation, сказал: «Автомобиль, подобный VALP, требует инновационной философии дизайна, и мы рады иметь динамичного ведущего в отрасли партнера в этих усилиях. Мы с нетерпением ждем совместной работы с Kratos для разработки VALP и закладки технических основ для следующего поколения. высокопроизводительных летательных аппаратов».
Подразделение беспилотных систем Kratos является ведущим поставщиком высокопроизводительных беспилотных летательных аппаратов и целеуказания для репрезентативных целевых миссий по отработке оружия, радаров и других систем; и тактические воздушные беспилотные системы для ударных/разведывательных задач и миссий по умножению сил.
О Kratos Defense & Security Solutions
Kratos Defense & Security Solutions, Inc. (NASDAQ:KTOS) разрабатывает и внедряет передовые, доступные технологии, платформы и системы для клиентов, союзников и коммерческих предприятий, связанных с национальной безопасностью США. Kratos меняет способ быстрого вывода на рынок революционных технологий для этих отраслей с помощью проверенных коммерческих и венчурных подходов, включая активные исследования и оптимизированные процессы разработки. В Kratos доступность — это технология, и мы специализируемся на беспилотных системах, спутниковой связи, кибербезопасности/войне, микроволновой электронике, противоракетной обороне, гиперзвуковых системах, обучении, боевых системах и разработке турбореактивных и турбовентиляторных двигателей нового поколения. Для получения дополнительной информации посетите сайт www.KratosDefense.com.
(NASDAQ:KTOS) разрабатывает и внедряет передовые, доступные технологии, платформы и системы для клиентов, союзников и коммерческих предприятий, связанных с национальной безопасностью США. Kratos меняет способ быстрого вывода на рынок революционных технологий для этих отраслей с помощью проверенных коммерческих и венчурных подходов, включая активные исследования и оптимизированные процессы разработки. В Kratos доступность — это технология, и мы специализируемся на беспилотных системах, спутниковой связи, кибербезопасности/войне, микроволновой электронике, противоракетной обороне, гиперзвуковых системах, обучении, боевых системах и разработке турбореактивных и турбовентиляторных двигателей нового поколения. Для получения дополнительной информации посетите сайт www.KratosDefense.com.
Уведомление о прогнозных заявлениях
Некоторые заявления в этом пресс-релизе могут представлять собой «прогнозные заявления» по смыслу Закона о реформе судебных разбирательств по частным ценным бумагам от 1995 года. Эти прогнозные заявления сделаны на основе текущие убеждения, ожидания и предположения руководства Kratos и подвержены значительным рискам и неопределенности. Инвесторов предупреждают, чтобы они не слишком полагались на такие прогнозные заявления. Все такие заявления прогнозного характера действительны только на дату, когда они были сделаны, и Kratos не берет на себя никаких обязательств по обновлению или пересмотру этих заявлений, будь то в результате получения новой информации, будущих событий или иным образом. Хотя Кратос считает, что ожидания, отраженные в этих прогнозных заявлениях, являются разумными, эти заявления сопряжены со многими рисками и неопределенностями, которые могут привести к тому, что фактические результаты будут существенно отличаться от того, что может быть выражено или подразумеваемо в этих прогнозных заявлениях. Для дальнейшего обсуждения рисков и неопределенностей, которые могут привести к тому, что фактические результаты будут отличаться от результатов, выраженных в этих прогнозных заявлениях, а также рисков, связанных с бизнесом Kratos в целом, см.
Эти прогнозные заявления сделаны на основе текущие убеждения, ожидания и предположения руководства Kratos и подвержены значительным рискам и неопределенности. Инвесторов предупреждают, чтобы они не слишком полагались на такие прогнозные заявления. Все такие заявления прогнозного характера действительны только на дату, когда они были сделаны, и Kratos не берет на себя никаких обязательств по обновлению или пересмотру этих заявлений, будь то в результате получения новой информации, будущих событий или иным образом. Хотя Кратос считает, что ожидания, отраженные в этих прогнозных заявлениях, являются разумными, эти заявления сопряжены со многими рисками и неопределенностями, которые могут привести к тому, что фактические результаты будут существенно отличаться от того, что может быть выражено или подразумеваемо в этих прогнозных заявлениях. Для дальнейшего обсуждения рисков и неопределенностей, которые могут привести к тому, что фактические результаты будут отличаться от результатов, выраженных в этих прогнозных заявлениях, а также рисков, связанных с бизнесом Kratos в целом, см. раскрытие информации о рисках в годовом отчете по форме 10- K Кратоса за год, закончившийся 27 декабря 2020 г., а также в последующих отчетах по формам 10-Q и 8-K и других документах, поданных Кратосом в SEC.
раскрытие информации о рисках в годовом отчете по форме 10- K Кратоса за год, закончившийся 27 декабря 2020 г., а также в последующих отчетах по формам 10-Q и 8-K и других документах, поданных Кратосом в SEC.
Press Contact:
Yolanda White
858-812-7302 Direct
Investor Information:
877-934-4687
[email protected]
Versatile Air-Launched Platform (VALP)»Artist’s impression Универсальная платформа воздушного запуска (VALP) компании Wave Engine Corp. запущена с…
[Гостевая запись] Представляем WaveEngine 3.1 на базе .NET 5
Хавьер Ферреро
30 ноября 2020 г. 5 0
Это гостевой пост, написанный Хавьером Кантоном Ферреро . Хавьер — инженер по компьютерным наукам, всегда питавший страсть к 3D-графике и программной архитектуре. Его профессиональные достижения включают звание MVP для Windows DirectX и DirectX XNA за последние девять лет, представителя Xbox, а также статус студента-партнера Microsoft и самого ценного студента Microsoft во время учебы в колледже. В настоящее время он работает в Plainconcepts в качестве руководителя исследовательской группы, возглавляя талантливую команду, работающую над WaveEngine.
В настоящее время он работает в Plainconcepts в качестве руководителя исследовательской группы, возглавляя талантливую команду, работающую над WaveEngine.
Мы рады сообщить, что совместно с Microsoft мы только что выпустили WaveEngine 3.1 с официальной поддержкой .NET 5 и C# 9. Так что, если вы используете C# и .NET 5, вы можете начать создавать 3D-приложения на основе .NET 5 сегодня. Загрузите его со страницы загрузки WaveEngine прямо сейчас и начните создавать 3D-приложения на основе .NET 5 уже сегодня. Мы хотели бы поделиться с вами нашим путешествием по переходу с .NET Core 3.1 на .NET 5, а также некоторыми новыми функциями, которые стали возможными благодаря .NET 5.
От .NET Core 3.1 до .NET 5
Чтобы сделать это возможным, мы начали работать над этим год назад, когда решили переписать наш низкоуровневый API графической абстракции для поддержки новых графических API Vulkan, DirectX12 и Metal. В то время это был проект на базе .NET Framework с редактором на основе GTK#, у которого были проблемы с поддержкой новых разрешений, мультиэкрана или новых стандартов DPI. В то время мы следили за всеми большими достижениями в производительности, которые Microsoft делала в .NET Core и будущей платформе под названием .NET 5, и мы решили, что нам нужно согласовать наш движок с этим, чтобы использовать все преимущества новых функций производительности. , поэтому мы начали писать новый редактор на основе WPF и .NET Core и поменяли все наши расширения и библиотеки на .NET Core. Это заняло у нас год напряженной работы, но результаты сравнения нашей старой версии 2.5 и новой 3.1 с точки зрения производительности и использования памяти потрясающие, примерно в 4-5 раз быстрее.
В то время мы следили за всеми большими достижениями в производительности, которые Microsoft делала в .NET Core и будущей платформе под названием .NET 5, и мы решили, что нам нужно согласовать наш движок с этим, чтобы использовать все преимущества новых функций производительности. , поэтому мы начали писать новый редактор на основе WPF и .NET Core и поменяли все наши расширения и библиотеки на .NET Core. Это заняло у нас год напряженной работы, но результаты сравнения нашей старой версии 2.5 и новой 3.1 с точки зрения производительности и использования памяти потрясающие, примерно в 4-5 раз быстрее.
Теперь у нас есть официальная поддержка .NET 5, и эта технология готова для .NET 6, поэтому мы рады стать одним из первых движков, поддерживающих ее.
Это обзор того, что мы создаем с помощью WaveEngine 3.1 и .NET 5:
Мы используем стек .NET 5 на всех платформах, где это возможно, Windows, Linux, MacOS и Web, и мы используем стек Mono там, где это невозможно, но мы готовы к . NET 6, чтобы мы могли, наконец, унифицировать его, чтобы использовать единый стек .NET для всех наших поддерживаемых платформ.
NET 6, чтобы мы могли, наконец, унифицировать его, чтобы использовать единый стек .NET для всех наших поддерживаемых платформ.
Одна из самых интересных особенностей, которые вы видите на этой диаграмме, заключается в том, что WaveEngine легко интегрируется с несколькими технологиями пользовательского интерфейса, такими как WPF, Windows Forms или SDL. Если вам нужно интегрировать средство просмотра 3D-графики для визуализации данных в новые проекты с .NET 5, это отличная технология для использования.
WASM
Еще одна интересная технология в .NET 5 — новый компилятор под названием «dotnet-wasm» с возможностью компилировать код C# непосредственно в WASM для запуска в веб-браузерах. Microsoft продвигает эту технологию как сердце Blazor, и мы можем воспользоваться этим для запуска WaveEngine на веб-платформе с использованием dotnet-wasm, emscripten и WebGL/WebGPU. Это то, о чем мы мечтали в течение многих лет, и теперь это возможно, здесь вы можете увидеть это в действии с проектом Paidia:
(Демонстрационная версия Project Paidia — это простая игра с новой моделью искусственного интеллекта, работающей с использованием ONNX. js и WaveEngine в браузере)
js и WaveEngine в браузере)
Новый конвейер постобработки
С новым выпуском .NET 5 мы также опубликуем новый инструмент внутри нашего автономного редактора для редактирования конвейера постобработки с помощью графического редактора. Мы считаем, что это что-то новое в этой области, которое позволит пользователям разрабатывать профессиональные конвейеры постобработки в своих приложениях. Выглядит так:
Новый конвейер постобработки полностью основан на вычислительном шейдере, где можно применять новые методы, такие как LDS (локальный обмен данными), для улучшения стандартной производительности на основе пиксельного шейдера. Каждое поле в графе редактора представляет собой вычислительный шейдер с входными и выходными данными, пользователь может написать свой вычислительный шейдер в нашем редакторе эффектов или использовать некоторые из встроенных шейдеров, включенных в новую версию.
Для нашего стандартного материала новая версия поставляется со стандартной диаграммой постобработки, которую пользователи могут редактировать в соответствии со своими потребностями. Стандартный график поставляется со всеми этими методами: TAA (временное сглаживание), Bokeh DoF (глубина резкости), SSAO (окружающая окклюзия экранного пространства), SSR (отражения экранного пространства), размытие движения камеры, цветение, зернистость, виньетка, цветовой градиент. и FXAA.
Стандартный график поставляется со всеми этими методами: TAA (временное сглаживание), Bokeh DoF (глубина резкости), SSAO (окружающая окклюзия экранного пространства), SSR (отражения экранного пространства), размытие движения камеры, цветение, зернистость, виньетка, цветовой градиент. и FXAA.
В этом видео вы можете увидеть, как все эти методы применяются одновременно в демонстрационном проекте:
Ресурсы
Начните разработку 3D-приложений с помощью .NET 5 и C# 9 прямо сейчас, выполнив следующие шаги:
- Скачать WaveEngine 3.1
- Попробуйте новые образцы на основе .NET 5
- Доставьте нам ваши ценные отзывы
Posted in .NET Azure C# Game DevelopmentTagged .NET 5.0 azure C# Visual Studio WaveEngine
Галерея NuGet | WaveEngine.Platform 3.
 3.0.8617-превью
3.0.8617-превью
ПРОЧТИ МЕНЯ
Фреймворки
Зависимости
Использован
Версии
Предоставляет ряд абстракций для доступа к датчикам на разных платформах (например, акселерометр, компас, информация об устройстве, вибрация и т. д.)
д.)
| Продукт | Версии |
|---|---|
| .СЕТЬ | сеть5.0 net5.0-окна сеть6.0 net6.0-андроид net6.0-ios net6.0-маккатализатор net6.0-macos net6.0-твос net6.0-окна |
| .NET ядро | netcoreapp2.0 сетевое приложение2.1 сетевое приложение2.  2 2сетевое приложение3.0 сетевое приложение3.1 |
| Стандарт .NET | нетстандарт2.0 сетевой стандарт 2.1 |
| .NET Framework | сеть461 сеть462 сеть463 сеть47 сеть471 сеть472 сеть48 |
| МоноAndroid | моноандроид моноандроид81 |
| МоноМак | мономак |
| монотач | монотач |
| Тизен | тизен40 тизен60 |
| Универсальная платформа Windows | uap10. 0.16299 0.16299 |
| Xamarin.iOS | ксамариниос ксамариниос10 |
| Xamarin.Mac | ксамаринмак |
| Xamarin.TVOS | хамаринтвос |
| Xamarin.WatchOS | xamarinwatchos |
Совместимые целевые платформы
Дополнительные вычисляемые целевые платформы
Узнайте больше о целевых платформах и . NET Standard.
NET Standard.
.NETFramework 4.6.1
- Microsoft.NETFramework.ReferenceAssemblies
(>= 1.0.0) - WaveEngine.Common
(>= 3.3.0.8617-предварительная версия)
- Microsoft.NETFramework.ReferenceAssemblies
.NETСтандарт 2.0
- WaveEngine. Common
(>= 3.3.0.8617-предварительная версия)
- WaveEngine.
МоноАндроид 8.1
- WaveEngine.Common
(>= 3.3.0.8617-предварительная версия) - Xamarin.Essentials
(>= 1.5.3.2)
- WaveEngine.Common
нетто5.
0- WaveEngine.Common
(>= 3.3.0.8617-предварительная версия)
- WaveEngine.Common
UAP 10.0.16299
- WaveEngine.Common
(>= 3.3.0.8617-предварительная версия) - Xamarin.Essentials
(>= 1. 5.3.2)
- WaveEngine.Common
Xamarin. iOS 1.0
- WaveEngine.Common
(>= 3.3.0.8617-предварительная версия) - Xamarin.Essentials
(>= 1.5.3.2)
- WaveEngine.Common
 Common
Common 0
0 5.3.2)
5.3.2) пакеты NuGet (11)
Показаны 5 лучших пакетов NuGet, зависящих от WaveEngine. Platform:
Platform:
| Упаковка | загрузок |
|---|---|
WaveEngine.Framework Предоставляет классы, которые позволяют разработчику моделировать игру или приложение, используя архитектуру на основе компонентов, а также набор кроссплатформенных сервисов по умолчанию для подключения каждого компонента каждой целевой платформы | 98. 9К 9К |
WaveEngine.Vuforia Предоставляет компонент камеры для дополненной реальности на основе зрения с использованием Vuforia . | 34.0К |
WaveEngine.Сеть Предоставляет классы и компоненты для подключения нескольких клиентов по сети. | 27.3К |
WaveEngine.HLSLEverywhere Предоставляет услугу по переводу HLSL на языки шейдеров GLSL, ESSL, Metal и SPIR-V | 19.4К |
WaveEngine. Обеспечивает интеграцию физического компонента Bullet в Wave Engine | 18.3К |

 Bullet
Bullet репозиториев GitHub
Этот пакет не используется никакими популярными репозиториями GitHub.
| Версия | загрузок | Последнее обновление |
|---|---|---|
3. | 561 | 28.09.2021 |
3.3.0.8524-предварительная версия | 541 | 06. 09.2021 09.2021 |
3.2.0.7787-предварительная версия | 1175 | 04.05.2021 |
3. | 384 | 29.04.2021 |
3.1.0.6768-превью2 | 1600 | 17. 12.2020 12.2020 |
3.1.0.6468-превью | 992 | 20.11.2020 |
3. | 1078 | 15.09.2020 |
3.0.0.5807-превью4 | 608 | 28. 08.2020 08.2020 |
3.0.0.5175-превью3 | 1175 | 20.05.2020 |
3. | 701 | 19.05.2020 |
3.0.0.4932-превью3 | 943 | 13. 04.2020 04.2020 |
3.0.0.4731-превью3 | 804 | 26.03.2020 |
3. | 749 | 17.03.2020 |
3.0.0.4567-превью3 | 862 | 11. 03.2020 03.2020 |
3.0.0.4546-превью3 | 829 | 10.03.2020 |
3. | 946 | 02.12.2019 |
3.0.0.3510-превью2 | 869 | 07.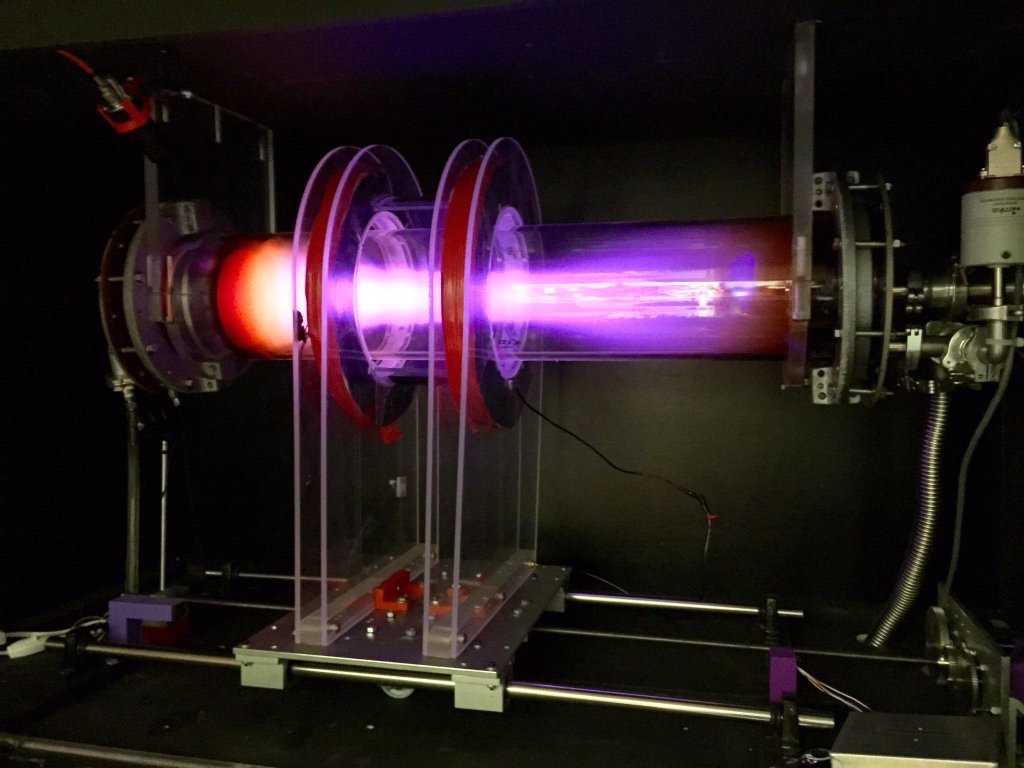 11.2019 11.2019 |
3.0.0.3452-превью2 | 812 | 29.10.2019 |
3. | 663 | 16.09.2019 |
3.0.0.2687-превью | 640 | 03. 09.2019 09.2019 |
3.0.0.2198-превью | 686 | 08.08.2019 |
3. | 671 | 24.07.2019 |
3.0.0.1538-предварительная версия | 669 | 18. 06.2019 06.2019 |
3.0.0.1535-предварительная версия | 539 | 18.06.2019 |
3. | 543 | 18.06.2019 |
3.0.0.1505 — предварительная версия | 586 | 18.
|
 3.0.8617-предварительная версия
3.0.8617-предварительная версия 2.0.7765-предварительная версия
2.0.7765-предварительная версия/mf4176.jpg) 0.0.5947-превью4
0.0.5947-превью4 0.0.5165-превью3
0.0.5165-превью3 0.0.4636-превью3
0.0.4636-превью3 0.0.3716-превью2
0.0.3716-превью2 0.0.2860 — предварительная версия
0.0.2860 — предварительная версия 0.0.1974-превью
0.0.1974-превью 0.0.1513-предварительная версия
0.0.1513-предварительная версия