Содержание
Волновые электродвигатели
- Подробности
- Категория: Электрические машины
- электродвигатель
В электроприводах общепромышленного и специального назначения для снижения частоты вращения привода нашли применение волновые передачи (волновые редукторы), обладающие рядом ценных свойств. Основное из них заключается в обеспечении значительного передаточного отношения (до 100 на одну ступень) при относительно малых собственных массе и габаритах. Волновые передачи к тому же отличаются высокой кинематической точностью отработки перемещений, надежностью и долговечностью в работе. Волновой двигатель сочетает в себе специфические свойства волновой передачи и электрической машины, что достигнуто их конструктивным объединением.
Электропривод с волновыми механическими передачами строится по обычной схеме: двигатель — волновая передача. Основным достоинством волнового двигателя является низкая частота вращения его выходного вала при значительном вращающем моменте, что позволяет непосредственно соединять его с производственным механизмом. Масса и габариты привода при этом оказываются меньше, чем у привода той же мощности, выполненного по обычной схеме двигатель — редуктор. Двигатель обладает и хорошим быстродействием. Время его пуска при питании от сети 50 Гц составляет сотые доли секунды, а при отключении напряжения ротор двигателя останавливается примерно за то же время практически без выбега. Двигатель имеет также низкий уровень вибраций, чем выгодно отличается от рассмотренных выше двигателей с катящимся ротором.
Масса и габариты привода при этом оказываются меньше, чем у привода той же мощности, выполненного по обычной схеме двигатель — редуктор. Двигатель обладает и хорошим быстродействием. Время его пуска при питании от сети 50 Гц составляет сотые доли секунды, а при отключении напряжения ротор двигателя останавливается примерно за то же время практически без выбега. Двигатель имеет также низкий уровень вибраций, чем выгодно отличается от рассмотренных выше двигателей с катящимся ротором.
Рассмотрим принцип действия волнового двигателя, обратившись для этого к рис. 1. Главная особенность конструкции двигателя состоит в наличии гибкого цилиндрического ротора 1, который может деформироваться в радиальном направлении. На внешней поверхности ротора крепится гибкий зубчатый венец 2. На статоре двигателя 3, который по своей конструкции принципиально не отличается от статоров обычных двигателей переменного тока, крепится жесткий зубчатый венец 4. Гибкий венец ротора и жесткий венец статора образуют обычную волновую передачу.
Рис. 1. Принцип действия волнового двигателя. а — схема конструкции; б — распределение индукции и силы магнитного притяжения вдоль окружности статора; е —схема двигателя при работе.
Подключим обмотки статора двигателя к сети переменного тока. Тогда в зазоре между статором и ротором появится, как обычно, вращающееся магнитное поле. Предположим, что это магнитное поле имеет два полюса (число пар полюсов обмотки статора р = 1) и магнитная индукция поля В2 в зазоре двигателя распределяется по синусоидальному закону, показанному сплошной линией на рис. 1,6. Тогда на ферромагнитный ротор, как это мы уже установили, рассматривая двигатель с катящимся ротором, будет действовать сила магнитного притяжения FK-a, ось которой совпадает с положением максимума магнитной индукции. Значение этой силы пропорционально квадрату магнитной индукции, и график ее изобразится пунктирной кривой на рис. 1,6. В результате действия этой силы ротор деформируется (рис. 1,в) и его зубчатый венец входит в зацепление с зубчатым венцом статора в двух диаметрально противоположных точках окружности статора (в отличие от двигателя с катящимся ротором, где точка касания статора и ротора была одна). При вращении поля статора синхронно вращается и волна деформации ротора, в результате чего зубчатый ненец ротора обкатывает зубчатый ненец статора.
При вращении поля статора синхронно вращается и волна деформации ротора, в результате чего зубчатый ненец ротора обкатывает зубчатый ненец статора.
Рис. 2. Реактивный волновой двигатель с радиально-осевым магнитным штоком.
Обычно ненцы статора и ротора делают с различным числом зубцов Zc и Zp, поэтому при обкатывании ротор совершает еще и медленное вращение вокруг своей оси, которое аналогично медленному вращению ротора двигателя с катящимся ротором. Это вращение ротора вокруг своей оси и является главным выходным движением волнового двигателя, и частота пр определяется по формуле
(1)
Снижая разниму между количеством зубцов статорного и роторного венцов, получают весьма низкие частоты вращения выходного вала волнового двигателя.
По своим характеристикам рассмотренный волновой двигатель является синхронным реактивным двигателем. Действительно, ось деформации гибкого ротора вращается синхронно с осью магнитного поля и частота вращения вала двигателя постоянна и находится в фиксированном соотношении (1) с частотой вращения поля статора. Деформированный ротор при этом, как нетрудно заметить, занимает положение, при котором магнитное сопротивление магнитному потоку минимально. Поэтому при появлении рассогласования (несовпадении) оси поля статора и оси деформации ротора, которое наступает, например, при нагружении двигателя внешним моментом сопротивления, ротор двигателя начинает развивать синхронизирующий момент, как у обычного синхронного реактивного двигателя. Этот момент уравновешивает приложенный внешний момент нагрузки, и двигатель продолжает вращаться со скоростью пр при наличии некоторого пространственного углового сдвига между осями ротора и поля статора.
Деформированный ротор при этом, как нетрудно заметить, занимает положение, при котором магнитное сопротивление магнитному потоку минимально. Поэтому при появлении рассогласования (несовпадении) оси поля статора и оси деформации ротора, которое наступает, например, при нагружении двигателя внешним моментом сопротивления, ротор двигателя начинает развивать синхронизирующий момент, как у обычного синхронного реактивного двигателя. Этот момент уравновешивает приложенный внешний момент нагрузки, и двигатель продолжает вращаться со скоростью пр при наличии некоторого пространственного углового сдвига между осями ротора и поля статора.
Волновые двигатели могут быть также и индукторными, повторяя обычные синхронные индукторные двигатели.
Заметим, что магнитное поле двигателя выполняет по существу роль электромагнитного генератора механических волн деформации, необходимого для работы обычной волновой передачи, причем в реактивном двигателе число волн деформации равно числу полюсов магнитного поля.
Рассмотрим некоторые практические конструкции волновых двигателей.
На рис. 2 показана упрощенная схема конструкции волнового двигателя реактивного типа с радиально-осевым замыканием магнитного потока.
Ротор 1 двигателя представляет собой гибкий тонкостенный металлический или пластмассовый стакан, укрепленный на валу 2 двигателя. На внешней поверхности ротора находится гибкий венец 3 волновой передачи. Вдоль внутренней поверхности ротора располагаются подвижные относительно друг друга ферромагнитные секторы 4, которые под действием силы магнитного притяжения могут перемещаться в радиальном направлении и деформировать гибкий ротор. К ротору они прижимаются центрирующими эластичными кольцами 5.
Магнитная система статора двигателя образована П-образными ферромагнитными сердечниками 6, на которых располагаются двух- или трехфазные обмотки переменного тока 7, создающие вращающееся магнитное поле. На статоре крепится неподвижный венец 8 волновой передачи.
Статор и ротор располагаются в корпусе 9 двигателя.
При подаче напряжения переменного тока на обмотки 7 двигателя сила магнитного притяжения действует на ферромагнитные секторы 4\ последние, притягиваясь к статору, деформируют ротор, который и приобретает форму, показанную на рис. 1 ,в.
На рис. 3 показана еще одна конструктивная схема волнового двигателя с радиальным замыканием магнитного потока.
Статор двигателя, размещенный в корпусе 1, имеет обычную для двигателей переменного тока конструкцию. Сердечник 2 статора набран из листов электротехнической стали, и в его пазы уложена двух- или трехфазная обмотка переменного тока 3, создающая вращающееся магнитное поле. На статоре крепится жесткий зубчатый венец 4 волновой передачи.
Гибкий ротор 5 имеет обычную для волнового двигателя конструкцию, и на его поверхности закреплен гибкий венец 6 волновой передачи.
Внутри ротора располагается упругое ферромагнитное кольцо 7, которое деформирует ротор под действием сил магнитного притяжения и одновременно является магнитопроводом. Кольцо 7 навивается из ленты ферромагнитного материала, например пермаллоя. Рассмотренная конструкция соответствует реактивному волновому двигателю.
Кольцо 7 навивается из ленты ферромагнитного материала, например пермаллоя. Рассмотренная конструкция соответствует реактивному волновому двигателю.
По конструктивным схемам, приведенным на рис. 2 и 3, может быть выполнен и индукторный волновой двигатель, который имеет лучшие энергетические показатели работы и развивает больший момент, чем реактивный волновой двигатель. Для индукторного двигателя характерно наличие на сердечнике статора помимо обмотки переменного тока еще и обмотки постоянного тока, с помощью которой в двигателях создается неизменный по направлению магнитный поток. Суммируясь, магнитные потоки обмоток переменного тока с индукцией Вс и обмотки постоянного тока с индукцией В„ образуют результирующее магнитное поле с индукцией Въ, распределение которой вдоль воздушного зазора для числа пар полюсов р= 1 показано сплошной линией на рис. 4,а и для р—2 на рис. 4,6. На этих же рисунках пунктиром показан график силы магнитного притяжения FM.u. Из рис. 4 видно, что в отличие от реактивного волнового двигателя ротор индукторного двигателя имеет число волн деформации, равное числу пар полюсов р. Необходимо при этом отметить, что промежуточная волна силы магнитного притяжения недостаточна по амплитуде для осуществления зацепления.
Необходимо при этом отметить, что промежуточная волна силы магнитного притяжения недостаточна по амплитуде для осуществления зацепления.
Рис. 3. Волновой двигатель с радиальным магнитным потоком.
Для получения симметричной деформации ротора стремятся иметь p> 2 (рис. 4,6), что снижает уровень вибрации волнового двигателя.
Отметим в заключение, что широкое применение волновых двигателей ограничивается сложностью конструкции и технологии изготовления эластичного ротора. Нецелесообразным пока из-за сравнительно невысоких
Рис. 4. Распределение индукции и силы магнитного притяжения индукторного волнового двигателя. а — при р— 1; б—при р= 2.
энергетических показателей является выпуск волновых двигателей на средние и большие мощности.
- Назад
- Вперёд
- Вы здесь:
- Главная
- Эл. машины
- Генераторы ЕСС
 org/ListItem»> Оборудование
org/ListItem»> ОборудованиеЕще по теме:
- Испытания по определению электрических величин электрических машин
- Основные повреждения электродвигателей
- Двигатели типа ДАБ
- Методы сушки электрических машин
- Автоматизация испытаний электрических машин
Роторно-волновой двигатель — Энергетика и промышленность России — № 4 (68) апрель 2006 года — WWW.EPRUSSIA.RU
http://www.eprussia.ru/epr/68/4662.htm
Газета «Энергетика и промышленность России» | № 4 (68) апрель 2006 года
Ни для кого не секрет, что 60‑70 % теплоты, вырабатываемой в настоящее время двигателями внутреннего сгорания, просто выбрасывается в атмосферу. В будущем же энергетика уже не сможет мириться с такими огромными потерями.
 Тогда, несомненно, будут востребованы только те технические решения, которые смогут преодолеть основные недостатки известных тепловых машин.
Тогда, несомненно, будут востребованы только те технические решения, которые смогут преодолеть основные недостатки известных тепловых машин.
Такие решения должны использовать плюсы существующих агрегатов: высокую экономичность дизелей; неограниченную мощность, малые габариты и вес газовых турбин; эффективное использование рабочего объема бензинового двигателя; бесшумность, многотопливность и высокий крутящий момент паровой машины и стирлинга; отсутствие органов газораспределения широко разрекламированного двигателя Ф.Ванкеля; высокий механический КПД и способность двигателя выполнять функции редуктора в нашумевшем бесшатунном двигателе С. Баландина и в малоизвестной конструкции Е. Льва; низкую токсичность выхлопа в двигателе В. Кушуля.
В тепловой машине, основанной на перечисленных преимуществах, можно будет полностью или частично отказаться от охлаждения и смазки, убрать глушитель шума и маховик. При этом деталей в ней будет не больше, чем в двухтактном мотовелодвигателе.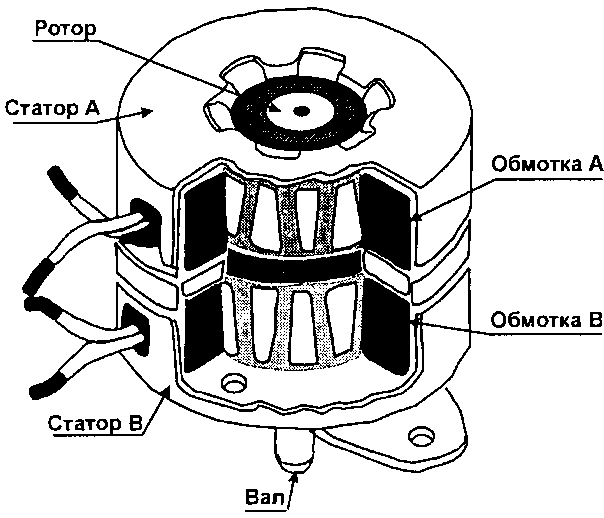
На современном этапе развития техники эта задача может быть решена только с помощью качественно новых конструктивных решений. Например, с помощью роторно-волнового двигателя (РВД) – объемной прямоточной машины, воспроизводящей последовательность работы газотурбинного двигателя (патент РФ № 2155272).
Принцип «движущихся» волн
В этом агрегате совершенно устранено возвратно-поступательное движение рабочих органов, ротор полностью уравновешен и вращается с постоянной угловой скоростью. Рабочее тело, как и в турбине, движется вдоль оси двигателя; траектория движения – винтовая линия. В конструкции нет вредного пространства, ограничивающего рост степени сжатия рабочего тела. Из‑за отсутствия уплотнительных элементов и, соответственно, трения в проточной части снимаются ограничения по ресурсу и числу оборотов двигателя. Есть возможность произвольно изменять степень сжатия и расширения рабочего тела, а также без дополнительных регулировок и остановки двигателя осуществлять переход на любой сорт топлива.
Оригинальная кинематическая схема и оптимальный рабочий процесс роторного двигателя позволяют связать в одной конструкции положительные стороны всех известных ДВС. В основе кинематики РВД лежит сферический механизм, при этом оси его основных деталей пересекаются в одном месте – центре воображаемой сферы.
Установленный с минимальным зазором конический винтовой ротор совмещает вращение с противоположным ему планетарным обкатыванием по внутренним огибающим корпуса. Накладывая два эти вида движения на любые сечения ротора (кроме центра – точки его перегиба), можно увидеть, что они совершают в определенной последовательности равные угловые колебания в пазах корпуса, образуя волны, которые последовательно перекатываются по ходу винтовых поверхностей корпуса. Аналогичный процесс можно видеть на море в ветреную погоду, наблюдая за перемещением волн в «стоячей» воде.
В компрессорном отсеке формирование и движение волн начинаются от периферии по направлению к центру, а в расширительном отсеке – наоборот, от центра к периферии.
Как действует РВД?
Ротор и вал отбора мощности соединяются между собой в центре двигателя шарниром Гука, который можно назвать шарниром равных угловых скоростей (ШРУСом). Необходимое же ротору «дополнительное» обкатывание по внутренним огибающим корпуса задается вспомогательным устройством – так называемым «генератором волн». Его основной элемент – вращающийся на основном валу эксцентрик, с приводом через блок шестерен все от того же вала. Эксцентрик, наклоняя ротор на угол от 3 до 6 градусов, обеспечивает качание сечениям ротора в пределах от 12 до 24 градусов. В такой комплектации расчетный механический КПД двигателя составит невиданную цифру – 97 %.
С началом вращения винтовые поверхности ротора начинают открывать внутренние полости винтовых каналов компрессорного отсека, заталкивая в них воздух двумя потоками, смещенными относительно друг друга на 180°. За один оборот ротора в оба канала компрессорного отсека засасываются и отсекаются от впускного тракта по две порции воздуха. При дальнейшем повороте каждая порция воздуха начнет самостоятельно перемещаться к центру двигателя, непрерывно сокращаясь в объеме за счет уменьшения шага и амплитуды самого витка. Процесс сжатия будет продолжаться до тех пор, пока все уменьшающийся объем со сжатым воздухом не подойдет к камере сгорания. В этот момент процесс внутреннего сжатия воздуха в компрессорном отсеке закончится, и наступает следующий этап – выталкивание сжатого воздуха в камеру сгорания тыльной стороной витка, ближе других находящегося к центру ротора. Этот процесс сопровождается непрерывным распылением топлива в воздушном потоке с последующим его сгоранием в общей камере, куда и уходят все порции воздуха.
При дальнейшем повороте каждая порция воздуха начнет самостоятельно перемещаться к центру двигателя, непрерывно сокращаясь в объеме за счет уменьшения шага и амплитуды самого витка. Процесс сжатия будет продолжаться до тех пор, пока все уменьшающийся объем со сжатым воздухом не подойдет к камере сгорания. В этот момент процесс внутреннего сжатия воздуха в компрессорном отсеке закончится, и наступает следующий этап – выталкивание сжатого воздуха в камеру сгорания тыльной стороной витка, ближе других находящегося к центру ротора. Этот процесс сопровождается непрерывным распылением топлива в воздушном потоке с последующим его сгоранием в общей камере, куда и уходят все порции воздуха.
Для первоначального поджигания топливо-воздушной смеси в камере устанавливается запальная свеча. После запуска дальнейшее поджигание смеси должно поддерживаться газами, оставшимися от предыдущих циклов в общей камере сгорания. Последние, с высокой температурой и давлением, покидая камеру сгорания, заполняют на роторе винтовые каналы расширительных отсеков, расположенных по другую сторону от центра ротора (точки, где шаг и амплитуда угловых колебаний равна нулю).
С поворотом последнего происходит увеличение объемов расширительных отсеков – за счет чего и осуществляется рабочий ход. На момент максимального расширения кромки наружных витков ротора открываются и газы сначала свободно, а затем принудительно выходят в выпускной коллектор. Интервал выпуска отработанных газов из очередной камеры расширения составит 180°. Часть полученной в цикле мощности возвращается телом ротора в компрессорный отсек.
Двигатель – сам себе редуктор
Описанный рабочий процесс соответствует самой простой конструкции, в которой двухзаходный корпус работает в паре с однозаходным ротором. Рост же числа заходов неизбежно приводит к усложнению формы корпуса и ротора, которые между собой будут соотноситься в пропорции: 2/1, 3/2, 4/3, 5/4 и т. д. Поперечные сечения тел ротора и корпуса во всех случаях будут иметь гипотрохоидные формы с внешними огибающими.
Рассмотренный тип двигателя, в основе которого лежит внутреннее винтовое зацепление ротора с корпусом, образует новое семейство прямоточных коловратных машин: в нем с увеличением числа заходов ротора и корпуса угловая скорость ротора и, соответственно, вала отбора мощности, оборудованного ШРУСом, будет падать с одновременным ростом величины крутящего момента.
Эта замечательная особенность кинематической схемы РВД позволит многозаходному ротору «по совместительству» выполнять еще и функцию понижающего редуктора. Ведь не секрет, что рост мощности двигателя всегда идет по пути увеличения рабочих оборотов (больше‑то некуда), а потребители энергии, будь то винт судна или автомобильное колесо, остаются практически неизменными. Поэтому приходится ставить дополнительные редукторы для снижения оборотов. А здесь – двигатель сам себе редуктор.
Функция редуктора во многозаходных конструкциях возложена на механизм синхронизации, состоящий из неподвижного венца с внутренним зацеплением и меньшей по диаметру планетарной шестерни с внешним зацеплением, жестко соединенной с ротором. Количество зубьев венца в шестерне всегда должно соответствовать выбранной пропорции корпуса к ротору. Иначе нельзя: только этим достигается синхронизация и требуемое трохоидное движение ротора. Каждому новому обкатыванию шестерни ротора будет соответствовать ее поворот на фиксированный вместе с ротором угол.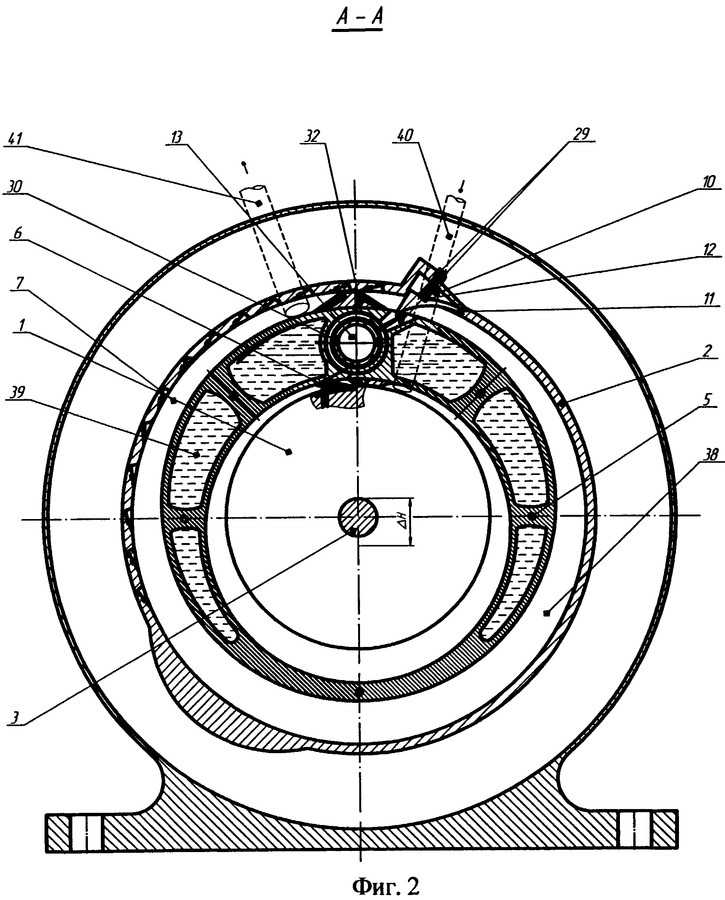 Для двухзаходного ротора, работающего в паре с трехзаходным корпусом, на одно обкатывание шестерни приходится поворот ротора в корпусе на 50 %, в трехзаходном варианте ротора – на 33 %, в четырехзаходном – на 25 % и т. д.
Для двухзаходного ротора, работающего в паре с трехзаходным корпусом, на одно обкатывание шестерни приходится поворот ротора в корпусе на 50 %, в трехзаходном варианте ротора – на 33 %, в четырехзаходном – на 25 % и т. д.
Если изначально однозаходный ротор, работающий в паре с двухзаходным корпусом, эквивалентен восьмицилиндровому поршневому ДВС, то уже двухзаходный ротор в паре с трехзаходным корпусом эквивалентны 24‑цилиндровому ДВС! Дальше – больше. Трехзаходный ротор соответствует 48-цилиндровому поршневому ДВС, четырехзаходный – 80-цилиндровому ДВС и т. д.
Для четырехзаходного ротора, у которого будет несколько меньший механический КПД (94‑95 %), расчетный крутящий момент на выходном валу увеличится по сравнению с поршневым аналогом с 16 до 21 раза. Причем – при равных с ним оборотах и литраже двигателя. Это – для автомобильного варианта, например, – само по себе уже не требует установки коробки передач, которая повышает крутящий момент двигателя всего в 4‑10 раз.
В новом двигателе ротор, производя полный оборот, вынужден при этом совершать четыре полных обкатывания по внутренним огибающим корпуса. Соответственно, при 2500 об/мин каждый из пяти винтовых каналов корпуса должен впустить по 10000 объемов воздуха, что в сумме составит 50000 объемов в минуту. Для сравнения: у аналогичного одноцилиндрового четырехтактного ДВС при равном числе оборотов количество тактов всасывания наполнит 625 рабочих объемов двигателя (каждый четвертый такт – всасывание). Отсюда и получается восьмидесятикратная разница. А учитывая низкий коэффициент наполнения безнаддувного поршневого двигателя (85% против 100‑105% в РВД), фактическое преимущество увеличится до 94 раз. При этом мы не учли еще разницу в механическом КПД поршневого ДВС и РВД (85% против 94%). Но ее соотнесем на протечки рабочего тела через «неплотности» ротора.
Осталось упомянуть и о предельно допустимых оборотах РВД. Современный поршневой ДВС применяет 4500‑6000 об/мин. Аналогичная по мощности газовая турбина свободно раскручивается до 50000‑70000 оборотов. РВД занимает промежуточное положение – от 2500 до 30000 оборотов (все зависит от количества заходов ротора).
РВД занимает промежуточное положение – от 2500 до 30000 оборотов (все зависит от количества заходов ротора).
Воздух на шарнирах
В рабочих отсеках РВД одновременно может сжиматься и расширяться от нескольких единиц до нескольких десятков объемов воздуха. А то место, где ротор приближается, едва не касаясь поверхностью на минимальное расстояние к корпусу, – как раз и является подвижной разделительной линией между последовательно движущимися камерами. За каждый оборот ротора степень сжатия (расширения) изменяется в 4‑5 раз. Теоретическая же степень сжатия (расширения) в одном агрегате может достигать ста единиц (все зависит от количества витков), и это при полном отказе от уплотнительных элементов, роль которых выполняет тело ротора.
Ротор, освобождаясь от механического трения, «завинчивает» порции воздуха в камеру сгорания, нигде не касаясь стенок корпуса, – поэтому отпадает и необходимость в смазке рабочих отсеков двигателя. Трение остается лишь в подшипниках качения, на которые опирается ротор за пределами горячих зон и в ШРУСе. Последний конструктивно позволяет передавать весь поток мощности от ротора выходному валу фактически без потерь (достаточно вспомнить, что механический КПД широко используемых в технике ШРУСов очень высок и колеблется при малых углах качания от 99 до 99,5 %). Кроме того, шарнирное соединение автоматически точно центрирует ротор в любом его положении, а сам шарнир, расположенный в центре двигателя, надежно защищен от теплового воздействия камеры сгорания необходимой толщиной сферического теплового экрана.
Последний конструктивно позволяет передавать весь поток мощности от ротора выходному валу фактически без потерь (достаточно вспомнить, что механический КПД широко используемых в технике ШРУСов очень высок и колеблется при малых углах качания от 99 до 99,5 %). Кроме того, шарнирное соединение автоматически точно центрирует ротор в любом его положении, а сам шарнир, расположенный в центре двигателя, надежно защищен от теплового воздействия камеры сгорания необходимой толщиной сферического теплового экрана.
Время работы двигателя увеличивается
Таким образом, в РВД ничто не препятствует применению очень высоких оборотов: ротор вращается с постоянной угловой скоростью, он прекрасно уравновешивается, вместо клапанов (или даже окон) в конструкции используются каналы неограниченной пропускной способности для непрерывного поступления воздуха в рабочие отсеки двигателя. Отсутствие трения снимает также ограничения по износу деталей и ресурсу двигателя в целом. В двигателе будут изнашиваться только подшипники, а для них ресурс в 30‑40 тыс. рабочих часов – не предел.
рабочих часов – не предел.
Заметим, что хороший автомобильный двигатель в наше время имеет моторесурс 5000‑7000 часов до первого ремонта. В то же время автомобильные РВД при неограниченной мощности окажутся долговечнее даже, чем рама автомобиля (т. е. самое долговечное, что в нем есть).
Рабочий процесс для камеры постоянного сгорания позволяет, не останавливая двигатель, подавать в него любой вид жидкого, газообразного или даже твердого распыленного топлива – явное преимущество перед турбинами, дизельными и карбюраторными двигателями.
В кинематических звеньях механизмов поршневых и роторных ДВС есть так называемые «мертвые точки». Для их преодоления за двигателем устанавливается значительный по массе маховик. В РВД же газовые силы, действующие на ротор, направлены всегда по касательной к его поверхности, они постоянны и непрерывны, что делает совершенно не нужной установку маховика, а в некоторых случаях – и противовесов, применяемых для полного уравновешивания двигателя.
Компоновочная схема компрессорного и расширительного отсеков РВД такова, что допускает также, без остановки двигателя, в широких пределах изменять степень сжатия и расширения рабочего тела, в том числе – до полного расширения отработанных газов, когда отпадает необходимость в глушителе шума. При этом не только исчезает значительное сопротивление, которое создает глушитель, отнимая у двигателя до 10 % его мощности, но и в процессе продолженного расширения, выделяется еще 10‑15 % дополнительной энергии.
Наконец, главный резерв повышения КПД роторно-волнового двигателя – применение в конструкции керамических материалов: жаропрочных теплоизолированных покрытий, позволяющих отказаться от системы охлаждения. Это позволяет новым агрегатам заменить собой сложнейшие турбокомпаундные двигатели. Причем используются только те свойства керамики, которыми она всегда обладала, – способность работать на сжатие, умеренное растяжение при стабильной температуре и давление во всех сечениях корпуса и ротора.
В заключение приведем еще несколько цифр. Расчетный индикаторный КПД простого цикла РВД в адиабатном исполнении и при весьма умеренной степени сжатия, равной 15 со степенью расширения 36, составит 51 %. Соответственно, расход топлива в этом случае может составить 171 г/кВт при удельном весе силовой установки 0,15‑0,25 кг/кВт.
Для сравнения: в дизельном двигателе, использующем такую же степень сжатия, расход топлива составляет 224 г / кВт при удельном весе 3,5‑15 кг/кВт.
А за счет дальнейшего увеличения степени сжатия в РВД и использования в нем системы регенерации отработанных газов (для возврата теряемой с отработанными газами теплоты) индикаторный КПД теплового цикла можно увеличить еще более значительно.
Там, где требуется получить максимальный расход воздуха и огромные мощности, например в авиационных двигателях и судовых установках, выгоднее использовать многозаходные кинематические схемы, ограниченные по росту степени сжатия. Если главным фактором выступает экономичность, перспективней использовать двух-трехзаходные схемы роторов, как наиболее простые и допускающие наибольшую степень сжатия и расширения рабочего тела.
Необходимо признать, что на данный момент сильно отстает технологическая база предприятий, которые можно привлекать для изготовления подобного класса машин. Но вместе с тем интенсивное развитие компьютерного проектирования способно решить многие технические вопросы, открывая тем самым благоприятные условия для создания высокоэкономичных и экологически безопасных энергетических установок, какими являются роторно-волновые двигатели.
Также читайте в номере № 4 (68) апрель 2006 года:
- ТГК-5 определили приоритет развития
На недавней встрече (9 марта) председатель правления РАО «ЕЭС России» Анатолий Чубайс на встрече с генеральным директором ОАО «ТГК-5» Владимиром Лебедевым одобрил инвестиционную программу ТГК-5 на 2006‑2010 годы. Анатолий Чубайс высоко оцени…
- Вентильный электродвигатель нового поколения для нефтепроводов
Специалистами ООО «ВНИИСТ-Энерготехнология» разработан проект вентильного электродвигателя нового поколения для использования его в качестве привода магистральных насосов на нефтеперекачивающих станциях.
 Вентильные двигатели примен…
Вентильные двигатели примен… - Технология газификации Тюмени
В Тюменской области есть удаленные районы, газификация которых отстает от требований времени. О том, как в области решается проблема газоснабжения таких районов, рассказал губернатор Тюменской области Владимир Якушев на заседании Совета …
- Инновационные технологии Schneider Electric для электротехнического рынка России: вакуумные выключатели Evolis
Компания братьев Шнейдер, созданная в 1836 году в восточной Франции, изначально занималась угледобычей и черной металлургией. С середины 80‑х годов XX века она сконцентрировалась на производстве оборудования для распределения электроэнер…
- Дети пишут об энергетике
В акционерном обществе «Курскэнерго» подведены итоги конкурса на лучшее сочинение по теме «Энергия в нашей жизни», проводившегося среди учащихся школ Курской области. Генеральный директор «Курскэнерго» Д.
В. Гурин вручил победителям кон…
 Вентильные двигатели примен…
Вентильные двигатели примен… В. Гурин вручил победителям кон…
В. Гурин вручил победителям кон…
Смотрите и читайте нас в
О компании — Wave Engine Corp. управления для разработки авиационной силовой установки будущего. Основанная в районе метро Балтимор-Вашингтон, мы представляем собой целеустремленную группу ученых, инженеров, слесарей и бывших руководителей аэрокосмической и оборонной промышленности из списка Fortune 500, которая работает над тем, чтобы обеспечить следующий ренессанс в аэрокосмической отрасли.
Дааниш Макбул
Главный исполнительный директор
Д-р Макбул является генеральным директором Wave Engine Corp., руководя техническими и корпоративными усилиями с момента основания компании. Он обладает более чем десятилетним опытом разработки силовых и двигательных систем в Университете Мэриленда и Массачусетском технологическом институте. Доктор Макбул имеет докторскую степень. получил степень бакалавра аэрокосмической техники в Университете Мэриленда.
Эндрю Гелтман
Вице-президент по производству
Г-н Гелтман занимает должность вице-президента по эксплуатации Wave Engine Corp. и отвечает за административную, финансовую и юридическую деятельность. До своей нынешней должности г-н Гельтман был научным сотрудником по связям с государственными органами в Merck и Cubist Pharmaceuticals, отвечая за участие правительства, государственную политику и вопросы интеллектуальной собственности. Г-н Гелтман имеет степень доктора права юридического факультета Мэрилендского университета.
Bert VanDerHeiden
Главный операционный директор
Д-р VanDerHeiden является главным операционным директором Wave Engine Corp. Он обладает более чем тридцатилетним техническим и руководящим опытом в аэрокосмической и оборонной промышленности. Совсем недавно он был вице-президентом по военному и пусковому сегменту в Northrop Grumman, где он руководил портфелем стоимостью 600 миллионов долларов с 50 программами, включая программы F-35, F-22 и THAAD. Доктор ВандерХейден имеет докторскую степень. по физике из Университета Юты.
Доктор ВандерХейден имеет докторскую степень. по физике из Университета Юты.
Уэйн Кеннард
Главный юрисконсульт
Г-н Кеннард является главным юрисконсультом корпорации Wave Engine, где он управляет юридическими вопросами компании и портфелем интеллектуальной собственности. До своей нынешней должности он был старшим партнером в WilmerHale, где специализировался на представлении интересов высокотехнологичных компаний по широкому кругу вопросов корпоративного права, интеллектуальной собственности и лицензирования. Г-н Кеннард имеет степень доктора права юридического факультета Университета Джорджа Вашингтона.
Гэри Замероски
Вице-президент по развитию бизнеса и директору по стратегии
Г-н Замероски является вице-президентом по развитию бизнеса и директором по стратегии в Wave Engine Corp., где он управляет бизнес-стратегией, связями с общественностью и партнерскими отношениями. Он занимал руководящие должности в GE Aviation, Textron, Airbus и совсем недавно в Honeywell Aerospace, где руководил стратегическим бизнес-подразделением стоимостью 6 млрд долларов США по стратегии, инновациям и маркетингу. Г-н Замероски является аэрокосмическим инженером, летчиком и имеет ученые степени Американского и Джорджтаунского университетов в Вашингтоне, округ Колумбия.
Г-н Замероски является аэрокосмическим инженером, летчиком и имеет ученые степени Американского и Джорджтаунского университетов в Вашингтоне, округ Колумбия.
Дааниш Макбул
Генеральный директор Wave Engine Corp.
Доктор Макбул руководил техническими и корпоративными усилиями Wave Engine Corp. с момента основания компании. Он обладает более чем десятилетним опытом разработки силовых и двигательных систем в Университете Мэриленда и Массачусетском технологическом институте.
Эйлин О’Рурк
Финансовый директор Фонда Абелл (наблюдатель)
Г-жа О’Рурк является финансовым директором Фонда Абелл. Она управляет финансовыми операциями Фонда и влияет на инвестиционный портфель инновационных технологий. Она занимала руководящие должности в компаниях KPMG и Legg-Mason, Inc. и обладает более чем тридцатилетним опытом работы в сфере финансов и управления бизнесом.
Берт ВанДерХайден
Главный операционный директор Wave Engine Corp. и бывший вице-президент Northrop Grumman
и бывший вице-президент Northrop Grumman
Доктор ВанДерХайден обладает более чем тридцатилетним техническим и руководящим опытом в аэрокосмической и оборонной промышленности. Совсем недавно он был вице-президентом по военному и пусковому сегменту в Northrop Grumman, где он руководил портфелем стоимостью 600 миллионов долларов с 50 программами, включая программы F-35, F-22 и THAAD.
Патрик Дагган
Управляющий директор, Gula Tech Adventures
Полковник (справа) Патрик Дагган является управляющим директором Gula Tech Adventures, где он обладает более чем 25-летним опытом работы в коммерческом, государственном и оборонном секторах. Пэт — зеленый берет на пенсии, успешный руководитель в области технологий и бывший директор Совета национальной безопасности в Белом доме.
Гур Кимчи
Бывший вице-президент Amazon Prime Air
Г-н Кимчи стал соучредителем Prime Air, автономной платформы воздушной логистики Amazon, и руководил Amazon Prime Air, пройдя сертификацию FAA Part 135 Air-Carrier. Он также был одним из основателей Консультативного комитета FAA по дронам, занимал руководящие должности в Microsoft и VocalTec и был членом совета директоров Waze до ее приобретения Google.
Он также был одним из основателей Консультативного комитета FAA по дронам, занимал руководящие должности в Microsoft и VocalTec и был членом совета директоров Waze до ее приобретения Google.
Первый полномасштабный прототип двигателей разработан и испытан в Университете Мэриленда.
Усовершенствования в области разработки и тестирования с помощью специального испытательного стенда и поддержки со стороны корпорации по развитию технологий штата Мэриленд (TEDCO).
Корпорация Wave Engine собирает 1,45 миллиона долларов в рамках посевного раунда с участием Maryland Momentum Fund, Abell Foundation и Gula Tech Adventures.
Корпорация Wave Engine получает от Агентства перспективных исследовательских проектов Министерства обороны (DARPA) грант в размере 2,85 млн долларов на продолжение разработки двигателей для высокопроизводительных БПЛА.
Первый пилотируемый самолет с силовой установкой корпорации Wave Engine поднимается в воздух, что означает значительный скачок в технологической готовности.
Корпорация Wave Engine заключила контракт с ВВС США на начало разработки первого транспортного средства Wave Engine Corp., универсальной платформы воздушного базирования (VALP).
Ссылка для загрузки страницы Перейти к началу
Wave Engine теперь называется Evergine – GameFromScratch.com
Wave Engine — это игровой движок, который мы ранее называли «лучшим игровым движком, который никто не использует», теперь он известен как Evergine. Во многих смыслах вы можете думать об Evergine как о Wave Engine 4 (последний релиз был в мае). Тем не менее, этот ребрендинг также принес несколько новых функций:
- New launcher
- New .Net 6 templates with C# 10
- Visual Studio 2022 project support
- New RayTracing API
- New documentation website
- New Package System
- Debugging WASM web apps
- New Entity Prefabs
- Новый графический инструмент постобработки
- AMD FidelityFX Super Resolution
- Поддержка приложений WinUI
- Новые входящие дополнения
- Новое расширение ImGUI
- Новый API запросов GPU
Основные ссылки
- Домашняя страница Evergine
- Объявление о ребрендинге
- Образец страницы Evergine на GitHub
Вы можете узнать больше о новом игровом движке Evergine ниже и увидеть его вкратце в видео о новом игровом движке Evergine. Evergine требует, чтобы вы установили только что выпущенную Visual Studio 2022, о которой вы можете узнать больше прямо здесь.
Evergine требует, чтобы вы установили только что выпущенную Visual Studio 2022, о которой вы можете узнать больше прямо здесь.
Категории
Архивы GameDev
Архивы GameDev
Выберите месяц ноябрь 2022 (3) октябрь 2022 (18) сентябрь 2022 (19)) август 2022 г. (18) июль 2022 г. (13) июнь 2022 г. (22) май 2022 г. (23) апрель 2022 г. (28) март 2022 г. (29) февраль 2022 г. (21) январь 2022 г. (21) декабрь 2021 г. (18) ноябрь 2021 г. (26) ) октябрь 2021 г. (22) сентябрь 2021 г. (21) август 2021 г. (23) июль 2021 г. (24) июнь 2021 г. (23) май 2021 г. (24) апрель 2021 г. (28) март 2021 г. (35) февраль 2021 г. (26) январь 2021 г. (28) ) декабрь 2020 (33) ноябрь 2020 (38) октябрь 2020 (34) сентябрь 2020 (38) август 2020 (30) июль 2020 (33) июнь 2020 (34) май 2020 (27) апрель 2020 (34) март 2020 (31) ) февраль 2020 г. (26) январь 2020 г. (22) декабрь 2019 г.(20) ноябрь 2019 г. (23) октябрь 2019 г. (34) сентябрь 2019 г. (30) август 2019 г. (17) июль 2019 г. (25) июнь 2019 г. (22) май 2019 г. (26) апрель 2019 г. (21) март 2019 г. (28) февраль 2019 г. (24) январь 2019 г. (27) декабрь 2018 г. (14) ноябрь 2018 г. (19) октябрь 2018 г. (22) сентябрь 2018 г. (23) август 2018 г. (23) июль 2018 г. (30) июнь 2018 г. (32) май 2018 г. (33) апрель 2018 г. (21) март 2018 г. (29) февраль 2018 г. (16) январь 2018 г. (18) декабрь 2017 г. (15) ноябрь 2017 г. (15) октябрь 2017 г. (15) сентябрь 2017 г. (20) август 2017 г. (12) июль 2017 г. (15) июнь 2017 г. (25) май 2017 г. (20) апрель 2017 г. (16) март 2017 г. (30) февраль 2017 г. (31) январь 2017 г. (24) декабрь 2016 г. (32) ноябрь 2016 г. (42) октябрь 2016 г. (27) сентябрь 2016 г. (34) август 2016 г. (32) июль 2016 г. (35) июнь 2016 г. (37) май 2016 г. (48) апрель 2016 г. (83) март 2016 г. (56) февраль 2016 г. (43) январь 2016 г. (54) декабрь 2015 г. (44) ноябрь 2015 г.
(26) январь 2020 г. (22) декабрь 2019 г.(20) ноябрь 2019 г. (23) октябрь 2019 г. (34) сентябрь 2019 г. (30) август 2019 г. (17) июль 2019 г. (25) июнь 2019 г. (22) май 2019 г. (26) апрель 2019 г. (21) март 2019 г. (28) февраль 2019 г. (24) январь 2019 г. (27) декабрь 2018 г. (14) ноябрь 2018 г. (19) октябрь 2018 г. (22) сентябрь 2018 г. (23) август 2018 г. (23) июль 2018 г. (30) июнь 2018 г. (32) май 2018 г. (33) апрель 2018 г. (21) март 2018 г. (29) февраль 2018 г. (16) январь 2018 г. (18) декабрь 2017 г. (15) ноябрь 2017 г. (15) октябрь 2017 г. (15) сентябрь 2017 г. (20) август 2017 г. (12) июль 2017 г. (15) июнь 2017 г. (25) май 2017 г. (20) апрель 2017 г. (16) март 2017 г. (30) февраль 2017 г. (31) январь 2017 г. (24) декабрь 2016 г. (32) ноябрь 2016 г. (42) октябрь 2016 г. (27) сентябрь 2016 г. (34) август 2016 г. (32) июль 2016 г. (35) июнь 2016 г. (37) май 2016 г. (48) апрель 2016 г. (83) март 2016 г. (56) февраль 2016 г. (43) январь 2016 г. (54) декабрь 2015 г. (44) ноябрь 2015 г.