Содержание
«Роскосмос» впервые показал робота для работы в открытом космосе
https://ria.ru/20220207/robot-1771512246.html
«Роскосмос» впервые показал робота для работы в открытом космосе
«Роскосмос» впервые показал робота для работы в открытом космосе — РИА Новости, 07.02.2022
«Роскосмос» впервые показал робота для работы в открытом космосе
«Роскосмос» впервые показал антропоморфного робота нового поколения «Теледроид», предназначенного для работ в открытом космосе. Фотографии и видео, а также… РИА Новости, 07.02.2022
2022-02-07T16:44
2022-02-07T16:44
2022-02-07T19:22
наука
космос — риа наука
алексей овчинин
александр скворцов
луна
россия
фонд перспективных исследований
мчс россии (министерство рф по делам гражданской обороны, чрезвычайным ситуациям и ликвидации последствий стихийных бедствий)
/html/head/meta[@name=’og:title’]/@content
/html/head/meta[@name=’og:description’]/@content
https://cdnn21. img.ria.ru/images/07e6/02/07/1771522121_0:0:1920:1080_1920x0_80_0_0_bb9f455ce387fa8587d8865137922bd6.jpg
img.ria.ru/images/07e6/02/07/1771522121_0:0:1920:1080_1920x0_80_0_0_bb9f455ce387fa8587d8865137922bd6.jpg
МОСКВА, 7 фев — РИА Новости. «Роскосмос» впервые показал антропоморфного робота нового поколения «Теледроид», предназначенного для работ в открытом космосе. Фотографии и видео, а также 3D-модель робота выложили на сайте госкорпорации.Ранее сообщалось о планах запустить «Теледроид» на МКС в 2024 году. Эксперименты, которые предполагается провести с ним на станции, позволят получить задел для создания роботов, которые будут работать на Луне и окололунной орбите.»Теледроид» внешне напоминает торс человека. Функционировать он будет в режиме аватара, копируя движения оператора в специальном костюме, находящегося на МКС или в Центре управления полетами. Некоторые типовые операции робот сможет выполнять самостоятельно.Как позднее рассказал гендиректор «Роскосмоса» Дмитрий Рогозин, на кадрах был показан габаритный макет, сделанный из пластика — полиамида. С его помощью специалисты должны проверить, как робота лучше разместить в корабле при транспортировке на МКС, а также провести эргономические исследования при выполнении совместных операций с космонавтами. По словам Рогозина, также изготавливается макет для испытаний в гидролаборатории, а действующий должен образец появиться в 2023 году, чтобы до отправки на станцию пройти испытания, в том числе на вибростенде и на электромагнитную совместимость.В 2019 году на орбите уже побывал робот Федор. На корабле «Союз МС-14» в центральном кресле командира корабля он прибыл на МКС, где его испытали российские космонавты Алексей Овчинин и Александр Скворцов. Робот поработал руками с отверткой, ключами и состыковал электрические соединители, а также включал дрель и протирал руки полотенцем. Кроме того, космонавты устроили допрос Федору, задав более 30 вопросов и записав на видео его ответы.FEDOR (позывной Skybot F-850) — антропоморфный робот-спасатель, разработанный НПО «Андроидная техника» и Фондом перспективных исследований по заказу МЧС России.
По словам Рогозина, также изготавливается макет для испытаний в гидролаборатории, а действующий должен образец появиться в 2023 году, чтобы до отправки на станцию пройти испытания, в том числе на вибростенде и на электромагнитную совместимость.В 2019 году на орбите уже побывал робот Федор. На корабле «Союз МС-14» в центральном кресле командира корабля он прибыл на МКС, где его испытали российские космонавты Алексей Овчинин и Александр Скворцов. Робот поработал руками с отверткой, ключами и состыковал электрические соединители, а также включал дрель и протирал руки полотенцем. Кроме того, космонавты устроили допрос Федору, задав более 30 вопросов и записав на видео его ответы.FEDOR (позывной Skybot F-850) — антропоморфный робот-спасатель, разработанный НПО «Андроидная техника» и Фондом перспективных исследований по заказу МЧС России.
https://ria.ru/20220111/robot-1767289527.html
луна
россия
РИА Новости
1
5
4.7
96
internet-group@rian. ru
ru
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
2022
РИА Новости
1
5
4.7
96
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
Новости
ru-RU
https://ria.ru/docs/about/copyright.html
https://xn--c1acbl2abdlkab1og.xn--p1ai/
РИА Новости
1
5
4.7
96
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
Новый российский дроид для открытого космоса
В «Роскосмосе» показали первые кадры того, как будет выглядеть новый российский дроид для открытого космоса
2022-02-07T16:44
true
PT0M51S
1920
1080
true
1920
1440
true
https://cdnn21.img.ria.ru/images/07e6/02/07/1771522121_240:0:1680:1080_1920x0_80_0_0_1a3b2defec5a51a10d5e2be54de9da1f. jpg
jpg
1920
1920
true
РИА Новости
1
5
4.7
96
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
РИА Новости
1
5
4.7
96
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
космос — риа наука, алексей овчинин, александр скворцов, луна, россия, фонд перспективных исследований, мчс россии (министерство рф по делам гражданской обороны, чрезвычайным ситуациям и ликвидации последствий стихийных бедствий), центр управления полетами, международная космическая станция (мкс), робот федор (fedor — final experimental demonstration object research)
Наука, Космос — РИА Наука, Алексей Овчинин, Александр Скворцов, Луна, Россия, Фонд перспективных исследований, МЧС России (Министерство РФ по делам гражданской обороны, чрезвычайным ситуациям и ликвидации последствий стихийных бедствий), Центр управления полетами, Международная космическая станция (МКС), Робот Федор (FEDOR — Final Experimental Demonstration Object Research)
МОСКВА, 7 фев — РИА Новости. «Роскосмос» впервые показал антропоморфного робота нового поколения «Теледроид», предназначенного для работ в открытом космосе. Фотографии и видео, а также 3D-модель робота выложили на сайте госкорпорации.
«Роскосмос» впервые показал антропоморфного робота нового поколения «Теледроид», предназначенного для работ в открытом космосе. Фотографии и видео, а также 3D-модель робота выложили на сайте госкорпорации.
Ранее сообщалось о планах запустить «Теледроид» на МКС в 2024 году. Эксперименты, которые предполагается провести с ним на станции, позволят получить задел для создания роботов, которые будут работать на Луне и окололунной орбите.
«Теледроид» внешне напоминает торс человека. Функционировать он будет в режиме аватара, копируя движения оператора в специальном костюме, находящегося на МКС или в Центре управления полетами. Некоторые типовые операции робот сможет выполнять самостоятельно.
Как позднее рассказал гендиректор «Роскосмоса» Дмитрий Рогозин, на кадрах был показан габаритный макет, сделанный из пластика — полиамида. С его помощью специалисты должны проверить, как робота лучше разместить в корабле при транспортировке на МКС, а также провести эргономические исследования при выполнении совместных операций с космонавтами.
© Фото : РоскосмосАнтропоморфный робот нового поколения «Теледроид»
© Фото : Роскосмос
Антропоморфный робот нового поколения «Теледроид»
По словам Рогозина, также изготавливается макет для испытаний в гидролаборатории, а действующий должен образец появиться в 2023 году, чтобы до отправки на станцию пройти испытания, в том числе на вибростенде и на электромагнитную совместимость.
В 2019 году на орбите уже побывал робот Федор. На корабле «Союз МС-14» в центральном кресле командира корабля он прибыл на МКС, где его испытали российские космонавты Алексей Овчинин и Александр Скворцов. Робот поработал руками с отверткой, ключами и состыковал электрические соединители, а также включал дрель и протирал руки полотенцем. Кроме того, космонавты устроили допрос Федору, задав более 30 вопросов и записав на видео его ответы.
FEDOR (позывной Skybot F-850) — антропоморфный робот-спасатель, разработанный НПО «Андроидная техника» и Фондом перспективных исследований по заказу МЧС России.
11 января, 11:08
Разработчик рассказал, что имя робота FEDOR родилось из шутки Рогозина
Антропоморфный робот. История и современность
Содержание страницы
Антропоморфный робот в семье роботов
Антропоморфный робот
– Что они изобрели? – спросил Клориндо. Всеведас откинулся на спинку кресла, словно хотел стать меньше и раствориться в тени.
– Они изобрели меня, – сказал он.
Стоя посреди зала, ярко освещенный прожектором, Клориндо смотрел на Всеведаса, сжавшегося в комок. Он отчетливо слышал каждое его слово, но отказывался понимать услышанное.
– Выходит, что ты… – пролепетал он.
– Так оно и есть. Выходит, что я – машина, изобретение людей, лучшая из когда-либо созданных моделей механического человека. А они, – Всеведас показал на пустой экран, – все они давным-давно умерли. Это были последние люди в Машиноградосе.

Марчелло Арджилли. Десять городов, 1970.

Давайте сначала определимся в терминологии.
Робот: механическое устройство, которое автоматически выполняет определенные задачи.
Слово “робот” было придумано в 1920 году чешским писателем Карелом Чапеком, который преобразовал значение “тяжелая работа” в слово “робот”.
Антропоморфный робот или андроид: механическое устройство — робот, напоминающее внешним видом и движениями человека (от греч. Anthropos — человек), термин, определяющий искусственных гуманоидных существ.
Казалось бы, создать робота, похожего на человека, настолько сложно, что это позволяют только технологии 20 века. Между тем оказывается, что первые попытки создать андроид относятся еще к средневековью!
Краткая история роботов
Некоторые начинают рассказывать историю о роботах с древних песочных часов, которые могли вращаться самостоятельно, или о летающим деревянном голубе, созданным Архитом Тарентским в 4 веке до нашей эры.
Архит Тарентский
Архит Тарентский (Архит из Таранто) — греческий философ, математик, астроном, политик и стратег (ок. 428 – 347 до н. Э.). Он был пифагорейцем, учеником Филолаоса. Он дружил с Платоном, они часто вместе вели научные диспуты.
Его интересовали конечность и бесконечность мира, склоняясь к идее, что он должен быть бесконечным. Он также был последователем мистической философии Пифагора, верил в путешествие душ. Он открыл свойства числа один, он, как известно, сводил все к числу. Он был предшественником геометрии — он написал научные трактаты по проблеме удвоения куба.
Антропоморфный робот. Деревянный голубь
Архит Тарентский также считается создателем механики. Он сконструировал, вероятно, самый старый образец человеческой изобретательности в области автоматов — деревянного голубя, который благодаря своему легкому и продуманному дизайну мог летать до 200 метров и приводился в движение сжатым воздухом. Это изобретение предшествовало идеям Леонардо да Винчи на два тысячелетия и было, возможно, самым ранним прототипом самолета.
Он был автором теории дисков и рычагов, ему также приписывают создание погремушки для детей.
Однако, фактически, только после Второй мировой войны были созданы экспериментальные устройства, которые мы назовем первыми роботами.
Это были, например, черепахоподобные машины, которые, передвигаясь на трех колесах, проникали в комнаты в поисках света. Они смогли избежать препятствий и убегали, когда свет был слишком сильным.
Джордж Девол и первый промышленный робот Unimate
Только в 1950-х годах Джордж Девол и Джо Энгельбергер создали первых роботов, пригодных для использования на заводах, а в 1962 году они начали сборку автомобилей на заводах General Motors (США).
Джо Энгельбергер
Также были построены игрушечные роботы, такие как механическая собачка на картинке ниже.
Антропоморфный робот
Построенный из бочки с маслом, Динамо Джо умел крутить педали и удерживать равновесие на велосипеде.
Антропоморфный робот Динамо Джо
Есть места, где уже сегодня широко используются роботы. На современном автоматизированном заводе вместо сотен рабочих есть только несколько операторов и рабочих, наблюдающих за работой машин. Роботы повторяют одни и те же движения с точностью и в тысячи раз и быстрее, чем люди. Стоят они дорого, но их работа дешевле человеческого труда, потому что кроме обслуживания и ремонта они ни в чем не нуждаются.
На современном автоматизированном заводе вместо сотен рабочих есть только несколько операторов и рабочих, наблюдающих за работой машин. Роботы повторяют одни и те же движения с точностью и в тысячи раз и быстрее, чем люди. Стоят они дорого, но их работа дешевле человеческого труда, потому что кроме обслуживания и ремонта они ни в чем не нуждаются.
Роботы заменяют людей везде, где для нас слишком много опасно. Роботы работают на атомных электростанциях, тушат пожары и действующие вулканы, проникая в кратеры (например, кратер вулкана Осмиононы Данте II на горе Спурр на Аляске), ныряют в глубины Мирового океана — например, в поисках затонувшего корабля “Титаник”.
Роботы Mini-Andros ищут бомбы, заложенные террористами, и эффективно обезвреживают или взрывают их.
Роботы космического агентства НАСА бродили по Марсу еще в 1998 году, а экспедиция астронавтов все еще остается в сфере мечты.
На Международной космической станции будет много рабочих мест для роботов, и автоматическое оборудование уже помогает ее строить. Одним словом, наступает эра роботов.
Одним словом, наступает эра роботов.
Антропоморфный робот и люди, которые его создавали
Антропоморфный робот
Между тем оказывается, что первые попытки создать антропоморфного робота — андроида относятся еще к средневековью!
Уже в тринадцатом веке философ и ученый Роджер Бэкон построил якобы говорящую голову, а епископ Регенсбурга, св. Альберт Великий (за счет тридцати лет работы) построил железного швейцара, который открывал и закрывал дверь и приветствовал посетителей, когда они входили.
Роджер Бэкон
Роджер Бэкон — английский философ и ученый (ок. 1214–1292). Первоначально он читал лекции в Париже, а примерно в середине XIII века он вступил в Орден францисканцев в Оксфорде — возможно, им руководили другие ученые того периода — основывая свои знания на философии Аристотеля.
Ему приписывают изобретение линзы и батискафа. Он разработал теорию выпуклого стекла, предсказал изобретение микроскопа и телескопа — некоторые считают, что он был их первым владельцем.
Он признан изобретателем, а точнее открывателем пороха для пушек. Еще в 1250 году он написал трактат о возможностях полета и безопасной посадки человека.
Роджер Бэкон в своей лаборатории
В своих книгах Роджер Бэкон описал свои необычные видения открытий и изобретений, далеко опередившие средневековую эпоху, и поэтому члены его ордена подозревали его в контакте с нечистыми силами.
В своем исследовании он использовал эксперимент — он постулировал, что полученные знания должны быть представлены в математической форме — его назвали доктором мирабилис. Его основные произведения: Opus maius (сборник знаний того времени в 7 частях), а также Opus minus и Opus tertium.
“Могут быть построены суда без гребцов, способные плавать как по рекам, так и по морям под управлением одного человека с большей скоростью, чем если бы они были полны гребцов.
Точно так же можно построить повозки, которые едут без использования тягловых животных, приводимые в движение невероятной энергией, как якобы ехали древние колесницы.
Летающие машины могут быть построены так, что человек, сидящий внутри машины, будет управлять им с помощью хитроумного механизма и летать по воздуху, как птица.
Кроме того, могут быть изготовлены устройства, хотя и небольшие, но достаточные для подъема или преодоления самых тяжелых грузов… Или устройства (аналогичные тем, которые сделаны по приказу Александра Македонского) могут быть сконструированы для ходьбы по воде или для ныряния… “.
Роджер Бэкон.

Роджер Бэкон построил одну из первых машин, так называемую “говорящую голову”.
Антропоморфный робот. Майлзу, помощнику Роджера Бэкона, противостоит Говорящая Голова
Самая старая сохранившаяся конструкция робота-гуманоида датируется 1495 годом. Это собрание рисунков Леонардо да Винчи, изображавших механического рыцаря, который мог сидеть, двигать руками, двигать головой и челюстью. Неизвестно, пытался ли Леонардо его построить.
В 1540 году итало-испанский часовщик, инженер и математик Торриано Джанелло сконструировал механическую женщину, играющую на мандолине — ее движения были обманчиво похожи на движения живых людей.
Итало-испанский часовщик, инженер и математик — Хуанело Турриано (1500 – 1585) родился в Кремоне. В возрасте 29 лет он переехал в Испанию – с тех пор он работал и жил в Толедо — столице Испании на тот момент. Его первой работой были Астрономические часы Кристаллино, построенные по просьбе Карла V.
Антропоморфный робот. Женщина с мандолиной
В 1540 году он сконструировал одного из первых в мире андроидов. Это была механическая женщина, играющая на мандолине — ее движения были обманчиво похожи на движения живых людей. Эта статуэтка в настоящее время находится в Музее изящных искусств (Kunsthistorisches Museum) в Вене.
Ему также приписывают создание антропоморфного робота под названием El Hombre de Palo. Это был монах (сделанный из дерева), который ходил по улице и просил пожертвования.
Антропоморфный робот. Монах для сбора пожертвований
Значительный вклад в развитие автоматизации внес также французский хирург и врач Амбруаз Паре, который изготовил сложные зубные протезы для своих пациентов.
Настоящий поток автоматов, имитирующих человеческие движения, произошел в 18 и начале 19 веков. Это были андроиды, которые играли, писали и рисовали.
Самыми популярными были автоматы Вольфганга фон Кемпелена. Одним из них был “Говорящий человек”, у которого в качестве легких был мех, а гортань была заменена трубкой с клапанами и жердями. Этот рукотворный человек произнес два предложения (на латыни и на французском), даже довольно четко, за исключением буквы “р”.
Во́льфганг фон Ке́мпелен
Вольфганг фон Кемпелен — австриец, родился в Братиславе, философ, юрист и инженер (1734 – 1804). В возрасте 36 лет он построил машину для игры в шахматы, позже известную как Kempelen Automat. Псевдо автомат в виде деревянной фигуры, о размере взрослого, был одет в традиционную турецкую одежду, что было очень модно в 18-м веке в Европе, бывшей в восторге от Востока.
В правой руке турок держал длинную трубку, из которой время от времени выходил дым. Его левая рука была свободна для перемещения шахматных фигур.
Антропоморфный робот. Шахматист Во́льфганга фон Ке́мпелена
Конструктор и его работа впервые поразили публику в Братиславе (тогда Пресбург) в 1769 году. Затем машина была продемонстрирована весной 1770 года в Вене в присутствии эрцгерцогини Австрийской Марии Терезии, а затем и многих других европейских странах.
Все, кто встречался с турком, приходили в ужас от его эффективности игры — из трехсот задокументированных партий “автомат” потерпел всего шесть поражений.
Предпринимались неоднократные попытки доказать, что автор машины — мошенник, но безуспешно. По просьбе зрителей создатель открывал все дверцы машины, вынул манекен из его одежды, показал его внутреннее убранство и т. д. Также было невозможно никому войти в него через люк, спрятанный в полу. Машина была на колесах!
В число соперников по шахматам входили Наполеон Бонапарт и Б. Франклин. Французская академия наук тоже попала в число игроков!
Как вы понимаете, в основании машины был спрятан шахматный мастер. Перемещение внутрь требовало от него необычайной ловкости. Открывая дверцу автомата, зрители не могли видеть ничего, кроме сотен различных рычажков, часов и т. д.
Перемещение внутрь требовало от него необычайной ловкости. Открывая дверцу автомата, зрители не могли видеть ничего, кроме сотен различных рычажков, часов и т. д.
Ручное управление не представляло большой проблемы, и фокус был в том, чтобы увидеть доску “снизу”. Это стало возможным благодаря магнитам, прикрепленным к тонким ниткам под шахматной доской. Когда шахматист брал фигуру, магнит падал, а когда он ставил ее обратно на доску, другой поднимался и “прилипал” к доске.
После смерти Кемпелена в 1804 году торговый автомат перешел из рук в руки, и публика все еще не могла раскрыть его секрет. Так продолжалось до 1820 года. В 1826 году новый владелец Иоганн Непомук Мельцель привез машину в США. В 1840 году машина была помещена в Китайский музей в Филадельфии, где сгорела четырнадцать лет спустя.
Антропоморфный робот. Разоблачение шахматного автомата
В конце концов, секреты работы машины были раскрыты Эдгаром Алланом По в статье “Шахматист Мельцеля”.
Кемпелен опубликовал множество работ по точной механике, а в 1791 году он сконструировал вторую в истории “говорящую машину” как часть машины для игры в шахматы. Он якобы изобрел пишущую машинку для слепых.
Он якобы изобрел пишущую машинку для слепых.
В 1738 году появился “Флейтист” Жака де Вокансона, сыгравшего 12 мелодий — поток воздуха регулировался движениями искусственного языка, губ и пальцев флейтиста. Год спустя тот же дизайнер построил “The Tamerine Player”.
Жак де Вокансон
Жак де Вокансон — французский изобретатель, символ современного инженера эпохи Просвещения (1709-1782).
Он был сыном перчаточника из Гренобля, учеником иезуитов и послушником в Ордене Братьев Наименьших.
Но больше всего он был производителем механических автоматов. Как францисканец, он построил устройство для автоматического перелистывания страниц Евангелия и движущиеся фигуры ангелов.
Жак де Вокансон также построил слугу, который подавал обед во время визита одного из религиозных деятелей. Это не встретило одобрения, конструктора даже обвинили в запятнании святости и это был близок к тому, чтобы стать его последним автоматом — ему приказали уничтожить мастерскую и станки.
Антропоморфный робот. Флейтист
Флейтист
Он представил свой первый зрелый автомат — флейтиста Академии наук в 1738 году. Механический музыкант в натуральную величину мог сыграть двенадцать мелодий и имел огромный успех, несмотря на то, что стоимость входного билета была эквивалентна зарплате среднего рабочего в то время.
За флейтистом могли наблюдать максимум десять посетителей, которым автомат лично демонстрировал конструктор. Позже он сконструировал игрока в бубен.
Антропоморфный робот. Механическая утка Жака де Вокансона
Самым известным его сооружением была утка. Механическая птица состояла из более чем тысячи частей и появилась в 1739 году. Использование гибких резиновых трубок для “желудочно-кишечного тракта” было абсолютно инновационным.
Утка могла плавать в воде, есть, выделять, крякать и чистить перья. Это правда, что выделения не были результатом переваривания зерен автоматом — как утверждал конструктор — но поддельное гуано, сделанное из зеленого хлеба, восхищало людей того времени, в том числе короля Людовика XV.
В 1743 году он продал все три машины. Флейтист и игрок в бубен были уничтожены в ходе Французской революции, а Утка попала в Германию, а затем в музей в Нижнем Новгороде, где сгорела во время пожара 1879 года.
Антропоморфный робот
Жак де Вокансон оказал значительное влияние на физику (в основном механику) и естественные науки. Он также сделал много других значительных изобретений, в т.ч. изобрел цепочку из проволочных люверсов (цепь Вокансона) и автоматизированный ткацкий станок. Его считают одним из отцов современного ткачества. Его конструкции (автоматы, программирование ткацких мастерских) также относятся к истории информатики.
В 1741 году он начал работать инспектором французской шелковой промышленности, которую он полностью реорганизовал в условиях жесткой конкуренции со стороны Англии и Шотландии. Он улучшил сам производственный процесс, а также усовершенствовал бывшее в употреблении оборудование.
Он использовал перфокарты М. Фалькона для автоматизации производства, позже заменил их на специально подготовленный металлический цилиндр, использование которого давало возможность выполнять определенные операции циклически. В 1746 году он стал членом Французской академии наук. Вольтер называл его новым Прометеем.
В 1746 году он стал членом Французской академии наук. Вольтер называл его новым Прометеем.
В 1771 году венец Фридрих фон Кнаус сделал три головы, издающие человеческие звуки, а также фигуру музыканта, играющего на флейте.
Спустя год был создан самый близкий к идеалу из сегодняшних роботов — “Писатель”, имевший программируемые входы памяти!
Пьер Жаке-Дро
Его создателем был Пьер Жаке-Дро, чьи человекоподобные роботы уже имели важные компоненты современных роботов: источник энергии (заводной пружинный механизм), механизм передачи движения конечностям (скрытые рычаги, шестерни и кулачки) и блок управления (управление осуществлялось цилиндрами с воткнутыми штифтами, аналогичными используемым, например, в музыкальных шкатулках).
Пьер Жаке-Дро — швейцарский ювелир, изобретатель, часовщик и купец (1721 – 1790). Помимо изготовления произведений искусства и механики (он сделал часы со свистком с движущимся поршнем, благодаря которому свисток прекрасно имитирует пение птиц), он стал известен как конструктор андроидов – сложных машин, которые могут делать такие вещи, как живые организмы.
Его лучшим созданием, завершенным в 1772 году, был Writer: L’Ecrivain (Писатель), состоящий из шести тысяч частей, снабженный пером и чернилами. Машина могла написать любое предложение из сорока символов. Одним из таких предложений была декартова сумма Cogito ergo. В других случаях автомат позволял себе сомневаться и царапал фразу: “Я не думаю… Значит, меня не существует?”
Антропоморфный робот. Работы Пьера Жаке-Дро
Время от времени он окунал перо в чернильницу и встряхивал ее, чтобы не запачкать бумагу. Он следил за текстом глазами. Мозг писателя — это механический компьютер, который по-прежнему впечатляет своей сложностью даже по сегодняшним меркам.
Антропоморфный робот
Его работами также являются La musicienne — Музыкант (который играет на органе, нажимая на клавиши пальцами, двигает грудью, двигает глазами, головой и, двигая туловищем, кланяется после игры) и Le dessinateur — Draftsman — кукла, которая делает четыре карандашных рисунка: портрет Людовика XV, Людовика XVI, королевы Марии-Антуанетты, собаки с надписью “Моя собака” и Купидона на колеснице, запряженной бабочкой. Во время “работы” рисовальщик ртом сдувает карандашную пыль с листа.
Во время “работы” рисовальщик ртом сдувает карандашную пыль с листа.
Антропоморфный робот “Писатель”:
Мастерство изготовления механических куколок очаровывал королей и императоров Европы, Китая, Индии и Японии. Куклы работают и функционируют по сей день, их можно увидеть в музее искусства и истории в Невшателе, Швейцария.
Альберт Магнус
Слово андроид было придумано немецким философом и алхимиком Альбертом Магнусом около 1727 года, который также работал над созданием искусственного механического существа.
Антропоморфный робот в наши дни
Антропоморфный робот Федор. Россия
Создание машины, похожей на живой организм, в наши дни также является огромной проблемой. Самые дорогие и технологически продвинутые конструкции Android все еще очень и очень далеки от физической и психологической пригодности. Тем не менее, люди борются с этой проблемой, и результаты их усилий становятся все более удивительными.
Тем не менее, люди борются с этой проблемой, и результаты их усилий становятся все более удивительными.
Антропоморфный робот Sony Android SDR-4X
В настоящее время многие известные компании инвестируют в производство развлекательных роботов, полагая, что в будущем каждый захочет иметь дома удобный автомат, облегчающий жизнь.
Одна из них — Sony, которая недавно представила Android SDR-4X, который может ходить, танцевать, распознавать лица людей, которых она встречает, и говорить. К сожалению, это довольно дорогое удовольствие — стоит столько же, сколько роскошный автомобиль.
Антропоморфный робот. SURALP
В 2010 году турецкие ученые показали двуногого робота их конструкции — SURALP, который весит 114 килограммов, имеет рост 164 сантиметра, имеет 29 суставов (1 на груди, 2 на шее и 12 на конечностях) и если он теряет равновесие, его придерживают за корпус.
Антропоморфный робот может отвечать “да” и “нет” на простые вопросы и давать невербальный ответ, качая головой. На создание SURALP ушло 8 лет и около миллиона долларов.
Конструкторы НАСА дорабатывают Робонавта — андроида, который выйдет в опасное пространство и займется обслуживанием и ремонтом станции извне.
Один из наиболее технологически продвинутых — женский антропоморфный робот андроид, созданный японскими учеными, под названием Repliee Q1.
Антропоморфный робот. Хироси Исигуру со своим детищем
Антропоморфный робот может двигать руками и даже моргать, как человек. Специальные сенсоры заставляют андроид “дышать”.
Его кожа сделана из чрезвычайно пластичного силикона, очень похожего по свойствам на человеческую кожу.
Создателем Repliee Q1, который может взаимодействовать с людьми и реагировать на человеческое прикосновение, является профессор Хироси Исигуру из Университета Осаки. Профессор сказал, что “однажды роботы станут настолько совершенными, что их не составит труда принять за человека из плоти и крови”.
Глядя на видео ниже, с ним невозможно не согласиться.
 ru%2Fistoriya%2Fantropomorfnyj-robot.html» frameborder=»0″ webkitallowfullscreen=»» mozallowfullscreen=»» allowfullscreen=»»>
ru%2Fistoriya%2Fantropomorfnyj-robot.html» frameborder=»0″ webkitallowfullscreen=»» mozallowfullscreen=»» allowfullscreen=»»>
Посмотрите, как антропоморфный робот умеет танцевать:
А вы хотели бы, чтобы у вас был домашний антропоморфный робот?
Это самая удивительная рука биомиметического антропоморфного робота, которую мы когда-либо видели
Как понял Верн, Гражданская война в США (во время которой
было выполнено 60 000 ампутаций) положило начало современной эре протезирования в Соединенных Штатах благодаря федеральному финансированию и волне патентов на дизайн, поданных протезистами-предпринимателями. Две мировые войны укрепили коммерческую индустрию протезирования как в Соединенных Штатах, так и в Западной Европе, а продолжающаяся война с терроризмом помогла ей превратиться в индустрию с оборотом в 6 миллиардов долларов США по всему миру. Однако эти недавние инвестиции не являются результатом непропорционально большого количества ампутаций в ходе военных конфликтов: около 1500 американских солдат и 300 британских солдат лишились конечностей в Ираке и Афганистане. Потеря конечностей среди населения в целом затмевает эти цифры. Только в Соединенных Штатах более 2 миллионов человек живут с потерей конечностей, при этом 185 000 человек ежегодно подвергаются ампутации. Гораздо меньшее число детей — от 1500 до 4500 детей в год — рождаются с разницей или отсутствием конечностей, включая меня.
Однако эти недавние инвестиции не являются результатом непропорционально большого количества ампутаций в ходе военных конфликтов: около 1500 американских солдат и 300 британских солдат лишились конечностей в Ираке и Афганистане. Потеря конечностей среди населения в целом затмевает эти цифры. Только в Соединенных Штатах более 2 миллионов человек живут с потерей конечностей, при этом 185 000 человек ежегодно подвергаются ампутации. Гораздо меньшее число детей — от 1500 до 4500 детей в год — рождаются с разницей или отсутствием конечностей, включая меня.
Сегодня люди, разрабатывающие протезы, как правило, инженеры с добрыми намерениями, а не сами инвалиды. Мясистые обрубки мира служат хранилищем мечтаний этих дизайнеров о высокотехнологичном, сверхчеловеческом будущем. Я знаю это, потому что на протяжении всей своей жизни я был оснащен одними из самых
самые передовые протезы на рынке. После рождения без левого предплечья я был одним из первых младенцев в Соединенных Штатах, которым снабдили миоэлектрическим протезом руки — электронным устройством, управляемым мышцами носителя, напрягающимися от датчиков внутри гнезда протеза. С тех пор я носил множество протезов рук, каждый из которых стремился к идеальному воспроизведению человеческой руки — иногда за счет эстетики, иногда за счет функциональности, но всегда предназначенный для имитации и замены того, что отсутствовало.
С тех пор я носил множество протезов рук, каждый из которых стремился к идеальному воспроизведению человеческой руки — иногда за счет эстетики, иногда за счет функциональности, но всегда предназначенный для имитации и замены того, что отсутствовало.
За время моей жизни миоэлектрические руки превратились из когтеобразных конструкций в мультизахватные, программируемые, анатомически точные копии человеческой руки, большинство из которых стоит десятки тысяч долларов. Журналисты не могут налюбоваться этими изощренными, многоцелевыми «бионическими» руками с реалистичной силиконовой кожей и органическими движениями, негласно обещая, что инвалидность скоро исчезнет, а любая потерянная конечность или орган будет заменена равноценной копией. Инновации в области протезов рук рассматриваются как соревнование с высокими ставками, чтобы увидеть, что технологически возможно. Тайлер Хейс, генеральный директор стартапа по производству протезов
Atom Limbs изложила это в видео WeFunder, которое помогло собрать 7,2 миллиона долларов от инвесторов: «Каждый лунный полет в истории начинался с изрядной доли сумасшествия, от электричества до космических путешествий, и Atom Limbs ничем не отличается».
Мы вовлечены в гонку бионических рук. Но делаем ли мы реальный прогресс? Пришло время спросить, для кого на самом деле нужны протезы и чего они, как мы надеемся, на самом деле сделают. Каждая новая бионическая рука с несколькими захватами имеет тенденцию быть более сложной, но и более дорогой, чем предыдущая, и с меньшей вероятностью покрывается (даже частично) страховкой. И, как показывают недавние исследования, гораздо более простые и гораздо менее дорогие протезы могут одинаково хорошо выполнять многие задачи, а причудливые бионические руки, несмотря на все их электронные возможности, редко используются для хватания.
Активные руки, такие как этот, изготовленный протезной фирмой Arm Dynamics, дешевле и долговечнее, чем бионические протезы. Насадка от компании Texas Assistive Devices, производящей протезы, рассчитана на очень большой вес, что позволяет автору выполнять упражнения, которые были бы рискованными или невозможными с ее гораздо более дорогой бибионической рукой. Габриэла Хасбун; Макияж: Мария Нгуен для косметики MAC; Волосы: Джоан Лаки для Living Proof
Габриэла Хасбун; Макияж: Мария Нгуен для косметики MAC; Волосы: Джоан Лаки для Living Proof
Function or Form
В последние десятилетия подавляющее внимание исследований и разработок новых искусственных рук было сосредоточено на совершенствовании различных типов захватов. Многие из самых дорогих рук на рынке отличаются количеством и разнообразием выбираемых цепких захватов. Мой собственный медиа-любимец руки, bebionic от Ottobock, который я получил в 2018 году, имеет силовую рукоятку в форме кулака, щипковые рукоятки и один очень специфический режим с большим пальцем поверх указательного для вежливой передачи кредитной карты. Моя миоэлектрическая рука 21-го века казалась замечательной, пока я не попытался использовать ее для некоторых рутинных задач, где она оказалась
еще громоздко и занимает много времени, чем если бы я просто оставил его на диване. Я не мог использовать его, чтобы закрыть дверь, например, задача, которую я могу сделать с моей культей.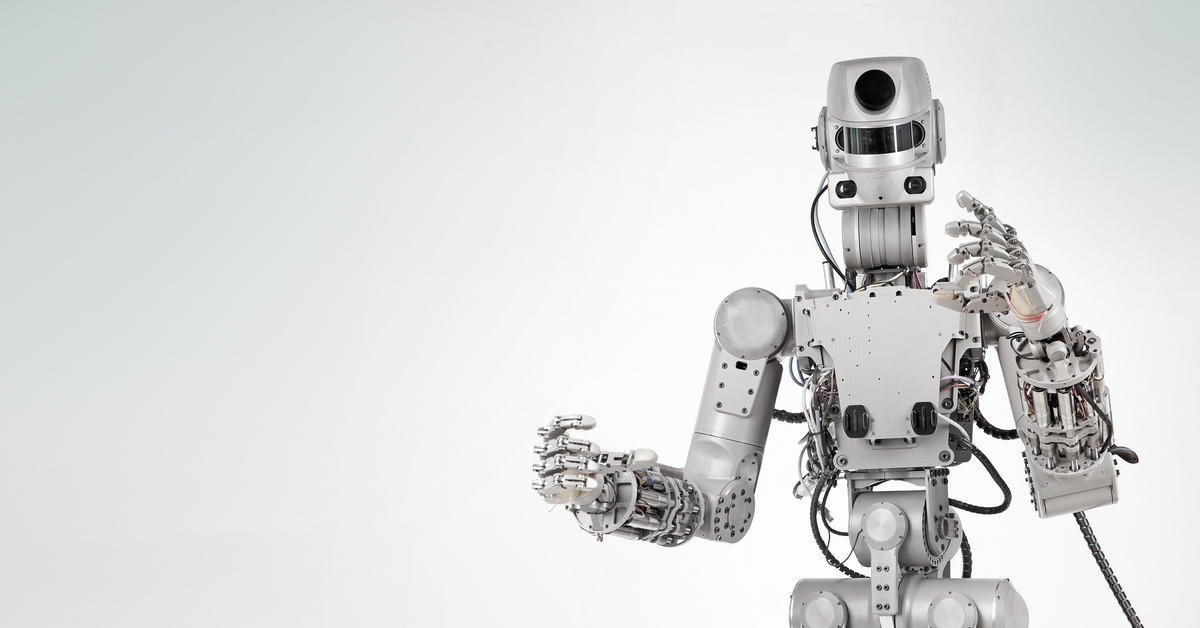 А без чрезвычайно дорогого дополнения в виде запястья с электроприводом я не мог пересыпать овсянку из кастрюли в миску. Выполнение задач крутым бионическим способом, даже если это имитировало две руки, было явно не лучше, чем выполнение вещей по-моему, иногда с помощью моих ног и ступней.
А без чрезвычайно дорогого дополнения в виде запястья с электроприводом я не мог пересыпать овсянку из кастрюли в миску. Выполнение задач крутым бионическим способом, даже если это имитировало две руки, было явно не лучше, чем выполнение вещей по-моему, иногда с помощью моих ног и ступней.
Когда я впервые заговорил с
Эд Спирс, лектор по робототехнике и машинному обучению в Имперском колледже Лондона, был в своем кабинете поздно ночью, но его все еще волновали роботизированные руки — нынешнее направление его исследований. Спайерс говорит, что антропоморфная роботизированная рука неизбежна, от реальности сегодняшнего протезирования до фантазии научной фантастики и аниме. «На одной из своих первых лекций здесь я показывал отрывки из фильмов и мультфильмов и то, как крутые кинематографисты делают руки роботов», — говорит Спирс. «В аниме Gundam , есть так много крупных планов гигантских рук роботов, хватающих такие вещи, как массивные пушки. Но почему это должна быть человеческая рука? Почему у робота просто нет пистолета вместо руки?»
Пришло время спросить, для кого на самом деле нужны протезы и чего они, как мы надеемся, на самом деле сделают.
Спирс считает, что разработчики протезов слишком увлечены формой, а не функцией. Но он поговорил с ними достаточно, чтобы понять, что они не разделяют его точку зрения: «У меня такое ощущение, что людям нравится идея о том, что люди великие, и что руки делают людей совершенно уникальными». Почти каждый университетский факультет робототехники, который посещает Спирс, занимается разработкой антропоморфных роботов. «Вот как выглядит будущее», — говорит он, и его голос звучит немного раздраженно. «Но часто есть лучшие способы».
Подавляющее большинство людей, пользующихся протезами конечностей, — это люди с односторонней ампутацией — люди с ампутациями, затрагивающими только одну сторону тела, — и они практически всегда используют свою доминирующую «мясистую» руку для деликатных задач, таких как поднятие чашки. Как односторонние, так и двусторонние ампутированные конечности также получают помощь от своего туловища, ступней и других объектов в их окружении; редко задачи выполняются одним протезом.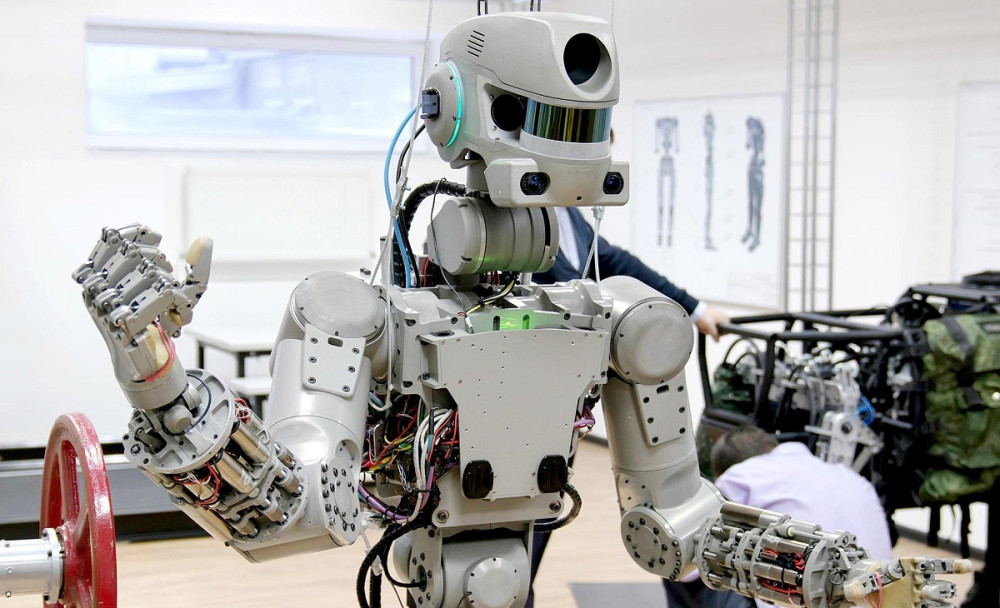 И все же, общие клинические оценки для определения успеха протеза основаны на использовании только протеза без помощи других частей тела. Такие оценки, похоже, предназначены для демонстрации возможностей протеза руки, а не для определения того, насколько он полезен в повседневной жизни пользователя. Инвалиды по-прежнему не являются арбитрами стандартов протезирования; мы все еще не в центре дизайна.
И все же, общие клинические оценки для определения успеха протеза основаны на использовании только протеза без помощи других частей тела. Такие оценки, похоже, предназначены для демонстрации возможностей протеза руки, а не для определения того, насколько он полезен в повседневной жизни пользователя. Инвалиды по-прежнему не являются арбитрами стандартов протезирования; мы все еще не в центре дизайна.
Крюк Хосмера [слева], первоначально разработанный в 1920 году, представляет собой оконечное устройство с питанием от тела, которое используется до сих пор. Насадка-молоток [справа] может быть более эффективной, чем насадка-захват, при забивании гвоздей в дерево. Слева: Джон Прието/The Denver Post/Getty Images; Справа: Hulton-Deutsch Collection/Corbis/Getty Images
Протезы в реальном мире
Чтобы узнать, как пользователи протезов живут со своими устройствами,
Спирс руководил исследованием, в котором использовались камеры, надетые на головы участников, для записи ежедневных действий восьми человек с односторонней ампутацией или врожденными различиями конечностей. Исследование, опубликованное в прошлом году в IEEE Transactions on Medical Robotics and Bionics , включал несколько разновидностей миоэлектрических рук, а также систем с питанием от тела, которые используют движения плеча, груди и плеча, передаваемые по кабелю, для механического управления захватом в конце протез. Исследование проводилось, когда Спирс был научным сотрудником лаборатории GRAB Йельского университета, возглавляемой Аароном Долларом. Помимо Доллара, он тесно сотрудничал с аспиранткой Джиллиан Кокран, которая была соавтором исследования.
Исследование, опубликованное в прошлом году в IEEE Transactions on Medical Robotics and Bionics , включал несколько разновидностей миоэлектрических рук, а также систем с питанием от тела, которые используют движения плеча, груди и плеча, передаваемые по кабелю, для механического управления захватом в конце протез. Исследование проводилось, когда Спирс был научным сотрудником лаборатории GRAB Йельского университета, возглавляемой Аароном Долларом. Помимо Доллара, он тесно сотрудничал с аспиранткой Джиллиан Кокран, которая была соавтором исследования.
Просматривая необработанные кадры из исследования, я чувствовал одновременно грусть и чувство товарищества с анонимными пользователями протезов. На роликах видны неуклюжесть, просчеты и случайные падения, знакомые даже очень опытным пользователям протезов рук. Часто протез просто помогает прижать объект к телу, которым можно управлять другой рукой. Также было очевидно, сколько времени люди тратили на подготовку своих миоэлектрических протезов для выполнения задачи — часто требовалось несколько дополнительных секунд, чтобы вручную или с помощью электроники повернуть запястья своих устройств, выровнять объект, чтобы правильно схватить его, и отработать захват. подход. Участник, который повесил бутылку с дезинфицирующим спреем на «крючок» руки, протирая кухонный стол, казалось, был тем, кто все понял.
подход. Участник, который повесил бутылку с дезинфицирующим спреем на «крючок» руки, протирая кухонный стол, казалось, был тем, кто все понял.
В ходе исследования протезы использовались в среднем только для 19 процентов всех зафиксированных манипуляций. В целом протезы использовались в основном для нехватательных действий, а другая, «неповрежденная» рука выполняла большую часть хватания. Исследование выявило большие различия в использовании между теми, у кого неэлектрические протезы с питанием от тела, и теми, у кого есть миоэлектрические протезы. Для пользователей протезов с приводом от тела, у которых ампутация была ниже локтя, почти 80 процентов использования протезов приходилось на движения без захвата — толкание, нажатие, вытягивание, подвешивание и стабилизация. Для миоэлектрических пользователей устройство использовалось для захвата только в 40 процентах случаев.
Что еще более показательно, пользователи с неэлектрическими захватами или разъемными крюками тратили значительно меньше времени на выполнение задач, чем пользователи с более сложными протезами. Спайерс и его команда отметили плавность и скорость, с которой первые приступили к выполнению задач в своих домах. Они могли использовать свои искусственные руки почти мгновенно и даже получать прямую тактильную обратную связь через кабель, который управляет такими системами. Исследование также выявило небольшую разницу в использовании между миоэлектрическими устройствами с одним захватом и более причудливыми миоэлектрическими многошарнирными руками с несколькими захватами, за исключением того, что пользователи, как правило, избегали подвешивания предметов на своих руках с несколькими захватами, по-видимому, из страха сломать их.
Спайерс и его команда отметили плавность и скорость, с которой первые приступили к выполнению задач в своих домах. Они могли использовать свои искусственные руки почти мгновенно и даже получать прямую тактильную обратную связь через кабель, который управляет такими системами. Исследование также выявило небольшую разницу в использовании между миоэлектрическими устройствами с одним захватом и более причудливыми миоэлектрическими многошарнирными руками с несколькими захватами, за исключением того, что пользователи, как правило, избегали подвешивания предметов на своих руках с несколькими захватами, по-видимому, из страха сломать их.
«У нас сложилось впечатление, что люди с миоэлектрическими руками с несколькими хватами довольно осторожно подходят к их использованию», — говорит Спирс. Это неудивительно, поскольку большинство миоэлектрических рук стоят более 20 000 долларов, редко получают одобрение страховки, требуют частой профессиональной поддержки для изменения схемы хвата и других настроек, а также требуют дорогостоящих и длительных процессов ремонта.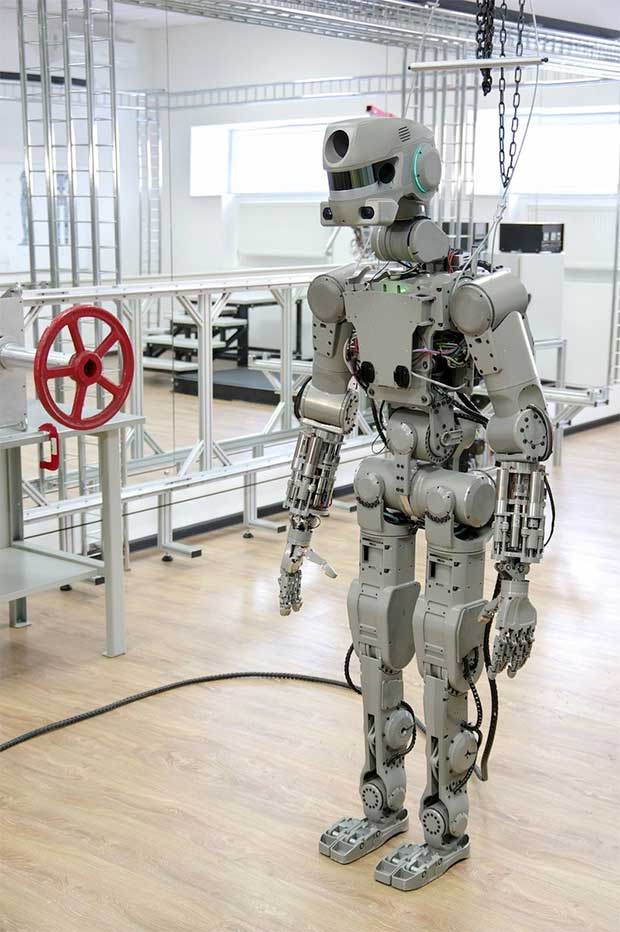 По мере того, как протезные технологии становятся все более сложными и запатентованными, все большую озабоченность вызывает долгосрочная работоспособность. В идеале устройство должно легко ремонтироваться пользователем. И все же некоторые стартапы в области протезирования предлагают модель подписки, при которой пользователи продолжают платить за доступ к ремонту и поддержке.
По мере того, как протезные технологии становятся все более сложными и запатентованными, все большую озабоченность вызывает долгосрочная работоспособность. В идеале устройство должно легко ремонтироваться пользователем. И все же некоторые стартапы в области протезирования предлагают модель подписки, при которой пользователи продолжают платить за доступ к ремонту и поддержке.
Несмотря на выводы своего исследования, Спирс говорит, что подавляющее большинство исследований и разработок в области протезирования по-прежнему сосредоточено на совершенствовании способов захвата дорогих высокотехнологичных бионических рук. По его словам, даже помимо протезирования исследования манипуляций в исследованиях приматов и робототехники в подавляющем большинстве связаны с хватанием: «Все, что не хватает, просто выбрасывается».
TRS производит широкий ассортимент протезов с приводом от тела для различных хобби и занятий спортом. Каждое приспособление предназначено для определенной задачи, и их можно легко заменить для различных видов деятельности.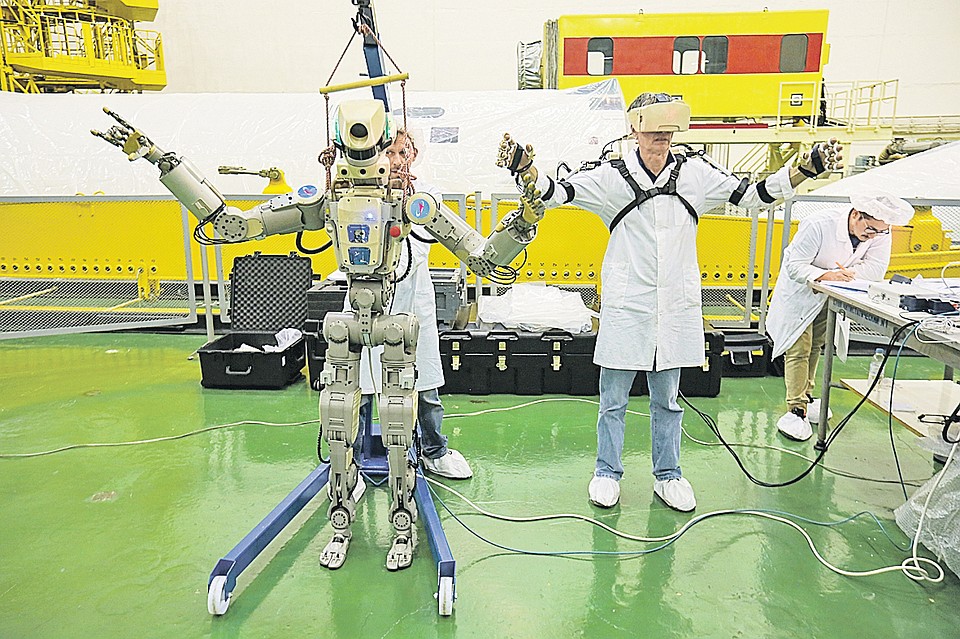 Fillauer TRS
Fillauer TRS
Хватаясь за историю
Если мы решили, что то, что делает нас людьми, — это наши руки, а то, что делает руку уникальной, — это ее способность хватать, то единственный протез, который у нас есть, — это тот, который прикреплен к запястьям большинства людей. Тем не менее, погоня за максимальной пятизначной хваткой не обязательно является следующим логическим шагом. Фактически, история показывает, что люди не всегда были зациклены на идеальном воссоздании человеческой руки.
Как рассказывается в сборнике эссе 2001 г.
Письмо на руках: память и знания в Европе раннего Нового времени , представления о руке развивались на протяжении столетий. «Душа подобна руке; ибо рука есть орудие инструментов», — писал Аристотель в De Anima . Он полагал, что человечество было намеренно наделено подвижной и цепкой рукой, потому что только наш уникально разумный мозг мог использовать ее — не как простую утварь, а как инструмент для apprehensio , или «схватывания» мира в прямом и переносном смысле.
Спустя более 1000 лет идеи Аристотеля нашли отклик у художников и мыслителей эпохи Возрождения. Для Леонардо да Винчи рука была посредником между мозгом и миром, и он приложил исключительные усилия в своих анализах и иллюстрациях человеческой руки, чтобы понять ее основные компоненты. Его тщательные исследования сухожилий и мышц предплечья и кисти привели его к выводу, что «хотя человеческая изобретательность делает различные изобретения… она никогда не найдет изобретений более красивых, более подходящих или более прямых, чем природа, потому что в ее изобретениях нет ничего недостающего и ничего лишнего».
Иллюстрации да Винчи вызвали волну интереса к анатомии человека. Тем не менее, при всем тщательном изображении человеческой руки европейскими мастерами, рука рассматривалась скорее как источник вдохновения, чем как объект, который простые смертные могли воспроизвести. На самом деле было широко признано, что хитросплетения человеческой руки свидетельствуют о божественном замысле. Никакая машина, заявил христианский философ Уильям Пейли, не является «более искусственной или более очевидной», чем сгибатели руки, что предполагает преднамеренный замысел Бога.
Никакая машина, заявил христианский философ Уильям Пейли, не является «более искусственной или более очевидной», чем сгибатели руки, что предполагает преднамеренный замысел Бога.
Выполнение задач крутым бионическим способом, даже если это имитировало две руки, было явно не лучше, чем выполнение вещей по-моему, иногда с помощью моих ног и ступней.
К середине 1700-х годов, когда на глобальном севере произошла промышленная революция, начал формироваться более механистический взгляд на мир, и грань между живыми существами и машинами начала стираться. В своей статье 2003 года «
Wetware восемнадцатого века, — пишет Джессика Рискин, профессор истории Стэнфордского университета, — период между 1730-ми и 1790s был симуляцией, в которой механики искренне пытались сократить разрыв между живыми и искусственными механизмами». В этот период произошли значительные изменения в конструкции протезов конечностей. В то время как механические протезы 16-го века были отягощены железом и пружинами, в протезе 1732 года с приводом от тела использовалась система шкивов для сгибания руки, сделанной из легкой меди. К концу 18 века металл заменили кожей, пергаментом и пробкой — более мягкими материалами, имитирующими живую материю.
К концу 18 века металл заменили кожей, пергаментом и пробкой — более мягкими материалами, имитирующими живую материю.
Технооптимизм начала 20-го века привел к очередным изменениям в дизайне протезов.
Вольф Швейцер, патологоанатом Цюрихского института судебной медицины, человек с ампутированными конечностями. Он владеет широким спектром современных протезов рук и имеет необходимый опыт для их тестирования. Он отмечает, что анатомически правильные протезы рук вырезались и выковывались на протяжении большей части 2000 лет. И все же, по его словам, разрезной крючок 20-го века с приводом от тела «более современен», его конструкция больше стремится сломать форму человеческой руки.
«Рука, приводимая в действие телом, — с точки зрения ее символизма — (по-прежнему) выражает человеко-машинный символизм индустриального общества 1920-х годов».
пишет Швейцер в своем блоге о протезах рук, «когда человек должен был функционировать как заводная шестерня на производственных линиях или в сельском хозяйстве». В оригинальном дизайне крючка Хосмера 1920-х годов петля внутри крючка была помещена только для завязывания обуви, а другая — только для удержания сигарет. Эти дизайны, как сказал мне Ad Spiers, были «невероятно функциональными, функциональность превыше формы. Все части служили определенной цели».
В оригинальном дизайне крючка Хосмера 1920-х годов петля внутри крючка была помещена только для завязывания обуви, а другая — только для удержания сигарет. Эти дизайны, как сказал мне Ad Spiers, были «невероятно функциональными, функциональность превыше формы. Все части служили определенной цели».
Швейцер считает, что по мере того, как в 20-м веке потребность в ручном труде уменьшалась, протезы, которые были высокофункциональными, но не натуралистичными, затмились новым высокотехнологичным видением будущего: «бионическими» руками. В 2006 году Агентство перспективных оборонных исследовательских проектов США запустило
Революционное протезирование, исследовательская инициатива по разработке следующего поколения протезов рук с «почти естественным» контролем. В рамках программы стоимостью 100 миллионов долларов были созданы два многошарнирных протеза руки (один для исследований, а другой стоимостью более 50 000 долларов). Что еще более важно, это повлияло на создание других подобных протезов, сделав бионическую руку — как ее представляли себе военные — святым Граалем в протезировании.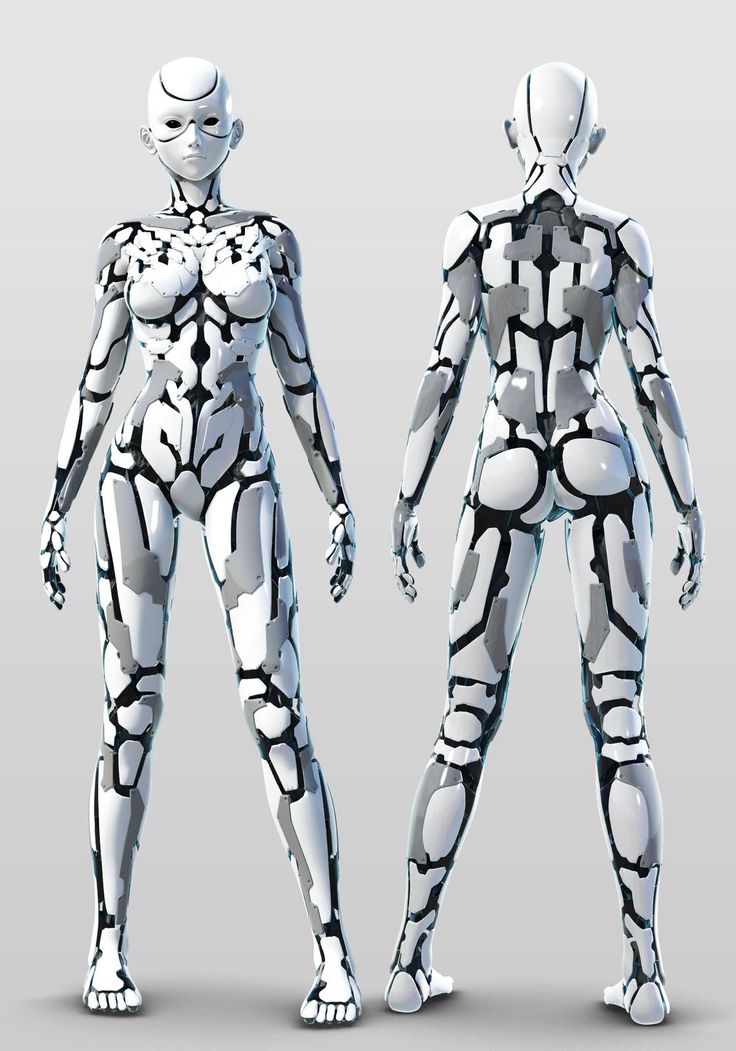 Сегодня бионическая рука с несколькими захватами является гегемоном, символом целостности киборга.
Сегодня бионическая рука с несколькими захватами является гегемоном, символом целостности киборга.
И все же некоторые разработчики протезов придерживаются другого видения. TRS, базирующаяся в Боулдере, штат Колорадо, является одним из немногих производителей
протезы для конкретных видов деятельности, которые часто более долговечны и более доступны с финансовой точки зрения, чем роботизированные протезы. Эти пластмассовые и силиконовые насадки, в том числе мягкое устройство в форме гриба для отжиманий, храповой зажим для поднятия тяжестей и вогнутый плавник для плавания, помогли мне ощутить наибольшую функциональность, которую я когда-либо получал от протеза руки. .
Такие низкотехнологичные протезы для активности и протезы с питанием от тела работают на удивление хорошо, а стоимость бионических рук составляет ничтожную долю. Они не выглядят и не действуют как человеческие руки, и от этого они функционируют лучше. Согласно Швейцеру, протезы с приводом от тела
инженеры регулярно называют его «мистическим» или насмешливо называют «капитаном Крюком». Будущие бионические плечи и локти могут иметь огромное значение в жизни людей, у которых отсутствует конечность до плеча, если предположить, что эти устройства можно будет сделать надежными и доступными. Но для Швейцера и большого процента пользователей, неудовлетворенных своими миоэлектрическими протезами, индустрия протезов еще не предложила ничего принципиально лучшего или более дешевого, чем протезы с питанием от тела.
Будущие бионические плечи и локти могут иметь огромное значение в жизни людей, у которых отсутствует конечность до плеча, если предположить, что эти устройства можно будет сделать надежными и доступными. Но для Швейцера и большого процента пользователей, неудовлетворенных своими миоэлектрическими протезами, индустрия протезов еще не предложила ничего принципиально лучшего или более дешевого, чем протезы с питанием от тела.
Прорывы, которых мы хотим
Бионические руки стремятся сделать людей с ограниченными возможностями «цельными», чтобы мы участвовали в мире, который в культурном отношении двурукий. Но гораздо важнее, чтобы мы жили так, как хотим, с доступом к необходимым нам инструментам, чем чтобы мы выглядели как все. В то время как многие люди с разными конечностями использовали бионические руки для взаимодействия с миром и самовыражения, многовековые усилия по совершенствованию бионической руки редко сосредотачиваются на нашем жизненном опыте и том, что мы хотим делать в своей жизни.
Нам обещали прорыв в технологии протезирования на протяжении большей части 100 лет. Мне вспоминается научный ажиотаж вокруг выращенного в лаборатории мяса, который кажется одновременно взрывным сдвигом и признаком интеллектуальной капитуляции, когда политические и культурные изменения игнорируются в пользу технологического исправления. С персонажами в мире протезирования — врачами, страховыми компаниями, инженерами, протезистами и военными — которые десятилетиями играют одни и те же роли, почти невозможно создать что-то действительно революционное.
Между тем, эта метафорическая гонка на Луну — это миссия, которая забыла о своей первоначальной цели: помочь людям с ограниченными возможностями приобретать и использовать инструменты, которые они хотят. Есть недорогие, доступные, низкотехнологичные протезы, которые доступны прямо сейчас и требуют инвестиций в инновации для дальнейшего снижения затрат и улучшения функциональности. И, по крайней мере, в Соединенных Штатах существует сломанная система страхования, которую необходимо починить. Освобождение себя от гонки бионических ручных вооружений может открыть возможности более функциональных конструкций, которые будут более полезными и доступными, и могут помочь нам вернуть наши устремления в области протезирования на землю.
Освобождение себя от гонки бионических ручных вооружений может открыть возможности более функциональных конструкций, которые будут более полезными и доступными, и могут помочь нам вернуть наши устремления в области протезирования на землю.
Эта статья опубликована в печатном выпуске за октябрь 2022 г.
Технические АНТРОПОМОРФНЫЕ роботы Yaskawa | Индустриальная автоматизация. Решения в области промышленной автоматизации
Язык
- Каталонский
- Испанский
- Английский
ГлавнаяПромышленная робототехника АНТРОПОМОРФНЫЕ роботы
АНТРОПОМОРФНЫЕ роботы
Антропоморфные роботы и высокопроизводительные контроллеры роботов, гарантирующие высокую производительность
Антропоморфные роботы имеют специально указанную конфигурацию для доступа к областям с препятствиями, используя их настраиваемую конфигурацию.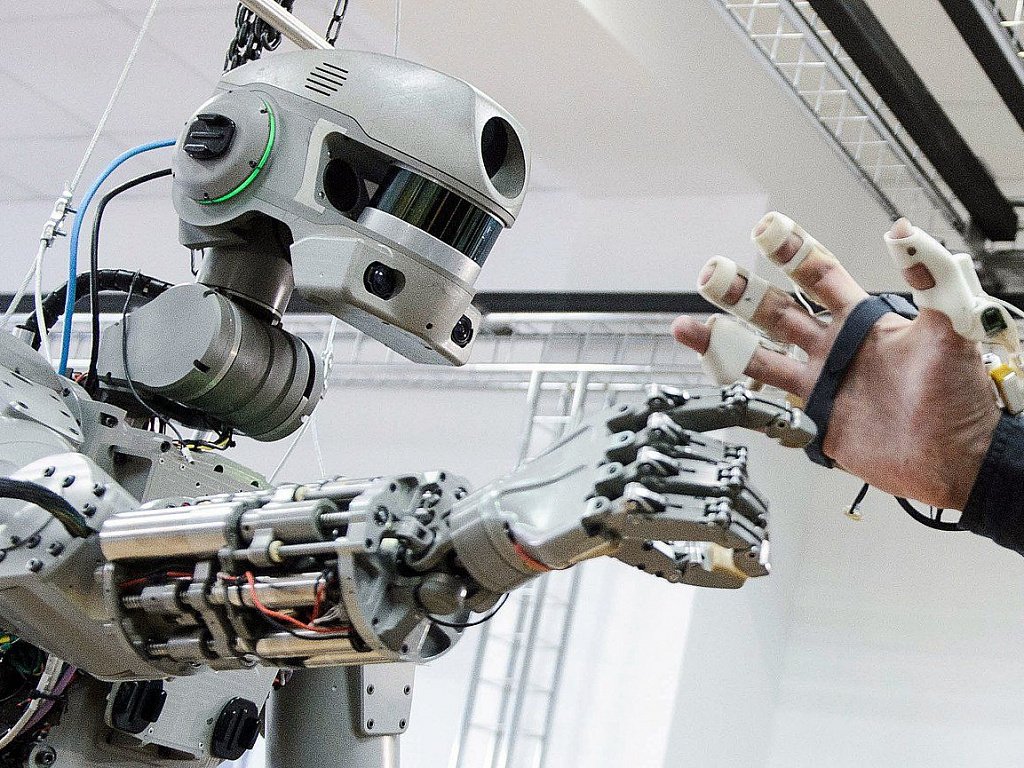 Изменяя положение и ориентацию, благодаря большому количеству степеней свободы (обычно 5 или 6), они идеально подходят для широкого спектра промышленных применений.
Изменяя положение и ориентацию, благодаря большому количеству степеней свободы (обычно 5 или 6), они идеально подходят для широкого спектра промышленных применений.
Наша линейка включает наиболее полный ассортимент антропоморфных роботов для укладки на поддоны, обвязки/подгонки, упаковки, лазерной сварки, дуговой сварки, точечной сварки, резки пламенем, загрузки и разгрузки машин, чистых помещений и т. д.
• Полезная нагрузка от 2 до 800 кг
• Высокопроизводительные контроллеры роботов
• Высокая производительность
• Сертификация DIN ISO 9001
- Транспортировка и сборка
- Сварка и резка
- Упаковка и паллетирование
- Документация
- Видео
- Серия SIA/SDA
- Серия 9 HP/MH0108
- Серия GP
- Серия чистых помещений
- Серия ES
- Серия MS
- Серия MA/MC/VS
- Серия MPK/MPP
- Серия МПЛ
- Серия MYS
Ассортимент технических роботов
АНТРОПОМОРФНЫЕ
Антропоморфные роботы и высокопроизводительные контроллеры роботов, гарантирующие высокую производительность.