Содержание
Тeхбионик
Previous
Next
-
Великий Новгород22 декабря 2021
Интеллектуальная собственность как фактор инновационного развития Новгородской области
Приняли участие в выставке и конференции….
Подробнее -
Москва25 ноября 2021
Премия ВОИР-2021
Руководитель Техбионик стал лауреатом премии….
Подробнее -
Москва22-28 августа 2021
фестиваль РобоАрмия в рамках МВТФ «Армия-2021»
Приняли участие в выставке и фестивале….
Подробнее -
Санкт-Петербург2-5 июня 2021
Петербургский международный экономический форум
Протезы SmartLi на стенде Новгородской области.
 …
…
Подробнее -
Великий Новгород19-21 мая 2021
Международная ассамблея молодых изобретателей
Представили разработки на выставке….
Подробнее -
Москва23-24 декабря 2020
Надежда на технологии 2020
Участвовали в выставке и конференции….
Подробнее -
Главный эфир01 декабря 2020
Программа Главный эфир Новгородского областного телевидения
Стали гостями программы….
Подробнее -
Кибатлетика СЗ 202031 августа 2020
Открытое первенство Северо-Запада по Кибатлетике
Приняли участие в выставке и сорвенованиях.
…
Подробнее -
Великий Новгород11 августа 2020
Startup Village-2020
Вместе с ПРОП «МП «ОРТЕЗ» испытали опытные биомеханические роботизированные ортезы….
Подробнее -
Startup Village-2020 — 21-22 мая 2020
Startup Village-2020 в Сколково
Виртуальную выставку посетили более 130 тыс. гостей….
Подробнее -
Здравоохранение 2019 — 7-11 декабря 2019
Здравоохранение 2019 в Экспоцентре
Приняли участие в национальном форуме….
Подробнее -
III медицинский инвестиционный форум — 26 ноября 2019
III Международный медицинский инвестиционный форум»
Представили протезы на выставке на III ММИФ.
…
Подробнее -
Инваэкспо 2019 — 31.10-02.11 2019
Выставка Инваэкспо-2019 на ВДНХ
Техбионик представила свои протезы….
Подробнее -
Открытые инновации 2019 — 21-23 октября 2019
В Сколково прошел форум «Открытые инновации»
Приняли участие в выставке Startup Expo….
Подробнее -
II производственное совещание — 13 сентября 2019
В Великом Новгороде прошло II производственное совещание
Техбионик представило свои разработки на профильной выставке….
Подробнее -
Протезы рук SmartLi во Пскове — 20 августа 2019
Презентация в Псковском отделении ВОИ
Двое псковичей станут нашими пилотами.
…
Подробнее -
Опоры России — 28 июня 2019
В Великом Новгороде прошел XIV Съезд лидеров «ОПОРЫ РОССИИ»
Мероприятие посетил глава «Корпорации МСП»….
Подробнее -
Innommed 2019 — 1 июня 2019
В форуме InnoMed-2019 в Пензе приняло участие около 700 человек
Наша компания представила свою продукцию….
Подробнее -
VII съезд ЦПТИ — 30 мая 2019
VII съезд центр поддержки технологий и инноваций
Делегация Роспатента приняла участие в открытии съезда….
Подробнее -
Новгородский ОПК — 29 марта 2019
Юрий Борисов ознакомился с гражданской продукцией Новгородского ОПК
В рамках экспозции продукции представили наши разработки.
…
Подробнее -
Радио КП — 7 февраля 2019
Компания Техбионик стала гостем программы радио Комсомольская правда
Рассказали о протезирования рук и наших планах на будущее….
Подробнее -
Красногорск — 15 декабря 2018
Московский областной молодежный форум инноваций и предпринимательства
Наша компания представила свои разработки на тематической выставке…
Подробнее -
Надежда на технологии — 4-5 декабря 2018
Национальный форум Надежда на технологии
Представлены образцы бионических протезов пальцев…
Подробнее -
Урок в Марёво — 23 ноября 2018
Урок в Маревской школе
Рассказали про разработки старшекласникам Маревской школы.
..
Подробнее -
Инженерный форум — 22 ноября 2018
Московский международный инженерный форум
В столице прошел VI Московский международный инженерный форум…
Подробнее -
СЗ промышленный форум — 1 ноября 2018
Северо-Западный промышленный форум
На совместной экспозиции с АО «НПО «КВАНТ» представлен образец экзоскелета…
Подробнее -
Практикум УНТИ — 29 сентября 2018
Практикум для студентов УНТИ в НовГУ
В НовГУ для студентов УНТИ прошел практикум по разработке бионических протезов…
Подробнее -
Биотехмед — 10-11 сентября 2018
Биотехмед-2018 в Геленджике
Выставка медицинской продукции в рамках форума Биотехмед.
..
Подробнее -
Первое производственное совещание — 5 сентября 2018
Первое производственное совещание в Великом Новгороде
Подписано соглашение о формировании Медико-реабилитационного кластера…
Подробнее -
Армия 2018 — 21-26 августа 2018
Инновационный клуб на Армии 2018
На тематической выставке представлены модульные бионические протезы…
Подробнее -
Детский бионический протез — 22 августа 2018
Передача детского протеза
Опытный образец бионического протеза руки передан девочке из ЛО…
Подробнее -
Инномед 2018 — 7-8 июня 2018
Инномед 2018
В Пензе прошел Всероссийский форум Инномед-2018.
..
Подробнее -
Форум Здоровье нации — 30 мая 2018
Форум «Здоровье нации»
В Москве прошел Всероссийский форум «Здоровье нации — основа процветания России»…
Подробнее -
Стартап-тур в Великом Новгороде — 18 апреля 2018
Стартап-тур в Великом Новгороде
Региональный этап стартап-тура «Открытые инновации»…
Подробнее -
Съезд травматологов-ортопедов — 11-13 апреля 2018
XI Всероссийский съезд травматологов-ортопедов»
На выставке в рамках съезда представлены медицинские и реабилитационные изделия…
Подробнее -
Локомотивы роста — 13 марта 2018
Форум СЗФО «Локомотивы роста: цифровая экономика и новое производство»
Форум прошел в Политехническом университете Петра Великого.
..
Подробнее -
Визит министра — 22 января 2018
Визит Максима Топилина в Новгородскую область»
Министр труда и социальной защиты посетил Великий Новгород…
Подробнее
 …
…
 …
…
 …
…
 …
…
 …
…
 ..
..
 ..
..
 ..
..
 ..
..
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
Исследования осуществляются при грантовой поддержке Фонда Сколково и Фонда содействия инновациям
Система менеджмента качества соответствует стандарту ГОСТ ISO 13485-2017 “Система менеджмента качества медицинских изделий”
Модульные бионические протезы руки ®
- модульная компоновка: применение при различных случаях ампутаций (части кисти, предплечья, плеча)
- три типоразмера: возможность протезирования детей от 5 лет, подростков и взрослых
- рабочий протез: точные схваты c набором сменных губок и насадок
- широкие возможности управления: ручное, одно-/двухканальное биоэлектрическое или миотоническое управление
- удобство использования: несколько программируемых шаблонов адаптивных к форме предмета схватов
- кастомизация: индивидуальный дизайн и совместимость с косметическими оболочками
- сенсорная система обратной связи: выполнение захватов хрупких предметов с контролируемым усилием
- тактильный отклик: тактильные сигналы от протеза к пользователю облегчают взаимодействие и управление
- кроссплатформенное приложение: повышение удобства управления протезом
- распознавание жестов: быстрое переключение схватов, отслеживание активности для оптимизации работы протеза
- поддержка сенсорных экранов и NFC: работа со смартфонами, системами контроля доступа
- интеллектуальный контроль АКБ: повышений срок службы и безопасность
Модульные ортезы верхних конечностей
- при нарушении двигательных функций легкой и средней тяжести: при ДЦП, постинсультных состояниях, травмах и т. п.
- изготавливаются индивидуально: ортопедическая коррекция, предотвращение вторичных деформаций конечности
- режим тренировок: работа в качестве тренажера механотерапии
- работа с ЭМГ и ЭЭГ интерфейсами: восстановление биологической обратной связи
- модульная конструкция узлов: подбор степени роботизации конечности под конкретного пользователя
 п.
п.
Биомеханический роботизированный ортез (нейромодуль ортеза)
- при нарушении двигательных функций нижних конечностей: при ДЦП, постинсультных состояниях, травмах и т.п.
- емкий аккумулятор: возможность повседневного применения в течении дня
- изготавливаются индивидуально: ортопедическая коррекция, предотвращение вторичных деформаций конечности
- из композиционных материалов: небольшая масса, высокая скорость перемещения
- кастомизация: возможность выбора индивидуального дизайна ортеза
Экзотренажер кисти
- пассивная механотерапия: при нарушениях двигательных функций кисти
- работа по заданной программе: можно применять вне стационара
- независимое движение пальцев, лз-сустава: создание различных реабилитационных программ
- сенсорный контроль: отслеживание параметров сгибания каждого пальца, лз-сустава
- анатомическое сгибание и разгибание пальцев: повышенный комфорт для пользователя
- внешний интерфейс связи: возможна работа в составе реабилитационного комплекса на базе ПК
- работа с ЭМГ и ЭЭГ интерфейсами: восстановление биологической обратной связи
Не опускайте рук: почему бионические протезы не становятся доступнее?
Главная цель разработчиков протезов — создать готовое и удобное в управлении усройство, которое можно купить, надеть и пользоваться без сложного процесса обучения. Далеко ли до этого?
Далеко ли до этого?
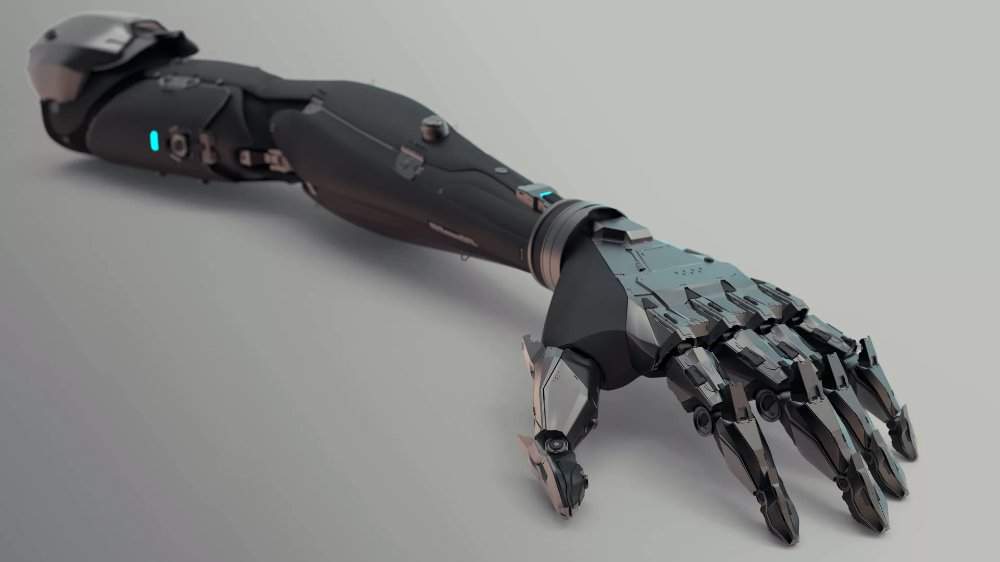
Человечество со времен средневековья и по сегодняшний день стремится создать протезы, наиболее похожие на утраченную конечность как внешне, так и функционально. Будущее — за бионическими протезами, которые механически наиболее приближены к функционалу тела здорового человека, однако проблема качественного управления такими устройствами на сегодняшний день до сих пор не имеет готового решения.
Закончили чтение тут
За последние 5 лет появилось много компаний, занимающихся разработкой бионических протезов. В основном фокус делается на дешёвые бионические устройства из пластиковых деталей, выполненных в том числе при помощи технологий 3D печати. Есть уже готовые продукты, например, от OpenBionics, которые сейчас находятся на стадии одобрения в FDA. Механическая часть у таких игроков на рынке, как OttoBock или iLimb, тоже развивается, но это развитие направлено не на удешевление протезов, а скорее на механику движений (плавность, естественность, точность). При подобном подходе функциональная часть протеза развивается, но управляемость остается прежней.
При подобном подходе функциональная часть протеза развивается, но управляемость остается прежней.
От Крюка до бионики
История протезов начинается еще в давние времена — наиболее древним считается протез глаза, который относят к III тысячелетию до н. э. В средние века стали появляться хорошо известные «пиратские» деревянные опоры вместо утраченных ног или крюки вместо кисти. Такие протезы выполняли ограниченный ряд функций, в которых нуждался конкретный человек, исходя из его рода деятельности. Подобный подход можно встретить в протезировании и сегодня.
Когда речь идет о реабилитации после ампутации руки, наиболее простым решением является косметический протез. Помимо эстетического назначения, такие протезы не выполняют практически никаких функций и не имеют преимуществ по сравнению со средневековыми протезами-крюками.
Другое решение — это тяговые протезы. Их кисти уже могут сжиматься и разжиматься за счет, например, движений лучезапястного или локтевого сустава оставшейся части руки. Эти движения руководят механическим натяжением нитей, приводящих «пальцы» в действие. Такая кисть «умеет» только сжимать кулак и разжимать его. Она отличается быстродействием и неплохой надежностью. Тяговые протезы разрабатываются отечественными инновационными компаниями, также их можно сделать самостоятельно по инструкции (что практикуется и в странах третьего мира).
Третий класс — механические протезы, управляемые мышечной активностью. Такие устройства, как правило, выполнены из металла, имеют большую прочность, но обладают только двумя степенями свободы — сжатие и разжатие. Управлять механическим протезом не очень удобно: для того, чтобы разжать кулак, нужно напрячь внешнюю сторону предплечья, а для того, чтобы сжать — наоборот, напрячь внутреннюю сторону предплечья. Это так называемый триггерный способ управления: либо мышечная активность есть — тогда движение активируется, либо мышечной активности нет. К сожалению, такая система управления может приводить к ложным срабатываниям. Механические протезы обладают «внешностью» косметических и функциональностью тяговых, питаются от аккумулятора, который размещается на протезе. Металлический каркас и мотор, приводящий в движение кисть, позволяют называть конструкцию надежной: например, если требуется держать какой-то предмет, механическая рука сможет сжать его сильно и надолго, и это практически не потребует усилий со стороны человека. Неудобное управление и ограниченная функциональность — основные недостатки механических протезов.
Это так называемый триггерный способ управления: либо мышечная активность есть — тогда движение активируется, либо мышечной активности нет. К сожалению, такая система управления может приводить к ложным срабатываниям. Механические протезы обладают «внешностью» косметических и функциональностью тяговых, питаются от аккумулятора, который размещается на протезе. Металлический каркас и мотор, приводящий в движение кисть, позволяют называть конструкцию надежной: например, если требуется держать какой-то предмет, механическая рука сможет сжать его сильно и надолго, и это практически не потребует усилий со стороны человека. Неудобное управление и ограниченная функциональность — основные недостатки механических протезов.
Последний, четвертый класс — бионические протезы, в которых каждый палец управляется отдельным мотором — это дает большее преимущество в плане манипуляций с предметами. Система управления бионической кистью такая же, как и у механической, на основе сжатия и разжатия — поэтому этими протезами сложно пользоваться. Для облегчения использования добавляют какие-либо внешние переключатели — рычажки на протезе или приложения на смартфоне.
Для облегчения использования добавляют какие-либо внешние переключатели — рычажки на протезе или приложения на смартфоне.
Дороговизна и малофункциональность
«Бионичность» подразумевает помимо восполнения механических функций потерянной руки, естественность её использования. Разработчики сфокусированы на оптимизации строения протезов — нужны максимально прочные, эргономичные, функциональные с точки зрения механики решения. Тем не менее, задача обеспечения максимальной функциональностью управления, не имеет готового решения на рынке. А неудобные и ограниченно функционирующие протезы стоят от $30 000 до $70 000.
Все сегодняшние R&D проекты сфокусированы на двух направлениях: удешевление самого протеза и улучшение системы управления. Если для первой проблемы существуют более-менее подходящие решения, то в области разработки систем управления все только начинается.
В идеале человек, пользующийся протезом, не должен замечать системы управления. То есть интерфейс между человеком и протезом использует естественные механизмы управления, которым человек обучался ещё в детстве. Таким образом, остро стоит вопрос, какой интерфейс взаимодействия между человеком и протезом стоит использовать и как подстроить это взаимодействие под индивидуальные особенности каждого?
Совершенное взаимодействие с человеком
Для удешевления производства используются технологии 3D печати. Стоимость таких протезов невысока за счет использования пластиковых деталей, а компаний, которые занимаются 3D печатью протезов, достаточно много по всему миру, в том числе и в России. Зарубежные компании создают модели бионических протезов и выкладывают их в открытый доступ, способствуя развитию и доступности протезирования. Другие компании-разработчики оптимизируют и дорабатывают дизайн и механику свободно доступных 3D моделей.
Другие компании-разработчики оптимизируют и дорабатывают дизайн и механику свободно доступных 3D моделей.
А вот решить задачу по улучшению взаимодействия человека с протезом намного сложнее. Наиболее «естественный» подход — это полноценная трансплантация руки. Мышцы и нервы при этом работают точь-в-точь как в здоровой руке, но процедура весьма дорогостоящая, требующая донорский материал, дополнительную терапию и риски отторжения. Безусловно, за таким методом, в том или ином виде будущее, которое наступит только после революций в смежных областях — лет через 100. Пока актуально создание устройств реабилитации, в достаточной мере восполняющих функции утраченной кисти и позволяющих управлять собой естественным образом.
Можно выделить четыре основных типа взаимодействия человека с протезом:
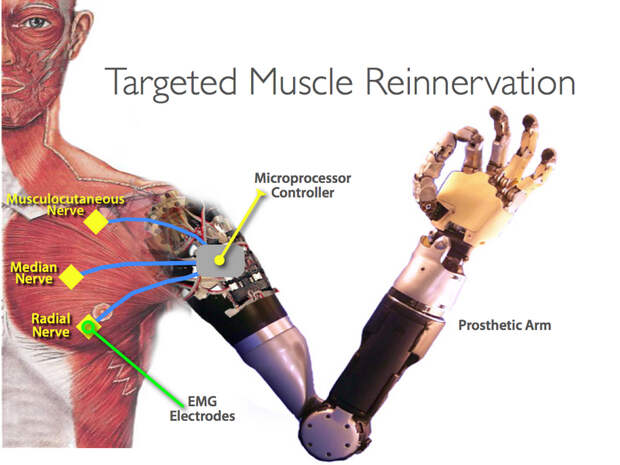
Первый, наиболее радикальный — разного рода импланты в моторную и сенсорную зоны коры головного мозга. Такой интерфейс обладает теми же недостатками, что и трансплантированная рука. Особенно уместны импланты в мозг в случае, когда по каким-либо причинам нарушена связь головного мозга и руки. В остальных случаях стоит дополнительно оценивать пользу/риск от использования такого интерфейса.
Такой интерфейс обладает теми же недостатками, что и трансплантированная рука. Особенно уместны импланты в мозг в случае, когда по каким-либо причинам нарушена связь головного мозга и руки. В остальных случаях стоит дополнительно оценивать пользу/риск от использования такого интерфейса.
Второй способ управления — использование электроэнцефалографии (ЭЭГ). Метод ЭЭГ основан на регистрации биоэлектрической активности головного мозга, возникающей вследствие распространения потенциала действия по нейронам. Метод считается перспективным, но имеет ряд технических сложностей, которые мешают появлению в продаже интерфейса на его основе. Во-первых, из-за особенностей регистрации карты мозговой активности систему нужно «обучать» заново при перемещении электродов. А во-вторых, сам сигнал очень неустойчив к различного рода электрическим наводкам и помехам.
Третий: имплантация электродов к периферическим нейронам в оставшейся части руки. Такой способ имеет все те же проблемы, что трансплантация и мозговые импланты, к тому же требует длительной и индивидуальной работы врачей.
Такой способ имеет все те же проблемы, что трансплантация и мозговые импланты, к тому же требует длительной и индивидуальной работы врачей.
И последний тип интерфейса — электромиография (ЭМГ). Простейшая его реализация — триггерная — используется в механических протезах, руководя сжатием или разжатием кисти. В бионические протезы внедрена точно такая же система управления. Но, как уже было сказано, ЭМГ в них используется только для двух степеней свободы — сгибание и разгибание пальцев. Также к ним может быть добавлена и третья степень свободы — одновременное напряжение обеих мышц, на которых измеряется ЭМГ активность.
Электромиография — это метод анализа мышечной активности, основанный на измерении разности потенциалов в двух точках, между которыми под кожей по мембранам мышечных волокон распространяется потенциал действия (именно этот потенциал представляет собой распространение волны мышечной активности от зоны, куда поступает потенциал действия моторного нейрона, заставляющей «работать» наши мышцы). Такой способ позволяет записывать сигнал мышечной активности с минимальным уровнем шума. Большая часть движения пальцев и кисти тесно связана с мышцами предплечья. Это легко проверить, положив одну руку на предплечье (чуть ниже локтя) и пошевелив пальцами другой руки — можно почувствовать, как при этом сокращаются различные мышцы предплечья. Использование системы управления, индивидуально настроенной на паттерны движений кисти конкретного человека, приближает нас к созданию естественного интерфейса между человеком и протезом. С одной стороны, он не инвазивен и обладает большой функциональностью, с другой – быстро настраивается и устойчив к внешним воздействиям. Проблемой может стать атрофия оставшихся мышц, однако метод позволяет извлечь максимум сохранившихся естественных паттернов мышечной активности.
Такой способ позволяет записывать сигнал мышечной активности с минимальным уровнем шума. Большая часть движения пальцев и кисти тесно связана с мышцами предплечья. Это легко проверить, положив одну руку на предплечье (чуть ниже локтя) и пошевелив пальцами другой руки — можно почувствовать, как при этом сокращаются различные мышцы предплечья. Использование системы управления, индивидуально настроенной на паттерны движений кисти конкретного человека, приближает нас к созданию естественного интерфейса между человеком и протезом. С одной стороны, он не инвазивен и обладает большой функциональностью, с другой – быстро настраивается и устойчив к внешним воздействиям. Проблемой может стать атрофия оставшихся мышц, однако метод позволяет извлечь максимум сохранившихся естественных паттернов мышечной активности.
Текущий статус разработок в мире
Системы управления протезом также развивается, но компаний, сфокусированных на этой задаче значительно меньше. В основном, разработчики используют уже готовые электромиографические усилители и, получив сигнал, примитивно его обрабатывают. (так или иначе всё сводится к «триггерной» системе, вопрос только в количестве порогов и в количестве каналов записи ЭМГ). В некоторых случаях, прибегают к кластерному анализу, но такое в основном встречается в научных статьях, где также утверждается, что такие методы не приспособлены для использования в реальной жизни за счет изменчивости мышечной активности. В триггерных системах используются смартфоны или иные устройства, переключающих режимы схватов, по аналогии с существующими протезами. Тем не менее, в сочетании с дешевизной 3D печати и схожей системой управления «дорогих» протезов, данные компании займут свою долю на рынке. Существует и другой подход к решению задачи управляемости — более детальная обработка ЭМГ сигнала и выделение паттернов конкретных движений, чтобы впоследствии воспроизводить их на протезе после обучения с помощью machine learning. То есть нужно обучить систему управления каждому индивидуальному движению для конкретного пациента, которое будет воспроизводиться при повторном напряжении мышц, соответствующих конкретному движению.
В основном, разработчики используют уже готовые электромиографические усилители и, получив сигнал, примитивно его обрабатывают. (так или иначе всё сводится к «триггерной» системе, вопрос только в количестве порогов и в количестве каналов записи ЭМГ). В некоторых случаях, прибегают к кластерному анализу, но такое в основном встречается в научных статьях, где также утверждается, что такие методы не приспособлены для использования в реальной жизни за счет изменчивости мышечной активности. В триггерных системах используются смартфоны или иные устройства, переключающих режимы схватов, по аналогии с существующими протезами. Тем не менее, в сочетании с дешевизной 3D печати и схожей системой управления «дорогих» протезов, данные компании займут свою долю на рынке. Существует и другой подход к решению задачи управляемости — более детальная обработка ЭМГ сигнала и выделение паттернов конкретных движений, чтобы впоследствии воспроизводить их на протезе после обучения с помощью machine learning. То есть нужно обучить систему управления каждому индивидуальному движению для конкретного пациента, которое будет воспроизводиться при повторном напряжении мышц, соответствующих конкретному движению. Данное обучение системы управления может происходить в течение 1-2 минут, при этом точность распознавания движений будет зависеть от качества алгоритмов обработки ЭМГ и алгоритмов machine learning и будет составлять не менее 99% в зависимости от многообразия распознаваемых движений. Такая система управления может быть встроена практически в любой бионический протез, что выделит его на рынке среди конкурентов. Компаний, ведущих разработку в этой области, во всем мире не так уж и много. В нашей стране этим тоже занимается ряд компаний (компания «Мионикс», которую представляет автор, — одна из них — Forbes)
Данное обучение системы управления может происходить в течение 1-2 минут, при этом точность распознавания движений будет зависеть от качества алгоритмов обработки ЭМГ и алгоритмов machine learning и будет составлять не менее 99% в зависимости от многообразия распознаваемых движений. Такая система управления может быть встроена практически в любой бионический протез, что выделит его на рынке среди конкурентов. Компаний, ведущих разработку в этой области, во всем мире не так уж и много. В нашей стране этим тоже занимается ряд компаний (компания «Мионикс», которую представляет автор, — одна из них — Forbes)
Также ведутся разработки систем обратной связи — от вибрационной тактильной обратной связи до искусственной кожи, интегрированной с нервной системой человека. Это отдельный пласт разработок, который безусловно необходим для тонких манипуляций со сложными объектами, например, хрупкими или мягкими. Без обратной связи протез, как реабилитационное устройство, не будет полноценной заменой утраченной конечности. Примечателен факт, что, как правило, разработка обратной связи не пересекается с разработкой улучшенной механики протеза и тем более системой управления бионическими протезами.
Примечателен факт, что, как правило, разработка обратной связи не пересекается с разработкой улучшенной механики протеза и тем более системой управления бионическими протезами.
Направление бионических протезов развивается во всём мире. Главная цель этого развития — создание готового удобного в управлении протеза, который можно купить, надеть и пользоваться без сложного процесса обучения. К сожалению, в настоящий момент такой продукт не создан, а спрос на него каждый год растёт. Мы верим, что в ближайшем будущем сможем увидеть дешевый протез с удобной, простой и персонализированной системой управления и обратной связью. Такие системы управления также дадут толчок к развитию экзоскелетов, управляемых небольшими мышечными усилиями.
Биомеханика в ортопедической реабилитации — Physiopedia
Оригинальный редактор — Грег Хэлфорд и Амаяк Тарахчян в рамках проекта Всемирной физиотерапевтической сети для реабилитации лиц с ампутированными конечностями
Лучшие участники — Admin , Sheik Abdul Khadir , Kim Jackson , Rachael Lowe , Tony Lowe , Evan Thomas , Aicha Benyaich , , Clare Knott.
Содержание
- 1 Введение
- 2 силы
- 3 Центр масс
- 4 Силы наземного реагирования
- 5 моментов или крутящих моментов
- 6 Осевая нагрузка протеза
- 7 Муфта для протеза
- 8 Резюме
- 9 Ресурсы
- 10 Каталожные номера
Понимание биомеханики важно при работе с людьми с ампутированными конечностями и людьми с протезами конечностей. Это особенно важно для понимания того, как возникают отклонения походки и проблемы с давлением и как их можно исправить. Понимание биомеханики имеет важное значение для протезистов, поскольку оно влияет на многие аспекты их работы во время протезной реабилитации. Ниже приводится краткое введение в основы биомеханики протезирования нижних конечностей, которое может помочь людям, не являющимся протезистами, лучше понять эту область.
Сила — это любое взаимодействие, которое стремится изменить движение объекта [1] . Силы важны в протезах. Протез прикладывает силы к человеческому телу и может изменить способ взаимодействия сил с телом. Когда сила применяется к человеческому телу, это делается над участком кожи. Это производит давление со следующим уравнением.
Силы важны в протезах. Протез прикладывает силы к человеческому телу и может изменить способ взаимодействия сил с телом. Когда сила применяется к человеческому телу, это делается над участком кожи. Это производит давление со следующим уравнением.
Давление равно силе на площади (P=F/A)
Когда площадь, по которой распределяется сила, увеличивается, давление уменьшается. Если кто-то наступает вам на ногу в шпильке (женская обувь на высоком каблуке с тонким краем), возникает сильное давление (и боль).
Тот же человек, стоящий на вашей ноге на каблуке большего размера, будет вызывать меньшее давление (и боль), потому что площадь больше. Тот факт, что это один и тот же человек, означает, что Сила в этом сценарии постоянна.
Каблук туфли на шпильке будет создавать большое давление на единицу площади. При увеличении площади (на рисунке справа) давление уменьшается.
В приведенном ниже примере мы видим, что давление также уменьшилось за счет демонстрации эффекта увеличения площади контакта под стопой.
В этом варианте классического сценария «ложе из гвоздей» мы видим, что давление уменьшается по мере увеличения площади. Сила снова остается постоянной.
Эта идея используется в конструкции гильзы протеза, чтобы попытаться распределить усилие по достаточно большой площади, чтобы снизить давление до приемлемого уровня.
Часто пациенты просят снять неудобную часть протеза. Иногда, когда это делается, площадь, на которую распространяется сила, уменьшается. Следовательно, согласно приведенному выше уравнению P=F/A, давление увеличивается. Это может привести к усилению боли через некоторое время.
Общий биомеханический принцип — это понимание центра масс [2] , иногда называемого центром тяжести. Это середина массы объекта, и можно предположить, что сила тяжести действует на объект из этой точки. Это также место, вокруг которого будут происходить вращения.
У человека с ампутированными конечностями в связи с удалением некоторой массы изменяется центр масс человека.
Сила реакции опоры (GRF) возникает при контакте с опорной поверхностью, она равна и противодействует силе, возникающей из-за прохождения массы тела через стопу на поверхность земли [3] .
Следует отметить, что «сила, обусловленная массой тела» включает в себя импульс и ускорение массы тела, а также только воздействие на нее силы тяжести. Следовательно, она отличается и в то же время похожа на весовую линию.
Выравнивание протеза изменяет походку, манипулируя положением нижней конечности и суставов протеза по отношению к силе реакции опоры (подробнее см. здесь).
GRF не используется клинически во многих местах из-за сложности его получения в режиме реального времени. Клиницисты могут попытаться понять движения, которые они видят, понимая, какое влияние GRF может оказывать на человеческое тело и протез.
Если Сила не воздействует непосредственно на COM объекта, она будет вращать объект. Если сила не действует через середину соединения с другим сегментом, она изменит угол соединения. В приведенном ниже примере стопу и ногу следует рассматривать как два сегмента, соединенных в голеностопном суставе. Поскольку GRF «толкает» стопу вверх, она будет склоняться к тыльному сгибанию стопы. Сила создает крутящий момент, который равен величине силы, умноженной на длину плеча рычага (расстояние от линии действия силы до центра сустава)
В приведенном ниже примере стопу и ногу следует рассматривать как два сегмента, соединенных в голеностопном суставе. Поскольку GRF «толкает» стопу вверх, она будет склоняться к тыльному сгибанию стопы. Сила создает крутящий момент, который равен величине силы, умноженной на длину плеча рычага (расстояние от линии действия силы до центра сустава)
При нормальном движении человека момент, создаваемый внешней силой реакции опоры, уравновешивается (по большей части) внутренней мышечной силой, которая создает противодействующий момент.
Это общее правило не всегда верно на 100%, но является полезным приближением. В случае быстрого или силового движения эти моменты не уравновешены. Также в случае полного разгибания колена в положении стоя именно напряжение в тканях заднего отдела колена создает уравновешивающий момент.
В этом примере момент тыльного сгибания, создаваемый передней GRF, уравновешивается плантаторными сгибателями за счет напряжения ахиллова сухожилия. Эта мышца имеет фиксированное плечо рычага.
Эта мышца имеет фиксированное плечо рычага.
У людей с ампутациями отсутствует прямой мышечный контроль над некоторыми суставами.
У людей с ампутациями отсутствуют части тела, поэтому в некоторых случаях мышечная деятельность не может действовать в качестве противодействия GRF, поскольку мышцы и суставы больше не присутствуют. Если GRF проходит впереди лодыжки у человека с транстибиальной ампутацией, то лодыжка остается достаточно жесткой, чтобы сопротивляться деформации в тыльное сгибание. (Это не относится к механическим протезам стопы, таким как стопа Propio от Ossur).
В случае трансфеморальной ампутации со свободным коленом (без фиксирующего механизма) GRF следует размещать впереди колена на время поддержки одной конечности. Это делается следующим образом посредством статического выравнивания с использованием более узнаваемой линии вертела бедра и лодыжки (ТКА).
В этом сценарии человек с ампутацией продолжает косвенно контролировать колено, хотя и может разгибать тазобедренный сустав. Когда возникают нежелательные биомеханические ситуации, протезист может иметь возможность изменить биомеханическую ситуацию, зафиксировав сустав для движения или манипулируя и перемещая GRF в более выгодное положение.
Когда возникают нежелательные биомеханические ситуации, протезист может иметь возможность изменить биомеханическую ситуацию, зафиксировав сустав для движения или манипулируя и перемещая GRF в более выгодное положение.
Осевая нагрузка протеза[править | править исходный код]
В норме силы тела передаются от скелетной системы к земле через основание опоры, которое включает структуры подошвенной поверхности стопы (пяточная кость, латеральный продольный свод, плюсневые головки и пальцы). У человека с ампутированной нижней конечностью эта структура может отсутствовать. Одной из основных задач протеза нижней конечности является обеспечение среды для осевой нагрузки (также известной как передача вертикальной силы вдоль длинной оси тела). Другими словами, он должен удерживать вес тела в положении стоя. Сила, создаваемая весом тела, «толкает» протез вниз. Сила проходит через протез и вниз в землю. Протез должен быть достаточно прочным, чтобы выдерживать такой вес. Компоненты протезов от производителей рассчитаны на различные допуски по весу. Детали, изготовленные по индивидуальному заказу, должны быть достаточно прочными, чтобы выдержать вес, и могут быть изготовлены в соответствии с рекомендациями или по усмотрению протезиста.
Детали, изготовленные по индивидуальному заказу, должны быть достаточно прочными, чтобы выдержать вес, и могут быть изготовлены в соответствии с рекомендациями или по усмотрению протезиста.
Осевая нагрузка достигается за счет обеспечения достаточной противодействующей силы для сопротивления действию силы тяжести. Эта сила должна быть распределена по участкам, устойчивым к давлению. Хорошее понимание этого необходимо для проектирования гильзы протеза.
Когда мы думаем о силах в протезе, гильза протеза обеспечивает среду для прохождения сил от:
- от земли до человека
И - от человека к земле.
Протезист оказывает давление на кожу, чтобы передать усилия от протеза на костную систему человека с ампутированной конечностью. Если площадь идеально подходит для осевой нагрузки, то через нее может передаваться большое количество силы. Силы, как правило, прикладывают параллельно коже, уменьшая величину отвесных сил. Опорные силы протеза на культе всегда параллельны силе реакции опоры.
Изменение положения конечности (на некоторое сгибание) может повлиять на доступную площадь для передачи вертикальной силы. Зеленая область под гнездами на рисунке ниже показывает доступную площадь для передачи вертикальной силы.
Чем больше сгибание, тем больше площадь становится доступной для передачи вертикальной силы.
Большее сгибание в суставе может иметь долгосрочные последствия для диапазона движений в суставе и должно тщательно рассматриваться как решение проблем с осевой нагрузкой.
Соединение между гильзой протеза и культей человека с ампутированной конечностью не является полностью жестким. Эту связь можно представить как нечто вроде соединения двух сегментов тела.
На этом снимке мы видим, что GRF человека с ампутацией не «толкает» протез прямо вверх. Скорее, он «толкает» медиально. Это создает крутящий момент или момент вокруг муфты между гнездом и человеком с ампутированной конечностью. Мягкие ткани сдавливаются при вращении, что приводит к давлению внутри гильзы протеза. Давление, возникающее в результате торка, показано красными стрелками внизу, проксимально медиально и дистально латерально.
Давление, возникающее в результате торка, показано красными стрелками внизу, проксимально медиально и дистально латерально.
Этому крутящему моменту противодействует сжатие мягких тканей, другими словами, крутящий момент гильзы вызывает давление в определенных частях гильзы протеза предсказуемым образом. Проблемами давления в лунке всегда должен заниматься протезист, который понимает важность выравнивания. Слишком быстрый переход к переделке гнезда не всегда является хорошим решением в клинике. Изменения центровки обычно происходят быстро и легко обратимы с помощью современных компонентов.
К телу человека при протезировании прикладывают силы, это неизменно приводит к давлению. Давлением можно управлять, увеличивая площадь, на которую оно воздействует, и продуманно распределяя его на области, устойчивые к давлению. Выравнивание протеза нижней конечности может влиять на давление в лунке предсказуемым образом. Изменения в протезе могут изменить преобладающую биомеханическую ситуацию за счет ограничения диапазона движений или перемещения GRF.
Протезист — ключевой специалист, которому поручено управление протезом и его воздействием на организм человека. Присутствие протезиста в составе междисциплинарной команды необходимо для успешной ортопедической реабилитации. Использование знаний биомеханики протезистом дает значительные возможности для оптимизации биомеханических условий для пользователя протеза.
Биомеханика протезирования нижних конечностей
Протезирование нижних конечностей: кинезиология и биомеханика
Нормальная человеческая локомоция, Часть 2: Движение, сила реакции опоры и мышечная активность
Силы наземного реагирования
Коленный направитель WestMARC для многопрофильной бригады протезистов
Учебники
- Левин Д., Ригардс Дж. и Уиттл М. В. Анализ походки Уиттла. 5-е издание Черчилль Ливингстон 2012 г.
- Киртли Дж. Клинический анализ походки: теория и практика. Черчилль Ливингстон 2006
- ↑ Force. Википедия. Доступ по адресу http://en.wikipedia.org/wiki/Force, 8 марта 2015 г.
- ↑ Центр масс человека. Справочник по физике. http://hypertextbook.com/facts/2006/centerofmass.shtml, по состоянию на 8 марта 2015 г.
- ↑ Сила реакции земли. Бесплатный словарь http://medical-dictionary.thefreedictionary.com/ground+reaction+force, по состоянию на 8 марта 2015 г.
 Доступ по адресу http://en.wikipedia.org/wiki/Force, 8 марта 2015 г.
Доступ по адресу http://en.wikipedia.org/wiki/Force, 8 марта 2015 г.Биомеханика в ортопедической реабилитации — Physiopedia
Первоначальный редактор — Грег Хэлфорд и Амаяк Тарахчян в рамках проекта Всемирной физиотерапевтической сети для реабилитации лиц с ампутированными конечностями
Лучшие участники — Admin , Sheik Abdul Khadir , Kim Jackson , Rachael Lowe , Tony Lowe , Evan Thomas , Aicha Benyaich , , Clare Knott.
Содержание
- 1 Введение
- 2 силы
- 3 Центр масс
- 4 Силы наземного реагирования
- 5 Моменты или крутящие моменты
- 6 Осевая нагрузка протеза
- 7 Муфта для протеза
- 8 Резюме
- 9 Ресурсы
- 10 Каталожные номера
Понимание биомеханики важно при работе с людьми с ампутированными конечностями и людьми с протезами конечностей. Это особенно важно для понимания того, как возникают отклонения походки и проблемы с давлением и как их можно исправить. Понимание биомеханики имеет важное значение для протезистов, поскольку оно влияет на многие аспекты их работы во время протезной реабилитации. Ниже приводится краткое введение в основы биомеханики протезирования нижних конечностей, которое может помочь людям, не являющимся протезистами, лучше понять эту область.
Это особенно важно для понимания того, как возникают отклонения походки и проблемы с давлением и как их можно исправить. Понимание биомеханики имеет важное значение для протезистов, поскольку оно влияет на многие аспекты их работы во время протезной реабилитации. Ниже приводится краткое введение в основы биомеханики протезирования нижних конечностей, которое может помочь людям, не являющимся протезистами, лучше понять эту область.
Сила — это любое взаимодействие, которое стремится изменить движение объекта [1] . Силы важны в протезах. Протез прикладывает силы к человеческому телу и может изменить способ взаимодействия сил с телом. Когда сила применяется к человеческому телу, это делается над участком кожи. Это производит давление со следующим уравнением.
Давление равно силе на площади (P=F/A)
Когда площадь, по которой распределяется сила, увеличивается, давление уменьшается. Если кто-то наступает вам на ногу в шпильке (женская обувь на высоком каблуке с тонким краем), возникает сильное давление (и боль).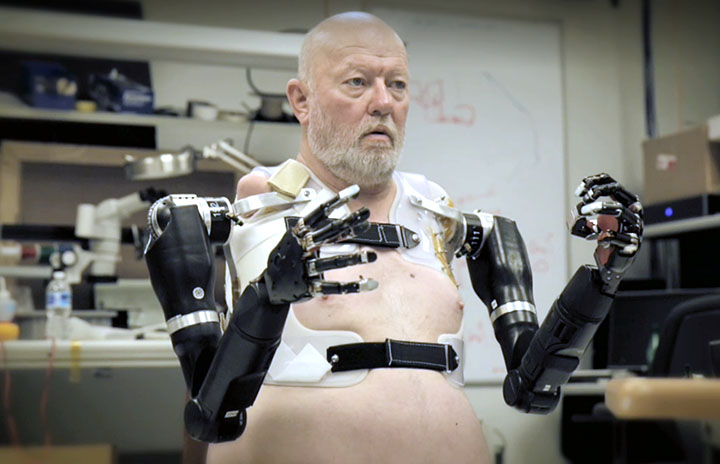
Тот же человек, стоящий на вашей ноге на каблуке большего размера, будет вызывать меньшее давление (и боль), потому что площадь больше. Тот факт, что это один и тот же человек, означает, что Сила в этом сценарии постоянна.
Каблук туфли на шпильке будет создавать большое давление на единицу площади. При увеличении площади (на рисунке справа) давление уменьшается.
В приведенном ниже примере мы видим, что давление также уменьшилось за счет демонстрации эффекта увеличения площади контакта под стопой.
В этом варианте классического сценария «ложе из гвоздей» мы видим, что давление уменьшается по мере увеличения площади. Сила снова остается постоянной.
Эта идея используется в конструкции гильзы протеза, чтобы попытаться распределить усилие по достаточно большой площади, чтобы снизить давление до приемлемого уровня.
Часто пациенты просят снять неудобную часть протеза. Иногда, когда это делается, площадь, на которую распространяется сила, уменьшается.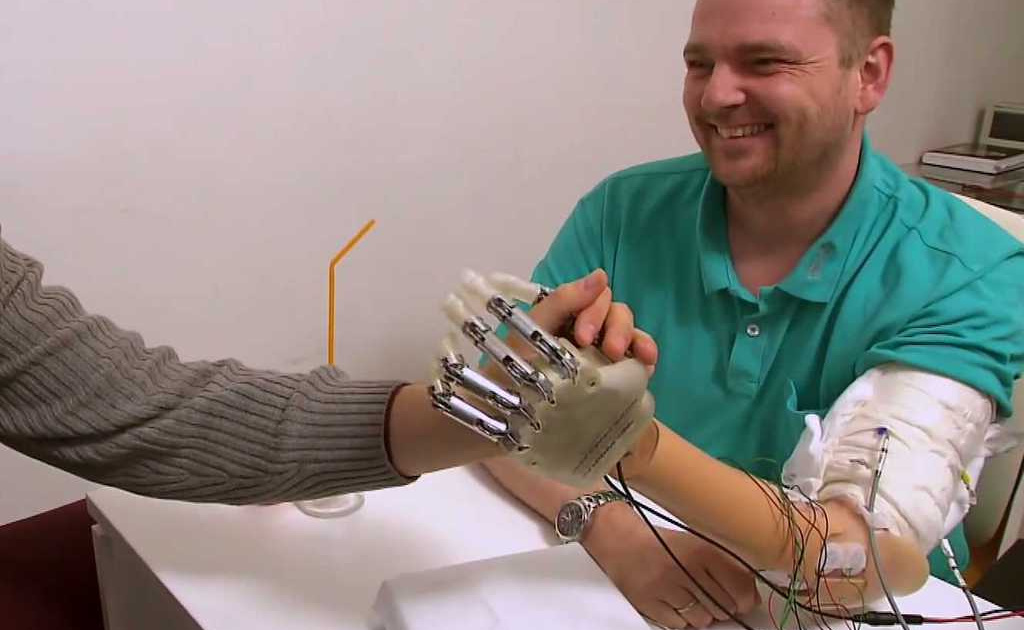 Следовательно, согласно приведенному выше уравнению P=F/A, давление увеличивается. Это может привести к усилению боли через некоторое время.
Следовательно, согласно приведенному выше уравнению P=F/A, давление увеличивается. Это может привести к усилению боли через некоторое время.
Общий биомеханический принцип — это понимание центра масс [2] , иногда называемого центром тяжести. Это середина массы объекта, и можно предположить, что сила тяжести действует на объект из этой точки. Это также место, вокруг которого будут происходить вращения.
У человека с ампутированными конечностями в связи с удалением некоторой массы изменяется центр масс человека.
Сила реакции опоры (GRF) возникает при контакте с опорной поверхностью, она равна и противодействует силе, возникающей из-за прохождения массы тела через стопу на поверхность земли [3] .
Следует отметить, что «сила, обусловленная массой тела» включает в себя импульс и ускорение массы тела, а также только воздействие на нее силы тяжести. Следовательно, она отличается и в то же время похожа на весовую линию.
Выравнивание протеза изменяет походку, манипулируя положением нижней конечности и суставов протеза по отношению к силе реакции опоры (подробнее см. здесь).
здесь).
GRF не используется клинически во многих местах из-за сложности его получения в режиме реального времени. Клиницисты могут попытаться понять движения, которые они видят, понимая, какое влияние GRF может оказывать на человеческое тело и протез.
Если Сила не воздействует непосредственно на COM объекта, она будет вращать объект. Если сила не действует через середину соединения с другим сегментом, она изменит угол соединения. В приведенном ниже примере стопу и ногу следует рассматривать как два сегмента, соединенных в голеностопном суставе. Поскольку GRF «толкает» стопу вверх, она будет склоняться к тыльному сгибанию стопы. Сила создает крутящий момент, который равен величине силы, умноженной на длину плеча рычага (расстояние от линии действия силы до центра сустава)
При нормальном движении человека момент, создаваемый внешней силой реакции опоры, уравновешивается (по большей части) внутренней мышечной силой, которая создает противодействующий момент.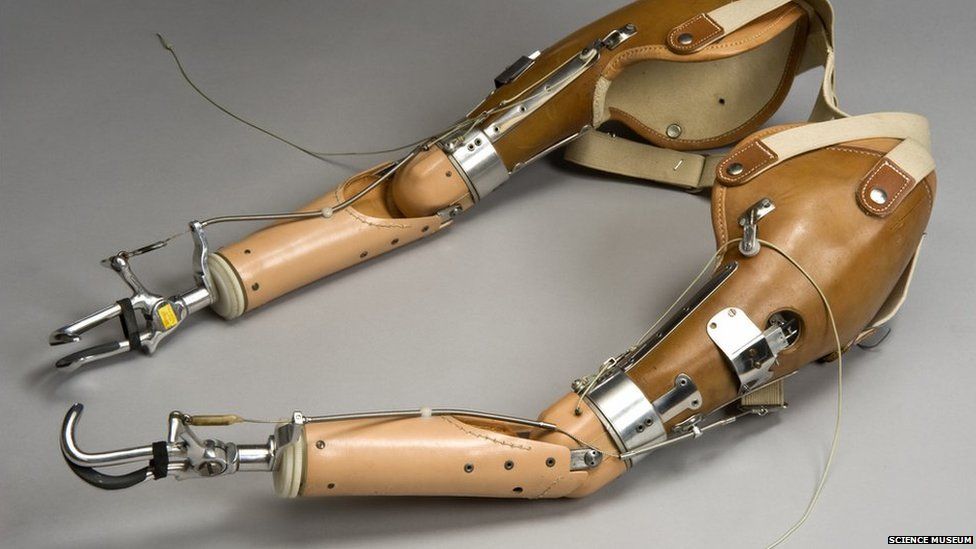
Это общее правило не всегда верно на 100%, но является полезным приближением. В случае быстрого или силового движения эти моменты не уравновешены. Также в случае полного разгибания колена в положении стоя именно напряжение в тканях заднего отдела колена создает уравновешивающий момент.
В этом примере момент тыльного сгибания, создаваемый передней GRF, уравновешивается плантаторными сгибателями за счет напряжения ахиллова сухожилия. Эта мышца имеет фиксированное плечо рычага.
У людей с ампутациями отсутствует прямой мышечный контроль над некоторыми суставами.
У людей с ампутациями отсутствуют части тела, поэтому в некоторых случаях мышечная деятельность не может действовать в качестве противодействия GRF, поскольку мышцы и суставы больше не присутствуют. Если GRF проходит впереди лодыжки у человека с транстибиальной ампутацией, то лодыжка остается достаточно жесткой, чтобы сопротивляться деформации в тыльное сгибание. (Это не относится к механическим протезам стопы, таким как стопа Propio от Ossur).
В случае трансфеморальной ампутации со свободным коленом (без фиксирующего механизма) GRF следует размещать впереди колена на время поддержки одной конечности. Это делается следующим образом посредством статического выравнивания с использованием более узнаваемой линии вертела бедра и лодыжки (ТКА).
В этом сценарии человек с ампутацией продолжает косвенно контролировать колено, хотя и может разгибать тазобедренный сустав. Когда возникают нежелательные биомеханические ситуации, протезист может иметь возможность изменить биомеханическую ситуацию, зафиксировав сустав для движения или манипулируя и перемещая GRF в более выгодное положение.
Осевая нагрузка протеза[править | править исходный код]
В норме силы тела передаются от скелетной системы к земле через основание опоры, которое включает структуры подошвенной поверхности стопы (пяточная кость, латеральный продольный свод, плюсневые головки и пальцы). У человека с ампутированной нижней конечностью эта структура может отсутствовать. Одной из основных задач протеза нижней конечности является обеспечение среды для осевой нагрузки (также известной как передача вертикальной силы вдоль длинной оси тела). Другими словами, он должен удерживать вес тела в положении стоя. Сила, создаваемая весом тела, «толкает» протез вниз. Сила проходит через протез и вниз в землю. Протез должен быть достаточно прочным, чтобы выдерживать такой вес. Компоненты протезов от производителей рассчитаны на различные допуски по весу. Детали, изготовленные по индивидуальному заказу, должны быть достаточно прочными, чтобы выдержать вес, и могут быть изготовлены в соответствии с рекомендациями или по усмотрению протезиста.
Одной из основных задач протеза нижней конечности является обеспечение среды для осевой нагрузки (также известной как передача вертикальной силы вдоль длинной оси тела). Другими словами, он должен удерживать вес тела в положении стоя. Сила, создаваемая весом тела, «толкает» протез вниз. Сила проходит через протез и вниз в землю. Протез должен быть достаточно прочным, чтобы выдерживать такой вес. Компоненты протезов от производителей рассчитаны на различные допуски по весу. Детали, изготовленные по индивидуальному заказу, должны быть достаточно прочными, чтобы выдержать вес, и могут быть изготовлены в соответствии с рекомендациями или по усмотрению протезиста.
Осевая нагрузка достигается за счет обеспечения достаточной противодействующей силы для сопротивления действию силы тяжести. Эта сила должна быть распределена по участкам, устойчивым к давлению. Хорошее понимание этого необходимо для проектирования гильзы протеза.
Когда мы думаем о силах в протезе, гильза протеза обеспечивает среду для прохождения сил от:
- от земли до человека
И - от человека к земле.

Протезист оказывает давление на кожу, чтобы передать усилия от протеза на костную систему человека с ампутированной конечностью. Если площадь идеально подходит для осевой нагрузки, то через нее может передаваться большое количество силы. Силы, как правило, прикладывают параллельно коже, уменьшая величину отвесных сил. Опорные силы протеза на культе всегда параллельны силе реакции опоры.
Изменение положения конечности (на некоторое сгибание) может повлиять на доступную площадь для передачи вертикальной силы. Зеленая область под гнездами на рисунке ниже показывает доступную площадь для передачи вертикальной силы.
Чем больше сгибание, тем больше площадь становится доступной для передачи вертикальной силы.
Большее сгибание в суставе может иметь долгосрочные последствия для диапазона движений в суставе и должно тщательно рассматриваться как решение проблем с осевой нагрузкой.
Соединение между гильзой протеза и культей человека с ампутированной конечностью не является полностью жестким. Эту связь можно представить как нечто вроде соединения двух сегментов тела.
Эту связь можно представить как нечто вроде соединения двух сегментов тела.
На этом снимке мы видим, что GRF человека с ампутацией не «толкает» протез прямо вверх. Скорее, он «толкает» медиально. Это создает крутящий момент или момент вокруг муфты между гнездом и человеком с ампутированной конечностью. Мягкие ткани сдавливаются при вращении, что приводит к давлению внутри гильзы протеза. Давление, возникающее в результате торка, показано красными стрелками внизу, проксимально медиально и дистально латерально.
Этому крутящему моменту противодействует сжатие мягких тканей, другими словами, крутящий момент гильзы вызывает давление в определенных частях гильзы протеза предсказуемым образом. Проблемами давления в лунке всегда должен заниматься протезист, который понимает важность выравнивания. Слишком быстрый переход к переделке гнезда не всегда является хорошим решением в клинике. Изменения центровки обычно происходят быстро и легко обратимы с помощью современных компонентов.
К телу человека при протезировании прикладывают силы, это неизменно приводит к давлению. Давлением можно управлять, увеличивая площадь, на которую оно воздействует, и продуманно распределяя его на области, устойчивые к давлению. Выравнивание протеза нижней конечности может влиять на давление в лунке предсказуемым образом. Изменения в протезе могут изменить преобладающую биомеханическую ситуацию за счет ограничения диапазона движений или перемещения GRF.
Протезист — ключевой специалист, которому поручено управление протезом и его воздействием на организм человека. Присутствие протезиста в составе междисциплинарной команды необходимо для успешной ортопедической реабилитации. Использование знаний биомеханики протезистом дает значительные возможности для оптимизации биомеханических условий для пользователя протеза.
Биомеханика протезирования нижних конечностей
Протезирование нижних конечностей: кинезиология и биомеханика
Нормальная человеческая локомоция, Часть 2: Движение, сила реакции опоры и мышечная активность
Силы наземного реагирования
Коленный направитель WestMARC для многопрофильной бригады протезистов
Учебники
- Левин Д.
