Содержание
Кто создает киборгов: как стать разработчиком киберпротезов
Раньше протезы заменяли недостающую часть тела, были простой опорой, теперь — это функциональный гаджет. Разбираемся, кто создает протезы конечностей и органов и когда киборгизация начнется в России
⏰ Время на чтение: 3–5 минут
Кто такой разработчик киберпротезов
Это человек, который разрабатывает протезы конечностей и органы, совместимые с живыми тканями. Он работает на стыке медицины, нейрофизиологии, инженерии и программирования. Разрабатывает протезы вместе с дизайнерами, инженерами-робототехниками и пилотами-тестировщиками.
Разработчик киберпротезов — профессия будущего
По словам основателя компании «Моторика» Ильи Чеха, миллионы людей в мире живут без рук и только 20% из них пользуются протезами. Разработчики киберпротезов создают искусственные руки, которые по возможностям почти не уступают настоящим. Человек с протезом может взять даже мелкие предметы, например, чайную ложку.
Посмотрите, как живет человек с киберпротезом
Чем занимается разработчик киберпротезов
Сначала такой специалист создает проект бионического протеза или органа. Он изучает биоэлектрические импульсы, связывающие нервную и мышечную системы человека, и придумывает, как их соединить с протезом. Например, чтобы на протезе руки двигались пальцы, в него встраивают специальные мио-датчики. Они считывают электрический потенциал сохранившихся мышечных тканей и посылают сигнал в протез — тут и происходит движение. Затем специалист создает 3D-модель для принтера. Он моделирует устройство по индивидуальным параметрам и готовит к покраске.
Дальше разработчик подбирает подходящие материалы: биологически совместимые, с симбиотическим потенциалом, которые не отвергнет организм. Важно максимально «сроднить» человека и его протез, чтобы конструкция из пластика и металла стала полноценной частью тела.
Если человек будет плавно помахивать рукой, а потом резко захочет ее опустить, протез должен считать это желание так же быстро, как живая рука.
Ключевые навыки
Как объяснил РБК Трендам Илья Чех, разработчику киберпротезов следует разбираться в электронике, программировании, материаловедении, конструировании, биофизике и нейрофизиологии. А вот несколько его основных навыков:
- написание и отладка кода;
- управление проектами и проектирование механизмов, прототипов, макетов, чертежей;
- работа с 3D-принтерами и программами 3D-моделирования;
- установка и контроль протеза;
- межкультурная коммуникация;
- экологическое и системное мышление;
- наблюдение за пациентом.
Тренды и направления профессии
Киборгизация — это объединение технологий и органики, создание гибрида биологического существа и машины. По мнению Чеха, новое направление активно развивается и скоро станет одним из ключевых в медицине.
Следующий шаг в развитии протезирования — создание вживляемых интерфейсов, которые будут считывать сигналы мозга нашему телу. Например, американские ученые разработали нейроинтерфейс, помогающий парализованным людям пользоваться планшетом. Он передает сигнал от вживленных в кору головного мозга электродов к планшету через Bluetooth. Люди с таким интерфейсом уже смогли сделать покупки, пообщаться в мессенджере и посчитать на калькуляторе.
Например, американские ученые разработали нейроинтерфейс, помогающий парализованным людям пользоваться планшетом. Он передает сигнал от вживленных в кору головного мозга электродов к планшету через Bluetooth. Люди с таким интерфейсом уже смогли сделать покупки, пообщаться в мессенджере и посчитать на калькуляторе.
Чтобы разрабатывать долгосрочные интерфейсы и выпускать их на рынок, текущих технологий и материалов пока не хватает. По словам Чеха, это серьезный технологический вызов, история недалекого будущего.
Откуда придет профессия
По словам Ильи Чеха, разработчиков киберпротезов в нашей стране очень мало, всего пару сотен на всю Россию. Обычно они приходят из смежных отраслей — медицины или инженерии. Доучивать такого работника нужно несколько месяцев, а готовить с нуля — три-пять лет. Чем быстрее вырастет рынок, тем больше вузов станут готовить таких специалистов.
Как стать разработчиком киберпротезов
Будущему специалисту лучше определить для себя приоритетную область знаний, но обязательно следует интересоваться смежными областями.
Илья Чех рекомендует поступать на общее направление робототехники и мехатроники, которое есть почти во всех ведущих технических вузах: Московском институте электроники и математики им. А. Н. Тихонова, Национальном исследовательском ядерном университете «МИФИ», МГТУ им. Баумана, МФТИ, Университете ИТМО, московском «Политехе».
Техническое образование поможет сформировать общее понимание робототехники и всех ее компонентов: программирования, электроники и конструирования. А уже после можно начать разбираться в медицине — пройти курсы или поступить на медицинские факультеты «медицинская кибернетика», «биотехнические системы и технологии».
Бионические соединения
Новый способ подключать протезы кистей и рук к нервной системе может позволить мозгу контролировать протезы так же легко, как и настоящие конечности.
Об авторах
В одной из самых каноничных сцен научно-фантастического кино Люк Скайуокер исследует возможности своего искусственного предплечья и кисти. Герой киноэпопеи может двигать своими пальцами, растягивая и стягивая поршни, как мы видим через откинутую кожу на запястье. Затем он чувствует, как медицинский робот касается одного его пальца. Люк не только может управлять своей рукой, но и чувствовать ее как свою.
Герой киноэпопеи может двигать своими пальцами, растягивая и стягивая поршни, как мы видим через откинутую кожу на запястье. Затем он чувствует, как медицинский робот касается одного его пальца. Люк не только может управлять своей рукой, но и чувствовать ее как свою.
Что зритель не видит, так это саму связь между человеком и машиной. Нейроученые, такие как мы, понимают, что для того, чтобы заставить такую систему работать, нужно научиться переводить нервные импульсы из мозга в электрические сигналы, затем в искусственную руку и обратно. Если не брать в расчет кино, в реальном мире никто еще не выяснил, как соединить нервную систему с электрическими цепями таким образом, чтобы создать связь между протезом и телом, как это было бы в обычном теле.
И неудивительно, что мы еще не выяснили как. Во-первых, нервы и электрические цепи, которые вместе должны управлять электроникой в протезе, используют совершенно разные принципы передачи сигналов. В электронных устройства передача сигналов основана на токе электронов по проводящим материалам, а также через полупроводники и транзисторы. Нервная система же опирается на деполяризацию клеточных мембран и выброс сигнальных веществ в пространство между нервными клетками. Во-вторых, такая связь требует имплантации проводов и других электронных приборов в тело. Тело, естественно, воспримет такие импланты как чужеродные, что приведет к постоянным атакам со стороны иммунной системы и последующей скарификации тканей вокруг интерфейсов, что приведет к нарушению работы системы.
Нервная система же опирается на деполяризацию клеточных мембран и выброс сигнальных веществ в пространство между нервными клетками. Во-вторых, такая связь требует имплантации проводов и других электронных приборов в тело. Тело, естественно, воспримет такие импланты как чужеродные, что приведет к постоянным атакам со стороны иммунной системы и последующей скарификации тканей вокруг интерфейсов, что приведет к нарушению работы системы.
Последние несколько лет исследования в сфере нанотехнологий и хирургии направлены как раз на устранение выше обозначенных проблем. Вместо того, чтобы заставить нервы взаимодействовать напрямую с нормальной электроникой в современных протезах, мы вместе с другими пытаемся построить «мост» между нервами и протезами на основе врожденной способности нервной системы адаптироваться к новым ситуациям. Мы действительно приблизились к воссозданию той сцены из «Звездных войн». Такие искусственные конечности могут ощущаться и управляться мозгом.
Изображение: Scientific American
Соединяя моторную и сенсорную функции
Возможно, это прозвучит цинично, но мы обязаны колоссальному прогрессу в производстве протезов военным конфликтам – в частности, войнам в Ираке и Афганистане. Только в последние годы компании сфокусировались на производстве искусственных верхних конечностей. Ведь создать искусственные ноги для выполнения двух основных функций — бега и ходьбы — гораздо легче, чем создать высокоточные руки с широким диапазоном возможностей. С 2006 года, когда DARPA запустила новую программу по исследованию искусственных конечностей, исследователи сделали существенный прорыв в создании усложненных протезов верхних конечностей.
Только в последние годы компании сфокусировались на производстве искусственных верхних конечностей. Ведь создать искусственные ноги для выполнения двух основных функций — бега и ходьбы — гораздо легче, чем создать высокоточные руки с широким диапазоном возможностей. С 2006 года, когда DARPA запустила новую программу по исследованию искусственных конечностей, исследователи сделали существенный прорыв в создании усложненных протезов верхних конечностей.
Трудность в создании высоко функционального протеза верхней конечности заключается в полном (или хотя бы частичном) копировании мелкой моторики рук. Чтобы достигнуть этого, требуется установить связь с областями мозга, которые он использует для передачи нервных импульсов к определенным мышечным волокнам, контролирующим предплечье, и для получения и обработки информации о давлении, положении, напряжении, импульсе, в области начиная от руки и заканчивая кистью. Все эти данные позволяют мозгу понять, сколько усилий нужно вложить в любое действие.
В здоровой конечности все эта моторика и сенсорика наряду с другими вещами создает чувство, называемое проприоцепция – осязание того, где именно находится часть тела в пространстве и отношение этой части тела к другим частям без необходимости смотреть на них. Без этого чувства выполнение таких простейших действий, как письмо ручкой, было бы практически невозможным. Спасибо сложной симфонии в работе нервной системы. Система сигналов от мозга к конечностям и обратно позволяет нам писать ручкой, нажимая с нужной силой, и делать мелкие отступы между словами, перенося ручку по воздуху.
На сегодняшний день, были разработаны роботизированные руки, которые позволяют различную косвенную регуляцию моторики. В некоторых случаях, например, повторное напряжение и расслабление мышц в культе или в груди может активировать специальный переключатель, который вызывает различные движения в протезе.
Но в идеале биоинженеры хотят создать такой протез, который присоединен к моторным нейронам и который можно контролировать с помощью этих же нейронов, которые не погибли после ампутации, а остались на краю поврежденной культи.
Использование моторных нейронов, естественно, только часть картины. Множество простых операций вызывают колоссальные сложности даже у самых передовых протезов. Все это из-за того, что протез не посылает сигналы обратно к мозгу. Ампутанты вынуждены полагаться на свое зрение, а не на естественное чувство проприоцепции в оценке того, как именно им управлять своим протезом. Даже, казалось бы, простейшая операция — застегивание пуговицы,превращается в марафон для пациента. Он сильно устает от медленных и неуклюжих движений своего протеза, затрачивая усилия на концентрацию.
Критично важно для инженеров создать «мост» между нервной системой и протезом, который будет не только воспроизводить моторные функции, но и сенсорную информацию в обе стороны от протеза к мозгу и обратно. Такой «нейро-механический мост» сделает возможной разработку протеза, который контролируется и ощущается, как настоящая рука, нашим мозгом. Наша и еще несколько лабораторий усиленно работают над практическим решением этой проблемы. И хотя мы используем разные подходы для решения этой задачи со своими преимуществами и трудностями, успех, вероятнее всего, будет достигнут сочетанием наработок каждой лаборатории и технологических инноваций.
И хотя мы используем разные подходы для решения этой задачи со своими преимуществами и трудностями, успех, вероятнее всего, будет достигнут сочетанием наработок каждой лаборатории и технологических инноваций.
ДВА ГЛАВНЫХ ПОДХОДА
Первый шаг — это необходимость решить, куда именно в нервной системе поставить интерфейс для соединения мозга и конечности. Есть два основных способа: работать с ЦНС (соединение с мозгом или со спинным мозгом) или пойти дальше и задействовать периферическую нервную систему с нервами, расположенными в основном между спинным мозгом и остальным телом.
Сейчас большинство исследователей сконцентрировались на мозге как на стартовом узле. Наименее инвазивный способ заключается в том, чтобы разместить интерфейс под скальпом или прямо под черепом на поверхности самого мозга. Электроды регистрируют электрический сигнал из мозга, которые анализируются в компьютере,
и затем компьютер дает сигнал о нужном движении. Есть плюс в этом методе – не нужно делать отверстие в мозге. В то же время, возможна интерференция волн с другой электроникой. Также электрические сигналы являются довольно грубым отражением того, что мозг на самом деле делает, и что в свою очередь делает сложным для компьютера предугадать, какое движение должно произойти.
Есть плюс в этом методе – не нужно делать отверстие в мозге. В то же время, возможна интерференция волн с другой электроникой. Также электрические сигналы являются довольно грубым отражением того, что мозг на самом деле делает, и что в свою очередь делает сложным для компьютера предугадать, какое движение должно произойти.
Самый инвазивный способ — имплантация микроэлектродов в верхние слои мозга (микроэлектроды, сверхпроводники из кремния, каждый меньше человеческого волоса в диаметре). Как прямой интерфейс, этот способ дает мощное преимущество в получении точной и богатой информации – включая силу и частоту импульсов возбуждения для каждой нервной клетки. Идея заключается в использовании специального программного обеспечения для расшифровки и преобразования информации в нужное действие.
Такая высоко детализированная информация, в теории, должна предоставить возможность очень точной контроль над протезом.
Прямая связь мозгом уже проверена на множестве людей. В одном случае женщина была парализована инсультом. С роботизированной рукой она выпила кофе из емкости, используя только силу мысли. В 2012 DARPA запустила программу с вышеназванной схемой контроля над конечностями для людей, которые потеряли верхние конечности. В двух случаях электроды, записывающие информацию с нейронов, были присоединены к проводами, выходящими из черепа. Сигнал затем расшифровывался на мощном компьютере, который в свою очередь ретранслировал команды на роботизированную руку. В конечном счете, исследователи хотели бы передавать информацию беспроводным способом, чтобы пациент не был привязан к компьютеру. К сожалению, на данный момент вычислительная мощность не может быть настолько портативно упакована, как того требуют реальные жизненные условия.
В одном случае женщина была парализована инсультом. С роботизированной рукой она выпила кофе из емкости, используя только силу мысли. В 2012 DARPA запустила программу с вышеназванной схемой контроля над конечностями для людей, которые потеряли верхние конечности. В двух случаях электроды, записывающие информацию с нейронов, были присоединены к проводами, выходящими из черепа. Сигнал затем расшифровывался на мощном компьютере, который в свою очередь ретранслировал команды на роботизированную руку. В конечном счете, исследователи хотели бы передавать информацию беспроводным способом, чтобы пациент не был привязан к компьютеру. К сожалению, на данный момент вычислительная мощность не может быть настолько портативно упакована, как того требуют реальные жизненные условия.
Еще один риск — мозговая ткань распознает эти электроды, как чужеродные, и запускает воспалительную реакцию, что в конечном итоге приведет к скарификации электродов. Рубцовая ткань в свою очередь экспоненциально приводит к уменьшению количества отслеживаемых нервных клеток, что ведет к понижению силы сигнала и к уменьшению информативности сигнала от электродов с течением времени, что, в итоге, ухудшит работу протеза.
У некоторых пациентов электроды продолжали давать информацию с одного или нескольких нейронов на протяжении большего периода времени, но это скорее исключение. Исследователи сейчас ищут способы уменьшить силу реакции тела на чужеродные объекты в мозгу.
Изображение: Scientific American
ПЕРИФЕРИЧЕСКИЕ ПРЕИМУЩЕСТВА
Такие вызовы заставили двоих из нас постараться воздействовать на периферическую нервную систему.
ЦНС включает в себя до 100 млрд клеток, периферическая НС состоит из волокон, назвываемых аксонами, которые сгруппированы вместе для формирования нервов. Эти аксоны — длинные отростки нервных клеток (до метра длинной), которые передают электрические сигналы от ЦНС к остальным частям тела.
Некоторые из этих периферических нервных волокон соединяют спинной мозг с мышцами, и, следовательно, позволяют мозгу контролировать моторные функции путем отправления сигналов к спинному мозгу.
Другие периферические нервные волокна передают сенсорную информацию (положение конечности в пространстве, температуру или касания) от тела к спинному мозгу, откуда затем следует в мозг для дальнейшей обработки.
Сенсорные нервные окончания в культе часто продолжают посылать сигналы, так же, как если бы они получали информацию от руки или ноги. Многие ампутанты продолжают чувствовать утраченную конечность – состояние, называемое фантомным. Если бы мы могли перехватить эти ошибочные сигналы от сенсорных аксонов и передать их искусственным конечностям, которые посылали бы сильные сигналы к нервам, мозг легко бы воспринял эти сигналы как от настоящей конечнонсти.
То же самое и с моторными аксонами периферической нервной системы — они все еще могут направлять движение. По причине того, что мозг сохраняет возможность координировать и управлять этими различными моторными сигналами, это может позволить управлять конечностями, как своими собственными.
Проблема в том, что аксоны ПНС не вырастут длиннее, если у них нет биологической цели, с которой они могут создать контакт. Помимо этого известно, что ЦНС и тело плохо реагируют на провода, имплантированные в периферические нервы.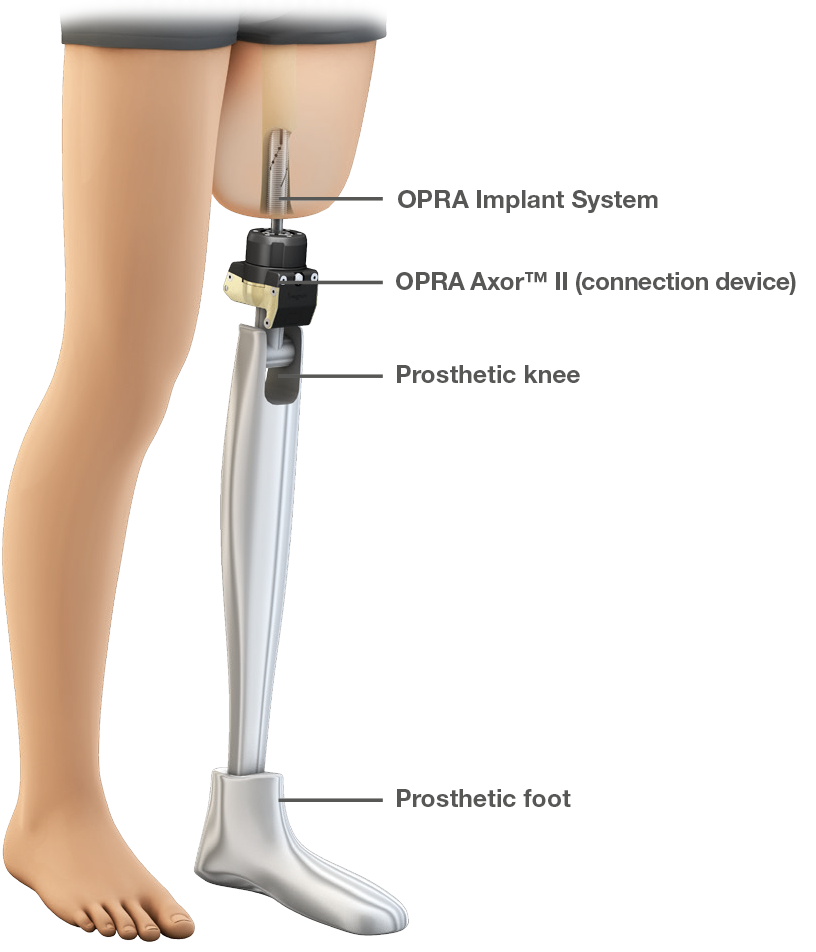
Тодд Куикенн из Северо-Западного университета и его группа провели серьезную работу над этой проблемой. Исследования проводились на добровольцах, используя их мышцы груди, как своего рода мост между культей руки и всей электрической системой протеза. Для начала исследователи отделили моторные нервы от поверхностных мышц груди, чтобы они не получали лишние сигналы от мозга. Потом они аккуратно перенаправили моторные аксоны, которые соединяли позвоночник и травмированную части руки, так чтобы они теперь присоединились к поверхностным мышцам груди.
В течении недель перенаправленные нервы соединились и стали раздражать (иннервировать) мышцы груди. Команды от мозга, раньше направлявшиеся к руке, которой уже не было, теперь шли к груди, что заставляло мышцы сокращаться.
Электроды на коже груди стали записывать активность некоторых сокращенных мышц, что, очевидно, было связанно с получением сигналов от мозга. После нескольких недель тренировок пациенты, наконец, смогли манипулировать своими протезами, просто думая о том, что они хотели бы сделать. Например, мысль о захвате кружки вела к определенному шаблону сокращений в груди, которые «говорили» электронике в протезе сжать пальцы в искусственной руке.
Например, мысль о захвате кружки вела к определенному шаблону сокращений в груди, которые «говорили» электронике в протезе сжать пальцы в искусственной руке.
Куикенн и его команда используют этот метод, названный теперь «направленная мускульная реиннервация», на множестве ампутантов. Эта технология позволяет воссоздать неплохой уровень контроля, но подлинно «природный» уровень контроля настоящий кисти и руки еще должен быть разработан.
НЕЙРО-МОСТЫ
Мы полагаем, что приемлемый уровень контроля моторных функций искусственной руки потребует создания принципиально иного типа соединения между живыми тканями и протезом. К счастью, не только мышцы могут реиннервироваться, но также и поврежденные нервы. Проще говоря, нервы даже могут принять трансплантированные нервы как свою часть. Поэтому, 6 лет назад мы решили изучить возможность использования трансплантированных нервных волокон вместо мышечных, как промежуточное звено между повоежденными аксонами на культе и электрической проводкой на протезе.
Чтобы создать такой мост, в первую очередь нужно понять, как выращивать нервные волокна достаточной длины для того, чтобы закрыть промежутки между «домашними» аксонами и электроникой. Один из нас (Smith) придумал технику удлинения аксонов в клеточной культуре до нужной длины. Этот процесс использует природную способность нервов удлиняться в процессе обычных всплесков роста. Наиболее примечательный пример такого удлинения наблюдается в аксонах спинного мозга голубого кита. Аксоны растут по 3см в день и легко достигают 30 метров в длину.
В целом, мы берем культуру нервных клеток и начинаем ее разделять, растягивая половинки в разные стороны каждый день. Из-за растяжения, центральные аксоны вынуждены расти в двух направлениях, чтобы снять напряжение. На основе этого природного процесса мы разработали устройства – аксонные удлинители, способные удлинять аксоны приблизительно на сантиметр в день. И так вплоть до 10см и, возможно, даже длиннее.
Одно из первых применение таких растянутых аксонов — живой мост для восстановления повреждённых периферических нервов. Когда мы имплантировали пучки аксонов в крыс таким образом, что один конец был близок к кончику поврежденного нерва, аксоны вытянулись и росли вдоль всей длины моста. В самом деле, многие из аксонов вытянулись так далеко в ранее парализованную конечность, что нерв был полностью восстановлен, и крысы смогли восстановить функцию конечности.
Когда мы имплантировали пучки аксонов в крыс таким образом, что один конец был близок к кончику поврежденного нерва, аксоны вытянулись и росли вдоль всей длины моста. В самом деле, многие из аксонов вытянулись так далеко в ранее парализованную конечность, что нерв был полностью восстановлен, и крысы смогли восстановить функцию конечности.
В дополнение, мы определили, что наши нейро-мосты функционируют как минимум 4 месяца после трансплантации, не вызывая при этом иммунного ответа. Успех в экспериментах на крысах подвел нас к следующему шагу — экспериментам на свиньях. Если результаты окажутся положительными, технологию можно будет применить на людях с поврежденными нервами.
Продемонстрировав возможность направлять и стимулировать рост аксонов, мы попытались создать новые, более сложные типы таких мостов, которые позволят аксону обмениваться информацией с электронной системой протеза. Наше целью было найти для этого тонкие проводящие нити, которые тело не воспримет как инородные тела. После тестов и ошибок мы решили создать наши филаменты на основе полианилина — азотосодержащего органического соединения, которое проводит электрический ток. Также другие исследователи подтвердили, что он не воспринимается телом как чужеродный материал. По крайней мере, тесты на грызунах показали, что такие полимеры действительно не вызывают острый иммунный ответ.
После тестов и ошибок мы решили создать наши филаменты на основе полианилина — азотосодержащего органического соединения, которое проводит электрический ток. Также другие исследователи подтвердили, что он не воспринимается телом как чужеродный материал. По крайней мере, тесты на грызунах показали, что такие полимеры действительно не вызывают острый иммунный ответ.
Следующим шагом было заставить выращенные в лаборатории нейроны расти вокруг этих микрофиллмаментов и затем растянуть аксоны к «домашнему» нерву (другой конец микрофиламента соединился бы с протезом через беспроводной передатчик). В идеале, аксоны от культи должны расти вдоль наших растянутых аксонов и взаимодействовать с филаментами, которые в свою очередь получали бы электрические сигналы с моторных аксонов культи и переводили бы их в электронику. Так же и с сенсорными сигналами с электроники, которые проходили бы через филаменты, вызывая деполяризацию сенсорных аксонов, выросших на мосту, и после этого всего передавали бы информацию в спинной и головной мозг.
Используя этот способ на крысах, мы обнаружили, что растянутая нервная ткань обеспечивает путь, который ведет «домашние» аксоны на менее чем несколько десятков микрон в полимерных филаментах. Этого достаточно, чтобы разные филаменты записывали сигналы, идущие в одном направлении по нервам (вниз по конечности) и стимулировали нервы, идущих обратно (к мозгу). Проще говоря, мы создали простой адаптер-шнур, соединяющий приборы с разными разъемами. Наш гибрид биологической ткани (нейроны и их растянутые аксоны) и небиологический проводник позволяют электронике в протезе присоединяться и к аксонам, и к культе.
Такие биогибриды сейчас выжили и интегрировались с «домашним» нервом на протяжении как минимум месяца после трансплантации. Примечательно, что данный механизм не вызывает иммунного ответа, который способен «уничтожить» систему за несколько дней. В настоящее время тестирование этого подхода продолжается.
СЛЕДУЮЩИЕ ШАГИ
Все звучит оптимистично, но наши биогибриды пока находятся в начальной стадии своего развития. Мы не знаем, как долго продержатся наши мосты и как отреагирует иммунная система на полимерные компоненты в течение более длительного срока. Также нам необходимо уменьшить интерференцию с другими электрическими устройствами и увеличить чувствительность отдельных нервных сигналов, передающихся через мост в протез. Даже если мы можем соединить нейроны культи с протезом, мы не можем гарантировать верную интерпретацию мозгом сигналов из протеза.
Мы не знаем, как долго продержатся наши мосты и как отреагирует иммунная система на полимерные компоненты в течение более длительного срока. Также нам необходимо уменьшить интерференцию с другими электрическими устройствами и увеличить чувствительность отдельных нервных сигналов, передающихся через мост в протез. Даже если мы можем соединить нейроны культи с протезом, мы не можем гарантировать верную интерпретацию мозгом сигналов из протеза.
Опыт с пересадкой рук позволяет надеяться, что мозг сможет работать в таком режиме. В таких трансплантациях хирурги не могут соединить каждый нерв тела с трансплантируемой рукой. Такая точность может и не понадобиться. Мозг человека способен перерисовать внутреннюю карту, содержащую информацию о том, что каждый моторный нейрон будет делать что-то свое, и, таким образом, позволяя управлять новой рукой. Так же как и управление роботизированной рукой, соединенной с нервами, возможно потребует дополнительной перетренировки мозга.
Дальнейший прогресс в увеличении управляемости искусственной руки также может включить в себя комбинацию в исследовании роли ЦНС и ПНС. Пока же создание прямых связей между мозгом и передовыми протезами (путем воздействия напрямую на головной мозг, через переориентированные мышцы груди или через биогибридные мосты) увеличивает шансы создать искусственную руку, которая будет двигаться и ощущаться, как настоящая рука.
Пока же создание прямых связей между мозгом и передовыми протезами (путем воздействия напрямую на головной мозг, через переориентированные мышцы груди или через биогибридные мосты) увеличивает шансы создать искусственную руку, которая будет двигаться и ощущаться, как настоящая рука.
Интерфейс между рукой Люка Скайуокера и его новой рукой так и не был показан в «Империя наносит ответный удар». Что же, теперь это дело ученых — выяснить, как такая рука может быть создана.
Оригинал статьи
Перевод: Глеб Кашев
Редактор: Станислав Груздев
Делаем протезы более естественными | Новости Массачусетского технологического института
Новая хирургическая техника, разработанная исследователями Массачусетского технологического института, может позволить протезам чувствовать себя гораздо больше, чем естественные конечности. Благодаря координации протеза конечности пациента, существующих нервов и мышечных трансплантатов люди с ампутированными конечностями смогут ощущать, где их конечности находятся в пространстве, и чувствовать, какая сила прилагается к ним.
Этот тип системы может помочь снизить процент отторжения протезов конечностей, который составляет около 20 процентов.
«Мы говорим о резком улучшении ухода за пациентами», — говорит Хью Герр, профессор медийных искусств и наук и старший автор исследования. «В настоящее время нет надежного нейронного метода, позволяющего человеку с ампутированной конечностью чувствовать проприоцептивное положение и силу, приложенную к протезу. Представьте, как это полностью помешало бы человеку двигаться, успешно балансировать или манипулировать объектами».
В новом исследовании, которое появляется в Science Robotics 931 мая 2010 года исследователи продемонстрировали на крысах, что их метод генерирует мышечно-сухожильную сенсорную обратную связь с нервной системой, которая должна передавать информацию о размещении протеза и приложенных к нему силах. Теперь они планируют начать применять этот подход к людям с ампутированными конечностями, в том числе к герру, чьи ноги были ампутированы ниже колена, когда ему было 17 лет. является ведущим автором статьи. Другими авторами являются приглашенный ученый Media Lab Мэтью Карти, студент Массачусетского технологического института Питер Кальварези, аспиранты HST Тайлер Клитс и Бенджамин Маймон, аспирант Media Lab Кэмерон Тейлор и недавний обладатель докторской степени Энтони Зорзос.
является ведущим автором статьи. Другими авторами являются приглашенный ученый Media Lab Мэтью Карти, студент Массачусетского технологического института Питер Кальварези, аспиранты HST Тайлер Клитс и Бенджамин Маймон, аспирант Media Lab Кэмерон Тейлор и недавний обладатель докторской степени Энтони Зорзос.
Лучшая обратная связь
Во время обычной ампутации конечности мышцы разрезаются таким образом, что прерывается ключевая взаимосвязь, которая обычно помогает людям контролировать свои конечности и чувствовать, где они находятся в пространстве. Большинство мышц, контролирующих движения конечностей, образуют пары, известные как пары агонистов-антагонистов, так что одна мышца растягивается, когда другая сокращается. Например, когда вы сгибаете локоть, двуглавая мышца сокращается, заставляя трицепс растягиваться, и это растяжение трицепса отправляет сенсорную информацию, связанную с положением, скоростью и силой, обратно в мозг. Взаимоотношение мышц-агонистов и антагонистов также позволяет людям независимо контролировать положение и жесткость суставов конечностей.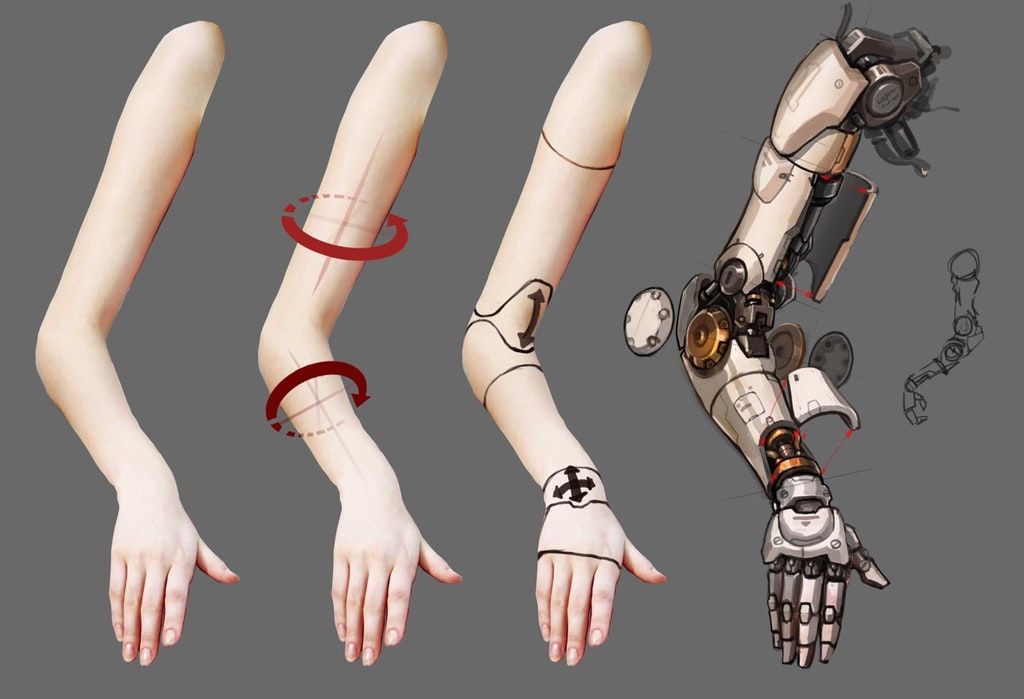
Без этих неповрежденных мышечных пар люди с ампутированными конечностями не могут ощущать, где находятся их протезы, и не могут ощущать силы, приложенные к этим конечностям.
«Они должны визуально следить за своими руками или конечностями, потому что нет никакой обратной связи от устройства или культи, которая сообщает их мозгу, где в пространстве находятся их протезы конечностей», — говорит Шринивасан.
Команда Массачусетского технологического института решила воссоздать эти взаимоотношения мышц-агонистов и антагонистов. У многих людей с ампутированными конечностями нервы, которые посылают сигналы к ампутированной конечности, остаются неповрежденными. Исследователи решили воспользоваться этими нервами, соединив их с парами мышц, пересаженными из другой части тела в место ампутации.
Эти трансплантаты, размер которых у человека составляет примерно 4 сантиметра на 1,5 сантиметра, состоят из пары мышц, которые работают вместе, как естественные мышцы. Когда мозг посылает сигналы, предписывающие конечности двигаться, одна из пересаженных мышц сокращается, а ее агонист растягивается. Затем мышца-агонист посылает в мозг обратную связь о том, насколько сильно двигалась мышца и какие силы к ней прикладывались.
Затем мышца-агонист посылает в мозг обратную связь о том, насколько сильно двигалась мышца и какие силы к ней прикладывались.
В статье Science Robotics исследователи протестировали мышечные трансплантаты на крысах и обнаружили, что, когда крысы сокращают одну мышцу из пары, другая мышца будет двигаться в противоположном направлении и отправлять сенсорную информацию обратно в мозг.
Система управления
В другой работе исследователи разработали компоненты системы управления, которая преобразует нервные сигналы в инструкции по перемещению протеза. Когда мозг посылает нервные импульсы к регенерированным мышцам, эти сигналы также будут получены микропроцессором, который управляет движением искусственной конечности.
Нервная стимуляция вызывает сокращение мышцы-агониста и растяжение мышцы-антагониста. Затем растянутая мышца обеспечивает нейронную обратную связь, позволяя пациенту чувствовать, где в пространстве находится его или ее конечность. Исследователи ожидают, что мозг сможет быстро узнать, насколько сильно он должен контролировать, чтобы искусственная конечность двигалась желаемым образом.
Исследователи ожидают, что мозг сможет быстро узнать, насколько сильно он должен контролировать, чтобы искусственная конечность двигалась желаемым образом.
«Используя этот каркас, пациенту не придется думать о том, как управлять своим протезом. Когда пациент представляет себе, как двигает его фантомная конечность, сигналы будут посылаться через нервы к хирургически сконструированным парам мышц. Затем имплантированные мышечные электроды будут воспринимать эти сигналы для управления синтетическими моторами внешнего протеза», — говорит Херр. «Мы думаем, что, поскольку мозг настолько хорош в переназначении и он такой пластичный, он быстро адаптируется к знанию того, насколько сильно он должен сокращать каждый мышечный трансплантат для естественного управления протезом».
Этот тип системы обратной связи также должен позволять людям с протезом руки, например, чувствовать крутящий момент, прилагаемый к протезу. «Если бы вы дали пользователю протеза руки штангу, он бы действительно почувствовал крутящий момент на протезе лучезапястного сустава», — говорит Херр.
Исследователи предполагают, что эта стратегия может сработать практически для любого человека с ампутированными конечностями, включая людей, которым ампутация была выполнена много лет назад.
«Практически при любом сценарии ампутации, пока у нас остается немного здорового нерва, мы можем взять его и поместить в регенеративные мышечные трансплантаты. Мы можем собирать эти мышечные трансплантаты практически из любой части тела, что делает это применимым к большому количеству случаев, от травм до хронической боли», — говорит Шринивасан.
Рикард Бранемарк, адъюнкт-профессор ортопедической хирургии Калифорнийского университета в Медицинской школе Сан-Франциско, описывает новый подход Массачусетского технологического института как «блестящую идею».
«Это решение одной из основных проблем, когда речь идет об управлении искусственными конечностями, а именно определение местоположения конечности в пространстве», — говорит Бранемарк, не участвовавший в исследовании. «Если это можно сделать на людях, связанные с этим риски довольно ограничены, а потенциальная польза может быть действительно огромной».
«Если это можно сделать на людях, связанные с этим риски довольно ограничены, а потенциальная польза может быть действительно огромной».
Исследование финансировалось Консорциумом медиа-лаборатории Массачусетского технологического института.
Поделитесь этой новостной статьей:
Упоминания в прессе
PBS NOVA
На PBS Nova состоялась премьера документального фильма «Augmented», в котором рассказывается о работе профессора Хью Херра и его исследовательской группы по разработке роботизированных конечностей, управляемых мозгом, и переосмыслению процедур ампутации. «Герр объединяется с травмированным альпинистом и хирургом из ведущей бостонской больницы, чтобы протестировать новый подход к хирургической ампутации, который позволяет протезам двигаться и ощущаться как настоящие», — пишет PBS Nova.
Полная история через PBS NOVA →
CBS Boston
Корреспондент CBS Boston доктор Маллика Маршалл рассказывает об исследованиях, проведенных исследователями из Массачусетского технологического института и Brigham and Women’s Hospital по разработке роботизированных протезов конечностей, управляемых мозгом. «Это прекрасный опыт исследователя», — объясняет Герр влияние своей работы. «Они уходят, начинают плакать или смеяться, хихикать и говорить: «Боже мой, я вернул свое тело, вернул ногу, вернул себе жизнь».0003
«Это прекрасный опыт исследователя», — объясняет Герр влияние своей работы. «Они уходят, начинают плакать или смеяться, хихикать и говорить: «Боже мой, я вернул свое тело, вернул ногу, вернул себе жизнь».0003
Forbes
В статье для Forbes Чарльз Тауэрс-Кларк рассказывает о том, как исследователи Массачусетского технологического института разработали хирургическую технику, которая позволяет людям с ампутированными конечностями получать обратную связь от протезов конечностей. В этой технике, пишет Тауэрс-Кларк, «используется мышечный трансплантат из другой части тела для завершения мышечной пары, что позволяет избежать отторжения, которое в настоящее время происходит примерно в 20% случаев, и позволяет пациенту естественным образом общаться с новой конечностью».
Полная история через Forbes →
Fast Company
Профессор Хью Херр и его команда из группы биомехатроники разрабатывают протезы, которые «реагируют на нейронные команды с гибкостью и скоростью обычных конечностей», — пишет Эйли Анзилотти для Fast Company. В процессе, впервые предложенном группой, «врачи оставляют сухожилия и нервные окончания нетронутыми, чтобы они могли продолжать питать ощущения дальше, чем заканчивается человеческая нога», — говорит Анзилотти.
В процессе, впервые предложенном группой, «врачи оставляют сухожилия и нервные окончания нетронутыми, чтобы они могли продолжать питать ощущения дальше, чем заканчивается человеческая нога», — говорит Анзилотти.
Полная история через Fast Company →
Мир PRI
Аспирантка Шрия Сринивасан беседует с Айрой Флатоу из PRI Science Friday о хирургической технике, которую она и ее коллеги разработали, чтобы протезы чувствовались более естественно. Шринивасан объясняет, что эта техника позволяет пациентам «более точно контролировать протезы — и иметь возможность регулировать положение, скорость и жесткость протезов, что является значительным улучшением клинического стандарта».
Полная история через PRI’s The World →
Scientific American
Исследователи из Массачусетского технологического института разработали хирургическую технику, которая может сделать протезы конечностей более естественными, пишет Карен Вайнтрауб для Scientific American . «При таком подходе мы абсолютно уверены, что человек на самом деле почувствует положение, на самом деле почувствует скорость, на самом деле почувствует силу», — говорит профессор Хью Херр. «Это будет полностью похоже на их собственную конечность».
«При таком подходе мы абсолютно уверены, что человек на самом деле почувствует положение, на самом деле почувствует скорость, на самом деле почувствует силу», — говорит профессор Хью Херр. «Это будет полностью похоже на их собственную конечность».
Полностью через Scientific American →
Наука
Исследователи из Массачусетского технологического института разработали хирургическую технику, которая может привести к созданию более реалистичных протезов конечностей, сообщает Мэтью Хатсон для Наука . Новая техника в сочетании с интеллектуальным протезом должна позволить пользователям «чувствовать то же, что они когда-то чувствовали, когда у них была конечность», — говорит профессор Хью Херр.
Полная история через науку →
Связанные ссылки
- Hugh Herr
- Группа биомехатроники
- MIT Media Lab
- Школа архитектуры и планирования
- Hardard Mit.
 Сделанный?
Сделанный?Каждый пациент, перенесший ампутацию, уникален, а это означает, что каждый протез должен быть спроектирован и изготовлен по индивидуальному заказу, чтобы соответствовать телу пациента. Процесс проектирования и производства протезов включает в себя ряд шагов для создания эффективного и функционирующего протеза.
Прежде чем протезист сможет приступить к проектированию протеза, он или она должны выполнить точные измерения. Если возможно, протезист может начать измерять тело пациента до того, как конечность будет ампутирована, и встретиться с хирургом до операции, чтобы получить более подробную информацию об ампутации.
В послеоперационном периоде протезист и хирург принимают решение о соответствующей послеоперационной повязке, которая обычно состоит из компрессионного трикотажа, помогающего эвакуировать жидкость из культи, что способствует заживлению. Можно также воспользоваться немедленным послеоперационным протезом, чтобы облегчить реабилитацию на ранней стадии и нагрузку.
После заживления раны и избавления культи от избыточной припухлости протезист снимает гипсовую или стеклопластиковую модель культи, которая служит ориентиром для изготовления протеза. Затем протезист превращает этот полый слепок в позитивную модель конечности пациента, используя гипс, воду и вермикулит. Затем протезист приступает к кропотливому процессу модификации положительной формы, чтобы отразить предполагаемые принципы дизайна и создать удобный для ношения интерфейс. Из этой модифицированной формы создается прозрачная пластиковая копия анатомической культи, которая будет использоваться для проверки прилегания протеза на начальных этапах изготовления.
После того, как будет достигнута необходимая посадка, пластиковая втулка будет преобразована в более прочную втулку из углеродного волокна или ламинированного акрила и собрана для формирования окончательного протеза. При проектировании протеза необходимо учитывать многие факторы, такие как общее состояние здоровья пациента и расположение мышц, сухожилий и костей в культе.
Однако наиболее важно то, что протез должен быть разработан в соответствии с функциональными целями пациента (например, ежедневное использование, ходьба, бег, плавание, катание на лыжах, езда на велосипеде и т. д.). В случае нижней конечности протезист также должен выровнять конечность по приспособление к уникальному образцу походки человека с ампутированной конечностью путем механических регулировок, в то время как пациент использует конечность в смоделированных ситуациях.Как делают протезы?
Для создания настоящей конечности используется широкий спектр материалов, включая акриловую смолу, углеродное волокно, термопласты, силикон, алюминий и титан. Чтобы создать реалистичный вид, можно нанести пенопластовый чехол и придать ему форму, соответствующую реальной конечности. Поверх пены будет нанесено гибкое покрытие, похожее на кожу, чтобы придать ей реалистичный вид. Эта особенность, однако, не признается большинством страховых компаний медицинской необходимостью, поэтому пациент несет финансовую ответственность за дополнительные расходы на «живую» конечность.
После изготовления, подгонки и доставки конечности; корректировки с течением времени, как правило, необходимы для обеспечения правильной посадки. В конце концов, цель состоит в том, чтобы создать конечность, которая хорошо подходит и облегчает образ жизни пациента и целевой уровень активности.
Что происходит после изготовления протеза?
После того, как пациенту будет установлен индивидуальный протез, он или она пройдет физиотерапию, чтобы научиться использовать новую конечность и добиться максимального успеха с протезом. Физиотерапия является важной частью процесса, так как научиться ходить с протезом ноги и хватать предметы протезом руки может быть чрезвычайно сложно. Во время физиотерапии пациенты также могут научиться пользоваться протезом в повседневных жизненных ситуациях.
Разнообразие протезов
Поскольку протезы предназначены для того, чтобы помочь людям с ампутированными конечностями вернуться к своей обычной жизни и повседневной жизни, существует множество вариантов.
 Сделанный?
Сделанный?
 Однако наиболее важно то, что протез должен быть разработан в соответствии с функциональными целями пациента (например, ежедневное использование, ходьба, бег, плавание, катание на лыжах, езда на велосипеде и т. д.). В случае нижней конечности протезист также должен выровнять конечность по приспособление к уникальному образцу походки человека с ампутированной конечностью путем механических регулировок, в то время как пациент использует конечность в смоделированных ситуациях.
Однако наиболее важно то, что протез должен быть разработан в соответствии с функциональными целями пациента (например, ежедневное использование, ходьба, бег, плавание, катание на лыжах, езда на велосипеде и т. д.). В случае нижней конечности протезист также должен выровнять конечность по приспособление к уникальному образцу походки человека с ампутированной конечностью путем механических регулировок, в то время как пациент использует конечность в смоделированных ситуациях.
