Содержание
Робот-гепард от MIT умеет делать сальто назад и быстро бегать / Хабр
Роботизированными животными сейчас никого не удивишь. Больше всех преуспели в создании четвероногих роботов разработчики из Boston Dynamics. Эта компания показывала и двуногих роботов, которые научились преодолевать препятствия, причем не только переступать через них, но даже перепрыгивать.
Но у Boston Dynamics есть конкуренты, в частности, разработчики из MIT. На днях они показали миниатюрного робота-гепарда (на настоящего гепарда он не очень похож), которого научили не только двигаться вперед, назад, боком, но и совершать сальто назад. Насколько известно, другие роботы (кроме игрушечных) такое делать не умеют.
Робот двигается очень быстро — в два раза быстрее, чем идет человек. Если робота уронить, даже на спину, он сможет очень быстро подняться «на лапы», при помощи приема, который очень похож на тот, что демонстрируют упавшие мастера восточных единоборств. Но наиболее интересным умением этого робота является прыжок в воздухе назад, обратное сальто.
Но наиболее интересным умением этого робота является прыжок в воздухе назад, обратное сальто.
Разработчики утверждают, что робот сделан устойчивым к внешним воздействиям. Он достаточно прочный. Кроме того, даже если его прыжок закончится в луже, то с механизмом ничего не случится (по крайней мере, если лужа не очень глубокая).
Структура робота модульная, что позволяет удешевить стоимость конструкции. Мини-гепард получил три сервопривода для каждой из лап. Они недорогие и при желании их можно быстро заменить. «Вы можете собирать части робота как Lego», — заявил один из его создателей.
Кстати, текущую версию можно сравнить с прототипом от 2013 года. Разница разительная.
Исследователи покажут конструкционные особенности аппарата в мае, на мероприятии International Conference on Robotics and Automation. Сейчас разработчики заняты созданием и других четвероногих систем. Всего, насколько можно судить, их будет 10.
«Одна из причин создания робота — возможность экспериментировать с ним, пробовать разные необычные трюки, поскольку система достаточно крепкая и вовсе не распадается, если применить к ней внешнее воздействие. Если же авария таки случается, то робота можно легко восстановить», — сообщил представитель команды разработчиков.
Испытания включают отработку новых алгоритмов «поведения» робота, который способен передвигаться очень быстро, выполняя сложные маневры.
«В итоге, я надеюсь, мы сможем провести гонки с роботами, конечно, с препятствиями, где каждая команда будет контролировать своего робота, работающего по собственному алгоритму, и мы определим, какая стратегия является более эффективной», — говорят разработчики.
Создатели робота гордятся тем, что они смогли переосмыслить конструкцию своих роботов-животных. Предыдущие прототипы были «цельными», интегрированными воедино. Новые же «гепарды» являются модульными, о чем уже сообщалось выше. И если бы разработчик что-то захотел изменить в предыдущей версии, ему бы пришлось кардинально менять конструкцию. С «гепардом» же все проще — устанавливается новая деталь иной конструкции вместо старой (например, это могут быть манипуляторы) и все.
С «гепардом» же все проще — устанавливается новая деталь иной конструкции вместо старой (например, это могут быть манипуляторы) и все.
Каждый из 12 моторов робота небольшой. Размер примерно равен размеру крышки банки Мейсона. Конструкция мотора включает статор, набор катушек, которые генерируют вращающееся магнитное поле; маленький контроллер, который задает ток, генерируемый статором; ротор с магнитами, вращающийся вместе с полем статора, создавая крутящий момент для подъема или вращения конечности; редуктор, который обеспечивает понижающую передачу 6: 1; датчик положения, который измеряет угол и ориентацию двигателя и связанной робо-конечности.
Движения каждой из конечностей определяются работой трех сервоприводов, то есть у «ног» три степени свободы. Все это легкое, так что робот может совершать быстрые движения и выполнять практически любые задачи оператора.
Для роботов разрабатываются алгоритмы, которые дают устройствам возможность ориентироваться на местности и передвигаться тем либо иным образом по разным типам рельефа. Робот может подниматься и спускаться по ступенькам, бегать по почве и камню, передвигаться в куче опавшей листвы (этот момент показан на видео).
Робот может подниматься и спускаться по ступенькам, бегать по почве и камню, передвигаться в куче опавшей листвы (этот момент показан на видео).
К сожалению, неясно, какой запас хода робота на одном заряде аккумулятора.
В дальнейшем разработчики планируют усовершенствовать как конструкцию робота, так и его алгоритмы, для чего и будут проводиться «забеги» с участием сразу десяти гепардов. В ходе соревнований можно будет определить оптимальные алгоритмы и продолжать работать именно с ними.
Робот-гепард от инженеров МIT бежит с «оторванной» ногой учится на свои ошибках
Поиск по сайту
Новости
18 марта 2022
Далее
Анастасия
Никифорова
Новостной редактор
Анастасия
Никифорова
Новостной редактор
Сотрудники Массачусетского технологического института (MIT) создали робота-гепарда. Он может адаптироваться к неожиданной местности.
Он может адаптироваться к неожиданной местности.
Читайте «Хайтек» в
Миниатюрный робот-гепард, который создали в MIT побил личный рекорд скорости. Он разогнался до 14,04 км/ч благодаря новой системе обучения с подкреплением. Ее особенность в том, что она дает роботу возможность самостоятельно определять лучший способ бега. Это позволяет мини-гепарду адаптироваться к различной местности, не полагаясь на анализ оператора-человека.
Мини-гепард — не самый быстрый четвероногий робот. В 2012 году его более крупный брат-гепард достиг максимальной скорости 45,5 км/ч. Но новый мини-гепард, разработанный Лабораторией искусственного интеллекта MIT и Институтом искусственного интеллекта и фундаментальных взаимодействий (IAIFI) Национального научного фонда, намного проворнее и способен учиться самостоятельно.
Обычно движение робота контролируется системой, которая использует данные, основанные на анализе движения механических конечностей.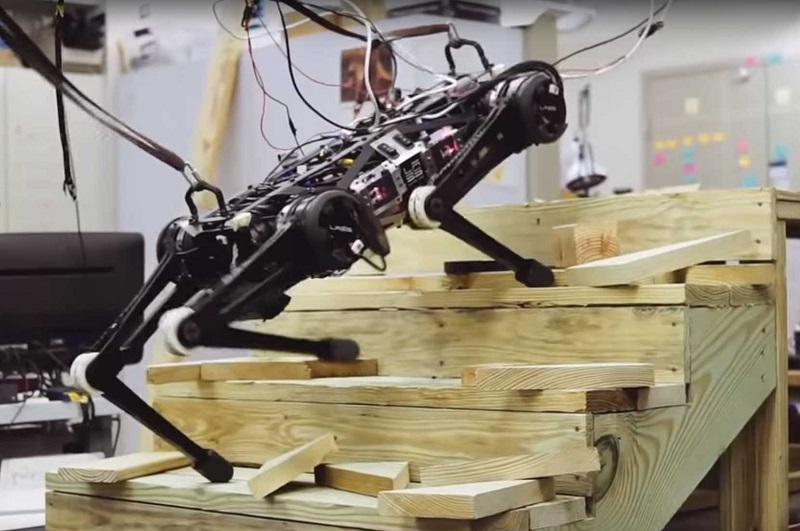 Она создает модели, на которые ориентируется робот. Однако, они зачастую неэффективны и неадекватны, отмечают авторы разработки.
Она создает модели, на которые ориентируется робот. Однако, они зачастую неэффективны и неадекватны, отмечают авторы разработки.
В ходе недавних экспериментов четвероногий робот врезался в препятствия и восстанавливался и бежал с одной выведенной из строя ногой (она имитировала ситуацию с оторванной конечностью). Также он адаптировался к скользкой, обледенелой местности и мчался по холмам из рыхлого гравия. Такая адаптивность достигается благодаря нейронной сети. Она оценивает новые ситуации, которые могут подвергнуть ее аппаратную часть сильному стрессу.
Читать далее
Ученые нашли самых здоровых людей на Земле: все дело в уникальном образе жизни
Опасность бесплатных VPN. Почему их нельзя скачивать и как защитить себя?
Почему их нельзя скачивать и как защитить себя?
Физики воссоздали способности Т-1000 из «Терминатора-2» в лаборатории
Читать ещё
Поздравляем, вы оформили подписку на дайджест Хайтека! Проверьте вашу почту
Спасибо, Ваше сообщение успешно отправлено.
Мини-гепард — первый четвероногий робот, совершивший сальто назад | Новости Массачусетского технологического института
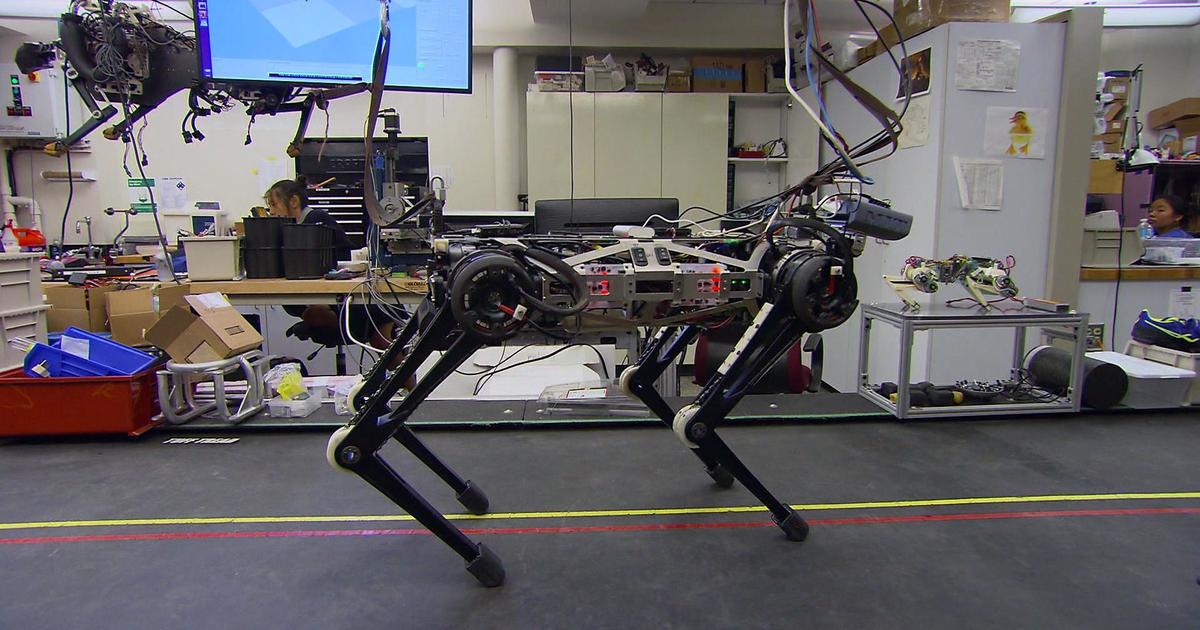
Новый мини-робот-гепард Массачусетского технологического института упруг и легок на лапах, а его диапазон движений может соперничать с гимнастом-чемпионом. Четвероногий силовой агрегат может сгибать и широко размахивать ногами, что позволяет ему ходить как правой, так и вверх ногами. Робот также может передвигаться по неровной местности примерно в два раза быстрее, чем скорость ходьбы среднего человека.
При весе всего 20 фунтов (легче, чем некоторые индейки на День Благодарения) гибкое четвероногое животное не является пустяком: когда его пинают на землю, робот может быстро выпрямиться быстрым движением локтей, напоминающим кунг-фу.
Возможно, наиболее впечатляющей является его способность выполнять сальто назад на 360 градусов из положения стоя. Исследователи утверждают, что мини-гепард спроектирован так, чтобы быть «практически неразрушимым», восстанавливаясь с небольшими повреждениями, даже если сальто назад заканчивается разливом.
В случае поломки конечности или мотора мини-гепард спроектирован с учетом модульности: каждая нога робота приводится в действие тремя идентичными недорогими электродвигателями, которые исследователи разработали с использованием готовых деталей. . Каждый двигатель можно легко заменить на новый.
«Вы можете собрать эти части вместе, почти как лего», — говорит ведущий разработчик Бенджамин Кац, технический сотрудник отдела машиностроения Массачусетского технологического института.
Исследователи представят дизайн мини-гепарда на Международной конференции по робототехнике и автоматизации в мае. В настоящее время они строят больше четвероногих машин, стремясь создать набор из 10 штук, каждую из которых они надеются передать другим лабораториям.
«Большая часть того, почему мы создали этого робота, заключается в том, что с ним так легко экспериментировать и просто пробовать сумасшедшие вещи, потому что робот очень прочный и его нелегко сломать, а если он и сломается, то легко и не ремонтировать очень дорого», — говорит Кац, работавший над роботом в лаборатории Санбэ Кима, доцента кафедры машиностроения.
Ким говорит, что передача мини-гепардов другим исследовательским группам дает инженерам возможность протестировать новые алгоритмы и маневры на высокодинамичном роботе, к которым у них иначе не было бы доступа.
«В конце концов, я надеюсь, у нас получится устроить собачью гонку роботов через полосу препятствий, где каждая команда будет управлять мини-гепардом с помощью разных алгоритмов, и мы сможем увидеть, какая стратегия более эффективна», — говорит Ким. «Вот как вы ускоряете исследования».
«Динамический материал»
Мини-гепард — это больше, чем просто миниатюрная версия своего предшественника, Гепарда 3, большого, тяжелого, грозного робота, которого часто нужно стабилизировать тросами, чтобы защитить его дорогие детали, изготовленные по индивидуальному заказу.
«В Cheetah 3 все очень интегрировано, поэтому, если вы хотите что-то изменить, вам придется сделать массу изменений в дизайне», — говорит Кац. «Принимая во внимание, что с мини-гепардом, если вы хотите добавить еще одну руку, вы можете просто добавить еще три или четыре таких модульных двигателя».
Кац разработал конструкцию электродвигателя, изменив конфигурацию деталей на небольшие коммерчески доступные двигатели, обычно используемые в дронах и самолетах с дистанционным управлением.
Каждый из 12 двигателей робота имеет размер крышки банки Мейсона и состоит из: статора или набора катушек, который создает вращающееся магнитное поле; небольшой контроллер, который передает величину тока, который должен производить статор; ротор, облицованный магнитами, который вращается вместе с полем статора, создавая крутящий момент для подъема или вращения конечности; редуктор с передаточным отношением 6:1, что позволяет ротору развивать в шесть раз больший крутящий момент, чем обычно; и датчик положения, который измеряет угол и ориентацию двигателя и связанной с ним конечности.
Каждая нога приводится в движение тремя моторами, что дает ей три степени свободы и огромный диапазон движений. Легкая конструкция с высоким крутящим моментом и малой инерцией позволяет роботу выполнять быстрые, динамичные маневры и оказывать сильное воздействие на землю, не ломая редукторы или конечности.
«Скорость, с которой он может изменять силы на земле, очень высока, — говорит Кац. «Когда он бежит, его ноги находятся на земле всего около 150 миллисекунд за раз, в течение которых компьютер говорит ему увеличить усилие на ногу, затем изменить его для равновесия, а затем очень быстро уменьшить это усилие, чтобы подняться. вверх. Таким образом, он может делать действительно динамичные вещи, например, прыгать в воздухе с каждым шагом или бегать двумя ногами по земле за раз. Большинство роботов не способны на это, поэтому двигайтесь намного медленнее».
Переворачивание
Инженеры выполнили ряд маневров на мини-гепарде, сначала проверяя его ходовые качества по коридорам лаборатории Паппалардо Массачусетского технологического института и по слегка неровной земле Киллиан Корт.
В обеих средах четвероногое двигалось со скоростью около 5 миль в час. Суставы робота способны вращаться в три раза быстрее, с вдвое большим крутящим моментом, и, по оценке Каца, робот может работать примерно в два раза быстрее при небольшой настройке.
Команда написала еще один компьютерный код, чтобы заставить робота растягиваться и скручиваться в различных конфигурациях, подобных йоге, демонстрируя диапазон его движений и способность вращать конечности и суставы при сохранении равновесия. Они также запрограммировали робота на восстановление после неожиданной силы, такой как удар в сторону. Когда исследователи пнули робота на землю, он автоматически отключился.
«Предполагается, что что-то ужасное пошло не так, поэтому он просто выключается, и все ноги летят куда угодно», — говорит Кац.
Когда он получает сигнал о перезапуске, робот сначала определяет свою ориентацию, затем выполняет заранее запрограммированный маневр приседания или поворота локтя, чтобы встать на четвереньки.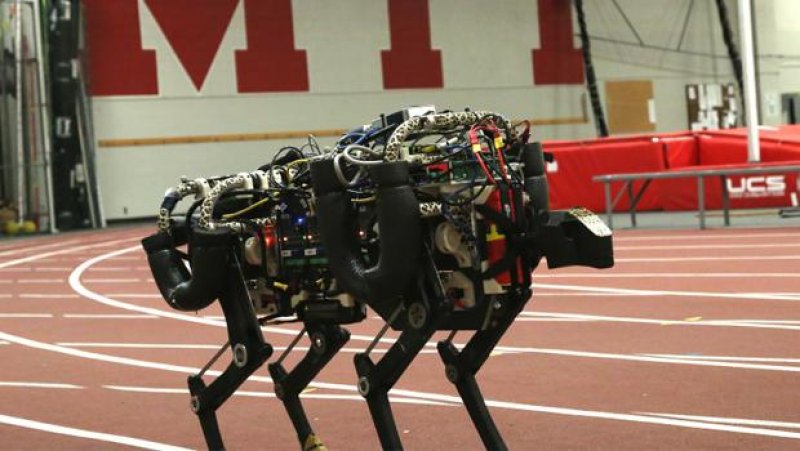
Кац и соавтор Джаред Ди Карло, студент факультета электротехники и компьютерных наук (EECS), задались вопросом, сможет ли робот выполнять еще более мощные маневры. Вдохновленные уроком, который они прошли в прошлом году, который вел профессор EECS Расс Тедрейк, они приступили к программированию мини-гепарда для выполнения сальто назад.
«Мы подумали, что это будет хорошая проверка производительности робота, потому что он потребляет много энергии, крутящего момента, а в конце сальто возникают сильные удары, — говорит Кац.
Команда написала «гигантскую, нелинейную автономную оптимизацию траектории», которая включала в себя динамику робота и возможности привода, а также определяла траекторию, по которой робот начинал с определенной ориентации вправо-вверх и в конечном итоге переворачивался 360 градусов. Затем разработанная ими программа решала все крутящие моменты, которые необходимо было приложить к каждому суставу, от каждого отдельного двигателя и в каждый период времени между началом и концом, чтобы выполнить сальто назад.
«В первый раз, когда мы попробовали это, это чудесным образом сработало, — говорит Кац.
«Это очень интересно», — добавляет Ким. «Представьте, что Cheetah 3 делает сальто назад — он разобьется и, вероятно, разрушит беговую дорожку. Мы могли бы сделать это с помощью мини-гепарда на рабочем столе».
Команда строит еще около 10 мини-гепардов, каждого из которых они планируют передать в аренду сотрудничающим группам, и Ким намеревается сформировать исследовательский консорциум инженеров по мини-гепардам, которые могут изобретать, обмениваться и даже конкурировать с новыми идеями.
Тем временем команда Массачусетского технологического института разрабатывает еще один, еще более мощный маневр.
«Сейчас мы работаем над контроллером приземления, идея в том, что я хочу иметь возможность поднять робота и подбросить его, чтобы он просто приземлился на ноги», — говорит Кац. «Скажем, вы хотели бросить робота в окно здания и заставить его исследовать здание. Ты мог бы это сделать.
3 вопроса: Как мини-гепард из Массачусетского технологического института учится бегать | Новости Массачусетского технологического института
Ученые CSAIL придумали конвейер обучения для четвероногого робота, который учится бегать исключительно путем проб и ошибок в моделировании.
Смотреть видео
Рэйчел Гордон
|
MIT CSAIL
Дата публикации:
Запросы для прессы
Контакты для прессы:
Подпись:
Мини-гепард Массачусетского технологического института, использующий систему обучения с подкреплением без моделей, побил рекорд по самому быстрому зарегистрированному пробегу.
Кредиты:
Фото предоставлено MIT CSAIL.
Прошло примерно 23 года с тех пор, как один из первых животных-роботов появился на сцене, бросив вызов классическим представлениям о наших милых четвероногих друзьях. С тех пор шквал ходячих, танцующих и открывающих двери машин управлял их присутствием, гладкой смесью батарей, датчиков, металла и двигателей. В списке кардиоупражнений отсутствовало одно, которое любили и ненавидели люди (в зависимости от того, кого вы спросите), и которое оказалось немного сложнее для ботов: научиться бегать.
С тех пор шквал ходячих, танцующих и открывающих двери машин управлял их присутствием, гладкой смесью батарей, датчиков, металла и двигателей. В списке кардиоупражнений отсутствовало одно, которое любили и ненавидели люди (в зависимости от того, кого вы спросите), и которое оказалось немного сложнее для ботов: научиться бегать.
Исследователи из лаборатории невероятного ИИ Массачусетского технологического института, входящей в состав Лаборатории компьютерных наук и искусственного интеллекта (CSAIL) под руководством доцента Массачусетского технологического института Пулкита Агравала, а также Института ИИ и фундаментальных взаимодействий (IAIFI) быстро работают над темпы для роботизированного мини-гепарда, а их система обучения с подкреплением без использования моделей побила рекорд по самому быстрому зарегистрированному бегу. Здесь аспирант Массачусетского технологического института Габриэль Марголис и постдоктор IAIFI Ге Ян обсуждают, насколько быстро может бегать гепард.
В: Мы уже видели видеоролики о работе роботов. Почему бегать тяжелее, чем ходить?
A: Для достижения высокой скорости необходимо довести аппаратные средства до предела, например, работая с максимальным выходным крутящим моментом двигателей. В таких условиях динамику робота сложно смоделировать аналитически. Робот должен быстро реагировать на изменения в окружающей среде, например, когда он сталкивается со льдом во время бега по траве. Если робот идет, он движется медленно, и наличие снега обычно не является проблемой. Представьте, если бы вы шли медленно, но осторожно: вы можете пересечь почти любую местность. Сегодняшние роботы сталкиваются с аналогичной проблемой. Проблема в том, что передвигаться по любой местности, как если бы вы шли по льду, очень неэффективно, но это распространено среди современных роботов. Люди быстро бегают по траве и замедляются по льду — мы приспосабливаемся. Предоставление роботам аналогичной способности к адаптации требует быстрой идентификации изменений местности и быстрой адаптации для предотвращения падения робота. Таким образом, поскольку нецелесообразно заранее строить аналитические (разработанные человеком) модели всех возможных ландшафтов, а динамика робота становится более сложной при высоких скоростях, бег на высокой скорости более сложен, чем ходьба.
Таким образом, поскольку нецелесообразно заранее строить аналитические (разработанные человеком) модели всех возможных ландшафтов, а динамика робота становится более сложной при высоких скоростях, бег на высокой скорости более сложен, чем ходьба.
Воспроизвести видео
Мини-гепард из Массачусетского технологического института учится бегать быстрее, чем когда-либо, используя конвейер обучения, полностью основанный на методе проб и ошибок в моделировании.
Q: Предыдущие гибкие беговые контроллеры для MIT Cheetah 3 и mini Cheetah, а также для роботов Boston Dynamics «разработаны аналитически», полагаясь на инженеров-людей для анализа физики передвижения, формулирования эффективных абстракций и внедрить специализированную иерархию контроллеров, чтобы робот балансировал и работал. Вы используете «модель обучения на собственном опыте» вместо того, чтобы программировать ее. Почему?
A: Запрограммировать поведение робота в каждой возможной ситуации просто очень сложно. Этот процесс утомителен, потому что, если робот выйдет из строя на определенной местности, инженеру-человеку потребуется определить причину отказа и вручную настроить контроллер робота, а этот процесс может потребовать значительного человеческого времени. Обучение методом проб и ошибок избавляет человека от необходимости точно указывать, как робот должен вести себя в каждой ситуации. Это будет работать, если: (1) робот может работать в чрезвычайно широком диапазоне ландшафтов; и (2) робот может автоматически улучшать свое поведение с опытом.
Этот процесс утомителен, потому что, если робот выйдет из строя на определенной местности, инженеру-человеку потребуется определить причину отказа и вручную настроить контроллер робота, а этот процесс может потребовать значительного человеческого времени. Обучение методом проб и ошибок избавляет человека от необходимости точно указывать, как робот должен вести себя в каждой ситуации. Это будет работать, если: (1) робот может работать в чрезвычайно широком диапазоне ландшафтов; и (2) робот может автоматически улучшать свое поведение с опытом.
Благодаря современным инструментам моделирования наш робот может накопить 100-дневный опыт работы на различных ландшафтах всего за три часа реального времени. Мы разработали подход, с помощью которого поведение робота улучшается на основе смоделированного опыта, и наш подход также позволяет успешно применять эти изученные модели поведения в реальном мире. Интуиция, объясняющая, почему навыки бега робота хорошо работают в реальном мире, такова: из всех сред, которые он видит в этом симуляторе, некоторые из них обучают навыкам робота, которые полезны в реальном мире. При работе в реальном мире наш контроллер определяет и выполняет соответствующие навыки в режиме реального времени.
При работе в реальном мире наш контроллер определяет и выполняет соответствующие навыки в режиме реального времени.
Вопрос: Можно ли масштабировать этот подход за пределы мини-гепарда? Что вас волнует в его будущих приложениях?
A: В основе исследований искусственного интеллекта лежит поиск компромисса между тем, что человек должен создать (природа), и тем, что машина может изучить самостоятельно (воспитать). Традиционная парадигма робототехники заключается в том, что люди указывают роботу, какую задачу выполнять и как ее выполнять. Проблема в том, что такая структура не является масштабируемой, потому что потребуются огромные инженерные усилия, чтобы вручную запрограммировать робота с навыками для работы в самых разных средах. Более практичный способ создать робота с множеством разнообразных навыков — сказать роботу, что делать, и дать ему понять, как это сделать. Наша система тому пример. В нашей лаборатории мы начали применять эту парадигму к другим роботизированным системам, включая руки, которые могут брать и манипулировать многими различными объектами.
Эта работа была поддержана программой DARPA Machine Common Sense, Лабораторией биомиметической робототехники Массачусетского технологического института, NAVER LABS и частично Институтом фундаментальных взаимодействий искусственного интеллекта Национального научного фонда, Ускорителем искусственного интеллекта ВВС США и Массачусетского технологического института. Лаборатория искусственного интеллекта Watson MIT-IBM. Исследование провела лаборатория Improbable AI Lab.
Поделитесь этой новостной статьей:
Упоминания в прессе
Mashable
Миниатюрного робота-гепарда Массачусетского технологического института научили продолжать использовать симуляцию, сообщает Эммет Смит для Машируемый . «Робот смог заблокировать 87,5% сделанных бросков, что чуть выше, чем у лучших профессиональных вратарей английской премьер-лиги», — пишет Смит.
Полная история через Mashable →
TechCrunch
В новой статье исследователи Массачусетского технологического института подробно описывают использование обучения с подкреплением для обучения мини-гепарда из Массачусетского технологического института играть роль вратаря в футбольном матче, сообщает Брайан Хитер для TechCrunch .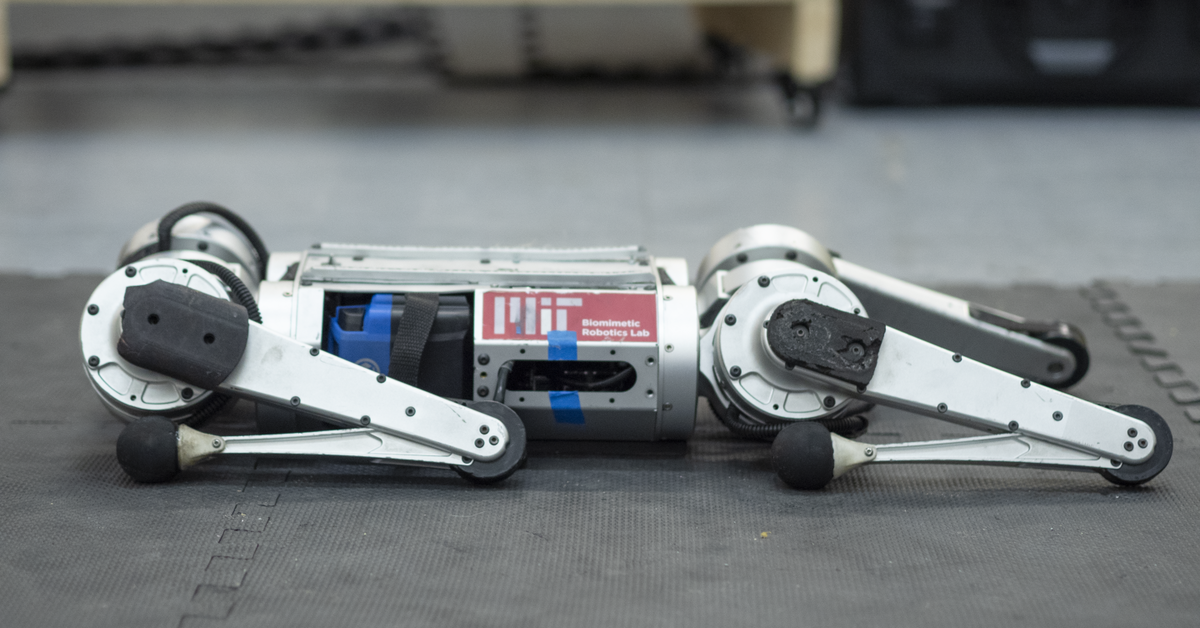 «В этой работе мы сосредоточились исключительно на задаче вратаря, но предлагаемая структура может быть расширена на другие сценарии, такие как удары по футбольному мячу с несколькими навыками», — объясняют исследователи.
«В этой работе мы сосредоточились исключительно на задаче вратаря, но предлагаемая структура может быть расширена на другие сценарии, такие как удары по футбольному мячу с несколькими навыками», — объясняют исследователи.
Полная история через TechCrunch →
Popular Mechanics
Мини-гепард Массачусетского технологического института побил рекорд скорости, научившись адаптироваться к труднопроходимой местности и увеличив свою скорость, сообщает Rienk De Beer для Popular Mechanics .
Полная история на Popular Mechanics →
Forbes
Исследователи Массачусетского технологического института разработали новую систему, позволяющую мини-роботу-гепарду научиться бегать, сообщает Джон Кетсер для Forbes . «Традиционно процесс, который люди используют [для обучения роботов], требует изучения реальной системы и ручного проектирования моделей», — объясняет профессор Пулкит Агравал.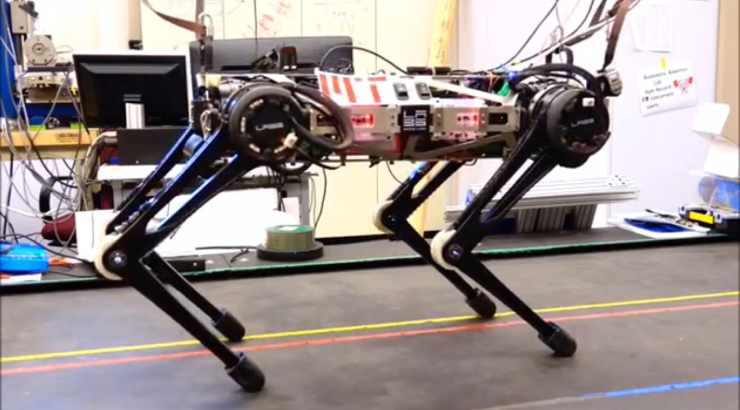 «Этот процесс хорош, он хорошо налажен, но он не очень масштабируемый. «Но мы исключаем человека из разработки конкретных моделей поведения».
«Этот процесс хорош, он хорошо налажен, но он не очень масштабируемый. «Но мы исключаем человека из разработки конкретных моделей поведения».
Полная история через Forbes →
Wired
Исследователи Массачусетского технологического института использовали новую технику обучения с подкреплением, чтобы успешно научить своего мини-робота-гепарда развивать максимальную скорость, сообщает Мэтт Саймон для Wired . «Вместо того, чтобы человек точно предписывал, как робот должен ходить, робот учится на симуляторе и опыте, чтобы, по сути, достичь способности бегать как вперед, так и назад, а также поворачивать — очень, очень быстро», — говорит аспирант Габриэль Марголис.
Полная история через Wired →
Popular Science
Исследователи Массачусетского технологического института создали новый компьютерный алгоритм, который позволил мини-гепарду максимизировать скорость на различных типах местности, сообщает Ши Эн Ким для Popular Science . «Что нас интересует, учитывая роботизированное оборудование, насколько быстро [робот] может двигаться?» говорит профессор Пулкит Агравал. «Мы не хотели произвольно ограничивать робота».
«Что нас интересует, учитывая роботизированное оборудование, насколько быстро [робот] может двигаться?» говорит профессор Пулкит Агравал. «Мы не хотели произвольно ограничивать робота».
Полная история через Popular Science →
Mashable
Исследователи Массачусетского технологического института использовали новую систему обучения с подкреплением, чтобы научить роботов адаптироваться к сложным ландшафтам на высоких скоростях, сообщает Эммет Смит для Mashable . «После многочасовых симуляционных тренировок мини-робот-гепард из Массачусетского технологического института побил рекорд по скорости бега», — пишет Смит.
Полная история через Mashable →
Gizmodo
Gizmodo репортер Эндрю Лишевски пишет, что исследователи CSAIL разработали новую систему искусственного интеллекта, чтобы научить мини-гепарда MIT адаптировать свою походку, позволяя ему научиться бегать.