Содержание
Гуманоидный робот — HiSoUR История культуры
Человекоподобный робот — это робот с его формой тела, подобранной человеческим телом. Дизайн может быть предназначен для функциональных целей, таких как взаимодействие с человеческими инструментами и средами, для экспериментальных целей, таких как изучение алломоции или для других целей. В общем, у гуманоидных роботов есть туловище, голова, две руки и две ноги, хотя некоторые формы гуманоидных роботов могут моделировать только часть тела, например, от талии вверх. У некоторых гуманоидных роботов также есть головы, предназначенные для воспроизведения человеческих черт лица, таких как глаза и рты. Андроиды — это гуманоидные роботы, созданные для эстетического восприятия людей.
Цель
человекоподобные роботы в настоящее время используются в качестве инструментов исследования в нескольких научных областях. Исследователи изучают структуру и поведение человеческого тела (биомеханика) для создания человекоподобных роботов. С другой стороны, попытка имитировать тело человека ведет к лучшему пониманию этого. Человеческое познание — это область изучения, в которой основное внимание уделяется тому, как люди учатся из сенсорной информации, чтобы приобрести перцептивные и моторные навыки. Эти знания используются для разработки вычислительных моделей поведения человека и со временем улучшаются.
Человеческое познание — это область изучения, в которой основное внимание уделяется тому, как люди учатся из сенсорной информации, чтобы приобрести перцептивные и моторные навыки. Эти знания используются для разработки вычислительных моделей поведения человека и со временем улучшаются.
Было высказано предположение, что очень продвинутая роботизация будет способствовать улучшению обычных людей. См. Трансгуманизм.
Хотя первоначальной целью гуманоидных исследований было создание лучшего ортеза и протеза для людей, знания были переданы между двумя дисциплинами. Несколько примеров — это протез на ногах для нервно-мышечных нарушений, ортез лодыжки и стопы, биологически реалистичный протез ног и протез предплечья.
Помимо исследования, роботы-гуманоиды разрабатываются для выполнения человеческих задач, таких как личная помощь, с помощью которых они могут помочь больным и пожилым людям, а также грязным или опасным работам. Гуманоиды также подходят для некоторых процедурных богослужений, таких как администраторы приемной администрации и работники автомобильной промышленности. По сути, поскольку они могут использовать инструменты и управлять оборудованием и транспортными средствами, предназначенными для человеческой формы, гуманоиды могут теоретически выполнять любую задачу, которую может сделать человек, если у них есть надлежащее программное обеспечение. Однако сложность этого огромна.
По сути, поскольку они могут использовать инструменты и управлять оборудованием и транспортными средствами, предназначенными для человеческой формы, гуманоиды могут теоретически выполнять любую задачу, которую может сделать человек, если у них есть надлежащее программное обеспечение. Однако сложность этого огромна.
Они также становятся все более популярными как артисты. Например, Урсула, женский робот, поет, играет музыку, танцует и говорит своим зрителям в Universal Studios. Несколько тематических парков Disney используют аниматронные роботы, которые выглядят, двигаются и говорят так же, как люди. Хотя эти роботы выглядят реалистично, у них нет никакой познавательной или физической автономии. Различные роботы-гуманоиды и их возможные применения в повседневной жизни представлены в независимом документальном фильме под названием Plug & Pray, который был выпущен в 2010 году.
Гуманоидные роботы, особенно те, которые имеют алгоритмы искусственного интеллекта, могут быть полезны для будущих опасных и / или отдаленных миссий по исследованию космоса, без необходимости снова поворачиваться назад и возвращаться на Землю после завершения миссии.
Датчики
Датчик — это устройство, которое измеряет некоторые атрибуты мира. Будучи одним из трех примитивов робототехники (помимо планирования и контроля), чувствительность играет важную роль в роботизированных парадигмах.
Датчики могут быть классифицированы в соответствии с физическим процессом, с которым они работают, или в соответствии с типом информации измерений, которую они дают в качестве выхода. В этом случае использовался второй подход.
Проприоцептивные датчики
Проприоцептивные датчики определяют положение, ориентацию и скорость тела и суставов гуманоида.
У людей отолиты и полукруглые каналы (во внутреннем ухе) используются для поддержания баланса и ориентации. Кроме того, люди используют свои собственные проприоцептивные датчики (например, прикосновение, растяжение мышц, положение конечности), чтобы помочь с их ориентацией. Гуманоидные роботы используют акселерометры для измерения ускорения, из которых скорость может быть рассчитана путем интегрирования; датчики наклона для измерения наклона; датчики силы, размещенные в руках и ногах робота для измерения силы контакта с окружающей средой; которые указывают фактическое положение робота (из которого скорость может быть рассчитана путем деривации) или даже датчики скорости.
Экстероцептивные датчики
Массивы тактов могут использоваться для предоставления данных о том, что было затронуто. Shadow Hand использует массив из 34 тактов, расположенных под его полиуретановой кожей на каждом кончике пальца. Тактильные датчики также предоставляют информацию о силах и моментах, передаваемых между роботом и другими объектами.
Видение относится к обработке данных из любой модальности, которая использует электромагнитный спектр для создания изображения. В человекоподобных роботах он используется для распознавания объектов и определения их свойств. Датчики зрения работают наиболее похоже на глаза людей. Большинство человекоподобных роботов используют ПЗС-камеры в качестве датчиков зрения.
Звуковые датчики позволяют роботам-гуманоидам слышать речь и звуки окружающей среды, а также выполнять как уши человека. Для этой задачи обычно используются микрофоны.
Приводы
Приводы — это двигатели, ответственные за движение в роботе.
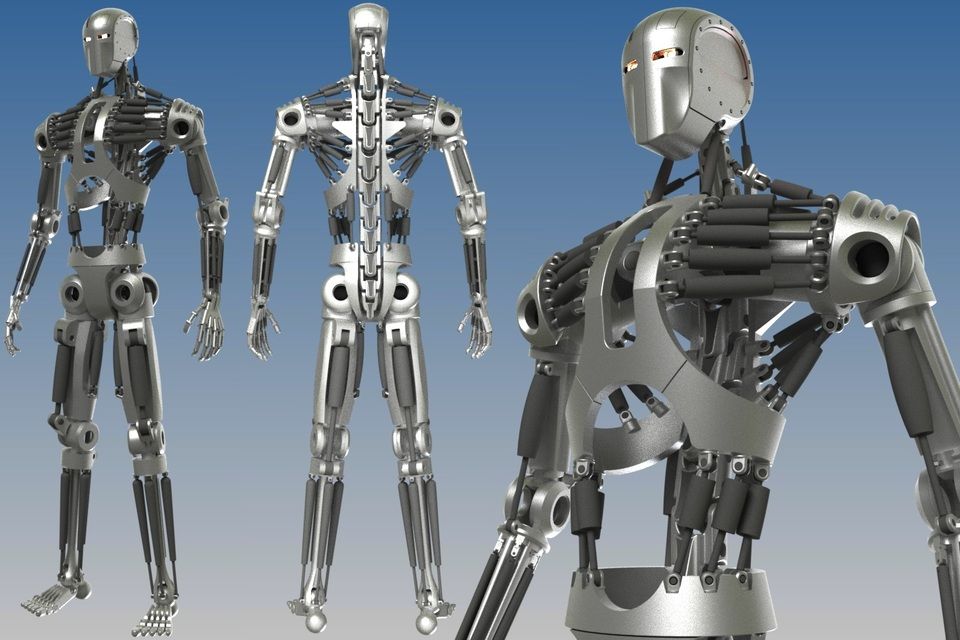
Гуманоидные роботы построены таким образом, что имитируют человеческое тело, поэтому они используют приводы, которые выполняют, как мышцы и суставы, хотя и с другой структурой.![]() Чтобы достичь такого же эффекта, как движение человека, роботы-гуманоиды используют главным образом поворотные приводы. Они могут быть электрическими, пневматическими, гидравлическими, пьезоэлектрическими или ультразвуковыми.
Чтобы достичь такого же эффекта, как движение человека, роботы-гуманоиды используют главным образом поворотные приводы. Они могут быть электрическими, пневматическими, гидравлическими, пьезоэлектрическими или ультразвуковыми.
Гидравлические и электрические приводы имеют очень жесткое поведение и могут быть сделаны только для того, чтобы действовать соответствующим образом с использованием относительно сложных стратегий управления с обратной связью. В то время как электрические бескорпусные двигательные приводы лучше подходят для высокоскоростных и малонагруженных применений, гидравлические работают хорошо при низких скоростях и при высоких нагрузках.
Пьезоэлектрические приводы генерируют небольшое движение с высокой силой при подаче напряжения. Они могут использоваться для сверхточного позиционирования и для создания и обработки высоких сил или давлений в статических или динамических ситуациях.
Ультразвуковые приводы предназначены для создания движений в порядке микрометра на ультразвуковых частотах (более 20 кГц). Они полезны для контроля вибрации, позиционирования и быстрого переключения.
Они полезны для контроля вибрации, позиционирования и быстрого переключения.
Пневматические приводы работают на основе сжимаемости газа. Поскольку они раздуты, они расширяются вдоль оси, и когда они сдуваются, они сжимаются. Если один конец зафиксирован, другой будет двигаться по линейной траектории. Эти приводы предназначены для приложений с низкой скоростью и низкой / средней нагрузкой. Между пневматическими приводами имеются: цилиндры, сильфоны, пневматические двигатели, пневматические шаговые двигатели и пневматические искусственные мышцы.
Планирование и контроль.
При планировании и контроле существенное различие между гуманоидами и другими видами роботов (например, промышленными) заключается в том, что движение робота должно быть человеческим, с использованием локтевого движения, особенно двуногая походка. Идеальное планирование человекоподобных движений при нормальной ходьбе должно приводить к минимальному потреблению энергии, как это происходит в организме человека. По этой причине исследования динамики и контроля над этими структурами становятся все более важными.
По этой причине исследования динамики и контроля над этими структурами становятся все более важными.
Вопрос о стабилизации биполярных роботов на поверхности имеет большое значение. Поддержание центра тяжести робота над центром области подшипника для обеспечения стабильного положения может быть выбрано в качестве цели контроля.
Чтобы поддерживать динамический баланс во время прогулки, роботу нужна информация о контактной силе и ее текущем и желаемом движении. Решение этой проблемы опирается на основную концепцию — точку Zero Moment Point (ZMP).
Еще одна характеристика роботов-гуманоидов заключается в том, что они перемещаются, собирают информацию (используя датчики) в «реальном мире» и взаимодействуют с ней. Они не остаются неподвижными, как фабричные манипуляторы и другие роботы, работающие в высокоструктурированных средах. Чтобы гуманоиды могли перемещаться в сложных условиях, планирование и контроль должны фокусироваться на обнаружении самоконтроля, планировании пути и предотвращении препятствий.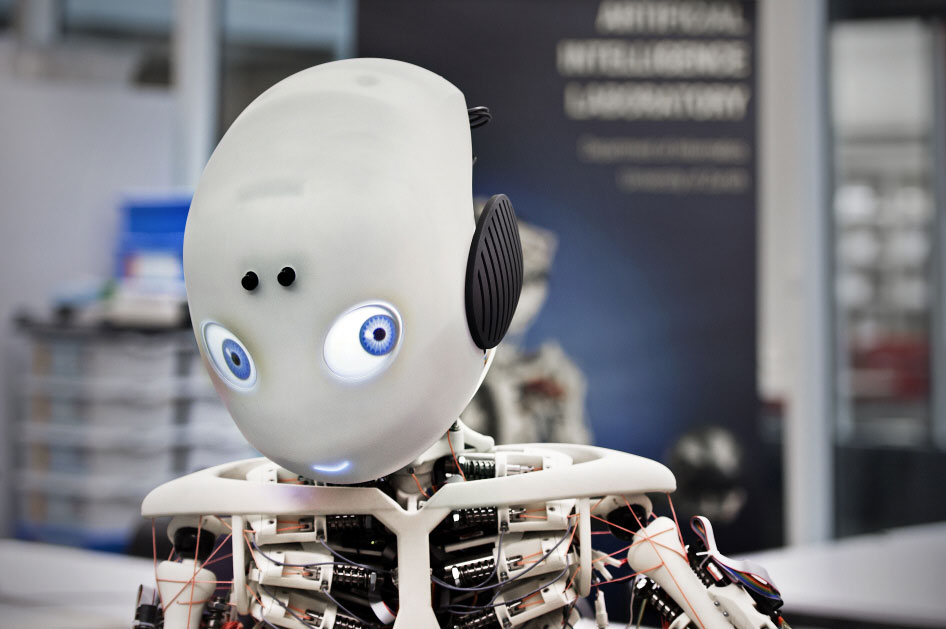
Гуманоидные роботы еще не обладают некоторыми особенностями человеческого тела. Они включают структуры с переменной гибкостью, которые обеспечивают безопасность (для самого робота и для людей) и избыточность движений, то есть больше степеней свободы и, следовательно, широкую доступность задач. Хотя эти характеристики желательны для гуманоидных роботов, они принесут больше сложностей и новых проблем для планирования и контроля. Область контроля всего тела имеет дело с этими проблемами и направлена на надлежащую координацию многочисленных степеней свободы, например, для одновременного выполнения нескольких задач управления при соблюдении определенного порядка приоритета.
Исследования и разработки
Развитие роботов-гуманоидов основано на двух основных мотивах:
Искусственный интеллект
Сегодня многие ученые полагают, что создание функционального гуманоидного робота является основой для создания человеческого искусственного интеллекта (ИИ). Согласно этой точке зрения, AI не может быть легко запрограммирован, но является результатом процесса обучения. Эта точка зрения основана на наблюдениях в области обучения психологии. Робот с ИИ должен активно участвовать в общественной жизни человека и учиться наблюдениям, взаимодействию и коммуникации. Основой коммуникации является лежащая в основе мотивация обеих сторон, которая по крайней мере первоначально похожа на то, что происходит в отношениях между родителем и ребенком. ИИ робота может развиваться оптимально только в том случае, если он уже признан в своей минимальной функциональности как эквивалентное существо. Для этого он должен иметь человеческую форму, мобильность и датчики. Поэтому нынешняя цель — качественная техническая копия человеческой физиологии. Эта особая технологическая задача приводит к тому, что отдельные исследовательские группы работают вместе над сложными суб-аспектами. Примеры включают Лабораторию ног Массачусетского технологического института, роботизированный проект робота-гуманоида и проект AI Kismet.
Эта точка зрения основана на наблюдениях в области обучения психологии. Робот с ИИ должен активно участвовать в общественной жизни человека и учиться наблюдениям, взаимодействию и коммуникации. Основой коммуникации является лежащая в основе мотивация обеих сторон, которая по крайней мере первоначально похожа на то, что происходит в отношениях между родителем и ребенком. ИИ робота может развиваться оптимально только в том случае, если он уже признан в своей минимальной функциональности как эквивалентное существо. Для этого он должен иметь человеческую форму, мобильность и датчики. Поэтому нынешняя цель — качественная техническая копия человеческой физиологии. Эта особая технологическая задача приводит к тому, что отдельные исследовательские группы работают вместе над сложными суб-аспектами. Примеры включают Лабораторию ног Массачусетского технологического института, роботизированный проект робота-гуманоида и проект AI Kismet.
Многофункциональная рабочая машина
Экономичные коммерческие или спонсируемые правительством проекты роботов-гуманоидов доказывают высокую ожидаемость будущей экономической жизнеспособности таких систем. Человеческая среда обитания (здания, транспортные средства, инструменты или устройства) экономически ориентирована по соображениям затрат и особенно ориентирована на физиологию человека. Массовый, многофункциональный робот-робот-робот-гуманоид избавляет от необходимости производить, распространять и развлекать множество специальных роботов. Это может быть сделано легко, особенно с помощью нескольких сложных операций. Людям должен помогать многофункциональный помощник, который избавляет их от времени, работы или времени в своей среде или предоставляет развлечения. В Японии, как и в Германии, наблюдается сильное старение населения. Надеюсь, Благодаря постоянному использованию этих универсалов для поддержки пожилых людей в повседневной жизни или для облегчения ухода за больными. Чтобы повысить признание роботов в обществе, исследует лабораторию социально-интеллектуальных машин Технологического института Джорджии по социальным навыкам гуманоидных роботов.
Человеческая среда обитания (здания, транспортные средства, инструменты или устройства) экономически ориентирована по соображениям затрат и особенно ориентирована на физиологию человека. Массовый, многофункциональный робот-робот-робот-гуманоид избавляет от необходимости производить, распространять и развлекать множество специальных роботов. Это может быть сделано легко, особенно с помощью нескольких сложных операций. Людям должен помогать многофункциональный помощник, который избавляет их от времени, работы или времени в своей среде или предоставляет развлечения. В Японии, как и в Германии, наблюдается сильное старение населения. Надеюсь, Благодаря постоянному использованию этих универсалов для поддержки пожилых людей в повседневной жизни или для облегчения ухода за больными. Чтобы повысить признание роботов в обществе, исследует лабораторию социально-интеллектуальных машин Технологического института Джорджии по социальным навыкам гуманоидных роботов.
Сроки развития
| Год | развитие |
|---|---|
с.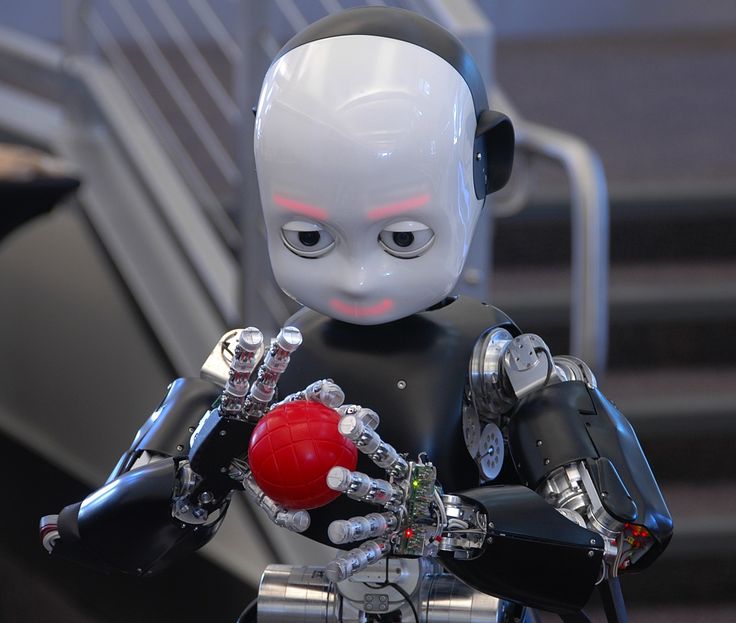 250 до н. 250 до н. | Лецзы описал автомат. |
| с. 50 AD | Греческий математик Герой Александрийского описал машину, которая автоматически наливает вино для гостей вечеринки. |
| 1206 | Аль-Джазари описал группу, составленную из гуманоидных автоматов, которая, по словам Чарльза Б. Фаулера, выполняла «более пятидесяти действий лица и тела во время каждого музыкального отбора». Аль-Джазари также создал автоматические ручные стиральные автоматы с автоматическими гуманоидными слугами и часы-слоны, включающие автоматический гуманоидный махот, поражающий тарелку в полчаса. Его программируемые «часы замка» также показывали пять музыкальных автоматов, которые автоматически воспроизводили музыку при перемещении рычагами, которыми управляет скрытый распределительный вал, прикрепленный к водяному колесу. |
| 1495 | Леонардо да Винчи разрабатывает гуманоидный автомат, который выглядит как бронированный рыцарь, известный как робот Леонардо. |
| 1738 | Жак де Ваукансон строит флейтист, фигуру в натуральную величину пастуха, которая может сыграть двенадцать песен на флейте и «Игрок тамбурина», сыгравший на флейте, барабане или тамбурине. |
| 1774 | Пьер Жаке-Дроз и его сын Анри-Луи создали рисовальщика, музыканта и писателя, фигуры мальчика, который мог писать сообщения длиной до 40 символов. |
| 1898 | Никола Тесла публично демонстрирует свою технологию «автоматов», проводя беспроводное управление модельной лодкой на электротехнической выставке, проводимой в Мэдисон-Сквер-Гарден в Нью-Йорке в разгар испанско-американской войны. |
| 1921 | Чешский писатель Карел Чапек ввел слово «робот» в свою пьесу « Румс» (универсальные роботы Россума) . Слово «робот» происходит от слова «робота», то есть на чешском и польском языке «труд, тяжесть». |
| 1927 | «Maschinenmensch» («машинный человек»), гинеоидный гуманоидный робот, также называемый «Пародия», «Футура», «Роботрикс» или «Мастеровский имитатор» (играет немецкая актриса Бриджит Хелм), возможно, самый запоминающийся гуманоидный робот когда-либо появлявшийся на пленке, изображен в фильме Метрополиса Фрица Ланга. |
| 1928 | Электрический робот Эрик открывает выставку Общества модельных инженеров в лондонском Королевском садоводческом зале в Лондоне и путешествует по миру |
| 1941-42 | Исаак Азимов формулирует три закона робототехники, используемые в его научно-фантастических рассказах о роботе, и в процессе этого делает монеты словом «робототехника». |
| 1948 | Норберт Винер формулирует принципы кибернетики, основы практической робототехники. |
| 1961 | Первый цифровой и программируемый не гуманоидный робот, Unimate, установлен на сборочной линии General Motors для подъема горячих кусков металла из машины для литья под давлением и складывания их. Он был создан Джорджем Деволом и построен компанией «Унитация», первой компанией-производителем роботов. |
| 1967 — 1972 гг. | Университет Васеда начал проект WABOT в 1967 году, а в 1972 году закончил WABOT-1, первый в мире полномасштабный гуманоидный интеллектуальный робот. Это был первый андроид, способный ходить, общаться с человеком по-японски (с искусственным устьем), измерять расстояния и направления к объектам, используя внешние рецепторы (искусственные уши и глаза), а также захватывать и переносить предметы руками. Это был первый андроид, способный ходить, общаться с человеком по-японски (с искусственным устьем), измерять расстояния и направления к объектам, используя внешние рецепторы (искусственные уши и глаза), а также захватывать и переносить предметы руками. |
| 1969 | DE Whitney публикует свою статью «Разрешенный контроль скорости движения манипуляторов и человеческого протеза». |
| 1970 | Miomir Vukobratović предложил Zero Moment Point, теоретическую модель для объяснения двуногих локомоций. |
| 1972 | Миомир Вукобратович и его сотрудники в Институте Михаила Пупина строят первый активный антропоморфный экзоскелет. |
| 1980 | Марк Райберт основал лабораторию MIT Leg Lab, которая посвящена изучению локомоции и созданию динамически голодных роботов. |
| 1983 | Используя оружие MB Associates, «Гринман» был разработан Space and Naval Warfare Systems Center, Сан-Диего. Он имел контролер экзоскелета с кинематической эквивалентностью и пространственным соответствием туловища, рук и головы. Его система зрения состояла из двух 525-линейных видеокамер, каждая из которых имеет 35-градусный угол обзора и видеокамеры для наблюдения за окулярами, установленных в шлеме авиатора. Его система зрения состояла из двух 525-линейных видеокамер, каждая из которых имеет 35-градусный угол обзора и видеокамеры для наблюдения за окулярами, установленных в шлеме авиатора. |
| 1984 | В Университете Васеда создан Wabot-2, музыкант-гуманоидный робот, способный общаться с человеком, читать нормальный музыкальный балл глазами и играть мелодии средней сложности на электронном органе. |
| 1985 | WHL-11, разработанный Hitachi Ltd, представляет собой двуногий робот, способный к статической ходьбе на плоской поверхности с шагом 13 секунд на каждый шаг, а также может поворачиваться. |
| 1985 | WASUBOT — еще один музыкант-музыкант из Университета Васеда. Он выступил с концертом с симфоническим оркестром NHK на церемонии открытия Международной научно-технической выставки. |
| 1986 | Honda разработала семь двуногих роботов, которые были обозначены E0 (экспериментальная модель 0) — E6. E0 был в 1986 году, E1 — E3 проводились в период с 1987 по 1991 год, а E4 — E6 проводились в период с 1991 по 1993 год. |
| 1989 | Мэнни был полномасштабным антропоморфным роботом с 42 степенями свободы, разработанным в Тихоокеанских Северо-западных лабораториях Баттел в Ричленде, штат Вашингтон, для доказывания Dugway US Army в Юте. Он не мог ходить сам по себе, но он мог ползти и имел искусственную дыхательную систему, чтобы имитировать дыхание и потение. |
| 1990 | Тад Макгир показал, что двуногая механическая конструкция с коленями может пассивно проходить по наклонной поверхности. |
| 1993 | Honda разработала P1 (прототип модели 1) через P3, эволюция из серии E, с верхними конечностями. Разработано до 1997 года. |
| 1995 | Hadaly был разработан в Университете Васеда для изучения связи между человеком и роботом и имеет три подсистемы: подсистему «голова глаз», систему голосового управления для прослушивания и выступления на японском языке и подсистему управления движением, чтобы использовать оружие, чтобы указать на пункты назначения в кампусе. |
| 1995 | Вабиан — двуногий ходовой робот размером с человека из университета Васеда. |
| 1996 | Сайка, легкий, человеческий и недорогой гуманоидный робот, был разработан в Токийском университете. У Сайки есть две DOF шеи, двойные верхние плечи с пятью DOF, туловище и голова. В настоящее время разрабатывается несколько типов рук и предплечий. Разработано до 1998 года. |
| 1997 | Hadaly-2, разработанный в Университете Васеда, является гуманоидным роботом, который реализует интерактивное общение с людьми. Он общается не только информативно, но и физически. |
| 2000 | Хонда создает своего 11-го двуногого гуманоидного робота, способного бежать, ASIMO. |
| 2001 | Sony представляет небольшие роботы-гуманоиды, получившие название Sony Dream Robot (SDR). Переименован в Крио в 2003 году. |
| 2001 | Fujitsu реализовал свой первый коммерческий робот-гуманоид по имени HOAP-1. Его преемники HOAP-2 и HOAP-3 были объявлены в 2003 и 2005 годах, соответственно. HOAP предназначен для широкого спектра приложений для исследований и разработок робототехнических технологий. Его преемники HOAP-2 и HOAP-3 были объявлены в 2003 и 2005 годах, соответственно. HOAP предназначен для широкого спектра приложений для исследований и разработок робототехнических технологий. |
| 2002 | HRP-2, двуногий ходовой робот, созданный Научно-технологическим центром по производству (MSTC) в Токио. |
| 2003 | JOHNNIE, автономный двуногий шагающий робот, построенный в Техническом университете Мюнхена. Главная цель состояла в том, чтобы реализовать антропоморфную прогулочную машину с человекоподобной динамически устойчивой походкой. |
| 2003 | Actroid, робот с реалистичной силиконовой «кожей», разработанный Университетом Осаки совместно с компанией Kokoro Company Ltd. |
| 2004 | Персия, первый гуманоидный робот Ирана, была разработана с использованием реалистичного моделирования исследователями Исфаханского технологического университета совместно с ISTT. |
| 2004 | KHR-1, программируемый двуногий гуманоидный робот, представленный в июне 2004 года японской компанией Kondo Kagaku. |
| 2005 | PKD Android, человекоподобный робот-гуманоид, созданный по образному роману писателя-фантаста Филиппа Дика, был разработан как сотрудничество между Hanson Robotics, Технологическим институтом FedEx и Университетом Мемфиса. |
| 2005 | Wakamaru, японский отечественный робот, изготовленный Mitsubishi Heavy Industries, в первую очередь предназначен для обеспечения общения пожилых людей и людей с ограниченными возможностями. |
| 2005 | Серия Geminoid представляет собой серию ультрареалистичных гуманоидных роботов или Actroid, разработанных Хироши Ишигуро из ATR и Кокоро в Токио. Оригинальный, Geminoid HI-1 был сделан по его изображению.Далее следуют Geminoid-F в 2010 году и Geminoid-DK в 2011 году. |
| 2006 | Nao — небольшой программируемый робот-робот с открытым исходным кодом, разработанный Aldebaran Robotics во Франции. Широко используется мировыми университетами в качестве исследовательской платформы и образовательного инструмента. |
| 2006 | RoboTurk разработан и реализован доктором Давутом Акдасом и доктором Сабри Бикакчи в Университете Балыкесир. Этот исследовательский проект, спонсируемый научно-техническим советом Турции (TUBITAK) в 2006 году. RoboTurk является преемником двуногих роботов под названием «Salford Lady» и «Gonzalez» в университете Salford в Великобритании. Это первый робот-гуманоид, поддерживаемый правительством Турции. |
| 2006 | REEM-A был первым полностью автономным европейским двуногим роботом-гуманоидом, предназначенным для игры в шахматы с двигателем Hydra Chess. Первый робот, разработанный PAL Robotics, также использовался в качестве платформы для ходьбы, манипуляций, речи и развития видения. |
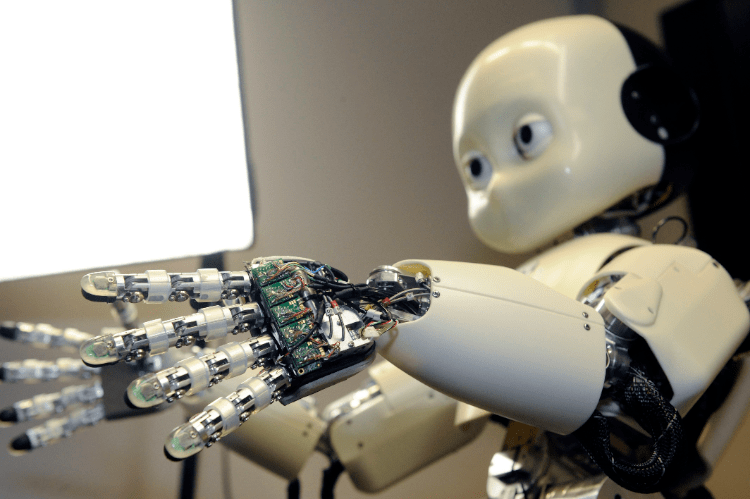
| 2006 | iCub, двуногий гуманоидный робот с открытым исходным кодом для исследований познания. |
| 2006 | Mahru, двуручный робот-робот, основанный на сети, был разработан в Южной Корее. |
| 2007 | TOPIO, игровой робот для настольного тенниса, разработанный TOSY Robotics JSC. |
| 2007 | Twendy-One, робот, разработанный лабораторией WASEDA University Sugano для оказания помощи на дому. Он не двуногий, поскольку использует всенаправленный мобильный механизм. |
| 2008 | Джастин, гуманоидный робот, разработанный Немецким аэрокосмическим центром (DLR). |
| 2008 | KT-X, первый международный робот-гуманоид, разработанный в качестве сотрудничества пятикратных последовательных чемпионов RoboCup, Team Osaka и KumoTek Robotics. |
| 2008 | Nexi, первый мобильный, ловкий и социальный робот, делает свой публичный дебют одним из главных изобретений журнала TIME года. Робот был создан благодаря сотрудничеству между MIT Media Lab Personal Robots Group, роботами UMass Amherst и Meka. |
| 2008 | Сальвий, первый робот-гуманоид с открытым исходным кодом, созданный в Соединенных Штатах. |
| 2008 | REEM-B, второй двуногий гуманоидный робот, разработанный PAL Robotics. Он обладает возможностью автономно изучать окружающую среду с использованием различных датчиков и нести 20% собственного веса. Он обладает возможностью автономно изучать окружающую среду с использованием различных датчиков и нести 20% собственного веса. |
| 2008 | Surena, этот робот был представлен 13 декабря 2008 года. Он имел высоту 165 см и вес 60 килограммов и способен говорить в соответствии с предопределенным текстом. Он также обладает возможностью дистанционного управления и отслеживания. |
| 2009 | HRP-4C, японский отечественный робот, созданный Национальным институтом передовых промышленных наук и технологий, показывает характеристики человека в дополнение к двуногим ходьбе. |
| 2009 | Первый динамично развивающийся гуманоидный робот Турции SURALP, разработанный Университетом Сабанчи совместно с Тубитаком. |
| 2009 | Кобян, робот, созданный университетом WASEDA, может ходить, говорить и имитировать эмоции. |
| 2009 | DARwIn-OP, робот с открытым исходным кодом, разработанный ROBOTIS в сотрудничестве с Virginia Tech, Университетом Пердью и Университетом Пенсильвании. Этот проект был поддержан и спонсирован NSF. Этот проект был поддержан и спонсирован NSF. |
| 2010 | NASA и General Motors показали Robonaut 2, очень продвинутый гуманоидный робот. Он был частью полезной нагрузки Shuttle Discovery на успешном запуске 24 февраля 2011 года. Он предназначен для выхода в открытый космос для NASA. |
| 2010 | Исследователи из Японского национального института передовых промышленных наук и технологий демонстрируют свои гуманоидные роботы HRP-4C, которые поют и танцуют вместе с танцорами. |
| 2010 | В сентябре Национальный институт передовых промышленных наук и технологий также демонстрирует гуманоидный робот HRP-4. HRP-4 похож на HRP-4C в некоторых отношениях, но называется «атлетическим» и не является гинеодом. |
| 2010 | REEM, робот-гуманоидный сервиз с передвижной мобильной базой. Разработанный PAL Robotics, он может выполнять автономную навигацию в различных условиях и обладает функциями распознавания голоса и лица. |
| 2011 | Робот Аурига был разработан Али Озгуном ХИРЛАКОМ и Бураком Оздемиром в 2011 году в Университете Кукурова. Auriga — первый робот, управляемый мозгом, разработанный в Турции. Аурига может обслуживать пищу и медицину, чтобы парализовать людей мыслями пациента. Технология ЭЭГ приспособлена для манипулирования роботом. Проект был поддержан правительством Турции. Auriga — первый робот, управляемый мозгом, разработанный в Турции. Аурига может обслуживать пищу и медицину, чтобы парализовать людей мыслями пациента. Технология ЭЭГ приспособлена для манипулирования роботом. Проект был поддержан правительством Турции. |
| 2011 | В ноябре Honda представила свое второе поколение Honda Asimo Robot. Все новые Asimo — первая версия робота с полуавтономными возможностями. |
| 2012 | В апреле Департамент Advanced Robotics в Италии технологического институте выпустил свою первую версию CO mpliant ху MAN подъязычной робот ЭКО , который предназначен для надежной динамической балансировки ходьбы и в пересеченной местности. |
| 2013 | 20-21 декабря 2013 года DARPA Robotics Challenge заняла первые 16 человекоподобных роботов, конкурирующих за денежный приз в размере 2 миллионов долларов США. Ведущая команда, SCHAFT, с 27 из возможного балла 30 была куплена Google. PAL Robotics запускает REEM-C первым роботом-роботом-гуманоидом, разработанным в качестве платформы исследований робототехники, на основе 100% ROS. |
| 2014 | Манав — первый в Индии трехмерный печатный гуманоидный робот, разработанный в лаборатории учебных и исследовательских институтов A-SET Дивакаром Вайшем (руководитель отдела робототехники и исследований, A-SET Training and Research Institutes). |
| 2014 | После приобретения Aldebaran SoftBank Robotics выпускает робот Pepper, доступный для всех. |
| 2015 | Надин является женским гуманоидным социальным роботом, разработанным в Технологическом университете Наньяна в Сингапуре, и смоделировал его режиссера Нади Магнатата Тальмана. Надин — это социально интеллектуальный робот, который возвращает приветствия, дает зрительный контакт и запоминает все разговоры, которые он имел. |
| 2015 | София — гуманоидный робот, разработанный «Hanson Robotics», Гонконг, и смоделированный после Одри Хепберн. В Софии есть искусственный интеллект, обработка визуальных данных и распознавание лиц. |
| 2016 | OceanOne, разработанный командой в Стэнфордском университете, возглавляемой профессором по информатике Оуссама Хатибом, завершает свою первую миссию — дайвинг для сокровищ в кораблекрушении у побережья Франции на глубине 100 метров. Робот контролируется дистанционно, имеет в своем распоряжении датчики гаптики и возможности искусственного интеллекта. Робот контролируется дистанционно, имеет в своем распоряжении датчики гаптики и возможности искусственного интеллекта. |
| 2017 | PAL Robotics запускает TALOS, полностью электрический робот-гуманоид с совместными датчиками крутящего момента и технологией связи EtherCAT, которые могут манипулировать полезной нагрузкой до 6 кг в каждом из захватов. |
Гуманоидные роботы изображены в фильмах и телевизионных шоу
21-го века. В избранных фильмах и телевизионных шоу 21-го века изображены гуманоидные роботы (иногда также называемые «синтетическими людьми» или «репликанты»), которые могут выходить за пределы «сверхъестественной долины». Некоторые из этих фильмов и телевизионных шоу изображают будущее, в котором каждый может купить робота-гуманоида, что привело к предполагаемым улучшениям во многих областях, включая уход за престарелыми и социальное общение. Эти фильмы и телевизионные шоу показывают более 60% для среднего томатометра на гнилых помидорах. Гуманоидные роботы могут считаться угрозой со стороны людей, особенно если они становятся способными имитировать человеческое сознание.
Гуманоидные роботы могут считаться угрозой со стороны людей, особенно если они становятся способными имитировать человеческое сознание.
| ТВ шоу | Средний томатометр | Дата выхода | Сезоны |
|---|---|---|---|
| Люди | 91% | 14 июня 2015 г. | 3 (по состоянию на 19/05/2018) |
| Измененный углерод | 65% | 2 февраля 2018 года | 1 (по состоянию на 19/05/2018) |
| Кино | Средний томатометр | Дата выхода |
|---|---|---|
| Экс Machina | 92% | 7 мая 2015 г. |
| Бегущий по лезвию 2049 | 87% | 5 октября 2017 года |
| Прометей | 73% | 7 июня 2012 г. |
Робот-гуманоид с реактивным ранцем поможет спастись при стихийном бедствии
09 декабря 2021
13:14
Ольга Мурая
Инженер Джорджо Метта (Giorgio Metta) со своим детищем iCub, которое стало основой для новой разработки.
Фото Giorgio Metta/Facebook.
Создатели этого милого «Железного мальца» надеются в скором времени опробовать его в воздухе.
Фото Instituto Italiano di Technologia.
Итальянские инженеры разработали человекоподобного робота, который сможет летать благодаря реактивному ранцу. Эта технология в будущем сможет лечь в основу управляемых летающих экзоскелетов.
Роботы медленно, но верно покидают пределы комфортных и предсказуемых лабораторий, в которых они были разработаны, и выходят в реальный мир.
Здесь их ждут совершенно новые трудности, в первую очередь, физические препятствия вроде ступеней, случайно расположенных предметов, заграждающих путь, или просто неровной дороги.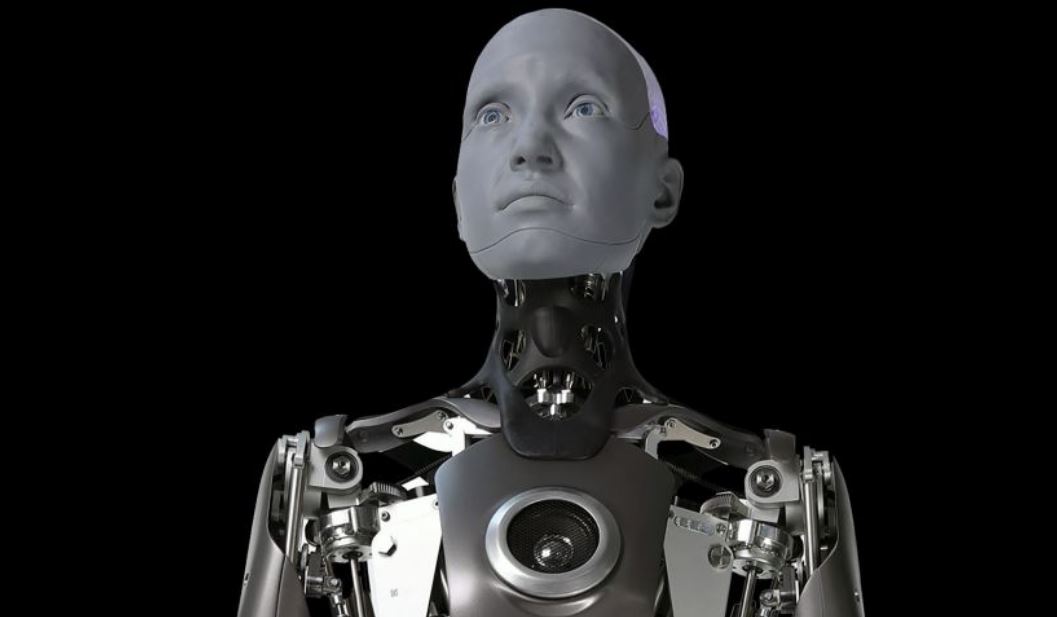
Чтобы решить насущную проблему перемещения робота из пункта А в пункт Б, робототехники разработали ряд приспособлений и приёмов: от роторов, с которыми робот может преодолевать препятствия по воздуху, до выполнения сальто назад, которому позавидовали бы мировые звёзды художественной гимнастики.
В это время Даниэле Пуччи (Daniele Pucci), руководитель лаборатории искусственного и механического интеллекта в Итальянском технологическом институте, предпринял другой дерзкий шаг: снабдил робота-гуманоида, которого он и коллеги назвали iRonCub, реактивным ранцем как у Железного человека — персонажа популярных комиксов Marvel.
Кстати, название этого робота можно перевести на русский язык как «Железный малец».
Разработчики надеются в один прекрасный день запустить своего «железного детёныша» в небо именно при помощи реактивного ранца.
Команда Пуччи считает, что такие системы однажды можно будет применять как средства быстрого реагирования при стихийных бедствиях, ежегодно уносящих жизни десятков тысяч человек во всём мире.
Прототипов таких роботов-спасателей с каждым годом становится всё больше. Конструкции их самые разнообразные: они бывают человекоподобными (гуманоидными) и четырёхногими (так называемые роботы-собаки), летающими (к примеру, коптеры) и наземными (роверы).
Как считают остроумные итальянцы, когда дело доходит до реагирования на стихийные бедствия, роботы-гуманоиды будут иметь преимущество перед другими конструкциями. Разработчики полагают, что iRonCub и ему подобным будет легче «выживать» в мире, построенном под нужды человека.
Однако, когда происходит стихийное бедствие, большая часть этой ориентированной на человека инфраструктуры может быть повреждена или полностью разрушена, что сводит на нет многие из первоначальных преимуществ робота-гуманоида.
Так вот, объединив «гуманоидный» дизайн с возможностью полёта, команда Пуччи может использовать преимущества обеих технологий.
Способные пониматься в воздух гуманоидные роботы могут ходить, летать, манипулировать объектами и перемещать их. Такие системы как нельзя лучше приспособлены к задачам реагирования на чрезвычайные ситуации, уверены Даниэле и его команда.
Такие системы как нельзя лучше приспособлены к задачам реагирования на чрезвычайные ситуации, уверены Даниэле и его команда.
Создатели этого милого "Железного мальца" надеются в скором времени опробовать его в воздухе.
Фото Instituto Italiano di Technologia.
Похожими качествами обладают и квадрокоптеры, оснащённые роботизированной рукой, однако их работе может помешать, к примеру, сильный ветер. К тому же летающими роботами необходимо научиться искусно управлять, чтобы те успешно справлялись с поставленными задачами.
Создатели iRonCub считают, что человекоподобные летающие роботы смогут стать связующим звеном между «небом и землёй» и помочь другим роботизированным машинам лучше выполнять свою работу. И не только машинам.
«Я искренне верю, что воздушная гуманоидная робототехника может использоваться как экспериментальная площадка для летающих экзоскелетов, – отметил Пуччи. – Недавняя успешная история Ричарда Браунинга показывает, что идея футуристических подвижных экзоскелетов технически осуществима.
Однако впереди нас ждёт ещё долгий путь, и в это время мы можем использовать летающих гуманоидных роботов, которые ускорят этот процесс и помогут избежать многочисленных испытаний на людях».
 Однако впереди нас ждёт ещё долгий путь, и в это время мы можем использовать летающих гуманоидных роботов, которые ускорят этот процесс и помогут избежать многочисленных испытаний на людях».
Однако впереди нас ждёт ещё долгий путь, и в это время мы можем использовать летающих гуманоидных роботов, которые ускорят этот процесс и помогут избежать многочисленных испытаний на людях».Работа итальянских инженеров описана в исследовании, опубликованном в научном журнале IEEE Robotics and Automation Letters.
К слову, ранее мы рассказывали о шестилапых, эластичных и прыгающих роботах, а также о двумерном роботе, способном «покорить» любую поверхность.
Больше новостей из мира науки и технологий вы найдёте в разделе «Наука» на медиаплатформе «Смотрим».
технологии
наука
полет
гуманоид
новости
робототехника
робот
Ранее по теме
На робопальце вырастили кожу человека, способную к заживлению
Созданы самые маленькие шагающие роботы с дистанционным управлением
Активизировались испытания лазерного оружия в Израиле и США
Роскосмос показал человекоподобного робота-аватара
Улицы Москвы начнет патрулировать робособака
Первого российского робота-собаку создали инженеры из МГУ
перевод на английский, синонимы, антонимы, примеры предложений, значение, словосочетания
Надин-это гуманоидный робот следующего поколения, который является преемником Eva, головы гуманоидного робота , произведенной компанией Hanson Robotics в 2008 году. | Nadine is a next — generation humanoid robot that is a successor from Eva, a humanoid robot head manufactured byHanson Robotics in 2008. |
Гуманоидный робот использовал мощную гидравлическую систему для перевозки людей и других тяжелых предметов на большие расстояния и по пересеченной местности, например по лестнице. | The humanoid robot used a powerful hydraulics system to carry humans and other heavy objects over long distances and rough terrain such as stairs. |
Медведь — это шестифутовый гуманоидный робот с передовыми технологиями и функциями, которые делают его эффективным и умным. | The BEAR is a six feet tall humanoid robot with advanced technology and features that make the robot effective and intelligent. |
Вакамару-это домашний гуманоидный робот , разработанный в Японии. | Wakamaru is a domestic humanoid robot developed in Japan. |
В 1939 году гуманоидный робот , известный как электро, появился на Всемирной выставке. | In 1939, the humanoid robot known as Elektro appeared at the World’s Fair. |
Гуманоидный робот Honda P2 был впервые показан в 1996 году. | Honda’s P2 humanoid robot was first shown in 1996. |
Гуманоидный робот P3 был представлен компанией Honda в 1998 году в рамках продолжающегося гуманоидного проекта компании. | The P3 humanoid robot was revealed by Honda in 1998 as a part of the company’s continuing humanoid project. |
Гуманоидный робот-это робот с формой тела, построенной так, чтобы она напоминала человеческое тело. | A humanoid robot is a robot with its body shape built to resemble the human body. |
ASIMO-единственный в мире гуманоидный робот , способный самостоятельно подниматься и спускаться по лестнице. | ASIMO is the world’s only humanoid robot able to ascend and descend stairs independently. |
Мы в самом деле верим, что это будет самый первый бегающий робот-гуманоид в Соединенных Штатах. | We truly believe this is going to be the very first running humanoid robot in the United, stay tuned. |
— Робота ? То есть металлического гуманоида , похожего на него? | “Robot? You mean the metal humanoid very like himself?” |
— Но тот гуманоид , — не отставала Сара, — тот самый, который прибыл один в сопровождении робота … | “But this other humanoid ,” Sara reminded him. “The one who came alone, accompanied by the robot . |
В 1930-х годах они создали гуманоидного робота , известного как электро, для выставочных целей, включая Всемирные ярмарки 1939 и 1940 годов. | In the 1930s, they created a humanoid robot known as Elektro for exhibition purposes, including the 1939 and 1940 World’s Fairs. |
Звуковые сенсоры позволяют гуманоидным роботам слышать речь и звуки окружающей среды, а также выполнять функции ушей человека. | Sound sensors allow humanoid robots to hear speech and environmental sounds, and perform as the ears of the human being. |
Он был использован в различных роботах , особенно продвинутых производственных роботах и Ходячих гуманоидных роботах . | It has been used in various robots , particularly advanced manufacturing robots and walking humanoid robots . |
В гуманоидных роботах он используется для распознавания объектов и определения их свойств. | In humanoid robots it is used to recognize objects and determine their properties. |
Есть также небольшие гуманоидные дистанционно управляемые роботы , а также электронные домашние животные, такие как роботизированные собаки. | There are also small humanoid remote — controlled robots as well as electronic pets, such as robotic dogs. |
Другая увлекательная идея для миссии — отправить роботов-гуманоидов на Марс до прилёта людей: сначала они построят базы, а потом будут помогать научной команде. | Another fascinating idea in the mission profile places humanoid robots on the surface of Mars before the humans themselves arrive, first to build facilities and later to serve as collaborative members of the science team. |
И цель RoboCup , реальная цель, это, к 2050-ому году мы хотим иметь полноразмерных автономных гуманоидных роботов , которые будут играть в футбол против чемпионов человеческого Чемпионата Мира и выигрывать. | And the goal of RoboCup , the actual goal is, by the year 2050 we want to have full size, autonomous humanoid robots play soccer against the human World Cup champions and win. |
Но нам удалось разобрать его и расшифровать ваш план внедрения… в наши поселения гуманоидных роботов . | Anyway… we muddled through it and decoded your plan to infiltrate our installations using humanoid robots . |
Большинство гуманоидных роботов используют ПЗС-камеры в качестве датчиков зрения. | Victim accounts were then largely ignored or dismissed in the West as communist propaganda. |
В 1986 году компания Honda начала свою программу гуманоидных исследований и разработок для создания роботов , способных успешно взаимодействовать с людьми. | In 1986, Honda began its humanoid research and development program to create robots capable of interacting successfully with humans . |
Sony также представила своих роботов Sony Dream, маленьких гуманоидных роботов , разрабатываемых для развлечения. | Sony also revealed its Sony Dream Robots , small humanoid robots in development for entertainment. |
Некоторые из этих работ послужили основой для разработки современных высокоэффективных гуманоидных роботов . | Some of this work informed the development of modern high — performance humanoid robots . |
Хотя эти характеристики желательны для гуманоидных роботов , они принесут больше сложности и новых проблем в планирование и контроль. | Although these characteristics are desirable to humanoid robots , they will bring more complexity and new problems to planning and control. |
Ранний прототип можно увидеть в коллекции гуманоидных роботов НАСА, или робонавтов . | An early prototype can be seen in NASA’s collection of humanoid robots , or robonauts . |
Вьетнам также добился значительных успехов в разработке роботов , таких как гуманоидная модель TOPIO. | Vietnam has also made significant advances in the development of robots , such as the TOPIO humanoid model. |
Гуманоидные роботы еще не обладают некоторыми особенностями человеческого тела. | This military aerial spraying killed tens of thousands of people with bubonic plague epidemics. |
Есть также небольшие гуманоидные роботы с дистанционным управлением. | There are also small humanoid remote controlled robots . |
Домашние гуманоидные роботы используются пожилыми и обездвиженными жителями, чтобы составить им компанию. | Domestic humanoid robots are used by elderly and immobilized residents to keep them company. |
Некоторые продвинутые роботы начинают использовать полностью гуманоидные руки, такие как теневая рука, Манус и рука Шунка. | Some advanced robots are beginning to use fully humanoid hands, like the Shadow Hand, MANUS, and the Schunk hand. |
Андроиды-это гуманоидные роботы , созданные так, чтобы эстетически походить на людей. | Androids are humanoid robots built to aesthetically resemble humans . |
Гуманоидные роботы в настоящее время используются в качестве исследовательских инструментов в нескольких научных областях. | Humanoid robots are now used as research tools in several scientific areas. |
Для достижения того же эффекта, что и движение человека, гуманоидные роботы используют в основном вращательные приводы. | To achieve the same effect as human motion, humanoid robots use mainly rotary actuators. |


 ..”
..”




Надя из IHMC — универсальный гуманоидный товарищ по команде
Как понял Верн, Гражданская война в США (во время которой
было выполнено 60 000 ампутаций) положило начало современной эре протезирования в Соединенных Штатах благодаря федеральному финансированию и волне патентов на дизайн, поданных протезистами-предпринимателями. Две мировые войны укрепили коммерческую индустрию протезирования как в Соединенных Штатах, так и в Западной Европе, а продолжающаяся война с терроризмом помогла ей превратиться в индустрию с оборотом в 6 миллиардов долларов США по всему миру. Однако эти недавние инвестиции не являются результатом непропорционально большого количества ампутаций в ходе военных конфликтов: около 1500 американских солдат и 300 британских солдат лишились конечностей в Ираке и Афганистане. Потеря конечностей среди населения в целом затмевает эти цифры. Только в Соединенных Штатах более 2 миллионов человек живут с потерей конечностей, при этом 185 000 человек ежегодно подвергаются ампутации. Гораздо меньшее число детей — от 1500 до 4500 детей в год — рождаются с разницей или отсутствием конечностей, включая меня.
Гораздо меньшее число детей — от 1500 до 4500 детей в год — рождаются с разницей или отсутствием конечностей, включая меня.
Сегодня люди, разрабатывающие протезы, как правило, инженеры с добрыми намерениями, а не сами инвалиды. Мясистые обрубки мира служат хранилищем мечтаний этих дизайнеров о высокотехнологичном, сверхчеловеческом будущем. Я знаю это, потому что на протяжении всей своей жизни я был оснащен одними из самых
самые передовые протезы на рынке. После того как я родился без левого предплечья, я был одним из первых младенцев в Соединенных Штатах, которым снабдили миоэлектрическим протезом руки — электронным устройством, управляемым мышцами носителя, напрягающимися от датчиков внутри гнезда протеза. С тех пор я носил множество протезов рук, каждый из которых стремился к идеальному воспроизведению человеческой руки — иногда за счет эстетики, иногда за счет функциональности, но всегда предназначенный для имитации и замены того, что отсутствовало.
За время моей жизни миоэлектрические руки превратились из когтеобразных конструкций в мультизахватные, программируемые, анатомически точные копии человеческой руки, большинство из которых стоит десятки тысяч долларов. Журналисты не могут налюбоваться этими изощренными, многоцелевыми «бионическими» руками с реалистичной силиконовой кожей и органическими движениями, негласно обещая, что инвалидность скоро исчезнет, а любая потерянная конечность или орган будет заменена равноценной копией. Инновации в области протезов рук рассматриваются как соревнование с высокими ставками, чтобы увидеть, что технологически возможно. Тайлер Хейс, генеральный директор стартапа по производству протезов
Журналисты не могут налюбоваться этими изощренными, многоцелевыми «бионическими» руками с реалистичной силиконовой кожей и органическими движениями, негласно обещая, что инвалидность скоро исчезнет, а любая потерянная конечность или орган будет заменена равноценной копией. Инновации в области протезов рук рассматриваются как соревнование с высокими ставками, чтобы увидеть, что технологически возможно. Тайлер Хейс, генеральный директор стартапа по производству протезов
Atom Limbs изложила это в видео WeFunder, которое помогло собрать 7,2 миллиона долларов от инвесторов: «Каждый лунный полет в истории начинался с изрядной доли сумасшествия, от электричества до космических путешествий, и Atom Limbs ничем не отличается».
Мы вовлечены в гонку бионических рук. Но делаем ли мы реальный прогресс? Пришло время спросить, для кого на самом деле нужны протезы и чего они, как мы надеемся, на самом деле сделают. Каждая новая бионическая рука с несколькими захватами имеет тенденцию быть более сложной, но и более дорогой, чем предыдущая, и с меньшей вероятностью покрывается (даже частично) страховкой. И, как показывают недавние исследования, гораздо более простые и гораздо менее дорогие протезы могут одинаково хорошо выполнять многие задачи, а причудливые бионические руки, несмотря на все их электронные возможности, редко используются для хватания.
И, как показывают недавние исследования, гораздо более простые и гораздо менее дорогие протезы могут одинаково хорошо выполнять многие задачи, а причудливые бионические руки, несмотря на все их электронные возможности, редко используются для хватания.
Активные руки, такие как этот, изготовленный протезной фирмой Arm Dynamics, дешевле и долговечнее, чем бионические протезы. Насадка от компании Texas Assistive Devices, производящей протезы, рассчитана на очень большой вес, что позволяет автору выполнять упражнения, которые были бы рискованными или невозможными с ее гораздо более дорогой бибионической рукой. Габриэла Хасбун; Макияж: Мария Нгуен для косметики MAC; Волосы: Джоан Лаки для Living Proof
Function or Form
В последние десятилетия подавляющее внимание исследований и разработок новых искусственных рук было сосредоточено на совершенствовании различных типов захватов.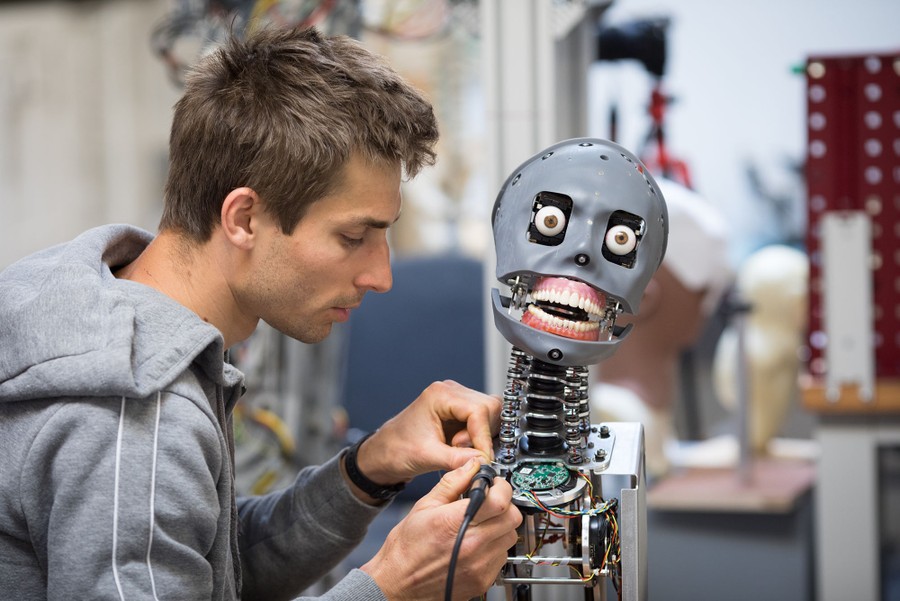 Многие из самых дорогих рук на рынке отличаются количеством и разнообразием выбираемых цепких захватов. Мой собственный любимец средств массовой информации, bebionic от Ottobock, который я получил в 2018 году, имеет силовой захват в форме кулака, щипковые захваты и один очень специфический режим с большим пальцем поверх указательного для вежливой передачи кредитной карты. Моя миоэлектрическая рука 21-го века казалась замечательной, пока я не попытался использовать ее для некоторых рутинных задач, где она оказалась
Многие из самых дорогих рук на рынке отличаются количеством и разнообразием выбираемых цепких захватов. Мой собственный любимец средств массовой информации, bebionic от Ottobock, который я получил в 2018 году, имеет силовой захват в форме кулака, щипковые захваты и один очень специфический режим с большим пальцем поверх указательного для вежливой передачи кредитной карты. Моя миоэлектрическая рука 21-го века казалась замечательной, пока я не попытался использовать ее для некоторых рутинных задач, где она оказалась
еще громоздко и занимает много времени, чем если бы я просто оставил его на диване. Я не мог использовать его, чтобы закрыть дверь, например, задача, которую я могу сделать с моей культей. А без чрезвычайно дорогого дополнения в виде запястья с электроприводом я не мог пересыпать овсянку из кастрюли в миску. Выполнение задач крутым бионическим способом, даже если он имитировал наличие двух рук, явно не лучше, чем выполнение вещей по-моему, иногда с помощью моих ног и ступней.
Когда я впервые заговорил с
Эд Спирс, лектор по робототехнике и машинному обучению в Имперском колледже Лондона, был в своем кабинете поздно ночью, но его все еще волновали роботизированные руки — нынешнее направление его исследований. Спайерс говорит, что антропоморфная роботизированная рука неизбежна, от реальности сегодняшнего протезирования до фантазии научной фантастики и аниме. «На одной из своих первых лекций здесь я показывал отрывки из фильмов и мультфильмов и то, как крутые кинематографисты делают руки роботов», — говорит Спирс. «В аниме Gundam , есть так много крупных планов гигантских рук роботов, хватающих такие вещи, как массивные пушки. Но почему это должна быть человеческая рука? Почему у робота просто нет пистолета вместо руки?»
Пришло время спросить, для кого на самом деле нужны протезы и чего они, как мы надеемся, на самом деле сделают.
Спирс считает, что разработчики протезов слишком увлечены формой, а не функцией. Но он поговорил с ними достаточно, чтобы понять, что они не разделяют его точку зрения: «У меня такое ощущение, что людям нравится идея о том, что люди великие, и что руки — это то, что делает людей совершенно уникальными». Почти каждый университетский факультет робототехники, который посещает Спирс, занимается разработкой антропоморфных роботов. «Вот как выглядит будущее», — говорит он, и его голос звучит немного раздраженно. «Но часто есть лучшие способы».
Почти каждый университетский факультет робототехники, который посещает Спирс, занимается разработкой антропоморфных роботов. «Вот как выглядит будущее», — говорит он, и его голос звучит немного раздраженно. «Но часто есть лучшие способы».
Подавляющее большинство людей, пользующихся протезами конечностей, — это люди с односторонней ампутацией — люди с ампутациями, затрагивающими только одну сторону тела, — и они практически всегда используют свою доминирующую «мясистую» руку для деликатных задач, таких как поднятие чашки. Как односторонние, так и двусторонние ампутированные конечности также получают помощь от своего туловища, ступней и других объектов в их окружении; редко задачи выполняются одним протезом. И все же, общие клинические оценки для определения успеха протеза основаны на использовании только протеза без помощи других частей тела. Такие оценки, по-видимому, предназначены для демонстрации возможностей протеза руки, а не для определения того, насколько он полезен в повседневной жизни пользователя. Инвалиды по-прежнему не являются арбитрами стандартов протезирования; мы все еще не в центре дизайна.
Инвалиды по-прежнему не являются арбитрами стандартов протезирования; мы все еще не в центре дизайна.
Крюк Хосмера [слева], первоначально разработанный в 1920 году, представляет собой оконечное устройство с питанием от тела, которое используется до сих пор. Насадка-молоток [справа] может быть более эффективной, чем насадка-захват, при забивании гвоздей в дерево. Слева: Джон Прието/The Denver Post/Getty Images; Справа: Hulton-Deutsch Collection/Corbis/Getty Images
Протезы в реальном мире
Чтобы узнать, как пользователи протезов живут со своими устройствами,
Спирс руководил исследованием, в котором использовались камеры, надетые на головы участников, для записи ежедневных действий восьми человек с односторонней ампутацией или врожденными различиями конечностей. Исследование, опубликованное в прошлом году в IEEE Transactions on Medical Robotics and Bionics , включал несколько разновидностей миоэлектрических рук, а также систем с питанием от тела, которые используют движения плеча, груди и плеча, передаваемые по кабелю, для механического управления захватом в конце протез. Исследование проводилось, когда Спирс был научным сотрудником лаборатории GRAB Йельского университета, возглавляемой Аароном Долларом. Помимо Доллара, он тесно сотрудничал с аспиранткой Джиллиан Кокран, которая была соавтором исследования.
Исследование проводилось, когда Спирс был научным сотрудником лаборатории GRAB Йельского университета, возглавляемой Аароном Долларом. Помимо Доллара, он тесно сотрудничал с аспиранткой Джиллиан Кокран, которая была соавтором исследования.
Просматривая необработанные кадры из исследования, я чувствовал грусть и чувство товарищества с анонимными пользователями протезов. На роликах видны неуклюжесть, просчеты и случайные падения, знакомые даже очень опытным пользователям протезов рук. Часто протез просто помогает прижать объект к телу, которым будет управлять другая рука. Также было очевидно, сколько времени люди тратили на подготовку своих миоэлектрических протезов для выполнения задачи — часто требовалось несколько дополнительных секунд, чтобы вручную или с помощью электроники повернуть запястья своих устройств, выровнять объект, чтобы правильно схватить его, и отработать захват. подход. Участник, который повесил бутылку с дезинфицирующим спреем на «крючок» руки, протирая кухонный стол, казалось, был тем, кто все понял.
В ходе исследования протезы использовались в среднем только для 19 процентов всех зафиксированных манипуляций. В целом протезы использовались в основном для нехватательных действий, а другая, «неповрежденная» рука выполняла большую часть хватания. Исследование выявило большие различия в использовании между теми, у кого неэлектрические протезы с питанием от тела, и теми, у кого есть миоэлектрические протезы. Для пользователей протезов с приводом от тела, у которых ампутация была ниже локтя, почти 80 процентов использования протезов приходилось на движения без захвата — толкание, нажатие, вытягивание, подвешивание и стабилизация. Для миоэлектрических пользователей устройство использовалось для захвата только в 40 процентах случаев.
Что еще более показательно, пользователи с неэлектрическими захватами или разъемными крюками тратили значительно меньше времени на выполнение задач, чем пользователи с более сложными протезами. Спайерс и его команда отметили плавность и скорость, с которой первые приступили к выполнению задач в своих домах. Они могли использовать свои искусственные руки почти мгновенно и даже получать прямую тактильную обратную связь через кабель, который управляет такими системами. Исследование также выявило небольшую разницу в использовании между миоэлектрическими устройствами с одним захватом и более причудливыми миоэлектрическими многошарнирными руками с несколькими захватами, за исключением того, что пользователи, как правило, избегали подвешивания предметов на своих руках с несколькими захватами, по-видимому, из страха сломать их.
Они могли использовать свои искусственные руки почти мгновенно и даже получать прямую тактильную обратную связь через кабель, который управляет такими системами. Исследование также выявило небольшую разницу в использовании между миоэлектрическими устройствами с одним захватом и более причудливыми миоэлектрическими многошарнирными руками с несколькими захватами, за исключением того, что пользователи, как правило, избегали подвешивания предметов на своих руках с несколькими захватами, по-видимому, из страха сломать их.
«У нас сложилось впечатление, что люди с миоэлектрическими руками с несколькими хватами довольно осторожно подходят к их использованию», — говорит Спирс. Это неудивительно, поскольку большинство миоэлектрических рук стоят более 20 000 долларов, редко получают одобрение страховки, требуют частой профессиональной поддержки для изменения схемы хвата и других настроек, а также требуют дорогостоящих и длительных процессов ремонта. По мере того, как протезные технологии становятся все более сложными и запатентованными, все большую озабоченность вызывает долгосрочная работоспособность. В идеале устройство должно легко ремонтироваться пользователем. И все же некоторые стартапы в области протезирования предлагают модель подписки, при которой пользователи продолжают платить за доступ к ремонту и поддержке.
В идеале устройство должно легко ремонтироваться пользователем. И все же некоторые стартапы в области протезирования предлагают модель подписки, при которой пользователи продолжают платить за доступ к ремонту и поддержке.
Несмотря на выводы своего исследования, Спирс говорит, что подавляющее большинство исследований и разработок в области протезирования по-прежнему сосредоточено на совершенствовании способов захвата дорогих высокотехнологичных бионических рук. По его словам, даже помимо протезирования исследования манипуляций в исследованиях приматов и робототехники в подавляющем большинстве связаны с хватанием: «Все, что не хватает, просто выбрасывается».
TRS производит широкий ассортимент протезов с приводом от тела для различных хобби и занятий спортом. Каждое приспособление предназначено для определенной задачи, и их можно легко заменить для различных видов деятельности. Fillauer TRS
Хватаясь за историю
Если мы решили, что то, что делает нас людьми, — это наши руки, а то, что делает руку уникальной, — это ее способность хватать, то единственный протез, который у нас есть, — это тот, который прикреплен к запястьям большинства людей. Тем не менее, погоня за максимальной пятизначной хваткой не обязательно является следующим логическим шагом. Фактически, история показывает, что люди не всегда были зациклены на идеальном воссоздании человеческой руки.
Тем не менее, погоня за максимальной пятизначной хваткой не обязательно является следующим логическим шагом. Фактически, история показывает, что люди не всегда были зациклены на идеальном воссоздании человеческой руки.
Как рассказывается в сборнике эссе 2001 г.
Письмо на руках: память и знания в Европе раннего Нового времени , представления о руке развивались на протяжении столетий. «Душа подобна руке; ибо рука есть орудие инструментов», — писал Аристотель в De Anima . Он полагал, что человечество намеренно наделено подвижной и цепкой рукой, потому что только наш уникальный разумный мозг может использовать ее — не как простую утварь, а как инструмент для apprehensio , или «схватывания» мира в прямом и переносном смысле.
Спустя более 1000 лет идеи Аристотеля нашли отклик у художников и мыслителей эпохи Возрождения. Для Леонардо да Винчи рука была посредником между мозгом и миром, и он приложил исключительные усилия в своих анализах и иллюстрациях человеческой руки, чтобы понять ее основные компоненты.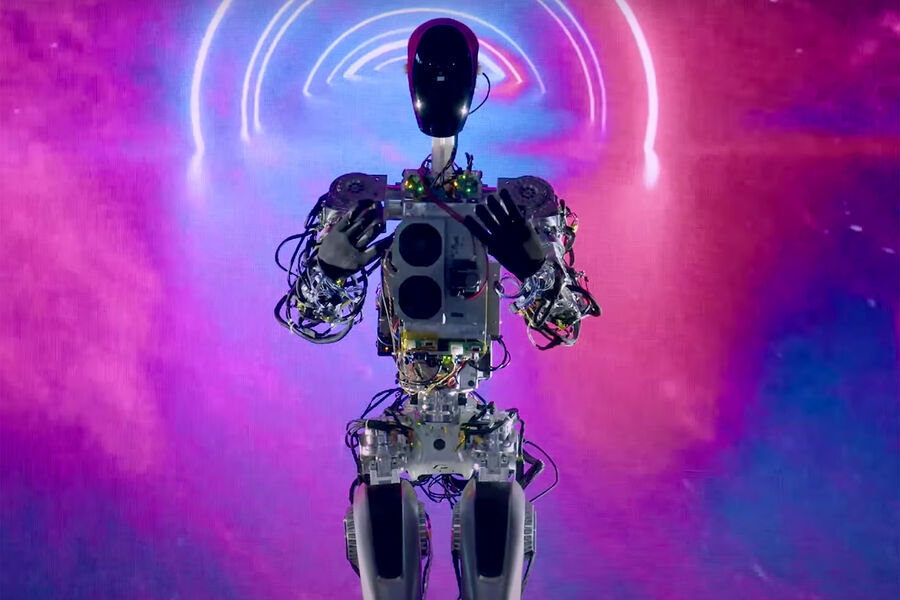 Его тщательные исследования сухожилий и мышц предплечья и кисти привели его к выводу, что «хотя человеческая изобретательность делает различные изобретения… она никогда не найдет изобретений более красивых, более подходящих или более прямых, чем природа, потому что в ее изобретениях нет ничего недостающего и ничего лишнего».
Его тщательные исследования сухожилий и мышц предплечья и кисти привели его к выводу, что «хотя человеческая изобретательность делает различные изобретения… она никогда не найдет изобретений более красивых, более подходящих или более прямых, чем природа, потому что в ее изобретениях нет ничего недостающего и ничего лишнего».
Иллюстрации да Винчи вызвали волну интереса к анатомии человека. Тем не менее, при всем тщательном изображении человеческой руки европейскими мастерами, рука рассматривалась скорее как источник вдохновения, чем как объект, который простые смертные могли воспроизвести. На самом деле было широко признано, что хитросплетения человеческой руки свидетельствуют о божественном замысле. Никакая машина, заявил христианский философ Уильям Пейли, не является «более искусственной или более очевидной», чем сгибатели руки, что предполагает преднамеренный замысел Бога.
Выполнение задач крутым бионическим способом, даже если это имитировало две руки, было явно не лучше, чем выполнение вещей по-моему, иногда с помощью моих ног и ступней.
К середине 1700-х годов, когда на глобальном севере произошла промышленная революция, начал формироваться более механистический взгляд на мир, и грань между живыми существами и машинами начала стираться. В своей статье 2003 года «
Wetware восемнадцатого века, — пишет Джессика Рискин, профессор истории Стэнфордского университета, — период между 1730-ми и 1790s был симуляцией, в которой механики искренне пытались сократить разрыв между живыми и искусственными механизмами». В этот период произошли значительные изменения в конструкции протезов конечностей. В то время как механические протезы 16-го века были отягощены железом и пружинами, в протезе 1732 года с приводом от тела использовалась система шкивов для сгибания руки, сделанной из легкой меди. К концу 18 века металл заменили кожей, пергаментом и пробкой — более мягкими материалами, имитирующими живую материю.
Технооптимизм начала 20-го века привел к очередным изменениям в дизайне протезов.
Вольф Швейцер, патологоанатом Цюрихского института судебной медицины, человек с ампутированными конечностями. Он владеет широким спектром современных протезов рук и имеет необходимый опыт для их тестирования. Он отмечает, что анатомически правильные протезы рук вырезались и выковывались на протяжении большей части 2000 лет. И все же, по его словам, разрезной крючок 20-го века с приводом от тела «более современен», его конструкция больше стремится сломать форму человеческой руки.
Он владеет широким спектром современных протезов рук и имеет необходимый опыт для их тестирования. Он отмечает, что анатомически правильные протезы рук вырезались и выковывались на протяжении большей части 2000 лет. И все же, по его словам, разрезной крючок 20-го века с приводом от тела «более современен», его конструкция больше стремится сломать форму человеческой руки.
«Рука, приводимая в действие телом, — с точки зрения ее символизма — (по-прежнему) выражает человеко-машинный символизм индустриального общества 1920-х годов».
пишет Швейцер в своем блоге о протезах рук, «когда человек должен был функционировать как заводная шестерня на производственных линиях или в сельском хозяйстве». В оригинальном дизайне крючка Хосмера 1920-х годов петля внутри крючка была помещена только для завязывания обуви, а другая — только для удержания сигарет. Эти дизайны, как сказал мне Ad Spiers, были «невероятно функциональными, функциональность превыше формы. Все части служили определенной цели».
Швейцер считает, что по мере того, как в 20-м веке потребность в ручном труде уменьшалась, протезы, которые были высокофункциональными, но не натуралистичными, затмились новым высокотехнологичным видением будущего: «бионическими» руками. В 2006 году Агентство перспективных оборонных исследовательских проектов США запустило
Революционное протезирование, исследовательская инициатива по разработке следующего поколения протезов рук с «почти естественным» контролем. В рамках программы стоимостью 100 миллионов долларов были созданы два многошарнирных протеза руки (один для исследований, а другой стоимостью более 50 000 долларов). Что еще более важно, это повлияло на создание других подобных протезов, сделав бионическую руку — как ее представляли себе военные — святым Граалем в протезировании. Сегодня бионическая рука с несколькими захватами является гегемоном, символом целостности киборга.
И все же некоторые разработчики протезов придерживаются другого видения. TRS, базирующаяся в Боулдере, штат Колорадо, является одним из немногих производителей
протезы для конкретных видов деятельности, которые часто более долговечны и более доступны с финансовой точки зрения, чем роботизированные протезы.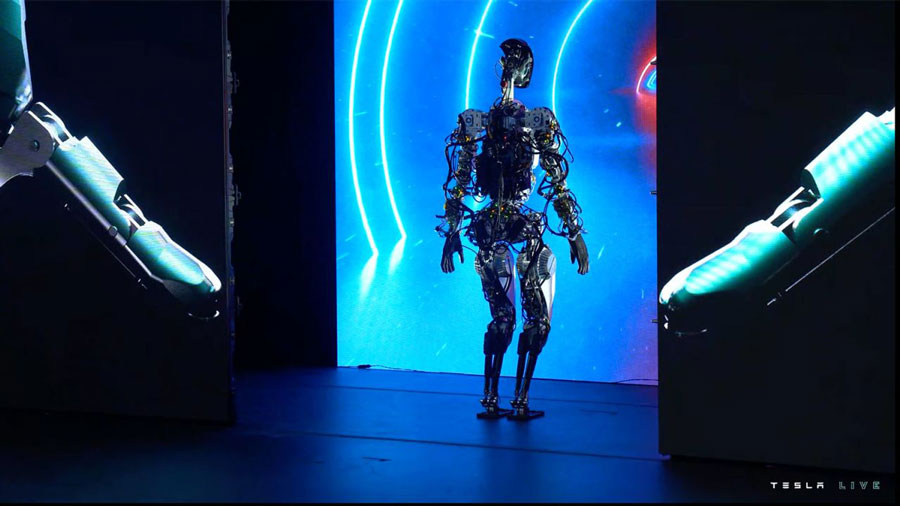 Эти пластмассовые и силиконовые насадки, в том числе мягкое устройство в форме гриба для отжиманий, храповой зажим для подъема тяжестей и вогнутый плавник для плавания, помогли мне ощутить наибольшую функциональность, которую я когда-либо получал от протеза руки. .
Эти пластмассовые и силиконовые насадки, в том числе мягкое устройство в форме гриба для отжиманий, храповой зажим для подъема тяжестей и вогнутый плавник для плавания, помогли мне ощутить наибольшую функциональность, которую я когда-либо получал от протеза руки. .
Такие низкотехнологичные протезы для активности и протезы с питанием от тела работают на удивление хорошо, а стоимость бионических рук составляет ничтожную долю. Они не выглядят и не действуют как человеческие руки, и от этого они функционируют лучше. Согласно Швейцеру, протезы с приводом от тела
инженеры регулярно называют его «мистическим» или насмешливо называют «капитаном Крюком». Будущие бионические плечи и локти могут иметь огромное значение в жизни людей, у которых отсутствует конечность до плеча, если предположить, что эти устройства можно будет сделать надежными и доступными. Но для Швейцера и большого процента пользователей, неудовлетворенных своими миоэлектрическими протезами, индустрия протезов еще не предложила ничего принципиально лучшего или более дешевого, чем протезы с питанием от тела.
Прорывы, которых мы хотим
Бионические руки стремятся сделать людей с ограниченными возможностями «цельными», чтобы мы участвовали в мире, который в культурном отношении двурукий. Но гораздо важнее, чтобы мы жили так, как хотим, с доступом к необходимым нам инструментам, чем чтобы мы выглядели как все. В то время как многие люди с разными конечностями использовали бионические руки для взаимодействия с миром и самовыражения, многовековые усилия по совершенствованию бионической руки редко сосредотачиваются на нашем жизненном опыте и том, что мы хотим делать в своей жизни.
Нам обещали прорыв в технологии протезирования на протяжении большей части 100 лет. Мне вспоминается научный ажиотаж вокруг выращенного в лаборатории мяса, который кажется одновременно взрывным сдвигом и признаком интеллектуальной капитуляции, когда политические и культурные изменения игнорируются в пользу технологического исправления. С персонажами в мире протезирования — врачами, страховыми компаниями, инженерами, протезистами и военными — играющими одни и те же роли на протяжении десятилетий, почти невозможно создать что-то действительно революционное.
Между тем, эта метафорическая гонка на Луну — это миссия, которая забыла о своей первоначальной цели: помочь людям с ограниченными возможностями приобретать и использовать инструменты, которые они хотят. Есть недорогие, доступные, низкотехнологичные протезы, которые доступны прямо сейчас и требуют инвестиций в инновации для дальнейшего снижения затрат и улучшения функциональности. И, по крайней мере, в Соединенных Штатах существует сломанная система страхования, которую необходимо починить. Освобождение себя от гонки бионических ручных вооружений может открыть возможности более функциональных конструкций, которые будут более полезными и доступными, и могут помочь нам вернуть наши устремления в области протезирования на землю.
Эта статья опубликована в печатном выпуске за октябрь 2022 г.
Илон Маск представляет прототип робота-гуманоида на День искусственного интеллекта
- Следите за этой частной спутниковой компанией
- Не могу понять, что было сказано? Этот ИИ решает эту проблему…
- Зарождающаяся «космическая экономика» уже здесь
Уважаемый читатель,
Умело разработанный для привлечения инженеров искусственного интеллекта (ИИ), День искусственного интеллекта Tesla стал одним из самых важных событий года для высоких технологий. Для тех, кому интересно, он длится около трех часов и 20 минут, и его можно найти на YouTube.
Для тех, кому интересно, он длится около трех часов и 20 минут, и его можно найти на YouTube.
Мероприятие состоялось в прошлую пятницу, и хотя целью Tesla был набор сотрудников, инвесторы и технологи, интересующиеся областью ИИ, могут почерпнуть замечательную информацию.
Неудивительно, что прогресс, достигнутый Теслой за последний год, не что иное, как выдающийся. Меня поражает, что так много критиков этого события.
В прошлом году генеральный директор Илон Маск ловко продемонстрировал макет того, что должно было стать Оптимусом — двуногого робота Tesla, предназначенного для поддержки людей. Забавно, но Оптимус на самом деле был человеком, одетым как робот, танцующий на сцене.
В то время многие смеялись над Маском… но сейчас им не до смеха.
Прототип Оптимуса реален. Существует не только четкий путь к коммерциализации, но и путь, при котором цена составляет менее 20 000 долларов. По этой цене Optimus будет доступен как крупным, так и малым предприятиям и даже обычным потребителям.
Заявления Tesla о высокопроизводительных вычислениях и технологиях автономного вождения были не менее впечатляющими.
Более 160 000 клиентов теперь используют программное обеспечение Tesla для полного самостоятельного вождения (FSD). Это еще не идеально, но ни одна другая компания не приблизилась к этому. Несмотря на это, автомобильная промышленность и многие технические журналисты любят делать вид, что FSD на самом деле не существует.
Технология, на которой построено здание Теслы, является революционной. Это разрушит и изменит весь транспортный сектор. Но прорыв не имеет ничего общего с электромобилем (EV), а связан с тем, что это вид транспорта с искусственным интеллектом.
Амбиции Tesla в области робототехники ничем не отличаются. Роботизированное оборудование — это всего лишь среда. Революция произойдет из-за программного обеспечения ИИ.
Двуногие роботы с человеческими руками для манипулирования объектами будут повсюду через несколько лет. Они увеличат человеческий труд, повысят производительность, приведут к меньшему количеству травм на рабочем месте, позаботятся о стареющем населении, обеспечат безопасность и даже помогут нам по дому.
Они увеличат человеческий труд, повысят производительность, приведут к меньшему количеству травм на рабочем месте, позаботятся о стареющем населении, обеспечат безопасность и даже помогут нам по дому.
Оптимус сделает для человеческого труда то же, что iPhone сделал для многих аспектов нашей жизни. Программируемые, обновляемые и способные выполнять работу множества различных устройств, которые просто превращаются в программные приложения, способные использовать аппаратное обеспечение iPhone.
Оптимус проделает то же самое с физическим миром — с той лишь разницей, что мы сможем научить его нужным задачам. И он будет учиться, запоминать и оптимизировать все, что нам нужно для выполнения.
Вместе с этим появится индустрия стоимостью в сотни миллиардов долларов ежегодно. Новые рабочие места уже создаются. Есть длинный список хорошо финансируемых участников, которые думали, что они впереди… и теперь они все нервничают после пятничного мероприятия.
Значение происходящего не просто в какой-то новой крутой технологии. То, что Тесла делает с Оптимусом, изменит общество. Это повысит продуктивность и качество жизни.
То, что Тесла делает с Оптимусом, изменит общество. Это повысит продуктивность и качество жизни.
И в процессе Тесла станет многотриллионной компанией.
Много лет назад, когда я впервые рекомендовал Tesla, я привел убедительный аргумент, что Tesla на самом деле не автомобильная компания, а одна из самых успешных компаний в области ИИ на планете. Я никогда не получал столько критических отзывов от своих подписчиков о чем-либо, что я когда-либо писал до моего исследования Tesla.
Даже с учетом последнего отката на рынке акции Tesla по-прежнему выросли более чем на 1000% с момента этой рекомендации. И многое еще впереди. Надеюсь, теперь все это видят.
В завтрашнем выпуске The Bleeding Edge мы углубимся в День искусственного интеллекта Tesla. Это слишком важно, чтобы не посмотреть поближе. Это означает, что завтра наши три темы будут посвящены трем самым интересным разработкам Tesla в области искусственного интеллекта.
Уверен, вам будет интересно, так что будьте начеку.
Началась гонка за аварийным спутниковым подключением…
Какая разница за несколько недель.
В прошлом месяце мы говорили о большом партнерстве между T-Mobile и подразделением SpaceX Starlink. Они обеспечат спутниковую связь для смартфонов, используемых в беспроводной сети T-Mobile.
Конечно, эта услуга работает только для текстовых сообщений. Спутниковое подключение к смартфону по стандартным беспроводным частотам не может обеспечить пропускную способность, необходимую для видеоприложений. Но это отлично подходит для потребителей, которые часто находятся в сельской или отдаленной местности без покрытия.
И самое приятное: эта новая услуга будет работать на смартфонах, так как никаких модификаций не требуется.
Кажется, это вдруг стала горячей темой.
Объявление T-Mobile / Starlink было выпущено намеренно, чтобы опередить Apple. Во время анонса основного продукта Apple для своих смартфонов в прошлом месяце технический гигант объявил об аналогичной услуге для своих iPhone. А Apple заключила партнерское соглашение с действующей компанией Globalstar для спутниковой связи.
А Apple заключила партнерское соглашение с действующей компанией Globalstar для спутниковой связи.
Но история становится еще лучше…
Стартап, который мы хорошо знаем по адресу The Bleeding Edge вполне может быть впереди всех остальных.
Lynk Global только что получила одобрение Федеральной комиссии по связи (FCC) на свою версию той же службы. Lynk будет первым, кто запустит коммерческую службу обмена сообщениями со спутника на телефон.
Обычные читатели могут помнить Lynk. Мы говорили об этой спутниковой технологической компании следующего поколения в прошлом году.
Lynk поддерживает собственную спутниковую группировку. И его технология может обеспечить прямую связь со смартфонами через спутники на орбите. Это сложная проблема для подключения к чему-то вроде смартфона, а не к большой стационарной спутниковой антенне.
И самое примечательное здесь то, что Lynk удалось получить одобрение FCsC. FCC имеет жесткие стандарты, которые необходимо соблюдать. Возможно, это самый строгий регулятор коммуникаций в мире.
Возможно, это самый строгий регулятор коммуникаций в мире.
Lynk уже имеет 15 контрактов, которые охватывают 36 стран, на обеспечение спутниковой связи для смартфонов. Утверждение FCC ускорит получение разрешения регулирующих органов на других рынках, а это означает, что Lynk теперь находится в авангарде глобального развертывания для этого вида коммуникационных услуг.
Излишне говорить, что это компания на ранней стадии развития, за которой мы хотим очень внимательно следить.
Я очень рад видеть, как проходит запуск Lynk. Я подозреваю, что в следующем году мы увидим многочисленные развертывания.
Эта технология принесет огромную пользу и обществу. Это даст каждому владельцу смартфона эквивалент дорогого спутникового телефона, который станет отличным ресурсом для экстренных служб вне зоны действия беспроводных сетей.
ИИ, который делает изучение иностранных языков ненужным…
OpenAI снова сделал это.
Читатели, возможно, лучше всего помнят OpenAI благодаря ее передовому искусственному интеллекту (ИИ), известному как GPT-3. Мы совсем недавно говорили о GPT-3 в The Bleeding Edge .
Мы совсем недавно говорили о GPT-3 в The Bleeding Edge .
Та же команда только что выпустила совершенно новый ИИ под названием Whisper. И это столь же впечатляюще.
Whisper построен на основе нейронной сети. Это та же базовая технология искусственного интеллекта, которая лежит в основе нашей торговой системы Perceptron . И он может распознавать и переводить речь так, как раньше не удавалось ни одному ИИ.
Whisper обучался на 680 000 часов аудио из Интернета. И OpenAI намеренно обучал его, используя речь, которую трудно понять.
Часы аудио включали речь с разными диалектами и акцентами. Другие клипы в тренировочных данных имели сильный фоновый шум. Были также клипы «скоростного разговора». Они очень похожи на аукционистов, говорящих как можно быстрее. OpenAI намеренно выбрал сложный для понимания звук, чтобы увеличить диапазон и возможности ИИ.
В результате Шепот гораздо лучше понимает акценты и языки, чем любой другой ИИ на планете.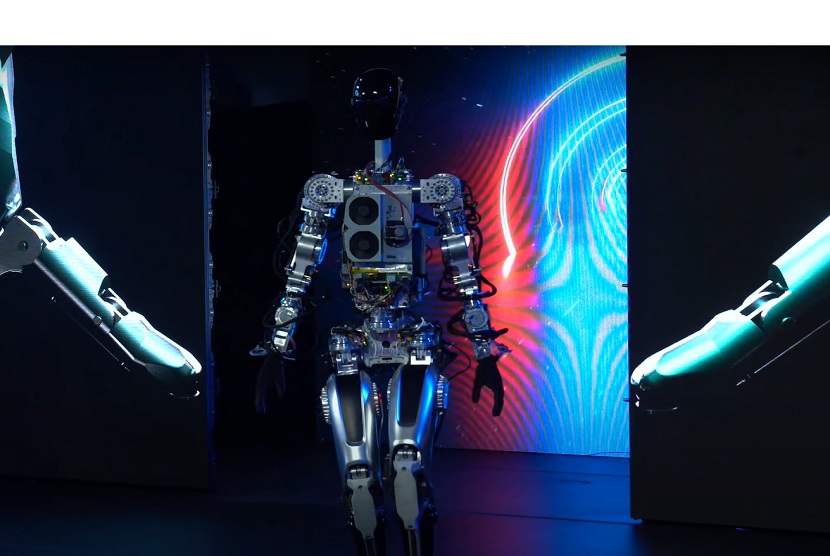
И поймите: OpenAI уже открыл исходный код этой технологии. Это означает, что любой, кто хочет использовать Whisper, может встроить ИИ в свои собственные программные приложения.
А если они сделают еще один шаг вперед и соединит Whisper с технологией обработки естественного языка (NLP), любой человек может стать разговорным ИИ, способным понимать людей и взаимодействовать с ними.
Для меня это недостающая часть технологии распознавания речи.
Представьте себе, что Whisper встроен в наш смартфон или, возможно, в очки дополненной реальности (AR).
ИИ может автоматически расшифровывать разговоры, происходящие вокруг нас, и отображать их в виде текста либо на нашем телефоне, либо в линзах наших очков дополненной реальности. Или Whisper может незаметно переводить для нас речь через динамик в ушных вкладышах или в дужке очков.
Конечным продуктом станет ИИ-помощник, который сможет автоматически переводить иностранные языки и трудные для понимания акценты для потребителей — и все это в режиме реального времени. Все языковые барьеры в мире мгновенно исчезнут.
Все языковые барьеры в мире мгновенно исчезнут.
Выпуск Whisper в дикую природу благодаря открытому исходному коду этой технологии ускорит внедрение. Это позволяет компаниям использовать технологию искусственного интеллекта и превращать ее в высокофункциональные и полезные потребительские и бизнес-продукты в ускоренном темпе.
Демократизация доступа в космос…
Сегодня мы завершим очередным захватывающим событием в области коммерциализации космоса.
Я подозреваю, что постоянные читатели уже знакомы с Axiom Space. Это частная космическая компания, которая собирается запустить первую в мире частную космическую станцию. Первые модули Axiom будут запущены в течение следующих 14 месяцев или около того.
Компания Axiom только что объявила, что подписала соглашение с правительством Саудовской Аравии на запуск двух саудовских астронавтов в рамках частной космической миссии. Эта миссия повысится в следующем году.
Это следует за аналогичной сделкой, которую Axiom недавно подписала с Турцией.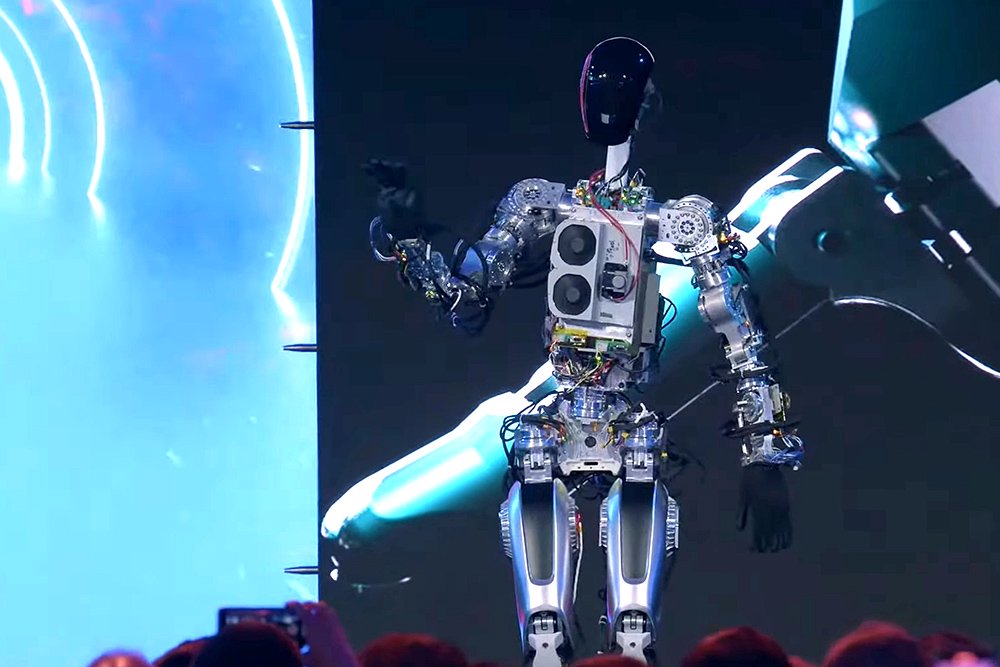 И Axiom Space также ведет переговоры с рядом других правительств.
И Axiom Space также ведет переговоры с рядом других правительств.
Когда мы думаем о Саудовской Аравии и Турции, это две страны, у которых никогда не было выдающихся космических программ.
На самом деле, доступ человека к орбите Земли исторически контролировался США и Россией, а более современным пришел Китай. Если кто-то и хотел полететь на орбиту, то это должна была быть одна из этих трех стран.
Но эти дни прошли.
Частные компании, такие как Axiom Space, эффективно демократизируют доступ к космосу. В ближайшие годы они откроют двери как для коммерческих, так и для общественных космических путешествий.
Основной причиной этого является стоимость.
Если мы помним, Axiom планирует использовать ракеты SpaceX для запуска своих миссий. А система SpaceX для повторного использования своих тяжелых ракет-носителей снизила стоимость запуска более чем на 90%.
Это означает, что коммерческие запуски внезапно стали доступными для тех стран, которые никогда раньше не имели доступа к космосу. Теперь страны могут разрабатывать космические программы, не тратя десятки миллиардов долларов на инвестиции в системы запуска и орбитальные среды обитания.
Теперь страны могут разрабатывать космические программы, не тратя десятки миллиардов долларов на инвестиции в системы запуска и орбитальные среды обитания.
Доступ — это только начало.
На самом деле мы наблюдаем здесь зарождение зарождающейся космической экономики. Большинство компаний, работающих в этой развивающейся отрасли, по-прежнему являются частными. Очень немногие публично торгуемые компании являются частью этой тенденции, поскольку лучшие из аэрокосмических компаний следующего поколения финансируются из частных источников.
Я рад сообщить, что в ближайшие 12–24 месяца все изменится. И мы собираемся быть во всем этом.
С уважением,
Джефф Браун
Редактор, The Bleeding Edge
Искусственный интеллект и автопилот | Tesla
Чип FSD
Чип FSD
Создайте чипы логического вывода на основе ИИ для запуска нашего программного обеспечения для полного автономного вождения, учитывая каждое небольшое архитектурное и микроархитектурное усовершенствование, добиваясь максимальной производительности кремния на ватт. Выполните планирование этажей, временной и энергетический анализ проекта. Напишите надежные тесты и таблицы результатов для проверки функциональности и производительности. Внедрите драйверы для программирования и взаимодействия с чипом, уделяя особое внимание оптимизации производительности и резервированию. Наконец, проверить кремниевый чип и запустить его в массовое производство в наших автомобилях.
Выполните планирование этажей, временной и энергетический анализ проекта. Напишите надежные тесты и таблицы результатов для проверки функциональности и производительности. Внедрите драйверы для программирования и взаимодействия с чипом, уделяя особое внимание оптимизации производительности и резервированию. Наконец, проверить кремниевый чип и запустить его в массовое производство в наших автомобилях.
Чип Додзё
Чип Додзё
Создавайте тренировочные чипы ИИ для питания нашей системы Додзё. Внедряйте передовые технологии, начиная с самых маленьких обучающих узлов и заканчивая обучающими плитками с несколькими кубиками. Проектируйте и проектируйте для максимальной производительности, пропускной способности и пропускной способности на каждой ступени детализации. Диктуйте физическую методологию, планировку и другие физические аспекты чипа. Разработайте методы предварительной и постпроцессорной проверки для обеспечения функциональной корректности. Напишите компиляторы и драйверы для оптимизации мощности и производительности наших нейронных сетей во всей системе Dojo. Для получения дополнительной информации о арифметических форматах и методах Dojo загрузите наш последний технический документ.
Для получения дополнительной информации о арифметических форматах и методах Dojo загрузите наш последний технический документ.
Системы Dojo
Системы Dojo
Спроектируйте и создайте систему Dojo, начиная с интерфейсов микропрограммного обеспечения и заканчивая программными API высокого уровня, предназначенными для управления ею. Решайте сложные проблемы с помощью передовых технологий для обеспечения высокой мощности и охлаждения, а также создавайте контуры управления и масштабируемое программное обеспечение для мониторинга. Работайте над каждым аспектом системного проектирования, где пределом является только ваше воображение, используя весь потенциал наших инженеров-механиков, специалистов по теплотехнике и электротехнике для создания следующего поколения вычислительных машин с машинным обучением для использования в центрах обработки данных Tesla. Сотрудничайте с компанией Tesla, обучающей парку, для развертывания учебных рабочих нагрузок с использованием наших массивных наборов данных и разработки общедоступного API, который сделает Dojo массовым.
Нейронные сети
Нейронные сети
Применяйте передовые исследования для обучения глубоких нейронных сетей решению различных задач, от восприятия до контроля. Наши покамерные сети анализируют необработанные изображения для выполнения семантической сегментации, обнаружения объектов и монокулярной оценки глубины. Наши сети с видом с высоты птичьего полета принимают видео со всех камер для вывода схемы дороги, статической инфраструктуры и 3D-объектов непосредственно в виде сверху вниз. Наши сети извлекают уроки из самых сложных и разнообразных сценариев в мире, многократно повторяющихся в нашем парке из миллионов автомобилей в режиме реального времени. Полная сборка нейронных сетей Autopilot включает 48 сетей, на обучение которых уходит 70 000 часов GPU 🔥. Вместе они выдают 1000 различных тензоров (прогнозов) на каждом временном шаге.
Алгоритмы автономии
Алгоритмы автономии
Разработайте базовые алгоритмы, которые управляют автомобилем, создавая высокоточное представление мира и планируя траектории в этом пространстве. Чтобы обучить нейронные сети прогнозировать такие представления, алгоритмически создайте точные и крупномасштабные наземные достоверные данные, комбинируя информацию от датчиков автомобиля в пространстве и времени. Используйте самые современные методы для создания надежной системы планирования и принятия решений, которая работает в сложных реальных ситуациях в условиях неопределенности. Оцените свои алгоритмы в масштабе всего парка Tesla.
Чтобы обучить нейронные сети прогнозировать такие представления, алгоритмически создайте точные и крупномасштабные наземные достоверные данные, комбинируя информацию от датчиков автомобиля в пространстве и времени. Используйте самые современные методы для создания надежной системы планирования и принятия решений, которая работает в сложных реальных ситуациях в условиях неопределенности. Оцените свои алгоритмы в масштабе всего парка Tesla.
Основы кода
Основы кода
Пропускная способность, задержка, правильность и детерминизм — основные показатели, для которых мы оптимизируем наш код. Создавайте основы программного обеспечения Autopilot с самых нижних уровней стека, тесно интегрируя их с нашим специализированным оборудованием. Внедряйте сверхнадежные загрузчики с поддержкой беспроводных обновлений и запускайте настраиваемые ядра Linux. Напишите быстрый низкоуровневый код с эффективным использованием памяти, чтобы собирать высокочастотные и большие объемы данных с наших датчиков и делиться ими с несколькими потребительскими процессами, не влияя на задержку доступа к центральной памяти и не истощая критический функциональный код из-за циклов ЦП. Сжатие и конвейеризация вычислений на различных аппаратных процессорах, распределенных по нескольким системам на кристалле.
Сжатие и конвейеризация вычислений на различных аппаратных процессорах, распределенных по нескольким системам на кристалле.
Инфраструктура оценки
Инфраструктура оценки
Создавайте открытые и замкнутые, аппаратные средства оценки и инфраструктуру в масштабе, чтобы ускорить темпы инноваций, отслеживать улучшения производительности и предотвращать регрессии. Используйте анонимные характерные клипы из нашего парка и интегрируйте их в большие наборы тестовых случаев. Напишите код, имитирующий нашу реальную среду, создавая реалистичную графику и другие данные датчиков, которые передаются нашему программному обеспечению Autopilot для отладки в реальном времени или автоматизированного тестирования.
Tesla Bot
Tesla Bot
Разработайте следующее поколение автоматизации, включая двуногого гуманоидного робота общего назначения, способного выполнять небезопасные, повторяющиеся или скучные задачи. Мы ищем инженеров по механике, электрике, системам управления и программному обеспечению, которые помогут нам использовать наш опыт в области искусственного интеллекта за пределами нашего автопарка.