Содержание
Амурский ученый изготовил искусственные мышцы из рыболовной лески и медной проволоки — Амурская правда
Общество
Искусственные мышцы из рыболовной лески и медной проволоки — в это трудно поверить, но это возможно. Воодушевившись разработками американских коллег из Далласа, амурский ученый — популяризатор робототехники — Александр Семочкин изготовил искусственные мышцы из копеечных подручных материалов. Для их производства ученый придумал и собственноручно собрал специальную машину — скручиватель искусственных мышц. Свое изобретение он продемонстрировал на научной конференции, прошедшей в августе в США, чем произвел впечатление на ученое сообщество, увлеченное робототехникой и автоматизацией.
Американские технологии с русским акцентом
О том, что из нейлона можно делать искусственные мышцы, руководитель лаборатории информационных технологий БГПУ Александр Семочкин узнал два года назад. Тогда ему на глаза попалась статья в журнале Science группы ученых из Далласа, которые сумели сделать мышцы из нейлоновых волокон, покрытых серебром.
Тогда ему на глаза попалась статья в журнале Science группы ученых из Далласа, которые сумели сделать мышцы из нейлоновых волокон, покрытых серебром.
— В это трудно было поверить! Люди давно бьются над простым механизмом, который мог бы двигать предметы. Сейчас роботы в основном стоятся на сервоприводах, электрических моторах, на пневмо- или гидроприводах, но они все требуют каких-то дополнительных систем. Например, для пневмопривода нужен мощный компрессор, который будет качать воздух. Технически это сложные устройства, но на них сейчас делают роботов, и при этом очень эффективно. Это доступно, но дорого. А эти ребята из Далласа говорят, что можно из дешевой рыболовной лески делать мышцы! — рассказывает Александр Николаевич.
Любитель роботов из Благовещенска после этой публикации еще год ждал новой статьи в научном журнале: вдруг эти мышцы уже стали массово выпускать и продавать. «Ведь тогда мы сможем начать делать роботов на других принципах — не на моторах, а на таких мышцах. Это же круто! Они будут более человечные», — говорит ученый из БГПУ.
Это же круто! Они будут более человечные», — говорит ученый из БГПУ.
Скручиватель искусственных мышц, изобретенный Александром Семочкиным и напечатанный на 3D-принтере
Поняв, что продолжения не будет, он решил сделать искусственные мышцы самостоятельно. Вместе с коллегами из педуниверситета вручную по далласской технологии они скрутили несколько мышц. Только вместо нейлоновых волокон с серебром взяли простую рыболовную леску и медную проволоку. Однако первые изделия оказались нежизнеспособны.
Эти опыты амурские робототехники едва не забросили. Но случай снова заставил Александра Семочкина поверить в искусственные мышцы. В прошлом году он попал на конференцию по робототехнике в «Сколкове», где познакомился с руководителем фирмы «Нейроботикс» из Зеленограда. Как оказалось, изобретатели из Подмосковья тоже делают мышцы из лески и они работают.
«Правда, эта технология очень сырая, пока непригодная для создания мышц. Но вспомните Фарадея! Когда он сделал свой первый электромотор, у него проволочка крутилась в луже ртути, — это тоже все было слабо и бесперспективно.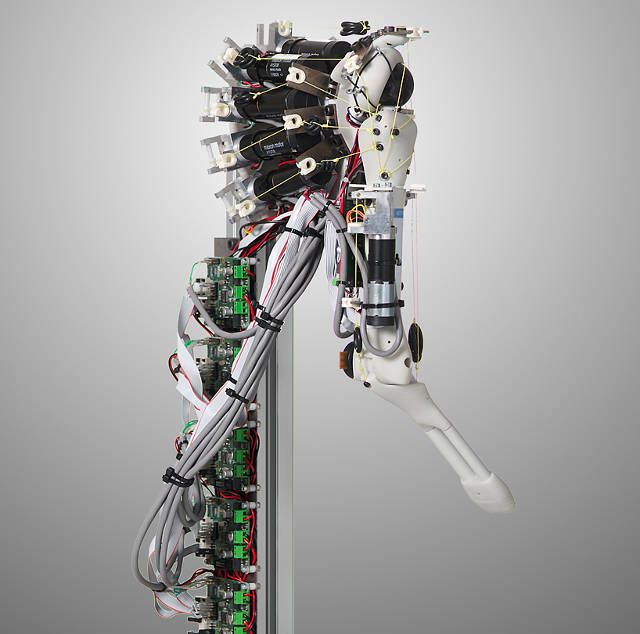 А сейчас посмотрите: уже ездят беспилотные автомобили на таких двигателях. Мне кажется, что у таких мышц есть перспективы, — уверен Александр Семочкин. — Я приехал воодушевленный из «Сколкова». И где-то за месяц-полтора сделал прибор для скручивания мышц. Прибор позволяет получать повторяемый результат, чтобы мышцы были одинаковыми. Это важно для их изучения».
А сейчас посмотрите: уже ездят беспилотные автомобили на таких двигателях. Мне кажется, что у таких мышц есть перспективы, — уверен Александр Семочкин. — Я приехал воодушевленный из «Сколкова». И где-то за месяц-полтора сделал прибор для скручивания мышц. Прибор позволяет получать повторяемый результат, чтобы мышцы были одинаковыми. Это важно для их изучения».
Как это работает
Для создания искусственной мышцы длиной примерно 5 сантиметров нужно сантиметров 20 лески и несколько метров медной проволоки. Около 10 минут прибор, изобретенный Александром Семочкиным и напечатанный на 3D-принтере, равномерно наматывает проволоку вокруг лески. Затем еще несколько минут машинка туго скручивает леску. Через какое-то время она начинает сворачиваться в спираль. Последний штрих — получившуюся мышцу помещают на 30 минут в печь, которая постепенно нагревается до 180 градусов.
Искусственные мышцы перед заключительным этапом – отправкой в печь
— Основная идея в том, что мы используем самые дешевые компоненты. И из них можно получить результат не хуже, чем из нейлона с серебром. Мне кажется, что наши должны быть долговечнее. По крайней мере, в моих экспериментах они долго работают. Пока я, конечно, целенаправленно не испытывал, сколько циклов они могут выдержать. Не входило пока в планы, — признается изобретатель.
И из них можно получить результат не хуже, чем из нейлона с серебром. Мне кажется, что наши должны быть долговечнее. По крайней мере, в моих экспериментах они долго работают. Пока я, конечно, целенаправленно не испытывал, сколько циклов они могут выдержать. Не входило пока в планы, — признается изобретатель.
В действие искусственные мышцы приводятся электрическим током. Источник подсоединяется к медной проволоке. Под небольшим напряжением медь нагревается и равномерно передает тепло нейлоновой леске. В зависимости от вида мышцы — а скручиватель способен выполнять три их разных вида — сокращаются или растягиваются.
Маленькие мышцы можно соединять последовательно — они будут длиннее и, соответственно, сокращаться на большее расстояние, а можно соединять параллельно — в этом случае мышца станет сильнее. Две тонкие мышцы, соединенные параллельно, могут поднять килограмм на несколько миллиметров.
Две тонкие мышцы, соединенные параллельно, могут поднять килограмм на несколько миллиметров.
Сейчас ученые бьются над тем, как быстро заставить мышцы возвращаться в исходное положение. Для этого проволоку необходимо охладить. Пока что самый продуктивный способ — делать это водой. В ближайшее время Александр Семочкин с коллегами продолжат работу над мышцами. Когда они сумеют заставить их работать быстро, первым обладателем искусственных мышц станет университетский антропоморфный робот Искандерус.
От роботов до медицины
— На конференции, которая прошла в августе в Техасе, я показывал именно этот прибор — скручиватель искусственных мышц. Моя цель — привлечь внимание людей к тому, что такие мышцы можно делать и у них есть перспектива, — признается Александр Семочкин.
Он планирует написать статью с подробным описанием, как самостоятельно изготовить прибор, и опубликовать ее на специализированной интернет-площадке в открытом доступе. Сейчас же Александр Николаевич делится своими разработками на канале YouTube, демонстрируя работу мышц.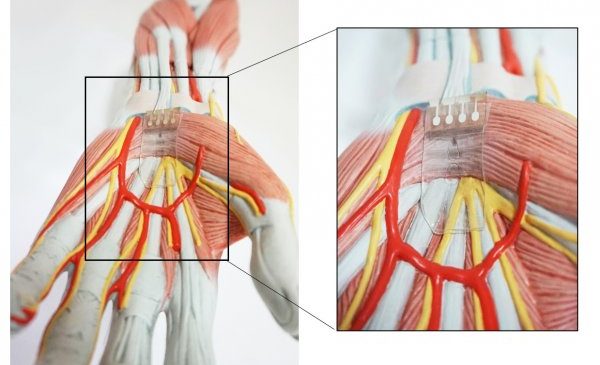
Чем больше людей будет знать об искусственных мышцах, чем больше людей займется их изучением, тем больше идей появится, как их можно использовать.
— Самый интересный способ — использовать в создании человекоподобных и подобных животным роботов. Но можно и в банальных случаях. Например, я пытаюсь сделать клапан: вода течет, подается напряжение, мышца сокращается, клапан открывается и вода выливается. Выключили ток, клапан закрылся.
Искусственные мышцы уже применили в медицине — сделали манипулятор для хирургов, выполняющих лапаро- и эндоскопические операции. Кроме того, изобретение опробовали в лаборатории Disney — здесь собрали руку.
Возрастная категория материалов: 18+
Материалы по теме
«Кванториум-28» и амурские спасатели проводят конкурс роботов среди школьниковСобирать роботов научили молодых амурчан с ограниченными возможностями здоровьяВ Благовещенске впервые прошел конкурс робототехники для школьников «Движение смелых»Амурские и питерские школьники будут собирать роботов на межрегиональном хакатоне«Танковый робобиатлон» среди сделанных школьниками роботов проведет центр «IT-Куб»Бой роботов-сумоистов: в Амгу прошли межрегиональные соревнования по робототехнике12-летний благовещенец сконструировал робота с батарейкой из лимонаБлаговещенские школьники собрали квадрокоптер для мониторинга паводков и датчик контроля за мусоромСтудент АмГУ получил патент на изобретение для тестирования космических спутниковБлаговещенская школьница научила тамагочи складывать и вычитать цифрыАмурские школьники отправили в небо 45 собственных ракет
Мощные искусственные мышцы сделали из лески и швейных ниток // Смотрим
Профиль
Искусственные мышцы
21 февраля 2014, 14:00
- Ася Горина
(фото University of Texas at Dallas).

(фото University of Texas at Dallas).
(фото University of Texas at Dallas).
(фото University of Texas at Dallas).
(фото University of Texas at Dallas).
(фото University of Texas at Dallas).
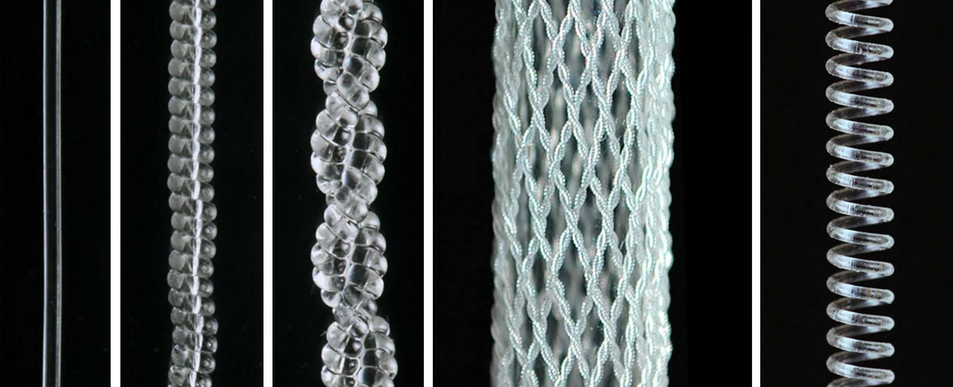
Искусственные мышцы, созданные инженерами из Техасского университета, способны поднять в сто раз больше веса и генерировать в сто раз больше механической энергии, чем человеческие мускулы. За основу конструкции учёные взяли обычные швейные нитки и рыболовные лески.
Команда инженеров из Техасского университета в Далласе сконструировала мощные искусственные мышцы. Они гораздо сильнее естественных человеческих — способны поднять в сто раз больше веса и генерировать в сто раз больше механической энергии. На самом деле, по производительности они больше напоминают реактивный двигатель: 7,1 лошадиной силы на килограмм.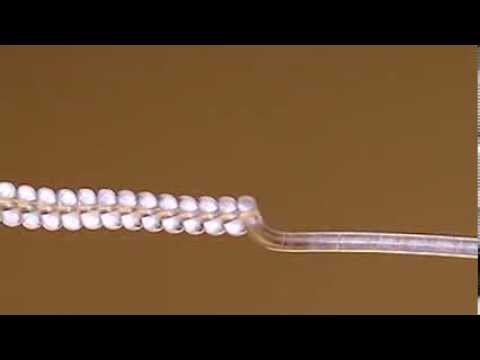 И всё это исключительно благодаря простейшим составляющим конструкции, в которую входят обычные швейные нитки и рыболовные лески.
И всё это исключительно благодаря простейшим составляющим конструкции, в которую входят обычные швейные нитки и рыболовные лески.
В своей статье, опубликованной недавно в журнале Science, исследователи объясняют, что такая мощь достигается благодаря скручиванию и наматыванию лески из высокопрочного полимера и швейных ниток.
(фото University of Texas at Dallas).
Мышцы «питаются» за счёт тепловой энергии из-за перепада температур, который можно достигнуть при поглощении света или в ходе химической реакции. Скручивание полимерного волокна преобразует его в мыщцу, способную вращать тяжёлый ротор со скоростью около 10 тысяч оборотов в минуту.
Последующее дополнительное скручивание полимерной лески конвертирует её в мышцу, которая резко сжимается вдоль своей длины при нагревании, но возвращается в исходное состояние при дальнейшем охлаждении. Интересно, что если скрутить леску в обратном направлении от изначального, то всё будет наоборот — она сожмётся при охлаждении и растянется при нагревании.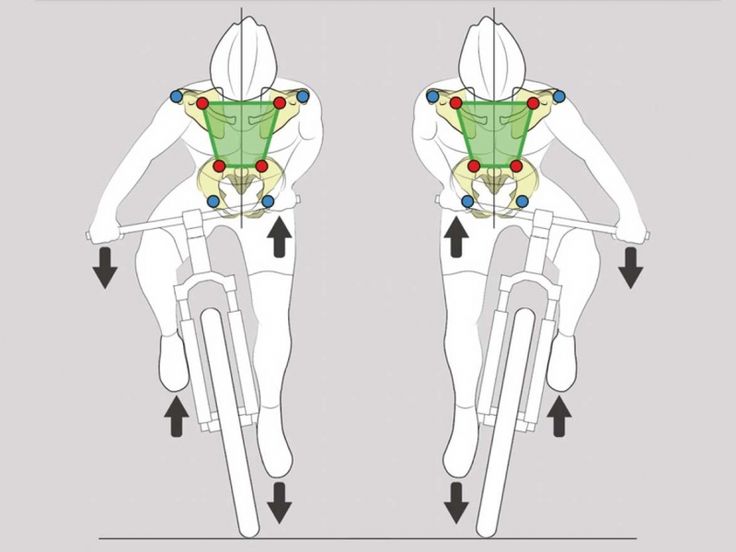
По сравнению с природными мышцами, которые способны сократиться лишь на 20%, искусственные умеют сокращаться до 50% от изначальной длины. При этом они ещё и очень выносливые, то есть не теряют своей производительности даже после нескольких миллионов сеансов механической нагрузки.
«Возможных применений для этих полимерных мышц может быть очень много. Мы видим их будущее в умных протезах, носимых экзоскелетах, конечностях роботов и любых других механических системах, конструкция которых ограничена по весу, но нуждается в высокой мощности и выносливости», — говорит соавтор исследования доктор Рэй Боман (Ray Baughman) из Института нанотехнологий при Техасском университете в Далласе.
Авторы разработки рассказывают, что каждая полимерная леска, диаметр которой всего в 10 раз больше ширины человеческого волоса, способна в одиночку поднять около 8 килограммов веса. Скрученные вместе, подобно природным человеческим мышечным волокнам, сотня лесок образует столь высокую подъёмную силу, что они могут легко поднять и удержать 0,8 тонны дополнительного веса.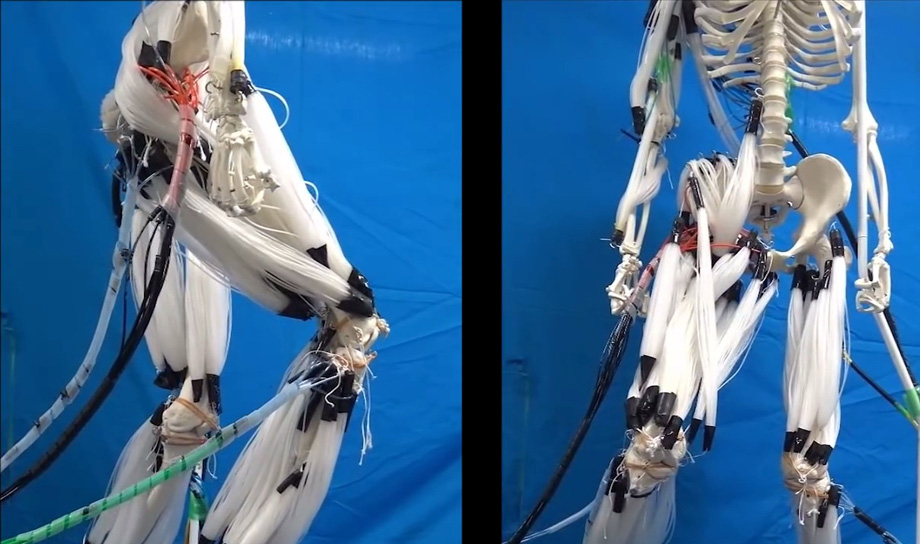
Для обеспечения питания полимерных мыщц исследователи использовали обычные швейные нитки, покрытые тонким металлическим слоем и вплетённые в общий массив скрученных лесок. В принципе, для этого можно было бы использовать и полностью металлические провода, однако из-за этого вся конструкция становится дороже.
«При практических применениях этого дополнения можно легко избежать: искусственные мышцы, если они, к примеру, встроены в конечность робота, могут питаться от перепадов температур окружающей среды», — поясняет ведущий автор исследования Картер Хейнс (Carter Haines).
Как поясняют инженеры в пресс-релизе, свойство изменения механических свойств мышцы при перепадах температур может быть использовано и в другой области — при производстве комфортной адаптирующейся под погоду одежды. Или ещё интереснее: полимерные мышцы могут реагировать на изменения температуры окружающей среды и открывать или закрывать двери на улицу, к примеру, в теплице.
 youtube.com/embed/1A2LUbJjDQ0″ allowfullscreen=»»>
youtube.com/embed/1A2LUbJjDQ0″ allowfullscreen=»»>
Также по теме:
Искусственная мышца смогла поднять вес в 80 раз больше собственного
Прозрачная искусственная мышца сыграла музыку
Искусственные мышцы из вощёных углеродных нанотрубок поразили учёных своей прочностью
Американцы натренировали мышцы перед пересадкой в организм
Учёные заставили синхронно сокращаться тысячи наномашин
новости
Весь эфир
вроцлавских инженеров создают роботизированную руку с синтетическими мышцами на основе воды – The First News
Наука
Бланка Конопка 16 ноября 2021 г.
Лукаш Козлик планирует создать самого совершенного в мире полномасштабного робота-гуманоида, получившего название «Голем», на основе искусственных мышц, который будет способен выполнять такие обязанности, как уборка и уборка.
Лукаш Козлик
Фирма из Вроцлава создала инновационную роботизированную руку, приводимую в действие синтетическими мышцами на основе воды, что дает ей полный диапазон движений и возможность поднимать тяжелые веса.
Детище «Automaton Robotics», видео руки в работе показывает, что она способна поднять 7-килограммовую гантель и действует как настоящая человеческая рука, шевеля пальцами и сжимая вес.
Видео работы руки показывает, что она способна поднять 7-килограммовую гантель и действует как настоящая человеческая рука, шевеля пальцами и сжимая вес. Clone Automation Robotics
Рука является первым прототипом компании и, несмотря на то, что она уже ведет себя как настоящая человеческая рука, содержит только половину мышц настоящей руки и все еще не имеет самой сильной мышцы, отвечающей за сгибание пальцев.
Рука также имеет датчики ориентации на каждом шарнире, которые еще необходимо полностью адаптировать для использования.
Целью компании, основанной Лукашем Козликом, является создание самого совершенного в мире полномасштабного робота-гуманоида, получившего название «Голем», на основе искусственных мышц, который будет способен выполнять такие обязанности, как уборка и уборка.
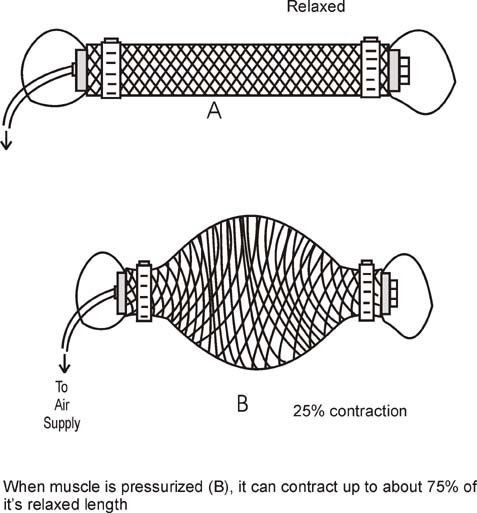
Технология, используемая Козликом для создания искусственных мышц, основана на технологии, представленной Джозефом Маккиббеном в его прототипе Воздушных мышц в 1957 году, в котором мышцы сокращаются при приложении давления воздуха.
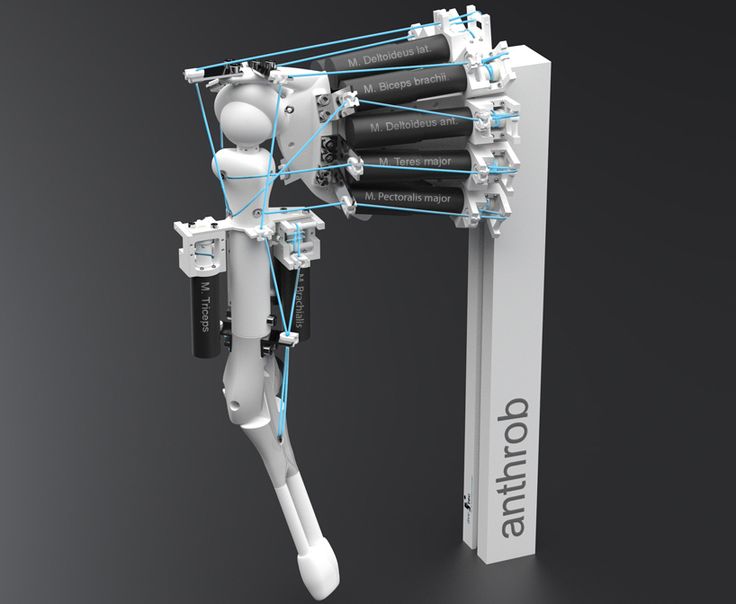
Чтобы сделать руку аутентичной и создать робота с движениями, подобными человеческим, Козлик изучал анатомию человека. Clone Automation Robotics
Однако Козлик адаптировал это, чтобы вместо этого основывать движение мышц на воде.
Козлик начал строить робота семь лет назад, в 2014 году. Первый прототип был основан на простой деревянной конструкции из деревянных панелей, веревок и петель.
Но он быстро понял, что использования веревок для управления движением недостаточно, поскольку они не производили аутентичных движений, что привело Козлика к пониманию, что если он хочет создать робота с движениями, подобными человеческим, ему нужно присмотреться поближе. по анатомии человека.
Clone Automation Robotics
Clone Automation Robotics
Козлик подробно наблюдал сеть мышц, костей, сухожилий и жира, участвующих в движении человека. Козлик подробно рассмотрел сеть мышц, костей, сухожилий и жира, участвующих в движении человека.
Пригласив своего друга Юлиша Тарновски присоединиться к нему на начальных этапах создания руки робота, пара использовала 3D-принтер для печати костей, но столкнулась с проблемой поиска электрических клапанов, достаточно маленьких для замены электрических сигналов на гидравлические.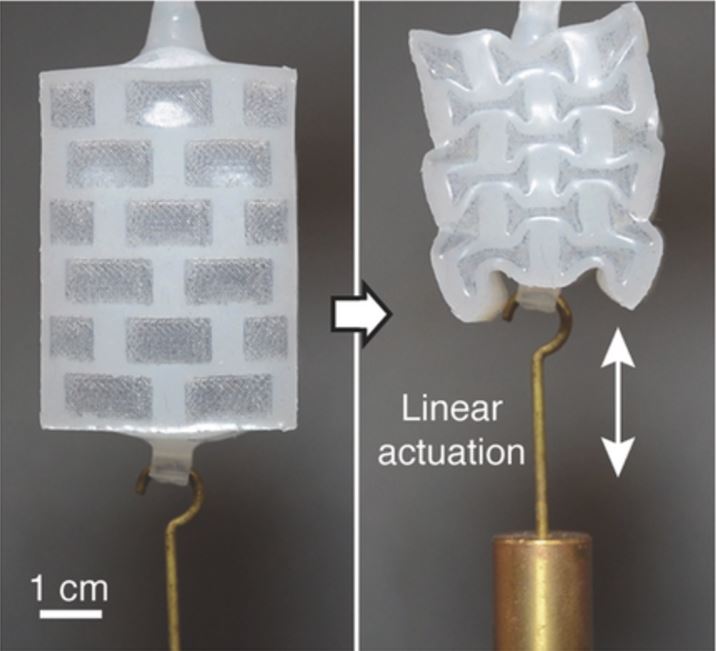
Не найдя на рынке достаточно маленьких клапанов, Козлик был вынужден сделать их сам, на что у него ушло два года.
Один из создателей Юлиш Тарновски сказал: «Рука — самый сложный механизм в человеческом теле и требует максимальной точности». Clone Automation Robotics
Юлиш Тарновски сказал Robotyka.pl: «На рынке существует некоторая конкуренция, но ни один из проектов не пытается воссоздать движение человеческой руки.
«Есть некоторые работы, цели которых схожи, но это только эксперименты. На данный момент мы создаем компанию в США и хотели бы продавать свое оружие ученым, занимающимся обучением алгоритмов, используемых в искусственном интеллекте».
Он добавил: «У готового робота должен быть рюкзак, а в нем емкость для воды и насос.
Для создания искусственных мышц Козлик адаптировал технологию 1957 года, в которой мышцы сокращаются под действием давления воздуха, чтобы вместо этого основывать движения мышц на воде. Clone Automation Robotics
«С таким рюкзаком мы сможем вместить все, что нужен робот.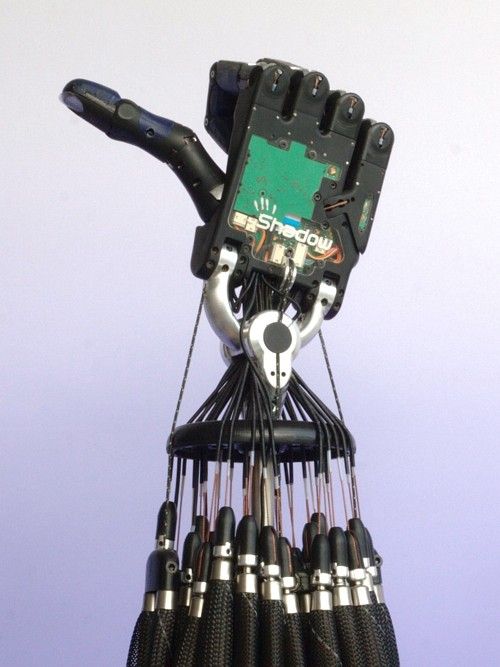
«Но пока мы концентрируемся на руке, и я думаю, что в следующем году мы не будем расширять нашу работу дальше этой темы.
«Мы хотим, чтобы все работало идеально. Рука — самый сложный механизм в человеческом теле и требует наибольшей точности, и мы обязательно столкнемся с новыми проблемами, о которых мы пока не знаем».
Метки:
Вроцлав,
робот,
робототехника,
кости,
3D печать,
инженерия,
Автомат Робототехника,
рука,
Лукаш Козлик
Поделиться:
Сплав с памятью формы
в качестве искусственного привода для экзоскелетов — HDIAC
Конечной целью исследований и разработок экзоскелетов, будь то реабилитация после травм или повышение производительности, является создание носимого человекоподобного робота, способного обнаруживать и усиливать предполагаемое движение пользователь. Во время реабилитации экзоскелеты могут использоваться для помощи в процессе перетренировки мышц. Примером этого является получение нервно-мышечной травмы, которая влияет на способность раненого бойца ходить. Экзоскелет можно использовать для движения ноги человека, чтобы имитировать его цикл походки, что переучивает его мышцы и может ускорить процесс восстановления [1]. Экзоскелеты также могут быть разработаны для повышения силы пользователя и повышения производительности на поле боя — например, костюм оператора тактического штурмового легкого командования специальных операций США (известный как TALOS) и те, которые разрабатываются в рамках веб-программы Warrior Web Program Агентства перспективных исследовательских проектов Министерства обороны США. Экзоскелеты также могут использоваться для перераспределения нагрузки, которую несет боец, что может уменьшить количество травм, полученных военнослужащими вооруженных сил США.
Во время реабилитации экзоскелеты могут использоваться для помощи в процессе перетренировки мышц. Примером этого является получение нервно-мышечной травмы, которая влияет на способность раненого бойца ходить. Экзоскелет можно использовать для движения ноги человека, чтобы имитировать его цикл походки, что переучивает его мышцы и может ускорить процесс восстановления [1]. Экзоскелеты также могут быть разработаны для повышения силы пользователя и повышения производительности на поле боя — например, костюм оператора тактического штурмового легкого командования специальных операций США (известный как TALOS) и те, которые разрабатываются в рамках веб-программы Warrior Web Program Агентства перспективных исследовательских проектов Министерства обороны США. Экзоскелеты также могут использоваться для перераспределения нагрузки, которую несет боец, что может уменьшить количество травм, полученных военнослужащими вооруженных сил США.
Наиболее распространенные методы приведения в действие современных конструкций экзоскелетов включают электродвигатели [2,3] или гидравлические приводы [4].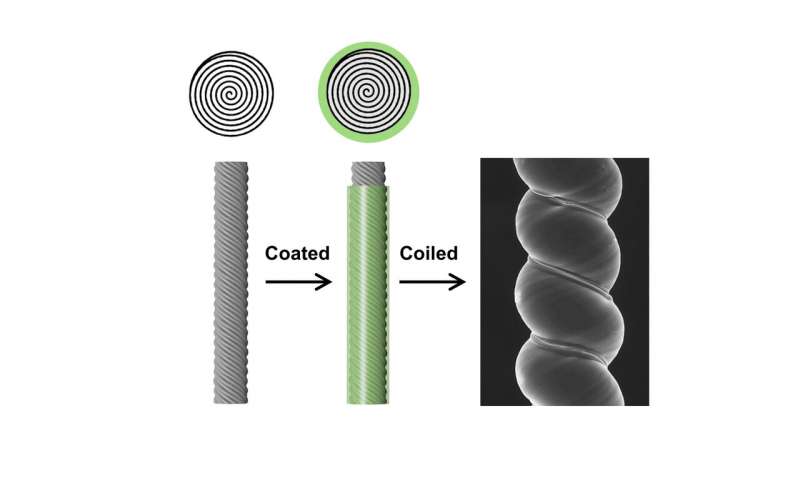 Хотя эти приводы могут воспроизводить простые движения суставов, такие как сгибание и разгибание колена, они не в состоянии воспроизвести естественное движение скелетных мышц человека. Эти традиционные формы приведения в действие также ограничены вращением только вокруг одной оси, хотя большинство суставов в человеческом теле имеют несколько степеней свободы.
Хотя эти приводы могут воспроизводить простые движения суставов, такие как сгибание и разгибание колена, они не в состоянии воспроизвести естественное движение скелетных мышц человека. Эти традиционные формы приведения в действие также ограничены вращением только вокруг одной оси, хотя большинство суставов в человеческом теле имеют несколько степеней свободы.
В отличие от классических вращательных или «штифтовых» суставов, приводимых в действие электродвигателями, жесткие кости тела соединяются в суставах через мягкие ткани, такие как связки, которые ограничивают движение, но при этом допускают несколько степеней свободы. Более естественно работающий привод позволил бы экзоскелетам учитывать эти дополнительные типы движений суставов и создавать более плавные движения экзоскелета, подобные человеческим.
Мягкая робототехника и память формы
Из-за ограничений, связанных с традиционными приводами, исследования новых приводов и мягкой робототехники расширились. Сюда входят, помимо прочего, сплавы с памятью формы (SMA), полимеры с памятью формы, приводы из диэлектрических эластомеров и пневматические искусственные мышцы. Эти приводы призваны улучшить ограничения по степеням свободы, весу и шуму традиционных двигателей и гидравлических приводов. Эти усовершенствования могут оказать особенно значительное влияние на повышение производительности экзоскелетов, позволяя бойцу выполнять
Эти приводы призваны улучшить ограничения по степеням свободы, весу и шуму традиционных двигателей и гидравлических приводов. Эти усовершенствования могут оказать особенно значительное влияние на повышение производительности экзоскелетов, позволяя бойцу выполнять
сложных движений для ношения дополнительной брони при естественном и бесшумном движении.
Сплавы с памятью формы обычно изготавливаются в виде цилиндрической проволоки и используются в качестве микроприводов, поскольку они имеют высокое отношение прочности к весу по сравнению с традиционными приводами [5, 6]. Нитинол, SMA, который имеет почти эквиатомный состав никеля и титана, является одним из наиболее часто используемых SMA, поскольку он коммерчески доступен (~ 2 доллара за фут), биосовместим [7] и имеет функциональную прочность 25 000 фунтов на квадрат. дюйм [8]. Нитинол проявляет два интересных эффекта, вызывающих большую восстанавливаемую деформацию материала. Когда температура нитинола поддерживается постоянной, а напряжение варьируется, материал проявляет псевдоупругий эффект, также известный как сверхэластичный эффект.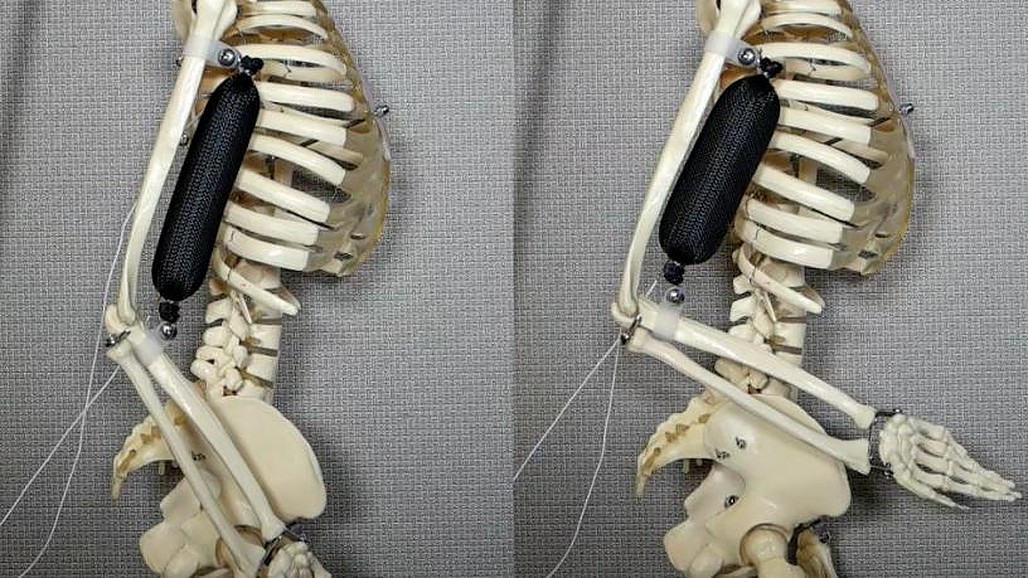
Увеличение напряжения приводит к образованию вызванного напряжением мартенсита, который заставляет проволоку удлиняться. Когда напряжение снижается, материал возвращается в аустенитную фазу и восстанавливает деформацию. (Этот эффект был продемонстрирован на прототипе перчатки, как показано на рисунке 1.) Эффект памяти формы возникает, когда напряжение поддерживается постоянным, а температура варьируется. Для линейных нитиноловых приводов приложенная нагрузка будет растягивать мартенситную фазу и увеличивать длину проволоки.
Затем температуру повышают до температуры превращения аустенита, нитинол сжимается и длина проволоки уменьшается. Эффект памяти формы является преобладающим эффектом, когда нитинол используется в качестве линейного привода, но если напряжение в системе меняется, то также играет роль эффект сверхэластичности. У SMA есть ограничения, такие как напряжение срабатывания, которое обычно составляет от 4 до 6 процентов от всей длины привода [9]. Наряду с ограниченной деформацией приводы SMA с большой силой продемонстрировали высокую потребляемую мощность для достижения реалистичного времени срабатывания при использовании в качестве искусственной мышцы [10].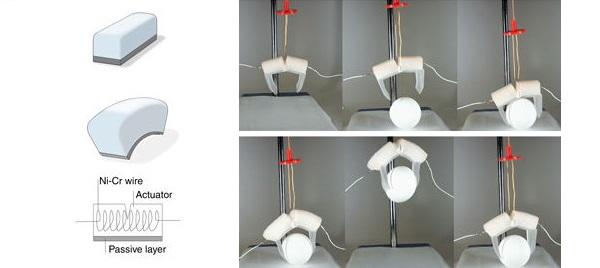
Биомимикрия мышц человека
Биомимикрия — это практика имитации естественных структур или процессов для решения сложных инженерных или дизайнерских задач. Поскольку SMA обладают способностью сокращаться и расширяться аналогично человеческим мышцам, их часто называют «искусственными мышечными приводами». Однако геометрия групп мышечных волокон человека более сложна, чем простое соединение нескольких проводов вместе в параллельной конфигурации. Саркомер образует базовую единицу скелетной мышцы и состоит из перекрывающихся слоев миозиновых и актиновых филаментов, длина которых уменьшается за счет скольжения друг по другу. Это известно как теория скользящих нитей [11]. Саркомеры соединены последовательно по длине мышцы, образуя единую миофибриллу (см. рис. 2). В этой статье предлагается использовать биомимикрию естественной организации саркомера и миофибрилл, помещая дополнительное волокно в центр пучка проводов SMA (см. Рисунок 3). Это дополнительное волокно будет служить для отвода тепла непосредственно к окружающим SMA, тем самым сжимая волокна SMA и воспроизводя эффект скользящей нити.
Теоретическая конструкция
Нитинол является SMA, выбранным для этой конструкции, поскольку он коммерчески доступен и недорог. Этот сплав также может быть предварительно подготовлен к сжатию при нагревании и расширению при охлаждении. В большинстве применений приводов SMA для повышения температуры материала используется резистивный нагрев, а для снижения температуры используется свободная конвекция с окружающим воздухом [12,13]. Однако резистивный нагрев приводит к высокому энергопотреблению системы. Это особенно очевидно, когда несколько проводов выровнены в параллельной конфигурации.
Для повышения эффективности в этой конструкции требуется дополнительный материал для отвода тепла непосредственно в SMA. В качестве вторичного нагревательного элемента выбран нихром. Нихром, никель-хромовый сплав, обычно используется в устройствах резистивного нагрева из-за его стойкости к окислению и стабильности при высоких температурах. Через нихром проходит электрический ток, что приводит к повышению температуры. Эта конструкция похожа на структуру естественной миофибриллы, с центральной нихромовой проволокой и 10 меньшими нитиноловыми проволоками, расположенными по ее окружности, как показано на рисунке 3.
Эта конструкция похожа на структуру естественной миофибриллы, с центральной нихромовой проволокой и 10 меньшими нитиноловыми проволоками, расположенными по ее окружности, как показано на рисунке 3.
В модели нихромовый сердечник был обернут каптоновой лентой (оранжевый слой на рис. 3) для предотвращения прохождения тока непосредственно к СПФ, а затем была нанесена термопаста для увеличения теплопроводности между нихромом и СПФ. Диаметр ВМА был установлен равным 0,008 дюйма, что соответствует опубликованной максимальной силе натяжения в 1,26 фунта на проволоку [8], что в сумме составляет 12,6 фунта натяжения для предлагаемой конструкции искусственной миофибриллы. Общий эффективный диаметр конфигурации составляет 0,035 дюйма, что примерно в 20 раз меньше диаметра десятицентовой монеты США. Эффективный диаметр включает нихромовый сердечник диаметром 0,016 дюйма, провод SMA диаметром 0,008 дюйма и слой изоляции из каптона толщиной 0,0015 дюйма.
Рисунок 1: Демонстрация того, как нитиноловый привод, вплетенный в перчатку, помогает сгибать пальцы.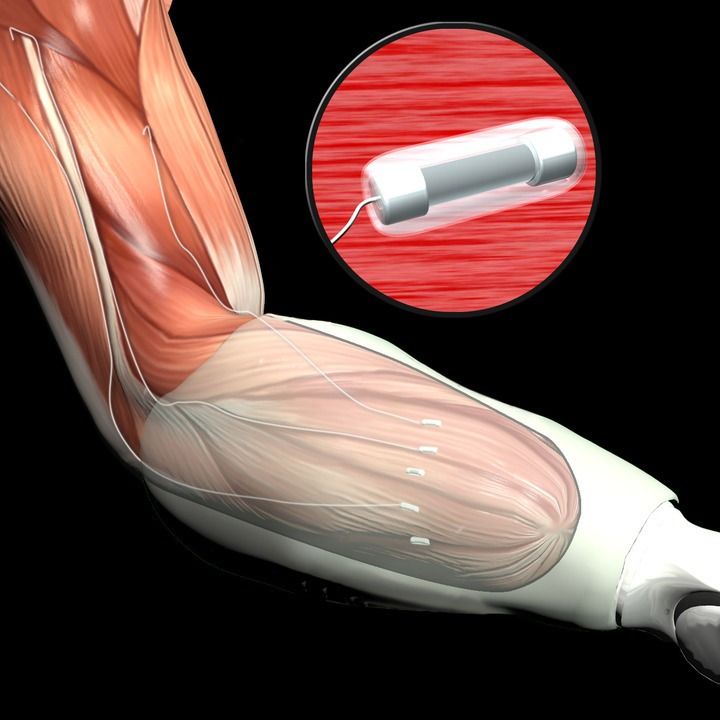
Для этого анализа диапазон рабочих температур нитиноловой проволоки был установлен от 70°C до 105°C, что соответствует деформации срабатывания в 4% от длины проволоки [8]. К конфигурации был применен термический анализ методом конечных элементов в Solidworks для оценки переходных тепловых характеристик. В качестве желаемого результата конструкции было выбрано время сокращения менее 1 секунды, поскольку оно примерно соответствует естественному темпу ходьбы человека. Входная мощность увеличивалась до тех пор, пока переходная характеристика не давала время сокращения менее 1 секунды и не составляла 4,25 Вт.
Рисунок 2: Структура скелетных мышц [15]
(Фото: Designua/Shutterstock.com)
Результаты
Между нитинолом и нихромом формируется температурный градиент со средним повышением температуры на 41,7 градуса Цельсия в секунду в SMA. провод. На начальном этапе моделирования температура нихрома увеличивается быстрее, чем проволока SMA, в то время как температурный градиент между двумя материалами увеличивается. С ростом градиента температуры увеличивается и скорость изменения температуры СПФ. Проволока SMA достигает начала области трансформации (70°C) за 0,80 секунды и достигает конца трансформации
С ростом градиента температуры увеличивается и скорость изменения температуры СПФ. Проволока SMA достигает начала области трансформации (70°C) за 0,80 секунды и достигает конца трансформации
(105°С) за 1,64 секунды. В результате время сокращения составляет примерно 0,84 секунды.
Обсуждение
Предлагаемая конструкция искусственной миофибриллы использует несколько нитиноловых проволок, расположенных по окружности вокруг вторичного материала, нихрома, используемого в качестве нагревательного элемента. Благодаря этой конструкции несколько приводов могут быть сгруппированы вместе, чтобы сформировать искусственное мышечное волокно, подобное естественным группам в скелетных мышцах человека. Кроме того, поскольку привод представляет собой одну искусственную миофибриллу, общую силу привода можно изменить, увеличив или уменьшив количество приводов в одной группе мышц.
В конечном счете, экзоскелет может быть оснащен приводом этого типа, что позволит разработать специальную искусственную мышечную систему, которая будет двигаться более естественно, как мышечная система человека, использующего экзоскелет.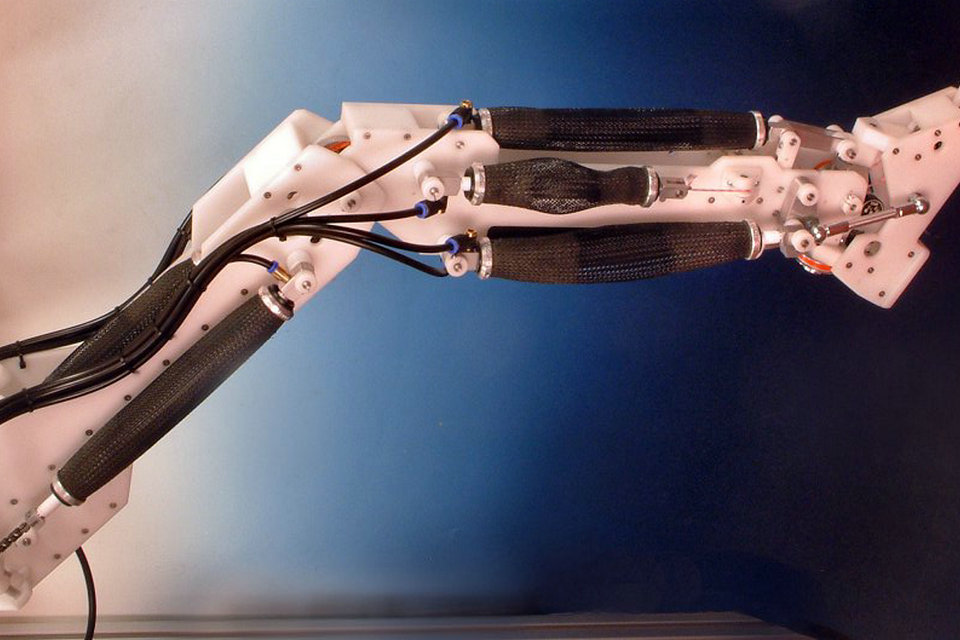 Этот тип приведения в действие обладает потенциалом для улучшения интерфейса машина-человек, поскольку искусственные мышцы могут стимулироваться электромиографическим сигналом мышц бойца. Кроме того, эта конструкция позволит приводить в действие суставы экзоскелета вокруг нескольких осей. Если бы конечности экзоскелета могли воспроизводить сложные движения суставов, это позволило бы пользователю выполнять более сложные задачи, не ограничивая собственные движения.
Этот тип приведения в действие обладает потенциалом для улучшения интерфейса машина-человек, поскольку искусственные мышцы могут стимулироваться электромиографическим сигналом мышц бойца. Кроме того, эта конструкция позволит приводить в действие суставы экзоскелета вокруг нескольких осей. Если бы конечности экзоскелета могли воспроизводить сложные движения суставов, это позволило бы пользователю выполнять более сложные задачи, не ограничивая собственные движения.
Эта технология применима не только к экзоскелетам, но и к робототехнике в целом. Например, военнослужащие могут получить травмы, приведшие к потере конечности, для чего может потребоваться протез. Многие распространенные протезы не имеют средств активного приведения в действие, а привод SMA позволит приводить протезы в действие с помощью недорогого, легкого и бесшумного привода. Активируемые протезы увеличат функциональность, позволяя пользователю выполнять задачи, которые он не мог бы выполнять иначе.
Рис. 3. Поперечное сечение конструкции искусственной миофибриллы с нихромовым центром и
Поперечное сечение конструкции искусственной миофибриллы с нихромовым центром и
окружающими проволоками SMA.
Это моделирование имеет ограничения, которые необходимо учитывать. Во-первых, он не учитывает скрытую теплоту превращения, возникающую при переходе материала из мартенсита в аустенит. Кроме того, когда материал меняет фазу, его свойства (такие как удельное электрическое сопротивление, коэффициент теплового расширения и модуль упругости) также изменяются. Наконец, моделирование не учитывает относительное изменение длины между материалами во время работы. Будущая работа будет включать в себя включение каждого из этих эффектов в более сложные модели.
Заключение
В представленной конструкции и теоретической модели нового искусственного привода используются проволоки из сплава с памятью формы, расположенные по окружности вокруг центрального нагревательного элемента из нихрома для создания мышечных сокращений. Использование биомимикрии для воспроизведения геометрии и микромасштабных движений скелетных мышц человека может привести к созданию эффективного и высокопрочного искусственного мышечного привода для использования в технологии экзоскелета для истребителя.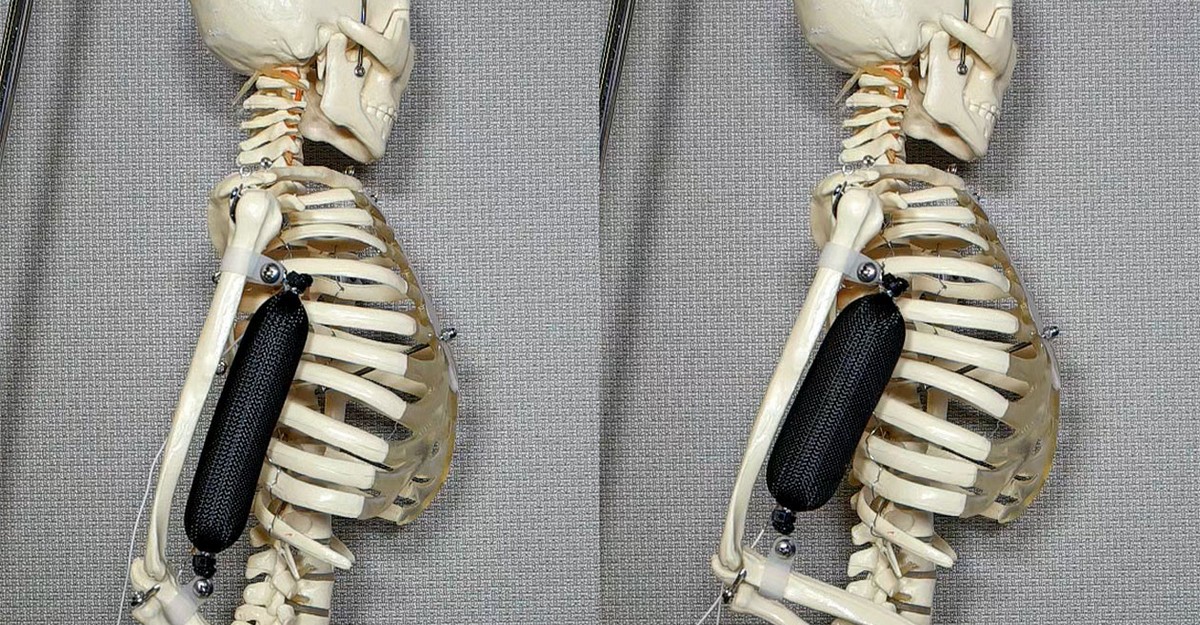 Экзоскелет с большей способностью производить более естественные движения, подобные человеческим, улучшит способность устройства способствовать реабилитации после неврологических травм, а также повысит производительность бойца на поле боя.
Экзоскелет с большей способностью производить более естественные движения, подобные человеческим, улучшит способность устройства способствовать реабилитации после неврологических травм, а также повысит производительность бойца на поле боя.
Ссылки
1. Бортоле М., Венкатакришнан А., Чжу Ф., Морено Дж. К., Франциско Г. Э., Понс Дж. Л. и Контрерас-Видаль Дж. Л. (2015). Роботизированный экзоскелет h3 для восстановления ходьбы после инсульта: первые результаты клинического исследования. Журнал нейроинженерии и реабилитации, 12 (1). doi:10.1186/s12984-015-0048-y
2. Mooney, L.M., Rouse E.J., & Herr, H.M. (2014). Автономный экзоскелет снижает метаболические затраты человека при ходьбе при переноске груза. Journal of NeuroEngineering and Rehabilitation, 11(1), 80. doi:10.1186/1743-0003-11-80
3. Хан, А. М., Юн, Д., Хан, Дж. Шин, К., и Хан, К. (2014). Робот-экзоскелет для помощи верхним конечностям. В, 23-й Международный симпозиум IEEE по интерактивному общению роботов и людей (стр. 892-898). Эдинбург, Шотландия: IEEE. doi:10.1109/ ROMAN.2014.6926366
892-898). Эдинбург, Шотландия: IEEE. doi:10.1109/ ROMAN.2014.6926366
4. Зосс. А.Б., Казеруни, Х., и Чу, А. (2006). Биомеханический дизайн экзоскелета нижних конечностей Беркли (BLEEX). IEEE/ASME Transactions on Mechatronics, 11(2), 128-138. doi:10.1109/TMECH.2006.871087
5. Икута К. (1990). Микро/миниатюрный привод из сплава с памятью формы. В материалах Международной конференции IEEE по робототехнике и автоматизации 1990 г. (стр. 2156-2161). Цинциннати, Огайо: IEEE. doi:10.1109/РОБОТ. 1990.126323
6. Несполи А., Бессегини С., Питтаччо С., Вилла Э. и Вискузо С. (2010). Высокий потенциал сплава с памятью формы в разработке миниатюрных механических устройств: обзор мини-актуаторов из сплава с памятью формы. Датчики и исполнительные механизмы A: Physical, 158(1), 149-160. doi:10.1016/j.sna.2009.12.020
7. Gil, F.J., & Planell, J.A. (1998). Сплавы с памятью формы для медицинских применений. Труды Института инженеров-механиков, Часть H: Инженерный журнал в медицине, 212 (6), 473-488.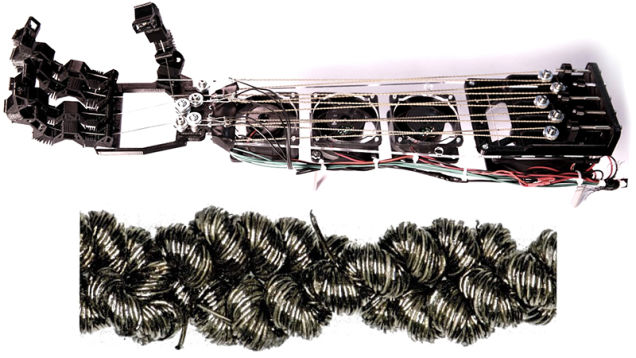 doi:10.1243/0954411981534231
doi:10.1243/0954411981534231
8. Dynalloy, Inc. (без даты). Технические характеристики приводных тросов Flexinol®. Получено с http://www.dynalloy.com/tech_sheets. php.
9. Мириев А., Стэк К. и Липсон Х. (2017). Мягкий материал для мягких приводов. Nature Communications, 8. doi:10.1038/s41467-017-00685-3
10. Сантьяго Анадон, Дж. Р. (2002). Линейный привод из сплава с памятью формы большой силы (магистерская работа). Доступно в цифровых коллекциях Университета Флориды. Получено с http://ufdc.ufl.edu/UFE1001179/00001.
11. Haselgrove, J.C., & Huxley, H.E. (1973). Рентгеновские доказательства радиального движения поперечного моста и модели скользящей нити в активно сокращающейся скелетной мышце. Журнал
молекулярной биологии, 77 (4), 549-568. doi:10.1016/0022-2836(73)90222-2
12. Вильянуэва, А.А., Джоши, К.Б., Блоттман, Дж.Б., и Прия, С. (2010). Композитный привод из сплава с памятью формы (BISMAC), созданный на основе биологических материалов. Умные материалы и конструкции, 19(2), 025013.