Содержание
Искусственные мышцы своими руками: изготовление и особенности
Современные роботы могут многое. Но при этом им далеко до человеческой легкости и грациозности движений. И вина тому — несовершенные искусственные мышцы. Ученые многих стран стараются решить эту проблему. Статья будет посвящена краткому обзору их удивительных изобретений.
Полимерные мышцы от сингапурских ученых
Шаг к более человекообразным роботам недавно сделали изобретатели из Национального университета Сингапура. Сегодня андроиды-тяжеловесы двигаются за счет работы гидравлических систем. Существенный минус последних — небольшая скорость. Искусственные же мышцы для роботов, представленные сингапурскими учеными, позволяют киборгам не только поднимать предметы, которые в 80 раз тяжелее их собственного веса, но и делать это так же быстро, как и человек.
Инновационная разработка, растягивающаяся в длину в пять раз, помогает «обойти» роботам даже муравьев, которые, как известно, могут переносить предметы в 20 раз тяжелее веса их собственного тельца. Полимерные мышцы обладают следующими достоинствами:
Полимерные мышцы обладают следующими достоинствами:
- гибкостью;
- поражающей прочностью;
- эластичностью;
- способностью менять свою форму за несколько секунд;
- возможностью преобразовывать кинетическую энергию в электрическую.
Однако на этом ученые не собираются останавливаться — в их планах создать искусственную мускулатуру, которая бы позволила роботу поднимать груз, в 500 раз тяжелее его самого!
Открытие из Гарварда — мышцы из электродов и эластомера
Изобретатели, которые трудятся в Школе прикладных и инженерных наук Гарвардского университета, представили качественно новые искусственные мышцы для так называемых «мягких» роботов. По словам ученых, их детище, состоящее из мягкого эластомера и электродов, в чьем составе углеродные нанотрубки, по своим качествам не уступает человеческой мускулатуре!
Все существующие на сегодня роботы, как уже говорилось, имеют в своей основе приводы, чей механизм — это гидравлика или пневматика. Такие системы работают за счет сжатого воздуха или реакции химических веществ. Это не позволяет сконструировать робота, такого же мягкого и быстрого, как человек. Гарвардские ученые устранили этот недостаток, создав качественно новый концепт искусственных мышц для роботов.
Такие системы работают за счет сжатого воздуха или реакции химических веществ. Это не позволяет сконструировать робота, такого же мягкого и быстрого, как человек. Гарвардские ученые устранили этот недостаток, создав качественно новый концепт искусственных мышц для роботов.
Новая «мускулатура» киборгов — многослойная структура, в которой электроды из нанотрубок, созданные в лаборатории Кларка, управляют верхними и нижними слоями гибких эластомеров, являющихся детищем ученых уже из Калифорнийского университета. Такие мышцы идеальны как для «мягких» андроидов, так и для лапароскопических инструментов в хирургии.
На этом замечательном изобретении гарвардские ученые не остановились. Одна из последних их разработок — это биоробот-скат. Его составляющие — клетки сердечных мышц крыс, золото и силикон.
Изобретение группы Баухмана: еще один вид искусственных мышц на основе углеродных нанотрубок
Еще в 1999 г. в австралийском городке Кирхберге на 13-й встрече Международной зимней школы по электронным свойствам инновационных материалов выступил с докладом ученый Рей Баухман, работающий в компании Allied Signal и возглавляющий международную исследовательскую группу. Его сообщение было на тему изготовления искусственных мышц.
Его сообщение было на тему изготовления искусственных мышц.
Разработчики под началом Рэя Баухмана смогли представить углеродные нанотрубки в виде листов нанобумаги. Трубочки в этом изобретении были всячески переплетены и перепутаны между собой. Сама нанобумага своим видом напоминала обычную — ее возможно было держать в руках, разрезать на полосы и кусочки.
Эксперимент группы с виду был очень прост — ученые прикрепили кусочки нанобумаги к разным сторонам клейкой ленты и опустили эту конструкцию в соляной электропроводный раствор. После того как была включена слабовольтная батарея, обе нанополоски удлинились, особенно та, что была связана с отрицательным полюсом электробатареи; затем бумага изогнулась. Модель искусственной мышцы функционировала.
Сам Баухман считает, что его изобретение после качественной модернизации существенно преобразит роботехнику, ведь такие углеродные мышцы при сгибании/разгибании создают электрический потенциал — производят энергию. К тому же такая мускулатура раза в три сильнее человеческой, может функционировать при крайне высоких и низких температурах, используя для своей работы невысокую силу тока и напряжения. Вполне возможно ее применение и для протезирования человеческих мышц.
Вполне возможно ее применение и для протезирования человеческих мышц.
Техасский университет: искусственные мышцы из рыболовной лески и швейных ниток
Одной из самых поразительных является работа ученой группы из Техасского университета, который расположен в Далласе. Ей удалось получить модель искусственной мускулатуры, по своей силе и мощности напоминающей реактивный двигатель — 7,1 л.с./кг! Такие мышцы в сотни раз сильнее и продуктивнее человеческих. Но самое удивительное здесь то, что их сконструировали из примитивных материалов — высокопрочной лески из полимера и швейной нитки.
Питание такой мышцы — это перепад температур. Обеспечивает его швейная нить, покрытая тонким слоем металла. Однако в будущем мышцы роботов могут подпитываться от перепадов температур окружающей их среды. Это свойство, кстати, вполне можно применять для адаптирующейся к погоде одежды и других подобных устройств.
Если скручивать полимер в одну сторону, то он будет резко сжиматься при нагревании и быстро растягиваться при охлаждении, а если в другую — то в корне наоборот. Такая нехитрая конструкция может, например, вращать габаритный ротор со скоростью 10 тыс. оборотов/мин. Плюс таких искусственных мышц из лески в том, что они способны сокращаться до 50 % от своей исходной длины (человеческие только на 20 %). Кроме этого, их отличает удивительная выносливость — эта мускулатура не «устает» даже после миллионного повторения действия!
Такая нехитрая конструкция может, например, вращать габаритный ротор со скоростью 10 тыс. оборотов/мин. Плюс таких искусственных мышц из лески в том, что они способны сокращаться до 50 % от своей исходной длины (человеческие только на 20 %). Кроме этого, их отличает удивительная выносливость — эта мускулатура не «устает» даже после миллионного повторения действия!
От Техаса до Амура
Открытие ученых из Далласа вдохновило немало ученых со всего мира. Успешно повторить их опыт, однако, удалось только одному роботехнику — Александру Николаевичу Семочкину, главе лаборатории информационных технологий при БГПУ.
Вначале изобретатель терпеливо ждал новых статей в Science о массовом внедрении в жизнь изобретения американских коллег. Так как этого не происходило, амурский ученый решил со своими единомышленниками повторить замечательный опыт и сотворить своими руками искусственные мышцы из медной проволоки и рыболовной лески. Но, увы, копия оказалась нежизнеспособной.
Вдохновение из «Сколково»
Вернуться к почти заброшенным опытам Александра Семочкина заставил случай — ученый попал на роботехническую конференцию в «Сколково», где познакомился с единомышленником из Зеленограда, руководителем компании «Нейроботикс». Как оказалось, инженеры этой фирмы тоже заняты созданием мышц из лесок, которые вполне себе жизнеспособны.
Как оказалось, инженеры этой фирмы тоже заняты созданием мышц из лесок, которые вполне себе жизнеспособны.
Вернувшись на родину, Александр Николаевич с новыми силами принялся за работу. За полтора месяца он смог не только собрать работоспособные искусственные мышцы, но и создать машину для их скручивания, которая делала витки лески строго повторяемыми.
Благовещенская искусственная мускулатура
Чтобы создать пятисантиметровую мышцу, А. Н. Семочкину нужно несколько метров проволоки и 20 см обычной рыболовной лески. Аппарат по «производству» мускулатуры, кстати, напечатанный на 3D-принтере, скручивает мышцу в течение 10 минут. Затем конструкцию на полчаса помещают в печь, раскаленную до +180 градусов по Цельсию.
Привести в действие такую мышцу можно при помощи электротока — достаточно подсоединить его источник к проволоке. В результате она начинает нагреваться и передавать свое тепло леске. Последняя вытягивается или сокращается — в зависимости от вида мышцы, которую скрутил аппарат.
Планы изобретателя
Новый проект Александра Семочкина — «научить» созданные мышцы быстрее возвращаться в исходное состояние. Этому может помочь быстрое охлаждение питающей проволоки — ученый предполагает, что такой процесс будет быстрее происходить под водой. После того как подобная мышца будет получена, первым ее обладателем станет Искандерус — антропоморфный робот БГПУ.
Ученый не держит свое изобретение в тайне — выкладывает ролики на «Ютуб», а также планирует написать статью с подробной инструкцией по созданию машинки, скручивающей мышцы из лески и проволоки.
Время не стоит на месте — искусственные мышцы, о которых мы вам рассказали, уже применяются в хирургии для проведения эндо- и лапароскопических операций. А в лаборатории «Дисней» с их участием собрали функционирующую руку.
новая методика изготовления мягких актуаторов для робототехники
Новости
Подпишитесь на автора
Подписаться
Не хочу
18
Исследователи из Колумбийского университета в Нью-Йорке изобрели искусственные мышцы, способные поднимать грузы в тысячи раз тяжелее собственной массы.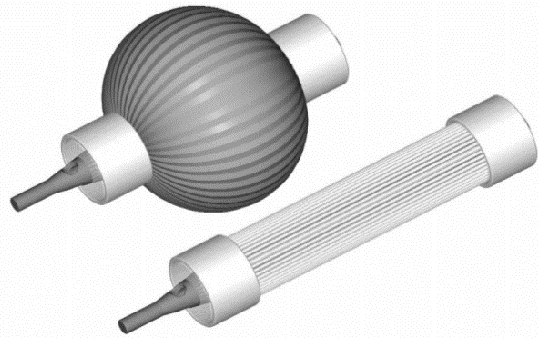 Методика изготовления настолько проста, а материалы настолько доступны, что заняться конструированием мягкой робототехники может любой желающий, особенно если в наличии имеется 3D-принтер.
Методика изготовления настолько проста, а материалы настолько доступны, что заняться конструированием мягкой робототехники может любой желающий, особенно если в наличии имеется 3D-принтер.
Несмотря на сногсшибательные успехи пермских инженеров, до настоящих «терминаторов» человечеству еще далеко. Алгоритмы постоянно совершенствуются, машины становятся все умнее – настолько, что искусственного интеллекта начинает побаиваться даже Илон Маск. А вдруг Теодор Качинский был прав? Но вот «железо» развивается куда более медленными темпами, чем «софт». Механические, пневматические и гидравлические актуаторы слишком сложны, да и зачастую ненадежны, материалы с эффектом памяти формы дороги и неэффективны, а электроактивные полимеры требуют относительно высоких энергетических затрат. Чем же приводить в движение андроидов будущего?
Свой вариант предложил доктор наук Аслан Мирийев, научный сотрудник лаборатории Creative Machines при Колумбийском университете. Идея заключается в изготовлении искусственных мышц из силиконовых эластомеров, насыщенных обычным питьевым спиртом. Этиловый спирт (хотя необязательно этиловый) играет ключевую роль, так как расширение и сокращение мышц происходит в результате перехода микрокапель этанола из жидкой фазы в газообразную и обратно. Достигается это за счет нагревания и охлаждения: испарение пойманного в силиконе спирта приводит к росту давления и, соответственно, расширению эластомерной конструкции.
Идея заключается в изготовлении искусственных мышц из силиконовых эластомеров, насыщенных обычным питьевым спиртом. Этиловый спирт (хотя необязательно этиловый) играет ключевую роль, так как расширение и сокращение мышц происходит в результате перехода микрокапель этанола из жидкой фазы в газообразную и обратно. Достигается это за счет нагревания и охлаждения: испарение пойманного в силиконе спирта приводит к росту давления и, соответственно, расширению эластомерной конструкции.
Необходимая температура задается пронизывающим мышцу линейным или спиральным электрическим нагревательным элементом. При использовании этанола максимальный эффект достигается продолжительным нагреванием чуть выше точки кипения в 78,4°С. Насколько выше, зависит от состава используемого материала, ведь силикон будет сопротивляться расширению, а чем выше плотность материала, тем выше давление и температура кипения спирта. В своих опытах Аслан остановился на материале с 20-процентным содержанием этанола, как на оптимальном.
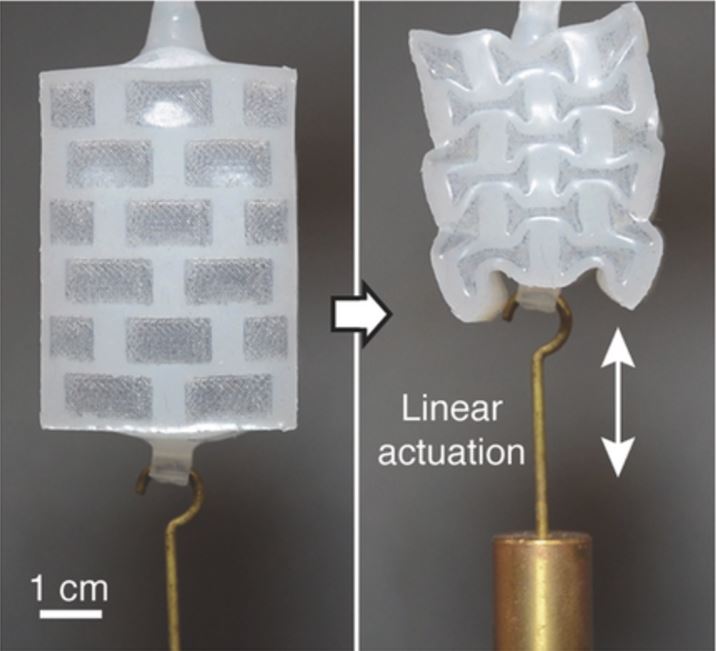
Изготавливается смесь простым смешиванием силикона и этанола в необходимых пропорциях до равномерного распределения микропузырьков спирта. Затем смесь можно использовать для литья в формы или аддитивного производства методом робокастинга, то есть экструзионной 3D-печати, но без нагревания. Например, шприцевым экструдером. В ходе экспериментов искусственные мышцы продемонстрировали способность увеличиваться в объеме на 900% и выдерживать многократные нагрузки. Так, шестиграммовый образец тридцать раз подряд поднимал и опускал груз массой около шести килограммов, то есть в тысячу раз больше собственной! Максимальные же показатели и того выше: двухграммовый мускул осилил нагрузку в 12 кг, хотя и на пределе возможностей.
Пока все замечательно, но ведь мышцы должны сокращаться, а не расширяться? Ничего страшного. Рабочий вектор можно задавать оболочками, сдерживающими расширение в заданной плоскости. Например, бицепсы и трицепсы на иллюстрации выше заключены в сетку фиксированной длины, прикрепленную концами к плечу и предплечью. Диаметральное расширение приводит к продольному сокращению, как это происходит с настоящими мускулами. В этом примере использовались 13-граммовые мышцы, способные поднимать вес до одного килограмма при нагревании спиральным элементом из нихромовой проволоки под напряжением 30В с силой тока в 1,5А. Изгиб же можно задавать с помощью «пассивных» слоев из гибких материалов с относительно высоким сопротивлением на растяжение, наносимых на «внутреннюю» сторону деформируемого актуатора, как в примере с захватом на иллюстрации ниже.
Диаметральное расширение приводит к продольному сокращению, как это происходит с настоящими мускулами. В этом примере использовались 13-граммовые мышцы, способные поднимать вес до одного килограмма при нагревании спиральным элементом из нихромовой проволоки под напряжением 30В с силой тока в 1,5А. Изгиб же можно задавать с помощью «пассивных» слоев из гибких материалов с относительно высоким сопротивлением на растяжение, наносимых на «внутреннюю» сторону деформируемого актуатора, как в примере с захватом на иллюстрации ниже.
Лабораторная стоимость изготовления таких мышц в пересчете на грамм не превышала трех центов. Для печати опытных конструкций из термопластов использовались настольные FDM 3D-принтеры Ultimaker, Ultimaker 2+ и Stratasys uPrint, тогда как печать непосредственно искусственных мышц осуществлялась на самодельном двухэкструдерном 3D-принтере, оснащенном шприцевыми головками. С полным докладом можно ознакомиться по этой ссылке.
 youtube.com/embed/1J47difr3oo?enablejsapi=1&widgetid=1″ allowfullscreen=»1″>
youtube.com/embed/1J47difr3oo?enablejsapi=1&widgetid=1″ allowfullscreen=»1″>
А у вас есть интересные новости? Поделитесь с нами своими разработками, и мы расскажем о них всему миру! Ждем ваши идеи по адресу [email protected].
Подпишитесь на автора
Подписаться
Не хочу
18
Еще больше интересных статей
12
Подпишитесь на автора
Подписаться
Не хочу
В селе Айша Зеленодольского района Татарстана идут работы по возведению тридцати четырех домов с исп…
Читать дальше
10
Подпишитесь на автора
Подписаться
Не хочу
Проект носит опытный и символический характер: конструкция возведена компанией 3D4Art, чтобы отметит…
Читать дальше
sarkazm
Загрузка
01. 04.2016
04.2016
39799
68
Подпишитесь на автора
Подписаться
Не хочу
Новости из мира печати короткой строкой
Компания FDplast объявила о выпуске бесплат…
Читать дальше
Искусственная мышца | Хакадей
28 октября 2021 г., Райан Флауэрс
Википедия говорит: «Гипотеза зловещей долины предсказывает, что сущность, выглядящая почти как человек, рискует вызвать у зрителей холодные, жуткие чувства». И да, мы должны признать, что каким бы невероятным это ни было, видеть, как рука и предплечье [Automaton Robotics] двигаются почти по-человечески, немного тревожно. Не верьте нам на слово, позвольте себе быть очарованным и сбитым с толку видео под перерывом.
Хотя создатели робо-манипулятора с искусственными мышцами довольно умалчивают о том, как он работает, просмотр канала [Automaton Robotics] на YouTube проливает некоторый свет на этот вопрос.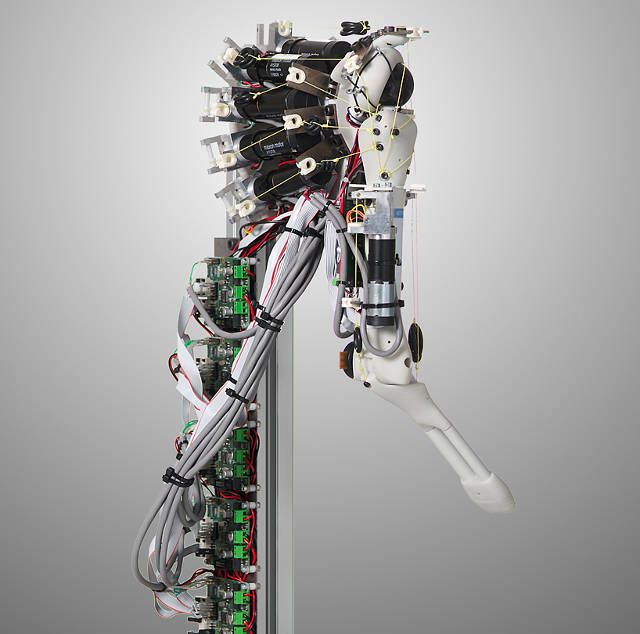 Движение рук и кистей стало возможным благодаря искусственным мышцам, которые сами оживляются водой под давлением 130 фунтов на квадратный дюйм (9 бар). Сами мышцы представляют собой водонепроницаемое переплетение волокон, но эти подробности не приводятся. Пузыри внутри гибкой стальной сетки, как ловушки для пальцев?
Движение рук и кистей стало возможным благодаря искусственным мышцам, которые сами оживляются водой под давлением 130 фунтов на квадратный дюйм (9 бар). Сами мышцы представляют собой водонепроницаемое переплетение волокон, но эти подробности не приводятся. Пузыри внутри гибкой стальной сетки, как ловушки для пальцев?
9Цель 0002 [Automaton Robotics] состоит в том, чтобы в конечном итоге создать робота-гуманоида, используя их технологию искусственных мышц. Показанная демонстрация очень впечатляет, поскольку рука способна поднять гантель весом 7 кг (15,6 фунта), хотя некоторые из ее самых сильных искусственных мышц еще не установлены.
Несколько лет назад мы публиковали статью об искусственных мышцах, в которой упоминались пневматические искусственные мышцы, сокращающиеся при приложении давления воздуха, и кажется, что [Automaton Robotics] вместо этого использовала тот же метод с водой. о чем ты думаешь? Пожалуйста, дайте нам знать в комментариях ниже. Также спасибо [The Kilted Swede] за отличный совет! Обязательно присылайте и свои советы!
Продолжить чтение «Прогулка по зловещей долине с роботизированной рукой с искусственными мышцами» →
Posted in Robots HacksTagged искусственная мышца, гидравлика, рука робота, сверхъестественная долина, давление воды
21 октября 2020 г. , Левин Дэй
, Левин Дэй
Идея создания костюма, увеличивающего силу владельца, очень привлекательна и часто фигурирует в научной фантастике. Есть несколько реальных примеров, и теперь [Алекс] может добавить свой в список. Однако сборка имеет изюминку, полагаясь на водород для выполнения работы.
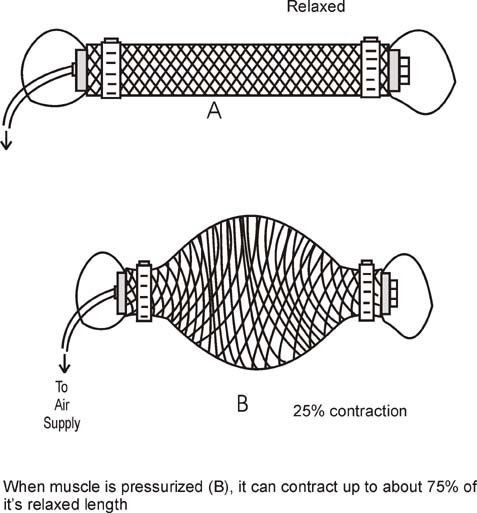
По своей сути конструкция ничем не отличается от других проектов с искусственными мышцами. Мышцы в телосложении [Алекса] состоят из резиновой трубки внутри нейлоновой оплетки. Когда резиновая трубка надувается, она расширяется, в результате чего нейлоновая оплетка укорачивается по мере расширения. Обычно в таких конструкциях для питания мышц используется сжатый воздух, однако [Алекс] пошел другим путем. Вместо этого вода подвергается электролизу в камере, похожей на дуговой реактор Железного человека, а образующиеся в результате газы используются для приведения в движение мышц. С пятью мышцами, сгруппированными, чтобы тянуть вместе, носимый подлокотник способен генерировать тяговое усилие до 15 кг.
Этот дизайн имеет несколько преимуществ; электролизер не имеет движущихся частей, он намного проще и тише обычного воздушного компрессора. Очевидно, что существует риск возгорания из-за используемых легковоспламеняющихся газов, но [Алекс] объясняет меры предосторожности, принятые для минимизации этого риска, в видео.
Экзокостюмы, возможно, еще не стали мейнстримом, но это не значит, что люди не работают над тем, чтобы сделать их реальностью. Мы уже показывали некоторые из них, например, этот дизайн с открытым исходным кодом. Видео после перерыва.
Продолжить чтение «Мышцы экзоскелета, работающие на водороде» →
Posted in Robots HacksTagged искусственная мышца, экзоскелет, железный человек, мышца
11 июля 2018 г., Дональд Папп
Знаете ли вы, что при определенных условиях нейлон можно использовать в качестве искусственной мышцы? Мы, конечно, не знали, пока не наткнулись [Брэндона Т. Вуда] на премию Hackaday Prize 2018 Material Linear-Actuator for Robotics.
Вуда] на премию Hackaday Prize 2018 Material Linear-Actuator for Robotics.
Когда [Брэндон] впервые узнал о нейлоновых линейных материальных приводах (NLMA), он решил найти воспроизводимый и практичный метод их изготовления и экспериментов с ними. Вот как это работает: гипернамотанные катушки нейлона при нагревании будут сокращаться по длине и расширяться по ширине. При остывании они возвращаются к своей первоначальной форме.
[Брэндон] был занят в основном важной, но не очень яркой работой: поиском доступных методов надежного создания нитей искусственных нейлоновых мышц дешево и надежно. В его нынешнем методе используется приспособление для намотки нейлоновой лески до тех пор, пока она туго не намотается на себя, а затем накручивается отрезок нихромовой проволоки вокруг внешней стороны, чтобы действовать как нагреватель. Используя этот метод, катушки могут управляться электрически. [Брэндон] в настоящее время экспериментирует с созданием связок из отдельных нейлоновых спиралей, чтобы они действовали вместе как одна большая мышца, потому что, хотя одна проволока не особенно прочная, с пучком может быть совсем другая история.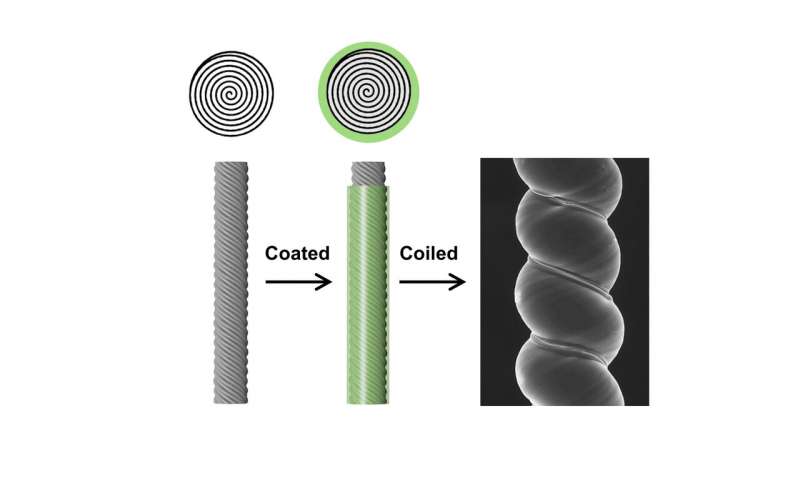 Это определенно необычно и проделывает большую работу, чтобы превратить известное явление во что-то, что можно взломать, что делает его приятным для участия в премии Hackaday в этом году.
Это определенно необычно и проделывает большую работу, чтобы превратить известное явление во что-то, что можно взломать, что делает его приятным для участия в премии Hackaday в этом году.
Posted in Премия HackadayTagged Премия Hackaday 2018, искусственная мышца, мышечная проволока, нихром, NLMA, Нейлоновый линейный материал, нейлоновая мышца, робототехника
16 мая 2018 г. Брайан МакЭвой
Неудивительно, что электрические угри имеют плохую репутацию за то, что они страшные существа. Это скользкие мясистые водяные змеи, которые могут призывать молнии. Биологи и инженеры из Калифорнийского университета имели в виду нечто иное, когда создавали своего электрического угря. Вместо того, чтобы охотиться на рыбу, этот безобидно плавает рядом с ними.
Традиционные дистанционно управляемые транспортные средства полагались на твердые корпуса и вращающиеся пропеллеры. Для морских обитателей это шумно и неестественно. Молчаливый пловец не поднимает бровей, не то чтобы у рыб были брови. Самой инновационной особенностью являются искусственные мышцы, и, хотя подробностей мало, они, кажется, используют среду внутри для проведения заряда, а снаружи среда соленой воды проводит противоположный заряд, что вызывает сокращение мембраны между внутрь и наружу. Некоторое плавание можно увидеть ниже разрыва, и, возможно, один из наших проницательных читателей сможет пролить свет на список материалов этого подводного авантюриста.
Молчаливый пловец не поднимает бровей, не то чтобы у рыб были брови. Самой инновационной особенностью являются искусственные мышцы, и, хотя подробностей мало, они, кажется, используют среду внутри для проведения заряда, а снаружи среда соленой воды проводит противоположный заряд, что вызывает сокращение мембраны между внутрь и наружу. Некоторое плавание можно увидеть ниже разрыва, и, возможно, один из наших проницательных читателей сможет пролить свет на список материалов этого подводного авантюриста.
Одна из наших любимых подводных лодок — лауреат премии Hackaday 2017 года, подводный планер с открытым исходным кодом. Для более художественной интерпретации подводных аппаратов Curv II является одним из самых элегантных, которые мы когда-либо видели.
Читать далее «Нежный электрический угорь» →
Posted in Robots HacksTagged искусственная мускулатура, биология, угорь, морской, робототехника, подводная лодка, плавать, под водой
7 сентября 2016 г. Стивен Дюфресн
Стивен Дюфресн
Возможно, наши будущие повелители не будут состоять из электрических цепей, а будут мягкотелыми, как и мы сами. Однако их конструкция будет заимствована из электрических аналогов, таких как Octobot.
Octobot — детище группы исследователей из Гарвардского университета, которая недавно опубликовала статью о нем в журнале Nature. Его тело смоделировано по образцу осьминога и состоит из всех мягких частей тела, которые были созданы с использованием комбинации 3D-печати, литья и мягкой литографии. Два набора рук по обе стороны от Октобота двигаются по очереди под управлением схемы мягкого осциллятора. Вы можете увидеть его в действии на видео ниже.
Читать далее «Мягкий робот с микрожидкостной логической схемой» →
Posted in Robots HacksTagged искусственная мышца, автономный робот, биохакинг, перекись водорода, микрожидкость, осьминог, осциллятор, кислород, роботизированный осьминог, плавание
6 июня 2016 г.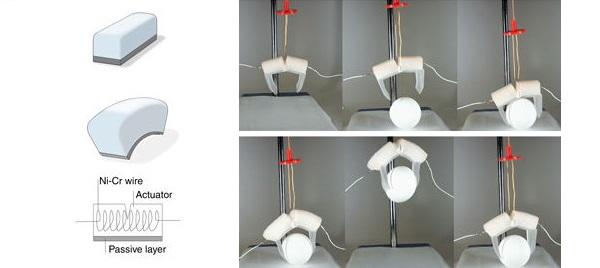 Мориц Вальтер
Мориц Вальтер
Индивидуальные роботизированные протезы набирают популярность. В многочисленных проектах хакеры и производители приняли вызов. От Enabling The Future, Open Hand Project, OpenBionics до бесчисленных проектов протезов на Hackaday.io. Тем не менее, мехатроника, которая приводит в действие большинство из них, все еще из прошлого века. В конце концов, в пластиковую руку можно поместить только такое количество миниатюрных моторов и шестерен, а на руку или ногу можно поместить только такое количество гидравлики, прежде чем она станет медленным тяжелым кирпичом – больше мешает, чем помогает. Если бы только у нас было несколько дополнительных этих легких, быстрых и мощных приводов, которые помогают нам прожить весь день. Если бы у нас были искусственные мышцы.
Продолжить чтение «Искусственные мышцы для облегчения роботизированного напряжения» →
Рубрика: Куратор, Колонки Hackaday, Медицинские хаки, Оригинальное искусство, Взломы роботовпомеченный искусственная мышца, электроактивные полимеры, мышцы, пневматические мышцы, роботизированный протез, робототехника, термически активируемые мышцы
16 сентября 2015 г.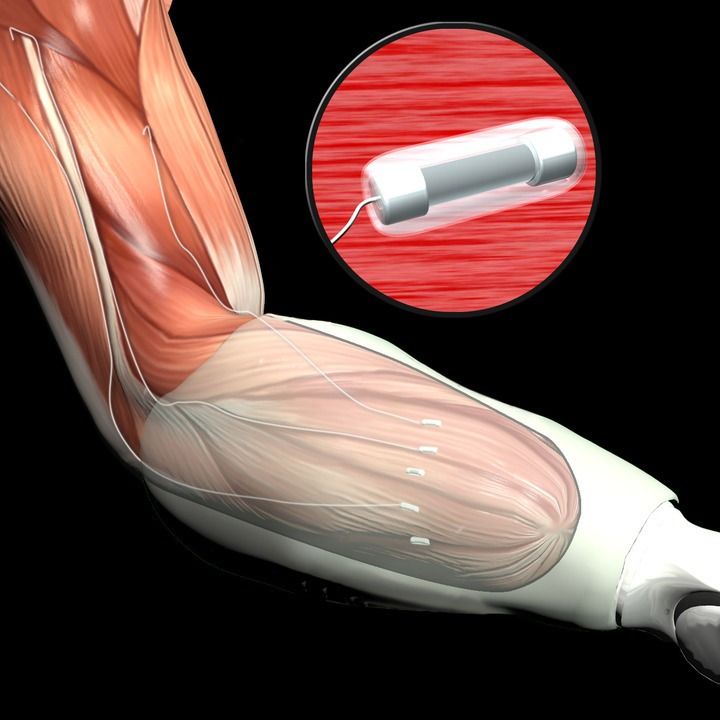 Брайан Бенчофф
Брайан Бенчофф
Для того, чтобы [Ллойд Т Кэннон III] стал участником Hackaday Prize, он сделал не что иное, как изменение способа движения всего. Последние 100 лет двигатели внутреннего сгорания приводили в движение самолеты, поезда и автомобили, и только недавно люди начали интересоваться батареями и электродвигателями. Со своими суперконденсаторами и искусственными мышцами [Ллойд] на несколько десятилетий опережает всех остальных.
Проект [Ллойда] состоит из двух частей, первой из которых является устройство хранения энергии. Он строит гибридную литий-серно-кремниевую батарею. Аккумуляторы Li-S-Si обещают обеспечить до 2000 ватт-часов на килограмм батареи. Для сравнения, даже передовые литиевые батареи потребляют около 2-300 Втч/кг. Это разница почти на порядок, и, хотя это далеко от ископаемого топлива, это значительно увеличило бы диапазон электромобилей и сделало бы возможными многие другие технологии.
Другая часть проекта [Ллойда] — искусственные мышцы. Двигатели не очень эффективны, а электродвигатели хороши только в том случае, если вы хотите что-то крутить. Для робототехники нужны мышцы, и [Ллойд] строит их из лески. Эти мышцы сокращаются из-за резистивного нагрева нити из углеродного волокна, встроенной в мышцу. Это делалось и раньше, но это первый проект, который мы видели, который воспроизводит технику в гаражной лаборатории.
Двигатели не очень эффективны, а электродвигатели хороши только в том случае, если вы хотите что-то крутить. Для робототехники нужны мышцы, и [Ллойд] строит их из лески. Эти мышцы сокращаются из-за резистивного нагрева нити из углеродного волокна, встроенной в мышцу. Это делалось и раньше, но это первый проект, который мы видели, который воспроизводит технику в гаражной лаборатории.
Обе части проекта [Ллойда] сами по себе достойны участия в Hackaday Prize, но объединение их в один проект более чем соответствует цели: создать что-то важное.
Спонсором Hackaday Prize 2015 является:
Posted in Robots Hacks, The Hackaday PrizeTagged Hackaday Prize 2015, искусственная мышца, батарея, Hackaday Prize, LiSSi, мышца, суперконденсатор, приз Hackaday
WriterOfMinds: самодельные искусственные мышцы из лески: первые результаты
Примерно две с половиной недели назад некоторые
В Сеть попали захватывающие новости: исследователи из университета
из Техаса в Далласе сделали искусственные мышцы из нейлона
монофиламентная леска. Все, что нужно, чтобы превратить простую нить пластика
Все, что нужно, чтобы превратить простую нить пластика
в устройство, которое может толкать и тянуть, является особым методом
скручивание; однажды сформированная в форме, линия будет сжиматься при нагревании
и вернуться к своей прежней форме при охлаждении. Есть множество
статьи об открытии, но мой личный фаворит — это очень
полное предложение от io9: Ученые только что создали одни из самых мощных мышц в мире. Это видео от SciencePlanetMedia также является информативным: Наука об искусственных мышцах. Искусственные мышечные материалы существуют уже некоторое время, но они
исключительны тем, что звучат так, как будто их можно легко
сделано любителем из дешевых материалов. Я не могу сопротивляться. Этот
месячный проект будет заключаться в том, чтобы посмотреть, смогу ли я повторить работу этого
исследовательской группы и сделать несколько собственных искусственных мышц.
Я готов заявить о предварительном успехе
по Фазе I проекта: создание мускула лески и получение
это реагировать на тепло.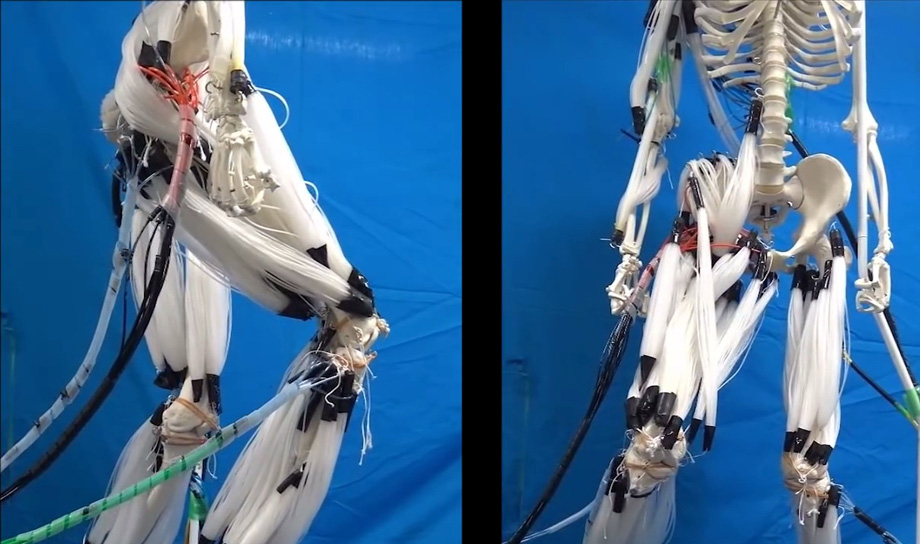 Сегодня я сделал и проверил оба гомохиральных
Сегодня я сделал и проверил оба гомохиральных
мышца (сокращается при нагревании) и гетерохиральная мышца (расширяется
при нагревании). Уроки, извлеченные в процессе, написаны ниже для
ваше назидание.
| Д’Артаньян осматривает готовую гомохиральную мышцу. |
Первый шаг в создании одного из
эти мышцы должны правильно скрутить нить. Так как нить
закручены, сначала будут видны только простые изгибы; но в конце концов,
вторичные петли начнут формироваться. (Вы можете увидеть крупным планом
демонстрация в одном из видео из статьи io9.) У вас есть
крутить нить до тех пор, пока она не будет полностью собрана в этих вторичных
петли, потому что эта структура обеспечивает волшебство, которое заставляет мышцы
двигаться линейно, а не торсионно. Звучит достаточно просто, верно?
Оказывается, делать эти петли не
всегда так просто, как это выглядит на видео.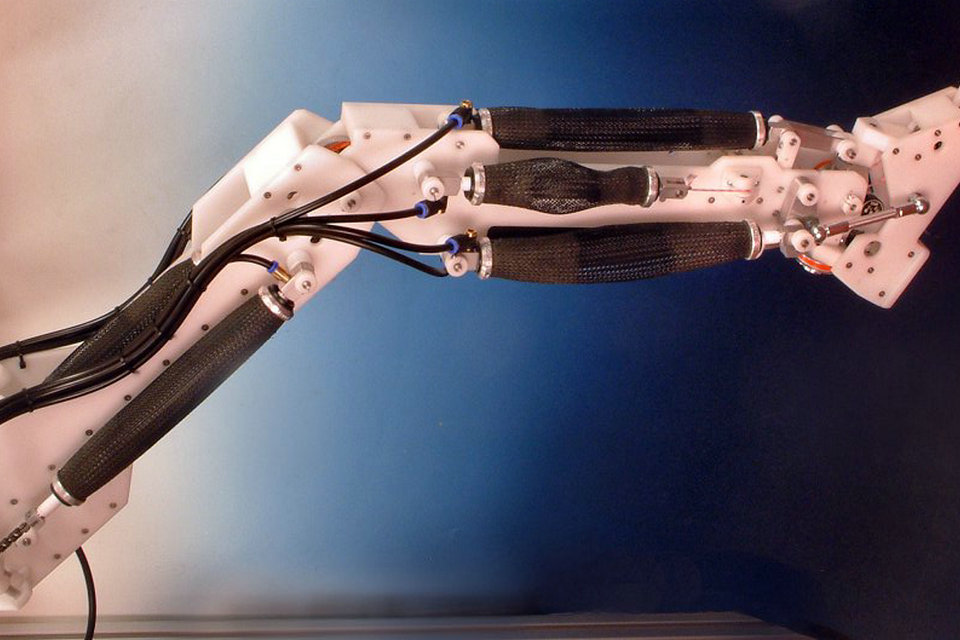 Я обнаружил, что как только
Я обнаружил, что как только
начали формироваться вторичные петли, нить захотела перекрутиться
боком и закручиваются вокруг себя, образуя «бакенбарды», вытягиваясь
горизонтально от нити. Как только эти усы пошли,
дальнейшее скручивание, как правило, увеличивало их длину, а не увеличивало
больше петель в основной нити. В итоге получился такой бардак
это:
Проблема может быть в моих материалах.
Я не использую леску любой ширины, указанной в
работу исследователей. Я использую дешевый нейлоновый шнур для бисероплетения.
неуказанный диаметр, изготовленный Кузеном. Он довольно тонкий и имеет
испытательная прочность всего 8 фунтов (3,6 кг). надо будет попробовать процесс
снова с более толстыми и качественными шнурами. Но пока я их не получу,
Я нашел обходной путь. Он основан на той же технике, что и вы.
использовать в любом случае, если вы хотите, чтобы мышцы расширялись при
с подогревом.
Начните с удвоения нити, чтобы сделать
крепче, вставив одну скрепку внутрь сдвоенного конца и завязав
два свободных конца вместе вокруг другой скрепки.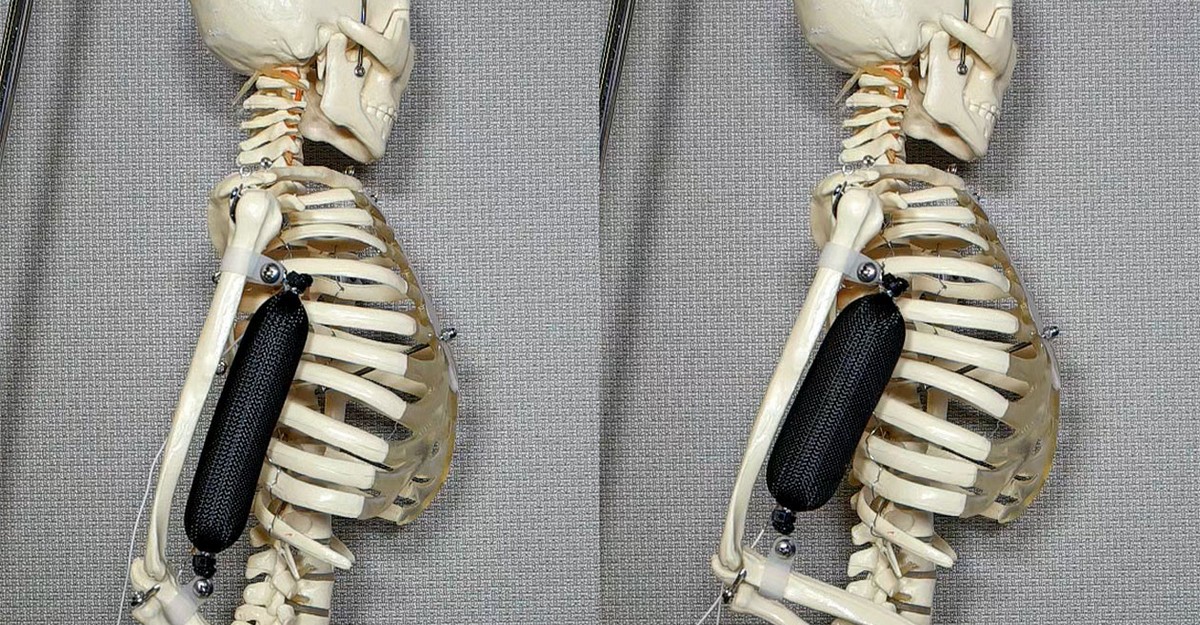 Использовать
Использовать
неизолированные скрепки, потому что позже они отправятся в духовку.
Свободно скручивайте шнур до тех пор, пока второстепенные петли не сойдутся.
приступить к формированию. Вы можете подключить одну скрепку к дрели, чтобы ускорить
эта часть процесса. В дополнение к фиксации другого конца, чтобы он
не может вращаться, положите на него груз, чтобы обеспечить небольшое натяжение. Однажды
первый этап скручивания сделан, создайте второй этап
вручную наматывая шнур на металлический стержень (это может быть не что иное, как
проволока от скрепки, если вы хотите узкую катушку). Именно в этот момент
вы должны решить, хотите ли вы гомохиральную или гетерохиральную мышцу.
Для гомохиральной мышцы сделайте вторичные повороты в том же
направление как первичные завихрения. Если вы не знаете, в каком направлении
то есть ослабьте немного натяжение шнура и посмотрите, какой
направление, в котором будет двигаться результирующая петля. Для гетерохиральной мышцы сделайте
вторичные закручиваются в направлении, противоположном первичным.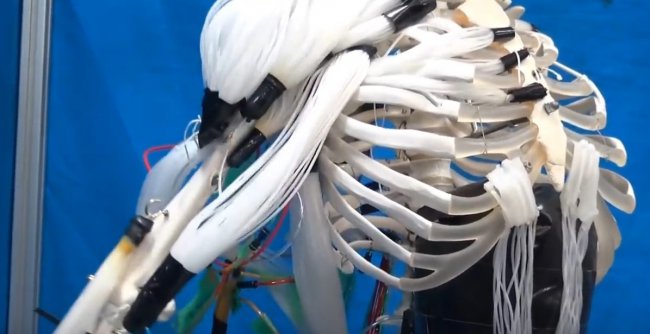
Сохраняйте некоторое натяжение шнура, когда вы оборачиваете его вокруг стержня, чтобы
он не может выскакивать из стороны в сторону, чтобы делать усы или делать другие глупости. Сдвигайте катушки друг против друга по мере их изготовления, чтобы они занимали минимальное количество места на стержне. Когда закончите, используйте скрепки типа «крокодил», чтобы прикрепить скрепки к стержню, чтобы ваш
мышцы не могут раскрутиться сами по себе.
Далее идет термическая обработка (отжиг). Этот
процесс заставляет нейлоновую нить постоянно
принять новую форму, которую вы ему придали, чтобы он не пытался раскрутиться
опять таки. Я отожгла свои мышцы в тостере. Будьте осторожны – если
вы оставите их там слишком долго, они растают! Это займет всего
пару минут при 200-300 F
чтобы накачать мышцы (может быть, дольше, если ваша духовка начинает работать с холода, как камень, или если вы используете толстый стержень, которому требуется больше времени, чтобы нагреться). Как только они будут готовы, вытащите стержень из духовки с помощью пары
плоскогубцами и опустите в холодную воду. Ваша мышца должна соскользнуть с
Ваша мышца должна соскользнуть с
стержень легко и должен держать свою форму, как маленькая спиральная пружина.
| Мой тостер становится двигателем Безумной Науки так же часто, как и приготовлением тостов. |
Я рекомендую проверить мышцы феном или тепловым пистолетом, если он у вас есть. Мой
Единственный портативный источник тепла — это паяльник, поэтому я тестировал его.
Это было не идеально, особенно потому, что было трудно разогреть всю мышцу сразу, но я смог увидеть реакцию. Мой
расширяющаяся (гетерохиральная) мышца, которую я сделал на стержне диаметром 2 мм,
работал особенно хорошо. Если бы я держал его горизонтально и поднес
паяльником под ним, чтобы горячий воздух поднимался от утюга
текла по мышце, она расширялась и обвисала. После того, как я взял
утюг прочь, он снова затянется. Сокращающаяся мышца, образованная
вокруг большой развернутой скрепки для более тугих катушек, также ответил:
но не так явно.