Содержание
миф или реальность. Бесплатный доступ к реферату
Искусственные мышцы: миф или реальность.doc
Зарегистрируйся в два клика и получи неограниченный доступ к материалам, а также
промокод
на новый заказ в Автор24. Это бесплатно.
Введение
Проблема создания искусственных тканей организма человека – весьма актуальная биотехнология, идея которой зародилась еще во второй половине ХХ века. Наравне с созданием искусственных органов, актуальность имеет проблема создания искусственных мышц. Искусственные мышцы, как предполагают ученые из различных стран, будут обладать повышенным уровнем прочности, эластичности, смогут выдерживать значительные нагрузки. Благодаря искусственным мышцам, человек приобретет силу, выносливость, сможет поднимать тяжести, превышающие его собственный вес. Перспективы создания искусственных мышц или «мускульной ткани», весьма велики. Мышечная ткань может быть использована для создания протезов, а в перспективе – для создания тканей роботов.
Пока что научные разработки в данной области не завершены, однако исследованы возможности создания искусственных мышц при помощи 3D печати. Есть и иные технологии, носящие в основном экспериментальный характер, позволяющие создать искусственные ткани, реагирующие на сигналы, поступающие от нерва благодаря нервно-мышечному соединению, которое выращено из клеток мышечной ткани и нейрональных клеток.
Эксперименты показывают, что созданные in vitro искусственные мышцы оказались способны к развитию, регенерации и смогли прижиться к телам животных.
В настоящее время ведутся разработки возможностей выращивания искусственных мышц и их распространение методом культивации, благодаря которому можно будет выращивать мышечную ткань в больших количествах. Но пока что все эти разработки носят экспериментальный характер. Неизвестно, как будут реагировать организмы людей на внедрение в них искусственных мышц, и каковы будут итоговые результаты.
Актуальность обращения к проблеме искусственных мышц обуславливается, с одной стороны, интенсивностью развития биотехнологий, с другой стороны, необходимостью разработки и внедрения в практику образцов искусственных тканей. Искусственные мышцы в перспективе способны будут излечить ряд заболеваний мышечной ткани глаз, сердца, желудка и т.д.
Искусственные мышцы в перспективе способны будут излечить ряд заболеваний мышечной ткани глаз, сердца, желудка и т.д.
Цель работы – рассмотреть содержание проблемы создания искусственных мышц.
Для достижения цели поставлены задачи:
1. Выявить назначение, возможности и свойства искусственных мышц,
2. Рассмотреть технологии изготовления искусственных мышц,
3. Проанализировать проблемы, связанные с разработкой и внедрением искусственных мышц.
Работа состоит из введения, трех частей, заключения, в которых анализируется рассматриваемая тема.
1. Назначение, возможности и свойства искусственных мышц
Искусственные мышцы представляют собой ткани органического и синтетического происхождения, способные заменить естественные мышцы.
Искусственные мышцы должны имитировать структуру и функции естественных мышц и быть чувствительны к нейрогуморальному воздействию со стороны организма реципиента.
В настоящее время в тканевой инженерии активно разрабатываются ряд основных технологических подходов для создания искусственных мышц. Это послойная тканевая инженерия, применение децеллюляризированных трансплантатов, создание искусственных мышц из грануляционной ткани, а также на основе трубчатых полимерных матриц.
Это послойная тканевая инженерия, применение децеллюляризированных трансплантатов, создание искусственных мышц из грануляционной ткани, а также на основе трубчатых полимерных матриц.
Искусственные мышц должны быть устойчивы к инфекциям, быть биосовместимыми с организмов реципиента, не иметь токсичности, не быть канцерогенными и имуногенными, обладать стабильность, быть герметичными образованиями, иметь идентичную природным мышцам текстуру, необходимую для быстрого и успешного приживления.
Фасции искусственных мышц не должны по своим характеристикам отличаться от биологических. Искусственные мышцы должны иметь биоме-ханические свойства: растяжимость, мощность, прочность на разрыв и при фиксации швами (наложенные швы не должны прорезываться), выдерживать физические нагрузки, не формировать перегибы, находясь в организме реципиента, обладать регенерирующей способностью
Зарегистрируйся, чтобы продолжить изучение работы
и получи доступ ко всей экосистеме Автор24
Введение
Проблема создания искусственных тканей организма человека – весьма актуальная биотехнология, идея которой зародилась еще во второй половине ХХ века. Наравне с созданием искусственных органов, актуальность имеет проблема создания искусственных мышц. Искусственные мышцы, как предполагают ученые из различных стран, будут обладать повышенным уровнем прочности, эластичности, смогут выдерживать значительные нагрузки. Благодаря искусственным мышцам, человек приобретет силу, выносливость, сможет поднимать тяжести, превышающие его собственный вес. Перспективы создания искусственных мышц или «мускульной ткани», весьма велики. Мышечная ткань может быть использована для создания протезов, а в перспективе – для создания тканей роботов.
Наравне с созданием искусственных органов, актуальность имеет проблема создания искусственных мышц. Искусственные мышцы, как предполагают ученые из различных стран, будут обладать повышенным уровнем прочности, эластичности, смогут выдерживать значительные нагрузки. Благодаря искусственным мышцам, человек приобретет силу, выносливость, сможет поднимать тяжести, превышающие его собственный вес. Перспективы создания искусственных мышц или «мускульной ткани», весьма велики. Мышечная ткань может быть использована для создания протезов, а в перспективе – для создания тканей роботов.
Пока что научные разработки в данной области не завершены, однако исследованы возможности создания искусственных мышц при помощи 3D печати. Есть и иные технологии, носящие в основном экспериментальный характер, позволяющие создать искусственные ткани, реагирующие на сигналы, поступающие от нерва благодаря нервно-мышечному соединению, которое выращено из клеток мышечной ткани и нейрональных клеток.
Эксперименты показывают, что созданные in vitro искусственные мышцы оказались способны к развитию, регенерации и смогли прижиться к телам животных.
В настоящее время ведутся разработки возможностей выращивания искусственных мышц и их распространение методом культивации, благодаря которому можно будет выращивать мышечную ткань в больших количествах. Но пока что все эти разработки носят экспериментальный характер. Неизвестно, как будут реагировать организмы людей на внедрение в них искусственных мышц, и каковы будут итоговые результаты.
Актуальность обращения к проблеме искусственных мышц обуславливается, с одной стороны, интенсивностью развития биотехнологий, с другой стороны, необходимостью разработки и внедрения в практику образцов искусственных тканей. Искусственные мышцы в перспективе способны будут излечить ряд заболеваний мышечной ткани глаз, сердца, желудка и т.д.
Цель работы – рассмотреть содержание проблемы создания искусственных мышц.
Для достижения цели поставлены задачи:
1. Выявить назначение, возможности и свойства искусственных мышц,
2. Рассмотреть технологии изготовления искусственных мышц,
3. Проанализировать проблемы, связанные с разработкой и внедрением искусственных мышц.
Проанализировать проблемы, связанные с разработкой и внедрением искусственных мышц.
Работа состоит из введения, трех частей, заключения, в которых анализируется рассматриваемая тема.
1. Назначение, возможности и свойства искусственных мышц
Искусственные мышцы представляют собой ткани органического и синтетического происхождения, способные заменить естественные мышцы.
Искусственные мышцы должны имитировать структуру и функции естественных мышц и быть чувствительны к нейрогуморальному воздействию со стороны организма реципиента.
В настоящее время в тканевой инженерии активно разрабатываются ряд основных технологических подходов для создания искусственных мышц. Это послойная тканевая инженерия, применение децеллюляризированных трансплантатов, создание искусственных мышц из грануляционной ткани, а также на основе трубчатых полимерных матриц.
Искусственные мышц должны быть устойчивы к инфекциям, быть биосовместимыми с организмов реципиента, не иметь токсичности, не быть канцерогенными и имуногенными, обладать стабильность, быть герметичными образованиями, иметь идентичную природным мышцам текстуру, необходимую для быстрого и успешного приживления.
Фасции искусственных мышц не должны по своим характеристикам отличаться от биологических. Искусственные мышцы должны иметь биоме-ханические свойства: растяжимость, мощность, прочность на разрыв и при фиксации швами (наложенные швы не должны прорезываться), выдерживать физические нагрузки, не формировать перегибы, находясь в организме реципиента, обладать регенерирующей способностью
.
В идеале искусственные мышцы должны на 90 и более процентов копировать настоящие. При этом изготовление искусственных мышц должно быть экономически выгодным, целесообразным, недолгим. При этом в любой момент подвергнуться коррекции и видоизменению. Искусственные мышцы необходимы не только для поврежденных в результате травм или болезней мышц людей или животных. Эксперты надеются, что уже в ближайшем будущем создание искусственных мышц можно будет использовать не только для восстановления повреждения мышечной ткани человека, но и для поддержки деградирующей мускулатуры пожилых и больных лиц.
Определенные успехи в данном направлении уже имеются. К примеру, компания «3D Биопринтинг Солюшенс» уже успешно разрабатывает проекты по созданию искусственных органов и тканей, в частности, мышц, при помощи технологии 3D-биопринтинга. На подопытных животных были испробованы новые технологии. В более, чем половине случаев они оказались удачны. Но сколько проживут животные с новыми имплантантами, пока не известно. Результаты работы исследователи осветили на различных научных конференциях и симпозиумах. Пока что нельзя утверждать, что искусственные мышцы являются полноценным, исправно функционирующим продуктом биотехнологии. Есть сложности с их использованием и проблемные моменты, над устранением которых работают ученые.
2. Технологии изготовления искусственных мышц
Существуют апробации нескольких технологий изготовления искусственных мышц. Весьма популярна и актуальна технология 3D-биопринтинга для изготовления биологических конструкций. Технология основана на размещении клеток на биосовместимой основе. При этом используется особый метод генерации трехмерных структур биологических тканей. Технологии 3D-биопринтинга, в частности, продемонстрировали возможность создания искусственных мышц. Клетки тканей при этом обеспечили стабильность и жизнестойкость к многочисленным воздействиям. При создании искусственных мышц в 3D-биопринтинге использовались такие методы, как: магнитный биопринтинг, фотолитография, стереолитография, и прямая экструзия клеток. Изготовленный на принтере клеточный материал отправляется в специальную лабораторию, где он подлежит выращиванию.
При этом используется особый метод генерации трехмерных структур биологических тканей. Технологии 3D-биопринтинга, в частности, продемонстрировали возможность создания искусственных мышц. Клетки тканей при этом обеспечили стабильность и жизнестойкость к многочисленным воздействиям. При создании искусственных мышц в 3D-биопринтинге использовались такие методы, как: магнитный биопринтинг, фотолитография, стереолитография, и прямая экструзия клеток. Изготовленный на принтере клеточный материал отправляется в специальную лабораторию, где он подлежит выращиванию.
Изготовленные на биопринтере искусственные мышцы уже сегодня в экспериментальном порядке могут быть пригодны в хирургии и трансплантологии.
Другая технология предполагает культивацию тканей на основе процесса децеллюляризации. При этом речь идет об искусственно выращенных мышцах из донорских клеток человека или животного. При этом мышцы должны обладать механическими свойствами, что было подтверждено в опытах in vitro. Ученые считают, что в перспективе есть возможность использования технологии децеллюляризации без предварительного заселения графтов донорскими клетками.
В лабораториях США и ряда стране Европы является технология с использованием биодеградируемых полимерных матриц. Для изготовления мышечной ткани сначала делают полимерный каркас с заданными свойствами. Далее, воздействуя на клетки химическими стимуляторами (факторами роста, цитокинами и др.), а также при воздействии тока и растяжения мышечная ткань подвергается дифференцировке. Затем происходит адаптация полученной ткани к организму реципиента. В итоге каркас заменяется внеклеточным матриксом, который синтезируют клетки. В результате можно получить выращенную мышцу. В процессе данной технологии принципиальное значение имеют среда для развития тканей, которая благоприятствует росту и внедрению клеток, совместимость с клетками реципиента
Магазин работ
Посмотреть все
Эссе
Антибиотикорезистентность: миф или реальность
200 ₽
Реферат
Создание искусственного интеллекта: мифы и реальность
270 ₽
Реферат
Путешествие в реальность мифа
340 ₽
Посмотреть все
Не нашел ответ на свой вопрос?
Опиши, с чем тебе нужна помощь. Эксперты Автор24 бесплатно ответят тебе в течение часа
Эксперты Автор24 бесплатно ответят тебе в течение часа
Выбери предметАвиационная и ракетно-космическая техникаАвтоматизация технологических процессовАвтоматика и управлениеАгрохимия и агропочвоведениеАктерское мастерствоАнализ хозяйственной деятельностиАнглийский языкАнтикризисное управлениеАрхеологияАрхитектура и строительствоАстрономияБазы данныхБанковское делоБезопасность жизнедеятельностиБиблиотечно-информационная деятельностьБизнес-планированиеБиологияБиотехнологияБухгалтерский учет и аудитВетеринарияВнешнеэкономическая деятельностьВодные биоресурсы и аквакультураВоенное делоВоспроизводство и переработка лесных ресурсовВысшая математикаГеографияГеодезияГеологияГеометрияГидравликаГидрометеорологияГостиничное делоГосударственное и муниципальное управлениеДеловой этикетДеньгиДетали машинДизайнДокументоведение и архивоведениеЕстествознаниеЖелезнодорожный транспортЖурналистикаЗемлеустройство и кадастрИздательское делоИнвестицииИнженерные сети и оборудованиеИнновационный менеджментИнформатикаИнформационная безопасностьИнформационные технологииИскусствоИсторияКартография и геоинформатикаКитайский языкКонфликтологияКраеведениеКредитКриминалистикаКулинарияКультурологияЛитератураЛогикаЛогистикаМаркетингМатериаловедениеМашиностроениеМедицинаМеждународные отношенияМеждународные рынкиМенеджментМенеджмент организацииМеталлургияМетрологияМеханикаМикро-, макроэкономикаМикропроцессорная техникаМорская техникаМузыкаНалогиНаноинженерияНачертательная геометрияНемецкий языкНефтегазовое делоОрганизационное развитиеПарикмахерское искусствоПедагогикаПожарная безопасностьПолиграфияПолитологияПочвоведениеПраво и юриспруденцияПриборостроение и оптотехникаПриродообустройство и водопользованиеПрограммированиеПроизводственный маркетинг и менеджментПромышленный маркетинг и менеджментПроцессы и аппаратыПсихологияРабота на компьютереРадиофизикаРежиссураРеклама и PRРелигияРусский языкРынок ценных бумагСадоводствоСварка и сварочное производствоСвязи с общественностьюСельское и рыбное хозяйствоСервисСопротивление материаловСоциальная работаСоциологияСтандартизацияСтатистикаСтрановедениеСтратегический менеджментСтрахованиеТаможенное делоТеатроведениеТекстильная промышленностьТелевидениеТеоретическая механикаТеория вероятностейТеория игрТеория машин и механизмовТеория управленияТеплоэнергетика и теплотехникаТехнологические машины и оборудованиеТехнология продовольственных продуктов и товаровТовароведениеТорговое делоТранспортные средстваТуризмУправление качествомУправление персоналомУправление проектамиФармацияФизикаФизическая культураФилософияФинансовый менеджментФинансыФранцузский языкХимияХирургияХолодильная техникаЦенообразование и оценка бизнесаЧертежиЧерчениеЭкологияЭконометрикаЭкономикаЭкономика предприятияЭкономика трудаЭкономическая теорияЭкономический анализЭлектроника, электротехника, радиотехникаЭнергетическое машиностроениеЭтикаЯдерная энергетика и теплофизикаЯдерные физика и технологииЯзыки (переводы)Языкознание и филологияEVIEWSSPSSSTATAДругое
Прикрепить файл
Твой вопрос отправлен
Скоро мы пришлем ответ экпертов Автор24 тебе на почту
Помощь эксперта
Нужна помощь по теме или написание схожей работы?
Свяжись напрямую с автором и обсуди заказ.
5
xeni
Медицина
2664 заказа
Отправить письмо схожим авторам, которые сейчас на сайте
Регистрация прошла успешно!
Теперь вам доступен полный фрагмент работы, а также
открыт доступ ко всем сервисам
экосистемы
Скачивание началось
В файле вы найдете полный фрагмент работы доступный на сайте, а также
промокод referat200
на новый заказ в Автор24.
Введи почту
Зарегистрируйся через почту и получи неограниченный доступ к материалам. Это бесплатно.
Читать тексты на сайте можно без ограничений. Однако для копирования и использования работ нужно
зарегистрироваться в экосистеме Автор24.
Это бесплатно.
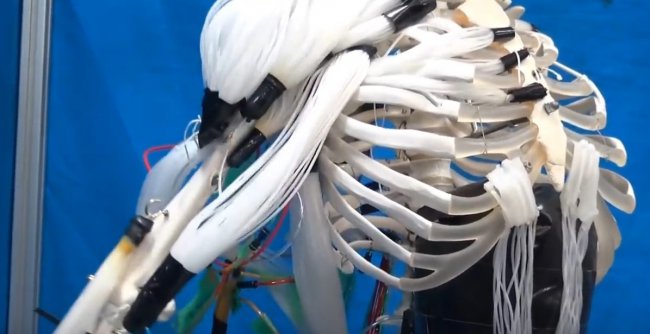
Амурский ученый изготовил искусственные мышцы из рыболовной лески и медной проволоки — Амурская правда
Общество
Искусственные мышцы из рыболовной лески и медной проволоки — в это трудно поверить, но это возможно. Воодушевившись разработками американских коллег из Далласа, амурский ученый — популяризатор робототехники — Александр Семочкин изготовил искусственные мышцы из копеечных подручных материалов. Для их производства ученый придумал и собственноручно собрал специальную машину — скручиватель искусственных мышц. Свое изобретение он продемонстрировал на научной конференции, прошедшей в августе в США, чем произвел впечатление на ученое сообщество, увлеченное робототехникой и автоматизацией.
Американские технологии с русским акцентом
О том, что из нейлона можно делать искусственные мышцы, руководитель лаборатории информационных технологий БГПУ Александр Семочкин узнал два года назад. Тогда ему на глаза попалась статья в журнале Science группы ученых из Далласа, которые сумели сделать мышцы из нейлоновых волокон, покрытых серебром.
Тогда ему на глаза попалась статья в журнале Science группы ученых из Далласа, которые сумели сделать мышцы из нейлоновых волокон, покрытых серебром.
— В это трудно было поверить! Люди давно бьются над простым механизмом, который мог бы двигать предметы. Сейчас роботы в основном стоятся на сервоприводах, электрических моторах, на пневмо- или гидроприводах, но они все требуют каких-то дополнительных систем. Например, для пневмопривода нужен мощный компрессор, который будет качать воздух. Технически это сложные устройства, но на них сейчас делают роботов, и при этом очень эффективно. Это доступно, но дорого. А эти ребята из Далласа говорят, что можно из дешевой рыболовной лески делать мышцы! — рассказывает Александр Николаевич.
Любитель роботов из Благовещенска после этой публикации еще год ждал новой статьи в научном журнале: вдруг эти мышцы уже стали массово выпускать и продавать. «Ведь тогда мы сможем начать делать роботов на других принципах — не на моторах, а на таких мышцах. Это же круто! Они будут более человечные», — говорит ученый из БГПУ.
Это же круто! Они будут более человечные», — говорит ученый из БГПУ.
Скручиватель искусственных мышц, изобретенный Александром Семочкиным и напечатанный на 3D-принтере
Поняв, что продолжения не будет, он решил сделать искусственные мышцы самостоятельно. Вместе с коллегами из педуниверситета вручную по далласской технологии они скрутили несколько мышц. Только вместо нейлоновых волокон с серебром взяли простую рыболовную леску и медную проволоку. Однако первые изделия оказались нежизнеспособны.
Эти опыты амурские робототехники едва не забросили. Но случай снова заставил Александра Семочкина поверить в искусственные мышцы. В прошлом году он попал на конференцию по робототехнике в «Сколкове», где познакомился с руководителем фирмы «Нейроботикс» из Зеленограда. Как оказалось, изобретатели из Подмосковья тоже делают мышцы из лески и они работают.
«Правда, эта технология очень сырая, пока непригодная для создания мышц. Но вспомните Фарадея! Когда он сделал свой первый электромотор, у него проволочка крутилась в луже ртути, — это тоже все было слабо и бесперспективно. А сейчас посмотрите: уже ездят беспилотные автомобили на таких двигателях. Мне кажется, что у таких мышц есть перспективы, — уверен Александр Семочкин. — Я приехал воодушевленный из «Сколкова». И где-то за месяц-полтора сделал прибор для скручивания мышц. Прибор позволяет получать повторяемый результат, чтобы мышцы были одинаковыми. Это важно для их изучения».
А сейчас посмотрите: уже ездят беспилотные автомобили на таких двигателях. Мне кажется, что у таких мышц есть перспективы, — уверен Александр Семочкин. — Я приехал воодушевленный из «Сколкова». И где-то за месяц-полтора сделал прибор для скручивания мышц. Прибор позволяет получать повторяемый результат, чтобы мышцы были одинаковыми. Это важно для их изучения».
Как это работает
Для создания искусственной мышцы длиной примерно 5 сантиметров нужно сантиметров 20 лески и несколько метров медной проволоки. Около 10 минут прибор, изобретенный Александром Семочкиным и напечатанный на 3D-принтере, равномерно наматывает проволоку вокруг лески. Затем еще несколько минут машинка туго скручивает леску. Через какое-то время она начинает сворачиваться в спираль. Последний штрих — получившуюся мышцу помещают на 30 минут в печь, которая постепенно нагревается до 180 градусов.
Искусственные мышцы перед заключительным этапом – отправкой в печь
— Основная идея в том, что мы используем самые дешевые компоненты. И из них можно получить результат не хуже, чем из нейлона с серебром. Мне кажется, что наши должны быть долговечнее. По крайней мере, в моих экспериментах они долго работают. Пока я, конечно, целенаправленно не испытывал, сколько циклов они могут выдержать. Не входило пока в планы, — признается изобретатель.
И из них можно получить результат не хуже, чем из нейлона с серебром. Мне кажется, что наши должны быть долговечнее. По крайней мере, в моих экспериментах они долго работают. Пока я, конечно, целенаправленно не испытывал, сколько циклов они могут выдержать. Не входило пока в планы, — признается изобретатель.
В действие искусственные мышцы приводятся электрическим током. Источник подсоединяется к медной проволоке. Под небольшим напряжением медь нагревается и равномерно передает тепло нейлоновой леске. В зависимости от вида мышцы — а скручиватель способен выполнять три их разных вида — сокращаются или растягиваются.
Маленькие мышцы можно соединять последовательно — они будут длиннее и, соответственно, сокращаться на большее расстояние, а можно соединять параллельно — в этом случае мышца станет сильнее. Две тонкие мышцы, соединенные параллельно, могут поднять килограмм на несколько миллиметров.
Две тонкие мышцы, соединенные параллельно, могут поднять килограмм на несколько миллиметров.
Сейчас ученые бьются над тем, как быстро заставить мышцы возвращаться в исходное положение. Для этого проволоку необходимо охладить. Пока что самый продуктивный способ — делать это водой. В ближайшее время Александр Семочкин с коллегами продолжат работу над мышцами. Когда они сумеют заставить их работать быстро, первым обладателем искусственных мышц станет университетский антропоморфный робот Искандерус.
От роботов до медицины
— На конференции, которая прошла в августе в Техасе, я показывал именно этот прибор — скручиватель искусственных мышц. Моя цель — привлечь внимание людей к тому, что такие мышцы можно делать и у них есть перспектива, — признается Александр Семочкин.
Он планирует написать статью с подробным описанием, как самостоятельно изготовить прибор, и опубликовать ее на специализированной интернет-площадке в открытом доступе. Сейчас же Александр Николаевич делится своими разработками на канале YouTube, демонстрируя работу мышц.
Чем больше людей будет знать об искусственных мышцах, чем больше людей займется их изучением, тем больше идей появится, как их можно использовать.
— Самый интересный способ — использовать в создании человекоподобных и подобных животным роботов. Но можно и в банальных случаях. Например, я пытаюсь сделать клапан: вода течет, подается напряжение, мышца сокращается, клапан открывается и вода выливается. Выключили ток, клапан закрылся.
Искусственные мышцы уже применили в медицине — сделали манипулятор для хирургов, выполняющих лапаро- и эндоскопические операции. Кроме того, изобретение опробовали в лаборатории Disney — здесь собрали руку.
Возрастная категория материалов: 18+
Материалы по теме
В Благовещенске впервые прошел конкурс робототехники для школьников «Движение смелых»Амурские и питерские школьники будут собирать роботов на межрегиональном хакатоне«Танковый робобиатлон» среди сделанных школьниками роботов проведет центр «IT-Куб»Бой роботов-сумоистов: в Амгу прошли межрегиональные соревнования по робототехнике12-летний благовещенец сконструировал робота с батарейкой из лимонаБлаговещенские школьники собрали квадрокоптер для мониторинга паводков и датчик контроля за мусоромСтудент АмГУ получил патент на изобретение для тестирования космических спутниковБлаговещенская школьница научила тамагочи складывать и вычитать цифрыАмурские школьники отправили в небо 45 собственных ракетШкольники устроят битву роботов в Благовещенске: среди сотни участников две девочкиБлаговещенский «IT-куб» набирает юных любителей роботехники на бесплатный курс
Искусственные мышцы восстановят способность моргать
ГлавнаяГлазная клиника в МосквеО клиникеНовости офтальмологииИскусственные мышцы восстановят способность моргать
14 Февраля, 2014
Искусственные мышцы восстановят способность моргать
Хирурги из UC Davis и инженеры компании SRI International в Пало-Альто, из штата Калифорния изобрели искусственные мышцы, которые помогут восстановить способность моргать. Данное изобретение поможет справиться с множеством проблем пациентам с параличом лицевого нерва.
В веко имплантируются электроактивные полимеры, которые помогают парализованному веку двигаться.
В дальнейшем, подобная технология планируется использоваться и для реабилитации и остальных парализованных мышц . Если для лица- проблем быть не должно, то для остальных мышц требуется электрический импульс гораздо большей силы.
Если для лица- проблем быть не должно, то для остальных мышц требуется электрический импульс гораздо большей силы.
Неспособность человека моргать может привести за собой огромные проблемы, ведь во время акта моргания глаз увлажняется, очищается. Отсутствие моргания может привести к пересыханию роговицы, в следствии чего на ней будут развиваться бактерии, что приведет к изъязвлению роговицы. По мимо всего паралич века- достаточно большая косметическая проблема.
Данное изобретение должно получить популярность и доступность для пациентов в ближайшие 3-5 лет. На данном этапе проводятся исследования.
Возврат к списку
⨉
Уважаемые посетители! Информируем вас о том, что этот сайт собирает метаданные пользователя (cookie-файлы) с целью повышения качества обслуживания пользователей сайта. Продолжая использовать наш сайт без изменения настроек, вы соглашаетесь на использование cookie-файлов.
Запись на прием
При записи на приём через сайт дополнительная скидка 5%
После заполнения заявки с вами свяжется администратор для уточнения деталей.
Услуга:
Выберите услугуДиагностика зренияЛечение катарактыЛазерная коррекция зренияЛечение глаукомыАстигматизмЛечение близорукостиЛечение дальнозоркостиКератоконусСетчатка. Лазеркоагуляция. Лечение сетчаткиЛечение косоглазияДетская офтальмологияКонтактная коррекция зренияЛечение других заболеваний глазОперации на глазаВитреоретинальная хирургия
Дата и время:
Ваше имя:
Телефон:(обязательное поле)
Комментарий:
Согласен с условиями обработки и использования моих данных
Заявка отправлена
В ближайшее время с вами свяжется специалист для согласования времени приёма.
Запись на прием
При записи на приём через сайт дополнительная скидка 5%
После заполнения заявки с вами свяжется администратор для уточнения деталей.
Специалист:
Дата и время:
Ваше имя:
Телефон:(обязательное поле)
Комментарий:
Согласен с условиями обработки и использования моих данных
Заявка отправлена
В ближайшее время с вами свяжется специалист.
Задать вопрос специалисту
Оставьте свой e-mail и мы ответим на любой
интересующий Вас вопрос в течение дня (в рабочее время).
Специалист:
Ваше имя:
E-mail:(обязательное поле)
Телефон:
Вопрос:(обязательное поле)
Согласен с условиями обработки и использования моих данных
Заявка отправлена
В ближайшее время на указанный Вами e-mail будет отправлен ответ.
Задать вопрос специалисту
Оставьте свой e-mail и мы ответим на любой
интересующий Вас вопрос в течение дня (в рабочее время).
Ваше имя:
E-mail:(обязательное поле)
Вопрос:(обязательное поле)
Согласен с условиями обработки и использования моих данных
Заявка отправлена
В ближайшее время на указанный Вами e-mail будет отправлен ответ.
Заказать бесплатный звонок
Оставьте свой номер телефона и мы бесплатно перезвоним Вам
в течение 30 секунд (в рабочее время).
Ваше имя:
Телефон*(обязательное поле)
Согласен с условиями обработки и использования моих данных
Заявка отправлена
В ближайшее время Вам перезвонят
Оставить отзыв
Ваше имя *
Ваша почта *
Ваш телефон
Текст отзыва *
Прикрепить фотографию
Файл не выбран
Согласен с условиями обработки и использования моих данных
Отзыв отправлен
Он будет опубликован на сайте после проверки модератором
Искусственная мышца | Хакадей
28 октября 2021 г. , Райан Флауэрс
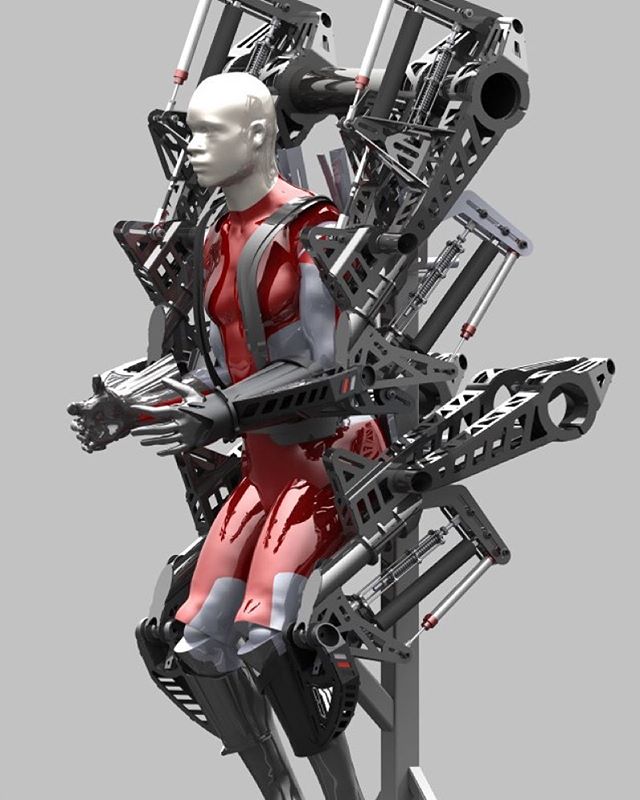
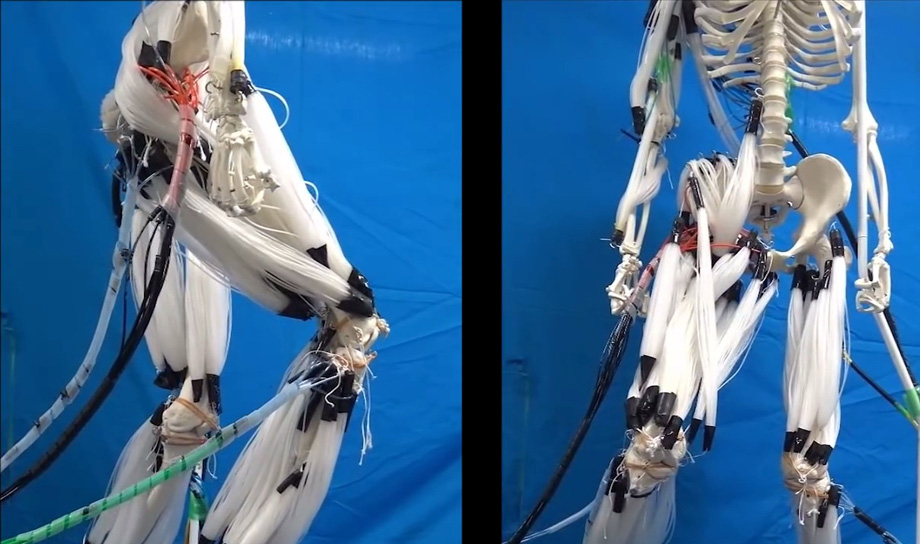
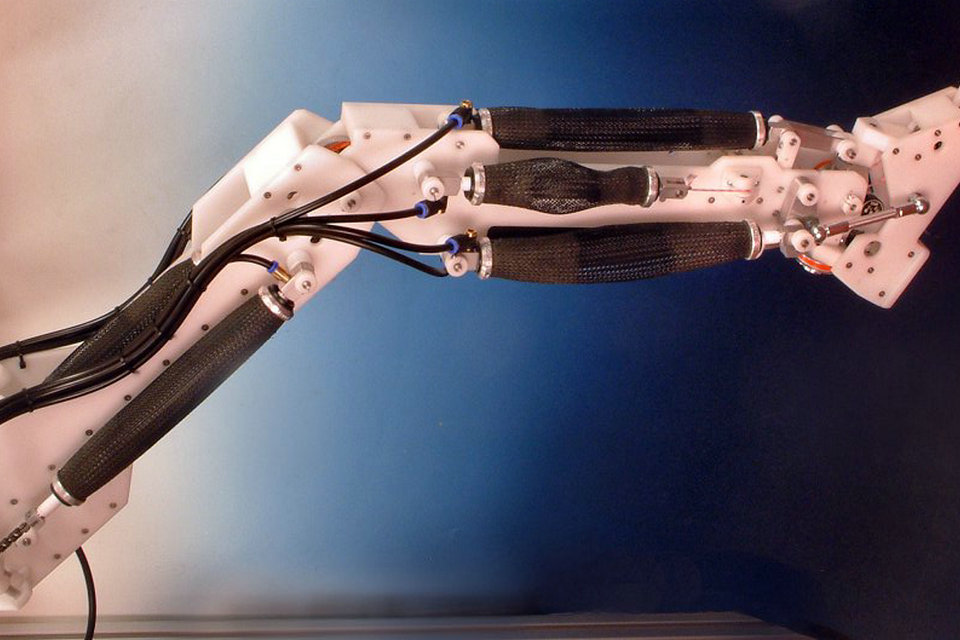
Википедия говорит: «Гипотеза зловещей долины предсказывает, что сущность, выглядящая почти как человек, рискует вызвать у зрителей холодные, жуткие чувства». И да, мы должны признать, что каким бы невероятным это ни было, видеть, как рука и предплечье [Automaton Robotics] двигаются почти по-человечески, немного тревожно. Не верьте нам на слово, позвольте себе быть очарованным и сбитым с толку видео под перерывом.
Хотя создатели робо-манипулятора с искусственными мышцами довольно умалчивают о том, как он работает, просмотр канала [Automaton Robotics] на YouTube проливает некоторый свет на этот вопрос. Движение рук и кистей стало возможным благодаря искусственным мышцам, которые сами оживляются водой под давлением 130 фунтов на квадратный дюйм (9 бар). Сами мышцы представляют собой водонепроницаемое переплетение волокон, но эти подробности не приводятся. Пузыри внутри гибкой стальной сетки, как ловушки для пальцев?
9Цель 0002 [Automaton Robotics] состоит в том, чтобы в конечном итоге создать робота-гуманоида, используя их технологию искусственных мышц. Показанная демонстрация очень впечатляет, поскольку рука способна поднять гантель весом 7 кг (15,6 фунта), хотя некоторые из ее самых сильных искусственных мышц еще не установлены.
Показанная демонстрация очень впечатляет, поскольку рука способна поднять гантель весом 7 кг (15,6 фунта), хотя некоторые из ее самых сильных искусственных мышц еще не установлены.
Несколько лет назад мы публиковали статью об искусственных мышцах, в которой упоминались пневматические искусственные мышцы, сокращающиеся при приложении давления воздуха, и кажется, что [Automaton Robotics] вместо этого использовала тот же метод с водой. о чем ты думаешь? Пожалуйста, дайте нам знать в комментариях ниже. Также спасибо [The Kilted Swede] за отличный совет! Обязательно присылайте и свои советы!
Продолжить чтение «Прогулка по зловещей долине с роботизированной рукой с искусственными мышцами» →
Posted in Robots HacksTagged искусственная мышца, гидравлика, рука робота, сверхъестественная долина, давление воды
21 октября 2020 г., Левин Дэй
Идея создания костюма, увеличивающего силу владельца, очень привлекательна и часто упоминается в научной фантастике. Есть несколько реальных примеров, и теперь [Алекс] может добавить свой в список. Однако сборка имеет изюминку, полагаясь на водород для выполнения работы.
Есть несколько реальных примеров, и теперь [Алекс] может добавить свой в список. Однако сборка имеет изюминку, полагаясь на водород для выполнения работы.
По своей сути конструкция ничем не отличается от других проектов с искусственными мышцами. Мышцы в телосложении [Алекса] состоят из резиновой трубки внутри нейлоновой оплетки. Когда резиновая трубка надувается, она расширяется, в результате чего нейлоновая оплетка укорачивается по мере расширения. Обычно в таких конструкциях для питания мышц используется сжатый воздух, однако [Алекс] пошел другим путем. Вместо этого вода подвергается электролизу в камере, похожей на дуговой реактор Железного человека, а образующиеся в результате газы используются для приведения в движение мышц. С пятью мышцами, сгруппированными, чтобы тянуть вместе, носимый подлокотник способен генерировать тяговое усилие до 15 кг.
Этот дизайн имеет несколько преимуществ; электролизер не имеет движущихся частей, он намного проще и тише обычного воздушного компрессора.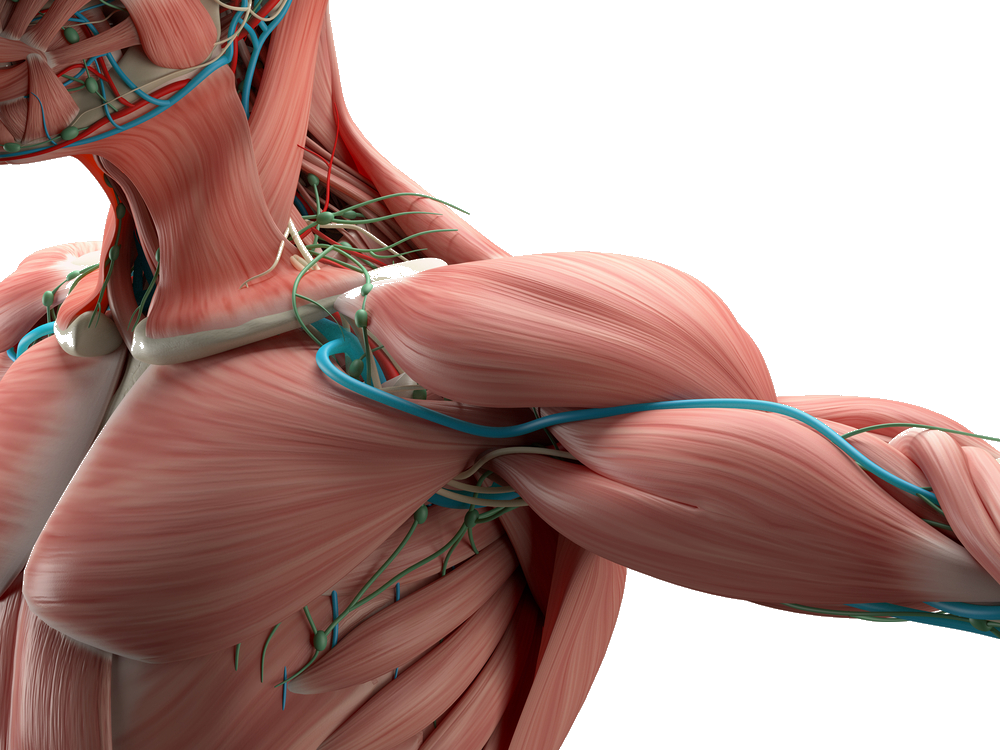 Очевидно, что существует риск возгорания из-за используемых легковоспламеняющихся газов, но [Алекс] объясняет меры предосторожности, принятые для минимизации этого риска, в видео.
Очевидно, что существует риск возгорания из-за используемых легковоспламеняющихся газов, но [Алекс] объясняет меры предосторожности, принятые для минимизации этого риска, в видео.
Экзокостюмы, возможно, еще не стали мейнстримом, но это не значит, что люди не работают над тем, чтобы сделать их реальностью. Мы уже показывали некоторые из них, например, этот дизайн с открытым исходным кодом. Видео после перерыва.
Продолжить чтение «Мышцы экзоскелета, работающие на водороде» →
Posted in Robots HacksTagged искусственная мышца, экзоскелет, железный человек, мышца
11 июля 2018 г., Дональд Папп
Знаете ли вы, что при определенных условиях нейлон можно использовать в качестве искусственной мышцы? Мы, конечно, не знали, пока не наткнулись [Брэндона Т. Вуда] на премию Hackaday Prize 2018 Material Linear-Actuator for Robotics.
Когда [Брэндон] впервые узнал о нейлоновых линейных материальных приводах (NLMA), он решил найти воспроизводимый и практичный метод их изготовления и экспериментов с ними. Вот как это работает: гипернамотанные катушки нейлона при нагревании будут сокращаться по длине и расширяться по ширине. При остывании они возвращаются к своей первоначальной форме.
Вот как это работает: гипернамотанные катушки нейлона при нагревании будут сокращаться по длине и расширяться по ширине. При остывании они возвращаются к своей первоначальной форме.
[Брэндон] был занят в основном важной, но не очень яркой работой: поиском доступных методов надежного создания нитей искусственных нейлоновых мышц дешево и надежно. В его нынешнем методе используется приспособление для намотки нейлоновой лески до тех пор, пока она туго не намотается на себя, а затем накручивается отрезок нихромовой проволоки вокруг внешней стороны, чтобы действовать как нагреватель. Используя этот метод, катушки могут управляться электрически. [Брэндон] в настоящее время экспериментирует с созданием связок из отдельных нейлоновых спиралей, чтобы они действовали вместе как одна большая мышца, потому что, хотя одна проволока не особенно прочная, с пучком может быть совсем другая история. Это определенно необычно и проделывает большую работу, чтобы превратить известное явление во что-то, что можно взломать, что делает его приятным для участия в премии Hackaday в этом году.
Posted in Премия HackadayTagged Премия Hackaday 2018, искусственная мышца, мышечная проволока, нихром, NLMA, Нейлоновый линейный материал, нейлоновая мышца, робототехника
16 мая 2018 г. Брайан МакЭвой
Неудивительно, что электрические угри имеют плохую репутацию за то, что они страшные существа. Это скользкие мясистые водяные змеи, которые могут призывать молнии. Биологи и инженеры из Калифорнийского университета имели в виду нечто иное, когда создавали своего электрического угря. Вместо того, чтобы охотиться на рыбу, этот безобидно плавает рядом с ними.
Традиционные дистанционно управляемые транспортные средства полагались на твердые корпуса и вращающиеся пропеллеры. Для морских обитателей это шумно и неестественно. Молчаливый пловец не поднимает бровей, не то чтобы у рыб были брови. Самой инновационной особенностью являются искусственные мышцы, и, хотя подробностей мало, они, кажется, используют среду внутри для проведения заряда, а снаружи среда соленой воды проводит противоположный заряд, что вызывает сокращение мембраны между внутрь и наружу. Некоторое плавание можно увидеть ниже разрыва, и, возможно, один из наших проницательных читателей сможет пролить свет на список материалов этого подводного авантюриста.
Некоторое плавание можно увидеть ниже разрыва, и, возможно, один из наших проницательных читателей сможет пролить свет на список материалов этого подводного авантюриста.
Одна из наших любимых подводных лодок — лауреат премии Hackaday 2017 года, подводный планер с открытым исходным кодом. Для более художественной интерпретации подводных аппаратов Curv II является одним из самых элегантных, которые мы когда-либо видели.
Читать далее «Нежный электрический угорь» →
Posted in Robots HacksTagged искусственная мускулатура, биология, угорь, морской, робототехника, подводная лодка, плавать, под водой
7 сентября 2016 г. Стивен Дюфресн
Возможно, наши будущие повелители не будут состоять из электрических цепей, а будут мягкотелыми, как и мы сами. Однако их конструкция будет заимствована из электрических аналогов, таких как Octobot.
Octobot — детище группы исследователей из Гарвардского университета, которая недавно опубликовала статью о нем в журнале Nature. Его тело смоделировано по образцу осьминога и состоит из всех мягких частей тела, которые были созданы с использованием комбинации 3D-печати, литья и мягкой литографии. Два набора рук по обе стороны от Октобота двигаются по очереди под управлением схемы мягкого осциллятора. Вы можете увидеть его в действии на видео ниже.
Его тело смоделировано по образцу осьминога и состоит из всех мягких частей тела, которые были созданы с использованием комбинации 3D-печати, литья и мягкой литографии. Два набора рук по обе стороны от Октобота двигаются по очереди под управлением схемы мягкого осциллятора. Вы можете увидеть его в действии на видео ниже.
Читать далее «Мягкий робот с микрожидкостной логической схемой» →
Posted in Robots HacksTagged искусственная мышца, автономный робот, биохакинг, перекись водорода, микрожидкость, осьминог, осциллятор, кислород, роботизированный осьминог, плавание
6 июня 2016 г. Мориц Вальтер
Индивидуальные роботизированные протезы набирают популярность. В многочисленных проектах хакеры и производители приняли вызов. От Enabling The Future, Open Hand Project, OpenBionics до бесчисленных проектов протезов на Hackaday.io. Тем не менее, мехатроника, которая приводит в действие большинство из них, все еще из прошлого века.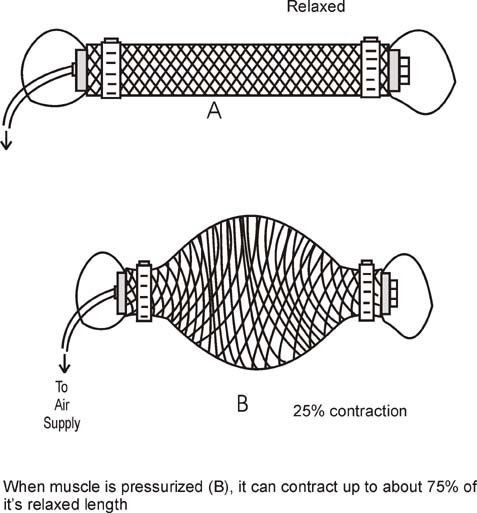 В конце концов, в пластиковую руку можно втиснуть не так много миниатюрных моторов и шестеренок, а на руку или ногу можно поместить только такое количество гидравлики, прежде чем она станет медленным тяжелым кирпичом – больше мешает, чем помогает. Если бы только у нас было несколько дополнительных этих легких, быстрых и мощных приводов, которые помогают нам прожить весь день. Если бы у нас были искусственные мышцы.
В конце концов, в пластиковую руку можно втиснуть не так много миниатюрных моторов и шестеренок, а на руку или ногу можно поместить только такое количество гидравлики, прежде чем она станет медленным тяжелым кирпичом – больше мешает, чем помогает. Если бы только у нас было несколько дополнительных этих легких, быстрых и мощных приводов, которые помогают нам прожить весь день. Если бы у нас были искусственные мышцы.
Продолжить чтение «Искусственные мышцы для облегчения роботизированного напряжения» →
Рубрика: Куратор, Колонки Hackaday, Медицинские хаки, Оригинальное искусство, Взломы роботовпомеченный искусственная мышца, электроактивные полимеры, мышцы, пневматические мышцы, роботизированный протез, робототехника, термически активируемые мышцы
16 сентября 2015 г. Брайан Бенчофф
Для того, чтобы [Ллойд Т Кэннон III] стал участником Hackaday Prize, он сделал не что иное, как изменение способа движения всего. Последние 100 лет двигатели внутреннего сгорания приводили в движение самолеты, поезда и автомобили, и только недавно люди начали интересоваться батареями и электродвигателями. Со своими суперконденсаторами и искусственными мышцами [Ллойд] на несколько десятилетий опережает всех остальных.
Последние 100 лет двигатели внутреннего сгорания приводили в движение самолеты, поезда и автомобили, и только недавно люди начали интересоваться батареями и электродвигателями. Со своими суперконденсаторами и искусственными мышцами [Ллойд] на несколько десятилетий опережает всех остальных.
Проект [Ллойда] состоит из двух частей, первой из которых является устройство хранения энергии. Он строит гибридную литий-серно-кремниевую батарею. Аккумуляторы Li-S-Si обещают обеспечить до 2000 ватт-часов на килограмм батареи. Для сравнения, даже передовые литиевые батареи потребляют около 2-300 Втч/кг. Это разница почти на порядок, и, хотя это далеко от ископаемого топлива, это значительно увеличило бы диапазон электромобилей и сделало бы возможными многие другие технологии.
Другая часть проекта [Ллойда] — искусственные мышцы. Двигатели не очень эффективны, а электродвигатели хороши только в том случае, если вы хотите что-то крутить. Для робототехники нужны мышцы, и [Ллойд] строит их из лески. Эти мышцы сокращаются из-за резистивного нагрева нити из углеродного волокна, встроенной в мышцу. Это делалось и раньше, но это первый проект, который мы видели, который воспроизводит технику в гаражной лаборатории.
Эти мышцы сокращаются из-за резистивного нагрева нити из углеродного волокна, встроенной в мышцу. Это делалось и раньше, но это первый проект, который мы видели, который воспроизводит технику в гаражной лаборатории.
Обе части проекта [Ллойда] сами по себе достойны участия в Hackaday Prize, но объединение их в один проект более чем соответствует цели: создать что-то важное.
Спонсором Hackaday Prize 2015 является:
Posted in Robots Hacks, The Hackaday PrizeTagged Hackaday Prize 2015, искусственная мышца, батарея, Hackaday Prize, LiSSi, мышца, суперконденсатор, приз Hackaday
Hannover Messe: искусственные мышцы помогают роботу
image: Роботизированный захват, разработанный Стефаном Зелеке и его командой, может захватывать объекты сложной геометрии и может адаптироваться к изменениям формы, плавно переключаясь между частями различной формы. Пол Моцки (слева) и Лукас Циммер (справа) помогали разрабатывать систему.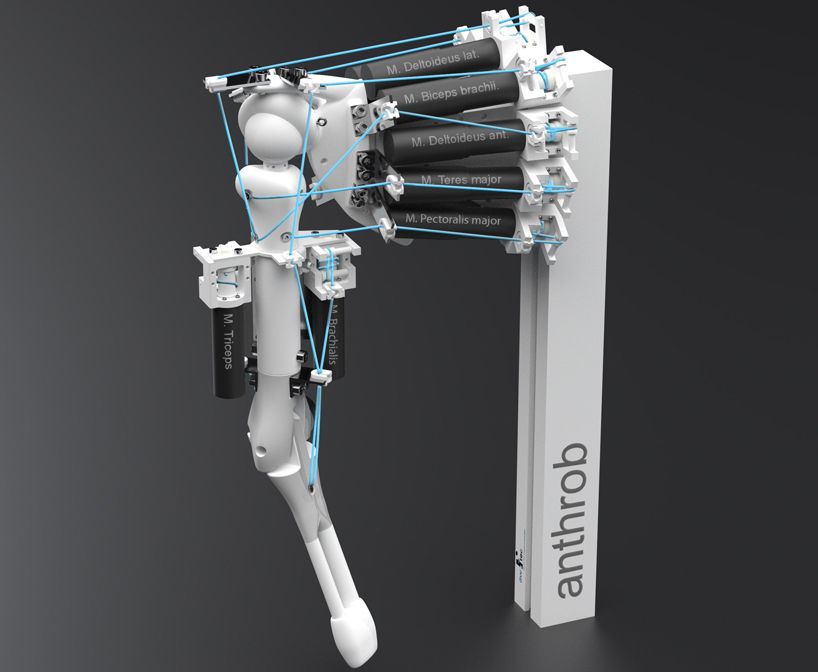
посмотреть больше
Кредит: Кредит: Оливер Дитце
Роботизированные захваты, разработанные профессором Стефаном Зеелеке и его командой из Саарского университета, могут захватывать и манипулировать объектами сложной геометрии. Система может почти мгновенно адаптироваться к изменениям формы, плавно переключаясь между частями различной формы. Шарнирно-сочлененный захват с электрическим приводом, легкий, быстро разгоняется и даже может определить, достаточно ли надежно он удерживает объект. Сверхтонкие никель-титановые провода, управляющие движением четырех пальцев прототипа, могут быстро создавать и высвобождать мощный вакуум с помощью присосок, расположенных на кончиках пальцев искусственной руки. Инженеры продемонстрируют потенциал своей технологии на Hannover Messe (30 мая – 2 июня, зал 2, стенд B28).
В современных автомобильных сборочных линиях промышленные роботы, манипулирующие и позиционирующие тяжелые детали кузова автомобиля, являются неотъемлемой частью процесса сборки автомобиля. Но системы захвата, которыми оснащены эти роботы-манипуляторы, часто не особенно адаптируются. Проблемы могут часто возникать, когда роботизированному захвату приходится переключаться на работу с объектом другой формы, например, пытаться ухватиться за дверную панель легкового автомобиля после того, как он только что манипулировал дверью универсала. Гибкость не является основной характеристикой этих традиционных систем. Если новая дверь имеет отверстие именно там, где захват хочет удерживать панель, другой робот должен будет вступить во владение, или все усложнится, поскольку исходный робот необходимо будет переоборудовать и перепрограммировать. «В настоящее время концевые эффекторы роботов — технический термин для захватов — могут только монотонно захватывать один и тот же объект снова и снова, особенно когда процесс сборки включает в себя работу с плоскими или слегка изогнутыми деталями, такими как металлические или стеклянные листы». объясняет профессор Стефан Зелеке.
Но системы захвата, которыми оснащены эти роботы-манипуляторы, часто не особенно адаптируются. Проблемы могут часто возникать, когда роботизированному захвату приходится переключаться на работу с объектом другой формы, например, пытаться ухватиться за дверную панель легкового автомобиля после того, как он только что манипулировал дверью универсала. Гибкость не является основной характеристикой этих традиционных систем. Если новая дверь имеет отверстие именно там, где захват хочет удерживать панель, другой робот должен будет вступить во владение, или все усложнится, поскольку исходный робот необходимо будет переоборудовать и перепрограммировать. «В настоящее время концевые эффекторы роботов — технический термин для захватов — могут только монотонно захватывать один и тот же объект снова и снова, особенно когда процесс сборки включает в себя работу с плоскими или слегка изогнутыми деталями, такими как металлические или стеклянные листы». объясняет профессор Стефан Зелеке.
Благодаря новой разработке его исследовательской группы в Лаборатории интеллектуальных систем материалов в Саарландском университете и в Центре мехатроники и технологий автоматизации в Саарбрюккене (ZeMA), эти роботы могут выполнять гораздо более разнообразные операции в будущем.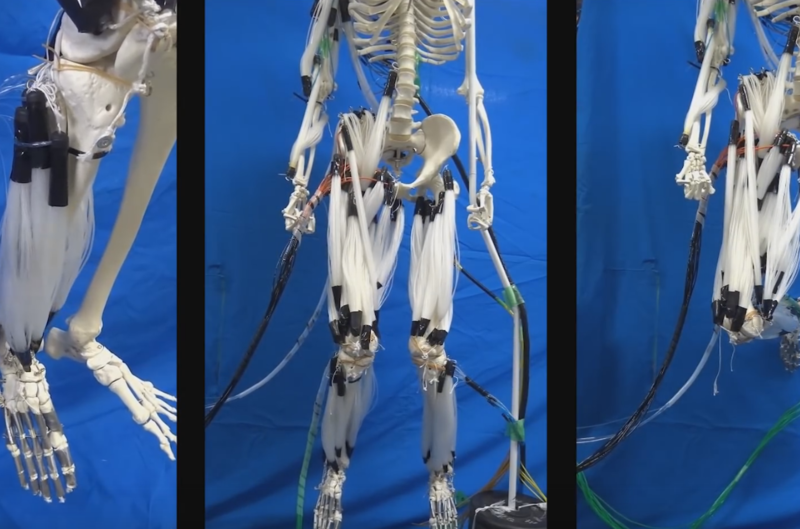 Технология, разработанная исследователями, может улучшить адаптируемость концевых эффекторов, так что их можно будет либо быстро перепрограммировать для размещения новой заготовки без необходимости прерывания операции сборки, либо они смогут выполнять эту перенастройку самостоятельно, используя алгоритмы машинного обучения. «Такая адаптируемая система захвата и манипулятора может помочь сделать производственные и сборочные операции намного более гибкими, особенно если учесть тот факт, что наша система не требует тяжелой техники или каких-либо электрических или пневматических приводов. Все, что ему нужно, — это источник электроэнергии», — говорит Штефан Зелеке.
Технология, разработанная исследователями, может улучшить адаптируемость концевых эффекторов, так что их можно будет либо быстро перепрограммировать для размещения новой заготовки без необходимости прерывания операции сборки, либо они смогут выполнять эту перенастройку самостоятельно, используя алгоритмы машинного обучения. «Такая адаптируемая система захвата и манипулятора может помочь сделать производственные и сборочные операции намного более гибкими, особенно если учесть тот факт, что наша система не требует тяжелой техники или каких-либо электрических или пневматических приводов. Все, что ему нужно, — это источник электроэнергии», — говорит Штефан Зелеке.
Команда Seelecke примет участие в выставке Hannover Messe в этом году, где они продемонстрируют прототип, который представляет собой важный шаг на пути к достижению этой производственной цели. Прототип системы сам по себе является результатом многочисленных исследовательских проектов и докторских диссертаций. Вся система включает в себя ряд оригинальных новых разработок в области робототехники, в том числе шарнирно-сочлененный концевой эффектор, в котором используются искусственные мышцы, позволяющие четырем пальцам двигаться в любом направлении.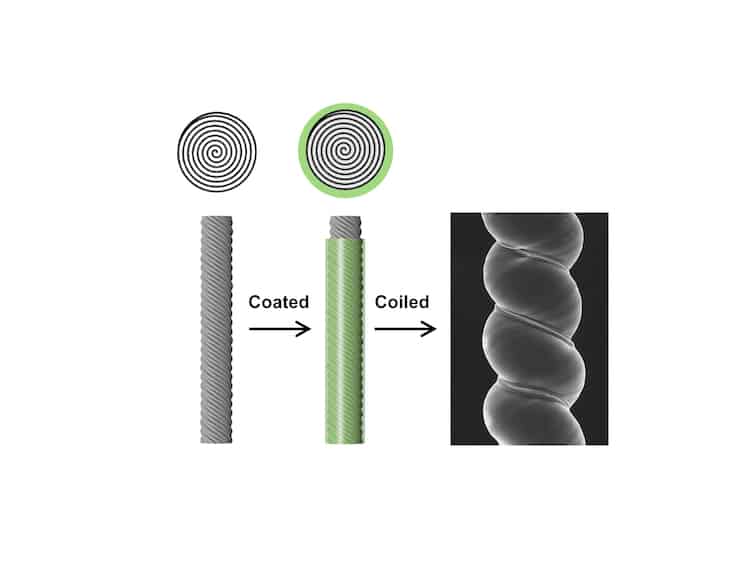 Так же, как и человеческая рука, робот-манипулятор может приспосабливаться к объектам различной формы и поэтому может избегать, например, отверстий в дверной панели другой модели автомобиля. «Поэтому наша система не ограничивается деталями с одинаковой геометрией», — говорит Пол Моцки, дипломированный инженер, который помогал разрабатывать систему во время своей докторской исследовательской работы. Еще одна особенность прототипа из Саарбрюккена, в которой он работает лучше, чем человеческая рука, заключается в том, что на кончиках пальцев у него есть вакуумные подушечки, а это означает, что все, на что захватывает пальцы, будет удерживаться чрезвычайно надежно.
Так же, как и человеческая рука, робот-манипулятор может приспосабливаться к объектам различной формы и поэтому может избегать, например, отверстий в дверной панели другой модели автомобиля. «Поэтому наша система не ограничивается деталями с одинаковой геометрией», — говорит Пол Моцки, дипломированный инженер, который помогал разрабатывать систему во время своей докторской исследовательской работы. Еще одна особенность прототипа из Саарбрюккена, в которой он работает лучше, чем человеческая рука, заключается в том, что на кончиках пальцев у него есть вакуумные подушечки, а это означает, что все, на что захватывает пальцы, будет удерживаться чрезвычайно надежно.
Искусственные мышечные волокна, контролирующие движения рук, пальцев и присосок, состоят из пучков проводов с памятью формы. «Если мы позволим электрическому току течь через эти никель-титановые провода, сплав станет теплее, и его решетчатая структура трансформируется таким образом, что длина провода уменьшится. Когда по проводу не течет ток, он остывает и снова удлиняется.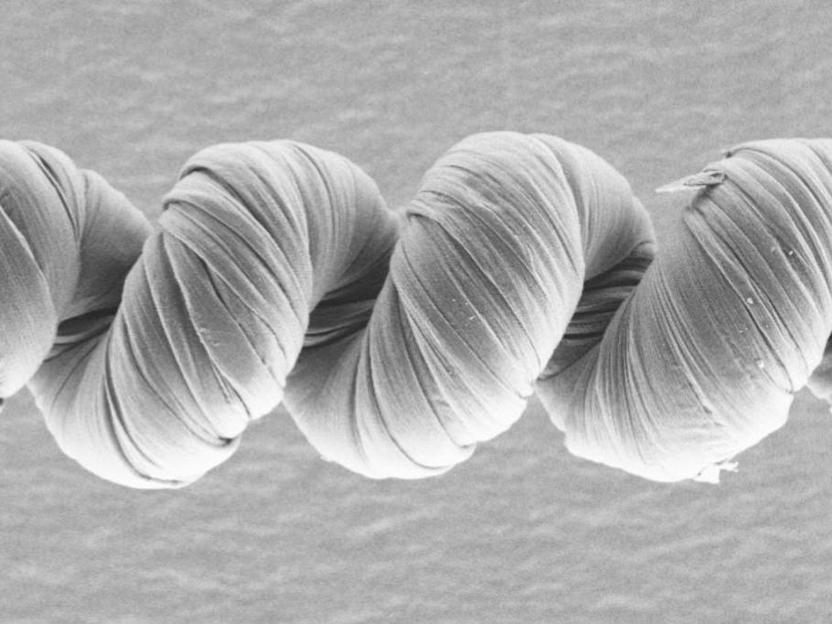 Пучки ультратонких проводов обеспечивают большую площадь поверхности, через которую может очень эффективно передаваться тепло, поэтому процесс охлаждения и удлинения происходит очень быстро», — объясняет Пол Моцки. Таким образом, искусственные мышцы могут быстро напрягаться и сгибаться точно так же, как человеческие мышечные волокна, а это означает, что четыре мускульных пальца на роботизированном захвате могут очень быстро двигаться и реагировать на изменения. «Несмотря на свои небольшие размеры, эти провода могут генерировать значительную растягивающую силу. На самом деле эти провода с памятью формы обладают самой высокой плотностью энергии среди всех известных приводных механизмов», — говорит исследователь.
Пучки ультратонких проводов обеспечивают большую площадь поверхности, через которую может очень эффективно передаваться тепло, поэтому процесс охлаждения и удлинения происходит очень быстро», — объясняет Пол Моцки. Таким образом, искусственные мышцы могут быстро напрягаться и сгибаться точно так же, как человеческие мышечные волокна, а это означает, что четыре мускульных пальца на роботизированном захвате могут очень быстро двигаться и реагировать на изменения. «Несмотря на свои небольшие размеры, эти провода могут генерировать значительную растягивающую силу. На самом деле эти провода с памятью формы обладают самой высокой плотностью энергии среди всех известных приводных механизмов», — говорит исследователь.
Короткий электрический импульс — это все, что нужно для создания, а затем высвобождения мощного вакуума. Таким образом, рука робота может захватывать предметы и свободно перемещать их во всех направлениях. Системе не нужен сжатый воздух для создания вакуума, она бесшумна и подходит для использования в чистых помещениях. Нет необходимости в подаче дополнительной электроэнергии, когда захват удерживает объект, даже если объект необходимо захватить в течение длительного времени или если его необходимо удерживать под углом. Чтобы сконструировать механизм вакуумного захвата, исследователи размещают пучки этих ультратонких проводов наподобие круговой мышцы вокруг тонкого металлического диска, который может переворачиваться вверх или вниз, как игрушка-лягушка. Металлический диск прикреплен к резиновой мембране, и при подаче электрического импульса на провода они сокращаются, и диск переворачивает положение, натягивая мембрану, что при контакте захвата с плоской гладкой поверхностью создает сильное вакуум.
Нет необходимости в подаче дополнительной электроэнергии, когда захват удерживает объект, даже если объект необходимо захватить в течение длительного времени или если его необходимо удерживать под углом. Чтобы сконструировать механизм вакуумного захвата, исследователи размещают пучки этих ультратонких проводов наподобие круговой мышцы вокруг тонкого металлического диска, который может переворачиваться вверх или вниз, как игрушка-лягушка. Металлический диск прикреплен к резиновой мембране, и при подаче электрического импульса на провода они сокращаются, и диск переворачивает положение, натягивая мембрану, что при контакте захвата с плоской гладкой поверхностью создает сильное вакуум.
Захват реагирует очень быстро и очень точно. «В обычных роботизированных руках масса руки ограничивает величину ускорения, которое может быть достигнуто. Наша технология означает, что мы можем создавать легкие системы с превосходной маневренностью», — объясняет Пол Моцки. Система управляется полупроводниковой микросхемой. Никакие другие датчики не нужны: «Провода с памятью формы эффективно действуют как полностью интегрированные датчики, предоставляя нам все необходимые данные. Блок управления способен точно соотносить данные об электрическом сопротивлении со степенью деформации проводов. В любой момент времени система знает точное положение каждого пучка проводов с памятью формы», — объясняет Моцки. Таким образом, инженеры могут запрограммировать систему для выполнения высокоточных движений, и, в отличие от систем, которые обычно используются сегодня, система-прототип может быть перепрограммирована даже во время работы сборочного рычага.
Никакие другие датчики не нужны: «Провода с памятью формы эффективно действуют как полностью интегрированные датчики, предоставляя нам все необходимые данные. Блок управления способен точно соотносить данные об электрическом сопротивлении со степенью деформации проводов. В любой момент времени система знает точное положение каждого пучка проводов с памятью формы», — объясняет Моцки. Таким образом, инженеры могут запрограммировать систему для выполнения высокоточных движений, и, в отличие от систем, которые обычно используются сегодня, система-прототип может быть перепрограммирована даже во время работы сборочного рычага.
Поскольку никель-титановые провода обладают сенсорными свойствами, рука может определить, удерживается ли объект ненадежно. Если он чувствует, что вакуум недостаточно силен, он реагирует, и пальцы крепче сжимают его. Он также может выдавать предупреждения в случае неисправности или усталости материала. «Встроенные функции датчиков означают, что наша система имеет встроенный мониторинг состояния», — говорит Пол Моцки, который вместе с профессором Зеелеке основал компанию mateligent GmbH с целью внедрения этой и других интеллектуальных систем материалов в промышленную эксплуатацию.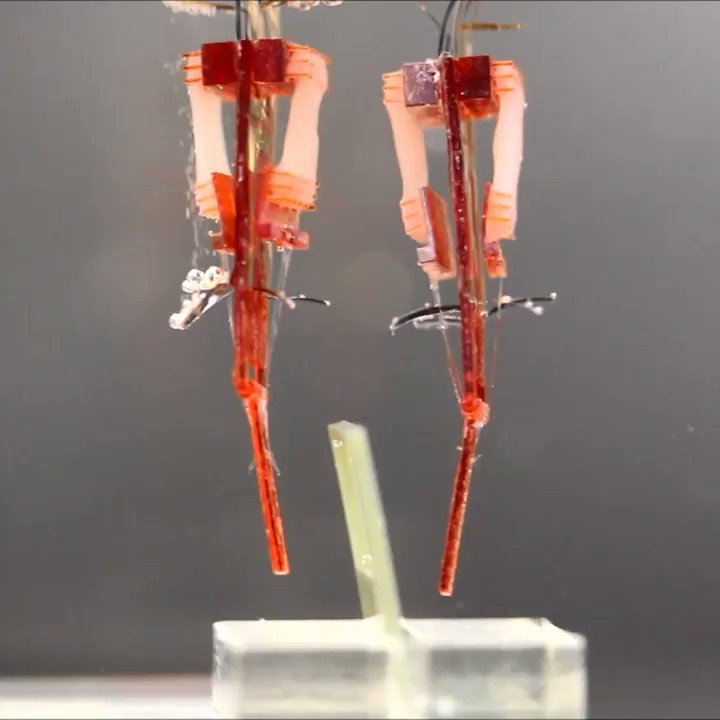
Лаборатория интеллектуальных систем материалов: https://imsl.de
mateligent GmbH: https://mateligent.de
Отказ от ответственности: AAAS и EurekAlert! не несут ответственности за достоверность новостных сообщений, размещенных на EurekAlert! содействующими учреждениями или для использования любой информации через систему EurekAlert.
Самочувствительная искусственная мышца на основе жидкокристаллического эластомера и легкоплавких сплавов
Тамараси Дживандара, Tech Xplore
Многофункциональная искусственная мышца, состоящая из трубчатого LCE с покрытием PDA и стержня LMPA. (A) Многофункциональная искусственная мышца, состоящая из трубчатого привода LCE, покрытого PDA и стержнем LMPA. (B) Этапы изготовления многофункциональной искусственной мышцы: Polydomain LCE был изготовлен в трубчатых и стержнеобразных стеклянных формах; монодоменный ЖКЭ получали растяжением полидоменного ЖКЭ и фотополимеризацией избыточных акрилатных групп в УФ-свете; трубчатый привод на основе LCE, покрытый PDA, формировали путем погружения трубчатого LCE в буферный раствор допамина/трис-основания; Многофункциональная искусственная мышца была получена путем внедрения стержня LMPA в трубчатый привод на основе LCE с покрытием PDA.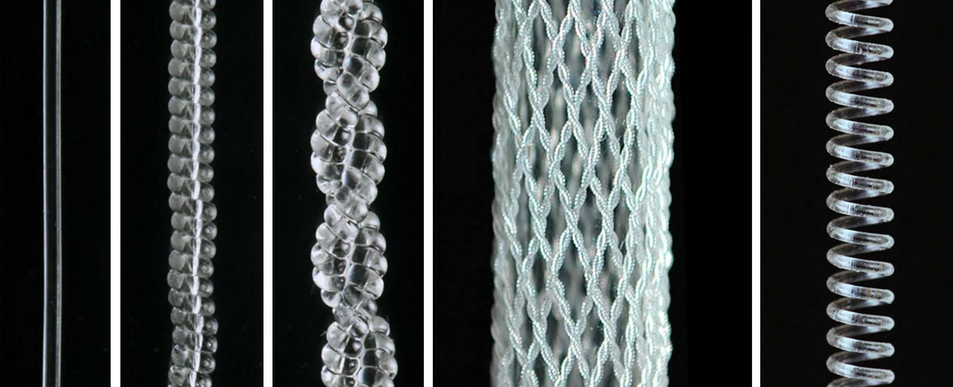 Масштабные линейки, 15 мм. (C) Принцип работы многофункциональной искусственной мышцы под лазерным облучением. (D) Изменение угла многофункциональной искусственной мышцы и трубчатого привода на основе LCE с покрытием PDA при лазерном облучении мощностью 1,3 Вт. Масштабные линейки, 10 мм. Кредит: Научные достижения (2022). DOI: 10.1126/sciadv.abn5722
Масштабные линейки, 15 мм. (C) Принцип работы многофункциональной искусственной мышцы под лазерным облучением. (D) Изменение угла многофункциональной искусственной мышцы и трубчатого привода на основе LCE с покрытием PDA при лазерном облучении мощностью 1,3 Вт. Масштабные линейки, 10 мм. Кредит: Научные достижения (2022). DOI: 10.1126/sciadv.abn5722
Материаловеды и биоинженеры, работающие на стыке регенеративной медицины и биоматериалов, стремятся разработать программируемые по форме искусственные мышцы с возможностями самоощущения для применения в медицине. В новом отчете, опубликованном в журнале Science Advances , Хаоран Лю и группа исследователей в области инженерии систем и коммуникаций из Пограничного института науки и технологий Университета Цзяотун, Китай, вдохновились парным поведением мышц, костей и нервных систем млекопитающих и других живых организмов для создания многофункциональной искусственной мышцы в лабораторных условиях. Конструкция содержала жидкокристаллический эластомер (LCE) с покрытием из полидофамина и легкоплавкие сплавы (LMPA) в концентрической трубке или стержне.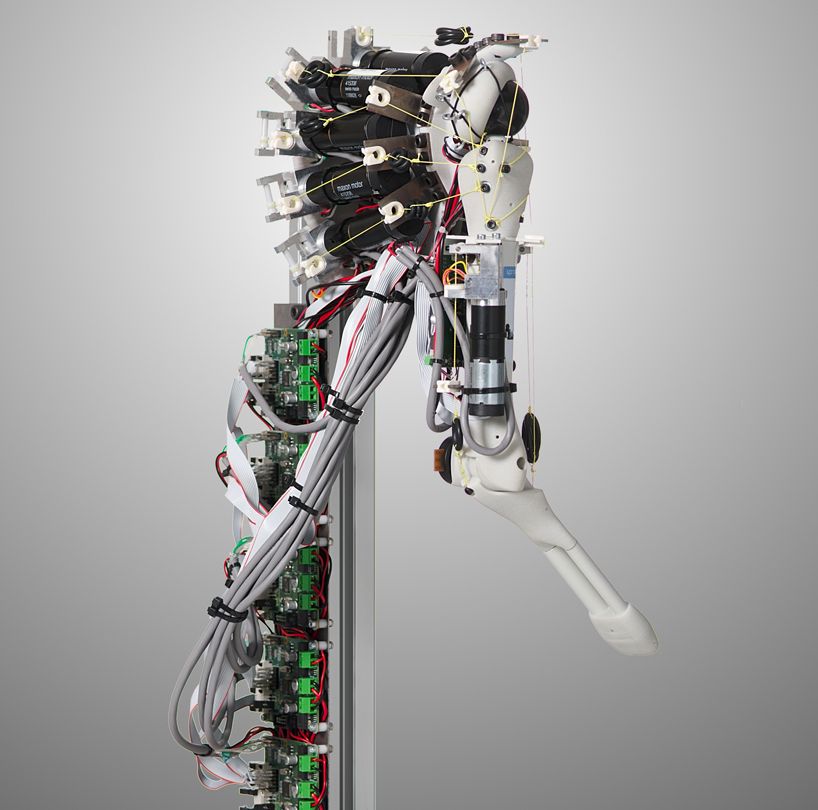 В то время как команда использовала внешний жидкокристаллический эластомер для имитации обратимого сокращения и восстановления, они внедрили внутренний сплав с низкой температурой плавления для блокировки деформации и определения механики сопротивления, очень похожей на функции костей и нервов соответственно. Искусственная мышца продемонстрировала ряд характеристик, включая регулируемое изгибание и деформацию для поддержки тяжелых предметов, и представляет собой прямой и эффективный подход к разработке биомиметических мягких устройств.
В то время как команда использовала внешний жидкокристаллический эластомер для имитации обратимого сокращения и восстановления, они внедрили внутренний сплав с низкой температурой плавления для блокировки деформации и определения механики сопротивления, очень похожей на функции костей и нервов соответственно. Искусственная мышца продемонстрировала ряд характеристик, включая регулируемое изгибание и деформацию для поддержки тяжелых предметов, и представляет собой прямой и эффективный подход к разработке биомиметических мягких устройств.
Мягкая робототехника, вдохновленная скелетно-мышечно-нервной системой
Ученые стремятся реализовать биосовместимость между мягкими роботизированными элементами и людьми для вспомогательного движения и высокой несущей способности; однако такие усилия сложны. Большинство традиционных роботов до сих пор используются в промышленности, сельском хозяйстве и аэрокосмической отрасли для высокоточных сенсорных приложений, несущих нагрузку.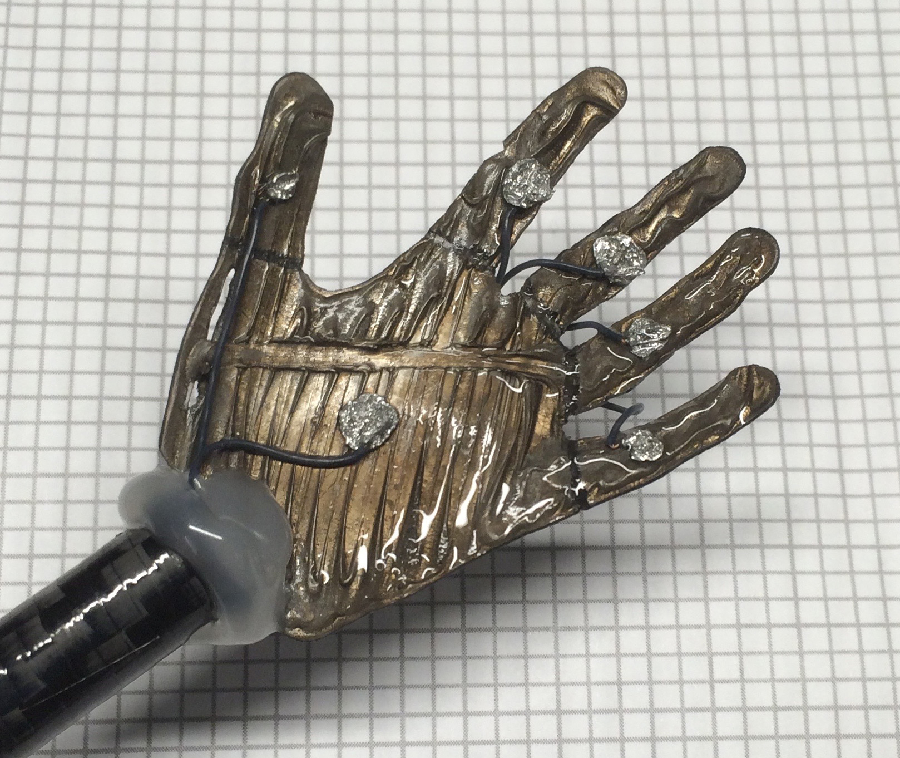 Несколько функциональных мягких роботов, напротив, зависят от материалов для повышения безопасности взаимодействия человека с машиной. Таким образом, мягкие роботы дополняют жестких роботов и имеют огромный потенциал для применения. Биомиметические конструкции также послужили альтернативным источником вдохновения для имитации скелетно-мышечно-нервной системы для облегчения маневренных движений и быстрой реакции или мышления, с уникальной формой тела, подходящей для задач и выполняющей разнообразные физиологические функции. В этой работе Лю и соавторы были вдохновлены увлекательной идеей биомимикрии для разработки многофункциональных искусственных мышц для интеллектуальных приложений.
Несколько функциональных мягких роботов, напротив, зависят от материалов для повышения безопасности взаимодействия человека с машиной. Таким образом, мягкие роботы дополняют жестких роботов и имеют огромный потенциал для применения. Биомиметические конструкции также послужили альтернативным источником вдохновения для имитации скелетно-мышечно-нервной системы для облегчения маневренных движений и быстрой реакции или мышления, с уникальной формой тела, подходящей для задач и выполняющей разнообразные физиологические функции. В этой работе Лю и соавторы были вдохновлены увлекательной идеей биомимикрии для разработки многофункциональных искусственных мышц для интеллектуальных приложений.
Демонстрация многофункционального искусственного мускула, поднимающего и переносящего 100-граммовый объект с помощью руки робота. Предоставлено: Science Advances, 10.1126/sciadv.abn5722 Биомимикрия в лаборатории
Во время экспериментов команда придала программируемую форму, блокировку деформации и самоощущение с помощью жидкокристаллических эластомеров (LCE) и сплавов с низкой температурой плавления.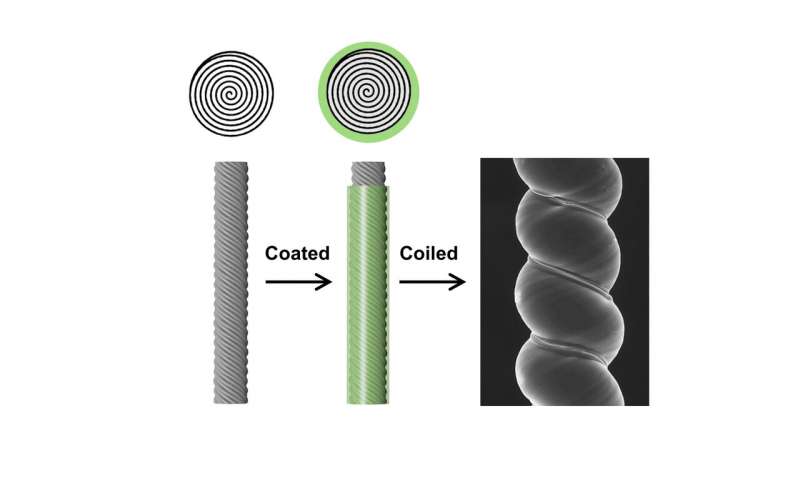 (LMPA) в форме концентрической трубки или стержня. В то время как внешний эластомер обеспечивал обратимое сжатие и восстановление, внутренний сплав создавал нагрузку формы для функций мышц и костей. Чтобы добиться быстрого фототермического преобразования под действием светового излучения, команда исследователей покрыла поверхность эластомера тонкой пленкой полидофамина и вызвала деформацию сжатия и изгиба. Этот процесс позволил использовать удобную функциональность в сложных и неизвестных средах для создания искусственных мышц с изменяемой формой с высокой несущей способностью и низким энергопотреблением для интеллектуальной функциональности.
(LMPA) в форме концентрической трубки или стержня. В то время как внешний эластомер обеспечивал обратимое сжатие и восстановление, внутренний сплав создавал нагрузку формы для функций мышц и костей. Чтобы добиться быстрого фототермического преобразования под действием светового излучения, команда исследователей покрыла поверхность эластомера тонкой пленкой полидофамина и вызвала деформацию сжатия и изгиба. Этот процесс позволил использовать удобную функциональность в сложных и неизвестных средах для создания искусственных мышц с изменяемой формой с высокой несущей способностью и низким энергопотреблением для интеллектуальной функциональности.
Принцип работы
Факторы, влияющие на изгибную деформацию многофункциональной искусственной мышцы. (A) Распределение напряжения и угол изгиба многофункциональной искусственной мышцы при различной мощности облучения в моделировании. (B) Максимальная сжимающая сила (F), которую может выдержать стержнеобразный LMPA, когда лазерное тепло локально расплавило небольшую часть LMPA.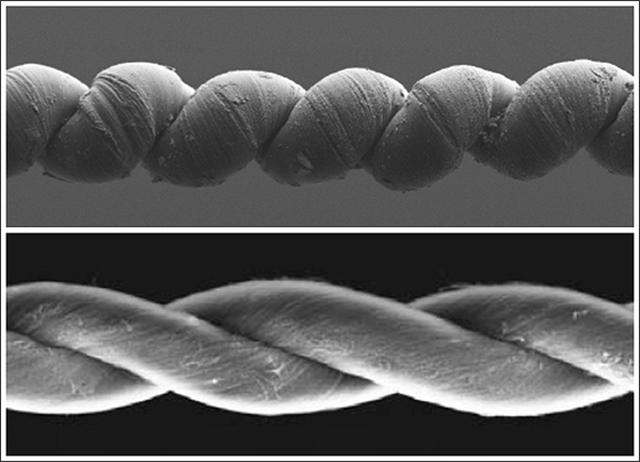 Врезка: поперечное сечение LMPA. (C) Максимальная сжимающая сила (F), которую может выдержать стержнеобразный LMPA, когда лазерное тепло локально расплавит большую часть LMPA. Врезка: поперечное сечение LMPA. (D) Сила срабатывания трубчатого привода на основе LCE с покрытием PDA при различной мощности облучения. (E) Влияние мощности облучения на угол изгиба многофункциональной искусственной мышцы (где L представляет собой расстояние облучения). Врезка: Иллюстрация воздействия лазерного луча на поверхность искусственной мышцы с расстоянием облучения 30 мм и временем облучения 5 с. (F) Влияние площади пятна на угол изгиба многофункциональной искусственной мышцы (L представляет собой расстояние облучения). Вставка: Иллюстрация воздействия лазерного луча на поверхность искусственной мышцы с мощностью излучения 1,5 Вт и временем облучения 5 с. (G) Влияние времени облучения на угол изгиба многофункциональной искусственной мышцы (где L представляет собой расстояние облучения). Врезка: Иллюстрация воздействия лазерного луча на поверхность искусственной мышцы с мощностью излучения 1,4 Вт и расстоянием облучения 30 мм.
Врезка: поперечное сечение LMPA. (C) Максимальная сжимающая сила (F), которую может выдержать стержнеобразный LMPA, когда лазерное тепло локально расплавит большую часть LMPA. Врезка: поперечное сечение LMPA. (D) Сила срабатывания трубчатого привода на основе LCE с покрытием PDA при различной мощности облучения. (E) Влияние мощности облучения на угол изгиба многофункциональной искусственной мышцы (где L представляет собой расстояние облучения). Врезка: Иллюстрация воздействия лазерного луча на поверхность искусственной мышцы с расстоянием облучения 30 мм и временем облучения 5 с. (F) Влияние площади пятна на угол изгиба многофункциональной искусственной мышцы (L представляет собой расстояние облучения). Вставка: Иллюстрация воздействия лазерного луча на поверхность искусственной мышцы с мощностью излучения 1,5 Вт и временем облучения 5 с. (G) Влияние времени облучения на угол изгиба многофункциональной искусственной мышцы (где L представляет собой расстояние облучения). Врезка: Иллюстрация воздействия лазерного луча на поверхность искусственной мышцы с мощностью излучения 1,4 Вт и расстоянием облучения 30 мм. В (E)-(G) были проведены три теста на образцах для каждой точки данных, и планки погрешностей представляют стандартное отклонение трех повторных данных. Кредит: Научные достижения (2022). DOI: 10.1126/sciadv.abn5722
В (E)-(G) были проведены три теста на образцах для каждой точки данных, и планки погрешностей представляют стандартное отклонение трех повторных данных. Кредит: Научные достижения (2022). DOI: 10.1126/sciadv.abn5722
Команда продемонстрировала предложенную многофункциональную мышцу в сочетании с мягкими эластомерами и твердыми сплавами. Лю и др. подготовили жидкокристаллические эластомеры (LCE), используя реакции присоединения Михаэля с аминами и тиолами, и создали слабо сшитую полую эластомерную трубку посредством гелеобразования в стеклянной трубке или стержне. Исследователи представили фототермический эффект, разработав слой полидофамина на поверхности материала, чтобы сохранить превосходную фотостабильность и сильные характеристики поглощения в ближнем инфракрасном диапазоне. Команда показала, как можно разработать многофункциональные искусственные мышцы путем встраивания предварительно изготовленных сплавов с низкой температурой плавления (LMPA) в трубку LCE с полимерным покрытием.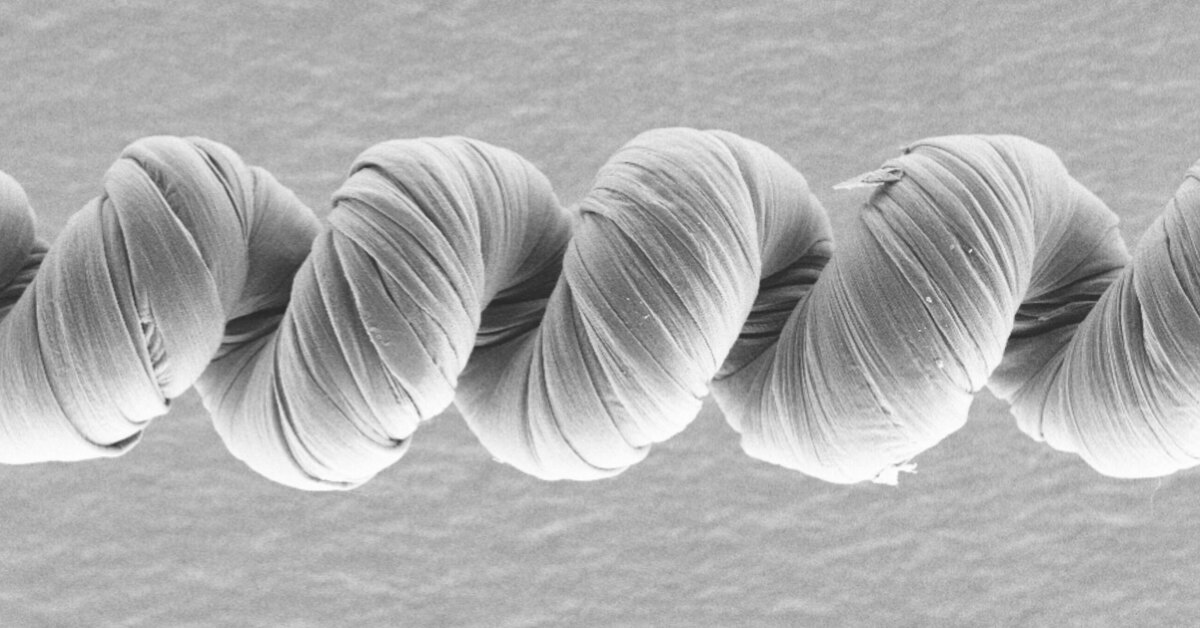 Затем они облучали искусственную мышцу сбоку лазером и вызывали мгновенное преобразование света в тепло в этой области. Сравнительный анализ деформации показал мгновенный изгиб примерно через шесть секунд после лазерного облучения, подчеркнув влияние LMPA на превосходные свойства деформации мышц.
Затем они облучали искусственную мышцу сбоку лазером и вызывали мгновенное преобразование света в тепло в этой области. Сравнительный анализ деформации показал мгновенный изгиб примерно через шесть секунд после лазерного облучения, подчеркнув влияние LMPA на превосходные свойства деформации мышц.
Характеристика многофункциональных искусственных мышц как реконфигурируемой антенны
Лю и др. выполнили анализ конечных элементов с помощью программного обеспечения ABAQUS и смоделировали источник тепла. Они изучили распределение температуры и напряжения искусственной мышцы при различных мощностях облучения. В то время как большие мощности излучения вызывали большое напряжение в эластомере, это дополнительно вызывало большой угол изгиба в области сплава искусственной мышцы. Команда проанализировала угол изгиба многофункциональной искусственной мышцы, зависящий от мощности лазера, площади пятна и времени облучения, используя экспериментальные тесты и моделирование. Они показали, как регулировать гибкую деформацию по углу изгиба, направлению и положению, чтобы увеличить возможность формирования программируемой по форме искусственной мышцы.
Сенсорная функция многофункциональной искусственной мышцы.
 (A) Схематическое изображение многофункциональной искусственной мышцы до и после деформации изгиба. (B) Реакция ΔR/R на различные углы изгиба. Несколько образцов с идентичным начальным состоянием в этом испытании были облучены при разной мощности облучения. (C) Изменение сопротивления одной многофункциональной искусственной мышцы, последовательно облученной в трех разных положениях. Масштабные линейки, 10 мм. В (Б) и (В) один конец многофункциональных искусственных мышц был зафиксирован, а другой конец был свободен. Кредит: Научные достижения (2022). DOI: 10.1126/sciadv.abn5722
(A) Схематическое изображение многофункциональной искусственной мышцы до и после деформации изгиба. (B) Реакция ΔR/R на различные углы изгиба. Несколько образцов с идентичным начальным состоянием в этом испытании были облучены при разной мощности облучения. (C) Изменение сопротивления одной многофункциональной искусственной мышцы, последовательно облученной в трех разных положениях. Масштабные линейки, 10 мм. В (Б) и (В) один конец многофункциональных искусственных мышц был зафиксирован, а другой конец был свободен. Кредит: Научные достижения (2022). DOI: 10.1126/sciadv.abn5722
 Scale bars, 10 mm. Credit: <i>Science Advances</i> (2022). DOI: 10.1126/sciadv.abn5722″>
Scale bars, 10 mm. Credit: <i>Science Advances</i> (2022). DOI: 10.1126/sciadv.abn5722″> Изгибная деформация многофункциональной искусственной мышцы. (A) Непрерывная регулировка угла изгиба многофункциональной искусственной мышцы путем облучения положения изгиба с одного и того же направления несколько раз (I, II, III и IV). Масштабные линейки, 10 мм. (B) Различные направления изгиба многофункциональной искусственной мышцы, полученные путем регулировки направления лазерного излучения (I, II, III и IV). Масштабные линейки, 10 мм. (C) Множественные изгибающиеся суставы, полученные путем облучения многофункциональной искусственной мышцы в разных положениях (I, II и III) и с разных направлений (0°, 60° и 180°). Масштабные линейки, 5 мм. (D) Изменение формы многофункциональной искусственной мышцы путем упорядоченного применения лазера в разных положениях. В эксперименте один конец многофункциональной искусственной мышцы зажимали, а другой оставляли свободным. Масштабные линейки, 10 мм. Кредит: Научные достижения (2022). DOI: 10.1126/sciadv.abn5722
Масштабные линейки, 10 мм. Кредит: Научные достижения (2022). DOI: 10.1126/sciadv.abn5722
 (A) Схематическое изображение многофункциональной искусственной мышцы до и после деформации изгиба. (B) Реакция ΔR/R на различные углы изгиба. Несколько образцов с идентичным начальным состоянием в этом испытании были облучены при разной мощности облучения. (C) Изменение сопротивления одной многофункциональной искусственной мышцы, последовательно облученной в трех разных положениях. Масштабные линейки, 10 мм. В (Б) и (В) один конец многофункциональных искусственных мышц был зафиксирован, а другой конец был свободен. Кредит: Научные достижения (2022). DOI: 10.1126/sciadv.abn5722
(A) Схематическое изображение многофункциональной искусственной мышцы до и после деформации изгиба. (B) Реакция ΔR/R на различные углы изгиба. Несколько образцов с идентичным начальным состоянием в этом испытании были облучены при разной мощности облучения. (C) Изменение сопротивления одной многофункциональной искусственной мышцы, последовательно облученной в трех разных положениях. Масштабные линейки, 10 мм. В (Б) и (В) один конец многофункциональных искусственных мышц был зафиксирован, а другой конец был свободен. Кредит: Научные достижения (2022). DOI: 10.1126/sciadv.abn5722 Scale bars, 5 mm. (B) Experimental results of S11 band of the reconfigurable antenna at different bending angles. Agilent AV3672E-S vector network analyzer (VNA) was used for S11 measurements. (C) Vertical polarization and far-field patterns of the multifunctional artificial muscle as an antenna in the xOz plane. Credit: <i>Science Advances</i> (2022). DOI: 10.1126/sciadv.abn5722″>
Scale bars, 5 mm. (B) Experimental results of S11 band of the reconfigurable antenna at different bending angles. Agilent AV3672E-S vector network analyzer (VNA) was used for S11 measurements. (C) Vertical polarization and far-field patterns of the multifunctional artificial muscle as an antenna in the xOz plane. Credit: <i>Science Advances</i> (2022). DOI: 10.1126/sciadv.abn5722″> Применение многофункциональной искусственной мышцы в качестве реконфигурируемой антенны: (А) Различные углы изгиба многофункциональной искусственной мышцы после первого, второго и третьего лазерного облучения в безэховой камере. Масштабные линейки, 5 мм. (B) Экспериментальные результаты диапазона S11 реконфигурируемой антенны при разных углах изгиба. Для измерений S11 использовали векторный анализатор цепей (VNA) Agilent AV3672E-S. (C) Вертикальная поляризация и картины дальнего поля многофункциональной искусственной мышцы в качестве антенны в плоскости xOz. Кредит: Научные достижения (2022). DOI: 10.1126/sciadv.abn5722
DOI: 10.1126/sciadv.abn5722
Исследовательская группа охарактеризовала быструю трансформацию формы и эффективность фиксации деформации искусственной мышцы с помощью ряда экспериментов, включая циклические тесты, чтобы продемонстрировать ее деформационную способность. Они также охарактеризовали сенсорные функции для мониторинга динамического поведения искусственных мышц в режиме реального времени на основе изменений электрического сопротивления. Лю и др. В дальнейшем использовали свойства нескольких материалов и продемонстрировали применение предложенных многофункциональных искусственных материалов в качестве реконфигурируемой антенны. В этом случае они измерили угол изгиба, нанеся лазер на поверхность искусственной мышцы, чтобы он функционировал как дистанционно управляемая реконфигурируемая антенна.
Outlook
Таким образом, Хаоран Лю и его коллеги разработали искусственную мышцу с программируемой формой, фиксацией деформации и самочувствием на основе поведенческих характеристик живых костей, мышц и нервов с использованием мягких эластомерных материалов в сочетании с высокой -жесткость легированных материалов. Жесткий сплав с низкой температурой плавления (LMPA) имитировал эндоскелеты живых организмов, чтобы обеспечить структурную прочность, в то время как чистые мягкие материалы, изготовленные из жидкокристаллического эластомера (LCE), обеспечивали мощное исполнительное усилие и безопасную физическую совместимость для имитации естественных мышц. Исследование предоставило первый пример для формирования искусственной мышцы с вышеупомянутыми характеристиками, где конструкции продемонстрировали быстрое преобразование формы и свойства деформации, чтобы получить экспериментальные роботизированные руки для применения в тактильных дисплеях и медицине.
Жесткий сплав с низкой температурой плавления (LMPA) имитировал эндоскелеты живых организмов, чтобы обеспечить структурную прочность, в то время как чистые мягкие материалы, изготовленные из жидкокристаллического эластомера (LCE), обеспечивали мощное исполнительное усилие и безопасную физическую совместимость для имитации естественных мышц. Исследование предоставило первый пример для формирования искусственной мышцы с вышеупомянутыми характеристиками, где конструкции продемонстрировали быстрое преобразование формы и свойства деформации, чтобы получить экспериментальные роботизированные руки для применения в тактильных дисплеях и медицине.
Узнайте больше
Самоходная, бесконечно программируемая искусственная ресничка
Дополнительная информация:
Хаоран Лю и др. , Программируемая по форме, блокирующая деформацию и самочувствующаяся искусственная мышца на основе жидкокристаллического эластомера и сплава с низкой температурой плавления, Science Advances (2022). DOI: 10.1126/sciadv.abn5722
, Программируемая по форме, блокирующая деформацию и самочувствующаяся искусственная мышца на основе жидкокристаллического эластомера и сплава с низкой температурой плавления, Science Advances (2022). DOI: 10.1126/sciadv.abn5722
Wenqi Hu et al, Небольшой мягкотелый робот с мультимодальным передвижением, Nature (2018). DOI: 10.1038/nature25443
Информация журнала:
Научные достижения
,
Природа
© 2022 Наука Х Сеть
Цитата :
Самоощущающаяся искусственная мышца на основе жидкокристаллического эластомера и легкоплавких сплавов (2022, 26 мая)
получено 6 октября 2022 г.
с https://techxplore.