Содержание
Развитие робототехники. История и перспективы развития робототехники
Развитие робототехники. История и перспективы развития робототехники
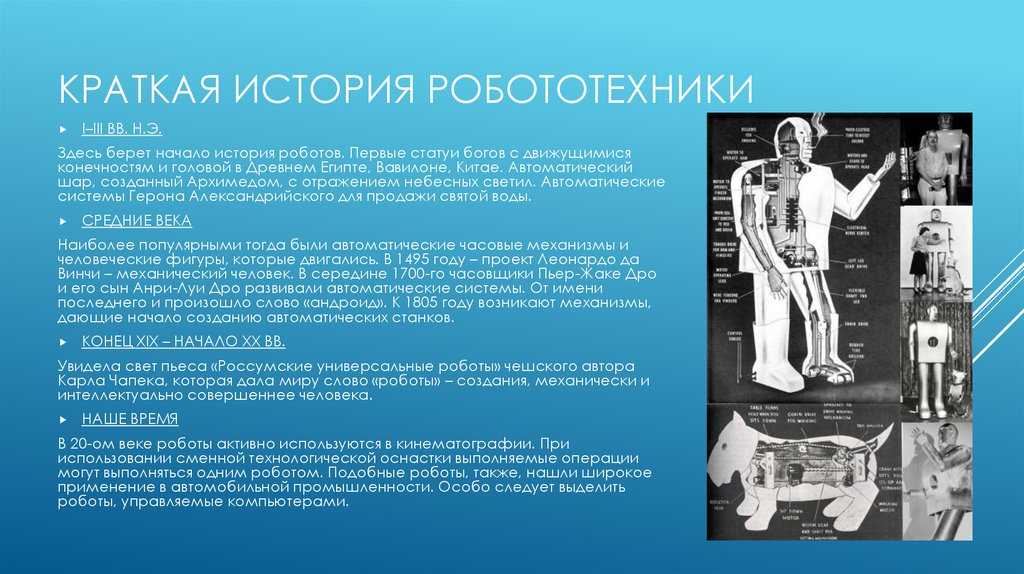
Прикладная наука, занимающаяся созданием и использованием роботов, всевозможных систем автоматизации, которая возникла как результат слияния кибернетики и механики, имеет гораздо более долгую историю, чем может показаться. На самом деле развитие робототехники началось еще до нашей эры, когда Архит Тарентский в IV веке до н.э. задумал создание первого в истории человечества робота – механической птицы из дерева, которую предполагалось приводить в движение паровой тягой для подъема до 200 метров ввысь.
Первый человекоподобный робот был сконструирован Леонардо да Винчи в 1495 году. Это был рыцарь, способный шевелить руками и вращать головой. К слову, в наше время ученым удалось создать реплику конструкции по эскизным чертежам. Но гораздо дальше всемирного гения продвинулся в XVIII веке механических дел мастер Жак де Вокансон, создавший уникальную утку, позже названную в его честь, а также играющего на флейте андроида, в числе умений коего было проигрывание 11 мелодий. История развития робототехники навсегда запечатлела это изображение.
История развития робототехники навсегда запечатлела это изображение.
К слову, сам термин «робот» был изобретен уже в XX веке. Что интересно, пришел он из литературы – в 1920 году писатель из Чехии Карел Чапек написал пьесу о производстве, выпускающем ненастоящих людей, где впервые было упомянуто это слово. Кроме того, его творение «Р.У.Р.» стало передовым произведением о «злых» роботах.
Исторически развитие робототехники именно в ХХ веке стало происходить ускоренными темпами ввиду всеобщего научно-технического прогресса. Этот термин был придуман известным фантастом Айзеком Азимовым в 1942 году, создавшем целую вселенную, где люди жили бок о бок с роботами.
Непосредственно история развития робототехники берет свое начало в 60-х годах ХХ века, когда на производстве General Motors впервые начали использоваться промышленные роботизированные манипуляторы от компании Unimation. В начале 1970-х годов был создан первый мультифункциональный подвижный робот Shakey, который был способен оценивать и анализировать собственные действия.
Воплощением следующего этапа, чье влияние на развитие робототехники неоспоримо, стал робот-марсоход «Соджорнер», приземлившийся на Марсе в 1997 году. Он сыграл значительную роль в исследовании красной планеты. Примерно с этого момента начинается активнейшее развитие в этом направлении.
Довольно интересно отметить перспективы развития робототехники. По мнению экспертов, прогресс в этом направлении уже не остановить. Роботы и роботизированные комплексы стали неотъемлемым элементом последней промышленной революции, характерной чертой которой являются всеобщая роботизация производства и обширное внедрение аддитивных технологических разработок.
Автоматизация промышленных предприятий сейчас идет полным ходом, и сегодня уже вполне нормальная ситуация, когда на заводе трудятся всего 20–30 человек, а вся работа выполняется машинами. А в России перспективы развития робототехники еще и дополнительно стимулируются государством, чтобы сократить отставание от передовых стран.
История создания первых роботов — Робототехника
История создания первых роботов |
ГЛУБОКАЯ ДРЕВНОСТЬ История робототехники уходит в глубокую древность. Уже в те времена появились идеи создания технических СРЕДНИЕ ВЕКА В средние века большой популярностью пользовались различного рода автоматы, основанные на использовании часовых механизмов. Были созданы всевозможные часы с движущимися фигурами людей, ангелов и т. п. К этому периоду относятся сведения о создании первых подвижных человекоподобных механических фигур – андроидов. Так, андроид алхимика Альберта Великого (1193 – 1280) представлял собой куклу в рост человека, которая, когда стучали в дверь, открывала и закрывала ее, кланяясь при этом входящему. Механическая утка Жака де Вокансона Подвижными пальцами он мог исполнять 11 мелодий с помощью заложенной в него программы. Вокансон также создал механическую утку, покрытую настоящими перьями, которая могла ходить, двигать крыльями, крякать, пить воду, клевать зерно и, перемалывая его маленькой внутренней мельницей, отправлять нужду на пол. КОНЕЦ XIX – ПЕРВАЯ ПОЛОВИНА XX ВВ Благодаря всеобщему интересу к роботам, изобретателям удается разрабатывать оригинальные конструкции роботов-андроидов: «Мистер Телевокс» «Альфа» «Эрик»
Несмотря на такой прорыв в сфере новой техники и демонстрацию творческих возможностей человека, все эти роботы имели крайне узкое практическое применение. Вторая половина XX века Возникновение современных роботов следует отнести к 1959 г. В этом году в США были созданы первые промышленные манипуляторы с программным управлением, которые получили общепринятое название промышленных роботов (ПР) и положили начало коммерческому производству. Первые коммерческие успехи применения промышленных роботов явились мощным импульсом для их дальнейшего совершенствования. В начале 1970-х гг. появляются роботы, управляемые компьютерами. Первый мини-компьютер, управляющий роботом, был выпущен в 1974 г. фирмой «Cincinnati Milacron», одной из ведущих фирм – изготовителей роботов в США. В конце 1971 г. американской фирмой «INTEL» был создан первый микропроцессор, а несколькими годами позже появляются роботы с микропроцессорным управлением, что обусловило существенное повышение их качества при одновременном снижении стоимости. В последующие годы после создания и выхода на промышленный рынок первых роботов во всем мире началось стремительное развитие робототехники. Научно-технические достижения робототехники позволили в 1960-1980-х гг. создать ряд сложных научных и специальных робототехнических комплексов для исследования космического пространства (станции типа «Луна», аппараты «Луноход» – СССР; станции типа «Маринер», «Сервейер», «Викинг» — США и др. Одновременно развернулись работы в новой специфической области робототехники — шагающие машины как принципиально новое транспортное средство повышенной проходимости, образцом для которого являются ноги животных и человека. Были созданы экспериментальные образцы четырех- и шестиногих транспортных машин, протезов ног человека, так называемых экзоскелетонов, для парализованных и тяжелобольных. Робототехника как научная дисциплина, формируется совместными усилиями ученых и разработчиков техники в целостное научно-техническое направление, обогащается огромным опытом разработки и эксплуатации самых разнообразных роботов, робототехнических устройств и систем. |
 Это был первый автомат для точного хронометрирования. До нас дошли книги Герона Александрийского (I век н.э.), где описаны подобные и многие другие автоматы древности . В качестве источника энергии в них использовались вода, пар, гравитация (гири). В «Театре автоматов» описано даже устройство целого театра, представление в котором разыгрывали фигурки-куклы, приводимые в движение с помощью системы зубчатых колес, блоков и рычагов.
Это был первый автомат для точного хронометрирования. До нас дошли книги Герона Александрийского (I век н.э.), где описаны подобные и многие другие автоматы древности . В качестве источника энергии в них использовались вода, пар, гравитация (гири). В «Театре автоматов» описано даже устройство целого театра, представление в котором разыгрывали фигурки-куклы, приводимые в движение с помощью системы зубчатых колес, блоков и рычагов. В 13 веке Альберт Великий создал автомат, ставший впоследствии известным как «говорящая голова», способный воспроизводить человеческий голос. В 1495 году Леонардо да Винчи разработал детальный проект механического человека, способного двигать руками и поворачивать голову. А в 1500 году он построил механического льва, который при въезде короля Франции в Милан выдвигался, раздирал когтями грудь и показывал герб Франции. Одновременно с расцветом часового мастерства. Французский механик и изобретатель Жак де Вокансон (1709-1789) создал в 1738 году первое работающее человекоподобное устройство (андроид), которое играло на флейте. «Флейтист» был ростом с человека.
В 13 веке Альберт Великий создал автомат, ставший впоследствии известным как «говорящая голова», способный воспроизводить человеческий голос. В 1495 году Леонардо да Винчи разработал детальный проект механического человека, способного двигать руками и поворачивать голову. А в 1500 году он построил механического льва, который при въезде короля Франции в Милан выдвигался, раздирал когтями грудь и показывал герб Франции. Одновременно с расцветом часового мастерства. Французский механик и изобретатель Жак де Вокансон (1709-1789) создал в 1738 году первое работающее человекоподобное устройство (андроид), которое играло на флейте. «Флейтист» был ростом с человека. Утка состояла из более чем 400 движущихся деталей и была однозначно признана венцом творения мастера.
Утка состояла из более чем 400 движущихся деталей и была однозначно признана венцом творения мастера. 

 ), а также освоения подводных глубин (аппараты «TV», «Москито», «Долфин» – Япония; аппараты «KURV», «RCV» – США; «Манта», «ОСА» – СССР; «ROV», «RM» – Франция; «ARCS» – Канада и др.).
), а также освоения подводных глубин (аппараты «TV», «Москито», «Долфин» – Япония; аппараты «KURV», «RCV» – США; «Манта», «ОСА» – СССР; «ROV», «RM» – Франция; «ARCS» – Канада и др.).13 вех в истории робототехники
1804
Первая автоматизация массового производства
К 18 веку в Соединенном Королевстве и Франции ткачество было крупной, но трудоемкой отраслью; ткачам требовались помощники, чтобы поднимать и опускать нити для изготовления узоров. Изобретатели пытались автоматизировать процесс, и в 1804 году французский изобретатель по имени Жозеф-Мари Жаккар представил то, что впоследствии стало широко распространенным «жаккардовым ткацким станком». Он работал, переводя узоры с перфокарт в команды, которые определяли подъем и опускание нитей, увеличивая скорость, с которой сложные узоры могли быть сплетены, более чем в двадцать раз, с одного дюйма до двух футов в день. Ткацкий станок стал первой широко используемой системой, которая могла следовать программе; в этом смысле это был первый пример компьютерного программирования. Видео: Музей Генри Форда.
Изобретатели пытались автоматизировать процесс, и в 1804 году французский изобретатель по имени Жозеф-Мари Жаккар представил то, что впоследствии стало широко распространенным «жаккардовым ткацким станком». Он работал, переводя узоры с перфокарт в команды, которые определяли подъем и опускание нитей, увеличивая скорость, с которой сложные узоры могли быть сплетены, более чем в двадцать раз, с одного дюйма до двух футов в день. Ткацкий станок стал первой широко используемой системой, которая могла следовать программе; в этом смысле это был первый пример компьютерного программирования. Видео: Музей Генри Форда.
1921
Термин «робот» впервые используется
В своей пьесе «R.U.R.: Универсальные роботы Россума» чешский писатель Карел Чапек рассказывает историю о фабрике, на которой были созданы тысячи синтетических гуманоидов. Они работают так дешево и неустанно, что сократили себестоимость ткацкого материала на 80 процентов. Чапек назвал устройства «роботами» по чешскому слову robota , имея в виду принудительный труд крепостных. Пьеса не только дала роботам их современное имя, но и усилила экзистенциальный страх перед тем, что роботы когда-нибудь заменят людей, поскольку роботы Чапека в конечном итоге восстанут и убьют человечество. Видео: общественное достояние.
Пьеса не только дала роботам их современное имя, но и усилила экзистенциальный страх перед тем, что роботы когда-нибудь заменят людей, поскольку роботы Чапека в конечном итоге восстанут и убьют человечество. Видео: общественное достояние.
1949
Первая машина самостоятельно перемещается
В 1949 году британский нейрофизиолог и изобретатель американского происхождения Уильям Грей Уолтер представил пару черепахообразных роботов с батарейным питанием, которые могли маневрировать вокруг объектов в комнате. , направлять себя к источнику света и находить путь обратно к зарядной станции, используя те же компоненты, которые по-прежнему имеют решающее значение для робототехники сегодня: сенсорную технологию, чувствительный контур обратной связи и логические рассуждения. Фото: доктор Ф. У. и Дж. Мерлин Клаттербак/Национальный музей американской истории.
1959
Первый манипулятор установлен на заводе
Первый промышленный манипулятор, известный как Unimate, начал работать на заводе General Motors, поднимая и укладывая горячие штампованные металлические детали. Созданный Джорджем Деволом и его партнером Джозефом Энгельбергером, он мог двигаться вверх и вниз по осям X и Y, обладал вращающимся захватом в виде клещей и мог следовать программе, состоящей из 200 движений, хранящихся в его памяти. Unimate, пригодный для выполнения множества задач, особенно тех, которые слишком обременительны или опасны для человека, например, подъем 75-килограммовых грузов без усталости и работы среди токсичных паров, положил начало превращению автомобильной промышленности в арену повсеместной автоматизации. Фото: Кавасаки.
Созданный Джорджем Деволом и его партнером Джозефом Энгельбергером, он мог двигаться вверх и вниз по осям X и Y, обладал вращающимся захватом в виде клещей и мог следовать программе, состоящей из 200 движений, хранящихся в его памяти. Unimate, пригодный для выполнения множества задач, особенно тех, которые слишком обременительны или опасны для человека, например, подъем 75-килограммовых грузов без усталости и работы среди токсичных паров, положил начало превращению автомобильной промышленности в арену повсеместной автоматизации. Фото: Кавасаки.
1969
Первый маленький шестиосевой робот с электроприводом
Роботы Unimate были большими и приводились в действие гидравликой, что приводило к протечкам и, таким образом, ограничивало возможности их использования. В 1969 году Виктор Шейнман сконструировал небольшую руку робота с шарнирами, приводимыми в действие электродвигателями, встроенными в саму руку. «Стэнфордская рука», как ее окрестили, когда Шейнман строил прототипы, могла двигаться гораздо быстрее, чем предыдущие роботы, и без путаницы в гидравлике. Это дало робототехнике возможность задуматься об использовании роботов в более сухих помещениях или даже на рабочих столах (первоначальный прототип весил всего 15 фунтов). У него также было шесть осей движения, или «шесть степеней свободы», что позволяло ему более точно приблизиться к радиусу действия человеческой руки. И это был первый робот-манипулятор, которым управляли не только пошаговые инструкции, хранящиеся в памяти, как в Unimate, но и программное обеспечение на компьютере. Это означало, что Stanford Arm мог выполнять вычисления в режиме реального времени, а в более поздних итерациях реагировать на окружающую среду (например, с помощью сенсорных датчиков или системы технического зрения). Началась эра быстроходных промышленных роботов с детальным компьютерным управлением. Фото: Les Earnest/Stanford Robotics Group
Это дало робототехнике возможность задуматься об использовании роботов в более сухих помещениях или даже на рабочих столах (первоначальный прототип весил всего 15 фунтов). У него также было шесть осей движения, или «шесть степеней свободы», что позволяло ему более точно приблизиться к радиусу действия человеческой руки. И это был первый робот-манипулятор, которым управляли не только пошаговые инструкции, хранящиеся в памяти, как в Unimate, но и программное обеспечение на компьютере. Это означало, что Stanford Arm мог выполнять вычисления в режиме реального времени, а в более поздних итерациях реагировать на окружающую среду (например, с помощью сенсорных датчиков или системы технического зрения). Началась эра быстроходных промышленных роботов с детальным компьютерным управлением. Фото: Les Earnest/Stanford Robotics Group
1972
Первый робот, использующий искусственный интеллект
Он был известен как Shakey из-за того, как он заикался, но что было самым отличительным в этом роботе, созданном группой инженеров из Стэнфордского исследовательского института, заключалась в том, что в нее входило новаторство. Если бы вы дали Шейки цель — например, пройти через комнату или толкнуть коробку по полу — он мог бы выполнить ее, наблюдая за окружающим миром, создавая план и выполняя его. С датчиками, включающими телевизионную камеру, дальномер и чувствительные к прикосновениям металлические усы, Шейки собирал данные, которые позволяли ему строить модель окружающей среды, а затем использовать программу «планирования», чтобы генерировать свои следующие шаги. Идея отдельного уровня «планирования» была настолько важной инновацией, что до сих пор занимает центральное место во многих роботизированных системах. Фото: Стэнфордская библиотека.
Если бы вы дали Шейки цель — например, пройти через комнату или толкнуть коробку по полу — он мог бы выполнить ее, наблюдая за окружающим миром, создавая план и выполняя его. С датчиками, включающими телевизионную камеру, дальномер и чувствительные к прикосновениям металлические усы, Шейки собирал данные, которые позволяли ему строить модель окружающей среды, а затем использовать программу «планирования», чтобы генерировать свои следующие шаги. Идея отдельного уровня «планирования» была настолько важной инновацией, что до сих пор занимает центральное место во многих роботизированных системах. Фото: Стэнфордская библиотека.
1978
Первый робот, работающий по принципу «возьми и помести»
Хотя шестиосевые руки в стиле Unimate могут поднимать тяжелые грузы и точно манипулировать ими, не все промышленные работы требуют силы. В 1978 году японский исследователь автоматизации Хироши Макино разработал четырехосную SCARA, или «робот-манипулятор с селективным соответствием», предназначенный для того, чтобы просто поднимать что-то, поворачивать и с точностью швырять куда-то еще — и все это одним плавным движением. . Это первый пример того, что стало известно как роботы «выбери и помести». Манипуляторы SCARA, как правило, менее гибкие и не такие прочные, как шестиосевые манипуляторы, но они намного быстрее и могут быстро вставлять на место небольшие электронные компоненты. Руки ускорили производство всего, от компьютерных чипов до часов, и до сих пор широко используются в мировом производстве. Фото: Университет Яманаси в Японии.
. Это первый пример того, что стало известно как роботы «выбери и помести». Манипуляторы SCARA, как правило, менее гибкие и не такие прочные, как шестиосевые манипуляторы, но они намного быстрее и могут быстро вставлять на место небольшие электронные компоненты. Руки ускорили производство всего, от компьютерных чипов до часов, и до сих пор широко используются в мировом производстве. Фото: Университет Яманаси в Японии.
Синтия Бризил считает, что если мы действительно собираемся работать вместе с роботами, доверять им и приглашать их в наши дома, роботы должны уметь читать эмоции людей и проявлять индивидуальность. Имея это в виду, она приступила к созданию Kismet, роботизированной головы, предназначенной для того, чтобы вызывать эмоции и реагировать на них. Двадцать один мотор управлял выразительной парой желтых бровей, красными губами, розовыми ушами и большими голубыми глазами, позволяя Кисмет выражать целый ряд эмоций, от счастья до скуки. Аудиосенсоры и алгоритмы улавливают тон голоса, поэтому робот будет выглядеть удрученным, если вы будете кричать на него, или любопытным, если вы будете говорить мягко.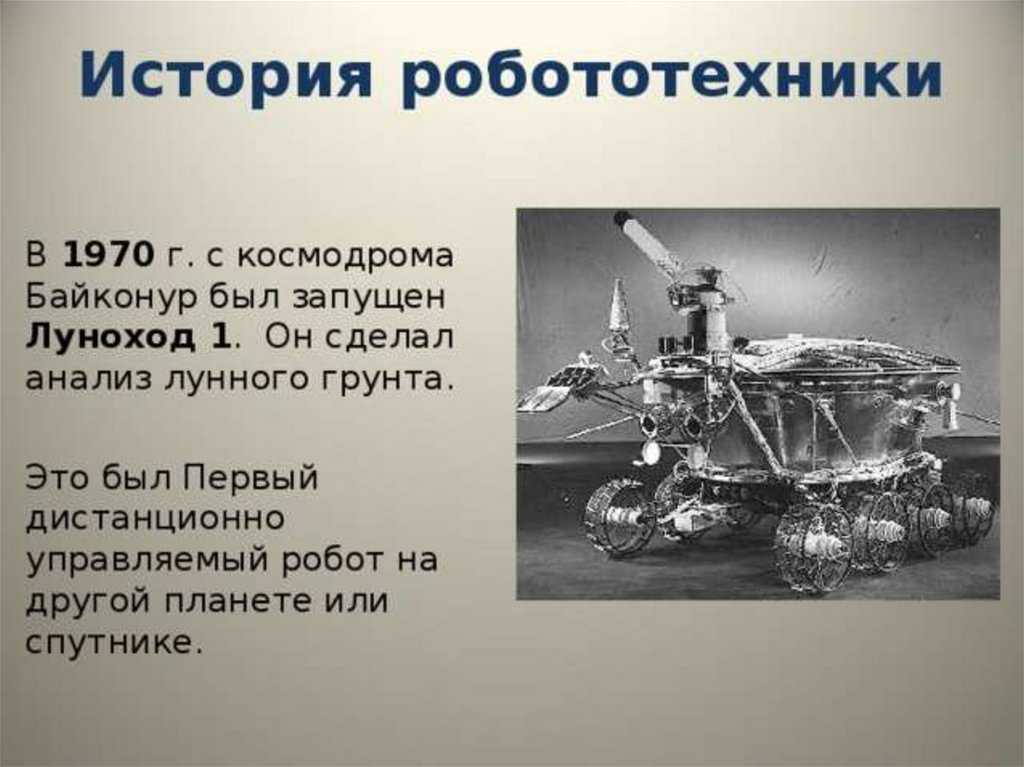 С Kismet Breazeal доказал липкость и привлекательность очаровательного робота, заложив основу для многих голосовых помощников, таких как Alexa, Siri и Google Home, которые теперь колонизируют дома по всему миру. Фото: Сэм Огден/Science Source.
С Kismet Breazeal доказал липкость и привлекательность очаровательного робота, заложив основу для многих голосовых помощников, таких как Alexa, Siri и Google Home, которые теперь колонизируют дома по всему миру. Фото: Сэм Огден/Science Source.
2002
Roomba вторгается в гостиные мира
Важнейшее нововведение iRobot, созданного группой исследователей из Массачусетского технологического института в 1990 году, стало результатом исследования, проведенного основателем для американских военных, когда они работали над роботом для проверить районы на наличие мин. Группа разработала алгоритм, который позволял роботу исследовать каждый квадратный метр заданного пространства. Удобно, что та же концепция работает как механизм управления роботом-пылесосом; комнаты должны быть подметены в их полном объеме. Roomba был первым функциональным роботом, который стал настоящим хитом у публики, продав 15 миллионов на сегодняшний день, доказывая, что, если робот достаточно полезен, не имеет значения, если это не полноценный «андроид» — люди будут приветствовать его. в их жизнь. Фото: Авентин.
в их жизнь. Фото: Авентин.
2003
Роботы Kiva модернизируют склад
В начале этого века Мику Маунцу пришла в голову идея: вместо того, чтобы сотрудники центра доставки находили и забирали товары на огромных складах, почему бы не использовать роботов для выполнения этой работы? Он и его соучредители создали робота Kiva: квадратного, близкого к земле оранжевого бота (не слишком отличающегося от очень большого Roomba), который может скользить по складам, перемещая стеллажи с товарами. Kiva использовала несколько недорогих готовых компонентов, которые могли сделать движения роботов менее точными, но инженеры Kiva компенсировали это программным обеспечением, которое корректировало курс на лету. Результатом стала автономная машина, которая была гораздо более гибкой в автоматизации склада, чем традиционная конвейерная система, и относительно проста в использовании. Система Kiva произвела революцию в эффективности складских операций и доставки. Amazon купила компанию за 775 миллионов долларов в 2012 году.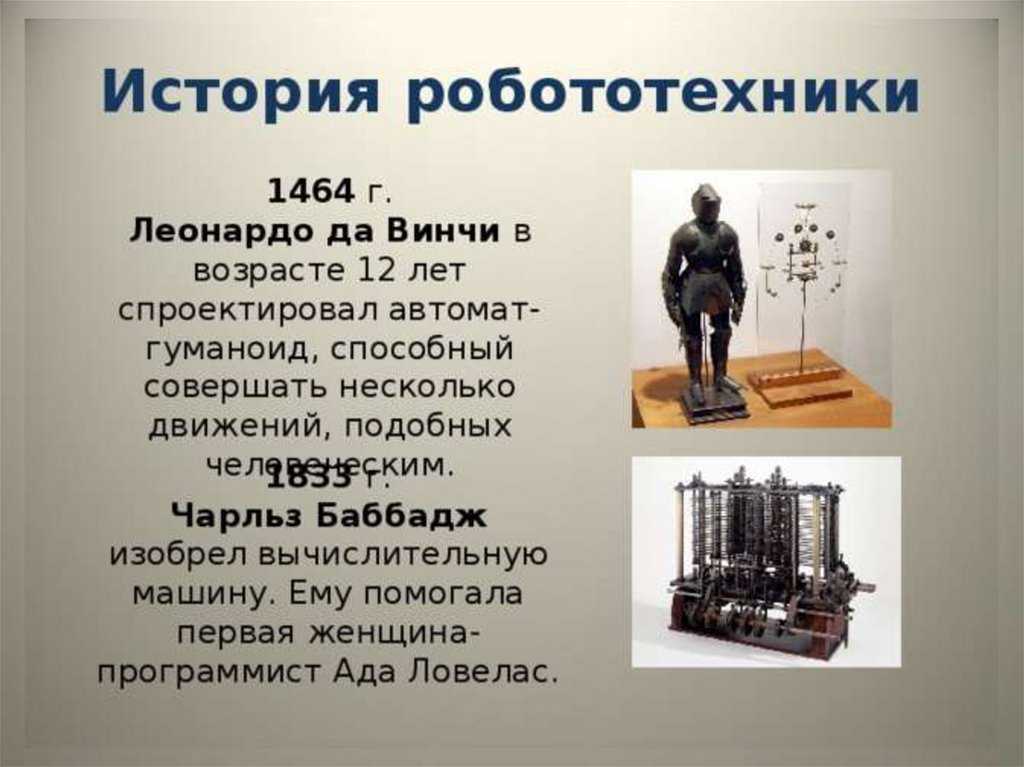 Фото: Getty Images.
Фото: Getty Images.
2004
«BigDog» бродит по грязи
«BigDog» от Boston Dynamics стал фаворитом YouTube благодаря своим жутко реалистичным выступлениям. В течение нескольких лет четвероногого робота можно увидеть пробирающимся по пересеченной местности — лиственным лесам, 60-градусным холмам, снегу по колено и грудам кирпичей. Он не полностью автономен; им управляет человек-контроллер, поэтому ему не нужна сложная система планирования и технического зрения. Зато у него есть 50 датчиков и бортовой компьютер, который управляет походкой и поддерживает ее стабильность. В частности, BigDog может подпрыгивать, касаясь земли только двумя футами за раз, что делает его гораздо более проворным, чем катящиеся роботы, которые обычно ограничены областями с плоскими поверхностями, такими как склады и тротуары. Мобильность BigDog указывает на то время, когда повседневные роботы массового производства могли легко перемещаться по лужайкам перед домом, бордюрам или лестницам, открывая новые возможности для всего: от доставки посылок до ухода за собой на дому. Фото: Credit Boston Dynamics.
Фото: Credit Boston Dynamics.
2005
Самоуправляемые автомобили прошли первое большое испытание
Современная эра беспилотных автомобилей началась 8 октября 2005 года, когда Volkswagen Touareg под названием «Stanley» выиграл второй Гранд-вызов DARPA. пройдите тяжелую и часто мучительную 131,2-мильную трассу в пустыне Мохаве за 10 часов. Гонка была организована в прошлом году Агентством перспективных оборонных исследовательских проектов (DARPA) Министерства обороны США, чтобы стимулировать конкуренцию и инновации в военных автономных транспортных средствах, но ни одна из машин, участвовавших в предыдущем соревновании, не смогла проехать более восьми миль. Победе Стэнли способствовал ряд улучшений, в том числе ИИ, обученный навыкам вождения реальных людей, и пять лазерных датчиков «Лидар» — технология, позволяющая автомобилю идентифицировать объекты в радиусе 25 метров перед автомобилем. . Лидар, что означает «обнаружение света и определение дальности», с тех пор стал ключевым компонентом роботизированных систем технического зрения в автомобилях и даже некоторых складских роботов типа Kiva; на самом деле, ведущая фирма по производству лидаров, Velodyne, была выделена из состава одного из конкурентов Стэнли в гонке.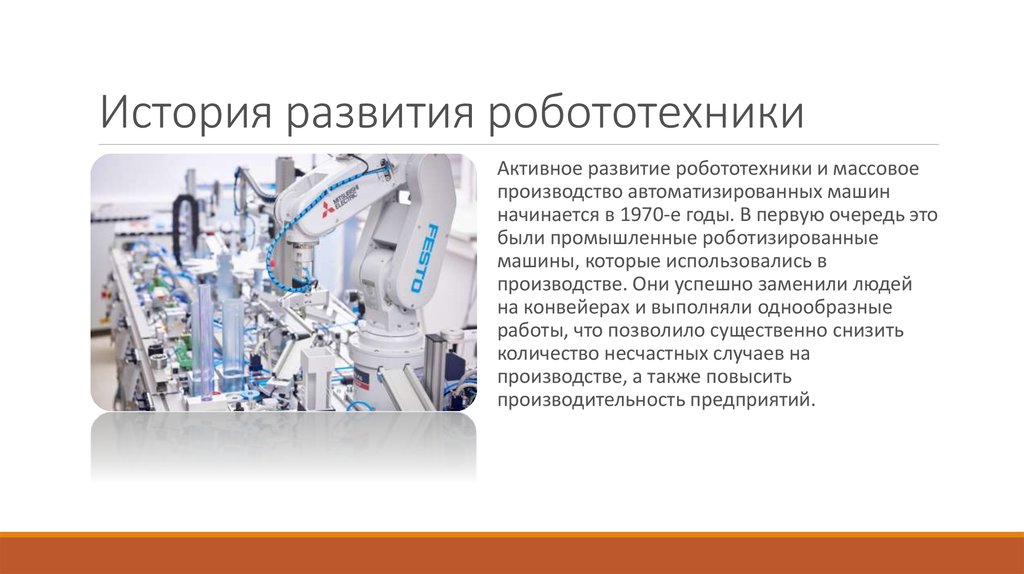 Фото: Стэнфордская гоночная команда.
Фото: Стэнфордская гоночная команда.
2012
Глубокое обучение набирает обороты
В 2012 году британский эксперт по искусственному интеллекту Джеффри Хинтон и небольшая команда из Университета Торонто добились ошеломляющего прогресса в области искусственного интеллекта, создав самую точную систему визуального распознавания. мир еще не видел. Он был и остается основанным на методе искусственного интеллекта, который позволяет компьютеру распознавать изображения посредством воздействия огромного количества фотографических данных. Концепция обучения существовала десятилетиями, но зачахла. Хинтон давно подозревал, что требуется гораздо больше вычислительной мощности и гораздо больше изображений для обучения, и к 2012 году он, наконец, осуществил свое желание благодаря огромному количеству цифровых изображений, внезапно доступных благодаря смартфонам и Интернету. В конкурсе ImageNet 2012 года команда Хинтона создала систему, которая могла идентифицировать и сортировать более миллиона изображений с коэффициентом ошибок всего 15,3 процента, что на 10 пунктов лучше, чем у ближайшего конкурента.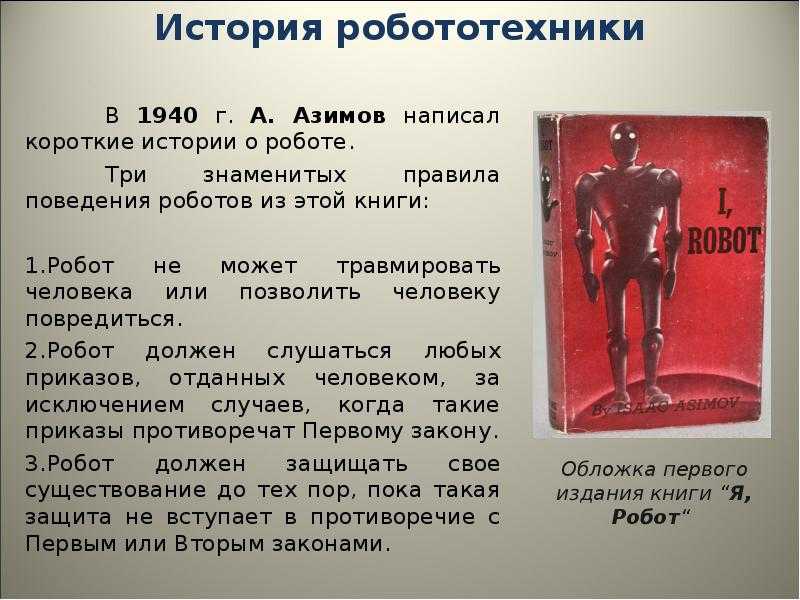 В течение нескольких месяцев компании, занимающиеся искусственным интеллектом, устремились к «глубокому обучению», а такие фирмы, как Google, выпускали инструменты с открытым исходным кодом, которые позволяли любому крошечному стартапу легко обучать нейронные сети. Благодаря Хинтону и его команде сегодня даже самые маленькие стартапы могут создавать роботов, которые распознают предметы повседневного обихода. Фото: Аарон Винсент Элкаим/The New York Times, через Redux.
В течение нескольких месяцев компании, занимающиеся искусственным интеллектом, устремились к «глубокому обучению», а такие фирмы, как Google, выпускали инструменты с открытым исходным кодом, которые позволяли любому крошечному стартапу легко обучать нейронные сети. Благодаря Хинтону и его команде сегодня даже самые маленькие стартапы могут создавать роботов, которые распознают предметы повседневного обихода. Фото: Аарон Винсент Элкаим/The New York Times, через Redux.
Джеффри Хинтон, чья команда совершила крупный прорыв в области глубокого обучения.
История робототехники для детей: знакомство с первыми роботами
Вы когда-нибудь хотели, чтобы домашнее задание выполнял робот? Люди всегда мечтали о машинах, автоматизирующих их работу. Роботы, автоматизированные машины, которые могут выполнять задачи с пониманием окружающей среды, прошли долгий путь. «Готовьтесь» к забавной истории, которая продолжает писаться! Сегодня мы собираемся исследовать историю робототехники для детей!
Откройте для себя историю ранней робототехники
1.
 Робот Леонардо
Робот Леонардо
Леонардо да Винчи был не только известным художником, но и известным своими изобретениями. В 1495 году да Винчи разработал план механического рыцаря по прозвищу «Робот Леонардо». Альбом для зарисовок был обнаружен в 1959 году, и воссозданные рисунки позволили создать рыцаря с приводом от шкива и троса, который мог сидеть, двигать руками и поднимать забрало. Неизвестно, действительно ли машина была создана при жизни да Винчи.
2. Производственные линии
С начала 1800-х годов сформировалась идея производственной линии. Эти производственные линии будут использовать некоторые автоматизированные механические машины для выполнения сложных задач. Такие машины, как хлопкоочистительная машина и жаккардовый ткацкий станок, ускорили производство ткани. Повышение эффективности работы на заводах стимулирует инновации в робототехнике и по сей день.
3. «Робот» используется
В 1921 году слово «робот» впервые появилось в чешской пьесе под названием R.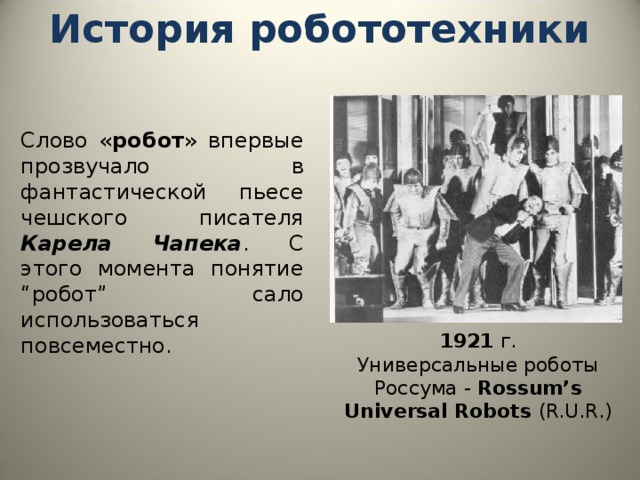 U.R — Rossum’s Universal Robots . Английское слово «робот» происходит от чешского слова «robota», что близко означает «подневольный рабочий» или «крепостной». Пьеса представляет собой фабрику человекоподобных машин, восставших против людей после переутомления.
U.R — Rossum’s Universal Robots . Английское слово «робот» происходит от чешского слова «robota», что близко означает «подневольный рабочий» или «крепостной». Пьеса представляет собой фабрику человекоподобных машин, восставших против людей после переутомления.
4. Роботы в художественной литературе
Идея захвата человечества машинами повлияла на многие другие произведения художественной литературы. Одним из них является серия рассказов и эссе Исаака Азимова « I, Робот ». В одном эссе 1942 года из этой серии Азимов сформулировал «Три закона робототехники»: робот не может причинить вред людям, робот должен всегда подчиняться людям, и робот должен пытаться защитить себя, если это не противоречит первым двум законам.
Узнайте об истории первых «настоящих» роботов
1. Unimate
В 1954 году Джордж Девол и Джозеф Энгельбергер запатентовали Unimate, первую промышленную роботизированную руку. Ружье было запущено в массовое производство в 1961 году и стало очень популярным. В 1966 году рука вместе с ее изобретателями была гостями на вечернем шоу NBC и выполняла такие трюки, как разливание напитков и дирижирование оркестром. Завод General Motors по производству оружия Unimate может сварить 110 каркасов автомобилей за один час, что более чем в два раза превышает скорость любого другого завода.
В 1966 году рука вместе с ее изобретателями была гостями на вечернем шоу NBC и выполняла такие трюки, как разливание напитков и дирижирование оркестром. Завод General Motors по производству оружия Unimate может сварить 110 каркасов автомобилей за один час, что более чем в два раза превышает скорость любого другого завода.
2. Первый робот, использующий ИИ
Первый робот, использующий искусственный интеллект (ИИ), был изобретен в 1972 году исследователями Стэнфордского университета. Робот «Shakey» использовал камеры и датчики, чтобы медленно кататься по комнате. Шейки мог даже следовать основным голосовым командам! Алгоритм искусственного интеллекта, который использовал Шейки, A *, до сих пор используется для распознавания текста и поиска маршрута.
3. Роботы-гуманоиды
В 1980-х годах Honda начала разрабатывать роботов-гуманоидов. Роботы-гуманоиды — это роботы, напоминающие людей и передвигающиеся на двух ногах. Создать робота, который может балансировать самостоятельно, сложно.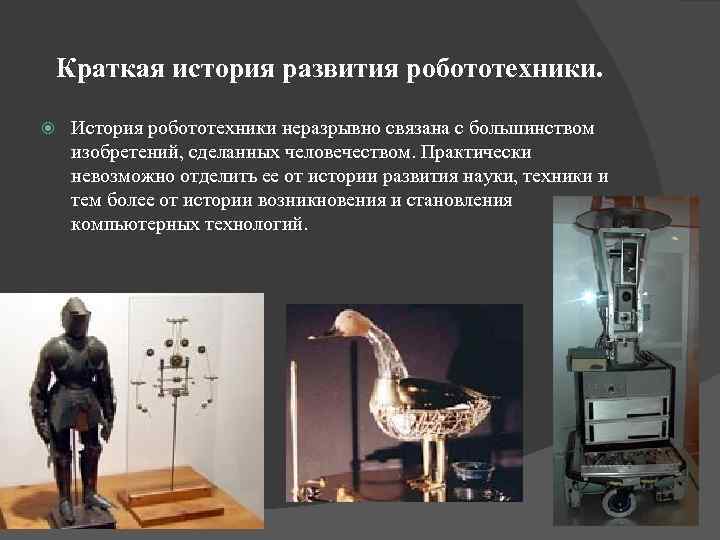 Самым известным гуманоидным роботом Honda был Asimo, представленный в 2000 году. Робот был ростом 4 фута 3 дюйма (1,3 метра) и мог ходить со скоростью 5,6 миль в час (9км/ч), подниматься по лестнице, прыгать на одной ноге и пинать футбольный мяч.
Самым известным гуманоидным роботом Honda был Asimo, представленный в 2000 году. Робот был ростом 4 фута 3 дюйма (1,3 метра) и мог ходить со скоростью 5,6 миль в час (9км/ч), подниматься по лестнице, прыгать на одной ноге и пинать футбольный мяч.
4. Первый игрушечный робот
Роботы всегда очаровывали детей. Первым игрушечным роботом был «Робот Роберт», появившийся в каталоге игрушек 1954 года. Как только компьютеры и роботы стали более доступными, стало доступно и образование в области робототехники. В 1998 году компания LEGO выпустила свой первый набор робототехники Mindstorms. По сей день многие дети знакомятся с робототехникой с помощью Lego. В 2005 году VEX провел свои первые национальные соревнования по робототехнике и продолжает оставаться одной из основных программ обучения робототехнике. Ваш ребенок может начать работу с робототехникой VEX на уроке «Приключения роботов» Create & Learn (4–8 классы) или на уроке робототехники для младших школьников (2–4 классы)!
Откройте для себя будущее робототехники
1.
 Хирургические роботы
Хирургические роботы
В 2000 году был выпущен первый хирургический робот Да Винчи. Этот робот был первым коммерчески доступным медицинским роботом, и он помог повысить точность врача при проведении операции благодаря более плавным движениям рук и более близким углам камеры. Медицинская робототехника продолжает оставаться горячей областью робототехники.
2. Роботы, имеющиеся в продаже
Раньше роботы были чем-то настолько продвинутым, что не использовались за пределами исследовательских или заводских установок. Однако в 2002 году группа бывших исследователей Массачусетского технологического института выпустила первого коммерчески доступного робота-пылесоса Roomba. По состоянию на 2020 год компания iRobot, стоящая за оригинальным Roomba, продала 30 миллионов домашних роботов.
3. Самоуправляемые автомобили
В 2004 году DARPA, отдел научных и инженерных исследований вооруженных сил США, провел грандиозный конкурс автономных автомобилей. Преодолев 115-мильную трассу через пустыню Калифорнии и Невады, ни одна из 15 машин не завершила первую гонку. На втором Гран-при, состоявшемся 18 месяцев спустя, гонку завершили пять из 195 автомобилей. Считается, что этот грандиозный вызов даст толчок исследованиям и разработкам в области беспилотных автомобилей.
На втором Гран-при, состоявшемся 18 месяцев спустя, гонку завершили пять из 195 автомобилей. Считается, что этот грандиозный вызов даст толчок исследованиям и разработкам в области беспилотных автомобилей.
4. Дроны
Дроны, небольшие летательные аппараты, уже много лет используются в военных целях. Однако эти дроны были довольно большими и использовались только военными. В 2006 году Федеральное авиационное управление США разрешило первое невоенное использование дронов для робота-распылителя пестицидов. С тех пор беспилотники стали использоваться в гражданских целях для доставки товаров и фотосъемки, и они продолжают оставаться захватывающим будущим для робототехники.
История робототехники указывает на захватывающее будущее
Если роботы так сильно улучшились за последние несколько десятилетий, представьте, что их ждет в будущем! Узнав об истории роботов, пришло время оставить свой след. Зарегистрируйтесь на курсы робототехники для детей и лагеря робототехники на Create & Learn уже сегодня!
Будущие статьи будут посвящены истории других технологий, таких как видеоигры, Интернет и сотовые телефоны.