Содержание
Как сделать робота киборга из лего
Всегда приятно творить что нибудь своими руками. для этого, собственно, и придуман конструктор лего. Если вам вдруг захочется что то построить из этих замечательных деталек, но вы не будете знать что к как из них можно сделать, смело можете заглядывать в эту статью.Далее мы расскажем и покажем вам как из подручных материалов можно сделать настоящих (это не шутка) роботов. Мы дадим вам наглядные примеры, посмотрев на которые вы сможете в дальнейшем создавать и свои, более грандиозные проекты.
Ну что, поехали. Начнем с простого.
Киборг
Сперва мы попробуем сделать небольшого, около 10-15 сантиметров, человекоподобного робота. Для этого понадобятся кое какие нестандартные детали, но раз уж вы захотели сделать робота, то без них не обойтись.
Киборги — это человекообразные роботы, они владеют оружием и умеют постоять за себя.
Робот в тяжелой броне
По тренеровавшись на простой модели робота можно переходить к задаче по сложнее. Для этого вам понадобятся дополнительные детали. Если вы обратите внимание на наше видео, приложенное ниже, то скорее всего вы поймете как можно собрать более интересного робота чем наш первый опыт. Этот образец оснащен сразу несколькими оружиями, которые вмонтированы прямо в руки.
Для этого вам понадобятся дополнительные детали. Если вы обратите внимание на наше видео, приложенное ниже, то скорее всего вы поймете как можно собрать более интересного робота чем наш первый опыт. Этот образец оснащен сразу несколькими оружиями, которые вмонтированы прямо в руки.
Его броня покрашена в черный цвет, с использованием вставок желто-зеленого цвета.
Скелет Терминатора
Этот пример является продуктом высшего класса. на создание этого робота ушло огромное количество не только деталек, но и труда.
Обратите внимание что все его конечности двигаются, а это значит что он не просто игрушка. Если вы не узнали в этих серых очертаниях терминатора, то это наверное потому, что в фильме этот металлический скелет обрел вид Арнольда Шварценеггера. Здесь же мы видит только чистый метал, ну или вернее пластик.
 youtube.com/embed/ih9aMJU_HHQ» frameborder=»0″ allowfullscreen=»allowfullscreen»>
youtube.com/embed/ih9aMJU_HHQ» frameborder=»0″ allowfullscreen=»allowfullscreen»>
Более сложные модели вам поможет собирать конструктор лего миндсторм.Благодаря электромоторам и блокам дистанционного управления простор фантазии практически не ограничен. Вы сможете собрать любое устройство, не только робота и програмировать его выполнять различные действия.
вот что делают люди с помощью этого набора:
Робот-тренога:
Видео работы:
Робот созданный по образу тех монстров из книги и фильма «Война миров».
Как сделать этого робота: вы можете скачать инструкцию и программу для постройки модели.
Скачать
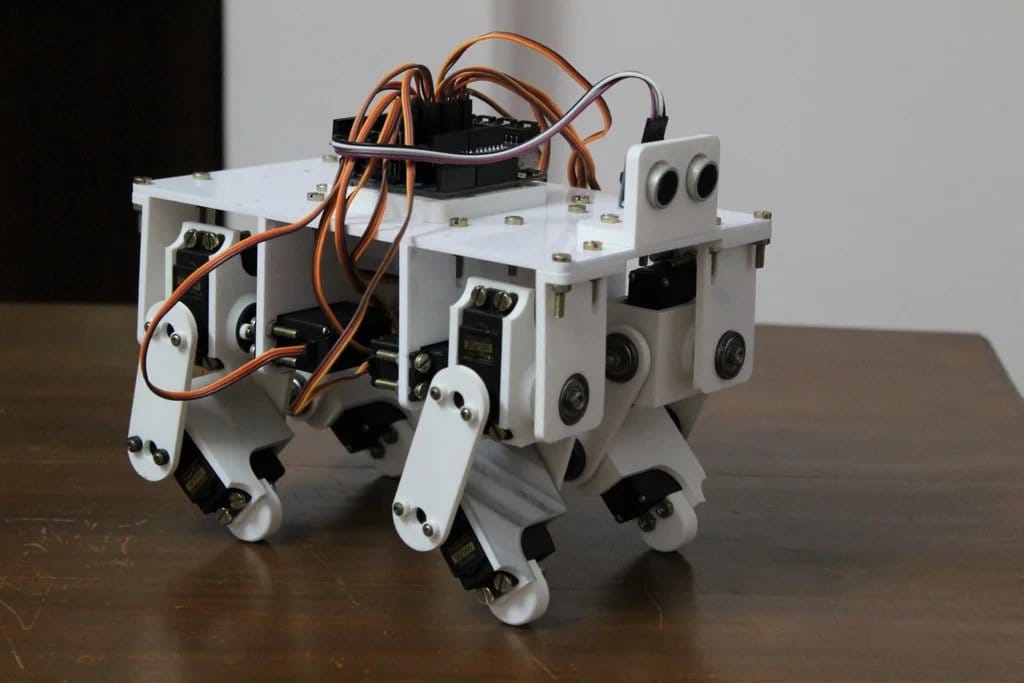
Двуногий робот
Видео работы:
Собрать его можно по инструкции из книги «создаём клевых роботов из Миндсторм»
Скачать книгу
Робот-мухоловка
Робот с огромной пастью, реагирует на движение и кусает нападающий объект.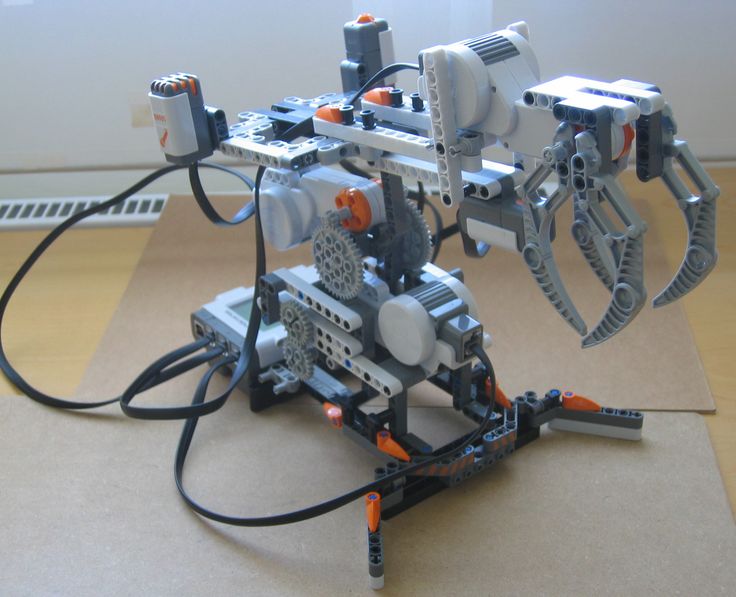
Видео:
Что бы собрать робота можно воспользоваться инструкцией:
Скачать
Вот таких замечательных роботов можно собирать из конструктора лего, удачи в вашем творчестве.
Посмотрите на робота-трансформера, который легко «переходит» с колес на ноги
Новости
7 декабря 2022
Далее
Александр
Шереметьев
новостной редактор
Александр
Шереметьев
новостной редактор
Инженеры разработали роботизированную систему, которая легко адаптируется к окружающей среде при перемещении.
Читайте «Хайтек» в
Исследователи из Вустерского политехнического института представили роботизированную систему OmniWheg. Она может адаптировать свою свою конфигурацию при перемещении по окружающей среде, плавно переходя от колесного робота к роботу на ногах.
Ключевая идея ученых заключается в том, что, хотя ноги делают роботов более привлекательными, придавая им черты человека или животного, они не всегда являются оптимальным решением при перемещении. Таким образом, вместо разработки робота с одним механизмом передвижения команда решила создать систему, которая может переключаться между различными механизмами.
В своей работе ученые использовали концепцию «whegs» (т. е. ноги-колеса или ноги-крылья), которая существует уже более десяти лет. Ранее было разработано и испытано несколько систем на подобной технологии, но большинство работали не очень хорошо, отмечают ученые. Главная проблема — трудности координации правой и левой стороны системы «колесо-нога», которые должны быть идеально выровнены, когда робот поднимается по лестнице.
Ранее было разработано и испытано несколько систем на подобной технологии, но большинство работали не очень хорошо, отмечают ученые. Главная проблема — трудности координации правой и левой стороны системы «колесо-нога», которые должны быть идеально выровнены, когда робот поднимается по лестнице.
Для решения проблем координации, обычно связанных с механизмами «колесо-нога», мы использовали всенаправленное колесо. Это последняя часть головоломки, поскольку она позволяет роботу выравниваться на лету, не вращая свое тело.
Жусян Цао, соавтор исследования
Исследователи протестировали свою систему в серии экспериментов. Например, устройству требовалось обойти препятствия, подняться по ступенькам с разной высотой и выполнять повороты и развороты в разных направлениях. Робот успешно справился со всеми задачами. Авторы работы отмечают, что новый робот может двигаться вперед, назад и в разные стороны с очень низкими затратами энергии. Кроме того, когда это необходимо он быстро поднимается по лестнице.
Устройство трансформируемого колеса. Изображение: Andre Rosendo and Ruixiang Cao
В будущем система, созданная инженерами, может быть интегрирована как в существующих, так и в новых роботов, чтобы повысить их эффективность при навигации в помещении.
Читать далее:
Водородная энергия, материал против холодов и биодобавки против COVID-19: что создают ученые на Севере
Яйцо сбросили из космоса: посмотрите, что с ним стало
«Ходячие мертвецы» существовали миллионы лет назад: ученые рассказали, как они появились
Читать ещё
Как строятся промышленные роботы? Руководство по компонентам и движению манипуляторов роботов| XYZ
Являются ли структуры роботов и людей одинаковыми?
Роботы и люди имеют общие черты. Люди и механические роботы — какими бы противоположными они ни казались, на самом деле они имеют одну и ту же базовую структуру звеньев (костей) и суставов. Основной скелет промышленных роботов, состоящий в основном из манипуляторов, представляет собой комбинацию звеньев и соединений. По отношению к человеческому телу части, которые могут свободно сгибаться и двигаться, такие как локоть и плечо, являются суставами, а кости, соединяющие эти суставы, эквивалентны звеньям робота. Принцип движения суставов и передачи энергии через звенья является общим как для людей, так и для роботов.
Основной скелет промышленных роботов, состоящий в основном из манипуляторов, представляет собой комбинацию звеньев и соединений. По отношению к человеческому телу части, которые могут свободно сгибаться и двигаться, такие как локоть и плечо, являются суставами, а кости, соединяющие эти суставы, эквивалентны звеньям робота. Принцип движения суставов и передачи энергии через звенья является общим как для людей, так и для роботов.
Локоть и плечо человека — это суставы, а соединяющие их кости — звенья.
Роботы можно условно разделить на два типа в зависимости от того, как устроены их соединения: 1) последовательное соединение и 2) параллельное соединение. Человеческая рука классифицируется как последовательное звено, поскольку ее суставы — плечо, рука и запястье — расположены последовательно.
Промышленные роботы подразделяются на несколько категорий, таких как вертикальный шарнирный тип и горизонтальный шарнирный тип (манипулятор робота с селективной податливостью SCARA), в зависимости от движений суставов и конструкции. Дополнительную информацию см. в статье ниже.
Дополнительную информацию см. в статье ниже.
Какие виды промышленных роботов существуют? Руководство по характеристикам основных 6 типов
В этой статье будет объяснено движение и внутреннее устройство промышленных роботов.
Сравнение движений робота и человека
Теперь давайте в качестве примера рассмотрим движение вертикального сочлененного типа, имеющего ту же механическую структуру, что и человеческая рука.
Вертикально-шарнирный робот представляет собой промышленный робот со структурой последовательной связи. Обычно он состоит из шести суставов (6 осей).
На следующем рисунке показано сравнение движения робота и человека.
Оси с 1-й по 3-ю — это талия и рука, а оси с 4-й по 6-ю — от запястья до кончиков пальцев. Первые три оси переносят запястье в определенное положение, а следующие три оси свободно перемещают запястье. Эта 6-осевая конструкция позволяет роботам свободно двигаться, как и людям.
Давайте проверим реальные движения на видео.
Все оси, с первой по шестую, двигаются как человек.
Что нужно для движения суставов?
Далее давайте подробно рассмотрим внутреннюю структуру промышленных роботов.
На приведенном ниже рисунке показана конструкция универсального робота малой и средней полезной нагрузки серии R от Kawasaki Heavy Industries или Kawasaki. Эта серия R используется в широком диапазоне областей, таких как сборка электронных устройств и дуговая сварка. Поскольку кабели и жгуты могут быть встроены внутрь руки, можно избежать взаимодействия с периферийным оборудованием, и робот может работать в небольшом пространстве. Его отличительной чертой является быстрая работа, которая может соответствовать проворным движениям.
На этом рисунке видно, что робот состоит из множества разных частей. Среди этих частей четыре особенно важные: привод, редуктор, энкодер и трансмиссия, каждая из которых будет объяснена отдельно.
Привод
Привод — это компонент, функционирующий как шарнир робота, который позволяет роботу перемещать руку вверх и вниз или вращаться, а также преобразовывать энергию в механические движения. Может быть трудно понять эту концепцию, но подумайте о двигателях в качестве примера. Точки, отмеченные красными кружками на рисунке ниже, являются положением двигателей серии R.
Однако, если это простой двигатель, такой как те, которые используются в комплектах пластиковых моделей, невозможно выполнить точную операцию, которая требует точных движений и точности, например, 0,01 мм. Поэтому для промышленных роботов используется высокофункциональный двигатель, называемый серводвигателем, который может управлять положением и скоростью.
Наиболее распространенным источником энергии для приводов является электричество, но также может использоваться гидравлическая и пневматическая энергия. Некоторые приводы с гидравлическим приводом уникальны тем, что они могут генерировать большую мощность и устойчивы к ударам.
Редуктор
Редуктор — это устройство для увеличения мощности двигателя. Один только двигатель ограничен по мощности, которую он может выдавать. Для получения большой мощности двигатели в основном используются в сочетании с этим редуктором. Области, обведенные синим цветом на следующем рисунке, представляют собой редукторы.
Если объединить зубчатые колеса с разным количеством передач и уменьшить скорость вращения двигателя в 10 раз, мощность двигателя увеличится в 10 раз. Это тот же принцип, что и в велосипедной трансмиссии. Велосипеды имеют разные по размеру шестерни на переднем и заднем колесе. Как правило, трансмиссия используется для переключения передач заднего колеса. Когда выбрана большая передача и количество оборотов колеса сведено к минимуму, крутить педали становится легче за счет скорости, но даже езда по крутым склонам становится гораздо менее сложной. Другими словами, выходная мощность может быть увеличена.
Энкодер
Энкодер — это устройство, которое указывает положение (угол) вращающегося вала двигателя. Имея энкодер, он может предоставить осязаемые данные о том, в каком направлении и сколько движется робот. У обычных оптических энкодеров диск прикреплен к вращающемуся валу двигателя. Диск имеет прорези через равные промежутки времени для пропускания света, а по обеим сторонам диска расположены светоизлучающие диоды (СИД) и светоприемные элементы (фотодиоды) для различения интенсивности света (светлый и темный).
Имея энкодер, он может предоставить осязаемые данные о том, в каком направлении и сколько движется робот. У обычных оптических энкодеров диск прикреплен к вращающемуся валу двигателя. Диск имеет прорези через равные промежутки времени для пропускания света, а по обеим сторонам диска расположены светоизлучающие диоды (СИД) и светоприемные элементы (фотодиоды) для различения интенсивности света (светлый и темный).
Когда двигатель вращается, свет либо проходит через щели, либо блокируется, поэтому угол поворота и скорость можно определить, считывая сигналы. Это позволяет серводвигателям точно контролировать позиционирование и скорость.
Трансмиссия
Трансмиссия — это компонент, передающий мощность, генерируемую исполнительными механизмами и редукторами. Трансмиссия также способна изменять направление и величину мощности. Как и прежде, рассматривая велосипед в качестве примера, цепь, соединяющая кривошип с задним колесом, является трансмиссией. Велосипеды приводятся в движение, принимая вращательное движение от педалей и передавая его на заднее колесо с помощью трансмиссии.
Эта идея также применима к конструкции робота. Двигатель, используемый в роботах, обычно размещается рядом с суставами, но его также можно разместить вдали от суставов с помощью передаточных механизмов, таких как ремни и шестерни. Например, в запястье роботов серии R, поскольку двигатель может быть установлен на локтевой части руки с помощью проводящего механизма, возможно компактное запястье.
Добавление функций с помощью сменного концевого зажима
Люди могут выполнять различные задачи с помощью инструментов. В случае с промышленными роботами замена устройства, прикрепленного к их запястью, делает роботов очень универсальными и позволяет им выполнять различные работы. Это устройство называется «концевой эффектор», и существует огромное количество готовых к использованию устройств, включая руки для подъема предметов, вакуумные (всасывающие) типы, а также инструменты для сварки и покраски. Робот может выполнять очень широкий спектр работ, сочетая гибкое движение, реализуемое валами роботов, и специальные концевые эффекторы.
В этой статье была подробно описана базовая структура промышленных роботов, и из нее мы узнали о компонентах, из которых построена конструкция, — где они расположены и какую роль играют. Люди могут подумать, что нет необходимости знать или узнавать о том, как устроен робот, при рассмотрении вопроса о внедрении роботов на рабочем месте. Однако наличие общего обзора поможет понять, например, какие виды движений и работ возможны, если посмотреть на количество осей, которые есть у робота, или на то, как робот может использоваться в компании. Для компаний, рассматривающих возможность обучения, подробная информация о каждом промышленном роботе и примеры применения доступны на веб-сайте Kawasaki Robot Division.
Промышленные роботы для гибкой автоматизации
Видеоролики по применению роботов
Когда дело доходит до фактического рассмотрения вопроса об установке роботов, даже небольшое знание конструкции и движений промышленных роботов может иметь большое значение и привести к более подходящей реализации.
Как работают роботы?
Вы можете думать о роботе как о машине, управляемой компьютерным приложением. Компоненты робота образуют две большие группы: аппаратное и программное обеспечение.
Аппаратное обеспечение
Аппаратное обеспечение робота включает корпус, двигатели и датчики.
Форма корпуса зависит от типа робота или области применения. Некоторые примеры тела робота включают роботов-гуманоидов, роботов только с руками, роботов только с ногами и колесных роботов. Корпус в основном покрыт металлом, пластиком или каким-либо другим материалом (например, углеродным волокном), который защищает внутреннюю часть робота. Важным аспектом защиты является то, что с каждым дополнительным граммом моторы и потребление энергии должны корректироваться.
Двигатели перемещают робота и его части. Существует несколько типов двигателей, которые применяются в робототехнике, включая двунаправленные шаговые двигатели, вращательные двигатели, насосы и вибрационные диски. Если у робота сложное тело, необходимо синхронизировать несколько двигателей. Синхронизация двигателей обычно выполняется в микромасштабе. Это означает, что управление моторами для определенных действий, таких как шаг вперед левой ногой или подъем правой руки, предопределено. Когда робот выполняет сложные задачи, последовательность этих предопределенных задач выполняется в произвольном порядке — таким образом, робот идет от А к Б или захватывает какой-то объект и приносит его в целевую область.
Если у робота сложное тело, необходимо синхронизировать несколько двигателей. Синхронизация двигателей обычно выполняется в микромасштабе. Это означает, что управление моторами для определенных действий, таких как шаг вперед левой ногой или подъем правой руки, предопределено. Когда робот выполняет сложные задачи, последовательность этих предопределенных задач выполняется в произвольном порядке — таким образом, робот идет от А к Б или захватывает какой-то объект и приносит его в целевую область.
Датчики используются для сбора данных об окружающей среде, которые затем могут быть обработаны компьютером, чтобы он мог понимать окружающую среду и выполнять соответствующие действия. В роботов может быть встроен широкий спектр датчиков, включая камеры, микрофоны, датчики давления, термометры, измерители влажности, датчики положения, датчики скорости, датчики местоположения и тактильные датчики, и это лишь некоторые из них.
Энергия нужна роботу — без нее робот не может двигаться и думать, что буквально означает запуск алгоритмов на компьютере. Источником энергии обычно является электричество, от электрической сети по проводам, от встроенного аккумулятора или от солнечной энергии. Иногда роботы работают на газе. Назначение робота обычно определяет, какой вариант лучше.
Источником энергии обычно является электричество, от электрической сети по проводам, от встроенного аккумулятора или от солнечной энергии. Иногда роботы работают на газе. Назначение робота обычно определяет, какой вариант лучше.
Программное обеспечение
Программное обеспечение управляет роботом. Без программного обеспечения робот не сможет работать. Во многих случаях программное обеспечение робота имеет параметры, которые можно установить, например, с помощью приложения для смартфона или с помощью специального устройства ввода, например кнопок.
Программное обеспечение может быть встроенным «зашитым» решением, которое нельзя изменить позже. Этот подход обычно используется в более старых или более простых роботах. В более совершенных решениях программное обеспечение можно обновлять удаленно через Интернет. Владелец робота может даже не заметить обновления. Возможность удаленного обновления или обновления программного обеспечения помогает разработчику робота вводить новые функции, улучшать обслуживание или исправлять возможные ошибки.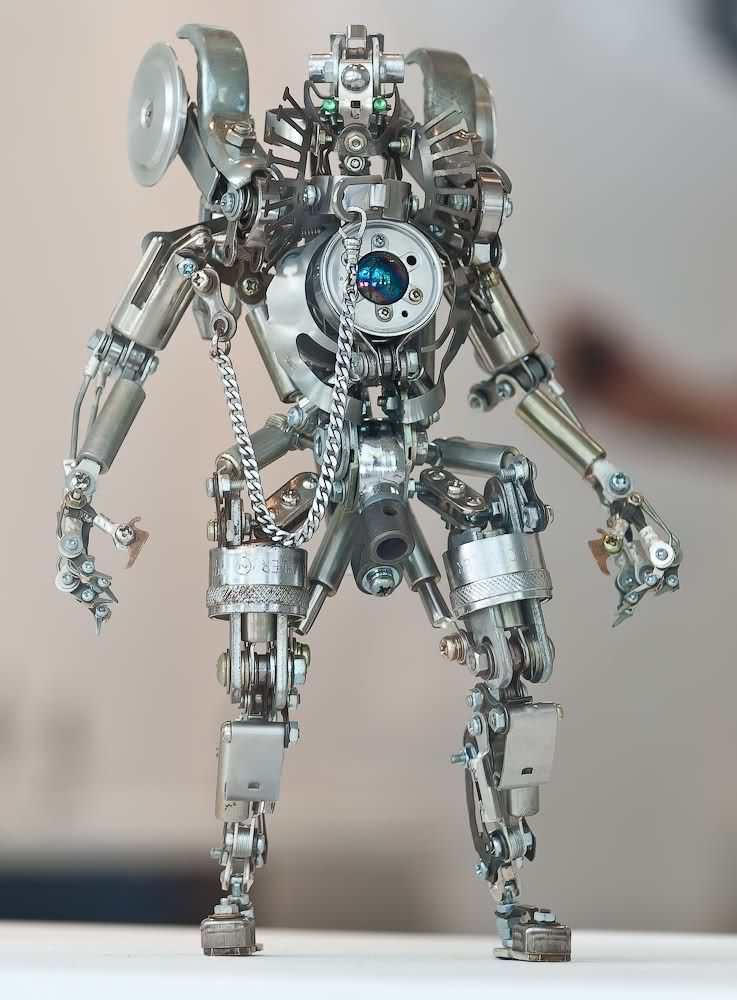 Третий тип программного обеспечения допускает незначительные или значительные модификации или даже позволяет разрабатывать программное обеспечение с нуля в случае роботов общего назначения, как обсуждалось ранее.
Третий тип программного обеспечения допускает незначительные или значительные модификации или даже позволяет разрабатывать программное обеспечение с нуля в случае роботов общего назначения, как обсуждалось ранее.
Робототехника и ИИ
ИИ становится основной программной технологией и, без сомнения, сыграет важную роль в будущем робототехники. Возможные области применения робототехники настолько богаты, что для разных роботов могут потребоваться разные методы ИИ.
Компьютерное зрение на основе искусственного интеллекта уже доказало свою эффективность во многих областях. Роботы с камерами, скорее всего, будут использовать искусственный интеллект для анализа изображений и видео. Это может включать обнаружение объектов на изображениях, измерение расстояний, распознавание объектов и людей и прогнозирование их движения, обнаружение опасностей и улучшение качества изображения камеры.
Обработка звука и речи — еще одна хорошо изученная область искусственного интеллекта. Следовательно, если у робота есть микрофон или микрофоны, с помощью алгоритмов ИИ можно записывать и анализировать звук и речь в окружающей среде. В зависимости от предметной области задачи могут включать в себя обнаружение голоса, распознавание речи, распознавание звука и событий, а также измерение отношения сигнал/шум, и это лишь некоторые из них. Роботы с динамиками могут использовать технологии преобразования текста в речь, чтобы передавать информацию пользователям голосом, похожим на человеческий.
Следовательно, если у робота есть микрофон или микрофоны, с помощью алгоритмов ИИ можно записывать и анализировать звук и речь в окружающей среде. В зависимости от предметной области задачи могут включать в себя обнаружение голоса, распознавание речи, распознавание звука и событий, а также измерение отношения сигнал/шум, и это лишь некоторые из них. Роботы с динамиками могут использовать технологии преобразования текста в речь, чтобы передавать информацию пользователям голосом, похожим на человеческий.
Роботы, особенно социальные роботы, используют камеру, микрофон и динамики, чтобы понимать свое окружение. Благодаря передовым алгоритмам обработки естественного языка и речевым технологиям роботы могут общаться с людьми, иногда даже способом, напоминающим общий интеллект. Поскольку эти передовые алгоритмы ИИ требуют огромной вычислительной мощности компьютера, некоторые роботы запускают эти алгоритмы в облаке.
Роботы, которые собирают данные с датчиков (расстояния, силы, силы тока, напряжения, температуры или влажности и даже камер и микрофонов), могут использовать алгоритмы ИИ для обнаружения самых первых признаков возможных сбоев.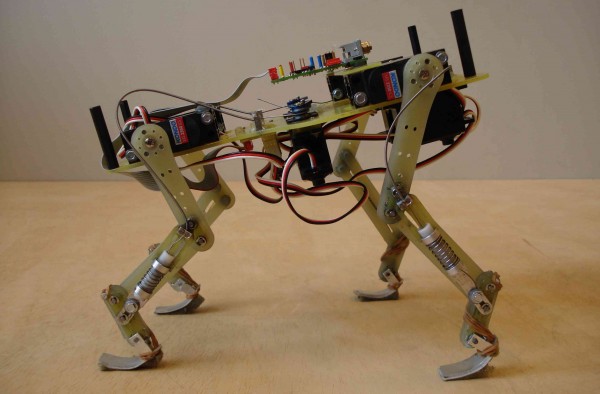 Это означает, что эти роботы могут останавливать работу, чтобы предотвратить сбои, или могут указать, что необходимо техническое обслуживание, прежде чем возникнут более серьезные проблемы (также называемое профилактическим обслуживанием). Оба подхода необходимы в производстве и сельском хозяйстве, чтобы избежать дефектных продуктов и товаров или более длительных простоев.
Это означает, что эти роботы могут останавливать работу, чтобы предотвратить сбои, или могут указать, что необходимо техническое обслуживание, прежде чем возникнут более серьезные проблемы (также называемое профилактическим обслуживанием). Оба подхода необходимы в производстве и сельском хозяйстве, чтобы избежать дефектных продуктов и товаров или более длительных простоев.
Движение и стабильность роботов также можно оптимизировать с помощью алгоритмов ИИ для лучшей адаптации к среде, в которой перемещается робот, и к объектам, с которыми взаимодействует робот. Иногда это можно сделать даже в среде моделирования перед использованием робота, а затем программное обеспечение, созданное в этой среде моделирования, адаптируется к реальному миру.
Это общие решения для робототехники и ИИ, однако возможности выходят далеко за рамки этих примеров. Поскольку робототехника и искусственный интеллект являются новыми технологиями, в будущем, вероятно, будут разработаны новые интересные интеллектуальные решения.