Содержание
Как сделать своими руками дрон на Ардуино Уно
Дрон — очень дорогой гаджет. Как собрать квадрокоптер самому в домашних условиях? В этой инструкции я собираюсь рассказать, как сделать своими руками квадрокоптер по дешевке. Рама коптера и контроллер полета — самодельные. Конструкция сборки доступна даже для начинающих.
Рама состоит из алюминиевой антенны (штанги), лопасти вентилятора из алюминиевого плафона и дерева. Arduino UNO наряду с MPU6050 (гироскоп + Accle) используется в качестве контроллера полёта.
Шаг 1: Материалы
Показать еще 11 изображений
Это материалы, которые используются для моего дрона. Вы можете использовать любые детали / материалы по вашему усмотрению. Если вы хотите сделать его максимально дешевым, то можете воспользоваться списком материалов ниже.
Ссылки на Амазон:
- Flysky fs-i6x с ресивером X6B
- Батарейка Li-po 11.
 1v, лучше взять эту
1v, лучше взять эту - Зарядник Li-Po
- Arduino UNO
- Гироскоп и акселерометр Mpu6050
- Макетная плата
- Коннетор XT60
- Передатчик и ресивер
- устройство для контроля напряжения Li-Po
 1v, лучше взять эту
1v, лучше взять этуСписок со ссылками на banggood:
- Передатчик и ресивер
- Бесщеточный двигатель
- 30 Amp ESC
- Li-Po батарейка
- Зарядное устройство Li-Po
- Контроллер напряжения Lipo
- Arduino uno
- MPU6050
- XT60 коннектор
- Пропеллер 1045
Ссылки на gearbest:
- Flysky fs-i6x с ресивером X6B
- Батарейка Li-po 11.1v
- Контроллер напряжения Lipo
- Зарядник Li-Po
- Arduino UNO
- Гироскоп и акселерометр Mpu6050
- Коннетор XT60
- Вентильный двигатель CW
- Вентильный двигатель CCW
- 4*30Amp ESCs
- Пропеллер 1045
- Термоусадочная трубка
Шаг 2: Установка моторов
Когда вы покупаете моторы, крепление мотора и несколько винтов входят в комплект. Крепление алюминиевого мотора с винтами идет с ним. (см. рисунок). Установите его на двигатель, используя винты.
Крепление алюминиевого мотора с винтами идет с ним. (см. рисунок). Установите его на двигатель, используя винты.
Шаг 3: Делаем раму
Показать еще 3 изображения
Я использую старую алюминиевую антенну, мягкое дерево и алюминиевую пластину (лопасть вентилятора), чтобы сделать каркас. Отрежьте 4 куска алюминиевого бруска по 20см. Размер центральной пластины составляет около 11 * 18 см…. Деревянное крепление для двигателя имеет длину около 10 см и диаметр 4,5 см (там, где установлен двигатель).
Закрепите алюминиевые стержни с помощью центральной пластины с помощью винтов и вставьте крепление двигателя под алюминиевые стержни. Ваша рама готова (см. видео).
Шаг 4: Устанавливаем все компоненты (ESC и моторы на раму)
Показать еще 4 изображения
Теперь прикрепите моторы к деревянному креплению с помощью винтов и гаек (любых типов) и соедините с ними провод ESC (произвольно), зафиксируйте ESC с помощью изоленты или стяжек, в моем случае это изолента (дешевле, чем стяжки). После подключения всех моторов и ESC отрежьте провода ESC +ve и –ve и подключите все ESC с помощью проводов или PDB. Я использую провода, потому что в моей раме нет места для ESC. Всё готово.
После подключения всех моторов и ESC отрежьте провода ESC +ve и –ve и подключите все ESC с помощью проводов или PDB. Я использую провода, потому что в моей раме нет места для ESC. Всё готово.
Шаг 5: Контроллер полёта
Показать еще 4 изображения
На основе Ардуино Уно и MPU6050, создайте контроллер полёта.
Мой контроллер основан на Joop Brokking’s YMFC-AL и его автоуровневом квадрокоптере. Соедините все согласно диаграмме.
Шаг 6: Соединяем ESC и ресивер с контроллером полёта
*** Не соединяйте BEC-провод ESC (5 вольт), соединяйте лишь сигнальный провод
*** Запитывайте ресивер от 5вольтового источника Ардуино
Соединение ESC:
- Цифровой пин-4 к ESC1 (правый передний CCW)
- Цифровой пин-5 к ESC2 (правый задний CW)
- Цифровой пин-6 к ESC3 (левый задний CCW)
- Цифровой пин-7 к ESC4 (левый передний CW)
Соединение ресивера:
- Цифровой пин-8 к каналу 1 ресивера
- Цифровой пин-9 к каналу 2 ресивера
- Цифровой пин-10 к каналу 3 ресивера
- Цифровой пин-11 к каналу 4 ресивера
Шаг 7: Настройка контроллера полёта (загрузка скетча)
Показать еще 4 изображения
*** На этом этапе не подключайте лётную батарею
Теперь загрузите Arduino IDE и приложенный скетч и извлеките файл. Вы найдете схемы YMFC-Al, файл Readme, код калибровки ESC, код настройки и код контроллера полета.
Вы найдете схемы YMFC-Al, файл Readme, код калибровки ESC, код настройки и код контроллера полета.
Arduino IDE
Скетч контроллера полета
Сначала загрузите код и откройте последовательный монитор на 56000b и следуйте инструкциям в видео
Если ошибки не возникло, загрузите скетч калибровки ESC после загрузки кода. Поставьте передатчик на полную мощность и подключите летную батарею после нескольких звуковых сигналов, выключите дроссель (я думаю, что этот метод работает не для всех типов и марок ESC, но у меня это работает отлично).
После загрузки скетча калибровки ESC загрузите скетч контроллера полета и Ваш FC готов.
Файлы
- YMFC-AL.zip
Шаг 8: Установка электроники в кейс и монтаж
Показать еще 11 изображений
После завершения всех работ по соединению электрокомпонентов, положите всю электронику в коробку и завершите всю проводку. Теперь установите винты CCW на двигатели CCW и винты CW на двигатели CW. Вы готовы к полету.
Теперь установите винты CCW на двигатели CCW и винты CW на двигатели CW. Вы готовы к полету.
Самое сложное в создании этого квадрокоптера — настройка PID. Я сломал 2 пары пропеллеров и коробку с электроникой, пытаясь научиться летать на ней.
Как сделать своими руками дрон на Ардуино Уно
Дрон — очень дорогой гаджет. Как собрать квадрокоптер самому в домашних условиях? В этой инструкции я собираюсь рассказать, как сделать своими руками квадрокоптер по дешевке. Рама коптера и контроллер полета — самодельные. Конструкция сборки доступна даже для начинающих.
Рама состоит из алюминиевой антенны (штанги), лопасти вентилятора из алюминиевого плафона и дерева. Arduino UNO наряду с MPU6050 (гироскоп + Accle) используется в качестве контроллера полёта.
Шаг 1: Материалы
Показать еще 11 изображений
Это материалы, которые используются для моего дрона.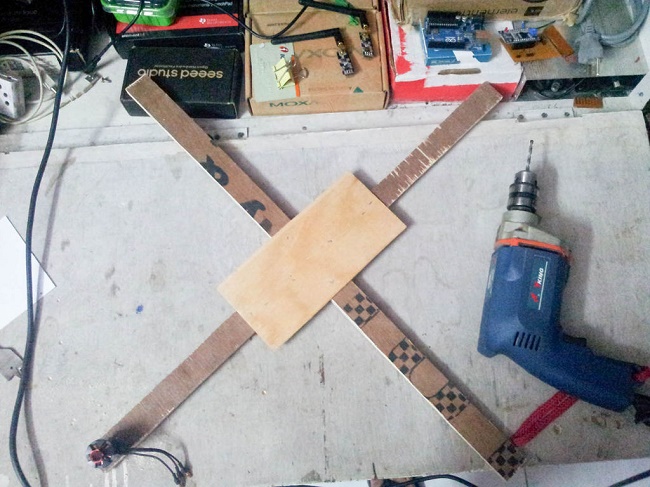 Вы можете использовать любые детали / материалы по вашему усмотрению. Если вы хотите сделать его максимально дешевым, то можете воспользоваться списком материалов ниже.
Вы можете использовать любые детали / материалы по вашему усмотрению. Если вы хотите сделать его максимально дешевым, то можете воспользоваться списком материалов ниже.
Ссылки на Амазон:
- Flysky fs-i6x с ресивером X6B
- Батарейка Li-po 11.1v, лучше взять эту
- Зарядник Li-Po
- Arduino UNO
- Гироскоп и акселерометр Mpu6050
- Макетная плата
- Коннетор XT60
- Передатчик и ресивер
- устройство для контроля напряжения Li-Po
Список со ссылками на banggood:
- Передатчик и ресивер
- Бесщеточный двигатель
- 30 Amp ESC
- Li-Po батарейка
- Зарядное устройство Li-Po
- Контроллер напряжения Lipo
- Arduino uno
- MPU6050
- XT60 коннектор
- Пропеллер 1045
Ссылки на gearbest:
- Flysky fs-i6x с ресивером X6B
- Батарейка Li-po 11.1v
- Контроллер напряжения Lipo
- Зарядник Li-Po
- Arduino UNO
- Гироскоп и акселерометр Mpu6050
- Коннетор XT60
- Вентильный двигатель CW
- Вентильный двигатель CCW
- 4*30Amp ESCs
- Пропеллер 1045
- Термоусадочная трубка
Шаг 2: Установка моторов
Когда вы покупаете моторы, крепление мотора и несколько винтов входят в комплект. Крепление алюминиевого мотора с винтами идет с ним. (см. рисунок). Установите его на двигатель, используя винты.
Крепление алюминиевого мотора с винтами идет с ним. (см. рисунок). Установите его на двигатель, используя винты.
Шаг 3: Делаем раму
Показать еще 3 изображения
Я использую старую алюминиевую антенну, мягкое дерево и алюминиевую пластину (лопасть вентилятора), чтобы сделать каркас. Отрежьте 4 куска алюминиевого бруска по 20см. Размер центральной пластины составляет около 11 * 18 см…. Деревянное крепление для двигателя имеет длину около 10 см и диаметр 4,5 см (там, где установлен двигатель).
Закрепите алюминиевые стержни с помощью центральной пластины с помощью винтов и вставьте крепление двигателя под алюминиевые стержни. Ваша рама готова (см. видео).
Шаг 4: Устанавливаем все компоненты (ESC и моторы на раму)
Показать еще 4 изображения
Теперь прикрепите моторы к деревянному креплению с помощью винтов и гаек (любых типов) и соедините с ними провод ESC (произвольно), зафиксируйте ESC с помощью изоленты или стяжек, в моем случае это изолента (дешевле, чем стяжки). После подключения всех моторов и ESC отрежьте провода ESC +ve и –ve и подключите все ESC с помощью проводов или PDB. Я использую провода, потому что в моей раме нет места для ESC. Всё готово.
После подключения всех моторов и ESC отрежьте провода ESC +ve и –ve и подключите все ESC с помощью проводов или PDB. Я использую провода, потому что в моей раме нет места для ESC. Всё готово.
Шаг 5: Контроллер полёта
Показать еще 4 изображения
На основе Ардуино Уно и MPU6050, создайте контроллер полёта.
Мой контроллер основан на Joop Brokking’s YMFC-AL и его автоуровневом квадрокоптере. Соедините все согласно диаграмме.
Шаг 6: Соединяем ESC и ресивер с контроллером полёта
*** Не соединяйте BEC-провод ESC (5 вольт), соединяйте лишь сигнальный провод
*** Запитывайте ресивер от 5вольтового источника Ардуино
Соединение ESC:
- Цифровой пин-4 к ESC1 (правый передний CCW)
- Цифровой пин-5 к ESC2 (правый задний CW)
- Цифровой пин-6 к ESC3 (левый задний CCW)
- Цифровой пин-7 к ESC4 (левый передний CW)
Соединение ресивера:
- Цифровой пин-8 к каналу 1 ресивера
- Цифровой пин-9 к каналу 2 ресивера
- Цифровой пин-10 к каналу 3 ресивера
- Цифровой пин-11 к каналу 4 ресивера
Шаг 7: Настройка контроллера полёта (загрузка скетча)
Показать еще 4 изображения
*** На этом этапе не подключайте лётную батарею
Теперь загрузите Arduino IDE и приложенный скетч и извлеките файл. Вы найдете схемы YMFC-Al, файл Readme, код калибровки ESC, код настройки и код контроллера полета.
Вы найдете схемы YMFC-Al, файл Readme, код калибровки ESC, код настройки и код контроллера полета.
Arduino IDE
Скетч контроллера полета
Сначала загрузите код и откройте последовательный монитор на 56000b и следуйте инструкциям в видео
Если ошибки не возникло, загрузите скетч калибровки ESC после загрузки кода. Поставьте передатчик на полную мощность и подключите летную батарею после нескольких звуковых сигналов, выключите дроссель (я думаю, что этот метод работает не для всех типов и марок ESC, но у меня это работает отлично).
После загрузки скетча калибровки ESC загрузите скетч контроллера полета и Ваш FC готов.
Файлы
- YMFC-AL.zip
Шаг 8: Установка электроники в кейс и монтаж
Показать еще 11 изображений
После завершения всех работ по соединению электрокомпонентов, положите всю электронику в коробку и завершите всю проводку. Теперь установите винты CCW на двигатели CCW и винты CW на двигатели CW. Вы готовы к полету.
Теперь установите винты CCW на двигатели CCW и винты CW на двигатели CW. Вы готовы к полету.
Самое сложное в создании этого квадрокоптера — настройка PID. Я сломал 2 пары пропеллеров и коробку с электроникой, пытаясь научиться летать на ней.
Узнайте, как создать собственный дрон с нуля
Я знаю, о чем вы думаете. Много слов, и я даже не уверен, что эта страница именно то, что я ищу . Позвольте мне подытожить:
Если вы хотите узнать, как построить свой собственный дрон, вы находитесь в правильном месте. Есть много типов людей, которые могут быть заинтересованы в этом новом мире дронов. Тем не менее, это руководство предназначено для ботаников (и я имею в виду это как комплимент).
Если вы один из этих любителей (эвфемизм для ботаника), позвольте мне быть вашим проводником в вашем путешествии по созданию самодельного дрона. Думай обо мне как о Гэндальфе, а о себе как о Фродо. Это слишком удачная аналогия, так как ваше новое увлечение дроном может превратиться в зависимость, как кольцо, которое вы никогда не захотите снимать. Так что будьте осторожны. Я отвлекся.
Так что будьте осторожны. Я отвлекся.
Это руководство основано на моем курсе по созданию собственного дрона. Если вы хотите узнать больше об этом предмете, курс включает 6 часов видеолекций в структурированном учебном плане.
Это идеальный курс для студентов колледжей и владельцев дронов, а также для тех, кто занимается самоделкой и интересуется летающими роботами. Студенты использовали этот курс в качестве стартовой площадки для создания своих собственных приложений для дронов, поэтому я настоятельно рекомендую ознакомиться с ним, если вы пытаетесь разработать новую инновацию в области дронов.
Но я отвлекся 🙂
Прочитав это пошаговое руководство, вы узнаете:
- Все детали, необходимые для управления дроном
- Как найти свои собственные детали, чтобы сделать свой собственный дрон . Таким образом, предварительно собранный комплект для дрона не требуется
- Как собрать детали, которые вы выбрали
Как показано в пункте 2, это руководство вооружит вас знаниями, позволяющими находить собственные детали, а не просто спаивать электронику из готового комплекта. собранный список деталей, которые входят в комплект дрона. Как говорится «Дай женщине рыбу, она будет сыта один день. Но научите женщину ловить рыбу, и она будет сыта всю жизнь», или что-то в этом роде.
собранный список деталей, которые входят в комплект дрона. Как говорится «Дай женщине рыбу, она будет сыта один день. Но научите женщину ловить рыбу, и она будет сыта всю жизнь», или что-то в этом роде.
Возможно, у вас уже есть дрон определенного типа, который вы хотели бы построить, например, небольшой квадрокоптер FPV или более крупный октокоптер для подъема полезной нагрузки. Прелесть хобби с дроном заключается в том, что анатомия дрона практически одинакова для любого типа дрона, который вы хотите построить.
Имея это в виду, данное руководство намеренно написано в общем виде, поэтому его можно использовать в качестве справочника для любого типа дронов.
Если вы хотите собрать дрон, описанный в этом руководстве, ознакомьтесь с этим 9Список деталей 0017 Raspberry Pi Drone .
А теперь приступим к созданию самодельных дронов!
Хотите быть в курсе будущих проектов беспилотных летательных аппаратов? Зарегистрируйтесь ниже и никогда не пропустите.
Основные инструменты, необходимые для сборки дрона
- Паяльник и припой (обязательно): Вам понадобится паяльник для сборки некоторых частей вашего дрона.
- Руки помощи (дополнительно): Руки помощи помогут вам оставаться в здравом уме, пока вы пытаетесь паять. Они в основном удерживают часть, которую нужно припаять, на месте.
- Мультиметр (дополнительно): Мультиметр — это просто хороший инструмент, который должен быть в вашем наборе инструментов, и он может очень помочь в диагностике любых проблем с электричеством, которые могут возникнуть с вашим дроном
- Двусторонняя клейкая лента ( Требуется): Это едва ли не самая важная часть для сборки любого дрона, и я просто шучу. Вы будете закреплять многие детали на раме просто с помощью двустороннего скотча.
- Липучка (обязательно): Полоска липучки очень удобна для крепления липо-аккумулятора к раме.
- Застежки-молнии (обязательно): Некоторое оборудование дрона легче прикрепить к раме с помощью простых застежек-молний, таких как ESC (см. ниже).
- Термоусадка или изолента (обязательно): Ваши моторы и регуляторы скорости, вероятно, будут соединены с помощью цилиндрических разъемов (дополнительные сведения см. ниже). Если эти металлические разъемы соприкоснутся во время полета, в цепи произойдет короткое замыкание, и ваш дрон, вероятно, упадет на землю. Избегайте этого ужаса, поместив изолятор вокруг металлических соединителей пуль.
Основные части дрона для самодельного дрона
Рама
При выборе рамы вашего дрона необходимо учитывать два основных момента. Во-первых, сколько рук. Каждая рука обычно имеет один двигатель, который будет иметь один пропеллер. По этой причине дроны с несколькими двигателями называются просто «мультироторы».
Трикоптер: дрон с тремя двигателями.
Quadcopter: Дрон с четырьмя двигателями.
Гексакоптер: дрон с шестью двигателями.
Octocopter: дрон с восемью двигателями.
Квадрокоптеры, безусловно, самые популярные, поэтому в этом руководстве мы сосредоточимся на том, как сделать квадрокоптер.
Второе, что нужно знать о фреймах, это их размер. В размерах рамы указывается максимальное расстояние, на котором два двигателя находятся друг от друга. Для квадрокоптеров это обычно означает измерение расстояния между двумя диагональными двигателями в миллиметрах (извините, американцы).
Nano Drone: 80-100 мм
Micro Дрон: 100-150 мм
Малый Дрон: 150-250 мм
Средний Дрон: 250-400 мм
Большой Дрон: 9000+ 9005 9005 мм. , выбор размера кадра будет вашим первым шагом.
Двигатели
Существует два основных типа двигателей: щеточные и бесщеточные. Ваши более дешевые готовые к полету дроны будут использовать коллекторные двигатели, и это потому, что они используют более дешевый двигатель. Несмотря на дешевизну, они изнашиваются и ломаются намного быстрее, чем бесколлекторные двигатели. Бесщеточные двигатели служат намного дольше и являются предпочтительным выбором для сборки дронов своими руками.
Несмотря на дешевизну, они изнашиваются и ломаются намного быстрее, чем бесколлекторные двигатели. Бесщеточные двигатели служат намного дольше и являются предпочтительным выбором для сборки дронов своими руками.
Существует бесчисленное множество бесколлекторных двигателей. Чтобы помочь вам определить, какой двигатель лучше всего подойдет для вашей сборки, большинство производителей предоставляют вам некоторую информацию о продукте. Двумя наиболее распространенными характеристиками являются размер и рейтинг KV.
Рассмотрим конкретный пример.
Бесколлекторный двигатель: 2213 935KV
Здесь размер двигателя 2213. Это действительно представляет два числа и должно быть показано так: 22-13.
22 — это ширина статора в мм, а 13 — высота ротора в мм. Как правило, чем шире ширина, тем больше крутящий момент у двигателя.
Еще одна характеристика бесколлекторных двигателей — рейтинг KV. На нашем примере двигателей это 935кВ. Не путайте кВ с киловольтами. Здесь рейтинг KV означает число оборотов в минуту на один входной вольт.
Итак, если мы подадим 1 вольт на двигатель 935 кВ, он будет вращаться со скоростью 935 об/мин. Два вольта на входе вызовут 1870 об/мин и т. д.
Двигатели с более низким значением KV производят гораздо больший крутящий момент, поэтому они могут вращать более крупные винты на более низких скоростях для получения подъемной силы. Большие двигатели KV производят гораздо меньший крутящий момент, но вращают винты меньшего размера намного быстрее, чтобы получить подъемную силу.
Обычно более крупные дроны используют двигатели с низким KV, а более мелкие дроны используют двигатели с высоким KV.
Последнее, что я скажу здесь, это то, что большинство производителей покажут вам спецификации деталей, которые следует использовать с двигателем, что может оказаться полезным при выборе деталей после того, как вы выбрали свои двигатели.
Наш образец двигателя поставляется со следующей полезной информацией.
Пропеллеры (реквизиты)
Следующая часть этого руководства по созданию дрона — это пропеллеры. Пропеллеры всегда будут иметь четырехзначный номер, например 8045, 1045 или 6030.
Пропеллеры всегда будут иметь четырехзначный номер, например 8045, 1045 или 6030.
Первые две цифры означают диаметр винта в дюймах (ура, американцы!). Таким образом, винт 8045 будет иметь диаметр 8 дюймов.
Последние две цифры обозначают шаг в дюймах. Пример 8045 имеет шаг 4,5 дюйма, а винт 6030 имеет шаг 3 дюйма.
Шаг немного менее интуитивно понятен, чем диаметр. Качественно, чем выше высота тона, тем больше воздуха будет проталкиваться вниз. Пропеллер с шагом 0 дюймов будет похож на вращение ножа для масла.
Чтобы понять, что на самом деле означает высота звука, давайте воспользуемся аналогией. Винты также имеют шаг. Если вы повернете шуруп на один оборот в кусок дерева, он вонзится в дерево на некоторую постоянную глубину.
Теперь давайте представим, что мы поместили шаг нашей опоры 8045 на винт, так что теперь винт имеет шаг 4,5 дюйма. Одно вращение винта заставит его врезаться в дерево на 4,5 дюйма. Теперь мы можем видеть, что чем выше шаг винта, тем больше вещества (воздуха) он будет перемещать.
Винт с большим шагом обычно используется с двигателями с низким значением KV, поскольку они обеспечивают больший крутящий момент. Они могут вращаться медленнее, так как пропеллеры с высоким шагом выталкивают много воздуха на единицу оборота. Винты с меньшим шагом используются с двигателями с высоким KV, поскольку они вращаются намного быстрее. Соответственно, они должны вращаться быстрее, так как выталкивают меньше воздуха за один оборот.
Электронные регуляторы скорости (ESC)
Если вы используете бесщеточный двигатель, вам понадобится электронный регулятор скорости. Коллекторным двигателям не требуется ESC, потому что им нужен только простой вход постоянного напряжения.
Бесщеточные двигатели, с другой стороны, требуют ввода трех противофазных напряжений. Не волнуйтесь, это звучит страшнее, чем есть на самом деле. Все, что вам нужно сделать, это подать на ESC входное напряжение постоянного тока, и он автоматически сгенерирует три противофазных напряжения, которые подключаются к двигателю, заставляя его вращаться.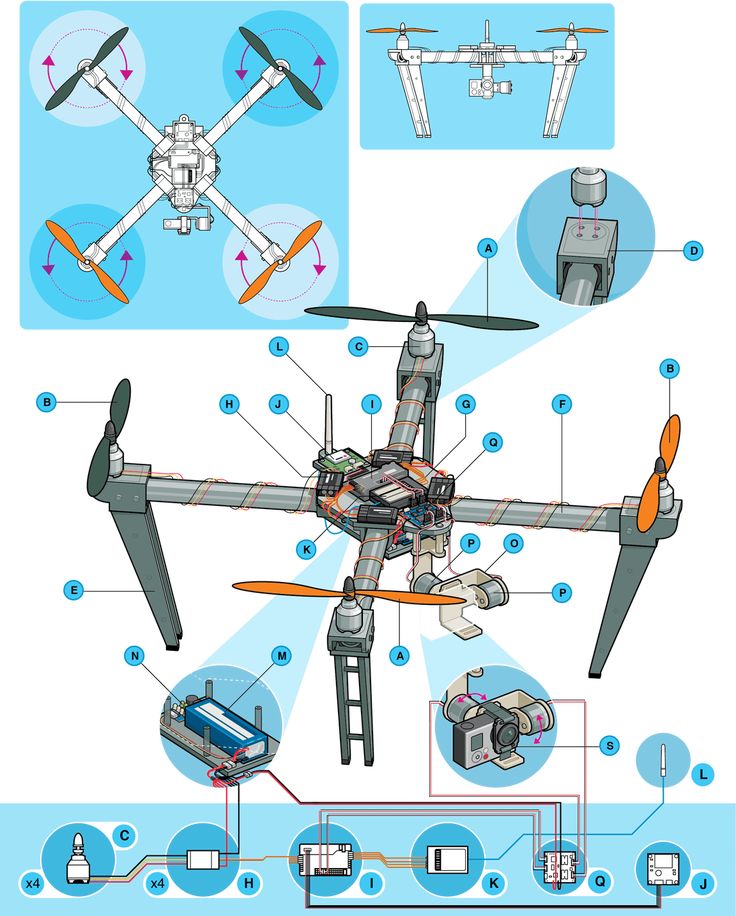
Ваш производитель сообщит вам диапазон входных напряжений, которые может выдержать ваш ESC, так что следите за этим.
Обычно ваш ESC поставляется с тремя выходами, и вы припаяете несколько штыревых коннекторов к концам, которые будут присоединены к штекерным штекерным разъемам моторов.
Литий-полимерный аккумулятор (батарея Lipo)
Аккумулятор питает все компоненты дрона. Выбор правильной батареи имеет решающее значение для создания дрона.
Почти всегда в качестве аккумулятора для дронов выбирают аккумулятор Lipo. Это связано с его атрибутами высокой емкости и высокого выходного тока.
Типичная батарея Lipo имеет следующие характеристики: 3000 мАч 4S 50C
Количество ячеек Lipo
Начнем с части 4S. Аккумуляторная батарея представляет собой набор отдельных маленьких батареек, называемых ячейками. Липоэлемент всегда имеет напряжение 4,2 В, когда он полностью заряжен, и 3,7 В, когда он разряжен.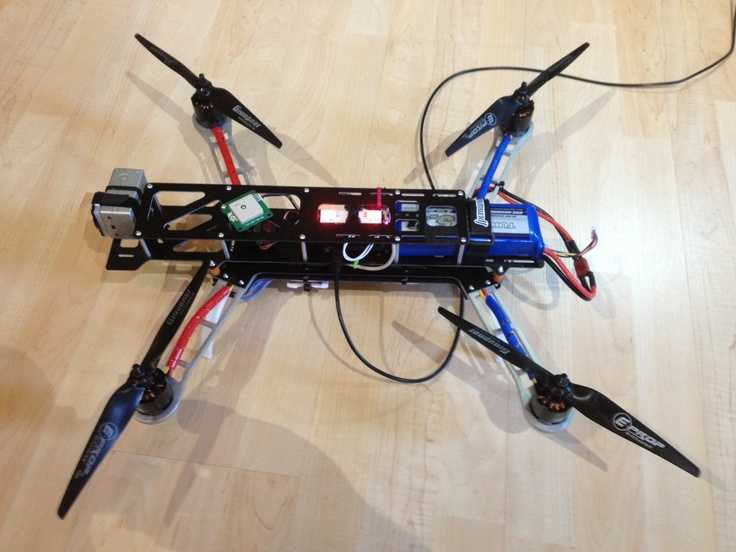 Таким образом, 4S означает, что четыре из этих Lipo-ячеек были помещены последовательно. Поскольку батареи, соединенные последовательно, добавляют напряжения, мы знаем, что полностью заряженное напряжение всей аккумуляторной батареи составляет:
Таким образом, 4S означает, что четыре из этих Lipo-ячеек были помещены последовательно. Поскольку батареи, соединенные последовательно, добавляют напряжения, мы знаем, что полностью заряженное напряжение всей аккумуляторной батареи составляет:
(Число ячеек) (Напряжение полностью заряженного аккумулятора) = (4 ячейки) (4,2 В) = 16,8 В
Емкость
Индивидуальная липо-ячейка
Переходим к спецификации мАч. Это мера емкости, а емкость обычно измеряется в кулонах заряда. Думайте о емкости как об объеме контейнера с жидкостью; он просто показывает, сколько заряда находится в аккумуляторе.
ПРЕДУПРЕЖДЕНИЕ О СУПЕР-БОТАНИКАХ. ПЕРЕЙДИТЕ К C-РЕЙТИНГУ, ЕСЛИ ВАС НЕ ВАЖНЫ ЕДИНИЦЫ!
Но подождите! В мАч нет единиц кулонов! На самом деле это так, но это просто скрыто. Позволь мне объяснить.
1 ампер = 1 кулон/секунда = 1 Кл/с
1 час = 1 час = 3600 секунд
м = милли = 1/1000
Итак, подставив наши переменные в мАч:
3000 мАч = 3000( 1/1000)(1 C/S)(3600 с) = 10800 кулонов
Таким образом, 3000 мАч — это то же самое, что сказать 10800 кулонов.
Следующая часть — рейтинг C
Рейтинг C
Чем выше рейтинг C, тем выше выходной ток для этой батареи.
Чтобы узнать максимальный выходной ток, который может выдержать ваша батарея, возьмите рейтинг C и умножьте его на емкость вашей батареи в единицах Ач.
Рейтинг C измеряется в обратных часах (1/час)
3 Ач*50(1/ч) = 150 А
Таким образом, эта гипотетическая батарея 50C может выдавать 150А тока!
Теперь есть некоторая путаница в отношении того, что на самом деле означает рейтинг C. Рейтинг C некоторых производителей просто означает максимальный импульсный ток, который вы можете выдать в течение 30 секунд, а другие используют рейтинг C для обозначения максимального непрерывного выходного тока. Обратитесь к производителю аккумуляторов, чтобы определить, какой рейтинг C они используют!
Плата распределения питания (PDB)
Плата распределения питания с разъемом для батареи
Плата распределения питания — это то место, где будут подключаться основные электрические компоненты. Основные элементы, которые вы будете припаивать к PDB, — это регуляторы скорости и разъем для аккумулятора.
Основные элементы, которые вы будете припаивать к PDB, — это регуляторы скорости и разъем для аккумулятора.
Когда вы подключаете аккумулятор к PDB, он подает питание на все, что подключено, поэтому ваши ESC будут получать ток от него.
Контроллер полета
Контроллер полета — это, по сути, мозг дрона. По сути, это аппаратный концентратор, к которому будут подключаться все части вашего дрона. Такие вещи, как ESC, GPS, телеметрия, вход RC и многие другие компоненты.
Все полетные контроллеры должны быть оснащены гироскопом и акселерометром (IMU), которые вместе помогают автоматически балансировать дрон без какого-либо ручного ввода.
Плата контроллера полета Pixhawk
Все контроллеры полета управляются прошивкой. В зависимости от полетного контроллера у вас может быть доступ к прошивке новой прошивки на плату. Прошивка может быть либо с закрытым исходным кодом (собственность компании, недоступной для общественности), либо с открытым исходным кодом (общедоступный может видеть код и вносить изменения).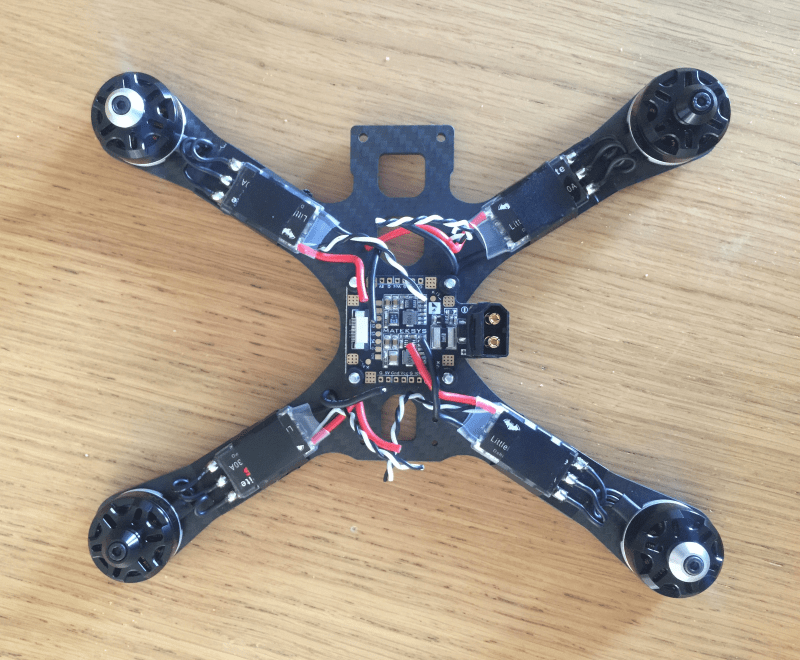
Если вы хотите сделать дрон с прошивкой с открытым исходным кодом, такой как ArduPilot или PX4, убедитесь, что плата, которую вы покупаете, поддерживается.
GPS
Модули GPS можно купить довольно дешево. Обычно они используют протокол UART или I2C, и большинство GPS-модулей, предназначенных для использования дронами, также оснащены магнитометром.
Вы должны поднять модуль GPS/магнитометра в воздух, чтобы уйти от магнитных полей, создаваемых электроникой вашего дрона.
Если ваш GPS находится слишком близко к электронике, это может привести к неверным показаниям, вызывающим забавный полет.
Вы хотите построить дрон с хорошим модулем GPS. Ищите тот, у которого есть чип M8N u-blox. Они намного лучше, чем некоторые другие модули GPS, доступные на Amazon, и стоят примерно столько же.
Контроллер ДУ
Передатчик радиоконтроллера
Контроллер ДУ состоит из передатчика (предмет, который держит пилот) и приемника (для приема команд от пилота).
Приемник подключится к вашему полетному контроллеру.
У вас есть несколько вариантов с RC-контроллером. Более дешевые RC-контроллеры имеют меньшее количество каналов. Однако минимальное количество каналов, которые вы должны использовать, составляет, вероятно, пять или шесть для дрона.
Радиоуправляемый приемник
Каждый дрон автоматически занимает четыре канала с помощью элементов управления Roll, Pitch, Yaw и Throttle.
Дополнительные каналы можно использовать для более уникального управления, например, для изменения режима полета мультиротора.
Телеметрия
Телеметрия также используется для беспроводной связи с дроном. Вы определенно хотите построить дрон с телеметрией.
Один модуль будет прикреплен к дрону, а другой к компьютеру (иногда его называют наземной станцией управления GCS). Обычно это plug and play.
Затем GCS может удаленно связываться с дроном. Он может как отправлять, так и получать информацию.
Модули телеметрии
Например, GCS может отслеживать положение дрона на карте, определять скорость движения дрона, видеть уровень заряда батареи и многое другое.
Его также можно использовать для управления дроном, а это значит, что вам не понадобится пульт дистанционного управления, чтобы управлять им.
Хотя это возможно и реально делается, телеметрия в основном используется для получения данных от дрона.
Как правильно выбрать детали?
Прежде чем вы начнете собирать детали и собирать дрон, нам нужно знать, как найти нужные детали. Процесс выбора правильных частей дрона представляет собой смесь искусства и науки.
Основным показателем, который мы будем рассматривать, является отношение тяги к массе, далее именуемое отношением TW.
TW Соотношения
Мы все умеем думать о весе. Это сила, с которой нас притягивает к земле.
Дроны также имеют вес и могут летать только в том случае, если они могут создавать восходящую тягу, превышающую их вес.
Таким образом, коэффициент TW, равный 2, означает, что дрон может производить восходящую силу в два раза больше, чем его вес.
Вы должны стремиться к разным отношениям TW в зависимости от применения вашего дрона. По этой причине определение целевого отношения TW — это первый шаг в процессе разработки собственного дрона, поскольку вы будете выбирать детали для достижения этой цели.
Если вы хотите летать на агрессивном дроне с видом от первого лица, обычно используется коэффициент TW от 4 и выше, но я видел и 11. но вы можете летать с таким низким коэффициентом TW, как 1,5.
Если у вашего дрона коэффициент TW равен 1, то далеко вы не улетите.
Оценка отношения тяги к весу
Чтобы оценить отношение TW, вам нужно начать с оценки веса вашего дрона.
Это означает просмотр приведенного выше списка деталей и добавление веса различных компонентов (таких как двигатели, ESC, полетный контроллер и т. д.). Вы должны начать с рамы, которую хотите построить, и выбрать оттуда детали.
Допустим, ваша оценка веса дрона, который вы хотели построить, составляет 1000 граммов. Если бы у вас была цель TW 2, это означало бы, что вам потребуется тяга 2000 граммов. Для квадрокоптера это будет означать тягу в 500 граммов на каждый мотор.
Тяга к весу
Оценка тяги двигателя зависит от напряжения батареи, размера винта и выбора двигателя. Измените одну из этих переменных, и вы измените силу создаваемой тяги.
Я предпочитаю выбирать двигатели тех производителей, которые предоставляют таблицы тяги. В таблицах тяги есть эмпирические данные, которые показывают, сколько граммов тяги у вас будет для разных переменных.
Ниже приведен пример таблицы осевых нагрузок для двигателей eMax 2213 кВ.
Для простоты предположим, что максимальная тяга этого двигателя на самом деле была максимальной величиной тяги, указанной в этой таблице. У нас будет максимум 670 граммов тяги при использовании 1045 пропеллеров/батареи 11 В или 49 граммов.0 грамм при использовании батареи 8045 prop/11V.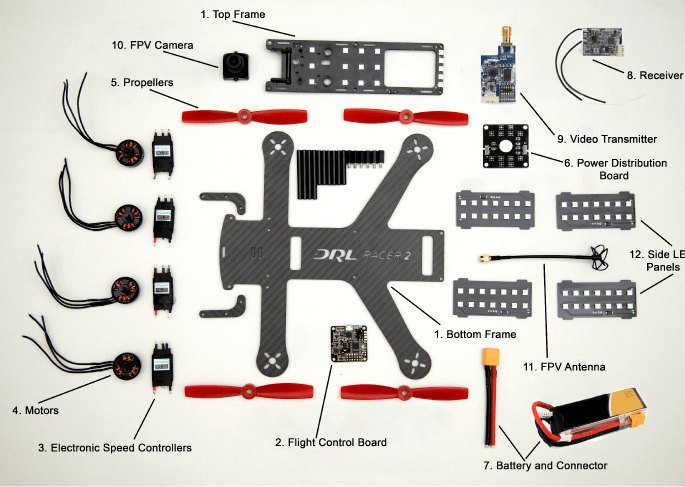
Таким образом, если бы мы использовали винты 8045, мы могли бы создать 1960 граммов тяги (490 г * 4 двигателя) при 11 В. При использовании 1045 винтов мы могли бы создать 2680 грамм тяги (670 г * 4 двигателя) при 11 В.
С TW = 2, имея 1960 граммов тяги при 1000 граммах веса, мы довольно близко подошли бы к нашей цели.
Если вы хотите более подробно изучить, как выбирать детали для сборки дрона, мой курс по сборке дронов подробно расскажет об этом!
Соберите дрон из выбранных деталей
- Припаяйте коннекторы к двигателям и регуляторам
- Припаяйте регуляторы скорости и разъем аккумулятора к PDB
- Закрепите PDB где-то в середине дрона. Обычно это середина или нижняя часть кадра. Закрепить PDB можно с помощью стяжек
- Закрепите регуляторы скорости на руках дрона: по одному на каждой руке. Регуляторы могут быть как на верхней, так и на нижней части руки.
- Привинтите двигатели к концу каждого рычага. Двигатели должны поставляться с крепежными винтами. Не затягивайте слишком сильно. У вас будет два двигателя по часовой стрелке и два двигателя против часовой стрелки, убедитесь, что они размещены на правильных плечах в соответствии с этой схемой.
 Двигатели должны поставляться с крепежными винтами. Не затягивайте слишком сильно. У вас будет два двигателя по часовой стрелке и два двигателя против часовой стрелки, убедитесь, что они размещены на правильных плечах в соответствии с этой схемой.
Двигатели должны поставляться с крепежными винтами. Не затягивайте слишком сильно. У вас будет два двигателя по часовой стрелке и два двигателя против часовой стрелки, убедитесь, что они размещены на правильных плечах в соответствии с этой схемой.Правильное направление вращения двигателя
Установка крепления GPS
Как откалибровать ESC менее чем за 5 минут (2020)
Посмотрите это видео на YouTube
 Не затягивайте верхний болт слишком сильно. Если вы установили правильный двигатель по часовой стрелке или против часовой стрелки в правильном месте, вращение пропеллеров естественным образом затянет болт. Также обратите внимание на то, какой тип реквизита вы используете. Вращение винта должно толкать воздух вниз.
Не затягивайте верхний болт слишком сильно. Если вы установили правильный двигатель по часовой стрелке или против часовой стрелки в правильном месте, вращение пропеллеров естественным образом затянет болт. Также обратите внимание на то, какой тип реквизита вы используете. Вращение винта должно толкать воздух вниз.- Испытайте его!
Полный курс по сборке дрона своими руками
Это руководство должно было придать вам уверенности, чтобы пойти и попробовать сделать свой собственный дрон. Если вы все еще немного опасаетесь начинать собственное путешествие по сборке дронов, обязательно посмотрите мой курс по сборке дронов своими руками.
Курс дронов Raspberry Pi
Он охватывает все содержание, изложенное на этой странице, но гораздо более подробно. Он также проведет вас по процессу сборки дрона со списком предварительно выбранных деталей, если вы хотите построить из списка деталей.
В качестве дополнительного бонуса дрон, созданный в этом курсе, использует Raspberry Pi, и кому это не понравится?
Дайте мне знать, если у вас есть какие-либо вопросы или комментарии ниже.
Счастливого полета!
Как построить дрона | Пошаговые инструкции
Итак, вы хотите построить свой собственный дрон, а не покупать его. Не бойся; мы создали руководство, которое проведет вас через все, что вам нужно, и каждый шаг, который вам нужно сделать, чтобы построить свой дрон и поднять его в воздух.
Прежде всего, вот подробный список всего, что вам нужно для начала работы.
Если вас больше интересуют дроны с видом от первого лица, ознакомьтесь с нашим руководством по сборке собственного дрона с видом от первого лица.
Необходимые элементы для сборки собственного дрона
Рама:
Рама является основой для вашего дрона. У вас есть возможность либо построить его самостоятельно, либо купить раму у продавца.
Рама также имеет решающее значение для размеров вашего дрона; количество рычагов у вашей рамы будет определять, сколько моторов вам понадобится. Квадрокоптеры, беспилотники с четырьмя двигателями, безусловно, самые популярные.
Другое измерение вашего дрона — размер; размеры рамы указывают самое дальнее расстояние, на котором два двигателя находятся друг от друга.
Двигатели:
Двигатели дронов делятся на два основных типа: щеточные и бесщеточные. Мы рекомендуем бесщеточные двигатели.
Несмотря на то, что они более дорогие, они также служат дольше, имеют меньше поломок и потребляют меньше энергии, что означает больше времени в эфире.
ESC или электронный регулятор скорости:
Неотъемлемая часть вашего дрона, так как он подает электроэнергию от аккумулятора к вашим двигателям. Вам понадобится по одному для каждого двигателя вашего дрона.
Вам понадобится по одному для каждого двигателя вашего дрона.
Пропеллеры:
При покупке пропеллеров вам нужно найти те, которые подходят к раме и двигателям вашего дрона.
Когда вы создаете свой собственный дрон, вы должны убедиться, что все работает вместе.
Распределительный щит:
Здесь подключаются основные электрические компоненты. Аккумулятор прикреплен к плате распределения питания, откуда электродвигатели и регуляторы получают питание.
Соединители:
Соединители необходимы для сварки двигателей и регуляторов скорости друг с другом и с распределительным щитом.
Контроллер полета:
Контроллер полета — это аппаратный узел вашего дрона. Здесь вы подключаете такие вещи, как ESC, вход RC, GPS, телеметрия и многие другие компоненты, которые вы можете подключить к своему дрону. По сути, это мозг вашего дрона.
Обычно они оснащены гироскопом и акселерометром, которые автоматически помогают балансировать дрон.
Контроллеры полета управляются их прошивкой, которая может быть либо с закрытым исходным кодом, где вы не можете видеть код или вносить изменения, либо с открытым исходным кодом, где вы можете вносить свои модификации.
Аккумуляторы:
При покупке аккумуляторов необходимо снова учитывать емкость и тип аккумулятора, чтобы он подходил для вашего дрона. Наиболее часто используемыми аккумуляторами являются аккумуляторы Li-Po.
Монитор батареи:
Монитор батареи не является предметом первой необходимости. Тем не менее, это очень полезно, так как позволяет узнать, сколько сока у вас осталось.
ПДУ Контроллер:
Используется пилотом дрона для управления дроном.
Приемник RC:
Принимает входные данные, когда вы или кто-то еще использует контроллер.
Монтажная площадка:
Снижает вибрации и, следовательно, улучшает полет. Это удобно при съемке видео.
Подвес:
Подвес — это система поддержки вашей камеры. Он удерживает вашу камеру под одним и тем же углом, независимо от движения, и уменьшает вибрации. Это важно, если вы хотите превратить свои кадры из любительских в профессиональные.
Он удерживает вашу камеру под одним и тем же углом, независимо от движения, и уменьшает вибрации. Это важно, если вы хотите превратить свои кадры из любительских в профессиональные.
Камера:
Необходима для записи видео. Лучшие камеры дронов могут снимать в качестве 4K.
USB-ключ/карта Micro SD:
Если вы используете камеру, вам нужно где-то хранить отснятый материал.
Далее! Теперь у вас есть все детали, давайте посмотрим, как собрать собственный дрон.
9 простых шагов: сборка дрона
Шаг 1: Соберите раму.
Если вы делаете раму самостоятельно, вам необходимо ее собрать. В зависимости от того, насколько прочным должен быть ваш дрон, вы можете использовать различные материалы, такие как металл, пластик или дерево.
Ваша рама должна иметь форму буквы X, и каждый пропеллер должен располагаться в каждой точке этой буквы.
Шаг 2: Соберите двигатели и пропеллеры вашего дрона.
Если вы собираете раму, вам нужно будет сделать отверстия для двигателей и прикрепить их к раме.
Если у вас есть готовая рама, вы можете обнаружить, что она поставлялась с креплениями для ваших двигателей.
Шаг 3: Установите электронные регуляторы скорости.
Когда вы прикрепите двигатели, вам нужно будет подключить регуляторы скорости к нижней части рамы вашего дрона.
Шаг 4: Подсоедините разъем аккумулятора к PDB.
Прикрепите PDB к нижней части дрона и подключите разъемы аккумулятора.
Шаг 5: Прикрепите шасси.
На вашем дроне должно быть шасси, чтобы поглощать удары при приземлении на твердую поверхность.
Сделайте посадочный материал из чего-то твердого и гибкого, так как это поможет вам не повредить дрон при его установке.
Шаг 6: Выберите и добавьте свой полетный контроллер.
Установите контроллер полета на дрон. Убедитесь, что вы добавили губку или какой-нибудь мягкий материал под контроллер, чтобы уменьшить вибрации.
Тогда ваш дрон сможет оставаться стабильным в воздухе и чувствовать изменения и изменения ветра.
Шаг 7: Подключите дрон к GCS и откалибруйте датчики.
Убедитесь, что все работает правильно. Вы можете проверить это, используя GCS и откалибровав различные датчики на вашем дроне.
Шаг 8. Перепроверьте и протестируйте.
Проверьте и перепроверьте, все ли работает и откалибровано. Выберите безопасное место, медленно увеличьте скорость своего дрона и летите на малой высоте в первый раз, когда вы тестируете свой дрон.
Шаг 9: Подготовьтесь к взлету.
Теперь осталось только выяснить, где вам разрешено летать на вашем дроне, и убедиться, что все в порядке, прежде чем отправляться туда и летать на своем новеньком дроне.
Арендуйте или подпишитесь на свой следующий дрон
Теперь вы знаете, как собрать дрон и подготовить его к полету, но если вы только начинаете, как насчет аренды или подписки на ваш следующий дрон?
Вам не нужно беспокоиться о значительных инвестициях и иметь точные технические знания в области пайки и калибровки. Просто рискните и попробуйте дрон.
Просто рискните и попробуйте дрон.
А если в вашем арсенале снаряжения еще не все, ознакомьтесь с необходимой камерой здесь.
Часто задаваемые вопросы о том, как собрать дрон
Как собрать дрон с нуля?
Чтобы собрать дрон, нужно подобрать нужные детали и объединить их в свой собственный дрон.
Трудно ли построить дронов?
Создание дрона требует некоторых технических знаний.
Дорого ли построить собственный дрон?
Создание дрона требует правильных деталей и может потребовать значительных инвестиций, а также зависит от того, сколько вы хотите и можете сделать сами.
Арендуйте дрон у местных создателей.
Сэкономьте до 40%.
Включено глобальное покрытие.
Пробная аренда
https://www.wedio.com/en/drones
10 €
Аренда для владения
20 €
https://images.wedio.com/images/listing_images/images/1949796/300×215/rent-dji-mavic-mini-on-wedio.