Содержание
Как сделать своими руками дрон на Ардуино Уно
Дрон — очень дорогой гаджет. Как собрать квадрокоптер самому в домашних условиях? В этой инструкции я собираюсь рассказать, как сделать своими руками квадрокоптер по дешевке. Рама коптера и контроллер полета — самодельные. Конструкция сборки доступна даже для начинающих.
Рама состоит из алюминиевой антенны (штанги), лопасти вентилятора из алюминиевого плафона и дерева. Arduino UNO наряду с MPU6050 (гироскоп + Accle) используется в качестве контроллера полёта.
Шаг 1: Материалы
Показать еще 11 изображений
Это материалы, которые используются для моего дрона. Вы можете использовать любые детали / материалы по вашему усмотрению. Если вы хотите сделать его максимально дешевым, то можете воспользоваться списком материалов ниже.
Ссылки на Амазон:
- Flysky fs-i6x с ресивером X6B
- Батарейка Li-po 11.
 1v, лучше взять эту
1v, лучше взять эту - Зарядник Li-Po
- Arduino UNO
- Гироскоп и акселерометр Mpu6050
- Макетная плата
- Коннетор XT60
- Передатчик и ресивер
- устройство для контроля напряжения Li-Po
 1v, лучше взять эту
1v, лучше взять этуСписок со ссылками на banggood:
- Передатчик и ресивер
- Бесщеточный двигатель
- 30 Amp ESC
- Li-Po батарейка
- Зарядное устройство Li-Po
- Контроллер напряжения Lipo
- Arduino uno
- MPU6050
- XT60 коннектор
- Пропеллер 1045
Ссылки на gearbest:
- Flysky fs-i6x с ресивером X6B
- Батарейка Li-po 11.1v
- Контроллер напряжения Lipo
- Зарядник Li-Po
- Arduino UNO
- Гироскоп и акселерометр Mpu6050
- Коннетор XT60
- Вентильный двигатель CW
- Вентильный двигатель CCW
- 4*30Amp ESCs
- Пропеллер 1045
- Термоусадочная трубка
Шаг 2: Установка моторов
Когда вы покупаете моторы, крепление мотора и несколько винтов входят в комплект. Крепление алюминиевого мотора с винтами идет с ним. (см. рисунок). Установите его на двигатель, используя винты.
Крепление алюминиевого мотора с винтами идет с ним. (см. рисунок). Установите его на двигатель, используя винты.
Шаг 3: Делаем раму
Показать еще 3 изображения
Я использую старую алюминиевую антенну, мягкое дерево и алюминиевую пластину (лопасть вентилятора), чтобы сделать каркас. Отрежьте 4 куска алюминиевого бруска по 20см. Размер центральной пластины составляет около 11 * 18 см…. Деревянное крепление для двигателя имеет длину около 10 см и диаметр 4,5 см (там, где установлен двигатель).
Закрепите алюминиевые стержни с помощью центральной пластины с помощью винтов и вставьте крепление двигателя под алюминиевые стержни. Ваша рама готова (см. видео).
Шаг 4: Устанавливаем все компоненты (ESC и моторы на раму)
Показать еще 4 изображения
Теперь прикрепите моторы к деревянному креплению с помощью винтов и гаек (любых типов) и соедините с ними провод ESC (произвольно), зафиксируйте ESC с помощью изоленты или стяжек, в моем случае это изолента (дешевле, чем стяжки).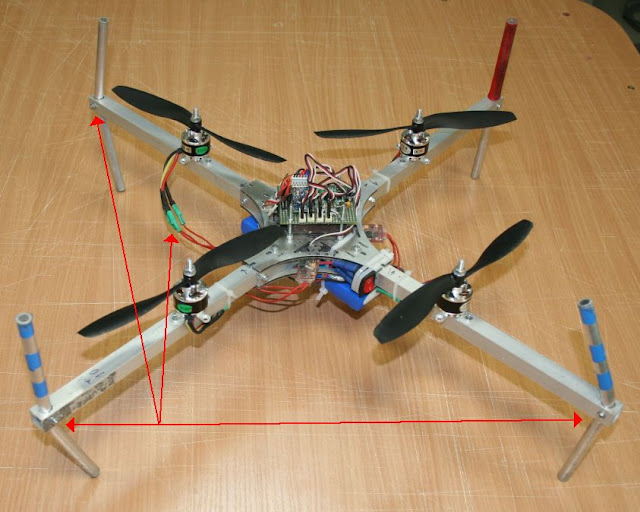 После подключения всех моторов и ESC отрежьте провода ESC +ve и –ve и подключите все ESC с помощью проводов или PDB. Я использую провода, потому что в моей раме нет места для ESC. Всё готово.
После подключения всех моторов и ESC отрежьте провода ESC +ve и –ve и подключите все ESC с помощью проводов или PDB. Я использую провода, потому что в моей раме нет места для ESC. Всё готово.
Шаг 5: Контроллер полёта
Показать еще 4 изображения
На основе Ардуино Уно и MPU6050, создайте контроллер полёта.
Мой контроллер основан на Joop Brokking’s YMFC-AL и его автоуровневом квадрокоптере. Соедините все согласно диаграмме.
Шаг 6: Соединяем ESC и ресивер с контроллером полёта
*** Не соединяйте BEC-провод ESC (5 вольт), соединяйте лишь сигнальный провод
*** Запитывайте ресивер от 5вольтового источника Ардуино
Соединение ESC:
- Цифровой пин-4 к ESC1 (правый передний CCW)
- Цифровой пин-5 к ESC2 (правый задний CW)
- Цифровой пин-6 к ESC3 (левый задний CCW)
- Цифровой пин-7 к ESC4 (левый передний CW)
Соединение ресивера:
- Цифровой пин-8 к каналу 1 ресивера
- Цифровой пин-9 к каналу 2 ресивера
- Цифровой пин-10 к каналу 3 ресивера
- Цифровой пин-11 к каналу 4 ресивера
Шаг 7: Настройка контроллера полёта (загрузка скетча)
Показать еще 4 изображения
*** На этом этапе не подключайте лётную батарею
Теперь загрузите Arduino IDE и приложенный скетч и извлеките файл. Вы найдете схемы YMFC-Al, файл Readme, код калибровки ESC, код настройки и код контроллера полета.
Вы найдете схемы YMFC-Al, файл Readme, код калибровки ESC, код настройки и код контроллера полета.
Arduino IDE
Скетч контроллера полета
Сначала загрузите код и откройте последовательный монитор на 56000b и следуйте инструкциям в видео
Если ошибки не возникло, загрузите скетч калибровки ESC после загрузки кода. Поставьте передатчик на полную мощность и подключите летную батарею после нескольких звуковых сигналов, выключите дроссель (я думаю, что этот метод работает не для всех типов и марок ESC, но у меня это работает отлично).
После загрузки скетча калибровки ESC загрузите скетч контроллера полета и Ваш FC готов.
Файлы
- YMFC-AL.zip
Шаг 8: Установка электроники в кейс и монтаж
Показать еще 11 изображений
После завершения всех работ по соединению электрокомпонентов, положите всю электронику в коробку и завершите всю проводку. Теперь установите винты CCW на двигатели CCW и винты CW на двигатели CW. Вы готовы к полету.
Теперь установите винты CCW на двигатели CCW и винты CW на двигатели CW. Вы готовы к полету.
Самое сложное в создании этого квадрокоптера — настройка PID. Я сломал 2 пары пропеллеров и коробку с электроникой, пытаясь научиться летать на ней.
Как сделать своими руками дрон на Ардуино Уно
Дрон — очень дорогой гаджет. Как собрать квадрокоптер самому в домашних условиях? В этой инструкции я собираюсь рассказать, как сделать своими руками квадрокоптер по дешевке. Рама коптера и контроллер полета — самодельные. Конструкция сборки доступна даже для начинающих.
Рама состоит из алюминиевой антенны (штанги), лопасти вентилятора из алюминиевого плафона и дерева. Arduino UNO наряду с MPU6050 (гироскоп + Accle) используется в качестве контроллера полёта.
Шаг 1: Материалы
Показать еще 11 изображений
Это материалы, которые используются для моего дрона. Вы можете использовать любые детали / материалы по вашему усмотрению. Если вы хотите сделать его максимально дешевым, то можете воспользоваться списком материалов ниже.
Вы можете использовать любые детали / материалы по вашему усмотрению. Если вы хотите сделать его максимально дешевым, то можете воспользоваться списком материалов ниже.
Ссылки на Амазон:
- Flysky fs-i6x с ресивером X6B
- Батарейка Li-po 11.1v, лучше взять эту
- Зарядник Li-Po
- Arduino UNO
- Гироскоп и акселерометр Mpu6050
- Макетная плата
- Коннетор XT60
- Передатчик и ресивер
- устройство для контроля напряжения Li-Po
Список со ссылками на banggood:
- Передатчик и ресивер
- Бесщеточный двигатель
- 30 Amp ESC
- Li-Po батарейка
- Зарядное устройство Li-Po
- Контроллер напряжения Lipo
- Arduino uno
- MPU6050
- XT60 коннектор
- Пропеллер 1045
Ссылки на gearbest:
- Flysky fs-i6x с ресивером X6B
- Батарейка Li-po 11.1v
- Контроллер напряжения Lipo
- Зарядник Li-Po
- Arduino UNO
- Гироскоп и акселерометр Mpu6050
- Коннетор XT60
- Вентильный двигатель CW
- Вентильный двигатель CCW
- 4*30Amp ESCs
- Пропеллер 1045
- Термоусадочная трубка
Шаг 2: Установка моторов
Когда вы покупаете моторы, крепление мотора и несколько винтов входят в комплект.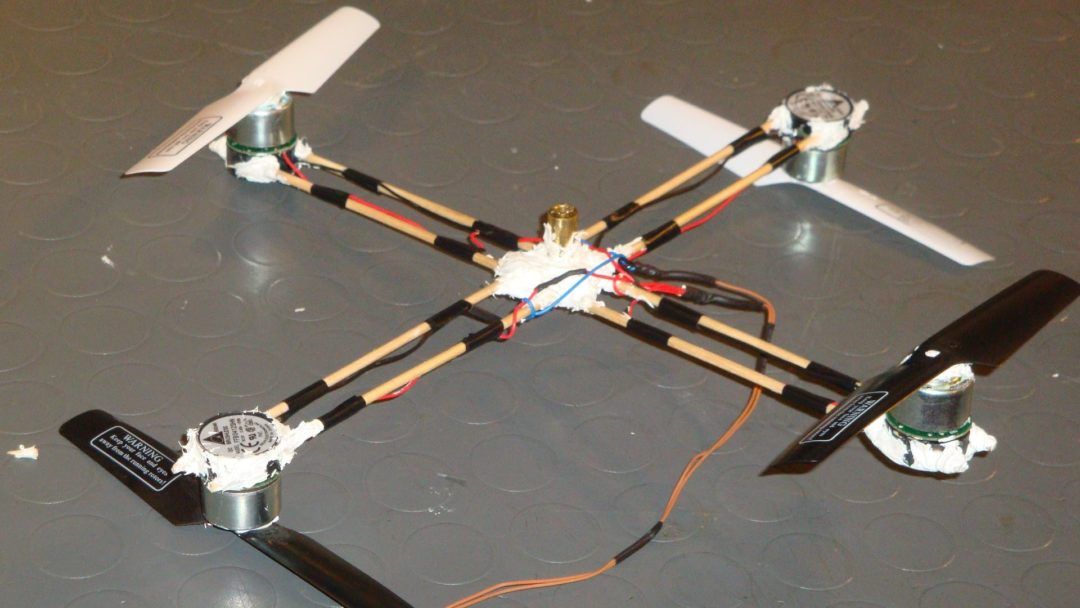 Крепление алюминиевого мотора с винтами идет с ним. (см. рисунок). Установите его на двигатель, используя винты.
Крепление алюминиевого мотора с винтами идет с ним. (см. рисунок). Установите его на двигатель, используя винты.
Шаг 3: Делаем раму
Показать еще 3 изображения
Я использую старую алюминиевую антенну, мягкое дерево и алюминиевую пластину (лопасть вентилятора), чтобы сделать каркас. Отрежьте 4 куска алюминиевого бруска по 20см. Размер центральной пластины составляет около 11 * 18 см…. Деревянное крепление для двигателя имеет длину около 10 см и диаметр 4,5 см (там, где установлен двигатель).
Закрепите алюминиевые стержни с помощью центральной пластины с помощью винтов и вставьте крепление двигателя под алюминиевые стержни. Ваша рама готова (см. видео).
Шаг 4: Устанавливаем все компоненты (ESC и моторы на раму)
Показать еще 4 изображения
Теперь прикрепите моторы к деревянному креплению с помощью винтов и гаек (любых типов) и соедините с ними провод ESC (произвольно), зафиксируйте ESC с помощью изоленты или стяжек, в моем случае это изолента (дешевле, чем стяжки). После подключения всех моторов и ESC отрежьте провода ESC +ve и –ve и подключите все ESC с помощью проводов или PDB. Я использую провода, потому что в моей раме нет места для ESC. Всё готово.
После подключения всех моторов и ESC отрежьте провода ESC +ve и –ve и подключите все ESC с помощью проводов или PDB. Я использую провода, потому что в моей раме нет места для ESC. Всё готово.
Шаг 5: Контроллер полёта
Показать еще 4 изображения
На основе Ардуино Уно и MPU6050, создайте контроллер полёта.
Мой контроллер основан на Joop Brokking’s YMFC-AL и его автоуровневом квадрокоптере. Соедините все согласно диаграмме.
Шаг 6: Соединяем ESC и ресивер с контроллером полёта
*** Не соединяйте BEC-провод ESC (5 вольт), соединяйте лишь сигнальный провод
*** Запитывайте ресивер от 5вольтового источника Ардуино
Соединение ESC:
- Цифровой пин-4 к ESC1 (правый передний CCW)
- Цифровой пин-5 к ESC2 (правый задний CW)
- Цифровой пин-6 к ESC3 (левый задний CCW)
- Цифровой пин-7 к ESC4 (левый передний CW)
Соединение ресивера:
- Цифровой пин-8 к каналу 1 ресивера
- Цифровой пин-9 к каналу 2 ресивера
- Цифровой пин-10 к каналу 3 ресивера
- Цифровой пин-11 к каналу 4 ресивера
Шаг 7: Настройка контроллера полёта (загрузка скетча)
Показать еще 4 изображения
*** На этом этапе не подключайте лётную батарею
Теперь загрузите Arduino IDE и приложенный скетч и извлеките файл. Вы найдете схемы YMFC-Al, файл Readme, код калибровки ESC, код настройки и код контроллера полета.
Вы найдете схемы YMFC-Al, файл Readme, код калибровки ESC, код настройки и код контроллера полета.
Arduino IDE
Скетч контроллера полета
Сначала загрузите код и откройте последовательный монитор на 56000b и следуйте инструкциям в видео
Если ошибки не возникло, загрузите скетч калибровки ESC после загрузки кода. Поставьте передатчик на полную мощность и подключите летную батарею после нескольких звуковых сигналов, выключите дроссель (я думаю, что этот метод работает не для всех типов и марок ESC, но у меня это работает отлично).
После загрузки скетча калибровки ESC загрузите скетч контроллера полета и Ваш FC готов.
Файлы
- YMFC-AL.zip
Шаг 8: Установка электроники в кейс и монтаж
Показать еще 11 изображений
После завершения всех работ по соединению электрокомпонентов, положите всю электронику в коробку и завершите всю проводку.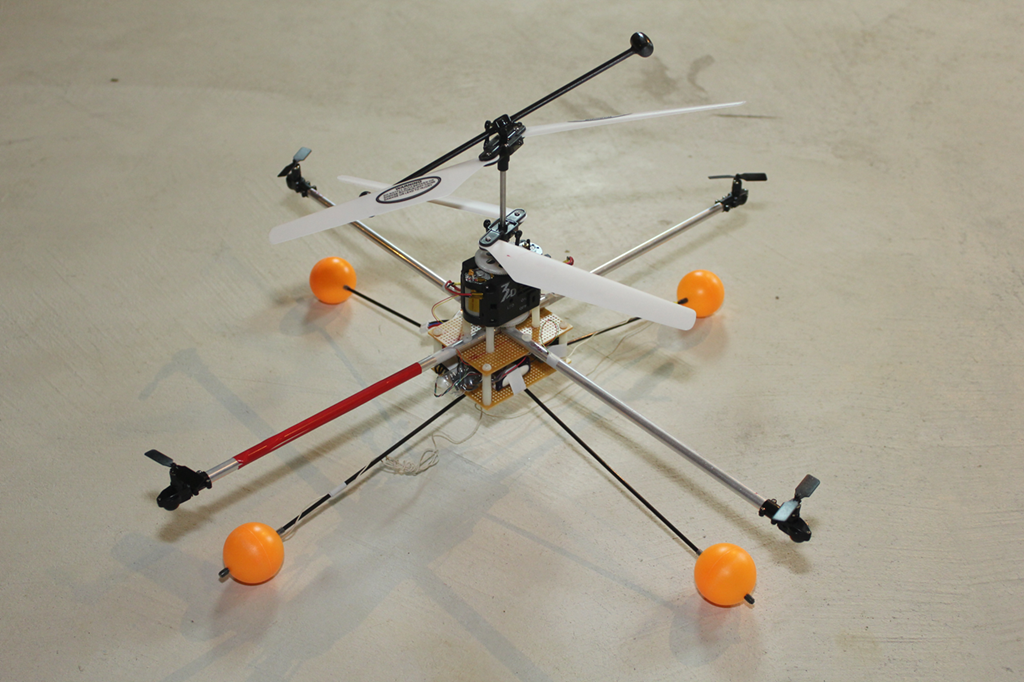 Теперь установите винты CCW на двигатели CCW и винты CW на двигатели CW. Вы готовы к полету.
Теперь установите винты CCW на двигатели CCW и винты CW на двигатели CW. Вы готовы к полету.
Самое сложное в создании этого квадрокоптера — настройка PID. Я сломал 2 пары пропеллеров и коробку с электроникой, пытаясь научиться летать на ней.
Сборка дешевого самодельного дрона
Первоначально опубликовано 24 марта 2019 г.
Самодельный мини-дрон
Содержание
- Обзор
- Компоненты самодельного дрона
- Собираем дрон своими руками
- Резюме
- Связанные статьи
Обзор
Если вы новичок и хотите управлять небольшим прочным дроном в качестве хобби, то эта инструкция для вас! Теперь вы можете собрать свой мини-квадрокоптер своими руками с нуля, и он не просверлит дыру в вашем кармане. Вам больше не нужно покупать дорогие дроны, так как этот дрон не будет стоить вам больше 20 долларов . Вы можете наслаждаться полетом мини-дрона, который весит менее 100 грамм . Итак, давайте посмотрим, что нам нужно для сборки этого дрона.
Итак, давайте посмотрим, что нам нужно для сборки этого дрона.
Компоненты для самодельных дронов
- 4 миниатюрных двигателя: их можно найти в магазине электроники для хобби; выбрать двигатель мощностью 400-500 кВ
Миниатюрные двигатели
2. 4 кожуха двигателя: используются для удержания двигателей на месте
кожуха двигателя
3. 4 Пропеллера: желательно диаметром 10 см; при покупке убедитесь, что пропеллеры плотно прилегают к ротору мотора
Мини-пропеллеры
4. Литий-полимерный аккумулятор. Аккумулятора на 3,7 В с номиналом 300–500 мА·ч и температурой 25 °С будет достаточно для полета продолжительностью 10–15 минут.
Литий-полимерный аккумулятор
5. Зарядное устройство: зарядное устройство на 3,7 В; вы можете купить его с батареей
6. Пара передатчик-приемник 2,4 ГГц: я использовал плату HY-JJh46; вы можете найти множество таких контроллеров полета в Интернете. Если у вас нет подходящих деталей, вы можете приобрести плату контроллера полета и пульт дистанционного управления (радиопередатчик) для управления дроном. Контроллер полета позволяет вам управлять дроном разными способами, и мы познакомим вас с тем, как это сделать, во второй части, используя Arduino в качестве контроллера полета.
Если у вас нет подходящих деталей, вы можете приобрести плату контроллера полета и пульт дистанционного управления (радиопередатчик) для управления дроном. Контроллер полета позволяет вам управлять дроном разными способами, и мы познакомим вас с тем, как это сделать, во второй части, используя Arduino в качестве контроллера полета.
Передатчик-приемник контроллера полета
7. 2 тюбика с чернилами для шариковых ручек: для изготовления лопастей квадрокоптера
тюбики с чернилами для шариковых ручек для изготовления лопастей пропеллеров
8. Материал Thermocol: для крепления схемы
9. Лента/термоклей
Сборка самодельного дрона
Шаг 1
Выньте миниатюрные двигатели и установите их в корпуса. Кроме того, возьмите четыре пропеллера и установите по одному на каждый мотор. Убедитесь, что пропеллеры плотно прилегают к ротору двигателя, чтобы избежать каких-либо сбоев на более позднем этапе.
Подключить двигатели
Шаг 2
Извлеките плату приемника HY-JJh46-RX и подключите четыре двигателя, как показано на принципиальной схеме.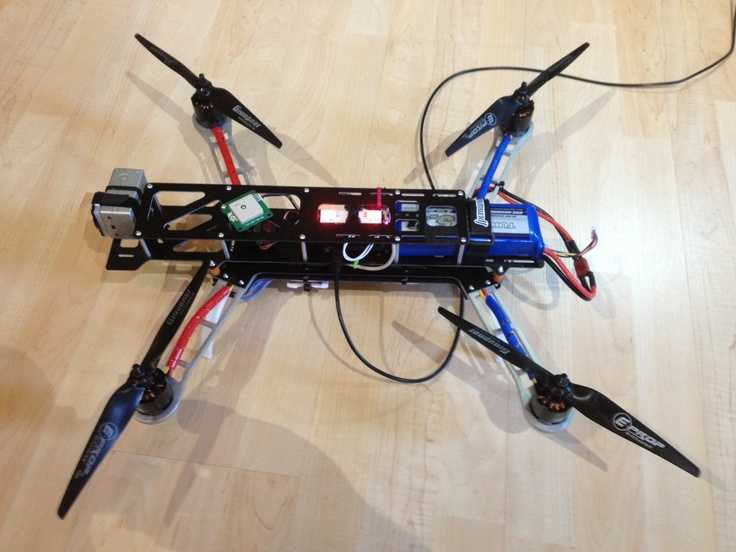 Плата, показанная на схемах, отличается от Fritzing, поэтому выполните соединения следующим образом:
Плата, показанная на схемах, отличается от Fritzing, поэтому выполните соединения следующим образом:
- Двигатель RF (правый передний)
- Положительный провод (двигатель) -> вывод RF+ (плата RX)
- Минусовой провод (двигатель) -> контакт RF (плата RX)
- Двигатель LF (левый передний)
- Положительный провод (двигатель) -> контакт LF+ (плата RX)
- Минусовой провод (двигатель) -> контакт LF (плата RX)
- Двигатель LB (слева сзади)
- Положительный провод (двигатель) -> контакт LF+ (плата RX)
- Минусовой провод (двигатель) -> контакт LB (плата RX)
- Двигатель RB (правый задний)
- Положительный провод (двигатель) -> вывод RF+ (плата RX)
- Минусовой провод (двигатель) -> контакт RB (плата RX)
Принципиальная схема подключения двигателей
Шаг 3
Извлеките литий-полимерный аккумулятор (в моем случае 380 мАч, 25C, 3,7 В) и подключите его к плате следующим образом: )
Шаг 4
Возьмите кусок термокола и вырежьте из него кубик размером 5 см x 5 см x 5 см.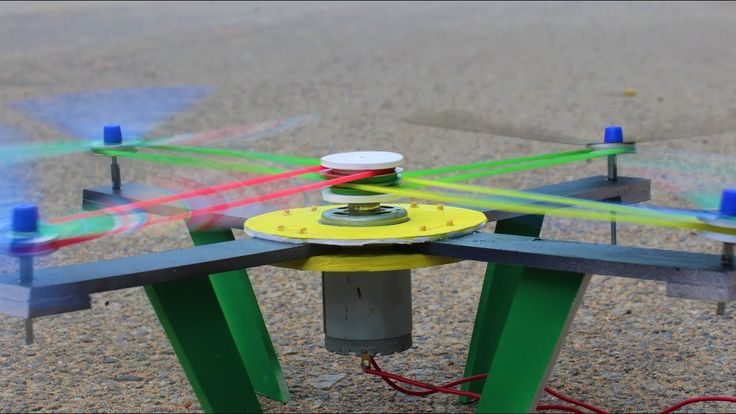
Материал Thermocol
Шаг 5
Возьмите две шариковые ручки и извлеките из них чернильные трубки. Теперь пропустите его через термокол-куб таким образом, чтобы чернильная трубка проходила точно через среднюю точку квадрата.
Пропустить чернильные трубки через термокол-куб
Шаг 6
Подсоедините двигатели на обоих концах двух чернильных трубок и затяните винты. Используйте горячий клей/ленту, чтобы закрепить чернильные трубки на месте.
Используйте клей, чтобы соединить моторы на чернильных трубках
Используйте клей для соединения двигателей на каждом конце трубки для чернил
Прикрепите батарею и плату приемника к кубу
Шаг 7
Поместите аккумулятор на верхнюю часть термокуба и поместите на него плату RX. Закрепите сборку с помощью скотча/горячего клея. Вот так! Ваш дрон готов к взлету. Включите кнопку питания в верхней части полетного контроллера и начните веселье.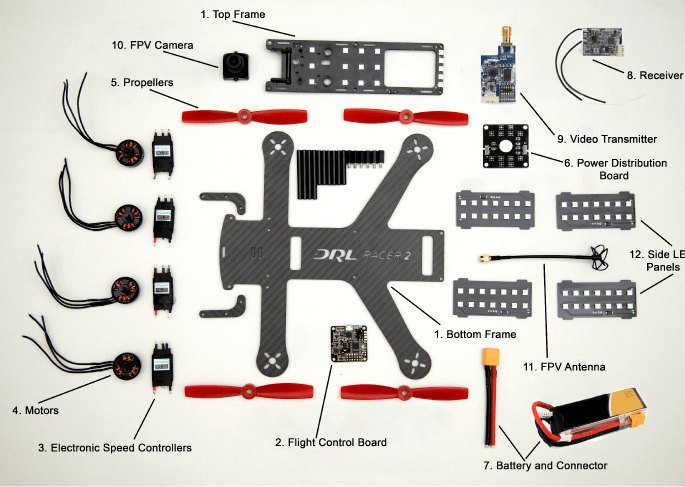
Резюме
Помните, что вращающиеся пропеллеры дрона чрезвычайно опасны и могут привести к серьезным травмам. Всегда управляйте дроном в открытом месте и избегайте летать близко к людям.
Этим маленьким самодельным дроном очень сложно управлять, поэтому будьте особенно осторожны при управлении им. В следующей статье мы собираемся использовать более устойчивую раму для дрона и использовать Arduino в качестве контроллера полета.
Узнайте больше руководств, чтобы отточить свои навыки работы с дроном с помощью Arduino:
- Как собрать дрон своими руками с нуля. Часть 2. Использование Arduino Nano в качестве контроллера полета
- Как собрать дрон своими руками с нуля. Часть 3. Создание дрона с функцией GPS Follow-Me
- Топ 5 самодельных взломов дронов с использованием Arduino
- Четыре хобби-квеста с дронами, которые вы можете выполнить из дома прямо сейчас
- Знакомство с микродронами для поклонников Maker
Посетите нас в социальных сетях
Как сделать мини-дрон в домашних условиях — летающий дрон своими руками
В этой статье я подробно покажу шаги Как сделать мини-дрон в домашних условиях каждый может его построить.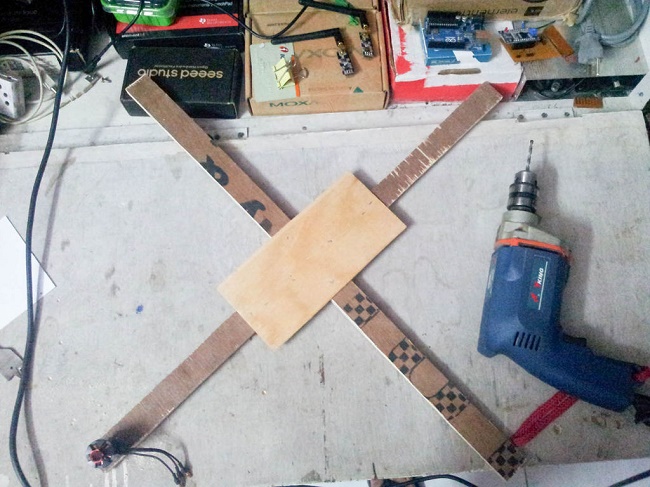 Это также может стать идеей вашего следующего научного проекта.
Это также может стать идеей вашего следующего научного проекта.
Маленький самодельный летающий дрон
Все хотят летать на дроне, но из-за завышенных цен и местных правил полетов многие из них не могут летать на дронах, также немногие не могут позволить себе купить дрон, так почему же мы не можем сделать мини-дрон для себя, когда все материалы, необходимые для их изготовления, доступны онлайн!
Примечание: Ссылка на видео находится в конце
А поскольку это мини-игрушечный дрон, риск полета отсутствует, так как у него нет камеры, а также он не может летать на большие расстояния!
Преимущество создания дрона
Одно из преимуществ здесь
Он может выдержать небольшие аварии без каких-либо повреждений
Может быть для вас настоящим тренировочным дроном!
Сначала давайте начнем с материалов, необходимых для изготовления мини-дрона,
- Передатчик дрона (пульт дистанционного управления)
- Небольшой литий-полимерный аккумулятор
- Набор из 4 двигателей без сердечника, также называемых двигателями постоянного тока с высокими оборотами
- Плата приемника
- Ссылки на все детали см. в ссылке описания моего видео
 в ссылке описания моего видео
в ссылке описания моего видеоРама для дрона своими руками
Основная рама для этого мини-квадрокоптера, поскольку мы используем набор из 4 двигателей без ядра, нам не нужен электронный регулятор скорости, короче говоря, ESC для управления скоростью пропеллеров, он будет встроен в нашу плату приемника.
Эти мини-моторы не способны нести дополнительную полезную нагрузку, несмотря на батарею и вес кузова, поэтому для уменьшения веса кузова я буду использовать пробковое дерево
пробковое дерево — это тип дерева, который очень легкий по весу, но обладает хорошей прочностью, поэтому он используется в строительстве самолетов с дистанционным управлением и других небольших летательных аппаратов
Основная проблема при использовании этого дерева заключается в том, что оно впитывает воду, в отличие от пластика и стали, но кто летает на дроне в дождь!!
Квадрат со стороной 6 см должен быть начерчен на пробковом дереве, каждый угол окружности имеет точно такой же диаметр, как нарисованы двигатели
Большой круг начерчен внутри квадрата
После того, как круг будет завершен, пора рисовать внутренние кривые
Дуги должны быть вырезаны, взяв за основу средние линии сторон квадрата.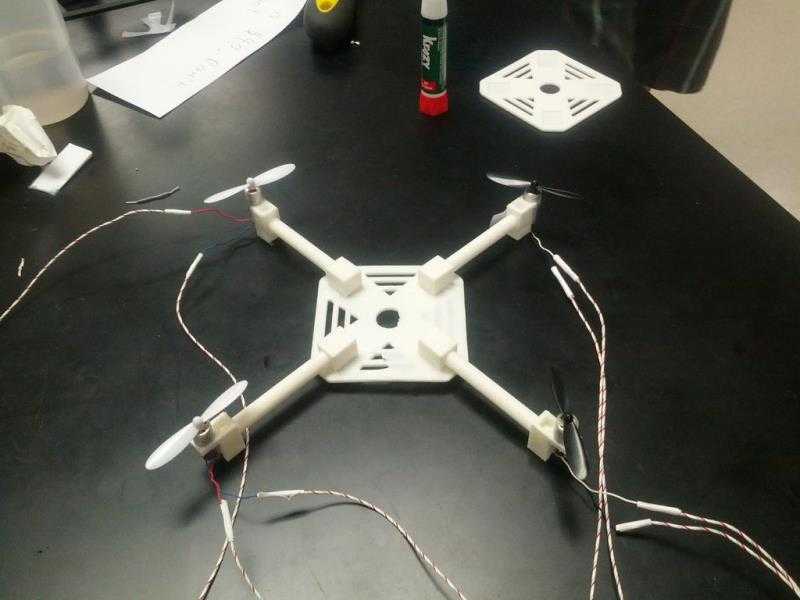 Используя компас,
Используя компас,
Рама для мини-дрона
Выполните следующие действия
Изготовление каркаса с помощью дрона, простые шаги для бальзового каркаса
Наметьте грубые линии на дополнительных поверхностях, которые необходимо удалить
Вырежьте с помощью резака
Протрите наждачной бумагой для гладкой обработки краев
Освободите место для высокоскоростных двигателей постоянного тока, обрезав обведенные края
Чтобы удержать двигатели без сердечника на месте, я разрезаю круг пополам
с помощью горячего клея я могу приклеить двигатели
После того, как все четыре двигателя без сердечника припаяйте провода к плате приемника убедитесь, что положительные и отрицательные клеммы подключены точно к нужным клеммам на печатной плате
Если клеммы подключены неправильно, дрон ведет себя очень странно! Этого не должно происходить, поэтому необходимо соблюдать осторожность перед пайкой
После того, как все будет установлено, дважды проверьте соединения
Убедитесь, что вращения противоположных двигателей остаются одинаковыми
Например, если я пронумерую двигатели как 1,2,3 и 4 по часовой стрелке, пропеллеры номер 1 и 3 должны вращаться те же направления, где 2 и 4 должны быть одинаковыми, это будет тот же принцип для всех видов квадрокоптеров
мини-дрон работает на полной скорости
Пальцем определите точную среднюю точку нашего мини-дрона
Используйте горячий клей, чтобы приклеить маленькую литий-полимерную батарею к раме
Подключите батарею к плате приемника кабель
Вот и все шаги по созданию этого дрона, теперь давайте посмотрим, как использовать этот мини-квадрокоптер
Как летать на игрушечном мини-дроне
Вставьте батареи в передатчик и включите кнопку питания
Держите дрон на плоской поверхности
Включите приемник (дрон) с помощью переключателя, расположенного на плате приемника
Вы должны услышать слабый звуковой сигнал
Потяните левый и правый джойстик к его правому нижнему концу, пока дрон не откалиброван, подтвердите то же самое, когда загорится индикатор от дрона мигает в течение нескольких секунд
Перемещение стика газа вверх и вниз приводит к вращению всех четырех пропеллеров
Медленно увеличивайте газ, чтобы ваш дрон взлетел
Используйте правый джойстик, чтобы перемещать дрон в разных направлениях
Медленно опустите ручку газа, чтобы наш дрон опустился на землю.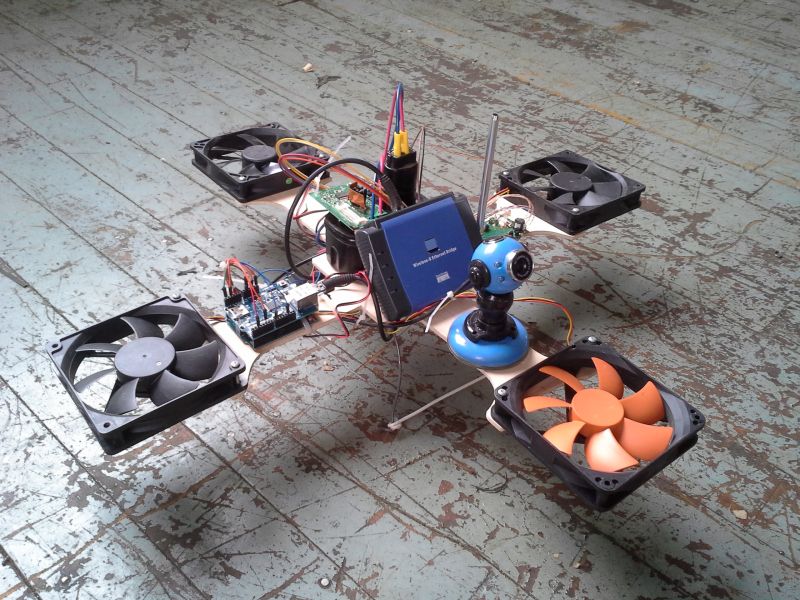
Теперь мы построили и запустили наш самый первый мини-дрон! Кроме того, это мини-игрушечный дрон, несмотря на его размер и безопасность с точки зрения использования, поскольку пропеллеры сделаны из пластика, а общий вес дрона очень мал, что очень удобно для использования в помещении.
Если вы совсем новичок в изготовлении дроны, лучше развивать навыки управления дронами, используя такие небольшие самодельные дроны, так как они имеют очень низкую цену и обладают всеми летными функциями настоящего дрона 9.0003
Профессиональный совет! Управление настоящими дронами без предварительного опыта в большинстве случаев приводит к катастрофе.
Я имею в виду самодельные беспилотные летательные аппараты большего размера с очень большими винтами и бесколлекторными двигателями, которые могут нести некоторую полезную нагрузку, обычно используемые полезные нагрузки — это камеры и дополнительные батареи для увеличения времени полета
Как я упоминал ранее, чем больше полезная нагрузка, тем выше уровень риска.