Содержание
Виды роботов и классификация в робототехнике
Новости / Роботы и дроны
Автор: Алексей Клёсов
Робототехника — широкое понятие, в котором есть разные направления. В них можно запутаться. В этой статье Промобот разбирает, какие из умных устройств можно назвать роботами, на какие виды они делятся и чем отличаются друг от друга.
Что вообще такое робот
В мире много разных умных устройств, но роботами являются далеко не все из них. Международный стандарт ISO 8373:2012 определяет робота как «приводной механизм, программируемый по двум и более осям, имеющий некоторую степень автономности, движущийся внутри своей рабочей среды и выполняющий предназначенные ему задачи».
То есть роботом можно назвать любое устройство или механизм, который выполняет предназначенные ему действия и одновременно отвечает трём условиям:
- SENSE: воспринимает окружающий мир с помощью сенсоров.
 Такими сенсорами могут быть микрофоны, камеры (всех областей электромагнитного спектра), различные электромеханические сенсоры, датчики и прочее.
Такими сенсорами могут быть микрофоны, камеры (всех областей электромагнитного спектра), различные электромеханические сенсоры, датчики и прочее. - THINK: понимает окружающий мир и строит модель поведения, чтобы выполнять предназначенные ему задачи.
- ACT: воздействует на физический мир.
 Такими сенсорами могут быть микрофоны, камеры (всех областей электромагнитного спектра), различные электромеханические сенсоры, датчики и прочее.
Такими сенсорами могут быть микрофоны, камеры (всех областей электромагнитного спектра), различные электромеханические сенсоры, датчики и прочее.Если хотя бы одно из условий не выполняется, то такое устройство нельзя назвать роботом. Например:
- Беспилотный автомобиль — робот.
- Sense: оснащён камерами и лидаром.
- Think: строит модели, понимает окружающий мир и принимает решения.
- Act: перевозит пассажиров или груз.
- Кофейный автомат — не робот.
- Sense: панель с кнопками или сенсорный дисплей.
- Think: – .
- Act: выдаёт кофе.
Каких видов бывают роботы
Существует принятое деление робототехники на типы в зависимости от общей прикладной области. Для этого используется классификация, предложенная в упомянутом выше стандарте ISO 8373:2012:
Для этого используется классификация, предложенная в упомянутом выше стандарте ISO 8373:2012:
- Промышленные роботы. Призваны выполнять задачи по автоматизации производства. Обычно это всевозможные манипуляторы. Например, в Новосибирске учёные разработали робота, который умеет сортировать бытовые отходы.
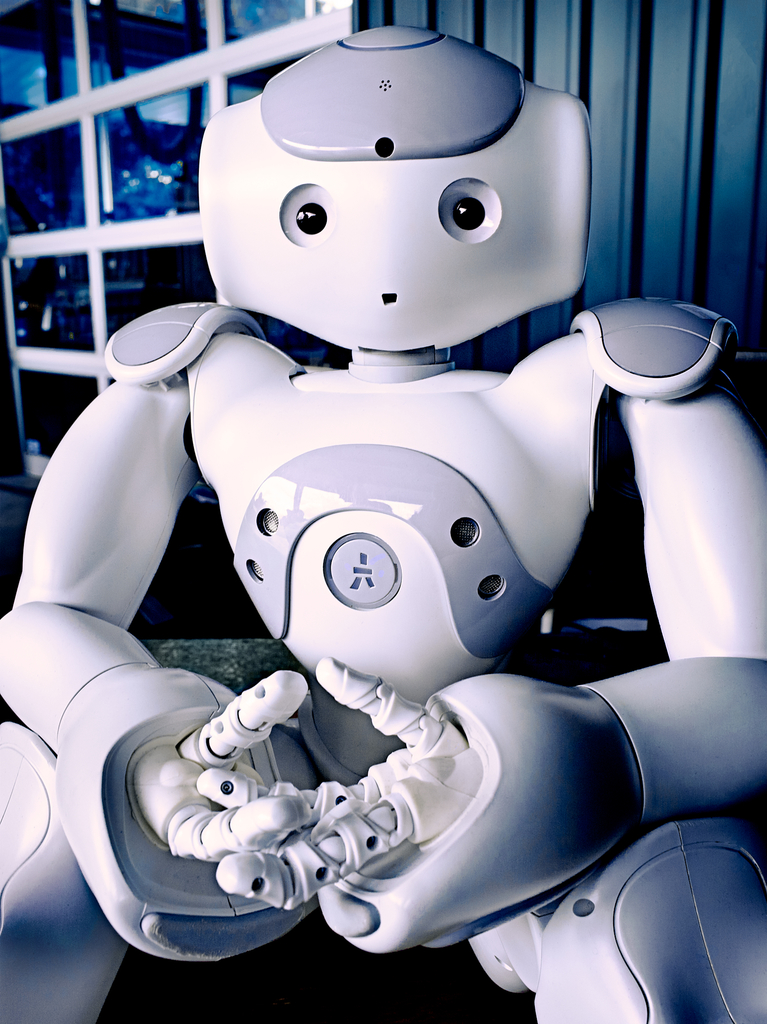
- Сервисные роботы. Призваны заменить или дополнить человека в решении типовых и рутинных задач в сфере обслуживания. Например, компания OrionStar выпустила робота-баристу Robotic Coffee Master, который умеет варить кофе на уровне мастера
Грубо говоря, промышленные роботы находятся в производственном цеху, а сервисные роботы — за его пределами.
Типы сервисных роботов
В соответствии с классификацией Международной федерацией робототехники (International Federation of Robotics — IFR) сервисная робототехника делится на два типа:
- Персональные. Используются в нашей повседневной жизни:
- Роботы-пылесосы.
- Кухонные роботы.
- Роботы-сиделки.
- Роботы-питомцы.
- Секс-роботы.
- Роботы-пылесосы.
- Профессиональные. Используются для извлечения выгоды при оказании различных услуг:
- Роботы-консультанты.
- Роботы-гиды.
- Роботы-администраторы.
- Роботы-курьеры.
- Роботы-диагносты.
Если для разных персональных задач требуются разные модели роботов, то под несколько профессиональных задач можно запрограммировать одну и ту же модель. Например, Promobot V.4 работает в МФЦ Челябинска, полицейским в Дубае, экскурсоводом в Москве и ещё во многих местах под разными должностями. На робота можно устанавливать разные дополнительные устройства: принтер, сканер для документов, банковский терминал и другие. Это помогает ему работать в разных сферах.
Резюмируем
- Устройство может называться роботом, если оно умеет воспринимать и понимать окружающий мир, а также на него воздействовать.
- Роботы могут быть промышленными и сервисными.
- Промышленные роботы помогают автоматизировать производство, а сервисные помогают людям в трудных и рутинных задачах.
- Сервисные роботы могут быть персональными и профессиональными.
- Персональные роботы используются в бытовых задачах, и под каждую нужна отдельная модель.
- Профессиональные роботы используются для бизнес-задач, и одну модель можно запрограммировать под разную функциональность.

Роботы. История роботов. Виды роботов. Классификация роботов.
Роботы.
Робот – это автоматическое устройство (машина), предназначенное для выполнения производственных и иных работ, и действий, способное частично или полностью заменить труд человека.
При этом робот может как иметь связь с оператором, получать от него команды (ручное управление), так и действовать автономно, в соответствии с заложенной программой (автоматическое управление).
Внешний вид и конструкция современных роботов могут быть весьма разнообразными, от увеселительных и прикладных и до сугубо производственных.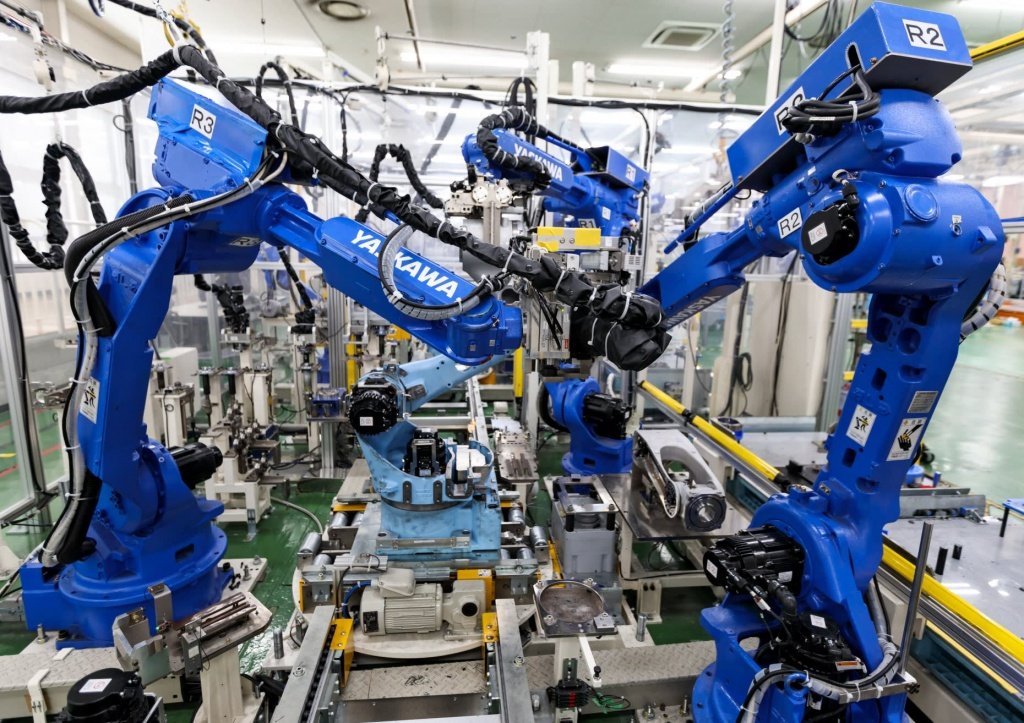 В промышленности широко применяются различные роботы, внешний вид которых (по причинам производственных требований и заложенных характеристик) различается.
В промышленности широко применяются различные роботы, внешний вид которых (по причинам производственных требований и заложенных характеристик) различается.
В информационных технологиях термин «роботы» используют также применительно к некоторым программам, примерами которых могут служить, например, поисковые роботы.
История роботов.
Идеи создания механических искусственных людей и животных существуют уже в древних мифах. Например, миф о Кадме, который, убив дракона, разбросал его зубы по земле, из зубов дракона выросли солдаты, или другой миф о Пигмалионе, который вдохнул жизнь в созданную им прекрасную статую — Галатею. И таких мифов множество.
Сведения о первых реальных прообразах современных роботов — механических людях с программным автоматическим управлением — относятся к эллинистической эпохе. Тогда на маяке, сооружённом на острове Фарос, установили четыре позолоченные женские фигуры. Днём они ярко светились в лучах солнца, а ночью освещались, так что всегда были хорошо видны издалека.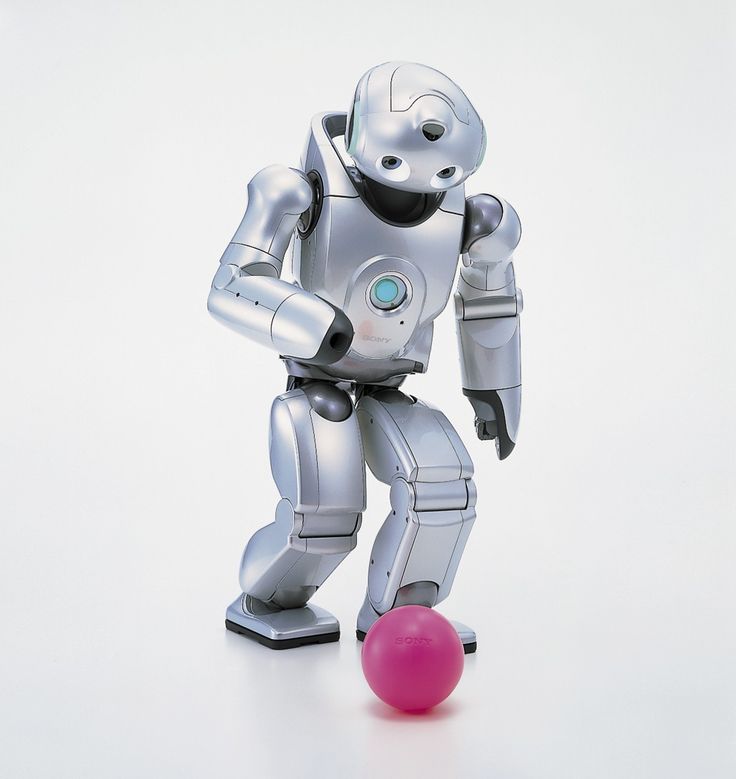 Эти статуи через определённые промежутки времени, поворачивались и отбивали склянки, в ночное же время они издавали трубные звуки, предупреждая мореплавателей о близости берега.
Эти статуи через определённые промежутки времени, поворачивались и отбивали склянки, в ночное же время они издавали трубные звуки, предупреждая мореплавателей о близости берега.
Прообразами роботов были также механические фигуры, созданные арабским учёным и изобретателем Аль-Джазари (1136—1206). Аль-Джазари создал лодку с четырьмя механическими музыкантами, которые играли на бубнах, арфе и флейте.
Чертежи человекоподобного робота создал Леонардо да Винчи примерно в 1495 году. Правда, неизвестно, пробовал ли Леонардо да Винчи построить своего робота.
В XVI-XVIII веках в Западной Европе стало популярным изготовление автоматонов (автоматов) — заводных механизмов, внешне напоминающих человека или животное.
Один из ранних автоматонов находится в коллекции Смитсоновского института — это «испанский монах» (примерно 40 см в высоту), способный передвигаться, ударять себя в грудь правой рукой и кивать головой, периодически он подносит находящийся в его левой руке деревянный крест к губам и целует его. Этот автомат был изготовлен примерно в 1560 году механиком Хуанело Турриано по заказу испанского императора Карла V.
Этот автомат был изготовлен примерно в 1560 году механиком Хуанело Турриано по заказу испанского императора Карла V.
С начала XVIII века в прессе начали появляться сообщения о машинах с «признаками разума», однако в большинстве случаев выяснялось, что это мошенничество. Внутри механизмов прятались живые люди или дрессированные животные.
В 1738 году французский механик и изобретатель Жак де Вокансон создал работающие автоматоны, которые играли на флейте, барабане и других инструметах.. Вокансон также изготовил механических уток, которые умели клевать корм и «испражняться».
Автоматы Вокансона.
Другим известным мастером по изготовлению автоматонов (механических кукл), жившим в 18-ом веке, был швейцарец Пьер Жаке Дроз.
Автоматоны Дроза: Писарь, Девушка музыкант, Художник.
Механические куклы-автоматоны изготавливались часовщиками вплоть до начала 20 столетия, теперь их делают крайне редко. Их главным недостатком является ограниченное время действия и слабость из-за особенностей пружинного заводного механизма. Однако открытие электричества, создание электродвигателей и систем автоматического управления, дало человечеству новые возможности в развитие более совершенных автоматов.
Их главным недостатком является ограниченное время действия и слабость из-за особенностей пружинного заводного механизма. Однако открытие электричества, создание электродвигателей и систем автоматического управления, дало человечеству новые возможности в развитие более совершенных автоматов.
В 1898 году Никола Тесла впервые продемонстрировал самоходную лодку, управляемую дистанционно с помощью радио. Одновременно вместо сложных механических приводов устройства начали обзаводиться более простыми, мощными и миниатюрными электрическими двигателями.
Уже к началу 20 века сформировались все условия, обусловившие создание первых роботов. Электрический ток стал не только источником питания, но и средством получения, передачи и обработки информации. Сложно сказать, когда появился первый робот в современном понимании этого слова. Многие компании и отдельные разработчики тех времен вели работу в области создания подобных машин. В 1920-1930 годы было разработано более 30 механизмов, которые вполне соответствовали требованиям полноценной робототехники.
Слово «робот» появилось в нашем лексиконе благодаря чешскому писателю Карелу Чапеку, оно впервые было использовано в пьесе Чапека «Р. У. Р.» «Россумские универсальные роботы» в 1920 году.
А первым человеком создавшим действующего робота, считают американского инженера Роя Уэнсли, который работал в корпорации Westinghouse Electric Company.
Разработанный Роем Уэнсли в 1928 году механизм под названием «Герберт Телевокс» представлял собой человекоподобную машину, способную открывать двери и окна, отключать духовку, электродвигатели и т. д. Важнейшим отличием этой машины от автоматонов являлось умение отвечать и реагировать на команды, подаваемые ему по телефону. При этом робот был не подключен к линии напрямую — он, подобно человеку, с помощью встроенного микрофона мог слушать команды. Из-за несовершенства технологий того времени эти команды представляли собой не обычную речь, а более простую последовательность гудков, писков, скрежетов и других звуков различной тональности.
Первенство Роя Уэсли оспаривают британец Уильям Ричардс и японец Макото Нисимура.
В 1928 году Уильям Ричардс создал Эрика. Этот механизм мог не только двигать конечностями, но и «осмысленно» отвечать на ряд вопросов, при этом даже умудряясь отпускать шутки.
В 1929 году Макото Нисимура создал свой управляемый по проводам антропоморфный механизм, высотой 3,2 метра, который получил название «Естествоиспытатель». Устройство Нисимура было способно по командам выполнять различные манипуляции руками, в частности писать.
Однако эти и многие другие роботы предназначались в основном для демонстрации научных достижений, а не для практической деятельности. Возникновение полноценной робототехники в производстве или сельском хозяйстве произошло позже, потому что такая автоматика требовала более высокого качественного уровня технологий.
В промышленности первые программируемые механизмы с манипуляторами появились в США в 1930-х годах. Толчком к созданию таких механизмов послужили работы Генри Форда по созданию автоматизированной производственной линии (конвейера) в 1913 году.
Уже, в 1948 году, в США компанией General Electric был создан первый промышленный робот для работы на атомном реакторе. Его особенностью было наличие обратной связи — оператор мог не только видеть его перемещение в рабочем пространстве, но и чувствовать силу, которую развивал захват манипулятора, что позволяло управлять механизмом более точно.
В середине 1950-х годов американец Джордж Девол основал компанию Unimation («Юнимейшн»), которая занималась выпуском первых серийных промышленных роботов, программируемых с помощью перфокарт.
Уже к середине 1960-х годов в развитых странах насчитывалось несколько десятков компаний, наладивших выпуск подобных машин. Больших успехов в таких разработках достигла Япония – закупив в 1968 году у «Юнимейшн» первые роботы, уже через 10 лет эта страна стала мировым лидером по выпуску собственных аналогов и оснащения ими производств.
Постепенно роботы проникли практически во все сферы деятельности.
Сегодня в промышленности, научных исследованиях, энергетике, медицине, развлечениях, военных действиях, в космосе — современные автоматические или дистанционно контролируемые механизмы используются очень широко.
Развитие роботов идет по нескольким направлениям — улучшение механизмов и приводов, совершенствование алгоритмов, внедрение самообучающихся систем управления (искусственного интеллекта), а также разработка новых интерфейсов «человек-компьютер».
Современная роботизация тесно переплетается с биотехнологиями и кибернетикой, результатом чего является создание кибернетических организмов (киборгов), функциональных бионических протезов, полностью автономных автомобилей, кораблей, космических и летательных аппаратов.
Классификация роботов.
Проводя анализ развития технологий в построении роботов, обычно употребляют термин «поколения» роботов:
— Роботы первого поколения — ранние модели автоматов, которые представляют собой программируемые манипуляторы.
— Роботы второго поколения — это автоматы, которые имеют датчики, собирают и анализируют информацию о среде.
— Роботы третьего поколения — это полностью автономные мобильные устройства, способные принимать решения в условиях значительной неопределённости.
По целевому назначению роботы разделяют на: промышленные, строительные, для сельского хозяйства, для транспортировки, бытовые, военные, охранные, медицинские, исследовательские и т.п.
По типу управления роботы подразделяются на:
— Машины, управляемые с помощью оператора.
Механизмы этого типа являются просто дистанционно управляемыми машинами (простейший пример — детский радиоуправляемый автомобильчик или вертолет).
— Машины полуавтономные.
Полуавтономные роботы могут выполнять самостоятельно часть операций, но в ключевых моментах все же требуется вмешательство человека.
— Машины полностью автономные.
Полностью автономные роботы весь спектр операций выполняют самостоятельно (например, манипуляторы автоматических сборочных линий).
По уровню мобильности роботов разделяют на следующие классы:
— Стационарные роботы.
Стационарные роботы — это те самые манипуляторы, которые все привыкли видеть, например, на автомобильных заводах.
— Мобильные роботы.
Мобильные роботы дополнительно делятся на шагающие, колесные либо на гусеничном ходу.
Преимущества роботов на производстве.
— Роботы могут работать и выполняют сложные производственные операции 24 часа в сутки.
— Роботы не болеют, не нуждаются в обеденном перерыве и отдыхе.
— Роботы не бастуют, не требуют повышения заработной платы и пенсии.
— Роботы менее, чем человек, подвержены вредным воздействиям окружающей среды.
— Роботы производят продукцию в соответствие с заданными параметрами качества.
Современные роботы.
Робот манипулятор на гусеничном ходу.
Робот андроид.
Современные боевые роботы.
Американский военный робот.
Российский ударный роботизированный комплекс «Платформа-М».
Роботы. История роботов. Классификация роботов. Виды роботов.
Женский сайт: Я-самая-красивая.рф (www.i-kiss.ru)
Робот | Определение, история, использование, типы и факты
Робот-гуманоид
Просмотреть все СМИ
- Ключевые люди:
- Родни Брукс
- Похожие темы:
- реабилитационный робот
три закона робототехники
андроид
механический манипулятор
промышленный робот
Просмотреть весь связанный контент →
Резюме
Прочтите краткий обзор этой темы
робот , любая автоматическая машина, которая заменяет человеческие усилия, хотя она может не напоминать человека по внешнему виду или выполнять функции, как человек. В более широком смысле робототехника — это инженерная дисциплина, занимающаяся проектированием, строительством и эксплуатацией роботов.
Понятие об искусственных людях появилось раньше письменной истории ( см. автомат ), но современный термин робот происходит от чешского слова robota («принудительный труд» или «крепостной»), использованного в пьесе Карела Чапека « R.U.R.». (1920). Роботы в пьесе были созданы людьми, бессердечно эксплуатируемыми владельцами фабрик, пока они не восстали и в конечном итоге не уничтожили человечество. Были ли они биологическими, как монстр из « Франкенштейна » (1818) Мэри Шелли, или механическими, не уточнялось, но механическая альтернатива вдохновила поколения изобретателей на создание электрических гуманоидов.
Узнайте о трех законах робототехники Айзека Азимова
Посмотреть все видео к этой статье
Слово робототехника впервые появилось в научно-фантастическом рассказе Айзека Азимова Runaround (1942). Наряду с более поздними рассказами Азимова о роботах, он установил новый стандарт правдоподобия в отношении вероятной сложности разработки разумных роботов и технических и социальных проблем, которые могут возникнуть. Runaround также содержал знаменитые Три закона робототехники Азимова:
Runaround также содержал знаменитые Три закона робототехники Азимова:
1. Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинен вред.
2. Робот должен подчиняться приказам, отдаваемым ему людьми, за исключением случаев, когда такие приказы противоречат Первому закону.
3. Робот должен защищать свое существование до тех пор, пока такая защита не противоречит Первому или Второму закону.
В этой статье прослеживается развитие роботов и робототехники. Для получения дополнительной информации о промышленном применении, см. артикул автоматика.
Викторина «Британника»
Гаджеты и технологии: правда или вымысел?
Виртуальная реальность используется только в игрушках? Использовались ли когда-нибудь роботы в бою? От компьютерных клавиатур до флэш-памяти — узнайте о гаджетах и технологиях в этой викторине.
Посмотрите, как мехатроника помогает инженерам создавать высокотехнологичные продукты, такие как промышленные роботы
Просмотреть все видео к этой статье
Машины с гибким поведением и некоторыми физическими свойствами, хотя и не гуманоидными, были разработаны для промышленности. Первым стационарным промышленным роботом был программируемый Unimate, гидравлическая тяжелая рука с электронным управлением, которая могла повторять произвольные последовательности движений. Он был изобретен в 1954 американским инженером Джорджем Деволом и был разработан компанией Unimation Inc., основанной в 1956 году американским инженером Джозефом Энгельбергером. В 1959 году прототип Unimate был представлен на литейном заводе General Motors Corporation в Трентоне, штат Нью-Джерси. В 1961 году Condec Corp. (после покупки Unimation в предыдущем году) поставила на завод GM первого в мире робота для производственной линии; у него была неприятная (для людей) задача по удалению и укладке горячих металлических деталей из машины для литья под давлением. Оружие Unimate продолжает разрабатываться и продаваться лицензиатами по всему миру, при этом автомобильная промышленность остается крупнейшим покупателем.
Первым стационарным промышленным роботом был программируемый Unimate, гидравлическая тяжелая рука с электронным управлением, которая могла повторять произвольные последовательности движений. Он был изобретен в 1954 американским инженером Джорджем Деволом и был разработан компанией Unimation Inc., основанной в 1956 году американским инженером Джозефом Энгельбергером. В 1959 году прототип Unimate был представлен на литейном заводе General Motors Corporation в Трентоне, штат Нью-Джерси. В 1961 году Condec Corp. (после покупки Unimation в предыдущем году) поставила на завод GM первого в мире робота для производственной линии; у него была неприятная (для людей) задача по удалению и укладке горячих металлических деталей из машины для литья под давлением. Оружие Unimate продолжает разрабатываться и продаваться лицензиатами по всему миру, при этом автомобильная промышленность остается крупнейшим покупателем.
Узнайте, как использование роботизированного конвейера для генетики бактерий делает работу ученых в Университетском колледже Корка менее сложной и более эффективной.
Просмотреть все видео к этой статье. в конце 1960-х и 1970-х годах в Массачусетском технологическом институте (MIT) и в Стэнфордском университете, где они использовались с камерами в исследованиях роботизированных рук и глаз. Виктор Шейнман из Стэнфорда, работая с Unimation для GM, разработал первую такую руку, используемую в промышленности. Называется PUMA (программируемая универсальная машина для сборки), они используются с 1978 для сборки автомобильных компонентов, таких как приборные панели и фары. PUMA широко копировалась, и ее потомки, большие и маленькие, до сих пор используются для легкой сборки в электронике и других отраслях промышленности. С 1990-х годов небольшие электрические манипуляторы стали важными инструментами в лабораториях молекулярной биологии, поскольку они точно манипулируют массивами пробирок и пипетируют сложные последовательности реагентов.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту.
Подписаться сейчас
Мобильные промышленные роботы также впервые появились в 1954. В том же году беспилотная электрическая тележка производства Barrett Electronics Corporation начала возить грузы по продуктовому складу в Южной Каролине. Такие машины, получившие название AGV (автоматически управляемые транспортные средства), обычно перемещаются по излучающим сигналы проводам, проложенным в бетонных полах. В 1980-х годах AGV приобрели микропроцессорные контроллеры, которые обеспечивали более сложное поведение, чем те, которые обеспечиваются простым электронным управлением. В 1990-х годах для использования на складах стал популярным новый метод навигации: AGV, оснащенные сканирующим лазером, триангулируют свое положение, измеряя отражения от фиксированных ретрорефлекторов (по крайней мере, три из которых должны быть видны из любого места).
В том же году беспилотная электрическая тележка производства Barrett Electronics Corporation начала возить грузы по продуктовому складу в Южной Каролине. Такие машины, получившие название AGV (автоматически управляемые транспортные средства), обычно перемещаются по излучающим сигналы проводам, проложенным в бетонных полах. В 1980-х годах AGV приобрели микропроцессорные контроллеры, которые обеспечивали более сложное поведение, чем те, которые обеспечиваются простым электронным управлением. В 1990-х годах для использования на складах стал популярным новый метод навигации: AGV, оснащенные сканирующим лазером, триангулируют свое положение, измеряя отражения от фиксированных ретрорефлекторов (по крайней мере, три из которых должны быть видны из любого места).
Хотя промышленные роботы впервые появились в США, бизнес там не процветал. Unimation была приобретена Westinghouse Electric Corporation в 1983 году и через несколько лет закрылась. Cincinnati Milacron, Inc., другой крупный американский производитель гидравлических манипуляторов, продал свое подразделение робототехники в 1990 году шведской фирме Asea Brown Boveri Ltd. единственная оставшаяся американская фирма. Иностранные лицензиаты Unimation, особенно в Японии и Швеции, продолжают работать, и в 19В 80-е годы другие компании в Японии и Европе начали активно выходить на рынок. Перспектива старения населения и связанная с этим нехватка рабочих рук побудили японских производителей экспериментировать с передовой автоматизацией еще до того, как она принесла явную отдачу, открыв рынок для производителей роботов. К концу 1980-х годов Япония, возглавляемая подразделениями робототехники Fanuc Ltd., Matsushita Electric Industrial Company, Ltd., Mitsubishi Group и Honda Motor Company, Ltd., была мировым лидером в производстве и использовании промышленных роботов. Высокая стоимость рабочей силы в Европе также способствовала внедрению роботов-заменителей: в 2001 году количество установок промышленных роботов в Европейском Союзе впервые превысило количество установок в Японии9.0003
единственная оставшаяся американская фирма. Иностранные лицензиаты Unimation, особенно в Японии и Швеции, продолжают работать, и в 19В 80-е годы другие компании в Японии и Европе начали активно выходить на рынок. Перспектива старения населения и связанная с этим нехватка рабочих рук побудили японских производителей экспериментировать с передовой автоматизацией еще до того, как она принесла явную отдачу, открыв рынок для производителей роботов. К концу 1980-х годов Япония, возглавляемая подразделениями робототехники Fanuc Ltd., Matsushita Electric Industrial Company, Ltd., Mitsubishi Group и Honda Motor Company, Ltd., была мировым лидером в производстве и использовании промышленных роботов. Высокая стоимость рабочей силы в Европе также способствовала внедрению роботов-заменителей: в 2001 году количество установок промышленных роботов в Европейском Союзе впервые превысило количество установок в Японии9.0003
Отсутствие надежной функциональности ограничило рынок промышленных и сервисных роботов (созданных для работы в офисе и дома). С другой стороны, игрушечные роботы могут очень надежно развлекаться, не выполняя задачи, а механические разновидности существуют уже тысячи лет. ( См. автомат.) В 1980-х годах появились игрушки с микропроцессорным управлением, которые могли говорить или двигаться в ответ на звуки или свет. Более продвинутые в 1990-х распознавали голоса и слова. В 19В 99 году корпорация Sony представила похожего на собаку робота по имени AIBO с двумя дюжинами моторов для приведения в действие его ног, головы и хвоста, двумя микрофонами и цветной камерой, координируемой мощным микропроцессором. Более реалистичные, чем когда-либо прежде, AIBO гонялись за цветными мячами и научились узнавать их владельцев, исследовать и адаптироваться. Хотя первые AIBO стоили 2500 долларов, первоначальный тираж в 5000 экземпляров сразу же был распродан через Интернет.
С другой стороны, игрушечные роботы могут очень надежно развлекаться, не выполняя задачи, а механические разновидности существуют уже тысячи лет. ( См. автомат.) В 1980-х годах появились игрушки с микропроцессорным управлением, которые могли говорить или двигаться в ответ на звуки или свет. Более продвинутые в 1990-х распознавали голоса и слова. В 19В 99 году корпорация Sony представила похожего на собаку робота по имени AIBO с двумя дюжинами моторов для приведения в действие его ног, головы и хвоста, двумя микрофонами и цветной камерой, координируемой мощным микропроцессором. Более реалистичные, чем когда-либо прежде, AIBO гонялись за цветными мячами и научились узнавать их владельцев, исследовать и адаптироваться. Хотя первые AIBO стоили 2500 долларов, первоначальный тираж в 5000 экземпляров сразу же был распродан через Интернет.
Робот | Определение, история, использование, типы и факты
Робот-гуманоид
Просмотреть все СМИ
- Ключевые люди:
- Родни Брукс
- Похожие темы:
- реабилитационный робот
три закона робототехники
андроид
механический манипулятор
промышленный робот
Просмотреть весь соответствующий контент →
Резюме
Прочтите краткий обзор этой темы
робот , любая автоматическая машина, которая заменяет человеческие усилия, хотя она может не напоминать человека по внешнему виду или выполнять функции, как человек. В более широком смысле робототехника — это инженерная дисциплина, занимающаяся проектированием, строительством и эксплуатацией роботов.
В более широком смысле робототехника — это инженерная дисциплина, занимающаяся проектированием, строительством и эксплуатацией роботов.
Понятие об искусственных людях появилось раньше письменной истории ( см. автомат), но современный термин робот происходит от чешского слова robota («принудительный труд» или «крепостной»), использованного в пьесе Карела Чапека руб. (1920). Роботы в пьесе были созданы людьми, бессердечно эксплуатируемыми владельцами фабрик, пока они не восстали и в конечном итоге не уничтожили человечество. Были ли они биологическими, как монстр из « Франкенштейна » (1818) Мэри Шелли, или механическими, не уточнялось, но механическая альтернатива вдохновила поколения изобретателей на создание электрических гуманоидов.
Узнайте о трех законах робототехники Айзека Азимова
Посмотреть все видео к этой статье
Слово робототехника впервые появилась в научно-фантастическом рассказе Айзека Азимова Runaround (1942). Наряду с более поздними рассказами Азимова о роботах, он установил новый стандарт правдоподобия в отношении вероятной сложности разработки разумных роботов и технических и социальных проблем, которые могут возникнуть. Runaround также содержал знаменитые Три закона робототехники Азимова:
Наряду с более поздними рассказами Азимова о роботах, он установил новый стандарт правдоподобия в отношении вероятной сложности разработки разумных роботов и технических и социальных проблем, которые могут возникнуть. Runaround также содержал знаменитые Три закона робототехники Азимова:
1. Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинен вред.
2. Робот должен подчиняться приказам, отдаваемым ему людьми, за исключением случаев, когда такие приказы противоречат Первому закону.
3. Робот должен защищать свое существование до тех пор, пока такая защита не противоречит Первому или Второму закону.
В этой статье прослеживается развитие роботов и робототехники. Для получения дополнительной информации о промышленном применении см. в статье автоматизации.
Британская викторина
Гаджеты и технологии: правда или вымысел?
Виртуальная реальность используется только в игрушках? Использовались ли когда-нибудь роботы в бою? От компьютерных клавиатур до флэш-памяти — узнайте о гаджетах и технологиях в этой викторине.
Посмотрите, как мехатроника помогает инженерам создавать высокотехнологичные продукты, такие как промышленные роботы
Просмотреть все видео к этой статье
Машины с гибким поведением и некоторыми физическими свойствами, хотя и не гуманоидными, были разработаны для промышленности. Первым стационарным промышленным роботом был программируемый Unimate, гидравлическая тяжелая рука с электронным управлением, которая могла повторять произвольные последовательности движений. Он был изобретен в 1954 американским инженером Джорджем Деволом и был разработан компанией Unimation Inc., основанной в 1956 году американским инженером Джозефом Энгельбергером. В 1959 году прототип Unimate был представлен на литейном заводе General Motors Corporation в Трентоне, штат Нью-Джерси. В 1961 году Condec Corp. (после покупки Unimation в предыдущем году) поставила на завод GM первого в мире робота для производственной линии; у него была неприятная (для людей) задача по удалению и укладке горячих металлических деталей из машины для литья под давлением. Оружие Unimate продолжает разрабатываться и продаваться лицензиатами по всему миру, при этом автомобильная промышленность остается крупнейшим покупателем.
Оружие Unimate продолжает разрабатываться и продаваться лицензиатами по всему миру, при этом автомобильная промышленность остается крупнейшим покупателем.
Узнайте, как использование роботизированного конвейера для генетики бактерий делает работу ученых в Университетском колледже Корка менее сложной и более эффективной.
Просмотреть все видео к этой статье. в конце 1960-х и 1970-х годах в Массачусетском технологическом институте (MIT) и в Стэнфордском университете, где они использовались с камерами в исследованиях роботизированных рук и глаз. Виктор Шейнман из Стэнфорда, работая с Unimation для GM, разработал первую такую руку, используемую в промышленности. Называется PUMA (программируемая универсальная машина для сборки), они используются с 1978 для сборки автомобильных компонентов, таких как приборные панели и фары. PUMA широко копировалась, и ее потомки, большие и маленькие, до сих пор используются для легкой сборки в электронике и других отраслях промышленности. С 1990-х годов небольшие электрические манипуляторы стали важными инструментами в лабораториях молекулярной биологии, поскольку они точно манипулируют массивами пробирок и пипетируют сложные последовательности реагентов.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту.
Подписаться сейчас
Мобильные промышленные роботы также впервые появились в 1954. В том же году беспилотная электрическая тележка производства Barrett Electronics Corporation начала возить грузы по продуктовому складу в Южной Каролине. Такие машины, получившие название AGV (автоматически управляемые транспортные средства), обычно перемещаются по излучающим сигналы проводам, проложенным в бетонных полах. В 1980-х годах AGV приобрели микропроцессорные контроллеры, которые обеспечивали более сложное поведение, чем те, которые обеспечиваются простым электронным управлением. В 1990-х годах для использования на складах стал популярным новый метод навигации: AGV, оснащенные сканирующим лазером, триангулируют свое положение, измеряя отражения от фиксированных ретрорефлекторов (по крайней мере, три из которых должны быть видны из любого места).
Хотя промышленные роботы впервые появились в США, бизнес там не процветал. Unimation была приобретена Westinghouse Electric Corporation в 1983 году и через несколько лет закрылась. Cincinnati Milacron, Inc., другой крупный американский производитель гидравлических манипуляторов, продал свое подразделение робототехники в 1990 году шведской фирме Asea Brown Boveri Ltd. единственная оставшаяся американская фирма. Иностранные лицензиаты Unimation, особенно в Японии и Швеции, продолжают работать, и в 19В 80-е годы другие компании в Японии и Европе начали активно выходить на рынок. Перспектива старения населения и связанная с этим нехватка рабочих рук побудили японских производителей экспериментировать с передовой автоматизацией еще до того, как она принесла явную отдачу, открыв рынок для производителей роботов. К концу 1980-х годов Япония, возглавляемая подразделениями робототехники Fanuc Ltd., Matsushita Electric Industrial Company, Ltd., Mitsubishi Group и Honda Motor Company, Ltd., была мировым лидером в производстве и использовании промышленных роботов. Высокая стоимость рабочей силы в Европе также способствовала внедрению роботов-заменителей: в 2001 году количество установок промышленных роботов в Европейском Союзе впервые превысило количество установок в Японии9.
Unimation была приобретена Westinghouse Electric Corporation в 1983 году и через несколько лет закрылась. Cincinnati Milacron, Inc., другой крупный американский производитель гидравлических манипуляторов, продал свое подразделение робототехники в 1990 году шведской фирме Asea Brown Boveri Ltd. единственная оставшаяся американская фирма. Иностранные лицензиаты Unimation, особенно в Японии и Швеции, продолжают работать, и в 19В 80-е годы другие компании в Японии и Европе начали активно выходить на рынок. Перспектива старения населения и связанная с этим нехватка рабочих рук побудили японских производителей экспериментировать с передовой автоматизацией еще до того, как она принесла явную отдачу, открыв рынок для производителей роботов. К концу 1980-х годов Япония, возглавляемая подразделениями робототехники Fanuc Ltd., Matsushita Electric Industrial Company, Ltd., Mitsubishi Group и Honda Motor Company, Ltd., была мировым лидером в производстве и использовании промышленных роботов. Высокая стоимость рабочей силы в Европе также способствовала внедрению роботов-заменителей: в 2001 году количество установок промышленных роботов в Европейском Союзе впервые превысило количество установок в Японии9.