Содержание
Эволюция робототехники timeline | Timetoast timelines
Первый промышленный робот был создан изобретателем самоучкой Джорджем Деволом. Робот весил две тонны и управлялся программой записанной на магнитном барабане. Создатели использовали гидравлические приводы, а точность манипулятора составляла 0,254мм. В результате был оформлен патент США № 2988237 и затем основана компания Unimation.
Именно Unimation Джорджа Девола принято считать родоначальником роботостроения.Первый в мире промышленный робот был внедрен на производственной линии завода General Motors, штат Нью-Джерси. Робот был задействован в процессах (перемещения) изделий при производстве кулис для переключения передач, а так же оконных ручек. Себестоимость технологии составляла около 65 000$, но Unimation продала его всего за 18 000$. Управляющая программа была записана на магнитном барабане вес которого составлял 1814 кг.
6 роботов Versatran от компании AMF (American Machines Foundry), были установлены на заводе Ford в Гуанчжоу, США.
 Название Versatran был определно от слов «versatile transfer».
Название Versatran был определно от слов «versatile transfer».Первый промышленный робот в Европе, был установлен на металлургическом предприятии — Uppsland Väsby, Швеция.
Создан первый промышленный робот манипулятор аналогичный человеческой руке
Компания Unimation подписывает соглашение с Японской корпорацией Kawasaki Heavy Industries, чтобы производить и продавать промышленные роботы на азиатских рынках. Именно Kawasaki принято считать пионером Японии в области робототехники. В 1969 году, Kawasaki выпустила первый промышленный робот, когда-либо созданный в Японии. Робот назывался — Unimate Kawasaki 2000.
Внедрение роботов Unimation для автоматизации контактной сварки на предприятии General Motors, США, позволило увеличить общую производительность завода, а так же значительно сократить тяжелую и опасную работу людей.
Первое техническое зрение для промышленных роботов, было продемонстрировано в Стэнфордском исследовательском институте
Норвежская корпорация Trallfa разработала первые промышленные покрасочные роботы для собственного потребления.
Основным толчком для развития данного направления послужила нехватка рабочей силы в этом периоде.Робот впервые смог определять габариты изделий и место их расположения.
Первая производственная линия с применением сварочных роботов в Европе, была поставлена компанией KUKA на завод Daimler Benz, Sindelfingen.
Была создана первая национальная ассоциация производителей промышленных роботов Японии –JIRA. Позже она была переименована в JARA.
KUKA разрывает соглашение об использовании роботов Unimate и приступает к разработке собственных роботов. Промышленный робот KUKA Famulus, был первым в мире шести-осевым манипулятором с применением электропривода для всех осей.
Stanford arm это роботизированная рука предназначенная для сборки небольших изделий с использованием датчиков касания и сенсоров обратного давления. Управление данным роботом осуществлялось с помощью мини-ЭВМ.
Позже, создатель данного робота профессор Шейман основал компанию Viacarm Inc для продвижения и реализации данной технологии на производственных предприятиях.По заказу компании Cincinnati Milacron Corporation, был создан первый в мире промышленный робот программируемый контроллером. Робот был назван T3.
Корпорация Kawasaki с использованием технологии Unimate, создала робот для автоматизации дуговой сварки рамы мотоциклов Kawasaki. Впервые в роботизированной сварки, были применены датчики касания и столкновения.
Промышленный робот IRB 6 от компании ASEA (будущая ABB), был первым манипулятором управление которым осуществлялось контроллером S1, в котором использовался 8-ми битный микропроцессор Intel. Объем памяти процессора, составлял 16Кб. S1 имел 16 цифровых входов/выходов и программировался с помощью 16 клавиш и четырехразрядный цифровой дисплей.
С появлением спроса в автомобильной промышленности на роботы с более высокой грузоподъемностью, компания ABB создала первый в мире промышленный робот с полезной нагрузкой до 60 кг.
Впервые данный робот был использован на заводе Saab, Швеция.Рука робота впервые была применена в космических зондах Viking 1 и 2.
Создан первый промышленный шестиосевой робот Reis с собственным контроллером RE15.
При поддержки General Motors, были внедрены роботы PUMA (Unimation/Vicarm) для автоматизации сборочных процессов. Это позволило сократить значительную часть людей занятых в подобных операциях.
В 1978 Хироши Макино из университета Яманаси, Япония, разработал робота-SCARA. Это был технологический прорыв, поскольку именно роботы Scara были оптимальным решением для некоторых технологических операций связанных с быстрым перемещением изделий.
Задачи по автоматизации точечной сварки, открыли новую эру в робототехнике с применением электро-редукторов, пришедшим на смену гидравлическим приводам. Компания Nachi, Япония разработали первый робот на базе редукторов.
Портальные роботы предоставляет гораздо большую досягаемости, чем классические роботы с основанием, и могут заменить сразу несколько таких роботов.
Финская компания Nokia приступила к производству промышленных роботов по лицензии Unimation. В 1980-ых годах было выпущено около 1500 роботов с торговым названием Puma, среди них была популярная модель Puma-560.
Специально для роботизированных предложений, IBM создал мощный и легко применимый язык программирования.
Компания Adept предстала на рынке новый тип роботов SCARA с применением электродвигателей. Новая конструкция сделала роботы более простыми и надежными, сохранив высокую скорость.
Новая Z форма, значительно добавила гибкости и универсальности манипулятору обеспечивая три поступательных и три вращательных движения. Именно эту конфигурацию применяют большинство производителей в настоящее время.
Первые кто использовал собственные промышленные роботы для создания роботов, была компания Fanuc.
S4 значительно значительно облегчил создание рабочих программ робота за счет удобного внешнего интерфейса.
Motoman создал первый контроллер (MRC), который обеспечил синхронное управление двумя роботами и управление до 21 оси. MRC так же позволил редактировать программы с помощью обычного персонального компьютера.
Впервые контроллер предложил пользователю понятный интерфейс Windows, а так же 6d мышку для упрощения и ускорения процессов создания управляющих программ.
ABB создала самого быстрого робота впервые применив Дельта дизайн, или как сегодня называют дизайн-паука. Этот робот получил название FlexPicke, а имея его создателя Реймон Клавел. Этот робот был способен переместить 120 изделий в минуту, а скорость его перемещения достигала 10 метров/сек.
Миссия Mars Exploration Rover началась в 2003 году с момента отправки из двух роботизированных марсоходов, для исследования Марса и геологии.
KUKA первый из производителей промышленных роботов представила Аттракцион получивший название Robocoaster. Robocaster применяется в парках развлечения и специализируется на экстремальном вращении любителей острых ощущений.
Motoman, Япония представил улучшенный контроллер (NX100), который обеспечивал синхронное управление четырьмя роботами, до 38 осей. NX100 получил сенсорный экран и базировался на операционной системе WindowsCE.
KUKA, совместно с DLR (Институт робототехники и мехатроники, Германия) создали первый робот из алюминия, который при грузоподъемности 7 кг имел вес 16 кг. Первый аналогичный робот со схожими характеристиками весил 2000 кг.
Motoman, Япония произвел первого человекоподобного робота с 13 осями.
Данный робот очень хорошо проявил себя в операциях по сборке изделий.KUKA первая в мире создала промышленный робот грузоподъемностью 1000 кг. Он значительно расширил границы применения промышленных роботов, фактически создав новый класс в досягаемости и грузоподъемности.
В 2007 году Fanuc M-2000iA стал самым грузоподъемным и досягаемым промышленным роботом в мире. Его запястье позволяло удерживать изделия весом до 1200 кг.
Yaskawa Motoman, Япония, представила улучшенный контроллер (DX100), который обеспечил синхронное управление до восьми роботов, до 72 осей
Первый робот-гуманоид Robonaut (R2B) был отправлен на Международную космическую станцию.
 Название Versatran был определно от слов «versatile transfer».
Название Versatran был определно от слов «versatile transfer». Основным толчком для развития данного направления послужила нехватка рабочей силы в этом периоде.
Основным толчком для развития данного направления послужила нехватка рабочей силы в этом периоде. Позже, создатель данного робота профессор Шейман основал компанию Viacarm Inc для продвижения и реализации данной технологии на производственных предприятиях.
Позже, создатель данного робота профессор Шейман основал компанию Viacarm Inc для продвижения и реализации данной технологии на производственных предприятиях. Впервые данный робот был использован на заводе Saab, Швеция.
Впервые данный робот был использован на заводе Saab, Швеция.


 Данный робот очень хорошо проявил себя в операциях по сборке изделий.
Данный робот очень хорошо проявил себя в операциях по сборке изделий.История искусственного интеллекта
Книгопечатание в Европе
История macOS
История зарубежного телевидения
История зарубежного телевидения_Артёмова
Technology development on a planet Earth
samsung history
История развития зарубежного телевидения
История телевидения
Эволюция робототехники
История игровых приставок
Эволюция робототехники
История телевидения
Mercedes-Benz. История компании
История компании
Модный дом Prada
Человекоподобные роботы)
История зарубежного телевидения
Развитие компьютерной графики
История CorelDRAW
Компьютерная графика
История компьютерных игр
Лента времени на тему «История создания компьютерных игр»
Развитие железнодорожного транспорта
История развития хранения информации
История создания компьютерных игр
Я жевачка Бабл Блю
История развития телевещания
История зарубежного телевидения
Средства получения видеоинформации
Автомобили
История искусственного интеллекта
История робототехники. Происхождение первых роботов
История автоматизированных механизмов насчитывает тысячи лет, от роботов — слуг богов, упоминаемых в греческой мифологии, до сложных китайских астрономических водяных башенных часов XI века. Даже Леонардо да Винчи разработал ряд автоматов, включая самоходные тележки и роботов-рыцарей. Итак, когда же автоматизированные машины стали роботами?
Даже Леонардо да Винчи разработал ряд автоматов, включая самоходные тележки и роботов-рыцарей. Итак, когда же автоматизированные машины стали роботами?
Современная эпоха робототехники началась во время промышленной революции, с началом использования пара и электричества, проложившими дорогу силовым двигателям и механизмам. Изобретения и открытия, сделанные Томасом Эдисоном и Николой Тесла, способствовали переходу в новую эру робототехники. В 1898 году Тесла представил свою радиоуправляемую лодку, похваставшись, что стал первым в будущей гонке роботов. Многие считают это событие датой рождения робототехники.
Тем не менее слово «робот» не использовалось вплоть до 1920 года, когда чешский драматург Карел Чапек написал научно-фантастическую пьесу «R. U. R.», описывающую восстание роботизированных рабочих фабрики против людей-владельцев. А в 1941 году не менее известный писатель-фантаст Айзек Азимов придумал термин «робототехника», упомянув его в коротком рассказе «Лжец!».
Спустя полгода Азимов написал рассказ «Хоровод», в котором с оптимизмом характеризовал роботов как полезных слуг человека. В этом же рассказе впервые упоминаются «три закона робототехники» Азимова, которые продолжают влиять на литературу, кино и науку по мере продолжения исследований в области искусственного интеллекта.
В этом же рассказе впервые упоминаются «три закона робототехники» Азимова, которые продолжают влиять на литературу, кино и науку по мере продолжения исследований в области искусственного интеллекта.
Ключевые изобретения XX века, включая цифровой компьютер, транзистор и интегральную схему, привели к тому, что ученые смогли начать разработку электронного, программируемого мозга для роботов. Промышленные роботы сейчас — обычное явление на современном производстве. Они используются для решения самых разнообразных задач — от транспортировки материалов до сборки деталей.
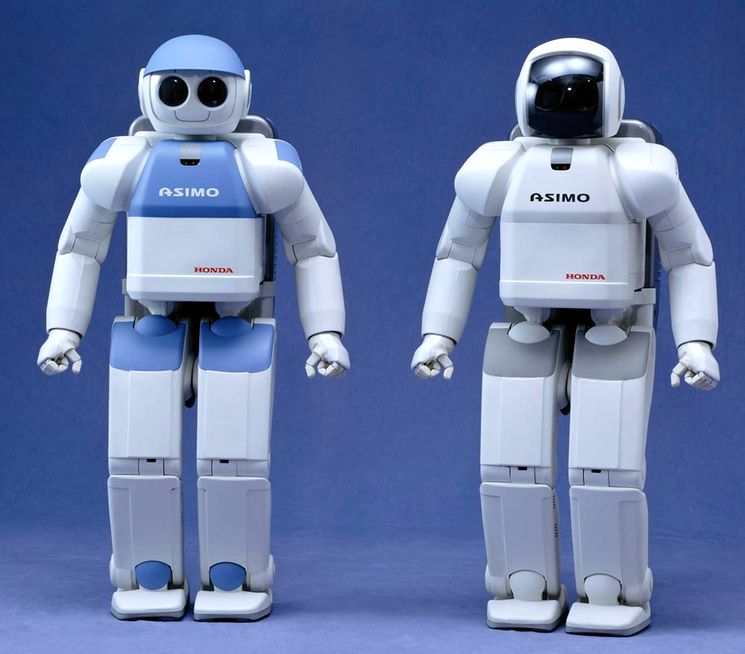
В биомедицинской, обрабатывающей, транспортной, космической и оборонной промышленности роботы используются намного чаще, чем раньше. Значительные достижения в области программного обеспечения и искусственного интеллекта (ИИ) привели к созданию роботов, имитирующих базовую форму и взаимодействие людей, таких как двуногий «Асимо» корпорации Honda. Суперкомпьютер IBM Watson, оснащенный продвинутой системой ИИ, был первоначально разработан для соревнования с людьми на американской викторине Jeopardy!, в которой победил, а затем поступил в коммерческую эксплуатацию в качестве врача-диагноста онкологических заболеваний.
Четырехногий робот «БигДог» компании Boston Dynamics создан для перемещения по пересеченной местности и способен перевозить тяжелые грузы. Современные системы автопилотирования, интегрированные в самолеты, беспилотные автомобили и даже космические планетоходы, такие как «Кьюриосити», блуждавший по поверхности Марса, демонстрируют, насколько сложными стали программируемые роботы.
Робот «БигДог»
Роботы больше не ассоциируются с греческими мифами или голливудскими блокбастерами. Дроиды, беспилотные летательные аппараты и роботы теперь широко распространенная и важная часть нашего общества.
Первый медицинский робот
Первое официально зарегистрированное применение медицинского робота относится к 1984 году, когда «Артробот», разработанный в Ванкувере Джефом Окинлеком и доктором Джеймсом Мак-Уэном в сотрудничестве с хирургом Брайаном Дэйем, использовался при проведении ортопедической операции.
Роботизированный хирургический комплекс «да Винчи» позволяет выполнять сложнейшие операции в больницах по всему миру.
«Артробот» — небольшой робот для выполнения артропластики тазобедренного сустава (операции по восстановлению функции сустава). Он был спроектирован для точного сверления тазобедренных суставов, с возможностью программирования для создания полостей в определенных позициях и под определенным углом для последующей имплантации протезов.
Несмотря на то что небольшие и относительно простые усовершенствования и модификации оригинального «Артробота» привели к использованию роботов в более сложных хирургических операциях, таких, как полная замена коленного сустава, подобные новаторские решения в области медицинской робототехники таковыми и оставались вплоть до 1997 года, пока медицинские роботы не получили распространение.
Система «да Винчи» корпорации Intuitive Surgical Inc стала первым хирургическим роботом, получившим одобрение Управления по контролю за качеством пищевых продуктов и лекарственных препаратов США. Робот «да Винчи» представляет собой полноценный хирургический комплекс с набором инструментов, камерами, датчиками и прочими принадлежностями.
Знаете ли вы? В 1998 году в Лейпциге было осуществлено первое в мире аортокоронарное шунтирование сердца с использованием хирургического комплекса «да Винчи».
Первый военный робот
Изобретенная в 1898 году Николой Тесла радиоуправляемая лодка, предназначенная для использования в военных целях и предлагаемая США с Великобританией, так и не была разработана.
Танк Т-26,набазе которого был создан телетанк ТТ-26
Во Второй мировой войне впервые были применены военные роботы в виде дистанционно управляемых беспилотных машин — немецкой самоходной мины «Голиаф» и советского танка «Телетанк». Телетанки были созданы на базе легких танков T-26, оснащенных гидравликой и аппаратурой телеуправления. Телетанки несли пулемет, огнемет, а также оборудование для установки дымовой завесы и использования химического оружия, что означало, что они были грозным орудием на поле боя. Немецкие «Голиафы», с другой стороны, были спроектированы как мобильные наземные мины, которых на удаленном управлении можно было подвести к вражеской технике или пехоте и детонировать.
Хотя и «Голиаф», и «Телетанк» были разработаны в одно и то же время, советские безэкипажные танки стали использоваться первыми и применялись во время Советско-финской войны (1939– 1940) в Восточной Финляндии.
Первый гуманоидный робот
Человекоподобные роботы, часто называемые андроидами в научной фантастике, проектируются с учетом человеческих форм. Простые гуманоидные автоматоны создавались испокон веков и постепенно совершенствовались для более точной имитации внешнего вида и поведения человека. Одним из первых задокументированных примеров является механический рыцарь Леонардо да Винчи.
Робот-рыцарь Леонардо управлялся комбинацией шкивов и тросов, которые позволяли ему стоять, сидеть и независимо двигать руками. Он имел человеческую форму и даже был одет в доспехи, словно рыцарь. Хотя механизм да Винчи примитивен по сегодняшним меркам, ему не хватает искусственного интеллекта и дистанционного управления, но он опережал свое время в XV веке.
Да Винчи использовал во многих своих изобретениях шкивы, гири и шестерни, в том числе и в самоходной тележке, которую многие считают первым роботом.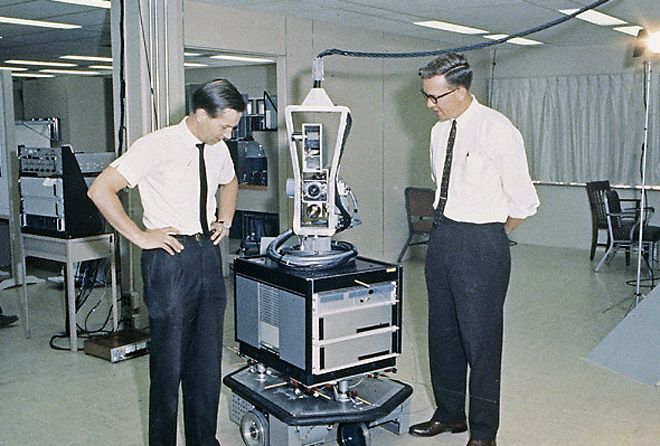 Позже он занялся дизайном робота-рыцаря для королевского театрализованного представления в Милане, которое состоялось в конце 1490-х годов.
Позже он занялся дизайном робота-рыцаря для королевского театрализованного представления в Милане, которое состоялось в конце 1490-х годов.
Чертежи робота-рыцаря Леонардо да Винчи до сих пор используются современными робототехниками и даже вносят свою лепту в разработку роботов для NASA.
Первый роботизированный транспорт
После Всемирной выставки 1964 года писатель-фантаст Айзек Азимов в своих записях предсказал, что спустя 50 лет автомобили будут управляться «робомозгами». В течение многих лет после этого беспилотные транспортные средства существовали лишь в виде теоретических концепций и исследовательских проектов.
Компания Mercedes-Benz с 1980-х годов занимается исследованиями в области беспилотных транспортных средств
Настоящий прогресс начался в 1986 году, когда в Мюнхенском университете был запущен проект PROMETHEUS под управлением Европейского агентства координации исследований (EUREKA, European Research Coordination Agency). В течение почти десятилетия команда разработчиков трудилась над проектом беспилотного автомобиля под названием VITA, оборудованного датчиками, позволяющими регулировать скорость машины при обнаружении опасности.
В 1994 году автомобиль VITA совершил 1000-километровую поездку по парижскому шоссе в условиях плотного трафика, достигнув скорости в 128 километров в час. Позднее некоторые аспекты VITA были учтены при конструировании будущих автомобилей Mercedes-Benz.
Первый космический робот
Можно сказать, что «Спутник-1», запущенный СССР в 1957 году, стал первым роботом в космосе. А «Робонавт», разработанный в сотрудничестве General Motors с NASA, получил звание первого гуманоидного робота в космосе и первого робота для работы с инструментами, созданными для людей, в космосе. В настоящее время он трудится на Международной космической станции (МКС).
Проект «Robonaut 2» нацелен на создание гуманоидной машины, способной на совместную работу с космонавтами, чтобы выполнять
трудные и опасные задачи по обслуживанию и ремонту техники в открытом космосе.
«R1», первый вариант «Робонавта», был прототипом, разработанным с целью исследовать, как гуманоидные роботы могли бы помочь астронавтам в открытом космосе. Его преемник «R2» оборудован полноценным роботизированным экзоскелетом, современной системой технического зрения, программным обеспечением для распознавания изображений, датчиками и алгоритмами управления, а также роботизированными руками. Он помогает в работе космонавтам, чтобы сэкономить их силы. Кроме того, «Робонавт» проходит в Хьюстоне подготовку к выполнению медицинских процедур, включая использование шприцев и проведение ультразвукового сканирования.
Его преемник «R2» оборудован полноценным роботизированным экзоскелетом, современной системой технического зрения, программным обеспечением для распознавания изображений, датчиками и алгоритмами управления, а также роботизированными руками. Он помогает в работе космонавтам, чтобы сэкономить их силы. Кроме того, «Робонавт» проходит в Хьюстоне подготовку к выполнению медицинских процедур, включая использование шприцев и проведение ультразвукового сканирования.
«Робонавт 2» покрыт мягким материалом и запрограммирован на остановку в случае касания человека, чтобы избежать его травмирования.
Первый промышленный робот
Первый промышленный робот был внедрен на производственной линии завода General Motors в 1961 году. «Юнимейт» представлял собой мощную роботизированную руку для установки литых металлических изделий и сварных компонентов на шасси автомобиля. Это был первый робот-манипулятор, который помог ускорить производственные линии на заводах по всему миру.
Первоначальная стоимость манипулятора «Юнимейт» составила 25 000 долларов. У робота было шесть программируемых осей движения, а конструкция позволяла работать с тяжелыми объектами на высокой скорости. Манипулятор весом 1,8 тонны оказался чрезвычайно универсальным и вскоре стал одним из самых популярных промышленных роботов в мире.
«Юнимейт» стал популярным и вне промышленного производства, приняв участие в «Вечернем шоу Джонни Карсона», в котором он разливал пиво и даже дирижировал оркестром.
Джордж Девол, первым разработавший промышленного программируемого робота в 1954 году, основал первую в мире компанию по производству роботов, Unimation. Роботы стали обычным явлением на современных сборочных линиях, так как их способность выполнять повторяющиеся задачи на высокой скорости превращает их в идеальные средства производства.
Первый беспилотный робот
Дроны, или беспилотные летательные аппараты (БПЛА), использовались в течение сотен лет. Первое задокументированное применение датируется 1849 годом, когда австрийская армия запустила аэростаты, оснащенные бомбами, в сторону осажденной Венеции.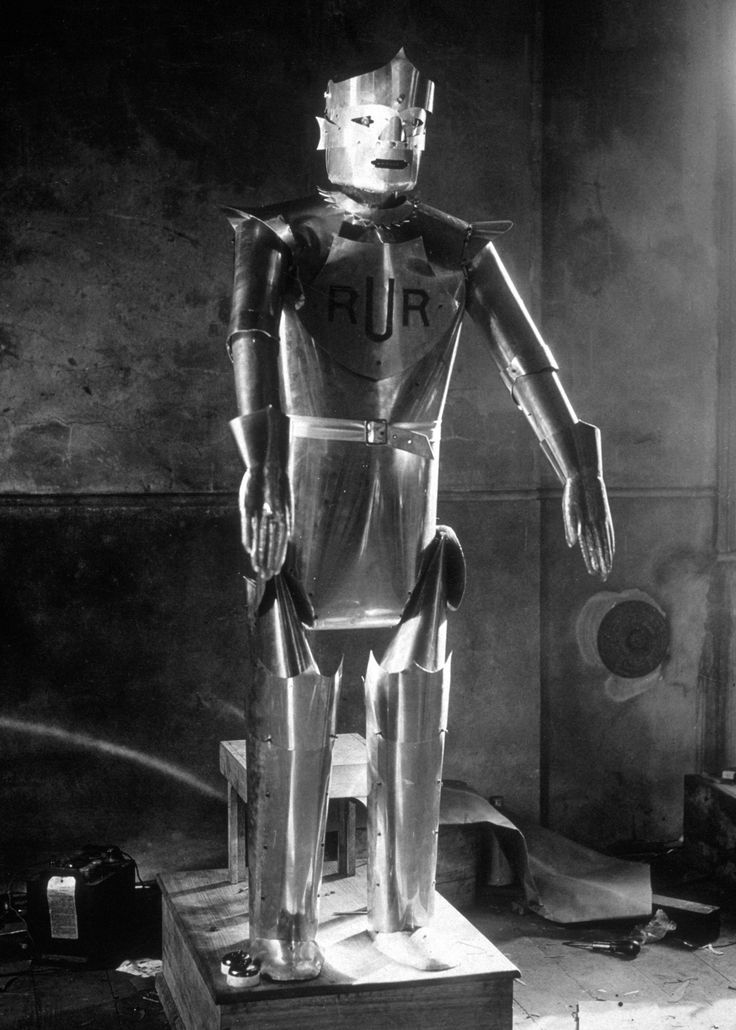 Военные исследования в XX столетии привели к появлению ряда технологических инноваций, включая систему глобального позиционирования (GPS) и Интернет.
Военные исследования в XX столетии привели к появлению ряда технологических инноваций, включая систему глобального позиционирования (GPS) и Интернет.
Это привело к созданию первого полностью автономного беспилотного летательного аппарата в 1973 году. Израильский дрон Tadiran Mastiff был оборудован системой передачи данных, позволяющей в автоматическом режиме и реальном времени вести высококачественную видеосъемку места полета и транслировать ее оператору. Эти БПЛА предварительно программировались на траекторию полета и широко использовались армией обороны Израиля.
Современные военные беспилотники, такие как «Предатор» и «Таранис», играют ключевую роль на поле боя.
Поделиться ссылкой
Отец робототехники? | Университетская библиотека
Знаете ли вы, кого считают «отцом робототехники»? Слово «робототехника» впервые было придумано Айзеком Азимовым в 1941 году, но сама концепция существует намного дольше. Если вы думаете о Леонардо да Винчи, вы близки. Рисунки, оставленные Леонардо, сделанные около 1495 года, изображают первые зарегистрированные конструкции человекоподобного робота, но кто-то другой сделал это до него. Концепции, похожие на робота, можно найти еще в 4 веке до нашей эры, когда греческий математик Архит из Тарента постулировал механическую птицу, которую он назвал «Голубь», которая приводилась в движение паром. Первым, кто построил программируемого робота-гуманоида, был Аль-Джазари в 1206 году.0003
Концепции, похожие на робота, можно найти еще в 4 веке до нашей эры, когда греческий математик Архит из Тарента постулировал механическую птицу, которую он назвал «Голубь», которая приводилась в движение паром. Первым, кто построил программируемого робота-гуманоида, был Аль-Джазари в 1206 году.0003
Согласно Википедии, Ибн Исмаил ибн аль-Раззаз Джазари (по-арабски: Аль-Джазари) был арабским мусульманским ученым, изобретателем и инженером-механиком во времена Золотого века ислама (Средние века). Хотя даты его рождения и смерти меняются почти в каждой статье, написанной о нем, другие подробности о его жизни и работе известны лучше. Аль-Джазари известен не только как «отец робототехники», он также задокументировал 50 механических изобретений (вместе со строительными чертежами) и считается «отцом современной инженерии». Изобретения, которые он упоминает в своей книге, включают кривошипно-шатунный механизм, шатун, программируемый автомат, человекоподобный робот, поршневой двигатель, всасывающую трубу, всасывающий насос, насос двойного действия, клапан, кодовый замок, кулачок, распределительный вал, сегментную шестерню, первую механические часы, приводимые в движение водой и гирями, и особенно коленчатый вал, который считается самым важным механическим изобретением в истории после колеса. Неплохо для парня, жившего 800 лет назад!
Неплохо для парня, жившего 800 лет назад!
Аль-Джазари также отметил в своем тексте ряд приемов розыгрыша. Некоторые из них представляли собой хитроумные сосуды для питья, которые, казалось, содержали воду, но не могли быть опорожнены. Другие выглядели пустыми, но при опрокидывании производили воду.
Исторический канал в настоящее время транслирует передачу «Древние открытия: Машины Востока», в которой содержится информация об Аль-Джазари. DVD с этой программой можно взять в Медиацентре библиотеки парков или просмотреть списки программ, чтобы узнать, когда планируется ее повторный запуск: http://www.thehistorychannel.co.uk/site/tv_guide/listings.
В библиотеке парков также есть следующие родственные книги:
Книга знаний об изобретательных механических устройствах (это перевод оригинального текста Аль-Джазари, написанного в 1206 году)
Телефонный номер: TJ144 .J3913 1974
Наука и ее времена: понимание социальной значимости научных открытий (том 2 содержит информацию об Аль-Джазари)
Номер телефона: Q175.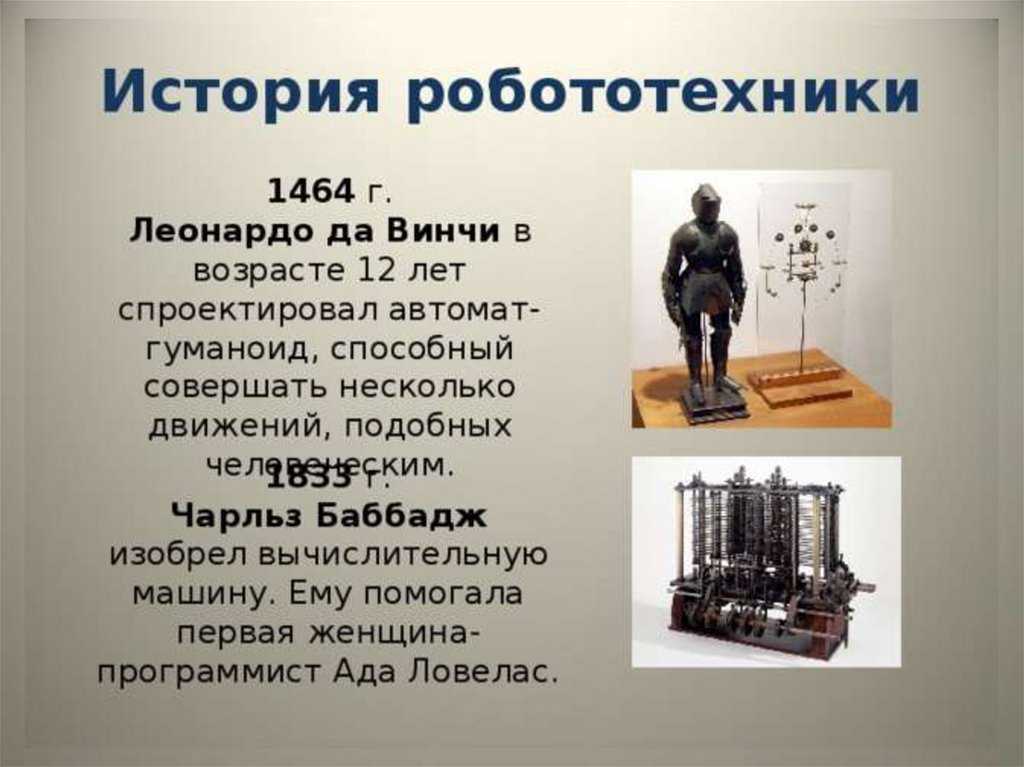 46 S35 2000
46 S35 2000
История инженерного дела в классические и средневековые времена
Номер телефона: TA15 H54x, 1984
Статья в Википедии по адресу: http://en.wikipedia.org/wiki/Al-Jazari
Полнотекстовый доступ к правительственным отчетам
База данных Reports Technical & Scientific) Национальной службы технической информации (NTIS) обеспечивает полнотекстовый доступ примерно к 240 000 документов, опубликованных в 1964-2000 годах из самых разных государственных учреждений. NTIS публикует отчеты почти по всем предметным областям, естествознанию, социальным наукам и даже некоторым гуманитарным наукам. Все проекты, финансируемые за счет средств правительства США на исследования, должны иметь какой-либо опубликованный отчет. Подавляющее большинство из них доступны через NTIS. DARTS — это бета-проект, позволяющий сделать научные отчеты доступными в онлайновом режиме в полнотекстовом виде.
В настоящее время DARTS находится в стадии бета-тестирования и доступен только из библиотеки парков. Для доступа к нему требуется идентификатор пользователя и пароль. Чтобы получить доступ к этой базе данных, обратитесь в службу поддержки и информации библиотеки парков.
Для доступа к нему требуется идентификатор пользователя и пароль. Чтобы получить доступ к этой базе данных, обратитесь в службу поддержки и информации библиотеки парков.
Пищевой химический кодекс 5 -е издание [Электронный ресурс]
Библиотека получила электронный доступ к последнему изданию Пищевого химического кодекса. Этот инструмент был опубликован Национальной академией наук; однако будущие выпуски будут опубликованы Фармакопея США (USP). Кодекс пищевых химикатов (FCC) представляет собой сборник стандартов, обеспечивающих качество и безопасность пищевых добавок, таких как питательные вещества, консерванты, ароматизаторы и красители. FCC была разработана в конце 1950-х годов после принятия поправки 1958 года о пищевых добавках к федеральному закону о пищевых продуктах, лекарствах и косметике. Он обновлялся в 1966, 1972, 1981, 1996 и 2003 годах. Пятое издание и дополнения к нему представляют собой всесторонний пересмотр с существенными изменениями в спецификациях пределов содержания тяжелых металлов, особенно свинца. В этом выпуске представлены 52 новые статьи о пищевых добавках и 48 новых статей об ароматизаторах. Каждая запись содержит физическое описание вещества и его использование в пищевых продуктах, перечисляет требования к его чистоте, описывает соответствующие тесты для определения соответствия, а также предоставляет рекомендации по упаковке и хранению. Чтобы получить доступ к этой электронной книге — перейдите по адресу:
В этом выпуске представлены 52 новые статьи о пищевых добавках и 48 новых статей об ароматизаторах. Каждая запись содержит физическое описание вещества и его использование в пищевых продуктах, перечисляет требования к его чистоте, описывает соответствующие тесты для определения соответствия, а также предоставляет рекомендации по упаковке и хранению. Чтобы получить доступ к этой электронной книге — перейдите по адресу:
http://www.lib.iastate.edu/collections/jourbook/etext_name.html
10 первых роботов, изменивших мир
В 1898 году Тесла представил свою радиоуправляемую лодку, которая, по его словам, была первой в будущей гонке роботов. Многие, в том числе и я, считают это событие рождением робототехники.
Однако слово «робот» не использовалось до 1921 года, когда чешский драматург Карл Чапек написал R.U.R (Универсальные роботы Россум). История робототехники насчитывает сотни лет, вот сводка первых роботов, которые изменили мир, в котором мы живем. .
1. Первый робот-гуманоид : Один из первых хорошо задокументированных роботов-гуманоидов — механический рыцарь Леонардо да Винчи. Он приводился в действие серией шкивов и тросов, которые позволяли ему стоять, сидеть и независимо двигать руками.
Первый робот-гуманоид : Один из первых хорошо задокументированных роботов-гуманоидов — механический рыцарь Леонардо да Винчи. Он приводился в действие серией шкивов и тросов, которые позволяли ему стоять, сидеть и независимо двигать руками.
Леонардо да Винчи «Робот-рыцарь» — 1495 год
2. Первый военный робот: Во время Второй мировой войны военные роботы впервые использовались в виде беспилотных и дистанционно управляемых советских телетанков. Оснащенные пулеметами, огнеметами и дымовыми шашками, они были грозным оружием на поле боя.
Телетанк СССР – 1930-40 годы
3. Первый промышленный робот: Первый промышленный робот появился на конвейере General Motors в 1961 году. Это был первый робот-манипулятор, который помог ускорить производственные линии на производственных предприятиях. во всем мире.
«Unimate» Джорджа Девола — 1961 год
4. Первый робот-дрон: Военные исследования в 20-м веке привели к нескольким технологическим инновациям, включая GPS, которые привели к разработке первого полностью автономного боевого дрона в 1973. Этот беспилотник имел систему передачи данных, которая могла передавать своим операторам живое видео с высоким разрешением целевой области.
Этот беспилотник имел систему передачи данных, которая могла передавать своим операторам живое видео с высоким разрешением целевой области.
Tadiran Electronic Industries, Tadiran Mastiff III — 1973 год
5. Первый медицинский робот: Arthrobot был небольшим, крепящимся к кости роботом для проведения восстановительных операций на суставах. Точное бурение и программируемое местоположение и траектория.
6. Первый роботизированный транспорт: Tesla воплощает в жизнь наши мечты об автономных транспортных средствах, но реальный прогресс в этой области начался в 1986 с проектом Мюнхенского университета. В 1994 году ее беспилотный автомобиль VITA преодолел 1000 километров (620 миль) по шоссе с интенсивным движением в Париже, разогнавшись до скорости 128 километров (80 миль) в час.
7. Первый продвинутый гуманоид: ASIMO разрабатывается уже более двух десятилетий. Теперь он может бегать, прыгать, подниматься по лестнице, готовить напитки и т. д., используя бесколлекторные серводвигатели, обеспечивающие очень высокую точность движения. ASIMO в значительной степени полагается на алгоритм прогнозирования. Этот упреждающий контроль захватывающий, ограниченный только вычислительными возможностями. Будет ли он когда-нибудь думать о себе? Посмотрим.
д., используя бесколлекторные серводвигатели, обеспечивающие очень высокую точность движения. ASIMO в значительной степени полагается на алгоритм прогнозирования. Этот упреждающий контроль захватывающий, ограниченный только вычислительными возможностями. Будет ли он когда-нибудь думать о себе? Посмотрим.
Honda «Asimo» — 1986 год
8. Первый хирургический робот: Несмотря на то, что Athrobot стал важной вехой в медицинской робототехнике, только в 1997 году в Лейпциге было проведено первое роботизированное шунтирование сердца. Хирургическая система Da Vinci стала первым хирургическим роботом, получившим одобрение Управления по санитарному надзору за качеством пищевых продуктов и медикаментов США.
Интуитивная хирургическая система «Хирургическая система Да Винчи» — 1997 год
9. Первый коллаборативный робот: В 2003 году трое основателей, Эсбен Остергаард, Каспер Стой и Кристиан Кассов, встретились в Университете Южной Дании.