Содержание
Этот робот собирает кубик Рубика за секунду
Истории
25 января 2016
Истории
25 января 2016
Екатерина Бочкарева
Редактор «Истории» RB.RU.
Екатерина Бочкарева
Программные разработчики Джей Флэтланд и Пол Роуз создали машину, которая собирает кубик Рубика фантастически быстро. Их робот справляется с задачей всего за одну секунду.
Екатерина Бочкарева
Сейчас напарники подают заявку на мировой рекорд. Вряд ли он кого-то удивит, ведь последний машинный рекорд составлял 3,253 секунды (человеческий рекорд побил Лукас Эттер, собрав кубик всего за 4,904 секунды). Но всё же, если их заявку подтвердят, то они побьют прежние показатели.
Но всё же, если их заявку подтвердят, то они побьют прежние показатели.
Видео говорит само за себя:
В этом видео робот решает небезызвестную головоломку за 1,196 секунды, за 1,152 секунды, за 1,047 и в самом конце за 1,019 секунды.
Оказывается, что робот может похвастаться не только быстротой, но и постоянством. По крайней мере, в вышеуказанном ролике он четыре раза подряд решает головоломку за 1-1,2 секунды.
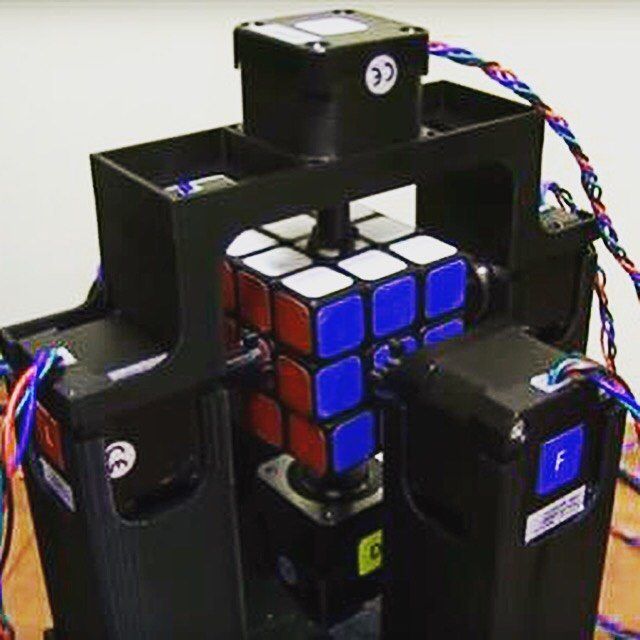
Робот сделан из шаговых двигателей, распечатанной на 3D-принтере конструкции и четырёх USB-камер, подключенных к ПК. Сначала он сканирует кубик, чтобы определить его конфигурацию, затем информация поступает в алгоритм решения кубика Рубика Kociemba, и робот предпринимает соответствующие действия.
Правда, решённый кубик Рубика слегка изменяется: машине приходится проделывать в середине каждой из шести сторон отверстие, чтобы его собрать.
Робот работает только тогда, когда включены все четыре камеры. Поэтому во время подготовки к решению головоломки камеру закрывают кусочком бумаги, кубик вручную крутят, а затем дают роботу новое задание.
Головоломку кубик Рубика, который изначально назывался Магическим кубиком, придумал в 1974 году венгерский скульптор и профессор архитектуры Эрнё Рубик. Прошло четыре десятилетия, а он по-прежнему забавляет миллионы людей во всем мире.
Источник.
Материалы по теме:
14 гифок удивительных технологий
4 фантастических тренда с CES 2016
Робот-собутыльник: отныне вам не придется пить в одиночку
8 роботов, которые уже работают среди людей
Самые громкие изобретения 2015 года в области 3D-печати
Эта роборука решает за вас, кого лайкнуть в Тиндере
Видео по теме:
 youtube.com/embed/bEiQwmEe45s?rel=0″>
youtube.com/embed/bEiQwmEe45s?rel=0″> - Фан
- Роботы
- Видео
Нашли опечатку? Выделите текст и нажмите Ctrl + Enter
Материалы по теме
1
Видео в 8K, новый Wi-Fi и нейросети: главные тренды с выставки IBC-2023 в Амстердаме
2
5 неочевидных замен Youtube для бизнеса
3
Альтернативные инвестиции: что это и как они работают
4
Автомобильный бизнес: как продавать эффективно?
5
На каких tech-креаторов подписаться в российском TikTok?
ВОЗМОЖНОСТИ
11 ноября 2022
AI Journey Contest
13 ноября 2022
Конкурс для начинающих предпринимателей FranchCamp
13 ноября 2022
Sovcombank Team Challenge 2022
Все ВОЗМОЖНОСТИ
Новости
Клиенты «Альфа-банка» пожаловались на сбои в работе десктопной и мобильной версий банка
Новости
Олег Тиньков принял решение отказаться от российского гражданства
Новости
ФАС проверит маркетплейсы и ритейлеров после жалоб о завышенных ценах на армейское снаряжение
Колонки
Мошенники в Telegram: топ-5 способов обмана
Списки и рейтинги
VPN-приложения для доступа к российским сервисам за границей
Робот который собирает кубик Рубика 3х3 на основе контроллера Arduino
Кубик Рубика 3х3 был хитом, когда он вышел в 1974 году. Но он и по сей день имеет массу почитателей и фанатов. По началу кубик Рубика трудно собрать, но многие принимают вызов и становятся спидкуберами, а некоторые продолжаю изобретать роботов для сборки.
Но он и по сей день имеет массу почитателей и фанатов. По началу кубик Рубика трудно собрать, но многие принимают вызов и становятся спидкуберами, а некоторые продолжаю изобретать роботов для сборки.
Робот собирающий кубик Рубика 3х3х3
Очередной механический комплекс для сборки кубика Рубика 3х3 “Arduino Rubik” — это робот, который использует электронику и математику для выполнения своей задачи.
Фотография робота собирающего кубик Рубика 3 на 3 «ARS — Arduino Rubik Solver».
Роботизированная система состоит из компьютерного программного обеспечения и аппаратной части, совместно работающей над сборкой кубика 3 на 3. Изображения с веб-камеры обрабатываются на компьютере, который определяет текущее состояние кубика Рубика и необходимые шаги для его решения.
Из чего изготовлен робот
Основная часть комплекса изготовлена из стальных стержней, акрила порезанного лазером и деталей напечатанных на 3D принтере, а также из Arduino* и шести шаговых двигателей.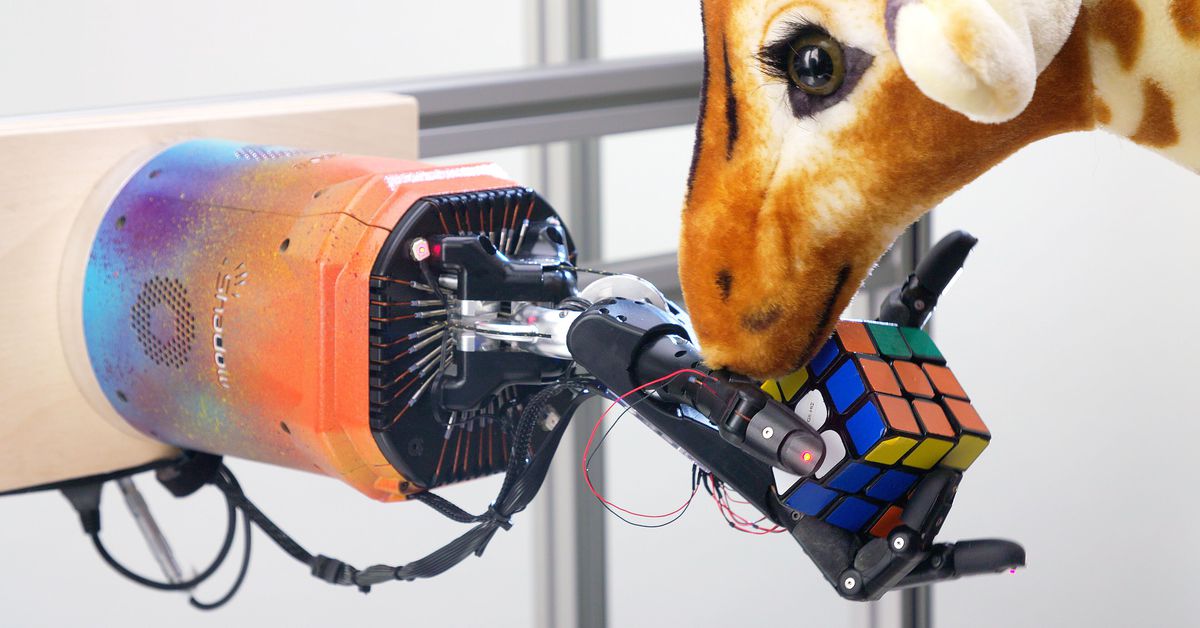 Arduino* получает инструкции от вычислительного компьютера через последовательный порт USB. Далее эти сигналы используются для того, чтобы дать команду шаговым двигателям правильно управлять кубиком.
Arduino* получает инструкции от вычислительного компьютера через последовательный порт USB. Далее эти сигналы используются для того, чтобы дать команду шаговым двигателям правильно управлять кубиком.
Фотография кубика Рубика 3х3х3 в лапах робота «ARS».
Как вы видите на видео это не демон скорости, но хитрое приспособление способно решить кубик Рубика без проблем. Манипулирование кубом надежное и плавное, а сборка плавная и аккуратная благодаря тщательно разработанным компонентам. Конечно это не шедевр, вещь с настоящее время есть кубики Рубика, которые могут собирать себя сами.
Контроллер для робота
Arduino контроллер предназначена для создания и программирования микропроцессорных устройств самого разного назначения.
Arduino Uno программируется и управляется при помощи стандартных средств от производителя, в том числе языка программирования среды разработки Arduino.
На фотографии показан контроллер Arduino Ethernet Rev3.
Видео по сборке кубика Рубика 3х3х3 роботом
Название видео: ARS — робот собирающий кубик Рубика
Английское название: ARS — Arduino Rubik Solver — emotional video
Описание видео: Видео с очередным роботом, который умеет собирать кубик Рубика. Он не супер быстрый, но учитывая то из чего он создан, это и не удивительно. Плавная и аккуратная сборка кубика Рубика 3х3 продемонстрирована на данном видео.
Ссылка на видео: https://www.youtube.com/embed/xboPoVXxuZMВидео: https://www.youtube.com/embed/xboPoVXxuZM
Видео добавлено: 2019-05-27
Продолжительность: 03 минут 43 сек. — в формате ISO PT03M43S
Современный робот с датчиком цвета… | Стоковое видео
Сэкономьте до 20% на первом заказе •
Apply HELLO20
Похожие категории
движение,
технология,
куб,
синий,
робот,
красный,
цвет,
презентация,
кубик рубика,
вместе,
демонстрация,
шоу,
современный,
скорпион,
запустить
Сбор кубика Рубика рукой робота
Мы обучили пару нейронных сетей собирать кубик Рубика рукой робота, похожей на человека. Нейронные сети полностью обучаются в моделировании с использованием того же кода обучения с подкреплением, что и OpenAI Five, в сочетании с новой техникой, называемой автоматической рандомизацией доменов (ADR). Система может справляться с ситуациями, которых она никогда не видела во время обучения, например, когда ее толкает плюшевый жираф. Это показывает, что обучение с подкреплением — это не просто инструмент для виртуальных задач, но может решать проблемы физического мира, требующие беспрецедентной ловкости.
Нейронные сети полностью обучаются в моделировании с использованием того же кода обучения с подкреплением, что и OpenAI Five, в сочетании с новой техникой, называемой автоматической рандомизацией доменов (ADR). Система может справляться с ситуациями, которых она никогда не видела во время обучения, например, когда ее толкает плюшевый жираф. Это показывает, что обучение с подкреплением — это не просто инструмент для виртуальных задач, но может решать проблемы физического мира, требующие беспрецедентной ловкости.
Читать бумагу
Смотреть все видео
Человеческие руки позволяют решать самые разные задачи. За последние 60 лет робототехники сложные задачи, которые люди выполняют своей фиксированной парой рук, требовали разработки специального робота для каждой задачи. В качестве альтернативы люди потратили много десятилетий, пытаясь использовать универсальное роботизированное оборудование, но без особого успеха из-за их высокой степени свободы. В частности, аппаратное обеспечение, которое мы здесь используем, не ново — рука-робот, которую мы используем, существует уже последние 15 лет, — но программный подход нов.
С мая 2017 года мы пытаемся обучить роботизированную руку, похожую на человека, собирать кубик Рубика. Мы поставили эту цель, потому что считаем, что успешное обучение такой роботизированной руки выполнению сложных манипуляционных задач закладывает основу для роботов общего назначения. Мы собрали кубик Рубика в симуляции в июле 2017 года. Но по состоянию на июль 2018 года мы могли манипулировать только блоком робота. Итак, мы достигли нашей первоначальной цели.
Полная сборка кубика Рубика. Это видео воспроизводится в реальном времени и никак не редактировалось.
Сборка кубика Рубика одной рукой — сложная задача даже для людей, и детям требуется несколько лет, чтобы развить ловкость, необходимую для ее овладения. Однако наш робот до сих пор не отточил свою технику, так как он собирает кубик Рубика в 60% случаев (и только в 20% случаев при максимально сложной сборке).
Наш подход
Мы обучаем нейронные сети собирать кубик Рубика в моделировании, используя обучение с подкреплением и алгоритм Коциембы для выбора шагов решения. [1] Рандомизация домена позволяет сетям, обученным исключительно моделированию, переходить к реальному роботу.
Рандомизация предметной области предоставляет нейронной сети множество различных вариантов одной и той же задачи, в данном случае решение кубика Рубика.
Самая большая проблема, с которой мы столкнулись, заключалась в том, чтобы создать среду в симуляции, достаточно разнообразную, чтобы отразить физику реального мира. Такие факторы, как трение, эластичность и динамика, невероятно трудно измерить и смоделировать для таких сложных объектов, как кубики Рубика или роботизированные руки, и мы обнаружили, что одной рандомизации предметной области недостаточно.
Чтобы преодолеть это, мы разработали новый метод под названием Автоматическая рандомизация доменов (ADR), который бесконечно создает все более сложные среды в моделировании.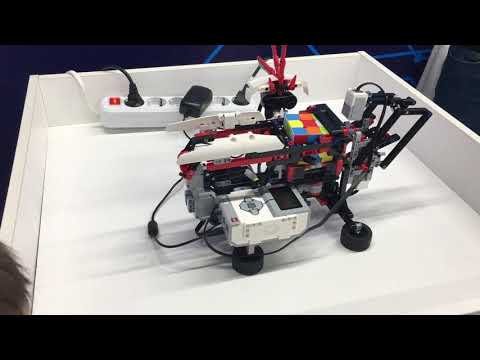 [2] Это освобождает нас от точной модели реального мира и позволяет перенести нейронные сети, полученные в ходе моделирования, в реальный мир.
[2] Это освобождает нас от точной модели реального мира и позволяет перенести нейронные сети, полученные в ходе моделирования, в реальный мир.
ADR начинается с единой нерандомизированной среды, в которой нейронная сеть учится собирать кубик Рубика. Когда нейронная сеть лучше справляется с задачей и достигает порога производительности, степень рандомизации домена автоматически увеличивается. Это усложняет задачу, поскольку теперь нейронная сеть должна научиться обобщать более рандомизированные среды. Сеть продолжает обучение до тех пор, пока снова не превысит порог производительности, после чего вступает в действие дополнительная рандомизация, и процесс повторяется.
ADR применяется к размеру кубика Рубика
Одним из рандомизируемых параметров является размер кубика Рубика (см. выше). ADR начинается с кубика Рубика фиксированного размера и постепенно увеличивает диапазон рандомизации по мере обучения. Мы применяем ту же технику ко всем другим параметрам, таким как масса куба, трение пальцев робота и материалы визуальной поверхности руки.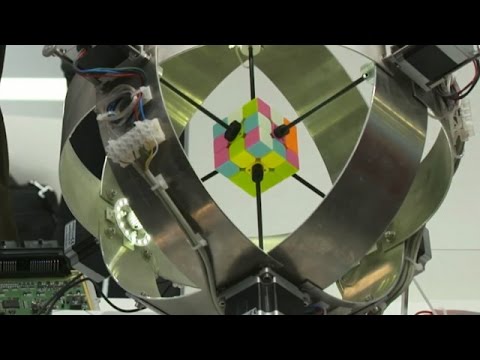 Таким образом, нейронная сеть должна научиться собирать кубик Рубика во всех этих все более сложных условиях.
Таким образом, нейронная сеть должна научиться собирать кубик Рубика во всех этих все более сложных условиях.
Автоматическая и ручная рандомизация доменов
Рандомизация доменов потребовала от нас ручного указания диапазонов рандомизации, что сложно, поскольку слишком большая рандомизация затрудняет обучение, а слишком малая рандомизация препятствует переносу на настоящего робота. ADR решает эту проблему, автоматически расширяя диапазоны рандомизации с течением времени без вмешательства человека. ADR устраняет необходимость в знании предметной области и упрощает применение наших методов к новым задачам. В отличие от ручной рандомизации доменов, ADR также делает задачу всегда сложной, а обучение никогда не сходится.
Мы сравнили ADR с ручной рандомизацией домена в задаче переворачивания блоков, где у нас уже был хороший базовый уровень. В начале ADR работает хуже по количеству успехов на реальном роботе. Но по мере того, как ADR увеличивает энтропию, которая является мерой сложности среды, производительность передачи в конечном итоге удваивается по сравнению с базовым уровнем — без вмешательства человека.
Анализ
Тестирование на надежность
Используя ADR, мы можем обучать нейронные сети в моделировании, которое может собирать кубик Рубика на реальной руке робота. Это связано с тем, что ADR подвергает сеть бесконечному разнообразию рандомизированных симуляций. Именно это воздействие сложности во время обучения подготавливает сеть к переходу от моделирования к реальному миру, поскольку она должна научиться быстро идентифицировать и приспосабливаться к любому физическому миру, с которым она сталкивается.
Невозмутимый (для справки)
Резиновая перчатка
Связанные пальцы
Бланкетная окклюзия и возмущение
Возмущение плюшевого жирафа
Pen perturbation
Возмущения, которые мы применяем к реальной руке робота, пока он собирает кубик Рубика. Все видео воспроизводятся в режиме реального времени.
Чтобы проверить возможности нашего метода, мы экспериментируем с различными возмущениями, пока рука собирает кубик Рубика.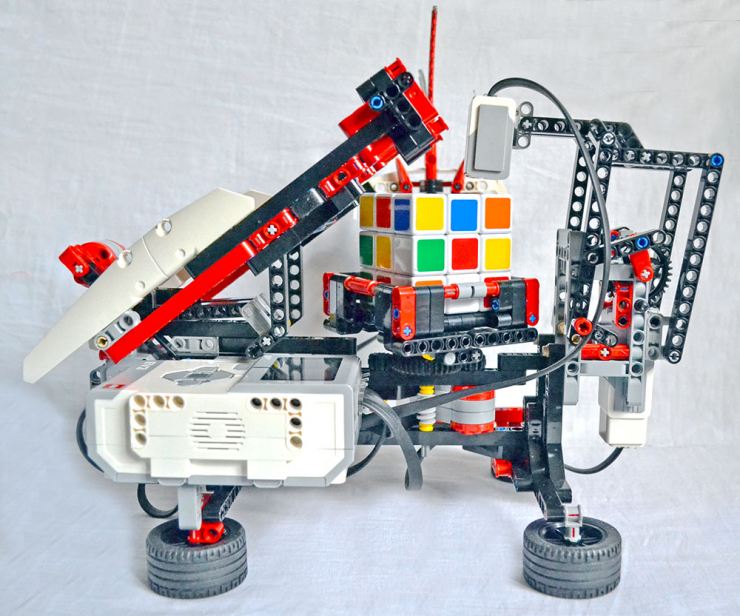 Это не только проверяет надежность нашей управляющей сети, но также проверяет нашу сеть зрения, которую мы здесь используем для оценки положения и ориентации куба.
Это не только проверяет надежность нашей управляющей сети, но также проверяет нашу сеть зрения, которую мы здесь используем для оценки положения и ориентации куба.
Мы обнаружили, что наша система, обученная с помощью ADR, на удивление устойчива к возмущениям, хотя мы никогда не тренировались с ними: робот может успешно выполнять большинство сальто и поворотов лица при всех протестированных возмущениях, хотя и не с максимальной производительностью.
Возникающее метаобучение
Мы считаем, что метаобучение, или обучение обучению, является важной предпосылкой для создания систем общего назначения, поскольку оно позволяет им быстро адаптироваться к меняющимся условиям среды. Гипотеза ADR заключается в том, что сети с расширенной памятью в сочетании с достаточно рандомизированной средой приводят к эмерджентное метаобучение , когда сеть реализует алгоритм обучения, который позволяет себе быстро адаптировать свое поведение к среде, в которой она развернута. [3]
[3]
флип (поворот куба таким образом, чтобы другой цвет был обращен вверх) для нашей нейронной сети при различных возмущениях, таких как сброс памяти сети, сброс динамики или разрыв соединения. Мы проводим эти эксперименты в моделировании, что позволяет нам усреднить результаты более 10 000 испытаний в контролируемых условиях.
Время успеха при очистке памяти сети
Время достижения успеха при изменении трения, массы или гравитации
Время до успеха, когда робот поврежден из-за поломки случайного соединения
В начале, по мере того как нейронная сеть успешно выполняет большее количество бросков, каждое последующее время до успеха уменьшается, потому что сеть учится адаптироваться. Когда применяются возмущения (вертикальные серые линии на графике выше), мы видим всплеск времени до успеха. Это связано с тем, что стратегия, которую использует сеть, не работает в изменившейся среде. Затем сеть повторно узнает о новой среде, и мы снова видим, что время до успеха уменьшается до предыдущего базового уровня.
Мы также измерили вероятность отказа и провели те же эксперименты с поворотами лица (поворот верхней грани на 90 градусов по часовой стрелке или против часовой стрелки) и обнаружили ту же схему адаптации. [4]
Понимание наших нейронных сетей
Визуализация наших сетей позволяет нам понять, что они хранят в памяти. Это становится все более важным по мере роста сложности сетей.
0:00
Память нашей нейронной сети визуализирована выше. Мы используем строительный блок из набора инструментов интерпретируемости, а именно неотрицательную матричную факторизацию, чтобы сжать этот многомерный вектор в 6 групп и присвоить каждой уникальный цвет. Затем мы отображаем цвет доминирующей в данный момент группы для каждого временного шага.
Мы обнаружили, что каждая группа памяти имеет связанное с ней семантически значимое поведение. Например, мы можем сказать, глядя только на доминирующую группу памяти сети, собирается ли она вращать куб или вращать вершину по часовой стрелке до того, как это произойдет .
Задачи
Собрать кубик Рубика рукой робота по-прежнему непросто. В настоящее время наш метод позволяет собрать кубик Рубика в 20% случаев при использовании максимально сложной игры, требующей 26 поворотов лица. Для более простых скремблов, для отмены которых требуется 15 вращений, вероятность успеха составляет 60%. При падении кубика Рубика или достижении тайм-аута попытка считается неудачной. Однако наша сеть способна собрать кубик Рубика из любых начальных условий. Таким образом, если кубик выпал, его можно вернуть в руку и продолжить решение.
Как правило, мы обнаруживаем, что наша нейронная сеть гораздо чаще дает сбой во время первых нескольких поворотов лица и переворотов. Это происходит потому, что нейронной сети необходимо сбалансировать сборку кубика Рубика с адаптацией к физическому миру во время этих ранних вращений и переворотов.
За кулисами: прототипы кубика Рубика
Чтобы оценить наш прогресс и сделать проблему решаемой, мы построили и разработали специальные версии кубиков в качестве трамплина на пути к окончательному решению обычного кубика Рубика.