Содержание
Робот летучая мышь детский мир. Создан робот-летучая мышь, который максимально точно подражает своему живому прототипу. Какие характеристики имеет летающий робот
Умение летучих мышей летать в практически кромешной тьме, выполняя сложнейшие маневры, удивляло и озадачивало ученых сотни лет. Лишь относительно недавно специалисты выяснили, благодаря чему летучая мышь может ориентироваться в пространстве без помощи органов зрения. Тем не менее, восхищают специалистов не только навигационные способности этих животных, но и их мастерство полета.
Летает мышь тихо, быстро, умеет практически мгновенно сменять направление движения. Если бы нечто подобное удалось создать человеку, науке и технике это дало бы многое. Инженеры и ученые долгое время изучают механику полета этих животных, стараясь воссоздать механизм полета мыши. Кое-кому это удается.
На днях ученые из Caltech представили своего робота Bat Bot (B2), оснащенного мягкими составными крыльями с перепонками между остовом. Партнерами Caltech в проекте выступила команда специалистов из Иллинойского университета в Урбане-Шампейне (UIUC, University of Illinois at Urbana-Champaign). «Конструкция этого робота поможет нам создавать более эффективные и безопасные дроны, также он помог нам помочь выяснить, как летают летучие мыши», — заявил Сун Джо Чунг (Soon-Jo Chung), один из участников проекта.
Партнерами Caltech в проекте выступила команда специалистов из Иллинойского университета в Урбане-Шампейне (UIUC, University of Illinois at Urbana-Champaign). «Конструкция этого робота поможет нам создавать более эффективные и безопасные дроны, также он помог нам помочь выяснить, как летают летучие мыши», — заявил Сун Джо Чунг (Soon-Jo Chung), один из участников проекта.
Чунг, присоединившийся к команде Caltech, разработал робота-летучую мышь вместе с его экс-научным руководителем Алиреза Рамезани (Alireza Ramezani) и Сетом Хатчинсоном (Seth Hutchinson), профессором из Иллинойского университета в Урбане-Шампейне.
Вес робота составляет всего 93 грамма. Внешне он напоминает летучую мышь, по образу и подобию которой и был спроектирован. Размах крыльев — всего 30 сантиметров. Система в процессе полета может изменять форму крыльев за счет складывания или разворачивания «пальцев», изменения формы и положения запястий, ног и плеч. Специалисты считают, что летучая мышь — одно из наиболее (если не самое) сложно организованных животных, способных летать. Крылья летучей мыши могут менять очертания, причем механизм полета включает задействование нескольких типов суставов, способных фиксировать кости и мускулы или, наоборот, увеличивать количество свобод составляющих крыло костей.
Крылья летучей мыши могут менять очертания, причем механизм полета включает задействование нескольких типов суставов, способных фиксировать кости и мускулы или, наоборот, увеличивать количество свобод составляющих крыло костей.
Принцип полета рукокрылых значительно отличается от принципа полета птиц Главная особенность заключается в гибкости и податливости крыла рукокрылых. Сильный изгиб крыла во время его хода вниз даёт гораздо большую подъёмную силу и сокращает затраты энергии, если сравнивать рукокрылых с птицами. При полете, во время движения крыла вниз у его передней кромки образуется завихрение воздуха, которое, по словам ученых, обеспечивает до 40% подъемной силы крыла. Поток воздуха начинается у передней кромки крыла, затем обходит его и снова возвращается во время обратного движения крыла вверх. Все это стало возможным за счет гибкости крыла, поскольку изгиб его позволяет держать завихрение вблизи поверхности крыла.
Для того, чтобы робот мог летать, разработчики создали сложную аппаратно-программную систему. Данные об окружающей среде, собираемые дроном в процессе полета, обрабатываются в режиме реального времени. Контролирующее ПО получает эти данные и координирует работу дрона. Все это работает в автономном режиме, без участия оператора
Данные об окружающей среде, собираемые дроном в процессе полета, обрабатываются в режиме реального времени. Контролирующее ПО получает эти данные и координирует работу дрона. Все это работает в автономном режиме, без участия оператора
Скелетно-мышечная система крыльев летучей мыши может совершать более 40 движений в различных направлениях. «Результат нашей работы — один из наиболее совершенных на данный момент дизайн крыльев робота с морфологией летучей мыши, причем этот робот может лететь в автономном режиме», — заявил Рамезани. Конечно, этому роботу еще довольно далеко до реальной летучей мыши, которая прямо в воздухе может настичь насекомое, облететь вокруг него, схватить и съесть. Такая маневренность — дело будущего, хотя и довольно близкого.
И действительно, крылья робота могут менять форму подобно тому, как это делают владельцы «прототипов». Сделать крыло подобного типа довольно сложно, для этого необходимо отлично разбираться в анатомических особенностях строения скелетно-мышечного аппарата летучих мышей. В качестве альтернативного коже материала инженеры создали пленку с толщиной всего 56 микрон, основой которой является силикон. Этот материал может растягиваться и сжиматься, почти так же хорошо, как и кожа, обтягивающая крылья летучих мышей.
В качестве альтернативного коже материала инженеры создали пленку с толщиной всего 56 микрон, основой которой является силикон. Этот материал может растягиваться и сжиматься, почти так же хорошо, как и кожа, обтягивающая крылья летучих мышей.
По словам разработчиков, летающие роботы-летучие мыши могут быть гораздо более энергоэффективными, чем обычные летательные аппараты. Роботы такого типа можно будет использовать в качестве альтернативы дронам. Причем, в отличие от большинства дронов, искусственные летучие мыши смогут быстрее менять направление полета. Плюс ко всему, они не будут такими опасными для человека (в плане возможности нанесения травм), как те же коптеры.
Разработкой биовдохновленных устройств (роботизированные муравьи, бабочки, птицы) сейчас занимаются несколько крупных компаний, в их число входит и немецкая фирма Festo, основная сфера деятельности которой – промышленная автоматизация.
Последним достижением немецких инженеров в этом направлении стал управляемый робот BionicFlyingFox. В отличие от других моделей, он повторяет строение тела лисицы-крылана – самого крупного подвида летучих мышей. По словам разработчиков, аппарат относится к разряду «сверхлегких летающих устройств с интеллектуальной кинематикой», что наделяет его ранее недостижимыми возможностями.
В отличие от других моделей, он повторяет строение тела лисицы-крылана – самого крупного подвида летучих мышей. По словам разработчиков, аппарат относится к разряду «сверхлегких летающих устройств с интеллектуальной кинематикой», что наделяет его ранее недостижимыми возможностями.
Какие характеристики имеет летающий робот?
Представители компании приоткрыли завесу тайны, опубликовав основные параметры новинки:
- размах крыльев – 228 см;
- длина – 87 см;
- вес – 580 грамм.
Чтобы летучая мышь получился настолько легким, мембрана крыла сделана из тонкой плетеной ткани, которая с обеих сторон покрыта двумя слоями воздухонепроницаемой пленки.
Особенности конструкции робота-летучей мыши
Помимо материала мембраны, стоит обратить внимание на само крыло: оно состоит из двух взаимосвязанных плоскостей. Каждая плоскость имеет собственные двигатели и контур управления. Движущей силой является главный электромотор постоянного тока. Обеспечение энергией главного мотора и вспомогательных двигателей реализовано при помощи встроенного источника питания, что наделяет агрегат полной автономностью.
Обеспечение энергией главного мотора и вспомогательных двигателей реализовано при помощи встроенного источника питания, что наделяет агрегат полной автономностью.
Управление реализовано при помощи наземной управляющей станции, которая через встроенные камеры способна следить за действиями агрегата в воздухе. Для того чтобы упростить процесс эксплуатации, разработчики внедрили систему искусственного интеллекта и самообучения. Такая функция позволяет улучшать технику выполнения воздушных маневров. В перспективе эта техника будет доведена до совершенства, и роботизированные животные по своим возможностям уже ничем не будут уступать живым прототипам.
Недавно мы рассказывали о таком чуде техники как дрон приспособленный для очистки от наледи винтов ветряков, вырабатывающих электричество. Махина с 36 пропеллерами способная поднимать до 200 кг груза и выполнять сложную работу с легкостью акробата на большой высоте.
Вот как это происходит:
Но у этого летательного аппарата есть один серьезный изъян, отключи электричество, и он упадет камнем вниз. Что делать, для того, чтобы этого не происходило? На этот вопрос отвечают ученные, программисты и инженеры, соорудившие искусственный , в точности повторяющий очертания и моторику настоящей летучей мыши.
Что делать, для того, чтобы этого не происходило? На этот вопрос отвечают ученные, программисты и инженеры, соорудившие искусственный , в точности повторяющий очертания и моторику настоящей летучей мыши.
Кто как не природа знает, как лучше всего приспосабливаться к окружающей среде? Миллионы лет эволюции не прошли даром. Взять к примеру ту же летучую мышь. Это рукокрылое создание гораздо раньше компании Тесла стала использовать радары для определения препятствий, она великолепно видит в темноте, в сотни раз лучше, чем самые навороченные современные автомобили, это было доказано недавним трагическим случаем произошедшим с автомобилем Volvo оборудованным автопилотом от Uber. Машина сбила человека, а летучая мышь нет.
Эти интересные создания также могут летать в замкнутых пространствах, быстро маневрировать и спать вверх тормашками.
И почему бы людям не попробовать скопировать то, что уже было сделано природой? Все ведь уже готово.
С технической точки зрения для современной инженерии в производстве бионического летательного аппарата нет ничего особенно сложного. Официально названный робот «Bionic Flying Fox» был построен вокруг легко, практически невесомой рамы, рамки обтянуты уникальной мембраной для крыльев с 40 тыс. точек крепления, которые делают искусственную «кожу» легкой и одновременно прочной. В пластиковое тельце вставлены аккумуляторы, шестеренчатый привод и электронные «мозги», которое имеет аналог машинного обучения и способно отдавать команды для полета в полуавтономном режиме.
Официально названный робот «Bionic Flying Fox» был построен вокруг легко, практически невесомой рамы, рамки обтянуты уникальной мембраной для крыльев с 40 тыс. точек крепления, которые делают искусственную «кожу» легкой и одновременно прочной. В пластиковое тельце вставлены аккумуляторы, шестеренчатый привод и электронные «мозги», которое имеет аналог машинного обучения и способно отдавать команды для полета в полуавтономном режиме.
Маловероятно, что конкретно этот робот когда-либо увидит свет в плане коммерческого использования, но это на данный момент. С помощью всего лишь нескольких простых материалов можно построить сложный летательный аппарат, который успешно имитирует грациозные движения живого существа.
Животный мир полон идей, которые во всю и успешно используют специалисты из области робототехники. Яркими примерами тому являются роботы SALTO , Robirds , MuddyBot, WildCat , Octobot и множество других необычных робототехнических устройств. И недавно этот ряд пополнился еще одним членом, роботом-летучей мышью Bat Bot, созданным специалистами из Калифорнийского технологического института и университета Иллинойса. Мягкие крылья этого робота являются более безопасной альтернативой, как для самого робота, так и для окружающей среды по сравнению с жесткими лопастями квадрокоптеров и других летательных аппаратов. И, во-вторых, робот Bat Bot обладает всеми превосходными возможностями в полете, как и его живой «прототип».
Мягкие крылья этого робота являются более безопасной альтернативой, как для самого робота, так и для окружающей среды по сравнению с жесткими лопастями квадрокоптеров и других летательных аппаратов. И, во-вторых, робот Bat Bot обладает всеми превосходными возможностями в полете, как и его живой «прототип».
По быстро мелькающим на фоне темного неба силуэтам невозможно разглядеть, что летучие мыши используют достаточно сложную скелетно-мышечную систему, которая позволяет им вытворять все элементы их «воздушной акробатики». Благодаря наличию высокоподвижных суставов в плечевом и локтевом суставах, мышь может динамически менять форму своих крыльев. Крыло летучей мыши способно принимать одну из 40 известных форм, каждая из которых обладает своими аэродинамическими характеристиками, благодаря чему это животное способно резко поворачивать в воздухе, совершать крутые броски вверх или вниз.
Робот Bat Bot, вес которого составляет 93 грамма при размахе крыльев 0.3 метра, полностью копирует даже самые мельчайшие особенности полета летучих мышей. Управляют полетом робота сложные алгоритмы, работающие в крошечном бортовом компьютере робота, который при помощи целого набора датчиков позволяет роботу летать полностью самостоятельно.
Управляют полетом робота сложные алгоритмы, работающие в крошечном бортовом компьютере робота, который при помощи целого набора датчиков позволяет роботу летать полностью самостоятельно.
Создавая робота Bat Bot, исследователи столкнулись с проблемой недостаточной прочности крыла. Механизм крыла должен быть легким и, одновременно, прочным, гибким и подвижным для того, чтобы позволить очень быстро изменять форму крыла во время выполнения пируэтов в воздухе. Но исследователям удалось добиться желаемого результата, что, в свою очередь, даже позволило увеличить эффективность полета робота по сравнению с живой летучей мышью. Во время полета тончайшая мембрана крыла формирует своего рода карман, в который попадает «порция» воздуха, а затем интенсивным движением этот воздух выталкивается крылом в нужном направлении, обеспечивая более высокую подъемную силу. В качестве самого подходящего материала для мембраны крыльев после серии экспериментов была выбрана тончайшая пленка из эластичной силиконовой резины, толщина которой составляет всего 54 микрона.
Робот Bat Bot, обладающий высочайшей маневренностью, способен проникать в такие места, куда не смогут проникнуть другие малые летательные аппараты, имеющие жесткую конструкцию и жесткие лопасти их пропеллеров. Кроме этого, использование экономичного метода воздушного кармана позволит роботу Bat Bot оставаться гораздо дольше других летательных аппаратов, имеющих аккумуляторную батарею сопоставимой емкости. Все вышесказанное делает робота Bat Bot идеальным вариантом для его использования в ситуациях, когда острые грани лопастей других аппаратов могут ранить людей, попавших в ловушку при стихийных бедствиях, к примеру, или повредить какое-нибудь хрупкое и ценное оборудование.
Группа робототехники и кибернетики из Политехнического университета Мадрида (Испания) представила новый микро-БПЛА. Дрон использует инновационную систему искусственных мышц, состоящих из материалов, способных сокращаться и сжиматься так, как это делают мышцы летучих мышей.
Пока искусственная мышка летает только по прямой, а колебания её крыльев не превышают 4 мм. (Здесь и ниже фото Политехнического университета в Мадриде.)
(Здесь и ниже фото Политехнического университета в Мадриде.)
Речь идёт о беспилотнике BaTboT, «Летучем мышероботе». Сообщается, что миниатюрный аппарат, форма крыльев которого может быть изменена непосредственно в полёте, способен весьма эффективно маневрировать на небольших скоростях, что позволит ему летать в замкнутом пространстве или среди многочисленных препятствий.
Крылья летучих мышей (единственных млекопитающих, способных к полёту) состоят из более чем двух дюжин независимых сочленений и одной тонкой, гибкой мембраны, растянутой на костной системе крыла. Поразительная манёвренность животных — результат сочетания взмахов их крыльев и одновременных сокращений и растяжений этих же крыльев в полёте. Крыло со столь изменяемой геометрией доводилось до совершенства эволюцией в течение миллионов лет, и попытка воспроизвести его за короткое время стала настоящим вызовом для учёных. Они приняли его, и в результате получился BaTboT.
Размах крыльев этого микро-БПЛА составляет 50 см, что объясняется желанием «соответствовать природному прототипу». А прототипом стала летучая лисица (Pteropus poliocephalus), одна из самых крупных летучих мышей в мире. Вес микро-БПЛА минимизировался для достижения максимального времени полёта на встроенной литий-полимерной батарее.
А прототипом стала летучая лисица (Pteropus poliocephalus), одна из самых крупных летучих мышей в мире. Вес микро-БПЛА минимизировался для достижения максимального времени полёта на встроенной литий-полимерной батарее.
Для воспроизведения работы мускульной системы животного исследователям пришлось обратиться к относительно сложной задаче — вместо обычных моторов нужно было сымитировать действие мышц живых существ. «Мышцы» BaTboT состоят из крошечных волокон, «сотканных» из сплавов с памятью формы; они работают по образцу бицепсов и трицепсов, сокращающих сочленения крыла летучей мыши. Весит каждый из «мускулов» BaTboT менее 1 г, а общая масса микро-БПЛА, которого разработчики предпочитают называть летающим роботом, составляет 125 г (включая аккумуляторы, бортовую электронику и движители). «Скелет» тянет на 34 г. Общая тяга крыла летуна — 12,2 г/см, время взмаха — 300 мс, колебание крыла при взмахе — примерно 4 мм. Ток, приводящий в движение «мышцы», имеет силу в 285 мА и напряжение в 3–5 В.
Каркас микро-БПЛА. На него натягивается силиконовая ткань обшивки толщиной в 0,1 мм.
Данные по биологическим деталям полёта летучих мышей были получены испанскими исследователями от коллег из Университета Брауна в Провиденсе (США). В ближайшем будущем в дополнение к простому полёту по прямой авторы намерены перейти к полётам с интенсивным маневрированием, что позволит доработать системы контроля, навигации и сенсоров. Целью такой модификации называется достижение способности к автономным действиям, в ходе которых микродрон сможет собирать информацию. В качестве возможных сфер применения учёные упоминают биологические исследования по изучению летучих мышей в их естественной среде обитания, а также контроль за вредителями.
Вряд ли стоит сомневаться, что способность к сбору информации и высокоманёвренному полёту в закрытых помещениях не заинтересует военных. Напомним, ещё во время Второй мировой ВВС США трудились над проектом бомбардировки японских городов летучими мышами, сбрасываемыми в самораспаковывающихся контейнерах, причём каждая мышь имела ранец с 17-граммовой зажигательной бомбой. Тестовые полёты были настолько успешными, что в результате едва не сгорела сама испытательная база…
Тестовые полёты были настолько успешными, что в результате едва не сгорела сама испытательная база…
Итоговая публикация по первой стадии проекта должна состояться в текущем году.
Принимая подсказку от летучих мышей, команда из Тель-Авива создает робота, который перемещается с помощью эхо-сигналов — Лехаим
Новости
Принимая подсказку от летучих мышей, команда из Тель-Авива создает робота, который перемещается с помощью эхо-сигналов
13 сентября 2018,
19:00
Технологии
Поделиться
Твитнуть
Поделиться
Исследователи из Тель-Авивского университета разработали так называемого Robatа, полностью автономного наземного робота, который, как летучая мышь, излучает звуки и анализирует возвращающиеся эхо-сигналы, чтобы распознавать, отображать и перемещаться, избегая препятствий на открытом пространстве.
Исследователи сказали, что разработка может иметь «большой потенциал» для использования звука для будущих роботизированных приложений. Статья об изобретении была опубликована 6 сентября в PLOS Computational Biology. Аспирант TAU Итамар Элиаким вместе с командой исследователей в области зоологии, нейробиологии и инженерии разработал робота, который, подобно летучей мыши, издает звуки и анализирует возвращающиеся эхо-сигналы для создания карты пространства. «Одной из самых сложных задач, с которыми сталкиваются многие роботы, является проблема создания карты неизвестной среды, впервые осуществляя навигацию по этой среде», пишут исследователи, некоторые из которых изучали био-сонар летучих мышей более 10 лет.
Летучие мыши решают проблему картографирования неизвестной окружающей среды, воспринимая их окружение акустически – излучая звуковые сигналы и анализируя возвращающиеся эхо-сигналы, пишут исследователи. Вдохновленные этой способностью, исследователи создали Robat – робот, который полагается исключительно на звуковую навигационную систему, чтобы ориентироваться в новых средах и отображать их. Для этого исследователи использовали биологический подход, создавая уши – используя два ультразвуковых приемника – и рот, используя ультразвуковой динамик или излучатель, который продуцирует звуки на типичной частоте летучей мыши. Они заявили, что это позволили Robat перемещаться через внешнюю среду и отображать ее в режиме реального времени.
Для этого исследователи использовали биологический подход, создавая уши – используя два ультразвуковых приемника – и рот, используя ультразвуковой динамик или излучатель, который продуцирует звуки на типичной частоте летучей мыши. Они заявили, что это позволили Robat перемещаться через внешнюю среду и отображать ее в режиме реального времени.
«Наш Robat является первым полностью автономным, похожим на летучую мышь биологически правдоподобным роботом», который движется через новую среду, «при этом он отображает ее исключительно на основе эхо-информации». Эта информация помогает очертить границы объектов и открытое пространство между ними, сказал Элиаким. Исследователи писали, что робот «добился высокой точности отображения», доказывая «большой потенциал» использования активных широкополосных звуковых излучений для отображения окружающей среды и использования звука в будущих роботизированных приложениях, пишут исследователи.
Исследователи также создали алгоритм машинного обучения, чтобы обучать робота лучше классифицировать новые объекты. Исследователи писали, что Robat был намного медленнее, чем настоящая летучая мышь, останавливаясь примерно на 30 секунд каждые полметра, чтобы получить эхо. Но эта медлительность объяснялась главным образом механическими ограничениями робота. Любой робот, которому необходимо ориентироваться в окружающей среде – и это большинство роботов, – может извлечь выгоду из алгоритма навигации на основе эха, разработанного в исследовании, заявил професср Йосси Йовель из отдела зоологии TAU, и член исследовательской группы в электронном письме The Times of Israel. Сюда входят сервисные роботы, такие как роботы-пылесосы, которые должны перемещаться по жилым помещениям, сельскохозяйственные роботы, работающим в теплицах, и спасательные роботы, перемещающиеся под руинами дома, разрушенного в результате землетрясения.
Исследователи писали, что Robat был намного медленнее, чем настоящая летучая мышь, останавливаясь примерно на 30 секунд каждые полметра, чтобы получить эхо. Но эта медлительность объяснялась главным образом механическими ограничениями робота. Любой робот, которому необходимо ориентироваться в окружающей среде – и это большинство роботов, – может извлечь выгоду из алгоритма навигации на основе эха, разработанного в исследовании, заявил професср Йосси Йовель из отдела зоологии TAU, и член исследовательской группы в электронном письме The Times of Israel. Сюда входят сервисные роботы, такие как роботы-пылесосы, которые должны перемещаться по жилым помещениям, сельскохозяйственные роботы, работающим в теплицах, и спасательные роботы, перемещающиеся под руинами дома, разрушенного в результате землетрясения.
Цель команды состояла в том, чтобы «использовать природу для решения человеческих проблем», – сказал Йовель, эксперт по летучим мышам. «Подражание животным не может быть оптимальным способом решения этих проблем, например, робот не ограничивается двумя ушами, но получение вдохновения от животных может привести к новым решениям». «Животные регулярно решают проблемы, которые инженеры находят очень сложными, например, сопоставление новой среды при перемещении по ней», – добавил он. Таким образом, проект имеет две цели: с одной стороны, он пытается имитировать животных, чтобы лучше понять проблемы, с которыми они сталкиваются в действительности. С другой стороны, он ищет решения технических проблем, которые в настоящее время очень трудно решить.
«Животные регулярно решают проблемы, которые инженеры находят очень сложными, например, сопоставление новой среды при перемещении по ней», – добавил он. Таким образом, проект имеет две цели: с одной стороны, он пытается имитировать животных, чтобы лучше понять проблемы, с которыми они сталкиваются в действительности. С другой стороны, он ищет решения технических проблем, которые в настоящее время очень трудно решить.
По словам Йовела, в мире было несколько попыток построить роботов, похожих на летучую мышь. Но Robat «продвинут по сравнению с этими попытками в нескольких аспектах». Robat движется автономно-предыдущие роботы управлялись пользователем – и ему удается очертить границы объектов, которые он обнаруживает. «При этом он генерирует карту открытых маршрутов, по которым он может двигаться», – сказал он. «Robat также первым использует алгоритм машинного обучения, питаемый эхом из окружающей среды, чтобы обучить его классифицировать новые объекты на основе этих примеров», сказал он.
В дальнейшем исследователи хотели бы установить свой сенсор на летающем роботе. «Это не обязательно сделает его более точным, но это сделает его быстрее», – сказал Йовель.
timesofisrael.com
Твитнуть
Поделиться
Поделиться
Выбор редакции
Пятый пункт: газовый прогиб, ползучая революция, дом Шагала, Трамп и Байден, дегенеративное искусство
Кого считать евреем, и можно ли в Израиле жениться в зуме? Сколько стоит дом Шагала? И что говорят про евреев Трамп и Байден? Глава департамента общественных связей ФЕОР и главный редактор журнала «Лехаим» Борух Горин представляет обзор событий недели.
7 октября
об этом надо поговорить
Борух Горин
«Людей, сделавших эту работу, давно нет»: фотографии Бориса Рамзеса из экспедиции в Синьцзян
Борис Рамзес, несмотря на опасность ареста, летом 1937 года едет в Москву, чтобы получить средства на продолжение работ в Китае. Однако, поскольку он находится под подозрением, ни один из высокопоставленных работников Наркомтяжпрома не рискнул с ним встретиться. Экспедиция оказалась разгромлена, вскоре свернула свою работу, хотя были найдены нефть и золото. Сам Борис Рамзес чудом избежал ареста, несмотря на то что ряд ближайших коллег написали на него донос в НКВД.
Однако, поскольку он находится под подозрением, ни один из высокопоставленных работников Наркомтяжпрома не рискнул с ним встретиться. Экспедиция оказалась разгромлена, вскоре свернула свою работу, хотя были найдены нефть и золото. Сам Борис Рамзес чудом избежал ареста, несмотря на то что ряд ближайших коллег написали на него донос в НКВД.
6 октября
Архив
Андрей Лихацкий
Чосер и радиоуглеродный анализ
«О юный Хью из Линкольна, умученный проклятыми евреями»? Не было такого у Кашкина и Румера! Конечно, не было: весь The Prioresses Tale («Рассказ аббатисы») в СССР не печатался именно из‑за своего средневекового антисемитизма. Ведь в нем описывается настоящий кровавый навет — один из многих в Англии XII–XIII веков. Так от Чосера я узнал об этой ужасной истории. А несколько недель назад достоянием общественности стала сенсационная находка ученых…
Ведь в нем описывается настоящий кровавый навет — один из многих в Англии XII–XIII веков. Так от Чосера я узнал об этой ужасной истории. А несколько недель назад достоянием общественности стала сенсационная находка ученых…
3 октября
Колонка редактора
Борух Горин
Предатели
Что их держало? Точно не любовь к Крыму, Украине, русским или татарам. Жизнь Подольского вращалась вокруг иудаизма и Израиля.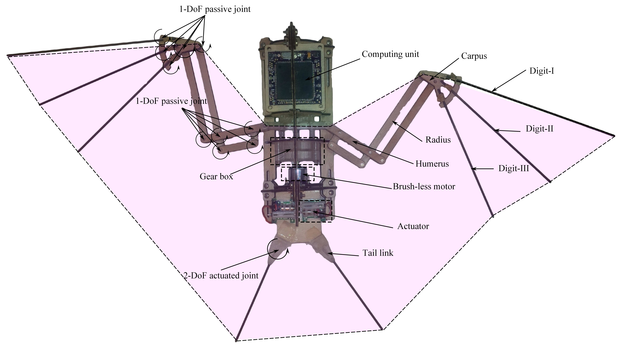 Он приглядывал за синагогой, отпирал двери утром по субботам. Носил армейское кепи защитного цвета в знак солидарности с еврейскими поселенцами. Пристально следил за развитием событий в Израиле, читал в интернете газеты на иврите… Что мешало ему вернуться туда, куда безусловно стремилась его душа?
Он приглядывал за синагогой, отпирал двери утром по субботам. Носил армейское кепи защитного цвета в знак солидарности с еврейскими поселенцами. Пристально следил за развитием событий в Израиле, читал в интернете газеты на иврите… Что мешало ему вернуться туда, куда безусловно стремилась его душа?
2 октября
Неразрезанные страницы
Дэвид Безмозгис. Перевод с английского Олеси Качановой
Невеселый еврей Эдельман
Жизнь Марека Эдельмана продолжалась не четыре года под немцами в гетто, а потом оставшиеся 65 лет «нормально». Она продолжалась четыре года в гетто, из них месяцы смертельных вылазок, боев, прятания, ухода на «арийскую сторону», возвращения за стену, за проволоку. Это так радикально переменило состав его крови, что и оставшиеся 65 лет жизни вроде бы нормальной он прожил полноценно, так же как те четыре, так же как те месяцы на краю смерти.
Она продолжалась четыре года в гетто, из них месяцы смертельных вылазок, боев, прятания, ухода на «арийскую сторону», возвращения за стену, за проволоку. Это так радикально переменило состав его крови, что и оставшиеся 65 лет жизни вроде бы нормальной он прожил полноценно, так же как те четыре, так же как те месяцы на краю смерти.
2 октября
Прошлое наизнанку
Анатолий Найман
Робот Летучая Мышь Логотип: создать онлайн
Логин
Забыл пароль
Регистрация
Произошла ошибка
Пожалуйста обновите страницу и попробуйте снова. Если проблема возникает снова, пожалуйста свяжитесь с нами.
Если проблема возникает снова, пожалуйста свяжитесь с нами.
Восстановить пароль
Введите ваш email и мы вышлем инструкции по сбросу пароля
Вернуться к логину
Киберспорт
Компьютерные игры
Животные
Черный
Клан
Твич
Крутые игры
Студия игрового дизайна
Разработчик игр
Видео игра
Игровой спонсор
Игровой портал
Игровая команда
Летающий
Фиолетовый
Робототехника
Робот
Летучая мышь
Создать лого по шаблону
Робот Летучая Мышь Логотип подходит, если вы работает в таких сферах как Киберспорт, Компьютерные игры, Животные. Используйте этот дизайн для создания логотипа своей компании.
Используйте этот дизайн для создания логотипа своей компании.
Похожие шаблоны
Логотипы по отраслям
- Hand Made
- IT, Разработка
- PR
- Squarespace
- Wix
- YouTube
- Абстракция
- Авиакомпания
- Авто
- Автомойка
- Автосервис
- Агрокомпании
- Аксессуары
- Арт, искусство
- Архитектура
- Аудит
- Банк, финансовые организации
- Бар
- Барбершоп
- Баскетбол
- Безопасность
- Бейсбол
- Бизнес
- Благотворительные организации
- Блог
- Бутик
- Бухгалтерский учет
- Ветеринарная клиника
- Визажист
- Вязание
- Гостиница, отель
- Графический дизайн
- Группа
- Двери
- Детский
- Диджитал
- Дизайн интерьера
- Дом
- Дом
- Еда
- Животные
- Здоровье
- Зоомагазин
- Инжиниринг, проектирование
- Инстаграм
- Интернет магазин
- Йога
- Кафе
- Кейтеринг
- Киберспорт
- Кино
- Клининг
- Клуб
- Компьютерные игры
- Компьютеры
- Кондиционеры
- Консалтинг
- Косметика
- Коуч
- Кофе, кофейня
- Креатив
- Ландшафтный дизайн
- Личный
- Логистика
- Маникюр
- Маркетинг
- Маска
- Массаж
- Мебель
- Медицина
- Мода
- Музыка
- Недвижимость
- Некоммерческая организация
- Нефть
- Новорожденный
- Обучение и образование
- Одежда
- Охота и рыбалка
- Парикмахерская
- Пекарня
- Перевозки
- Пиво
- Подкаст
- Политика
- Праздник
- Приложение
- Природа
- Производство
- Путешествия
- Развлечение
- Рекламное агентство
- Ремонт
- Ремонт квартир
- Ресницы
- Ресторан
- Салон красоты
- Сантехник
- Свадьба
- Семья
- Служба доставки
- Солнечная энергия
- Спа
- Спорт
- Стартап
- Стоматология
- Страхование
- Строительство
- Такси
- Тату
- Телевидение
- Технологии
- Торговля
- Транспорт
- Трендовый логотип
- Уход за газоном
- Учитель
- Финансы
- Фитнес
- Фотография
- Фриланс
- Футбол
- Химчистка, прачечная
- Храм
- Цветы
- Четкий
- Швея
- Школа
- Шопифай
- Ювелирное дело
- Юриспруденция
Вот летучая мышь-бот, первый летающий робот-летучая мышь
Группа ученых только что построила первого робота, который выглядит и летает как летучая мышь. Они назвали его, конечно же, Bat Bot.
Они назвали его, конечно же, Bat Bot.
Бэт-бот — не что иное, как чудо инженерной мысли. Он весит всего 3,3 унции — примерно как два мяча для гольфа. С силиконовой мембраной, натянутой на каркас из углеродного волокна, головой, набитой бортовым компьютером и датчиками, и пятью микромоторами, натянутыми вдоль его позвоночника, Бэт-Бот способен к автономному, машущему полету. Разработанный тремя робототехниками во главе с Сун-Джо Чангом из Калифорнийского технологического института, он был представлен сегодня в журнале 9.0005 Научная робототехника .
Посмотреть полный пост на Youtube
Что делает Bat Bot таким замечательным, так это то, насколько чертовски сложно было имитировать естественный полет летучей мыши. Если бы полеты были искусством, летучие мыши сделали бы пилотов с неподвижным крылом похожими на рисование пальцами. Это потому, что при каждом взмахе крыльев «летучие мыши используют более 40 активных и пассивных суставов [наряду] с гибкими мембранами своих крыльев», — говорит Чанг. Кроме того, летучие мыши пользуются целым набором других трудно имитируемых биологических трюков, таких как кости, которые адаптивно деформируются при каждом взмахе крыла.
Кроме того, летучие мыши пользуются целым набором других трудно имитируемых биологических трюков, таких как кости, которые адаптивно деформируются при каждом взмахе крыла.
«Возможно, летучие мыши обладают самым сложным силовым механизмом полета среди животных», — пишут робототехники в своей статье.
Бэт-бот выполняет четыре основных компонента движения крыла летучей мыши — сгибание плеча, локтя и запястья, а также взмах хвостом из стороны в сторону.
Ramezani, Chung, Hutchinson, Sci. Робот. 2, eaal2505 (2017)
Усовершенствованный робот, простая летучая мышь
Чтобы построить Бэт-бота, команде Чанга сначала пришлось отказаться от фантазии о том, что они могут просто механизировать взмахи крыльями летучей мыши, сустав за суставом. «Нецелесообразно или невозможно включать [все 40] этих соединений в конструкцию робота», — говорит Чанг. Даже с самыми передовыми робототехническими технологиями на сегодняшний день вы просто получите тяжелого, неуклюжего робота, который никогда не оторвется от земли.
Вместо этого трио сосредоточилось на биологических исследованиях полета летучих мышей, включая чрезвычайно полезное исследование суставов летучих мышей 2008 года, автором которого является биолог и ведущий канала Discovery Дэн Рискин. Изучая исследования, они стремились понять, без каких из этих 40 суставов можно обойтись, а какие абсолютно необходимы.
«Возможно, летучие мыши обладают самым сложным силовым механизмом полета среди животных.»
В конце концов, у летающего робота Чанга девять суставов. И хотя Бэт-Бот — это серьезно продвинутая машина, это все же довольно простая летучая мышь. Например, «пальцы» Bat Bot из углеродного волокна не имеют костяшек или суставов. И летучая мышь не крутит активно запястья, как это делает обычная летучая мышь.
Есть и другие упрощения. В то время как мембраны крыльев летучих мышей могут иметь разный уровень жесткости в разных местах, сверхтонкая силиконовая мембрана Bat Bot (которую команда Чанга изготовила самостоятельно) обладает одинаковой гибкостью.
Посмотреть полный пост на Youtube
Тем не менее, элегантный полет Бэт-бота почти неотличим от его биологического родственника. Он плавно и независимо сгибает и разгибает запястья, плечи, локти и ноги, скользя по воздуху. Если вы не биолог, то вам будет трудно заметить механические различия между взмахами Бэт-бота и настоящими.
Что еще круче, Бэт-бот не управляется дистанционно. Используя легкий набор датчиков и компьютеров, он может автономно выполнять колебательное планирование, развороты и резкие пикирования. Но Bat Bot не идеален — пока. Он еще не может подняться в воздух; он может взмахивать только в контролируемом скольжении. Эскалация полета, а также типичная перевернутая насест летучей мыши — это две возможности, над которыми команда Чанга работает прямо сейчас.
Почему летучие мыши?
Летные характеристики Rousettus aegyptiacus вдохновлены летучими мышами.
Ramezani, Chung, Hutchinson, Sci. Робот. 2, eaal2505 (2017)
Огромная сложность Bat Bot заставляет задуматься: зачем вообще возиться со сложным и непостоянным полетом летучих мышей, когда на рынке уже есть проворные летающие роботы, такие как дроны-квадрокоптеры?
Команда Чанга утверждает, что мягкость Бэт-бота и отсутствие быстро вращающихся пропеллеров делают его более безопасным для людей, чем другие летающие роботы. Чанг предполагает, что будущие воплощения Bat Bot смогут летать по новым строительным площадкам в середине строительства, садясь на балки, чтобы делать фотографии или выискивать ошибки или другие структурные недостатки. Если кто-то наткнется на строителя, ничего страшного.
После того, как я ударил в лицо мошеннический квадрокоптер, я могу подтвердить их утверждение о том, что столкновение пропеллера лбом с людьми очень болезненно и его следует избегать любой ценой.
Возможно, было бы проще построить более безопасный квадрокоптер. Но эй, мы здесь не для того, чтобы допрашивать этого отважного робота. Смысл существования Bat Bot еще более прост. Во-первых, Bat Bot великолепен. Во-вторых, мы полагаем, что Bat Bot — это очень эффективное топливо для кошмаров для тех, кто уже боится летучих мышей, и что в этом может не нравиться?
Но эй, мы здесь не для того, чтобы допрашивать этого отважного робота. Смысл существования Bat Bot еще более прост. Во-первых, Bat Bot великолепен. Во-вторых, мы полагаем, что Bat Bot — это очень эффективное топливо для кошмаров для тех, кто уже боится летучих мышей, и что в этом может не нравиться?
Уильям ХеркевитцРепортер по науке и технологиям
Уильям Херкевитц — журналист по науке и технологиям из Берлина, Германия. Он пишет о теоретической физике, искусственном интеллекте, астрономии, настольных играх, пивоварении и обо всем, что между ними.
Bat Bot: робот-дрон, вдохновленный летучими мышами
©Caltech
Робот-дрон, вдохновленный летучими мышами, который имитирует полеты летучих мышей
Животные часто являются источником вдохновения для создания и механизмов роботов. Команда из Иллинойского университета Урбана-Шампейн и Калифорнийского технологического института успешно имитировала структуру крыльев летучих мышей и создала полностью автономного летающего робота под названием Bat Bot (B2).
Летучие мыши демонстрируют замечательную ловкость в полете благодаря своей способности регулировать размах крыльев, изгиб крыльев и угол атаки с помощью независимо управляемых суставов. Весом всего 93 грамма, B2 имеет форму настоящей летучей мыши и имеет эластичные мембранные крылья на силиконовой основе, которые лучше всего соответствуют морфологическим свойствам полета летучей мыши. Робот способен изменять форму своего крыла, сгибая, вытягивая и скручивая плечи, запястья, бедра, локти и ноги.
У их исследований была двойная мотивация. Изучение полета летучих мышей дало ценную информацию о машущих воздушных роботах, и конструкция этих роботов, вдохновленных летучими мышами, имеет практическое применение для более безопасной среды человека/беспилотника. Многие предыдущие проекты были сосредоточены на полете насекомых. Структура крыльев большинства насекомых не так сложна, как у летучих мышей, из-за их единственной несочлененной структурной единицы. Механизм полета летучей мыши уникален среди других летающих животных. Их механизм полета включает в себя несколько различных типов суставов (например, шаровидный и вращающийся сустав), которые соединяют кости и мышцы друг с другом, создавая метаморфическую скелетно-мышечную систему, которая имеет более 40 степеней свободы (DOF). По словам исследователей, эти аспекты полета летучих мышей открывают уникальную перспективу для крылатой воздушной робототехники.
Их механизм полета включает в себя несколько различных типов суставов (например, шаровидный и вращающийся сустав), которые соединяют кости и мышцы друг с другом, создавая метаморфическую скелетно-мышечную систему, которая имеет более 40 степеней свободы (DOF). По словам исследователей, эти аспекты полета летучих мышей открывают уникальную перспективу для крылатой воздушной робототехники.
Воздушные роботы, вдохновленные летучими мышами, также имеют ряд преимуществ по сравнению с современными воздушными роботами (например, квадрокоптерами). Самым большим преимуществом этих роботов являются их мягкие крылья. Традиционные квадрокоптеры и другие винтокрылые машины считаются небезопасными по своей природе для человека из-за их материалов и устройств (например, острых лопастей несущего винта или винтов) и высокоамплитудного шума. С другой стороны, роботы с гибкими крыльями летучих мышей состоят в основном из гибких материалов и могут взмахивать крыльями с гораздо более низкой частотой (от 7 до 10 Гц против 100–300 Гц квадрокоптера).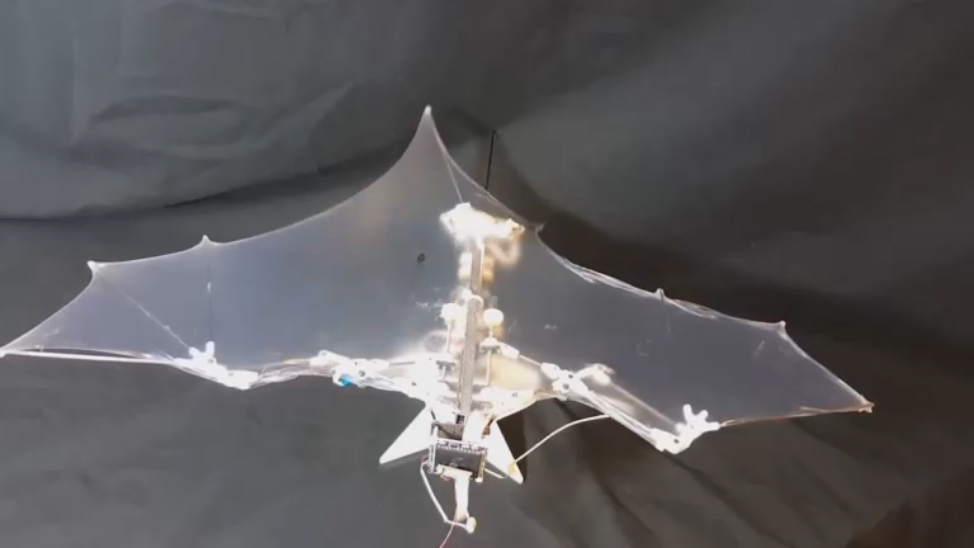 Считается, что эти роботы намного безопаснее в эксплуатации и полете, поскольку они перемещаются в различных средах, практически не причиняя никакого вреда.
Считается, что эти роботы намного безопаснее в эксплуатации и полете, поскольку они перемещаются в различных средах, практически не причиняя никакого вреда.
Основными степенями свободы в кинематике полета летучих мышей, которые были включены в дизайн B2, были взмахи крыльями, медиолатеральные движения передних конечностей, сгибание-разгибание пальцев, пронация-супинация запястья (мелкие кости, соединяющие руку с передней конечностью) и дорсовентральная движение ног.
Эти «биологически значимые» DOF позволили исследователям имитировать полет летучей мыши в гораздо более простом дизайне, но с той же функциональностью.
Рис. 1. Полетный механизм Bat Bot и его степени свободы / © Ramezani et al., 2017
Летательный механизм Бэт-бота состоит из 2 крыльев (левого и правого), каждое из которых включает механизм передней и задней конечностей. Левое и правое крылья соединены с механическим осциллятором. Используя механизм коленчатого вала, два крыла могут двигаться синхронно и дорсовентрально. Каждое крыло также может выполнять асинхронные и медиолатеральные движения. Задние конечности (ноги), воздействующие на заднюю кромку крыльев, совершают асинхронные и дорсовентральные движения. Передние конечности состоят из девяти звеньев или соединений: плечевая (p0-p1), плечевая опора (p1-p2), лучевая (p1-p3), лучевая опора (p4-p5), запястная (p3-p4), запястная опора (p1-p5) и три пальцевых ссылки (рис. 1; вверху справа).
Каждое крыло также может выполнять асинхронные и медиолатеральные движения. Задние конечности (ноги), воздействующие на заднюю кромку крыльев, совершают асинхронные и дорсовентральные движения. Передние конечности состоят из девяти звеньев или соединений: плечевая (p0-p1), плечевая опора (p1-p2), лучевая (p1-p3), лучевая опора (p4-p5), запястная (p3-p4), запястная опора (p1-p5) и три пальцевых ссылки (рис. 1; вверху справа).
Рисунок 2. Электронные компоненты Bat Bot (B2) / © Ramezani et al., 2017
Одной из уникальных характеристик B2 является то, что им можно управлять без дистанционного управления. Управление полетом B2 состоит из бортовых датчиков, высокопроизводительных микромоторов с обратной связью от энкодера и микропроцессора. В то время как обычные MAV с неподвижным крылом часто управляются тягой и обычными рулями, B2 имеет девять активных колебательных сочленений, которые требуют соответствующего распределения управляющих усилий по сочленениям.
B2 состоит из бортового компьютера и нескольких датчиков для автономной навигации. Эта электроника была изготовлена на заказ специально для этой автономной системы, и все они оснащены внутренним оборудованием, то есть на B2 нет внешней электроники. MCB, расположенный внутри головки B2, содержит микропроцессор и обрабатывает алгоритмы навигации и управления в режиме реального времени. Данные датчиков поступают через блок сбора данных, который также отвечает за управление микроприводами. Сенсорный блок, состоящий из специально разработанных печатных плат с малыми форм-факторами, взаимодействует с датчиками и MCB путем записи двух видов измерений. Инерциальный измерительный блок (IMU), расположенный в грудной клетке (где ось x направлена вперед, а ось y направлена вверх), считывает высоту робота по отношению к инерциальной раме. Пять датчиков Холла, расположенных на локтях, бедрах и маховых суставах, считывают относительные углы между конечностями по отношению к телу.
Рисунок 3. Схема потока данных Bat Bot / © Ramezani et al., 2017
Схема потока данных Bat Bot / © Ramezani et al., 2017
Схема потока данных B2 показана на рисунке 3. Микропроцессор (STM32F429Zi) в центре взаимодействует с несколькими SD-карта, IMU (VN-100), пять энкодеров на эффекте Холла (AS5048) и два двойных драйвера двигателей постоянного тока. Два 8-канальных микроприемника RC для беспроводной связи (DSM2) и устройство Bluetooth обеспечивают связь с хостом или панелью. Для тестирования контроллера на платформе использовалось моделирование аппаратного обеспечения в контуре (HIL). В HIL контроллер полета встроен в физический микропроцессор, а компьютер реального времени используется в качестве виртуального объекта (модели) и реагирует на состояние переменных виртуальной модели.
Эластичная сеть в коже крыльев летучей мыши была реализована с использованием ультратонкой (56 микрометров) кожи, покрывающей скелет крыльев. Обычные материалы для тканевого покрытия, такие как нейлоновая пленка, не подходили для тела B2 из-за ограничений движений передних конечностей и ног. В результате команда использовала изготовленную на заказ мембрану на основе силикона, которая соответствует эластичным свойствам настоящих мембран крыльев летучих мышей. Команда сосредоточила свое внимание на нескольких свойствах мембраны крыла, учитывая, что реконструировать все ее характеристики было невозможно. Они обнаружили, что ключевыми особенностями анатомических свойств биологической кожи летучих мышей являются: 1) вес на единицу площади (площадная плотность), 2) модуль упругости при растяжении и 3) растяжимость.
В результате команда использовала изготовленную на заказ мембрану на основе силикона, которая соответствует эластичным свойствам настоящих мембран крыльев летучих мышей. Команда сосредоточила свое внимание на нескольких свойствах мембраны крыла, учитывая, что реконструировать все ее характеристики было невозможно. Они обнаружили, что ключевыми особенностями анатомических свойств биологической кожи летучих мышей являются: 1) вес на единицу площади (площадная плотность), 2) модуль упругости при растяжении и 3) растяжимость.
В текущей конструкции основные соединения крыльев реализованы с помощью ряда механических ограничений и схемы управления с обратной связью для управления полетным движением летучей мыши с шестью степенями свободы. У летучих мышей сложная костно-мышечная система (т. е. несколько активных и пассивных суставов), из-за чего исследователям было очень сложно включить суставы в дизайн. Несомненно, B2 — это один из первых шагов к реализации сложной локомоции летучих мышей. Модель может способствовать дальнейшему изучению моделей движения крыльев, наблюдаемых при полете летучих мышей, и реконструкции маневров полета биологических летучих мышей.
Несомненно, B2 — это один из первых шагов к реализации сложной локомоции летучих мышей. Модель может способствовать дальнейшему изучению моделей движения крыльев, наблюдаемых при полете летучих мышей, и реконструкции маневров полета биологических летучих мышей.
Юлхейн-Херес Кох
Юлхейн окончила Калифорнийский университет в Беркли, инженер-биомеханик и исполнительный редактор DevicePlus US. Основные интересы Юлхейн лежат в области роевой робототехники, машинного обучения и нейронауки.
Посетите нас в социальных сетях
Робот-летучая мышь обеспечивает безопасность и маневренность благодаря дизайну, вдохновленному биотехнологиями
Как понял Верн, Гражданская война в США (во время которой
было выполнено 60 000 ампутаций) положило начало современной эре протезирования в Соединенных Штатах благодаря федеральному финансированию и волне патентов на дизайн, поданных протезистами-предпринимателями. Две мировые войны укрепили коммерческую индустрию протезирования как в Соединенных Штатах, так и в Западной Европе, а продолжающаяся война с терроризмом помогла ей превратиться в индустрию с оборотом в 6 миллиардов долларов США по всему миру. Однако эти недавние инвестиции не являются результатом непропорционально большого количества ампутаций в ходе военных конфликтов: около 1500 американских солдат и 300 британских солдат лишились конечностей в Ираке и Афганистане. Потеря конечностей среди населения в целом затмевает эти цифры. Только в Соединенных Штатах более 2 миллионов человек живут с потерей конечностей, при этом 185 000 человек ежегодно подвергаются ампутации. Гораздо меньшее число детей — от 1500 до 4500 детей в год — рождаются с разницей или отсутствием конечностей, включая меня.
Две мировые войны укрепили коммерческую индустрию протезирования как в Соединенных Штатах, так и в Западной Европе, а продолжающаяся война с терроризмом помогла ей превратиться в индустрию с оборотом в 6 миллиардов долларов США по всему миру. Однако эти недавние инвестиции не являются результатом непропорционально большого количества ампутаций в ходе военных конфликтов: около 1500 американских солдат и 300 британских солдат лишились конечностей в Ираке и Афганистане. Потеря конечностей среди населения в целом затмевает эти цифры. Только в Соединенных Штатах более 2 миллионов человек живут с потерей конечностей, при этом 185 000 человек ежегодно подвергаются ампутации. Гораздо меньшее число детей — от 1500 до 4500 детей в год — рождаются с разницей или отсутствием конечностей, включая меня.
Сегодня люди, разрабатывающие протезы, как правило, инженеры с добрыми намерениями, а не сами инвалиды. Мясистые обрубки мира служат хранилищем мечтаний этих дизайнеров о высокотехнологичном, сверхчеловеческом будущем. Я знаю это, потому что на протяжении всей своей жизни я был оснащен одними из самых
Я знаю это, потому что на протяжении всей своей жизни я был оснащен одними из самых
самые передовые протезы на рынке. После рождения без левого предплечья я был одним из первых младенцев в Соединенных Штатах, которым снабдили миоэлектрическим протезом руки — электронным устройством, управляемым мышцами носителя, напрягающимися от датчиков внутри гнезда протеза. С тех пор я носил множество протезов рук, каждый из которых стремился к идеальному воспроизведению человеческой руки — иногда за счет эстетики, иногда за счет функциональности, но всегда предназначенный для имитации и замены того, что отсутствовало.
За время моей жизни миоэлектрические руки превратились из когтеобразных конструкций в мультизахватные, программируемые, анатомически точные копии человеческой руки, большинство из которых стоит десятки тысяч долларов. Журналисты не могут налюбоваться этими изощренными, многоцелевыми «бионическими» руками с реалистичной силиконовой кожей и органическими движениями, негласно обещая, что инвалидность скоро исчезнет, а любая потерянная конечность или орган будет заменена равноценной копией. Инновации в области протезов рук рассматриваются как соревнование с высокими ставками, чтобы увидеть, что технологически возможно. Тайлер Хейс, генеральный директор стартапа по производству протезов
Инновации в области протезов рук рассматриваются как соревнование с высокими ставками, чтобы увидеть, что технологически возможно. Тайлер Хейс, генеральный директор стартапа по производству протезов
Atom Limbs изложила это в видео WeFunder, которое помогло собрать 7,2 миллиона долларов от инвесторов: «Каждый лунный полет в истории начинался с изрядной доли сумасшествия, от электричества до космических путешествий, и Atom Limbs ничем не отличается».
Мы вовлечены в гонку бионических рук. Но делаем ли мы реальный прогресс? Пришло время спросить, для кого на самом деле нужны протезы и чего они, как мы надеемся, на самом деле сделают. Каждая новая бионическая рука с несколькими захватами имеет тенденцию быть более сложной, но и более дорогой, чем предыдущая, и с меньшей вероятностью покрывается (даже частично) страховкой. И, как показывают недавние исследования, гораздо более простые и гораздо менее дорогие протезы могут одинаково хорошо выполнять многие задачи, а причудливые бионические руки, несмотря на все их электронные возможности, редко используются для хватания.
Активные руки, такие как этот, изготовленный протезной фирмой Arm Dynamics, дешевле и долговечнее, чем бионические протезы. Насадка от компании Texas Assistive Devices, производящей протезы, рассчитана на очень большой вес, что позволяет автору выполнять упражнения, которые были бы рискованными или невозможными с ее гораздо более дорогой бибионической рукой. Габриэла Хасбун; Макияж: Мария Нгуен для косметики MAC; Волосы: Джоан Лаки для Living Proof
Function or Form
В последние десятилетия подавляющее внимание исследований и разработок новых искусственных рук было сосредоточено на совершенствовании различных типов захватов. Многие из самых дорогих рук на рынке отличаются количеством и разнообразием выбираемых цепких захватов. Мой собственный медиа-любимец руки, bebionic от Ottobock, который я получил в 2018 году, имеет силовую рукоятку в форме кулака, щипковые рукоятки и один очень специфический режим с большим пальцем поверх указательного для вежливой передачи кредитной карты. Моя миоэлектрическая рука 21-го века казалась замечательной, пока я не попытался использовать ее для некоторых рутинных задач, где она оказалась
Моя миоэлектрическая рука 21-го века казалась замечательной, пока я не попытался использовать ее для некоторых рутинных задач, где она оказалась
громоздче и требует больше времени, чем если бы я просто оставил его на диване. Я не мог использовать его, чтобы закрыть дверь, например, задача, которую я могу сделать с моей культей. А без чрезвычайно дорогого дополнения в виде запястья с электроприводом я не мог пересыпать овсянку из кастрюли в миску. Выполнение задач крутым бионическим способом, даже если это имитировало две руки, было явно не лучше, чем выполнение вещей по-моему, иногда с помощью моих ног и ступней.
Когда я впервые заговорил с
Эд Спирс, лектор по робототехнике и машинному обучению в Имперском колледже Лондона, был в своем кабинете поздно ночью, но его все еще волновали роботизированные руки — нынешнее направление его исследований. Спайерс говорит, что антропоморфная роботизированная рука неизбежна, от реальности сегодняшнего протезирования до фантазии научной фантастики и аниме. «На одной из своих первых лекций здесь я показывал отрывки из фильмов и мультфильмов и то, как крутые кинематографисты делают руки роботов», — говорит Спирс. «В аниме Gundam , есть так много крупных планов гигантских рук роботов, хватающих такие вещи, как массивные пушки. Но почему это должна быть человеческая рука? Почему у робота просто нет пистолета вместо руки?»
«На одной из своих первых лекций здесь я показывал отрывки из фильмов и мультфильмов и то, как крутые кинематографисты делают руки роботов», — говорит Спирс. «В аниме Gundam , есть так много крупных планов гигантских рук роботов, хватающих такие вещи, как массивные пушки. Но почему это должна быть человеческая рука? Почему у робота просто нет пистолета вместо руки?»
Пришло время спросить, для кого на самом деле нужны протезы и чего они, как мы надеемся, на самом деле сделают.
Спирс считает, что разработчики протезов слишком увлечены формой, а не функцией. Но он поговорил с ними достаточно, чтобы понять, что они не разделяют его точку зрения: «У меня такое ощущение, что людям нравится идея о том, что люди великие, и что руки делают людей совершенно уникальными». Почти каждый университетский факультет робототехники, который посещает Спирс, занимается разработкой антропоморфных роботов. «Вот как выглядит будущее», — говорит он, и его голос звучит немного раздраженно. «Но часто есть лучшие способы».
«Но часто есть лучшие способы».
Подавляющее большинство людей, пользующихся протезами конечностей, — это люди с односторонней ампутацией — люди с ампутациями, затрагивающими только одну сторону тела, — и они практически всегда используют свою доминирующую «мясистую» руку для деликатных задач, таких как поднятие чашки. Как односторонние, так и двусторонние ампутированные конечности также получают помощь от своего туловища, ступней и других объектов в их окружении; редко задачи выполняются одним протезом. И все же, общие клинические оценки для определения успеха протеза основаны на использовании только протеза без помощи других частей тела. Такие оценки, похоже, предназначены для демонстрации возможностей протеза руки, а не для определения того, насколько он полезен в повседневной жизни пользователя. Инвалиды по-прежнему не являются арбитрами стандартов протезирования; мы все еще не в центре дизайна.
Крюк Хосмера [слева], первоначально разработанный в 1920 году, представляет собой оконечное устройство с питанием от тела, которое используется до сих пор. Насадка-молоток [справа] может быть более эффективной, чем насадка-захват, при забивании гвоздей в дерево. Слева: Джон Прието/The Denver Post/Getty Images; Справа: Hulton-Deutsch Collection/Corbis/Getty Images
Насадка-молоток [справа] может быть более эффективной, чем насадка-захват, при забивании гвоздей в дерево. Слева: Джон Прието/The Denver Post/Getty Images; Справа: Hulton-Deutsch Collection/Corbis/Getty Images
Протезы в реальном мире
Чтобы узнать, как пользователи протезов живут со своими устройствами,
Спирс руководил исследованием, в котором использовались камеры, надетые на головы участников, для записи ежедневных действий восьми человек с односторонней ампутацией или врожденными различиями конечностей. Исследование, опубликованное в прошлом году в IEEE Transactions on Medical Robotics and Bionics , включает несколько разновидностей миоэлектрических рук, а также систем с питанием от тела, которые используют движения плеча, груди и плеча, передаваемые по кабелю, для механического управления захватом на конце протез. Исследование проводилось, когда Спирс был научным сотрудником лаборатории GRAB Йельского университета, возглавляемой Аароном Долларом. Помимо Доллара, он тесно сотрудничал с аспиранткой Джиллиан Кокран, которая была соавтором исследования.
Помимо Доллара, он тесно сотрудничал с аспиранткой Джиллиан Кокран, которая была соавтором исследования.
Просматривая необработанные кадры из исследования, я чувствовал одновременно грусть и чувство товарищества с анонимными пользователями протезов. На роликах видны неуклюжесть, просчеты и случайные падения, знакомые даже очень опытным пользователям протезов рук. Часто протез просто помогает прижать объект к телу, которым можно управлять другой рукой. Также было очевидно, сколько времени люди тратили на подготовку своих миоэлектрических протезов для выполнения задачи — часто требовалось несколько дополнительных секунд, чтобы вручную или с помощью электроники повернуть запястья своих устройств, выровнять объект, чтобы правильно схватить его, и отработать захват. подход. Участник, который повесил бутылку с дезинфицирующим спреем на «крючок» руки, вытирая кухонный стол, похоже, был тем, кто все понял.
В ходе исследования протезы использовались в среднем только для 19 процентов всех зафиксированных манипуляций. В целом протезы использовались в основном для нехватательных действий, а другая, «неповрежденная» рука выполняла большую часть хватания. Исследование выявило большие различия в использовании между теми, у кого неэлектрические протезы с питанием от тела, и теми, у кого есть миоэлектрические протезы. Для пользователей протезов с приводом от тела, у которых ампутация была ниже локтя, почти 80 процентов использования протезов приходилось на движения без захвата — толкание, нажатие, вытягивание, подвешивание и стабилизация. Для миоэлектрических пользователей устройство использовалось для захвата только в 40 процентах случаев.
В целом протезы использовались в основном для нехватательных действий, а другая, «неповрежденная» рука выполняла большую часть хватания. Исследование выявило большие различия в использовании между теми, у кого неэлектрические протезы с питанием от тела, и теми, у кого есть миоэлектрические протезы. Для пользователей протезов с приводом от тела, у которых ампутация была ниже локтя, почти 80 процентов использования протезов приходилось на движения без захвата — толкание, нажатие, вытягивание, подвешивание и стабилизация. Для миоэлектрических пользователей устройство использовалось для захвата только в 40 процентах случаев.
Что еще более показательно, пользователи с неэлектрическими захватами или разъемными крюками тратили значительно меньше времени на выполнение задач, чем пользователи с более сложными протезами. Спайерс и его команда отметили плавность и скорость, с которой первые приступили к выполнению задач в своих домах. Они могли использовать свои искусственные руки почти мгновенно и даже получать прямую тактильную обратную связь через кабель, который управляет такими системами.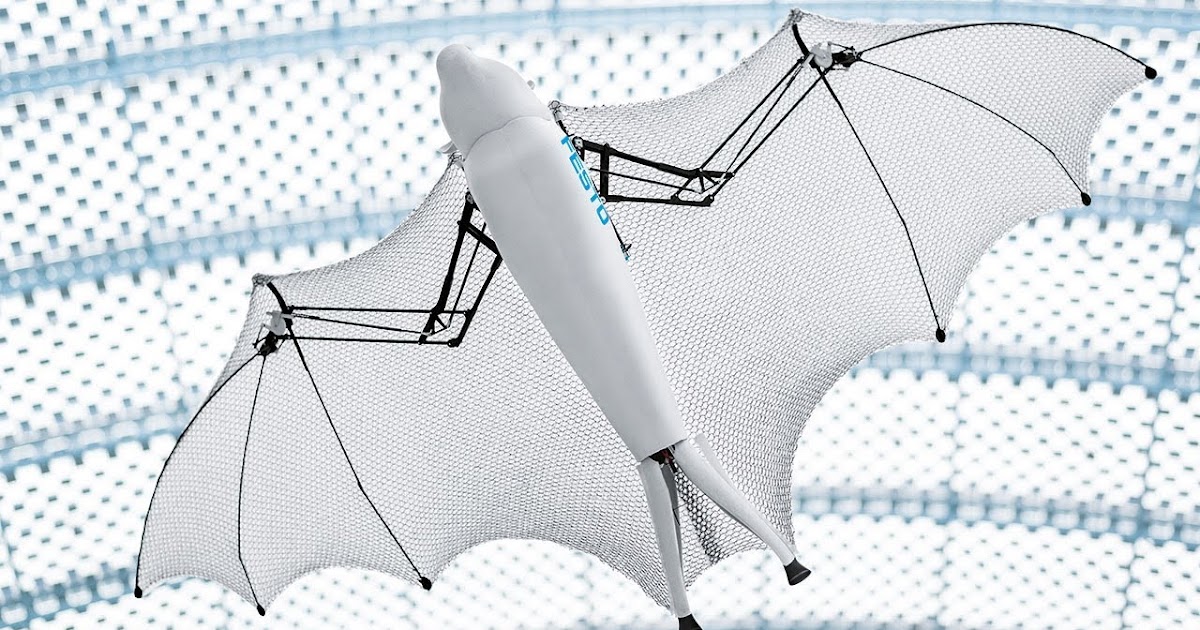 Исследование также выявило небольшую разницу в использовании между миоэлектрическими устройствами с одним захватом и более причудливыми миоэлектрическими многошарнирными руками с несколькими захватами, за исключением того, что пользователи, как правило, избегали подвешивания предметов на своих руках с несколькими захватами, по-видимому, из страха сломать их.
Исследование также выявило небольшую разницу в использовании между миоэлектрическими устройствами с одним захватом и более причудливыми миоэлектрическими многошарнирными руками с несколькими захватами, за исключением того, что пользователи, как правило, избегали подвешивания предметов на своих руках с несколькими захватами, по-видимому, из страха сломать их.
«У нас сложилось впечатление, что люди с миоэлектрическими руками с несколькими хватами довольно осторожно подходят к их использованию», — говорит Спирс. Это неудивительно, поскольку большинство миоэлектрических рук стоят более 20 000 долларов, редко получают одобрение страховки, требуют частой профессиональной поддержки для изменения схемы хвата и других настроек, а также требуют дорогостоящих и длительных процессов ремонта. По мере того, как протезные технологии становятся все более сложными и запатентованными, все большую озабоченность вызывает долгосрочная работоспособность. В идеале устройство должно легко ремонтироваться пользователем. И все же некоторые стартапы в области протезирования предлагают модель подписки, при которой пользователи продолжают платить за доступ к ремонту и поддержке.
И все же некоторые стартапы в области протезирования предлагают модель подписки, при которой пользователи продолжают платить за доступ к ремонту и поддержке.
Несмотря на выводы своего исследования, Спирс говорит, что подавляющее большинство исследований и разработок в области протезирования по-прежнему сосредоточено на совершенствовании способов захвата дорогих высокотехнологичных бионических рук. Он говорит, что даже помимо протезирования исследования манипулирования в исследованиях приматов и робототехники в основном касаются хватания: «Все, что не хватает, просто выбрасывается».
TRS производит широкий ассортимент протезов с приводом от тела для различных хобби и занятий спортом. Каждое приспособление предназначено для определенной задачи, и их можно легко заменить для различных видов деятельности. Fillauer TRS
Цепляясь за историю
Если мы решили, что то, что делает нас людьми, — это наши руки, а то, что делает руку уникальной, — это ее способность хватать, то единственный протез, который у нас есть, — это тот, который прикреплен к запястьям большинства людей. Тем не менее, погоня за максимальной пятизначной хваткой не обязательно является следующим логическим шагом. Фактически, история показывает, что люди не всегда были зациклены на идеальном воссоздании человеческой руки.
Тем не менее, погоня за максимальной пятизначной хваткой не обязательно является следующим логическим шагом. Фактически, история показывает, что люди не всегда были зациклены на идеальном воссоздании человеческой руки.
Как рассказывается в сборнике эссе 2001 г.
Письмо на руках: память и знания в Европе раннего Нового времени , представления о руке развивались на протяжении столетий. «Душа подобна руке; ибо рука есть орудие инструментов», — писал Аристотель в « De Anima ». Он полагал, что человечество было намеренно наделено подвижной и цепкой рукой, потому что только наш уникальный разумный мозг мог использовать ее — не как простую утварь, а как инструмент для apprehensio , или «схватывания» мира в прямом и переносном смысле.
Спустя более 1000 лет идеи Аристотеля нашли отклик у художников и мыслителей эпохи Возрождения. Для Леонардо да Винчи рука была посредником между мозгом и миром, и он приложил исключительные усилия в своих анализах и иллюстрациях человеческой руки, чтобы понять ее основные компоненты. Его тщательные исследования сухожилий и мышц предплечья и кисти привели его к выводу, что «хотя человеческая изобретательность делает различные изобретения… она никогда не найдет изобретений более красивых, более подходящих или более прямых, чем природа, потому что в ее изобретениях нет ничего недостающего и ничего лишнего».
Его тщательные исследования сухожилий и мышц предплечья и кисти привели его к выводу, что «хотя человеческая изобретательность делает различные изобретения… она никогда не найдет изобретений более красивых, более подходящих или более прямых, чем природа, потому что в ее изобретениях нет ничего недостающего и ничего лишнего».
Иллюстрации да Винчи вызвали волну интереса к анатомии человека. Тем не менее, при всем тщательном изображении человеческой руки европейскими мастерами, рука рассматривалась скорее как источник вдохновения, чем как объект, который простые смертные могли воспроизвести. На самом деле было широко признано, что хитросплетения человеческой руки свидетельствуют о божественном замысле. Никакая машина, заявил христианский философ Уильям Пейли, не является «более искусственной или более очевидной», чем сгибатели руки, что предполагает преднамеренный замысел Бога.
Выполнение задач крутым бионическим способом, даже если это имитировало две руки, было явно не лучше, чем выполнение вещей по-моему, иногда с помощью моих ног и ступней.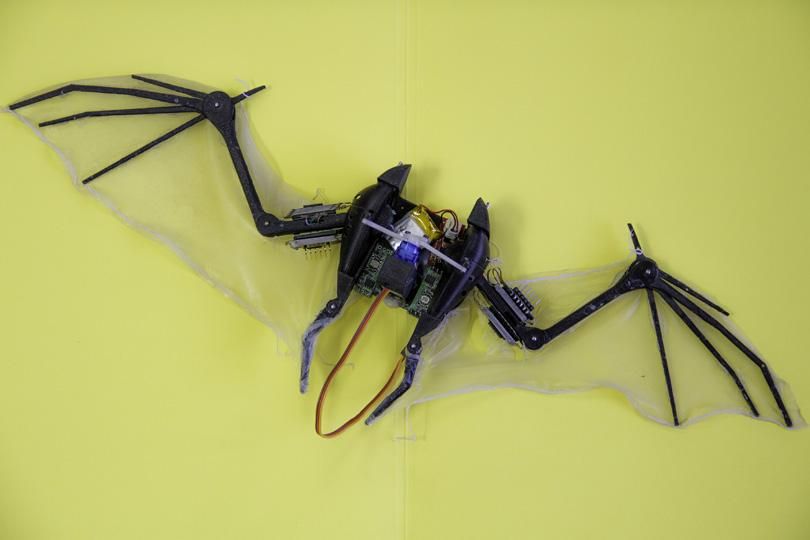
К середине 1700-х годов, когда на глобальном севере произошла промышленная революция, начал формироваться более механистический взгляд на мир, и грань между живыми существами и машинами начала стираться. В своей статье 2003 года «
Wetware восемнадцатого века, — пишет Джессика Рискин, профессор истории Стэнфордского университета, — период между 1730-ми и 1790s был симуляцией, в которой механики искренне пытались сократить разрыв между живыми и искусственными механизмами». В этот период произошли значительные изменения в конструкции протезов конечностей. В то время как механические протезы 16-го века были отягощены железом и пружинами, в протезе 1732 года с приводом от тела использовалась система шкивов для сгибания руки, сделанной из легкой меди. К концу 18 века металл заменили кожей, пергаментом и пробкой — более мягкими материалами, имитирующими живую материю.
Технооптимизм начала 20-го века привел к очередным изменениям в дизайне протезов.
Вольф Швейцер, патологоанатом Цюрихского института судебной медицины, человек с ампутированными конечностями. Он владеет широким спектром современных протезов рук и имеет необходимый опыт для их тестирования. Он отмечает, что анатомически правильные протезы рук вырезались и выковывались на протяжении большей части 2000 лет. И все же, по его словам, разрезной крючок 20-го века с приводом от тела «более современен», его конструкция больше стремится сломать форму человеческой руки.
Он владеет широким спектром современных протезов рук и имеет необходимый опыт для их тестирования. Он отмечает, что анатомически правильные протезы рук вырезались и выковывались на протяжении большей части 2000 лет. И все же, по его словам, разрезной крючок 20-го века с приводом от тела «более современен», его конструкция больше стремится сломать форму человеческой руки.
«Рука, приводимая в действие телом, — с точки зрения ее символизма — (по-прежнему) выражает человеко-машинный символизм индустриального общества 1920-х годов».
пишет Швейцер в своем блоге о протезах рук, «когда человек должен был функционировать как заводная шестерня на производственных линиях или в сельском хозяйстве». В оригинальном дизайне крючка Хосмера 1920-х годов петля внутри крючка была помещена только для завязывания обуви, а другая — только для удержания сигарет. Эти дизайны, как сказал мне Ad Spiers, были «невероятно функциональными, функциональность превыше формы. Все части служили определенной цели».
Швейцер считает, что по мере того, как в 20-м веке потребность в ручном труде уменьшалась, протезы, которые были высокофункциональными, но не натуралистичными, затмились новым высокотехнологичным видением будущего: «бионическими» руками. В 2006 году Агентство перспективных оборонных исследовательских проектов США запустило
Революционное протезирование, исследовательская инициатива по разработке следующего поколения протезов рук с «почти естественным» контролем. В рамках программы стоимостью 100 миллионов долларов были созданы два многошарнирных протеза руки (один для исследований, а другой стоимостью более 50 000 долларов). Что еще более важно, это повлияло на создание других подобных протезов, сделав бионическую руку — как ее представляли себе военные — святым Граалем в протезировании. Сегодня бионическая рука с несколькими захватами является гегемоном, символом целостности киборга.
И все же некоторые разработчики протезов придерживаются другого видения. TRS, базирующаяся в Боулдере, штат Колорадо, является одним из немногих производителей
протезы для конкретных видов деятельности, которые часто более долговечны и более доступны с финансовой точки зрения, чем роботизированные протезы. Эти пластмассовые и силиконовые насадки, в том числе мягкое устройство в форме гриба для отжиманий, храповой зажим для поднятия тяжестей и вогнутый плавник для плавания, помогли мне ощутить наибольшую функциональность, которую я когда-либо получал от протеза руки. .
Эти пластмассовые и силиконовые насадки, в том числе мягкое устройство в форме гриба для отжиманий, храповой зажим для поднятия тяжестей и вогнутый плавник для плавания, помогли мне ощутить наибольшую функциональность, которую я когда-либо получал от протеза руки. .
Такие низкотехнологичные протезы для активности и протезы с питанием от тела работают на удивление хорошо, а стоимость бионических рук составляет ничтожную долю. Они не выглядят и не действуют как человеческие руки, и от этого они функционируют лучше. Согласно Швейцеру, протезы с приводом от тела
инженеры регулярно называют его «мистическим» или насмешливо называют «капитаном Крюком». Будущие бионические плечи и локти могут иметь огромное значение в жизни людей, у которых отсутствует конечность до плеча, если предположить, что эти устройства можно будет сделать надежными и доступными. Но для Швейцера и большого процента пользователей, неудовлетворенных своими миоэлектрическими протезами, индустрия протезов еще не предложила ничего принципиально лучшего или более дешевого, чем протезы с питанием от тела.
Прорывы, которых мы хотим
Бионические руки стремятся сделать людей с ограниченными возможностями «цельными», чтобы мы участвовали в мире, который в культурном отношении двурукий. Но гораздо важнее, чтобы мы жили так, как хотим, с доступом к необходимым нам инструментам, чем чтобы мы выглядели как все. В то время как многие люди с разными конечностями использовали бионические руки для взаимодействия с миром и самовыражения, многовековые усилия по совершенствованию бионической руки редко сосредотачиваются на нашем жизненном опыте и том, что мы хотим делать в своей жизни.
Нам обещали прорыв в технологии протезирования на протяжении большей части 100 лет. Мне вспоминается научный ажиотаж вокруг выращенного в лаборатории мяса, который кажется одновременно взрывным сдвигом и признаком интеллектуальной капитуляции, когда политические и культурные изменения игнорируются в пользу технологического исправления. С персонажами в мире протезирования — врачами, страховыми компаниями, инженерами, протезистами и военными — которые десятилетиями играют одни и те же роли, почти невозможно создать что-то действительно революционное.