Содержание
удивительные и перспективные проекты / Хабр
Несмотря на существование магнитных микроботов, ученые продолжают искать компромисс — простое и функциональное решение в конструировании крошечных роботов. Они могут быть полезны в медицине, разведке завалов и исследовании ареалов.
Под катом собрали перспективные проекты роботов-насекомых. Каких размеров и форм они бывают, как работают — рассказываем в подборке.
HAMR-F — робот-таракан
Миниатюризация приводит исследователей на стык электроники и «примитивных» механизмов. К первой группе относится последняя версия гарвардского робота-таракана HAMR-F, которая вышла в 2018 году.
HAMR-F. Источник
Цель была проста — сделать мобильного и небольшого робота для исследования труднодоступных мест.
Устройство HAMR-F
На борту установлены два микроконтроллера, приводы для управления клешнями и литий-полимерная батарея на 8 мАч. Полностью собранный робот весит 2,8 грамма, а его длина — 4,5 см. Относительно следующих проектов это много. HAMR-F не только самый габаритный, но и самый тяжелый среди «насекомых».
Полностью собранный робот весит 2,8 грамма, а его длина — 4,5 см. Относительно следующих проектов это много. HAMR-F не только самый габаритный, но и самый тяжелый среди «насекомых».
Возможности и перспективы
Зато робот опережает конкурентов в скорости: HAMR-F может пробежать 17,2 см за секунду. Это почти в 4 раза больше его длины.
Робот-муравей MicroTug
MicroTug. Источник
В 2015 году ученые из Стэнфорда создали робота, который может передвигать массу, превышающую его собственную в 2000 раз. Притом, что масса «муравья» составляет 12 г.
Демонстрация возможностей MicroTug
Устройство робота
Можно подумать, что брюшко робота прилегает вплотную к поверхности и создает вакуум, но это не совсем так.
На брюшке расположен механизм, который опускает клейкую основу до упора с поверхностью. Трос подтягивает груз и робот отцепляется от поверхности. Такие рывки робот продолжает делать, пока не доползет до пункта назначения. В остальном устройство робота напоминает HAMR-F.
Трос подтягивает груз и робот отцепляется от поверхности. Такие рывки робот продолжает делать, пока не доползет до пункта назначения. В остальном устройство робота напоминает HAMR-F.
Как и HAMR-F, робот может исследовать только наземные объекты. Но это не единственная «среда обитания» роботов-насекомых. Доказательство этому — проект RoboBee.
RoboBee — пчела-рыба
В 2013 году группа ученых из Гарвардского университета представила робота-пчелу.
Невооруженным взглядом робота сложно отличить от летающего полосатого насекомого. Хотя, кажется, робот больше напоминает стрекозу.
RoboBee. Источник
Его габариты соответствующие: длина — 3 см, масса — 80 мг. Даже звук от крыльев напоминает шелест крыльев стрекозы. Притом частота взмахов стрекозинных крыльев меньше, чем у RoboBee: 80 Гц против 120 Гц.
Взлет RoboBee
Устройство RoboBee
Системы управления RoboBee были разработаны с нуля. Крошечный робот использует пьезоэлектрические приводы, которые расширяются и сжимаются при воздействии электромагнитного поля. Пьезоэлектрический моторочик — одна из немногих миниатюрных альтернатив электромагнитных двигателей.
Крошечный робот использует пьезоэлектрические приводы, которые расширяются и сжимаются при воздействии электромагнитного поля. Пьезоэлектрический моторочик — одна из немногих миниатюрных альтернатив электромагнитных двигателей.
Корпус RoboBee выполнен из углеродистого волокна. Это придает роботу легкость и прочность. Крылья могут вращаться как синхронно, так и по отдельности.
Конструкция RoboBee. Источник
Конкретно у первой модели есть проблемы с питанием. По аналогии с роботом-оригами Mori, о котором мы писали в предыдущей статье, к роботу через медный кабель подключен внешний источник питания. Оттого полеты RoboBee могут напоминать игру с воздушным змеем.
Полеты под водой
В 2015 году разработчики доработали проект и заявили, что робот может перемещаться под водой. Но не все так однозначно: вторая версия RoboBee способна лишь на переход из воздушной среды в воду.
RoboBee переходит из воздуха в воду
Робот не может сделать обратный переход из воды в воздух. Это связано с тем, что плотность воды в 100 раз больше плотности воздуха. Когда робот помещается в воду, частота взмахов тут же снижается до 9-13 Гц. Набрать обороты заново проблематично.
Это связано с тем, что плотность воды в 100 раз больше плотности воздуха. Когда робот помещается в воду, частота взмахов тут же снижается до 9-13 Гц. Набрать обороты заново проблематично.
Решения проблем
Третья версия
В 2017 году инженеры показали миру третью версию RoboBee, которая умеет выныривать из воды. Робот стал меньше по длине (2 см), но тяжелее в два раза (175 мг).
Результата удалось достичь с помощью новых элементов в конструкции, которые помогают роботу на каждом этапе выныривания:
- Робот плывет к поверхности и собирает воду в воздушное отделение.
- Электролитическая пластина преобразует воду в газ, который выталкивает робота из воды. Угловые поплавки помогают роботу стабилизироваться.
RoboBee вылетает из воды. Источник
Четвертая версия
Через два года разработчики выпустили последнюю на сегодняшний день версию RoboBee. Робот может летать без подключения ко внешним источникам питания.
Робот может летать без подключения ко внешним источникам питания.
RoboBee 4*. Источник
Инженеры добились компромисса между массой и мощностью. Они разместили на борту пчелы аккумулятор, электронику и солнечные батареи для подзарядки «на лету». Кроме того, была добавлена вторая пара крыльев. Это нужно для увеличения грузоподъемности робота. Новая версия весит около 259 мг.
Однако робот не приспособлен к работе в водной среде, как и третья версия не может работать автономно. Появится ли универсальная версия — открытый вопрос. Если получится, проект подойдет для разведки любых местностей и завалов.
Трехногий муравей DEAnsect
В некоторых задачах важно, чтобы робот мог выдержать, например, удар мухобойкой.
DEAnsect, удар мухобойкой
На это способен эластичный робот DEAnsect, разработанный в 2019 году учеными из политехнического университета Лозанны. Вернее, инженеры выпустили две модели DEAnsect, одна из которых — эластичная.
Вернее, инженеры выпустили две модели DEAnsect, одна из которых — эластичная.
Модели проекта
Модель с батарейкой
Робот с аккумулятором, микросхемой и фотодиодами, благодаря которым он может двигаться по начерченному узору.
Движение DEAnsect по траектории. Источник
В автономном режиме DEAnsect 1* может работать до 14 минут. Длина робота составляет всего 40 мм, а масса — 190 мг.
Проводная, без платы и фотодиодов
DEAnsect 2* — более «живучая» модель, так как текстолитовое основание заменено на упругую диэлектрическую подложку. На робота можно даже наступить, и ему ничего не будет.
Устройство и движение
В основе устройства — искусственные мускулы из упругой диэлектрической мембраны (эластомера), которые заключены между парами гибких электродов.
Механизм движения ножки DEAnsect
При подаче напряжения на электроды проводники притягиваются и стягивают мембраны.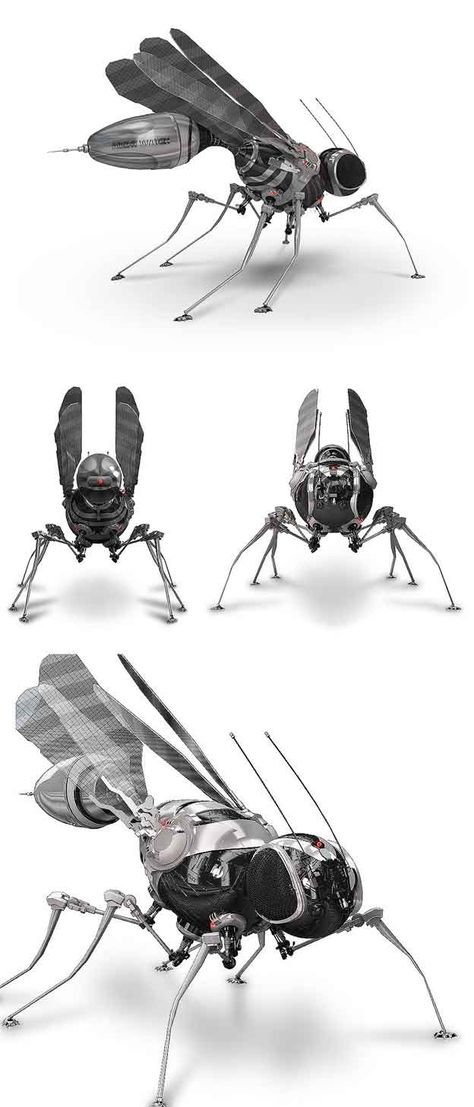 В результате мускулы вытягиваются и подтягивают за собой три ножки. При снятии напряжения мембраны возвращаются в исходное состояние, подтягивая уже тело к ножкам.
В результате мускулы вытягиваются и подтягивают за собой три ножки. При снятии напряжения мембраны возвращаются в исходное состояние, подтягивая уже тело к ножкам.
Толщина каждой из ножек не превышает 18 мкм. Это тоньше крыла стрекозы. Шаги у них соответствующие — всего 20 мкм.
Ученым удалось достичь скорости до 3 см/c. Для этого каждая ножка должна делать по 450 шагов в секунду.
Движение ножки DEAnsect
Необычная гусеница — Electrostatic crawler
В 2017 году группа исследователей из США и Китая представила робота, способного передвигаться под действием постоянного напряжения.
Робот всего 20 мм в длину, а его масса — 190 мг. Конструктивно он состоит из легкого пластикового корпуса, оснований из углеродного волокна, электродов, лапок, керамического конденсатора и консольной балки (проволоки).
Электроды, конденсатор и проволока нужны в механизме автоколебаний, который «заставляет» гусеницу двигаться.
Возможно, эти тексты тоже вас заинтересуют:
→ Модульные роботы: проекты, за которыми стоит следить
→ Малые ядерные реакторы как один из путей решения энергетического кризиса: NuScale все ближе к цели
→ Ноутбуки с гибкими экранами: реальные устройства и концепты, которые предлагают разные компании
Автоколебания и движение
К одному основанию прикреплена никель-титановая (NiTi) консольная балка (проволока), у нее есть свободные электроны. Сама проволока находится между электродными пластинами, которые заряжаются от конденсатора емкостью 10 нФ. Постепенно на электроды подается напряжение (3кВ) и пластины разноименно заряжаются.
Электростатическое поле между анодом и катодом. Источник
Между электродными пластинами возникает напряжение и электрическое поле, которое «перемещает» проволоку со свободными электронами в сторону положительно заряженной пластины.
Коснувшись пластины, проволока «передает» на нее свободные электроны. Суммарный заряд проволоки становится положительным, а заряд пластины — «более нейтральным».
Теперь проволока двигается уже в сторону отрицательно заряженной пластины. При соприкосновении происходит то же самое. Стоит отметить, что конденсатор разряжается и компенсирует «похищенные» заряды на электродных пластинах.
Механизм автоколебаний микроконсоли подробно описан в отдельной статье.
В системе работает закон сохранения импульса. Когда проволока двигается, она изменяет суммарный импульс и отклоняет его от нуля.
Система стремится компенсировать отклонение, и робот начинает вращаться относительно задних ножек. Поворот происходит в стороны, противоположные направлениям движения проволоки. В результате гусеница движется по зигзагообразной траектории. Для наглядности покажем на схеме:
Робот может перемещаться со скоростью 2 мм/c в течение 10 секунд. Длительность жизненного цикла ограничивается лишь емкостью конденсатора. Если знаете менее массивные и более высокоемкие альтернативы керамического конденсатора — напишите в комментариях.
Длительность жизненного цикла ограничивается лишь емкостью конденсатора. Если знаете менее массивные и более высокоемкие альтернативы керамического конденсатора — напишите в комментариях.
RoBeetle — жук на метаноле
Предыдущие проекты сильно зависели от электричества. Альтернативу предлагают изобретатели из Лаборатории автономных роботов Университета Южной Калифорнии, которые изобрели RoBeetle.
Это робот-жук, способный передвигаться более двух часов без внешних источников питания. Кроме того, робот получился небольшим, с массой 88 мг и длиной 15 мм.
RoBeetle. Источник
При чем здесь метанол
Долгосрочной автономности ученые добились с помощью жидкого топлива на метаноле, который питает искусственные мышцы из никель-титана. У сплава есть память формы. Мускулы растягиваются при нагреве и стягиваются при охлаждении. Также на поверхность мускул нанесен тонкий слой никеля.
На верхней стороне жука расположены отверстия, через которые испаряется метанол. Пары метанола при взаимодействии с нанесенным никелем приводят к окислению и нагреву никель-титановых проволок.
В результате мышца растягивается, вместе с ней движутся передние ноги RoBeetle. Одновременно с этим закрываются отверстия, через которые испаряется метанол. Проволока прекращает нагреваться и остывает, а мышца сокращается в обратную сторону и подтягивает за собой ноги с корпусом.
Движение робо-жука
Несмотря на то, что мышца нагревается за секунду до 100 ºС, она быстро охлаждается из-за небольших габаритов. Получается, чем быстрее нагрев и охлаждение мускулов, тем больше скорость передвижения RoBeetle.
Над чем стоит работать
Полный отказ от электроники — это преимущество и проклятие RoBeetle. Пока непонятно, как управлять роботом. Он умеет двигаться только вперед. Однако может нести на своих лапках груз массой 229 мг. Напомним, что сам робот весит 88 мг.
Напомним, что сам робот весит 88 мг.
RoBeetle переносит груз. Источник
6 необычных роботов-насекомых — Техника на vc.ru
Роботы-насекомые крошечные, но при этом перспективные механизмы. Например, они могут быть полезны в медицине или в разведке труднодоступных мест. В тексте рассказываем о шести таких проектах и показываем необычных «букашек».
32 716
просмотров
HAMR-F — робот-таракан
В 2018 году гарвардские ученые разработали робота-таракана. Он должен был помочь людям в исследованиях труднодоступных мест.
HAMR-F. Источник
Цель исследователей была проста — сделать мобильного и небольшого робота для исследования труднодоступных мест. В осуществлении задумки помогла микроэлектроника: на борту «таракана» установлены два микроконтроллера, приводы для управления клешнями и батарейка на 8 мАч.
Полностью собранный робот весит 2,8 г, а его длина — 4,5 см.
HAMR-F не только самый габаритный среди роботов в подборке, но и самый тяжелый. При этом он может пробежать 17,2 см за секунду — это почти в 4 раза больше его длины!
Сильный как муравей — робот MicroTug
В 2015 году ученые из Стэнфорда создали робота-силача. Он смог передвинуть массу, превышающую его собственную в две тысячи раз. Это при том, что вес «муравья» составил всего 12 г.
MicroTug, демонстрация возможностей
Как работает?
На брюшке «муравья» расположен механизм, который опускает клейкую основу до упора с плоскостью. Трос подтягивает груз и робот отцепляется от поверхности. Такие рывки MicroTug продолжает делать, пока не доползет до пункта назначения.
Как и HAMR-F, робот может исследовать только наземные объекты. Но это не единственная «среда обитания» роботов-насекомых. Доказательство этому — RoboBee.
RoboBee — пчела-рыба
Выше мы уже писали про HAMR-F — наземного робота прямиком из Гарварда. Оказалось, ученые университета разработали также вариант для воздуха и воды — робота-пчелу RoboBee. У проекта есть несколько версий. Подробнее о каждой из них — в этом разделе.
Оказалось, ученые университета разработали также вариант для воздуха и воды — робота-пчелу RoboBee. У проекта есть несколько версий. Подробнее о каждой из них — в этом разделе.
Первая версия
Вышла в 2013 году. И хоть исследователи назвали робота пчелой, внешне он, кажется, больше похож на стрекозу.
Его габариты соответствующие: длина — 3 см, масса — 80 мг. Миниатюрности инженеры достигли благодаря хитрым пьезоэлектрическим моторчикам и прочному, легкому материалу из углеродистого волокна.
Даже звук полета RoboBee напоминает шелест крыльев стрекозы. Хотя их частота меньше, чем у робота: 80 Гц против 120 Гц.
Первая модель RoboBee не работала автономно: требовалось подключение к внешнему источнику питания через протянутый провод. Оттого полеты робота могут напоминать игру с воздушным змеем.
Вторая версия
Через два года разработчики доработали проект и заявили, что робот может перемещаться под водой. Но не все так однозначно: вторая версия RoboBee способна лишь на переход из воздушной среды в воду.
Но не все так однозначно: вторая версия RoboBee способна лишь на переход из воздушной среды в воду.
RoboBee переходит из воздуха в воду
При погружении в воду частота взмахов падает настолько, что робот не может сделать обратный переход из воды в воздух.
Решения проблем
В 2017 году инженеры показали миру третью версию RoboBee, которая умеет выныривать из воды. Этого удалось достичь с помощью новых элементов в конструкции — они помогают роботу на каждом этапе выныривания.
Робот плывет к поверхности и собирает воду в воздушное отделение.
- Электролитическая пластина преобразует воду в газ, который выталкивает робота из воды. Угловые поплавки помогают роботу стабилизироваться.
RoboBee 3* вылетает из воды. Источник
Четвертая версия
Через два года разработчики выпустили последнюю версию RoboBee, которая может летать без подключения к внешним источникам питания.
RoboBee 4*. Источник
Исследователи добились компромисса между массой и мощностью: добавили электронику, дополнительную пару крыльев, аккумулятор и солнечные батареи.
Однако робот не приспособлен к работе в водной среде — как и третья версия он не может работать автономно. Появится ли универсальная версия — открытый вопрос. Если получится, проект подойдет для разведки любых местностей и завалов.
Трехногий муравей DEAnsect
В 2019 году ученые из политехнического университета Лозанны выпустили две версии робота-муравья DEAnsect. Первый — автономный и умный (может двигаться по прочерченному пути), а второй — эластичный и ударостойкий.
Автономная модель может работать без подзарядки до 14 минут. Зато более «живучая» версия не боится удара мухобойкой.
DEAnsect, удар мухобойкой
Устройство и движение
В основе устройства — искусственные мускулы из упругой диэлектрической мембраны, которые заключены между парами гибких электродов.
Механизм движения ножки DEAnsect
При подаче напряжения на электроды проводники притягиваются и стягивают мембраны. В результате мускулы вытягиваются и подтягивают за собой три ножки. При снятии напряжения мембраны возвращаются в исходное состояние, подтягивая уже тело к ножкам.
Ножки тоньше крыльев стрекозы и двигаются со скоростью до 3 см/с.
Движение ножки DEAnsect
Необычная гусеница — Electrostatic crawler
В 2017 году группа исследователей из США и Китая представила робота, который состоит всего из четырех компонентов: легкого корпуса, пары электродов, конденсатора и проволоки.
Несмотря на свои небольшие габариты (20 мм в длину, масса — 90 мг), Electrostatic Crawler автономен. Без внешнего источника питания робот может перемещаться со скоростью 2 мм/c в течение 10 секунд. Длительность жизненного цикла ограничивается лишь емкостью конденсатора, который выступает в роли аккумулятора.
Как это работает?
Движение вызвано вибрацией конструкции из-за колебаний проволоки между электродами, на которые постепенно подается напряжение с конденсатора емкость 10 нФ.
В результате робот двигается вперед по зигзагообразной траектории. Для наглядности покажем на схеме:
RoBeetle — жук на метаноле
Предыдущие проекты сильно зависели от электричества. Альтернативу предлагают изобретатели из Лаборатории автономных роботов Университета Южной Калифорнии — они изобрели RoBeetle. Это робот-жук, способный передвигаться более двух часов без внешних источников питания. Масса робота 88 мг, длина 15 мм.
RoBeetle. Источник
При чем здесь метанол
Долгосрочной автономности ученые добились с помощью жидкого топлива на метаноле, который питает искусственные мышцы из никель-титана. У сплава есть память формы. Мускулы растягиваются при нагреве и стягиваются при охлаждении. Также на поверхность мускул нанесен тонкий слой никеля.
На верхней стороне жука расположены отверстия, через которые испаряется метанол. Пары метанола при взаимодействии с нанесенным никелем приводят к окислению и нагреву никель-титановых проволок.
В результате мышца растягивается, вместе с ней движутся передние ноги RoBeetle. Одновременно с этим закрываются отверстия, через которые испаряется метанол. Проволока прекращает нагреваться и остывает, а мышца сокращается в обратную сторону и подтягивает за собой ноги с корпусом.
Движение RoBeetle
Несмотря на то, что мышца нагревается за секунду до 100 ºС, она быстро охлаждается из-за небольших габаритов. Получается, чем быстрее нагрев и охлаждение мускулов, тем больше скорость передвижения RoBeetle.
Над чем стоит работать
Полный отказ от электроники — это преимущество и проклятие RoBeetle. Пока непонятно, как управлять роботом. Он умеет двигаться только вперед. Однако может нести на своих лапках груз массой 229 мг. Напомним, что сам робот весит 88 мг.
RoBeetle переносит груз. Источник
Какой робот вам понравился больше? Напишите аргументы в пользу своего любимчика в комментариях и подписывайтесь на блог Selectel.
Читайте также:
Роботы-насекомые со всех концов света: применение и перспективы
Инженеры и ученые постоянно сотрудничают, чтобы создавать более совершенных летающих роботов. Природа является отличным источником вдохновения для этих целей. Летающие насекомые и птицы дают прекрасное представление о том, как летать в воздухе. Микроскопическое воздушное транспортное средство (МВТС), обладающее способностью, остаться в воздухе в течение длительного времени, было бы неоценимым во многих приложениях: обеспечение обзора с высоты птичьего полета на зону бедствия, обнаружение опасных химических или биологических веществ или организация передачи сигнала в специальных сетях связи. Однако время полета воздушных роботов ограничено весом встроенного блока питания и сроком службы их механических компонентов. Кроме того, выносливость воздушных роботов существенно уменьшается, когда уменьшается размер устройства. Несмотря на существование магнитных микроботов, ученые продолжают искать компромисс — простое и функциональное решение в конструировании крошечных роботов.
Кроме того, выносливость воздушных роботов существенно уменьшается, когда уменьшается размер устройства. Несмотря на существование магнитных микроботов, ученые продолжают искать компромисс — простое и функциональное решение в конструировании крошечных роботов.
Воспользуйтесь нашими услугами
Они могут быть полезны в медицине, разведке и исследовании ареалов. Под катом собрали перспективные проекты роботов-насекомых. Каких размеров и форм они бывают, как работают — рассказываем в подборке.
Миниатюризация приводит исследователей на стык электроники и «примитивных» механизмов. К первой группе относится последняя версия гарвардского робота-таракана HAMR-F, которая вышла в 2018 году.
HAMR-F. Источник
Цель была проста — сделать мобильного и небольшого робота для исследования труднодоступных мест.
На борту установлены два микроконтроллера, приводы для управления клешнями и литий-полимерная батарея на 8 мАч. Полностью собранный робот весит 2,8 грамма, а его длина — 4,5 см. Относительно следующих проектов это много. HAMR-F не только самый габаритный, но и самый тяжелый среди «насекомых».
Относительно следующих проектов это много. HAMR-F не только самый габаритный, но и самый тяжелый среди «насекомых».
Зато робот опережает конкурентов в скорости: HAMR-F может пробежать 17,2 см за секунду. Это почти в 4 раза больше его длины.

MicroTug. Источник
В 2015 году ученые из Стэнфорда создали робота, который может передвигать массу, превышающую его собственную в 2000 раз. Притом, что масса «муравья» составляет 12 г.

Демонстрация возможностей MicroTug
Можно подумать, что брюшко робота прилегает вплотную к поверхности и создает вакуум, но это не совсем так.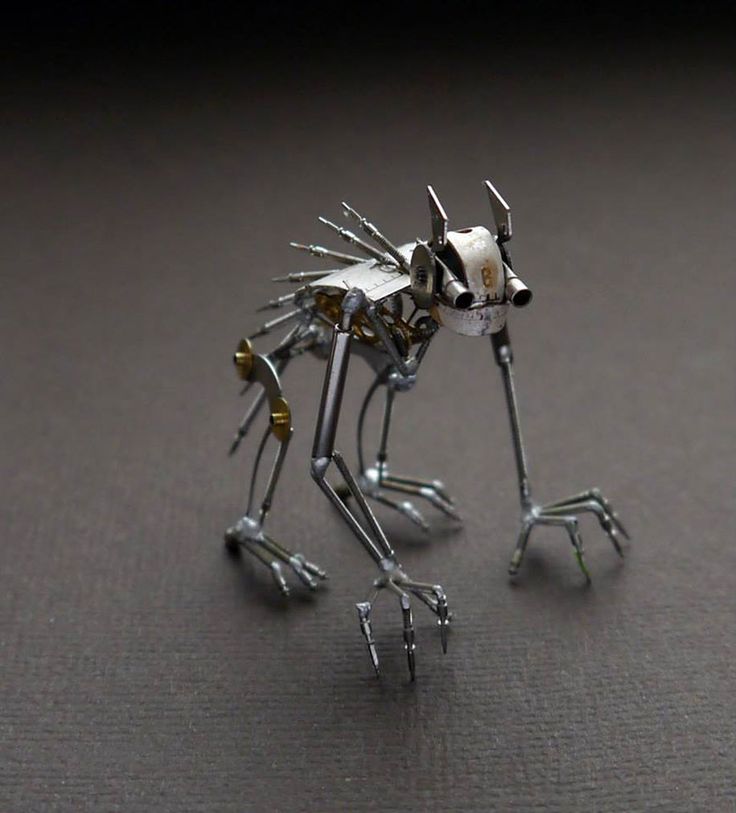
На брюшке расположен механизм, который опускает клейкую основа до упора с поверхностью. Трос подтягивает груз и робот отцепляется от поверхности. Такие рывки робот продолжает делать, пока не доползет до пункта назначения. В остальном устройство робота напоминает HAMR-F.
Как и HAMR-F, робот может исследовать только наземные объекты. Но это не единственная «среда обитания» роботов-насекомых. Доказательство этому — проект RoboBee.
В 2013 году группа ученых из Гарвардского университета представила робота-пчелу. Невооруженным взглядом робота сложно отличить от летающего полосатого насекомого. Хотя, кажется, робот больше напоминает стрекозу.
RoboBee. Источник
Его габариты соответствующие: длина — 3 см, масса — 80 мг. Даже звук от крыльев напоминает шелест крыльев стрекозы. Притом частота взмахов стрекозинных крыльев меньше, чем у RoboBee: 80 Гц против 120 Гц.

Взлет RoboBee
Системы управления RoboBee были разработаны с нуля. Крошечный робот использует пьезоэлектрические приводы, которые расширяются и сжимаются при воздействии электромагнитного поля. Пьезоэлектрический моторочик — одна из немногих миниатюрных альтернатив электромагнитных двигателей.
Крошечный робот использует пьезоэлектрические приводы, которые расширяются и сжимаются при воздействии электромагнитного поля. Пьезоэлектрический моторочик — одна из немногих миниатюрных альтернатив электромагнитных двигателей.
Корпус RoboBee выполнен из углеродистого волокна. Это придает роботу легкость и прочность. Крылья могут вращаться как синхронно, так и по отдельности.
Конструкция RoboBee. Источник
Конкретно у первой модели есть проблемы с питанием. По аналогии с роботом-оригами Mori, о котором мы писали в предыдущей статье, к роботу через медный кабель подключен внешний источник питания. Оттого полеты RoboBee могут напоминать игру с воздушным змеем.
В 2015 году разработчики доработали проект и заявили, что робот может перемещаться под водой. Но не все так однозначно: вторая версия RoboBee способна лишь на переход из воздушной среды в воду.

RoboBee переходит из воздуха в воду
Робот не может сделать обратный переход из воды в воздух. Это связано с тем, что плотность воды в 100 раз больше плотности воздуха. Когда робот помещается в воду, частота взмахов тут же снижается до 9-13 Гц. Набрать обороты заново проблематично.
Это связано с тем, что плотность воды в 100 раз больше плотности воздуха. Когда робот помещается в воду, частота взмахов тут же снижается до 9-13 Гц. Набрать обороты заново проблематично.
В 2017 году инженеры показали миру третью версию RoboBee, которая умеет выныривать из воды. Робот стал меньше по длине (2 см), но тяжелее в два раза (175 мг).
Результата удалось достичь с помощью новых элементов в конструкции, которые помогают роботу на каждом этапе выныривания:
- Робот плывет к поверхности и собирает воду в воздушное отделение.
- Электролитическая пластина преобразует воду в газ, который выталкивает робота из воды. Угловые поплавки помогают роботу стабилизироваться.
RoboBee вылетает из воды. Источник
Через два года разработчики выпустили последнюю на сегодняшний день версию RoboBee. Робот может летать без подключения ко внешним источникам питания.
RoboBee 4*. Источник
Инженеры добились компромисса между массой и мощностью. Они разместили на борту пчелы аккумулятор, электронику и солнечные батареи для подзарядки «на лету». Кроме того, была добавлена вторая пара крыльев. Это нужно для увеличения грузоподъемности робота. Новая версия весит около 259 мг.
Они разместили на борту пчелы аккумулятор, электронику и солнечные батареи для подзарядки «на лету». Кроме того, была добавлена вторая пара крыльев. Это нужно для увеличения грузоподъемности робота. Новая версия весит около 259 мг.
Однако робот не приспособлен к работе в водной среде, как и третья версия не может работать автономно. Появится ли универсальная версия — открытый вопрос. Если получится, проект подойдет для разведки любых местностей и завалов.
В некоторых задачах важно, чтобы робот мог выдержать, например, удар мухобойкой.

DEAnsect, удар мухобойкой
На это способен эластичный робот DEAnsect, разработанный в 2019 году учеными из политехнического университета Лозанны. Вернее, инженеры выпустили две модели DEAnsect, одна из которых — эластичная.
Вернее, инженеры выпустили две модели DEAnsect, одна из которых — эластичная.
Робот с аккумулятором, микросхемой и фотодиодами, благодаря которым он может двигаться по начерченному узору.
Движение DEAnsect по траектории. Источник
В автономном режиме DEAnsect 1* может работать до 14 минут. Длина робота составляет всего 40 мм, а масса — 190 мг.
DEAnsect 2* — более «живучая» модель, так как текстолитовое основание заменено на упругую диэлектрическую подложку. На робота можно даже наступить, и ему ничего не будет.
В основе устройства — искусственные мускулы из упругой диэлектрической мембраны (эластомера), которые заключены между парами гибких электродов.

Механизм движения ножки DEAnsect
При подаче напряжения на электроды проводники притягиваются и стягивают мембраны. В результате мускулы вытягиваются и подтягивают за собой три ножки. При снятии напряжения мембраны возвращаются в исходное состояние, подтягивая уже тело к ножкам.
В результате мускулы вытягиваются и подтягивают за собой три ножки. При снятии напряжения мембраны возвращаются в исходное состояние, подтягивая уже тело к ножкам.
Толщина каждой из ножек не превышает 18 мкм. Это тоньше крыла стрекозы. Шаги у них соответствующие — всего 20 мкм.
Ученым удалось достичь скорости до 3 см/c. Для этого каждая ножка должна делать по 450 шагов в секунду.
В 2017 году группа исследователей из США и Китая представила робота, способного передвигаться под действием постоянного напряжения.
Робот всего 20 мм в длину, а его масса — 190 мг. Конструктивно он состоит из легкого пластикового корпуса, оснований из углеродного волокна, электродов, лапок, керамического конденсатора и консольной балки (проволоки).
Электроды, конденсатор и проволока нужны в механизме автоколебаний, который «заставляет» гусеницу двигаться.
К одному основанию прикреплена никель-титановая (NiTi) консольная балка (проволока), у нее есть свободные электроны. Сама проволока находится между электродными пластинами, которые заряжаются от конденсатора емкостью 10 нФ. Постепенно на электроды подается напряжение (3кВ) и пластины разноименно заряжаются.
Электростатическое поле между анодом и катодом. Источник
Между электродными пластинами возникает напряжение и электрическое поле, которое «перемещает» проволоку со свободными электронами в сторону положительно заряженной пластины.
Коснувшись пластины, проволока «передает» на нее свободные электроны. Суммарный заряд проволоки становится положительным, а заряд пластины — «более нейтральным».
Теперь проволока двигается уже в сторону отрицательно заряженной пластины. При соприкосновении происходит то же самое. Стоит отметить, что конденсатор разряжается и компенсирует «похищенные» заряды на электродных пластинах. В системе работает закон сохранения импульса. Когда проволока двигается, она изменяет суммарный импульс и отклоняет его от нуля.
Система стремится компенсировать отклонение, и робот начинает вращаться относительно задних ножек. Поворот происходит в стороны, противоположные направлениям движения проволоки. В результате гусеница движется по зигзагообразной траектории. Для наглядности покажем на схеме:
Робот может перемещаться со скоростью 2 мм/c в течение 10 секунд. Длительность жизненного цикла ограничивается лишь емкостью конденсатора. Если знаете менее массивные и более высокоемкие альтернативы керамического конденсатора — напишите в комментариях.
Предыдущие проекты сильно зависели от электричества. Альтернативу предлагают изобретатели из Лаборатории автономных роботов Университета Южной Калифорнии, которые изобрели RoBeetle.
Это робот-жук, способный передвигаться более двух часов без внешних источников питания. Кроме того, робот получился небольшим, с массой 88 мг и длиной 15 мм.
RooBeetle. Источник
Долгосрочной автономности ученые добились с помощью жидкого топлива на метаноле, который питает искусственные мышцы из никель-титана.У сплава есть память формы. Мускулы растягиваются при нагреве и стягиваются при охлаждении. Также на поверхность мускул нанесен тонкий слой никеля.
На верхней стороне жука расположены отверстия, через которые испаряется метанол. Пары метанола при взаимодействии с нанесенным никелем приводят к окислению и нагреву никель-титановых проволок.
В результате мышца растягивается, вместе с ней движутся передние ноги RoBeetle. Одновременно с этим закрываются отверстия, через которые испаряется метанол. Проволока прекращает нагреваться и остывает, а мышца сокращается в обратную сторону и подтягивает за собой ноги с корпусом.

Движение робо-жука
Несмотря на то, что мышца нагревается за секунду до 100 ºС, она быстро охлаждается из-за небольших габаритов. Получается, чем быстрее нагрев и охлаждение мускулов, тем больше скорость передвижения RoBeetle.
Полный отказ от электроники — это преимущество и проклятие RoBeetle. Пока непонятно, как управлять роботом. Он умеет двигаться только вперед. Однако может нести на своих лапках груз массой 229 мг. Напомним, что сам робот весит 88 мг.
RooBeetle переносит груз. Источник
Автор: Влад Ефименко
Источник: https://habr.com/
Воспользуйтесь нашими услугами
Роботы насекомые в Тобольске: 500-товаров: бесплатная доставка, скидка-56% [перейти]
Партнерская программаПомощь
Тобольск
Каталог
Каталог Товаров
Одежда и обувь
Одежда и обувь
Стройматериалы
Стройматериалы
Текстиль и кожа
Текстиль и кожа
Здоровье и красота
Здоровье и красота
Детские товары
Детские товары
Электротехника
Электротехника
Продукты и напитки
Продукты и напитки
Промышленность
Промышленность
Мебель и интерьер
Мебель и интерьер
Вода, газ и тепло
Вода, газ и тепло
Сельское хозяйство
Сельское хозяйство
Все категории
ВходИзбранное
Роботы насекомые
1 479
2850
Паук на радиоуправлении, игрушка, робот паук, пульте управления, радиоуправляемый, радиоуправляемое насекомое, инфракрасное управление, размер 37 х 8,5 3 см
В МАГАЗИНЕще цены и похожие товары
1 100
2420
Паук на радиоуправлении ТМ «Компания друзей», «Черная вдова» со световыми эффектами, 3 канала, игрушка робот пульте управления, насекомое, движение вперед, поворот направо
В МАГАЗИНЕще цены и похожие товары
688
1245
Tongde Насекомое / Робот Пчела 9923 Жук на радиоуправлении Игрушка Пульте Управления, 27MHz, в коробке
В МАГАЗИНЕще цены и похожие товары
1 299
2990
Паук на радиоуправлении, детская игрушка, робот пульте управления, радиоуправляемое насекомое с парогенератором
В МАГАЗИНЕще цены и похожие товары
1 100
2420
Таракан игрушка на радиоуправлении Компания друзей со световыми эффектами, 3 канала, радиоуправляемое насекомое пульте управления, робот насекомое, движение вперед, демо режим, поворот направо, 7. 5 х 14 см
5 х 14 см
В МАГАЗИНЕще цены и похожие товары
894
1193
Tongde Насекомое / Робот Жук на радиоуправлении 6663 Игрушка Пульте Управления, в коробке Тип:
В МАГАЗИНЕще цены и похожие товары
893
1192
Tongde Насекомое / Робот Божья коровка Жук на радиоуправлении 9922 Игрушка Пульте Управления, 27MHz, в коробке
В МАГАЗИНЕще цены и похожие товары
3 220
3703
Робот Йеменский Хамелеон меняет цвета, ползает, ловит насекомых, 26 см Тип: Игрушечный робот,
В МАГАЗИНЕще цены и похожие товары
Радиоуправляемый робот Хамелеон ловитель насекомых — ZYB-B3497
ПОДРОБНЕЕЕще цены и похожие товары
Радиоуправляемый робот ZF Насекомое Белая Мокрица — ZF-9920B
ПОДРОБНЕЕЕще цены и похожие товары
833
1168
Tongde Насекомое / Робот / Божья коровка / Жук на радиоуправлении 9922 / Игрушка на Пульте Управления, 27MHz, в коробке
ПОДРОБНЕЕЕще цены и похожие товары
410
513
Инфракрасный Радиоуправляемый игрушечный животный, имитация насекомых, Электрический робот-жук, шалость на Хэллоуин, насекомые, детские игрушки
ПОДРОБНЕЕЕще цены и похожие товары
Интерактивное насекомое «Гигантский таракан» р/у, световые эффекты Junfa 1288 Производитель: Junfa
ПОДРОБНЕЕЕще цены и похожие товары
1 300
2400
Таракан игрушка на радиоуправлении Компания друзей со световыми эффектами, 3 канала, радиоуправляемое насекомое на пульте управления, робот насекомое, движение вперед, демо режим, поворот направо, 7. 5 х 14 см
5 х 14 см
ПОДРОБНЕЕЕще цены и похожие товары
Джамбо тойз / Интерактивные насекомые и пресмыкающиеся. Божья коровка ИК управление, световые эффекты, Джамбо тойз
ПОДРОБНЕЕЕще цены и похожие товары
Интерактивные насекомые и пресмыкающиеся. Гиганский таракан р/у , световые эффекты Тип: робот,
ПОДРОБНЕЕЕще цены и похожие товары
Pilotage / Радиоуправляемая детская игрушка робот насекомое в виде божье коровки / подарок для мальчика,девочки,малыша
ПОДРОБНЕЕЕще цены и похожие товары
834
1169
Tongde Насекомое / Робот / Жук на радиоуправлении 6663 / Игрушка на Пульте Управления, в коробке
ПОДРОБНЕЕЕще цены и похожие товары
1 350
2700
Игрушка на радиоуправлении Таракан ТМ Компания Друзей, 3 канала, робот, насекомое радиоуправляемое, на пульте управления, JB1168270
ПОДРОБНЕЕЕще цены и похожие товары
Радиоуправляемый робот ZF Насекомое Серая Мокрица — ZF-9920A
ПОДРОБНЕЕЕще цены и похожие товары
7 923
16590
Паук на радиоуправление/Паук радиоуправляемый черная вдова/со световыми эффектами/паук игрушка/робот паук/паук на пульте управления/ радиоуправляемое насекомое/движение вперед/подарок на день рождения/мальчику/на новый год/23 февраля
ПОДРОБНЕЕЕще цены и похожие товары
Джамбо тойз/Интерактивные насекомые и пресмыкающиеся. Гиганский таракан р/у , световые эффекты
Гиганский таракан р/у , световые эффекты
ПОДРОБНЕЕЕще цены и похожие товары
Интерактивные насекомые и пресмыкающиеся. Гиганский таракан ИК управление, световые эффекты
ПОДРОБНЕЕЕще цены и похожие товары
Джамбо тойз/Интерактивные насекомые и пресмыкающиеся. Божья коровка р/у, световые эффекты
ПОДРОБНЕЕЕще цены и похожие товары
Джамбо тойз / Интерактивные насекомые и пресмыкающиеся. Гиганский таракан ИК управление, световые эффекты, Джамбо тойз
ПОДРОБНЕЕЕще цены и похожие товары
Джамбо тойз / Интерактивные насекомые и пресмыкающиеся. Муха ИК управление, световые эффекты, Джамбо тойз
ПОДРОБНЕЕЕще цены и похожие товары
Робот Йеменский Хамелеон меняет цвета, ползает, ловит насекомых, 26 см Тип: робот, Цвет: зеленый,
ПОДРОБНЕЕЕще цены и похожие товары
2 страница из 18
Роботы насекомые в помощь авиации
Боевые насекомые
Военные Америки и Израиля разрабатывают системы контроля поведением и движением насекомых.![]() Похоже, что создание боевых насекомых – задача несколько проще, нежели пытаться создать искусственные летучие аналоги военного назначения.
Похоже, что создание боевых насекомых – задача несколько проще, нежели пытаться создать искусственные летучие аналоги военного назначения.
Первые эксперименты с Micro Air Vehicle (MAV) были организованы ЦРУ в начале 70-х годов. В музее ЦРУ в Лэнли до сих пор хранится образец летающей механической стрекозы. Главным предназначением стрекозы был шпионаж. Источник энергии для данного летательного аппарата до сих пор является засекреченной информацией.
Три типа микро беспилотных летательных аппарата. Инженеры используют небольшие вертолеты и БПЛА в лаборатории для разработки программного обеспечения
Сведения о роботах-насекомых начали просачиваться в прессу в 2007-2011 годах. По некоторым сообщениям, подобные аппараты снабжались энергией дистанционно лазером, при этом фюзеляж использовался в качестве антенны для сбора энергии. Подобная схема имеет очевидные ограничения – полет на сотни километров внутрь вражеской территории технически невозможен. В то же время, полицейское применение вполне реально и перспективно.
В то же время, полицейское применение вполне реально и перспективно.
Лейтенант ВВС США Грег Санбдек подготавливает микро беспилотник к летным испытаниям
В американской прессе, начиная с 2004 года время о времени появляются сообщения о том, что в больших городах некто увидел робонасекомое, висящее над бойкой улицей или даже летающее в каком-нибудь зале заседаний. В июле прошлого года ряд западных СМИ опубликовал статьи и фотографии об экспериментах на авиабазе ВВС США Райт-Паттерсон в Дейтон, Огайо. Лаборатория базы создает разные виды MAV’s целью которых является “обнаружение, слежение и наведение на врага в сложном урбанистическом окружении”.
Эксперименты возглавляет доктор Грегори Паркер. Его подчиненные создали несколько видов очень маленьких вертолетов и дронов, которые испытываются в комнатных условиях.
Лейтенант ВВС США Грег Санбдек и директор лаборатории Грегори Паркер наблюдают за испытательным полетом микро беспилотника
В 2009 пресс-релиз Пентагона заявил о создании “пчелы-киборга”, которой можно управлять с помощью лэптопа. Сообщалось о возможности контролировать взлет, полет и посадку пчелы, стимулируя различные участки мозга. Контроль осуществляется путем стимуляции базилярных мускул, заставляющих то или иное крыло работать сильнее. Вживленная в пчелу систему состоит из нервных и мускульных стимуляторов, микробатареи, микроконтроллера и приемопередатчика. Система вживляется в пчелу, когда она находится еще в куколочном состоянии. Эксперименты проходили на трех видах крупных камерунских пчел в университете Беркли, Калифорния. Самая маленькая пчела, использовавшаяся в экспериментах – 2 см длиной.
Сообщалось о возможности контролировать взлет, полет и посадку пчелы, стимулируя различные участки мозга. Контроль осуществляется путем стимуляции базилярных мускул, заставляющих то или иное крыло работать сильнее. Вживленная в пчелу систему состоит из нервных и мускульных стимуляторов, микробатареи, микроконтроллера и приемопередатчика. Система вживляется в пчелу, когда она находится еще в куколочном состоянии. Эксперименты проходили на трех видах крупных камерунских пчел в университете Беркли, Калифорния. Самая маленькая пчела, использовавшаяся в экспериментах – 2 см длиной.

9 апреля 2012 года газета “Гаарец” опубликовала обзор экспериментов с насекомыми в аэродинамической лаборатории технического университета Технион в Хайфе. Проект финансируется вооруженными силами США. Целью является дистанционный контроль за движением насекомых, как будто они – механические средства передвижения.

Вместо того, чтобы конструировать микро-самолет, длина которого не превысит несколько сантиметров, исследователи решили воспользоваться преимуществами, которые дают им 300 миллионов лет эволюции. Глава проекта, профессор Даниэль Вайхс, недавно работавший генеральным директором израильского министерства науки и технологий объясняет: “Для того, чтобы создать дроны в масштабах насекомого, вам нужны сложные системы мониторинга и контроля, а также необходим источник энергии для полета”. Вайхс не готов раскрывать подробности своих исследований, и даже целей их проведения. Он говорит, что сам толком не знает, какое конкретное применение им найдут военные.
Кроме Вайхса, которого газета называет “пионером аэронавтики насекомых”, в проекте занят доктор Галь Рибак и группа ученых тель-авивского университета. Аэродинамическая лаборатория Вайхса не похожа ни на одно подобное заведение в мире. В ней не найти ни одного образца самолетного оборудования. Вместо этого она наполнена аквариумами и ящиками, наполненными мухами, кузнечиками, пчелами, а также ведрами с растениями, на которых сидят стрекозы. В центре лаборатории стоит симулятор полетов – длинная труба с вентилятором. В нем висит кузнечик, яростно борющийся с создаваемым вентилятором лобовым ветром.
В ней не найти ни одного образца самолетного оборудования. Вместо этого она наполнена аквариумами и ящиками, наполненными мухами, кузнечиками, пчелами, а также ведрами с растениями, на которых сидят стрекозы. В центре лаборатории стоит симулятор полетов – длинная труба с вентилятором. В нем висит кузнечик, яростно борющийся с создаваемым вентилятором лобовым ветром.
На превом этапе исследователи изучили все малейшие движения, связанные с полетом насекомого. С этой целью в симулятор были установлены две камеры, записывавшие каждое движение мускулов летящего насекомого. В дополнение к этому сенсоры, вживленные в разные части тела насекомого, передавали электрические сигналы, получаемые во время полета. Это позволило ученым идентифицировать все импульсы, связанные с полетом.
Следующим этапом они “перевели” движения насекомого во время полета на язык кода, состоящего из электронных сигналов. Пользуясь этим кодом, они могут посылать сигналы мускулам насекомого и принуждать его к движению в желаемом направлении. Вайхс говорит: “Мы создали карту, которая показывает, что если сигнал А послан мускулу В насекомого, оно повернет вправо, если я введу С в мускул D, оно повернет влево”. Статья констатирует, что в мире есть пять лабораторий, занимающихся экспериментами подобного рода. Наиболее успешной считается лаборатория университета Мичигана. Там ученым удалось создать систему контроля над насекомыми издалека, и на протяжении длительного отрезка времени. В Хайфе исследователи могут контролировать насекомых на протяжении нескольких минут.
Вайхс говорит: “Мы создали карту, которая показывает, что если сигнал А послан мускулу В насекомого, оно повернет вправо, если я введу С в мускул D, оно повернет влево”. Статья констатирует, что в мире есть пять лабораторий, занимающихся экспериментами подобного рода. Наиболее успешной считается лаборатория университета Мичигана. Там ученым удалось создать систему контроля над насекомыми издалека, и на протяжении длительного отрезка времени. В Хайфе исследователи могут контролировать насекомых на протяжении нескольких минут.
Доктор Рибак говорит: “Самое важное – не только дистанционный контроль. Главный вызов – заставить насекомое полететь в нужный нам момент, сделать то, что нужно нам, с нашим минимальным вмешательством – только тогда, когда это необходимо”. По признанию Рибака, эксперта в биомеханике, до настоящего момента добиться этой цели не удалось. Пока что не удалось также добиться того, чтобы насекомые поворачивались влево или вправо по команде.
На вопрос о том, страдают ли жертвы его экспериментов Рибак ответил: “Я не знаю, и я не думаю, что кто-то с уверенностью может сказать, что знает. Мы тут не занимаемся хирургией. По сравнению с экспериментами над животными то, что делаем мы – детская игра”. Вайхс говорит: “Хельсинкская конвенция о защите прав животных не распространяется на насекомых. После имплантации электродов насекомое не должно чувствовать какой-то боли, так как электрические сигналы ничем не отличаются от тех, что порождает жизненный процесс самого насекомого. Мы просто говорим ему, когда нужно сделать то или иное движение, пользуясь этими сигналами”.
Мы тут не занимаемся хирургией. По сравнению с экспериментами над животными то, что делаем мы – детская игра”. Вайхс говорит: “Хельсинкская конвенция о защите прав животных не распространяется на насекомых. После имплантации электродов насекомое не должно чувствовать какой-то боли, так как электрические сигналы ничем не отличаются от тех, что порождает жизненный процесс самого насекомого. Мы просто говорим ему, когда нужно сделать то или иное движение, пользуясь этими сигналами”.
www.microdrones.com
Ученые построили математическую модель зрения насекомых для мобильных роботов
- Новость
- 2022
- апреля
- 15
- Ученые построили математическую модель зрения насекомых для мобильных роботов
15.04.2022
Команда ученых из Южно-Уральского государственного университета создала математическую модель сложного глаза насекомых, позже она будет использована для создания прототипа устройства на основе технологии компьютерного зрения.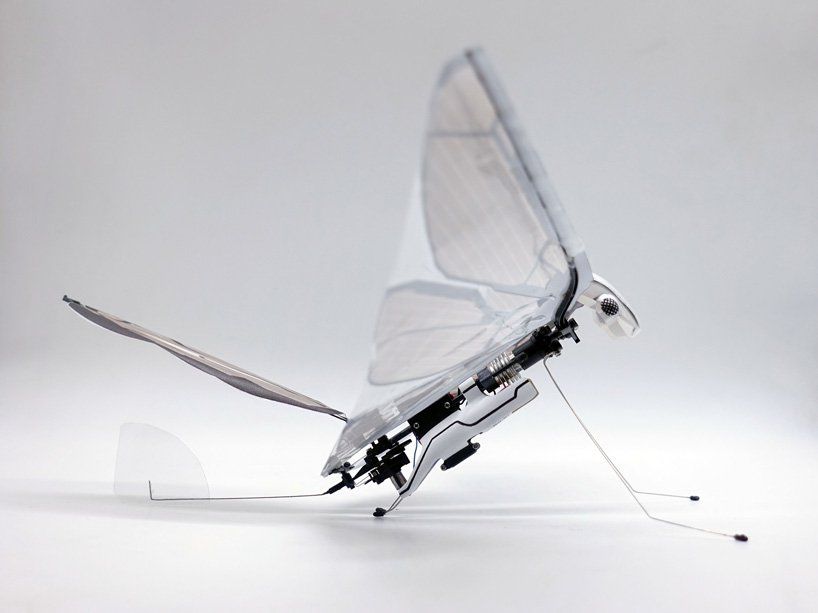 В дальнейшем с применением этих разработок возможно создание умных мобильных роботов для доставки лекарств людям, у которых нет возможности сходить в аптеку самостоятельно. Исследование было опубликовано в высокорейтинговом научном журнале Mathematics (Top-10 Web of Science).
В дальнейшем с применением этих разработок возможно создание умных мобильных роботов для доставки лекарств людям, у которых нет возможности сходить в аптеку самостоятельно. Исследование было опубликовано в высокорейтинговом научном журнале Mathematics (Top-10 Web of Science).
Разработки устройств с использованием компьютерного зрения – это очень актуальная и быстро развивающаяся область научных исследований. Китайские ученые, например, уже активно применяют подобные устройства на беспилотниках. Младший научный сотрудник кафедры системного программирования Артем Старков под руководством доктора физико-математических наук, профессора Леонида Соколинского создал уникальную двумерную математическую модель сложного зрения.
Новая математическая модель, созданная в ЮУрГУ, позволит решать сложные задачи навигации автономных мобильных роботов на земле и в воздухе. Идея ее создания вдохновлена составным глазом насекомого, состоящим из омматидиев, крошечных независимых фоторецептивных единиц.
«Глаза насекомого имеют принципиально иное строение, чем человеческие глаза. Там нет движущихся частей, и мухе, например, чтобы четко увидеть статичный объект, нужно повернуться, потому что ее глаза реагируют на движение. Наша модель первая и пока единственная, которая описывает плоскостное бинокулярное зрение сложного глаза, при этом делает возможным измерение расстояния и азимута до окружающих объектов. Видеосенсоры, похожие на сложные глаза насекомых, представляют собой многообещающую альтернативу цифровым камерам. Такие видеосенсоры не имеют движущихся частей и не требуют какого-либо управления», — поясняет Леонид Соколинский.
Модель обеспечивает необходимое и достаточное условие видимости объекта каждым омматидием. На этой основе составляется алгоритм генерации обучающего набора данных для создания двух глубоких нейронных сетей: первая обнаруживает расстояние, а вторая определяет азимут объекта. Результаты экспериментов показали, что предложенный метод может эффективно и точно определять данные параметры.
Эти и другие исследования позволят создавать роботов, способных работать автономно, без участия человека. Их можно будет применять на земле и в воздухе, где они смогут самостоятельно ориентироваться и достигать пункта назначения, обходя препятствия.
«Мы живем в мире, где технологии служат людям, обеспечивая их комфорт и безопасность. Представьте, как робот доставляет лекарства больному человеку, который не может покинуть дом. На подоконнике установлен специальный бокс, который открывается роботом со стороны улицы, а человеком из дома. Робот оставляет там необходимый человеку набор медикаментов, делая его жизнь немного лучше, немного дольше. Это и есть задача науки», — говорит Леонид Соколинский.
В ближайшее время совместно с кафедрой оптоинформатики планируется создание прототипа устройства с использованием разработанной технологии.
Исследование реализуется в рамках стратегического проекта «Интеллектуальное производство». Данный проект входит в число приоритетных направлений программы «Приоритет 2030».
Южно-Уральский государственный университет – это университет цифровых трансформаций, где ведутся инновационные исследования по большинству приоритетных направлений развития науки и техники. В соответствии со стратегией научно-технологического развития РФ университет сфокусирован на развитии крупных научных междисциплинарных проектов в области цифровой индустрии, материаловедения и экологии. В 2021 году ЮУрГУ победил в конкурсе по программе «Приоритет 2030». Вуз выполняет функции регионального проектного офиса Уральского межрегионального научно-образовательного центра мирового уровня (УМНОЦ).
СМИ о нас:
- ТАСС Наука: В России создали модель зрения насекомых для обеспечения сложной навигации роботов
- Министерство науки и высшего образования РФ: Обучить мобильных роботов навигации поможет модель зрения насекомых
- tut-news.ru: В России создали модель зрения насекомых для обеспечения сложной навигации роботов
Читайте нас:
- «Наука ЮУрГУ» в Яндекс.
 Дзен
Дзен - «ЮУрГУ News» в Telegram
- «Твой ЮУрГУ» в Одноклассники.ру
 Дзен
ДзенЕлена Кирякова, фото: архив Л. Соколинского, photogenica.ru
Контактное лицо по новости:
Отдел внешних коммуникаций, тел.: (351)272-30-11
роботов-светляков взлетают | Новости Массачусетского технологического института
Светлячки, освещающие темные дворы теплыми летними вечерами, используют свое свечение для общения — чтобы привлечь самку, отогнать хищников или заманить добычу.
Эти мерцающие жуки также вдохновили ученых Массачусетского технологического института. Следуя примеру природы, они создали электролюминесцентные мягкие искусственные мышцы для летающих роботов размером с насекомое. Крошечные искусственные мышцы, управляющие крыльями роботов, во время полета излучают цветной свет.
Эта электролюминесценция может позволить роботам общаться друг с другом. Например, если робот, который находит выживших, отправляется на поисково-спасательную операцию в разрушенное здание, он может использовать свет, чтобы сигнализировать другим и звать на помощь.
Способность излучать свет также приближает этих микророботов, которые весят чуть больше скрепки, на один шаг ближе к самостоятельным полетам за пределами лаборатории. Эти роботы настолько легкие, что не могут нести датчики, поэтому исследователи должны отслеживать их с помощью громоздких инфракрасных камер, которые плохо работают на открытом воздухе. Теперь они показали, что могут точно отслеживать роботов, используя свет, который они излучают, и всего три камеры смартфона.
«Если вы думаете о крупномасштабных роботах, они могут общаться, используя множество различных инструментов — Bluetooth, беспроводную связь и тому подобное. Но для крошечного робота с ограниченной мощностью мы вынуждены думать о новых способах общения. Это важный шаг к полетам этих роботов на открытом воздухе, где у нас нет хорошо настроенной, современной системы отслеживания движения», — говорит Кевин Чен, ассистент Д. Рейда Уидона-младшего. Профессор кафедры электротехники и компьютерных наук (EECS), заведующий лабораторией мягкой и микроробототехники Научно-исследовательской лаборатории электроники (НИЭ) и старший автор статьи.
Он и его сотрудники добились этого, внедрив крошечные электролюминесцентные частицы в искусственные мышцы. Этот процесс увеличивает вес всего на 2,5 процента, не влияя на летные характеристики робота.
Вместе с Ченом в статье участвуют аспиранты EECS Сухан Ким, ведущий автор, и Йи-Сюань Сяо; Ю Фан Чен СМ ’14, доктор философии ’17; и Цзе Мао, адъюнкт-профессор Университета Нинся. Исследование было опубликовано в этом месяце в IEEE Robotics and Automation Letters.
Световой привод
Эти исследователи ранее продемонстрировали новую технологию изготовления мягких приводов или искусственных мышц, которые взмахивают крыльями робота. Эти прочные приводы изготавливаются путем чередования ультратонких слоев эластомера и электрода из углеродных нанотрубок в пакете, а затем скатывания его в мягкий цилиндр. Когда к этому цилиндру прикладывается напряжение, электроды сжимают эластомер, и механическое напряжение взмахивает крылом.
Чтобы изготовить светящийся привод, команда включила в эластомер электролюминесцентные частицы сульфата цинка, но на этом пути пришлось преодолеть несколько проблем.
Сначала исследователи должны были создать электрод, который не блокировал бы свет. Они построили его, используя очень прозрачные углеродные нанотрубки, толщина которых составляет всего несколько нанометров и которые пропускают свет.
Однако частицы цинка загораются только в присутствии очень сильного и высокочастотного электрического поля. Это электрическое поле возбуждает электроны в частицах цинка, которые затем испускают субатомные частицы света, известные как фотоны. Исследователи используют высокое напряжение для создания сильного электрического поля в мягком приводе, а затем приводят робота в действие на высокой частоте, что позволяет частицам ярко светиться.
«Традиционно электролюминесцентные материалы очень затратны с точки зрения энергии, но в некотором смысле мы получаем эту электролюминесценцию бесплатно, потому что мы просто используем электрическое поле на частоте, необходимой для полета. Нам не нужны новые приводы, новые провода или что-то еще. Чтобы излучать свет, требуется всего на 3 процента больше энергии», — говорит Кевин Чен.
Создавая прототип привода, они обнаружили, что добавление частиц цинка снижает его качество, из-за чего он легче ломается. Чтобы обойти это, Ким добавила частицы цинка только в верхний слой эластомера. Он сделал этот слой на несколько микрометров толще, чтобы компенсировать любое снижение выходной мощности.
Хотя привод стал на 2,5% тяжелее, он излучал свет, не влияя на летные характеристики.
«Мы уделяем большое внимание поддержанию качества эластомерных слоев между электродами. Добавление этих частиц было почти похоже на добавление пыли в наш эластомерный слой. Потребовалось много разных подходов и много испытаний, но мы нашли способ гарантировать качество актуатора», — говорит Ким.
Регулировка химического состава частиц цинка изменяет цвет света. Исследователи создали зеленые, оранжевые и синие частицы для созданных ими исполнительных механизмов; каждый привод светится одним сплошным цветом.
Они также изменили процесс изготовления, чтобы приводы могли излучать разноцветный и узорчатый свет. Исследователи поместили крошечную маску поверх верхнего слоя, добавили частицы цинка, а затем вылечили привод. Они повторили этот процесс трижды с разными масками и цветными частицами, чтобы создать световой узор, обозначающий М-И-Т.
Исследователи поместили крошечную маску поверх верхнего слоя, добавили частицы цинка, а затем вылечили привод. Они повторили этот процесс трижды с разными масками и цветными частицами, чтобы создать световой узор, обозначающий М-И-Т.
Вслед за светлячками
После точной настройки процесса изготовления они проверили механические свойства приводов и использовали люминесцентный измеритель для измерения интенсивности света.
После этого они провели летные испытания с использованием специально разработанной системы отслеживания движения. Каждый электролюминесцентный привод служил активным маркером, который можно было отслеживать с помощью камер iPhone. Камеры определяют каждый цвет света, а разработанная ими компьютерная программа отслеживает положение и отношение роботов с точностью до 2 миллиметров от современных инфракрасных систем захвата движения.
«Мы очень гордимся тем, насколько хороши результаты отслеживания по сравнению с современным оборудованием. Мы использовали дешевое оборудование по сравнению с десятками тысяч долларов, которые стоят эти большие системы отслеживания движения, и результаты отслеживания были очень близкими», — говорит Кевин Чен.
Мы использовали дешевое оборудование по сравнению с десятками тысяч долларов, которые стоят эти большие системы отслеживания движения, и результаты отслеживания были очень близкими», — говорит Кевин Чен.
В будущем они планируют усовершенствовать эту систему отслеживания движения, чтобы она могла отслеживать роботов в режиме реального времени. Команда работает над внедрением управляющих сигналов, чтобы роботы могли включать и выключать свет во время полета и общаться как настоящие светлячки. Они также изучают, как электролюминесценция может даже улучшить некоторые свойства этих мягких искусственных мышц, говорит Кевин Чен.
«Эта работа действительно интересна, потому что она минимизирует накладные расходы (вес и мощность) для генерации света без ущерба для летных характеристик», — говорит Каушик Джаярам, доцент кафедры машиностроения Университета Колорадо в Боулдере, который не был связанных с этим исследованием. «Генерация вспышки, синхронизированная с движением крыльев, продемонстрированная в этой работе, упростит отслеживание движения и управление полетом нескольких микророботов в условиях низкой освещенности как в помещении, так и на открытом воздухе»..jpg)
«Хотя производство света, воспоминания о биологических светлячках и потенциальное использование коммуникации, представленные в этой работе, чрезвычайно интересны, я считаю, что истинный импульс заключается в том, что эта последняя разработка может оказаться важной вехой на пути к демонстрации этих роботы вне контролируемых лабораторных условий», — добавляет Пакпонг Чирараттананон, доцент кафедры биомедицинской инженерии Городского университета Гонконга, который также не участвовал в этой работе. «Приводы с подсветкой потенциально действуют как активные маркеры для внешних камер, обеспечивая обратную связь в реальном времени для стабилизации полета, чтобы заменить текущую систему захвата движения. Электролюминесценция позволит использовать менее сложное оборудование и отслеживать роботов на расстоянии, возможно, с помощью другого более крупного мобильного робота для развертывания в реальных условиях. Это было бы значительным прорывом. Я был бы очень рад увидеть, что авторы добьются дальше».
Работа выполнена при поддержке Исследовательской лаборатории электроники Массачусетского технологического института.
Робот размером с насекомое, который может летать, ходить и дрейфовать на поверхности воды
Ингрид Фаделли, Science X Network, Tech Xplore
RoboFly, робот размером с насекомое, созданный исследователями. Предоставлено: Chukewad et al.
Роботы размером с насекомое могут иметь множество полезных применений, например, помощь в поисково-спасательных операциях (SAR), упрощение осмотра инфраструктуры и ускорение сельскохозяйственных процессов. Несмотря на преимущества, связанные с их размером, этих роботов может быть очень сложно построить, поскольку их изготовление включает в себя сборку нескольких крошечных компонентов.
Чтобы преодолеть эти ограничения, исследователи из Вашингтонского университета недавно создали RoboFly, робота с машущими крыльями массой 74 мг, который может двигаться в воздухе, на земле и на поверхности воды. Новый робот, представленный в статье, предварительно опубликованной на arXiv, был построен с использованием меньшего количества компонентов, чем те, которые обычно используются для создания роботов размером с насекомое, что значительно упрощает его изготовление.
Новый робот, представленный в статье, предварительно опубликованной на arXiv, был построен с использованием меньшего количества компонентов, чем те, которые обычно используются для создания роботов размером с насекомое, что значительно упрощает его изготовление.
«RoboFly — это микроробот с машущими крыльями, вдохновленный летающими насекомыми», — сказал TechXplore Йогеш Чукевад, один из исследователей, проводивших исследование. «Эти насекомые могут летать, ходить, а некоторые из них также могут скользить по поверхности воды. Целью нашего исследования было разработать робота, который имитирует своего биологического аналога, выполняя мультимодальные движения, в том числе воздушные, наземные и водные. поверхностное движение».
Крошечный робот, созданный Чукевадом и его коллегами, является адаптацией RoboBee, прототипа летающего микроробота, который Сойер Фуллер, старший автор и главный исследователь исследования, помогал разрабатывать в Гарвардском университете, прежде чем он начал работать в Университете США. Вашингтон. Ключевым улучшением RoboFly является то, что в нем меньше компонентов, поскольку исследователи обнаружили, что сборка слишком большого количества деталей делает его изготовление чрезмерно сложным.
Вашингтон. Ключевым улучшением RoboFly является то, что в нем меньше компонентов, поскольку исследователи обнаружили, что сборка слишком большого количества деталей делает его изготовление чрезмерно сложным.
«Способ проектирования RoboBee усложнил его сборку, — объяснил Чукевад. «В настоящее время большинство роботов размером с насекомое изготавливаются под микроскопом и тщательно собираются вручную, поскольку они состоят из множества отдельных микроскопических частей. Если вы случайно уроните деталь размером с кунжутное семя в переполненной лаборатории, вы никогда не увидеть его снова!»
Чтобы упростить изготовление RoboFly, исследователи создали новую конструкцию, в которой шасси робота состоит из одного сложенного листа ламината. Таким образом, можно построить робота, не собирая множество микроскопических деталей. Шасси также ниже и, следовательно, ближе к земле, что позволяет использовать три различных типа передвижения.
«RoboFly использует свои два машущих крыла, приводимых в движение пьезоэлектрическими приводами, чтобы летать и парить, как это делают некоторые насекомые», — сказал Чукевад. «Он также может двигаться и управлять по земле, используя тот же набор машущих крыльев. Из-за своего легкого веса, если его модифицировать с помощью набора из трех похожих на ноги придатков, он может приземляться на водную поверхность. После приземления Затем робот может двигаться и управлять по воде, используя тот же принцип, что и для движения по земле».
«Он также может двигаться и управлять по земле, используя тот же набор машущих крыльев. Из-за своего легкого веса, если его модифицировать с помощью набора из трех похожих на ноги придатков, он может приземляться на водную поверхность. После приземления Затем робот может двигаться и управлять по воде, используя тот же принцип, что и для движения по земле».
Тот факт, что он может летать, ходить и дрейфовать по воде, делает RoboFly уникальным, выделяя его среди других роботов размером с насекомое. Робот может быть намного эффективнее существующих в избегании препятствий, поскольку он может просто переключаться на другой режим передвижения (например, летать или двигаться по воде, если обнаруживает препятствия на земле).
В случае коммерциализации RoboFly может иметь несколько потенциальных применений, например, помощь людям в обнаружении утечек газа или помощь добровольцам в поисково-спасательных миссиях. Его также можно использовать в больших количествах на поверхности воды для поиска загрязняющих веществ или утечек потенциально опасных жидкостей (например, топлива в результате авиакатастрофы).
«Теперь, когда мы установили, что RoboFly может выполнять мультимодальное передвижение, нашей следующей целью будет использование его в качестве инструмента для лучшего понимания поведения его биологических аналогов», — сказал Чукевад.
Узнайте больше
Первый беспроводный летающий робот-насекомое взлетает
Дополнительная информация:
RoboFly: робот размером с насекомое упрощенной конструкции, способный летать, передвигаться по земле и воде. arXiv: 2001.02320 [cs.RO]. arxiv.org/abs/2001.02320
wyss.harvard.edu/technology/ro … -летающие микророботы/
Предоставлено
Наука Х Сеть
© 2020 Наука Х Сеть
Цитата :
RoboFly: робот размером с насекомое, который может летать, ходить и дрейфовать на поверхности воды (2020, 29 января)
получено 4 октября 2022 г.
из https://techxplore.com/news/2020-01-robofly-insect-sized-robot-drift-surfaces.html
Этот документ защищен авторским правом. Помимо любой добросовестной сделки с целью частного изучения или исследования, никакие
часть может быть воспроизведена без письменного разрешения. Контент предоставляется только в ознакомительных целях.
Летающие насекомые и их роботы-имитаторы
Новостная статья
• Физика 13, 60
Десятилетия работы позволили исследователям разгадать некоторые тайны полета насекомых; теперь насекомоподобные роботы ведут к дополнительным открытиям.
К. Ма и П. Чирараттананон/Harvard Univ.
Эти 80-миллиграммовые роботы, разработанные в 2013 году командой Роба Вуда из Гарварда, были одними из первых сантиметровых летательных аппаратов, имитирующих полет насекомых. Они получают питание и команды полета через трос. Более поздние версии этих роботов более автономны. Эти 80-миллиграммовые роботы, разработанные в 2013 году командой Роба Вуда в Гарварде, были одними из первых летательных аппаратов сантиметрового размера, которые имитировали полет насекомых. Они получают питание и команды полета через трос. Более свежие версии этих роботов более… Показать еще
К. Ма и П. Чирараттананон/Harvard Univ.
Эти 80-миллиграммовые роботы, разработанные в 2013 году командой Роба Вуда в Гарварде, были одними из первых летательных аппаратов сантиметрового размера, которые имитировали полет насекомых. Они получают питание и команды полета через трос. Более поздние версии этих роботов более автономны.
×
Несмотря на свой скромный вид, плодовая мушка — первоклассный летательный аппарат. Он может создавать подъемную силу с помощью крошечных крыльев, которые бросают вызов простым аэродинамическим законам. Мышцы его крыльев работают со скоростью 200 раз в секунду, что делает их одними из самых быстрых мышц на планете. И у него есть быстрая реакция на хищников (и раздраженных людей), которой мог бы позавидовать любой летчик-истребитель.
В течение многих лет биологи исследовали секреты полета плодовых мушек, а также пчел, комаров и мотыльков. Полет насекомых вызывает такой большой интерес, потому что он показывает торжество природы над очень сложной проблемой. «Летать просто сложно», — говорит биолог Майкл Дикинсон из Калифорнийского технологического института. «Полет действительно расширяет границы строения организма». Чтобы подняться в воздух, летающим животным нужны мощные и быстро реагирующие мышцы. Им также нужны быстрые визуальные системы и уникальные сенсорные возможности, такие как датчики вращения и рецепторы магнитного поля. «Летающие животные виртуозны во многих, многих вещах», — говорит Дикинсон.
Но одна вещь, в которой комары и мухи не хороши, это послушание. «Животных сложно заставить делать определенные вещи, — говорит инженер-биомеханик Ник Гравиш из Калифорнийского университета в Сан-Диего. «Если вы хотите проверить, как определенное движение крыла влияет на подъемную силу и сопротивление, вы не можете спрашивать животное». По этой причине исследователи часто обращались к роботизированным моделям насекомых. Самые ранние версии представляли собой простые конструкции крыльев, но сейчас инженеры создают автономные летательные аппараты. Эти роботы-жуки не совсем похожи на настоящих, но они позволяют по-новому взглянуть на то, как насекомые способны маневрировать и как они реагируют на столкновения.
Плавание по воздуху
Ранние попытки понять, как летают насекомые, закончились неудачно. Расчеты, проведенные более 80 лет назад, показали, что полет шмеля был невозможен, так как его крылья слишком малы, а скорость слишком мала, чтобы создать достаточную подъемную силу, чтобы удержать его пухлое тело в воздухе. Ошибка в этом рассуждении заключалась в том, что предполагалось, что аэродинамические принципы самолетов и птиц применимы к пчелам и мухам, хотя на самом деле насекомые используют совершенно уникальную стратегию полета.
F. T. Muijres и др. ., Science 344, 172 (2014)
Эта компьютерная модель, основанная на видео реальных мух, показывает, что их крылья двигаются вперед и назад, а не вверх и вниз.
Движение, которое используют насекомые, ближе к плаванию или ходьбе по воде, чем к тому, что мы обычно называем полетом. Вместо того, чтобы взмахивать крыльями вверх и вниз, как птицы, насекомые двигают крыльями вперед и назад. Во время движения вперед крылья наклоняются примерно на 45 ° по отношению к горизонтали, тем самым толкая воздух вниз, который оказывает восходящую силу или подъемную силу на насекомое. Во время обратного хода крылья переворачиваются на 135°, так что они продолжают давить на воздух и создавать подъемную силу.
Для самолета большой наклон крыла или «угол атаки» является катастрофическим: слишком крутое задирание носа приводит к внезапной потере подъемной силы и быстрому падению, что называется аэродинамическим сваливанием. Ключевые идеи, объясняющие, почему насекомые не останавливаются, пришли в 1990-х годах из роботизированных изображений насекомых, таких как Robofly из лаборатории Дикинсона [1] и Flapper, созданный Чарли Эллингтоном из Кембриджского университета в Великобритании [2]. Эти механические модели были намного больше, чем настоящие насекомые, но исследователи использовали уловки, чтобы воспроизвести условия полета насекомых. Например, Robofly работал на минеральном масле, которое имитировало липкий поток воздуха, испытываемый маленьким жуком. Команды также взмахивали крыльями робота медленнее, что облегчало визуализацию движения жидкости.
Г. Лаудер, Nature 412, 688 (2001)
Это Robofly, который Дикинсон и его коллеги использовали для выявления сил жидкости, действующих на крылья насекомых.
Г. Лаудер, Nature 412, 688 (2001)
Это Robofly, который Дикинсон и его коллеги использовали для обнаружения сил жидкости, воздействующих на крылья насекомых.
×
Эксперименты с роботами выявили крошечные вихри, называемые вихрями передней кромки, которые создают отрицательное давление, которое «засасывает» крыло вверх, чтобы избежать сваливания. Кроме того, исследователи смогли измерить силы, действующие на крылья, что помогло им понять, как насекомые могут летать в разных направлениях, просто изменяя свое поведение. «Роботы сыграли огромную роль в изучении аэродинамики летающих насекомых», — говорит биолог Флориан Муйрес из Вагенингенского университета в Нидерландах.
Эта ранняя работа робота помогла объяснить, почему насекомые приспособились к своей уникальной стратегии полета. Птичьи взмахи — вверх и вниз под малым углом атаки — могли бы создать достаточную подъемную силу для насекомого сантиметрового размера, только если бы оно махало крыльями очень быстро. Однако шмели уже взмахивают 250 раз в секунду. Комары взмахивают крыльями 600 раз в секунду. «Насекомые достигли предела скорости взмаха крыльев», — говорит Дикинсон. Они компенсируют этот предел взмахов, наклоняя крылья под большим углом атаки, что обеспечивает большую подъемную силу, чем могут создать птицы. Обратной стороной этого большого наклона является большее сопротивление воздуха или сопротивление. На самом деле насекомые застревают с аэродинамическим качеством всего около единицы, что примерно в 10 раз меньше, чем у птиц, и в 100 раз меньше, чем у самолетов. «Насекомые смехотворно неэффективны с точки зрения летающих устройств, — говорит Дикинсон. «Как следствие, они просто сжигают топливо, из-за чего постоянно голодают».
Г. Лаудер, Nature 412, 688 (2001)
Так называемый вихрь передней кромки образуется в результате закручивания воздушного потока над передним краем крыла насекомого. Низкое давление в ядре вихря увеличивает подъемную силу. (Красные стрелки указывают на то, что воздух выталкивается вниз за счет движения крыла.)
G. Lauder, Nature 412, 688 (2001)
Так называемый вихрь передней кромки образуется в результате закручивания воздушного потока над передним краем крыла насекомого. Низкое давление в ядре вихря увеличивает подъемную силу. (Красные стрелки указывают на то, что воздух нагнетается вниз за счет движения крыла.)
×
Мимикрия мух
К началу 2000-х годов появилось базовое представление о полете насекомых, и инженеры начали переписывать записи биологов, чтобы посмотреть, могут ли они использовать некоторые приемы насекомых, чтобы помочь им построить летающих роботов сантиметрового размера. Можно задаться вопросом, является ли имитация насекомых лучшим вариантом, учитывая их неэффективность. Разве вертолетоподобный вращающийся пропеллер не был бы лучше для летательного аппарата сантиметрового масштаба? «Оказывается, что, как и животные, крошечные роботы обязаны тому, как меняется физика в зависимости от масштаба», — говорит инженер-робототехник Сойер Фуллер из Вашингтонского университета (UW) в Сиэтле. Вращающиеся электродвигатели отлично подходят для больших роботов, но по мере того, как они уменьшаются в размерах, они становятся менее эффективными из-за вращательного трения в подшипниках и тепловых потерь в магнитных катушках. Поэтому Фуллер и другие робототехники исследовали использование пьезоэлектрических приводов, создающих возвратно-поступательную силу, аналогичную хлопающему действию насекомых.
«Я не уверен, что кто-то уверен в том, что хлопающие крылья, похожие на мухи, — лучшая или наиболее эффективная морфология для маленького летающего робота, — говорит Фуллер. «Просто инженеры должны признать, что наши возможности воображения ограничены, поэтому имеет смысл начать с имитации биологии».
М. Стоун/Унив. Вашингтон
Отвязанная роботизированная муха от группы Сойера Фуллера из Вашингтонского университета. Чтобы привести робота в действие, команда направляет лазерный луч на фотогальванический элемент, торчащий из головы мухи.
М. Стоун/Унив. Вашингтон
Непривязанная роботизированная муха от группы Сойера Фуллера из Вашингтонского университета. Чтобы привести робота в действие, команда направляет лазерный луч на фотогальванический элемент, торчащий из головы мухи.
×
В 2013 году Фуллер и другие коллеги из группы Роба Вуда из Гарвардского университета выпустили первого Robobee — машущего робота с размахом крыльев 3 сантиметра [3]. Эта 80-миллиграммовая машина могла зависать в течение 7 секунд и выполнять управляемые полетные движения. Однако, поскольку батареи тяжелые, для питания требовался трос. У него также не было «мозгов» на борту, так как все команды зондирования и полета выполнялись внешними системами.
Но многие новые роботы из Гарварда и других групп не привязаны и могут нести некоторые датчики и простые электронные контроллеры. Например, команда Фуллера из Университета Вашингтона недавно построила 100-миллиграммового свободнолетающего робота, оснащенного небольшим микропроцессором для управления взмахами его мухоподобных крыльев [4]. Исследователи предполагают, что стаи этих маленьких ботов однажды смогут искать выживших в рухнувших зданиях, следить за подозреваемыми в совершении преступлений или вынюхивать утечки газа.
«Роботы постоянно совершенствуются, — говорит физик Итай Коэн из Корнельского университета. Он считает, что успехи роботов демонстрируют точность моделей полета насекомых. И в форме «перекрестного опыления» роботы дают новое представление о том, как насекомые могут так хорошо летать.
Маневры уклонения спецназа
Одна из областей, где роботы помогают биологам, — это маневренность насекомых. В отличие от птиц, у насекомых нет хвоста для управления. Вместо этого они маневрируют, слегка регулируя движение своего крыла. Например, уменьшая длину движения крыльев вперед и назад, жук может контролировать свой шаг, то есть наклон тела относительно горизонтали.
Вместе со своими коллегами из Делфтского технологического университета в Нидерландах Муйрес исследовал маневренность насекомых, используя бесхвостого свободнолетающего робота DelFly Nimble [5]. Этот робот не похож на плодовую мушку — он в 55 раз больше и имеет четыре крыла, а не два, — но его можно запрограммировать на маневры уклонения, как у плодовой мушки. «Плодовые мушки делают эти очень быстрые повороты, чтобы избежать опасности», — говорит Муйрес. Более ранние наблюдения за реальными мухами показали, что эти повороты производятся с изменением только крена (крена) и тангажа, но не вращения в горизонтальной плоскости, называемого рысканием.
М. Карасек/Т. У. Делфт
DelFly — это летающий робот, разработанный исследователями Делфтского технологического университета в Нидерландах. Он крупнее настоящего насекомого, но более автономен, чем роботы размером с насекомое. Исследователи показали, что он будет выполнять виражи, как настоящие мухи (см. видео). DelFly — это летающий робот, разработанный исследователями из Делфтского технологического университета в Нидерландах. Он крупнее настоящего насекомого, но более автономен, чем роботы размером с насекомое. Исследователи показали, что он будет совершать повороты накрен… Показать еще
М. Карасек/Т. У. Делфт
DelFly — это летающий робот, разработанный исследователями Делфтского технологического университета в Нидерландах. Он крупнее настоящего насекомого, но более автономен, чем роботы размером с насекомое. Исследователи показали, что он будет выполнять виражи, как настоящие мухи (см. видео).
×
Чтобы проверить эту гипотезу, Муйрес и его коллеги отключили управление рысканьем в DelFly во время быстрых маневров. Удивительно, но они обнаружили, что DelFly автоматически отклоняется от курса, чтобы лететь прямо. «Оказывается, существует аэродинамический соединительный механизм, с помощью которого, если вы создаете нужное количество крутящего момента по крену и тангажу, этот механизм поворачивает ваш нос в направлении полета», — говорит Муйрес. Тот же механизм, по-видимому, работает и у мух. «Мы, вероятно, не нашли бы этот механизм без DelFly», — говорит он.
Вдохновение наоборот
Как и в исследовании DelFly, в другой работе используются роботы для получения биологических знаний. По словам Гравиша, одной из современных тенденций является разработка более чувствительных роботов для изучения «эмерджентного поведения». На практике это означает контроль одного параметра, например, частоты взмахов крыльев, позволяя другим параметрам, таким как угол наклона крыльев, свободно реагировать на силы окружающей среды. Наличие таких чувствительных роботов позволяет исследователям изучать механизмы обратной связи, которые контролируют поведение насекомых в полете.
Т. У. Делфт
DelFly выполняет быстрый вираж, вдохновленный маневрами настоящей мухи.
В качестве примера биологии, вдохновленной робототехникой, Гравиш приводит недавнее исследование, в котором изучалось, что заставляет насекомых лететь прямо, когда они натыкаются на препятствие, такое как окно или другое насекомое [6]. «Какая часть этой стабилизации осуществляется мозгом, а какая заложена в механической реакции тела?» — спрашивает Гравиш. Чтобы исследовать этот вопрос, исследователи поместили гибкие элементы в крыло робота и показали, что пассивная реакция крыльев способна противостоять возмущениям; сила ума не нужна.
Дикинсон менее убежден в том, что свободно летающие роботы помогут понять биологию. «Я думаю, что связь между летающими роботами и насекомыми довольно поверхностна, — говорит он. Инженеры пытаются заставить маленькую машину летать, но они не используют мышцы или нейроны, поэтому параметры у всех разные. Он считает, что компьютерное моделирование может приблизиться к воспроизведению того, что происходит при полете насекомых.
Гравиш соглашается с тем, что компьютерное моделирование очень эффективно. Но его философия заключается в том, что вы получаете более интуитивное понимание проблемы, создавая механические модели и наблюдая, как они работают сами по себе. Он также признает, что инженеры все еще далеки от создания крошечного робота, способного летать самостоятельно дольше нескольких секунд. «Это дает вам большое представление о насекомых и о том, насколько легко они выглядят», — говорит Гравиш.
– Майкл Ширбер
Майкл Ширбер является ответственным редактором Physics из Лиона, Франция.
Ссылки
- Дж. М. Берч и М. Х. Дикинсон, «Поток по размаху и присоединение вихря передней кромки к крыльям насекомых», Nature 412 , 729 (2001).
- С. П. Эллингтон и др. , «Вихри переднего края в полете насекомых», Nature 384 , 626 (1996).
- К.Ю. Ма и др. , «Управляемый полет биологически вдохновленного робота размером с насекомое», Наука 340 , 603 (2013).
- Дж. Джеймс и др. , «Взлет летательного аппарата с лазерным двигателем массой 190 мг: самый легкий беспроводной робот для полета», Международная конференция IEEE по робототехнике и автоматизации (ICRA), 2018 г. (2018 г.).
- М. Карасек и др. , «Бесхвостый воздушный робот-заслонка показывает, что мухи используют муфту крутящего момента при быстрых поворотах», Science 361 , 1089 (2018).
- Ю. Чен и др. , «Управляемый полет микроробота, приводимого в движение мягкими искусственными мышцами», Nature 575 , 324 (2019).
Области субъекта
Жидкости динамика Биологическая физика
Недавние статьи
Динамика жидкости
Стабильность в рецидивистской жидкости
Гидродинамика
Почему мотыльки не такие быстрые
Во время полета бражникам необходимо деликатно балансировать подъемную силу и сопротивление таким образом, чтобы ограничить их максимальную скорость, согласно моделированию. Подробнее »
Нелинейная динамика
Победа Шредингера для экстремальных волн
Исследователи создают самые реалистичные на сегодняшний день волны-убийцы, демонстрируя динамику, которая соответствует ожидаемой для экстремальных волн в более идеализированных системах. Подробнее »
Еще статьи
Студенческий проект: Создание робота-насекомого
Опишите камни как ученый НАСА
Собери вездеход и многое другое с фигурами
Перейти к руководству для преподавателей
Когда инженеры НАСА проектируют роботов для экстремальных условий, они часто черпают вдохновение у насекомых! В этом задании вы обдумаете уникальные характеристики насекомых, такие как их крылья или усики, и нарисуете конструкцию насекомого-робота, способного справиться с уникальными задачами окружающей среды.
Материалы
Бумага
Ручки/карандаши или маркеры
(дополнительно) Рабочий лист робота-насекомого – Скачать PDF
1. Узнайте о насекомых и их строении
Что такое насекомое? Каковы его особенности и что они ему помогают? Узнайте, почему насекомые, которых мы видим вокруг себя каждый день, имеют разные особенности и какие функции выполняют эти функции. Тело насекомых состоит из трех основных частей:
- Голова с глазами, ртом и усиками
- Грудная клетка с ногами и/или крыльями
- Брюшко, содержащее их органы
Узнайте о других структурах насекомых и их назначении в таблице ниже.
Структура насекомых
| Структура | .Три пары ног (6 ног) | Локомоция/Движение |
| Обнаружение зрения и движения |
+ Развернуть изображение
2. Узнайте, как насекомые и природа могут вдохновить на создание роботов
Наши пять чувств — зрение, обоняние, вкус, осязание и слух — предоставляют информацию об окружающем нас мире. Как робот может собирать информацию таким же образом, чтобы изучать среду, которую мы не можем посетить лично? Инженеры Лаборатории реактивного движения НАСА, или JPL, часто черпают вдохновение в природе при создании роботов. Некоторые из этих роботов даже летают в космос! Вот несколько примеров роботов, созданных в Лаборатории реактивного движения и НАСА и вдохновленных природой:
Роботы, вдохновленные природой
ЛЕМУР
Может взбираться по каменным стенам, цепляясь сотнями крошечных рыболовных крючков в каждом из 16 пальцев. Использует искусственный интеллект (ИИ), чтобы обойти препятствия.
› Подробнее
SpiderBot
Микроробот, предназначенный для картографирования местности на других планетах и исследования более мелких тел, таких как кометы, астероиды или Луна.
› Подробнее
A-PUFFER
Складные роботы, которые могут исследовать области на Луне и собирать информацию о местах, которые астронавтам может быть трудно исследовать пешком, например, о труднодоступных кратерах и узких пещерах.
› Читать далее
ВОРОБЕЙ
Передвигается на пару и прыгает по ледяной местности, такой как на спутнике Юпитера Европе и спутнике Сатурна Энцеладе.
› Подробнее
Geckobot
Система захвата, напоминающая крошечные волоски на нижней части лап геккона, позволяет этому роботу цепляться за вертикальные стены и другие поверхности.
› Подробнее
BRUIE
Этот робот, предназначенный для подводных исследований внеземных ледяных вод, использует свои два колеса, чтобы катиться по нижней стороне льдин, покрывающих водоемы.
› Читать дальше
RoboSimian
Обезьяноподобный робот, способный реагировать на сценарии стихийных бедствий, слишком опасные для человека.
› Подробнее
Рои
Эта группа роботов вдохновлена тем, как муравьи работают вместе, чтобы обмениваться информацией.
› Подробнее
3. Создай собственного робота-насекомого
Теперь твоя очередь! На листе бумаги нарисуйте робота-насекомого, способного противостоять марсианской среде. Проявите творческий подход, но не забудьте включить функции, которые позволят вашему роботу добиться успеха на Марсе. Ваше роботизированное насекомое должно иметь свойства и функции, которые позволят ему исследовать место, которое:
- Холодно, но много солнечного света.
- Множество камней, которые могут выступать в качестве препятствий, которые ваш робот должен разбить на части или объехать.
- Некоторые холмы и долины.
- Пыльно и ветрено. Иногда бывают пыльные бури.
- Дальние поездки. Много открытого пространства.
Узнайте больше о Марсе по приведенным ниже ссылкам, чтобы увидеть, что еще вы можете добавить к своему роботу-насекомому:
- Марс в минутной серии видеороликов
- Прочтите все о Марсе
- Марс в фактах и цифрах
- NASA Mars Missions
Об изображении: Этот коллаж из изображений Марса, сделанных космическим кораблем НАСА, показывает (против часовой стрелки сверху):
- Фрагмент панорамы, сделанной марсоходом Curiosity на Марсе. Изображение предоставлено: NASA/JPL-Caltech/MSSS › Полное изображение и подпись
- Снимок, сделанный в 1979 году посадочным модулем «Викинг-2», на котором виден тонкий иней, окружающий посадочный модуль на Марсе. Изображение предоставлено: НАСА/Лаборатория реактивного движения-Калтех › Полное изображение и подпись
- Пылевой вихрь высотой 19 миль кружится над равнинами Марса на снимке, сделанном Марсианским разведывательным орбитальным аппаратом. Изображение предоставлено: NASA/JPL-Caltech/UA › Полное изображение и подпись
+ Развернуть изображение
4. Подумайте о своей конструкции
Как вы думаете, сработает ли ваша конструкция на Марсе и почему? Что бы вы могли изменить, если бы вместо этого проектировали робота для Земли?
Если ваши исследования показывают, что на Марсе бывают большие пыльные бури, которые могут столкнуться с роботами, работающими на солнечных батареях, или что камни в некоторых местах невероятно острые и могут серьезно повредить колеса вашего робота-насекомого (если они у него есть), не могли бы вы вернуться и что-то изменить?
Является ли природа хорошим источником вдохновения для создания космических кораблей и роботов?
Об изображении: Острые камни на Марсе повреждают колеса марсохода Curiosity. На этом снимке, сделанном марсоходом на Марсе в 2016 году, вы можете увидеть дыры и другие повреждения пары колес. После того, как инженеры НАСА заметили, что колеса Curiosity повреждаются, они изменили конструкцию колес, которые будут использоваться на следующем марсоходе. Марсоход Perseverance, чтобы сделать их крепче. › Узнайте больше о новом дизайне колес. Изображение предоставлено: NASA/JPL-Caltech/MSSS | + Развернуть изображение
5. Запишите свои выводы
В рабочем листе робота-насекомого или на листе бумаги запишите следующую информацию о вашем роботе-насекомом:
- Имя вашего робота
- Особенности/структуры, которые вы включили в свой проект
- Функции/ Возможности вашего дизайна
- Элементы окружающей среды, для которых вы его разработали, и почему вы выбрали именно эти особенности
- Как ваш дизайн будет вести себя на Марсе? Удастся ли это?
- Вы бы вернулись и что-то изменили и почему?
- Как процесс проектирования вашего робота-насекомого имитировал процесс проектирования, который инженеры НАСА используют для создания роботов.
6. Объясните и сравните свою конструкцию
Если возможно, сравните своего робота-насекомого с насекомым, сделанным другом или членом семьи. По очереди объясняйте свои конструкции роботов-насекомых. Обсудите, что сработало лучше в том или ином дизайне и почему. Если бы вы могли объединить дизайны в суперроботизированное насекомое, что бы вы оставили, а что исключили?
EarthMarsMissionsRoboticsLifeDesign Your SpacecraftOcean WorldsQuick and EasyRoversSpacecraft
Materials
1. Узнайте о насекомых и их строении
2. Узнайте, как насекомые и природа могут вдохновить на разработку роботов
3. Создайте собственного робота-насекомого
9000 Подумайте над своим дизайном 5. Запишите свои выводы
6. Объясните и сравните свой дизайн
исследователей представили новое поколение крошечных маневренных дронов
ТЕМЫ: ДроныЭлектротехникаMITRobotics
Дэниел Акерман, Массачусетский технологический институт
1 марта 2021 г.
Замечательные акробатические способности насекомых помогают им ориентироваться в воздушном мире со всеми его порывами ветра, препятствиями и общей неопределенностью. Такие черты также трудно встроить в летающих роботов, но доцент Массачусетского технологического института Кевин Юфэн Чен создал систему, которая приближается к ловкости насекомых. Предоставлено: Кевин Юфэн Чен
Эта технология может расширить репертуар воздушных роботов, позволяя им работать в стесненных условиях и выдерживать столкновения.
Если вам когда-нибудь приходилось отмахиваться от комара, чтобы тот возвращался снова (и снова, и снова), вы знаете, что насекомые могут быть удивительно акробатичными и выносливыми в полете. Эти черты помогают им ориентироваться в воздушном мире со всеми его порывами ветра, препятствиями и общей неопределенностью. Такие черты также трудно встроить в летающих роботов, но MIT
MIT — это аббревиатура от Массачусетского технологического института. Это престижный частный исследовательский университет в Кембридже, штат Массачусетс, основанный в 1861 году. Он состоит из пяти школ: архитектуры и планирования; инженерия; гуманитарные науки, искусство и социальные науки; управление; и наука. Влияние Массачусетского технологического института включает в себя множество научных прорывов и технологических достижений. Их заявленная цель — сделать мир лучше с помощью образования, исследований и инноваций.
» data-gt-translate-attributes='[{«attribute»:»data-cmtooltip», «format»:»html»}]’>Ассистент профессора Массачусетского технологического института Кевин Юфэн Чен построил систему, которая приближается к ловкости насекомых.
Чен, сотрудник Департамента электротехники и компьютерных наук и Исследовательской лаборатории электроники, разработал беспилотных летательных аппаратов размером с насекомое с беспрецедентной ловкостью и устойчивостью. Воздушные роботы приводятся в действие новым классом мягких приводов, что позволяет им выдерживать физические нагрузки реального полета. Чен надеется, что когда-нибудь роботы смогут помогать людям, опыляя посевы или осматривая машины в стесненных условиях.
Работа Чена появится в этом месяце в журнале Транзакции IEEE по робототехнике . Среди его соавторов — аспирант Массачусетского технологического института Чжицзян Рен, аспирант Гарвардского университета Сийи Сюй и специалист по робототехнике Городского университета Гонконга Пакпонг Чирараттананон.
Как правило, дронам требуются широкие открытые пространства, потому что они недостаточно маневренны, чтобы перемещаться в ограниченном пространстве, и недостаточно прочны, чтобы противостоять столкновениям в толпе. «Если мы посмотрим на большинство современных дронов, то увидим, что они обычно довольно большие, — говорит Чен. «Большинство их приложений связаны с полетами на открытом воздухе. Вопрос в том, сможете ли вы создать роботов размером с насекомое, которые смогут перемещаться в очень сложных и загроможденных пространствах?»
По словам Чена, «задача создания маленьких воздушных роботов огромна». Дроны размером с пинту требуют принципиально иной конструкции, чем более крупные. Большие дроны обычно приводятся в движение двигателями, но двигатели теряют эффективность, когда вы их уменьшаете. Итак, говорит Чен, для насекомоподобных роботов «нужно искать альтернативы».
Основной альтернативой до сих пор было использование небольшого жесткого привода, изготовленного из пьезоэлектрических керамических материалов. Хотя пьезоэлектрическая керамика позволила первому поколению крошечных роботов подняться в воздух, они довольно хрупкие. И это проблема, когда вы строите робота, имитирующего насекомое — шмели, собирающие пищу, сталкиваются примерно раз в секунду.
Чен разработал более устойчивый крошечный дрон, используя мягкие приводы вместо жестких и хрупких. Мягкие приводы состоят из тонких резиновых цилиндров, покрытых углеродными нанотрубками. Когда к углеродным нанотрубкам прикладывается напряжение, они создают электростатическую силу, которая сжимает и удлиняет резиновый цилиндр. Повторяющееся удлинение и сжатие заставляет крылья дрона биться быстрее.
Приводы Чена могут взмахивать почти 500 раз в секунду, придавая дрону устойчивость, подобную насекомому. «Вы можете ударить его, когда он летит, и он сможет восстановиться», — говорит Чен. «Он также может выполнять агрессивные маневры, такие как сальто в воздухе». И весит всего 0,6 грамма, что примерно равно массе большого шмеля. Дрон немного похож на крошечную кассету с крыльями, хотя Чен работает над новым прототипом в форме стрекозы.
«Полет с роботом сантиметрового размера — это всегда впечатляющий подвиг, — говорит Фаррелл Хелблинг, доцент кафедры электротехники и вычислительной техники Корнельского университета, который не участвовал в исследовании. «Из-за присущей мягким приводам податливости робот может безопасно сталкиваться с препятствиями, не сильно препятствуя полету. Эта функция хорошо подходит для полетов в загроможденных, динамичных средах и может быть очень полезна для любого количества реальных приложений».
Хелблинг добавляет, что ключевым шагом к этим приложениям будет отвязка роботов от проводного источника питания, что в настоящее время требуется из-за высокого рабочего напряжения приводов. «Я рад видеть, как авторы уменьшат рабочее напряжение, чтобы однажды они могли достичь беспрепятственного полета в реальных условиях».
Создание насекомоподобных роботов может открыть окно в биологию и физику полета насекомых, давнее направление исследований для исследователей. Работа Чена решает эти вопросы с помощью своего рода реверс-инжиниринга. «Если вы хотите узнать, как летают насекомые, очень полезно построить модель робота в масштабе», — говорит он. «Вы можете возмутить несколько вещей и посмотреть, как это повлияет на кинематику или как изменятся силы жидкости. Это поможет вам понять, как эти штуки летают». Но Чен стремится сделать больше, чем пополнить учебники по энтомологии. Его дроны также могут быть полезны в промышленности и сельском хозяйстве.
Чен говорит, что его мини-аэраторы могут перемещаться по сложной технике, обеспечивая безопасность и функциональность. «Подумайте об осмотре газотурбинного двигателя. Вы бы хотели, чтобы дрон перемещался по [замкнутому пространству] с небольшой камерой, чтобы проверять наличие трещин на пластинах турбины».
Другие потенциальные области применения включают искусственное опыление сельскохозяйственных культур или выполнение поисково-спасательных операций после стихийного бедствия. «Все эти вещи могут быть очень сложными для существующих крупномасштабных роботов», — говорит Чен. Иногда больше не значит лучше.
Ссылка: «Устойчивые к столкновениям воздушные роботы с мягким приводом и чешуей насекомых с высокой маневренностью», авторы ЮФэн Чен, Сийи Сюй, Чжицзянь Рен и Пакпонг Чирараттананон, 18 февраля 2021 г., IEEE Transactions on Robotics .
DOI: 10.1109/TRO.2021.3053647
Эти 5 роботов были вдохновлены насекомыми
По оценкам, на каждого человека на планете приходится 200 миллионов насекомых. Эти ошибки играют различные и важные роли в вашей повседневной жизни.
[см. также]
Насекомые служат сложной и хрупкой экосистеме планеты, способствуя выживанию человечества. Помимо непостижимой популяции насекомых, в настоящее время в мире насчитывается около 900 тысяч видов насекомых, и некоторые ученые считают, что это число может быть намного больше.
Насекомые сами совершают великие подвиги в природе, способности, которым позавидуют даже некоторые из ваших любимых героев. На протяжении десятилетий ученые внимательно изучали жуков, учились у них и использовали эти исследования, чтобы сделать огромные шаги в робототехнике.
Роботы, вдохновленные насекомыми, могут выполнять работу, как большую, так и маленькую, которая может быть слишком сложной или слишком утомительной для людей. Вот пять роботов, вдохновленных насекомыми.
Муравьи/The r-one
Источник: Rice University
Муравьи — одни из самых интересных насекомых на планете. Один отдельный муравей не может сделать многого, однако колония муравьев может совершать удивительные подвиги. Ученые и инженеры изучают, что муравьи могут поднимать 10-50 В раз больше собственного веса, умеют плавать и обладают удивительной способностью координировать свои действия для решения масштабных задач.

Впечатленный муравьями, Джеймс Макларкин из Массачусетского технологического института создал роботов, которые вели себя как они. При весе около одиннадцати унций и примерно четырех дюймов в диаметре, а также двух дюймов в высоту, его насекомые имеют небольшие внутренние компьютеры, которые позволяют роботам общаться друг с другом, подобно колонии муравьев.
Эти вдохновленные муравьями роботы, способные двигаться со скоростью десять дюймов в секунду, были созданы с целью разведки, поиска и спасения, восстановления, картографирования и наблюдения. Робот, ищущий хоккейную шайбу (сейчас находится в Университете Райса), может быть использован для решения любых задач — от поиска выживших после землетрясения до исследования поверхности Марса.
Пчелы/RoboBees
Источник: Harvard
Как и что-то из «Черного зеркала», RoboBee вдохновлен тем, что следует из названия, пчелами. Насекомое, созданное Робертом Вудом из Гарвардской лаборатории микробиотики, является самым маленьким роботом в мире, весом двести унций, размахом крыльев чуть более дюйма и ростом всего ⅔ дюймов в длину.
Оригинальный RoboBee. Источник: Harvard
Роботизированное насекомое включает в себя систему обработки изображений, вдохновленную тем, как пчелы обрабатывают изображения, делая снимки своими «глазами», или камеру с низким разрешением, делающую непрерывные снимки и пересылающую информацию в мозг RoboBee.
Самый популярный
Постоянно развиваясь, исследователи воображают день, когда рой его пчел можно будет использовать в чрезвычайных ситуациях для отправки информации. Роботы могут быть использованы для опыления сельскохозяйственных культур или садов.
Недавно робот научился нырять под воду, взмахивая крыльями. Технология RoboBees продолжает развиваться и становится все более продвинутой.

Тараканы-петуши/DASH
Источник: DASH
Тараканы плохо себя зарекомендовали, но они действительно одни из самых впечатляющих существ в природе. Эти насекомые могут задерживать дыхание на сорок минут, практически неуязвимы и могут бегать со скоростью до трех миль в час. Способность таракана быстро передвигаться по любой местности и добираться практически куда угодно делает его источником вдохновения для любого робототехника.
Источник: DASH
Исследователи Калифорнийского университета создали собственное насекомое, вдохновленное тараканами, Dynamic Autonomous Sprawled Hexapod, или DASH. Этот шестиногий RoboRoach имеет четыре дюйма в длину и два дюйма в ширину. Благодаря своей шестипедальной конструкции робот может стабильно перемещаться по нескольким поверхностям.
Со временем робот DASH развивался, и исследователи добавляли новые функции. DASH был модифицирован сменными ножками с когтями или магнитами, позволяющими таракану-роботу карабкаться вертикально. Недавно роботу дали крылья и возможность летать со скоростью четыре фута в секунду.

Робот DASH можно использовать для выполнения работ, которые могут быть слишком опасными для людей, таких как проверка на наличие взрывчатых веществ, осмотр загрязненных территорий или даже осмотр мостов.
Термиты/TERMES
Источник: Гарвард
Термиты могут напугать вас или побеспокоить вас из-за своей разрушительной способности. Однако термиты — мастера-строители. Термиты длиной в дюйм могут строить насыпи высотой до сорока футов.
Вдохновившись этим, компьютерщик из Гарварда Радхика Нагпал и ее коллеги использовали свои навыки и ресурсы для создания искусственных термитов, которые могут строить структуры намного больше, чем они сами.
Названные проектом TERMES, семидюймовые роботы могут схватить небольшой кирпич и перевернуть его на спину, а затем положить в нужное место. Всего с одним роботом-насекомым команда смогла построить небольшую лестницу из десяти кирпичей и лестницу из восьмидесяти кирпичей с помощью трех роботов. Каждый робот может быть запрограммирован на коллективную или индивидуальную работу для выполнения проектов строительства или укрепления.
Многоножки/Робо-многоножки
Источник: IEEE
Многоножки могут удивительно хорошо передвигаться по любой местности. Построенный с помощью аналогичного процесса, используемого для изготовления компьютерных чипов, инженер Карл Берингер и его исследовательская группа из Вашингтонского университета создали робота, который движется как многоножка. Всего один дюйм в длину и ⅓ дюйма в ширину, у робота 512 ног.
Впечатляет, что робот может нести в семь раз больше своего веса, а в конечном итоге в пятьдесят раз больше собственного веса. Хотя роботизированное насекомое может быть не таким быстрым, как вдохновленная им многоножка, Берингер стремится улучшить его мобильность.
Возможности использования робота безграничны, и он играет важную роль в исследовании космоса и планет.
Будущее — это биомимикрия
Будет интересно посмотреть, какие новые технологии появятся в природе и какие новые виды насекомых откроют ученые.

Важно отметить, что биомимикрия, или имитация моделей, систем и элементов природы с целью решения сложных человеческих проблем, будет играть огромную роль в том, как продукты и даже услуги будут лучше разрабатываться. соответствуют человеческому опыту.
Каких крутых роботов, вдохновленных природой, вы видели в последнее время? Оставляйте свои примеры в комментариях ниже.
Еще новости
инновации
Компания Razer представила новую маску.