Содержание
Как создаются роботы, способные пройти там же, где и мы / Хабр
Чтобы приносить пользу людям, роботам нужно научиться ходить так же, как мы
Роботы уже много десятилетий умеют ходить на двух ногах. Сегодня наиболее передовые гуманоидные роботы могут шагать по плоским и наклонным поверхностям, подниматься и спускаться по ступеням и пробираться по пересечённой местности. Некоторые даже умеют прыгать. Но, несмотря на этот прогресс, роботы с ногами до сих пор не могут сравниться по ловкости, эффективности и надёжности с людьми и животными.
Существующие шагающие роботы жрут энергию и слишком много времени тратят на тренировки. Слишком часто они отказывают и ломаются. Чтобы стать роботизированными помощниками, о которых мы так давно мечтали, эти машинам придётся научиться ходить так, как мы.
Нам обязательно нужно создать роботов с ногами, поскольку наш мир предназначен для ног. Мы проходим через узкие места, мы обходим препятствия, мы поднимаемся и спускаемся по ступенькам. Роботам на колёсах или гусеницах тяжело передвигаться в тех местах, которые мы приспособили для наших тел.
Роботам на колёсах или гусеницах тяжело передвигаться в тех местах, которые мы приспособили для наших тел.
И у многих гуманоидных роботов действительно есть ноги, выглядящие так же, как наши – с бёдрами, коленями, лодыжками и ступнями. Но на этом всё сходство заканчивается. Если, к примеру, сравнить силу, с которой робот давит на землю, с такой же у человека, выяснится, что часто они сильно отличаются. Большая часть гуманоидных роботов, происходящих от ранних примеров промышленных роботизированных захватов, контролируют конечности так, чтобы они точно двигались по заданным траекториям. Однако передвижение на двух ногах требует не столько контроля положения, сколько контроля силы, и подразумевает большой диапазон гибкости и эластичности – известной в робототехнике, как податливость [compliance] – позволяющий справляться с неожиданными контактами.
Многие исследовательские группы пытаются создавать менее жёстких роботов, способных двигаться более динамичным, человекоподобным образом.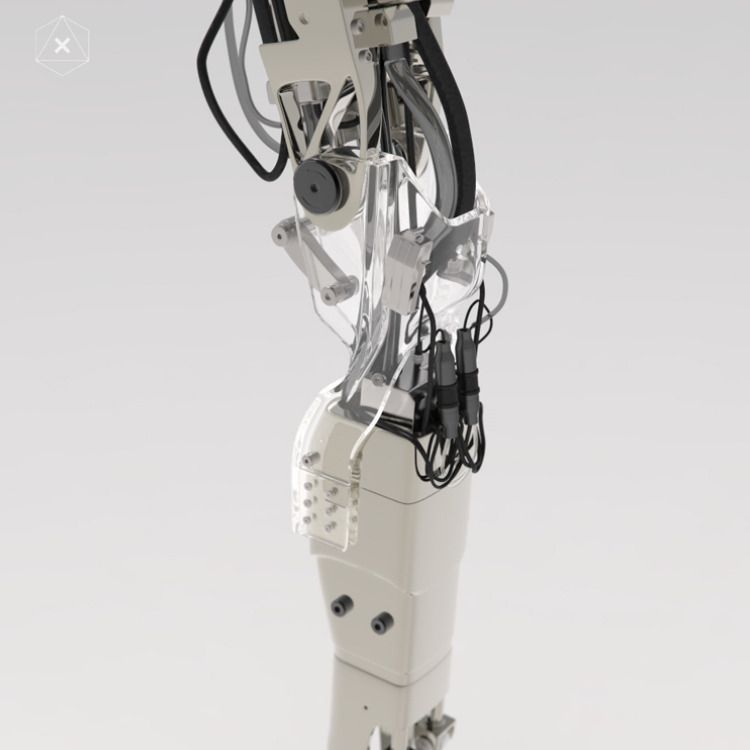 Наиболее известным среди таких проектов, наверное, будет Atlas от Boston Dynamics, гуманоид, способный бегать по жёсткой и мягкой почве, перепрыгивать через брёвна и даже делать сальто назад. Но опять-таки, сравнивая движение самых сложных роботов с животными, мы видим, что машины не дотягивают.
Наиболее известным среди таких проектов, наверное, будет Atlas от Boston Dynamics, гуманоид, способный бегать по жёсткой и мягкой почве, перепрыгивать через брёвна и даже делать сальто назад. Но опять-таки, сравнивая движение самых сложных роботов с животными, мы видим, что машины не дотягивают.
Чего же нам недостаёт? Технология – не самая большая проблема: моторы достаточно мощные, материалы достаточно прочные, компьютеры достаточно быстрые. Ограничением, видимо, служит наше понимание того, как работает ходьба.
Роботы Кэсси (слева) и Диджит от Agility Robotics
В Лаборатории динамической робототехники при Орегонском университете я руководил группой исследователей, пытавшихся разобраться в базовых принципах ходьбы и применить эти открытия к роботам. Я также сооснователь и технологический директор компании Agility Robotics, стартапа, находящегося в Олбани (Орегон), изучающего вопросы коммерческого использования ходящих роботов. В 2017 году мы открыли миру Кэсси, двуногую платформу, которую мы продали нескольким исследовательским группам.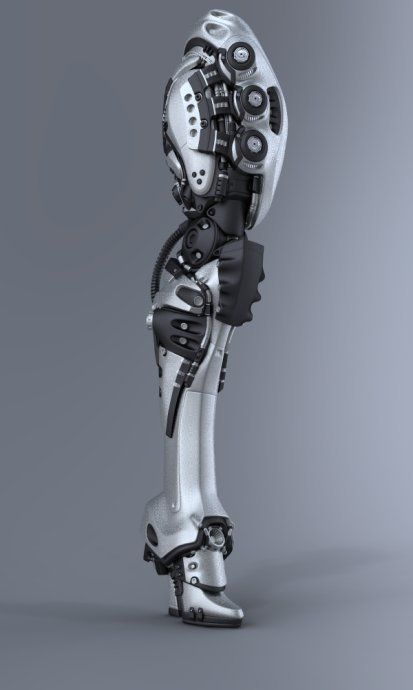 Вскоре наш новый робот сможет выйти в мир: у Диджита ноги похожи на ноги Кэсси, однако у него есть датчики и пара рук, которую он использует для стабилизации, а в будущем – и для манипуляций.
Вскоре наш новый робот сможет выйти в мир: у Диджита ноги похожи на ноги Кэсси, однако у него есть датчики и пара рук, которую он использует для стабилизации, а в будущем – и для манипуляций.
Как в лаборатории, так и в компании, мы работаем над созданием будущего, в котором роботы смогут пройти везде, где могут люди. Я считаю, что роботы с динамическими ногами когда-нибудь смогут помогать ухаживать за престарелыми людьми у них дома, участвовать в спасательных операциях при пожарах и землетрясениях, и доставлять посылки на дом. Роботы с ногами также позволят создать экзоскелеты и протезы, которые помогут увеличить мобильность людей с ограниченными возможностями. Они, наконец, привнесут в реальность роботов из научной фантастики.
Некоторые птицы бегают лучше, чем летают, или даже вообще не летают. Страусы, индейки, цесарки и перепела не могут парить, как ястреб, но быстро передвигаются пешком. Мы с коллегами из лаборатории и с Моникой Дэйли из Королевского ветеринарного колледжа при Лондонском университете провели бесчисленные часы за наблюдением шагающих и бегающих по лаборатории птиц. Мы хотим понять, как эти животные способны двигаться так проворно и эффективно – и ведь большая часть этих пернатых машин работает на семенах!
Мы хотим понять, как эти животные способны двигаться так проворно и эффективно – и ведь большая часть этих пернатых машин работает на семенах!
В одном эксперименте цесарка бежит по дорожке, а потом наступает на яму, замаскированную кусочком салфетки. Животное не знало, что наступит в яму глубиной примерно в половину длины ноги, однако оно не споткнулось, а его нога вытянулась и приспособилась к углублению на бегу. В данном процессе происходит нечто примечательное: мозгу птицы не нужно чувствовать и реагировать на возмущение, поскольку её ноги справляются с этим сами.
Это даёт важную идею для разработчиков роботов: если вы сначала создадите робота, а потом решите запрограммировать его на ловкие движения, у вас ничего не получится. Как в случае с цесаркой, ловкость робота по большей части будет происходить от механических свойств его тела, от того, что робототехники называют пассивной динамикой. И ею пренебрегают в большинстве проектов по разработке роботов с ногами. Тщательно разрабатывая пассивную динамику робота параллельно с программной начинкой, сводя их в интегрированную систему, вы увеличиваете шансы на появление робота, приближающегося по характеристикам к животному.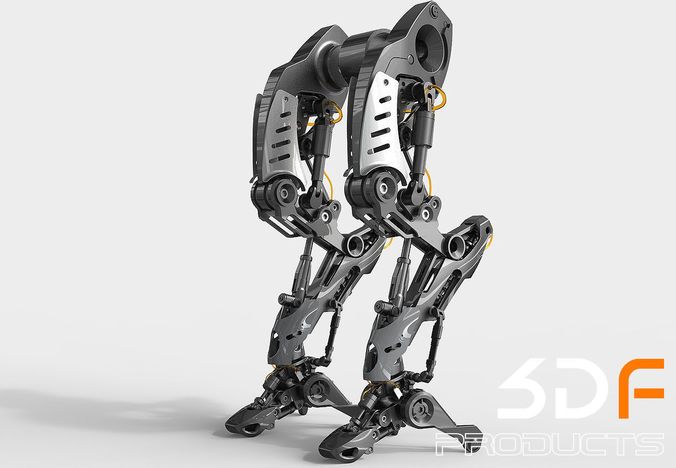
Стоит отметить, что, хотя мы и черпаем вдохновение у животных, мы не воспроизводим форму стопы птицы или конструкцию мускулов и костей в ноге человека. Мы хотим понять физику движения животных и вывести из неё абстрактную математическую модель, которую можно понять, проверить в компьютерных симуляциях, и воплотить в реальных роботах. Поскольку при создании роботов мы используем металл и электронику вместо костей и мозгов, они могут сильно отличаться от животного, используя при этом такую же физику.
Одна из простейших математических моделей описывает точечную массу (туловище), соединённую с парой идеальных пружин (ноги). Эта модель пружина-масса, конечно, упрощённая; она напоминает человечка из чёрточек и не учитывает наличие у ног суставов, или то, что ступни не касаются земли в изолированных точках. И всё же модель пружина-масса может выдавать неожиданные результаты. В симуляциях она может воспроизвести почти все походки, которые используют люди и животные для шага и бега.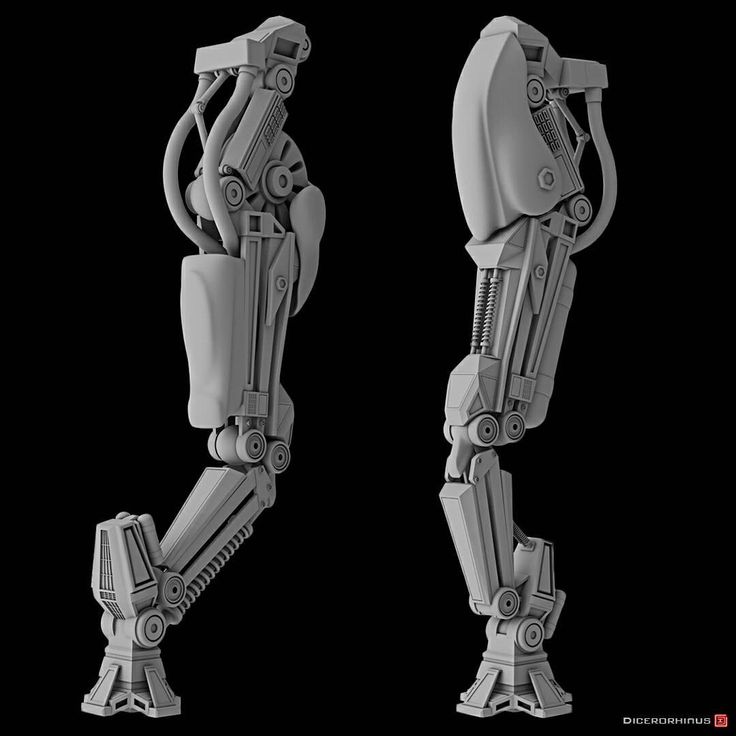
Первые шаги: ноги робота ATRIAS не похожи на человеческие, но он был первой машиной, демонстрировавшей походку, похожую на человеческую
Для проверки модели пружина-масса мы разработали двуногого робота ATRIAS, чьё имя является акронимом нашего основного предположения: Assume The Robot Is A Sphere [представим, что робот – это сфера]. Идея была в том, что пассивная динамика робота может как можно точнее воссоздавать модель точечной массы с пружинными ногами.
Каждая нога делается из лёгких углеволоконных стержней, собранных в параллелограмм, известный, как шарнирный четырёхзвенник. Подобная структура минимизирует массу ног и их инерцию, приближая систему к модели пружина-масса. Верхнюю часть ног мы оборудовали фиберглассовыми пружинами, физически реализующими «пружину» модели, обрабатывающими соударения с землёй и хранящими механическую энергию.
Сначала ATRIAS едва мог стоять, и мы поддерживали его при помощи верхней привязи. Но мы совершенствовали контроллер, отслеживающий скорость и наклон тела, и робот сначала начал делать первые шаги, а потом свободно ходить по лаборатории.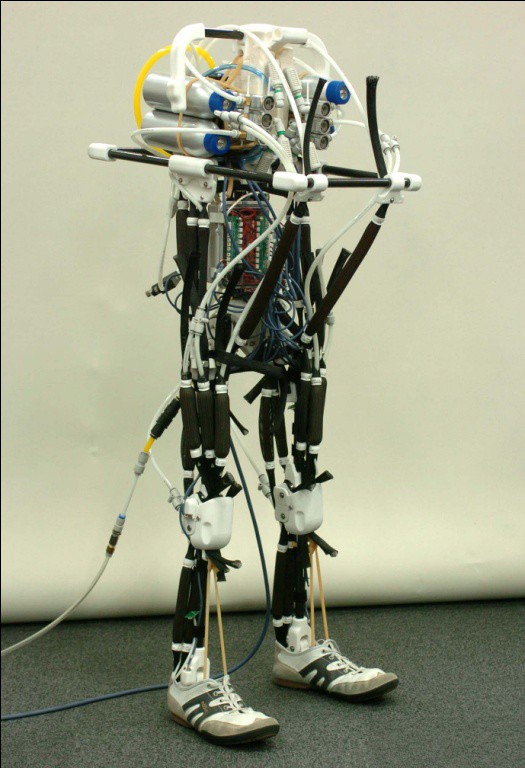 Затем ATRIAS научился восстанавливаться после возмущений – в одном из экспериментов мои студенты швырялись в него мячами. Ещё мы отвезли ATRIAS на университетское футбольное поле, ускорили его до максимальной скорости в 7,6 км/ч, и затем быстро остановили.
Затем ATRIAS научился восстанавливаться после возмущений – в одном из экспериментов мои студенты швырялись в него мячами. Ещё мы отвезли ATRIAS на университетское футбольное поле, ускорили его до максимальной скорости в 7,6 км/ч, и затем быстро остановили.
Чтобы лучше понять, что делал робот, представьте, что вам завязали глаза, вы ходите на ходулях, а ваше туловище завёрнуто в ковёр, и вы не можете использовать руки для балансировки. Вы можете только шагать дальше – это и делал ATRIAS. Он даже мог справляться с препятствиями, например, с кучей дров на пути.
И, хотя ловкость была важной составляющей, также было очень важно экономично расходовать энергию. Мы подтвердили экономичность робота, измерив параметр, известный, как стоимость перемещения [cost of transport, COT]. Он определяется, как отношение энергопотребления (мощности) к произведению веса на скорость, и используется для сравнения энергоэффективности перемещения животных и машин. Чем ниже СОТ, тем лучше. У шагающего человека СОТ равен 0,2, а у обычного гуманоидного робота этот показатель гораздо больше – от 2 до 3, по некоторым прикидкам.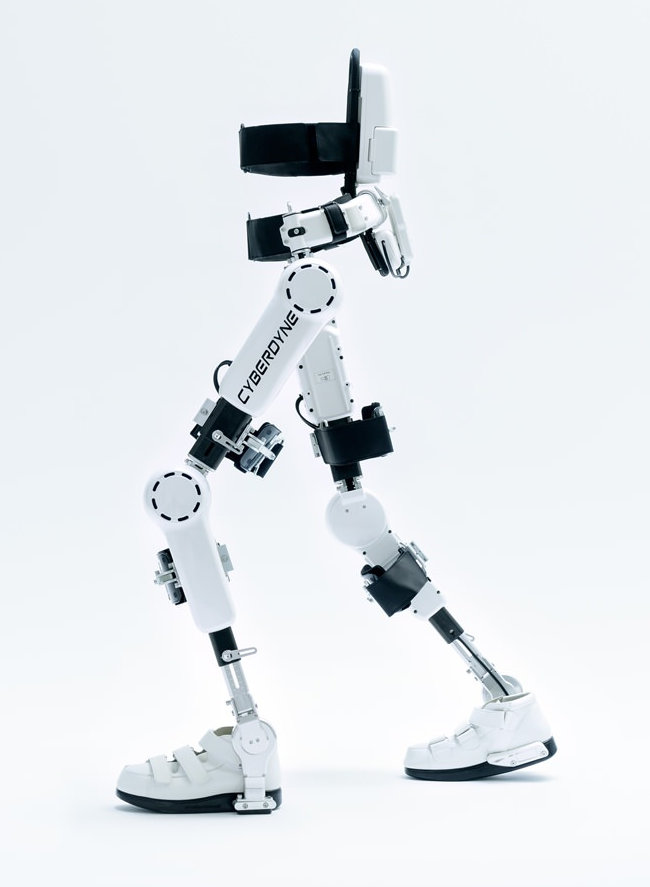 Наши эксперименты показали, что у ATRIAS в шагающем режиме СОТ равен 1,13, что демонстрирует эффективность динамических роботов. И в самом деле, питаясь от нескольких литий-полимерных аккумуляторов – таких, что используются в машинках на радиоуправлении – ATRIAS мог бы проработать примерно час.
Наши эксперименты показали, что у ATRIAS в шагающем режиме СОТ равен 1,13, что демонстрирует эффективность динамических роботов. И в самом деле, питаясь от нескольких литий-полимерных аккумуляторов – таких, что используются в машинках на радиоуправлении – ATRIAS мог бы проработать примерно час.
Мы также измерили силу, с которой робот давит на землю. Мы поставили ATRIAS весом в 72,5 кг (примерно как средний человек) на силовую платформу – этот инструмент часто используется в спортивной медицине для оценки походки человека через измерение сил реакции. При ходьбе робота мы записывали данные по силам. Затем место ATRIAS занял один из моих студентов, и мы записали его шаги. Построив график зависимости реакции опоры по времени, мы увидели, что он точно совпадает с графиком робота. Насколько нам известно, это наиболее реалистичная реализация динамики человеческой походки у роботов на сегодня.
Результаты подтвердили, что простую динамическую систему пружина-масса можно реализовать у робота. Она обладает множеством полезных свойств, таких, как эффективность, надёжность и гибкость, и добирается до сути ходьбы. Настало время создавать следующего робота.
Она обладает множеством полезных свойств, таких, как эффективность, надёжность и гибкость, и добирается до сути ходьбы. Настало время создавать следующего робота.
Для передвижения по сложной местности Кэсси использует пять моторов и по две пружины на каждой ноге
Кэсси, как и ATRIAS, динамический шагающий робот. Мы оптимизировали все аспекты его дизайна с тем, чтобы создать надёжного и способного робота, пригодного для коммерциализации. И мы поставили высокую планку: мы хотели, чтобы Кэсси могла бегать по лесу, ходить по пересечённой местности и работать по нескольку часов от батареи без поддерживающего подвеса.
Кэсси строится на тех же концепциях, что использовались для ATRIAS, но мы решили сделать ей совершенно новые ноги. Раньше мы использовали два мотора для питания каждого четырёхзвенника на каждой ноге. Такая схема минимизирует их массу, но есть и недостаток: во время ходьбы один мотор тормозил другой, что приводило к потерям энергии. При работе над Кэсси мы изучали другие конфигурации ног, чтобы устранить этот эффект. Новая схема позволяет сделать моторы меньше, и робот стал ещё эффективнее, чем ATRIAS.
Новая схема позволяет сделать моторы меньше, и робот стал ещё эффективнее, чем ATRIAS.
Важно отметить, что конфигурация ног Кэсси стала результатом этого анализа. То, что нога напоминает ногу страуса или другого теропода, может говорить о том, что мы находимся на правильном пути, но мы не стремились создать робота, который после покрытия его оперением смог бы затеряться в стае эму.
У каждой ноги Кэсси есть пять осей движения – или степеней свободы, говоря по-робототехнически – и каждой управляет свой мотор. У бёдер есть три степени свободы, как у наших, что позволяет ноге поворачиваться в любом направлении. У двух других моторов оси находятся в колене и ступне. У Кэсси есть дополнительные степени свободы в голени и лодыжке; они пассивные, и не контролируются моторами, а приделаны к пружинам, что позволяет роботу двигаться по сложной местности, неподвластной плоскостопным гуманоидам.
Новые ноги Кэсси потребовали создания более сложного низкоуровневого контроллера, чем был у ATRIAS.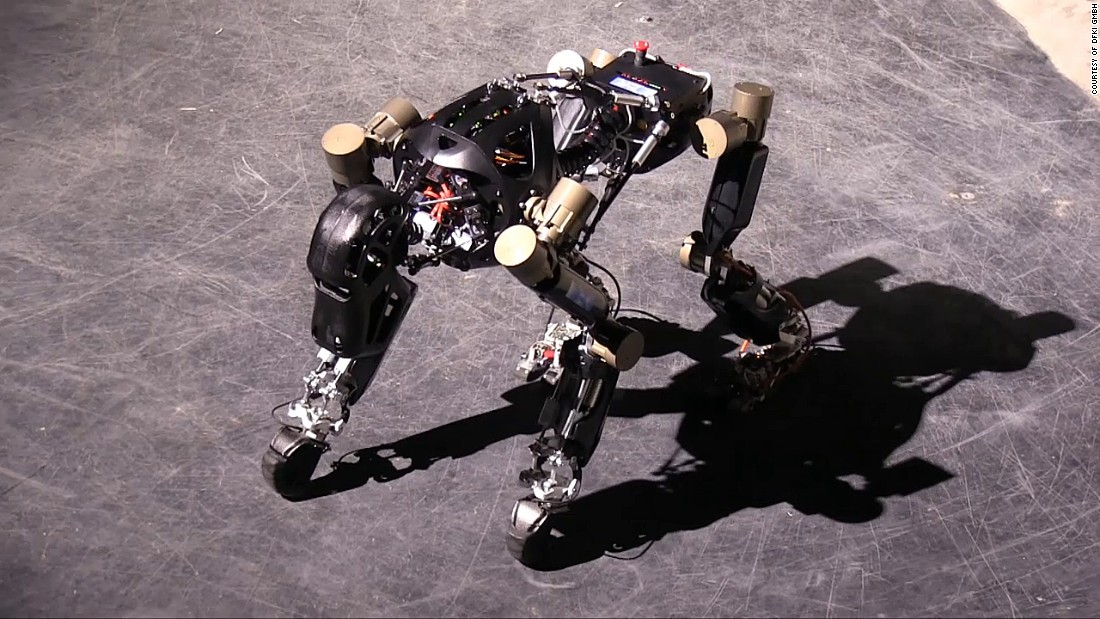 ATRIAS вытягивал ногу, просто прикладывая равные по силе и противоположные по направлению крутящие моменты с обоих моторов. У Кэсси передвижение ноги в определённом направлении требует расчёта разных крутящих моментов для разных моторов. Для этого контроллер должен учитывать инерцию ног и динамику моторов и коробок передач.
ATRIAS вытягивал ногу, просто прикладывая равные по силе и противоположные по направлению крутящие моменты с обоих моторов. У Кэсси передвижение ноги в определённом направлении требует расчёта разных крутящих моментов для разных моторов. Для этого контроллер должен учитывать инерцию ног и динамику моторов и коробок передач.
Контролер Кэсси использует запланированные шаги и динамическую балансировку
Да, задача контроллера стала сложнее, но этот метод позволяет эффективнее ходить и использовать более широкий спектр поведения. Кэсси может идти со скоростью до 5 км/ч, используя один из первых контроллеров. Энергопотребление разнится от 100 Вт (стоя) до 300 Вт (в движении), и на литий-ионной батарее она может работать 5 часов. Также новые ноги позволяют Кэссии лавировать так, как этого не мог ATRIAS. А благодаря мотору в суставе ступни она может стоять, без необходимости постоянно двигаться, так, как это делал ATRIAS.
Также Кэсси весит всего 31 кг, в два раза меньше, чем ATRIAS. Двух Кэсси можно загрузить в багажник машины менее чем за минуту. А ещё она более надёжная: её части сделаны из алюминия и углеволокна, а защитный корпус из прочного пластика акрил-поливинилхлорида, защищает её от столкновений и падений.
Двух Кэсси можно загрузить в багажник машины менее чем за минуту. А ещё она более надёжная: её части сделаны из алюминия и углеволокна, а защитный корпус из прочного пластика акрил-поливинилхлорида, защищает её от столкновений и падений.
Пока что Кэсси не умеет бегать по лесу. Но мы водили её на улицу, без страховки, и она ходит по земле, траве и павшим листьям. Сейчас мы изучаем вопрос интеграции динамического поведения робота с планированием движений, что позволяет ей, к примеру, подниматься по ступенькам. Мы также работаем над ещё одной возможностью, которая сделает роботов типа Кэсси более полезными: над руками.
У Диджита есть ноги, как и у Кэсси, но ещё у него есть туловище с датчиками внутри и пара рук, помогающих ему с мобильностью и балансом.
Диджит – прямой потомок Кэсси. У него похожие ноги, но мы добавили ему туловище с датчиками внутри и пару рук. Они специально сделаны для того, чтобы помогать ему с мобильностью и балансом, и качаются в соответствии с походкой. Они также позволяют Диджиту поддержать себя при падении и переиориентировать своё тело, чтобы встать.
Они также позволяют Диджиту поддержать себя при падении и переиориентировать своё тело, чтобы встать.
У Диджита есть кое-что ещё, чего нет у Кэсси: встроенное восприятие. Мы добавили ему множество датчиков, включая лидар в верхней части тела. Датчики помогают ему собирать данные, что позволяет роботу передвигаться в мире, полном препятствий, например, в захламлённых комнатах и по ступеням, и полагаться на стабильную динамику только в неожиданных ситуациях и при ошибках датчиков.
Диджиту, и роботу с ногами, который появится после него, предстоит ещё многому научиться. Но мы убеждены, что они изменят мир. Их влияние может сравниться с автомобилями в плане изменения стиля жизни людей, закономерностей дорожного движения и схем городов, где эти роботы обещают преобразовать логистику и доставку посылок.
В недалёком будущем, когда появятся робомобили, у производителей автомобилей и компаний, обеспечивающих совместные поездки, типа Lyft и Uber, будут свои огромные парки из машин, перевозящих людей, и максимум трафика будет приходиться на час пик, прямо как сегодня. Но чем будут заниматься эти машины поздно ночью и в середине дня? Они могут не простаивать, а перевозить посылки из автоматических складов до вашей двери. Однако эти машины смогут доехать только до тротуара – без человека доставить посылку до двери довольно сложно. И тут вступают в дело шагающие роботы. Они будут ездить в таких автомобилях и проходить последние несколько метров. И хотя колёса и крылья могут исполнять часть этих ролей, в мире, предназначенном для двуногих, ни одна другая платформа для передвижения не будет столь гибкой, как робот на ногах.
Но чем будут заниматься эти машины поздно ночью и в середине дня? Они могут не простаивать, а перевозить посылки из автоматических складов до вашей двери. Однако эти машины смогут доехать только до тротуара – без человека доставить посылку до двери довольно сложно. И тут вступают в дело шагающие роботы. Они будут ездить в таких автомобилях и проходить последние несколько метров. И хотя колёса и крылья могут исполнять часть этих ролей, в мире, предназначенном для двуногих, ни одна другая платформа для передвижения не будет столь гибкой, как робот на ногах.
Диджит учиться ходить по разной местности и подниматься по ступеням, чтобы однажды он смог доставлять посылки прямо до двери
Роботы-доставщики будут частью всё более автоматизируемой системы логистики, где посылки от производителя сразу доставляются до вашей двери. Эта система уменьшит стоимость доставки так, что посылки доставлять будет дешевле, чем покупать их в крупных, хорошо освещённых, подогреваемых складах с доступом человека. Мелкооптовые магазины станут ненужными. Люди, конечно, смогут наслаждаться покупками некоторых вещей. Но ежедневные продукты будут доставлять роботы, экономя вам время и деньги.
Мелкооптовые магазины станут ненужными. Люди, конечно, смогут наслаждаться покупками некоторых вещей. Но ежедневные продукты будут доставлять роботы, экономя вам время и деньги.
Двуногие роботы смогут проникнуть в наши дома и офисы. Они могут ходить по ступеням и в заставленных помещениях, взаимодействовать с людьми на безопасном уровне глаз и на человеческом масштабе, что позволит нам достойно стареть в наших домах. Они помогут таскать вещи и будут работать как устройства удалённого присутствия, что позволит членам семьи и друзьям использовать робота для того, чтобы общаться с людьми удалённо и составлять им компанию.
Роботы на ногах смогут пробираться туда, где людям находиться опасно. Они будут прыгать с парашютом в лесные пожары для сбора данных в реальном времени, бежать в горящие здания в поисках жителей, заходить на территорию катастроф, таких, как атомная станция Фукусима, изучая труднодоступные территории. Они будут регулярно инспектировать внутренние части гидроэлектростанций и заброшенных шахт, чтобы этого не пришлось делать нам.
Чтобы попасть в это будущее, нам нужно решить множество проблем. Но я убеждён, что сообщество робототехников может сделать эту технологию практичной. Это будет один маленький шаг для робота и огромный скачок для всего человечества.
Инженеры создали шагающего робота по модели птицы / Хабр
Группа динамического передвижения из Института интеллектуальных систем им. Макса Планка разработала шагающего робота; это устройство стоит на стыке биологии и робототехники в области биомеханики и нейроуправления. BirdBot с ногами, напоминающими птичьи конечности, требует меньше двигателей, чем другие роботы, и теоретически может масштабироваться до больших размеров.
Так, исследователи изучали ногу страуса. Страусы, некоторые из которых весят более 100 кг, бегают по саванне со скоростью до 55 км/ч. Считается, что выдающаяся двигательная активность страусов обусловлена строением ног животного. В отличие от людей, птицы сгибают ноги назад, когда подтягивают их к телу. При ходьбе люди подтягивают ступни и сгибают колени, но ступни и пальцы ног направлены вперед.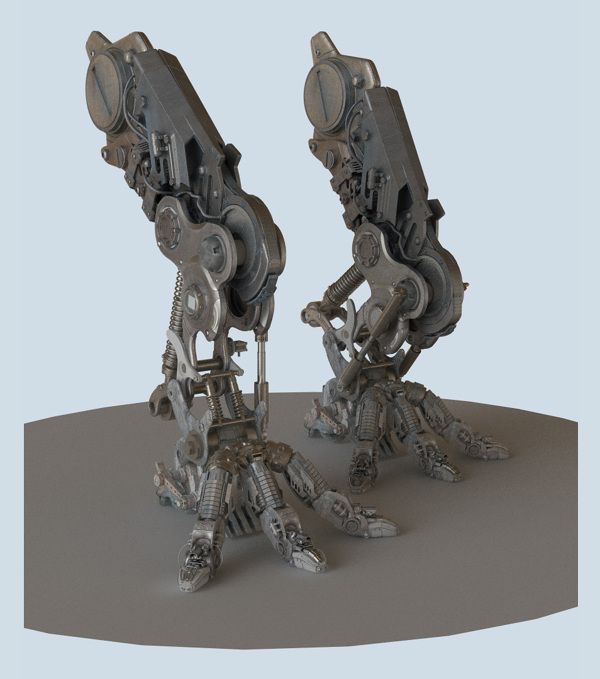 Исследователи выдвинули гипотезу о новой функции соединения стопы с ногой через сеть мышц и сухожилий, которая проходит через несколько суставов. Эти многосуставные мышцы и сухожилия координируют сгибание стопы в фазе переноса.
Исследователи выдвинули гипотезу о новой функции соединения стопы с ногой через сеть мышц и сухожилий, которая проходит через несколько суставов. Эти многосуставные мышцы и сухожилия координируют сгибание стопы в фазе переноса.
Также исследователи предполагают, что соединение суставов ног и стоп, а также задействованные силы и движения могут быть причиной того, что такое крупное животное, как страус, может не только быстро бегать, но и стоять, не уставая. Человек весом более 100 кг тоже может долго стоять, но только с «запертыми» коленями в вытянутом положении. Если человек немного присядет на корточки, то через несколько минут он уже устанет. Однако птицы даже спят с согнутыми ногами.
Ученые сделали своей задачей создать ногу робота-птицы, которой для удержания конструкции в вертикальном положении не требуется никакой мощности двигателя.
Чтобы проверить свою гипотезу, исследователи сконструировали искусственную птичью ногу без мотора, но с суставом, оснащенным пружинным и тросовым механизмом. Стопа механически связана с остальными суставами ноги с помощью тросов и шкивов. Каждая нога содержит только два двигателя: двигатель тазобедренного сустава, который качает ее вперед и назад, и небольшой двигатель, который сгибает коленный сустав, чтобы поднять ногу.
Стопа механически связана с остальными суставами ноги с помощью тросов и шкивов. Каждая нога содержит только два двигателя: двигатель тазобедренного сустава, который качает ее вперед и назад, и небольшой двигатель, который сгибает коленный сустав, чтобы поднять ногу.
После сборки исследователи проверили BirdBot на беговой дорожке. «Стопы и суставы ног не нуждаются в активации в фазе опоры», — говорят они. — «Пружины приводят в действие эти суставы, а многосуставной пружинно-сухожильный механизм координирует их движения. Когда ногу подтягивают в фазе переноса, ступня расцепляется с пружиной ноги — или пружиной мышц и сухожилий, как мы полагаем, это происходит у животных».
При этом в положении стоя нога не расходует энергию. «Раньше нашим роботам приходилось работать против пружины стоя или при подтягивании ноги, чтобы предотвратить столкновение с землей во время маха. Однако BirdBot это не нужно, а сам робот потребляет лишь четверть энергии своего предшественника.
Теперь при включении беговой дорожки робонога расцепляется с пружиной, сильное движение стопы ослабляет трос, а оставшиеся суставы свободно раскачиваются. Этот переход состояний между стоянием и махом обеспечивается в конструкциях большинства роботов мотором в суставе, где датчик посылает сигнал контроллеру, который включает и выключает моторы. «Раньше моторы переключались в зависимости от того, находилась ли нога в фазе маха или опоры. Теперь стопа берет на себя эту функцию в шагающем тренажере, механически переключаясь между стойкой и махом. Нам нужен только один двигатель в тазобедренном суставе и один двигатель, чтобы согнуть колено в фазе переноса. Мы оставляем подпружинивание и расцепление ног механике, вдохновленной птицами. Это надежно, быстро и энергоэффективно», — утверждают исследователи.
Этот переход состояний между стоянием и махом обеспечивается в конструкциях большинства роботов мотором в суставе, где датчик посылает сигнал контроллеру, который включает и выключает моторы. «Раньше моторы переключались в зависимости от того, находилась ли нога в фазе маха или опоры. Теперь стопа берет на себя эту функцию в шагающем тренажере, механически переключаясь между стойкой и махом. Нам нужен только один двигатель в тазобедренном суставе и один двигатель, чтобы согнуть колено в фазе переноса. Мы оставляем подпружинивание и расцепление ног механике, вдохновленной птицами. Это надежно, быстро и энергоэффективно», — утверждают исследователи.
Ранее ученые заметили, что строение птичьих ног не только экономит энергию при ходьбе и стоянии, но и приспособлено природой так, что животное почти не спотыкается и не травмируется. В систему встроен морфологический интеллект, который позволяет животному действовать быстро, не задумываясь об этом. Животные контролируют свои ноги при передвижении не только с помощью нервной системы, но также осязания или зрения.
«Структура с многосуставными мышцами-сухожилиями и уникальным движением стопы может объяснить, почему даже тяжелые и крупные птицы бегают так быстро, надежно и с низким энергопотреблением. Если я предположу, что все в птице основано на ощущениях и действиях, и животное наступает на неожиданное препятствие, оно может быть не в состоянии среагировать достаточно быстро. Восприятие и осязание, даже передача стимулов и реакция требуют времени», — говорят исследователи.
Однако птицы реагируют быстрее, чем позволяет нервная система, что указывает на механический вклад. Теперь, когда команда разработала BirdBot, физическую модель, непосредственно демонстрирующую, как работают эти механизмы, все стало более понятным: нога переключается механически, если в земле есть неровность. Переключение происходит мгновенно и без временной задержки.
Теоретически такую конструкцию робоноги метровой высоты можно использовать для создания роботов весом в несколько тонн, которые передвигаются с небольшими затратами энергии.
Ранее исследователи робототехники из CSAIL Массачусетского технологического института использовали моделирование на базе искусственного интеллекта, чтобы быстро научить робота-гепарда адаптировать свой стиль ходьбы к обстоятельствам. Робот уже побил рекорд скорости 3,9 м/с, или чуть более 14 км/ч, что быстрее средней скорости бега человека.
Роботизированная нога — Bilder und stockfotos
3.782Bilder
- Bilder
- FOTOS
- GRAFIKEN
- VEKTOREN
- VIDEOS
Durchstöbern SI 3,782
Durchstöbern SI 3,782
Durchstöbern SI 3,782
Durchstöbern SI 3,782
Durchstöbern. Oder starten Sie eine neuesuche, um noch mehr Stock-Photografie und Bilder zu entdecken.
moderne krankenhaus-physiotherapie: пациент mit verletzungen geht auf dem laufband mit fortschrittlichen roboter-exoskelett-beinen.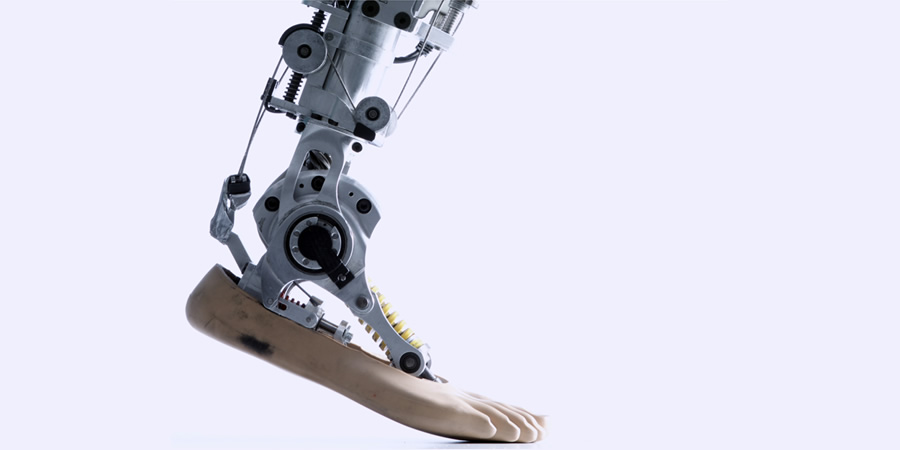 физиотерапевтическая реабилитационная технология, гм позади мужчин лауфен цу лассен. fokus auf beine — стоковые фотографии и изображения роботизированной ноги
физиотерапевтическая реабилитационная технология, гм позади мужчин лауфен цу лассен. fokus auf beine — стоковые фотографии и изображения роботизированной ноги
Moderne Krankenhaus-Physiotherapie: Patient mit Verletzungen…
liniensymbole der prothese festlegen — графика, -клипарт, -мультфильмы и -символы
Liniensymbole der Prothese festlegen
nahaufnahme eines mannes, der während beznut seiner physiotherapie — роботизированная нога, фото и фото
Nahaufnahme eines Mannes, der während seiner Physiotherapie ein…
Nahaufnahme eines Mannes mit einem angetriebenen Exoskelett während seiner Физиотерапия в Reha-Zentrum
иллюстрация роботов-роботов на насеме Бодене — роботизированная нога с графикой, клипартом, мультфильмами и символами
иллюстрациями роботов-роботов на насеме Бодене
роботом в виртуальной реальности. — стоковые фотографии и изображения роботизированной ноги
Frauenroboter в виртуальной реальности-Brille.
набор позади характерных слепых фрау мит рор, манн им роллштуль, фрау мит робота протез руки, mädchen auf krücken — роботизированная нога сток-графика, -клипарт, -мультфильмы и -символ
Набор скрытых характеристик Frau mit Rohr, Mann im Rollstuhl,
junge mannliche schwarze figur mit einem prothetischen bein, moderne menschen mit backerungen, neue medizinische technologien, flash editierbare vektor-illustration, клипарт — robotic leg stock-grafiken, -clipart, — Cartoons und -symbole
Junge männliche schwarze Figur mit einem prothetischen Bein,…
roboter-cartoon-figuren mit ai-roboter-maschinen — robotic leg stock-grafiken, -clipart, -cartoons und -symbole
Roboter-Cartoon-Figuren mit Ai-Roboter-Maschinen
Roboter-Zeichentrickfiguren mit Vektor-KI или Robotermaschinen mit Künstlicher Intelligenz. Moderne weiße Roboter, Spielzeug, Humanoid Androiden und Chatbots mit niedlichen Gesichtsbildchirmen, Antennen und Manipulatoren
eine sportliche frau mit beinprothese sitzt nach dem sporttraining an der frischen luft. ein konzert der kraft, des sports und der мотивация. — роботизированная нога, фото и изображения
ein konzert der kraft, des sports und der мотивация. — роботизированная нога, фото и изображения
Eine sportliche Frau mit Beinprothese sitzt nach dem…
Корректировка спортивного спринта с изображением роботизированной ноги — фото и изображения роботов
Корпорация спортивного спринта с изображением
Является ли это будущим роботизированных ног? | Инновация
Фотоиллюстрация Дэвида Арки
В 5 часов жарким июньским утром 2007 года капрал морской пехоты США. Уильям Гэдсби помог группе пехотинцев проникнуть на сельскохозяйственные угодья вокруг Кармы, сельскохозяйственного центра в неспокойной иракской провинции Анбар. Карма плоская, с обзором на многие мили, и после нескольких часов патрулирования Гэдсби забеспокоился. Мы здесь слишком долго , подумал он. Вероятно, они следят за нами .
Около 10 утра он услышал оглушительный хлопок. Облако дыма окутало его. Он попытался бежать, но ничего не вышло: дистанционно взорванная бомба превратила его правую ногу в массу запекшейся крови и хрящей. Он чувствовал только адреналин. Звеня в ушах, он перекатился и рванул прочь от места взрыва, пока не достиг обочины дороги. Когда он лежал в грязи, а санитар накладывал жгут на его правую ногу, пуля снайпера пробила ему левое колено.
Он чувствовал только адреналин. Звеня в ушах, он перекатился и рванул прочь от места взрыва, пока не достиг обочины дороги. Когда он лежал в грязи, а санитар накладывал жгут на его правую ногу, пуля снайпера пробила ему левое колено.
Мимо пронеслись новые пули. Гэдсби выкрикивал приказы, даже когда из его тела лились литры крови. Как только повстанцы бежали обратно на сельхозугодья, его люди остановили проезжающий грузовик и загрузили его в кузов. Его дыхание было прерывистым и сухим, он то приходил в себя, то терял сознание. В полевом госпитале священник отчитал ему последние обряды. Его глаза закрылись.
Очнулся через полтора дня в медицинском крыле базы в Германии. Чудом травматолог сохранил ему левую ногу, но правую отпилили выше колена.
За этим последовали месяцы боли: бесконечная физиотерапия, примерка протеза, задача заново научиться ходить. Гэдсби, 29 лет, столкнулся со всем этим лицом к лицу. После того, как его перевели на базу в Южной Калифорнии, он начал проводить дни, ковыляя вверх и вниз по пляжу, потому что ходьба по песку требовала больших усилий, и он думал, что это ускорит его выздоровление.
Нет. Частью проблемы был его протез. Стопа была сделана из углеродного волокна — высшего качества, как заверили его врачи, — и, хотя она немного прогибалась, устройство все равно казалось чрезмерно жестким. Каждый шаг посылал ударную волну по его спине. Он всегда болел.
«Я думал, что живу в эпоху, когда технологии только расширяются — каждый год происходит революционный прорыв», — сказал мне недавно Гэдсби, теперь уже муж, отец и стажер социального работника. «Это дало мне надежду. Есть, чем заняться».
Весной 2010 года он прочитал о новом типе протеза, который разрабатывает Хью Херр, глава группы биомехатроники в медиа-лаборатории Массачусетского технологического института. Сам герр был дважды ампутирован: в 1982 году, когда ему было всего 17 лет, он потерял обе ноги в результате обморожения, полученного во время альпинистской экспедиции. Получив степень магистра машиностроения в Массачусетском технологическом институте, докторскую степень по биофизике в Гарварде и постдокторскую работу по биомехатронике в Массачусетском технологическом институте, Герр разработал все более изощренный набор искусственных коленей, стоп и лодыжек. Его последним изобретением была полностью компьютеризированная система лодыжки и стопы под названием BiOM, которая имитировала ногу из плоти и крови, толкая пользователя вперед с каждым шагом. Он не был похож ни на один другой протез, представленный на рынке.
Его последним изобретением была полностью компьютеризированная система лодыжки и стопы под названием BiOM, которая имитировала ногу из плоти и крови, толкая пользователя вперед с каждым шагом. Он не был похож ни на один другой протез, представленный на рынке.
«Для меня этот парень, доктор Герр, был источником вдохновения, — говорит Гэдсби. «В отличие от остальных из нас, он не сидел без дела, думая: «Ну и дела, я бы хотел, чтобы они придумали гаджет получше». Он получил эти степени, чтобы исправить себя — и исправить всех остальных».
***
BiOM Герра (в рентгеновском снимке), полностью компьютеризированная система голеностопного сустава, не имела сходства ни с одним другим протезом.
Дэвид Арки
Менее чем через 20 лет, по его словам, «будет обычным делом выйти на улицу и увидеть кого-то, одетого в робота, то есть в какой-то бионический».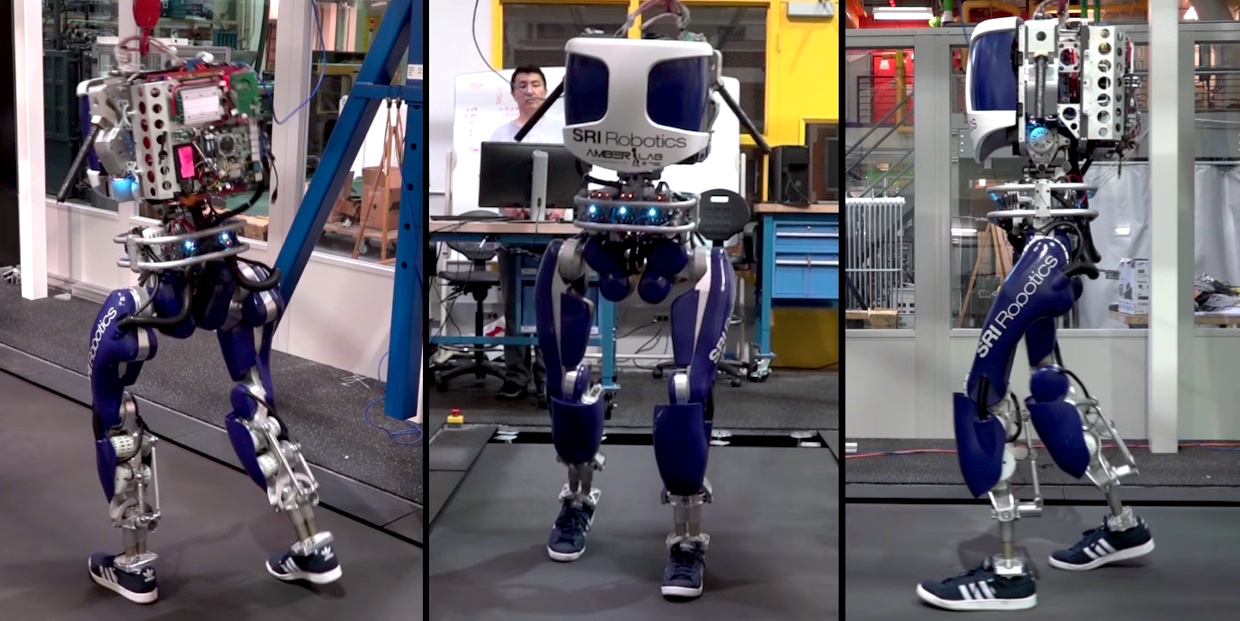
Дэвид Арки
Раненый в Ираке, Уильям Гэдсби стал одним из первых пациентов-испытателей BiOM для людей с ампутированными конечностями выше колена.
Логан Мок-Бантинг
Когда герр вернулся в скалы (в Аризоне в 1986) на протезах, которые он сконструировал, его лазание действительно улучшилось.
Бет Уолд / Аврора Фото
Благодаря сложным датчикам и двигателям BiOM имитирует походку человека более точно, чем другие протезы.
Джимми ДеВари, BiOM
«Это казалось реальным», — говорит Уильям Гэдсби о своем BiOM. Корни и камни раньше были опасными препятствиями, но «теперь я могу идти пешком».
Логан Мок-Бантинг
Благодаря сложным датчикам и двигателям BiOM имитирует походку человека более точно, чем другие протезы.
БиОМ
В течение последних четырех лет 30 с лишним членов группы биомехатроники Media Lab работали в лаборатории на втором этаже сверкающего стекла комплекса на Амхерст-стрит в Кембридже, недалеко от реки Чарльз. В светлом помещении с высокими потолками преобладает беговая дорожка, которая используется для тестирования протезов и экзоскелетных устройств. Среди гладких стоек из стекловолокна и полированных деталей машины выделяется один объект: резиновый придаток телесного цвета, известный как Jaipur Foot. Его присутствие в лаборатории носит талисманный, памятный характер. До сравнительно недавнего времени Джайпурская стопа, изобретенная в 1971, созданный индийским хирургом, представляет собой вершину науки о протезировании: неодушевленная шишка, имитирующая форму стопы, но не повторяющая ее функции.
«Дерево, резина, пластмасса», — продекламировал Хью Герр, когда я посетил его в Кембридже в начале этого года. «Во время моего несчастного случая это было реальностью. Были системы стопы-лодыжки, но не было вычислительного интеллекта. И многих ключевых технологических возможностей не было на месте, таких как недорогие, мощные, маленькие микропроцессоры. Многие сенсорные возможности были недоступны. То же самое касается источников питания и двигателей».
Лично герр, 51 год, имеет распутный вид — больше парижский художник, чем жесткий американский ученый. Он носит свои густые волосы, зачесанные назад, и предпочитает темные блейзеры и яркие шарфы. (На фотосессии для итальянского издания журнала Wired он позировал в сшитом на заказ комбинезоне из тонкого льна; увеличенное изображение обложки висит на видном месте в лаборатории Массачусетского технологического института.) Но впечатление обманчиво. Герр признался, что он «стоик до невозможности», и когда ему задают вопросы, которые он считает тривиальными или неинтересными, он имеет привычку говорить односложно.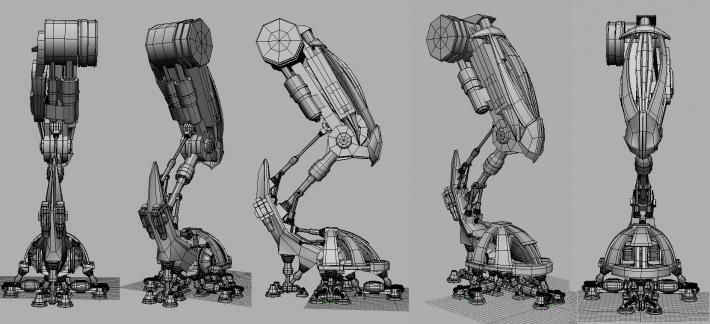 «Я просто не выражаю того, что у меня внутри», — цитируют герра. «Мои ученики, как правило, боятся меня, и я бы хотел, чтобы они этого не делали».
«Я просто не выражаю того, что у меня внутри», — цитируют герра. «Мои ученики, как правило, боятся меня, и я бы хотел, чтобы они этого не делали».
Отчасти стоицизм может быть реакцией на жизнь в центре внимания. Еще до того, как он потерял ноги, герр был сенсацией в мире скалолазания — красивый парень с меннонитской фермы в Пенсильвании, прокладывавший дикие и волосатые маршруты, которые с трудом повторяли даже закаленные ветераны. Его авария, возникшая в результате неудачного зимнего восхождения на гору Вашингтон в Нью-Гэмпшире, замедлила его на несколько месяцев, но вскоре он снова начал восхождение, используя протезы, которые он разработал в собственной мастерской. И происходило что-то странное: его лазание улучшалось. У него были гибкие резиновые ножки, которые помогали ему преодолевать сложные трещины, и специальные кошки для взбирания по ледяным стенам. Снова позвонили средства массовой информации — журналы, газеты, телевидение.
В то же время он постоянно сталкивался с предубеждениями против таких, как он.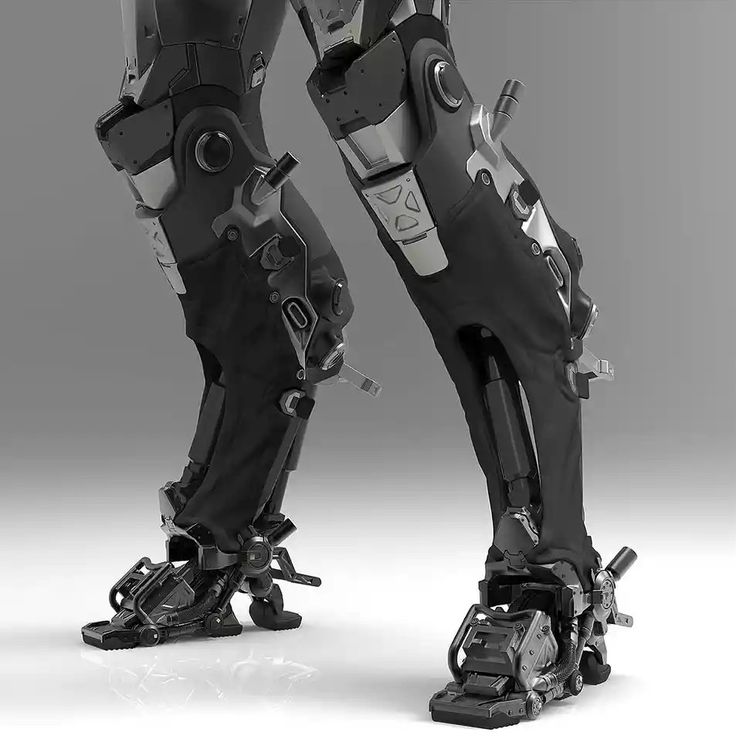 «Мой отец рассказал мне историю о том, как вскоре после того, как мне ампутировали конечности, к нему в больнице подошел человек и сказал: «О, мне очень жаль. Он не был женат, не так ли?» Я мгновенно стал недочеловеком!» — удивился господин. «Это было увлекательно. Мы все так запрограммированы думать, что необычное тело — слабое».
«Мой отец рассказал мне историю о том, как вскоре после того, как мне ампутировали конечности, к нему в больнице подошел человек и сказал: «О, мне очень жаль. Он не был женат, не так ли?» Я мгновенно стал недочеловеком!» — удивился господин. «Это было увлекательно. Мы все так запрограммированы думать, что необычное тело — слабое».
Он был полон решимости изменить это. Посредственный старшеклассник, теперь он поглощал учебники по математике целыми ящиками. В свои 20 лет он поступил в Миллерсвилльский университет, небольшую школу в нескольких милях от семейной фермы в Ланкастере, штат Пенсильвания. Будучи студентом, он получил свой первый патент на носок-протез, в котором использовалась система надувных камер и микропроцессоров, чтобы помочь носителю ходить лучше и комфортнее. Устройство — наряду с отличным средним баллом — привлекло внимание приемной комиссии Массачусетского технологического института, и в начале 1990-е Герр переехал в Кембридж, чтобы работать над своей степенью магистра. Он непрерывно изобретал, всегда возился, строил, улучшал. Патенты накапливались: на искусственные суставы, компьютеризированные лодыжки, биомиметические приводы суставов.
Он непрерывно изобретал, всегда возился, строил, улучшал. Патенты накапливались: на искусственные суставы, компьютеризированные лодыжки, биомиметические приводы суставов.
Индустрия протезов, казалось, оказалась в ловушке другого века, и Герр хотел перетащить ее в цифровую эпоху. «Было долгое время, когда в других секторах было много технологических достижений, но не в нашей области», — сказал мне Эллиот Вайнтроб, протезист из Вирджинии, который продает устройства BiOM. «Да, у вас было появление углеродного волокна, но улучшения были постепенными: более легкое углеродное волокно, более прочное углеродное волокно. Хорошо, какой следующий уровень? Следующим уровнем была мощность. Потому что независимо от того, сколько пружины у вас есть в этом углеродном волокне, пока вы не начнете пытаться заменить действие мышц, вы по своей природе ограничены. В этом была гениальность Хью Херра — он это понимал».
В 2007 году Герр основал бионическую компанию под названием iWalk (позже название было изменено на BiOM) и приступил к воплощению в жизнь передовых технологий, которые всегда его восхищали.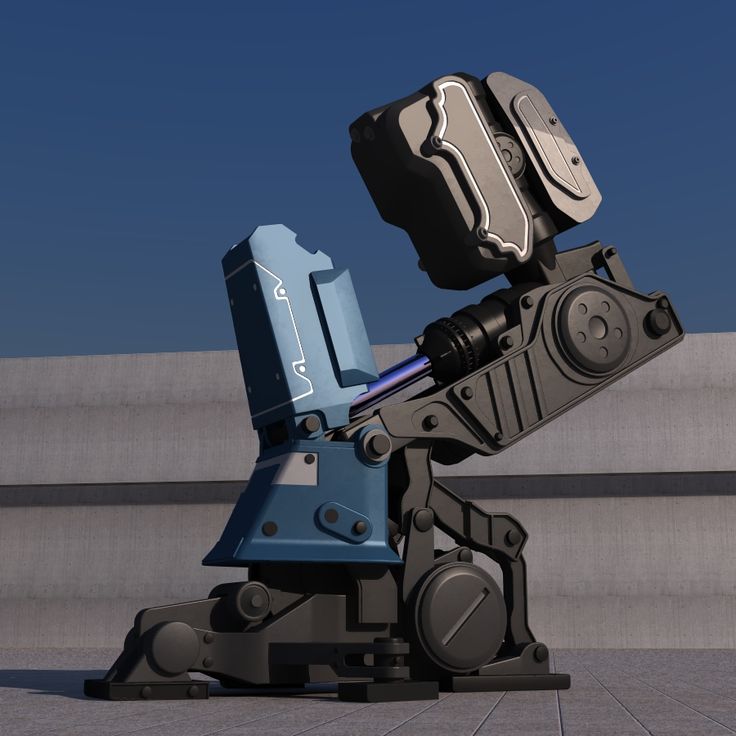 Исследования и разработки в области протезирования не особенно хорошо финансировались и не привлекали инженеров и ученых, но все быстро менялось. «Война с терроризмом, конфликты в Ираке и Афганистане и все эти возвращающиеся раненые позволили Конгрессу высвободить миллионы денег на исследования, — вспоминал герр. «Еще одним фактором было то, что ключевые дисциплины, относящиеся к бионике, созрели, от робототехники до тканевой инженерии. И они созрели до уровня, на котором мы действительно могли создавать бионику, как это представлялось Голливуду и писателям-фантастам».
Исследования и разработки в области протезирования не особенно хорошо финансировались и не привлекали инженеров и ученых, но все быстро менялось. «Война с терроризмом, конфликты в Ираке и Афганистане и все эти возвращающиеся раненые позволили Конгрессу высвободить миллионы денег на исследования, — вспоминал герр. «Еще одним фактором было то, что ключевые дисциплины, относящиеся к бионике, созрели, от робототехники до тканевой инженерии. И они созрели до уровня, на котором мы действительно могли создавать бионику, как это представлялось Голливуду и писателям-фантастам».
Герр сосредоточил свое внимание на лодыжке, устрашающе сложной части человеческой анатомии, которая традиционно недооценивается технологиями протезирования. К концу 2009 года велись испытания PowerFoot BiOM, первой системы для голени, использующей робототехнику для замены функции мышц и сухожилий. Используя встроенные микропроцессоры и трехэлементную ионно-литиевую батарею, устройство фактически продвигало пользователя вперед с каждым шагом, как органическая мышца. В качестве движущей силы BiOM полагался на изготовленную на заказ пружину из углеродного волокна — каждый раз, когда пользователь нажимал на устройство, пружина заряжалась потенциальной энергией. На более высоком уровне эта энергия была дополнена небольшим мотором с батарейным питанием.
В качестве движущей силы BiOM полагался на изготовленную на заказ пружину из углеродного волокна — каждый раз, когда пользователь нажимал на устройство, пружина заряжалась потенциальной энергией. На более высоком уровне эта энергия была дополнена небольшим мотором с батарейным питанием.
Но герр и его команда знали, что все шаги не одинаковы: для подъема по крутому склону требуется совсем другая походка и совсем другие части тела, чем при ходьбе по теннисному корту. Поэтому они разработали запатентованный алгоритм, который измерял угол и скорость начального удара пяткой BiOM и контролировал с помощью микропроцессоров скорость и угол спуска на следующем шаге.
BiOM весил около пяти фунтов (более или менее вес человеческой лодыжки и стопы) и крепился к культе пользователя с помощью простой втулки из углеродного волокна. Тесты показали, что устройство возвращало около 200 процентов нисходящей энергии тела. Первоклассный карбоновый протез вернулся всего 9 раз0 процентов.
Потекли десятки миллионов долларов венчурного капитала.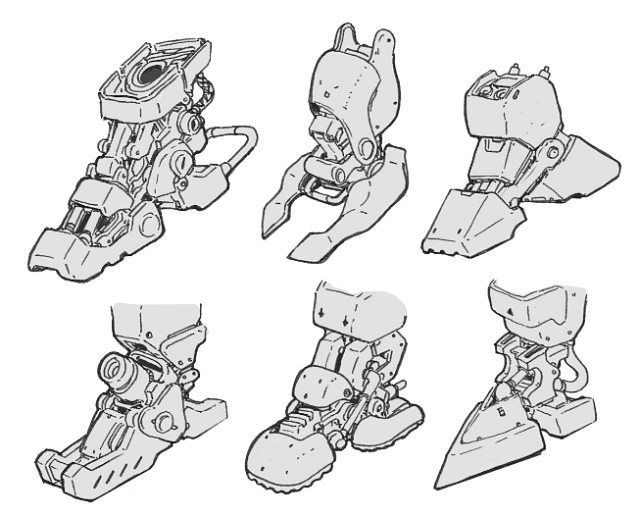 То же самое касается электронных писем и писем от людей с ампутированными конечностями, отчаянно желающих стать подопытными кроликами БиОМ. Этот шквал не прекратился. «Это ошеломляет», — сказал мне герр, качая головой. «Это эмоционально тяжело и душераздирающе».
То же самое касается электронных писем и писем от людей с ампутированными конечностями, отчаянно желающих стать подопытными кроликами БиОМ. Этот шквал не прекратился. «Это ошеломляет», — сказал мне герр, качая головой. «Это эмоционально тяжело и душераздирающе».
В наши дни герр является чем-то вроде профессионального жонглера: помимо своих должностей в БиОМ и лаборатории биомехатроники, он преподает в Массачусетском технологическом институте и Гарварде. Он ездит читать лекции и консультироваться по другим бионическим проектам. Он по-прежнему занимается скалолазанием, когда может, хотя в последние годы самым известным альпинистом в семье была его жена Патрисия Эллис Херр, чья книга 2012 года «9».0049 Up: A Mother and Daughter’s Peakbaging Adventure подробно рассказывает о семейном квесте по восхождению на 48 самых высоких гор в Нью-Гэмпшире. Дочери Херров, Алекс, 11 лет, и Сейдж, 9 лет, заядлые альпинисты. Хью присоединяется к ним в походах, когда может, но проводит большую часть своей бодрствующей жизни в лаборатории.
Перед тем, как уйти из Массачусетского технологического института, я спросил герра, устраивает ли его роль открытого сторонника бионики и самого видного бионического человека. Он сделал паузу. «Нас постоянно окружают сообщения о том, что технологии не приносят нам пользы: загрязнение окружающей среды, ядерное оружие и так далее», — наконец сказал он, изучая свои ноги. «Я пример противоположной тенденции. Так что да, меня это устраивает. Боже, да».
***
В марте этого года герр прилетел в Ванкувер, чтобы выступить на конференции TED, ежегодном саммите знатоков науки и техники. Его выступление было в значительной степени автобиографичным: он рассказал о своем несчастном случае, своих первых изобретениях и паре первых протезов, которые позволили ему отрегулировать свой рост с 5 футов до 6 1/2 футов плюс. («Когда я чувствовал себя плохо, неуверенно, я поднимал свой рост, — шутил он, — но когда я чувствовал себя уверенно и учтиво, я снижал свой рост на ступеньку ниже, просто чтобы дать шанс конкурентам. »)
»)
Затем свет погас и снова зажегся, и герр представил профессиональную танцовщицу бальных танцев по имени Адрианна Хаслет-Дэвис. В 2013 году Хаслет-Дэвис потеряла часть левой ноги, когда террористы взорвали пару бомб на Бостонском марафоне; теперь, когда толпа замерла, она и ее партнер по танцам Кристиан Лайтнер исполнили изящную румбу. Если бы вы не заметили, как блестит протез, который ей поставил герр, вам было бы трудно узнать, что Хаслет-Дэвис когда-либо была ранена — ее движения ног были ослепительно точными, дотошными и элегантными.
Представление, видео которого было просмотрено в сети более 2,5 миллионов раз, стало свидетельством исцеляющей силы высоких технологий. Это также была громкая демонстрация BiOM T2, преемника iWalk BiOM. В T2 используется та же базовая архитектура и алгоритмы, что и в исходном устройстве, но батарея легче и долговечнее, а двигатель более надежен. Этой осенью BiOM выпустит приложение для Android, которое позволит пользователям отслеживать шаги и время автономной работы, а также сохранять некоторый контроль над уровнями движения. «Если вы просто сидите в офисе, вы можете немного сбавить обороты», — сказал мне Чарльз С. Кариньян, генеральный директор BiOM. «Но допустим, вы хотите выйти и подняться на несколько крутых холмов. Что ж, тогда вам, вероятно, понадобится дополнительная мощность.
«Если вы просто сидите в офисе, вы можете немного сбавить обороты», — сказал мне Чарльз С. Кариньян, генеральный директор BiOM. «Но допустим, вы хотите выйти и подняться на несколько крутых холмов. Что ж, тогда вам, вероятно, понадобится дополнительная мощность.
Компания BiOM заявляет, что распространила более 900 систем для голеностопного сустава BiOM, почти половина из которых досталась ветеранам, таким как Уильям Гэдсби. Пол Паскина, полковник армейского медицинского корпуса и начальник Объединенного отделения ортопедии и реабилитации Армейского медицинского центра Уолтера Рида, называет эту технологию «революционной». По его словам, протезы без привода не могут имитировать естественную походку, и пользователи пытаются компенсировать это другими группами мышц. Это может привести к боли, дегенерации, остеоартриту и серьезному скелетно-мышечному и когнитивному стрессу. Бионика, по словам Паскины, в сочетании с агрессивной реабилитацией может лучше компенсировать потерю конечности и улучшить баланс и функцию. «Чем больше вы сможете имитировать естественные движения человека, тем лучше для человека», — сказал Паскина. «В этом смысле, я считаю, технология говорит сама за себя».
«Чем больше вы сможете имитировать естественные движения человека, тем лучше для человека», — сказал Паскина. «В этом смысле, я считаю, технология говорит сама за себя».
Но BiOM T2 продается примерно за 40 000 долларов, и герру не удалось вызвать такой же энтузиазм у гражданских страховых компаний. В прошлом году он и несколько его пациентов дали показания перед комиссиями Конгресса, чтобы убедить администраторов Medicare предоставить бионические конечности людям с ампутированными конечностями. Частично их аргумент был сосредоточен на профилактических преимуществах BiOM. Да, аппарат дорогой. Но разве затраты не оправданы, если страховщики экономят деньги на болеутоляющих, лечении остеоартрита и других мерах, необходимых для лечения побочных эффектов традиционных протезов? В конечном итоге был выдан код Medicare; несколько компаний, предоставляющих компенсацию работникам, также согласились оплатить BiOM. Тем не менее, более широкое признание в страховой отрасли остается недостижимым.
Дэвид Конрод, специалист по связям с общественностью, несколько десятилетий назад потерявший ногу в результате промышленной аварии в Канаде, был одним из пациентов, давших показания герру. Его система BiOM оплачивается компенсационным планом работников, но он ожидает, что больше страховых компаний придут к идее бионического протезирования. «Люди по умолчанию используют то, что они знают, и они еще не знают бионику», — сказал он. «Эти продукты не используют миллионы людей. Но я думаю, что это такая дополнительная ценность для людей с ампутированными конечностями… что это станет обычным явлением. Многие, многие люди будут носить такие же ноги, как у меня».
***
И все же провести какое-то время с Хью Херром означает понять, что он уже думает не только о мире, где бионика используется только для помощи раненым, но и о будущем, где бионика станет неотъемлемой частью повседневной жизни. Менее чем через 20 лет, сказал он мне, «будет обычным делом выйти на улицу и увидеть кого-то, одетого в робота, то есть в какой-то бионический».
Однажды днем в лаборатории биомехатроники я наблюдал, как группа докторантов Герра тестировала экзоскелетный бандаж для ног на беговой дорожке. Устройство, состоящее из распорок из стекловолокна, предназначено для расширения возможностей пользователя — строитель может надеть его, чтобы поднять тяжелый груз, или морской пехотинец может надеть его, чтобы пройти дополнительные 50 миль с рюкзаком за спиной. В последнее время лаборатория превратилась в настоящую фабрику такой же высококлассной бионики, от роботизированных конечностей, которые могут «читать» землю впереди и соответствующим образом регулировать потребляемую мощность и угол, до частей полностью автономного экзоскелета — изобретения герра и его команды. представленный ранее в этом году с большой помпой в Журнал нейроинженерии и реабилитации .
«Когда вы смотрите на человека с точки зрения его двигательной функции, некоторые аспекты впечатляют, — сказал Герр. «Наши конечности очень универсальны: мы можем двигаться по очень пересеченной местности, мы можем танцевать, мы можем стоять на месте. Но… наши мышцы, когда они выполняют положительную работу, выделяют 75 процентов в виде тепла и только четверть — механическая работа. Так что мы довольно неэффективны, мы довольно медленны и не очень сильны. Это недостатки, которые мы можем исправить».
Но… наши мышцы, когда они выполняют положительную работу, выделяют 75 процентов в виде тепла и только четверть — механическая работа. Так что мы довольно неэффективны, мы довольно медленны и не очень сильны. Это недостатки, которые мы можем исправить».
Следующим рубежом бионики, как считает Герр, станут устройства с нейронным управлением. На данный момент BiOM работает независимо от мозга, с алгоритмом и процессором, управляющим движением протеза. Но Герр работает над датчиками, которые могут подключаться к нервной системе тела — в конечном итоге мы могли бы увидеть протез, управляемый мозгом, мышцами и нервами.
Конечно, как быстро признает герр, невозможно думать о соединении плоти и робототехники, не думая об антиутопии Филипа К. Дика или таких фильмах, как «9».0049 Трансформеры серии , где машины затмили человечество. «Боюсь, что спаривание будет таким, что человек, как бы он ни определялся, больше не будет контролировать», — сказал он. Герр недавно руководил созданием Центра экстремальной бионики в Массачусетском технологическом институте, который будет изучать более экспериментальные формы робототехники. В рамках деятельности центра он надеется собрать группу юристов, ученых и философов, чтобы помочь направлять «политику в отношении аугментации».
В рамках деятельности центра он надеется собрать группу юристов, ученых и философов, чтобы помочь направлять «политику в отношении аугментации».
«В этом столетии мы будем продвигать технологии, которые коренным образом изменят человеческие возможности», — сказал он мне. «И в этом есть настоящая красота — есть реальная польза для человечества в том, что вы можете искоренить инвалидность. Существует также реальный риск, поэтому нам необходимо разработать политику, соразмерную этим новым технологиям. И, на мой взгляд, движущие силы политики в отношении аугментационных технологий должны быть сосредоточены на повышении человеческого разнообразия».
В конце концов, предположил он, протезирование может стать образом жизни, как пирсинг в носу или татуировка, «где наши тела являются формой искусства, и мы можем просто создать любой тип тела. Затем мы видим смерть нормальности, смерть стандартных взглядов на человеческую красоту. Затем вы идете по улице через 50 лет, и это похоже на сцену в столовой из «Звездных войн». Это то, что я хочу.»
Это то, что я хочу.»
***
Одним влажным летним днем я встретил Уильяма Гэдсби в ресторане в Северной Вирджинии, где он сейчас живет со своей женой Татьяной, программисткой, и их 5-летним сыном. Четыре года назад, после долгого лоббирования, Гэдсби получил разрешение от Управления по делам ветеранов на участие в ранней программе тестирования BiOM для людей с ампутацией выше колена или трансфеморальной ампутацией. (Устройство использовалось для пациентов с ампутацией ниже колена, потому что снижение походки людей с трансфеморальной ампутацией значительно труднее компенсировать.) Проведя рукой по своим коротко стриженным светлым волосам, Гэдсби вспомнил, как явился в офис своего протезиста для примерки. — длительный процесс, при котором прошивка БиОМ синхронизируется с походкой пользователя.
«Я не думаю, что большинство «органических» людей, как я их называю, понимают отдачу энергии, которую они получают от своих ног», — сказал Гэдсби. «Но когда вы стоите на ноге из углеродного волокна… вы тратите на 100% больше энергии только для того, чтобы передвигаться, и, черт возьми, это больно.