3DNews Технологии и рынок IT. Новости мир роботехники Учёные создали робота-осьминога, который… Самое интересное в обзорах 09.10.2020 [23:16], Николай Хижняк Для помощи в исследовании подводной флоры и фауны без вреда для кораллов и морских обителей команда инженеров из Калифорнийского университета в Сан-Диего разработала нового робота-осьминога. В его основе преимущественно используются мягкие материалы, вроде того же акрилового полимера. В то же время некоторые части его конструкции жёсткие и были изготовлены с помощью технологии 3D-печати. Источник изображения: JacobsSchoolNews Исследователи подсмотрели механизм подводного передвижения живых осьминогов и адаптировали его в своём роботе. Компактная машина использует воду и энергию упругости для передвижения. «Мы по сути воссоздали все ключевые особенности, которые используются осьминогами для быстрого передвижения под водой», — прокомментировал Майкл Толли (Michael Tolley), профессор кафедры механики и аэрокосмической инженерии, а также ведущий автор разработки. По словам разработчика, это первый автономный подводный робот, способный производить с помощью воды реактивные импульсы, которые позволяют ему передвигаться, как осьминогу. При этом импульсы машина создаёт непосредственно с помощью своего эластичного тела, что в целом повышает её эффективность. Специалисты также отмечают, что максимальная скорость передвижения компактного робота-осьминога составляет около 800 метров в час. Источник: Если вы заметили ошибку — выделите ее мышью и нажмите CTRL+ENTER. Материалы по теме Постоянный URL: https://3dnews.ru/1022620/uchyonie-sozdali-robotaosminoga-kotoriy-plavaet-kak-nastoyashchiy Рубрики: Теги: ← В |
 Сначала робот-осьминог сжимается, набирая внутрь своего мягкого тела небольшое количество воды, а затем резко разжимается, высвобождая набранную воду с помощью энергии упругости. Сопло для воды может изменять свой угол, поэтому робот может плыть практически в любом направлении.
Сначала робот-осьминог сжимается, набирая внутрь своего мягкого тела небольшое количество воды, а затем резко разжимается, высвобождая набранную воду с помощью энергии упругости. Сопло для воды может изменять свой угол, поэтому робот может плыть практически в любом направлении. Этот показатель гораздо выше тех возможностей, которые демонстрирует большинство других мягких роботов для подобной сферы использования. В составе робота-осьминога также имеется водозащищённый отсек, в который можно установить камеру или какой-нибудь исследовательский датчик сбора научной информации.
Этот показатель гораздо выше тех возможностей, которые демонстрирует большинство других мягких роботов для подобной сферы использования. В составе робота-осьминога также имеется водозащищённый отсек, в который можно установить камеру или какой-нибудь исследовательский датчик сбора научной информации.западный робот-осьминог научился аккуратно двигать предметы
Новая разработка американских ученых — подобный медузе робот способен захватывать разные предметы с помощью «механики кудрявых волос», чтобы не нанести никаких повреждений.
Юрий Гандрабура
Harvard Microrobotics Lab/Harvard SEAS
А вы хотите себе «домашнего» робота? Может у вас уже есть робот-пылесос? Расскажите о вашем опыте в комментариях!
Большинство современных роботов и их технологии захвата полагаются на встроенные датчики, сложные петли обратной связи или передовые алгоритмы машинного обучения в сочетании с навыками оператора для удержания хрупких объектов. Теперь же ученые из Гарвардской школы инженерии и прикладных наук имени Джона А. Полсона (SEAS), США, нашли более простой и действенный способ: на помощь пришел похожий ни то на медузу, ни то на осьминога робот.
Вдохновившись природой, американские инженеры разработали новый тип «мягкой» технологии роботизированного захвата, которая подразумевает собой набор тонких щупалец: подобно тому, как медуза собирает оглушенную добычу. В одиночку отдельные щупальца или нити слабы, но вместе этот набор может захватывать и надежно удерживать тяжелые предметы и предметы необычной формы. Метод опирается на воздух внутри щупалец и не требует контроля с обратной связью.
Метод опирается на воздух внутри щупалец и не требует контроля с обратной связью.
«С помощью нашей работы мы хотели переосмыслить, как мы взаимодействуем с объектами», — говорит Кейтлин Беккер, бывший аспирант и научный сотрудник SEAS. «Используя преимущества естественной податливости мягкой робототехники и улучшая ее непривычными структурами, мы разработали стратегию захвата, которая может адаптироваться к ряду сложных объектов с минимальным планированием действий».
Сила и приспособляемость робота-медузы заложены в его способности «запутываться» в объекте, который он пытается схватить. Нити длиной примерно 30 см представляют собой полые резиновые трубки. Одна сторона трубки имеет более толстую резину, чем другая, поэтому, когда щупальца под давлением, она завивается. Так, локоны связываются и координируют друг с другом и с объектом. Главное: технология не повредит даже самый хрупкий предмет, а чтобы освободить его, нити просто разгерметизируют.
youtube
Нажми и смотри
Передовые технологии
Американские исследователи провели серию экспериментов, чтобы проверить эффективность захвата, поднимая ряд предметов, включая различные комнатные растения и игрушки. Новую технологию можно использовать через приложение, например, для перемещения мягких фруктов и овощей на сельскохозяйственном производстве и распределения хрупких объектов в медицинских учреждениях.
Новый метод сочетает в себе исследования профессора Л. Махадевана по топологической механике запутанных нитей с исследованиями профессора Роберта Вуда по мягким роботизированным захватам. «Запутанность позволяет каждой высоко податливой нити локально согласовываться с целевым объектом, что приводит к безопасному, но мягкому топологическому захвату, который относительно не зависит от деталей природы контакта», — говорит Махадеван, профессор прикладной математики.
«Этот новый подход к роботизированному захвату дополняет существующие решения, заменяя простые традиционные захваты, требующие сложных стратегий управления, чрезвычайно податливыми нитями, которыми просто управлять», — отметил Роберт Вуд, профессор инженерии.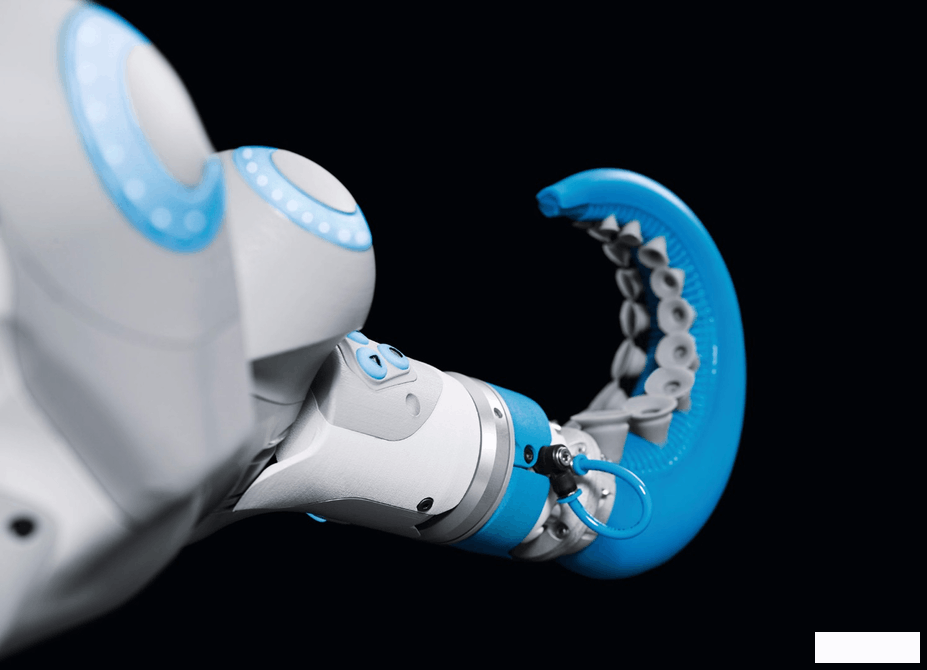
Робот-осьминог указывает путь к мягкой робототехнике с помощью восьми волнистых рук
Как профессор Института биоробототехники Высшей школы Святой Анны в Пизе, Италия, я возглавляю группу, изучающую мягкую робототехнику. Эта относительно новая область исследований может перевернуть наши представления о том, на что способны роботы и где они могут быть полезны. Я решил создать роботов, имитирующих форму осьминога, по двум причинам. Во-первых, потому что они хорошо подходят для демонстрации многих преимуществ, которые возникают, когда машина может изгибаться и сжиматься по мере необходимости. Кроме того, это отличная инженерная задача: осьминога с восемью волнистыми руками, которые должны работать вместе перед лицом сложных гидродинамических сил, очень сложно спроектировать и контролировать.
Руки октобота могут сгибаться и захватывать. Gif: The BioRobotics Institute/Scuola Superiore Sant’Anna
В ходе нашего исследования моя команда надеялась спровоцировать фундаментальное переосмысление робототехнических теорий и методов. Мы хотели продемонстрировать материалы, которые можно использовать в приводах, которые изгибаются и растягиваются. Что еще более важно, мы стремились разработать стратегии управления роботом, который может сгибать свои конечности в любом направлении, что делает его гораздо более сложным в управлении, чем жестким шарнирным роботом с конечностями, имеющими всего несколько степеней свободы. Чтобы решить эти проблемы, мы черпали вдохновение в замысле природы замечательного осьминога из плоти и крови.
Мы хотели продемонстрировать материалы, которые можно использовать в приводах, которые изгибаются и растягиваются. Что еще более важно, мы стремились разработать стратегии управления роботом, который может сгибать свои конечности в любом направлении, что делает его гораздо более сложным в управлении, чем жестким шарнирным роботом с конечностями, имеющими всего несколько степеней свободы. Чтобы решить эти проблемы, мы черпали вдохновение в замысле природы замечательного осьминога из плоти и крови.
До недавнего времени роботы в основном использовались на фабриках, где их жесткие руки хорошо подходят для выполнения повторяющихся задач и требуемой точности. Однако теперь робототехники хотят заставить свои творения работать в более непредсказуемых условиях, где обычные роботы часто сталкиваются с проблемами.
Некоторые исследователи хотят создать гибких роботов, способных перемещаться по неровным ландшафтам, таким как дно океана или поверхность Марса [pdf]. Эти роботы должны двигаться по пересеченной местности, не застревая, и им нужны манипуляторы, которые могут захватывать любые объекты странной формы, с которыми они сталкиваются. Другие исследователи сосредоточены на мягких роботах, которым можно доверять, чтобы они не причиняли вреда людям, с которыми они вступают в контакт. Такие мягкие роботы могли бы, например, работать помощниками для инвалидов или пожилых людей, а миниатюрные мягкие роботы могли бы даже служить хирургическими инструментами внутри тела.
Эти роботы должны двигаться по пересеченной местности, не застревая, и им нужны манипуляторы, которые могут захватывать любые объекты странной формы, с которыми они сталкиваются. Другие исследователи сосредоточены на мягких роботах, которым можно доверять, чтобы они не причиняли вреда людям, с которыми они вступают в контакт. Такие мягкие роботы могли бы, например, работать помощниками для инвалидов или пожилых людей, а миниатюрные мягкие роботы могли бы даже служить хирургическими инструментами внутри тела.
Преследуя эти цели, исследователи робототехники все чаще изучают животных. Это имеет смысл, потому что тела животных состоят в основном из мягких материалов, с гибкими суставами и тканью, которая может менять форму без повреждений. Поскольку их мягкие ткани поглощают удары и могут приспосабливаться к различным поверхностям, животные могут использовать простые стратегии управления, не требующие большой точности.
Вот почему я помог запустить проект интеграции Octopus.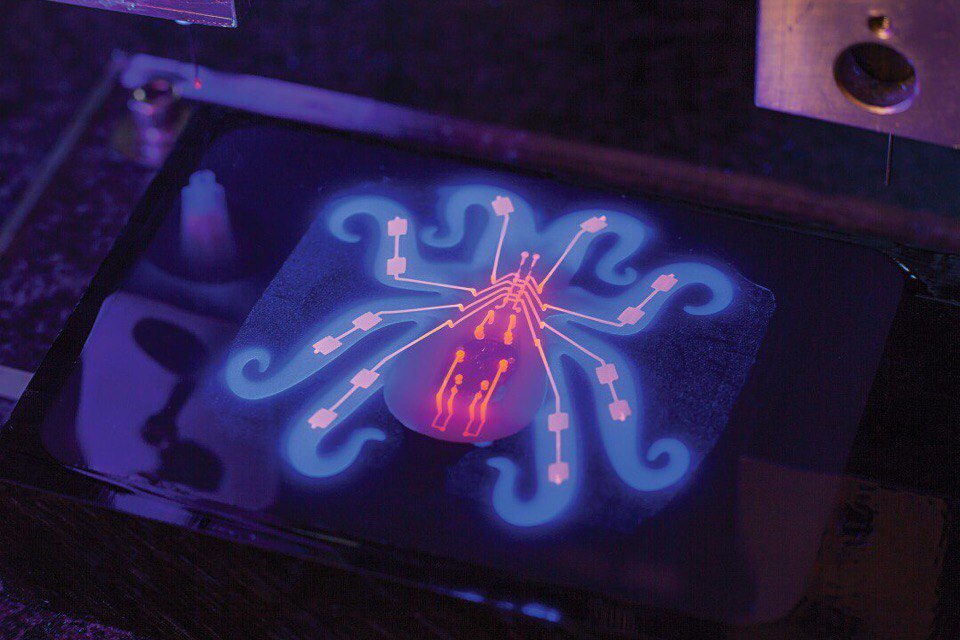 В проекте приняли участие несколько лабораторий из европейских и израильских университетов, которые начали совместную работу в 2009 году.построить робота-копию очаровательного животного. Некоторые члены консорциума уже работали над предыдущим проектом, в результате которого к танкоподобному роботу была прикреплена OctArm, и они охотно присоединились к новым усилиям по копированию замечательных способностей животного. Мы знали, что это будет непросто.
В проекте приняли участие несколько лабораторий из европейских и израильских университетов, которые начали совместную работу в 2009 году.построить робота-копию очаровательного животного. Некоторые члены консорциума уже работали над предыдущим проектом, в результате которого к танкоподобному роботу была прикреплена OctArm, и они охотно присоединились к новым усилиям по копированию замечательных способностей животного. Мы знали, что это будет непросто.
Иллюстрация: Эмили Купер
Октоанатомия: В настоящей руке осьминога перекрестное расположение мышц обеспечивает все движения. При сокращении продольных мышц рука становится короче и толще; когда поперечные мышцы сокращаются, рука становится длиннее и тоньше.
У осьминога нет ни внутреннего, ни внешнего скелета, а его восемь конечностей могут сгибаться в любой точке, удлиняться и укорачиваться, а также напрягаться для приложения силы. Он может обвивать руками объекты и манипулировать ими с большой ловкостью, что продемонстрировано во множестве развлекательных видеороликов на YouTube, в том числе в одном, где животное крадет камеру у подводного фотографа, и в другом, где оно высвобождается из банки, отвинчивая крышку от крышки. внутри. Такая ловкость нужна осьминогу, чтобы выжить в дикой природе. Например, когда он ползает по морскому дну, его руки должны координировать свои движения в сложной последовательности волн, чтобы толкать и тянуть свое тело вперед.
Он может обвивать руками объекты и манипулировать ими с большой ловкостью, что продемонстрировано во множестве развлекательных видеороликов на YouTube, в том числе в одном, где животное крадет камеру у подводного фотографа, и в другом, где оно высвобождается из банки, отвинчивая крышку от крышки. внутри. Такая ловкость нужна осьминогу, чтобы выжить в дикой природе. Например, когда он ползает по морскому дну, его руки должны координировать свои движения в сложной последовательности волн, чтобы толкать и тянуть свое тело вперед.
Мы хотели создать робота, который мог бы повторять эти маневренные движения. Мы начали с изучения гидростатической структуры мышц руки осьминога, которая позволяет общему объему руки оставаться постоянным, в то время как отдельные мышцы сокращаются и меняют форму. Так, когда диаметр руки уменьшается, ее длина увеличивается, и наоборот. Чтобы перевести биологию в инженерию, мы работали с морскими биологами, чтобы измерить руки осьминога и создать компьютерные модели, которые могли бы использоваться в наших проектах. Затем мы начали экспериментировать с мягкими приводами, которые могли имитировать мышцы животного.
Затем мы начали экспериментировать с мягкими приводами, которые могли имитировать мышцы животного.
Одним из вариантов было создание искусственных мышц с использованием материалов, известных как электроактивные полимеры (EAP). Слой мягкого материала зажат между двумя электродами; при подаче напряжения ЭАП действует как конденсатор, и электроды сближаются, сжимая мягкий материал между собой. Используя это явление, исследователи создали сократительные единицы, которые могут быть расположены стопками для создания значительных сил. Исследовательская сеть в Европе активно разрабатывает EAP для искусственных мышц.
Другая возможность состояла в том, чтобы сконструировать наши роботизированные руки с использованием гидравлических приводов, в которых жидкости или газы заполняют мягкие камеры, чтобы изменить форму более крупной конструкции. Продуманный дизайн форм и расположение отсеков позволяют манипулятору изгибаться в нужных направлениях и в конечном итоге могут выполнять более сложные движения.
Еще один интересный подход основан на заполнении камеры гранулированным материалом, таким как песок или даже молотый кофе, вместо жидкости. С помощью этой техники, называемой заклиниванием, мягкий робот остается гибким до тех пор, пока не будет применен вакуум. Затем тело робота напрягается, принимая твердую форму, как кофе в вакуумной упаковке на полке в продуктовом магазине. Применяя вакуум к дискретным секциям в запрограммированных последовательностях, исследователи могут заставить мягких роботов напрягаться и двигаться определенным образом.
Приводы октобота имитируют мышцы настоящих осьминогов. Gif: The BioRobotics Institute/Scuola Superiore Sant’Anna
Моя команда больше всего интересовалась созданием искусственных мышц с использованием материалов, называемых сплавами с памятью формы (SMA). При нагревании SMA деформируются до заданной формы, которую они «запоминают».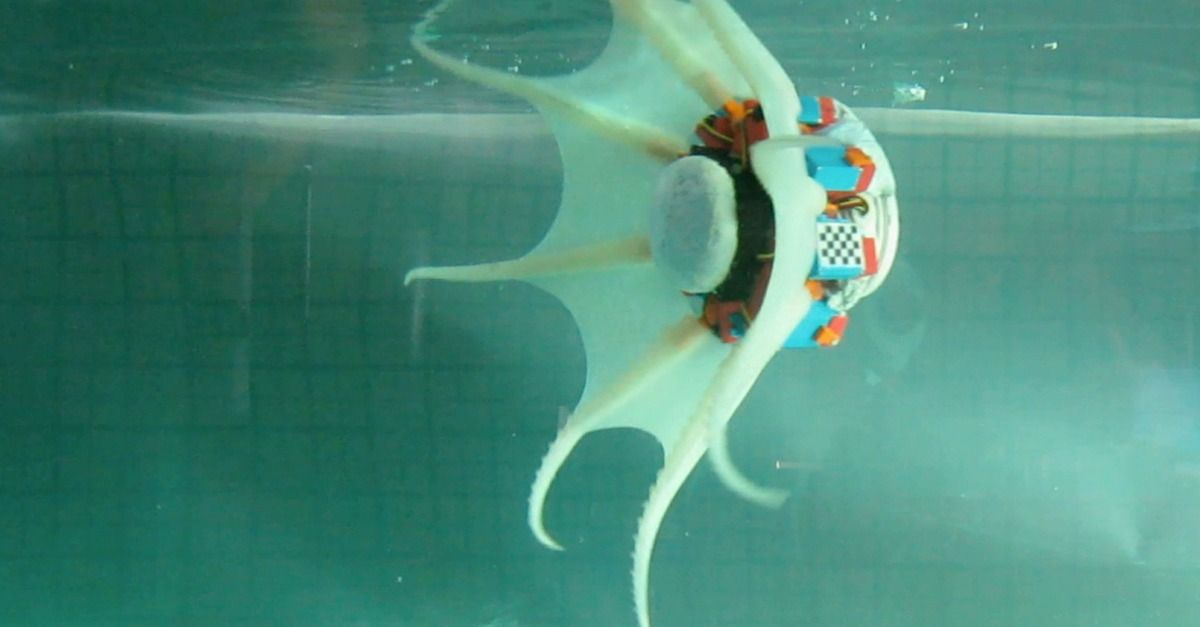 Мы превратили провода SMA в пружины и пропустили через них электрический ток, чтобы нагреть их, заставив пружины сжаться, имитируя мышечные сокращения. Для проекта Octopus моя команда сконструировала прототип руки, используя пружины SMA, чтобы заменить продольные и поперечные мышцы конечностей настоящего осьминога. Направляя ток через различные наборы пружин, мы заставили подводную руку изгибаться в нескольких точках, укорачиваться и удлиняться, даже захватывать предметы.
Мы превратили провода SMA в пружины и пропустили через них электрический ток, чтобы нагреть их, заставив пружины сжаться, имитируя мышечные сокращения. Для проекта Octopus моя команда сконструировала прототип руки, используя пружины SMA, чтобы заменить продольные и поперечные мышцы конечностей настоящего осьминога. Направляя ток через различные наборы пружин, мы заставили подводную руку изгибаться в нескольких точках, укорачиваться и удлиняться, даже захватывать предметы.
Наша работа в первую очередь предназначена для демонстрации потенциала мягкой робототехники, и предстоит еще много работы, прежде чем робот-осьминог будет готов выползти из лаборатории. Например, бот с датчиками на конечностях может обеспечивать обратную связь о своем положении и материалах, с которыми он сталкивается, что может привести к более эффективным стратегиям управления. Группа исследователей из Вустерского политехнического института в Массачусетсе решает именно эту проблему, встраивая проприоцептивные датчики в роботизированную змею [pdf].
Забавно представить, как продвинутый робот-осьминог с восемью ловкими руками может действовать в дикой природе. Возьмите морскую энергетику, где есть большой интерес к размещению приливных турбин на морском дне для получения энергии из текущей воды. Но если оборудование сломается, ремонт будет трудным и дорогим: рабочим придется либо поднимать турбины на поверхность, либо отправлять водолазов вниз. Возможно, однажды вместо него можно будет послать техника-октобота. Благодаря своим подвижным конечностям он мог манипулировать инструментами и чинить все, что сломано.
Мы, робототехники, интересуемся осьминогом не только из-за его конечностей и мускулов — мы также ценим его особую разновидность интеллекта. Мозг осьминога и периферическая нервная система хорошо развиты по сравнению с другими моллюсками, но они все еще довольно ограничены. Удивительно, что они могут контролировать огромный диапазон движений восьми независимых рук. Итак, нашей следующей задачей в рамках проекта «Осьминог» было изучение того, как животное управляет своими руками. Мы надеялись, что результаты помогут нам найти способы управления сложными движениями гибкого робота.
Мы надеялись, что результаты помогут нам найти способы управления сложными движениями гибкого робота.
Биологи установили, что мозг осьминога не отдает нисходящие команды при каждом незначительном движении своих изогнутых конечностей. У обыкновенного осьминога Octopus vulgaris мозг на самом деле содержит гораздо меньше нейронов, чем периферическая нервная система. Биологи считают, что мозг инициирует движения, а нижние двигательные центры контролируют точную нервно-мышечную активность. Эксперименты показали, что даже если перерезать нервы, идущие от мозга осьминога, его руки все равно могут отскакивать от неприятных раздражителей и тянуться, как будто что-то хватая.
И вот что мы обнаружили еще более интересным: конечностям осьминога не нужны исчерпывающие указания для выполнения желаемого движения. Благодаря миллионам лет эволюции их тела устроены таким образом, чтобы реагировать на окружающую среду определенным автоматическим и полезным образом. Эту концепцию робототехники часто называют морфологическими вычислениями [pdf], а исследователи искусственного интеллекта называют ее воплощенным интеллектом.
В переводе на мир роботов [pdf] этот принцип означает, что мы должны проектировать наших роботов таким образом, чтобы физические свойства их тел автоматически вызывали желаемые движения. С помощью этой стратегии чрезвычайно простые команды могут заставить робота эффективно выполнять сложные задачи.
Мы помнили об этом принципе, когда впервые решили создать робота-осьминога, который мог бы ползать по морскому дну [pdf]. Мы изучили стратегию передвижения настоящего животного и определили, что оно использует четырехступенчатую процедуру для ползания. Сначала он прикрепляет ко дну одну из своих задних конечностей, покрытых присосками. Затем он удлиняет эту конечность, чтобы подтолкнуть остальную часть тела вперед. На третьем этапе он подтягивает свои присоски, чтобы отделить конечность от морского дна. И, наконец, он укорачивает конечность, чтобы приблизить ее к телу и подготовиться к следующему толчку. Животное колеблется вперед, когда две его руки выполняют эти действия в грациозной последовательности.
Чтобы имитировать эту форму передвижения, может показаться, что нашему октоботу потребуется выполнить огромное количество вычислений, чтобы управлять своими восемью руками, каждая из которых может сгибаться в любой точке. В типичном роботе для каждой степени свободы конечности требуется привод, управляющий движением в этом направлении, и некий числовой контроллер для управления приводом. Но у наших роботов-манипуляторов было слишком много степеней свободы, чтобы применить обычную стратегию управления.
Мы решили последовать примеру эволюции и попробовать создать руки, не требующие сложных управляющих воздействий. Прежде чем что-либо построить, мы сформулировали математические модели для проверки различных аспектов конструкции руки, включая плотность используемого материала, ее жесткость, ее форму, внутреннее расположение искусственных мышц и так далее. Все эти параметры необходимо было изучить в контексте того, как оружие будет работать под водой. Как поведет себя это оружие в воде разной солености и температуры? Как на них повлияет увеличение глубины и давления? Как течения и турбулентность повлияют на их движение? Чтобы ответить на эти вопросы, мы добавили в наши модели гидродинамические факторы. Мы также должны были учитывать текстуру и состав поверхностей, по которым они будут ползать. Мы решили не усложнять нашу конструкцию, добавляя присоски к рычагам, вместо этого используя материал для внешней стороны, который будет создавать большое трение.
Как поведет себя это оружие в воде разной солености и температуры? Как на них повлияет увеличение глубины и давления? Как течения и турбулентность повлияют на их движение? Чтобы ответить на эти вопросы, мы добавили в наши модели гидродинамические факторы. Мы также должны были учитывать текстуру и состав поверхностей, по которым они будут ползать. Мы решили не усложнять нашу конструкцию, добавляя присоски к рычагам, вместо этого используя материал для внешней стороны, который будет создавать большое трение.
Со всеми этими параметрами в модели задача поиска оптимальной комбинации стала слишком сложной, чтобы ее можно было вычислить методом проб и ошибок, поэтому мы использовали эволюционный алгоритм, чтобы изучить широкий диапазон возможностей. Этот алгоритм начался с создания множества гипотетических форм тела осьминога, каждая со своим набором характеристик. Затем он протестировал руки этих осьминогов, чтобы увидеть, какие из них лучше всего работают в моделях, и использовал атрибуты «самых приспособленных» конечностей, чтобы вдохновить на новую партию возможностей. Таким образом, мы определили устройство, которое будет генерировать правильное количество движущей силы и производить желаемое ползучее движение.
Таким образом, мы определили устройство, которое будет генерировать правильное количество движущей силы и производить желаемое ползучее движение.
Результаты были очень обнадеживающими: в частности, оказалось просто управлять октоботом, и мы могли имитировать четырехступенчатое ползание, которое наблюдали у настоящего животного. Для этого прототипа, предназначенного для демонстрации механизмов управления, а не материалов, мы заменили SMA и вместо них использовали кабели в качестве искусственных мышц. Каждая рука из силиконовой резины содержала стальной трос, который удлинял или укорачивал руку, и трос из углеродного волокна, который сгибал руку для присоединения и отсоединения (а также позволял роботу захватывать предметы). Один простой серводвигатель в каждой руке обеспечивал питание.
Во время проектирования было выполнено огромное количество сложных вычислений. Но когда робот был в действии, мы с гордостью говорили, что он очень тупой: у него был только простой «мозг» или микроконтроллер, который приводил в действие руки в правильной последовательности, чтобы заставить октобота ползти благодаря механическим свойствам. своего тела. Наш октобот продемонстрировал морфологические вычисления в действии.
своего тела. Наш октобот продемонстрировал морфологические вычисления в действии.
В 2012 году моя команда в Институте биоробототехники начала родственный проект под названием PoseiDrone. Для этого проекта мы решили применить все, чему научились, для создания мягкого подводного робота, который мог бы не только ползать и хватать объекты, но и плавать.
Мы разработали реактивную двигательную установку для октобота. Gif: The BioRobotics Institute/Scuola Superiore Sant’Anna
Чтобы наделить этого робота плавательными способностями, мы снова полагались на морфологические вычисления. Ключевым моментом была конструкция мантии октобота — похожей на голову части осьминога, которая раздувается, когда наполняется водой, а затем сжимается, чтобы вытолкнуть воду и создать реактивную тягу. Опять же, мы использовали компьютерные модели, чтобы определить размер, форму и свойства материала силиконовой оболочки, обращая особое внимание на то, как структура будет деформироваться при выбросе воды. Наш алгоритм создал оптимальную комбинацию, которая с помощью всего лишь одного небольшого мотора и нескольких простых кабелей отправила октобота в воду.
Наш алгоритм создал оптимальную комбинацию, которая с помощью всего лишь одного небольшого мотора и нескольких простых кабелей отправила октобота в воду.
Октобот ползает по воде. Gif: The BioRobotics Institute/Scuola Superiore Sant’Anna
С помощью нашего прототипа PoseiDrone мы изучили его способность выполнять различные задачи, такие как ползание во время переноски объекта и движение с серией рывков во время плавания. Этот прототип был ботом, которого мы бросили в Средиземное море, чтобы посмотреть, как он поведет себя на открытом воздухе. Мы с гордостью наблюдали за тем, как наш робот умело справляется с непредсказуемыми поверхностями, волнами и течениями, с которыми он сталкивался, и по завершении наших экспериментов мы нашли подходящее решение для этого образцового образца. Робот PoseiDrone скоро будет жить в аквариуме Ливорно, Италия, рядом с настоящим осьминогом.
Видео: Посмотрите, как осьминобот ползает, цепляется и плавает.
Сесилия Ласки — профессор биоробототехники Высшей школы Святой Анны в Пизе, Италия.
Программное обеспечение для программирования и моделирования роботов | Автономная роботизированная программа | OLRP
Программное обеспечение для программирования и моделирования роботов | Автономная роботизированная программа | ОЛРП | ОКТОПУЗ
Автономное программирование роботов
держит промышленных роботов в сети и работает на вас
Учить больше
Автономное программирование роботов (OLRP) меняет способ программирования, развертывания и перепрограммирования своих роботов интеграторами и производителями. За счет программирования функций роботов в виртуальной автономной среде (на компьютере) OLRP устраняет необходимость вывода роботов из производства, что значительно повышает производительность и прибыль.
Увеличение рентабельности инвестиций в роботов
Сокращение простоев производства
Проверка роботизированных процессов с помощью моделирования
OLRP устраняет традиционные ограничения автоматизации роботов
 vimeo.com/video/688557475/» allowfullscreen=»»>
vimeo.com/video/688557475/» allowfullscreen=»»>
Максимизируйте инвестиции в промышленных роботов с помощью OCTOPUZ
OCTOPUZ — это интеллектуальное автономное программное обеспечение для программирования роботов, которое позволяет программировать чувствительные к траектории сложные приложения для роботов без прерывания производственного процесса и без необходимости присутствия эксперта по программированию роботов на месте.
OCTOPUZ имеет возможность программировать несколько брендов, конфигураций и приложений роботов вместе в виртуальной автономной среде и выводить код для использования в реальных сотовых приложениях.
С программным обеспечением для автономного программирования роботов OCTOPUZ компании могут:
Упрощение программирования сложных роботов
Автоматическое обнаружение ошибок и предотвращение их
ЧТО НОВОГО В OCTOPUZ
УЗНАЙТЕ О OCTOPUZ
OCTOPUZ поддерживает самый большой выбор торговых марок промышленных роботов
С OCTOPUZ вы можете
Программировать роботов в виртуальном мире и выводить код для использования в реальном мире
Посмотреть больше симуляций
Экономия времени и денег интеграторов и производителей
О OCTOPUZ
Независимо от того, проектируете ли вы роботизированную ячейку для клиента или имеете штатного программиста на своем производственном предприятии, программное обеспечение OCTOPUZ для автономного программирования роботов позволяет предприятиям оптимизировать операции и делать больше со своими роботами.
Интеграторы
В качестве инструмента продаж OCTOPUZ упрощает предоставление доказательства концепции использования робота в ячейке. Интеграторы могут использовать OCTOPUZ для проектирования ячейки и демонстрации клиентам, как инвестиции в роботов будут работать на их предприятии. Благодаря возможностям виртуальной реальности клиенты могут пройтись по своей новой роботизированной системе в натуральную величину и ощутить весь потенциал роботизированной автоматизации.
Производители
OCTOPUZ предоставляет виртуальную автономную среду, которая идеально соответствует вашей реальной ячейке и позволяет выполнять такие задачи, как обучение, программирование и интеграция, с минимальными перерывами в производстве. Время, необходимое для внедрения новых программ, может быть сокращено с нескольких недель до одного дня, что позволяет роботизировать мелкосерийное производство.
Заказать демо
Программное обеспечение для автономного программирования роботов OCTOPUZ широко используется в различных отраслях
Сварка
Резка
Моделирование
Добавка
Обработка
Опрыскивание
Компании, использующие OCTOPUZ OLRP
Ресурсы и события
Посмотреть OCTOPUZ в действии
Моделирование
Обзор возможностей OCTOPUZ: быстрое создание контуров с помощью автоматического объединения краев
Создавайте пути, следующие за несколькими ребрами, со значительно улучшенным выбором ребер и совершенно новыми инструментами для автоматического связывания вашего пути вместе.