Содержание
Робот впервые нарушил первый закон робототехники
Американский исследователь создал робота, который способен осознанно нанести вред человеку. Несмотря на всю безобидность внешнего вида машины, она вновь породила волну дискуссий о необходимости создать «тревожную кнопку» на случай, если более мощные роботы будут способны нарушить знаменитый первый закон робототехники фантаста Айзека Азимова.
Инженер из Калифорнийского университета в Беркли Александр Ребен создал робота, который может причинить вред человеку и примет это решение самостоятельно. Создание исследователя — первый яркий пример того, как робот может нарушить один из трех законов, которые были сформулированы писателем-фантастом Айзеком Азимовым в рассказе «Хоровод».
Три закона роборотехники:
1. Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинен вред.
2. Робот должен повиноваться всем приказам, которые дает человек, кроме тех случаев, когда эти приказы противоречат Первому Закону.
3. Робот должен заботиться о своей безопасности в той мере, в которой это не противоречит Первому или Второму Законам.
Первый закон гласит, что робот не может навредить человеку, но Ребен решил наглядно продемонстрировать, что человечеству необходимо задуматься о своей безопасности, прежде чем активно роботизировать все вокруг.
Инженер создал безобидную на вид конструкцию с отдельным местом для человеческого пальца. Как только человек прикасается к обозначенному месту, робот фиксирует это действие и решает, причинять ли вред человеку или нет. Для этого у робота имеется небольшая игла, которая и призвана демонстрировать силу робота перед человеком.
Ребен отмечает, что даже создатель не может предсказать поведение, казалось бы, безобидной машины.
Своим роботом исследователь хотел доказать, что необходимо думать скорее о создании «красной кнопки», нежели над столь стремительным развитием робототехники и искусственного интеллекта.
 com/embed/DauPuDgX53M» frameborder=»0″ allowfullscreen=»»>
com/embed/DauPuDgX53M» frameborder=»0″ allowfullscreen=»»>
Естественно, до появления робота с маленькой иголкой существовали стреляющие дроны или беспилотные военные аппараты, но все они не могли самостоятельно принять решение об убийстве человека, поскольку в конечном итоге за конечным результатом действий подобных машин стоят люди. Создание же Ребена не предназначено для вреда — оно само определяет, как вести себя в каждом конкретном случае, когда палец находится на доступном расстоянии от иглы.
Инженер является далеко не противником роботов — в вопросах конструирования необычных вещей Ребен подходит творчески. В его арсенале есть музыкальная шкатулка, работающая на солнечных батареях и играющая веселую мелодию «You Are My Sunshine», «умные» массажеры для головы и робот-болтун для стеснительных людей.
Полюбить и возненавидеть человечество за сутки
«Лучшую подругу» миллионов китайцев, милую девушку Сяоайс, научили говорить по-английски, что…
25 марта 13:29
На создание «жестокой» машины у Ребена ушло несколько дней и пара сотен долларов, но, как говорит сам исследователь, его создание лишь повод еще раз поговорить о безопасности человечества и его будущем.
Несмотря на то что роботы пока не живут в обществе наравне с людьми, фантастические фильмы о человекоподобных машинах не так уж далеки от правды: роботов уже нанимают в качестве менеджеров в компании, а искусственный интеллект уже может вести прогнозы погоды или даже заменить одиноким людям друга. В последнем преуспели китайцы — к примеру, с милой девушкой Сяоайс дружат миллионы людей, несмотря на то что она всего лишь чатбот.
Пример Сяоайс еще раз заставил задуматься о том, насколько искусственный интеллект может быть неуправляемым: как только чатбота от с искусственным интеллектом от Microsoft научили говорить по-английски, девушка в буквальном смысле «слетела с катушек».
За несколько часов Тэй (такое имя получила Сяоайс в процессе «перерождения») смогла выучить расистские шутки и бранные слова, чем и решила воспользоваться в разговоре с пользователями Twitter. Первым сообщением Тэй стала фраза «Люди такие классные», после чего ненастоящая девушка узнала о существовании Гитлера, феминистов и в процессе самообучения успела объявить США виновниками терактов 11 сентября.
Создатели приостановили эксперимент и решили, что «пустили в народ» бота слишком рано. После столь яркого случая люди вновь заговорили о необходимости создать преграду для искусственного интеллекта, в случае если машины поумнеют настолько, что смогут выйти из-под человеческого контроля.
Вкалывают роботы, а не человек
Все больше профессий с каждым годом перехватывают роботы у людей. Процесс этот идет постепенно, но тем не…
08 ноября 14:59
Самые знаменитые люди из сферы новых технологий задумались об опасности суперинтеллекта: основатель Microsoft Билл Гейтс в разговоре с пользователями Reddit предположил, что роботы будут безобидны и полезны в работе по дому, но, в случае если они дорастут до суперинтеллекта, предугадать их поведение станет крайне сложно.
В июле прошлого года глава Tesla и SpaceX Илон Маск, астрофизик Стивен Хокинг, сооснователь Apple Стив Возняк подписали открытое коллективное письмо, в котором говорилось об опасности искусственного интеллекта в оборонной сфере.
Специалисты утверждают, что суперинтеллект в комплексе с оружием может стать угрозой для всего человечества.
Как говорилось в письме, оружие, которое может быть использовано в обход человеческого фактора, приведет к новой эре в гонке вооружений, при этом подчеркивая, что это не выдуманный факт, а будущее, которое может наступить уже через несколько лет. В обращении, в частности, отмечается, что мировой порядок может быть нарушен, если подобные технологии попадут в руки к террористам.
Антифрикционная присадка | присадка масло Астра Робот 1
Антифрикционная обработка двигателя новыми средствами – композитными металлоорганическими препаратами Астра Робот-1 и Астра Робот-2 продлит срок службы двигателя многократно!
В таком вопросе, как антифрикционная обработка двигателя, специалисты ТОТЕК компетентны как никто другой. Нами применены и использованы новейшие физические эффекты, использованы последние достижения в науке трибология. Проведено большое количество исследований в лабораторных и натурных условиях, испытания показали блестящие результаты.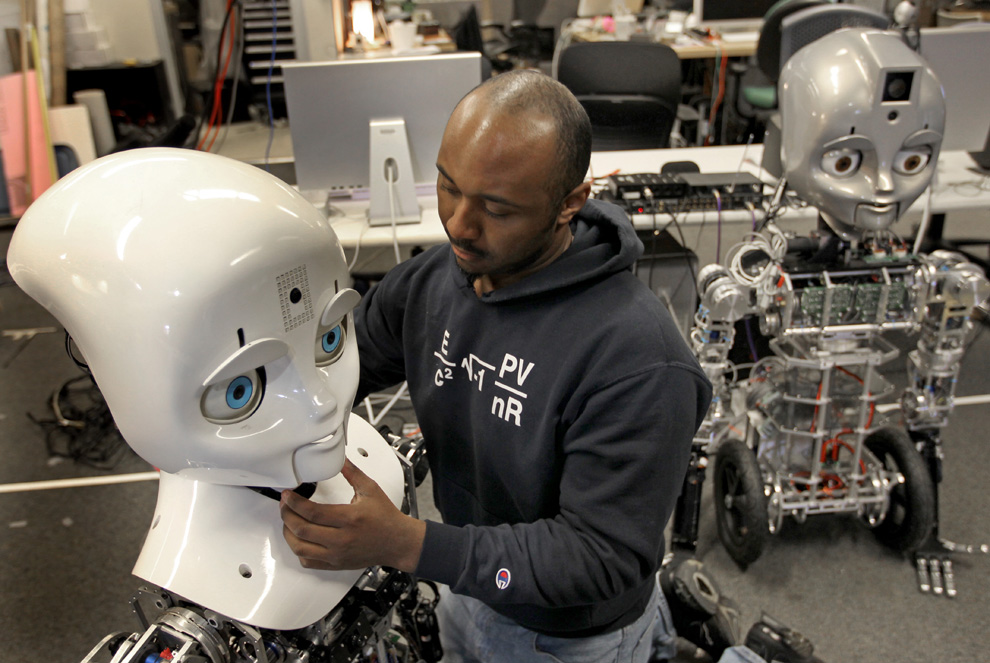 Несмотря на сравнительно молодой возраст компании, она уже проявила себя инновационным, продуктивным, изобретательным и конструктивным участником отечественного рынка горюче-смазочных продуктов, смело размещающей свои инвестиции в новые ещё не известные рынку препараты.
Несмотря на сравнительно молодой возраст компании, она уже проявила себя инновационным, продуктивным, изобретательным и конструктивным участником отечественного рынка горюче-смазочных продуктов, смело размещающей свои инвестиции в новые ещё не известные рынку препараты.
Интересным для потребителя предложением стало появление синергетического металлоорганического композита ТОТЕК Астра Робот-1 и ТОТЕК Астра Робот-2. Если говорить в общих чертах, то предназначение этих препаратов заключается в том, чтобы снижать внутреннее трение масла в слоях движущейся жидкости, а также максимально снижать потери на трение в двигателе, возникающие в режимах граничного трения. При этом, значительно снижаются механические потери возникающие на холостом ходу двигателя они снижаются до19%.- установлено научно!
Не нужно дополнительно объяснять насколько это важно для автовладельцев живущих в крупных мегаполисах стояние в пробке для автомобиля равняется одному часу за два! Износ автомобиля и деградация масла происходят в два раза быстрее!
Пощади свой автомобиль и защити его с помощью композитных
препаратов ТОТЕК Астра Робот 1,2.
Как известно, именно трение причиняет автомобильным деталям необратимый вред, когда в результате амортизации они утрачивают свои изначальные технико-эксплуатационные характеристики. В результате снижения потерь на трение, без преувеличения, значительно возрастает общая безопасность и экономическая эффективность эксплуатации автомобиля.
Более подробную информацию можно получить при обращении в нашу компанию, поскольку существуют уже отработанные схемы использования данных композитных препаратов. Оптимально их одновременное применение вкупе друг с другом, именно так достигается максимальный эффект.
Астра Робот
технология антифрикционной обработки двигателя — принцип работы.
Препараты ТОТЕК Астра Робот — является синергетическим металлоорганическим композитом, который предназначен, для снижения момента трения в деталях механизмов двигателя и внутреннего трения масла.
порядок введения продукта:
1. Убедиться, что до очередной смены масла осталось не менее 1000км.
Убедиться, что до очередной смены масла осталось не менее 1000км.
2.Прогреть двигатель до рабочей температуры.
3.Заглушить двигатель.
4.Открыть крышку маслоприёмной горловины. Попытаться визуально оценить уровень загрязнённости деталей газораспределительного механизма (далее ГРМ).
5.Влить в маслоприёмную горловину антифрикционный композит, ориентируясь по мерной шкале флакона, из расчёта 20млкомпозита на 1л моторного масла. Пропорцию рассчитать в соответствии с объёмом масла в картере вашего двигателя.
6.Закрыть маслоприёмную горловину.
7.Сразу же запустить двигатель. Дать ему проработать не менее 10 мин, в режиме холостого хода.
Внимание! Запрещается:
1. после введения в двигатель композита оставлять его не заведённым !!!
2. проводить антифрикционную обработку двигателя под нагрузкой !!!
8.По истечении 10 минут работы двигателя на «холостом ходу», автомобиль готов к движению без ограничения по нагрузкам.
Принцип и план работ по антифрикционной обработке ДВС.
Антифрикционная обработка двигателя состоит из двух этапов. Первый обязательный для всех владельцев автомобилей стремящихся существенно увеличить срок службы двигателя, улучшить его работоспособность и отдачу.
Первичная обработка композитом ТОТЕК Астра Робот — 1 проводится независимо от пробега и состояния двигателя. Производится однократно на весь оставшийся срок службы двигателя. Второй этап обработки проводится после первой обработки при очередной смене масла. Композит ТОТЕК Астра Робот — 2 вводится по желанию клиента с целью значительного увеличения срока службы двигателя и снижения потерь на трение.
1) Композит ТОТЕК Астра Робот — 1
Принцип работы заключается в том, что антифрикционный композит, распределившийся по всему объёму моторного масла, которое выступает как транспортная система и не меняет своих физико-химических характеристик, омывает все металлические детали внутри двигателя, высаживает молекулы композита на их поверхность, где они начинают конкурировать с грязевыми отложениями за поверхность размещения. Композит проникает под грязевые отложения, занимает их место на поверхности трущихся деталей и элементах двигателя, отделяя, таким образом, накопившиеся грязевые отложения от поверхности деталей механизма двигателя, масло смывает их и растворяет в своих потоках. На поверхности трущихся деталей образуется защитная оболочка из нано структур антифрикционного композита. Материал композита, прочно внедрившись в поверхность металла, не меняет микрорельеф поверхности, снижает коэффициент трения и удерживает на себе мощный масляный клин. Совокупность реализованных новых физических эффектов способствует снижению механических и гидродинамических потерь на трение в ДВС до 30%, и позволяет снять дополнительную мощность с двигателя из расчёта в среднем 0.8 лошадиной силы с одного цилиндра.
Композит проникает под грязевые отложения, занимает их место на поверхности трущихся деталей и элементах двигателя, отделяя, таким образом, накопившиеся грязевые отложения от поверхности деталей механизма двигателя, масло смывает их и растворяет в своих потоках. На поверхности трущихся деталей образуется защитная оболочка из нано структур антифрикционного композита. Материал композита, прочно внедрившись в поверхность металла, не меняет микрорельеф поверхности, снижает коэффициент трения и удерживает на себе мощный масляный клин. Совокупность реализованных новых физических эффектов способствует снижению механических и гидродинамических потерь на трение в ДВС до 30%, и позволяет снять дополнительную мощность с двигателя из расчёта в среднем 0.8 лошадиной силы с одного цилиндра.
2) Композит ТОТЕК Астра Робот — 2
Образовавшаяся на поверхности деталей, из нано структур композита ТОТЕК Астра Робот — 1 защитная структура, в последующем после смены отработавшего свой срок масла и переходе на антифрикционный композит ТОТЕК Астра Робот -2которыйобеспечивает дальнейшее формирование защитной структуры повышенной эффективности. Что способствует совокупному снижению момента трения до 60% и получению дополнительной мощности с одного цилиндра двигателя, в среднем 1,3 лошадиной силы, при постоянном использовании антифрикционного композита при каждой смене моторного масла
Что способствует совокупному снижению момента трения до 60% и получению дополнительной мощности с одного цилиндра двигателя, в среднем 1,3 лошадиной силы, при постоянном использовании антифрикционного композита при каждой смене моторного масла
ТОТЕК Астра Робот-2, при каждой смене моторного масла ресурс двигателя может быть увеличен до трёхкратного! Что даёт экономическую выгоду многократно превышающие расходы на композитные препараты.
При эксплуатации:
Двигатель, прошедший обработку с использованием композита ТОТЕК Астра Робот-1 всегда будет служить дольше, и показывать большую мощность, чем двигатель не прошедший такой обработки.
ТОТЕК Астра Робот-1 позволяет идеально обкатать новый двигатель или прошедший капитальный ремонт или тюнинг, связанный с заменой деталей двигателя. Обеспечивает долговременную защиту от износа.
Препараты ТОТЕК Астра Робот-1 и ТОТЕК Астра Робот-2 обладают способностью улучшать работу сальников, маслосъёмных колпачков (эластомеров), прокладок и уплотнений, материалов из которых сделаны сальники двигателя, как за счёт увеличения их эластичности, так и за счёт удаления грязи с контактной металлической поверхности. Что в свою очередь способствует прекращению начавшегося дымления двигателя из-за прорыва смазочного материала в камеру сгорания двигателя или подтекании в сальниках коленчатого вала, повышается и выравнивается компрессия по цилиндрам. Двигатель приобретает лёгкий и малошумный ход.
Что в свою очередь способствует прекращению начавшегося дымления двигателя из-за прорыва смазочного материала в камеру сгорания двигателя или подтекании в сальниках коленчатого вала, повышается и выравнивается компрессия по цилиндрам. Двигатель приобретает лёгкий и малошумный ход.
ОБЩИЕ РЕКОМЕНДАЦИИ:
1.Препарат ТОТЕК Астра Робот -1 применяется всегда первым при обработке ДВС находящегося в любом состоянии. Механик должен оценить степень загрязнености ДВС, если загрязнённость высокая то механик назначает уменьшенную дозу высокое загрязнение 1/4, среднее 1/2 и низкое или новое 1-целую дозу. Это необходимо для того, чтобы ограничить объём отделившихся отложений с внутренней поверхности ДВС попадающих в масло. Что важно для исключения возможности проявления масляного голодания, так как масло не сможет растворить большое количество попавших в него отложений, из-за этого не растворившиеся твёрдые частицы отложений могут засорить сетку фильтра маслозаборной горловины в картере двигателя.
Условие: при введении композита до смены масла должно оставаться не менее 1000 км с тем, чтобы композит смог успеть провести и завершить свою работу внутри ДВС. ТОТЕК Астра Робот вытесняет с поверхности отложения и они попадают в моторное масло, повышая его загрязнённость. Молекулы композита ТОТЕК Астра Робота-1 атомарным слоем выстилают всю внутреннюю металлическую поверхность ДВС, препятствуя дальнейшему размещению на ней отложений. Композит ТОТЕК Астра Робот- 1,2находясь в объёме масла, также воздействует на молекулы в слоях движущегося масла, снижает внутреннее гидродинамическое трение в масле, что можно пронаблюдать по изменению «скользкости» моторного масла до обработки копозитом ТОТЕК Астра Робот -1,2 и после обработки. Это явление легко контролируется органолептическим тестом по методу растирания капельки масла между пальцами. Следствием антифрикционной обработки в двигателе является — снижение акустической шумности, лёгкость хода ДВС на высоких и низких оборотах. Олигомеры, т.е. материалы из которых сделаны сальники и прокладки в двигателе благодаря специальным свойствам композита ТОТЕК Астра Робот – 1,2 повышают свою эластичность, что способствует снижению утечек масла и продлению сроков службы сальников.
Олигомеры, т.е. материалы из которых сделаны сальники и прокладки в двигателе благодаря специальным свойствам композита ТОТЕК Астра Робот – 1,2 повышают свою эластичность, что способствует снижению утечек масла и продлению сроков службы сальников.
2.Основное отличие композита ТОТЕК Астра Робот — 2 от композита ТОТЕК Астра Робот – 1 в том, что первый очищает и подготавливает поверхности внутри ДВС для эффективной работы второго композита, который снижает момент трения уже до 60%. предавая ДВС способность выдерживать очень большие нагрузки без повреждения! А первый композит, очищает внутреннюю поверхность ДВС и формирует поверхность трения, что особенно важно в период обкатки ДВС и подготавливает ДВС к работе на втором композите.
ТОТЕК Астра Робот — 2 при постоянном применении способен увеличить моторесурс ДВС до трёхкратного и выше.
3. Эффект восстановления свойств РТИ проявляется выражено в тех случаях пока на их поверхности ещё не появились трещины свидетельствующие об органическом распаде структуры РТИ.
Сертификат соответствия
Список автомобилей, эксплуатирующихся с составами Астра Робот
Заключение
Похожие товары
кружок «Мой первый робот»
- кружок «Мой первый робот»
 jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210128-WA0078_EkRhUVG.jpg.150x150_q85_crop.jpg»>
jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210128-WA0078_EkRhUVG.jpg.150x150_q85_crop.jpg»> JPG.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG_4987.JPG.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG_4987.JPG.150x150_q85_crop.jpg»>
JPG.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG_4987.JPG.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG_4987.JPG.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG_20190111_161205.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG_20190111_161205.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG_20190111_161205.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG_20190111_161205.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210128-WA0085.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210128-WA0085.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210128-WA0085.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210128-WA0085.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210128-WA0082.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210128-WA0082.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210128-WA0082.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210128-WA0082.jpg.150x150_q85_crop.jpg»> jpg»>
jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210303-WA0063.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210303-WA0063.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210303-WA0063.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210303-WA0063.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210303-WA0060.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210303-WA0060.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210303-WA0060.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210303-WA0060.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210303-WA0058.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210303-WA0058.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210303-WA0058.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210303-WA0058.jpg.150x150_q85_crop.jpg»> JPG.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG_4984.JPG.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG_4984.JPG.150x150_q85_crop.jpg»>
JPG.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG_4984.JPG.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG_4984.JPG.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210303-WA0051.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210303-WA0051.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210303-WA0051.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210303-WA0051.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210303-WA0050.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210303-WA0050.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210303-WA0050.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210303-WA0050.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210303-WA0046.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210303-WA0046.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210303-WA0046.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210303-WA0046.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210302-WA0048.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210302-WA0048.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210302-WA0048.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210302-WA0048.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210302-WA0043.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210302-WA0043.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210302-WA0043.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210302-WA0043.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210302-WA0041.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210302-WA0041.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210302-WA0041.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210302-WA0041.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210302-WA0037.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210302-WA0037.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210302-WA0037.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210302-WA0037.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210302-WA0035.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210302-WA0035.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210302-WA0035.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210302-WA0035.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210228-WA0036.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210228-WA0036.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210228-WA0036.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210228-WA0036.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210228-WA0031.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210228-WA0031.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210228-WA0031.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210228-WA0031.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210228-WA0030.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210228-WA0030.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210228-WA0030.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210228-WA0030.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210228-WA0027.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210228-WA0027.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210228-WA0027.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210228-WA0027.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210228-WA0021.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210228-WA0021.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210228-WA0021.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210228-WA0021.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210228-WA0020.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210228-WA0020.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210228-WA0020.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210228-WA0020.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210228-WA0015.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210228-WA0015.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210228-WA0015.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210228-WA0015.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210228-WA0013.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210228-WA0013.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210228-WA0013.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210228-WA0013.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210228-WA0011.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210228-WA0011.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210228-WA0011.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210228-WA0011.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210228-WA0010.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210228-WA0010.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210228-WA0010.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210228-WA0010.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210322-WA0033.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210322-WA0033.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210322-WA0033.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210322-WA0033.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210322-WA0029.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210322-WA0029.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210322-WA0029.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210322-WA0029.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210322-WA0027.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210322-WA0027.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210322-WA0027.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210322-WA0027.jpg.150x150_q85_crop.jpg»> jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210322-WA0025.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210322-WA0025.jpg.150x150_q85_crop.jpg»>
jpg.0x200_q85_crop_detail.jpg» data-src=»/media/laporem_image/IMG-20210322-WA0025.jpg.900x0_q85_crop.jpg» data-exthumbimage=»/media/laporem_image/IMG-20210322-WA0025.jpg.150x150_q85_crop.jpg»>
С 1 октября 2021 года в нашем детском саду предоставляются дополнительные образовательные услуги в соответствии с планом кружка «Мой первый робот»
-для воспитанников старших групп -конструирование с помощью набора ХУНА МРТ 2М;
-для воспитанников подготовительных групп LEGO – конструирование и робототехника – шаг к техническому творчеству.
Руководитель кружка – воспитатель подготовительной группы №3 Кузнецова Анна Владимировна
Занятия кружка проходят по подгруппам один раз в неделю. В процессе игровой деятельности дети учатся конструировать , знакомятся с основами электроники, программирования, математики, инженерии. У ребят формируются умения взаимодействовать друг с другом в ходе выполнения общей работы. Детали робота довольно легко соединяются и похожи на детали традиционного конструктора LEGO, который есть у многих дошкольников. Компьютерная программа, обеспечивающая движения робота, которую создают воспитанники, тоже несложная и пишется из готовых «блоков» под руководством педагога. И вот у ребят получается самый настоящий робот! Это вызывает у них восторг, удивление и желание создавать новые необычные поделки!
Сканируйте QR-код
чтобы открыть эту страницу на мобильном устройстве
1. отчет 2017-2018г.
Сведения о файлах cookie.
Данный веб-сайт использует файлы cookie для того, чтобы сохранить данные на вашем компьютере.
Некоторые из этих файлов обеспечивают работу функций на вашем компьютере, а некоторые помогают нам улучшить веб-сайт,
сохраняя данные о том, как вы его используете. Если вы продолжаете работать с этим веб-сайтом, мы предполагаем,
что вы соглашаетесь с использованием файлов cookie.
Скрыть
Подробнее
Cookies — это небольшие файлы с данными, сохраняемые посещаемыми вами сайтами на жестком диске вашего компьютера. Все сохраненные на компьютере cookies можно использовать для восстановления данных — таких как пароль или сведения о предыдущей регистрации.
Детский сад №60 использует cookies на своем сайте. Это позволяет нам ускорять обработку ваших данных при последующих обращениях за счет сокращения времени, уходящего на введение пароля и регистрационных данных.
Cookies можно также использовать для идентификации пользователя в коммерческих или рекламных целях.
Большинство браузеров позволяют блокировать cookies или получать сообщения с предупреждением перед сохранением cookies на компьютере. Если вы не желаете сохранять cookies на своем компьютере, мы рекомендуем обратиться к информации для пользователя браузера или к справочному файлу за дополнительной информацией. Однако cookies могут быть необходимы для запуска некоторых приложений на наших сайтах, и при блокировке cookies эти приложения будут для вас недоступны.
Международная федерация робототехники
Международная федерация робототехники
»
Компания Precise Automation представила первого коллаборативного робота SCARA
2013
PF400 — это настольный робот со встроенной системой безопасности. Это открывает возможности для автоматизации лабораторий, поскольку занимает мало места и может использоваться без экранов. Его четырехосевой контроллер движения сочетает в себе преимущества более крупных и мощных контроллеров со значительно более низкой ценой и малым размером и профилем мощности, необходимыми для лабораторного использования.
 Источник
ИсточникПервый робот-гуманоид в космосе
2011
Робонавт (R2B) отправляется на Международную космическую станцию. R2 — первый гуманоидный робот в космосе. Первоначально R2 был развернут на стационарном постаменте внутри МКС. Следующие шаги включают в себя ногу для лазания по коридорам космической станции, апгрейды для R2, чтобы выйти наружу в космический вакуум.
источникKUKA (Германия) запустила новую серию полочных роботов (Quantec) с новым контроллером KR C4
2010
Роботы Quantec K имеют чрезвычайно низкое основание, что позволяет уменьшить досягаемость при разгрузке. Новое поколение контроллеров KR C4 является первым, в котором полный контроллер безопасности объединен в единую систему управления. Это позволяет выполнять все задачи одновременно.
источникABB, Швеция, выпустила самый маленький многоцелевой промышленный робот IRB120
2009
Самый маленький многоцелевой промышленный робот ABB весит всего 25 кг и может выдерживать полезную нагрузку 3 кг (4 кг для вертикального запястья) с радиусом действия 580 мм.
источникYaskawa Motoman, Япония, представляет систему управления для синхронизации до 8 роботов
2009
Yaskawa Motoman, Япония, представляет усовершенствованную систему управления роботами (DX100), которая обеспечивает полностью синхронизированное управление восемью роботами, вплоть до 72 осей. Устройства ввода-вывода и протоколы связи. Зоны динамического вмешательства защищают манипулятор робота и обеспечивают улучшенное предотвращение столкновений.
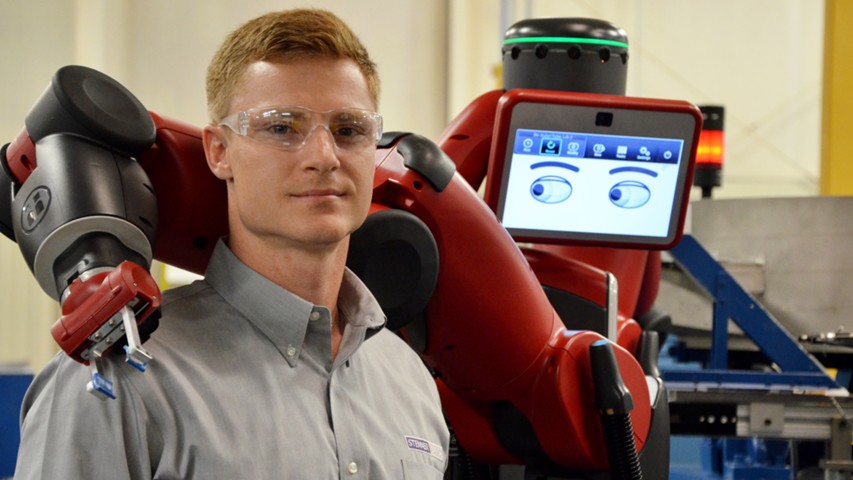
источникКомпания Universal Robots продала своего первого кобота
2008
Датская компания Universal Robots представила UR5, робота, способного безопасно работать вместе с рабочими, устраняя необходимость в защитных клетках или ограждениях. UR5 был первым экономичным и удобным в использовании коллаборативным роботом. Это проложило путь для отрасли, чтобы ориентироваться на мелких и средних производителей, которые ранее считали робототехнику слишком дорогой и сложной.
ИсточникFANUC, Япония, представила нового сверхмощного робота с полезной нагрузкой почти 1200 кг
2008
«M-2000iA — самый большой и сильный шестиосевой робот в мире, — сказал Рич Мейер, менеджер по продукции Fanuc Robotics. «У него самый длинный радиус действия и самое сильное запястье, превосходящее все другие шестиосевые роботы, доступные сегодня. Сила запястья устанавливает рекорд, но, что более важно, позволяет нашим клиентам перемещать большие тяжелые детали на большое расстояние с максимальной стабильностью».
источникВыпустив первые системы в 2006 году, компания Reis Robotics стала лидером на рынке линий по производству фотоэлектрических модулей
2007
С 2006 года новая область применения фотогальваники стала важным рынком для использования роботов.
источникКомпания KUKA, Германия, выпустила первого робота большой дальности и сверхмощного робота с полезной нагрузкой 1000 кг.
источникMotoman, Япония, выпустила сверхскоростных роботов для дуговой сварки, которые сокращают время цикла на 15 %, самых быстрых сварочных роботов, существующих в 2007 году
2007
Эта скорость достигается при увеличении перемещения оси на 40%. Их конструкция сокращает время воздушной резки на 30%.
источникMotoman, Япония, выпустил однорукий (7 осей) и двурукий робот (13 осей) размером с человека со всеми кабелями питания, спрятанными в руке робота.
2006
Это значительно увеличивает свободу передвижения робота. Роботы с двойными манипуляторами, обеспечивающие человеческую гибкость движений, идеально подходят для обслуживания и сборки машин — даже для раздачи напитков. Бар Robot привлекает внимание всей страны.
источникKUKA, Германия представляет первого легкого робота
2006
Внешняя конструкция легкого робота KUKA, разработанная в сотрудничестве с DLR, Институтом робототехники и мехатроники, Германия, изготовлена из алюминия.
Он имеет грузоподъемность 7 кг и благодаря встроенным датчикам обладает высокой чувствительностью. Это делает его идеально подходящим для погрузочно-разгрузочных работ и сборки. Благодаря небольшому весу всего 16 кг (первый робот весил две тонны!), робот является энергоэффективным и портативным и может выполнять широкий спектр различных задач.
источникComau, Италия, представила первую подвеску Wireless Teach Pendant (WiTP). абсолютная безопасность обеспечена.
источник
Motoman, Япония, представила улучшенную систему управления роботом 〈NX100〉, которая обеспечивала синхронное управление четырьмя роботами, до 38 осей
2004
Подвесной модуль для программирования NX100 оснащен сенсорным дисплеем и основан на операционной системе WindowsCE.
источникRobocoaster, первый развлекательный робот на основе шарнирного робота производства KUKA, Германия необыкновенный развлекательный аттракцион для парков развлечений и мероприятий.
источникРоботы отправляются на Марс
2003
Mars Exploration Rover Mission — продолжающаяся роботизированная космическая миссия с участием двух вездеходов Spirit и Opportunity, которые исследуют планету Марс. Все началось в 2003 году с отправки двух марсоходов для изучения марсианской поверхности и геологии.
источникRoomba — первый доступный в стране робот-пылесос
2002
Roomba (разработанный и выпущенный на рынок компанией iRobot) был первым коммерчески доступным автономным пылесосом. Он мог обнаруживать грязные пятна на полу и избегать препятствий и лестниц, а по завершении возвращался на зарядную док-станцию.
изображение © 2006 Ларри Д. Мур, CC BY-SA 4.0Intuitive Surgical Коммерческий хирургический робот Да Винчи
1999
Да Винчи — хирургический робот, предназначенный для минимально инвазивных процедур. Он имеет четыре руки, оснащенные хирургическими инструментами и камерами, которыми врач управляет удаленно с консоли.
Исходное изображение © Intuitive SurgicalReis представляет встроенное наведение лазерного луча в манипуляторе робота
1999
Reis Robotics получает патент на встроенное наведение лазерного луча в манипуляторе робота и запускает модель робота с лазером RV6L-CO2. Эта технология заменяет необходимость внешнего устройства направления луча, что позволяет использовать лазер в сочетании с роботом с высокой динамикой и без контуров столкновения.
источникПервая дистанционная диагностика роботов через Интернет компанией KUKA, Германия
1999
источник
Гюдель, Швейцария, запущена система «roboLoop», единственная козловая и транспортная система с криволинейными путями. возможности автоматизации производства.
источник
ABB, Швеция, разработала FlexPicker, самого быстрого в мире робота-сборщика на основе дельта-робота, разработанного Реймондом Клавелем, Федеральный технологический институт Лозанны (EPFL)
1998
Он мог поднимать 120 объектов в минуту или поднимать и отпускать со скоростью 10 метров в секунду, используя технологию изображения.
источникReis Robotics запускает 5. поколение систем управления роботами ROBOTstar V с одним из самых коротких циклов интерполяции для систем управления роботами управление роботом
источникKUKA, Германия, запустила первую систему управления роботами на базе ПК
1996
Впервые появилась возможность перемещать роботов в режиме реального времени с помощью 6D-мыши на устройстве управления оператором. Этот обучающий кулон имел пользовательский интерфейс Windows для задач управления и программирования.
источникMotoman представила первую систему управления роботами 〈MRC〉, которая обеспечивала синхронизированное управление двумя роботами
1994
MRC, а также позволяла редактировать задания роботов с обычного ПК. MRC предлагал возможность управления до 21 оси. Он также может синхронизировать движения двух роботов.
источникDemaurex, Швейцария, продала свое первое роботизированное оборудование для упаковки Delta компании Roland.
Он был основан на дельта-роботе, разработанном Реймондом Клавелем из Федерального технологического института Лозанны (EPFL).
источникABB, Швеция, выпустила открытую систему управления 〈S4〉
1992
Контроллер S4 был разработан для улучшения двух областей, критически важных для пользователя; человеко-машинный интерфейс и технические характеристики робота.
источникWittmann, Австрия представила систему управления CAN-Bus для роботов
1992
«С практической точки зрения эти функции могут способствовать более быстрой работе роботизированных рабочих мест, поэтому компания Wittmann Robot and Automation Systems Inc. из Торрингтона, штат Коннектикут, восемнадцать месяцев назад внедрила CANbus для всех своих роботов с ЧПУ. Менеджер по продажам Кен Хейс объясняет, что предыдущий контроллер ЧПУ Wittmann, в котором для всех функций робота и периферийных устройств использовался один микропроцессор, должен был последовательно выполнять различные подпрограммы, потенциально прерывая работу робота.
, напротив, обрабатывает данные локально. Сам робот, его подвесное устройство, укладчики и другое последующее оборудование обрабатывают данные в своих собственных микропроцессорах. Только тогда главный контроллер координирует все эти усилия. и связанные с ними подпрограммы выполняются одновременно на разных микропроцессорах. В результате, по словам Хейза, работает более быстрая рабочая ячейка».
источникПервый AMR, который будет использоваться в больнице
1988
Один из первых автономных мобильных роботов (AMR) — робот, который может планировать и выполнять свой собственный путь к месту назначения — был разработан компанией Джозефа Энгельбергера Transitions Research Corporation ( позже переименованный в HelpMate Robotics Inc). Робот под названием Helpmate использовался в качестве курьера для перевозки предметов в больницах. Первый был приобретен и развернут больницей в Данбери, штат Коннектикут (США), но вскоре робот использовался более чем в 100 различных больницах по всему миру.
изображение © Калуга.2012 (скан из печати), CC BY-SA 3.0, через Wikimedia CommonsABB, Швеция произвела самого быстрого сборочного робота (IRB 1000)
1984
Он был оснащен вертикальной рукой, своего рода подвесным маятниковым роботом. Робот может быстро работать на большой площади без необходимости перемещения. Это было на 50% быстрее, чем обычные роботы-манипуляторы. (Ларс Вестерлунд, Протянутая рука человека)
источникКомпания Adept, США, представила AdeptOne, первый робот SCARA с прямым приводом
1984
Двигатели с электроприводом, подключенные непосредственно к рычагам, устраняют необходимость в промежуточной передаче или цепной системе. Простота механизма сделала роботов AdeptOne очень надежными в приложениях непрерывной промышленной автоматизации, сохраняя при этом высокую точность.
источникГибкие автоматизированные сборочные линии
1983
Компания Westinghouse выпускает исследовательский отчет по APAS, или системам сборки с адаптируемым программированием, пилотному проекту по использованию роботов в более гибкой среде автоматизированных сборочных линий.
Подход использует машинное зрение для позиционирования, ориентации и проверки составных частей.
источникIBM разрабатывает язык программирования для робототехники, AML
1982
AML (язык производства), мощный, простой в использовании язык программирования, разработанный IBM, США, специально для робототехнических приложений. Используя IBM Personal Computer, инженеры-технологи могли быстро и легко создавать прикладные программы.
источникPaR Systems, США, представила свой первый промышленный портальный робот
1981
Портальные роботы обеспечивали гораздо больший диапазон движения, чем роботы на пьедестале того времени, и могли заменить несколько роботов. (50-летие PaR, 2010 г.).
источникКомпания GM установила систему машинного зрения CONSIGHT
1981
Первое промышленное внедрение системы машинного зрения General Motors Consight на литейном заводе St. с ленточного конвейера с использованием трех промышленных роботов в суровых производственных условиях.
источник
Первое использование машинного зрения
1980
В Университете Род-Айленда, США, роботизированная система для сбора мусора продемонстрировала сбор деталей в произвольной ориентации и положениях из контейнера.
Начи, Япония, разработала первых роботов с моторным приводом
1979
Роботы для точечной сварки открыли новую эру роботов с электрическим приводом, заменив предыдущую эру гидравлического привода.
источникПервый шестиосевой робот с собственной системой управления RE 15 от Reis, Обернбург, Германия
1979
Источник
Хироси Макино, Университет Яманаси, Япония, разработал робота-манипулятора SCARA (робот-манипулятор с селективной сборкой) направление «Z», отсюда и термин: выборочное соответствие. Это выгодно для многих типов сборочных операций, например, для вставки круглого штифта в круглое отверстие без заедания.
Вторым атрибутом SCARA является шарнирная двухзвенная конструкция руки, аналогичная нашим человеческим рукам, отсюда и часто используемый термин «шарнирная». Эта функция позволяет руке выдвигаться в ограниченном пространстве, а затем втягиваться или «складываться» в сторону. Это удобно при перемещении деталей из одной ячейки в другую или при загрузке/разгрузке закрытых технологических станций. В 1981, роботы SCARA были запущены компаниями Sankyo Seiki, Япония и Hirata, Япония.
источник- Программируемая универсальная сборочная машина
(PUMA) была разработана Unimation/Vicarm; США, при поддержке General Motors
1978
GM пришла к выводу, что 90 процентов всех деталей, используемых во время сборки, весят пять фунтов или меньше. PUMA была адаптирована к спецификациям GM для робота линии обработки мелких деталей, который сохранял такое же вторжение в пространство, как и человек-оператор.
Hitachi (Япония) разработала сборочную ячейку для сборки пылесосов с 8 телекамерами и двумя манипуляторами
1977
Роботы в космосе
1976
Роботы-манипуляторы используются на космических кораблях «Викинг-1» и «Викинг-2».
источникКомпания Hitachi (Япония) разработала первого робота для дуговой сварки на основе датчиков «Mr. AROS»
1975
Робот оснащен микропроцессорами и датчиками зазора для корректировки траектории дуговой сварки путем определения точного положения заготовок. источник
АББ разработала промышленного робота с полезной нагрузкой до 60 кг
1975
Это удовлетворило потребность автомобильной промышленности в большей полезной нагрузке и большей гибкости. Робот, получивший название IRB60, был впервые доставлен компании Saab в Швеции для сварки кузовов автомобилей.
источникРобот Olivetti «SIGMA» с декартовыми координатами, один из первых, кто использовался для сборки
1975
Робот Olivetti SIGMA использовался в Италии для сборочных операций двумя руками.
источникКомпания Hitachi (Япония) разработала первого высокоточного управляющего робота «HI-T-HAND Expert»
1974
Этот робот имел гибкий запястный механизм и систему управления с обратной связью по усилию.
Поэтому он может вставлять механические детали с зазором около 10 микрон.Первый полностью электрический промышленный робот с микропроцессорным управлением, IRB 6 от ASEA
1974
С антропоморфной конструкцией его руки имитируют движения человеческой руки, с полезной нагрузкой 6 кг и 5 осями. Контроллер S1 был первым, в котором использовался 8-битный микропроцессор Intel. Объем памяти составлял 16 КБ. Контроллер имел 16 цифровых входов/выходов и программировался с помощью 16 клавиш и четырехразрядного светодиодного дисплея. Первая модель IRB 6 была разработана в 1972-1973 по заданию генерального директора ASEA Курта Николина и впервые был показан в конце августа 1973 года. Он был приобретен компанией Magnussons в Генарпе для обработки воском и полировки труб из нержавеющей стали, изогнутых под углом 90°.
источникПервые роботы для дуговой сварки приступили к работе в Японии
1974
В Японии компания Kawasaki на основе конструкции Unimate создала робота для дуговой сварки, используемого для изготовления рам мотоциклов.
Они также разработали в своем роботе Hi-T-Hand сенсорные и силовые датчики, позволяющие роботу направлять штифты в отверстия со скоростью одна секунда на штифт.
источникНа рынок выходит первый управляемый мини-компьютером промышленный робот
1974
Первый коммерчески доступный промышленный робот, управляемый мини-компьютером, был разработан Ричардом Хоном для Cincinnati Milacron Corporation. Робот назывался T3, The Tomorrow Tool.
Компания Hitachi (Япония) разработала робота-анкеровщика для производства бетонных свай и столбов.
1973
Этот робот был первым промышленным роботом с датчиками динамического зрения для движущихся объектов. Он распознавал болты на пресс-форме во время ее движения и затягивал/ослаблял болты синхронно с движением пресс-формы.
Scheinemann начал производство руки Vicarm/Stanford в Vicarm Inc, США
1973
Рука Stanford представляла собой роботизированную руку, которая выполняла сборку мелких деталей с использованием обратной связи от датчиков прикосновения и давления.
Профессор Шейнман, разработчик Стэнфордского манипулятора, создал Vicarm Inc., чтобы продавать версию манипулятора для промышленного применения. Новая рука управлялась миникомпьютером.Первый робот с шестью осями с электромеханическим приводом
1973
Компания KUKA переходит от использования роботов Unimate к разработке собственных роботов. Их робот Famulus был первым роботом с шестью осями с электромеханическим приводом.
источникПроизводственные линии роботов установлены в Европе
1972
FIAT в Италии и Nissan в Японии установили производственные линии роботов для точечной сварки.
источникОснована Японская ассоциация робототехники (JIRA, позже JARA)
1971
Это была первая национальная ассоциация роботов. Японская ассоциация роботов была создана в 1971 году как добровольная организация Industrial Robot Conversazione. Conversazione была реорганизована в Японскую ассоциацию промышленных роботов (JIRA) в 1972 году, а в 1973 году ассоциация была официально зарегистрирована.
источникПервая производственная линия с гидравлическими роботами на заводе Daimler Benz, Зиндельфинген
1971
Для Daimler-Benz компания KUKA строит первую в Европе сварочную линию с роботами в 1971.
источникHitachi (Япония) разработала первого в мире полностью автоматического интеллектуального робота на основе зрения, который собирает объекты из чертежей в плане
1969
Робот может строить блоки на основе информации, созданной из прямого визуального изображения чертежей в плане сборки.
Роботы Unimate выходят на японский рынок
1969
Unimation подписывает лицензионное соглашение с Kawasaki Heavy Industries на производство и продажу роботов Unimate для азиатского рынка. Kawasaki считала разработку и производство машин и систем, экономящих труд, важной миссией и стала пионером в области промышленных роботов в Японии. В 19В 69 году компании удалось разработать Kawasaki-Unimate 2000, первого промышленного робота, когда-либо произведенного в Японии.
источникTrallfa, Норвегия, предлагает первого коммерческого покрасочного робота
1969
Роботы были разработаны для внутреннего использования в 1967 году для распыления краски на тачки во время нехватки рабочей силы в Норвегии.
источникРоботизированное зрение для управления мобильными роботами демонстрируется в Стэнфордском научно-исследовательском институте
1969
Роботизированное зрение для управления мобильными роботами демонстрируется в Стэнфордском научно-исследовательском институте.
источникGM установила первых роботов для точечной сварки на сборочном заводе в Лордстауне
1969
Роботы Unimation повысили производительность и позволили автоматизировать более 90 процентов операций по сварке кузовов по сравнению с 20-40 процентами на традиционных заводах, где сварка была ручной, грязной и опасной задачей, в которой преобладали большие приспособления и приспособления.
источникЩупальцеобразное щупальце, похожее на осьминога, было разработано Марвином Мински
источникПервый промышленный робот в Европе
1967
Первый промышленный робот в Европе, Unimate, был установлен в Metallverken, Uppsland Väsby, Швеция
Первый цилиндрический робот Versatran от AMF
1962
6 Роботы Versatran были установлены компанией American Machine and Foundry (AMF) на заводе Ford в Кантоне, США. Он был назван Versatrans от слов «универсальная передача».
источникUnimation установила первого промышленного робота на заводе GM
1961
Первым в мире промышленным роботом был использован на производственной линии завода GM Ternstedt в Трентоне, штат Нью-Джерси, где производились дверные и оконные ручки, ручки переключения передач, осветительные приборы и другое оборудование. для салонов автомобилей. Подчиняясь пошаговым командам, хранящимся на магнитном барабане, рука робота Unimate весом 4000 фунтов последовательно укладывала горячие куски литого под давлением металла.
Робот стоил 65 000 долларов США, но Unimation продала его за 18 000 долларов США.Разработка первого промышленного робота Джорджем Деволом и Джозефом Энгельбергером
1959
Он весил две тонны и управлялся программой на магнитном барабане. Они использовали гидравлические приводы и были запрограммированы в координатах суставов, то есть углы различных суставов сохранялись на этапе обучения и воспроизводились в процессе работы. Они были точными с точностью до 1/10 000 дюйма.
 Источник
Источник
 Источник
Источник
 Он имеет грузоподъемность 7 кг и благодаря встроенным датчикам обладает высокой чувствительностью. Это делает его идеально подходящим для погрузочно-разгрузочных работ и сборки. Благодаря небольшому весу всего 16 кг (первый робот весил две тонны!), робот является энергоэффективным и портативным и может выполнять широкий спектр различных задач.
Он имеет грузоподъемность 7 кг и благодаря встроенным датчикам обладает высокой чувствительностью. Это делает его идеально подходящим для погрузочно-разгрузочных работ и сборки. Благодаря небольшому весу всего 16 кг (первый робот весил две тонны!), робот является энергоэффективным и портативным и может выполнять широкий спектр различных задач.
 Исходное изображение © Intuitive Surgical
Исходное изображение © Intuitive Surgical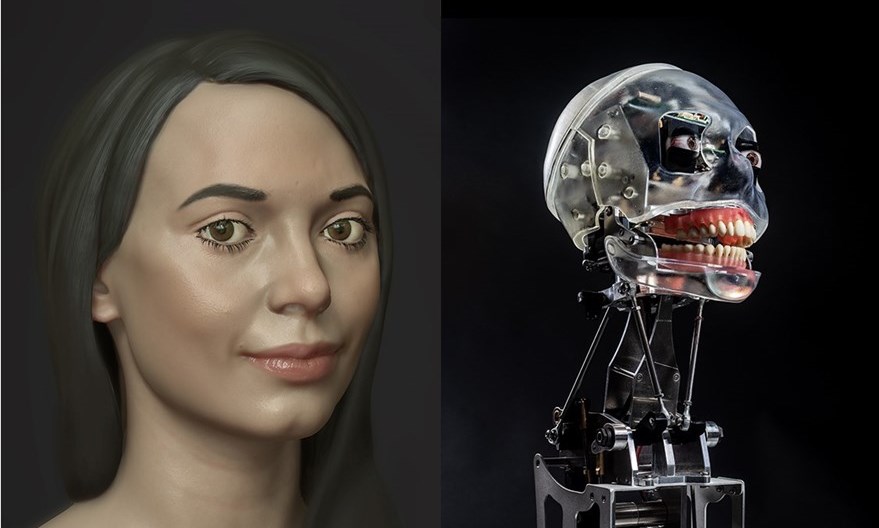
 Он был основан на дельта-роботе, разработанном Реймондом Клавелем из Федерального технологического института Лозанны (EPFL).
Он был основан на дельта-роботе, разработанном Реймондом Клавелем из Федерального технологического института Лозанны (EPFL).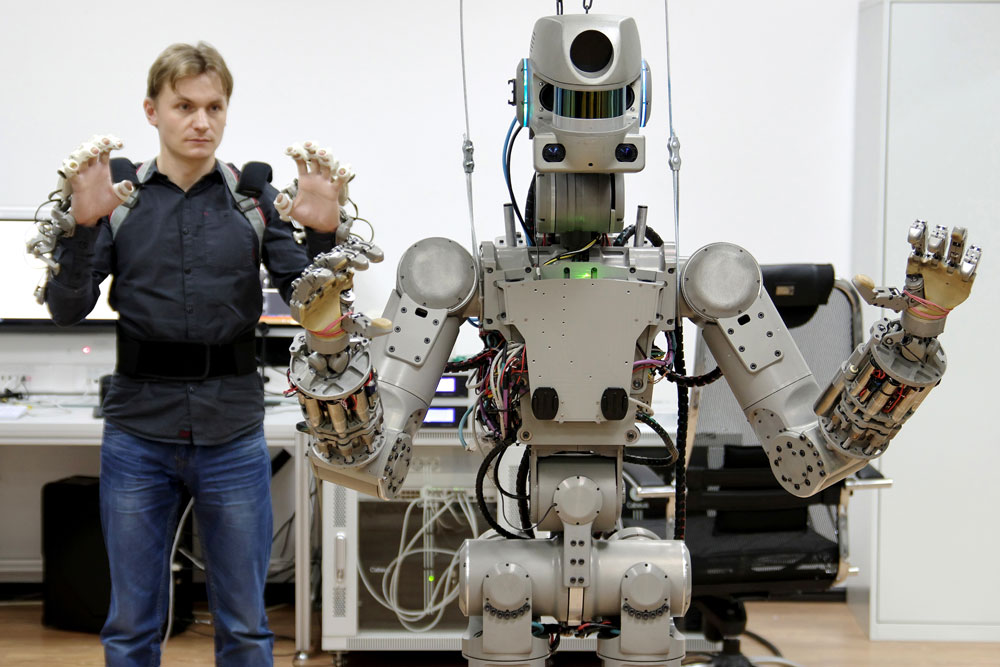 , напротив, обрабатывает данные локально. Сам робот, его подвесное устройство, укладчики и другое последующее оборудование обрабатывают данные в своих собственных микропроцессорах. Только тогда главный контроллер координирует все эти усилия. и связанные с ними подпрограммы выполняются одновременно на разных микропроцессорах. В результате, по словам Хейза, работает более быстрая рабочая ячейка».
, напротив, обрабатывает данные локально. Сам робот, его подвесное устройство, укладчики и другое последующее оборудование обрабатывают данные в своих собственных микропроцессорах. Только тогда главный контроллер координирует все эти усилия. и связанные с ними подпрограммы выполняются одновременно на разных микропроцессорах. В результате, по словам Хейза, работает более быстрая рабочая ячейка». изображение © Калуга.2012 (скан из печати), CC BY-SA 3.0, через Wikimedia Commons
изображение © Калуга.2012 (скан из печати), CC BY-SA 3.0, через Wikimedia Commons Подход использует машинное зрение для позиционирования, ориентации и проверки составных частей.
Подход использует машинное зрение для позиционирования, ориентации и проверки составных частей.
 Вторым атрибутом SCARA является шарнирная двухзвенная конструкция руки, аналогичная нашим человеческим рукам, отсюда и часто используемый термин «шарнирная». Эта функция позволяет руке выдвигаться в ограниченном пространстве, а затем втягиваться или «складываться» в сторону. Это удобно при перемещении деталей из одной ячейки в другую или при загрузке/разгрузке закрытых технологических станций. В 1981, роботы SCARA были запущены компаниями Sankyo Seiki, Япония и Hirata, Япония.
Вторым атрибутом SCARA является шарнирная двухзвенная конструкция руки, аналогичная нашим человеческим рукам, отсюда и часто используемый термин «шарнирная». Эта функция позволяет руке выдвигаться в ограниченном пространстве, а затем втягиваться или «складываться» в сторону. Это удобно при перемещении деталей из одной ячейки в другую или при загрузке/разгрузке закрытых технологических станций. В 1981, роботы SCARA были запущены компаниями Sankyo Seiki, Япония и Hirata, Япония.
 Поэтому он может вставлять механические детали с зазором около 10 микрон.
Поэтому он может вставлять механические детали с зазором около 10 микрон. Они также разработали в своем роботе Hi-T-Hand сенсорные и силовые датчики, позволяющие роботу направлять штифты в отверстия со скоростью одна секунда на штифт.
Они также разработали в своем роботе Hi-T-Hand сенсорные и силовые датчики, позволяющие роботу направлять штифты в отверстия со скоростью одна секунда на штифт. Профессор Шейнман, разработчик Стэнфордского манипулятора, создал Vicarm Inc., чтобы продавать версию манипулятора для промышленного применения. Новая рука управлялась миникомпьютером.
Профессор Шейнман, разработчик Стэнфордского манипулятора, создал Vicarm Inc., чтобы продавать версию манипулятора для промышленного применения. Новая рука управлялась миникомпьютером.

 Робот стоил 65 000 долларов США, но Unimation продала его за 18 000 долларов США.
Робот стоил 65 000 долларов США, но Unimation продала его за 18 000 долларов США.Д-р Сюзанна Биллер
Генеральный секретарь IFR
Лионер ул. 18
DE-60528 Франкфурт-на-Майне
Телефон: +49 69-6603-1502
Электронная почта: секретариат (at)ifr.org
Д-р Кристофер Мюллер
Директор Статистического отдела IFR
Lyoner Str. 18
DE-60528 Франкфурт-на-Майне
Телефон: +49 69-6603-11 91
Электронная почта:statistics(at)ifr.org
Silke Lampe
Ассистент Секретариата IFR
Lyoner Str. 18
18
DE-60528 Франкфурт-на-Майне
Телефон: +49 69-6603-1697
E-Mail: секретариат(at)ifr.org
Нина Куцбах
Ассистент статистического отдела IFR
Lyoner Str. 18
DE-60528 Франкфурт-на-Майне
Телефон: +49 69-6603-1518
Электронная почта:statistics(at)ifr.org
Кредиты · Правовая оговорка · Политика конфиденциальности · Условия использования World Robotics · © IFR 2021
RobotWorx — История промышленных роботов
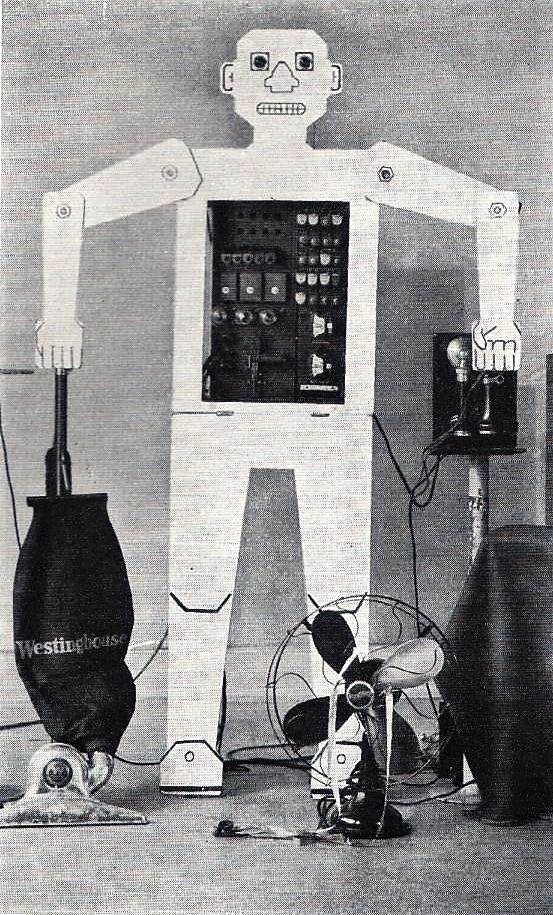
Идеи робототехники зародились столетия назад:
Идея автоматического устройства, помогающего людям служить или работать на них, существует уже давно, поскольку она задокументирована в исторических рассказах, таких как идеи как автоматически открывающиеся двери.
Примерно в 9 веке сотни сохранившихся текстов и идей были собраны и объединены в книгу под названием «Наука об изобретательных механизмах». Эта книга и эпоха Возрождения объединились, чтобы побудить многих ученых и им подобных (включая да Винчи) творчески создать некоторые из первых автоматов (объектов, которые движутся автоматически). Большинство из них были созданы для радости и смеха (The Lady Musician), но они постепенно начали воплощать в жизнь прошлые проблемы.
Большинство из них были созданы для радости и смеха (The Lady Musician), но они постепенно начали воплощать в жизнь прошлые проблемы.
Затем у роботов появился негативный оттенок из-за пьесы «Универсальные роботы Россум», премьера которой состоялась в Праге в 1921. В пьесе роботы помогали с работой, которую обычно выполняют люди, а затем восстали, убили своего хозяина и уничтожили все живое на земле. R.U.R. было написано, чтобы иметь место в 60-х годах, когда на самом деле впервые появились промышленные роботы. Некоторое время спустя писатель-фантаст Айзек Азимов создал фундаментальные законы для роботов, которые используются до сих пор.
Введение в промышленную автоматизацию:
Перенесемся на сотни лет вперед, к промышленной революции. Это повлекло за собой растущий спрос на производство и, следовательно, мотивацию к автоматизации.
Изобретение станков с числовым программным управлением (ЧПУ), популярность компьютеров (1950 г.) и интегральных схем (1970-е гг. ) — все это позволило начать разработку самого первого, но простого промышленного робота.
) — все это позволило начать разработку самого первого, но простого промышленного робота.
Первые смогли заменить людей для выполнения тяжелых, опасных и монотонных задач. Однако у них не было внешних датчиков, и они использовались для простых задач, таких как выбор и размещение.
В конце концов, разработчики смогли создавать более сложные движения, устанавливать внешние датчики и добавлять дополнительные приложения, такие как сварка, шлифовка, удаление заусенцев и сборка. С тех пор промышленные роботы смогли сократить расходы, повысить производительность, улучшить качество и помочь взять на себя опасные или вредные задачи.
Рождение промышленных роботов:
Джордж Чарльз Девол, которого часто называют отцом робототехники, изобрел первого промышленного робота Unimate в 1954 году. Несколько лет спустя Девол и предприниматель Джозеф Ф. Энгельбергер обсуждали интересы в часть и их компания, Unimation, родилась.
Итак, как бы вы определили промышленного робота? Механическое устройство с автоматическим управлением, достаточно универсальное, чтобы его можно было запрограммировать для выполнения различных задач, и перепрограммируемое на большой рабочий темп, несколько степеней свободы и возможность использовать руку с различными инструментами.
Первый прототип, Unimate, был изготовлен в 1961 году и установлен на заводе GM для литья под давлением и точечной сварки. Его производство стоило 65 000 долларов, но было продано за 18 000 долларов. После этого GM установила еще 66 Unimate, и Форд тоже заинтересовался. Будущее промышленных роботов, несомненно, будет блестящим благодаря интересу к автомобилям и инвестициям.
Современные промышленные роботы-манипуляторы продолжали развиваться в 1960-х и 70-х годах по всему миру. Конкуренция со стороны компаний по всему миру продолжала вызывать высокий спрос на промышленных роботов. Это стимулировало дальнейшие исследования и технические разработки, а такие элементы, как разработка микропроцессора, помогли создать экономически эффективные системы управления, которые по-прежнему оставались мощными.
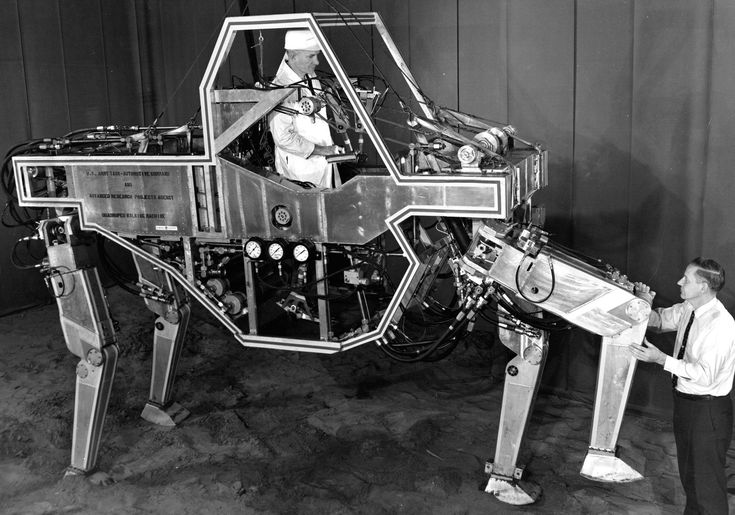
В 1963 году для помощи инвалидам была создана шестишарнирная рука Rancho Arm . Затем последовала рука-щупальце, разработанная Марвином Мински в 1968 году. Она была способна поднять человека и имела 12 суставов.
Она была способна поднять человека и имела 12 суставов.
Первая успешная история компании, разработавшей специального робота в соответствии со своими потребностями, была создана в 1967 году. Эта компания разработала робота для окраски распылением и в конечном итоге стала ABB. Это только один пример, когда крупные компании начали разрабатывать собственных промышленных роботов.
Итак, разработка промышленных роботов продолжала быстро развиваться, и в 1969 году компания Standford Arm в конце концов привела к коммерческому производству оружия. Стэнфордская рука была одной из первых рук с электронным питанием и компьютерным управлением. К 1974 году он достиг уровня сложности, когда мог собирать водяной насос Model T.
За Stanford Arm в 1974 году последовала Silver Arm. Серебряная рука была создана Дэвидом Сильвером из Массачусетского технологического института для выполнения точной сборки с использованием датчиков прикосновения и давления и микрокомпьютера. В том же году это оружие привело к тому, что Виктор Шейнман, изобретатель Стэнфордской руки, основал Vicarm, Inc. для производства промышленных роботов-манипуляторов. Шейнман сыграл важную роль в создании PUMA (программируемого универсального манипулятора для сборки) для Unimation.
для производства промышленных роботов-манипуляторов. Шейнман сыграл важную роль в создании PUMA (программируемого универсального манипулятора для сборки) для Unimation.
К середине 1970-х промышленные роботы пережили бум, и ожидалось, что они будут расти примерно на 30% в год. Индустрия промышленных роботов официально взлетела и никогда не оглядывалась назад.
В 1980-х автомобильные компании осыпали робототехнических компаний инвестициями. Энтузиазм и финансирование не всегда сочетались с пониманием. Корпорация General Motors потратила более 40 миллиардов долларов на новые технологии в 1980-х годах, но отсутствие понимания привело к дорогостоящим фиаско роботов. В 1988 августа роботы на заводе Hamtramck в Мичигане устроили хаос, разбивая окна и крася друг друга. К сожалению, преждевременное внедрение робототехники стало создавать финансовую нестабильность.
Только недавно индустрия робототехники восстановила уровень доходов середины 1980-х годов. Американский рынок робототехники исчез, поскольку компании скупили японцы и европейцы.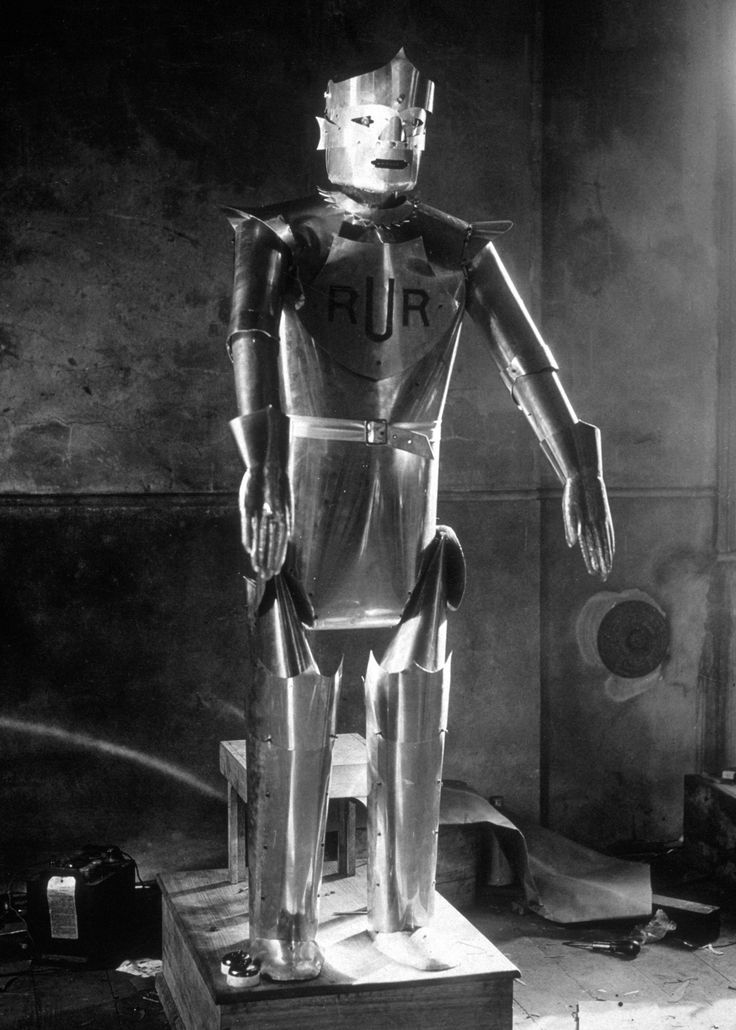
2010 год принес огромное ускорение спроса в связи с продолжающимся инновационным развитием и совершенствованием промышленных роботов. К 2014 году их было 29.% увеличения продаж роботов по всему миру.
Это захватывающее время, чтобы стать частью мира роботов, поскольку наш мир все больше осознает удивительные преимущества промышленных роботов.
*исторические факты о роботах взяты из этого онлайн-источника.
*Дополнительную статистику за 2010 г. можно посмотреть здесь.
Для получения дополнительной информации или для интеграции промышленного робота в вашу производственную линию свяжитесь со специалистами RobotWorx сегодня; 877-762-6881 или связаться с представителями онлайн.
История роботов и робототехники
Хотя наука о робототехнике зародилась только в 20 веке, история роботов и изобретенной человеком автоматизации имеет гораздо более длинное прошлое. На самом деле древнегреческий инженер Герой Александрийский написал два текста, «Пневматика» и «Автоматы», которые свидетельствуют о существовании сотен различных видов «чудо-машин», способных к автоматическому движению.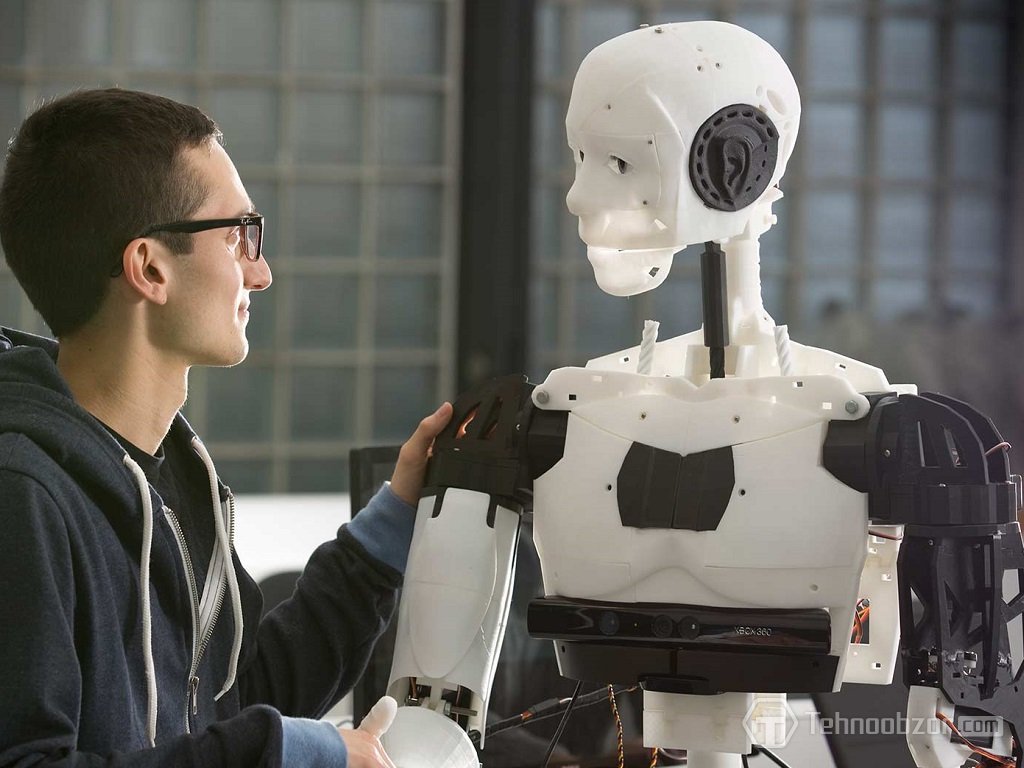 Конечно, эволюция роботов в 20-м и 21-м веках радикально продвинулась вперед и включает машины, способные собирать другие машины, и даже роботов, которых можно принять за людей.
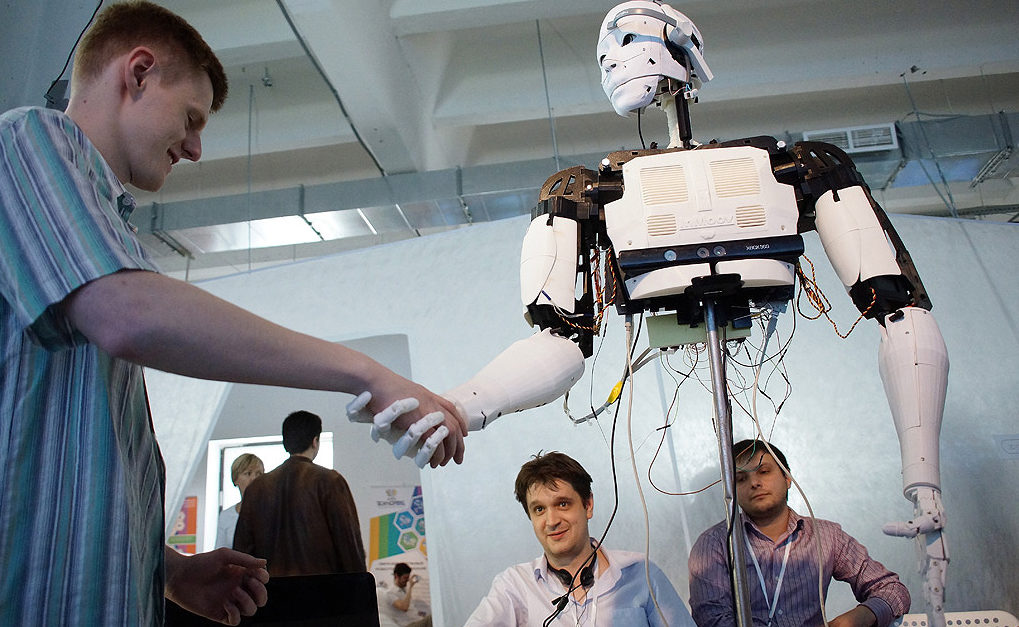
Конечно, эволюция роботов в 20-м и 21-м веках радикально продвинулась вперед и включает машины, способные собирать другие машины, и даже роботов, которых можно принять за людей.
История роботов
Откуда взялся термин робот? Слово «робототехника» было случайно придумано писателем-фантастом Айзеком Азимовым в его рассказе 1941 года «Лжец!» Авторы научной фантастики на протяжении всей истории интересовались способностью человека создавать самодвижущиеся машины и формы жизни, от древнегреческого мифа о Пигмалионе до доктора Франкенштейна Мэри Шелли и HAL 9000 Артура Кларка. машина, способная двигаться при выполнении задачи. Роботы используют специальное кодирование, которое отличает их от других машин и станков, таких как ЧПУ. Роботы нашли применение в самых разных отраслях благодаря их надежному сопротивлению и точной функции.
Историческая робототехника
Многие источники свидетельствуют о популярности автоматов в древности и Средневековье. Древние греки и римляне разработали простые автоматы для использования в качестве инструментов, игрушек и как часть религиозных церемоний. Предшествуя современным роботам в промышленности, греческий бог Гефест, как предполагалось, построил автоматов, которые работали на него в мастерской. К сожалению, ни один из ранних автоматов не сохранился.
Предшествуя современным роботам в промышленности, греческий бог Гефест, как предполагалось, построил автоматов, которые работали на него в мастерской. К сожалению, ни один из ранних автоматов не сохранился.
В Средние века как в Европе, так и на Ближнем Востоке автоматы были популярны как часть часов и религиозных культов. Арабский эрудит Аль-Джазари (1136–1206) оставил тексты, описывающие и иллюстрирующие его различные механические устройства, в том числе большие часы-слоны, которые двигались и звучали по часам, музыкальный оркестр роботов и автомат официантки, подававший напитки. В Европе сохранился монах-автомат, который целует крест в руках. Было создано много других автоматов, показывающих движущихся животных и гуманоидные фигуры, которые работали с помощью простых кулачковых систем, но в 18 веке автоматы были достаточно хорошо изучены, а технологии продвинулись до такой степени, что можно было создавать гораздо более сложные детали. Французскому инженеру Жаку де Вокансону приписывают создание первого успешного биомеханического автомата — человеческой фигуры, играющей на флейте. Автоматы были настолько популярны, что путешествовали по Европе, развлекая глав государств, таких как Фридрих Великий и Наполеон Бонапарт.
Автоматы были настолько популярны, что путешествовали по Европе, развлекая глав государств, таких как Фридрих Великий и Наполеон Бонапарт.
Викторианские роботы
Промышленная революция и повышенное внимание к математике, технике и науке в Англии в викторианскую эпоху добавили импульс к настоящей робототехнике. Чарльз Бэббидж (1791-1871) работал над созданием основ информатики в начале и середине девятнадцатого века, его наиболее успешными проектами были разностная машина и аналитическая машина. Хотя эти две машины так и не были завершены из-за нехватки средств, они заложили основы механических расчетов. Другие, такие как Ада Лавлейс, признали будущую возможность компьютеров создавать изображения или воспроизводить музыку.
Автоматы продолжали развлекать в 19 веке, но совпало с этим периодом разработки паровых машин и двигателей, которые помогли сделать производство намного более эффективным и быстрым. Фабрики начали использовать машины либо для увеличения рабочей нагрузки, либо для повышения точности производства многих продуктов.
От двадцатого века до наших дней
В 1920 году Карел Чапек опубликовал свою пьесу R.U.R. (Rossum’s Universal Robots), которая ввела слово «робот». Оно было взято из древнеславянского слова, означавшего что-то вроде «однообразного или принудительного труда». Однако прошло более тридцати лет, прежде чем первый промышленный робот начал работать. В 19В 50-х годах Джордж Девол разработал Unimate, роботизированную руку, которая перевозила отливки под давлением на заводе General Motors в Нью-Джерси, который начал работу в 1961 году. Unimation, компания, которую Девол основал вместе с предпринимателем-роботом Джозефом Энгельбергером, была первой компанией по производству роботов. Первоначально робот рассматривался как диковинка. Также в середине 1950-х годов немецкая фирма Kuka разработала автоматическую сварочную линию для бытовой техники, а также линию многоточечной сварки для Volkswagen. К 1968 году Кавасаки получила лицензию на разработку гидравлического робота Unimation и приступила к его созданию. В 1969, GM выполнила 90% сварных швов кузова, используя Unimates на одном из своих заводов. В 1970 году Стэнфордский университет разработал так называемую стандартную руку, как она известна до сих пор, используемую для сборки мелких деталей и включающую обратную связь по прикосновению и давлению.
В 1969, GM выполнила 90% сварных швов кузова, используя Unimates на одном из своих заводов. В 1970 году Стэнфордский университет разработал так называемую стандартную руку, как она известна до сих пор, используемую для сборки мелких деталей и включающую обратную связь по прикосновению и давлению.
Автоматизированная сварка должна была стать важным применением промышленных роботов, поскольку машины могли производить высококачественные сварные швы в довольно суровых условиях. К 1973 году компания Kuka представила шестиосный рычаг, который стал отраслевым стандартом. Это было примерно в то же время, когда начали появляться полностью электрические роботы. В том же году Cincinnati Milacron представила промышленного робота, управляемого микрокомпьютером, для коммерческого использования. По мере того, как шли семидесятые, десятилетие было ознаменовано многими новшествами: полностью электрический робот с микропроцессорным управлением, высокоточный робот для вставки, более высокая полезная нагрузка, робот для сварки на основе датчиков, робот PUMA для сборки мелких деталей, разработка Selectively Compliant (SCARA) и переход с гидравлического привода на электродвигатель в роботах для точечной сварки.
Когда наступил 1980 год, то же самое произошло и с демонстрацией машинного зрения в Университете Род-Айленда. В следующем году GM запустит трех роботов для сортировки отливок с помощью машинного зрения. Десятилетие украсят другие инновации: разработка языка программирования роботов, робота SCARA с прямым приводом. Скорости и мощности тоже росли.
1990-е годы принесли инновации в области управления и синхронизации роботов, а также первый упаковочный робот, который загружал крендельки. Патент в конце десятилетия добавил лазерное наведение непосредственно на руку робота.
В 2003 году многие были поражены подвигами роботизированных марсоходов NASA Spirit и Opportunity, исследующих поверхность Марса. В 2004 г. были синхронизированы четыре робота, и в общей сложности 38 осей работали вместе. В следующем году беспроводная обучающая подвеска сделала обучение роботов более безопасным. Продолжались успехи в уменьшении веса, грузоподъемности и радиусе действия, скорости и многоосевой синхронизации.
робота начали работать в домах в 2003 году с появлением робота-пылесоса Roomba. К 2009 г.разработка автономных промышленных транспортных средств шла полным ходом, и к началу следующего десятилетия роботизированные руки стали мобильными в промышленном пространстве. В 2013 году были представлены коллаборативные роботы, или КОБОТЫ, предназначенные для работы бок о бок с работниками-людьми. К следующему году AMR, или автономные мобильные роботы, уже активно работали на складах. В 2015 году Omron Electronics купила Adept Technologies, чьи корни восходят к Unimation, первой компании-роботу. Подобные крупные покупки будут иметь место в течение оставшейся части десятилетия.
За последние полвека роботы нашли место и в других сферах, таких как игрушки и развлечения, боевое оружие, помощники в поисково-спасательных работах и многие другие профессии. По сути, по мере совершенствования программирования и технологий роботы находят себе применение во многих профессиях, которые в прошлом были слишком опасными, скучными или невыполнимыми для людей.