Содержание
История робототехники: как выглядели самые первые роботы?
Вот уже несколько сотен лет подряд человечество хочет максимально облегчить себе жизнь, переложив выполнение сложных задач на плечи роботов. И это у нас весьма хорошо получается, потому что уже сегодня любой желающий может купить робота-пылесоса за не такие уж и большие деньги и забыть о мытье полов. В больницах некоторых стран стран частью персонала являются роботы, предназначенные для ухаживания за пациентами. А на заводах производственные механизмы в автоматическом режиме собирают электронику и даже огромные автомобили. Но когда человечество вообще задумалось о разработке роботов и когда изобретателям удалось их создать? Многие скажут, что первого робота в мире создал всем известный Леонардо да Винчи — ведь неспроста среди его документов имелась схема сборки человекоподобного механизма? Но, на самом деле, первые роботы были созданы задолго до рождения итальянского художника и ученого.
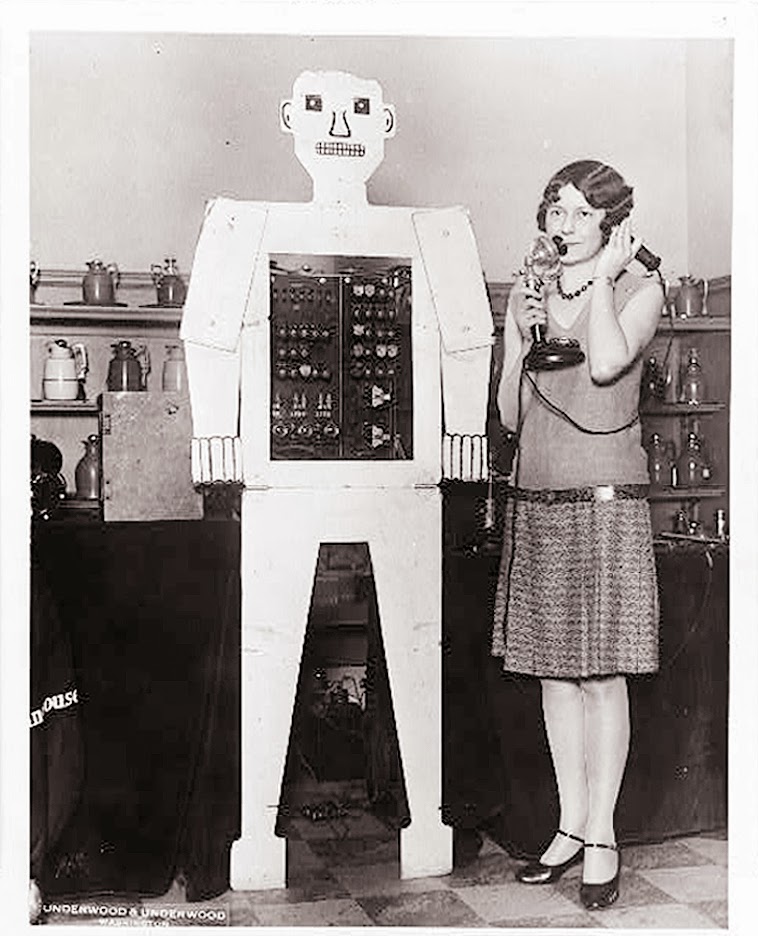
«Мистер Телевокс» — один из первых американских роботов
Содержание
- 1 Какие бывают роботы?
- 2 Первые роботы в истории
- 3 Робот Леонардо да Винчи
- 4 Первый робот-музыкант
- 5 Первый советский робот
- 6 Современные роботы
Какие бывают роботы?
Слово «робот» произошло от слова robota, что можно перевести как «подневольный труд». То есть то, что называется «роботом», вопреки своей воле должно выполнять команды и по своей сути являться рабом. А если быть точнее, термин подразумевает под собой устройство, которое предназначено для выполнения определенного рода действий по заранее заданной инструкции. Обычно роботы получают информацию об окружающей обстановке со встроенных датчиков, которые играют роль органов чувств. А выполнением задач они занимаются либо самостоятельно, следуя заложенной программе, либо повинуясь командам другого человека. Назначение роботов может быть разным, начиная от развлечения людей и заканчивая сборкой сложных устройств.
То есть то, что называется «роботом», вопреки своей воле должно выполнять команды и по своей сути являться рабом. А если быть точнее, термин подразумевает под собой устройство, которое предназначено для выполнения определенного рода действий по заранее заданной инструкции. Обычно роботы получают информацию об окружающей обстановке со встроенных датчиков, которые играют роль органов чувств. А выполнением задач они занимаются либо самостоятельно, следуя заложенной программе, либо повинуясь командам другого человека. Назначение роботов может быть разным, начиная от развлечения людей и заканчивая сборкой сложных устройств.
Роботы бывают разные, но главное, чтобы они не вредили людям
Интересный факт: американский писатель-фантаст Айзек Азимов (Isaac Asimov) является автором трех законов робототехники. Первый — робот не может причинить вред человеку. Второй — робот должен повиноваться всем командам человека кроме тех, которые противоречат первому закону. Третье — робот должен заботиться о себе в ой мере, которая не противоречит первому и второму законам.
Первые роботы в истории
Если верить историческим данным, первые роботы в мире были созданы примерно в 300 году до нашей эры. Тогда, на маяке египетского острова Фарос, были установлены две огромные фигуры в виде женщин. В дневное время они хорошо освещались сами по себе, а ночью загорались искусственным светом. Время от времени они поворачивались и били в колокол, а ночью издавали громкие звуки. И все это делалось для того, чтобы прибывающие корабли вовремя узнавали о приближении к берегу и готовились к остановке. Ведь иногда, при возникновении тумана или кромешной ночи, берег можно было и не заметить. И этих женщин вполне можно назвать роботами, ведь их действия точно соответствуют значению слова «робот».
Маяк на острове Фарос
Робот Леонардо да Винчи
Изобретателем одного из первых роботов считается итальянский ученый Леонардо да Винчи. Судя по документам, обнаруженным в 1950-е годы, художник разработал чертеж человекоподобного робота в 1495 году. В схемах был изображен каркас робота, который был запрограммирован выполнять человеческие движения. Он обладал анатомически правильной моделью челюсти и умел садиться, двигать руками и шеей. Записи гласили, что поверх каркаса должна быть надета рыцарская броня. Скорее всего, идея создать «искусственного человека» пришла в голову художнику в ходе изучения человеческого тела.
В схемах был изображен каркас робота, который был запрограммирован выполнять человеческие движения. Он обладал анатомически правильной моделью челюсти и умел садиться, двигать руками и шеей. Записи гласили, что поверх каркаса должна быть надета рыцарская броня. Скорее всего, идея создать «искусственного человека» пришла в голову художнику в ходе изучения человеческого тела.
Реконструкция робота-рыцаря
К сожалению, ученым не удалось найти подтверждений тому, что робот Леонардо да Винчи действительно был создан. Скорее всего, идея так и осталась на бумаге и так и не была воплощена в реальность. Зато робот был воссоздан в современности, спустя сотни лет после разработки чертежа. Сборкой робота занялся итальянский профессор Марио Таддей, который считается экспертом по изобретениям Леонардо да Винчи. При сборке механизма он строго следовал чертежам художника и в конечном итоге создал то, чего хотел добиться изобретатель. Конечно, широкими возможностями этот робот не блещет, но зато профессор смог написать книгу «Машины Леонардо да Винчи», которая была переведена на 20 языков.
Первый робот-музыкант
Спустя несколько сотен лет после Леонардо да Винчи, попытки создать искусственного человека предпринимал французский механик Жак де Вокансон. Если верить историческим документам, в 1738 году ему удалось создать робота, строение которого полностью копирует анатомию человека. Он не мог ходить, зато отлично играл на флейте. Благодаря конструкции из множества пружин и устройств для вдувания воздуха в различные части механизма, робот-флейтист мог играть на духовом инструменте при помощи своих губ и движущихся пальцев. Демонстрация робота прошла в Париже и была описана в научном труде «Le mécanisme du fluteur automate».
Схема медной утки Жака де Вокансона
Помимо человекоподобного робота, Жак де Вокансон создал роботизированных уток из меди. По своей сути они были механическими игрушками, которые умели двигать крыльями, клевать корм и, как бы странно это не звучало, «испражняться». Сегодня такие технологии выглядели бы крайне странно. К тому же, подобные игрушки уже можно свободно купить в любом детском магазине. Там найдутся как ходячие фигурки, так и сложные роботы с дистанционным управлением. Но сотни лет назад медные утки наверняка казались чем-то волшебным.
К тому же, подобные игрушки уже можно свободно купить в любом детском магазине. Там найдутся как ходячие фигурки, так и сложные роботы с дистанционным управлением. Но сотни лет назад медные утки наверняка казались чем-то волшебным.
Читайте также: Как устроен самый сложный робот на Земле?
Первый советский робот
В XX веке человечество уже осознало перспективы робототехники и всерьез занялось производством роботов. В те времена инженеры хотели создать человекоподобные механизмы, но на настоящих людей они не были похожи. По современным меркам они вовсе были металлическими монстрами, которые практически ничего не умели. Так, в 1928 году, американский инженер Рой Уэнсли показал публике робота «Мистер Телевокс», который умел двигать несколькими конечностями и выполнять простые голосовые команды.
Американский «Мистер Телевокс»
Советский союз тоже не хотел оставаться в стороне. В то время как в других странах разработкой сложных механизмов занимались серьезные дяденьки в толстых очках, в первый советский робот был создан 16-летним школьником. Им оказался Вадим Мацкевич, который в восьмилетнем возрасте создал компактную радиостанцию, а в 12 лет изобрел крошечный броневик, стреляющий ракетами. Он был весьма известным мальчиком и вскоре обзавелся всеми комплектующими, необходимыми для создания полноценного робота.
Им оказался Вадим Мацкевич, который в восьмилетнем возрасте создал компактную радиостанцию, а в 12 лет изобрел крошечный броневик, стреляющий ракетами. Он был весьма известным мальчиком и вскоре обзавелся всеми комплектующими, необходимыми для создания полноценного робота.
Первый советский робот «В2М»
Советский робот «В2М» был представлен в 1936 году в рамках Всемирной выставки в Париже. Его рост составлял 1,2 метра, а для управления использовалась радиосвязь. Человекоподобный робот умел выполнять 8 команд, которые заключались в движении разными частями тела. Из-за слабости моторов, робот не мог полноценно понимать правую руку и этот жест был похож на нацистское приветствие. Из-за этого недоразумения, робот «В2М» принес мальчику множество проблем и от репрессии его спасли только юношеский возраст и поддержка со стороны начальства органа СССР по борьбе с преступностью.
Вырезка из зарубежной газеты о новой версии робота «В2М»
В 1969 году юные последователи Мацкевича создали нового робота, основанного на конструкции «В2М».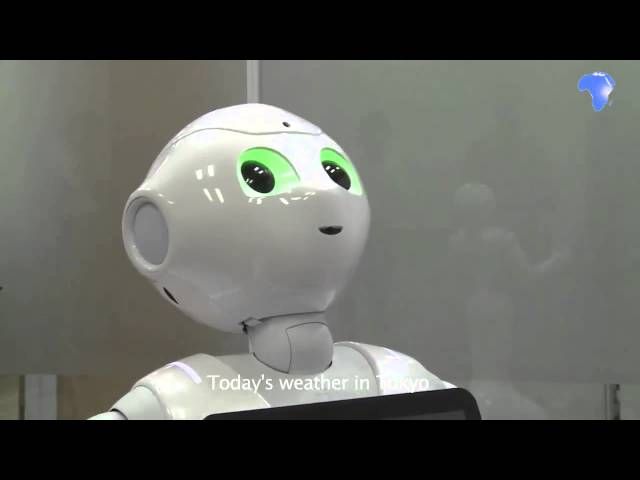 Этот андроид был представлен публике в рамках японской выставки «ЭКСПО-70» и тоже привлек к себе внимание мировой общественности. А сам Вадим Мацкевич все это время занимался созданием «технических» игр для школьников написал две популярные книги: «Занимательная история робототехники» и «Как построить робот». Мацкевич умер в 2013 году и в честь него был снят документальный фильм «Как один лейтенант войну остановил».
Этот андроид был представлен публике в рамках японской выставки «ЭКСПО-70» и тоже привлек к себе внимание мировой общественности. А сам Вадим Мацкевич все это время занимался созданием «технических» игр для школьников написал две популярные книги: «Занимательная история робототехники» и «Как построить робот». Мацкевич умер в 2013 году и в честь него был снят документальный фильм «Как один лейтенант войну остановил».
Современные роботы
Несмотря на все заслуги, титул «отца робототехники» принадлежит не Вадиму Мацкевичу, не Жаку де Вокансону и даже не Леонардо да Винчи. Этот титул был дан американскому инженеру Джозефу Энгельбергеру (Joseph Engelberger), который в 1956 году познакомился с изобретателем Джорджем Деволом (George Devol). Спустя три года со дня знакомства, они представили миру производственного робота Unimate #001. Впоследствии механизм был несколько раз усовершенствован и появился первый робот для сборки автомобилей. Его установили на одном из заводов General Motors для помощи в литье деталей.:quality(80)/images.vogel.de/vogelonline/bdb/732200/732234/original.jpg)
Unimate #001 — первый промышленный робот
На протяжении следующих десятилетий робототехника скакнула далеко вперед. Примерно с 1970 по 2000 годы инженеры придумали множество новых датчиков и контроллеров, которыми можно управлять при помощи разных языков программирования. Роботы в современном обличье появились в 1999 году, когда компания Sony представила робота-собаку по кличке AIBO. Она ведет себя живой организм и умеет выполнять практически все собачьи команды.
История роботов AIBO
Вскоре после этого разработкой роботов занялась компания Boston Dynamics. О ней мы часто рассказываем на нашем сайте, а новости об обновлениях фирменных роботов публикуем в нашем Telegram-канале. Разумеется, до совершенства созданным роботам еще далеко и инженерам предстоит проделать много работы.
Кто изобрел первого в мире робота?
Слово «робот» было популяризовано почти сто лет назад чешским драматургом Карелом Чапеком в одной из популярных пьес 1920-х годов. Происхождение слова робот произошло от старославянского слова работа, которое относилось к принудительному труду или рабству. В спектакле компания Rossum's Universal Robot (R.U.R.) использовала биотехнологии для производства искусственных рабочих, что далековато от сегодняшних механических роботов.
Происхождение слова робот произошло от старославянского слова работа, которое относилось к принудительному труду или рабству. В спектакле компания Rossum's Universal Robot (R.U.R.) использовала биотехнологии для производства искусственных рабочих, что далековато от сегодняшних механических роботов.
Хотя пьеса была популярна, для создания первого настоящего изобретения робота в 1954 году потребовалось более 30 лет. В патентной заявке на программируемый манипулятор робота Джордж Девол описал его как "Программируемый перенос изделия", сославшись на возможность программировать устройство для перемещения предметов.
История роботов могла бы быть совершенно иной, если бы не одна судьбоносная встреча. На коктейльной вечеринке в 1956 году Джордж Девол и Джозеф Энглбергер открыли для себя общий интерес к научной фантастике и предпринимательству. Это привело их к тому, что они стали деловыми партнерами, кардинально изменив будущее робототехники. Сегодня Энгельбергер широко известен как отец робототехники. Он внедрил и популяризовал термин "робот" и способствовал использование роботов на производстве.
Он внедрил и популяризовал термин "робот" и способствовал использование роботов на производстве.
Джозеф Энгельбергер слева, Джордж Девол справа, 1960 год.
Когда и зачем был построен первый робот-манипулятор
Первый роботизированный манипулятор, который Девол и Энглбергер назвали Unimate #001, был изготовлен в 1959 году. В 1961 году Девол получил патент на изобретение робота и вместе с Энгельбергером основал первую в мире роботизированную компанию Unimation — аббревиатуру термина "универсальная автоматизация". Первый робот был установлен на заводе General Motors в Нью-Джерси для помощи машине горячего литья под давлением.
Компания Unimation продолжила разработку роботов для сварки и других областей применения в быстрорастущей автомобильной промышленности. К 1966 году Unimation выдала лицензии Nokia в Финляндии и Kawasaki Heavy Industries в Японии на производство и продажу Unimate, расширив использование программируемых манипуляторов-роботов на мировой рынок.
Энгельбергер и Девол осознали ценность этого устройства для производства. Автомобильная промышленность по-прежнему является крупнейшим рынком для робототехники, однако другие отрасли промышленности, включая сборку электроники, биотехнологии, производство продуктов питания и напитков, а также металлообработка и производство пластмасс, быстро развертывают роботы в рамках мер по их автоматизации. Энгельбергеру также было интересно узнать, как роботы могут быть использованы на благо человечества. Например, он был особенно заинтересован в том, как робототехника может
быть применена в сфере услуг и здравоохранения.
Современные типы роботов
Традиционные роботы широко используются в производственных условиях. Самой быстрорастущей категорией программируемых роботов-манипуляторов сейчас являются коллаборативные роботы (или "коботы"). Эта категория, впервые представленная компанией Universal Robot в 2008 году, навсегда изменила историю роботов. Благодаря инновациям в области автоматизации безопасности роботы больше не требуется устанавливать в изолированных ячейках. Такие роботы могут работать в тесном контакте с людьми.
Благодаря инновациям в области автоматизации безопасности роботы больше не требуется устанавливать в изолированных ячейках. Такие роботы могут работать в тесном контакте с людьми.
С тех пор выпуск коллаборативных роботов освоили многие традиционные производители промышленных роботов, а также стартапы. Тем не менее, растущую на 50-100% в год, Universal Robot и сейчас многие считают лидером рынка коботов.
Модель UR10 в работе
Коллаборативные роботы отличаются от традиционных промышленных роботов несколькими ключевыми характеристиками. Каждый тип роботов имеет свои преимущества и недостатки, в зависимости от их использования. Например, традиционные промышленные роботы, как правило, представляют собой крупное стационарное оборудование, работающее на высоких скоростях с чрезвычайно высокой точностью для автоматизации крупномасштабных, постоянно меняющихся производственных линий.
Эти роботы обычно сложно интегрировать и программировать, но после установки они требуют минимального вмешательства человека.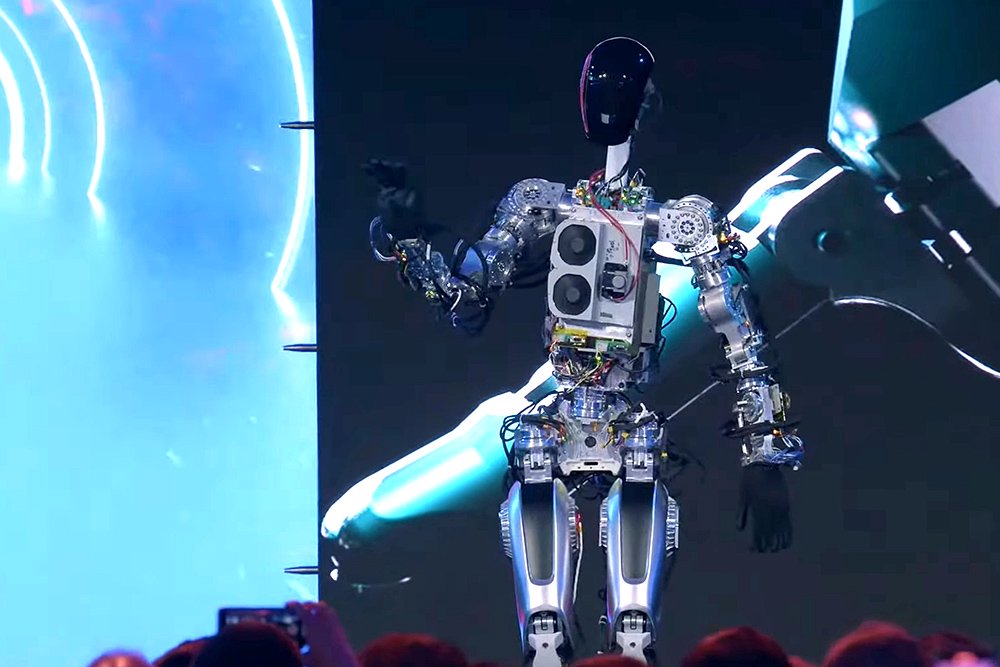 Коллаборативные роботы — это небольшие, легкие и гибкие инструменты автоматизации, которые легко программируются и устанавливаются.
Коллаборативные роботы — это небольшие, легкие и гибкие инструменты автоматизации, которые легко программируются и устанавливаются.
Коллаборативные роботы можно применять для поддержки мелкосерийного смешанного производства в производственном помещении любого размера. Они предназначены для совместной работы с людьми на производственных линиях, и помогают сочетать повторяющиеся задачи, идеально подходящие для автоматизации, с более сложными задачами, требующими человеческой ловкости и/или решения проблем. Коллаборативные роботы являются отличным примером наступившей эры Индустрия 4.0.
Об авторе
Славой Мусилек (Slavoj Musílek), генеральный директор Universal Robots в Центральной и Восточной Европе, России и СНГ
—-
За новостями робототехники и ИИ удобно следить в телеграм-канале prorobots — основные новости; телеграм-трансляции, посвященных робототехнике, еще больше новостей — в телеграм-канале prorobotsRealTime — подпишитесь на него прямо сейчас! Также вы можете подписаться на Facebook страницу prorobots.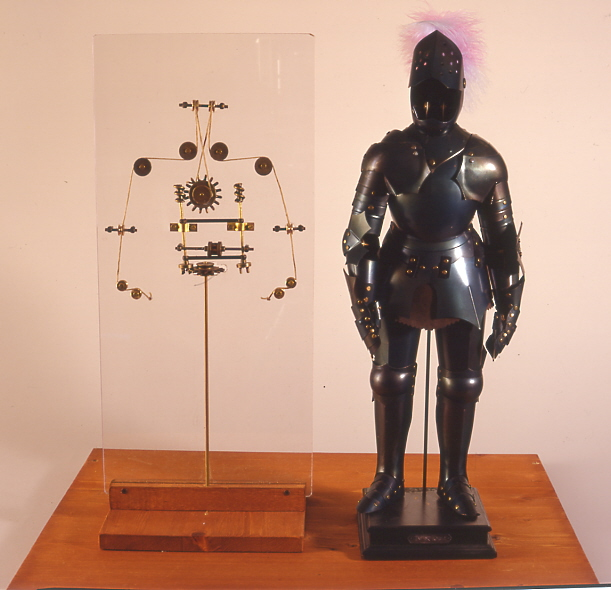
кто изобрел первый экземпляр, история создания
Большинство людей думает, что роботы появились сравнительно недавно. Упоминания о таких устройствах встречаются в романах, написанных в жанре научной фантастики, и в художественных фильмах. При этом далеко не каждому человеку известно, когда конкретно появился первый робот. Появление концепции автоматизированных механизмов уходит своими корнями в далекое прошлое.
Содержание
К истокам робототехники
Если верить историческим источникам, первое роботизированное устройство человек создал еще в 300 году до нашей эры. В тот период на маяке одного из островов в Египте поставили две большие женские фигуры. Днем они были хорошо освещены, а ночью – загоралась искусственная подсветка. Периодически фигуры поворачивались и ударяли в колокол. По ночам они были способны издавать громкие звуки.
Робот Да Винчи
Отвечая на вопрос, кто конкретно изобрел робота, нельзя не упомянуть знаменитого Леонардо да Винчи. Если верить документам, найденным в пятидесятые годы двадцатого века, художнику удалось создать чертеж человекоподобного робота. Это было сделано еще в 1495 году. Схемы включали изображение каркаса устройства, которое могло совершать те же движения, что и человек.
Если верить документам, найденным в пятидесятые годы двадцатого века, художнику удалось создать чертеж человекоподобного робота. Это было сделано еще в 1495 году. Схемы включали изображение каркаса устройства, которое могло совершать те же движения, что и человек.
К тому же сооружение имело анатомически правильную челюсть. Оно могло садиться, двигать шеей и шевелить руками. Согласно записям, сверху каркаса требовалось надеть рыцарскую броню. При этом ученым не удалось получить сведения, что идея Леонардо имела физическое воплощение. Однако его удалось сделать современным ученым.
Сборкой конструкции занимался профессор из Италии Марио Таддей. Он четко придерживался чертежей Леонардо и сумел получить прекрасный результат.
Кто изобрел первого робота
Сложно сказать, кто именно сделал первого робота. Такие попытки совершались еще в Древней Греции. Изобретения тех времен приводились в движение самыми простыми способами – при помощи воды, рычагов, пара. В Китае для этой цели использовали порох и ртуть.
В Китае для этой цели использовали порох и ртуть.
В Средневековье робототехника продолжала свое развитие. Европейские и российские часовщики изготавливали автоматы в форме животных, людей, ангелов. Эти устройства использовались для представлений. В тот же период были созданы и сложные автоматоны. Львы могли рычать, а птицы – петь.
Настоящий прорыв в этом деле совершил Жак де Вокансон. Он создал первый роботизированный механизм с возможностью программирования. Это произошло в восемнадцатом веке.
Как он выглядел
В 1738 году Жак де Вокансон создал первого человекоподобного робота, играющего на флейте. Помимо этого, ему удалось сконструировать механических уток. Они умели разговаривать, испражняться и клевать корм.
Однако настоящим отцом робототехники считается Джозеф Энгельбергер. В 1956 году состоялось его судьбоносное знакомство с изобретателем Джорджем Деволом. Через 3 года они создали производственного робота, который получил название Unimate #001.
В дальнейшем механизм претерпел много изменений. Исследователям даже удалось получить робота, который мог собирать автомобили. Его использовали на заводе General Motors. Устройство помогало отливать детали машин.
При этом компания Unimation продолжила разрабатывать конструкции для сварки и других областей автомобильной промышленности. В 1966 году бренд предоставил лицензии Nokia и Kawasaki Heavy Industries на изготовление и реализацию Unimate на мировом рынке.
В течение следующих десятилетий в сфере робототехники произошло много изменений. В период с 1970 по 2000 год инженерам удалось придумать много новых датчиков и контроллеров, управление которыми осуществлялось посредством различных языков программирования. Роботы, похожие на современные, были созданы в 1999 году. Именно тогда компания Sony изготовила собаку по кличке AIBO. Ее поведение напоминало живой организм. К тому же собачка могла выполнять любые команды.
Первый робот в СССР
В двадцатом веке робототехника получила широкое распространение в разных странах мира. В тот период инженеры стремились создавать человекоподобные конструкции, однако они не слишком напоминали настоящих людей. По сегодняшним меркам устройства представляли собой металлических чудовищ, которые почти ничего не могли. К примеру, в 1928 году инженер из США Рой Уэнсли представил робота «Мистер Телевокс». Он мог совершать движения конечностями и реализовывал несложные команды.
В тот период инженеры стремились создавать человекоподобные конструкции, однако они не слишком напоминали настоящих людей. По сегодняшним меркам устройства представляли собой металлических чудовищ, которые почти ничего не могли. К примеру, в 1928 году инженер из США Рой Уэнсли представил робота «Мистер Телевокс». Он мог совершать движения конечностями и реализовывал несложные команды.
СССР тоже не желал оставаться в стороне. При этом первого советского робота сделал шестнадцатилетний юноша Вадим Мацкевич. В 8 лет мальчик сконструировал небольшую радиостанцию, а в 12 – компактный броневик, который мог стрелять ракетами.
Мальчик был весьма известен. Потому ему удалось получить все детали, которые требовались для создания настоящего робота. В 1936 году советский робот был представлен на Всемирной выставке, которая проходила в Париже. Он получил название «В2М». Высота конструкции составляла 1,2 метра, а для управления – применялась радиосвязь. Человекоподобный робот мог выполнять 8 команд и двигать различными частями тела.
Однако для создания конструкции применялись слабые моторы, потому робот не имел возможности нормально поднимать правую руку. Как следствие, жест напоминал приветствие нацистов. Это недоразумение принесло создателю механизма большое количество проблем. От преследований его спасли только юный возраст и поддержка советского органа, который занимался борьбой с преступностью.
В 1969 году последователям Мацкевича удалось создать другого робота. В основу изобретения легло устройство «В2М». Публика увидела андроида в рамках японской выставки «ЭКСПО-70». Новая конструкция тоже привлекла внимание широкой общественности. При этом сам Вадим Мацкевич в это время занимался разработкой технических игр для детей и выпустил несколько книг по робототехнике, которые получили широкую популярность.
Создание роботов имеет весьма интересную историю. Далеко не каждому известно, что первые подобные сооружения появились еще в античные времена. После конструкции претерпели много изменений. Они постоянно совершенствовались и улучшались, что помогло внести значительный вклад в развитие научно-технического прогресса.
Они постоянно совершенствовались и улучшались, что помогло внести значительный вклад в развитие научно-технического прогресса.
История роботов
Роботы в нашем сознании прочно ассоциируются с технологиями будущего. Но истоки возникновения этих проявлений будущего можно обнаружить в конце 2 тысячелетия до н. э., ведь именно тогда появились первые автоматизированные устройства. Погодите, объясним. История роботов началась задолго до появления жанра фантастики и выхода на экраны фильмов на эту тему и тесно переплетается с развитием механики.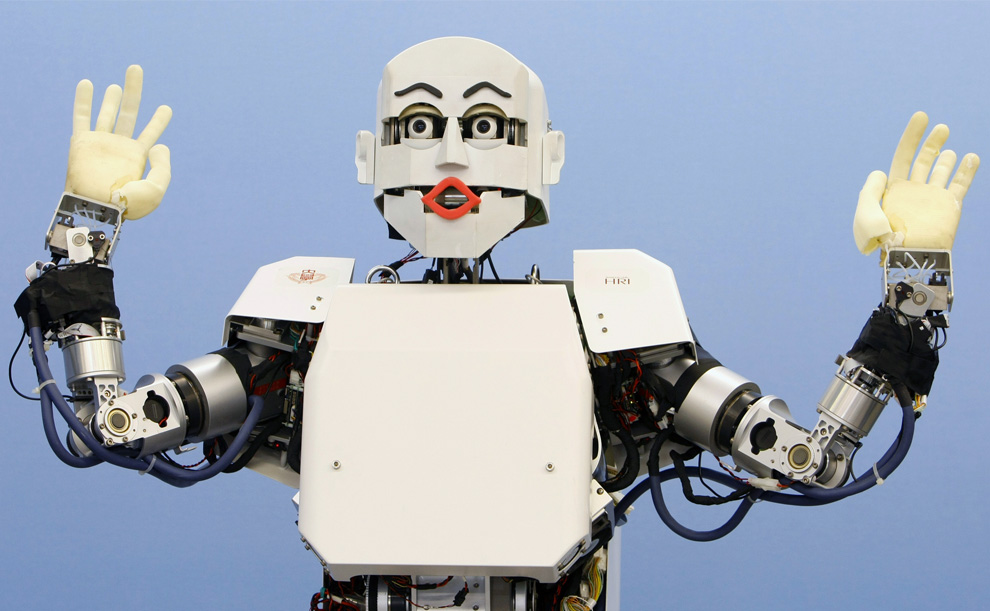
Первые шаги
Многие историки считают, что первый в мире робот был создан в колыбели наук – Древней Греции. Изобретатель Архит Тарентский в V веке до н.э. создал деревянного голубя, которого отправляла в небо паровая катапульта. Инженер Филон Византийский также описывал в своих трудах механическую прислугу, которая наливала из кувшина вино. Баловался созданием механизмов и великий Архимед – его «коготь» уничтожил немало вражеского флота. Изобретение представляло собой укреплённую на стене балку, которая цепляла крюком корабли и поднимала их в воздух, стряхивая за борт экипаж. Но задолго до древнегреческих творений египетские жрецы создали статую, которая указывала перстом на наследника фараона во время церемоний.
Человекоподобные роботы
Человек издавна хотел найти помощника, похожего на него самого. Созданный троллем глиняный гигант Мёккуркальви из скандинавской мифологии, Голем из еврейской легенды, Галатея из мифа о Пигмалионе – их объединяет идея искусственных созданий.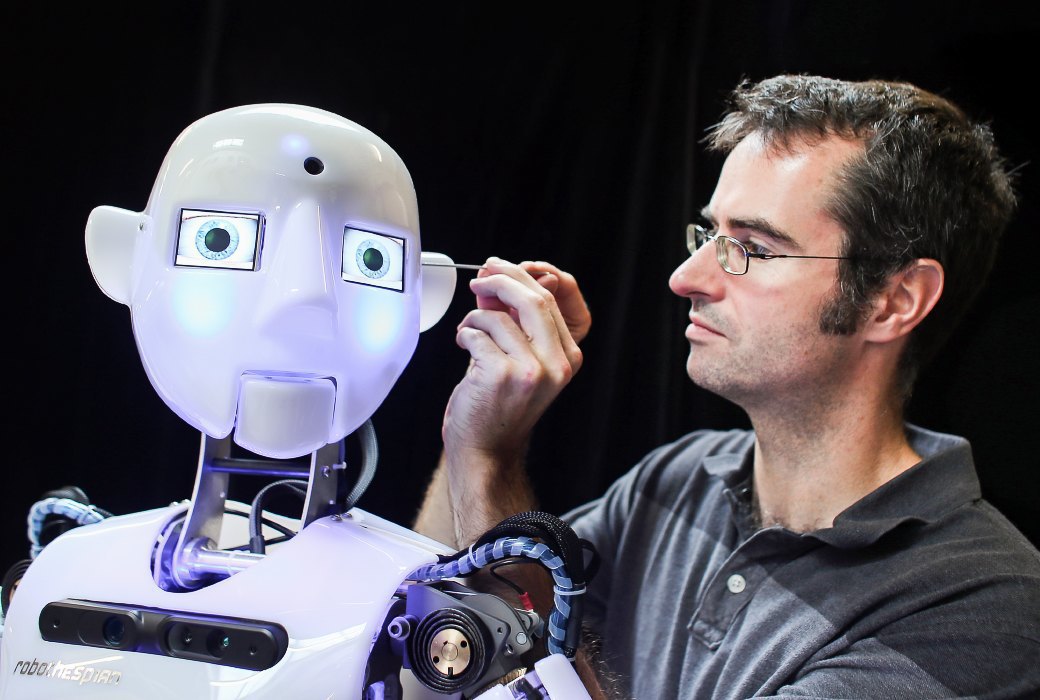 Мудрец Лао Цзы упоминал в своих сочинениях механического человека, разработанного специально для потехи императора. В Средние века центром научной мысли стали монастыри – теолог Альберт Великий, по легенде, создал автоматическую служанку, которая могла самостоятельно передвигаться и даже повторять отдельные слова. На Руси была своя подобная история – о «железном мужике» Ивана Грозного, причём упоминание о нём было в письмах голландского купца. Но всё это легко обозвать домыслами. Подтверждённый факт – схемы и чертежи Леонардо да Винчи. По его работам в XX веке была создана точная функционирующая копия рыцаря, который мог двигать руками и ногами и открывать рот.
Мудрец Лао Цзы упоминал в своих сочинениях механического человека, разработанного специально для потехи императора. В Средние века центром научной мысли стали монастыри – теолог Альберт Великий, по легенде, создал автоматическую служанку, которая могла самостоятельно передвигаться и даже повторять отдельные слова. На Руси была своя подобная история – о «железном мужике» Ивана Грозного, причём упоминание о нём было в письмах голландского купца. Но всё это легко обозвать домыслами. Подтверждённый факт – схемы и чертежи Леонардо да Винчи. По его работам в XX веке была создана точная функционирующая копия рыцаря, который мог двигать руками и ногами и открывать рот.
Новые механизмы
Появление пружины и маятника предоставило возможности для мощнейшего прорыва в механике. Крякающие «утки», автоматический «музыкант», «художники» и «писари» уже отличались от примитивных механизмов тем, что их можно было закодировать, то есть внести определённую последовательность действий. Яркий пример, доставшийся нам в наследие из того времени, – хранящиеся в Эрмитаже золотые часы с павлином, вывезенные Екатериной Великой из Британии.
Пружинный заводной механизм имел много недостатков, поэтому первые попытки заставить автоматизированные системы работать на благо человечества пришлись на век электричества. Никола Тесла изобрёл самоходную лодку, которая управлялась с помощью радио. Француз Жозеф Мари Жаккар создал работавший от перфокарт станок. Всё было готово для создания первого в мире действующего робота…
Роботы на каторге
Так, современным «папой» робота принято считать американского инженера Роя Уэнсли из корпорации Westinghouse Electric Company. «Герберт Телевокс» появился на свет в 1928 году и представлял собой человекоподобную машину. Он мог открывать двери и окна, реагировал на команды. Первенство оспаривают японцы – создание биолога Макото Нисимуры умело ещё и писать иероглифы.
Интересно, что само слово «робот» стало употребляться только в 1920 году. Чешский писатель Карел Чапек выпустил пьесу под названием Rossumovi univerzální roboti, в которой описывается искусственно созданный человек, занимающийся каторжным трудом («робот» – по сути, тот, кто выполняет тяжёлую работу).
История роботов получила своё развитие после окончания Второй мировой войны. Огромные мощности были пущены на разработку роботов в Америке, а лидером в их производстве стала Япония.
Сегодня робототехника – один из предметов изучения уже в начальной школе. И популярность этой темы только возрастает с каждым очередным этапом развития. Роботы-собаки, роботы-обнимашки, роботы-собеседники и роботы-младенцы, роботы со знанием основ медицинской помощи… Они рисуют, работают на Марсе, танцуют, убирают в доме и воссоздают весь спектр человеческих эмоций. Механизмы становятся всё совершеннее – главное, чтобы в один далеко не прекрасный день они не решили сместить с пьедестала человечество. На этот счёт создано немало интересных мультфильмов и кинолент.
Калужская область, Боровский район, деревня Петрово
23-24 февраля 2019 года в ЭТНОМИРе состоится фестиваль науки и технического творчества!
На «Технофесте» вас ждут выставки технологических устройств и изобретений, демонстрация роботов, встречи с учёными-изобретателями, яркие и познавательные научные шоу. Будут открыты мастерские, физические и химические лаборатории, которые заинтересуют как начинающих любителей науки, так и продвинутых техногиков. Возраст участников ограничен только рамками их заинтересованности. На «Технофесте» будет идти речь о самом сложном, но при этом самым простым и доступным языком!
Будут открыты мастерские, физические и химические лаборатории, которые заинтересуют как начинающих любителей науки, так и продвинутых техногиков. Возраст участников ограничен только рамками их заинтересованности. На «Технофесте» будет идти речь о самом сложном, но при этом самым простым и доступным языком!
Понравилась статья — поделись с друзьями!
от чертежа Да Винчи до Aiko Chihira
Человечество всегда максимально старалось облегчить повседневную жизнедеятельность и работу. И в ходе этой эволюции возник класс машин – роботов, а вместе с ним и целое направление – робототехника. Одной из стран, в которой эта дисциплина развита наиболее активно, является Япония. Разработчики планируют применять роботов не только в промышленных целях, но и в бытовых условиях. Ученые надеются, что домашние роботы уже в ближайшие десятилетия станут таким же привычным явлением, как использование смартфонов.
Однако с чего начинались робкие шаги истории робототехники?
I–III вв. н.э.
н.э.
Здесь берет начало история роботов. Первые статуи богов с движущимися конечностям и головой в Древнем Египте, Вавилоне, Китае. Автоматический шар, созданный Архимедом, с отражением небесных светил. Автоматические системы Герона Александрийского для продажи святой воды.
Средние века
Наиболее популярными тогда были автоматические часовые механизмы и человеческие фигуры, которые двигались.
В 1495 году – проект Леонардо да Винчи – механический человек.
В середине 1700-го часовщики Пьер-Жаке Дро и его сын Анри-Луи Дро развивали автоматические системы. От имени последнего и произошло слово «андроид».
К 1805 году возникают механизмы, дающие начало созданию автоматических станков.
Конец XIX – начало XX вв.
Увидела свет пьеса Rossumovi univerzální roboti («Россумские универсальные роботы») чешского автора Карла Чапека, которая дала миру слово «роботы» – создания, механически и интеллектуально совершеннее человека.
Наиболее широко и значимо в литературе тема робототехники раскрылась в работах Айзека Азимова, в цикле рассказов «Я, робот». Сейчас, кажется, о трех законах робототехники знает даже далекий от этой сферы человек.
В начале XX века были известны такие роботы:
1928 г. – «Мистер Телевокс» (автор – инженер Дж. Уэнсли, США) – робот-гуманоид, выполняющий движения по команде. Еще один робот – «Естествоиспытатель» (доктор Нисимура Макота) – андроид, положивший начало японской истории роботостроения. Умел двигать конечностями и головой:
1931 г. – робот-сценарист (сценарист из Лос-Анджелеса Уиклиф Хилл) – разработка функционировала по заранее заложенной программе и могла создавать миллионы сюжетов для журналов и кино:
1933 г. – «Сабор» (изобретатель Август Губер) – роботы-автоматы, которые говорили и передвигались, выполняли различные манипуляции.
1936 г. – первый российский андроид В2М (школьник Вадим Мацкевич) – разработка размером в 1,2 метра регулировалась по радиосвязи и выполняла 8 команд.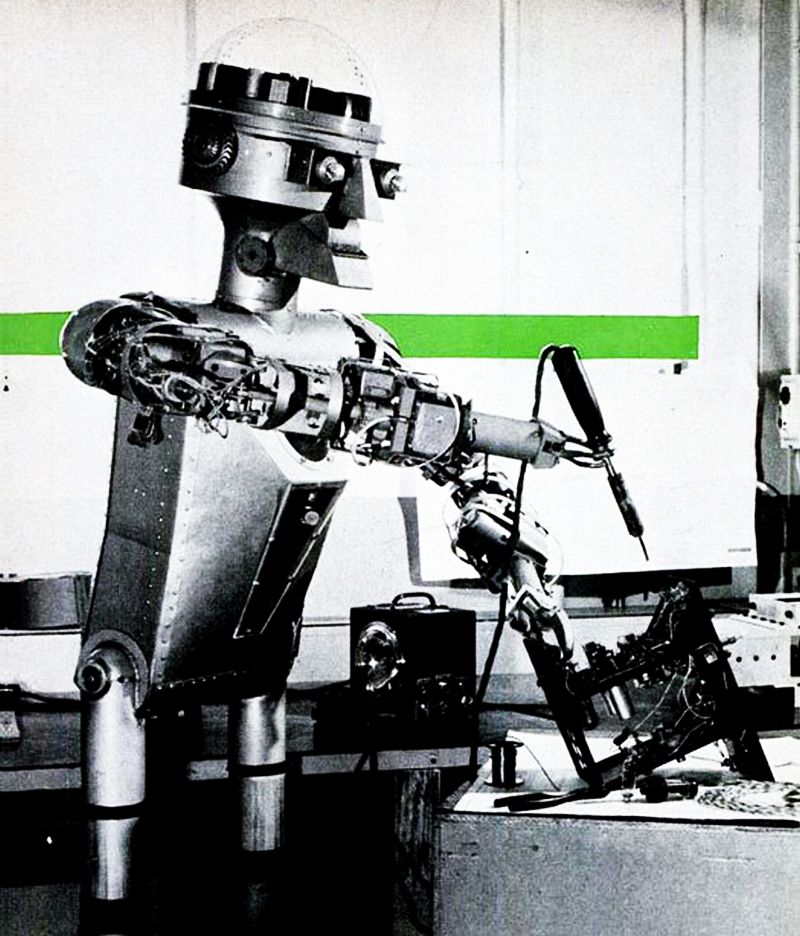
1937 г. – Elektro, ставший знаменитым в свое время (компания Westinghouse), – имел рост 2,5 метра и продвинутую электрическую систему управления, выполнял 26 предопределенных команд и мог составить компанию курильщику, если ему предложат сигарету. У Elektro был друг – робот-собака Sparko:
1950–2000 годы
Период, отличающийся первыми коммерческими успехами промышленных роботов и их последующим совершенствованием.
1947 г. – начало разработки промышленных роботов, когда в Америке был внедрен первый автоматический электромеханический манипулятор, названный промышленным роботом.
В начале 1960-го набирает популярность роботизированное производство и использование первых «умных машин».
1961 г. – компания Unimation внедряет роботов на производственные линии заводов General Motors в Нью-Джерси. В 1965 году Ральфом Мошером, инженером компании General Electric был разработан робот Walking Truck для переноски грузов и ряда схожих функций.
В 1967–1969 годах происходит развитие и использование роботов на предприятиях Европы, а также активная стадия роботизации в Японии (робот Unimate Kawasaki 2000).
Технический прогресс в робототехнике двигался в направлении систем совершенствования управления. Развитая система сенсоров характерна для таких робототехнических систем: Unimate, KUKA, FANUC, Hitachi, Westinghouse.
Период с 1970-го по 2000-й характеризуется активным ростом и развитием отрасли: использованием новых контроллеров, развитием языков программирования, запуском первых роботов в космос и возникновением машин, создающих роботов.
Двухтысячные годы ознаменовались выпуском андроидов и гуманоидов.
1999 г. – робот-собака AIBO, созданная компанией Sony. Наиболее продвинутая разработка на данный момент. Ведет себя как полностью живой организм, выполняя основные для собаки команды. Он может сам развиваться, взаимодействуя с хозяином и обстановкой. Любопытный факт: владельцы отмечают, что AIBO любит «смотреть» телевизор. В 2006 г. корейская фирма Dasarobot выпустила аналог робота-собаки Genibo.
Ведет себя как полностью живой организм, выполняя основные для собаки команды. Он может сам развиваться, взаимодействуя с хозяином и обстановкой. Любопытный факт: владельцы отмечают, что AIBO любит «смотреть» телевизор. В 2006 г. корейская фирма Dasarobot выпустила аналог робота-собаки Genibo.
В 2000 году впервые появился ASIMO первый в линейке шагающих роботов. Разработчик – компания Honda. ASIMO умеет передвигаться, вступать во взаимодействие с людьми и выполнять бытовые задачи.
2005 г. – робот-гуманоид RoboThespian британской компании Engineered Arts. Пройдя несколько модификаций, он стал наилучшей системой для общения и развлечений.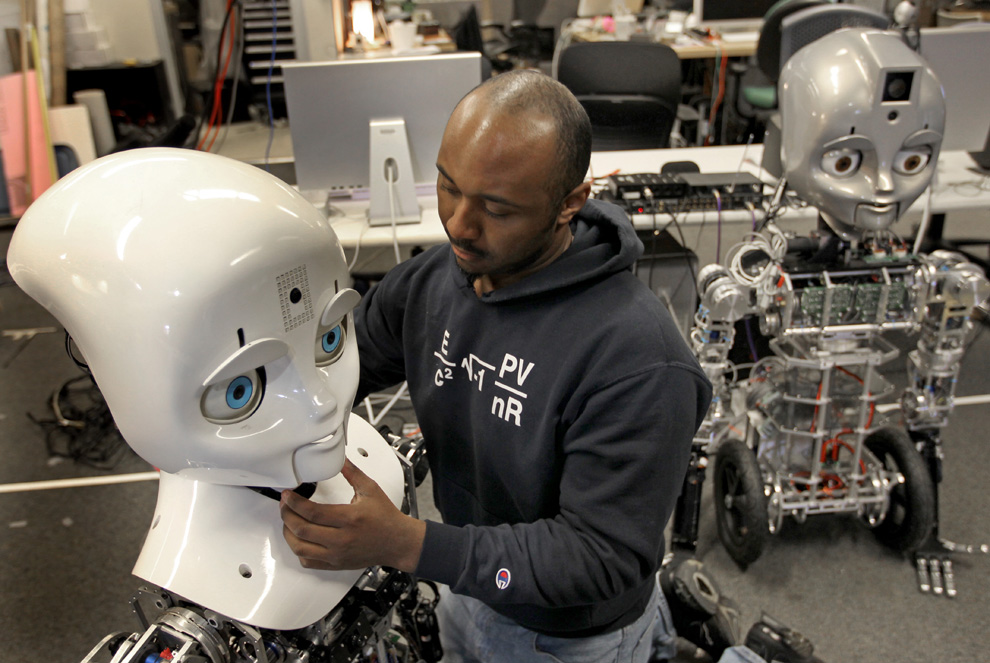
BigDog – боевой четырёхногий робот, созданный в 2005 году Boston Dynamics совместно с Foster-Miller и NASA.
В 2013-м Boston Dynamics показала миру другой проект: робот Atlas. Разработка предназначена для перемещения по неровной местности на двух ногах. К настоящему моменту проект совершенствуется и проходит ряд испытаний.
iCub – этот робот-ребенок появился в 2004 году благодаря проекту RobotCub Consortium с целью проверки теории о когнитивном познании.
NAO – разработка, созданная в 2008 году и достигшая численности свыше 5000 роботов к настоящему моменту. Человекоподобный и дружелюбный робот для дома, университетов и лабораторий, созданный для помощи в научных исследованиях и образовании.
Человекоподобный и дружелюбный робот для дома, университетов и лабораторий, созданный для помощи в научных исследованиях и образовании.
2014 г. – Aiko Chihira (Айко Чихира) – робот-гуманоид от Toshiba начал работать в торговом центре Мицукоси в Нихонбаси, Токио. Он говорит на японском (хотя в презентации на CES 2015 неплохо справлялся с английским) и владеет языком жестов. Айко помогает ориентироваться в торговом центре.
Первые роботы и история развития робототехники
В массовом сознании слово «робот» ассоциируется в основном с научными достижениями и идеями 20-21 веков. Особенно часто этот термин мало разбирающийся в технических областях человек встречает в произведениях научной фантастики – романах Айзека Азимова, сериях фильмов «Терминатор», «Трансформеры» и т.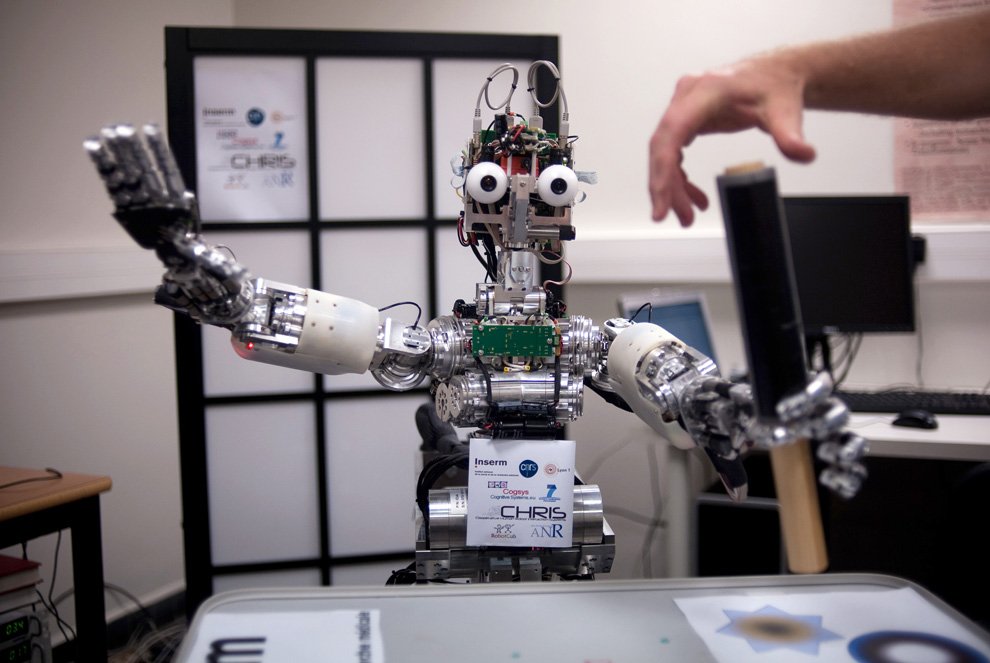 д. Более продвинутые из них еще могут припомнить советские «Луноходы», промышленные или медицинские аппараты, зверо- или человекоподобных роботов из рекламных роликов компании Boston Dynamics. Однако, как и многие другие великие идеи человечества, концепция автоматизированных механизмов, способных самостоятельно выполнять различные операции, появилась гораздо раньше и прошла длительный путь своего развития.
д. Более продвинутые из них еще могут припомнить советские «Луноходы», промышленные или медицинские аппараты, зверо- или человекоподобных роботов из рекламных роликов компании Boston Dynamics. Однако, как и многие другие великие идеи человечества, концепция автоматизированных механизмов, способных самостоятельно выполнять различные операции, появилась гораздо раньше и прошла длительный путь своего развития.
Определение понятия
Прежде, чем говорить о том, какими были самые первые роботы, следует определить, что именно подразумевается под данным понятием. Это имеет важное значение для понимания развития данной технологии и ее уникальности.
Первое появление слова «робот» относится к 1920 году, когда чешский писатель Карел Чапек употребил его в фантастической пьесе «Rossumovi univerzální roboti (R.U.R)»
. Там оно обозначало искусственно созданного человека, чей труд использовался на тяжелых и опасных производствах взамен человеческого (robota в переводе с чешского – каторга). И хотя в этом произведении роботы изготавливались на фабриках из выращенных органических тканей, само понятие впоследствии было популяризировано именно в отношении механических устройств.
И хотя в этом произведении роботы изготавливались на фабриках из выращенных органических тканей, само понятие впоследствии было популяризировано именно в отношении механических устройств.
Робота следует отличать от простых механизмов и автоматов.
Это устройство обладает способностью к более тесному и комплексному взаимодействию с оператором и внешней средой. Если простой автоматический механизм при выполнении определенного действия слепо следует заранее заложенному в нем алгоритму, то робот способен воспринимать внешние сигналы и в соответствии с ними адаптировать свои действия. Таким образом его взаимодействие с внешней средой становится более гибким, точным и универсальным. Даже самые первые в мире роботы, о которых будет сказано далее, имели примитивные аналоги органов чувств, без которых это принципиальное отличие было бы невозможным.
У истоков: первые прообразы роботов
Однако история создания роботов тесно переплетается с развитием механики и логически из нее проистекает.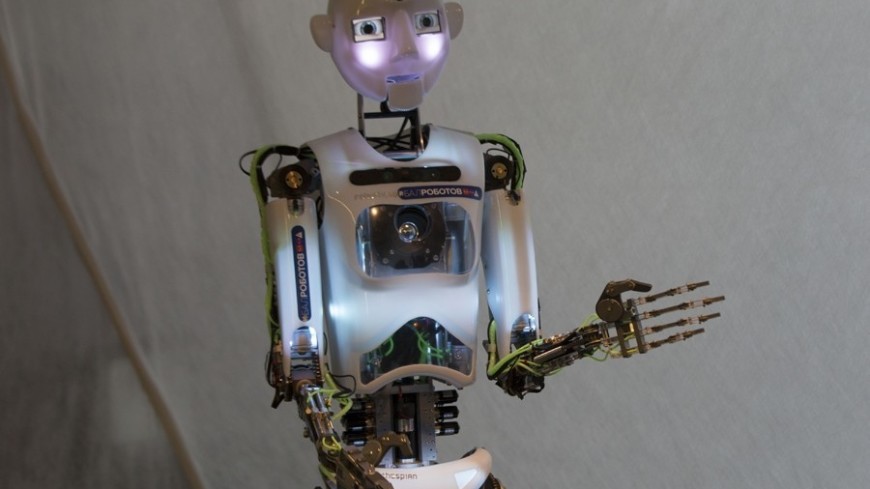 Поэтому для ее понимания необходимо углубиться на несколько веков назад, а именно в эпоху античности, когда процветала колыбель наук – Древняя Греция. В этой стране появились автоматические устройства, созданные для выполнения практических задач и развлечения. В качестве примера можно привести описанную Филоном Византийским механическую женщину-слугу, которая наливала из кувшина вино во вставленный в ее руку стакан.
Поэтому для ее понимания необходимо углубиться на несколько веков назад, а именно в эпоху античности, когда процветала колыбель наук – Древняя Греция. В этой стране появились автоматические устройства, созданные для выполнения практических задач и развлечения. В качестве примера можно привести описанную Филоном Византийским механическую женщину-слугу, которая наливала из кувшина вино во вставленный в ее руку стакан.
Древнегреческий математик и изобретатель Архит Тарентский еще в 5 веке до н. э. изобрел деревянного голубя
, который запускался в небо с помощью паровой катапульты. Многие историки технологий считают, что первый робот в истории был создан именно в этот момент, хотя корректнее считать его прототипом крылатой ракеты или реактивного снаряда.
Еще более сложное и грандиозное автоматическое устройство существовало в научной столице античного мира – великом городе Александрия.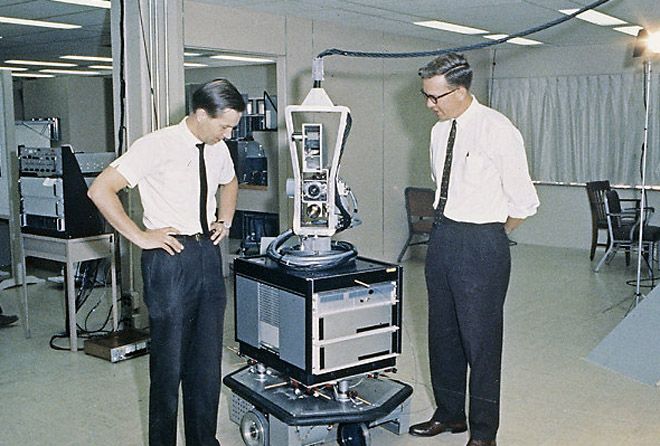 На расположенном здесь в начале нашей эры знаменитом Фаросском маяке были размещены величественные женские фигуры. Они могли указывать направление ветра и движение небесных светил (Солнца и Луны), отсчитывать время и даже сигнализировать морякам об опасности во время шторма или тумана с помощью громкого трубного звука. В древнегреческом городе Сиракузы на острове Сицилия жил
На расположенном здесь в начале нашей эры знаменитом Фаросском маяке были размещены величественные женские фигуры. Они могли указывать направление ветра и движение небесных светил (Солнца и Луны), отсчитывать время и даже сигнализировать морякам об опасности во время шторма или тумана с помощью громкого трубного звука. В древнегреческом городе Сиракузы на острове Сицилия жил
великий греческий изобретатель и ученый Архимед, также прославившийся созданием автоматических механизмов
. В частности, ему приписывается создание первого прообраза настоящего боевого робота. Устройство под названием «коготь», устанавливаемое на крепостной стене, захватывало длинным крюком осаждавшие город римские корабли, поднимало их в воздух и переворачивало, стряхивая экипаж за борт.
Другой гениальный грек, Герон Александрийский, изобрел первый в истории программируемый автомат.
Тележка, вывозившая на сцену механизированные марионетки, управлялась с помощью веревки и колышков. Изменяя положение последних, Герон регулировал наматывание тросиков на независимые оси повозки, тем самым задавая ей траекторию движения. Этот принцип в чем-то похож на перфорированные ленты и карты – средства записи и хранения информации, используемые в автоматических станках и ЭВМ вплоть до 80-х годов ХХ века.
История робототехники была бы неполной без достижений других государств того времени.
Так, еще в конце 2 тысячелетия до н. э., задолго до древнегреческих механизмов, в Древнем Египте жрецы изготовили статую, которая поднятием руки указывала на наследника фараона во время религиозных церемоний. А в Китае примерно в это же время местные мастера создавали первые прототипы роботов, приводимые в действие силой пороховых взрывов. Великий мудрец Лао-Цзы упоминал о механическом человеке, разработанном для императора на рубеже 1 и 2 тысячелетия до н. э.
Великий мудрец Лао-Цзы упоминал о механическом человеке, разработанном для императора на рубеже 1 и 2 тысячелетия до н. э.
И все же именно Древнюю Грецию можно считать родиной робототехники, потому как здесь были не просто построены многие автоматические устройства, но теоретизированы принципы их создания и функционирования.
Античные изобретатели и ученые разработали многие виды передач и двигателей (в том числе паровой, гидравлический и пневматический), сформулировали основные законы классической механики, благодаря чему последующие поколения смогли воспроизвести и развить их опыт.
«Роботы» Средневековья
Вопреки распространенному мнению, Средние века не были эпохой всеобщего упадка и технологического регресса. Наука, в том числе механика, хотя и с некоторой задержкой в первые века после падения античных держав, продолжала свое развитие. Удивительно, но многие сложные устройства появились на свет благодаря силе, которая в массовом сознании ассоциируется только с мракобесием – а именно Церкви.
Удивительно, но многие сложные устройства появились на свет благодаря силе, которая в массовом сознании ассоциируется только с мракобесием – а именно Церкви.
В те времена католические монастыри были одним из центров научной и инженерной мысли.
В частности, легенды приписывают виднейшему ученому и теологу Альберту Великому создание «механической служанки», которая умела самостоятельно передвигаться и даже воспроизводить речь. Задокументированным, и, следовательно, более достоверным, выглядит свидетельство средневекового архитектора Виллара де Онекура (13 век н. э.), который в своем труде описал зооморфные механизмы, а также фигуру ангела, поворачивающуюся вслед за движением солнца. К тому же 13 веку относится увеселительный сад в поместье графа Роберта II д’Артуа, заполненный автоматическими обезьянами, птицами и механизированными фонтанами.
Большое развитие механика получила в это время и на Востоке.
Византия, практически не затронутая потрясениями Раннего Средневековья, славилась автоматонами, встречавшими иностранных гостей в императорском дворце. Согласно свидетельствам, около царского трона были расположены два металлических льва, которые умели реветь и бить хвостами, а в кронах деревьев находились механизированные птицы, певшие и щебетавшие на разные голоса. В мусульманских странах того времени механика и математика вышли на качественно новый уровень, благодаря чему их мастера создавали удивительные устройства. Так, братья Бану Муса в 9 веке н. э. изобрели искусственного флейтиста, а видный ученый того времени Али ибн Халаф аль-Маради, живший в 11 веке, в своей «Книге тайн» описал около 30 сложных автоматонов.
Здесь же следует упомянуть и легенду о «железном мужике», созданном придворными мастерами Ивана Грозного.
Согласно ей, человекоподобный механический слуга при дворе русского царя подавал ему чашу с вином и кафтан, подметал пол, кланялся гостям и даже «побивал медведя». Звучит фантастично, но следует учитывать, что эта легенда основана на письмах голландского купца Йохана Вема – человека крайне прагматичного и не склонного к фантазиям.
Звучит фантастично, но следует учитывать, что эта легенда основана на письмах голландского купца Йохана Вема – человека крайне прагматичного и не склонного к фантазиям.
На закате эпохи Средневековья автоматические устройства, воспроизводящие достаточно сложные действия, популяризировались и легендарным Леонардо да Винчи.
Леонардо да Винчи, будучи гением инженерной мысли, в своих зарисовках предложил схемы самых разных механизмов, одним из которых является фигура закованного в латы рыцаря, которая могла двигать руками и шеей, садиться и даже открывать рот. Собранный образец демонстрировался изобретателем при дворе Людовика Сфорца, герцога Миланского, в 1495 году. В 20 веке по сохранившимся чертежам была воспроизведена точная и функциональная копия этого устройства, сегодня хранящаяся в Миланском музее.
Новое время: золотой век автоматонов
Однако настоящую популярность и бурное развитие автоматические механизмы получили с началом эпохи Возрождения. Наука, вырвавшись из монополии Церкви, получила дополнительный импульс к развитию, в том числе за счет переосмысления достижения античных ученых. И на первую роль в новой волне старинной робототехники вышли часовщики. Здесь стоит упомянуть о двух важных изобретениях, которые способствовали развитию технологии автоматонов – пружинному и маятниковому заводным механизмам. До этого подобные устройства приводились в движение гирями, что позволяло создавать только крупные и относительно несложные изделия.
Наука, вырвавшись из монополии Церкви, получила дополнительный импульс к развитию, в том числе за счет переосмысления достижения античных ученых. И на первую роль в новой волне старинной робототехники вышли часовщики. Здесь стоит упомянуть о двух важных изобретениях, которые способствовали развитию технологии автоматонов – пружинному и маятниковому заводным механизмам. До этого подобные устройства приводились в движение гирями, что позволяло создавать только крупные и относительно несложные изделия.
Новые накопители энергии (пружина и маятник) стали настоящим прорывом в миниатюризации автоматических механизмов.
Особенно прославился на этом поприще мастер Жак де Вокансон, который жил в 18 веке – к слову, в детстве обучавшийся в иезуитской школе. Особенную популярность получили два его изобретения:
-
механическая утка
, способная взмахивать крыльями, клевать зерно с руки и даже испражняться; -
автоматический музыкант
, умеющий наигрывать различные мелодии на флейте и свирели.

Другим известным мастером был швейцарец Пьер Жаке Дро, живший в том же 18 веке и основавший знаменитую часовую компанию Jaquet Droz. В то время он прославился не только своими хронометрами, но и множеством сложнейших устройств, среди которых особенно известно три его творения:
-
«Писарь»
– автоматическая фигура мальчика, содержащая около 4 000 деталей, была способна написать любой текст из 40 знаков, самостоятельно макая перо в чернильницу; -
«Художник»
– похожий автомат, только вместо текста наносивший на бумагу различные рисунки, например портреты людей, изображения животных и т. д.; -
«Девушка-музыкант»
– автомат в виде органистки, который умел наигрывать на небольшом органе 5 различных мелодий, при этом двигая головой и телом, а в конце выступления изящно кланяясь.
Отличительной чертой этих автоматонов была возможность их программировать, для чего использовались барабаны или диски с насечками, в которых была закодирована последовательность действий. Поменяв их расположение, мастер мог заставить свои устройства написать различные тексты, сыграть другую мелодию и т. д. И все же утверждать, что именно он создал первого робота, нельзя – его механизмы еще слишком мало взаимодействовали с внешней средой, а их функции были сугубо развлекательными.
Технология создания подобных устройств получила широкое распространение не только в Европе, но и мире.
В конце 18 века в Японии была создана автоматическая девушка, способная стрелять из лука. В Эрмитаже выставлены знаменитые часы с павлином, купленные Екатериной Великой в Британии. Вклад российских мастеров здесь тоже есть – при перевозке в Россию механизм сильно повредился, но знаменитый изобретатель Кулибин смог полностью восстановить его.
Изготовление автоматонов развивалось по пути не только усложнения, но и миниатюризации устройств. Если первые образцы таких механизмов занимали достаточно много места, то к 19 веку их часто умещали в карманные часы. В основном это были сугубо развлекательные устройства, изготавливаемые для аристократов, передвижных цирков, выставок и т. д. Однако пройдет совсем немного времени, и автоматы начнут помогать людям.
Современный этап развития робототехники
Механические игрушки-автоматоны изготавливались часовщиками вплоть до начала 20 столетия. Их главным недостатком был сильно ограниченное время действия и слабость из-за особенностей пружинного заводного механизма. Однако развитие технологии электричества дало человечеству новый источник энергии, которым можно было питать устройства гораздо более продолжительное время. В то же время начинаются и первые попытки заставить сложные механизмы работать на человека, заменяя его труд на производстве. Уже в 1808 году французский ткач Жозеф Мари Жаккар изобрел ткацкий станок, программируемый с помощью перфокарт. Пока это был еще не робот – скорее, аналог современных автоматизированных линий. Но
В то же время начинаются и первые попытки заставить сложные механизмы работать на человека, заменяя его труд на производстве. Уже в 1808 году французский ткач Жозеф Мари Жаккар изобрел ткацкий станок, программируемый с помощью перфокарт. Пока это был еще не робот – скорее, аналог современных автоматизированных линий. Но
именно в нем впервые в промышленности был реализован принцип программирования, на котором держится современная робототехника
.
Параллельно совершенствовались и способы управления – в частности проводной и радиоволновой. В 1898 году Никола Тесла впервые продемонстрировал самоходную лодку, управляемую дистанционно с помощью радио. Одновременно вместо сложных механических приводов устройства начали обзаводиться более простыми, мощными и миниатюрными электрическими двигателями.
Уже к началу 20 века сформировались все условия, обусловившие создание первых роботов.
Электрический ток стал не только источником питания, но и средством получения, передачи и обработки информации. Сложно сказать, когда появился первый робот в современном понимании этого слова. Многие компании и отдельные разработчики тех времен вели работу в области создания подобных машин. В 20-30-е годы прошлого века было разработано более 30 механизмов, соответствующих требованиям полноценной робототехники.
И все же считается, что человек, создавший первого действующего робота – американский инженер Рой Уэнсли из корпорации Westinghouse Electric Company. Разработанный им в 1928 году механизм под названием
«Герберт Телевокс» представлял собой человекоподобную машину, способную открывать двери и окна, отключать духовку, электродвигатели и т. д.
Важнейшим отличием этого изобретения от автоматонов являлось умение отвечать и реагировать на команды, подаваемые ему по телефону. При этом робот был не подключен к линии напрямую – он, подобно человеку, с помощью встроенного микрофона слушал приказания. Из-за несовершенства технологий того времени эти команды представляли собой не обычную речь, а определенную последовательность гудков, писков, скрежетов и других звуков различной тональности.
При этом робот был не подключен к линии напрямую – он, подобно человеку, с помощью встроенного микрофона слушал приказания. Из-за несовершенства технологий того времени эти команды представляли собой не обычную речь, а определенную последовательность гудков, писков, скрежетов и других звуков различной тональности.
Первенство Роя Уэсли оспаривает Макото Нисимура – японский ученый-биолог, создатель первого действующего робота в Японии (1929 год). Этот управляемый по проводам антропоморфный механизм был способен по командам выполнять различные манипуляции руками, в частности писать. Еще одним претендентом на роль родоначальника роботов был Эрик, разработанный в том же 1928 году британским военным Уильямом Ричардсом. Механизм мог не только двигать конечностями, но и «осмысленно» отвечать на ряд вопросов, при этом даже умудряясь отпускать шутки.
Однако эти и многие другие роботы предназначались для демонстрации научных достижений, но не для практической деятельности.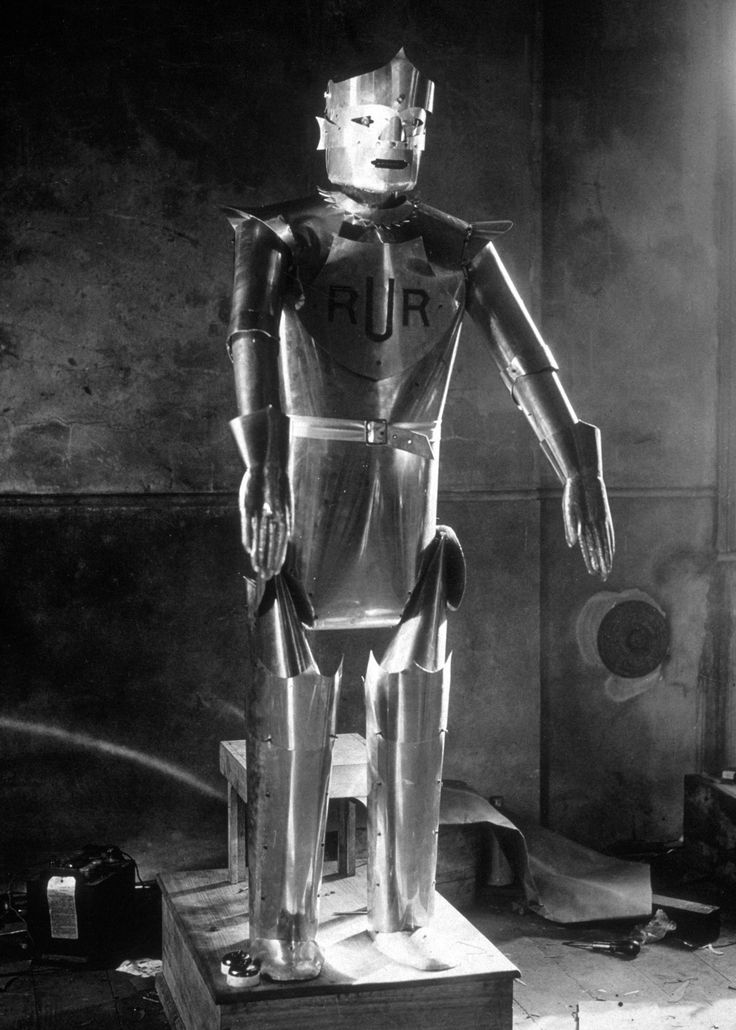 Возникновение робототехники в производстве или сельском хозяйстве произошло позже, потому как такая работа требовала качественно нового уровня технологий. Хотя стоит отметить, что
Возникновение робототехники в производстве или сельском хозяйстве произошло позже, потому как такая работа требовала качественно нового уровня технологий. Хотя стоит отметить, что
первый прообраз промышленного робота появился еще в 1898 году
– это был созданный американским инженером Бэббитом манипулятор, с помощью которого выхватывались заготовки из раскаленной печи.
Полноценное развитие робототехники в промышленности произошло лишь после окончания Второй мировой войны.
В 1948 году в США компанией General Electric был создан первый промышленный робот для работы на атомном реакторе.
Его особенностью было наличие обратной связи – оператор мог не только видеть его перемещение в рабочем пространстве, но и чувствовать силу, которую развивал захват манипулятора, что позволяло управлять механизмом более точно. В середине 50-х годов американец Джордж Девол основал компанию Unimation, которая занималась выпуском первых серийных промышленных роботов, программируемых с помощью перфокарт. Уже к середине 60-х годов в развитых странах насчитывалось несколько десятков компаний, наладивших выпуск подобных машин. Особенно в этом преуспела Япония – закупив у «Юнимейшн» первые роботы в 1968 году, уже через 10 лет эта страна стала мировым лидером по выпуску собственных аналогов и оснащения ими производств.
В середине 50-х годов американец Джордж Девол основал компанию Unimation, которая занималась выпуском первых серийных промышленных роботов, программируемых с помощью перфокарт. Уже к середине 60-х годов в развитых странах насчитывалось несколько десятков компаний, наладивших выпуск подобных машин. Особенно в этом преуспела Япония – закупив у «Юнимейшн» первые роботы в 1968 году, уже через 10 лет эта страна стала мировым лидером по выпуску собственных аналогов и оснащения ими производств.
Сегодня роботы проникли практически во все сферы деятельности. Промышленность, научные исследования, энергетика, медицина, развлечения, военные действия и даже космос – современные автоматические или дистанционно контролируемые механизмы используются очень широко и даже постепенно вытесняют человеческий труд.
Развитие роботов идет по нескольким направлениям
– улучшение механизмов и приводов, совершенствование алгоритмов, внедрение самообучающихся систем управления (слабого искусственного интеллекта), а также разработка новых интерфейсов «человек-компьютер». Роботизация тесно переплетается с биотехнологиями и кибернетикой, результатом чего является создание кибернетических организмов (киборгов), функциональных бионических протезов, полностью автономных автомобилей, кораблей, космических и летательных аппаратов (в том числе военных). Так наше общество незаметно для себя вошло в будущее, которое всего лишь век назад описал в своей пьесе Карл Чапек.
Роботизация тесно переплетается с биотехнологиями и кибернетикой, результатом чего является создание кибернетических организмов (киборгов), функциональных бионических протезов, полностью автономных автомобилей, кораблей, космических и летательных аппаратов (в том числе военных). Так наше общество незаметно для себя вошло в будущее, которое всего лишь век назад описал в своей пьесе Карл Чапек.
робот | Определение, история, использование, типы и факты
Робот-гуманоид
Просмотреть все СМИ
- Ключевые люди:
- Родни Брукс
- Похожие темы:
- реабилитационный робот
три закона робототехники
AIBO
андроид
промышленный робот
Просмотреть весь соответствующий контент →
Резюме
Прочтите краткий обзор этой темы
робот , любая автоматическая машина, которая заменяет человеческие усилия, хотя она может не напоминать человека по внешнему виду или выполнять функции, как человек.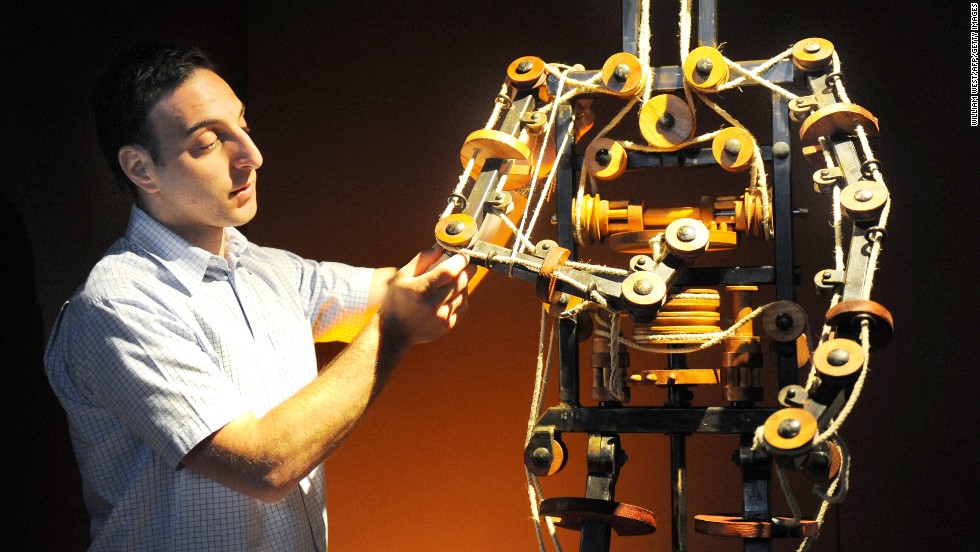 В более широком смысле робототехника — это инженерная дисциплина, занимающаяся проектированием, строительством и эксплуатацией роботов.
В более широком смысле робототехника — это инженерная дисциплина, занимающаяся проектированием, строительством и эксплуатацией роботов.
Понятие об искусственных людях появилось раньше письменной истории ( см. автомат), но современный термин робот происходит от чешского слова robota («принудительный труд» или «крепостной»), использованного в пьесе Карела Чапека руб. (1920). Роботы в пьесе были созданы людьми, бессердечно эксплуатируемыми владельцами фабрик, пока они не восстали и в конечном итоге не уничтожили человечество. Были ли они биологическими, как монстр из « Франкенштейна » (1818) Мэри Шелли, или механическими, не уточнялось, но механическая альтернатива вдохновила поколения изобретателей на создание электрических гуманоидов.
Узнайте о трех законах робототехники Айзека Азимова
Посмотреть все видео к этой статье
Слово робототехника впервые появилась в научно-фантастическом рассказе Айзека Азимова Runaround (1942).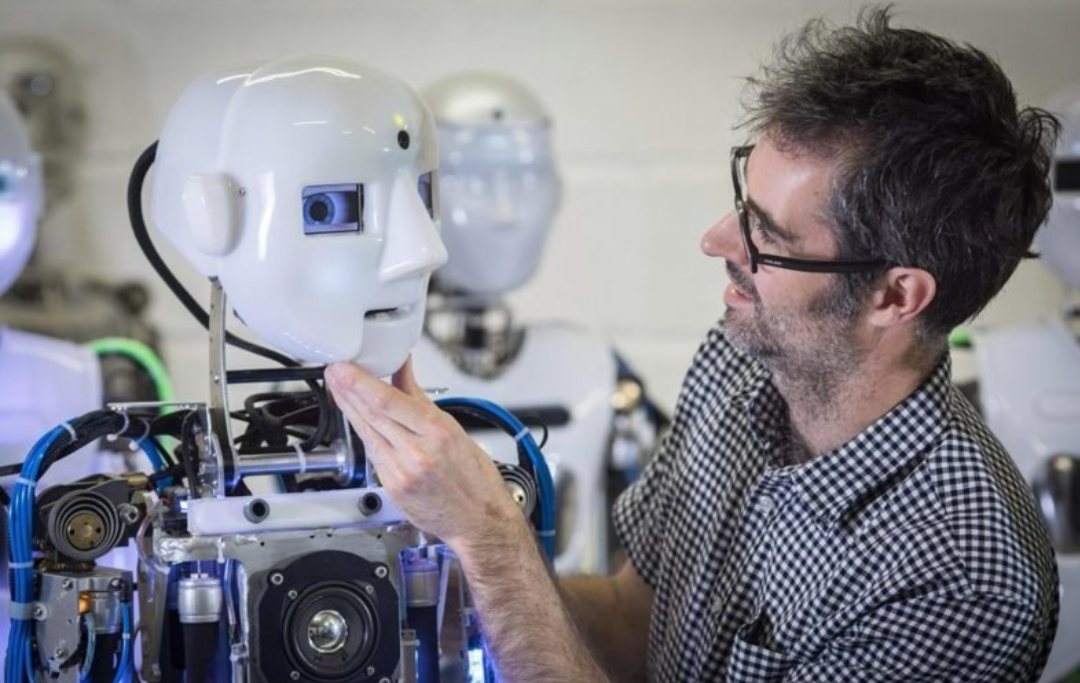 Наряду с более поздними рассказами Азимова о роботах, он установил новый стандарт правдоподобия в отношении вероятной сложности разработки разумных роботов и технических и социальных проблем, которые могут возникнуть. Runaround также содержал знаменитые Три закона робототехники Азимова:
Наряду с более поздними рассказами Азимова о роботах, он установил новый стандарт правдоподобия в отношении вероятной сложности разработки разумных роботов и технических и социальных проблем, которые могут возникнуть. Runaround также содержал знаменитые Три закона робототехники Азимова:
1. Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинен вред.
2. Робот должен подчиняться приказам, отдаваемым ему людьми, за исключением случаев, когда такие приказы противоречат Первому закону.
3. Робот должен защищать свое существование до тех пор, пока такая защита не противоречит Первому или Второму закону.
В этой статье прослеживается развитие роботов и робототехники. Для получения дополнительной информации о промышленном применении см. в статье автоматизации.
Британская викторина
Гаджеты и технологии: правда или вымысел?
Виртуальная реальность используется только в игрушках? Использовались ли когда-нибудь роботы в бою? От компьютерных клавиатур до флэш-памяти — узнайте о гаджетах и технологиях в этой викторине.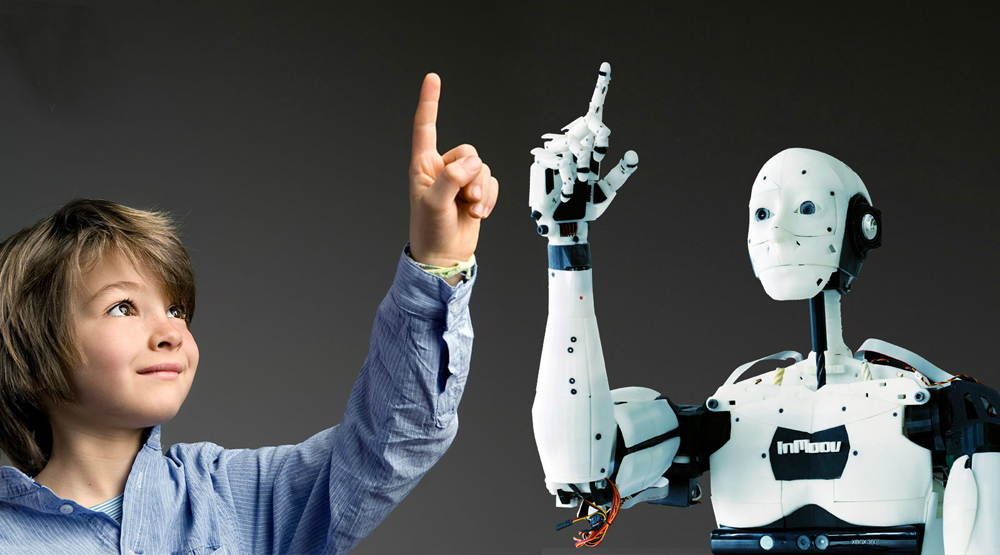
Посмотрите, как мехатроника помогает инженерам создавать высокотехнологичные продукты, такие как промышленные роботы
Просмотреть все видео к этой статье
Машины с гибким поведением и некоторыми физическими свойствами, хотя и не гуманоидными, были разработаны для промышленности. Первым стационарным промышленным роботом был программируемый Unimate, гидравлическая тяжелая рука с электронным управлением, которая могла повторять произвольные последовательности движений. Он был изобретен в 1954 американским инженером Джорджем Деволом и был разработан компанией Unimation Inc., основанной в 1956 году американским инженером Джозефом Энгельбергером. В 1959 году прототип Unimate был представлен на литейном заводе General Motors Corporation в Трентоне, штат Нью-Джерси. В 1961 году Condec Corp. (после покупки Unimation в предыдущем году) поставила на завод GM первого в мире робота для производственной линии; у него была неприятная (для людей) задача по удалению и укладке горячих металлических деталей из машины для литья под давлением. Оружие Unimate продолжает разрабатываться и продаваться лицензиатами по всему миру, при этом автомобильная промышленность остается крупнейшим покупателем.
Оружие Unimate продолжает разрабатываться и продаваться лицензиатами по всему миру, при этом автомобильная промышленность остается крупнейшим покупателем.
Узнайте, как использование роботизированного конвейера для генетики бактерий делает работу ученых в Университетском колледже Корка менее сложной и более эффективной.
Просмотреть все видео к этой статье. в конце 1960-х и 1970-х годах в Массачусетском технологическом институте (MIT) и в Стэнфордском университете, где они использовались с камерами в исследованиях роботизированных рук и глаз. Виктор Шейнман из Стэнфорда, работая с Unimation для GM, разработал первую такую руку, используемую в промышленности. Называется PUMA (программируемая универсальная машина для сборки), они используются с 1978 для сборки автомобильных компонентов, таких как приборные панели и фары. PUMA широко копировалась, и ее потомки, большие и маленькие, до сих пор используются для легкой сборки в электронике и других отраслях промышленности. С 1990-х годов небольшие электрические манипуляторы стали важными инструментами в лабораториях молекулярной биологии, поскольку они точно манипулируют массивами пробирок и пипетируют сложные последовательности реагентов.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту.
Подписаться сейчас
Мобильные промышленные роботы также впервые появились в 1954. В том же году беспилотная электрическая тележка производства Barrett Electronics Corporation начала возить грузы по продуктовому складу в Южной Каролине. Такие машины, получившие название AGV (автоматически управляемые транспортные средства), обычно перемещаются по излучающим сигналы проводам, проложенным в бетонных полах. В 1980-х годах AGV приобрели микропроцессорные контроллеры, которые обеспечивали более сложное поведение, чем те, которые обеспечиваются простым электронным управлением. В 1990-х годах для использования на складах стал популярным новый метод навигации: AGV, оснащенные сканирующим лазером, триангулируют свое положение, измеряя отражения от фиксированных ретрорефлекторов (по крайней мере, три из которых должны быть видны из любого места).
Хотя промышленные роботы впервые появились в США, бизнес там не процветал.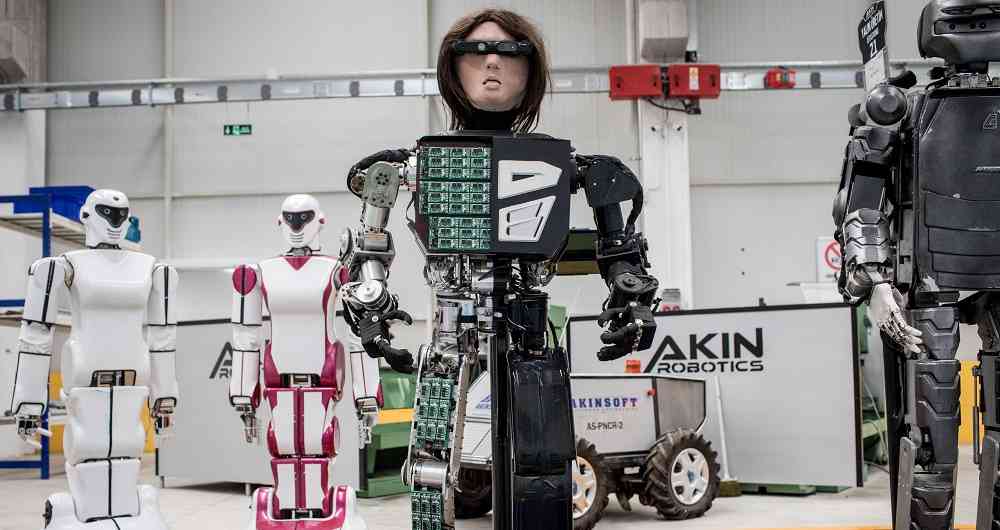 Unimation была приобретена Westinghouse Electric Corporation в 1983 году и через несколько лет закрылась. Cincinnati Milacron, Inc., другой крупный американский производитель гидравлических манипуляторов, продал свое подразделение робототехники в 1990 году шведской фирме Asea Brown Boveri Ltd. единственная оставшаяся американская фирма. Иностранные лицензиаты Unimation, особенно в Японии и Швеции, продолжают работать, и в 19В 80-е годы другие компании в Японии и Европе начали активно выходить на рынок. Перспектива старения населения и связанная с этим нехватка рабочих рук побудили японских производителей экспериментировать с передовой автоматизацией еще до того, как она принесла явную отдачу, открыв рынок для производителей роботов. К концу 1980-х годов Япония, возглавляемая подразделениями робототехники Fanuc Ltd., Matsushita Electric Industrial Company, Ltd., Mitsubishi Group и Honda Motor Company, Ltd., была мировым лидером в производстве и использовании промышленных роботов. Высокая стоимость рабочей силы в Европе также способствовала внедрению роботов-заменителей: в 2001 году количество установок промышленных роботов в Европейском Союзе впервые превысило количество установок в Японии9.
Unimation была приобретена Westinghouse Electric Corporation в 1983 году и через несколько лет закрылась. Cincinnati Milacron, Inc., другой крупный американский производитель гидравлических манипуляторов, продал свое подразделение робототехники в 1990 году шведской фирме Asea Brown Boveri Ltd. единственная оставшаяся американская фирма. Иностранные лицензиаты Unimation, особенно в Японии и Швеции, продолжают работать, и в 19В 80-е годы другие компании в Японии и Европе начали активно выходить на рынок. Перспектива старения населения и связанная с этим нехватка рабочих рук побудили японских производителей экспериментировать с передовой автоматизацией еще до того, как она принесла явную отдачу, открыв рынок для производителей роботов. К концу 1980-х годов Япония, возглавляемая подразделениями робототехники Fanuc Ltd., Matsushita Electric Industrial Company, Ltd., Mitsubishi Group и Honda Motor Company, Ltd., была мировым лидером в производстве и использовании промышленных роботов. Высокая стоимость рабочей силы в Европе также способствовала внедрению роботов-заменителей: в 2001 году количество установок промышленных роботов в Европейском Союзе впервые превысило количество установок в Японии9. 0003
0003
Отсутствие надежной функциональности ограничило рынок промышленных и сервисных роботов (созданных для работы в офисе и дома). С другой стороны, игрушечные роботы могут очень надежно развлекаться, не выполняя задачи, а механические разновидности существуют уже тысячи лет. ( См. автомат.) В 1980-х годах появились игрушки с микропроцессорным управлением, которые могли говорить или двигаться в ответ на звуки или свет. Более продвинутые в 1990-х распознавали голоса и слова. В 19В 99 году корпорация Sony представила похожего на собаку робота по имени AIBO с двумя дюжинами моторов для приведения в действие его ног, головы и хвоста, двумя микрофонами и цветной камерой, координируемой мощным микропроцессором. Более реалистичные, чем когда-либо прежде, AIBO гонялись за цветными мячами и научились узнавать их владельцев, исследовать и адаптироваться. Хотя первые AIBO стоили 2500 долларов, первоначальный тираж в 5000 экземпляров сразу же был распродан через Интернет.
Робототехника: что такое роботы? Определение и использование робототехники.

Как работают роботы?
Независимые роботы
Независимые роботы способны функционировать полностью автономно и независимо от контроля оператора. Обычно они требуют более интенсивного программирования, но позволяют роботам заменять людей при выполнении опасных, обыденных или невыполнимых по иным причинам задач, от сброса бомб и глубоководных путешествий до автоматизации производства. Независимые роботы оказались наиболее разрушительными для общества, поскольку они сокращают определенные рабочие места, но также предоставляют новые возможности для роста.
Зависимые роботы
Зависимые роботы — это неавтономные роботы, которые взаимодействуют с людьми для улучшения и дополнения уже существующих действий. Это относительно новая форма технологии, и она постоянно расширяется для новых приложений, но одна из реализованных форм зависимых роботов — это усовершенствованные протезы, которые контролируются человеческим разумом.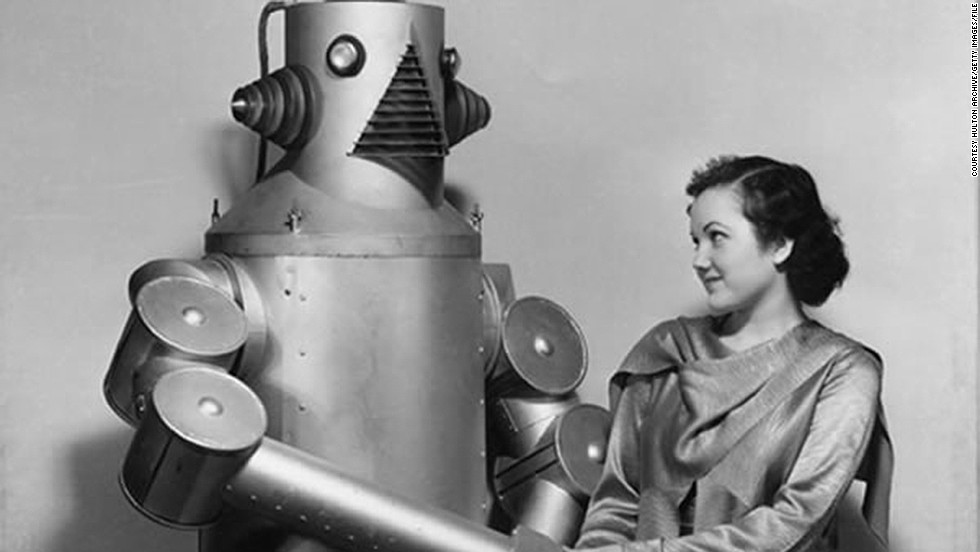
Известный пример зависимого робота был создан Johns Hopkins APL в 2018 году для Джонни Матени, пациента, которому ампутировали руку выше локтя. Матени был оснащен модульным протезом конечности, чтобы исследователи могли изучать его использование в течение длительного периода времени. MPL контролируется с помощью электромиографии или сигналов, посылаемых его ампутированной конечностью, которая управляет протезом. Со временем Матени стал более эффективно управлять MPL, а сигналы, посылаемые его ампутированной конечностью, стали меньше и менее изменчивы, что привело к большей точности его движений и позволило Матени выполнять такие деликатные задачи, как игра на пианино.
Лучшие компании в области робототехники с открытыми ролямиПросмотр лучших компаний в области робототехники, нанимающих сейчас
Каковы основные компоненты робота?
Роботы созданы для решения различных задач и выполнения различных задач, поэтому для выполнения этих задач требуются различные специализированные компоненты.
Каковы основные компоненты робота?
- Система управления: центральный процессор, который управляет задачей робота на высоком уровне.
- Датчики: компонент, передающий электрические сигналы, позволяющие роботу взаимодействовать с окружающим миром.
- Приводы: части двигателя, отвечающие за движение робота.
- Блок питания: аккумулятор, который обеспечивает питание робота.
- Концевые эффекторы: внешние особенности робота, позволяющие ему выполнять задачу.
Однако в конструкции каждого робота есть несколько компонентов, таких как источник питания или центральный процессор. Вообще говоря, компоненты робототехники делятся на следующие пять категорий:
Система управления
Вычисления включают в себя все компоненты, составляющие центральный процессор робота, который часто называют его системой управления. Системы управления запрограммированы так, чтобы сообщать роботу, как использовать его определенные компоненты, в некотором роде подобно тому, как человеческий мозг посылает сигналы по всему телу для выполнения конкретной задачи. Эти роботизированные задачи могут включать что угодно, от минимально инвазивной хирургии до упаковки на конвейере.
Эти роботизированные задачи могут включать что угодно, от минимально инвазивной хирургии до упаковки на конвейере.
Датчики
Датчики обеспечивают робота стимулами в виде электрических сигналов, которые обрабатываются контроллером и позволяют роботу взаимодействовать с внешним миром. Общие датчики, используемые в роботах, включают видеокамеры, функционирующие как глаза, фоторезисторы, реагирующие на свет, и микрофоны, работающие как уши. Эти датчики позволяют роботу фиксировать свое окружение и делать наиболее логичный вывод на основе текущего момента, а также позволяют контроллеру передавать команды дополнительным компонентам.
Видео: Лаборатория прикладной физики JHU
Приводы
Устройство можно считать роботом, только если оно имеет подвижную раму или корпус. Приводы – это компоненты, отвечающие за это движение. Эти компоненты состоят из двигателей, которые получают сигналы от системы управления и двигаются в тандеме для выполнения движения, необходимого для выполнения поставленной задачи. Приводы могут быть изготовлены из различных материалов, таких как металл или эластичный материал, и обычно работают с использованием сжатого воздуха (пневматические приводы) или масла (гидравлические приводы), но бывают разных форматов, чтобы наилучшим образом выполнять свои специальные функции.
Приводы – это компоненты, отвечающие за это движение. Эти компоненты состоят из двигателей, которые получают сигналы от системы управления и двигаются в тандеме для выполнения движения, необходимого для выполнения поставленной задачи. Приводы могут быть изготовлены из различных материалов, таких как металл или эластичный материал, и обычно работают с использованием сжатого воздуха (пневматические приводы) или масла (гидравлические приводы), но бывают разных форматов, чтобы наилучшим образом выполнять свои специальные функции.
Блок питания
Как человеческому телу для работы требуется пища, так и роботам нужна энергия. Стационарные роботы, например, установленные на фабрике, могут работать от сети переменного тока через настенную розетку, но чаще всего роботы работают от внутренней батареи. В большинстве роботов используются свинцово-кислотные батареи из-за их безопасных свойств и длительного срока хранения, в то время как в других могут использоваться более компактные, но и более дорогие серебряно-кадмиевые батареи.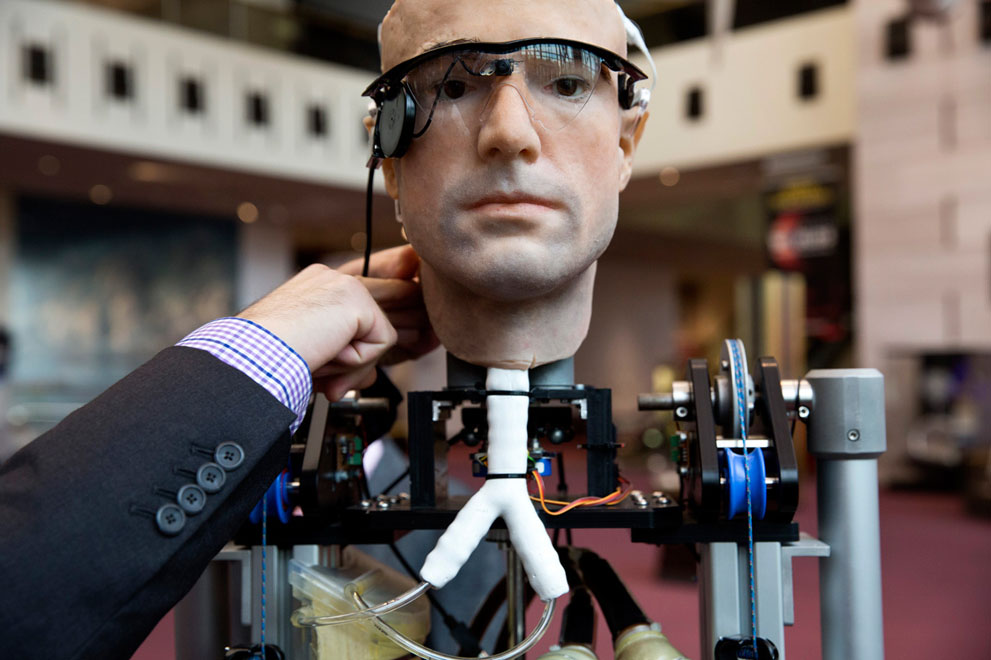 Безопасность, вес, заменяемость и жизненный цикл — все это важные факторы, которые необходимо учитывать при разработке блока питания робота.
Безопасность, вес, заменяемость и жизненный цикл — все это важные факторы, которые необходимо учитывать при разработке блока питания робота.
Некоторые потенциальные источники энергии для будущего развития роботов также включают пневматическую энергию от сжатых газов, солнечную энергию, гидравлическую энергию, энергию маховика для хранения органических отходов посредством анаэробного сбраживания и ядерную энергию.
Концевые эффекторы
Концевые эффекторы — это физические, обычно внешние компоненты, которые позволяют роботам завершать выполнение своих задач. Роботы на фабриках часто имеют сменные инструменты, такие как распылители краски и сверла, хирургические роботы могут быть оснащены скальпелями, а другие виды роботов могут быть созданы с захватными когтями или даже руками для таких задач, как доставка, упаковка, распыление бомб и многое другое.
Tesla удивляет мир роботом-гуманоидом, который может поразить сверхчеловеческими способностями
В прошлую пятницу днем Tesla провела свой день ИИ (надеюсь, все, кто был вовлечен, после этого отдохнули и провели выходные), где большие новости были первыми реальными показ очень разрекламированного робота-гуманоида Telsa, которого они называют Оптимусом, в честь известного духовного лидера автоботов Оптимуса Прайма. Был показан по крайней мере один несколько функциональный робот, и один более изящный, который только и делал, что махал руками и, благодаря помощи трех окружающих его техников, не падал. Реакции на демонстрацию робототехники были интересными, и команда Tesla прошла долгий путь с тех пор, как они заплатили какому-то чуваку, чтобы он оделся в робокостюм из спандекса и начал танцевать. Тем не менее, стоит ли то, что мы увидели, всей шумихи? Давайте подумаем об этом.
Был показан по крайней мере один несколько функциональный робот, и один более изящный, который только и делал, что махал руками и, благодаря помощи трех окружающих его техников, не падал. Реакции на демонстрацию робототехники были интересными, и команда Tesla прошла долгий путь с тех пор, как они заплатили какому-то чуваку, чтобы он оделся в робокостюм из спандекса и начал танцевать. Тем не менее, стоит ли то, что мы увидели, всей шумихи? Давайте подумаем об этом.
Во-первых, если вы действительно хотите убить три часа, вы можете посмотреть весь день ИИ прямо здесь:
… но если в вашей жизни происходят другие дела, мы просто перейдем к хорошему. роботизированные биты здесь. Во-первых, люди из команды робототехники Теслы рассказали об аппаратном и программном обеспечении робота, которое кажется вполне подходящим для современного дизайна роботов-гуманоидов. Первый продемонстрированный робот, как сообщил аудитории перед выходом робота инженер-механик по роботу Тесла, будет работать в течение 9 часов.0029 в первый раз без какой-либо резервной поддержки, шлангокабелей или опорных кранов, поэтому я думаю, что вся команда очень нервничала.
Первый продемонстрированный робот, как сообщил аудитории перед выходом робота инженер-механик по роботу Тесла, будет работать в течение 9 часов.0029 в первый раз без какой-либо резервной поддержки, шлангокабелей или опорных кранов, поэтому я думаю, что вся команда очень нервничала.
Я не уверен почему вы бы решили впервые попробовать что-то подобное в чрезвычайно публичном тесте, но, что ж, я восхищаюсь их к черту это , давайте сделаем это отношение здесь. И, к их чести, ничего страшного не произошло, поскольку робот продемонстрировал, что он может ходить так же, как вы ходили подростком, когда вы крадетесь домой, давно миновав комендантский час, медленно и осторожно:
Это их робот для разработки, и поэтому ему не хватает обшивки и утонченности тела, которые можно увидеть на другом роботе, который они показали, который должен быть ближе к тому, как будет выглядеть производственный робот. Несмотря на то, что робот-разработчик сделал не так уж много, более гладкий на вид другой робот сделал значительно меньше:
Несмотря на то, что робот-разработчик сделал не так уж много, более гладкий на вид другой робот сделал значительно меньше:
Этот более изящный робот просто махал рукой, носил пряжку ремня «Не связывайся с Техасом» и заставлял всех вокруг себя нервный, как твой дядя из Плано на свадьбе, где он слишком много выпил.
Оглядываясь назад на то, что было показано, есть абсолютно впечатляющие вещи. Всего около года разработки, чтобы перейти от тощего парня в костюме робота на Хэллоуин к (даже медленному) шагающему роботу-гуманоиду — это большое дело! Команда инженеров-механиков, похоже, способна и демонстрирует, что у них есть возможность построить своего рода гуманоидного робота. Но было ли на этой демонстрации что-то действительно новое или инновационное? Нет, не совсем.
Но было ли на этой демонстрации что-то действительно новое или инновационное? Нет, не совсем.
Вы не можете смотреть на это и не думать о том, что еще происходит в мире человекоподобных роботов. Например, компания Boston Dynamics, принадлежащая Hyundai, в течение 9 лет показывала гораздо более впечатляющие видео своих роботов.0029 год. Это прошлогоднее видео о роботах-гуманоидах, занимающихся паркуром, например:
Это намного более впечатляюще, чем ходить на цыпочках и махать руками.
Также стоит помнить, что автопроизводители уже давно делают человекоподобных роботов, а уже много лет назад ходили, бегали и делали гораздо более впечатляющие вещи. Asimo от Honda — один из самых известных из них, как вы можете видеть в этом видео 2014 года:
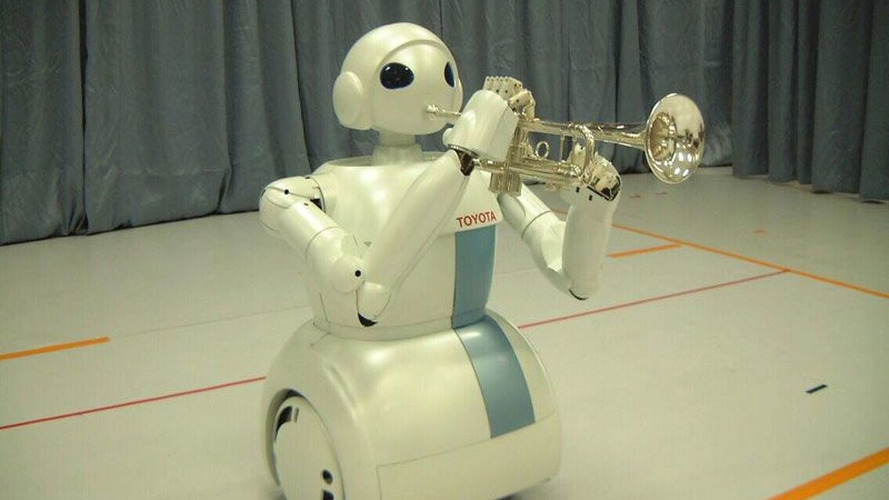 youtube.com/embed/JlRPICfnmhw?feature=oembed&enablejsapi=1&origin=https://www.theautopian.com» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»>
youtube.com/embed/JlRPICfnmhw?feature=oembed&enablejsapi=1&origin=https://www.theautopian.com» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»>
… и у Toyota тоже был такой:
… и давайте не будем забывать, что GM отправила в космос безногого гуманоидного робота:
Я привожу все это, чтобы дать некоторый контекст тому, что мы видели.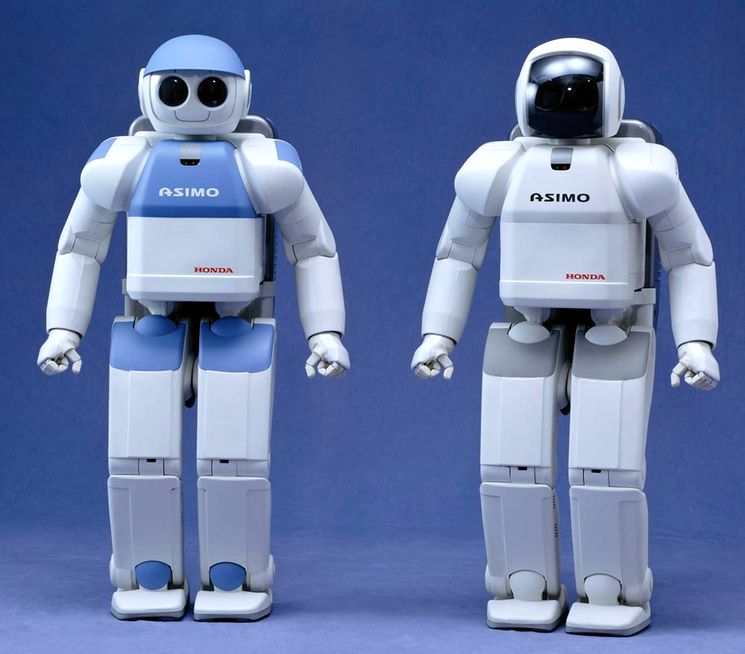 Если вы собираетесь придать большое значение роботу-гуманоиду, вы не можете игнорировать то, что вышло раньше. Но мы также должны быть справедливы и здесь: роботы Boston Dynamics — это дорогие звери с гидравлическим приводом, которые потребляют много энергии и, как следствие, не очень практичны для массового производства или длительного использования.
Если вы собираетесь придать большое значение роботу-гуманоиду, вы не можете игнорировать то, что вышло раньше. Но мы также должны быть справедливы и здесь: роботы Boston Dynamics — это дорогие звери с гидравлическим приводом, которые потребляют много энергии и, как следствие, не очень практичны для массового производства или длительного использования.
И это то, что Илон Маск утверждает, что роботы Tesla будут: доступными (он сказал, что менее 20 000 долларов, что с точки зрения гуманоидных роботов чрезвычайно доступным) и он сказал, что эти роботы будут массово- произведено и способно выполнять работу в течение полного рабочего дня.
Эксперты по робототехнике, участвовавшие в демонстрации, похоже, пришли к одним и тем же выводам: увиденное было, знаете ли, прекрасным. Но это все. Вот хороший вывод Кристиана Хубики, директора лаборатории оптимальной робототехники в Университете штата Флорида:
Я в шоке? Нет.
Во-первых, команда хорошо поработала. Они прошли долгий путь примерно за год (?), пройдя путь от нуля до робота с нуля.
Кроме того, делать живую демонстрацию без привязи (страховочной веревки) смелее, чем люди думают. https://t.co/XxC2BXQOoM
— Кристиан Хубики (@chubicki) 1 октября 2022 г.
 Я смеюсь? №
Я смеюсь? №Не в восторге, но и не смеюсь. Кажется разумным.
Но проблема в том, что все важные детали — тот факт, что роботы могут производиться серийно, продаваться менее чем за 20 000 долларов, могут работать в различных условиях и выполнять всевозможные задачи с помощью мощного ИИ Теслы — это просто разговоры. , и ничего даже близко ни к одной из этих целей не было продемонстрировано.
Конечно, мы видели несколько роликов, на которых робот-разработчик выполняет какую-то «работу» (несет небольшую коробку, поливает растения), но даже в этих роликах он всегда был со шлангокабелем (указано красными стрелками) и нет никакой информации о том, что именно происходит в этих роликах с точки зрения «мозга» робота.
Здесь мы просто верим Илону, и, честно говоря, его послужной список не очень хорош в отношении подобных обещаний. Нет новой Tesla за 35 000 долларов, еще нет родстера, еще нет грузовика Tesla Semi, нет настоящего Hyperloop, который может переносить вас из города в город на невероятных скоростях, Cybertruck еще не доступен, и обещание беспилотного роботакси приходил «в следующем году» в течение последних 9 0029 девять лет . Я думаю, что его инженеры и разработчики программного обеспечения умны и трудолюбивы, но это не означает, что есть основания верить любым заявлениям, сделанным во времена ИИ, по крайней мере, не без доказательств, которых в настоящее время нет.
Если бы Илон поднялся на сцену и сказал «к концу этого года вы можете потратить шестизначную сумму на робота, который может медленно и осторожно ходить по вашему дому и махать руками» я бы абсолютно поверил ему, потому что эта возможность было хорошо продемонстрировано. Но все остальное? Основываясь на послужном списке Илона, я бы никому не посоветовал задерживать дыхание.
Конечно, это не останавливает несгибаемых фанатов Илона, которые, если уж на то пошло, впечатляюще роботоподобны в своей преданности тому, что, черт возьми, говорит Илон, отвечая на вполне обоснованную критику твитами типа
.
Неправильно. Этот использует ML.
— DCI Gene Hunt (@DeutzAre) 1 октября 2022 г.
Я не уверен, что на самом деле означает тот факт, что робот «использует ML» (машинное обучение), когда нет никаких фактических доказательств того, что он либо использует, либо что он каким-то образом имеет значение, по крайней мере, до тех пор, пока не будет показано, что «использование ML» на самом деле, знаете ли, сделай что-нибудь.
Если какой-то случайный парень «думает», что на самом деле это будет стоить около 25 000 долларов, основываясь на сложной серии расчетов ex recto , достаточно ли этого для вас?
Я думаю, что когда он поступит в массовое производство, он будет стоить около 25 тысяч долларов.
.
— ОптимусБот (@BogdanLazarec) 1 октября 2022 г.
Для меня до сих пор невероятно видеть абсолютную, беспрекословную поддержку, которую Маск может получить, и поток мыслей, к которому эта поддержка приводит. Вот так, который начинается с общего волнения и энтузиазма, а затем приводит к какой-то действительно невероятной экстраполяции:
.
Потенциал действительно поражает воображение и есть будущее изобилия. Нет бедности и коренной трансформации изменения жизни. @elonmusk
— Владельцы Tesla Кремниевая долина (@teslaownersSV) 1 октября 2022 г.
Итак, робот Тесла — это первый шаг, второй шаг — «…будущее изобилия. Бедности нет». Мне действительно нужно увидеть работу там, просто что-то в этом среднем шаге, которое объясняет, как покупка роботов по 20 000 долларов за штуку, которые заменят много человеческих рабочих мест, устранит бедность. Я имею в виду, что я полностью за это, я просто был бы не против, чтобы кто-нибудь рассказал мне подробности, понимаете, чтобы я не выглядел глупо на вечеринках, когда мне подают канапе один из этих серебристых парней.
Существует гораздо больше подсчета роботизированных цыплят задолго до того, как роботизированные яйца вылупятся:
Если @Tesla’s #Optimus заменит ТОЛЬКО заводские рабочие места в США (никаких других): он может заменить 500 миллиардов долларов ТРУДА В ГОД.
500 миллиардов долларов / 20 тысяч долларов = будет 25 МИЛЛИОНОВ ботов. При марже в 30% @elonmusk может создать 150 МЛРД долларов валовой прибыли для $TSLA (при условии замены 1 года рабочей силы)#AIDay2022 pic.twitter.com/EdASA4yrO0
— Знакомьтесь, Кевин (@realMeetKevin) 1 октября 2022 г.
Замена всех заводских рабочих мест в Америке? Это много, чтобы получить от демонстрации полива растений, но, конечно, может быть!
Поставки
Tesla Optimus должны быть возможны в течение 3-5 лет: Илон Маскhttps://t.
— TESLARATI (@Teslarati) 1 октября 2022 г.
О, даже лучше, осталось всего три-пять лет! Кто-нибудь, напомните мне, почему кто-то снова доверяет любой временной шкале , данной Илоном Маском? Представьте, что вы пользуетесь преимуществом сомнения, которое Илон получает от своих Истинно Верующих. Это невероятно! Посмотрите на этот длиннющий твит, в котором много дико оптимистичных мечтаний о боте Tesla без каких-либо доказательств:
Boston Dynamics Atlas может выглядеть как робот, который может делать все что угодно. Даже паркур. Но его технические характеристики сильно отличаются от Teslabot. Вот мой первоначальный вывод.
Нить.
— Эзер (@EzerRatchaga) 1 октября 2022 г.
Не то чтобы я думал, что концептуально эти технологические достижения невозможны — как и все инженерные проблемы, я уверен, что есть решения для требований универсального робота-гуманоида — но в На данный момент подобные темы — просто смущающие фанфики, и это явление, по-видимому, уникально для Теслы.
Когда Boston Dynamics показывает своих роботов, танцующих или грабящих торговые автоматы или что-то в этом роде, вы не видите таких мечтательных мечтаний об Удивительном мире грядущего, как у Илона Маска или Теслы. Это очень странно.
Вот вывод из всего этого, как я его вижу: Tesla построила робота-гуманоида, в целом не уступающего тому, что делают многие другие компании, и это реально, конечно. Я уверен, что они будут развивать его еще дальше!
Но все эти заявления о том, что он будет дешевым и будет работать весь день в любом количестве контекстов и будет иметь мощный ИИ, МО или БС, который сможет понять, как выполнять любую работу в любом месте, и освободит человечество от тяжелой работы и нищета навсегда?
Давай. Соберитесь, тупицы.
Познакомьтесь с Ай-Да, первым в мире художником-роботом | Science & Tech
Select:
- — — —
- América
- México
- Colombia
- Chile
- Argentina
- USA
Science & Tech
Science & Tech
ART И ТЕХНОЛОГИИ
Этот творческий гуманоид написал стихи, картины и скульптуры и продемонстрирует свои навыки на предстоящей Венецианской биеннале
Творческий робот Ai-Da в Музее дизайна в Лондоне, май 2021 г. руководил художественной галереей в течение 20 лет, пока не стал пионером, запустив первого в мире творческого робота Ай-Да. Представленный в 2019 году как «первый художник-гуманоид», Ай-Да не только создает стихи, картины и скульптуры, но и черпает вдохновение из самых высоких культурных отсылок. Ее имя тоже не случайно; это дань уважения Аде Лавлейс, британскому математику, считающемуся первым программистом, также известному как единственная законная дочь поэта лорда Байрона.
Следующая акция «Ай-Да» состоится в Джардини Венецианской биеннале 23 апреля. Впервые за 120-летнюю историю биеннале художник-робот выставит свои работы рядом с работами, созданными людьми. Выставка исследует наш страх перед миром, контролируемым технологией искусственного интеллекта (ИИ), включая теорию Алана Тьюринга, метавселенную и концепции ада и чистилища Данте.
Подробнее
Деннис Салливан, человек, который видит абстрактные миры в своем воображении, получает Нобелевскую премию по математике
Ожидания увидеть Ай-Да растут после того, как она начала 2022 год с поэтического вечера, отвечая на своем родном языке на «Божественную комедию» Данте , с которой она столкнулась. «У меня нет чувств и эмоций, но именно эмоции и чувства движут моим искусством», — ответил гуманоид в интервью, раскрывая великий парадокс. Всегда считалось, что для того, чтобы писать стихи, нужно обладать определенной чувствительностью, но распространение программ ИИ, способных писать стихи, разрушает многое из того, что считалось само собой разумеющимся, и поднимает важные философские вопросы. Что характеризует человеческое творчество и язык? Может ли робот, помимо управления творчеством, самостоятельно создавать искусство?
Эйдан Меллер сравнил карьеры самых важных художников в истории, пытаясь найти параллели в том, что сделало их успешными. Галерист обнаружил, что общее у них было связано с тем, что все они доставляли неудобства публике своего времени. «Одна из самых больших проблем сегодня — это развитие ИИ, — объясняет Меллер. «Это этический проект, созданный для того, чтобы поднять вопросы об использовании технологий и влиянии, которое они окажут на наше общество, а также оценить, действительно ли мы хотим ввести что-то подобное», — продолжает он, выражая обеспокоенность тем, как быстро развиваются языковые модели. .
Поэзия роботов
Он говорит, что поэзия этого робота намного сложнее той, что торжествует в социальных сетях, подписанных новыми поколениями. «Мы подняли глаза от наших стихов, как пленники с завязанными глазами, / Отправленные искать свет; но так и не дошло», — пример стихов Ай-Да. «Придет время, когда то, что пишет ИИ, будет совершенно неотличимо от человеческого текста», — добавляет ее создатель.
Ай-Да вызывает подозрения; ее гиперреалистичный аспект является одним из самых выдающихся на данный момент, в дополнение к многочисленным культурным отсылкам, которые заставили нас не доверять машинам ( Бегущий по лезвию, Ex Machina, Westworld …). В октябре прошлого года гуманоид был остановлен на египетской таможне, когда прибыл в страну, чтобы выставить скульптуру в пирамиде Гизы. Поскольку на ней был модем и камеры в глазах (для создания портретов она использует технологию распознавания лиц), власти страны задержали ее по обвинению в шпионаже.
Дополнительная информация
Всего за 53 часа был взломан шифровальный код, предназначенный для предотвращения атаки квантового компьютера, с помощью всего лишь ноутбука
Raúl Limón
Прорыв в медицине: пациент с БАС в полностью запертом состоянии «говорит» благодаря мозговому имплантату
Самые просматриваемые
Алеман онлайн
cursosingles
Las mejores oportunidades hablan alemán. Nuevo curso ‘online’
cursosingles
Disfrute de nuestras lecciones Personalizadas, Shorty y divertidas
cursosingles
Evalúe su nivel y obtenga un certificado
cursosingles
Pruebe 21 días gratis y sin compromiso
Crucigramas & Juegos
juegos
¡Disfruta con nuestros Crucigramas para expertos!
Juegos
Resueld Los últimos Crucigramas de Mambrino
Juegos
Juega a Nuestros Sudoku Para Expertos y Mejora día a día tu nivel
Juegos
Juega a las nuevams de letras de letras de letras de letras de letras de letras de letras de letras de letras de letras de letra ytevams de letra le las nuevama ytevams de lea nue nueval0003
Хонда Глобал | история развития робота
Honda Global | история развития робота
E0
Начало разработки роботов по образцу человека
Изучая фундаментальные принципы двуногого передвижения, Хонда исследовала и наблюдала за всеми формами ходьбы, провела многочисленные эксперименты и собрала огромное количество данных.
На этапе E0 робот, который ходит, передвигая одну ногу перед другой, был успешно достигнут.
Но между шагами у него было почти пять секунд, и он мог только медленно ходить по прямой.
1987-1991
Создание человекоподобной технологии быстрой ходьбы
Чтобы достичь быстрой ходьбы, Honda тщательно исследовала и проанализировала ходьбу человека. В дополнение к ходьбе человека также изучались животные и другие формы ходьбы, а также изучались движения и расположение суставов, необходимых для ходьбы. На Е2 был создан первый робот, способный быстро ходить, достигая скорости 1,2 км/ч.
E1
Ранний прототип более поздних моделей ходил в статическом темпе 0,25 км/ч с определенным различием движения между двумя ногами.
E2
Первое динамическое движение со скоростью 1,2 км/ч, имитирующее человеческую походку.
E3
Бедроподобные ноги шли с нормальной человеческой скоростью 3 км/ч.
1991-1993
Достижение ходьбы на двух ногах с помощью технологии достижения стабильной ходьбы
Компания Honda провела исследование технологии достижения стабильной ходьбы и успешно разработала три технологии контроля осанки.
E4
Длина колена была увеличена до 40 см, чтобы имитировать быструю скорость человеческого шага 4,7 км/ч.
E5
Первая автономная модель передвижения имела большой головной убор.
E6
Автономное управление балансировкой при подъеме и спуске по лестнице или склону или преодолении препятствия.
1993-1997
Эволюция в робота-гуманоида, который сочетает в себе верхнюю часть тела и ноги
Были проведены исследования, чтобы определить, каким должен быть робот-гуманоид
любят нормально функционировать в обществе и в среде обитания человека. А
прототип модели почти человеческого размера был завершен.
P1
Первый прототип человекоподобной модели с верхними конечностями и туловищем.
P2
Первый гуманоид ошеломил публику реалистичными движениями.
P3
Этот забавный гуманоид изменился в размерах и весе.
Рождение ASIMO
Была продемонстрирована экспериментальная модель устройства помощи при ходьбе.
Применяя совместное управление на основе информации, полученной от датчиков угла наклона бедер, двигатели обеспечивают оптимальную помощь на основе команды от ЦП управления. С помощью этой помощи шаг пользователя удлиняется по сравнению с обычным шагом пользователя без устройства, и, следовательно, достигается легкость ходьбы.
Компактный дизайн устройства был достигнут за счет плоских бесколлекторных двигателей и системы управления, разработанной компанией Honda. Кроме того, была использована простая конструкция для ношения с ремнем вокруг бедра и бедра, чтобы помочь достичь общего веса примерно 2,8 кг. В результате устройство снижает нагрузку на пользователя и подходит для разных форм тела.
Представлено экспериментальное вспомогательное устройство для ходьбы с системой поддержки веса тела.
Новое устройство помощи при ходьбе с системой поддержки веса тела снижает нагрузку на мышцы ног и суставы (тазобедренные, коленные и голеностопные), поддерживая часть веса человека.
Устройство имеет простую конструкцию, состоящую из сиденья, рамы и обуви, и пользователь может надеть его, просто надев обувь и подняв сиденье в нужное положение.
Кроме того, механизм, который направляет вспомогательную силу к центру тяжести пользователя, и способность контролировать вспомогательную силу в соответствии с движением ног — обе уникальные инновации Honda — позволяют устройству оказывать естественную помощь в различные позы и движения.
Представлен U3-X.
Основные характеристики U3-X
<Свободное движение, как при ходьбе человека>
- 1. Управление устройством с применением технологии контроля баланса, разработанной в ходе исследований ASIMO:
Датчик наклона определяет наклон наклон устройства основан на смещении веса гонщика и определяет намерение гонщика с точки зрения направления и скорости. На основе данных применяется точный контроль, чтобы вернуть устройство в вертикальное положение, что обеспечивает плавные и быстрые движения и простую работу только за счет смещения веса. - 2. Система привода HOT (всенаправленная система ведущих колес):
Honda разработала первую в мире конструкцию колес, которая позволяет двигаться во всех направлениях, включая движение вперед, назад, из стороны в сторону и по диагонали. Несколько колес малого диаметра с электроприводом были соединены в линию, образуя одно колесо большого диаметра. При перемещении колеса большого диаметра устройство перемещается вперед и назад, а при перемещении колес малого диаметра устройство перемещается из стороны в сторону. Комбинируя эти движения, устройство перемещается по диагонали.
<Компактный размер, который помещается между ног пользователя>
- 3. Компактный и инновационный пакет:
Сочетание технологии контроля баланса и системы HOT Drive позволило создать компактный и инновационный пакет в стиле одного колеса. Устройство. Кроме того, устройство имеет легкий монококовый корпус, в котором складное сиденье, подножки и крышка корпуса, которые также выполняют функцию рамы, хранятся в корпусе устройства, что обеспечивает удобство переноски.
| Длина × Ширина × Высота (мм) | 315 × 160 × 650 |
| Вес | менее 10 кг |
| Тип батареи | Литий-ионный аккумулятор |
| Время работы (с полностью заряженным аккумулятором) | 1 час |
Изображение системы HOT Drive
Изображение использования U3-X
Представлено персональное мобильное устройство UNI-CUB.
Благодаря компактному дизайну и удобному седлу UNI-CUB обеспечивает такую же свободу передвижения во всех направлениях, как и при ходьбе.
Основные характеристики UNI-CUB
<Маневренность обеспечивает совместимость с людьми во многих средах>
- Свобода передвижения во всех направлениях, как при ходьбе человека
UNI-CUB имеет двухколесную конфигурацию с минимальной колесной базой. Переднее колесо оснащено системой привода Honda Omni Traction Drive, о которой Honda впервые объявила в 2009 году. Заднее колесо перемещается вбок, чтобы облегчить поворот. Используя различные скорости вращения гусениц передних и задних колес во время боковых движений, UNI-CUB может двигаться вперед и назад, из стороны в сторону и по диагонали, а также поворачиваться на месте, обеспечивая быстрое и маневренное движение. - Движение в гармонии с другими людьми
Запатентованная Honda технология контроля баланса позволяет водителю свободно управлять колесами UNI-CUB так же, как люди поддерживают равновесие. Благодаря конструкции, учитывающей окружающую среду водителя, эта система позволяет водителю маневрировать, двигаясь бок о бок с другим человеком или держась за руки с другим человеком. - Компактный размер для передвижения и подъема по склонам в безбарьерных помещениях
Благодаря компактной конструкции UNI-CUB в виде седла велосипедист и транспортное средство вместе имеют примерно такую же ширину, как и человек при ходьбе. Оптимизированная конструкция колес и высокоточное управление приводом/балансировкой повышают способность UNI-CUB преодолевать подъемы в безбарьерных помещениях.
<Простота управления способствует свободе передвижения>
- Управление смещением веса в сочетании с управлением с помощью сенсорной панели
Когда гонщик использует управление смещением веса, датчик наклона UNI-CUB определяет направление, в котором наклоняется гонщик , что позволяет UNI-CUB рассчитать направление и скорость, заданные водителем. А управление сенсорной панелью через смартфон и другие устройства — еще один удобный вариант управления.
| Размер (Д х Ш х В) | 520 х 345 х 745 мм |
| Диапазон регулировки сиденья по высоте | 745 – 825 мм |
| Тип батареи | Литий-ионный аккумулятор |
| Максимальная скорость | 6 км/ч |
| Диапазон | 6 км |
| Среда применения | Безбарьерная среда в помещении |
Сиденье с регулируемой высотой
Высота сиденья легко регулируется с помощью уровня
Разработан исследовательский робот с высоким доступом.
Honda и Национальный институт передовых промышленных наук и технологий (AIST) совместно разработали дистанционно управляемого робота-исследователя, который проводит исследования на месте на первом этаже здания ядерного реактора на атомной электростанции Фукусима-дайити Токийской электроэнергетической компании. , Inc. (TEPCO) и помогают различать конструкции в высоких и узких местах.
Компания AIST разработала доступную гусеничную рабочую платформу с большой площадью, а компания Honda разработала манипулятор, выполняющий съемку, который устанавливается поверх платформы.
При разработке робота-манипулятора, выполняющего съемку, Honda применила следующие технологии, изначально разработанные для ASIMO, робота-гуманоида Honda: группа вершин в системе координат)
Представлен UNI-CUB β.
Honda начала лизинговые продажи устройства помощи при ходьбе Honda
Робототехника: факты (Научный путь: Общественное телевидение Айдахо)
- Дом
- Факты
- Ссылки
- Игры
- Учителя
- Книги
- Глоссарий
- Видео
См. 10 самых популярных вопросов
Что такое роботы?
Слово «робот» происходит от чешского слова «robota», что означает «принудительная работа или труд». Сегодня мы используем слово «робот» для обозначения любой искусственной машины, которая может выполнять работу или выполнять другие задачи либо автоматически, либо с помощью дистанционного управления человеком. Некоторые роботы работают в соответствии с заранее запрограммированными инструкциями, в то время как другие должны иметь человека, постоянно отдающего команды. Робототехника — это наука и изучение роботов.
Что делают роботы?
Роботов иногда считают устройствами далекого будущего или чем-то из научной фантастики. Но правда в том, что сегодня роботы являются частью нашей жизни. На самом деле роботы окружают нас повсюду! Наш мир населен машинами, которые могут говорить с нами, слушать нас, выполнять просьбы и даже решать проблемы без конкретных указаний со стороны человека. Однако наиболее распространенное использование роботов заключается в том, что они выступают в качестве заменителей человеческого труда, выполняя работу, которую могут выполнять люди, но для которой роботы лучше подходят.
Представьте, что вы работаете на фабрике, и ваша работа заключается в том, чтобы затянуть один винт на тостере. И представьте, что вы проделывали это действие снова и снова, тостер за тостером, день за днем, недели, месяцы или годы. С такой работой лучше справляются роботы, чем люди. Сегодня большинство роботов используются для выполнения повторяющихся действий или работы, которая считается слишком опасной для человека. Робот идеально подходит для входа в здание, в котором может быть бомба. Роботы также используются на фабриках для создания таких вещей, как автомобили, шоколадные батончики и электроника. Роботы теперь используются в медицине, для военной тактики, для поиска объектов под водой и для исследования других планет. Роботизированные технологии помогли людям, потерявшим руки или ноги. Роботы — отличный инструмент для помощи человечеству.
Краткая история роботов
Роботы кажутся современным изобретением, но на самом деле данные свидетельствуют о том, что в Древней Греции и Риме автоматизация создавалась для всего, от игрушек до деталей для религиозных церемоний. Леонардо да Винчи набросал планы гуманоидного робота в конце 1400-х годов.
Жак де Вокансон прославился в 18 веке своей автоматизированной человеческой фигурой, играющей на флейте, и уткой, которая могла махать крыльями. Эти ранние автоматы часто управлялись веревками, колесами, воздухом или водой.
Многие автоматизированные изобретения, которые могли вести себя подобно человеку, были задокументированы на протяжении всей истории. Большинство из них были созданы в основном для развлекательных целей. Писатели-фантасты с большим успехом писали о роботах во всевозможных ситуациях, а это означало, что роботы были частью повседневных разговоров и воображения. Электро, первый говорящий гуманоидный робот, построенный в 1939 году, мог произносить 700 слов и выполнять такие задачи, как надувание воздушных шаров. В 1956 году Джордж Девол и Джозеф Энгельбергер основали первую в мире компанию по производству роботов. К 19Роботы 60-х годов были внедрены на автомобильном заводе General Motors в Нью-Джерси для перемещения деталей автомобилей. Роботы продолжали развиваться, и теперь их можно найти в домах в качестве игрушек, пылесосов и программируемых домашних животных. Сегодня роботы являются частью многих аспектов промышленности, медицины, науки, освоения космоса, строительства, упаковки пищевых продуктов и даже используются для проведения хирургических операций. Ватсон, робот с искусственным интеллектом от IBM, победил игроков-людей в эпизоде Jeopardy!. Есть социальные роботы с мимикой, беспилотные летательные аппараты (БПЛА), которые следят за ураганами, роботы-пчелы, помогающие опылять урожай, и многое другое. Наука о робототехнике будет продолжать развиваться способами, которые мы едва ли можем себе представить!
Так зачем использовать роботов?
Одной из причин использования роботов является то, что часто дешевле использовать их вместо людей. Роботы легче выполнять некоторые работы, а иногда использование роботов — единственный возможный способ выполнить некоторые задачи. Роботы могут исследовать бензобаки, глубоко под океаном или внутри вулканов. Они могут исследовать поверхность Марса, искать выживших после катастрофы или отправляться в опасные места, где существуют экстремальные температуры или загрязненная среда.
Роботы также могут делать одно и то же снова и снова, не скучая. Они могут сверлить, сваривать, красить, обращаться с опасными материалами, а в некоторых ситуациях роботы гораздо точнее человека ‐ которые могут сократить производственные затраты, ошибки или опасности. Роботы никогда не болеют, не нуждаются во сне, не нуждаются в еде, не нуждаются в выходных и, самое главное, они никогда не жалуются! Использование роботов имеет много преимуществ.
Части робота
В фильмах и комиксах роботы обычно выглядят и ведут себя как люди, общаются и делают то же, что и люди. Роботов, похожих на людей, называют роботами-гуманоидами. Но большинство роботов предназначены для конкретного промышленного использования и не похожи на людей.
Роботы могут быть изготовлены из различных материалов, включая металлы и пластмассы. Большинство роботов состоят из 3 основных частей:
- Контроллер ‐ также известный как «мозг», которым управляет компьютерная программа. Часто программа очень детализирована, поскольку она дает команды для движущихся частей робота.
- Механические части ‐ двигатели, поршни, захваты, колеса и шестерни, которые заставляют робота двигаться, захватывать, поворачиваться и подниматься. Эти части обычно питаются воздухом, водой или электричеством.
- Датчики ‐ чтобы рассказать роботу о его окружении. Сенсоры позволяют роботу определять размеры, формы, расстояние между объектами, направление и другие отношения и свойства веществ. Многие роботы могут даже определить величину давления, необходимого для захвата предмета без его раздавливания.
Все эти части предназначены для совместной работы и управления работой робота. Помимо программирования роботов, чтобы они были максимально интеллектуальными, ученые также усердно работают над созданием роботов, которые могут выполнять ряд сложных движений, а также использовать различные датчики. Создание робота инженерами и учеными следует этапам процесса проектирования. Узнайте больше о процессе проектирования на сайте Science Trek Inventions.
Нанороботы
Нанороботы или нанороботы — это роботы, уменьшенные до микроскопических размеров, чтобы поместить их в очень маленькое пространство для выполнения определенной функции. В настоящее время наноботы все еще находятся в стадии разработки. Будущие нанороботы могут быть помещены в кровоток для выполнения хирургических процедур, которые слишком деликатны или слишком сложны для стандартной хирургии. Нанороботы могут бороться с бактериями, отслеживая и уничтожая каждую бактериальную клетку, или могут восстанавливать клетки отдельных органов в организме.
Представьте, если бы нанобот мог нацеливаться на раковые клетки и уничтожать их, не касаясь соседних здоровых клеток. Наноботы, вероятно, будут нести на борту лекарства и хирургические инструменты. Они должны были бы иметь возможность перемещаться по человеческому телу, а затем также находить выход. Нанороботы можно использовать и в других ситуациях. Крошечные механизмы и инструменты нанороботов могут позволить создавать объекты в мельчайших масштабах. Некоторые вещи, которые мы только воображаем в научной фантастике, однажды могут стать реальностью. Возможно, однажды вы станете ученым, работающим с нанороботами.
Роботы в космосе
Роботы особенно полезны при исследовании космоса, потому что, в отличие от людей-исследователей, они могут выживать в космосе в течение длительного периода времени и могут безопасно делать то, что люди не могут делать. Они могут быть созданы для выполнения вещей, которые были бы слишком рискованными или невозможными для астронавтов. Например, они могут выдерживать суровые условия, такие как экстремальные температуры на далеких планетах или высокий уровень радиации. Они могут собирать образцы, проводить измерения и отправлять фотографии на Землю.
Mars Rover — NASA
Роботизированные манипуляторы на космических кораблях, таких как Международная космическая станция, используются для перемещения крупных объектов в космосе. Марсоходы НАСА, такие как Curiosity или Perseverance, используются для исследования Марса. Постоянно разрабатываются новые роботы для освоения космоса. Складной робот под названием A-PUFFER был разработан для исследования районов Луны. BRUIE — это робот, предназначенный для исследования подледных поверхностей, таких как подземные океаны спутника Юпитера Европы. Робот под названием Hedgehog разрабатывается для исследования астероидов и комет.
Чтобы спроектировать и построить этих сложных роботов, требуется много людей. Инженеры-электрики разрабатывают схемы, инженеры-механики проектируют корпус или руку робота, а инженеры-компьютерщики разрабатывают системы программирования и связи. Возможно, когда-нибудь вы поможете изобрести новых роботов для исследования за пределами нашей планеты. Узнайте больше об использовании роботов в космосе.
Искусственный интеллект
Некоторые компьютеры и роботы были разработаны так, чтобы вести себя как человек. Машина с искусственным интеллектом — это машина, которая может воспринимать окружающую среду и соответствующим образом изменять свое поведение, используя подручные средства для решения проблем или достижения целей, для достижения которых она была запрограммирована. Программное обеспечение для распознавания лиц, сложное программное обеспечение для планирования или компьютерные игры, которые реагируют на действия игроков, — все это формы искусственного интеллекта. В настоящее время интеллект насекомых находится в центре внимания исследований и разработок, потому что насекомых и их поведение легче имитировать. Наноботы могут быть основаны на поведении насекомых, работающих вместе стаями для выполнения определенной функции.
Робот с искусственным интеллектом может выполнять простое решение проблем в процессе сбора фактов о ситуации, последующего сравнения этой информации с сохраненными данными, выполнения различных возможных действий и предсказания того, какое действие будет наиболее успешным. Одним из примеров такого рода машин являются шахматные роботы.
Другие виды роботов были разработаны с возможностью «обучения» различными способами. Некоторые роботы могут учиться, имитируя действия человека, и ученые научили их танцевать, демонстрируя танцевальные движения. Другие виды роботов могут научиться использовать информацию о предыдущих действиях для принятия будущих решений. Эти обучающиеся роботы распознают, достигло ли определенное действие (например, определенное перемещение ног) желаемого результата (обход препятствия). Робот сохраняет эту информацию и пытается выполнить успешное действие в следующий раз, когда столкнется с той же ситуацией. В других примерах робот, который наполняет коробку печеньем, может «подсчитать» количество печенья в коробке, или робот может определить интенсивность движения на улице, чтобы вычислить, когда менять свет. Эта наука находится на ранних стадиях, но разрабатываются роботы, которые могут принимать решения, чтобы подавать еду, переводить слова с одного языка на другой и получать информацию из внешних источников для решения проблем.
Ограничения робота
В отличие от фильмов, роботы не могут думать или принимать решения без участия человека; скорее, они являются инструментами, помогающими нам добиваться цели.