Содержание
Основные характеристики бионического протеза ИНДИ
Подать заявку на протезирование
Современная бионика
ИНДИ относится к роботизированной линейке протезов с одним видом схвата. Протез управляется с помощью датчиков, а закрытие и раскрытие кисти выполняется небольшим, но мощным электродвигателем. Протез подходит для людей с отсутствием кисти и культей предплечья.
Пользователи бионических протезов ИНДИ
Заполнить анкету на бесплатное протезирование
Основные характеристики протеза
Чуткая система управления
Скоростью и силой схвата можно управлять пропорционально силе напряжения мышц, это позволяет брать хрупкие предметы, не боясь сломать их.
Функциональный гаджет
Протезы пока не научились повторять мелкую моторику человека, но с помощью дополнительных расширений функционал протеза уже превосходит человеческую руку. В протез можно встроить бесконтактную оплату покупок, экран, GSM-модуль и многое другое.
Время работы
Емкости батареи хватает на несколько дней работы протеза, а полностью зарядить аккумулятор получится за 3 часа. На протезе расположен индикатор текущего состояния батареи, поэтому вы будете знать текущий заряд.
Раскрытие кисти до 100 мм.
Пассивная ротация кисти до 180°
Схват в щепоть для захвата предметов
Тачскрин напальчник
Приложение для настройки
Приложение для настройки параметров линейки бионических протезов компании Моторика С помощью приложения можно выбирать режим работы девайса, а также включать дополнительные опции, которые помогают упростить работу с биоэлектрическим протезом кисти в повседневной жизни.
В соответствии с Федеральным законом от 24.11.1995 № 181-ФЗ «О социальной защите инвалидов в Российской Федерации»:
Обеспечение бионикой ИНДИ идет за счёт средств федерального бюджета. Услуга доступна для граждан РФ. Мы помогаем со всеми документами.
| Подать заявку |
Обеспечение бионикой ИНДИ идет за счёт средств федерального бюджета. Услуга доступна для граждан РФ. Мы помогаем со всеми документами.
Услуга доступна для граждан РФ. Мы помогаем со всеми документами.
| Подать заявку |
Протез, про который рассказывают:
Принцип работы бионической руки
Система управления бионическим протезом работает с помощью электродов, считывающих электрический потенциал с мышц культи в момент их сокращения. Информация с датчиков передается на микропроцессор кисти и через компьютерные алгоритмы преобразуется в двигательные команды. В результате протез выполняет сжатие или разжатие пальцев.
Внешний вид
Внешняя гильза изготавливается по индивидуальному гипсовому слепку с возможностью выбора цвета и рисунка. В базовом исполнении протез используется с косметической оболочкой, которая имитирует человеческую руку.
Дизайн версия протеза ИНДИ
Дизайн версия протеза используется без косметической оболочки и пользователю при заказе доступен выбор цветов элементов протеза. Рассмотреть протез со всех сторон и настроить его внешний вид можно через онлайн-конструктор.
Рассмотреть протез со всех сторон и настроить его внешний вид можно через онлайн-конструктор.
Перейти
Истории пользователей протезов ИНДИ
Дополнительные возможности бионики
Функционал современных протезов «Моторики» постоянно совершенствуется и обновляется. Биоэлектрический протез теперь напоминает современный мини-компьютер. Дополнительные опции обсуждаются отдельно при заказе протеза.
Бесконтактная оплата
Банковский мини-таг, с помощью которого можно в одно касание расплачиваться в магазинах или общественном транспорте. Для оплаты используется технология PayPass.
Мониторинг состояния
GSM-модуль для удаленного мониторинга состояния протеза, выявления неисправностей, обновления прошивки миоэлектрического протеза.
Мы в социальных сетях
Если у вас есть вопросы — мы поможем разобраться
Назначение и сертификация
Протез ИНДИ — это медицинское изделие, которое изготавливается по индивидуальным заказам. Имеются противопоказания по использованию, необходимо получение консультации специалиста.
Имеются противопоказания по использованию, необходимо получение консультации специалиста.
Изделие имеет сертификацию на территории Евросоюза.
Скачать
Протез разработан при поддержке Фонда содействия инноваций
Особенности протезирования
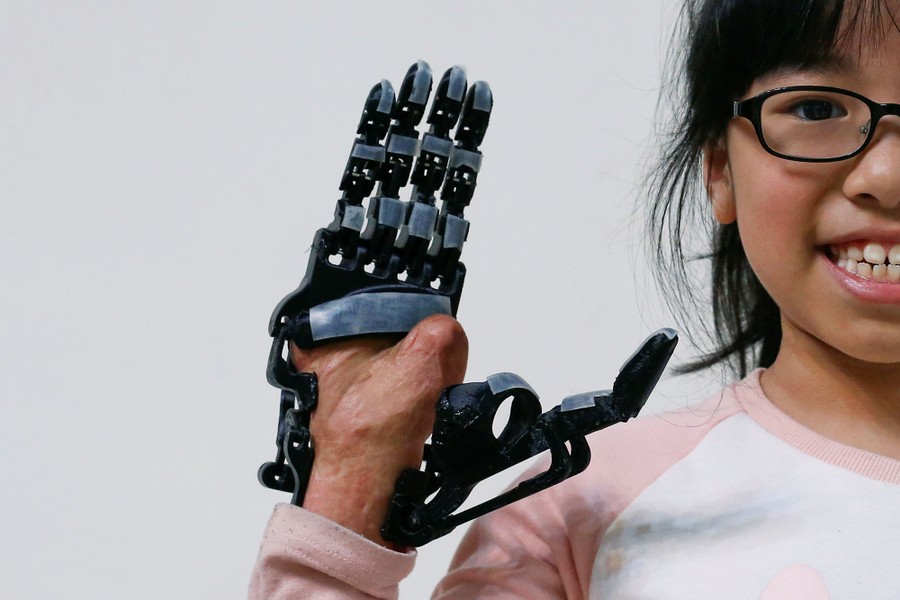
Бионические протезы ИНДИ подходят для детей от 8 лет и взрослых с отсутствием кисти и культей предплечья. Имеются противопоказания по использованию, необходимо получение консультации специалиста.
Заполнить анкету на протезирование
Подростковое протезирование
от 12 до 18 лет
| Подробнее |
Взрослое протезирование
всех возрастов
| Подробнее |
Протезы верхних конечностей любой сложности для детей, подростков и взрослых
Как выбрать протез руки?
У людей с ампутированными конечностями или врожденными особенностями развития руки есть выбор: жить без протеза, использовать косметический, функциональный тяговый или бионический протез.
Оставить заявку на консультацию
без протеза
косметический протез
функциональный тяговый протез
бионический протез
Жить без протеза
Это личное решение каждого и заслуживающий уважения выбор. Но перед тем как отказываться от возможностей, которые дают современные протезы рук, важно проконсультироваться с опытным протезистом.
Специалист детально изучит ситуацию и обозначит возможные риски – чрезмерная нагрузка на здоровую руку приводит к асимметрии корпуса, искривлению осанки и уменьшению мышечной массы на оставшейся части конечности.
Протезы рук от Моторика, изготовленные индивидуально под ваш случай, помогают избежать ухудшения состояния здоровья, возвращают утраченные функции и, что немаловажно, обеспечивают психологический комфорт.
Косметический протез
Муляж только похож на настоящую руку, но на этом его возможности и польза для человека заканчивается.
Даже самая качественная косметика – всегда остается просто маскировкой.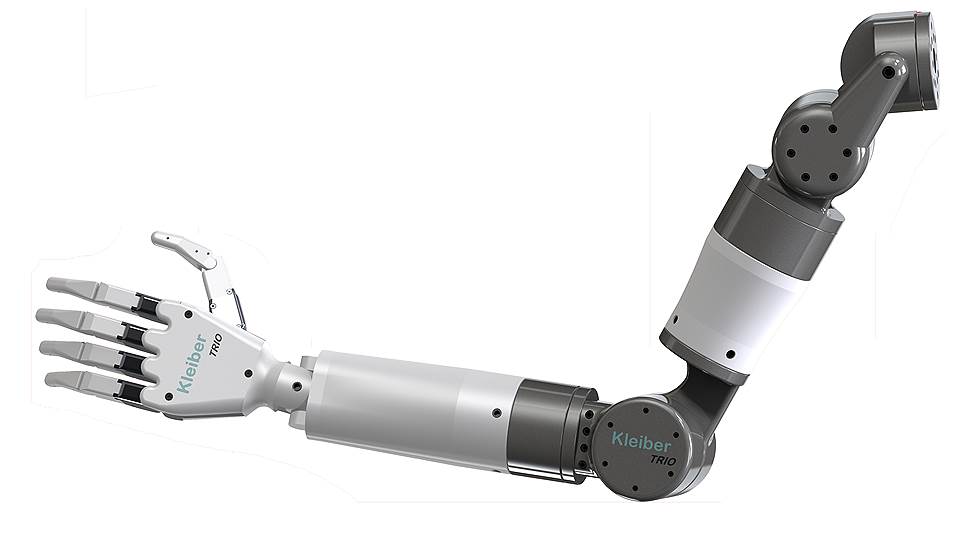 Сравнивать косметические типы протезов
Сравнивать косметические типы протезов
с управляемыми рабочими моделями – бессмысленно, тем более, косметическую оболочку можно надеть на большинство современных бионических протезов.
Функциональный тяговый протез
Бионические кибер протезы нового поколения
Современные решения, которые не просто восстанавливают утраченные возможности пациента, но и расширяют их.
Мы разрабатываем и производим бионические руки, включающие двигатель и аккумулятор. Управление функциональным протезом происходит посредством датчиков, считывающих мышечные импульсы. Другими словами, скорость и сила схвата бионической руки прямо пропорциональна силе напряжения мышц пользователя.
Как результат, используя наши бионические протезы, человек может бережно брать хрупкие предметы без риска их повредить.
Как выбрать производителя протезов рук?
Предприятия, занимающиеся протезированием, должны соответствовать ряду критериев: онлайн консультации, возможность получить протез в вашем городе, опыт техников-протезистов, дизайн протеза, техобслуживание, сообщество пользователей протезов
Есть вопросы, сомнения, опасения? Не нужно никуда ехать или звонить – всё, что вас волнует, можно спросить/уточнить/выяснить в режиме онлайн.:no_upscale()/cdn.vox-cdn.com/uploads/chorus_asset/file/6615425/Screen_Shot_2016-06-08_at_12.14.16_PM.0.png) Перед поездкой в клинику воспользуйтесь онлайн консультацией.
Перед поездкой в клинику воспользуйтесь онлайн консультацией.
В силу жизненных обстоятельств, не каждый готов преодолеть сотни, а то и тысячи километров, чтобы получить протез руки. Свяжитесь с менеджерами компании и узнайте, как забрать современный кибер гаджет, не покидая родного города.
В случае ампутации или аплазии руки универсального решения быть не может. Выбирая компанию, в первую очередь, оцените опыт протезистов – специалистов по установке протезов. Проверьте их сертификаты от производителя.
Профессионалы предложат несколько вариантов с учетом ряда факторов, начиная от образа жизни, и заканчивая индивидуальными ожиданиями использования протеза. Одно дело, когда человек заказывает первый в жизни гаджет, и совсем другое, когда является продвинутым пользователем.
Выбирая протез руки, далеко не все стремятся к абсолютной анатомической идентичности.
Если для вас первостепенную роль играет внешний вид гаджета, обратите внимание на Indy Design. Это направление транслирует самые креативные и технологически сложные решения, в том числе руки супергероев и продвинутый киберпанк. Прятаться и скрываться – это не про нас.
Это направление транслирует самые креативные и технологически сложные решения, в том числе руки супергероев и продвинутый киберпанк. Прятаться и скрываться – это не про нас.
Психологическая поддержка при ампутации, повреждениях и нарушениях здоровья – мега важный фактор.
Если есть возможность делиться переживаниями, проблемами, радостями и достижениями с теми, кто оказался в похожей ситуации, процесс принятия и адаптации к протезу проходит в разы быстрее.
Даже самый новый высокотехнологичный протез со временем потребует сервисного обслуживания. В силу этого выбирайте производителя, который предоставляет сервисную поддержку именно в вашем регионе.
Согласитесь, жить 2-3 месяца без протеза, отправленного для ремонта в город производителя, крайне неудобно.
Сегодня высокотехнологичные функциональные протезы рук доступны каждому.
Подростковое протезирование
Современные активные и бионические протезы для подростков
Подробнее Взрослое протезирование
Функциональные активные и бионические протезы для взрослых
Подробнее Детское протезирование
Кибипротезы пальцев, кисти и предплечья для детей
Подробнее
Протез руки следующего поколения: от биомиметики к биореалистичности Yu Wang,
5,6 Ting Zhang, 7 Peng Fang, 8
и Chih-hong Chou 1,2
1 Институт медицинской робототехники, Шанхайский университет Тун Цзи
2 Лаборатория инженерной нейрореабилитации, Школа биомедицинской инженерии, Шанхайский университет Цзяо Тонг, Шанхай, Китай
3 Отделение реабилитационной медицины, больница Жуйцзинь, медицинский факультет Шанхайского университета Цзяо Тонг, Шанхай, Китай
4 Центр передового опыта в области изучения мозга и интеллектуальных технологий Китайской академии наук, Шанхай, Китай
5 Школа биологических наук и медицинской инженерии, Бейханский университет, Пекин, Китай
6 Пекинский передовой инновационный центр биомедицинской инженерии, Школа биологических наук и медицинской инженерии, Бейханский университет, Пекин, Китай
7 i-lab, Ключевая лаборатория многофункциональных наноматериалов и интеллектуальных систем, Сучжоуский институт нанотехнологий и нанобионики, Китайская академия наук, Сучжоу, Китай
8 Шэньчжэньский институт передовых технологий, Китайская академия наук, Шэньчжэнь, Китай. Имитация анатомической структуры или внешнего вида человеческой руки не приводит к улучшению нейронной связи с сенсомоторной системой людей с ампутированными конечностями. Функции современных протезов рук не соответствуют ловкости руки человека, в первую очередь из-за отсутствия сенсорной осведомленности и податливого срабатывания. В последнее время прогресс в восстановлении сенсорной обратной связи стал значительным шагом вперед в улучшении нейронной непрерывности сенсорной информации от протезов рук до людей с ампутированными конечностями. Тем не менее, было предпринято мало усилий, чтобы воспроизвести свойство податливости биологических мышц при приведении в действие протезов рук. Более того, полноценный биореалистичный подход к проектированию протезов рук не рассматривался в исследованиях нейропротезов. В этой перспективной статье мы продвигаем новый взгляд на то, что протез руки может гармонично интегрироваться с людьми с ампутированными конечностями только в том случае, если будет достигнута нейронная совместимость с сенсомоторной системой.
Имитация анатомической структуры или внешнего вида человеческой руки не приводит к улучшению нейронной связи с сенсомоторной системой людей с ампутированными конечностями. Функции современных протезов рук не соответствуют ловкости руки человека, в первую очередь из-за отсутствия сенсорной осведомленности и податливого срабатывания. В последнее время прогресс в восстановлении сенсорной обратной связи стал значительным шагом вперед в улучшении нейронной непрерывности сенсорной информации от протезов рук до людей с ампутированными конечностями. Тем не менее, было предпринято мало усилий, чтобы воспроизвести свойство податливости биологических мышц при приведении в действие протезов рук. Более того, полноценный биореалистичный подход к проектированию протезов рук не рассматривался в исследованиях нейропротезов. В этой перспективной статье мы продвигаем новый взгляд на то, что протез руки может гармонично интегрироваться с людьми с ампутированными конечностями только в том случае, если будет достигнута нейронная совместимость с сенсомоторной системой. Наши текущие исследования подтверждают, что протез руки следующего поколения должен включать в себя биологически реалистичные исполнительные, сенсорные и рефлекторные функции, чтобы полностью достичь нейронной совместимости.
Наши текущие исследования подтверждают, что протез руки следующего поколения должен включать в себя биологически реалистичные исполнительные, сенсорные и рефлекторные функции, чтобы полностью достичь нейронной совместимости.
1. Исходная информация
Современные протезы рук имитируют анатомическую структуру и внешний вид человеческой руки, но упускают из виду биологические основы приведения в действие и восприятия, таким образом, у них отсутствуют аналогичные функциональные возможности сенсомоторной системы человека. Многие люди с ампутированными конечностями отказываются от протезов рук из-за трудностей с контролем и отсутствия тактильного восприятия при захвате предметов [1]. Сложный протез руки часто работает не лучше, чем простой захват, приводимый в действие контралатеральным плечом через трос, который обеспечивает расширенную физиологическую проприоцепцию (ППП) [2]. Жесткая двигательная активация не дает протезу руки податливости для захвата мягких или хрупких предметов.
Люди разработали эффективные стратегии ловкого контроля хвата рук без детального планирования движений на исполнительном/эффекторном уровнях. Биологические механизмы возникают в результате податливой активации мышц и богатых сенсорных афферентов от проприорецепторов и кожных рецепторов. Эти преимущества биологического сенсомоторного контроля позволяют адаптивно приспосабливать жесткость рук к пальцам к жесткости захваченного объекта без точного планирования движений пальцев. Здесь мы продвигаем мнение о том, что восстановление биологически реалистичной податливой активации и тактильной сенсорной обратной связи в протезной руке может трансформировать функции захвата протеза [3-7].
2. Сенсомоторный контроль человека
Сенсомоторный контроль человека служит идеальной моделью для протезов рук. Иерархическая метафора биологического моторного контроля, показанная на рис. 1(а), может помочь преодолеть разрыв в понимании моторного контроля между человеком и робототехникой/протезированием. Верхний уровень мозга программирует грубые аспекты движений в суставах или конечных точках конечностей. Затем движения преобразуются в конкретные двигательные команды для мышц на уровне позвоночника за счет мышечной синергии [8]. Интернейроны, особенно проприоспинальные нейроны (PN) [9, 10], в спинном мозге может формироваться такой модуль мышечных синергий. На нижнем уровне двигательные команды выполняются мышцами, действующими на суставы конечностей. Мозг хорошо информирован проприоцепторами и кожными рецепторами, которые контролируют процесс и результат захвата руки. Однако ампутация нарушает как эфферентные, так и афферентные сенсомоторные сигналы. Достижение биологического срабатывания, восприятия и контроля, подобных сенсомоторной системе человека, влечет за собой восстановление нарушенных периферических сенсомоторных процессов.
Верхний уровень мозга программирует грубые аспекты движений в суставах или конечных точках конечностей. Затем движения преобразуются в конкретные двигательные команды для мышц на уровне позвоночника за счет мышечной синергии [8]. Интернейроны, особенно проприоспинальные нейроны (PN) [9, 10], в спинном мозге может формироваться такой модуль мышечных синергий. На нижнем уровне двигательные команды выполняются мышцами, действующими на суставы конечностей. Мозг хорошо информирован проприоцепторами и кожными рецепторами, которые контролируют процесс и результат захвата руки. Однако ампутация нарушает как эфферентные, так и афферентные сенсомоторные сигналы. Достижение биологического срабатывания, восприятия и контроля, подобных сенсомоторной системе человека, влечет за собой восстановление нарушенных периферических сенсомоторных процессов.
Мышцы обладают сильно нелинейной биомеханикой с силой, зависящей от длины пучка и скорости сокращения, что приводит к желательному соответствию жесткости и вязкости. Вязкоупругость мышц дополнительно регулируется локальными рефлекторными цепями в пулах α -мотонейронов спинного мозга [11]. Это позволяет мозгу поддерживать равновесное положение конечностей. Податливая конечность способна справляться с неожиданными нарушениями во время движения или позы, так что мозгу не нужно явно вычислять силы и траектории конечности.
Вязкоупругость мышц дополнительно регулируется локальными рефлекторными цепями в пулах α -мотонейронов спинного мозга [11]. Это позволяет мозгу поддерживать равновесное положение конечностей. Податливая конечность способна справляться с неожиданными нарушениями во время движения или позы, так что мозгу не нужно явно вычислять силы и траектории конечности.
В мышцы встроены проприорецепторы, т.е. веретена и сухожильные органы Гольджи (GTO), которые чувствительны к растяжению и силе мышц [12]. Веретена иннервируются многочисленными γ -статическими и γ -динамическими мотонейронами, которые модулируют чувствительность веретена. γ мотонейронов комодулируются с α мотонейронами для обновления периферических мышц о кинематике запрограммированного движения мозга [13].
Зрение вычисляет местоположение статических или движущихся объектов в пространстве, что используется мозгом для планирования и направления сенсомоторных действий при дотягивании и захвате. Проприоцептивные афференты информируют мозг о состоянии мышц и положении конечностей при выполнении двигательных планов [12]. Тактильная информация от кожных рецепторов позволяет мозгу различать физические свойства захваченных объектов. Он обеспечивает мозг мультимодальностью чувств, таких как прикосновение, давление, текстура, температура и боль, чтобы человек мог эффективно манипулировать мягкими или острыми объектами. Рука без тактильных ощущений должна находиться под замкнутым контролем визуального наблюдения. Поэтому необходимо восстановить нервно-мышечный рефлекс и тактильную чувствительность у ампутантов, у которых частично доступны мышцы конечностей и полностью утрачена тактильная чувствительность руки.
Проприоцептивные афференты информируют мозг о состоянии мышц и положении конечностей при выполнении двигательных планов [12]. Тактильная информация от кожных рецепторов позволяет мозгу различать физические свойства захваченных объектов. Он обеспечивает мозг мультимодальностью чувств, таких как прикосновение, давление, текстура, температура и боль, чтобы человек мог эффективно манипулировать мягкими или острыми объектами. Рука без тактильных ощущений должна находиться под замкнутым контролем визуального наблюдения. Поэтому необходимо восстановить нервно-мышечный рефлекс и тактильную чувствительность у ампутантов, у которых частично доступны мышцы конечностей и полностью утрачена тактильная чувствительность руки.
3. Биореалистический подход с использованием новейших технологий
Основным недостатком современной протезной системы по сравнению с человеческими конечностями является то, что эфферентная двигательная информация от мозга и афферентная сенсорная информация к мозгу прерываются, а приводы протеза представляют собой электродвигатели без уступчивая гибкость нервно-мышечной системы человека. Для восстановления функций нервной системы разработано множество имплантируемых технологий [3, 4, 7, 14, 15]. Мы сосредоточены на разработке неинвазивных и биореалистичных технологий для протезов рук следующего поколения. Рисунок 1(b) иллюстрирует потенциальный биореалистичный подход к разработке протеза руки следующего поколения. Цель состоит в том, чтобы улучшить нейронную совместимость [16] путем восстановления нарушенного нервно-мышечного рефлекса и тактильной чувствительности. К числу таких новых технологий относятся следующие:
Для восстановления функций нервной системы разработано множество имплантируемых технологий [3, 4, 7, 14, 15]. Мы сосредоточены на разработке неинвазивных и биореалистичных технологий для протезов рук следующего поколения. Рисунок 1(b) иллюстрирует потенциальный биореалистичный подход к разработке протеза руки следующего поколения. Цель состоит в том, чтобы улучшить нейронную совместимость [16] путем восстановления нарушенного нервно-мышечного рефлекса и тактильной чувствительности. К числу таких новых технологий относятся следующие:
(i) Генеративные модели BMI декодирования двигательных сигналов: модель генеративного интерфейса мозг-машина (BMI) может обеспечить стратегию упреждающего управления для более биомиметического и гибкого управления нейропротезом для достижения и захвата [17, 18]. Эта технология находится на стадии оценки у нечеловекообразных приматов. (ii) Распознавание двигательных намерений с помощью ЭМГ высокой плотности: новые методы распознавания образов могут улучшить прогнозирование двигательных намерений на основе сигналов электромиограммы высокой плотности (ЭМГ) остаточных мышц в ампутированной конечности, что позволяет интуитивное управление движениями протеза [19].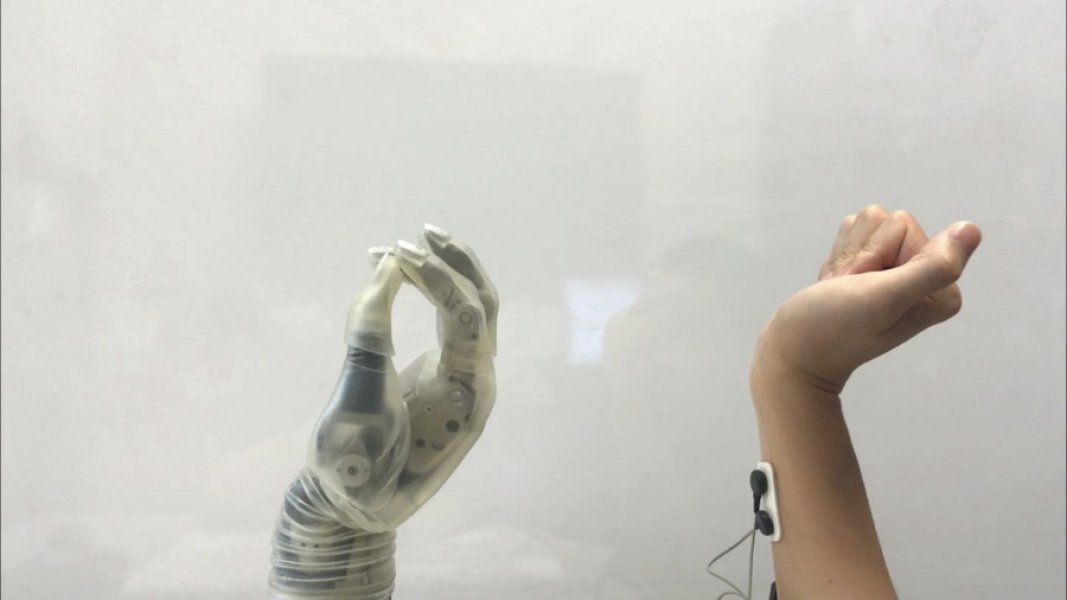 Эта технология была применена для управления протезом руки у человека с ампутированной конечностью. (iii) Нейроморфные модели нервно-мышечной системы: можно восстановить нервно-мышечный рефлекторный процесс для протезов рук с кабельным приводом с человеческими чертами, используя нейроморфное оборудование для быстрого вычисления физиологических параметров. реалистичные модели и эмулировать человекоподобный рефлекс в реальном времени [6]. В настоящее время эта технология находится на стадии оценки для применения человеком. (iv) Неинвазивная тактильная сенсорная обратная связь: мы продемонстрировали возможность использования электрически вызванных тактильных ощущений (ETS) в качестве естественного способа передачи сенсорной информации в мозг человека с ампутированными конечностями. Этот метод сенсорной обратной связи является неинвазивным, обладает долговременной стабильностью и может снабжать людей с ампутированными конечностями множественными модальностями естественной сенсорной информации, специфичной для пальцев [5, 20].
Эта технология была применена для управления протезом руки у человека с ампутированной конечностью. (iii) Нейроморфные модели нервно-мышечной системы: можно восстановить нервно-мышечный рефлекторный процесс для протезов рук с кабельным приводом с человеческими чертами, используя нейроморфное оборудование для быстрого вычисления физиологических параметров. реалистичные модели и эмулировать человекоподобный рефлекс в реальном времени [6]. В настоящее время эта технология находится на стадии оценки для применения человеком. (iv) Неинвазивная тактильная сенсорная обратная связь: мы продемонстрировали возможность использования электрически вызванных тактильных ощущений (ETS) в качестве естественного способа передачи сенсорной информации в мозг человека с ампутированными конечностями. Этот метод сенсорной обратной связи является неинвазивным, обладает долговременной стабильностью и может снабжать людей с ампутированными конечностями множественными модальностями естественной сенсорной информации, специфичной для пальцев [5, 20]. Эта технология в настоящее время проходит оценку функциональных преимуществ у пациентов с ампутированными конечностями. (v) Селективные датчики скольжения, имитирующие окончания Руффини: гибкий тактильный датчик, вдохновленный структурой отпечатков пальцев и функцией окончаний Руффини, с избирательной чувствительностью к статическим силам и силам трения скольжения. может позволить протезу руки справиться со скольжением во время захвата [21]. Доказательство концепции этой технологии завершено. Устройство находится на начальном этапе для применения человеком. (vi) Мягкий протез руки, управляемый сухожилиями: мягкий протез руки, управляемый сухожилиями, с телом пальца, выполненным из континуальной спиральной структуры из сверхэластичного материала из нитинолового сплава, может иметь естественную податливость для захвата предметов. используя простую стратегию управления [22]. Это устройство находится в уточнении структурного дизайна и функциональной оценки.
Эта технология в настоящее время проходит оценку функциональных преимуществ у пациентов с ампутированными конечностями. (v) Селективные датчики скольжения, имитирующие окончания Руффини: гибкий тактильный датчик, вдохновленный структурой отпечатков пальцев и функцией окончаний Руффини, с избирательной чувствительностью к статическим силам и силам трения скольжения. может позволить протезу руки справиться со скольжением во время захвата [21]. Доказательство концепции этой технологии завершено. Устройство находится на начальном этапе для применения человеком. (vi) Мягкий протез руки, управляемый сухожилиями: мягкий протез руки, управляемый сухожилиями, с телом пальца, выполненным из континуальной спиральной структуры из сверхэластичного материала из нитинолового сплава, может иметь естественную податливость для захвата предметов. используя простую стратегию управления [22]. Это устройство находится в уточнении структурного дизайна и функциональной оценки.
4. Заключение и перспектива
Разработка протеза руки с биореалистичными элементами сенсомоторной системы человека может повысить ее нейронную совместимость [16]. Несовместимый протез руки может привести к снижению функциональности или отторжению. Прошлые исследования накопили большой объем знаний о сенсомоторной системе человека [9, 23–26]. В настоящее время технологически зрело использование этого комплекса знаний для разработки биореалистичных протезов рук, которые восстанавливают нервно-мышечную механику [6], спинномозговые рефлексы [13] и тактильную обратную связь [3–5, 7]. Это может привести не только к превосходной производительности, но и к новому поколению протезов рук. Понимание нейронной совместимости между протезом руки и сенсомоторной системой человека может в значительной степени повлиять на дизайн протезов и терапевтических устройств [16]. Биореалистический подход также должен способствовать обратному инжинирингу для понимания нейронных механизмов управления движениями мозга у людей [27].
Несовместимый протез руки может привести к снижению функциональности или отторжению. Прошлые исследования накопили большой объем знаний о сенсомоторной системе человека [9, 23–26]. В настоящее время технологически зрело использование этого комплекса знаний для разработки биореалистичных протезов рук, которые восстанавливают нервно-мышечную механику [6], спинномозговые рефлексы [13] и тактильную обратную связь [3–5, 7]. Это может привести не только к превосходной производительности, но и к новому поколению протезов рук. Понимание нейронной совместимости между протезом руки и сенсомоторной системой человека может в значительной степени повлиять на дизайн протезов и терапевтических устройств [16]. Биореалистический подход также должен способствовать обратному инжинирингу для понимания нейронных механизмов управления движениями мозга у людей [27].
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в связи с публикацией этой статьи.
Вклад авторов
Все авторы внесли свой вклад в окончательный вариант рукописи. Н. Лан предложил, подготовил и отредактировал рукопись; М. Хао помогал редактировать рукопись; М. Хао, К. М. Ню, Х. Цуй, Ю. Ван, Т. Чжан и П. Фанг написали по части в «Биореалистическом подходе с новыми технологиями»; и С. Чоу подготовили фигуру.
Н. Лан предложил, подготовил и отредактировал рукопись; М. Хао помогал редактировать рукопись; М. Хао, К. М. Ню, Х. Цуй, Ю. Ван, Т. Чжан и П. Фанг написали по части в «Биореалистическом подходе с новыми технологиями»; и С. Чоу подготовили фигуру.
Благодарности
Эта работа была частично поддержана грантом Национальной ключевой программы исследований и разработок Китая (№ 2017YFA0701100), ключевым грантом Фонда естественных наук Китая (№ 81630050) и грантом Института медицинской робототехники Шанхайского университета Цзяо Тонг (№ IMR2018KY01). Авторы хотели бы поблагодарить других участников исследовательского проекта, в частности, доктора Вэньюань Лян, доктора Ти Ли, доктора Тифенг Ли и доктора Шэн Би за их вклад в продвижение этого подхода.
Ссылки
- E. Biddiss и T. Chau, «Протезирование верхних конечностей», American Journal of Physical Medicine & Rehabilitation , vol. 86, нет. 12, стр. 977–987, 2007 г. Посмотреть на: Сайт издателя | Google Scholar
- Д.
 С. Чайлдресс, «Управление с обратной связью в протезных системах: историческая перспектива», Annals of Biomedical Engineering , vol. 8, нет. 4–6, стр. 293–303, 1980. Посмотреть на: Сайт издателя | Google Scholar
С. Чайлдресс, «Управление с обратной связью в протезных системах: историческая перспектива», Annals of Biomedical Engineering , vol. 8, нет. 4–6, стр. 293–303, 1980. Посмотреть на: Сайт издателя | Google Scholar - Д. В. Тан, М. А. Шифер, М. В. Кейт, Дж. Р. Андерсон, Дж. Тайлер и Д. Дж. Тайлер, «Нейронный интерфейс обеспечивает долгосрочное стабильное естественное сенсорное восприятие», Наука Трансляционная медицина , том. 6, нет. 257, статья 257ра138, 2014. Посмотреть на: Сайт Издателя | Google Scholar
- E. D’Anna, G. Valle, A. Mazzoni et al., «Протез руки с замкнутым контуром с одновременной внутринейронной тактильной и позиционной обратной связью», Science Robotics , vol. 4, нет. 27, статья eaau8892, 2019 г. Посмотреть на сайте издателя | Google Scholar
- M. Hao, C. H. Chou, J. Zhang et al., «Восстановление специфической сенсорной обратной связи пальцев для трансрадиальных ампутантов с помощью неинвазивных вызванных тактильных ощущений», IEEE Open Journal of Engineering in Medicine and Biology , vol. 1, стр. 98–107, 2020 г. Посмотреть на: Сайт издателя | Google Scholar
- C. M. Niu, Q. Luo, C. Chou, J. Liu, M. Hao, and N. Lan, «Нейроморфная модель рефлекса для управления протезом руки в реальном времени, как у человека», Annals of Biomedical Engineering. , том. 49, нет. 2, стр. 673–688, 2021 г. Посмотреть на: Сайт издателя | Google Scholar
- С. Дж. Бенсмайя, Д. Дж. Тайлер и С. Микера, «Восстановление сенсорной информации с помощью бионических рук», Nature Biomedical Engineering , стр. 1–13, 2020 г. Посмотреть на: Сайт издателя | Google Scholar
- E. Bizzi, VCK Cheung, A. d’Avella, P. Saltiel и M. Tresch, «Объединение модулей для движения», Brain Research Reviews , vol. 57, нет. 1, стр. 125–133, 2008 г. Посмотреть на: Сайт издателя | Google Scholar
- Б. Альстермарк и Т. Иса, «Схемы для умелого достижения и захвата», Annual Review of Neuroscience , vol. 35, нет. 1, стр. 559–578, 2012 г. Посмотреть на: Сайт издателя | Академия Google
- М. Хао, Х. Хе, К. Сяо, Б. Альстермарк и Н. Лан, «Корково-мышечная передача сигналов тремора проприоспинальными нейронами при болезни Паркинсона», PLoS One , vol. 8, нет. 11, статья e79829, 2013 г. Посмотреть на: Сайт издателя | Google Scholar
- Х. Халтборн, «Спинальные рефлексы, механизмы и концепции: от Эклза до Лундберга и далее», Progress in Neurobiology , vol. 78, нет. 3–5, стр. 215–232, 2006 г. Посмотреть на: Сайт издателя | Google Scholar
- А. Прохазка, «Проприоцептивная обратная связь и регуляция движений», в Справочник по физиологии, упражнения: регуляция и интеграция множественных систем , стр. 89–127, Американское физиологическое общество, 1996, разд. 12, глава 3. См.: Google Scholar
- S. Li, C. Zhuang, M. Hao et al., «Координированный альфа- и гамма-контроль мышц и веретен в движении и позе», Frontiers in Computational Neuroscience , об. 9, с. 122, 2015 г. Посмотреть на сайте издателя | Google Scholar
- Ю. Шань, Х. Фэн и З. Ли, «Электрическая стимуляция при травмах нервной системы: ход исследований и перспективы», Acta Physico-Chimica Sinica , vol. 36, нет. 12, с. 2005038, 2020. Посмотреть на: Сайт издателя | Google Scholar
- Z. Li, Q. Zheng, Z. L. Wang и Z. Li, «Датчики с автономным питанием на основе наногенераторов для носимой и имплантируемой электроники», Research , vol. 2020 г., статья 8710686, 25 страниц, 2020 г. Посмотреть на: Сайт издателя | Google Scholar
- Н. Лан, К. М. Ниу, М. Хао, К. Чоу и К. Дай, «Достижение нейронной совместимости с сенсомоторным контролем человека в протезных и терапевтических устройствах», IEEE Transactions on Medical Robotics and Bionics , vol. 1, нет. 3, стр. 122–134, 2019 г. Посмотреть на: Сайт издателя | Google Scholar
- H. Cui, «Прямой прогноз в задней теменной коре и динамическом интерфейсе мозг-машина», Frontiers in Integrative Neuroscience , vol. 10, 2016. Посмотреть на: Сайт издателя | Google Scholar
- C. Li, Y. Zhang, T. Wang et al., «Генеративное декодирование внутрикортикальных нейронных сигналов для онлайн-управления манипулятором для перехвата движущихся объектов», Журнал серии конференций по физике , том. 1576, статья 012057, 2020 г. Посмотреть на: Сайт издателя | Google Scholar
- X. Li, O. W. Samuel, X. Zhang, H. Wang, P. Fang и G. Li, «Стратегия классификации движений на основе комбинации сигналов сЭМГ-ЭЭГ для пациентов с ампутированными конечностями», Journal нейроинженерии и реабилитации , вып. 14, нет. 1, с. 2, 2017. Посмотреть на: Сайт издателя | Google Scholar
- Ю. Ли, К. Чоу, Дж. Чжан, М. Хао и Н. Лан, «Пилотное исследование одновременной стимуляции нескольких участков для тактильной и открывающей информационной обратной связи в протезной руке», в представлен на 10-й Международной конференции IEEE/EMBS по нейронной инженерии (NER) 2021 г., май 2021 г., виртуальный. https://neuro.embs.org/2021/. См.: Google Scholar
- Y. Li, Z. Cao, T. Li et al., «Высокоселективный биомиметический гибкий тактильный датчик для нейропротезирования», Research , vol. 2020, статья 8910692, ст. 1, 2020. Посмотреть на: Сайт издателя | Google Scholar
- Y. Yan, Y. Wang, X. Chen, C. Shi, J. Yu и C. Cheng, «Управляемый сухожилиями протез руки с континуальной структурой», в 2020 42-я ежегодная международная конференция IEEE Engineering in Medicine Biology Society (EMBC) , стр. 4951–4954, Монреаль, Квебек, Канада, 2020 г. Посмотреть на: Сайт издателя | Google Scholar
- Л. Джами, «Сухожильные органы Гольджи в скелетных мышцах млекопитающих: функциональные свойства и центральные действия», Physiological Reviews , vol. 72, нет. 3, стр. 623–666, 1992. Посмотреть на: Сайт издателя | Google Scholar
- F. Zajac, «Мышцы и сухожилия: свойства, модели, масштабирование и применение в биомеханике и управлении двигателем», Критические обзоры биомедицинской инженерии , том. 17, нет. 4, стр. 359–411, 1989. Просмотр в: Google Scholar
- В. Г. Мейсфилд и Т. П. Кнеллвольф, «Функциональные свойства мышечных веретен человека», Journal of Neurophysiology , vol. 120, нет. 2, стр. 452–467, 2018 г. Посмотреть на: Сайт издателя | Google Scholar
- Р. С. Йоханссон и Дж. Р. Фланаган, «Кодирование и использование тактильных сигналов от кончиков пальцев в задачах манипулирования объектами», Nature Reviews. Неврология , том. 10, нет. 5, стр. 345–359, 2009 г. Посмотреть на: Сайт издателя | Google Scholar
- Ченг Г., Эрлих С. К., Лебедев М. и Николелис М. А. Л., «Нейроинженерные проблемы слияния робототехники и нейронауки», Science Robotics , vol. 5, нет. 49, 2020. Посмотреть на: Сайт издателя | Google Scholar
 С. Чайлдресс, «Управление с обратной связью в протезных системах: историческая перспектива», Annals of Biomedical Engineering , vol. 8, нет. 4–6, стр. 293–303, 1980. Посмотреть на: Сайт издателя | Google Scholar
С. Чайлдресс, «Управление с обратной связью в протезных системах: историческая перспектива», Annals of Biomedical Engineering , vol. 8, нет. 4–6, стр. 293–303, 1980. Посмотреть на: Сайт издателя | Google Scholar 1, стр. 98–107, 2020 г. Посмотреть на: Сайт издателя | Google Scholar
1, стр. 98–107, 2020 г. Посмотреть на: Сайт издателя | Google Scholar Хао, Х. Хе, К. Сяо, Б. Альстермарк и Н. Лан, «Корково-мышечная передача сигналов тремора проприоспинальными нейронами при болезни Паркинсона», PLoS One , vol. 8, нет. 11, статья e79829, 2013 г. Посмотреть на: Сайт издателя | Google Scholar
Хао, Х. Хе, К. Сяо, Б. Альстермарк и Н. Лан, «Корково-мышечная передача сигналов тремора проприоспинальными нейронами при болезни Паркинсона», PLoS One , vol. 8, нет. 11, статья e79829, 2013 г. Посмотреть на: Сайт издателя | Google Scholar Фэн и З. Ли, «Электрическая стимуляция при травмах нервной системы: ход исследований и перспективы», Acta Physico-Chimica Sinica , vol. 36, нет. 12, с. 2005038, 2020. Посмотреть на: Сайт издателя | Google Scholar
Фэн и З. Ли, «Электрическая стимуляция при травмах нервной системы: ход исследований и перспективы», Acta Physico-Chimica Sinica , vol. 36, нет. 12, с. 2005038, 2020. Посмотреть на: Сайт издателя | Google Scholar Li, Y. Zhang, T. Wang et al., «Генеративное декодирование внутрикортикальных нейронных сигналов для онлайн-управления манипулятором для перехвата движущихся объектов», Журнал серии конференций по физике , том. 1576, статья 012057, 2020 г. Посмотреть на: Сайт издателя | Google Scholar
Li, Y. Zhang, T. Wang et al., «Генеративное декодирование внутрикортикальных нейронных сигналов для онлайн-управления манипулятором для перехвата движущихся объектов», Журнал серии конференций по физике , том. 1576, статья 012057, 2020 г. Посмотреть на: Сайт издателя | Google Scholar Cao, T. Li et al., «Высокоселективный биомиметический гибкий тактильный датчик для нейропротезирования», Research , vol. 2020, статья 8910692, ст. 1, 2020. Посмотреть на: Сайт издателя | Google Scholar
Cao, T. Li et al., «Высокоселективный биомиметический гибкий тактильный датчик для нейропротезирования», Research , vol. 2020, статья 8910692, ст. 1, 2020. Посмотреть на: Сайт издателя | Google Scholar Просмотр в: Google Scholar
Просмотр в: Google ScholarCopyright
Copyright © 2021 Ning Lan et al. Издательство «Обзор науки и техники» с эксклюзивной лицензией. Распространяется по лицензии Creative Commons Attribution License (CC BY 4.0).
Протез руки нового поколения: от биомиметики к биореалистичности
Сохранить цитату в файл
Формат:
Резюме (текст) PubMedPMIDAbstract (текст) CSV
Добавить в коллекции
- Создать новую коллекцию
- Добавить в существующую коллекцию
Назовите свою коллекцию:
Имя должно содержать менее 100 символов
Выберите коллекцию:
Невозможно загрузить вашу коллекцию из-за ошибки
Повторите попытку
Добавить в мою библиографию
- Моя библиография
Не удалось загрузить делегатов из-за ошибки
Повторите попытку
Ваш сохраненный поиск
Название сохраненного поиска:
Условия поиска:
Тестовые условия поиска
Эл. адрес:
адрес:
(изменить)
Который день?
Первое воскресеньеПервый понедельникПервый вторникПервая средаПервый четвергПервая пятницаПервая субботаПервый деньПервый рабочий день
Который день?
ВоскресеньеПонедельникВторникСредаЧетвергПятницаСуббота
Формат отчета:
SummarySummary (text)AbstractAbstract (text)PubMed
Отправить максимум:
1 шт. 5 шт. 10 шт. 20 шт. 50 шт. 100 шт. 200 шт.
Отправить, даже если нет новых результатов
Необязательный текст в электронном письме:
Создайте файл для внешнего программного обеспечения для управления цитированием
Полнотекстовые ссылки
Бесплатная статья ЧВК
Полнотекстовые ссылки
. 2021 24 марта; 2021:4675326.
2021 24 марта; 2021:4675326.
дои: 10.34133/2021/4675326.
Электронная коллекция 2021.
Нин Лан
1
2
, Манчжао Хао
1
2
, Чуаньсинь М Ню
1
2
3
, Хэ Цуй
4
, Ю Ван
5
6
, Тин Чжан
7
, Пэн Фан
8
, Чжи-Хонг Чжоу
1
2
Принадлежности
Принадлежности
- 1 Институт медицинской робототехники Шанхайского университета Цзяо Тонг, Шанхай, Китай.
- 2 Лаборатория инженерной нейрореабилитации, Школа биомедицинской инженерии, Шанхайский университет Цзяо Тонг, Шанхай, Китай.
- 3 Отделение реабилитационной медицины, больница Жуйцзинь, медицинский факультет Шанхайского университета Цзяо Тонг, Шанхай, Китай.
- 4 Центр передового опыта в области изучения мозга и интеллектуальных технологий Китайской академии наук, Шанхай, Китай.
- 5 Школа биологических наук и медицинской инженерии, Бейханский университет, Пекин, Китай.
- 6 Пекинский передовой инновационный центр биомедицинской инженерии, Школа биологических наук и медицинской инженерии, Бейханский университет, Пекин, Китай.
- 7 i-lab, Ключевая лаборатория многофункциональных наноматериалов и интеллектуальных систем, Сучжоуский институт нанотехнологий и нанобионики Китайской академии наук, Сучжоу, Китай.
- 8 Шэньчжэньский институт передовых технологий Китайской академии наук, Шэньчжэнь, Китай.

PMID:
34104890
PMCID:
PMC8152677
DOI:
10.34133/2021/4675326
Бесплатная статья ЧВК
Нин Лан и др.
Исследования (Ваш округ Колумбия).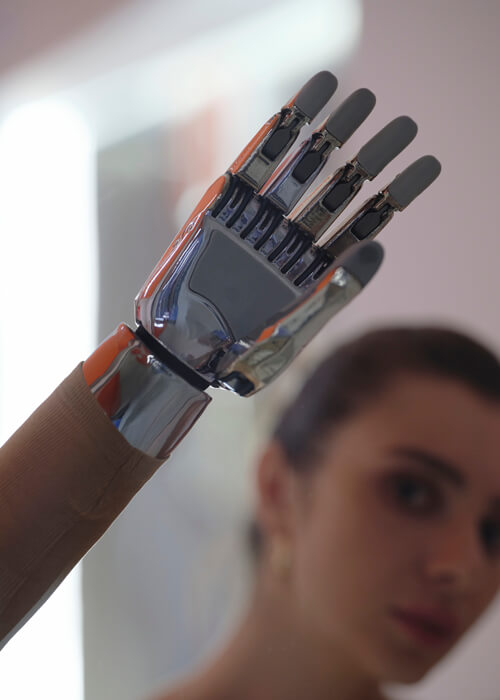
.
Бесплатная статья ЧВК
. 2021 24 марта; 2021:4675326.
дои: 10.34133/2021/4675326.
Электронная коллекция 2021.
Авторы
Нин Лан
1
2
, Манчжао Хао
1
2
, Чуаньсин М Ню
1
2
3
, Хэ Цуй
4
, Ю Ван
5
6
, Тин Чжан
7
, Пэн Фан
8
, Чжи-Хонг Чжоу
1
2
Принадлежности
- 1 Институт медицинской робототехники Шанхайского университета Цзяо Тонг, Шанхай, Китай.
- 2 Лаборатория инженерной нейрореабилитации, Школа биомедицинской инженерии, Шанхайский университет Цзяо Тонг, Шанхай, Китай.
- 3 Отделение реабилитационной медицины, больница Жуйцзинь, медицинский факультет Шанхайского университета Цзяо Тонг, Шанхай, Китай.
- 4 Центр передового опыта в области изучения мозга и интеллектуальных технологий Китайской академии наук, Шанхай, Китай.
- 5 Школа биологических наук и медицинской инженерии, Бейханский университет, Пекин, Китай.
- 6 Пекинский передовой инновационный центр биомедицинской инженерии, Школа биологических наук и медицинской инженерии, Бейханский университет, Пекин, Китай.
- 7 i-lab, Ключевая лаборатория многофункциональных наноматериалов и интеллектуальных систем, Сучжоуский институт нанотехнологий и нанобионики Китайской академии наук, Сучжоу, Китай.
- 8 Шэньчжэньский институт передовых технологий Китайской академии наук, Шэньчжэнь, Китай.


PMID:
34104890
PMCID:
PMC8152677
DOI:
10.34133/2021/4675326
Абстрактный
Интеграция протеза руки с бесшовной нейронной совместимостью для людей с ампутированными конечностями представляет собой сложную задачу для нейробиологов и нейронных инженеров уже более полувека.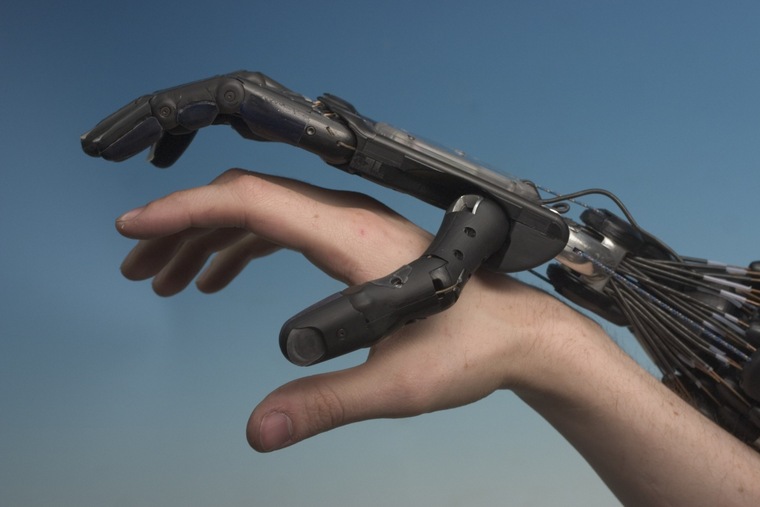 Имитация анатомической структуры или внешнего вида человеческой руки не приводит к улучшению нейронной связи с сенсомоторной системой людей с ампутированными конечностями. Функции современных протезов рук не соответствуют ловкости руки человека, в первую очередь из-за отсутствия сенсорной осведомленности и податливого срабатывания. В последнее время прогресс в восстановлении сенсорной обратной связи стал значительным шагом вперед в улучшении нейронной непрерывности сенсорной информации от протезов рук до людей с ампутированными конечностями. Тем не менее, было предпринято мало усилий, чтобы воспроизвести свойство податливости биологических мышц при приведении в действие протезов рук. Более того, полноценный биореалистичный подход к проектированию протезов рук не рассматривался в исследованиях нейропротезов. В этой перспективной статье мы продвигаем новый взгляд на то, что протез руки может гармонично интегрироваться с людьми с ампутированными конечностями только в том случае, если будет достигнута нейронная совместимость с сенсомоторной системой.
Имитация анатомической структуры или внешнего вида человеческой руки не приводит к улучшению нейронной связи с сенсомоторной системой людей с ампутированными конечностями. Функции современных протезов рук не соответствуют ловкости руки человека, в первую очередь из-за отсутствия сенсорной осведомленности и податливого срабатывания. В последнее время прогресс в восстановлении сенсорной обратной связи стал значительным шагом вперед в улучшении нейронной непрерывности сенсорной информации от протезов рук до людей с ампутированными конечностями. Тем не менее, было предпринято мало усилий, чтобы воспроизвести свойство податливости биологических мышц при приведении в действие протезов рук. Более того, полноценный биореалистичный подход к проектированию протезов рук не рассматривался в исследованиях нейропротезов. В этой перспективной статье мы продвигаем новый взгляд на то, что протез руки может гармонично интегрироваться с людьми с ампутированными конечностями только в том случае, если будет достигнута нейронная совместимость с сенсомоторной системой. Наши текущие исследования подтверждают, что протез руки следующего поколения должен включать в себя биологически реалистичные исполнительные, сенсорные и рефлекторные функции, чтобы полностью достичь нейронной совместимости.
Наши текущие исследования подтверждают, что протез руки следующего поколения должен включать в себя биологически реалистичные исполнительные, сенсорные и рефлекторные функции, чтобы полностью достичь нейронной совместимости.
Copyright © 2021 Нин Лан и др.
Заявление о конфликте интересов
Авторы заявляют об отсутствии конфликта интересов в отношении публикации данной статьи.
Цифры
Рисунок 1
Иллюстрация нейронного управления…
Рисунок 1
Иллюстрация нейронного контроля руки человека (а) и биомиметического контроля…
фигура 1
Иллюстрация нейронного контроля руки человека (а) и биомиметического контроля протеза руки (б). Перед ампутацией мозг контролирует человеческую руку через интактную нервно-мышечную рефлекторную систему вместе с проприоцептивными и кожными сенсорными афферентами. При протезном контроле нервно-мышечный рефлекторный процесс нарушается, и предоставляемая сенсорная информация обратной связи может быть ограниченной и несовместимой с тем, что знакомо мозгу. Таким образом, необходимо восстановить нервно-мышечный рефлекторный процесс и естественную сенсорную обратную связь для протеза руки. Визуальная информация определяет положение и раскрытие рук. Сокращения: HD-EMG: ЭМГ высокой плотности; ETS: вызванное тактильное ощущение. Часть (а) изменена с рисунка 2 в [10] с разрешения.
Перед ампутацией мозг контролирует человеческую руку через интактную нервно-мышечную рефлекторную систему вместе с проприоцептивными и кожными сенсорными афферентами. При протезном контроле нервно-мышечный рефлекторный процесс нарушается, и предоставляемая сенсорная информация обратной связи может быть ограниченной и несовместимой с тем, что знакомо мозгу. Таким образом, необходимо восстановить нервно-мышечный рефлекторный процесс и естественную сенсорную обратную связь для протеза руки. Визуальная информация определяет положение и раскрытие рук. Сокращения: HD-EMG: ЭМГ высокой плотности; ETS: вызванное тактильное ощущение. Часть (а) изменена с рисунка 2 в [10] с разрешения.
См. это изображение и информацию об авторских правах в PMC
Похожие статьи
Биореалистичное управление протезом руки увеличивает функциональные возможности людей с ампутацией.
Луо К., Ню К.М., Чжоу Ч., Лян В., Дэн С., Хао М., Лан Н.
Луо Кью и др.
Фронтальные нейроски. 2021 14 декабря; 15:783505. doi: 10.3389/fnins.2021.783505. Электронная коллекция 2021.
Фронтальные нейроски. 2021.PMID: 34970115
Бесплатная статья ЧВК.Проектирование контроллеров обратной связи для систем человек-протез с использованием согласования моделей H ∞ .
Костакурта Дж., Осборн Л., Такор Н., Сарма С.
Костакурта Дж. и др.
Annu Int Conf IEEE Eng Med Biol Soc. 2018 июль; 2018: 2316-2319. doi: 10.1109/EMBC.2018.8512797.
Annu Int Conf IEEE Eng Med Biol Soc. 2018.PMID: 30440870
Нейроморфная модель рефлекса для человекоподобного управления протезом руки в реальном времени.
Ню С.
М., Луо К., Чоу Ч., Лю Дж., Хао М., Лан Н.
Ню С.М. и соавт.
Энн Биомед Инж. 2021 фев; 49 (2): 673-688. doi: 10.1007/s10439-020-02596-9. Epub 2020 20 августа.
Энн Биомед Инж. 2021.PMID: 32816166
Бесплатная статья ЧВК.Оценка основанного на модели биомиметического контроля силы протезного пальца для захвата.
Луо К., Ню К.М., Лю Дж., Чжоу Ч., Хао М., Лан Н.
Луо Кью и др.
IEEE Trans Neural Syst Rehabil Eng. 2021;29:1723-1733. doi: 10.1109/ТНСРЕ.2021.3106304. Epub 2021 1 сентября.
IEEE Trans Neural Syst Rehabil Eng. 2021.PMID: 34415835
Восприятие иллюзорного движения улучшает двигательный контроль протезов рук.
Marasco PD, Hebert JS, Sensinger JW, Shell CE, Schofield JS, Thumser ZC, Nataraj R, Beckler DT, Dawson MR, Blustein DH, Gill S, Mensh BD, Granja-Vazquez R, Newcomb MD, Carey JP, Orzell БМ.
Мараско П.Д. и соавт.
Sci Transl Med. 2018 14 марта; 10 (432): eaao6990. doi: 10.1126/scitranslmed.aao6990.
Sci Transl Med. 2018.PMID: 29540617
Бесплатная статья ЧВК.
 М., Луо К., Чоу Ч., Лю Дж., Хао М., Лан Н.
М., Луо К., Чоу Ч., Лю Дж., Хао М., Лан Н.
Посмотреть все похожие статьи
Цитируется
От параметрического представления к динамической системе: изменение взглядов на моторную кору при управлении двигателем.
Ван Т, Чен Ю, Цуй Х.
Ван Т и др.
Нейроски Бык. 2022 июль;38(7):796-808. doi: 10.1007/s12264-022-00832-x. Epub 2022 17 марта.
Нейроски Бык. 2022.PMID: 35298779
Бесплатная статья ЧВК.Обзор.
Биореалистичное управление протезом руки увеличивает функциональные возможности людей с ампутацией.
Луо К., Ню К.
М., Чжоу Ч., Лян В., Дэн С., Хао М., Лан Н.
Луо Кью и др.
Фронтальные нейроски. 2021 14 декабря; 15:783505. doi: 10.3389/fnins.2021.783505. Электронная коллекция 2021.
Фронтальные нейроски. 2021.PMID: 34970115
Бесплатная статья ЧВК.Проводящий пористый MXene для бионических, носимых и точных датчиков движения жестов.
Дуань С., Линь И., Ван З., Тан Дж., Ли И., Чжу Д., У Дж., Тао Л., Чой Ч., Сунь Л., Ся Дж., Вэй Л., Ван Б.
Дуан С. и др.
Исследования (Ваш округ Колумбия). 2021 9 июня; 2021:9861467. дои: 10.34133/2021/9861467. Электронная коллекция 2021.
Исследования (Ваш округ Колумбия). 2021.PMID: 34223178
Бесплатная статья ЧВК.
 М., Чжоу Ч., Лян В., Дэн С., Хао М., Лан Н.
М., Чжоу Ч., Лян В., Дэн С., Хао М., Лан Н. использованная литература
Biddiss E., Chau T. Протезирование верхних конечностей.
Американский журнал физической медицины и реабилитации. 2007;86(12):977–987. doi: 10.1097/PHM.0b013e3181587f6c.—
DOI
—
пабмед
Чайлдресс Д. С. Замкнутый контур управления в протезных системах: историческая перспектива. Анналы биомедицинской инженерии. 1980;8(4-6):293–303. дои: 10.1007/BF02363433.
—
DOI
—
пабмед
Тан Д.
В., Шифер М. А., Кит М. В., Андерсон Дж. Р., Тайлер Дж., Тайлер Д. Дж. Нейронный интерфейс обеспечивает долгосрочное стабильное естественное сенсорное восприятие. Научная трансляционная медицина. 2014;6(257, ст. 257ра138) doi: 10.1126/scitranslmed.3008669.—
DOI
—
ЧВК
—
пабмед
Д’Анна Э., Валле Г., Маццони А. и др. Замкнутый протез руки с одновременной внутринейронной тактильной и позиционной обратной связью. Научная робототехника.
 Американский журнал физической медицины и реабилитации. 2007;86(12):977–987. doi: 10.1097/PHM.0b013e3181587f6c.
Американский журнал физической медицины и реабилитации. 2007;86(12):977–987. doi: 10.1097/PHM.0b013e3181587f6c. В., Шифер М. А., Кит М. В., Андерсон Дж. Р., Тайлер Дж., Тайлер Д. Дж. Нейронный интерфейс обеспечивает долгосрочное стабильное естественное сенсорное восприятие. Научная трансляционная медицина. 2014;6(257, ст. 257ра138) doi: 10.1126/scitranslmed.3008669.
В., Шифер М. А., Кит М. В., Андерсон Дж. Р., Тайлер Дж., Тайлер Д. Дж. Нейронный интерфейс обеспечивает долгосрочное стабильное естественное сенсорное восприятие. Научная трансляционная медицина. 2014;6(257, ст. 257ра138) doi: 10.1126/scitranslmed.3008669.