Содержание
Основные характеристики бионического протеза ИНДИ
Бионическая рука с подвижностью каждого пальца и настраиваемыми жестами.
| Консультация по льготному протезированию |
Твой манифест
Настраивайте жесты руки под себя и используйте стандартные схваты под различные предметы и действия. Управление протезом происходит с помощью поверхностных ЭМГ-датчиков, а схват кистью выполняется пятью небольшими мощными электродвигателями.
Пользователи бионики Манифесто
Заполнить анкету на бесплатное протезирование
Характеристики бионической руки Манифесто
Конструкция
Протез состоит из кисти с пятью электромеханическими приводами, гильзы предплечья, которая изготавливается по индивидуальному гипсовому слепку, ротационного фланца запястья (опционально), ЭМГ-датчиков, аккумулятора, зарядного устройства, электрокабелей.
Управление
Управление бионической кистью происходит за счет регистрации на поверхности кожи электромиографических сигналов посредством датчиков, зафиксированных во внутренней гильзе, и последующим формированием управляющего сигнала для осуществления схвата.
Сила и скорость
Управление скоростью и силой схвата может осуществляться пропорционально силе напряжения мышц культи, это позволяет брать хрупкие предметы, не боясь сломать их.
Жесты
Настройка и переключение жестов происходит через мобильное приложение, подключенное к протезу на базе Android. Имеется 3 преднастроенных жеста.
Раскрытие кисти до 100 мм.
Пассивная ротация кисти до 180°
До 14 различных видов схвата
Тачскрин напальчник для работы с экранами
Приложение для настройки
Приложение для настройки параметров линейки бионических протезов компании Моторика С помощью приложения можно выбирать режим работы девайса, а также включать дополнительные опции, которые помогают упростить работу с биоэлектрическим протезом кисти в повседневной жизни.
В соответствии с Федеральным законом от 24.11.1995 № 181-ФЗ «О социальной защите инвалидов в Российской Федерации»:
Мы изготавливаем бионические руки Манифесто за счёт средств федерального бюджета. Услуга доступна для граждан РФ. Мы помогаем со всеми документами.
Услуга доступна для граждан РФ. Мы помогаем со всеми документами.
| Подать заявку |
Мы изготавливаем бионические руки Манифесто за счёт средств федерального бюджета. Услуга доступна для граждан РФ. Мы помогаем со всеми документами.
| Подать заявку |
Протез, про который рассказывают:
Принцип работы бионической руки
Система управления бионическим протезом работает с помощью электродов, считывающих электрический потенциал с мышц культи в момент их сокращения. Информация с датчиков передается на микропроцессор кисти и через компьютерные алгоритмы преобразуется в двигательные команды. В результате протез выполняет сжатие или разжатие пальцев.
Внешний вид
Каждый протез Моторики — это история, которая легла в основу его создания. С помощью современных технологий мы стремимся подчеркнуть индивидуальность каждого пользователя.
Наш дизайнер воплощает любые идеи моториканцев, будь то прорисовка кибер-мышц или корпус, дополненный необычным орнаментом.
Истории пользователей бионических рук Манифесто
Дополнительные возможности бионики
Функционал современных протезов Моторики постоянно совершенствуется и обновляется. Бионическая рука теперь напоминает современный мини-компьютер. Дополнительные опции обсуждаются отдельно при заказе протеза.
Бесконтактная оплата
Банковский мини-таг, с помощью которого можно в одно касание расплачиваться в магазинах или общественном транспорте. Для оплаты используется технология PayPass.
Мониторинг состояния
GSM-модуль для удаленного мониторинга состояния протеза, выявления неисправностей, обновления прошивки миоэлектрического протеза.
Мы в социальных сетях
Если у вас есть вопросы — мы поможем разобраться
Назначение и сертификация
Протез Манифесто — это медицинское изделие, которое изготавливается по индивидуальным заказам.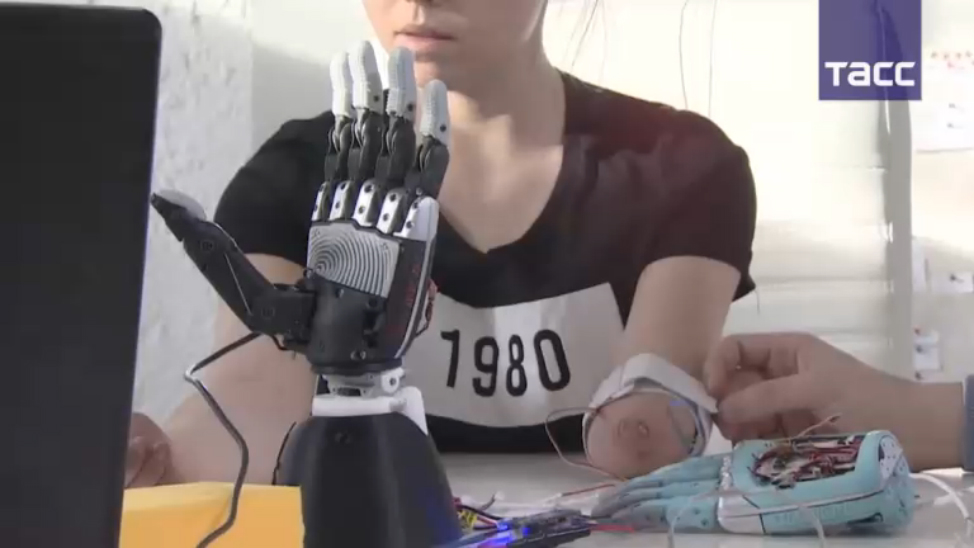 Имеются противопоказания по использованию, необходимо получение консультации специалиста.
Имеются противопоказания по использованию, необходимо получение консультации специалиста.
Изделие имеет сертификацию на территории Евросоюза.
Скачать
Протез разработан при поддержке Фонда содействия инноваций
Особенности протезирования
Бионические протезы Манифесто подходят для детей от 12 лет и взрослых с отсутствием кисти и культей предплечья. Имеются противопоказания по использованию, необходимо получение консультации специалиста.
Заполнить анкету на протезирование
Подростковое протезирование
от 12 до 18 лет
| Подробнее |
Взрослое протезирование
всех возрастов
| Подробнее |
Рука помощи: как устроен бионический протез
Фото: A.R.M. Project Titanium
В следующем году холдинг «Технодинамика» Госкорпорации Ростех начнет серийное производство бионических протезов руки. Разработчики ставят перед собой амбициозную задачу – создать собственный «автомат Калашникова» в сфере бионического протезирования. Кроме того, разработки в этой тематике ведут холдинги «Швабе» и КРЭТ.
Разработчики ставят перед собой амбициозную задачу – создать собственный «автомат Калашникова» в сфере бионического протезирования. Кроме того, разработки в этой тематике ведут холдинги «Швабе» и КРЭТ.
Для людей, лишившихся руки, бионический протез – это возможность почувствовать себя не инвалидом, а супергероем. Как отмечают создатели, такие протезы могут быть адаптированы и для использования на сложных и опасных производствах. Например, при дистанционной работе с огне- и взрывоопасными составами или в агрессивной среде.
О том, какие новые возможности предоставляет современная бионика и как устроен новейший бионический протез – в нашем материале.
Запчасти для человека
О замене утраченных органов человечество задумывалось с древних времен, постепенно совершенствуя эту область знаний и сами протезы. Если первые протезы в основном имели эстетическое предназначение и визуально скрывали ущербность, лишь в редких случаях выполняя функции недостающих органов, то современные устройства в недалеком будущем смогут даже расширить возможности человека, сделав из него кибернетический организм, или киборга.
Несмотря на то что киборгизация человечества все еще выглядит сюжетом из фантастики, киборги уже живут среди нас, ведь так можно назвать любого человека, который использует механический или электронный протез или имплант. Сегодня одним из самых совершенных и при этом доступных видов протезирования верхних конечностей являются бионические протезы.
Бионика – наука, изучающая возможности применения свойств живой природы в технике. Впервые это слово употребил в 1958 году американский военный врач Джек Стил, который исследовал природные процессы и явления, чтобы применить эти знания в разработках для армии США. Одним из результатов развития бионики стало появление электронных протезов, которые могут взаимодействовать с нервными клетками человека.
Примечательно, что в СССР подобные разработки начались еще в 1956 году, когда доктор биологических наук Яков Славуцкий описал физиологические аспекты биоэлектрического управления протезами.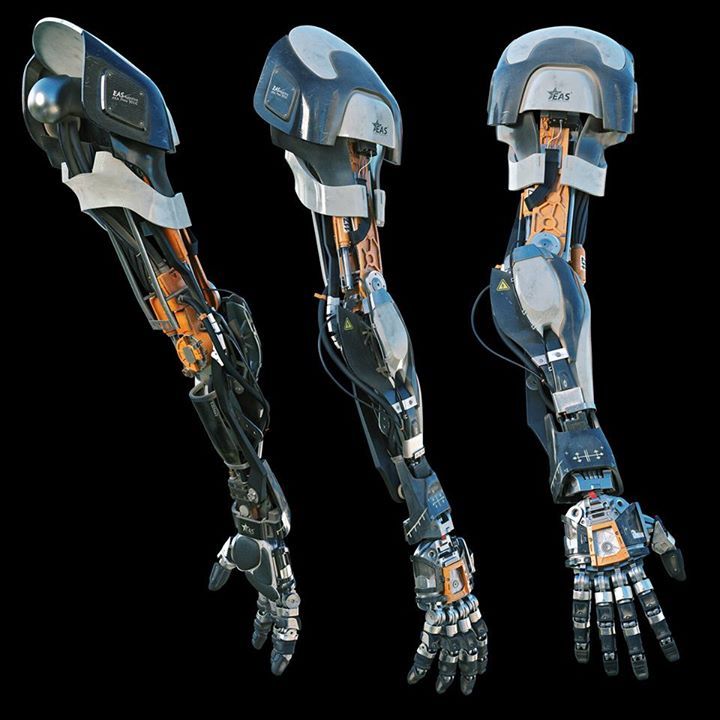 А уже в 1961 году начался промышленный выпуск советских протезов предплечья с биоэлектрическим управлением.
А уже в 1961 году начался промышленный выпуск советских протезов предплечья с биоэлектрическим управлением.
Стать киборгом за счет государства
В России около 200 тысяч человек нуждаются в протезировании рук или ног. Государство декларирует помощь в приобретении протеза, но на практике это часто оказывается проблематичным – либо очень сложно пройти через бюрократические препоны и получить компенсацию стоимости купленного за свои деньги протеза, либо выделяемые бесплатно протезы оказываются устаревших моделей и низкого качества. Еще одна проблема – сами инвалиды мало знают о современных протезах и о своих возможностях в получении технических средств реабилитации.
Но ситуация постепенно выравнивается. В рамках нацпроекта «Здоровье» увеличивается финансирование направления. В России за последние несколько лет появились свои стартапы разработчиков перспективных типов протезов, которые могут конкурировать с западными монополистами, по меньшей мере, на российском рынке. К теме проявляют интерес СМИ, шаг за шагом создается инфополе, у проектов появляются частные и государственные инвесторы, готовые поддержать деньгами и производственными возможностями.
К теме проявляют интерес СМИ, шаг за шагом создается инфополе, у проектов появляются частные и государственные инвесторы, готовые поддержать деньгами и производственными возможностями.
Важным стимулом к развитию функциональных протезов стало развитие технологий. Практически все современные промышленные тренды нашли отражение в протезировании конечностей – роботизация, искусственный интеллект, создание материалов нового поколения, увеличение емкости и снижение веса аккумуляторных устройств, 3D-печать и другие.
Как работает бионическая рука
Бионический или биоэлектрический протез рождается на стыке наук – биологии, медицины, инженерии. Дизайн тоже играет немаловажную роль. Сегодня и производители, и будущие пользователи протезов не ограничивают себя в визуальном копировании природной конечности – протез может выглядеть футуристичной рукой робота или быть раскрашенным яркими принтами.
Работает бионический протез так. На культю руки крепится гильза, которая в каждом случае изготавливается врачом-протезистом под индивидуальные параметры. В гильзе размещаются датчики мышечной активности, взаимодействующие уже непосредственно с роботизированной рукой.
На культю руки крепится гильза, которая в каждом случае изготавливается врачом-протезистом под индивидуальные параметры. В гильзе размещаются датчики мышечной активности, взаимодействующие уже непосредственно с роботизированной рукой.
Фото: «Концерн Радиоэлектронные технологии»
Управление бионической рукой осуществляется через электроды с помощью биоэлектрических потенциалов мышц. Другими словами, протез «улавливает» мышечные импульсы и реагирует на них определенными движениями. Большинство задач решается двумя действиями протеза – хватом и щупом. Первое позволяет взаимодействовать с крупными предметами, второе – с мелкими, например застегнуть молнию или завязать шнурки.
Некоторые производители расширяют возможности бионических протезов, встраивая в них различные датчики и гаджеты, устройства оплаты, фонарики. Уже сегодня понятно, что в обозримом будущем возможности протезов превысят возможности природных органов тела, и это откроет совершенно новые перспективы их применения.
Кибер-руки Ростеха
В России наблюдается постепенный переход от косметического протезирования к функциональному, а рынок бионических протезов с каждым годом растет. По словам экспертов, в данный момент около 50 тыс. россиян стоят в очереди на протезирование рук. Сегодня благодаря участию госсектора молодые ученые и бизнесмены готовы вкладывать свои силы и знания в бионику. Невысокая цена – основное конкурентное преимущество отечественных разработок: базовые модели разрабатываются с учетом полного покрытия стоимости протеза субсидией Фонда социального страхования. Второй плюс для тех, кто выберет российский протез – более оперативная замена или ремонт в случае неполадок.
Перспективным направлением занимается сразу несколько предприятий Ростеха. Например, холдинг «Технодинамика» в следующем году начнет серийное производство бионических протезов руки под маркой A.R.M., выполненных полностью из отечественных компонентов. Протез создан совместно с командой изобретателей из Ленинградской области. Искусственная рука из металла и полиуретана воспроизводит основные движения кисти, не боится пыли и влаги и работает до трех дней без подзарядки. С помощью протеза можно поднимать до 10 кг и захватывать предметы диаметром до 10 см. Производить протезы A.R.M. будет НПП «Краснознаменец».
Искусственная рука из металла и полиуретана воспроизводит основные движения кисти, не боится пыли и влаги и работает до трех дней без подзарядки. С помощью протеза можно поднимать до 10 кг и захватывать предметы диаметром до 10 см. Производить протезы A.R.M. будет НПП «Краснознаменец».
Холдинг «Швабе» уже выпускает высокотехнологичные протезы рук в сотрудничестве с резидентом «Сколково» – компанией «Моторика». Специалисты Вологодского оптико-механического завода собирают механическую часть протеза и внутренний остов кисти. Устройства «Моторики» отличаются чуткой системой управления, позволяющей работать с хрупкими предметами, различным дополнительным функционалом и длительным временем работы. Компания «Моторика» занимается просветительской деятельностью, помогает с получением протезов за счет государства и поддерживает сообщество владельцев бионики.
В рамках холдинга КРЭТ производство бионических протезов осваивает НПО «Квант». Предприятие готовится к выпуску протезов SmartLi, разработанных новгородской компанией «Техбионик». Важное преимущество разработки – модульная конструкция протезов. Она открывает широкие возможности для адаптации устройств под конкретных пациентов и снижает стоимость протеза. Проект предусматривает выпуск целой линейки протезов: от облегченных моделей для маленьких детей до многофункциональных искусственных кистей.
Предприятие готовится к выпуску протезов SmartLi, разработанных новгородской компанией «Техбионик». Важное преимущество разработки – модульная конструкция протезов. Она открывает широкие возможности для адаптации устройств под конкретных пациентов и снижает стоимость протеза. Проект предусматривает выпуск целой линейки протезов: от облегченных моделей для маленьких детей до многофункциональных искусственных кистей.
все о современном протезировании, фото, цены на новейшие протезы рук и ног выше колена
Содержание:
Протезирование – активно развивающаяся отрасль, которая позволяет людям с ограниченными физическими возможностями вернуться к полноценной жизни.
По статистике, в мире ежеминутно проводятся операции по ампутации конечностей. Современные протезы ног выше колена, ниже колена, выполняют не только скрывают дефект, они позволяют человеку ходить, бегать, танцевать, вести полноценный, активный образ жизни.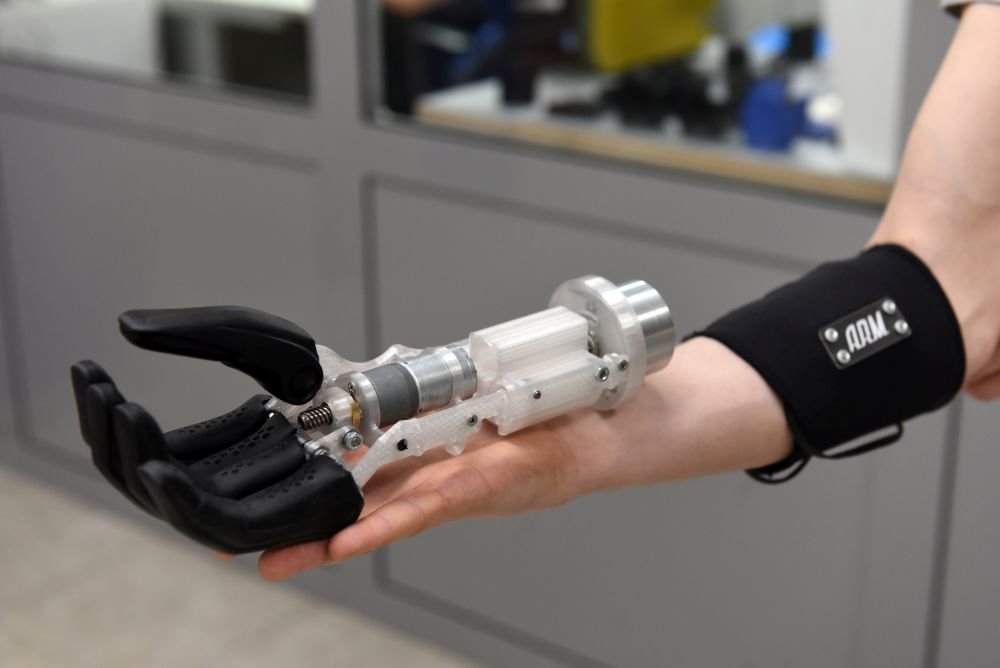 Если посмотреть фото новых конструкций последнего поколения, то станет понятным, насколько они стильные, функциональные. Цена их тоже немалая, но купить такие модели можно по сниженной стоимости, участвуя в социальных программах. Прошли те времена, когда подобные элементы выполняли только функцию маскировки увечья, заменяли руки или ноги, но лишь незначительно облегчали жизнь пациентам. Роботизированные модели позволяют вернуть трудоспособность, избежать глубокой инвалидизации. Современные протезы рук выпускаются во всем мире. В нашей стране тоже работают крупные производители, которые создают медицинское вспомогательное оборудование, которое по качеству и функциональным характеристикам не хуже зарубежных аналогов. По фото таких приспособлений можно оценить всю их мощь и возможности.
Если посмотреть фото новых конструкций последнего поколения, то станет понятным, насколько они стильные, функциональные. Цена их тоже немалая, но купить такие модели можно по сниженной стоимости, участвуя в социальных программах. Прошли те времена, когда подобные элементы выполняли только функцию маскировки увечья, заменяли руки или ноги, но лишь незначительно облегчали жизнь пациентам. Роботизированные модели позволяют вернуть трудоспособность, избежать глубокой инвалидизации. Современные протезы рук выпускаются во всем мире. В нашей стране тоже работают крупные производители, которые создают медицинское вспомогательное оборудование, которое по качеству и функциональным характеристикам не хуже зарубежных аналогов. По фото таких приспособлений можно оценить всю их мощь и возможности.
История протезирования
Существует немало видов новых современных протезов:
- зубные;
- эндопротезы – заменяют разрушенные тазобедренные, коленные суставы;
- глазные;
- протезы конечностей;
- протезы на вычленение, заменяющие и важные суставы, и конечности полностью;
- протезы отдельных частей тела – пальцев, носа, уха.


Когда мы говорим о древних протезах, то представляем себе старинного пирата с деревянной подпоркой вместо ноги и металлическим крюком вместо руки. Но история протезирования зародилась значительно раньше. Как свидетельствуют многочисленные раскопки, проводимые на территории современной Северной Африки, косметические протезы устанавливали уже в Древнем Египте. Они изготавливались из дерева, выполняли ограниченные функции, а к телу крепились специальными кожаными ремнями.
Первый функциональный заменитель предплечья и кисти датируется XVI столетием, он принадлежал рыцарю Гецу фон Берлихигену, потерявшему руку в бою. В России первый механический протез ноги появился в 1791. Его собрал легендарный Иван Кулибин.
Первым крупным предприятием по производству искусственных рук и ног стал Петроградский институт протезирования. Он был основан в 1919 году на базе Мариинского приюта для увечных воинов, где уже с 1880-х годов работала мастерская по изготовлению таких приспособлений. Фото старинных и более современных протезов доступны всем желающим. По ним можно изучить эволюцию таких приспособлений.
Фото старинных и более современных протезов доступны всем желающим. По ним можно изучить эволюцию таких приспособлений.
Функциональные бионические конструкции, которые управляются путем отправки сигналов головным мозгом, появились только в XXI веке. Сейчас самые современные протезы рук и ног постоянно совершенствуются, развиваются. Такие конструкции пока не в силах полностью заменить все функции конечности. Их чувствительность, мелкая моторика не столь развита, но прогресс не останавливается, появляются новые технологии и в перспективе потеря конечности выше колена перестанет быть существенной проблемой, потому что ее можно будет заменить высокотехнологичным приспособлением по среднерыночной цене.
Технологии протезирования
Существует два основных вида протезов рук и ног:
- косметические;
- функциональные.
Первые предназначены только для красоты. Они выглядят как настоящая конечность, но такой искусственной новой рукой человек не сможет держать вилку, шариковую ручку, способно пользоваться ею.
Функциональные современные протезы можно поделить еще на три подкатегории:
- рабочие;
- бионические;
- тяговые.
Первые предназначены для выполнения конкретных заданий, работ. Такие новейшие протезы рук оснащены специальными крюками, щипковыми захватами, зажимами, другими съемными приспособлениями.
Тяговые протезы работают за счет специальных механизмом – систем тросиков, тяг, гирек, пружин. Управляются за счет сжимания-разжимания мышц. Важно проводить протезирование сразу после ампутации, чтобы культя сохранила чувствительность, мышцы не атрофировались.
Бионическая современная конструкция – протез руки нового поколения, который управляется за счет отправки сигналов от головного мозга по нервным волокнам. Грубо говоря, человек управляет искусственной конечностью силой мысли. На основе таких технологий создаются и искусственные ноги. По актуальным фото и видео таких моделей можно оценить их достоинства.
Материалы, используемые при производстве
Новый протез ноги или руки состоит из следующих конструктивных элементов:
- культеприемная гильза;
- каркас;
- система механического или электронного управления.

При производстве современных протезов новых поколений применяют легкие сплавы металлов высокой прочности, углепластик, полимерные материалы, силикон. Цена такой модели зависит от применяемых технологий.
Бионические протезы – новые достижения ведущих производителей
Бионические современные протезы – модели самых новых поколений, которые конструируются индивидуально с использованием электронного оборудования. Работают они от специальных аккумуляторов, которые нужно регулярно подзаряжать. Электрические импульсы от искусственной руки или ноги подаются к корешкам нервных окончаний и обратно. Таким способом управлять движениями можно путем подачи мозгового сигнала.
Важно научиться правильно пользоваться современным новым протезом, потому что на начальных этапах освоения этого приспособления возможны серьезные проблемы. Пациенты не всегда могут правильно рассчитать силу хвата, ширину шага, скорость ходьбы. Поэтому модель настраивается индивидуально под физиологические особенности каждого пациента при помощи электронной системы управления.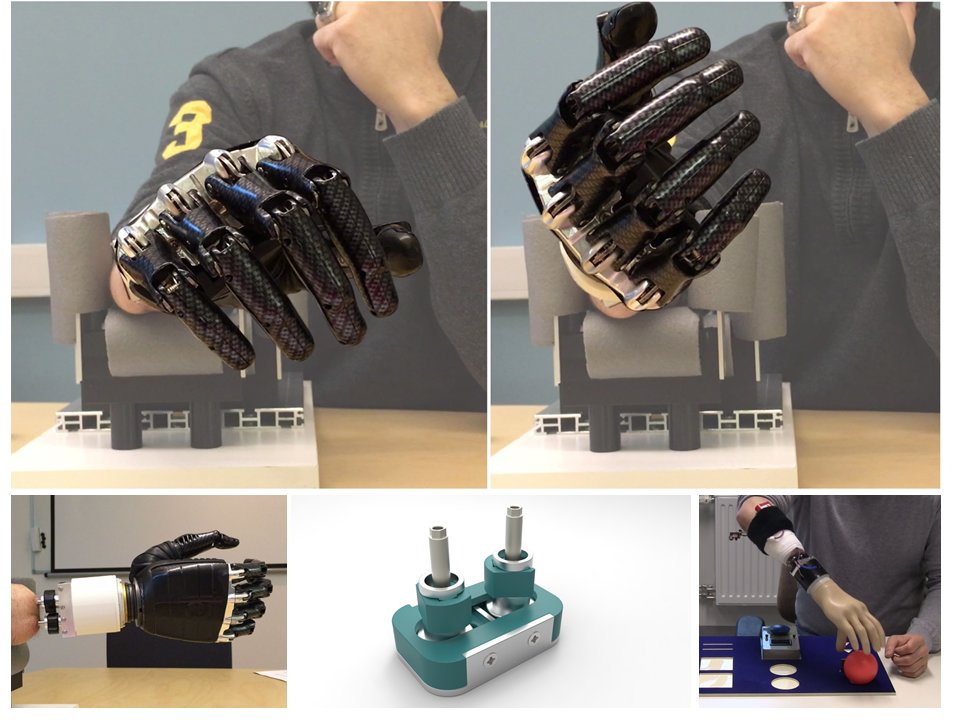
Современные протезы для ног выше колена, как и другие подобные конструкции важно установить в первые 60 дней после ампутации. Этот период называют «золотым окном» для протезирования. Важно учитывать и психологическое состояние пациента. Нередко люди после ампутации впадают в глубокую депрессию. А успешное освоение функций новых конструкций и привыкание к ним напрямую зависит от желания пациента.
Будущее протезирования
Наука не стоит на месте, со временем медицина научится пересаживать руки и ноги выше колена, возвращая функциональность поврежденных частей тела. Но пока что большие надежды возлагаются на современные бионические технологии протезирования. Ученые и медики рассчитывают, что роботизированные заменители рук и ног выше колена новых поколений смогут со временем выполнять абсолютно все функции, доступные настоящим конечностям.
Удивительные бионические протезы нового поколения — видео
 youtube.com/embed/S54T-lU0f6A» title=»YouTube video player» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>
youtube.com/embed/S54T-lU0f6A» title=»YouTube video player» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>Российские производители
Медицинский центр «Ортопром» изготавливает все виды новых протезов, фото доступны в каталоге производителя. В нашей стране работают и другие компании – «Орто-Космос», MaxBionic, «Моторика», «Сколиолоджик». Их цена существенно ниже иностранных аналогов, но по техническим характеристикам они не уступают другим устройствам, выпускаемым в Европе и США.
Заказать современный протез руки или ноги
Запишитесь на
бесплатную консультацию!
записаться
Статьи по теме:
- Как получить ИПР
- Как живут с протезами
- Как ходить с протезом ноги
- Оформление МТК
Все услуги по протезированию:
- Детское протезирование
- Протезирование бедра (ног выше колена)
- Протезирование голени (ног ниже колена)
- Протезирование нижних конечностей (ног)
- Ортопедические корсеты
- Протезирование после вычленения
- Протезирование стопы
- Ремонт протезов
- Ортезирование
- Изготовление туторов
- Протезирование верхних конечностей (рук)
- Протезирование кисти
- Протезирование пальцев ног
- Протезирование пальцев рук
- Протезирование плеча
- Протезирование предплечья
Протезы рук: виды и перспективы развития
До недавнего времени протезы прикреплялись к человеческому телу механически и не были связаны с нервной системой.
Они могли сгибаться в железных шарнирах, однако выполнение каждого движения владелец должен был регулировать вручную.
Целью ученых стала возможность управлять механическими конечностями с помощью силы мысли – так, как это происходит у обычных людей. Сделать это удалось, однако в первое время набор команд был ограниченным, поэтому мелкая моторика оставляла желать лучшего.
Сегодня специалисты в области робототехники обеспечили полную связь протезов с нервной системой их носителей.
В тот момент, когда человек без руки хочет пошевелить пальцем, мозг генерирует соответствующий сигнал, идущий по нервам к мышцам конечности. Импульс перехватывают специальные датчики, встроенные в протез, и не дают ему уйти «в пустоту». После анализа и обработки данных формируется команда управления роботизированной рукой.
Именно по этому пути шли и продолжают идти многочисленные научные группы, занимающиеся разработкой новейших функциональных протезов.
О том, какие виды протезов рук выпускаются сегодня и какими способами производители повышают надежность этих дорогостоящих устройств, читайте далее.
Итак, протезы рук представляют собой искусственные заменители поврежденных или отсутствующих верхних конечностей. Сам термин «протез» произошло от греческого слова prosthesis, которое переводится как «присоединение, прикрепление».
Прототипы современных многофункциональных устройств появились еще до нашей эры. Древние полководцы, потерявшие руки в боях, имитировали их присутствие деревянными или металлическими конструкциями.
С развитием механики стали появляться более совершенные заменители конечностей, которые могли двигаться.
В 19 веке существовали рабочие и косметические протезы. Первые позволяли людям с ограниченными возможностями выполнять определенные профессиональные действия. Они представляли собой кожаные бандажи с арматурой для крепления нужного инструмента.
Они представляли собой кожаные бандажи с арматурой для крепления нужного инструмента.
Косметические протезы того времени не только имели внешний вид руки, но и позволяли производить достаточно сложные действия (например, писать).
В настоящее время сфера протезирование развивается огромными темпами. Разработчики современных реабилитационных устройств используют последние достижения робототехники, лучшие конструкционные и сервисные материалы.
Давно известно, что в процессе эксплуатации движущиеся механизмы подвержены износу, коррозии и другим неприятным моментам, которые способны повлиять на срок их службы. Протезы – не исключение.
Ранее при сборке и обслуживании этих устройств применялись стандартные пластичные смазки. Однако со временем стало ясно, что при ежедневной эксплуатации протезов смазки выдавливаются из зон трения, пачкают окружающие области и кожу человека. Это негигиенично, а самое главное, небезопасно, так как испарения некоторых материалов токсичны.
Сегодня на смену пластичным смазкам пришли современные высокотехнологичные покрытия. Они значительно улучшают характеристики протезов рук и при этом не наносят никакого вреда здоровью людей.
Покрытия наносятся спироидную зубчатую передачу привода. На деталях они формируют тонкий, но прочный композиционный слой, выравнивающий поверхности и увеличивающий тем самым их опорную площадь. Обработанные элементы имеют низкий коэффициент трения и защищены от коррозии, поэтому их износ минимален.
На фото ниже представлены детали привода протеза руки ДО и ПОСЛЕ нанесения отечественного твердосмазочного покрытия MODENGY 1014.
Для людей, утративших конечности вследствие несчастных случаев или болезней, установка протезов является важнейшим этапом социально-трудовой реабилитации.
Современный протез – не просто механическая замена утерянному органу, это уникальная часть тела, которая обеспечивает ему новые, невиданные ранее возможности.
В настоящее время наиболее распространены функциональные (активные) протезы. В отличие от косметических, выполняющих исключительно декоративную функцию, активные устройства позволяют их обладателям производить какие-либо действия.
По принципу работы функциональные протезы подразделяются на механические и бионические. Устройства могут иметь косметическую оболочку, имитирующую внешний вид руки, либо современный высокотехнологичный дизайн.
Активные механические протезы
Такие устройства не содержат какой-либо электроники и управляются усилиями различных отделов руки с помощью тяг. Благодаря простому принципу действия механические протезы могут устанавливаться с самого раннего возраста.
Сильная сторона тяговых устройств – возможность контролировать прилагаемую силу. Например, при выполнении хвата человек сам определяет степень сжатия предмета и скорость реакции.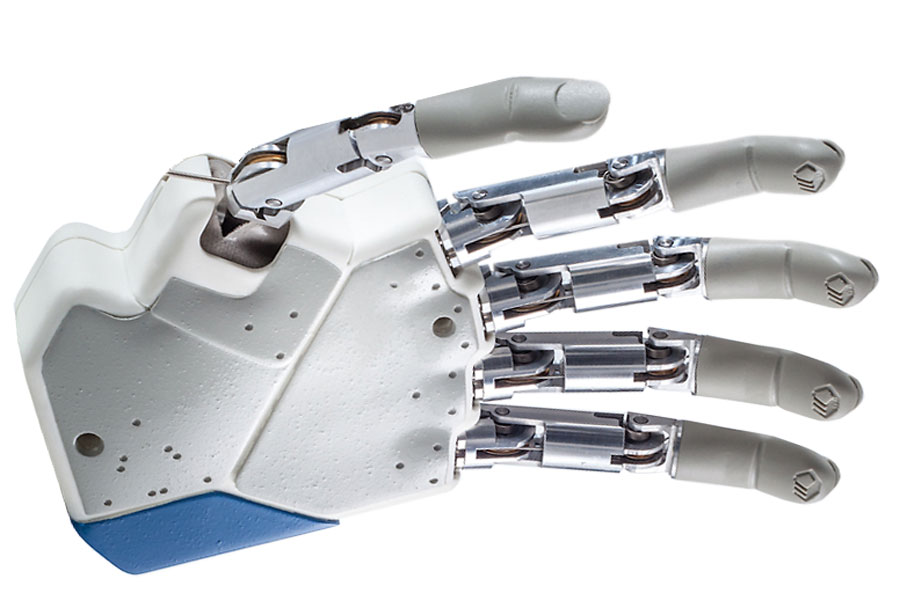 Когда искусственная конечность упирается в предмет и не может продолжать действия, ее обладатель чувствует сопротивление.
Когда искусственная конечность упирается в предмет и не может продолжать действия, ее обладатель чувствует сопротивление.
Активные тяговые протезы позволяют писать, зажигать спички, перемещать посильные грузы, плавать, играть в теннис и выполнять множество других операций.
Слабая сторона устройств этого типа – ограниченность силы хвата возможностями самого человека. Например, при недостаточном развитии лучезапястного или локтевого суставов управление тяговым протезом может быть затруднено.
Бионические протезы
Такие устройства являются самыми современными и многофункциональными заменителями верхних конечностей. Их также называют биоэлектрическими, или миотоническими.
Управление бионическим протезом осуществляется за счет сигналов, возникающих при сокращении мышц. Миодатчики, встроенные в культеприемную гильзу, улавливают их, а затем передают на микропроцессор кисти. Компьютерные алгоритмы преобразовывают информацию в двигательные команды – в результате протез выполняет определенный жест или хват.
Компьютерные алгоритмы преобразовывают информацию в двигательные команды – в результате протез выполняет определенный жест или хват.
В простые бионические аппараты встроены 2 мышечных датчика, которые регистрируют активность двух наиболее крупных мышц. С этим связаны некоторые неудобства при использовании таких протезов: иногда, чтобы выполнить одно движение, нужно отправить целый ряд повторяющихся команд. Только после этого происходит своеобразное переключение режимов.
Этого недостатка лишены высокотехнологичные бионические устройства. Встроенные банковские мини-таги, гибкие дисплеи, GSM-модули, различные режимы управления делают такие протезы больше похожими на мини-компьютеры.
Последние модели бионических аппаратов дают человеку возможность чувствовать тепло и давление посредством датчиков, сигнал от которых поступает в кожу культи.
Устройства функционально-косметического типа практически не отличаются от естественных конечностей по цвету и фактуре. На косметическую оболочку наносят родинки, вены и линии ладоней, ногти для большей правдоподобности выполняют из акрила.
На косметическую оболочку наносят родинки, вены и линии ладоней, ногти для большей правдоподобности выполняют из акрила.
Косметические протезы
Косметические протезы предназначены для воссоздания внешнего (физического) вид руки. Такие устройства (особенно заменители кисти) часто изготавливают из силикона как наиболее мягкого, упругого и естественно выглядящего материала.
Косметические протезы устанавливаются, как правило, временно – на период изготовления уникальной функциональной модели, которая подбирается индивидуально в каждом случае протезирования.
На российском рынке практически не производятся бионические протезы рук, вернее, они слабо введены в коммерческое использование из-за дороговизны.
Разработки и испытания ведут несколько отечественных компаний, которые в скором будущем надеются запустить свою продукцию на мировой рынок.
Свои стартапы ведет компания «Моторика», известная внедрением в федеральную программу обеспечения инвалидов техническими средствами реабилитации тяговых протезов для детей.:no_upscale()/cdn.vox-cdn.com/uploads/chorus_asset/file/6615425/Screen_Shot_2016-06-08_at_12.14.16_PM.0.png)
«Моторика» работает над миоэлектрическим протезом кисти Stradivary, установка которого не требует хирургического вмешательства. Поверхностные миодатчики встраиваются в приемную гильзу и касаются определенных мест в зоне мышц. Улавливая потенциал при их сокращении, они передают сигнал на раскрытие или закрытие кисти.
Основная проблема, с которой столкнулись специалисты «Моторики» при установке миоэлектрического протеза – слабо развитые мышцы предплечья. Тренировать их как раз помогают тяговые механические устройства, которые выпускает компания.
По мнению основателя «Моторики», существует два основных направления развития бионических протезов. Первое – это придание им чувствительности, то есть организация обратной связи, которая позволит владельцу устройства получать информацию о качествах объекта, к которому он прикасается.
Второе – вживление всех элементов, включая каркас и датчик. Даже самые современные протезы необходимо снимать на время сна или принятия ванны. После того, как разработчики добились соответствия протезов оригинальным конечностям по внешнему виду и функциям, осталось сделать их постоянной частью человеческого организма, не требующей дополнительного ухода.
После того, как разработчики добились соответствия протезов оригинальным конечностям по внешнему виду и функциям, осталось сделать их постоянной частью человеческого организма, не требующей дополнительного ухода.
Возврат к списку
Технологии возможностей — Протезирование будущего. Компания «Техбионик» представила доступные многофункциональные бионические протезы
- Главная / Новости /
- Протезирование будущего. Компания «Техбионик» представила доступные многофункциональные бионические протезы
16-08-2022, 09:00
В России разработали линейку доступных многофункциональных бионических протезов рук. О средствах реабилитации нового поколения рассказал создатель компании «Техбионик» Станислав Муравьёв.
Многофункциональные бионические протезы рук, управляемые биоэлектрическими сигналами мышц и выполняющие несколько шаблонов схватов, по сравнению с протезами других типов, предоставляют пользователю гораздо более широкие функциональные возможности. По мнению экспертов, именно это направление протезирования сегодня является ключевым и именно его следует развивать. Однако, представленные на рынке многофункциональные протезы имеют достаточно высокую стоимость и зачастую не подходят для детского протезирования.
По мнению экспертов, именно это направление протезирования сегодня является ключевым и именно его следует развивать. Однако, представленные на рынке многофункциональные протезы имеют достаточно высокую стоимость и зачастую не подходят для детского протезирования.
Протезы, разработанные «Техбионик», подходят для протезирования людей всех возрастов, включая детей младшего школьного возраста. Они обладают системой сенсорной обратной связи с тактильным откликом, ограничивающей силу давления на поверхность удерживаемого предмета и облегчающей управление протезом.
«Мне хотелось бы, чтобы те средства реабилитации, которые сейчас нам кажутся очень высокотехнологичными и крутыми, в будущем вызывали у нас улыбку, потому что были бы созданы намного более продвинутые, удобные в использовании и технологичные протезы, экзоскелеты, другие средства реабилитации», – говорит Станислав Муравьёв, герой проекта «Победители».
Первым испытателем рабочих прототипов изделий «Техбионик» стала женщина с врожденной аномалией развития кисти. Инженеры компании сразу столкнулись с проблемой – где размещать приводные системы, которые обычно устанавливаются в искусственной кисти протеза, что в данном случае сделать было невозможно.
Инженеры компании сразу столкнулись с проблемой – где размещать приводные системы, которые обычно устанавливаются в искусственной кисти протеза, что в данном случае сделать было невозможно.
В результате родилась концепция модульного устройства, в котором искусственные пальцы будут изготавливаться в виде отдельных приводных модулей, а затем размещаться на культиприёмной перчатке или внутри искусственной кисти протеза. Такой подход, благодаря высокой степени унификации деталей, позволил существенно снизить стоимость, сроки изготовления и обслуживания протезов.
«Наш протез – это своего рода некий конструктор, содержащий унифицированные детали и элементы. Из этого модульного конструктора мы можем собрать, как протез при частичном отсутствии кисти, так и протезы предплечья и плеча для соответствующих типоразмеров. Всего в нашей линейке 8 протезов разного функционала и типоразмера для детей, подростков и взрослых. Самый маленький – протез предплечья или плеча, с искусственной кистью малого типоразмера. Чтобы было понятно, эта кисть соответствует размеру руки ребёнка 5-7 лет», – говорит Станислав Муравьёв.
Чтобы было понятно, эта кисть соответствует размеру руки ребёнка 5-7 лет», – говорит Станислав Муравьёв.
В протезах, разработанных компанией «Техбионик», предусмотрено выполнение различных программируемых шаблонов схватов искусственных пальцев. В большинстве аналогичных протезов переключение таких схватов происходит через отдельную кнопку на самом устройстве. Станислав Муравьёв пошёл по другому пути. В бионических протезах компании «Техбионик», помимо ручного переключения настроек, предусмотрена возможность с помощью нейронных сетей обучать протез переключению схватов жестами, выбираемыми самим пользователем. Достаточно махнуть рукой, будто рисуешь в воздухе символ, и устройство переключится на нужный режим.
Настройка и регулировка протезов проводится через кроссплатформенное веб-приложение, работающее на компьютерах, мобильных устройствах под управлением различных операционных систем.
Промышленное производство бионических протезов «Техбионик» было запущено летом 2021 года. Тогда же в компанию обратились руководители проекта «Дети войны» с телеканала RT и предложили помочь с протезированием детей, пострадавших из-за обстрелов населённых пунктов Донбасса. Именно для ребёнка, приехавшего из ДНР, «Техбионик» изготовили свой первый серийный протез.
Тогда же в компанию обратились руководители проекта «Дети войны» с телеканала RT и предложили помочь с протезированием детей, пострадавших из-за обстрелов населённых пунктов Донбасса. Именно для ребёнка, приехавшего из ДНР, «Техбионик» изготовили свой первый серийный протез.
Следующим пациентом компании стал 22-летний Ярослав Гусев. Его семья живёт недалеко от Донецка – в Ясиноватой. Многие годы населённый пункт обстреливает ВСУ. Про всей территории Ясиноватой можно найти осколки, разорвавшиеся и не разорвавшиеся боеприпасы. Пять лет назад Ярослав подобрал с земли непонятный предмет, который сразу же взорвался у него в ладони. Так молодой человек лишился руки.
Чтобы сделать современный протез, потребовалось несколько примерок. Конструкторы компании «Техбионик» создали бионическую руку, где пальцы разделены на фаланги. Ими удобно обхватить руль, чтобы управлять автомобилем, или взять кружку с чаем. Устройство заряжается, как обычный сотовый телефон, а аккумулятора хватает на целый день работы.
Собрать деньги на изготовление протеза для Ярослава помогли проект «Дети войны» и фонд «Доктор Лиза».
Подробнее с компанией и уникальными бионическими протезами российского производства можно познакомиться на официальном сайте «Техбионик»: https://techbionic.com.
Поддержка проектов, Инструменты поддержки, Партнёры, Проекты, Полигон
ТЕХБИОНИК | Участник проекта «Сколково»
ОБЩЕСТВО С ОГРАНИЧЕННОЙ ОТВЕТСТВЕННОСТЬЮ «БИОНИЧЕСКИЕ ТЕХНОЛОГИИ»
Биомедицина
О компании
Техбионик является одним из ведущих разработчиков высокотехнологичных и многофункциональных средств реабилитации. Компанией осуществляется полный цикл разработки, начиная с научных исследований и заканчивая коммерциализацией результатов. В частности разработана линейка бионических протезов верхних конечностей с микропроцессорным управлением SmartLi, особенностью которых является модульная конструкция, что позволяет обеспечить высокую степень унификации деталей и уменьшить затраты на подготовку производства и выпуск продукции. Линейка SmartLi включает в себя как протезы для различных уровней ампутации, так и для различного возраста, в том числе детские. В настоящее время компания приступила к продажам данных протезов.
Линейка SmartLi включает в себя как протезы для различных уровней ампутации, так и для различного возраста, в том числе детские. В настоящее время компания приступила к продажам данных протезов.
Совместно с ведущими научными центрами и компаниями Техбионик разработало тренажер-экзокисть, а также участвует в разработке роботизированных ортопедических аппаратов (легких экзоскелетов) для нижних и верхних конечностей.
В компании работают специалисты, имеющие научные степени и звания, а генеральный директор неоднократно становился победителем профильных конкурсов: Инженер года, премия В.А. Ревунова, премия Губернатора Новгородской области в номинации Молодой ученый-исследователь.
Проектный менеджерЮлияЩеглова
Проектный менеджерЮлияЩеглова
Проекты
Описание проекта
Представленные на рынке многофункциональные бионические протезы рук имеют достаточно высокую стоимость и зачастую не доступны для отечественных потребителей. Кроме того, продуктовые линейки производителей протезов редко включают в себя решения для протезирования детей младшего школьного и подросткового возраста, для протезирования кисти.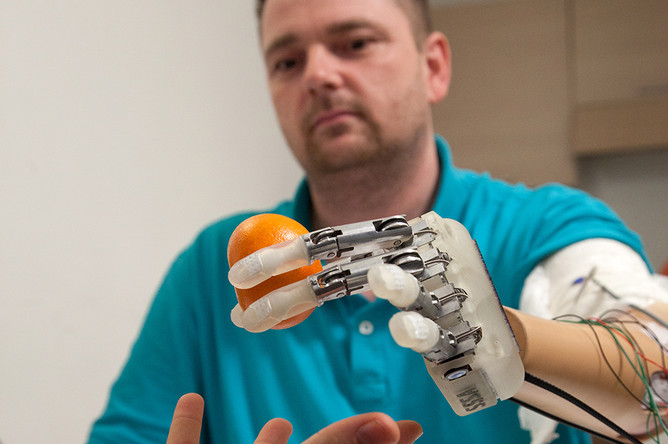
Проект направлен на разработку и организацию производства доступных и высокотехнологичных модульных бионических протезов рук, управляемых биоэлектрическими сигналами мышц.
Модульная конструкция обеспечивает возможности изготовления протезов для детей школьного возраста и взрослых при различных случаях ампутаций или врождённых аномалий верхних конечностей, позволяет реализовывать несколько переназначаемых шаблонов схватов, снижает стоимость, сроки изготовления и ремонта протезов.
Для решения производственных и бытовых задач, имеются рабочие версий протезов, оснащенных набором быстросъемных губок и насадок.
Наличие сенсорной системы обратной связи и тактильного виброотклика повышает качество взаимодействия пользователя с протезом.
Кроссплатформенное мобильное приложение позволяет производить детальную настройку функций протеза, проводить активную двигательную реабилитацию с использованием дополнительного игрового ПО для персонального компьютера.
Финансовая поддержка
Компания поддержана институтами развития:
ФОНД «СКОЛКОВО»
5 000 000 ₽
Руководитель
МУРАВЬЁВСТАНИСЛАВАЛЕКСАНДРОВИЧ
ГЕНЕРАЛЬНЫЙ ДИРЕКТОР
Маркетинговые материалы
Презентации
1640281165_Презентация1207211
Фотографии
Интеллектуальная собственность
| 2021 год | |
Промышленный образец 126473 ПРОТЕЗ РУКИ SMARTLI | |
| 2020 год | |
Полезная модель 196466 МОДУЛЬ ПЕРЕКЛЮЧЕНИЯ СХВАТОВ ФУНКЦИОНАЛЬНОГО ПРОТЕЗА | |
Свидетельство о государственной регистрации программы для ЭВМ 2020663114 ПРОГРАММА УПРАВЛЕНИЯ НЕЙРОМОДУЛЕМ РОБОТИЗИРОВАННОГО ОРТЕЗА | |
| 2019 год | |
Полезная модель 192333 МОДУЛЬНЫЙ БИОНИЧЕСКИЙ ПРОТЕЗ РУКИ | |
Свидетельство о государственной регистрации программы для ЭВМ 2019611175 ПРОГРАММА УПРАВЛЕНИЯ МОДУЛЬНЫМ БИОНИЧЕСКИМ ПРОТЕЗОМ | |
Свидетельство о государственной регистрации программы для ЭВМ 2019611329 ПРИЛОЖЕНИЕ «SMARTLI CONTROL» ДЛЯ НАСТРОЙКИ БИОНИЧЕСКОГО ПРОТЕЗА | |
Товарный знак, знак обслуживания 738502 ТОВАРНЫЙ ЗНАК, ЗНАК ОБСЛУЖИВАНИЯ | |
| 2018 год | |
Полезная модель 176303 БИОНИЧЕСКИЙ ПРОТЕЗ КИСТИ РУКИ | |
События
2020 год
Участник конкурса
SBazaar2020
Участник мероприятия
Форум «Открытые Инновации 2020»
2019 год
Участник мероприятия
Форум «Открытые инновации 2019»
Участник конкурса
PatentsPower 2019
Участник мероприятия
Startup Village 2019
Упоминание в СМИ
http://techbionic. com
com
Официальный сайт
21.09.2022sk.ru
Ростех показал на форуме «Биотехмед» роботизированные протезы
05.03.2021sk.ru
Масштабная апробация отечественных модульных бионических протезов «SmartLi» для людей с частичной ампутацией кисти руки завершена
26.02.2021sk.ru
Уникальный модульный биопротез КРЭТ успешно прошел испытания
05.10.2020sk.ru
«Техбионик» начнет серийное производство модульных протезов на мощностях предприятия «Ростеха»
Информация о компании
Учредители
МУРАВЬЁВ СТАНИСЛАВ АЛЕКСАНДРОВИЧ
Уставный капитал
10 000 ₽
173016, Новгородская область, Г.О. ВЕЛИКИЙ НОВГОРОД, Г ВЕЛИКИЙ НОВГОРОД, УЛ КОСМОНАВТОВ, Д. 22, КВ. 24
Похожие компании
Биомедицина
КЛАЙБЕР БИОНИКС
Бионический протез руки KleiberHand
Биомедицина
НЕЙРОМЕХ
Универсальное программное обеспечение для управления мехатронными системами
Биомедицина
ИЦ МОТОРИКА
Роботизированные протез плеча с инерциальной системой управления
Биомедицина
МИОЛИМБ
Протез кисти с блоком тактильной обратной связи
Биомедицина
МОТОРИКА СЕНС
Модуль чувствительности для протезов рук
Биомедицина
МАКСБИОНИК
МаксБионик
Биомедицина
МОТОРИКА
«Экспресс протезирование» («Express-Prosthesis»)
Биомедицина
ГРУППА КОМПАНИЙ САЛЮТ ОРТО
Проектирование и разработка инновационных коленных модулей для протезов ног
Биомедицина
СЕНСОМЕД
Программно-аппаратный комплекс Senso Rehab
Биомедицина
ИННОВАЦИЯ-Н
Трансформируемая инвалидная коляска с изменяемой базой и возможностью движения боком
Биомедицина
ВАЙБРЕЙНТ РУС
VIBRAINT RehUp: нейрореабилитационный тренажер на основе интерфейса мозг компьютер
Биомедицина
СЕНСОР-ТЕХ
«Платформенная технология интеллектуальных решений для инвалидов с сенсорными нарушениями»
Промтех
ОБРАЗОВАТЕЛЬНАЯ РОБОТОТЕХНИКА
Технология управления движениями и взаимодействием с объектом манипулирования при неудерживающем контакте и неполноприводной динамике в робототехнических приложениях
Биомедицина
КАРДИОТЕХНИКА
Разработка биоинжинирингового протеза клапана сердца для пожизненной имплантации
Биомедицина
ЭКЗОСИСТЕМЫ
«Активный экзоскелет промышленного применения»
МАНДАРИНЛАБ
MandarinBank
Протез руки следующего поколения: от биомиметики к биореалистичности Yu Wang,
5,6 Ting Zhang, 7 Peng Fang, 8
и Chih-hong Chou 1,2
1 Институт медицинской робототехники, Шанхайский университет Тун Цзи
2 Лаборатория инженерной нейрореабилитации, Школа биомедицинской инженерии, Шанхайский университет Цзяо Тонг, Шанхай, Китай
3 Отделение реабилитационной медицины, больница Жуйцзинь, медицинский факультет Шанхайского университета Цзяо Тонг, Шанхай, Китай
4 Центр передового опыта в области изучения мозга и интеллектуальных технологий Китайской академии наук, Шанхай, Китай
5 Школа биологических наук и медицинской инженерии, Бейханский университет, Пекин, Китай
6 Пекинский передовой инновационный центр биомедицинской инженерии, Школа биологических наук и медицинской инженерии, Бейханский университет, Пекин, Китай
7 i-lab, Ключевая лаборатория многофункциональных наноматериалов и интеллектуальных систем, Сучжоуский институт нанотехнологий и нанобионики, Китайская академия наук, Сучжоу, Китай
8 Шэньчжэньский институт передовых технологий, Китайская академия наук, Шэньчжэнь, Китай. Имитация анатомической структуры или внешнего вида человеческой руки не приводит к улучшению нейронной связи с сенсомоторной системой людей с ампутированными конечностями. Функции современных протезов рук не соответствуют ловкости руки человека, в первую очередь из-за отсутствия сенсорной осведомленности и податливого срабатывания. В последнее время прогресс в восстановлении сенсорной обратной связи стал значительным шагом вперед в улучшении нейронной непрерывности сенсорной информации от протезов рук до людей с ампутированными конечностями. Тем не менее, было предпринято мало усилий, чтобы воспроизвести свойство податливости биологических мышц при приведении в действие протезов рук. Более того, полноценный биореалистичный подход к проектированию протезов рук не рассматривался в исследованиях нейропротезов. В этой перспективной статье мы продвигаем новый взгляд на то, что протез руки может гармонично интегрироваться с людьми с ампутированными конечностями только в том случае, если будет достигнута нейронная совместимость с сенсомоторной системой.
Имитация анатомической структуры или внешнего вида человеческой руки не приводит к улучшению нейронной связи с сенсомоторной системой людей с ампутированными конечностями. Функции современных протезов рук не соответствуют ловкости руки человека, в первую очередь из-за отсутствия сенсорной осведомленности и податливого срабатывания. В последнее время прогресс в восстановлении сенсорной обратной связи стал значительным шагом вперед в улучшении нейронной непрерывности сенсорной информации от протезов рук до людей с ампутированными конечностями. Тем не менее, было предпринято мало усилий, чтобы воспроизвести свойство податливости биологических мышц при приведении в действие протезов рук. Более того, полноценный биореалистичный подход к проектированию протезов рук не рассматривался в исследованиях нейропротезов. В этой перспективной статье мы продвигаем новый взгляд на то, что протез руки может гармонично интегрироваться с людьми с ампутированными конечностями только в том случае, если будет достигнута нейронная совместимость с сенсомоторной системой. Наши текущие исследования подтверждают, что протез руки следующего поколения должен включать в себя биологически реалистичные исполнительные, сенсорные и рефлекторные функции, чтобы полностью достичь нейронной совместимости.
Наши текущие исследования подтверждают, что протез руки следующего поколения должен включать в себя биологически реалистичные исполнительные, сенсорные и рефлекторные функции, чтобы полностью достичь нейронной совместимости.
1. Исходная информация
Современные протезы рук имитируют анатомическую структуру и внешний вид человеческой руки, но упускают из виду биологические основы срабатывания и восприятия, таким образом, у них отсутствуют аналогичные функциональные возможности сенсомоторной системы человека. Многие люди с ампутированными конечностями отказываются от протезов рук из-за трудностей с контролем и отсутствия тактильного восприятия при захвате предметов [1]. Сложный протез руки часто работает не лучше, чем простой захват, приводимый в действие контралатеральным плечом через трос, который обеспечивает расширенную физиологическую проприоцепцию (ППП) [2]. Жесткая двигательная активация не дает протезу руки податливости для захвата мягких или хрупких предметов.
Люди разработали эффективные стратегии ловкого контроля хвата рук без детального планирования движений на исполнительном/эффекторном уровнях. Биологические механизмы возникают в результате податливой активации мышц и богатых сенсорных афферентов от проприорецепторов и кожных рецепторов. Эти преимущества биологического сенсомоторного контроля позволяют адаптивно приспосабливать жесткость рук к пальцам к жесткости захваченного объекта без точного планирования движений пальцев. Здесь мы продвигаем мнение о том, что восстановление биологически реалистичной податливой активации и тактильной сенсорной обратной связи в протезной руке может трансформировать функции захвата протеза [3-7].
Биологические механизмы возникают в результате податливой активации мышц и богатых сенсорных афферентов от проприорецепторов и кожных рецепторов. Эти преимущества биологического сенсомоторного контроля позволяют адаптивно приспосабливать жесткость рук к пальцам к жесткости захваченного объекта без точного планирования движений пальцев. Здесь мы продвигаем мнение о том, что восстановление биологически реалистичной податливой активации и тактильной сенсорной обратной связи в протезной руке может трансформировать функции захвата протеза [3-7].
2. Сенсомоторный контроль человека
Сенсомоторный контроль человека служит идеальной моделью для протезов рук. Иерархическая метафора биологического моторного контроля, показанная на рис. 1(а), может помочь преодолеть разрыв в понимании моторного контроля между человеком и робототехникой/протезированием. Верхний уровень мозга программирует грубые аспекты движений в суставах или конечных точках конечностей. Затем движения преобразуются в конкретные двигательные команды для мышц на уровне позвоночника за счет мышечной синергии [8]. Интернейроны, особенно проприоспинальные нейроны (PN) [9, 10], в спинном мозге может формироваться такой модуль мышечных синергий. На нижнем уровне двигательные команды выполняются мышцами, действующими на суставы конечностей. Мозг хорошо информирован проприоцепторами и кожными рецепторами, которые контролируют процесс и результат захвата руки. Однако ампутация нарушает как эфферентные, так и афферентные сенсомоторные сигналы. Достижение биологического срабатывания, восприятия и контроля, подобных сенсомоторной системе человека, влечет за собой восстановление нарушенных периферических сенсомоторных процессов.
Интернейроны, особенно проприоспинальные нейроны (PN) [9, 10], в спинном мозге может формироваться такой модуль мышечных синергий. На нижнем уровне двигательные команды выполняются мышцами, действующими на суставы конечностей. Мозг хорошо информирован проприоцепторами и кожными рецепторами, которые контролируют процесс и результат захвата руки. Однако ампутация нарушает как эфферентные, так и афферентные сенсомоторные сигналы. Достижение биологического срабатывания, восприятия и контроля, подобных сенсомоторной системе человека, влечет за собой восстановление нарушенных периферических сенсомоторных процессов.
Мышцы обладают сильно нелинейной биомеханикой с силой, зависящей от длины пучка и скорости сокращения, что приводит к желательному соответствию жесткости и вязкости. Вязкоупругость мышц дополнительно регулируется локальными рефлекторными цепями в пулах α -мотонейронов спинного мозга [11]. Это позволяет мозгу поддерживать равновесное положение конечностей. Податливая конечность способна справляться с неожиданными нарушениями во время движения или позы, так что мозгу не нужно явно вычислять силы и траектории конечности.
Мышцы снабжены проприорецепторами, т.е. веретенами и сухожильными органами Гольджи (GTO), которые чувствительны к растяжению и силе мышц [12]. Веретена иннервируются многочисленными γ -статическими и γ -динамическими мотонейронами, которые модулируют чувствительность веретена. γ мотонейронов совместно модулируются с α мотонейронами для обновления периферических мышц о кинематике программируемых движений мозга [13].
Зрение вычисляет местоположение статических или движущихся объектов в пространстве, что используется мозгом для планирования и направления сенсомоторных действий при дотягивании и захвате. Проприоцептивные афференты информируют мозг о состоянии мышц и положении конечностей при выполнении двигательных планов [12]. Тактильная информация от кожных рецепторов позволяет мозгу различать физические свойства захваченных объектов. Он обеспечивает мозг мультимодальностью чувств, таких как прикосновение, давление, текстура, температура и боль, чтобы человек мог эффективно манипулировать мягкими или острыми предметами.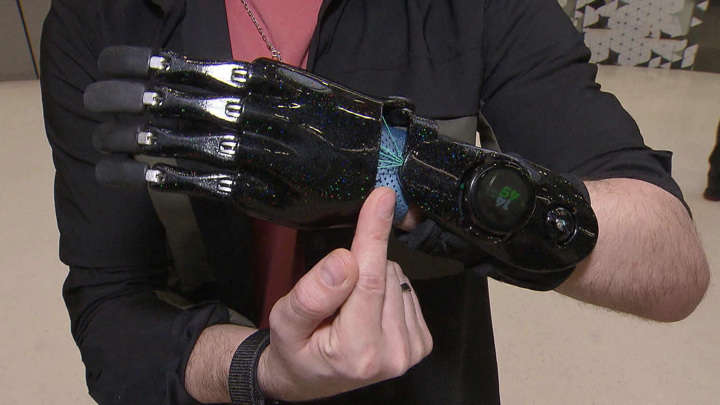 Рука без тактильных ощущений должна находиться под замкнутым контролем визуального наблюдения. Поэтому необходимо восстановить нервно-мышечный рефлекс и тактильную чувствительность у ампутантов, у которых частично доступны мышцы конечностей и полностью утрачена тактильная чувствительность руки.
Рука без тактильных ощущений должна находиться под замкнутым контролем визуального наблюдения. Поэтому необходимо восстановить нервно-мышечный рефлекс и тактильную чувствительность у ампутантов, у которых частично доступны мышцы конечностей и полностью утрачена тактильная чувствительность руки.
3. Биореалистический подход с использованием новейших технологий
Основным недостатком современной протезной системы по сравнению с человеческими конечностями является то, что эфферентная двигательная информация от мозга и афферентная сенсорная информация к мозгу прерываются, а приводы протеза представляют собой электродвигатели без уступчивая гибкость нервно-мышечной системы человека. Для восстановления функций нервной системы разработано множество имплантируемых технологий [3, 4, 7, 14, 15]. Мы сосредоточены на разработке неинвазивных и биореалистичных технологий для протезов рук следующего поколения. Рисунок 1(b) иллюстрирует потенциальный биореалистичный подход к разработке протеза руки следующего поколения. Цель состоит в том, чтобы улучшить нейронную совместимость [16] путем восстановления нарушенного нервно-мышечного рефлекса и тактильной чувствительности. К числу таких новых технологий относятся следующие:
Цель состоит в том, чтобы улучшить нейронную совместимость [16] путем восстановления нарушенного нервно-мышечного рефлекса и тактильной чувствительности. К числу таких новых технологий относятся следующие:
(i) Генеративные модели BMI декодирования двигательных сигналов: модель генеративного интерфейса мозг-машина (BMI) может обеспечить стратегию упреждающего управления для более биомиметического и гибкого управления нейропротезом для достижения и захвата [17, 18]. Эта технология находится на стадии оценки у нечеловекообразных приматов. (ii) Распознавание двигательных намерений с помощью ЭМГ высокой плотности: новые методы распознавания образов могут улучшить прогнозирование двигательных намерений на основе сигналов электромиограммы высокой плотности (ЭМГ) остаточных мышц в ампутированной конечности, что позволяет интуитивное управление движениями протеза [19]. Эта технология была применена для управления протезом руки у человека с ампутированной конечностью. (iii) Нейроморфные модели нервно-мышечной системы: можно восстановить нервно-мышечный рефлекторный процесс для протезов рук с кабельным приводом с человеческими чертами, используя нейроморфное оборудование для быстрого вычисления физиологических параметров. реалистичные модели и эмулировать человекоподобный рефлекс в реальном времени [6]. В настоящее время эта технология находится на стадии оценки для применения человеком. (iv) Неинвазивная тактильная сенсорная обратная связь: мы продемонстрировали возможность использования электрически вызванных тактильных ощущений (ETS) в качестве естественного способа передачи сенсорной информации в мозг человека с ампутированными конечностями. Этот метод сенсорной обратной связи является неинвазивным, обладает долговременной стабильностью и может снабжать людей с ампутированными конечностями множественными модальностями естественной сенсорной информации, специфичной для пальцев [5, 20]. Эта технология в настоящее время проходит оценку функциональных преимуществ у пациентов с ампутированными конечностями. (v) Селективные датчики скольжения, имитирующие окончания Руффини: гибкий тактильный датчик, вдохновленный структурой отпечатков пальцев и функцией окончаний Руффини, с избирательной чувствительностью к статическим силам и силам трения скольжения.
реалистичные модели и эмулировать человекоподобный рефлекс в реальном времени [6]. В настоящее время эта технология находится на стадии оценки для применения человеком. (iv) Неинвазивная тактильная сенсорная обратная связь: мы продемонстрировали возможность использования электрически вызванных тактильных ощущений (ETS) в качестве естественного способа передачи сенсорной информации в мозг человека с ампутированными конечностями. Этот метод сенсорной обратной связи является неинвазивным, обладает долговременной стабильностью и может снабжать людей с ампутированными конечностями множественными модальностями естественной сенсорной информации, специфичной для пальцев [5, 20]. Эта технология в настоящее время проходит оценку функциональных преимуществ у пациентов с ампутированными конечностями. (v) Селективные датчики скольжения, имитирующие окончания Руффини: гибкий тактильный датчик, вдохновленный структурой отпечатков пальцев и функцией окончаний Руффини, с избирательной чувствительностью к статическим силам и силам трения скольжения.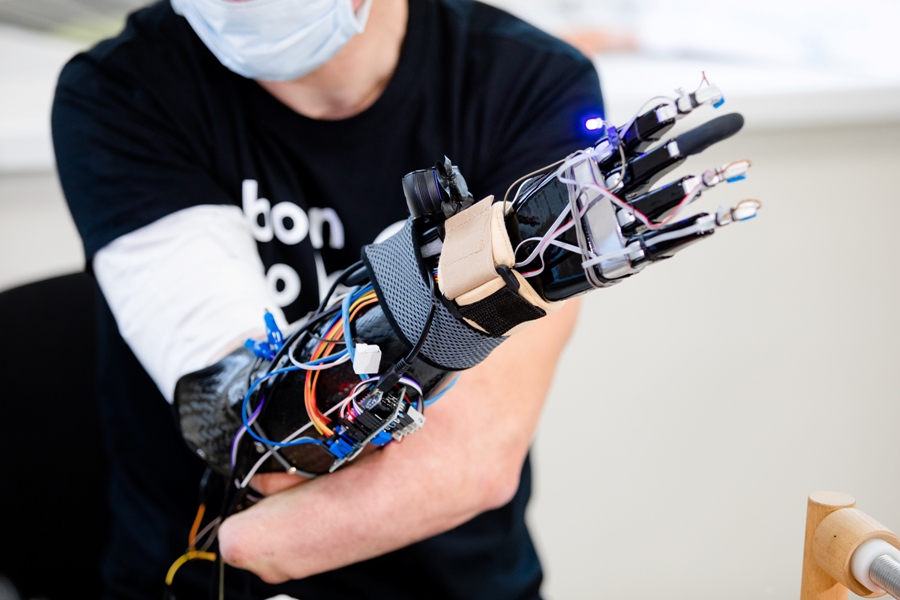 может позволить протезу руки справиться со скольжением во время захвата [21]. Доказательство концепции этой технологии завершено. Устройство находится на начальном этапе для применения человеком. (vi) Мягкий протез руки, управляемый сухожилиями: мягкий протез руки, управляемый сухожилиями, с телом пальца, выполненным из континуальной спиральной структуры из сверхэластичного материала из нитинолового сплава, может иметь естественную податливость для захвата предметов. используя простую стратегию управления [22]. Это устройство находится в уточнении структурного дизайна и функциональной оценки.
может позволить протезу руки справиться со скольжением во время захвата [21]. Доказательство концепции этой технологии завершено. Устройство находится на начальном этапе для применения человеком. (vi) Мягкий протез руки, управляемый сухожилиями: мягкий протез руки, управляемый сухожилиями, с телом пальца, выполненным из континуальной спиральной структуры из сверхэластичного материала из нитинолового сплава, может иметь естественную податливость для захвата предметов. используя простую стратегию управления [22]. Это устройство находится в уточнении структурного дизайна и функциональной оценки.
4. Заключение и перспектива
Разработка протеза руки с биореалистичными элементами сенсомоторной системы человека может повысить ее нейронную совместимость [16]. Несовместимый протез руки может привести к снижению функциональности или отторжению. Прошлые исследования накопили большой объем знаний о сенсомоторной системе человека [9, 23–26]. В настоящее время технологически зрело использование этого комплекса знаний для разработки биореалистичных протезов рук, которые восстанавливают нервно-мышечную механику [6], спинномозговые рефлексы [13] и тактильную обратную связь [3–5, 7]. Это может привести не только к превосходной производительности, но и к новому поколению протезов рук. Понимание нейронной совместимости между протезом руки и сенсомоторной системой человека может в значительной степени повлиять на дизайн протезов и терапевтических устройств [16]. Биореалистический подход также должен способствовать обратному инжинирингу для понимания нейронных механизмов управления движениями мозга у людей [27].
Это может привести не только к превосходной производительности, но и к новому поколению протезов рук. Понимание нейронной совместимости между протезом руки и сенсомоторной системой человека может в значительной степени повлиять на дизайн протезов и терапевтических устройств [16]. Биореалистический подход также должен способствовать обратному инжинирингу для понимания нейронных механизмов управления движениями мозга у людей [27].
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в связи с публикацией этой статьи.
Вклад авторов
Все авторы внесли свой вклад в окончательный вариант рукописи. Н. Лан предложил, подготовил и отредактировал рукопись; М. Хао помогал редактировать рукопись; М. Хао, К. М. Ню, Х. Цуй, Ю. Ван, Т. Чжан и П. Фанг написали по части в «Биореалистическом подходе с новыми технологиями»; и С. Чоу подготовили фигуру.
Благодарности
Эта работа была частично поддержана грантом Национальной ключевой программы исследований и разработок Китая (№ 2017YFA0701100), ключевым грантом Фонда естественных наук Китая (№ 81630050) и грантом Института медицинской робототехники Шанхайского университета Цзяо Тонг (№ IMR2018KY01). Авторы хотели бы поблагодарить других участников исследовательского проекта, в частности, доктора Вэньюань Лян, доктора Те Ли, доктора Тифенг Ли и доктора Шэн Би за их вклад в продвижение этого подхода.
Авторы хотели бы поблагодарить других участников исследовательского проекта, в частности, доктора Вэньюань Лян, доктора Те Ли, доктора Тифенг Ли и доктора Шэн Би за их вклад в продвижение этого подхода.
Ссылки
- E. Biddiss и T. Chau, «Протезирование верхних конечностей», American Journal of Physical Medicine & Rehabilitation , vol. 86, нет. 12, стр. 977–987, 2007 г. Посмотреть на: Сайт издателя | Google Scholar
- Д. С. Чайлдресс, «Управление с обратной связью в протезных системах: историческая перспектива», Annals of Biomedical Engineering , vol. 8, нет. 4–6, стр. 293–303, 1980. Посмотреть на: Сайт издателя | Google Scholar
- Д. В. Тан, М. А. Шифер, М. В. Кейт, Дж. Р. Андерсон, Дж. Тайлер и Д. Дж. Тайлер, «Нейронный интерфейс обеспечивает долгосрочное стабильное естественное сенсорное восприятие», Наука Трансляционная медицина , том. 6, нет. 257, статья 257ра138, 2014. Посмотреть на: Сайт Издателя | Google Scholar
- E. D’Anna, G. Valle, A. Mazzoni et al., «Протез руки с замкнутым контуром с одновременной внутринейронной тактильной и позиционной обратной связью», Science Robotics , vol. 4, нет. 27, статья eaau8892, 2019 г. Посмотреть на сайте издателя | Google Scholar
- M. Hao, C. H. Chou, J. Zhang et al., «Восстановление специфической сенсорной обратной связи пальцев для трансрадиальных ампутантов с помощью неинвазивных вызванных тактильных ощущений», IEEE Open Journal of Engineering in Medicine and Biology , vol. 1, стр. 98–107, 2020 г. Посмотреть на: Сайт издателя | Google Scholar
- C. M. Niu, Q. Luo, C. Chou, J. Liu, M. Hao, and N. Lan, «Нейроморфная модель рефлекса для управления протезом руки в реальном времени, как у человека», Annals of Biomedical Engineering. , том. 49, нет. 2, стр. 673–688, 2021 г. Посмотреть на: Сайт издателя | Google Scholar
- С. Дж. Бенсмайя, Д. Дж. Тайлер и С. Микера, «Восстановление сенсорной информации с помощью бионических рук», Nature Biomedical Engineering , стр. 1–13, 2020 г. Посмотреть на: Сайт издателя | Google Scholar
- E. Bizzi, VCK Cheung, A. d’Avella, P. Saltiel и M. Tresch, «Объединение модулей для движения», Brain Research Reviews , vol. 57, нет. 1, стр. 125–133, 2008 г. Посмотреть на: Сайт издателя | Google Scholar
- Б. Альстермарк и Т. Иса, «Схемы для умелого достижения и захвата», Annual Review of Neuroscience , vol. 35, нет. 1, стр. 559–578, 2012 г. Посмотреть на: Сайт издателя | Академия Google
- М. Хао, Х. Хе, К. Сяо, Б. Альстермарк и Н. Лан, «Корково-мышечная передача сигналов тремора проприоспинальными нейронами при болезни Паркинсона», PLoS One , vol. 8, нет. 11, статья e79829, 2013 г. Посмотреть на: Сайт издателя | Google Scholar
- Х. Халтборн, «Спинальные рефлексы, механизмы и концепции: от Эклза до Лундберга и далее», Progress in Neurobiology , vol. 78, нет. 3–5, стр. 215–232, 2006 г. Посмотреть на: Сайт издателя | Google Scholar
- А. Прохазка, «Проприоцептивная обратная связь и регуляция движений», в Справочник по физиологии, упражнения: регуляция и интеграция множественных систем , стр. 89–127, Американское физиологическое общество, 1996, разд. 12, глава 3. См.: Google Scholar
- S. Li, C. Zhuang, M. Hao et al., «Координированный альфа- и гамма-контроль мышц и веретен в движении и позе», Frontiers in Computational Neuroscience , об. 9, с. 122, 2015 г. Посмотреть на сайте издателя | Google Scholar
- Ю. Шань, Х. Фэн и З. Ли, «Электрическая стимуляция при травмах нервной системы: ход исследований и перспективы», Acta Physico-Chimica Sinica , vol. 36, нет. 12, с. 2005038, 2020. Посмотреть на: Сайт издателя | Google Scholar
- Z. Li, Q. Zheng, Z. L. Wang и Z. Li, «Датчики с автономным питанием на основе наногенераторов для носимой и имплантируемой электроники», Research , vol. 2020 г., статья 8710686, 25 страниц, 2020 г. Посмотреть на: Сайт издателя | Google Scholar
- Н. Лан, К. М. Ниу, М. Хао, К. Чоу и К. Дай, «Достижение нейронной совместимости с сенсомоторным контролем человека в протезных и терапевтических устройствах», IEEE Transactions on Medical Robotics and Bionics , vol. 1, нет. 3, стр. 122–134, 2019 г. Посмотреть на: Сайт издателя | Google Scholar
- H. Cui, «Прямой прогноз в задней теменной коре и динамическом интерфейсе мозг-машина», Frontiers in Integrative Neuroscience , vol. 10, 2016. Посмотреть на: Сайт издателя | Google Scholar
- C. Li, Y. Zhang, T. Wang et al., «Генеративное декодирование внутрикортикальных нейронных сигналов для онлайн-управления манипулятором для перехвата движущихся объектов», Журнал серии конференций по физике , том. 1576, статья 012057, 2020 г. Посмотреть на: Сайт издателя | Google Scholar
- X. Li, O. W. Samuel, X. Zhang, H. Wang, P. Fang и G. Li, «Стратегия классификации движений на основе комбинации сигналов сЭМГ-ЭЭГ для пациентов с ампутированными конечностями», Journal нейроинженерии и реабилитации , вып. 14, нет. 1, с. 2, 2017. Посмотреть на: Сайт издателя | Google Scholar
- Ю. Ли, К. Чоу, Дж. Чжан, М. Хао и Н. Лан, «Пилотное исследование одновременной стимуляции нескольких участков для тактильной и открывающей информационной обратной связи в протезной руке», в представлен на 10-й Международной конференции IEEE/EMBS по нейронной инженерии (NER) 2021 г. , май 2021 г., виртуальный. https://neuro.embs.org/2021/. См.: Google Scholar
- Y. Li, Z. Cao, T. Li et al., «Высокоселективный биомиметический гибкий тактильный датчик для нейропротезирования», Research , vol. 2020, статья 8
2, ст. 1, 2020. Посмотреть на: Сайт издателя | Google Scholar
- Y. Yan, Y. Wang, X. Chen, C. Shi, J. Yu и C. Cheng, «Управляемый сухожилиями протез руки с использованием континуальной структуры», в 2020 42-я ежегодная международная конференция IEEE Engineering in Medicine Biology Society (EMBC) , стр. 4951–4954, Монреаль, Квебек, Канада, 2020 г. Посмотреть на: Сайт издателя | Google Scholar
- Л. Джами, «Сухожильные органы Гольджи в скелетных мышцах млекопитающих: функциональные свойства и центральные действия», Physiological Reviews , vol. 72, нет. 3, стр. 623–666, 1992. Посмотреть на: Сайт издателя | Google Scholar
- F. Zajac, «Мышцы и сухожилия: свойства, модели, масштабирование и применение в биомеханике и управлении двигателем», Критические обзоры биомедицинской инженерии , том. 17, нет. 4, стр. 359–411, 1989. Просмотр в: Google Scholar
- В. Г. Мейсфилд и Т. П. Кнеллвольф, «Функциональные свойства мышечных веретен человека», Journal of Neurophysiology , vol. 120, нет. 2, стр. 452–467, 2018 г. Посмотреть на: Сайт издателя | Google Scholar
- Р. С. Йоханссон и Дж. Р. Фланаган, «Кодирование и использование тактильных сигналов от кончиков пальцев в задачах манипулирования объектами», Nature Reviews. Неврология , том. 10, нет. 5, стр. 345–359, 2009 г. Посмотреть на: Сайт издателя | Google Scholar
- Ченг Г., Эрлих С. К., Лебедев М. и Николелис М. А. Л., «Нейроинженерные проблемы слияния робототехники и нейронауки», Science Robotics , vol. 5, нет. 49, 2020. Посмотреть на: Сайт издателя | Google Scholar
 D’Anna, G. Valle, A. Mazzoni et al., «Протез руки с замкнутым контуром с одновременной внутринейронной тактильной и позиционной обратной связью», Science Robotics , vol. 4, нет. 27, статья eaau8892, 2019 г. Посмотреть на сайте издателя | Google Scholar
D’Anna, G. Valle, A. Mazzoni et al., «Протез руки с замкнутым контуром с одновременной внутринейронной тактильной и позиционной обратной связью», Science Robotics , vol. 4, нет. 27, статья eaau8892, 2019 г. Посмотреть на сайте издателя | Google Scholar 1–13, 2020 г. Посмотреть на: Сайт издателя | Google Scholar
1–13, 2020 г. Посмотреть на: Сайт издателя | Google Scholar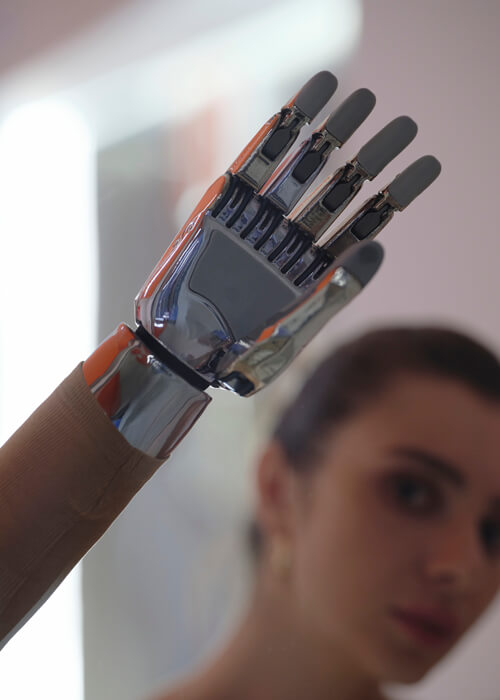 89–127, Американское физиологическое общество, 1996, разд. 12, глава 3. См.: Google Scholar
89–127, Американское физиологическое общество, 1996, разд. 12, глава 3. См.: Google Scholar 1, нет. 3, стр. 122–134, 2019 г. Посмотреть на: Сайт издателя | Google Scholar
1, нет. 3, стр. 122–134, 2019 г. Посмотреть на: Сайт издателя | Google Scholar , май 2021 г., виртуальный. https://neuro.embs.org/2021/. См.: Google Scholar
, май 2021 г., виртуальный. https://neuro.embs.org/2021/. См.: Google Scholar 17, нет. 4, стр. 359–411, 1989. Просмотр в: Google Scholar
17, нет. 4, стр. 359–411, 1989. Просмотр в: Google ScholarCopyright
Copyright © 2021 Ning Lan et al. Издательство «Обзор науки и техники» с эксклюзивной лицензией. Распространяется по лицензии Creative Commons Attribution License (CC BY 4.0).
Протез руки нового поколения: от биомиметики к биореалистичности
Потеря руки драматическим образом опустошает жизнь человека. Появление бионических рук, особенно тех, которые контролируются собственными миоэлектрическими сигналами человека с ампутированной конечностью, считается революцией в биоинженерии, призванной помочь людям с ограниченными возможностями. По мере того, как протезы меняются на рынке уже более полувека, все больше и больше пользователей отказываются от них из-за трудностей с контролем и неощутимых захватов протезом руки. Восстановление чувства контакта с протезами рук в последние годы повысило уверенность людей с ампутированными конечностями в том, что они могут брать предметы и манипулировать ими так же, как и нормальной рукой. Однако управление современными протезами рук все еще примитивно по сравнению с человеческой рукой. Профессор Нин Лан из Шанхайского университета Цзяо Тонг в Шанхае, Китай, возглавляет группу по разработке протеза руки нового поколения, который включает в себя биореалистичные элементы человеческой руки. Новый дизайн включает в себя податливую структуру руки, нервно-мышечную активацию, биомиметическое восприятие, а также алгоритмы для определения истинного двигательного намерения людей с ампутированными конечностями.
Появление бионических рук, особенно тех, которые контролируются собственными миоэлектрическими сигналами человека с ампутированной конечностью, считается революцией в биоинженерии, призванной помочь людям с ограниченными возможностями. По мере того, как протезы меняются на рынке уже более полувека, все больше и больше пользователей отказываются от них из-за трудностей с контролем и неощутимых захватов протезом руки. Восстановление чувства контакта с протезами рук в последние годы повысило уверенность людей с ампутированными конечностями в том, что они могут брать предметы и манипулировать ими так же, как и нормальной рукой. Однако управление современными протезами рук все еще примитивно по сравнению с человеческой рукой. Профессор Нин Лан из Шанхайского университета Цзяо Тонг в Шанхае, Китай, возглавляет группу по разработке протеза руки нового поколения, который включает в себя биореалистичные элементы человеческой руки. Новый дизайн включает в себя податливую структуру руки, нервно-мышечную активацию, биомиметическое восприятие, а также алгоритмы для определения истинного двигательного намерения людей с ампутированными конечностями. Это первая попытка воссоздать основные атрибуты человеческой руки в конструкции протеза руки.
Это первая попытка воссоздать основные атрибуты человеческой руки в конструкции протеза руки.
Работа финансируется за счет ключевого национального гранта Министерства науки и технологий Китая на исследования и разработки в 2017 году. эмулировать реалистичные свойства нервно-мышечного контроля для функциональной электрической стимуляции парализованных мышц. Это исследование началось с создания модели нейронной сети для прогнозирования мышечной силы и траектории конечностей при электрической стимуляции. Вскоре работа была продвинута, чтобы ответить на основные вопросы о роли спинномозговых рефлекторных цепей в регуляции нейромеханики мышц. Хотя физиологические исследования показали, что мышцы демонстрируют неуклюжий контроль силы по сравнению с робототехникой, но физиологи считали, что вязкоупругие свойства мышц полезны для точного контроля силы и / или положения с неожиданным возмущением.
Основываясь на податливости нервно-мышечной системы, была предложена теория управления точкой равновесия (ТР) как способ упростить управление несколькими мышцами, количество степеней свободы которых превышает количество степеней свободы, необходимых для управления движениями конечностей в соответствии с ньютоновской механикой. Но вскоре контроль ВП оказался в ловушке вопроса о том, как быстрое движение может быть выполнено нервно-мышечной системой. Чтобы преодолеть это ограничение теории ВП, центральная нейромоторная система должна дать команду на быстрое смещение траектории равновесия и нисходящий управляющий импульсный сигнал для выполнения быстрого движения. Вычислительная модель, основанная на теории EP, иллюстрирует оптимальный способ программирования этих центральных нисходящих команд. Позже большая часть усилий была направлена на создание физиологически реалистичных общих моделей мышц, веретен и рефлекторных цепей, которые могли бы лучше имитировать физиологические функции нервно-мышечных рефлексов. Несмотря на успех, эти модели требовали огромных вычислительных ресурсов для моделирования и оптимизации. Это было бы невозможно для реализации в режиме реального времени в управлении движением. Свет в конце туннеля появился с появлением нейроморфных чипов для быстрых вычислений, которые могут позволить вычислять модель нервно-мышечного рефлекса в реальном времени.
Но вскоре контроль ВП оказался в ловушке вопроса о том, как быстрое движение может быть выполнено нервно-мышечной системой. Чтобы преодолеть это ограничение теории ВП, центральная нейромоторная система должна дать команду на быстрое смещение траектории равновесия и нисходящий управляющий импульсный сигнал для выполнения быстрого движения. Вычислительная модель, основанная на теории EP, иллюстрирует оптимальный способ программирования этих центральных нисходящих команд. Позже большая часть усилий была направлена на создание физиологически реалистичных общих моделей мышц, веретен и рефлекторных цепей, которые могли бы лучше имитировать физиологические функции нервно-мышечных рефлексов. Несмотря на успех, эти модели требовали огромных вычислительных ресурсов для моделирования и оптимизации. Это было бы невозможно для реализации в режиме реального времени в управлении движением. Свет в конце туннеля появился с появлением нейроморфных чипов для быстрых вычислений, которые могут позволить вычислять модель нервно-мышечного рефлекса в реальном времени. Включив нейроморфную модель нервно-мышечного рефлекса в управление протезом, мы доказали возможность восстановления процесса нервно-мышечного рефлекса в режиме реального времени при управлении сухожилием руки.
Включив нейроморфную модель нервно-мышечного рефлекса в управление протезом, мы доказали возможность восстановления процесса нервно-мышечного рефлекса в режиме реального времени при управлении сухожилием руки.
Другим важным аспектом биореалистичного протеза руки является сенсорное осознание части людей с ампутированными конечностями при захвате предметов. Недавние исследования разработали множество способов обеспечения сенсорной обратной связи для людей с ампутированными конечностями на основе инвазивных или неинвазивных нейронных интерфейсов. Инвазивные технологии могут быть лучше, чтобы обеспечить более естественный сенсорный афферент для людей с ампутированными конечностями. Тем не менее, мы предложили и оценили новый, неинвазивный способ доставки естественной сенсорной информации людям с ампутированными конечностями, основанный на явлении, называемом вызванным тактильным ощущением (ETS). Кроме того, с помощью магнитоэнцефалографии (МЭГ) мы обнаружили, что контактная информация, специфичная для пальцев, передавалась через регенерированный афферентный путь непосредственно в соответствующие репрезентативные области пальцев в первичной соматосенсорной коре (SI), вызывая ощущение потери руки. Это важный шаг вперед, чтобы перевести эту неинвазивную технологию сенсорной обратной связи в коммерческий протез руки на рынке.
Это важный шаг вперед, чтобы перевести эту неинвазивную технологию сенсорной обратной связи в коммерческий протез руки на рынке.
Ампутация конечности нарушает как эфферентные, так и афферентные нервные связи между центральной и периферической нервными системами. Что еще более важно, нервно-мышечный рефлекторный процесс, остаточный или интактный, исключается при управлении протезным устройством, оставляя устройство под управлением жестких двигателей в лучшем случае без обратной связи. Таким образом, восстановления эфферентной и афферентной связи недостаточно для того, чтобы устройство вело себя как человеческая рука. Для приведения в действие также должен быть восстановлен нервно-мышечный рефлекторный процесс. Но это было невозможно в современных коммерческих протезах рук, потому что нет мышечных приводов. Наше исследование открыло новый путь к достижению управления нервно-мышечными рефлексами протеза руки путем оценки модели нервно-мышечных рефлексов в режиме реального времени с помощью высокоскоростных нейроморфных аппаратных средств. Модель содержит физиологически реалистичные компоненты мышцы, веретена, спайкового пула мотонейронов и моносинаптического рефлекторного пути. Когда нейроморфная модель соединена с внешним двигателем, мышечная сила, вычисляемая моделью, может генерироваться, чтобы тянуть пальцы протеза руки через сухожилие, таким образом закрывая или открывая руку для захвата или отпускания. Осуществимость была продемонстрирована в исследовании проверки концепции Luo et al. и Ниу и др. Предварительные данные свидетельствуют о том, что схватывание хрупких предметов может быть достигнуто с помощью протеза руки с контролем нервно-мышечных рефлексов на основе модели. Мы находимся в процессе дальнейшей оценки способности протеза руки, приводимого в действие моделью, для деликатных захватов, которые могут быть невозможны с существующими коммерческими устройствами.
Модель содержит физиологически реалистичные компоненты мышцы, веретена, спайкового пула мотонейронов и моносинаптического рефлекторного пути. Когда нейроморфная модель соединена с внешним двигателем, мышечная сила, вычисляемая моделью, может генерироваться, чтобы тянуть пальцы протеза руки через сухожилие, таким образом закрывая или открывая руку для захвата или отпускания. Осуществимость была продемонстрирована в исследовании проверки концепции Luo et al. и Ниу и др. Предварительные данные свидетельствуют о том, что схватывание хрупких предметов может быть достигнуто с помощью протеза руки с контролем нервно-мышечных рефлексов на основе модели. Мы находимся в процессе дальнейшей оценки способности протеза руки, приводимого в действие моделью, для деликатных захватов, которые могут быть невозможны с существующими коммерческими устройствами.
Необходимость восстановления нервно-мышечного рефлекторного процесса на протезе руки может быть связана с необходимостью максимально приблизить двигательное поведение протеза к поведению руки человека, чтобы сенсомоторная система ампутантов адаптировалась к внешнему устройству . Это один из важных аспектов нейронной совместимости внешнего устройства. Несовместимое устройство может привести к снижению функциональности или отторжению из-за плохого соответствия между основной сенсомоторной системой и подчиненным протезным устройством. Это объясняет, почему многие люди с ампутированными конечностями отказываются от протеза руки после некоторого времени использования. Таким образом, мы считаем, что восстановление нервно-мышечного рефлекторного процесса является многообещающим способом улучшения нервной совместимости протезных устройств, тем самым преобразуя функции, а также повышая приемлемость для людей с ампутированными конечностями.
Это один из важных аспектов нейронной совместимости внешнего устройства. Несовместимое устройство может привести к снижению функциональности или отторжению из-за плохого соответствия между основной сенсомоторной системой и подчиненным протезным устройством. Это объясняет, почему многие люди с ампутированными конечностями отказываются от протеза руки после некоторого времени использования. Таким образом, мы считаем, что восстановление нервно-мышечного рефлекторного процесса является многообещающим способом улучшения нервной совместимости протезных устройств, тем самым преобразуя функции, а также повышая приемлемость для людей с ампутированными конечностями.
Тег: Наука о здоровье
Источник: https://spj.sciencemag.org/journals/research/2021/4675326/
Биореалистичное управление протезом руки увеличивает функциональные возможности людей с ампутацией
Введение
Потеря верхних конечностей препятствует способности лиц с ампутацией выполнять повседневные действия. Ожидается, что протезы рук восстановят утраченные функции рук, исходя из предположения, что протез будет воспроизводить те же двигательные последствия, что и обычная рука при выполнении задачи (Light et al., 2002). Тем не менее, высокий процент людей с ампутацией склонен отказываться от миоэлектрических протезов рук из-за трудностей с контролем (Atkins et al., 19).96; Биддис и Чау, 2007 г.; МакФарланд и др., 2010). Функциональность современных протезов рук все еще сильно уступает ловкости рук человека. В частности, большая проблема возникает при управлении протезами для взаимодействия с деформируемыми или хрустящими объектами реального мира. В таких случаях ожидается, что протез руки адаптирует свою податливость в соответствии с жесткостью объекта, как это делает человеческая рука (Balasubramanian and Santos, 2014; Zhang et al., 2021). Поэтому мы предположили, что необходимо реанимировать податливое свойство сенсомоторного контроля человека в протезах рук (Lan et al., 2021).
Ожидается, что протезы рук восстановят утраченные функции рук, исходя из предположения, что протез будет воспроизводить те же двигательные последствия, что и обычная рука при выполнении задачи (Light et al., 2002). Тем не менее, высокий процент людей с ампутацией склонен отказываться от миоэлектрических протезов рук из-за трудностей с контролем (Atkins et al., 19).96; Биддис и Чау, 2007 г.; МакФарланд и др., 2010). Функциональность современных протезов рук все еще сильно уступает ловкости рук человека. В частности, большая проблема возникает при управлении протезами для взаимодействия с деформируемыми или хрустящими объектами реального мира. В таких случаях ожидается, что протез руки адаптирует свою податливость в соответствии с жесткостью объекта, как это делает человеческая рука (Balasubramanian and Santos, 2014; Zhang et al., 2021). Поэтому мы предположили, что необходимо реанимировать податливое свойство сенсомоторного контроля человека в протезах рук (Lan et al., 2021).
Человеческая рука достигает точного контроля хвата посредством сенсомоторной системы с рядом физиологических процессов (Lemon, 2008). Моторное намерение осуществляется от рекрутирования спинальных мотонейронов (Henneman et al., 1965) до генерации мышечных сил для движения суставов (Bernstein, 1967; McNeill Alexander, 2002; Valero-Cuevas et al., 2007) и, наконец, формирования проприоцептивной обратной связи для информирования мозга о двигательных последствиях (Weiler et al., 2019; Prochazka, 2021). Возникающий подход к реанимации этих физиологических процессов фокусируется на разработке вычислительных моделей, которые фиксируют биологически реалистичные свойства сенсомоторной системы (Ходжкин и Хаксли, 19).52; Рэк и Вестбери, 1969; Заяц, 1989 год; Ижикевич, 2003; Милусник и др., 2006; Сонг и др., 2008 г.; Он и др., 2013; Ли и др., 2015). Ключевой шаг к достижению биореалистичного управления протезами рук в режиме реального времени заключается в реализации биореалистичных моделей в нейроморфных чипах, способных к вычислениям в реальном времени (Niu et al., 2014, 2017). Биореалистичное управление может позволить протезу соответствовать поведению сенсомоторной системы людей с ампутацией (Niu et al.
Моторное намерение осуществляется от рекрутирования спинальных мотонейронов (Henneman et al., 1965) до генерации мышечных сил для движения суставов (Bernstein, 1967; McNeill Alexander, 2002; Valero-Cuevas et al., 2007) и, наконец, формирования проприоцептивной обратной связи для информирования мозга о двигательных последствиях (Weiler et al., 2019; Prochazka, 2021). Возникающий подход к реанимации этих физиологических процессов фокусируется на разработке вычислительных моделей, которые фиксируют биологически реалистичные свойства сенсомоторной системы (Ходжкин и Хаксли, 19).52; Рэк и Вестбери, 1969; Заяц, 1989 год; Ижикевич, 2003; Милусник и др., 2006; Сонг и др., 2008 г.; Он и др., 2013; Ли и др., 2015). Ключевой шаг к достижению биореалистичного управления протезами рук в режиме реального времени заключается в реализации биореалистичных моделей в нейроморфных чипах, способных к вычислениям в реальном времени (Niu et al., 2014, 2017). Биореалистичное управление может позволить протезу соответствовать поведению сенсомоторной системы людей с ампутацией (Niu et al. , 2021; Zhang et al., 2021).
, 2021; Zhang et al., 2021).
В нашей недавней работе был разработан биореалистичный контроллер (BC) на основе модели, вдохновленный управлением нервно-мышечными рефлексами (NRC), с использованием нейроморфной технологии быстрых вычислений (Niu et al., 2021). В БК содержались физиологически реалистичные модели нервно-мышечного рефлекса, в том числе модель мышц типа Хилла (Hill, 1938), модель веретена (Mileusnic et al., 2006), пул альфа-мотонейронов Ижикевича (Ижикевич, 2003) и моносинаптическая модель. рефлекторная петля (Marsden et al., 1976; Hultborn, 2006). Была оценена способность компенсатора плавучести контролировать силу, что продемонстрировало потенциальную применимость для управления протезами (Luo et al., 2021). Кроме того, на виртуальной руке было обнаружено, что жесткость пальцев с помощью NRC можно автоматически регулировать в соответствии с жесткостью зажатой пружины (Zhang et al., 2021). Эти исследования установили, что КП обладает человеческими способностями к контролю силы и жесткости, которые являются фундаментальными качествами сенсомоторной системы человека (Солсбери и Крейг, 19). 82; Йоханссон и Вестлинг, 1988 г.; Картер и др., 1990; Эттема и Хуцзин, 1994).
Целью этого исследования было дальнейшее изучение того, в какой степени BC может помочь людям с ампутацией лучше выполнять функциональные задачи захвата. Стандартный тест коробки и блоков (BBT), тест мячей для гольфа (GBT) и тест картофельных чипсов (PCT) были проведены для оценки функциональных улучшений. Последние две задачи были более сложными и новыми для протезных задач. Мы предположили, что восстановление нервно-мышечного рефлекса может позволить протезной руке вести себя как человеческая рука, таким образом повышая нейромоторную совместимость и облегчая людям с ампутацией возможность контролировать тонкие захваты. Здесь производительность BC с NRC сравнивалась с базовым контроллером с пропорциональной линейной обратной связью (PLF) у людей с ампутацией. Полученные данные позволили нам понять, как различные факторы, такие как соблюдение требований контролера, сложность задачи и опыт миоконтроля, могут влиять на функциональные характеристики протезов рук.
Материалы и методы
Субъекты
В исследовании приняли участие одиннадцать человек с ампутацией предплечья (десять мужчин и одна женщина, возрастной диапазон: 29–62 года). Подробные описания участников приведены в Таблице 1. У субъектов не было неврологических расстройств в анамнезе. Это исследование было одобрено Комитетом по этике экспериментов на людях и животных Научно-исследовательского института Med-X Шанхайского университета Цзяо Тонг. Все участники дали письменное согласие перед присоединением к исследованию.
Таблица 1. Клинические данные лиц с ампутацией.
Контроллер биореализма на основе модели
BC на основе модели был разработан с использованием аппаратного обеспечения с программируемой сверхбольшой схемой (VLSC) (рис. 1; Niu et al., 2021). Нейроморфный чип интегрировал ключевые модели NRC, которые включали пул мотонейронов, скелетную мышцу и связанное с ней мышечное веретено. Сигнал электромиографии (ЭМГ) от остаточной мышцы человека с ампутацией был отфильтрован в альфа-моторную команду с помощью нелинейного байесовского алгоритма (Sanger, 2007). Команда «Альфа мотор» — это вход в ВС. Двигательная команда входит в биореалистичную рефлекторную петлю в виде возбуждающего постсинаптического тока (ВПСТ), который распространяется на несколько пулов мотонейронов с импульсами. Импульсные импульсы от мотонейронов впоследствии преобразуются в возбуждающий драйв в модели скелетных мышц типа Хилла. Модель мышц рассчитывает мышечную силу, которая в конечном итоге будет создана моментным двигателем. Информация об удлинении мышц отправляется обратно к модели мышечного веретена, которое впоследствии производит возбуждающие афференты, которые возвращаются к пулу мотонейронов. Для BC усиление рефлекса было установлено на уровне 10%, при этом изменение жесткости составляло около 10% от исходных значений с небольшим изменением длины мышечного пучка (Niu et al., 2021). Этого было достаточно, чтобы вызвать реалистичное рефлекторное поведение на руке трупа человека (Niu et al., 2017). Рефлекторное усиление контроллера можно модулировать, изменяя чувствительность мышечного веретена, которая может регулироваться гамма-фузимоторными входами (гамма-статическая и гамма-динамическая).
Рис. 1. Интегрированная система человека и протеза руки с биореалистичным контроллером. Остаточная сЭМГ человека с ампутацией декодируется в команду альфа-мотора, чтобы установить рассчитанную моделью силу для моментного двигателя. Крутящий момент двигателя тянет трос, создавая движения протеза руки. Проприоцептивная информация выводится из вращения моментного двигателя в качестве входных данных для биореалистичного шпинделя. Нейроморфная модель включала пул мотонейронов с 768 спайковыми нейронами, скелетную мышцу и мышечное веретено, проецирующее 128 спайковых афферентов Ia. Длина мышцы ( L_m ) и длина пучка (длина сократительного элемента, L ce ) являются ключевыми входными данными для модели мышц и модели веретена соответственно. Длина мышечно-сухожильной единицы ( L mtu ) относится к сумме L_m и длины сухожилия ( L_t ). L_m относится к сумме L ce и длины последовательного упругого элемента ( L и ). F_0 — активная сила мышц, когда скорость сокращения мышц равна нулю, F_1 — активная сила, когда скорость сокращения мышц максимальна ( V_m ). Модель веретена состоит из трех интрафузальных волокон (мешок1, мешок2 и ядерная цепь), он получает 3 входа ( L ce , γ d и γ s
7 90 стрельба (Ia).
S постоянная ( S = 0,156).
Модель мышц типа Хилла преобразует спайки альфа-мотонейронов в мышечную силу в зависимости от временной длины мышцы и скорости ее удлинения (Hill, 1938). Активная сила обусловлена сократительными элементами в мышце через актиновый и миозиновый храповой механизм. Активная сила была масштабирована по отношению к длине мышцы в модели мышцы. Модель типа Хилла использует приблизительные характеристики автономных механических компонентов во время мышечного сокращения, например, производство силы, вязкоупругость, внезапное расслабление и т. д. Спайковые нейроны реализованы в соответствии с моделью Ижикевича (Ижикевич, 2003), которая использует постсинаптический нейронный ток в качестве входных данных. и производит на выходе поезд с шипами. В BC 768 альфа-мотонейронов были разделены на шесть пулов шести различных размеров. Поскольку каждый пул мотонейронов содержал 128 нейронов, их EPSC были наложены на независимые случайные шумы, чтобы позволить 128 нейронам активироваться с одинаковой скоростью, но с разным временем. Количество мотонейронов определяли путем уравновешивания количества иннервации типичной мышцы млекопитающих (Buchthal and Schmalbruch, 19).80) и максимальное количество, разрешенное оборудованием (Niu et al., 2017).
Биореалистическая проприоцептивная обратная связь обеспечивается за счет реализации физиологически реалистичной модели мышечного веретена (Mileusnic et al., 2006). Модель веретена воспринимает информацию об удлинении мышц, а затем производит возбуждающие афференты, которые возвращаются к пулу мотонейронов. Основываясь на этой модели, мы эмулировали волокна bag1, bag2 и ядерной цепи в веретене, которое продуцировало афференты группы Ia и группы II в соответствии с его гамма-фузимоторными импульсами и состояниями мышц. Для обеспечения асинхронности пиковых импульсов от мышечного веретена к 128 импульсным афферентным импульсам были добавлены независимые случайные шумы. Затем все пиковые афференты возвращались к мотонейронам с афферентами группы Ia. Однако в петлю обратной связи были включены только афференты группы Ia, потому что связи из группы II не были так четко определены в моносинаптических схемах.
Базовый контроллер для сравнения
Как показано на рисунке 2, контроллер PLF использовался в качестве базового контроллера для сравнения с BC. Замкнутый контур управления был достигнут путем наложения команды альфа-двигателя и линейной обратной связи. Прирост обратной связи составил 10%. Линейная обратная связь преобразовывала изменение длины ведомого троса в команду двигателя с обратной связью, а изменение длины измерялось датчиком вращения на моментном двигателе. Выигрыш ветви прямой связи и ветви обратной связи был определен в нашем предыдущем исследовании (Luo et al., 2021). Пропорциональный контроль был выбран здесь в качестве базового контроллера, поскольку он использовался в коммерческих протезах (Farina et al. , 2014; Segil and Weir, 2014). Линейная обратная связь была добавлена для моделирования упрощенной версии проприоцептивной обратной связи в базовом контроллере. Это позволило оценить сравнительный эффект регуляции с обратной связью с биореалистичной проприоцепцией и без нее.
Рис. 2. Пропорциональный контроллер с линейной обратной связью (PLF). Он используется в качестве базового контроллера для целей сравнения.
Протез руки с тросовым приводом
Протез руки с тросовым приводом, разработанный в предыдущей работе (Niu et al., 2021), управлялся контроллером BC или PLF для выполнения задач захвата. Это не зрелый протез руки и не близкое к домашнему медицинскому устройству, а исследовательское устройство, которое сводит к минимуму затраты благодаря конструкции с недостаточным приводом и одним моментным двигателем (PD2-C42, Nanotec Electronic GmbH & Co. KG, Германия). Тросы крепились к валу двигателя. Двигатель создавал крутящий момент, вызывающий натяжение кабеля, в результате чего цифры закрывались одновременно в соответствии с синергетической картиной. Необработанные сигналы поверхностной ЭМГ регистрировались с частотой 1,962 Гц по системе Delsys (Trigno Wireless EMG System, Delsys Inc., США) от остаточного сокращения мышц у лиц с ампутацией. Рука была напечатана на 3D-принтере и собрана с использованием конструкции тросового привода с открытым исходным кодом (InMoov) (InMoov, 2012). Для всех участников была изготовлена универсальная протезная гильза, и протезную гильзу можно было отрегулировать с помощью адаптера предплечья в соответствии с длиной руки человека с ампутацией. Чтобы уменьшить нагрузку на участников с протезом руки, моментный двигатель был перемещен проксимально к локтю.
Проверка свойств контролера
Способность контролировать силу (Wen et al., 2020; Luo et al., 2021) и способность регулировать жесткость (Okuno et al., 2005; Zhang et al., 2021) имеют решающее значение для хватательных функций протез руки. Мы разработали тест на изменчивость силы и тест на свойства жесткости, чтобы продемонстрировать преимущества соответствующего управления для контроллеров с биологическими свойствами и без них.
Тест изменчивости силы
Изменчивость силы протеза руки с различными контроллерами была протестирована с помощью задачи нажатия пальцем. Указательный палец протеза руки активировали, чтобы надавить на датчик силы. Как показано на рис. 3, протез пальца изначально находился на высоте 1 см над датчиком силы (9).0076 Н = 1 см). Сначала протез руки был полностью разогнут. После этого контроллеру протеза были даны псевдослучайные альфа-команды, которые заставляли палец протеза двигаться до тех пор, пока кончик пальца не коснется датчика силы. Сила кончика пальца и угол пястно-фалангового сустава протеза пальца регистрировались в режиме реального времени.
Рис. 3. Экспериментальная установка для проверки изменчивости усилия для двух контроллеров. Сначала протез руки был полностью разогнут. Контроллеру подавались псевдослучайные альфа-команды, которые заставляли палец протеза двигаться до тех пор, пока кончик пальца не коснется датчика силы.
Проверка свойства жесткости
Как показано на рис. 4, мы разработали эксперимент для проверки диапазона регулировки жесткости протеза руки с различными контроллерами. В частности, контроллер протеза получил команду альфа-мотора, чтобы указательный палец переместился в указанное положение (выбранный жест). Мы использовали линейный двигатель, чтобы потянуть палец в выбранном жесте, чтобы переместиться на 1 см по горизонтали. Сопротивление (сила натяжения) пальца кабелю измерялась датчиком натяжения, закрепленным на валу линейного двигателя. Таким образом, жесткость пальца может быть рассчитана по зарегистрированному изменению силы и расстоянию движения пальца ( D = 1 см).
Рис. 4. Эксперимент по испытанию на жесткость. (A) Схема испытания на жесткость; (B) Платформа для проверки жесткости протеза руки. Контроллеру протеза была дана команда «шаг альфа», которая заставляла указательный палец перемещаться в указанное положение (выбранный жест). Линейный двигатель, чтобы тянуть палец в выбранном жесте для перемещения на 1 см по горизонтали наружу с помощью кевларовой струны. Сопротивление (сила натяжения) пальца струне измеряется датчиком силы, закрепленным на валу линейного двигателя. Жесткость пальца можно рассчитать по зарегистрированному изменению силы и расстоянию движения пальца.
Тест функциональной задачи
Для дальнейшей оценки и сравнения производительности и надежности BC в функциональных задачах участникам было предложено выполнить следующие три функциональных теста: (1) BBT, (2) GBT и (3) PCT . Три задачи представляли собой повышенную сложность и деликатность для протеза руки при имитации повседневной жизнедеятельности.
Тест на ящики и блоки
Первым заданием на схватывание был BBT (Mathiowetz et al., 1985), который требовал от участников переложить как можно больше блоков из одного ящика в другой за 1 минуту (рис. 5A, F). Этот тест был стандартным для переноса жестких предметов. В ББТ подсчитывалось количество квадратных блоков, которые испытуемые могли переместить из одной коробки в другую за 1 мин. Если бы два блока были подняты одновременно, они считались бы одним. Количество успешных переводов и количество падений регистрировались как показатели результата.
Рис. 5. Обзор экспериментальной установки. (A) Проверка коробок и блоков. (B) Испытание мячей для гольфа. D G обозначает диаметр мяча для гольфа, а D H обозначает диаметр отверстия в середине крышки. (C) Дизайн теста на картофельные чипсы. D P представляет собой расстояние между центром паза и центром накопительного бака. d и h обозначают соответственно диаметр дна и высоту накопительного бака. (D) Лица с ампутацией левой ноги должны переносить предметы слева направо. (E) Людям с правосторонней ампутацией предлагается переносить предметы справа налево. (F) Экспериментальная сцена в тесте Box and Blocks. (G) Экспериментальная сцена в тесте мячей для гольфа. (H) Экспериментальная сцена в тесте картофельных чипсов.
Тест мячей для гольфа
GBT требовал более стабильного захвата и точной передачи скользких предметов и был получен из BBT. Тест повторял BBT, за исключением того, что вместо стандартных деревянных мячей использовались мячи для гольфа, а крышка с круглым отверстием была установлена для закрытия коробки со стороны перегородки (рис. 5B, G). Отверстие расположено посередине крышки, а его диаметр ( D H ) в 1,5 раза больше размера мяча для гольфа ( D G = 42 мм). Вес мяча для гольфа составляет примерно 45 г. Участников просили перебросить как можно больше мячей для гольфа с одной стороны перегородки на другую через отверстие за 1 мин, и это засчитывалось как одно выполнение задания. Чтобы шарики для гольфа не катились в коробке, мы положили на дно коробки губку толщиной 1 см. Производительность измерялась количеством успешных передач и количеством падений во время 1-минутного теста, аналогичного BBT.
Тест на картофельные чипсы
Мы разработали новый тест, который заключается в сборе картофельных чипсов в повседневной жизни. РСТ требовал деликатного захвата и точного переноса хрупких предметов. Как показано на рисунке 5C, картофельные чипсы размещаются вертикально в специальной прорези, а емкость для хранения картофельных чипсов фиксируется сбоку прорези для размещения. Расстояние между центром прорези и центром накопительного бака ( D P = 27 см) равно расстоянию между центрами ящиков по обеим сторонам перегородки в ББТ. Диаметр резервуара для хранения составляет ~7 см, а высота ~21 см. Участникам было предложено как можно быстрее перенести картофельные чипсы из слота для размещения в резервуар для хранения, но не разбивая их в течение 1 минуты (рис. 5H). Производительность измерялась количеством успешных переводов, количеством падений и перерывов в 1-минутном тесте. Чтобы сохранить постоянство, в эксперименте равномерно использовались консервированные оригинальные картофельные чипсы Lay’s.
Экспериментальный протокол
Для оценки эффективности протезных контроллеров был разработан экспериментальный протокол, состоящий из двух частей. Сначала мы провели тесты свойств контроллера на протезе руки без участия человека.
Во-вторых, испытуемых проинструктировали манипулировать протезом руки с двумя контроллерами (BC, PLF) для выполнения ряда функциональных задач, которые были введены в порядке возрастания сложности: сначала задача BBT, затем задача GBT и, наконец, задача задача ПКТ. Людям с левой ампутацией было предложено переносить объекты слева направо (рис. 5D), а лицам с правосторонней ампутацией — справа налево (рис. 5E). Испытуемых знакомили с заданиями и приучали к контроллерам около 20 мин. Во время обучения участники были способны манипулировать протезом руки для хватательных задач. Во избежание утомления участникам давали 1 мин отдыха между тестами. Кроме того, между тремя заданиями был 10-минутный перерыв. Участники выполняли каждое задание с пятью повторениями для каждого контроллера. Для каждой задачи была принята блочная конструкция на основе контроллеров, т.е. блок 1 для БК и блок 2 для ПЛФ. Последовательность блоков и тесты внутри блока были рандомизированы. Весь функциональный тест длился около 2 часов.
Index of Difficulty of Task
The Index of Difficulty of Task ( I D T a s k ) was defined as the square root of the sum of the number of дропов и количество брейков, деленное на количество успешных передач. Уравнение расчета выглядит следующим образом:
IDTask=NDrop+NBreakNSuccess(1)
, где N Успех — среднее количество успешных переводов по всем предметам, N Drop — среднее количество бросков по всем предметам, N Break — среднее количество перерывов по всем предметам в каждом задача.
Показатели результатов
Показатели в тестах свойств контроллера
1. Изменчивость силы
Мы предположили, что минимизация изменчивости силы приравнивается к минимизации среднеквадратичного значения (RMS) F ′ (производная силы, FD ), которая была производной по времени от приложенной силы ( F ). Среднеквадратичное значение FD было рассчитано следующим образом (Flash and Hogan, 1985):
FDRMS=1T∑t=1t=T(F′(t))2(2)
где F D R M S 7 9 изменчивость приложенной силы, а T означает продолжительность действия силы.
2. Изменчивость угла шарнира
Мы предположили, что минимизация вариабельности суставного угла была приравнена к минимизации RMS J A ″ (вторая производная суставного угла, JAD ), которая была второй производной суставного угла по времени ( JA ) . Среднеквадратичное значение FD было рассчитано следующим образом (Flash and Hogan, 1985):
JADRMS=1T∑t=1t=T(JA″(t))2(3)
где J A D R M 7 С обозначали вариабельность суставного угла протеза пальца, а T — продолжительность.
3. Диапазон регулировки жесткости
Жесткость протеза пальца ( K жесткость ) можно рассчитать по изменению силы ( F C 902 перемещения пальца Д = 1см). Расчет был выражен следующим образом:
Kstiffness=FCD(4)
The stiffness adjustment range ( KAD stiffness ) was equal to the maximum stiffness ( K max ) minus the minimum stiffness ( K min ), as follows:
KADstiffness=Kmax-Kmin(5)
Показатели функциональных тестов
1. Количество успешных переводов ( N Успех )
Количество успешно переданных объектов (блоки/мячи для гольфа/картофельные чипсы) в течение 1-минутного теста использовалось как критерий результата.
2. Количество падений ( N Падение )
Количество брошенных предметов (блоков/мячей для гольфа/картофельных фишек) во время 1-минутного теста использовалось как критерий результата.
3. Количество перерывов ( N Перерыв )
Количество сломанных предметов (картофельных чипсов) во время 1-минутного теста использовалось как критерий результата.
4. Комплексная метрика производительности (CMP)
Комплексная метрика производительности участников определялась как количество успешных переводов ( N Успех ) минус количество падений ( N Падение ) и количество разрывов ( N Разрыв 7 9 мин. Рассчитывается следующим образом:
CMP=NSuccess-NDrop-NBreak(6)
5. Разница в производительности контроллера (DCP )
Процент разницы в производительности контроллеров BC и PLF определялся следующим образом:
DCP=CMPBC-CMPPLF|CMPPLF|×100%(7)
Статистический анализ
Однофакторный дисперсионный анализ повторных измерений (ANOVA) был выполнен для оценки эффекта между контроллерами для всех участников. Двусторонние повторные измерения ANOVA использовались для выявления влияния опыта контролера и миоконтроля на показатели результатов. Сравнения апостериорных с поправкой Бонферрони оценивали попарные различия между контроллерами или опытом миоконтроля. Обработку данных проводили с помощью MATLAB (R2014b, MathWorks Inc., Натик, Массачусетс, США). Все средние значения представлены в виде среднего значения ± стандартное отклонение (среднее значение ± стандартное отклонение). Весь статистический анализ был проведен с помощью R версии 4.1.0.
Результаты
Совместимые свойства контроллеров
Реакции силы и положения протеза руки на нажатие датчика силы показаны на рисунке 6A. Когда контроллеры получали альфа-команды, палец-протез начинал двигаться, сначала изменялся угол сустава ПФС, а затем палец-протез касался объекта, создавая силу. По мере того, как альфа-моторные команды менялись в режиме реального времени, изменялись также угол пястно-фалангового сустава и сила кончика пальца протеза руки. По сравнению с контролем PLF, изменения силы кончика пальца и угла пястно-фалангового сустава протеза руки с использованием BC были более постепенными. Вариабельность силы ( F D R M S ) of using BC was 49. 8% lower than that of PLF control, and the variability of MCP joint angle ( J A D R M S ) уменьшилась на 19,6%.
Рис. 6. (A) Силовые и позиционные реакции протеза руки с контроллерами BC и PLF, нажимающими датчик силы. (i) Сила кончика пальца протеза руки; (ii) угол пястно-фалангового сустава протеза руки; (iii) псевдослучайный ввод альфа-моторных команд. (B) Свойство жесткости контроллеров. Различные альфа-команды приводили к разной жесткости у двух контроллеров (PLF, BC). Диапазон регулировки жесткости протеза кисти с БК и ПДФ определяют с помощью возмущающей силы, приложенной к кончику пальца.
На рис. 6B показано, что искусственный палец может создавать различную жесткость с помощью различных альфа-моторных команд. При усреднении результатов по 10 измерениям жесткость протеза кисти с РМЖ варьировала в более широком диапазоне (55,6–447,9).Н/м), чем у PLF (44,7–363,0 Н/м). Compared to PLF, the stiffness adjustment range ( K A D s t i f f n e s s ) with BC улучшилось на 23,2%.
Результаты в тесте Box and Blocks
Выполнение 5 сеансов задания BBT 11 участниками показано на рисунке 7. Для каждого испытуемого количество успешно переданных блоков с BC было значительно больше, чем с PLF (рисунок 7A) . Но существенной разницы в количестве выпавших блоков не было (рис. 7В). У всех испытуемых BC значительно превосходил PLF (рис. 7A, B) со средним числом успешных переводов 18,45 ± 2,34 для BC против 15,42 ± 2,48 для PLF (9).0076 p < 0,001) и очень небольшое количество выпавших блоков по BC (0,16 ± 0,37) по сравнению с PLF (0,55 ± 0,69; p < 0,001).
Рисунок 7. Показатели эффективности участников BBT. (A) Количество успешно переданных блоков для каждого участника. (B) Количество выпавших блоков для каждого участника. (C,D) Средние результаты для показателей результатов в различных экспериментальных условиях (BC/PLF; EXP/NEXP). (E,F) Средние результаты для CMP и DCP в группах EXP и NEXP (* p < 0,05; ** p < 0,01; *** p < 0,001).
При сравнении показателей субъектов с миоконтролем с опытом (EXP) и без опыта (NEXP) в миоконтроле количество переданных блоков в группе EXP было значительно больше, чем в группе NEXP ( p < 0,001; рис. 7C), как и всеобъемлющая метрика производительности (CMP ББТ ; p <0,001), как показано на рисунке 7E. Но не было статистически значимой разницы в количестве выпавших блоков ( p = 0,459; рис. 7D). В обеих группах BC постоянно превосходил PLF, и опыт использования myocontrol действительно оказал значительное влияние на производительность контроллера в задаче BBT (рис. 7E). Однако разница в производительности контроллера (DCP B BT ) не была существенной между группами EXP и NEXP ( р = 0,085; Рисунок 7F).
Тест производительности в игре с мячами для гольфа
Результаты 5 сессий задания GBT для всех участников представлены на рисунке 8. Для каждого субъекта количество успешно переданных мячей для гольфа с BC было значительно больше, чем с PLF (рисунок 8A) . Кроме того, за исключением S09, не было существенной разницы в количестве выпавших блоков (рис. 8B). У всех испытуемых BC значительно превосходил PLF (рис. 8A, B) со средним числом успешных передач 16,53 ± 2,12 по BC против 12,9.1 ± 2,58 по PLF ( p <0,001) и небольшое количество выпавших мячей для гольфа по BC (0,60 ± 0,68) по сравнению с PLF (1,62 ± 1,06; p <0,001).
Рисунок 8. Показатели эффективности участников GBT. (A) Количество успешно переданных мячей для гольфа для каждого участника. (B) Количество выпавших мячей для гольфа для каждого участника. (C,D) Средние результаты для показателей результатов в различных экспериментальных условиях (BC/PLF; EXP/NEXP). (E,F) Средние результаты для CMP и DCP в группах EXP и NEXP (* p < 0,05; ** p < 0,01; *** p < 0,001).
Для результатов субъектов с EXP по сравнению с участниками с NEXP количество переданных мячей для гольфа в группе EXP было значительно больше, чем в группе NEXP ( p < 0,05; рис. 8C), как и CMP GBT ( p <0,05; фигура 8E). Но существенной разницы в количестве выпавших блоков не наблюдалось ( р = 0,051; Рисунок 8D). В обеих группах BC постоянно превосходил PLF, и опыт работы с myocontrol также значительно повлиял на производительность контроллера в задаче GBT (рис. 8E). Тем не менее, разница в производительности контроллера (DCP GBT ) не была существенной между группами EXP и NEXP ( p = 0,288; рис. 8F).
Производительность в тесте картофельных чипсов
За 5 сеансов задачи PCT производительность контроллера более изменчива, как показано на рис. 9. Для каждого субъекта количество успешно перенесенных картофельных чипсов с BC было значительно больше, чем с PLF (рис. 9A). Кроме того, не было существенной разницы в количестве упавших картофельных чипсов, за исключением S08 (рис. 9B). Но количество сломанных картофельных чипсов с BC было значительно меньше, чем с PLF (рис. 9C). У всех испытуемых BC снова значительно превосходил PLF (рис. 9A-C) со средним числом успешных передач 11,25 ± 1,95 для BC против 7,69 ± 2,43 для PLF (9).0076 p < 0,001), небольшое количество выпавших картофельных чипсов по БК (0,87 ± 0,84) по сравнению с PLF (1,85 ± 1,13; p < 0,001) и количество разбитых картофельных чипсов по БК (1,89 ± 1,03). ) по сравнению с PLF (4,11 ± 1,56; p < 0,001).
Рисунок 9. Показатели эффективности участников РСТ. (A) Количество успешно переданных чипсов для каждого участника. (B) Количество выпавших чипсов для каждого участника. (C) Количество битых чипсов для каждого участника. (D–F) Средние результаты для показателей результатов в различных экспериментальных условиях (BC/PLF; EXP/NEXP). (G,H) Средние результаты для CMP и DCP в группах EXP и NEXP (* p < 0,05; ** p < 0,01; *** p < 0,001).
При сравнении показателей участников с EXP по сравнению с участниками с NEXP количество переданных картофельных чипсов в группе EXP было значительно больше, чем в группе NEXP ( р < 0,001; фигура 9D), а также CMP PCT ( p <0,001; фигура 9G). Кроме того, количество упавших картофельных чипсов в группе EXP было значительно меньше, чем в группе NEXP ( p <0,05; рис. 9E), равно как и количество разбитых картофельных чипсов ( p <0,001; рис. 9F). В обеих группах BC постоянно превосходил PLF, и влияние опыта с myocontrol на производительность контроллера было значительным (рис. 9).ГРАММ). Но что интересно, разница в производительности контроллера (DCP PCT ) в группе EXP была значительно ниже, чем в группе NEXP ( p <0,01), как показано на рисунке 9H. Это говорит о том, что новые субъекты без какого-либо опыта миоконтроля (группа NEXP) могут быстрее адаптировать биореалистичный контроль, чтобы добиться большего улучшения результатов, чем группа EXP в задаче PCT.
Общий анализ производительности
Таким образом, производительность BC превышала производительность базового контроллера PLF в трех задачах различной сложности. На рис. 10А показано общее сравнение производительности контроллера в трех функциональных задачах для всех испытуемых на паутинном графике. чем больше веб-область, тем выше производительность. Это ясно показывает, что во всех 11 субъектах BC постоянно превосходил PLF. Среди испытуемых S01, S04, S05, S07 и S10 имели большие области производительности с каждым контроллером. S03, казалось, давал худшие результаты среди них. В целом, увеличение сложности задачи приводило к ухудшению показателя производительности (CMP) как в группах EXP, так и в группах NEXP испытуемых, управляющих двумя контроллерами (9).0076 р < 0,001; Фигуры 10В,С). Однако снижение CMP при BC было немного меньше по сравнению с PLF (рис. 10B, C). Чтобы различать производительность между BC и PLF, несоответствие производительности было определено в уравнении. 7, чтобы оценить увеличение CMP. Интересно, что повышение производительности, характеризуемое DCP, было больше в группе NEXP по сравнению с таковым в группе EXP (рис. 10D), что было особенно значимо для задачи ПКТ ( p <0,001; рис. 9H).
Рис. 10. (A) Обзор показателей производительности 11 участников с разными контроллерами (BC, PLF) в трех функциональных задачах. N BS , количество успешно переданных блоков; N BD , количество выпавших блоков; N GS , количество успешно переданных мячей для гольфа; N GD , количество выпавших мячей для гольфа; № CS , количество успешно переданных картофельных чипсов; N CD , количество выпавших картофельных чипсов; N CB , количество сломанных чипсов. В целях визуализации показатели неудовлетворительной производительности были нанесены на график с отрицательной шкалой, так что большее значение представляло лучшую производительность. На каждой оси указаны минимальные и максимальные значения. (B) Связь между CMP и индексом сложности задачи (ID Задание ) в группе EXP. (C) Связь между CMP и индексом сложности задачи в группе NEXP. (D) Связь между DCP и ID Задача в группах EXP и NEXP. k представляет наклон линейной регрессии между показателем результата и идентификатором задачи .
Обсуждение
Целью данного исследования является понимание того, насколько хорошо компенсатор плавучести с восстановленным нервно-мышечным рефлексом может помочь людям с ампутацией управлять протезом руки с тросовым приводом. Основное предположение подчеркивает роль восстановленного нервно-мышечного рефлекса в улучшении нервной двигательной совместимости и производительности захвата. Нейромоторная совместимость подразумевает два аспекта взаимодействия человека с протезом. Во-первых, протез должен иметь непрерывную непрерывность сигналов управления движением, несущих намерение движения от сенсомоторной системы человека; во-вторых, протез должен производить конгруэнтное двигательное действие, как это делает сенсомоторная система человека (Lan et al. , 2019).). Проблема контроля захвата активно обсуждалась в сообществе протезистов (Okuno et al., 2005; Kuiken, 2009; Clemente et al., 2016; Hahne et al., 2018; Zhuang et al., 2019; Ortiz-Catalan et al. ., 2020; Piazza et al., 2020; Wen et al., 2020; Gu et al., 2021). Однако концепция и важность нейромоторной совместимости только недавно были разработаны для управления протезом (Lan et al., 2021). Интуитивно нейромоторная совместимость означает, что чем больше протез руки ведет себя как человеческая рука, тем более эффективно люди с ампутацией могут управлять протезом руки. В псевдофизиологическом исследовании виртуальная рука с восстановленным NRC демонстрирует уступчивое поведение, подобное человеческому, с уникальным характером адаптации жесткости при захвате мягкого объекта (Zhang et al., 2021). Полученные здесь результаты дополнительно подтверждают телеологическую корреляцию между NRC и нейромоторной совместимостью в протезе руки.
Результаты показывают, что восстановленный нервно-мышечный рефлекс в протезе превосходит показатели людей с ампутацией в трех задачах. Участники, использующие BC, достигли среднего улучшения CMP на 23,6, 43,7 и 263,8% по сравнению с контроллером PLF в задачах BBT, GBT и PCT соответственно (рис. 10D). Заметно улучшенная производительность при BC объясняется восстановлением нервно-мышечного рефлекса. Нейроморфная модель восстанавливает нарушенный нейромеханический процесс в протезе руки, так что протез восстанавливает уникальную нелинейную биомеханику человеческой мышцы с реалистичными свойствами сила-длина и сила-скорость (Luo et al., 2021; Niu et al. ., 2021). Это приводит к желательному соответствию жесткости и вязкости протеза руки (Rack and Westbury, 19).69; Хоффер и Андреассен, 1981 г.; Чжан и др., 2021). Когда протез руки использует это свойство для захвата объектов, сила, действующая на целевой объект, становится более стабильной и менее подверженной случайным изменениям (рис. 6А). Вязкоупругость мышц дополнительно регулируется локальными рефлекторными цепями в спинном мозге, что обеспечивает более широкий диапазон приспособляемости к жесткости (Crago et al. , 1976; Hultborn, 2006). Таким образом, податливая конечность способна справляться с неожиданными нарушениями во время движения или усилия, так что сенсомоторной системе человека не нужно различать два контрольных состояния движения или усилия во время захвата (Hogan, 19).84; Хакен и др., 1985; Лан и др., 2019, 2021; Ян и др., 2019 г.; Чжан и др., 2021). Поведение, похожее на сенсомоторный контроль человека, облегчает когнитивную нагрузку на людей с ампутацией, чтобы компенсировать чуждое поведение протеза, тем самым улучшая производительность захвата, особенно в деликатных задачах, таких как ПКТ. Эти результаты обеспечивают убедительные доказательства гипотезы о том, что восстановление нервно-мышечного рефлекса может усилить нервно-двигательную совместимость между протезом и сенсомоторной системой, что, в свою очередь, увеличивает способность управлять протезом у людей с ампутацией.
Следует отметить, что по результатам испытаний свойств контроллера изменчивость усилия биореалистического управления была снижена на 49,8%, а биореалистическое управление достигло лучшего свойства податливости с более широким диапазоном регулировки жесткости на 23,2%, чем у управления PLF. Более плавная (менее изменчивая) сила и траектория сустава в ответ на случайную «альфа-команду» указывают на более устойчивое двигательное действие, менее подверженное нарушениям. Это особенно важно для тонкого захвата хрупких предметов. Идеальная цель контроля скованности — соответствовать жесткости захваченного объекта (Lee et al., 19).94; Чжан и др., 2021). Замечательной особенностью нервно-мышечной рефлекторной системы является способность регулировать ее жесткость для адаптации к условиям внешней нагрузки. Следовательно, больший диапазон регулировки жесткости указывает на повышенную способность податливого контроля, то есть он может захватывать объекты с большим диапазоном жесткости или мягкости. Таким образом, диапазон регулировки жесткости подразумевает возможность функциональной работы. Функциональные тесты показали, что BC постоянно превосходит базовый контроллер. Это напрямую связано с его более плавным контролем силы и лучшей способностью регулирования жесткости. Оба свойства способствуют более устойчивому захвату с меньшим проскальзыванием и более точному усилию, действующему на объекты, особенно при захвате более хрупких картофельных чипсов. По сравнению с контролем PLF биореалистичный контроль дал улучшение CMP на 263,8% в задаче PCT, что было намного выше, чем улучшение производительности в тестах свойств контроллера (рис. 6). Это говорит о том, что BC с восстановленным нервно-мышечным рефлексом сделал протез руки более совместимым с людьми с ампутацией, что может привести к дальнейшему улучшению хватательных задач.
Результаты показывают, что сложность задачи сильно влияет на производительность контроллера. Задача BBT является стандартной экспериментальной парадигмой, но GBT и PCT не встречаются в литературе (см. обзор в Приложении). Три функциональных задания расположены в порядке возрастания сложности. Мячи для гольфа и картофельные чипсы легко поскользнуться или сломаться (см. дополнительный фильм 1). Как показано на рисунках 10B, C, задание BBT имело самый высокий балл CMP, за которым следовала задача GBT, а задание PCT было самым сложным с самым низким баллом CMP. Отмечено, что при контроле PLF наблюдалась высокая частота отказов (скольжения или разрыва) (рис. 9).E, F), так что средний балл CMP для PCT был ниже нуля (рис. 10C). Но обнадеживает то, что улучшение производительности BC (DCP) постепенно увеличивалось по мере увеличения сложности задачи (рис. 9H, 10D). Это показало, что преимущество BC может быть более заметным в более сложных задачах. Это дает убедительные доказательства того, что восстановление нервно-мышечного рефлекса в протезе руки может приблизиться к функциональности руки человека.
Предыдущий опыт использования миоконтроля протеза может играть более тонкую роль в работе людей с ампутацией. Опытные испытуемые обычно лучше справлялись с каждым из контроллеров в трех задачах, чем новые испытуемые (рис. 7E, 9).0076 р < 0,001; Фигура 8Е, р < 0,05; Фигура 9G, p <0,001). Но при изучении повышения производительности контроллера у каждого субъекта данные выявили значительную разницу между группами EXP и NEXP (рис. 9H, p <0,01) для самой сложной задачи (PCT), но не было существенной разницы для двух других. задачи меньшей сложности (BBT и GBT). Противоречит интуиции тот факт, что испытуемые в группе NEXP демонстрировали большую тенденцию к улучшению результатов с помощью BC, чем в группе EXP. Другими словами, новые субъекты без какого-либо опыта миоконтроля могли адаптировать контроль BC быстрее, чем опытные субъекты. В задаче ПКТ зона допустимого усилия захвата мала. Поскольку BC может поддерживать меньшую изменчивость силы, чем PFL (рис. 6A), он может, следовательно, более успешно захватывать и перемещать хрупкие картофельные чипсы. Мы предполагаем, что субъекты, не имеющие опыта миоконтроля, быстрее учатся управлять устройством; в то время как опыт миоконтроля может помешать субъектам адаптировать BC, который требует изучения новой операции, отличной от их предыдущего опыта. При одинаковом количестве времени, отводимом всем испытуемым на ознакомление с новым протезом в начале эксперимента, предшествующий опыт может поставить этих испытуемых в невыгодное положение при обучении управлению новым устройством. Тем не менее, мы ожидаем, что адекватная подготовка перед использованием компенсатора плавучести позволит всем испытуемым успешно использовать компенсатор плавучести.
Стоит отметить, что перед испытаниями все испытуемые выражали сомнение в выполнении задания ПКТ. Однако после непродолжительного ознакомления они быстро освоили новый протез руки. Участники также могли обращаться с другими хрупкими предметами, такими как яйцо и виноград (см. Дополнительный фильм 1). В других исследованиях деликатное хватание обычно осуществлялось протезами рук с тактильной обратной связью (Tan et al., 2014; Micera et al., 2020; Ortiz-Catalan et al., 2020; Gu et al., 2021). Благодаря хорошей нейронно-моторной совместимости КП требовал от пользователя меньших когнитивных усилий, а его двигательное действие могло происходить с минимальной задержкой благодаря сверхскоростным вычислениям в реальном времени нейроморфного оборудования. Представленные здесь результаты обнадеживают в отношении эффективности, превосходства и адаптируемости КП для людей с потерей предплечья. Обзор литературы показывает, что производительность BC была лучше, чем у большинства протезов при стандартной задаче BBT (см. Таблицу A3). Хотя управление крутящим моментом может быть более подвержено шуму в сигналах sEMG, контроллеры BC и PLF продемонстрировали адекватное управление для моментного двигателя в этом исследовании. Следовательно, их способность сглаживать шумы в сигналах сЭМГ проявляется в их относительной эффективности в трех задачах. Каким образом контроль крутящего момента/силы можно сравнить с контролем скорости в обычном протезе руки, еще предстоит выяснить в будущих исследованиях.
Это исследование направлено на интеграцию биореалистичных моделей восстановления нервно-мышечного рефлекса и проверку осуществимости и эффективности технологии в практическом применении к протезам. В нескольких исследованиях были созданы различные модели мышц (Hill, 1938; Rack and Westbury, 1969; Woittiez et al., 1984; Zajac, 1989; Biewener et al., 2014), модели нейронов (Hodgkin and Huxley, 1952; Rosenblatt, 1958; Ижикевич, 2003; Binczak et al. , 2006; Hayati et al., 2016), и веретенообразные модели (Crowe, 19).68; Руджорд, 1970; Шаафсма и др., 1991; Лин и Краго, 2002 г.; Милусник и др., 2006). Среди моделей мышц модель типа Хилла является широко распространенной моделью мышц, в первую очередь из-за простоты вычислений. Что касается нейронной модели, модель Ижикевича представляет очень естественные паттерны срабатывания (всплесков) без большой потери биологического реализма по сравнению с известной моделью Ходжкина-Хаксли. Насколько нам известно, модель веретена, принятая в этом исследовании, является единственной доступной моделью, наиболее близкой к своему биологическому аналогу. Ограничением в этом исследовании является то, что только одна мышца в руке с тросом была задействована для сгибания, оставляя разгибание пассивно растянутым пружиной. В этой установке отсутствовал биологический реализм, согласно которому и сгибание, и разгибание должны приводиться в действие отдельно парой мышц-антагонистов. Текущий прототип предотвратил использование совместного сокращения мышц для увеличения жесткости системы, как это делают люди. Добавление мышцы-антагониста в BC позволило бы напрямую модулировать жесткость системы путем модуляции совместного сокращения антагонистов (Ajoudani et al., 2014). Кроме того, рефлекторное усиление контроллера также может быть изменено для модуляции жесткости контроллера путем настройки входных сигналов фузимотора в соответствии с моделью шпинделя 9.0076 через гамму статической или динамической активности. Хотя оценочные задачи, проведенные здесь, показали многообещающие преимущества проприоцептивного афферента в функциональных задачах хватания протезов рук, люди с ампутацией в основном полагались на зрительную обратную связь (Winges et al., 2003; Saunders and Knill, 2004), чтобы направлять движение и проявлять хватание. усилие протеза руки. В последующей работе необходимо внедрить тактильную обратную связь в протезы рук (Tan et al., 2014; George et al., 2019).; Золло и др., 2019; Бенсмайя и др., 2020 г.; Хао и др., 2020 г.; Микера и др., 2020 г.; Фарина и др., 2021 г.; Raspopovic et al. , 2021) для создания полностью биореалистичного протеза руки (Lan et al., 2021). Необходимы дальнейшие испытания в рамках более масштабного исследования с большим количеством пользователей, чтобы подтвердить долгосрочную надежность, устойчивость, воплощение и приемлемость в повседневной жизни.
Заявление о доступности данных
Необработанные данные, подтверждающие выводы этой статьи, будут предоставлены авторами без неоправданных оговорок.
Заявление об этике
Исследования с участием людей были рассмотрены и одобрены Комитетом по этике экспериментов на людях и животных Научно-исследовательского института Med-X Шанхайского университета Цзяо Тонг. Пациенты/участники предоставили письменное информированное согласие на участие в этом исследовании.
Вклад авторов
QL, CN и NL разработали экспериментальное исследование и проанализировали экспериментальные данные. QL провела эксперимент, подготовила рисунки и таблицы и набросала рукопись. C-HC оказала поддержку в настройке экспериментальной платформы. WL, XD и MH привлекли для этого исследования лиц с ампутацией. NL предложила аналитический метод и переработала рукопись. Все авторы внесли свой вклад в статью и одобрили представленную версию.
Финансирование
Эта работа была частично поддержана ключевым грантом Фонда естественных наук Китая (№ 81630050), грантом Национальной ключевой программы исследований и разработок Китая Министерства науки и технологий Китая (№ 2017YFA0701103) и грант Комиссии по науке и технологиям муниципалитета Шанхая (№ 20DZ2220400).
Конфликт интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Примечание издателя
Все утверждения, изложенные в этой статье, принадлежат исключительно авторам и не обязательно представляют претензии их дочерних организаций или издателя, редакторов и рецензентов. Любой продукт, который может быть оценен в этой статье, или претензии, которые могут быть сделаны его производителем, не гарантируются и не поддерживаются издателем.
Дополнительный материал
Дополнительный материал к этой статье можно найти в Интернете по адресу: https://www.frontiersin.org/articles/10.3389/fnins.2021.783505/full#supplementary-material
Сокращения
NRC, контроль нервно-мышечных рефлексов; BBT, тест коробки и блоков; GBT, тест мячей для гольфа; ПКТ, тест на картофельные чипсы; BC, биореалистичный контроллер; PLF, пропорциональная линейная обратная связь; VLSC, очень крупномасштабная схема; ЭМГ, электромиография; MCP, пястно-фаланговый; JAD RMS , среднеквадратичное значение второй производной угла сустава; KAD жесткость , диапазон регулировки жесткости; EXP, опыт миоконтроля; NEXP, отсутствие опыта миоконтроля; CMP, всеобъемлющий показатель производительности; DCP, разница в производительности контроллера; ID задание , индекс сложности задания; MVC, максимальное произвольное сокращение; N Success , количество успешных передач; N Капля , количество капель; N Перерыв , количество разрывов; FD RMS , среднеквадратическая производная силы; ANOVA, дисперсионный анализ.
Ссылки
Аджудани, А., Годфри, С.Б., Бьянки, М., Каталано, М.Г., Гриоли, Г., Цагаракис, Н., и др. (2014). Изучение телеимпеданса и тактильной обратной связи для интуитивного управления мягкой рукой Pisa/IIT. IEEE Trans. Тактильные 7, 203-215. doi: 10.1109/TOH.2014.2309142
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Аткинс Д. Дж., Херд Д. С. Ю. и Донован У. Х. (1996). Эпидемиологический обзор лиц с потерей верхних конечностей и сообщаемые ими исследовательские приоритеты. Дж. Простет. ортот. 8, 2–11. doi: 10.1097/00008526-199600810-00003
Полный текст CrossRef | Google Scholar
Balasubramanian, R., and Santos, VJ (eds) (2014). Человеческая рука как источник вдохновения для разработки рук роботов. Cham: Springer International Publishing, doi: 10.1007/978-3-319-03017-3
CrossRef Полный текст | Google Scholar
Бенсмайя, С. Дж., Тайлер, Д. Дж., и Микера, С. (2020). Восстановление сенсорной информации с помощью бионических рук. Нац. Биомед. англ. 1–13. doi: 10.1038/s41551-020-00630-8
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Бернштейн, Н. А. (1967). Координация и регуляция движений. Headington Hill Hall: PergamonPress Ltd.
Google Scholar
Biddiss, EA, and Chau, TT (2007). Использование и отказ от протезов верхних конечностей: обзор последних 25 лет. Протез. ортот. Междунар. 31, 236–257. doi: 10.1080/03093640600994581
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Biewener, A.A., Wakeling, J.M., Lee, S.S., and Arnold, A.S. (2014). Валидация моделей мышц холмистого типа в отношении нервно-мышечного рекрутирования и характеристик сила-скорость: прогнозирование закономерностей in vivo мышечная сила. Интегр. Сравнить биол. 54, 1072–1083. doi: 10.1093/icb/icu070
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Бинчак С., Жакир С., Бильбо Ж. -М., Казанцев В.Б., Некоркин В.И. (2006). Экспериментальное исследование электрических нейронов фитцхью–нагумо с измененной возбудимостью. Нейронная сеть. 19, 684–693. doi: 10.1016/j.neunet.2005.07.011
PubMed Abstract | Полный текст перекрестной ссылки | Академия Google
Бухталь Ф. и Шмальбрух Х. (1980). Двигательная единица мышц млекопитающих. Физиол. Ред. 60, 90–142. doi: 10.1152/physrev.1980.60.1.90
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Картер Р. Р., Краго П. Е. и Кит М. В. (1990). Регуляция жесткости рефлекторным действием в нормальной руке человека. J. Нейрофизиол. 64, 105–118. doi: 10.1152/jn.1990.64.1.105
PubMed Abstract | Полный текст перекрестной ссылки | Академия Google
Клементе Ф., Д’Алонзо М., Контроцци М., Эдин Б. Б. и Сиприани К. (2016). Неинвазивная дискретная во времени обратная связь о контакте с объектом и его отпускании улучшает контроль захвата миоэлектрических трансрадиальных протезов с замкнутым контуром. IEEE Trans. Нейронная система. Реабилит. англ. 24, 1314–1322. doi: 10.1109/TNSRE.2015.2500586
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Crago, P.E., Houk, JC, and Hasan, Z. (1976). Регуляторные действия рефлекса растяжения человека. J. Нейрофизиол. 39, 925–935. doi: 10.1152/jn.1976.39.5.925
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Кроу А. (1968). Механическая модель мышечного веретена млекопитающих. Дж. Теорет. биол. 21, 21–41. doi: 10.1016/0022-5193(68)
-X
Полный текст CrossRef | Google Scholar
Дромерик А.В., Шабовски К.Н., Холли Р.Дж., Монро Б., Маркотик А. и Лам П.С. (2008). Влияние тренировок на протезирование верхних конечностей и моторное обучение: исследование одного случая. Арх. физ. Мед. Реабилит. 89, 1199–1204. doi: 10.1016/j.apmr.2007.09.058
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Ettema, GJC, and Huijing, PA (1994). Ригидность скелетных мышц при статических и динамических сокращениях. Дж. Биомех. 27, 1361–1368. doi: 10.1016/0021-9290(94)
-0
Полный текст CrossRef | Google Scholar
Фарина Д., Цзян Н., Ребаум Х., Холобар А., Грайманн Б., Дитль Х. и др. (2014). Извлечение нейронной информации из поверхностной ЭМГ для управления протезами верхних конечностей: новые возможности и проблемы. IEEE Trans. Нейронная система. Реабилит. англ. 22, 797–809. doi: 10.1109/TNSRE.2014.2305111
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Farina, D., Vujaklija, I., Brånemark, R., Bull, A. M. J., Dietl, H., Graimann, B., et al. (2021). К более производительным бионическим конечностям для более широкого клинического применения. Нац. Биомед. англ. 1–13. doi: 10.1038/s41551-021-00732-x
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Флэш Т. и Хоган Н. (1985). Координация движений рук: экспериментально подтвержденная математическая модель. J. Neurosci. 5, 1688–1703 гг. doi: 10.1523/JNEUROSCI.05-07-01688.1985
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Джордж Дж. А., Клюгер Д. Т., Дэвис Т. С., Венделкен С. М., Окорокова Е. В., Хе К. и др. (2019). Биомиметическая сенсорная обратная связь посредством стимуляции периферических нервов улучшает ловкость бионической руки. Науч. Робот. 4, eaax2352. doi: 10.1126/scirobotics.aax2352
Реферат PubMed | Полный текст перекрестной ссылки | Google Scholar
Godfrey, S.B., Zhao, K.D., Theuer, A., Catalano, M.G., Bianchi, M., Breighner, R., et al. (2018). Мягкая рука: функциональная оценка нового, гибкого и надежного миоэлектрического протеза. PLoS One 13:e0205653. doi: 10.1371/journal.pone.0205653
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Гу Г., Чжан Н., Сюй Х., Линь С., Ю Ю., Чай Г. и др. (2021). Мягкая нейропротезная рука, обеспечивающая одновременный миоэлектрический контроль и тактильную обратную связь. Нац. Биомед. англ. 1–10. doi: 10.1038/s41551-021-00767-0
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Хане, Дж. М., Швайсфурт, М. А., Коппе, М., и Фарина, Д. (2018). Одновременное управление несколькими функциями бионических протезов рук: производительность и надежность для конечных пользователей. Науч. Робот. 3:eaat3630. doi: 10.1126/scirobotics.aat3630
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Хакен Х., Келсо Дж. А. С. и Банц Х. (1985). Теоретическая модель фазовых переходов в движениях рук человека. Биол. киберн. 51, 347–356. doi: 10.1007/BF00336922
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Хао М., Чоу С.-Х., Чжан Дж., Ян Ф., Цао С., Инь П. и др. (2020). Восстановление пальцевой сенсорной обратной связи для трансрадиальных ампутированных конечностей с помощью неинвазивных вызванных тактильных ощущений. IEEE Open J. Eng. Мед. биол. 1, 98–107. doi: 10.1109/OJEMB.2020.2981566
CrossRef Full Text | Академия Google
Хаяти М., Нури М., Эбботт Д. и Хагири С. (2016). Цифровая безумножительная реализация двухпарной биологической модели нейрона Заднего болота-Роуза. IEEE Trans. Цепи Сист. II Express Briefs 63, 463–467. doi: 10.1109/TCSII.2015.2505258
Полный текст CrossRef | Google Scholar
He, X., Du, Y-F., and Lan, N. (2013). Оценка вклада прямой и обратной связи в жесткость и изменчивость рук при многосуставном управлении руками. IEEE Trans. Нейронная система. Реабилит. англ. 21, 634–647. doi: 10.1109/TNSRE.2012.2234479
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Хеберт, Дж. С., и Левик, Дж. (2012). Отчет о модифицированном тесте коробок и блоков с захватом движения для измерения функции протеза. J. Реабилитация. Рез. Дев. 49:1163. doi: 10.1682/JRRD.2011.10.0207
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Хеннеман Э. , Сомьен Г. и Карпентер Д. О. (1965). Функциональное значение размера клеток в мотонейронах спинного мозга. J. Нейрофизиол. 28, 560–580. doi: 10.1152/jn.1965.28.3.560
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Хилл, А. В. (1938). Теплота укорочения и динамические константы мышц. Проц. Р. Соц. Лонд. сер. Б биол. науч. 60:126. doi: 10.1098/rspb.1938.0050
Полный текст CrossRef | Google Scholar
Ходжкин А.Л. и Хаксли А.Ф. (1952). Количественное описание мембранного тока и его приложение к проводимости и возбуждению в нерве. J. Physiol. 117, 500–544. doi: 10.1113/jphysiol.1952.sp004764
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Хоффер Дж. А. и Андреассен С. (1981). Регуляция жесткости камбаловидной мышцы у премаммилярных кошек: внутренние и рефлекторные компоненты. J. Нейрофизиол. 45, 267–285. doi: 10.1152/jn.1981.45.2.267
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Хоган, Н. (1984). Адаптивный контроль механического импеданса путем коактивации мышц-антагонистов. IEEE Transactions на автоматическом управлении 29, 681–690. doi: 10.1109/TAC.1984.1103644
Полный текст CrossRef | Google Scholar
Халтборн, Х. (2006). Спинномозговые рефлексы, механизмы и концепции: от ECCLES до Лундберга и далее. Прог. Нейробиол. 78, 215–232. doi: 10.1016/j.pneurobio.2006.04.001
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Ижикевич Э. М. (2003). Простая модель спайковых нейронов. IEEE Trans. Нейронная сеть. 14, 1569–1572. doi: 10.1109/TNN.2003.820440
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Йоханссон, Р. С., и Вестлинг, Г. (1988). Координированные изометрические мышечные команды адекватно и ошибочно запрограммированы на вес во время подъема с точным хватом. Экспл. Мозг Res. 71, 59–71. doi: 10.1007/BF00247522
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Kuiken, TA (2009). Целенаправленная реиннервация мышц для миоэлектрического контроля многофункциональных искусственных рук в режиме реального времени. ДЖАМА 301:619. doi: 10.1001/jama.2009.116
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Куикен, Т. А., Миллер, Л. А., Тернер, К., и Харгроув, Л. Дж. (2016). Сравнение управления распознаванием образов и прямого управления трансрадиальным протезом с несколькими степенями свободы. IEEE J. Перевод. англ. Здоровье Мед. 4, 1–8. doi: 10.1109/JTEHM.2016.2616123
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Лан Н., Хао М., Ню С. М., Цуй Х., Ван Ю., Чжан Т. и др. (2021). Протез руки следующего поколения: от биомиметики к биореалистичности. Исследования 2021:4675326. doi: 10.34133/2021/4675326
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Лан, Н., Ниу, К.М., Хао, М., Чоу, К.-Х., и Дай, К. (2019). Достижение нейронной совместимости с сенсомоторным контролем человека в протезных и терапевтических устройствах. IEEE Trans. Мед. Робот. Бион. 1, 122–134. doi: 10.1109/TMRB.2019.2930356
Полный текст CrossRef | Google Scholar
InMoov (2012). Робот в натуральную величину, напечатанный на 3D-принтере с открытым исходным кодом. Доступно в Интернете по адресу: http://inmoov.fr/ (по состоянию на январь 2012 г.).
Google Scholar
Lee, Y.-T., Choi, H.-R., Chung, W.-K., and Youm, Y. (1994). Контроль жесткости соединенной руки робота с сухожильным приводом. Система управления IEEE. Маг. 14, 10–19. doi: 10.1109/37.320882
Полный текст CrossRef | Google Scholar
Лемон, Р. Н. (2008). Нисходящие пути в моторной регуляции. год. Преподобный Нейроски. 31, 195–218. doi: 10.1146/annurev.neuro.31.060407.125547
Реферат PubMed | Полный текст перекрестной ссылки | Google Scholar
Лензи, Т., Липси, Дж., и Сенсингер, Дж. В. (2016). Рука RIC — небольшой антропоморфный чресплечевой протез. IEEE/ASME Trans. Мехатрон. 21, 2660–2671. doi: 10.1109/TMECH.2016.2596104
CrossRef Full Text | Google Scholar
Li, S., Zhuang, C., Hao, M., He, X., Marquez, J.C., Niu, C.M., et al. (2015). Координированный альфа- и гамма-контроль мышц и веретен в движении и позе. Фронт. вычисл. Неврологи. 9:122. doi: 10.3389/fncom.2015.00122
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Light, CM, Chappell, PH, and Kyberd, PJ (2002). Создание стандартизированного инструмента клинической оценки патологической и протезной функции кисти: нормативные данные, надежность и валидность. Арх. физ. Мед. Реабилит. 83, 776–783. doi: 10.1053/apmr.2002.32737
PubMed Abstract | Полный текст перекрестной ссылки | Академия Google
Лин, К.-К. К. и Краго, ЧП (2002). Структурная модель мышечного веретена. Энн. Биомед. англ. 30, 68–83. doi: 10.1114/1.1433488
Полный текст CrossRef | Google Scholar
Луо К., Ню К. М., Лю Дж., Чжоу К., Хао М. и Лан Н. (2021). Оценка основанного на модели биомиметического контроля силы протезного пальца для захвата. Trans, Neural Syst. Реабилит. англ. 29, 1723–1733 гг. doi: 10.1109/TNSRE.2021.3106304
PubMed Abstract | Полный текст перекрестной ссылки | Академия Google
Марсден, К.Д., Мертон, П.А., и Мортон, Х.Б. (1976). Рефлекс растяжения и сервопривод в различных мышцах человека. J. Physiol. 259, 531–560. doi: 10.1113/jphysiol.1976.sp011481
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Матиовец В., Фолланд Г., Кашман Н. и Вебер К. (1985). Взрослые нормы на коробку и блочный тест ловкости рук. утра. Дж. Оккуп. тер. 39, 386–391.
Google Scholar
Макфарланд Л.В., Винклер С.Л.Х., Хайнеманн А.В., Джонс М. и Эскенази А. (2010). Односторонняя потеря верхней конечности: удовлетворение и использование протезов у ветеранов и военнослужащих из Вьетнама и конфликтов OIF/OEF. Дж. Реабилитация. Рез. Дев. 47:299. doi: 10.1682/JRRD.2009.03.0027
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Макнил Александр, Р. (2002). Эластичность сухожилий и функция мышц. Сравните. Биохим. Физиол. Часть А Мол. интегр. Физиол. 133, 1001–1011. doi: 10.1016/S1095-6433(02)00143-5
Полный текст CrossRef | Google Scholar
Микера С., Калео М., Чисари К., Хаммель Ф. К. и Педрокки А. (2020). Передовые нейротехнологии для восстановления двигательной функции. Нейрон 105, 604–620. doi: 10.1016/j.neuron.2020.01.039
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Милеусник, М. П., Браун, И. Э., Лан, Н., и Леб, Г. Э. (2006). Математические модели проприорецепторов. я. контроль и трансдукция в мышечном веретене. J. Нейрофизиол. 96, 1772–1788 гг. doi: 10.1152/jn.00868.2005
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Ниу К.М., Джалаледдини К., Сон В.Дж., Рокамора Дж., Сангер Т. Д. и Валеро-Куэвас Ф.Дж. (2017). Нейроморфизм встречается с нейромеханикой, часть I: методология и реализация. J. Нейронная инженерия. 14:025001. doi: 10.1088/1741-2552/aa593c
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Ниу К.М., Луо К., Чоу К., Лю Дж., Хао М. и Лан Н. (2021). Нейроморфная модель рефлекса для человекоподобного управления протезом руки в реальном времени. Энн. Биомед. англ. 49, 673–688. doi: 10.1007/s10439-020-02596-9
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Ниу, К.М., Нандьяла, С.К., и Сангер, Т.Д. (2014). Эмулированное мышечное веретено и пиковые афференты подтверждают, что нейроморфное оборудование СБИС можно использовать в качестве испытательного стенда для сенсомоторной функции и заболеваний. Фронт. вычисл. Неврологи. 8:141. doi: 10.3389/fncom.2014.00141
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Окуно Р., Ёсида М. и Аказава К. (2005). Податливый захват в миоэлектрическом протезе руки. IEEE англ. Мед. биол. Маг. 24, 48–56. doi: 10.1109/MEMB.2005.1463396
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Ортис-Каталан М., Мастину Э., Сассу П., Ацманн О. и Бранемарк Р. (2020). Автономные нейромышечно-скелетные протезы руки. Н. англ. Дж. Мед. 382, 1732–1738. doi: 10.1056/NEJMoa1
- 7
- title={Протез руки нового поколения: от биомиметики к биореалистичности},
автор = {Нин Лан, Манчжао Хао, Чуаньсинь Минос Ню, Хэ Цуй, Юй Ван, Тин Чжан, Пэн Фан и Чжи-хун Чжоу},
журнал={Исследование},
год = {2021},
объем = {2021}
}- N. Lan, M. Hao, Chih-hong Chou
- Опубликовано 24 марта 2021 г.
- Медицина, биология, психология
- Исследования
Интеграция протеза руки для людей с ампутированными конечностями с грандиозной нейросовместимостью и нейронных инженеров более полувека. Имитация анатомической структуры или внешнего вида человеческой руки не приводит к улучшению нейронной связи с сенсомоторной системой людей с ампутированными конечностями. Функции современных протезов рук не соответствуют ловкости руки человека, в первую очередь из-за отсутствия сенсорной осведомленности и податливого срабатывания.
В последнее время прогресс в восстановлении… Биореалистичное управление протезом руки увеличивает функциональные возможности людей с ампутацией
Результаты подтверждают гипотезу о том, что восстановление нервно-мышечного рефлекса в протезе руки может улучшить нейромоторную совместимость с сенсомоторной системой человека, что позволяет людям с ампутацией выполнять тонкие захваты, которые не тестировались с обычными протезами рук.
Антагонистический контроль тросового протеза руки с нейроморфной моделью мышечного рефлекса
- Anran Xie, Chih-hong Chou, Qi Luo, Zhuozhi Zhang, N. Lan
Биология, медицина
2022 44-я ежегодная международная конференция IEEE Engineering in Medicine & Biology Society (EMBC)
9 2
Антагонистическое управление тросовым протезом руки с биореалистичными свойствами мышечного рефлекса с биореалистичным свойством мышц создано для применения у лиц с ампутацией.
Реабилитация моторики рук для пострадавших на социальном роботе
- Франсиско Гомес-Доносо, Феликс Эскалона, Надя Насри, М. Касорла
Медицина, психология
- 2021
Терапевты и пациенты чувствовали больше мотивации при использовании плана реабилитации, что улучшило приверженность к реабилитационному плану, что улучшило приверженность к реабилитационному плану. и терапевты смогли оказать услуги большему количеству пациентов, чем когда они использовали свою традиционную методологию.
Проводящий пористый MXene для бионических, носимых и точных датчиков движения жестов
- Shengshun Duan, Yucheng Lin, Baoping Wang
Материаловедение
Исследования
- 2021
Продемонстрировано, что ультраконформные датчики, основанные на сенсорах с контролируемой щелевой структурой чувствительность, быстрое время отклика/релаксации, широкий диапазон и долговечность, что делает эти конформные датчики движения многообещающими кандидатами для совместного мониторинга движений в носимой электронике и робототехнике.
От параметрического представления к динамической системе: изменение взглядов на моторную кору в управлении движением
В этом обзоре оглядывается назад история репрезентативных и динамических перспектив и оценивается их теоретическое влияние, будущее направление и потенциальное применение в мозго-машинном анализе. интерфейсы.
Тактильный датчик вне кожи как интерфейс между протезами и биологическими системами
- Shengshun Duan, Hui Yang, Jun Wu
Биология
Наноэнергия
- 2022
Емкостной датчик, сочетающий датчик приближения и давления для точного захвата протеза руки
- Игорь Валь Данилов
Искусство
Труды конференции Future Technologies (FTC) 2021, том 3
- 2021
ПОКАЗАНЫ 1–10 ИЗ 29 ССЫЛОК
СОРТИРОВАТЬ ПОРелевантности Наиболее влиятельные документыНедавность
Нейроморфная модель рефлекса для человекоподобного управления протезом руки в реальном времени нейроморфная модель спинального нервно-мышечного рефлекса.
Замкнутый протез руки с одновременной внутринейронной тактильной и позиционной обратной связью
- E. D’Anna, G. Valle, S. Micera
Биология, психология
Наука Робототехника
- 2019
Это исследование показывает, что сенсорное замещение, основанное на внутринейронной стимуляции, может обеспечивать обратную связь по положению в реальном времени и в сочетании с соматотопической тактильной обратной связью, а также прокладывает путь к более сложной двунаправленной бионические конечности, передающие более богатые мультимодальные ощущения.
Восстановление специфичной для пальцев сенсорной обратной связи у пациентов с трансрадиальной ампутацией посредством неинвазивной вызванной тактильной чувствительности
- M. Hao, Chih-hong Chou, N. Lan
Медицина, психология
IEEE Open Journal of Engineering in Medicine and Biology
- 2020
позволяет эффективно передавать сенсорную информацию о пальцах людям с трансрадиальной ампутацией.
Высокоселективный биомиметический гибкий тактильный датчик для нейропротезирования
- Yue Li, Z. Cao, Ting Zhang
Материаловедение, машиностроение
Исследования
- 2020
Биомиметический гибкий емкостной датчик для выборочного обнаружения статических сил и сил трения скольжения, а также специально разработанная схема кодирования сигнала были разработаны для преобразования емкостного сигнала в бионический импульсный сигнал. модулируется приложенной силой трения скольжения.
Сухожильный протез руки с континуальной структурой*
- Yadong Yan, Yu Wang, Xiangqian Chen, Chao Shi, Jiazheng Yu, Chang Cheng
Engineering
2020 42-я ежегодная международная конференция IEEE Engineering in Medicine & Biology Society (EMBC)
- 2020
Подвижность руки TN достаточна для выполнения аккордов колонны благодаря способности отводить пальцев, а способность манипулировать повседневными предметами руки TN была проверена на основе таксономии рук.
Восстановление сенсорной информации с помощью бионических рук.
Описаны неинвазивные и инвазивные технологии передачи искусственной сенсорной обратной связи через бионические руки, оценены долгосрочные перспективы технологий.
Мышцы и сухожилия: свойства, модели, масштабирование и применение в биомеханике и управлении двигателем.
- F. Zajac
Биология, инженерия
Критические обзоры в области биомедицинской инженерии имеет только один параметр — отношение длины сухожилия в покое к длине мышечного волокна в покое.
Стратегия классификации движений на основе комбинации сигналов сЭМГ-ЭЭГ для пациентов с ампутированными конечностями
- Xiangxin Li, O. Samuel, Xu Zhang, Hui Wang, Peng Fang, Guanglin Li
Информатика, медицина
Журнал of NeuroEngineering and Rehabilitation
- 2016
Продемонстрирована возможность объединения сигналов сЭМГ и ЭЭГ для повышения точности классификации движений у пациентов с ампутированными конечностями выше локтя, что может улучшить контрольные характеристики многофункциональных миоэлектрических протезов в клиническом применении.
Протезирование верхних конечностей: критические факторы отказа от устройства
- E. Biddiss, T. Chau
Медицина, психология
Американский журнал физической медицины и реабилитации
- 1007
- 1007
- рекомендуется информационное обслуживание, а также активное вовлечение клиентов в подбор протезов, отвечающих их конкретным целям и потребностям.
Схемы для умелого захвата и дотягивания.
Было продемонстрировано, что интернейроны спинного мозга, опосредующие нисходящие команды для достижения и захвата, составляют отдельные и отличные популяции от тех, которые участвуют в передвижении и позе.
Протез руки может двигаться вместе с вашими мыслями • tectales • маркировка медицинских технологий
У Кевена Уолгамотта было хорошее «предчувствие» по поводу того, чтобы поднять яйцо, не раздавив его. То, что кажется простым почти всем остальным, может оказаться геркулесовой задачей для Уолгамотта, потерявшего левую руку и часть руки в результате поражения электрическим током 17 лет назад.
Но он тестировал прототип высокотехнологичного протеза руки с пальцами, которые не только могут двигаться, они могут двигаться вместе с его мыслями. А благодаря группе инженеров-биомедиков из Университета Юты он «почувствовал» яйцо достаточно хорошо, чтобы его мозг мог приказать протезу руки не сжимать его слишком сильно.Это потому, что команда, возглавляемая доцентом кафедры биомедицинской инженерии U Грегори Кларком, разработала способ «руки LUKE» (названной так в честь роботизированной руки, которую Люк Скайуокер получил в «Империи наносит ответный удар»), чтобы имитировать способ человеческая рука чувствует предметы, посылая соответствующие сигналы в мозг. «Мы изменили способ отправки этой информации в мозг, чтобы она соответствовала человеческому телу. И, сопоставив человеческое тело, мы смогли увидеть улучшенные преимущества», — говорит Джордж. «Мы делаем более биологически реалистичные сигналы».
Это означает, что человек с ампутированной рукой, носящий протез руки, может чувствовать прикосновение к чему-то мягкому или твердому, лучше понимать, как это взять, и выполнять деликатные задачи, которые в противном случае были бы невозможны со стандартным протезом с металлическими крючками или когтями вместо рук.
«Это почти довело меня до слез», — говорит Уолгамотт о первом использовании LUKE Arm во время клинических испытаний в 2017 году. «Это было действительно потрясающе. Никогда бы не подумал, что снова смогу чувствовать эту руку».Уолгамотт, агент по недвижимости из Уэст-Вэлли-Сити, штат Юта, и один из семи испытуемых в университете, смог сорвать виноград, не раздавив его, поднять яйцо, не разбив его, и держать руку жены с ощущением в пальцы как у здорового человека. «Одним из первых вещей, которые он хотел сделать, было надеть обручальное кольцо. Это трудно сделать одной рукой», — говорит Кларк. «Это было очень трогательно». Эти вещи достигаются посредством сложной серии математических расчетов и моделирования.
Рука LUKE
Кевен Уолгамотт тестирует новый протез руки, который может двигаться вместе с его мыслями.
Источник: Центр нейронных интерфейсов Университета Юты
LUKE Arm разрабатывался около 15 лет. Сама рука состоит в основном из металлических моторов и деталей с прозрачной силиконовой «кожей» на руке.
Он питается от внешнего аккумулятора и подключается к компьютеру. Он был разработан DEKA Research & Development Corp., компанией из Нью-Гэмпшира, основанной изобретателем Segway Дином Кейменом.Тем временем команда U разрабатывает систему, которая позволяет протезу руки подключаться к нервам владельца, которые подобны биологическим проводам, посылающим руке сигналы для движения. Это происходит благодаря изобретению почетного профессора U биомедицинской инженерии Ричарда А. Норманна, названного Utah Slanted Electrode Array. Массив представляет собой пучок из 100 микроэлектродов и проводов, которые имплантированы в нервы человека с ампутированными конечностями в области предплечья и подключены к компьютеру вне тела. Массив интерпретирует сигналы от еще оставшихся нервов руки, а компьютер переводит их в цифровые сигналы, которые заставляют руку двигаться.
Но это работает и в обратную сторону. Для выполнения таких задач, как поднятие предметов, требуется нечто большее, чем просто мозг, сообщающий руке о движении.
Протез руки также должен научиться «чувствовать» объект, чтобы знать, какое давление нужно оказывать, потому что вы не можете понять это, просто взглянув на него.Во-первых, в руке протеза есть датчики, которые посылают сигналы в нервы через массив, чтобы имитировать ощущение, которое рука испытывает, когда что-то берет. Но не менее важно то, как эти сигналы отправляются. Это включает в себя понимание того, как ваш мозг справляется с переходами в информации, когда он впервые касается чего-либо. При первом контакте с объектом волна импульсов проходит по нервам к мозгу, а затем стихает. Воссоздание этого было большим шагом. «Просто дать ощущение — это большое дело, но то, как вы посылаете эту информацию, также имеет решающее значение, и если вы сделаете ее более биологически реалистичной, мозг лучше ее поймет, и производительность этого ощущения также будет лучше», — говорит Кларк. .
Для этого команда Кларка использовала математические расчеты вместе с записанными импульсами руки примата, чтобы создать приблизительную модель того, как люди получают эти различные образцы сигналов.
Затем эта модель была внедрена в систему LUKE Arm.Помимо создания прототипа руки LUKE с осязанием, общая команда уже разрабатывает полностью портативную версию, которую не нужно подключать к компьютеру вне тела. Вместо этого все будет подключено по беспроводной сети, что даст владельцу полную свободу.
Кларк говорит, что массив наклонных электродов из штата Юта также способен посылать в мозг сигналы не только осязания, такие как боль и температура, хотя статья в основном касается осязания. И хотя их работа в настоящее время касается только людей с ампутированными конечностями, которые потеряли конечности ниже локтя, где расположены мышцы, обеспечивающие движение руки, Кларк говорит, что их исследование может быть применено и к тем, кто потерял руки выше локтя.
Кларк надеется, что в 2020 или 2021 году трое испытуемых смогут забрать руку домой для использования в ожидании одобрения федеральных регулирующих органов.
Создание протеза руки, который может чувствовать
Программа DARPA HAPTIX направлена на разработку протеза руки, который не уступает по возможностям оригиналу
11 мин чтения
Майк МакГрегор , Игорь Спетич нащупывает чашу перед собой, засовывает в нее руку и берет за черенок вишню.
Он использует свою левую руку, которая состоит из его собственной плоти и крови. Однако его правая рука представляет собой пластмассово-металлический протез, возникший в результате несчастного случая на производстве. Спетик является добровольцем в нашем исследовании в Медицинском центре по делам ветеранов Луи Стоукса в Кливленде, и он годами использует это «миоэлектрическое» устройство, управляя им, сгибая мышцы правой руки. Протезы, типичные для людей с ампутированными конечностями, обеспечивают лишь грубый контроль. Пока мы смотрим, Спетич хватает вишню между большим и указательным пальцами, чтобы оторвать черенок. Вместо этого фрукт лопается между его пальцами.Затем мы с коллегами включаем тактильную систему, которую мы и наши партнеры разрабатывали в
Лаборатория функционального нейронного интерфейса в Университете Кейс Вестерн Резерв, также в Кливленде. Ранее хирурги Дж. Роберт Андерсон и Майкл Кейт имплантировали электроды в правое предплечье Спетика, которые теперь контактируют с тремя нервами в 20 местах. Стимуляция различных нервных волокон вызывает реалистичные ощущения, которые Спетик воспринимает как исходящие от его отсутствующей руки: когда мы стимулируем одно место, он чувствует прикосновение к своей правой ладони; другое место вызывает ощущение в большом пальце и так далее.Чтобы проверить, дадут ли такие ощущения Спетику лучший контроль над его протезом руки, мы поместили тонкопленочные датчики силы в указательный, средний и большой пальцы устройства и использовали сигналы от этих датчиков для запуска соответствующей стимуляции нерва. Мы снова наблюдаем, как Спетич хватается за очередную вишенку. На этот раз его прикосновение нежное, когда он отрывает стебель, ничуть не повреждая плод.
В наших испытаниях он смог выполнить эту задачу в 93 процентах случаев, когда тактильная система включена, и только в 43 процентах случаев, когда тактильная система выключена. Более того, Спетич сообщает, что ему кажется, будто он хватает вишенку, а не просто использует инструмент, чтобы схватить ее.
Как только мы включаем стимуляцию, он говорит: «Это моя рука».Оборудование для реставрации: Игорь Спетич (стоит), потерявший правую руку в результате промышленной аварии, работает с автором Дастином Дж. Тайлером (сидит) над разработкой экспериментальной тактильной системы, которая позволяет Спетику ощущать ощущения в отсутствующей руке.
Майк МакГрегор
В конце концов, мы надеемся разработать протез, который будет так же эффективен, как и потерянная рука. Наша ближайшая цель — подобраться так близко, чтобы Спетик мог хоть на мгновение забыть, что он проиграл руку. На данный момент наша тактильная система находится в зачаточном состоянии и может использоваться только в лаборатории: у Спетика все еще есть провода, торчащие из его руки, которые подключаются к нашему компьютеру во время испытаний, что позволяет нам контролировать схемы стимуляции. Тем не менее, это первый случай, когда человек без руки может испытывать разнообразные реалистичные ощущения в течение более чем нескольких недель в отсутствующей конечности.
Сейчас мы работаем над полностью имплантируемой системой, которую, как мы надеемся, проведем через пять лет.Что даст добавление осязания к протезам? В настоящее время люди с протезами обычно могут использовать искусственные конечности только для задач, не требующих точности, таких как фиксация и удержание. Сенсорная обратная связь от нашей тактильной системы улучшит контроль и уверенность, что позволит более широко использовать протез для решения множества мелких задач повседневной жизни.
Кроме того, мы надеемся восстановить одну из самых основных форм человеческого контакта. Представьте, каково это, потерять чувство осязания — прикосновение дает нам такое глубокое чувство связи с другими. Когда мы спрашиваем Спетика и других носителей протезов, как улучшить свои механические конечности, они обычно говорят, что хотят держать руку любимого человека и действительно чувствовать ее. Наша технология должна однажды позволить им достичь этой очень человеческой цели.
Всю свою карьеру я посвятил изучению брака между человеком и машиной.
Моя работа на стыке биомедицинской инженерии и нейронной инженерии побудила меня искать ответы на некоторые основные вопросы: как электронные схемы могут общаться с нервной системой таким образом, чтобы нервная система понимала? Как мы можем использовать эту способность, чтобы восстановить широкий спектр ощущений тому, кто потерял руку? И как можно использовать эту технологию для улучшения жизни других людей?За последние несколько десятилетий в этой области были достигнуты значительные успехи, в том числе более совершенное аппаратное обеспечение, которое можно имплантировать в мозг или тело, и более совершенное программное обеспечение, которое может понимать и имитировать естественный нейронный код. В этом коде электрические импульсы в нервной системе передают информацию между клетками мозга или по нейронам периферических нервов, которые тянутся по всему телу. Эти сигналы управляют исполнительными механизмами тела, такими как мышцы, и обеспечивают обратную связь в виде ощущений, положения конечностей, мышечной силы и т.
д.Вставляя электроды непосредственно в мышцы или оборачивая их вокруг нервов, контролирующих сокращение мышц, мы можем посылать этим электродам команды, которые примерно повторяют сигналы, связанные, например, с движением руки, вставанием или поднятием ноги. Более поздние усилия направлены на понимание и восстановление сенсорной системы за счет финансирования из
Программа Департамента по делам ветеранов США и Агентства перспективных исследовательских проектов Министерства обороны США «Проприоцепция рук и сенсорные интерфейсы» (HAPTIX).Проводной: Рентгеновский снимок показывает хирургически имплантированные электродные манжеты в предплечье Спетика и провода в его плече, которые подключаются к внешнему компьютеру. Изображение: Tyler Lab/The Cleveland VA Medical Center
Наша работа над тактильными интерфейсами подпадает под обе эти новые программы, но вместо этого основное внимание уделяется восстановлению сенсорных сигналов от отсутствующей конечности к мозгу.
Разработка такого интерфейса сложна, потому что он должен обеспечивать точные схемы стимуляции периферических нервов человека, не повреждая или иным образом не изменяя нервы. Он также должен надежно функционировать в течение многих лет в суровых условиях тела.Существует несколько подходов к проектированию имплантированного интерфейса. Наименее инвазивным является встраивание электродов в мышцу рядом с точкой, где целевой нерв входит в эту мышцу. Такие системы использовались для восстановления функций после травмы спинного мозга, инсульта и других форм неврологических повреждений. Тело хорошо переносит электроды, и их хирургическая замена относительно проста. Однако когда электроды должны активировать мышцу, часто требуется ток до 20 миллиампер, примерно столько же, сколько вы получаете, когда шаркаете по ковру и получаете «электрический шок»; даже в этом случае мышца не всегда полностью активируется.
Наиболее инвазивный подход предполагает введение электродов глубоко в нерв.
Размещение стимулирующих контактов так близко к аксонам-мишеням — частям нервных клеток, которые проводят электрические импульсы — означает, что требуется меньший ток и что можно выборочно активировать очень небольшие группы аксонов. Но тело имеет тенденцию отвергать инородные материалы, помещенные в защитные слои его нервов. В экспериментах на животных нормальный воспалительный процесс часто выталкивает эти электроды из нерва.Где-то между этими двумя подходами находятся системы, которые окружают нерв и создают электрические контакты на поверхности нерва. Простые системы, которые стимулируют только один участок на одном нерве, коммерчески доступны для
лечат эпилепсию и помогают пациентам, перенесшим инсульт, говорить и глотать. Более сложные, многоканальные версии надежно использовались в течение почти десяти лет в клинических испытаниях для восстановления функции верхних и нижних конечностей после травмы спинного мозга.С конца 19В 90-х годах моя группа работала над такими опоясывающими электродами, также известными как нервные манжеты.
Одной из первых проблем, с которой мы столкнулись, было то, как увеличить доступ к нерву, фактически не проникая в него. Небольшая площадь поверхности и цилиндрическая форма традиционной электродной манжеты не подходили для этой задачи. Поэтому мы
сплющил нервную манжету так, чтобы она соответствовала продолговатому поперечному сечению нерва.Запонки для манжет: Эти уплощенные электродные манжеты, разработанные группой авторов, охватывают нерв и позволяют передавать сигналы по 8 каналам. Фото: Tyler Lab/The Cleveland VA Medical Center
В 2014 году мы представили последнюю версию уплощенной манжеты с восемью контактными точками, каждая из которых подключена к отдельному каналу стимуляции. На сегодняшний день мы имплантировали нашу восьмиканальную манжету нескольким субъектам. Спетик, доброволец, собирающий вишни, имеет манжеты с плоскими электродами, надетые вокруг срединного и локтевого нервов, двух из трех основных нервов в его руке.
У него традиционный круговой электрод, размещенный вокруг лучевого нерва. Это обеспечивает в общей сложности 20 каналов стимуляции в его предплечье: по восемь на срединном и локтевом нервах и четыре на лучевом нерве.В первый раз, когда Spetic тестировала нашу систему, мы не знали, действительно ли какой-либо из каналов будет транслироваться в разные ощущения или в разные места. В тревоге мы включили его и активировали контакт на срединном нерве Спетика. «Ух ты!» он сказал. «Это кончик моего большого пальца. Это первый раз, когда я почувствовал свою руку после травмы». Это был один из тех моментов, ради которых живет исследователь.
Дальнейшее тестирование показало, что наши 20 точек стимуляции вызывали ощущения в 19 местах на отсутствующей руке Спетика, включая точки на левой и правой сторонах его ладони, на тыльной стороне кисти, на запястье, большом пальце и кончиках пальцев.
Следующее поколение нашей манжеты будет иметь в четыре раза больше контактов. Чем больше каналов, тем более избирательно мы сможем получить доступ к небольшим группам аксонов и обеспечить более полезный диапазон ощущений.
В дополнение к тактильным ощущениям мы хотели бы создавать такие ощущения, как температура, положение суставов (известное как проприоцепция) и даже боль. Несмотря на свой негативный оттенок, боль является важным защитным механизмом. Во время наших тестов один канал стимуляции действительно вызывал болезненные ощущения. В конце концов, мы хотели бы включить такие защитные механизмы.На данный момент мы изучаем другие каналы и продолжаем работать со Спетиком, которому имплантировали систему с мая 2012 года. Она до сих пор работает хорошо. По его словам, когда система отключается, он даже не осознает, что в его тело что-то имплантировано.
Из Конечно, вызвать основное ощущение — это одно; контролировать то, как это ощущение ощущается, — это другое. Это аналогично разговору: вам нужно генерировать звук, но чтобы вас поняли, этот звук должен исходить в виде четких паттернов, которые можно интерпретировать как язык. В наших первых опытах мы возбуждали нервы регулярными импульсами постоянной силы.
Эта регулярная стимуляция привела к ощущению покалывания, называемому парестезией, — ощущению покалывания затекшей ноги. Итак, мы генерировали звук, но не речь.Такие электрические импульсы не являются частью репертуара нервной системы, когда она работает должным образом: единственный раз, когда мы видим их в мозгу, это во время аномальной активности, такой как эпилептический припадок. Мы думаем, что такая стимуляция заставляет группу из нескольких сотен нейронов срабатывать вместе, создавая необычный сигнал, который мозг интерпретирует как общее ощущение покалывания.
Фото: Майк МакГрегор
Полный контроль: Включив тактильные ощущения в протезе руки, Спетик может выполнять такие деликатные задачи, как сбор винограда, хватание лепестков цветка и отвинчивание крышки. «Это моя рука, — говорит он.
1 / 3
В наших следующих экспериментах мы варьировали структуру электрических импульсов, которые мы посылали по нервам в мозг.
Мы пытались изменить синхронизацию импульсов и чередовать последовательность с парами импульсов. Ни один из этих тестов не дал существенной разницы. И поскольку было так много переменных, оказалось трудным и трудоемким понять, как изменение схемы импульсов влияет на то, что Спетик чувствовал.Чтобы продолжить эксперимент, я проверил многие шаблоны на себе. Используя клинически доступную неинвазивную систему стимуляции нервов, член команды поместил электроды на мой палец, где они могли активировать поверхностный нерв, а затем я заставил своих студентов «жужжать» меня различными узорами. Мы обнаружили, что изменение силы пульса волнообразно, то увеличиваясь, то уменьшаясь примерно за одну секунду, меняло ощущение от покалывания до более естественного чувства давления — мне казалось, что что-то сжимает мой палец.
После этого мы были готовы опробовать шаблон на Spetic. Когда началась стимуляция, он на мгновение выглядел сбитым с толку, а затем положил пальцы оставшейся руки на шею.
«Я больше не чувствую покалывания», — сказал он. «Это пульсирующее давление, как будто я положил пальцы на шею и почувствовал пульс». С небольшой корректировкой мы смогли убрать пульсацию, и он сообщил о естественном прикосновении, «как будто кто-то только что положил палец на мою руку».Мы думаем, что более слабые импульсы активируют меньше нейронов в нерве, тогда как более сильные импульсы вызывают возбуждение большего их числа. Различия в частоте возбуждения различных нейронов являются частью нейронного кода, который понимает мозг. Если применяемый нами паттерн напоминает уже известный мозгу паттерн, он интерпретирует ощущение в соответствии со своим опытом: по сути, мозг говорит: «Хорошо, это прикосновение».
Сейчас мы пытаемся понять, как более сложные паттерны могут привести к более тонкому восприятию ощущений. До сих пор Спетик сообщал о ощущениях текстур, которые он описал как липучки и наждачную бумагу, а также о ощущениях движения, трепета и постукивания объектов по его коже.
Более того, Спетик может манипулировать тонкими и хрупкими предметами так, как раньше он был не в состоянии. Ему больше не нужно полагаться только на зрение, чтобы знать, как работает его протез. И он гораздо увереннее пользуется протезом, когда у него есть чувствительность, чем когда ее нет.Так как же все эти знания помогут другим? Работая с нашими партнерами из Medtronic и Ливерморской национальной лаборатории Лоуренса, мы создаем полностью имплантируемую систему стимуляции в сочетании с усовершенствованным антропоморфным тактильным протезом. Проект направлен на создание работающего устройства в течение трех лет, чтобы оно было готово к клиническим испытаниям к последнему году нашего пятилетнего контракта.
Прикосновение его мастера: группа авторов работает над полностью имплантируемой тактильной системой, которая может быть готова к клиническим испытаниям в течение пяти лет.
..»> Фото: Майк МакГрегор
Создание сложного устройства для нервной стимуляции, которое действительно работает за пределами лаборатории, будет непростой задачей. Протез должен будет постоянно контролировать сотни тактильных и позиционных датчиков на протезе и передавать эту информацию обратно на имплантированный стимулятор, который затем должен преобразовать эти данные в нейронный код, который будет применяться к нервам в руке. В то же время наша система будет определять намерение пользователя переместить протез, записывая активность до 16 мышц культи. Эта информация будет декодирована, передана из тела по беспроводной сети и преобразована в команды моторного привода, которые будут перемещать протез. Всего в системе будет 96 каналов стимуляции и 16 каналов записи, которые необходимо скоординировать, чтобы создать движение и ощущение. И вся эта деятельность должна осуществляться с минимальными временными задержками.
Совершенствуя нашу систему, мы пытаемся найти оптимальное количество контактов.
Если мы используем три плоских электродных манжеты, каждая из которых имеет 32 контакта, например, мы могли бы гипотетически обеспечить чувствительность в 96 точках на руке. Итак, сколько каналов нужно пользователю, чтобы иметь отличную функцию и ощущения? И как информация по этим каналам координируется и интерпретируется?Чтобы сделать автономное устройство, не зависящее от внешнего компьютера, нам потребуются миниатюрные процессоры, которые можно вставить в протез для связи с имплантатом и отправки стимуляции на манжеты электродов. Имплантированная электроника должна быть достаточно прочной, чтобы прослужить годы в человеческом теле, и должна иметь внутреннее питание, чтобы провода не торчали из кожи. Нам также нужно будет разработать протокол связи между протезом и имплантированным процессором.
Это сложная инженерная задача, но когда мы добьемся успеха, эта тактильная технология может принести пользу не только пользователям протезов. Такой интерфейс позволил бы людям прикасаться к вещам так, как это было невозможно раньше.
Представьте себе акушера, который чувствует сердцебиение плода, а не просто полагается на допплерографию. Представьте себе специалиста по обезвреживанию бомб, который ощупывает провода внутри бомбы, которой на самом деле управляет дистанционно управляемый робот. Представьте себе геолога, который ощущает вес и текстуру камня, находящегося за тысячи километров, или продавца, который пожимает руку новому покупателю в Твиттере.Такие сценарии могут стать реальностью в течение следующего десятилетия. Ощущение говорит нам, что является частью нас, а что нет. Распространяя ощущения на наши машины, мы расширим досягаемость человечества, даже если эта досягаемость будет такой же простой, как держать любимого человека за руку.
Эта статья появилась в печатном выпуске за май 2016 года под названием «Восстановление человеческого прикосновения».
Об авторе
Дастин Дж. Тайлер возглавляет лабораторию функциональных нейронных интерфейсов в Университете Кейс Вестерн Резерв в Кливленде, где он создает технологии и изучает новые, прямые способы взаимодействия человека с машинами.
Продолжайте читать…Показать меньше
Эта статья предназначена только для членов IEEE. Присоединяйтесь к IEEE, чтобы получить доступ к нашему полному архиву.Присоединяйтесь к крупнейшей в мире профессиональной организации, занимающейся инженерными и прикладными науками, и получите доступ ко всем статьям, подкастам и специальным отчетам Spectrum. Узнать больше →
Если вы уже являетесь членом IEEE, войдите в систему, чтобы продолжить чтение.
Членство включает в себя:
- Получите неограниченный доступ к контенту IEEE Spectrum
- Следите за любимыми темами, чтобы создать персонализированную ленту контента IEEE Spectrum
- Сохраняйте статьи Spectrum для последующего чтения
- Общайтесь с другими профессионалами в области технологий
- Создайте профессиональный профиль группа для совместного использования и совместной работы над проектами
- Знакомьтесь с событиями и мероприятиями IEEE
- Присоединяйтесь и участвуйте в дискуссиях
Будущее сердце обсерватории им.
Веры С. Рубин скоро отправится в Чили3 мин чтения
Камера LSST, Обсерватория Веры С. Рубин в Чили стоит на стенде в чистой комнате Bay Area.
Жаклин Рэмсиер Оррелл/Национальная ускорительная лаборатория SLAC
cameraCCDspaceastronomy
Самая большая в мире камера находится в неприметном промышленном здании на холмах над заливом Сан-Франциско.
Если все пойдет хорошо, эта камера когда-нибудь поместится в сердце будущей обсерватории Веры С. Рубин в Чили. В течение последних семи лет инженеры создавали камеру в чистой комнате Национальной ускорительной лаборатории SLAC в Менло-Парке, Калифорния. В мае 2023 года, если все пойдет по плану, камера, наконец, полетит к месту назначения. в стадии строительства в пустынном высокогорье на севере Чили.
Создание такой сложной камеры требует большого терпения, испытаний и тщательного проектирования. Путь к этому полету был долгим, и еще предстоит пройти какой-то путь, прежде чем конец станет близок.
«Мы находимся на этапе, когда все механизмы камеры полностью собраны, — говорит Ханна Поллек, штатный инженер SLAC.
Любая типичная камера нуждается в объективе, и эта камера, безусловно, не исключение. Этот объектив диаметром 1,57 метра (5 футов) является самым большим в мире, что признано Книгой рекордов Гиннеса. Когда он установлен, он будет ловить свет, отраженный через тройку зеркал, построенных отдельно.
В действии телескоп укажет на участок неба шириной 3,5 градуса, другими словами, шириной в семь раз больше полной Луны. Камера сделает две экспозиции, одна за другой, примерно по 15 секунд каждая, скрепленные колоссальным затвором. Затем телескоп переместится к следующему участку и так далее, выполняя миссию по исследованию южного неба в течение многих лет подряд.
За объективом расположены детекторы, которые представляют собой датчики с зарядовой связью (ПЗС), распространенные в астрономии. При снятой крышке объектива детекторы видны как серебристо-синяя сетка, а разные цвета являются следствием того, что у камеры два разных поставщика.
Вместе они могут создавать изображения размером до 3,2 гигапикселя.Детекторы камеры, серебристый и синий квадраты, видны через открытый объектив шириной 1,5 метра. Jacqueline Ramseyer Orrell/Национальная ускорительная лаборатория SLAC
Чтобы повторять это многократно, эти детекторы необходимо охладить. Вот почему за камерой находится большой пучок трубок. Некоторые из них предназначены для передачи данных или питания, но большая часть связана с охлаждением. Они помогают криостату охлаждать детекторы примерно до -100 °C. Эти температуры устраняют большую часть шума, который в противном случае могли бы уловить ПЗС-матрицы.
Детекторы — не единственная часть камеры, которую нужно держать на льду. Внутренняя электроника камеры генерирует около 1100 Вт тепла, а холодная жидкость прокачивается в качестве счетчика. Для этого не нужен криостат, но это доставило инженерам камеры головную боль.
Недавно им пришлось заменить используемую жидкость, что потребовало полной переделки сантехники. Инженеры все еще возятся с новой системой.Осталось установить несколько компонентов. Для астрономов ключом к работе камеры являются фильтры, которые надеваются на объектив. Их шесть, каждая из которых имеет покрытие, позволяющее пропускать свет только определенной длины волны (например, ультрафиолетового или ближнего инфракрасного). Сделанные в Массачусетсе и Провансе, Франция, и доставленные в Калифорнию, теперь они лежат на полу чистой комнаты камеры.
Когда они будут установлены, пять из них будут сидеть в карусели вокруг камеры, а шестой будет лежать на складе, ожидая своей очереди на замену. На практике механизму требуется около 2 минут, чтобы вставить фильтр между ними. объектив и детекторы. Фильтры сделаны из тонкого стекла, поэтому инженеры тестировали систему с фиктивными металлическими дисками того же веса.
После того, как фильтры установлены вместе с несколькими окончательными панелями корпуса, инженеры наклоняют камеру вниз, чтобы направить ее на пол.
Они проверят его работу в затемненном помещении, перемещая источники света.Если сборка и тестирование камеры — это одна эпопея, то доставка ее до места назначения — совсем другое испытание.
Технические инструкции на английском языке должны быть переписаны на испанском языке для удобства местных чилийских технических специалистов. Линзы и другие стеклянные детали придется снять. Камера должна быть установлена в транспортном контейнере и закреплена внутри специальных рам, специально разработанных для изоляции вибраций и сохранения стабильности камеры при силе до 2 г с.
Даже эта система была протестирована на макете ее специального рейса — зафрахтованного грузового самолета Боинг 747 из Сан-Франциско в Сантьяго, прямого рейса, которого обычно не существует.
«Мы действительно хотим избежать дополнительных грузоперевозок в США», — говорит Марго Лопес, штатный инженер SLAC. «Просто имеет смысл поместить нашу камеру в зафрахтованный самолет, а все остальное в чистой комнате.
У нас невероятное количество вспомогательного оборудования, которое также необходимо вывести из строя».Если все пойдет хорошо на последнем этапе строительства, эта камера вскоре отправится из Калифорнии в Чили и к 2024 году впервые увидит ночное небо.
Продолжить чтение ↓Показать меньше
Новая некоммерческая организация Basis надеется смоделировать человеческое мышление для информирования науки и государственной политики
5 минут чтения
iStock находить закономерности в больших наборах данных — после перехода от более ранних систем, которые более явно моделировали человеческое мышление. Но у глубокого обучения есть свои недостатки: например, модели ИИ часто демонстрируют отсутствие здравого смысла. Новая некоммерческая организация Basis надеется создать программные инструменты, которые усовершенствуют более ранний метод моделирования человеческого мышления, а затем применить этот метод для решения насущных проблем в области научных открытий и государственной политики.
На сегодняшний день Базис получил правительственный грант и пожертвование в размере нескольких миллионов долларов. В число консультантов входят Руи Коста, нейробиолог, возглавляющий Институт Аллена в Сиэтле, и Энтони Филиппакис, директор по данным Института Броуда в Кембридже, штат Массачусетс. В июле за тако на Международной конференции по машинному интеллекту я поговорил с Зенной Таварес. , соучредитель Basis, и Сэм Уитти, научный сотрудник Basis, о человеческом интеллекте, проблемах с академическими кругами и сборе мусора. Следующая стенограмма была отредактирована для краткости и ясности.
С чего начинался Basis?
Зенна Таварес: Я закончила Массачусетский технологический институт в начале 2020 года, как раз перед пандемией. Мои исследования были связаны с вероятностным выводом и причинно-следственными рассуждениями. Я делал довольно сложные имитационные модели. Например, если вы ведете машину и попали в аварию, разбились бы вы, если бы ехали медленнее? Я создал несколько инструментов для автоматизации такого рода рассуждений.
Но это тяжелая работа в обычной академической среде. Для этого требуется более одного аспиранта, работающего над ним одновременно. Итак, как мы можем создать организацию, ориентированную на этот несколько нетрадиционный подход к исследованиям ИИ? Кроме того, будучи немного выгоревшим из-за моей докторской степени, я подумал, что было бы здорово, если бы мы могли применить это к реальному миру.Что делает ваш подход нетрадиционным?
Tavares: В настоящее время основным направлением исследований ИИ является глубокое машинное обучение, когда вы получаете много данных и обучаете большую модель, чтобы попытаться изучить закономерности. Будь то GPT-3 или DALL-E, многие из этих моделей основаны на попытке эмулировать человеческую производительность путем сопоставления человеческих данных. Наш подход отличается тем, что мы пытаемся понять некоторые основные принципы рассуждений. Люди строят ментальные модели мира, и мы используем эти модели, чтобы делать выводы о том, как устроен мир.
А под выводами я подразумеваю предсказания будущего или контрфактуалы — каким был бы мир, если бы все было иначе? Мы много работаем с представлениями, такими как модели на основе симуляции, которые позволяют вам выражать очень сложные вещи. Можем ли мы построить действительно сложные модели как для здравого смысла, так и для науки?Сэм Уитти: Области применения, которые нас особенно интересуют и которые, как мне кажется, недостаточно освещены в существующей литературе по машинному обучению, опираются на большой объем человеческих знаний. И часто у ученых есть много знаний, которые они могут использовать для решения проблемы. Одна из основных технических тем нашей работы будет посвящена гибридизации, получению лучшего из классических подходов к ИИ, основанных на рассуждениях, и современных методов машинного обучения, где ученые и политики могут обмениваться частичными знаниями о мире, а затем заполнять пробелы. с машинным обучением.
Почему каузальные методы используются реже?
Таварес: С одной стороны, это просто очень сложная техническая задача.
Во-вторых, многие достижения в области глубокого обучения произошли благодаря тому, что крупные компании вложили средства в эту конкретную технологию. Теперь вы можете просто загрузить программный пакет и построить нейронную сеть.Остроумный: Я думаю, что отчасти это связано с проблемами, которые мы пытаемся решить. Подумайте об областях применения, на которых сосредоточились крупные технологические компании. Они извлекают выгоду из огромных объемов данных и не так сильно полагаются на человеческие знания. Вы можете просто собрать миллионы и миллионы изображений и обучить модель компьютерного зрения. Не так очевидно, как это сделать с научными открытиями или разработкой политики.
Вы применяете машинное обучение для разработки политики?
Таварес: Мы занимаемся этим. Как вы моделируете город? Мы начинаем вести переговоры с агентствами в Нью-Йорке. Как решить проблему с мусором? Как мы можем уменьшить бездомность? Если мы реализуем эту политику, что произойдет? И обратная проблема: если мы хотим уменьшить количество мусора и уменьшить количество бездомных, какие политики мы должны реализовать? Как мы должны распределять ресурсы? Можем ли мы построить многомасштабные модели, которые охватывают различные компоненты города каким-то последовательным и целостным образом? А также сделать его доступным, чтобы вы действительно могли помочь политикам ответить на некоторые конкретные вопросы?
Будете ли вы работать с городскими властями, чтобы отвечать на конкретные вопросы о вывозе мусора или разрабатывать новые инструменты, которые каждый может использовать для решения подобных проблем?
Tavares: Мы начинаем с конкретных вопросов, но чтобы ответить на них, нам потребуется более общий набор возможностей.
Можем ли мы построить модель нескольких кварталов Нью-Йорка на уровне масштаба, которого раньше не было? Затем эту модель можно использовать для постановки различных вопросов. Но чтобы убедиться, что мы обоснованы, мы хотим задать определенный набор вопросов.Witty: Особенно важно то, что мы хотим привлечь экспертов и заинтересованные стороны, закодировать их знания, их предпочтения, их цели.
Таварес: Что само по себе довольно сложная проблема. Массового массива данных об общепринятых знаниях людей о городской среде не существует. Мы взволнованы, потому что я думаю, что есть реальная возможность сделать эти две вещи в тандеме — построить эту основу для вывода, но также иметь немедленный эффект.
Вы будете публиковать статьи?
Остроумный: Да, мы, безусловно, хотим общаться с исследовательским миром. И в организационном плане мы планируем, чтобы с Basis работали люди, которые не являются сотрудниками Basis, и часто они будут академическими исследователями, заинтересованными в публикации и развитии своей академической карьеры.
Одна вещь, которую я скажу, это то, что лично, во время моей докторской диссертации, я часто определял проекты с бумагой в качестве конечной цели, и я планирую изменить это мышление, чтобы сосредоточиться на работе, а затем использовать Бумага как средство коммуникации. Но да, мы не хотим быть отшельниками в лесу в течение 20 лет, а затем выйти с этой большой технологией, которая теперь устарела и полностью отключена от остального мира.Tavares: Мы ориентированы на программное обеспечение с открытым исходным кодом, а не на бумажные документы. А с точки зрения программного обеспечения нам нужен унифицированный корпус программного обеспечения. Мы пытаемся построить платформу, а не кучу разных проектов.
Не могли бы вы рассказать больше о преимуществах некоммерческой организации?
Tavares: Будучи студентом, ваша цель — опубликовать статьи и получить высшее образование. И это лишь слабо связано с проведением эффективных исследований.
Мы работаем как одна команда, и наши цели совпадают с тем, что мы хотим делать. Мы не уникальны в этом. Посмотрите на документы, выходящие из DeepMind. У них около 30 авторов. Я думаю, что научное сообщество отлично подходит для многих вещей, в том числе для изучения новых идей. Но сложнее, по крайней мере, по моему опыту, создать надежную технологию. Это не вознаграждается.Остроумие: Это некоммерческая организация, а не академическая. С другой стороны, безусловно, крупные технологические компании могут сотрудничать в больших командах и развивать общую инфраструктуру. Но есть и стимулы, которые могут мешать работе, которую мы хотим делать. Тот факт, что мы не обязаны получать прибыль, действительно освобождает.
Будут ли продукты или услуги приносить доход помимо грантов и пожертвований?
Tavares: Будем надеяться, что если нам удастся построить то, что мы планируем построить, у нас будет много разных областей, в которых мы могли бы это сделать.
Это немного странная новая организация. Многие вещи не являются определенными, и я не хочу передавать вещи более высеченными или просчитанными, чем они есть на самом деле.Продолжить чтение ↓Показать меньше
Зарегистрируйтесь для участия в этом веб-семинаре, чтобы усовершенствовать свои процессы моделирования и проектирования микрожидкостных устройств «орган-на-чипе» с помощью COMSOL Multiphysics
1 мин чтения
Comsol Logo
Comsol type
0 90: вебинармикрофлюидикаCOMSOLмультифизическое моделированиесимуляция
Если вы хотите усовершенствовать свои процессы моделирования и проектирования микрофлюидных устройств «орган-на-чипе», присоединяйтесь к этому веб-семинару.
Вы изучите методы моделирования производительности и поведения микрожидкостных устройств «орган-на-чипе» и микрофизиологических систем в COMSOL Multiphysics. Кроме того, вы увидите, как соединить несколько физических эффектов в своей модели, включая химический перенос, отслеживание частиц и взаимодействие жидкости со структурой.
9019-2017 4 Improved 1057-
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Пьяцца К., Саймон А.М., Тернер К.Л., Миллер Л.А., Каталано М.Г., Бикки А. и др. (2020). Изучение расширенных возможностей захвата в мульти-синергетической мягкой бионической руке. Дж. Нейроинж. Реабилит. 17:116. doi: 10.1186/s12984-020-00741-y
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Прохазка А. (2021). Проприоцепция: клиническая значимость и нейрофизиология. Курс. мнение Физиол. 23:100440. doi: 10.1016/j.cophys.2021.05. 003
CrossRef Полный текст | Google Scholar
Rack, PMH, and Westbury, DR (1969). Влияние длины и скорости стимула на напряжение изометрической кошачьей камбаловидной мышцы. J. Physiol. 204, 443–460. doi: 10.1113/jphysiol.1969.sp008923
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Распопович С., Валле Г. и Петрини Ф. М. (2021). Сенсорная обратная связь для протезов конечностей у людей с ампутированными конечностями. Нац. Матер. 20, 925–939. doi: 10.1038/s41563-021-00966-9
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Розенблатт, Ф. (1958). Персептрон: вероятностная модель хранения и организации информации в мозгу. Психолог. Ред. 65, 386–408. doi: 10.1037/h0042519
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Руджорд, Т. (1970). Механическая модель второго порядка первичных окончаний мышечного веретена. Кибернетик 6, 205–213. doi: 10.1007/BF00276721
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Солсбери, Дж. К., и Крейг, Дж. Дж. (1982). Шарнирные руки: контроль силы и проблемы кинематики. Междунар. Дж. Робот. Рез. 1, 4–17. doi: 10.1177/027836498200100102
Полный текст CrossRef | Google Scholar
Сангер, Т. Д. (2007). Байесовская фильтрация миоэлектрических сигналов. J. Нейрофизиол. 97, 1839–1845 гг. doi: 10.1152/jn.00936.2006
Реферат PubMed | Полный текст перекрестной ссылки | Google Scholar
Сондерс, Дж. А., и Книлл, округ Колумбия (2004). Визуальная обратная связь для контроля движений рук. J. Neurosci. 24, 3223–3234. doi: 10.1523/JNEUROSCI.4319-03.2004
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Шаафсма А., Оттен Э. и Ван Виллиген Дж. Д. (1991). Модель мышечного веретена для первичной афферентной импульсации, основанная на моделировании интрафузальных механических событий. J. Нейрофизиол. 65, 1297–1312. doi: 10.1152/jn.1991.65.6.1297
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Сегил, Дж. Л., и Вейр, Р.Ф.Ф.Ф. (2014). Разработка и проверка трансформирующегося миоэлектрического контроллера положения руки на основе анализа основных компонентов хватания человека. IEEE Trans. Нейронная система. Реабилит. англ. 22, 249–257. doi: 10.1109/TNSRE.2013.2260172
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Сонг Д., Лан Н., Леб Г. Э. и Гордон Дж. (2008). Сенсомоторная интеграция на основе моделей для управления несколькими суставами: разработка виртуальной модели руки. Энн. Биомед. англ. 36, 1033–1048. doi: 10.1007/s10439-008-9461-8
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Тан, Д. В., Шифер, М. А., Кит, М. В., Андерсон, Дж. Р., Тайлер, Дж., и Тайлер, Д. Дж. (2014). Нейронный интерфейс обеспечивает долговременное стабильное естественное сенсорное восприятие. Науч. Перевод Мед. 6:257ra138. doi: 10.1126/scitranslmed.3008669
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Валеро-Куэвас, Ф.Дж., Йи, Дж., Браун, Д., Макнамара, Р.В., Пол, К., и Липсон, Х. (2007). Сеть сухожилий пальцев выполняет анатомические вычисления в макроскопическом масштабе. IEEE Trans. Биомед. англ. 54, 1161–1166. doi: 10.1109/TBME.2006.889200
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Вейлер Дж., Гриббл П.Л. и Прушинский Дж.А. (2019). Рефлексы растяжения позвоночника поддерживают эффективное управление руками. Нац. Неврологи. 22, 529–533. doi: 10.1038/s41593-019-0336-0
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Вэнь Р., Юань К., Ван К., Хэн С. и Ли З. (2020). Высокоточное управление захватом хрупких и деформируемых объектов под управлением силы с использованием прогнозирования силы на основе sEMG. Доступно в Интернете по адресу: http://arxiv. org/abs/2002.01791 (по состоянию на 15 февраля 2020 г.).
Google Scholar
Winges, S.A., Weber, D.J., and Santello, M. (2003). Роль зрения в предформировании руки во время дотягивания до захвата. Экспл. Мозг Res. 152, 489–498. doi: 10.1007/s00221-003-1571-9
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Woittiez, R.D., Huijing, P.A., Boom, H.B.K., and Rozendal, R.H. (1984). Трехмерная модель мышц: количественная связь между формой и функцией скелетных мышц. Дж. Морфол. 182, 95–113. doi: 10.1002/jmor.1051820107
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Ян Д., Гу Ю., Такор Н. В. и Лю Х. (2019). Улучшение функциональности, надежности и адаптивности миоэлектрического контроля для восстановления ловкости движений. Экспл. Мозг Res. 237, 291–311. doi: 10.1007/s00221-018-5441-x
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Zajac, FE (1989). Мышцы и сухожилия: свойства, модели, масштабирование и применение в биомеханике и управлении двигателем. Крит. Преподобный Биомед. англ. 17, 359–411.
Google Scholar
Zhang, Z., Zhang, J., Niu, C.M., Hao, M., and Lan, N. (2021). «Интегрированная платформа виртуальной руки для оценки управления протезом руки на основе моделей», в материалах Международной конференции IEEE по вычислениям в реальном времени и робототехнике. (Синин: Институт инженеров по электротехнике и электронике).
Google Scholar
Чжуан К.З., Соммер Н., Мендес В., Ариан С., Форменто Э., Д’Анна Э. и др. (2019). Совместное пропорциональное управление человеком и роботом ловким миоэлектрическим протезом. Нац. Мах. Интел. 1, 400–411. doi: 10.1038/s42256-019-0093-5
CrossRef Полный текст | Google Scholar
Золло Л., Ди Пино Г., Чансио А. Л., Раньери Ф., Корделла Ф., Джентиле К. и др. (2019). Восстановление тактильных ощущений с помощью нейронных интерфейсов для замкнутого контроля силы и проскальзывания бионических рук в реальном времени. Науч. Робот. 4:eaau9924. doi: 10.1126/scirobotics.aau9924
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Приложение
Таблица А1. Резюме показателей результатов функционального теста для участников.
Таблица А2. Резюме показателей результатов функционального теста для участников с опытом myocontrol и без него.
Обзор литературы
Чтобы проанализировать эффективность BC и PLF в более широкой перспективе, результаты также сравниваются с другими литературными исследованиями, в которых используется стандартная BBT для оценки эффективности протезов рук и стратегий контроля. В таблице A3 представлены средние результаты для участников и других протезов рук в литературе. Обратите внимание, что обзор литературы может быть неполным. В него входят только те протезы миоэлектрического управления.
Таблица A3A. Средние результаты для лиц с ампутацией с использованием BC и PLF.
Таблица A3B. Производительность других протезов рук в литературе.