Содержание
Бионические роботизированные протезы/ИНЭУМ
ИНЭУМ
Исследования и разработки
Бионические роботизированные протезы
Используя последние достижения в области компьютерных технологий, материаловедения, робототехники, нейрофизиологии, нейропсихологии и нейрореабилитации ПАО «ИНЭУМ им. И.С. Брука» планирует запуск серийного производства передовых отечественных бионических роботизированных протезов (работа выполнена в рамках ФЦП «Развитие фармацевтической и медицинской промышленности Российской Федерации на период до 2020 года и дальнейшую перспективу»).
Медицинский соисполнитель ФБГУ «Приволжский федеральный медицинский исследовательский центр» Минздрава России
БИНК – БИОНИЧЕКАЯ ИНТЕЛЛЕКТУАЛЬНАЯ НИЖНЯЯ КОНЕЧНОСТЬ
БИНК – бионическая интеллектуальная нижняя конечность, не имеющая серийно выпускаемых мировых аналогов, обеспечивающая наиболее полное восполнение функций нижних конечностей, утраченных вследствие ампутации. БИНК является первым полностью активно-ассистивным протезом бедра, в котором реализуется синергетический эффект от совместного применения модуля коленного КИМ-21 и модуля стопы КИМ-10. Наиболее ярко этот эффект выражен при подъеме по лестнице пользователей с короткой культей бедра или c низкими физическими возможностями. При использовании «традиционных» протезов такие пользователи поднимаются по лестнице «приставным» шагом, а в случае использования БИНК возможен нормальный тип движения – попеременный шаг. В фазе переноса сокращается функциональная длина БИНК за счет поднятия носка модуля стопы КИМ-10 и сгибания модуля коленного КИМ-21. При контакте БИНК с поверхностью ступени модуль стопы возвращается в нейтральное положение, а модуль коленный КИМ-21 выполняет активное разгибание, тем самым помогая пользователю подниматься.
БИНК является первым полностью активно-ассистивным протезом бедра, в котором реализуется синергетический эффект от совместного применения модуля коленного КИМ-21 и модуля стопы КИМ-10. Наиболее ярко этот эффект выражен при подъеме по лестнице пользователей с короткой культей бедра или c низкими физическими возможностями. При использовании «традиционных» протезов такие пользователи поднимаются по лестнице «приставным» шагом, а в случае использования БИНК возможен нормальный тип движения – попеременный шаг. В фазе переноса сокращается функциональная длина БИНК за счет поднятия носка модуля стопы КИМ-10 и сгибания модуля коленного КИМ-21. При контакте БИНК с поверхностью ступени модуль стопы возвращается в нейтральное положение, а модуль коленный КИМ-21 выполняет активное разгибание, тем самым помогая пользователю подниматься.
Система управления БИНК гибко сочетает командное управление пользователем и автоматизированное управление, при этом приоритетной задачей является безопасность пользователя.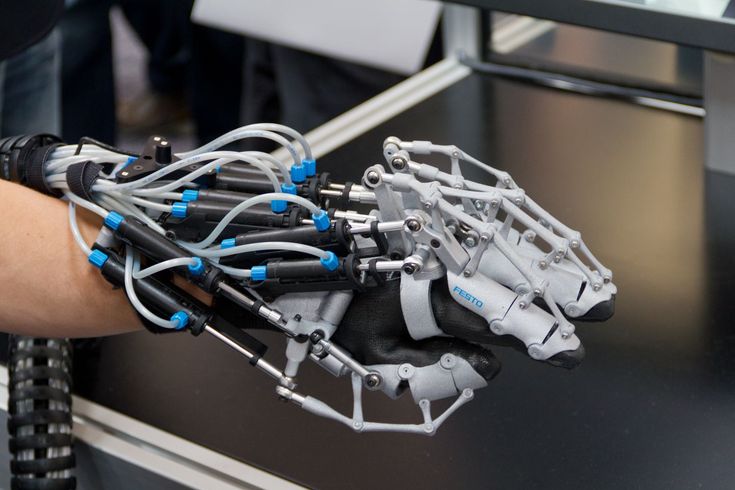 Такое решение дает пользователю возможность не «задумываться» над тем как выполнить движение, но в тоже время дает возможность непосредственно влиять на параметры функционирования своей бионической интеллектуальной конечности.
Такое решение дает пользователю возможность не «задумываться» над тем как выполнить движение, но в тоже время дает возможность непосредственно влиять на параметры функционирования своей бионической интеллектуальной конечности.
Ресурса аккумулятора БИНК хватает на день функционирования в нормальных условиях. В случае разрядки аккумулятора пользователь может оперативно заменить его на запасной, который входит в комплект поставки.
БИНК предназначен для протезирования людей с ампутацией нижних конечностей на уровне бедра и с уровнем активности 2-3.
БИОНИЧЕСКИЙ РОБОТИЗИРОВАННЫЙ МОДУЛЬ КОЛЕНА КИМ-21*
Модуль колена КИМ-21 – шаг вперед в области отечественного протезостроения. В отличие от всех предыдущих коленных модулей, осуществляющих сгибание и разгибание под действием инерционных и внешних сил, КИМ-21 может сгибаться/разгибаться за счет встроенного привода с собственным источником питания, реализуя функции не только коленного сустава, но и функцию мышц сгибателей/разгибателей коленного сустава. В результате пользователь получает активную помощь от модуля коленного КИМ-21 в наиболее сложных для него ситуациях, таких как: подъем по лестнице; вставание из положения сидя; перешагивание препятствий.
В результате пользователь получает активную помощь от модуля коленного КИМ-21 в наиболее сложных для него ситуациях, таких как: подъем по лестнице; вставание из положения сидя; перешагивание препятствий.
Это снижает компенсаторные нагрузки на здоровую конечность, что в свою очередь увеличивает свободу и комфортность передвижений. Для безопасности и комфорта пользователя при длительном стоянии в модуле реализован механизм автоматической блокировки сгибания. Модуль коленный КИМ-21 непрерывно отслеживает скорость движения, тип поверхности и особенности движений пользователя, обеспечивая наиболее естественную походку. При разрядке аккумулятора, КИМ-21 продолжает обеспечивать безопасность передвижения.
Модуль коленный КИМ-21 предназначен для протезирования людей с ампутацией нижних конечностей на уровне бедра и с уровнем активности 2-4.
* КИМ — компьютеризированный интеллектуальный модуль
БИОНИЧЕСКИЙ РОБОТИЗИРОВАННЫЙ МОДУЛЬ КОЛЕНА КИМ-20
КИМ-20 – бионический коленный модуль, сочетающий в себе естественность движений с одной стороны, а с другой стороны невысокую массу и цену. В основе коленного модуля лежит надежное, проверенное временем решение на основе управляемой гидравлики. Интегрированная система управления обеспечивает пользователю защиту от неконтролируемого сгибания в любых условиях. Модуль КИМ-20 может длительное время работать без подзарядки аккумулятора, что дает пользователю широкую свободу перемещений. В случае разрядки аккумулятора модуль перейдет в экономичный режим работы, что позволит пользователю в безопасном режиме добраться до зарядного устройства.
В основе коленного модуля лежит надежное, проверенное временем решение на основе управляемой гидравлики. Интегрированная система управления обеспечивает пользователю защиту от неконтролируемого сгибания в любых условиях. Модуль КИМ-20 может длительное время работать без подзарядки аккумулятора, что дает пользователю широкую свободу перемещений. В случае разрядки аккумулятора модуль перейдет в экономичный режим работы, что позволит пользователю в безопасном режиме добраться до зарядного устройства.
Модуль коленный КИМ-20 предназначен для протезирования людей с ампутацией нижних конечностей на уровне бедра и с уровнем активности 2-4. КИМ-20 полностью совместим с модулем стопы КИМ-10.
БИОНИЧЕСКИЙ РОБОТИЗИРОВАННЫЙ МОДУЛЬ СТОПЫ КИМ-10
КИМ-10 – первый отечественный бионический активно-ассистивный модуль стопы, предназначен для протезирования людей с ампутацией нижних конечностей на уровне голени и бедра и с уровнем активности 2-4. При ходьбе на протезе, в состав которого входит модуль стопы КИМ-10, пользователю в большинстве случаев нет необходимости «задумываться» как ему сделать следующий шаг – композитная стопа обеспечит устойчивость на мелких неровностях поверхности, а встроенный микропроцессор на основании сигналов с датчиков обеспечит изменение угла голеностопного шарнира в соответствии с наклоном опорной поверхности.
При ходьбе на протезе, в состав которого входит модуль стопы КИМ-10, пользователю в большинстве случаев нет необходимости «задумываться» как ему сделать следующий шаг – композитная стопа обеспечит устойчивость на мелких неровностях поверхности, а встроенный микропроцессор на основании сигналов с датчиков обеспечит изменение угла голеностопного шарнира в соответствии с наклоном опорной поверхности.
Применение композитной стопы позволяет эффективно запасать энергию при контакте с поверхностью и отдавать энергию в момент отталкивания, что приводит к снижению затрат энергии пользователя, расходуемой на ходьбу. Модуль КИМ-10 обеспечивает защиту пользователя от спотыкания – в переносной фазе цикла шага осуществляется поднятие носка стопы, аналогично тому, как это происходит у естественной стопы.
КИМ-10 прост и комфортен в эксплуатации. Пользователю больше не нужно беспокоиться при смене обуви – модуль осуществит автоматическую подстройку под высоту каблука. Все это позволяет человеку перенесшему ампутацию нижней конечности наиболее полно вернуться к привычной для него жизни.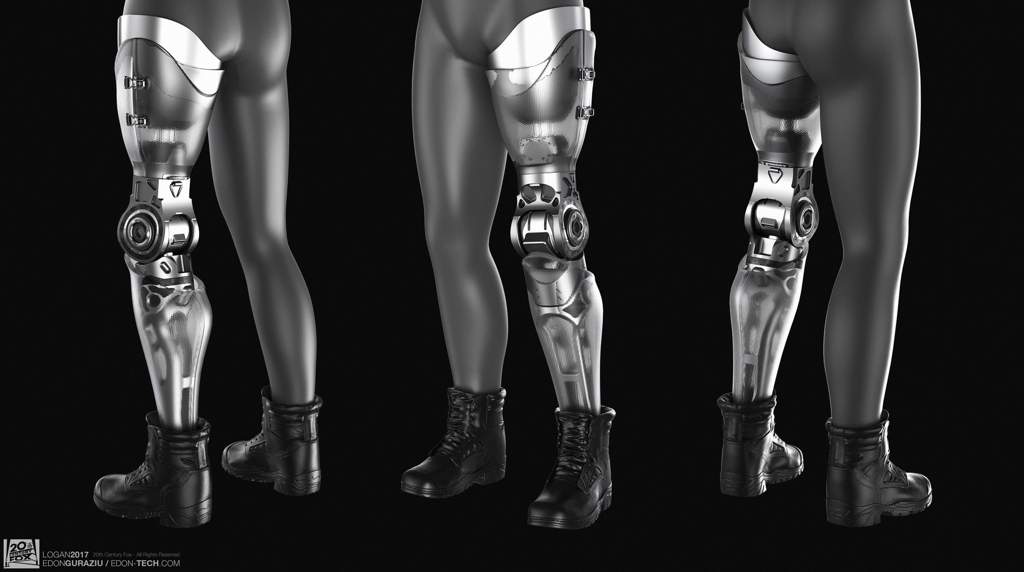
БИОНИЧЕСКИЙ РОБОТИЗИРОВАННЫЙ МОДУЛЬ ЛОКТЯ КИМ-30
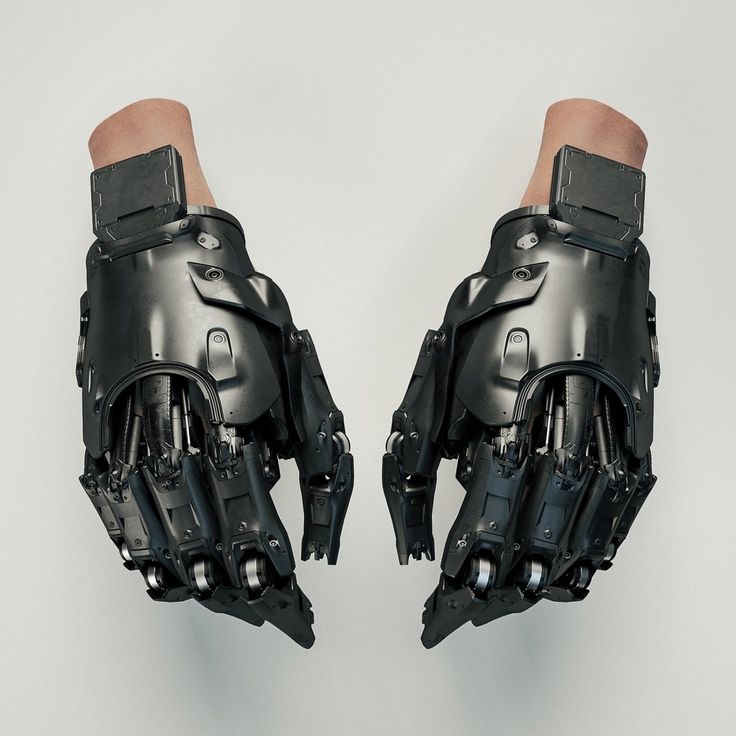
Бионический роботизированный модуль локтя КИМ-30 предназначен для протезирования пациентов с ампутацией на уровне плеча. КИМ-30 наиболее полно восстанавливает функции утраченного локтевого сустава. Пользователь осуществляет управление сгибанием и разгибанием КИМ-30, напрягая и расслабляя сохранившиеся мышцы плеча, причем имеет возможность не только осуществить сгибание на определенный угол, но и контролировать скорость перемещения. В движении локтевой модуль практически бесшумен, может «поднимать» груз и обеспечивать бесступенчатую фиксацию с возможностью удержания груза. КИМ-30 обеспечивает защиту пользователя от опасных нагрузок – в случае превышения допустимой нагрузки КИМ-30 осуществляет плавное разгибание/сгибание. Кроме этого КИМ-30 предоставляет пользователю возможность поворота предплечья относительно плеча в ручном режиме. Размеры модуля позволяют его скрыть под косметической оболочкой. Все это обеспечивает пользователю естественность и простоту при эксплуатации модуля локтя КИМ-30.
РЕГУЛИРОВОЧНО-СОЕДИНИТЕЛЬНЫЕ ИЗДЕЛИЯ
Регулировочно-соединительные изделия предназначены для сборки протезов нижних конечностей и подстройки протеза под анатомические особенности пациента. Применяются для протезирования конечностей у пациентов весом до 125 кг и любой группы активности.
|
Адаптеры с двумя гнездами различной длины
|
Пирамидки с фланцем
|
Адаптер регулируемый с двумя гнездами
|
|
Замок для силиконового чехла
|
Поворотные устройства на фланец
|
Гильзовые адаптеры
|
|
Ротатор
|
Адаптер с двумя степенями регулировки
|
Адаптер двусторонний
|
|
Модули несущие
| ||
Код для размещения ссылки на данный материал в блоге:
Бионические роботизированные протезы
Используя последние достижения в области компьютерных технологий, материаловедения, робототехники, нейрофизиологии, нейропсихологии и нейрореабилитации «ИНЭУМ им.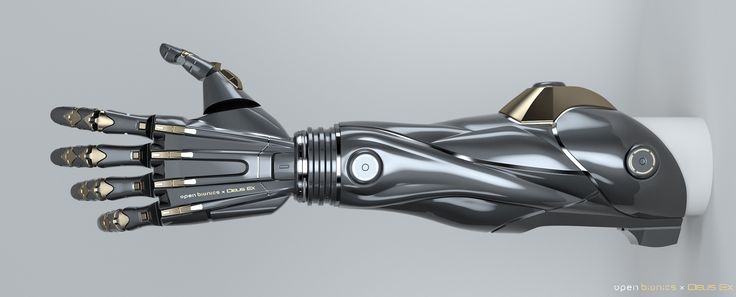 И.С. Брука» планирует запуск серийного производства передовых отечественных бионических роботизированных протезов (работа выполнена в рамках ФЦП «Развитие фармацевтической и медицинской промышленности Российской Федерации на период до 2020 года и дальнейшую перспективу»).
И.С. Брука» планирует запуск серийного производства передовых отечественных бионических роботизированных протезов (работа выполнена в рамках ФЦП «Развитие фармацевтической и медицинской промышленности Российской Федерации на период до 2020 года и дальнейшую перспективу»).
ineum.ru
Как будет выглядеть ссылка:
Бионические роботизированные протезы
Используя последние достижения в области компьютерных технологий, материаловедения, робототехники, нейрофизиологии, нейропсихологии и нейрореабилитации «ИНЭУМ им. И.С. Брука» планирует запуск серийного производства передовых отечественных бионических роботизированных протезов (работа выполнена в рамках ФЦП «Развитие фармацевтической и медицинской промышленности Российской Федерации на период до 2020 года и дальнейшую перспективу»).
ineum.ru
Бионическая рука, биомеханический протез руки бесплатно в Украине
Бионический протез руки – надежные и инновационные устройства
Современные технологии сделали уже такой скачок, что даже при ампутации конечности, уникальные устройства дают возможность продолжить обычную жизнь. И биомеханический протез руки способствует этому.
И биомеханический протез руки способствует этому.
Высокоэффективная биомеханическая рука позволяет человеку продолжать вести нормальный образ жизни, заниматься спортом и досугом, выполнять трудовую деятельность, работать за компьютером…
Центр протезно-ортопедической помощи Теллус предлагает профессиональное изготовление бионического протеза кисти руки или других аппаратов для человека.
Что такое бионическая рука и как она работает?
Биопротез руки (бионический, биоэлектрический и миоэлектрический) – это устройство, которое имеет внешний источник питания, требует подзарядки и выполняет ряд функций. Он более современный, чем механический или пассивный протез, так как оборудован датчиками для электромагнитных сигналов.
Управление аппаратом выполняется через специальные датчики, которые получают сигналы от здоровых мышц. В организме человека все движения, сгибы или другие задачи к телу поступают от мозга через электрические импульсы. И их можно улавливать, чтобы передавать сигналы на протез.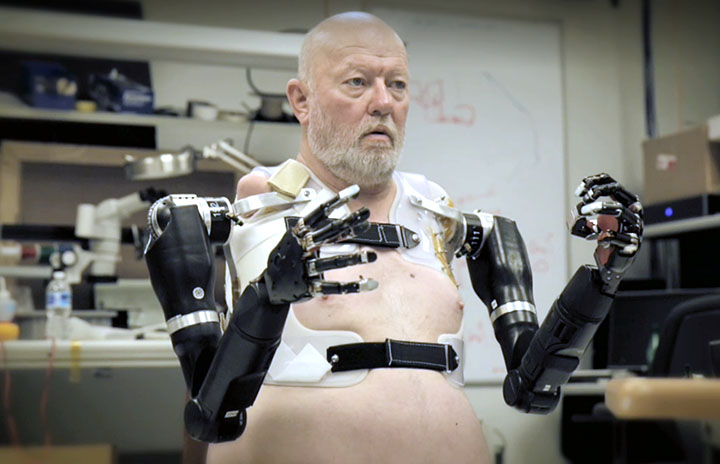
Бионический протез с внешним источником питания – это система датчиков, которые получают импульсы тела. Это работает так же, как и с естественными конечностями. Если человек хочет поднять руку, показать палец или согнуть локоть, то сигнал поступает от мозга не на мышцы (которые отсутствуют при ампутации), а на датчики. И те уже передают его на механизм кибернетического протеза руки, благодаря чему она поднимается, выводится палец или сгибается локоть.
Механический протез руки, в отличие от более современного варианта, выполняет поставленные задачи при помощи механической тяги. Тут нет электронных частей или приводов, а все процессы происходят автономно. Научится им управлять намного проще, чем бионическими.
Виды и особенности бионических протезов рук
Сейчас бионические или электронные протезы рук разделяют на два больших вида – односхватный и многосхватный, каждый из которых отличается своими преимуществами и особенностями.
Односхватный – это протез, который оснащен одним видом схвата. Он оборудован моторчиком, который способствует одновременному схватыванию предмета или кисти руки. Это позволяет выполнять простые задачи и процессы.
Он оборудован моторчиком, который способствует одновременному схватыванию предмета или кисти руки. Это позволяет выполнять простые задачи и процессы.
Достоинства односхватной бионической руки:
- подходит для несложных задач, например, так можно взять стакан или держаться за предмет;
- оснащен чуткой программой управления захвата или силы воздействия, чтобы брать хрупкие изделия без риска их сломать;
- можно оборудовать дополнительным функционалом – бесконтактной оплатой, встроенным GPS, экраном состоянии, а некоторые варианты даже подключаются к телефону;
- диапазон раскрытие и минимальное сжатие;
- работает без зарядки до нескольких дней.
Устройство подходит тем, кто прошел ампутацию руки от предплечья, имеет слаборазвитые мышцы или планирует переход к более сложному аппарату.
Многосхватный протез – это такой механизм, при котором каждый палец получает сигнал и может сгибаться индивидуально. Тут установлено несколько двигательных систем для пальцев, что позволяет выполнять огромное количество функций, жестов и задач. Количество таких жестов настраиваться программно, а их разновидность меняется в зависимости от потребностей пользователя.
Количество таких жестов настраиваться программно, а их разновидность меняется в зависимости от потребностей пользователя.
Среди главных преимуществ такого протеза выделяют:
- Широкий диапазон захвата.
- До 13 функций управления и захвата предметов.
- Дополнительные комплектующие для составления устройства.
- Возможность менять внешний вид под предпочтения, даже через пару лет использования протеза.
- Управляется программами через телефон.
- Высокий уровень нагрузки и силы сжатия.
- Варианты для оборота запястья, изгибов.
Многосхватное оборудование многофункциональное, но и у него выше цена, чем у односхватного.
Активные протезы рук: когда можно заказывать
У бионической кисти есть множество функций и преимуществ. Но для того, чтобы в полной мере получить лучше устройство, нужно соблюдать несколько рекомендаций:
- Пройти реабилитацию после установки Bebionic кисти, чтобы научится правильно ею управлять и подавать команды.

- Чем раньше после ампутации будет установлен протез, тем выше шанс правильной и нормальной работы оборудования. Так как через длительный период времени ткани начинают постепенно атрофироваться и мышцы уже не смогут подавать правильные сигналы.
- Если протезы верхней конечности Bebionic устанавливается на поврежденную культю, то нужно пройти специальные тренировки от реабилитологов.
- Нужно регулярно проходить медицинский осмотр, чтобы убедится в работе протеза и состоянии тела.

Все миоэлектрические протезы кисти изготавливаются индивидуально, поэтому предварительные консультации со специалистами Теллус необходимы.
Как выбрать и сколько стоит купить роботизированный протез на руку?
Стоит отметить, что такая многофункциональность и сложность механизма, делает кибер протезы рук более дорогостоящими, чем другие виды аппаратов для конечностей. К тому же, каждый человек после ампутации имеет свои характеристики. Насколько профессионально выполнена ампутация, какой уровень развития мышц, сколько подкожного жира или какое состояние кожи – все это влияет на то, какой купить бионический протез кисти рук. И чем хуже параметры, тем более функциональное устройство понадобится.
И чем хуже параметры, тем более функциональное устройство понадобится.
Также многофункциональный протез руки выбирается в соответствии с другими показателями:
- индивидуальными требованиями пациента к работоспособности кисти;
- уникальные настройки к выполнению задач;
- длина руки, необходимая сила захвата, рост и вес человека.
Поэтому кибер устройства могут быть намного дороже, чем механические протезы рук. Но при этом они намного более надежные, способны выполнять ряд функций, больше приближены к естественной руке и ее управлению.
Почему стоит обратиться в центр Tellus?
Центр протезно-ортопедической помощи Теллус в Одессе – это настоящие профессионалы с опытом производства протезов в 20 лет. У нас пациент получит:
- помощь опытных специалистов, которые имеют высшие квалификации, регулярно обучаются и проходят тренинги лучших мировых экспертов в области протезирования;
- безопасные, надежные и доступные по стоимости роботизированные протезы руки или других конечностей;
- устройства производятся из материалов, которые выпускаются на высокотехнологичном немецком оборудовании;
- предлагаем реабилитацию, помощь в выборе подходящего протеза, медицинский осмотр на совместимость с видами изделий;
- изготавливаем аппараты любой сложности – как для определенных видов работы, так и пассивные протезы для каждого.
Стоимость бионических протезов рук в Украине в компании Теллус определяется индивидуально и зависит от разных факторов. Но выбирая наш центр, вы получите услуги по лучшей цене без переплат и наценок.
Центр протезно-ортопедической помощи Tellus – ваш залог полноценной жизни с лучшими протезами.
Роботизированные протезы конечностей
На этой странице
Авторское правоСтатьи по теме
В современном обществе ежегодно во всем мире проводится более миллиона ампутаций конечностей из-за несчастных случаев, военных потерь, сердечно-сосудистых заболеваний, опухолей или врожденных аномалий. Роботизированный протез конечности — это хорошо зарекомендовавшая себя область исследований, объединяющая передовую мехатронику, интеллектуальное восприятие и контроль для достижения утраченных сенсомоторных функций более высокого порядка при сохранении физического вида ампутированной конечности. Ожидается, что роботизированные протезы конечностей заменят отсутствующие конечности человека с ампутированной конечностью, восстановив утраченные функции и обеспечив эстетичный внешний вид. Основными аспектами являются расширенное социальное взаимодействие, комфортная жизнь человека с ампутированной конечностью и продуктивная жизнь человека с ампутированной конечностью в обществе. С развитием сенсорных технологий за последние несколько десятилетий в этой области был сделан значительный вклад. Большая часть работы все еще находится на стадии исследований, и в ближайшие годы ожидается проведение дополнительных исследований и разработок, конечной целью которых является создание устройства, способного генерировать движения, подобные человеческим.
Ожидается, что роботизированные протезы конечностей заменят отсутствующие конечности человека с ампутированной конечностью, восстановив утраченные функции и обеспечив эстетичный внешний вид. Основными аспектами являются расширенное социальное взаимодействие, комфортная жизнь человека с ампутированной конечностью и продуктивная жизнь человека с ампутированной конечностью в обществе. С развитием сенсорных технологий за последние несколько десятилетий в этой области был сделан значительный вклад. Большая часть работы все еще находится на стадии исследований, и в ближайшие годы ожидается проведение дополнительных исследований и разработок, конечной целью которых является создание устройства, способного генерировать движения, подобные человеческим.
Этот специальный выпуск посвящен созданию междисциплинарного форума для обсуждения последних достижений в области роботизированных протезов конечностей. Для публикации в этом специальном выпуске были отобраны пять статей. Двое из них на протезах верхних конечностей, остальные трое – на протезах нижних конечностей.
Одна из статей посвящена роботизированным протезам верхних конечностей. Он предлагает трансрадиальный роботизированный протез с гибридным приводом и несколькими степенями свободы. В большинстве гибридных протезов используется индивидуальное и развязанное управление суставами, а также электрическое приведение в действие или приведение в действие силой тела. Авторы этой статьи внесли свой вклад в разработку роботизированного протеза HyPro. Он использует гибридную концепцию питания для восстановления функций захвата, аналогичную биологической руке. HyPro — это малоактивный робот с 15 степенями свободы, который может выполнять пять моделей захвата: силовой захват, захват кончиком, боковой захват, захват крюком и индексная точка. Механизм с недостаточным приводом может обеспечить требуемую предварительную форму руки для заданной схемы захвата с использованием электроэнергии на этапе предварительного захвата, а мощность тела используется на этапе захвата для выполнения заключительного действия захвата.
Еще одна статья посвящена трансрадиальным протезам конечностей и предлагает сетевой мультимодельный метод управления протезом, имеющим 2 степени свободы запястья и 1 степень свободы кисти. Цель состоит в том, чтобы улучшить управляемость запястья при обработке информации, полученной от движения сустава. Авторы применили модель манипулятивного навыка схватывания, и она ограничена свойствами предплечья, свойствами схватывания объекта и задачей. Экспериментальные результаты подтверждают, что контроля за слиянием достаточно для управления лучезапястным суставом по отношению к положению рабочей плоскости.
Важно иметь адаптивные возможности протеза стопы для выполнения основных движений людей с ампутированными конечностями, которые позволяет делать естественная стопа. Авторы одной статьи провели систематический обзор, чтобы понять концепции дизайна адаптивных протезов стопы с использованием метода PRISMA. Кроме того, они изучили требования и проблемы проектирования адаптивных протезов стопы. Кроме того, адаптивные протезы стопы были классифицированы и сравнены. Авторы предсказали, что будущие адаптивные протезы будут состоять из методов регенеративной энергии и будут более удобными для пользователей.
Кроме того, адаптивные протезы стопы были классифицированы и сравнены. Авторы предсказали, что будущие адаптивные протезы будут состоять из методов регенеративной энергии и будут более удобными для пользователей.
Другая статья посвящена транстибиальному роботизированному протезу конечности. Он представляет двухсуставной транстибиальный протез с электроприводом, который представляет собой комбинацию коммерческого протеза голеностопного сустава с электроприводом и моторизованного роботизированного коленного ортеза. Ортез управляется так, чтобы имитировать икроножную мышцу человека на основе нервно-мышечных моделей соответствующих пациентов без ампутированных конечностей. Авторы сравнивали биартикулярное состояние с моноартикулярным состоянием при условии, что ортез ведет себя как свободный сустав. Экспериментальные результаты, полученные у шести участников с транстибиальной ампутацией, не полностью подтверждают гипотезу авторов о снижении метаболизма у всех участников. Однако у некоторых участников наблюдается значительное снижение метаболизма при биартикулярном состоянии. Из предварительных результатов можно предположить, что искусственная икроножная мышца с электроприводом может обеспечить значительное снижение метаболизма по сравнению с моноартикулярным протезом.
Из предварительных результатов можно предположить, что искусственная икроножная мышца с электроприводом может обеспечить значительное снижение метаболизма по сравнению с моноартикулярным протезом.
Авторы одной из статей разработали и оценили протез, приводящий в движение как коленный, так и голеностопный суставы. В протезе используется квазипассивный коленный ортез с пружинной муфтой, приближающийся к изометрическому поведению биологической икроножной мышцы. Два участника с односторонней транстибиальной ампутацией ходят с протезом на беговой дорожке с инструментами, в то время как данные о движении, силе, электромиографии и метаболических данных собираются и анализируются. Показано, что биартикулярная система снижает импульс момента колена и бедра на пораженной стороне и положительную механическую работу у обоих участников во время фазы сгибания колена в поздней стойке при ходьбе по сравнению с моноартикулярным состоянием. Основываясь на предварительных результатах, авторы предположили, что биартикулярная функциональность может обеспечить преимущества, превосходящие даже самые современные моноартикулярные протезы.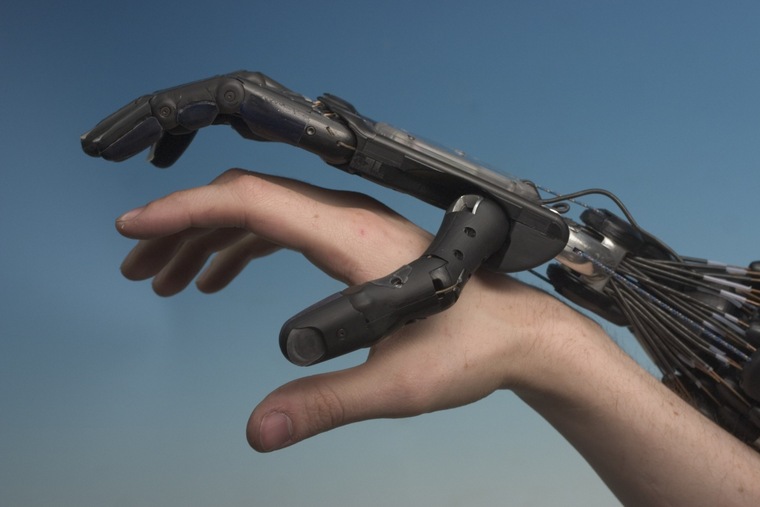
Авторы всех статей подчеркнули как перспективы, так и проблемы, с которыми сталкивается область роботизированных протезов конечностей. В их статьях также указывалось на острую потребность в дополнительных перспективных разработках и управлении роботизированными протезами конечностей. Таким образом, в этом специальном выпуске представлен обзор текущего состояния трансрадиальных и транстибиальных роботизированных протезов конечностей.
Руван Гопура
Кадзуо Кигути
Джордж Манн
Диего Торричелли
Copyright
Copyright © 2018 Ruwan Gopura et al. Это статья с открытым доступом, распространяемая в соответствии с лицензией Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии надлежащего цитирования оригинальной работы.
Сенсорно-моторный синтез
Bionic Arm восстанавливает естественное поведение — проконсультируйтесь с QD
В новом исследовании, опубликованном в журнале Science Robotics , исследовательская группа под руководством Кливлендской клиники сообщает, что она разработала первый в своем роде нейророботизированный протез руки для пациентов. с ампутацией верхних конечностей, что позволяет владельцам думать, вести себя и функционировать как человек без ампутации.
с ампутацией верхних конечностей, что позволяет владельцам думать, вести себя и функционировать как человек без ампутации.
Исследователи разработали бионическую протезную систему, объединяющую три важные функции:
- Интуитивное управление двигателем
- Сенсорный
- Кинестезия захвата, или интуитивное ощущение открытия и закрытия руки
«Мы модифицировали стандартный протез с помощью этой сложной бионической системы, которая позволяет пользователям двигать протезом руки более интуитивно и одновременно чувствовать прикосновение и движение», — говорит Пол Мараско, доктор философии, доцент из Кливленда. Клиника Отделение биомедицинской инженерии Научно-исследовательского института Лернера , , который руководил исследованием вместе с сотрудниками из Университета Альберты и Университета Нью-Брансуика. «Эти результаты являются важным шагом на пути к полному восстановлению естественной функции руки у людей с ампутацией».
[Обновление редактора: за эту работу д-р Мараско получил награду 2022 года за лучшие достижения в области клинических исследований от Форума клинических исследований, некоммерческой ассоциации экспертов в области клинических исследований и лидеров мнений из ведущих академических медицинских центров США. Награды присуждаются за новаторские достижения в клинических исследованиях, которые демонстрируют жизненно важное влияние на лечение пациентов. Узнайте больше здесь.]
Награды присуждаются за новаторские достижения в клинических исследованиях, которые демонстрируют жизненно важное влияние на лечение пациентов. Узнайте больше здесь.]
Три функции, облегчаемые нейро-машинным интерфейсом
Это первая система, которая одновременно тестирует все три сенсорные и моторные функции в нейро-машинном интерфейсе на протезе руки. Замкнутый нейронно-машинный интерфейс соединяется с ампутированными нервами конечностей владельца. Это позволяет пациентам посылать нервные импульсы из мозга в протез, когда они хотят его использовать или двигать, а также получать физическую информацию из окружающей среды и передавать ее обратно в мозг через нервную систему.
Двунаправленная обратная связь и управление нейророботическим протезом позволили участникам исследования выполнять задачи с точностью, аналогичной точности людей без инвалидности.
«Возможно, больше всего нас поразило то, что участники исследования выносили суждения и решения, рассчитывали движения и исправляли ошибки, как люди без ампутации», — отмечает доктор Мараско, руководитель лаборатории бионической интеграции Кливлендской клиники. «С новой бионической конечностью люди вели себя так, как будто у них была естественная рука. Обычно такое поведение мозга сильно различается у людей с протезами верхних конечностей и без них».
«С новой бионической конечностью люди вели себя так, как будто у них была естественная рука. Обычно такое поведение мозга сильно различается у людей с протезами верхних конечностей и без них».
Рекламная политика
Целенаправленная сенсорная и моторная реиннервация
Исследователи протестировали новую бионическую конечность на двух участниках исследования с ампутацией верхней конечности, которые ранее подвергались целенаправленной сенсорной и моторной реиннервации — процедурам, которые создают нейро-машинный интерфейс путем перенаправления ампутированных нервов. к оставшейся коже и мышцам.
При целенаправленной сенсорной реиннервации прикосновение к коже маленькими роботами активирует сенсорные рецепторы, которые позволяют пациентам воспринимать ощущение прикосновения. При целенаправленной моторной реиннервации, когда пациенты думают о движении конечностей, реиннервированные мышцы взаимодействуют с компьютеризированным протезом, чтобы двигаться таким же образом. Кроме того, небольшие мощные роботы вызывают вибрацию кинестетических сенсорных рецепторов в тех же мышцах, помогая владельцу протеза чувствовать, что рука и рука движутся.
Кроме того, небольшие мощные роботы вызывают вибрацию кинестетических сенсорных рецепторов в тех же мышцах, помогая владельцу протеза чувствовать, что рука и рука движутся.
Поведение аналогично поведению неинвалида
Во время ношения усовершенствованного протеза участники выполняли задачи, отражающие повседневное поведение, требующее функциональности кисти и предплечья. С помощью недавно разработанных передовых инструментов оценки исследователи оценили производительность бионической конечности по сравнению с показателями здоровых людей и людей с ампутациями, у которых есть традиционные протезы. Они также сравнили, как люди с передовыми протезами чувствовали себя, когда три сенсорные и моторные модальности были включены вместе, а не по отдельности.
Поскольку люди с традиционными протезами не могут чувствовать конечностями, они ведут себя иначе, чем люди без ампутации, при выполнении рутинных повседневных задач. Например, пользователи традиционных протезов должны постоянно следить за своим протезом во время его использования, и им трудно научиться исправлять ошибки, когда они прилагают слишком много или слишком мало силы рукой.
Используя свои передовые инструменты оценки, исследователи заметили, что мозг и поведенческие стратегии участников исследования изменились, чтобы соответствовать таковым у человека без ампутации (см. видео ниже). «Добавление прикосновения к управлению моторикой позволило участникам больше не следить за своим протезом», — говорит доктор Мараско. «Они могли находить объекты, не глядя, и могли более эффективно исправлять свои ошибки движения».
Рекламная политика
Истоки и потенциальный охват исследования
Настоящее исследование основано на оригинальной статье, опубликованной той же исследовательской группой в Science Translational Medicine в 2018 году, о новом методе восстановления ощущения естественных движений у пациентов.