Бионические роботизированные протезы/ИНЭУМ
ИНЭУМ
Исследования и разработки
Бионические роботизированные протезы
Используя последние достижения в области компьютерных технологий, материаловедения, робототехники, нейрофизиологии, нейропсихологии и нейрореабилитации ПАО «ИНЭУМ им. И.С. Брука» планирует запуск серийного производства передовых отечественных бионических роботизированных протезов (работа выполнена в рамках ФЦП «Развитие фармацевтической и медицинской промышленности Российской Федерации на период до 2020 года и дальнейшую перспективу»).
Медицинский соисполнитель ФБГУ «Приволжский федеральный медицинский исследовательский центр» Минздрава России
БИНК – БИОНИЧЕКАЯ ИНТЕЛЛЕКТУАЛЬНАЯ НИЖНЯЯ КОНЕЧНОСТЬ
БИНК – бионическая интеллектуальная нижняя конечность, не имеющая серийно выпускаемых мировых аналогов, обеспечивающая наиболее полное восполнение функций нижних конечностей, утраченных вследствие ампутации. БИНК является первым полностью активно-ассистивным протезом бедра, в котором реализуется синергетический эффект от совместного применения модуля коленного КИМ-21 и модуля стопы КИМ-10. Наиболее ярко этот эффект выражен при подъеме по лестнице пользователей с короткой культей бедра или c низкими физическими возможностями. При использовании «традиционных» протезов такие пользователи поднимаются по лестнице «приставным» шагом, а в случае использования БИНК возможен нормальный тип движения – попеременный шаг. В фазе переноса сокращается функциональная длина БИНК за счет поднятия носка модуля стопы КИМ-10 и сгибания модуля коленного КИМ-21. При контакте БИНК с поверхностью ступени модуль стопы возвращается в нейтральное положение, а модуль коленный КИМ-21 выполняет активное разгибание, тем самым помогая пользователю подниматься.
БИНК является первым полностью активно-ассистивным протезом бедра, в котором реализуется синергетический эффект от совместного применения модуля коленного КИМ-21 и модуля стопы КИМ-10. Наиболее ярко этот эффект выражен при подъеме по лестнице пользователей с короткой культей бедра или c низкими физическими возможностями. При использовании «традиционных» протезов такие пользователи поднимаются по лестнице «приставным» шагом, а в случае использования БИНК возможен нормальный тип движения – попеременный шаг. В фазе переноса сокращается функциональная длина БИНК за счет поднятия носка модуля стопы КИМ-10 и сгибания модуля коленного КИМ-21. При контакте БИНК с поверхностью ступени модуль стопы возвращается в нейтральное положение, а модуль коленный КИМ-21 выполняет активное разгибание, тем самым помогая пользователю подниматься.
Система управления БИНК гибко сочетает командное управление пользователем и автоматизированное управление, при этом приоритетной задачей является безопасность пользователя. Такое решение дает пользователю возможность не «задумываться» над тем как выполнить движение, но в тоже время дает возможность непосредственно влиять на параметры функционирования своей бионической интеллектуальной конечности.
Такое решение дает пользователю возможность не «задумываться» над тем как выполнить движение, но в тоже время дает возможность непосредственно влиять на параметры функционирования своей бионической интеллектуальной конечности.
Ресурса аккумулятора БИНК хватает на день функционирования в нормальных условиях. В случае разрядки аккумулятора пользователь может оперативно заменить его на запасной, который входит в комплект поставки.
БИНК предназначен для протезирования людей с ампутацией нижних конечностей на уровне бедра и с уровнем активности 2-3.
БИОНИЧЕСКИЙ РОБОТИЗИРОВАННЫЙ МОДУЛЬ КОЛЕНА КИМ-21*
Модуль колена КИМ-21 – шаг вперед в области отечественного протезостроения. В отличие от всех предыдущих коленных модулей, осуществляющих сгибание и разгибание под действием инерционных и внешних сил, КИМ-21 может сгибаться/разгибаться за счет встроенного привода с собственным источником питания, реализуя функции не только коленного сустава, но и функцию мышц сгибателей/разгибателей коленного сустава. В результате пользователь получает активную помощь от модуля коленного КИМ-21 в наиболее сложных для него ситуациях, таких как: подъем по лестнице; вставание из положения сидя; перешагивание препятствий.
В результате пользователь получает активную помощь от модуля коленного КИМ-21 в наиболее сложных для него ситуациях, таких как: подъем по лестнице; вставание из положения сидя; перешагивание препятствий.
Это снижает компенсаторные нагрузки на здоровую конечность, что в свою очередь увеличивает свободу и комфортность передвижений. Для безопасности и комфорта пользователя при длительном стоянии в модуле реализован механизм автоматической блокировки сгибания. Модуль коленный КИМ-21 непрерывно отслеживает скорость движения, тип поверхности и особенности движений пользователя, обеспечивая наиболее естественную походку. При разрядке аккумулятора, КИМ-21 продолжает обеспечивать безопасность передвижения.
Модуль коленный КИМ-21 предназначен для протезирования людей с ампутацией нижних конечностей на уровне бедра и с уровнем активности 2-4.
* КИМ — компьютеризированный интеллектуальный модуль
БИОНИЧЕСКИЙ РОБОТИЗИРОВАННЫЙ МОДУЛЬ КОЛЕНА КИМ-20
КИМ-20 – бионический коленный модуль, сочетающий в себе естественность движений с одной стороны, а с другой стороны невысокую массу и цену.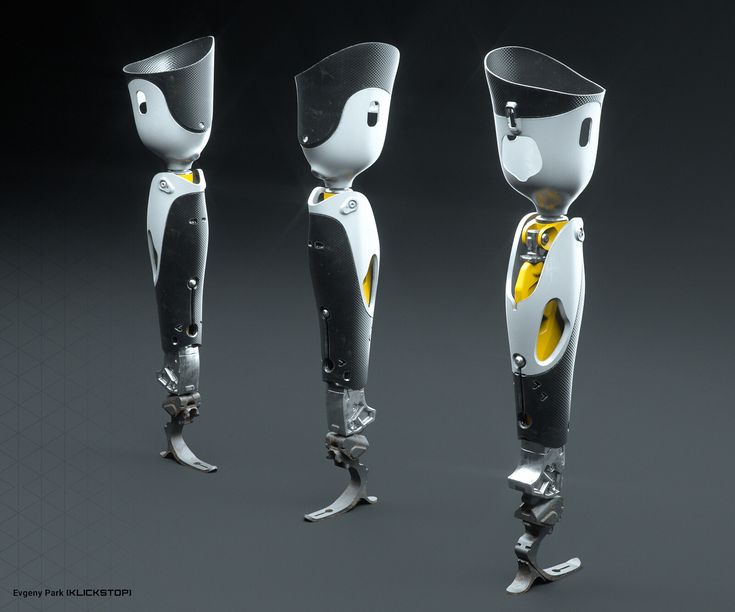 В основе коленного модуля лежит надежное, проверенное временем решение на основе управляемой гидравлики. Интегрированная система управления обеспечивает пользователю защиту от неконтролируемого сгибания в любых условиях. Модуль КИМ-20 может длительное время работать без подзарядки аккумулятора, что дает пользователю широкую свободу перемещений. В случае разрядки аккумулятора модуль перейдет в экономичный режим работы, что позволит пользователю в безопасном режиме добраться до зарядного устройства.
В основе коленного модуля лежит надежное, проверенное временем решение на основе управляемой гидравлики. Интегрированная система управления обеспечивает пользователю защиту от неконтролируемого сгибания в любых условиях. Модуль КИМ-20 может длительное время работать без подзарядки аккумулятора, что дает пользователю широкую свободу перемещений. В случае разрядки аккумулятора модуль перейдет в экономичный режим работы, что позволит пользователю в безопасном режиме добраться до зарядного устройства.
Модуль коленный КИМ-20 предназначен для протезирования людей с ампутацией нижних конечностей на уровне бедра и с уровнем активности 2-4. КИМ-20 полностью совместим с модулем стопы КИМ-10.
БИОНИЧЕСКИЙ РОБОТИЗИРОВАННЫЙ МОДУЛЬ СТОПЫ КИМ-10
КИМ-10 – первый отечественный бионический активно-ассистивный модуль стопы, предназначен для протезирования людей с ампутацией нижних конечностей на уровне голени и бедра и с уровнем активности 2-4. При ходьбе на протезе, в состав которого входит модуль стопы КИМ-10, пользователю в большинстве случаев нет необходимости «задумываться» как ему сделать следующий шаг – композитная стопа обеспечит устойчивость на мелких неровностях поверхности, а встроенный микропроцессор на основании сигналов с датчиков обеспечит изменение угла голеностопного шарнира в соответствии с наклоном опорной поверхности.
При ходьбе на протезе, в состав которого входит модуль стопы КИМ-10, пользователю в большинстве случаев нет необходимости «задумываться» как ему сделать следующий шаг – композитная стопа обеспечит устойчивость на мелких неровностях поверхности, а встроенный микропроцессор на основании сигналов с датчиков обеспечит изменение угла голеностопного шарнира в соответствии с наклоном опорной поверхности.
Применение композитной стопы позволяет эффективно запасать энергию при контакте с поверхностью и отдавать энергию в момент отталкивания, что приводит к снижению затрат энергии пользователя, расходуемой на ходьбу. Модуль КИМ-10 обеспечивает защиту пользователя от спотыкания – в переносной фазе цикла шага осуществляется поднятие носка стопы, аналогично тому, как это происходит у естественной стопы.
КИМ-10 прост и комфортен в эксплуатации. Пользователю больше не нужно беспокоиться при смене обуви – модуль осуществит автоматическую подстройку под высоту каблука. Все это позволяет человеку перенесшему ампутацию нижней конечности наиболее полно вернуться к привычной для него жизни.
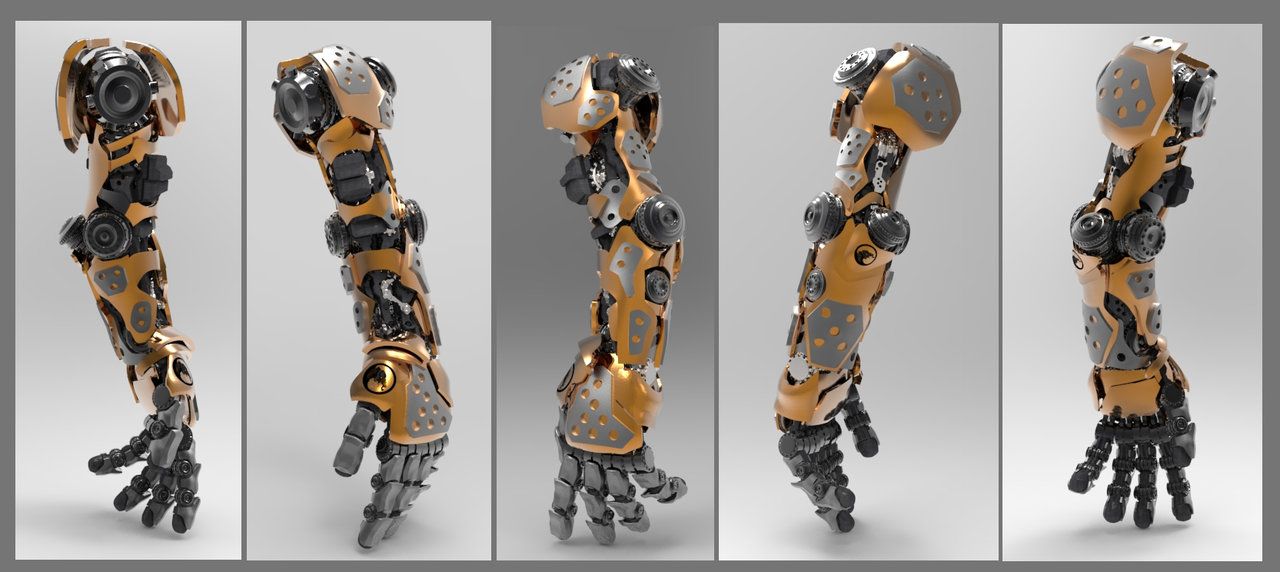
БИОНИЧЕСКИЙ РОБОТИЗИРОВАННЫЙ МОДУЛЬ ЛОКТЯ КИМ-30
Бионический роботизированный модуль локтя КИМ-30 предназначен для протезирования пациентов с ампутацией на уровне плеча. КИМ-30 наиболее полно восстанавливает функции утраченного локтевого сустава. Пользователь осуществляет управление сгибанием и разгибанием КИМ-30, напрягая и расслабляя сохранившиеся мышцы плеча, причем имеет возможность не только осуществить сгибание на определенный угол, но и контролировать скорость перемещения. В движении локтевой модуль практически бесшумен, может «поднимать» груз и обеспечивать бесступенчатую фиксацию с возможностью удержания груза. КИМ-30 обеспечивает защиту пользователя от опасных нагрузок – в случае превышения допустимой нагрузки КИМ-30 осуществляет плавное разгибание/сгибание. Кроме этого КИМ-30 предоставляет пользователю возможность поворота предплечья относительно плеча в ручном режиме. Размеры модуля позволяют его скрыть под косметической оболочкой. Все это обеспечивает пользователю естественность и простоту при эксплуатации модуля локтя КИМ-30.
РЕГУЛИРОВОЧНО-СОЕДИНИТЕЛЬНЫЕ ИЗДЕЛИЯ
Регулировочно-соединительные изделия предназначены для сборки протезов нижних конечностей и подстройки протеза под анатомические особенности пациента. Применяются для протезирования конечностей у пациентов весом до 125 кг и любой группы активности.
|
Адаптеры с двумя гнездами различной длины
|
Пирамидки с фланцем
|
Адаптер регулируемый с двумя гнездами
|
|
Замок для силиконового чехла
|
Поворотные устройства на фланец
|
Гильзовые адаптеры
|
|
Ротатор
|
Адаптер с двумя степенями регулировки
|
Адаптер двусторонний
|
|
Модули несущие
| ||
Код для размещения ссылки на данный материал в блоге:
Бионические роботизированные протезы
Используя последние достижения в области компьютерных технологий, материаловедения, робототехники, нейрофизиологии, нейропсихологии и нейрореабилитации «ИНЭУМ им. И.С. Брука» планирует запуск серийного производства передовых отечественных бионических роботизированных протезов (работа выполнена в рамках ФЦП «Развитие фармацевтической и медицинской промышленности Российской Федерации на период до 2020 года и дальнейшую перспективу»).
И.С. Брука» планирует запуск серийного производства передовых отечественных бионических роботизированных протезов (работа выполнена в рамках ФЦП «Развитие фармацевтической и медицинской промышленности Российской Федерации на период до 2020 года и дальнейшую перспективу»).
ineum.ru
Как будет выглядеть ссылка:
Бионические роботизированные протезы
Используя последние достижения в области компьютерных технологий, материаловедения, робототехники, нейрофизиологии, нейропсихологии и нейрореабилитации «ИНЭУМ им. И.С. Брука» планирует запуск серийного производства передовых отечественных бионических роботизированных протезов (работа выполнена в рамках ФЦП «Развитие фармацевтической и медицинской промышленности Российской Федерации на период до 2020 года и дальнейшую перспективу»).
ineum.ru
Протезы рук со встроенной телеметрией позволяют удалённо устранять проблемы
 org/Article»> org/Article»>3DNews Технологии и рынок IT. Новости манипуляторы, устройства ввода графики Протезы рук со встроенной телеметрией по… Самое интересное в обзорах 17.09.2019 [09:17], Константин Ходаковский В двух регионах России — Иркутске и Башкирии — впервые установили роботизированные протезы рук со встроенной телеметрией, благодаря чему данные о работе функциональных протезов могут транслироваться разработчику и врачу. Это позволит специалистам в режиме реального времени наблюдать за реабилитацией и давать консультации для пользователей. Чтобы адаптироваться к протезу и научиться эффективно им управлять, человеку необходимо пройти курс реабилитации. Встроенная телеметрия делает этот процесс более эффективным и понятным для пользователя. Прежде пациентам приходилось самостоятельно приноравливаться к протезу, лишь время от времени посещая реабилитологов для настройки и адаптации устройства. «Когда ты за много лет научился жить без руки, то решиться на протезирование, а тем более научиться пользоваться устройством, сложно. Но я понимаю, что функциональный протез — это вклад в моё здоровое будущее, без сколиоза и атрофированных мышц. Телереабилитация — это спасательный круг. Я в одном месте, инженеры и реабилитологи в другом, как им объяснить по телефону, например, что у меня что-то не получается или почему что-то не работает? Теперь достаточно доступа в Интернет и всё будет понятно без слов. Я могу быть спокоен, что не выброшу свой протез», — поделился пользователь бионических протезов. Проект по удаленной телеметрии тестируется на бионических протезах компании «Моторика», а в дальнейшем будет доступен для всех технических средств реабилитации. Источник: Если вы заметили ошибку — выделите ее мышью и нажмите CTRL+ENTER. Материалы по теме Постоянный URL: https://3dnews.ru/994136 Рубрики: Теги: ← В |
 Сопряжённые с этим трудности побуждали некоторых людей отказаться от использования протеза. Работа в онлайн-режиме позволяет специалистам дистанционно устранять возникающие сложности в реабилитации и пресекать неисправности.
Сопряжённые с этим трудности побуждали некоторых людей отказаться от использования протеза. Работа в онлайн-режиме позволяет специалистам дистанционно устранять возникающие сложности в реабилитации и пресекать неисправности.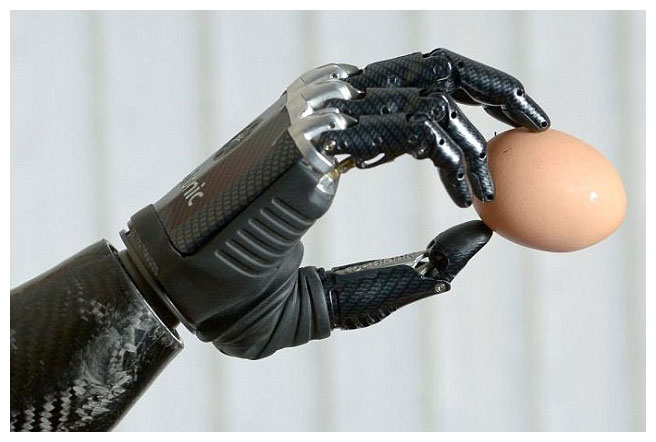 Решение о запуске проекта в Иркутске и Башкирии было принято Фондом социального страхования региона и компанией-разработчиком «Моторика» в октябре 2018 года.
Решение о запуске проекта в Иркутске и Башкирии было принято Фондом социального страхования региона и компанией-разработчиком «Моторика» в октябре 2018 года.Надувная роботизированная рука дает людям с ампутированными конечностями тактильный контроль в реальном времени | Новости Массачусетского технологического института
Для более чем 5 миллионов человек в мире, перенесших ампутацию верхней конечности, протезы прошли долгий путь.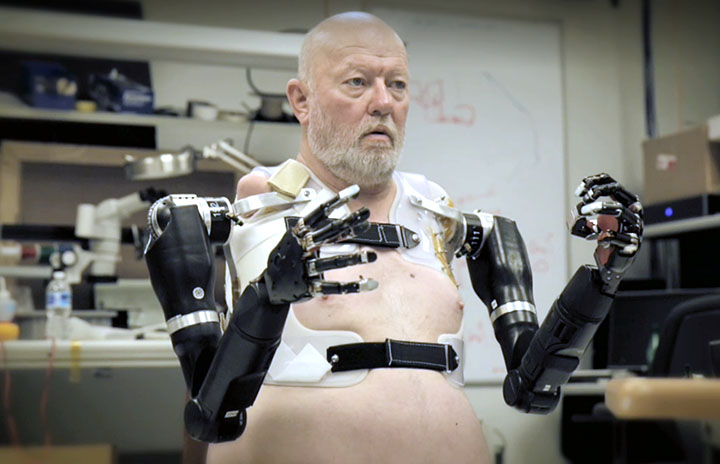 Помимо традиционных придатков, похожих на манекены, растет число коммерческих нейропротезов — высокоподвижных бионических конечностей, спроектированных так, чтобы воспринимать остаточные мышечные сигналы пользователя и роботизированно имитировать их предполагаемые движения.
Помимо традиционных придатков, похожих на манекены, растет число коммерческих нейропротезов — высокоподвижных бионических конечностей, спроектированных так, чтобы воспринимать остаточные мышечные сигналы пользователя и роботизированно имитировать их предполагаемые движения.
Но за эту высокотехнологичную ловкость приходится платить. Нейропротезы могут стоить десятки тысяч долларов и состоят из металлических каркасов с электродвигателями, которые могут быть тяжелыми и жесткими.
Теперь инженеры Массачусетского технологического института и Шанхайского университета Цзяо Тонг разработали мягкий, легкий и потенциально недорогой нейропротез руки. Люди с ампутированными конечностями, которые тестировали искусственную конечность, выполняли повседневные действия, такие как застегивание чемодана, наливание пакета сока и ласкание кошки, так же хорошо, а в некоторых случаях и лучше, чем люди с более жесткими нейропротезами.
Исследователи обнаружили, что протез, разработанный с системой тактильной обратной связи, восстанавливал некоторые примитивные ощущения в культе добровольца. Новый дизайн также удивительно долговечен, быстро восстанавливается после удара молотком или наезда автомобиля.
Новый дизайн также удивительно долговечен, быстро восстанавливается после удара молотком или наезда автомобиля.
Умная рука мягкая и эластичная, весит около полуфунта. Его компоненты стоят около 500 долларов — часть веса и стоимости материалов, связанных с более жесткими умными конечностями.
«Это еще не продукт, но его характеристики уже аналогичны существующим нейропротезам или даже превосходят их, что нас очень радует», — говорит Сюаньхэ Чжао, профессор машиностроения, гражданского и экологического строительства в Массачусетском технологическом институте. «Существует огромный потенциал сделать этот мягкий протез по очень низкой цене для семей с низким доходом, которые пострадали от ампутации».
Чжао и его коллеги опубликовали сегодня свою работу в Nature Biomedical Engineering . В число соавторов входят постдоктор Массачусетского технологического института Шаотин Линь, а также Гуойн Гу, Сянъян Чжу и сотрудники Шанхайского университета Цзяо Тонг в Китае.
Рука Большого Героя
Гибкий новый дизайн команды имеет сверхъестественное сходство с неким надувным роботом из анимационного фильма «Большой герой 6». Как и мягкий андроид, искусственная рука команды сделана из мягкого эластичного материала — в данном случае из коммерческого эластомера EcoFlex. Протез состоит из пяти пальцев, похожих на шары, каждый из которых снабжен сегментами волокна, похожими на сочлененные кости настоящих пальцев. Гибкие пальцы соединены с «ладонью», напечатанной на 3D-принтере, по форме напоминающей человеческую руку.
Вместо того, чтобы управлять каждым пальцем с помощью электромоторов, как в большинстве нейропротезов, исследователи использовали простую пневматическую систему для точного надувания пальцев и их сгибания в определенных положениях. Эту систему, включающую небольшой насос и клапаны, можно носить на талии, что значительно снижает вес протеза.
Лин разработал компьютерную модель, чтобы связать желаемое положение пальца с соответствующим давлением, которое насос должен приложить для достижения этого положения. Используя эту модель, команда разработала контроллер, который направляет пневматическую систему на раздувание пальцев в положениях, которые имитируют пять обычных захватов, включая сжатие двух и трех пальцев вместе, сжатый кулак и сложение ладони.
Используя эту модель, команда разработала контроллер, который направляет пневматическую систему на раздувание пальцев в положениях, которые имитируют пять обычных захватов, включая сжатие двух и трех пальцев вместе, сжатый кулак и сложение ладони.
Пневматическая система получает сигналы от датчиков ЭМГ — датчиков электромиографии, которые измеряют электрические сигналы, генерируемые двигательными нейронами для управления мышцами. Датчики устанавливаются в отверстии протеза, где он крепится к конечности пользователя. При таком расположении датчики могут улавливать сигналы от культи, например, когда человек с ампутированной конечностью представляет, как он сжимает кулак.
Затем команда использовала существующий алгоритм, который «расшифровывает» мышечные сигналы и связывает их с распространенными типами захвата. Они использовали этот алгоритм для программирования контроллера своей пневматической системы. Когда человек с ампутированными конечностями представляет, например, что держит бокал вина, датчики улавливают остаточные мышечные сигналы, которые контроллер затем переводит в соответствующие давления. Затем насос применяет это давление, чтобы надуть каждый палец и создать предполагаемый захват человека с ампутированной конечностью.
Затем насос применяет это давление, чтобы надуть каждый палец и создать предполагаемый захват человека с ампутированной конечностью.
Делая шаг вперед в своем дизайне, исследователи стремились обеспечить тактильную обратную связь — функцию, которая не включена в большинство коммерческих нейропротезов. Для этого они пришили к каждому кончику пальца датчик давления, который при прикосновении или сдавливании выдает электрический сигнал, пропорциональный воспринимаемому давлению. Каждый датчик подключается к определенному месту на культе человека с ампутированной конечностью, поэтому пользователь может «чувствовать», когда протез прижимается, например, к указательному пальцу.
Хорошее сцепление
Чтобы протестировать надувную руку, исследователи привлекли двух добровольцев, у каждого из которых были ампутированы верхние конечности. Получив нейропротез, добровольцы научились его использовать, многократно сокращая мышцы руки, представляя, что делают пять обычных захватов.![]()
После завершения этого 15-минутного обучения добровольцев попросили выполнить ряд стандартных тестов, чтобы продемонстрировать силу и ловкость рук. Эти задачи включали складывание шашек, переворачивание страниц, письмо ручкой, поднятие тяжелых мячей и сбор хрупких предметов, таких как клубника и хлеб. Они повторили те же тесты, используя более жесткую, доступную в продаже бионическую руку, и обнаружили, что надувной протез был так же хорош или даже лучше в большинстве задач по сравнению с его жестким аналогом.
Один доброволец также смог интуитивно использовать мягкий протез в повседневной деятельности, например, есть такие продукты, как крекеры, пирожные и яблоки, а также обращаться с предметами и инструментами, такими как ноутбуки, бутылки, молотки и плоскогубцы. Этот доброволец также мог безопасно манипулировать мягким протезом, например, пожать чью-то руку, прикоснуться к цветку или погладить кошку.
В особенно захватывающем упражнении исследователи завязали глаза добровольцу и обнаружили, что он может различить, какой палец-протез они трогали и трогали.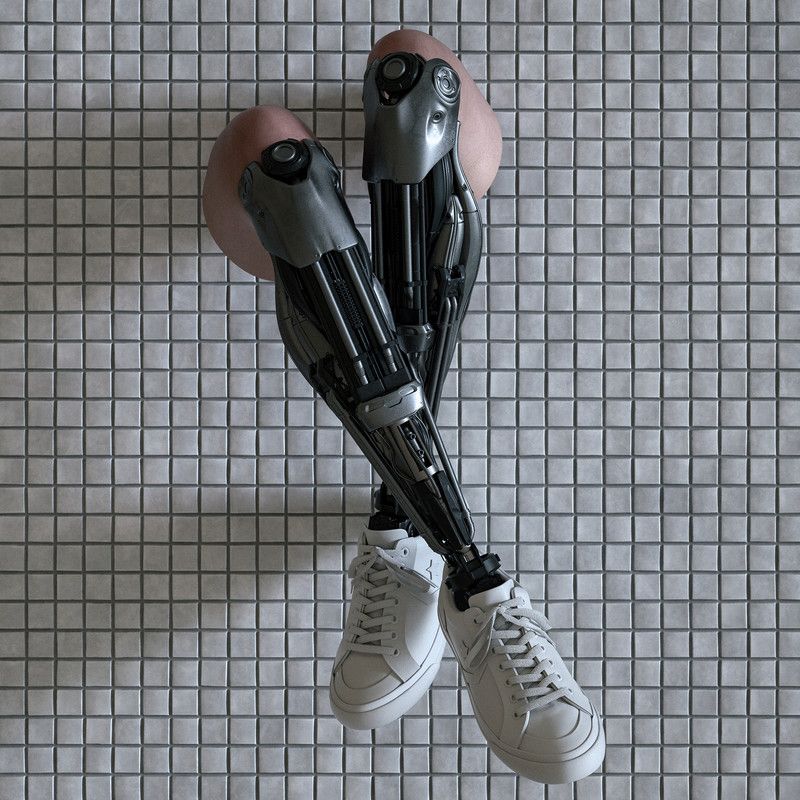 Он также мог «чувствовать» бутылки разного размера, помещенные в протез руки, и поднимать их в ответ. Команда рассматривает эти эксперименты как многообещающий признак того, что люди с ампутированными конечностями могут восстановить ощущение и контроль в реальном времени с помощью надувной руки.
Он также мог «чувствовать» бутылки разного размера, помещенные в протез руки, и поднимать их в ответ. Команда рассматривает эти эксперименты как многообещающий признак того, что люди с ампутированными конечностями могут восстановить ощущение и контроль в реальном времени с помощью надувной руки.
Команда подала патент на конструкцию через Массачусетский технологический институт и работает над улучшением его восприятия и диапазона движения.
«Теперь у нас есть четыре типа захвата. Их может быть больше», — говорит Чжао. «Эту конструкцию можно улучшить с помощью более совершенной технологии декодирования, миоэлектрических массивов более высокой плотности и более компактной помпы, которую можно носить на запястье. Мы также хотим настроить дизайн для массового производства, чтобы мы могли использовать мягкие роботизированные технологии на благо общества».
Роботизированные протезы – состояние готовности
26 сентября 2022 г.
Управляемые разумом бионические конечности больше не кажутся чем-то надуманным. Что потребуется, чтобы донести их до пациентов, которые в них нуждаются?
Что потребуется, чтобы донести их до пациентов, которые в них нуждаются?
По
Аби Миллар
Идея роботизированной конечности может звучать как что-то из научно-фантастического фильма. Эта фраза вызывает в воображении образы сверхразумных киборгов, в которых люди преодолевают ограничения биологии, сливаясь с машинами.
Хотя до этого пока еще далеко, бионические конечности сами по себе больше, чем несбыточная мечта. Все чаще протезирование интегрируется с передовой робототехникой с целью восстановления функциональности здоровой конечности человека.
Эти устройства позволяют пациентам восстановить свои двигательные способности и даже восстановить сенсорную обратную связь, и многие из разрабатываемых устройств управляются разумом.
«Всего несколько лет назад роботизированные протезы могли выполнять только основные задачи, такие как вставание и ходьба с постоянной скоростью в помещении», — говорит профессор Томмазо Ленци, директор лаборатории бионической инженерии в Университете Юты. «Теперь они могут выполнять множество сложных движений, похожих на биологические ноги. Они могут ходить по наклонной или пересеченной местности, подниматься по лестнице, приседать, делать выпады и даже бегать».
«Теперь они могут выполнять множество сложных движений, похожих на биологические ноги. Они могут ходить по наклонной или пересеченной местности, подниматься по лестнице, приседать, делать выпады и даже бегать».
Необходимость подобных устройств не вызывает сомнений. Миллионы людей во всем мире живут с потерей конечностей, часто из-за диабетической невропатии или травмы. Ежегодно в США проводится около 185 000 ампутаций, а в Европе — 431 000.
Качество жизни этих пациентов будет в значительной степени зависеть от качества их протезов. Традиционные пассивные протезы могут дать им некоторую подвижность, но они не могут восстановить естественную функцию мышц и часто ограничивают уровень активности человека.
На сегодняшний день большинство роботизированных протезов находятся на ранних стадиях разработки, а исследовательские прототипы еще не реализованы в коммерческих целях. Однако, как только они достигнут клинической жизнеспособности, они могут действительно изменить жизнь.
От алгоритмов к вспомогательным технологиям
Это сложная и междисциплинарная область, объединяющая, среди прочего, неврологию, робототехнику, вычислительную технику и медицину. В лаборатории AMBER в Калифорнийском технологическом институте ученые используют математические алгоритмы для управления роботизированными устройствами.
«Мы используем базовую математику передвижения вместе с представлениями скелетно-мышечных моделей человека», — говорит профессор Аарон Эймс, руководитель лаборатории AMBER. «Это позволяет автоматически генерировать динамические походки, которые могут быть непосредственно реализованы в виде алгоритмов на роботизированных вспомогательных устройствах».
Тем временем в лаборатории нейробионики Мичиганского университета исследователи выполняют двойную задачу. Помимо разработки носимых роботизированных технологий, они работают над улучшением нашего понимания биомеханики, задавая вопросы о том, как механика конечностей ощущается и регулируется нервной системой.
«Мы изучаем свойства человеческого тела во время ходьбы, — говорит доктор Эллиот Роуз, профессор машиностроения и директор лаборатории нейробионики. «Это включает в себя возмущение сустава, измерение его реакции, а затем характеристику жесткости и демпфирующих свойств. Мы используем это для разработки вспомогательных технологий».
Что касается технологий, в лаборатории есть несколько проектов, в том числе роботизированная нога с открытым исходным кодом. Эта нога может быть легко изготовлена, собрана и управляема, так что исследовательским группам, желающим изучить эти системы, не нужно создавать устройство с нуля.
Они также работают над протезом стопы и голеностопного сустава переменной жесткости, который может изменять свою упругость и амортизирующие свойства от шага к шагу. Другими словами, он регулирует свое поведение в зависимости от условий или уклона, как настоящая лодыжка.
«Потенциально это святой Грааль интеллектуальных протезов, потому что он позволяет не только изменять поведение стопы для различных действий, но и изменять запас энергии, чтобы человек получал кинетическую энергию, возвращаемую ему», — говорит Роуз.
Управление разумом
Классически протезами управляли, двигая другими частями тела или переключая переключатели и кнопки. В более продвинутых протезах устройство интегрируется с нервной системой и управляется с помощью электрических сигналов от нервов и мышц выше места ампутации.
В 2020 году международная группа исследователей сообщила об управляемом разумом протезе руки, который обеспечивает ощущение прикосновения. Устройство напрямую связано с нервами, мышцами и скелетом пользователя и генерирует ощущения, которые воспринимаются как возникающие из-за отсутствия руки.
Совсем недавно группа под руководством Лаборатории прикладной физики Джона Хопкинса достигла важной вехи в своих исследованиях — частично парализованный пользователь смог есть с помощью пары роботизированных рук. Протез был интегрирован с интерфейсом мозг-компьютер, что позволяло человеку маневрировать руками естественным образом и без особого умственного воздействия.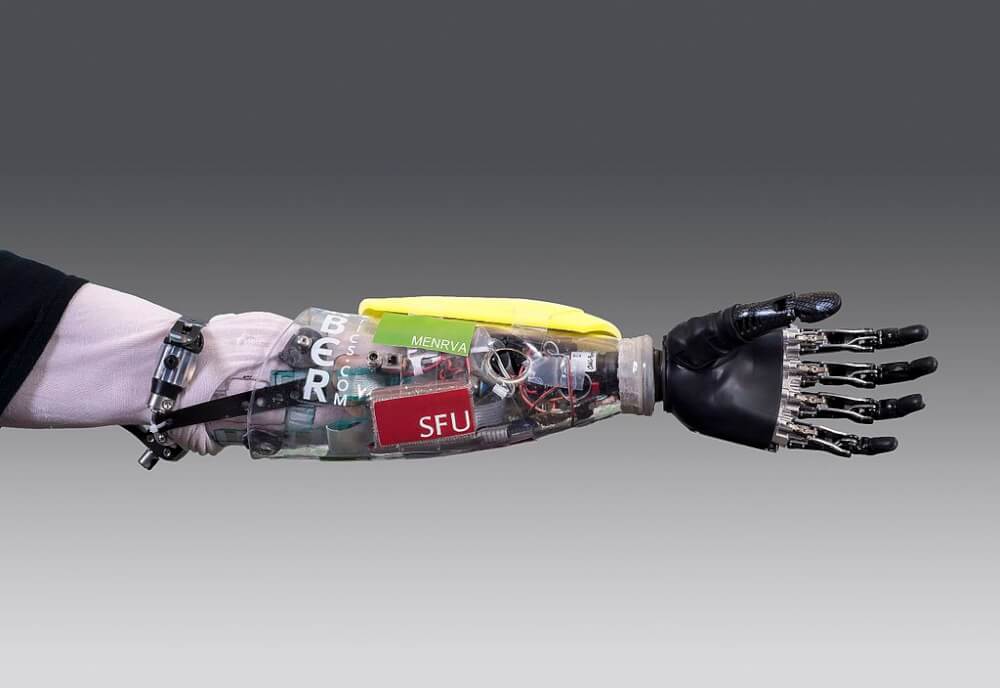
Исследование основано на программе «Революционное протезирование», которая первоначально финансировалась правительством США. Эта программа направлена на создание нейроконтролируемых протезов рук с почти естественными двигательными и сенсорными способностями.
Вообще говоря, устройства для верхних конечностей быстро развиваются, и ряд бионических протезов кисти и предплечья был запущен в коммерческую эксплуатацию. Esper Hand, например, представляет собой самообучающийся бионический протез руки, который становится быстрее и точнее по мере того, как его используют.
Проблемы с протезами ног
Несмотря на шум вокруг бионических рук, Роуз предупреждает, что протезы нижних конечностей отстают. Хотя на рынке уже есть несколько роботизированных протезов ног — одной лодыжки и одного колена — они не показали клинического эффекта, на который можно было бы надеяться. По сравнению с протезами рук, этими устройствами гораздо сложнее управлять.
«За последние 5-10 лет область практически не изменилась, потому что сказать роботизированным протезам ног, что делать, чрезвычайно сложно», — говорит Роуз. «Если они ошибаются на лестнице, риск действительно высок, потому что ноги поддерживают тело. Инструкции, предоставляемые этим системам, должны постоянно точно соответствовать тому, что пользователь пытается сделать, и это действительно высокая планка».
«Если они ошибаются на лестнице, риск действительно высок, потому что ноги поддерживают тело. Инструкции, предоставляемые этим системам, должны постоянно точно соответствовать тому, что пользователь пытается сделать, и это действительно высокая планка».
Он добавляет, что в настоящее время роботизированные протезы ног не используют информацию от человеческого тела — цена недоразумения слишком высока, поэтому вся информация поступает от датчиков на устройстве. В долгосрочной перспективе это должно измениться.
«Я думаю, что наша область действительно нуждается в прямой нейронной связи для управления этими протезами, будь то из центральной или периферической нервной системы», — говорит Роуз. «Это будут кортикальные имплантаты или имплантаты на периферических нервах, которые более четко сообщают нам, что пытается сделать человеческое тело. Есть исследователи по всему миру, которые изучают это».
Например, лаборатория Лензи в Юте стремится разработать более интуитивно понятные стратегии управления протезами ног.
«Мы используем разные подходы для считывания нейронных сигналов, генерируемых нервной системой пользователя, и преобразования их в произвольные движения протеза», — говорит Ленци.
Будущие направления исследований
Помимо контроля, эти системы сталкиваются и с другими проблемами. Большой проблемой является вес — большинство роботизированных протезов все еще слишком тяжелые, чтобы их можно было использовать каждый день. Другое дело власть. Не так давно устройства нужно было привязывать к источнику питания, что препятствовало их использованию в реальных условиях. Даже сегодня у них ограниченное время автономной работы, обычно не более нескольких часов.
«Это неприемлемо, и большинству людей нужен протез, который может работать целый день без подзарядки», — говорит Ленци. «К сожалению, использование аккумуляторов большего размера недопустимо, поскольку они увеличивают вес, что недопустимо».
Еще одна проблема — это шум — роботизированные протезы намного громче, чем их обычные аналоги, — и еще одна проблема — интуитивность.