Содержание
Такие разные роботы… Новинки 2020
Позвонить
+7 (900) 029-50-10 ДЮТТ
+7 (904) 808-60-10 Кванториум Челябинск
+7 (3519) 33-07-37 Кванториум Магнитогорск
+7 (351) 369-08-13 Кванториум Златоуст
+7 (35163) 2-45-85 Кванториум Троицк
+7 (35134) 4-22-81 IT-Куб Южноуральск
+7 951 806 3486 IT-Куб Сатка
+7 (3519) 33-08-08 IT-Куб Магнитогорск
+7 951-787-67-82 IT-Куб Кыштым
+7 (35146) 92 716 IT-Куб Снежинск
+7 9000 670 186 IT-Куб Миасс
+7 (351) 218-11-16 IT-Куб Челябинск
Часто задаваемые вопросы
- Родителям и детям
- Роботы
- Образование
- Техническое творчество
25.11.2020
На Международной выставке бытовой электроники CES 2020 была представлена огромная коллекция удивительных роботов, предназначенных для выполнения практически любых задач — от повседневных домашних забот до воспитания добрых чувств в человеке.
Удивительный робот Ballie от Samsung представляет собой шарообразный предмет, похожий на теннисный мяч, сj множеством датчиков и встроенной камерой. Его движущим механизмом выступает встроенное в корпус колесо. Робот умеет следовать за своим хозяином и реагировать на голосовые запросы, а также перемещаться полностью автономно. Команды роботу можно подавать только с достаточно близкого расстояния или через приложение в смартфоне. Например, робот на демонстрационном видео включил телевизор для собаки, которая находилась одна дома и скучала без хозяина. Все свои действия и движения самой собаки робот передал на смартфон своей владелице. На видео также, шарообразный робот играет с питомцем, а после того, как комната стала грязной, включает «умный» пылесос.
Не менее интересный терапевтический робот Petit Qoboo, созданный Юкай Инжиниринг (Yukai Engineering). Робот-компаньон в виде пушистой терапевтической подушки с выразительным хвостом выглядит, как заменитель кошки. На выставке был представлен прототип.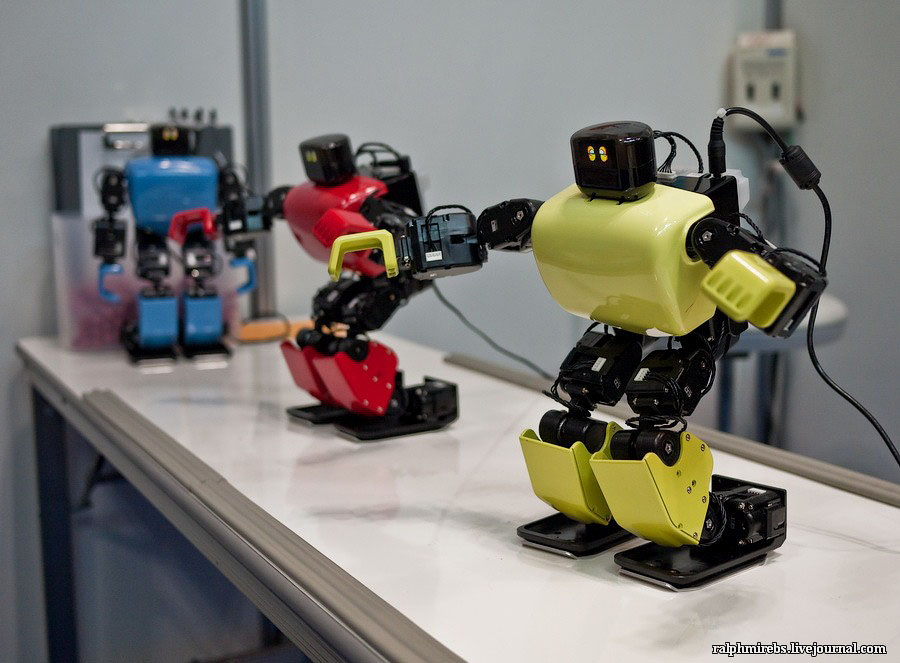 Создатели работают над миниатюрными заменителями кошек, которых можно будет брать с собой на прогулки. Робот будет реагировать на прикосновения и вилять хвостиком, а также можно будет услышать мурчание и легкое серцебиение.
Создатели работают над миниатюрными заменителями кошек, которых можно будет брать с собой на прогулки. Робот будет реагировать на прикосновения и вилять хвостиком, а также можно будет услышать мурчание и легкое серцебиение.
В продолжение темы китайские производители представили робота PuduTech. Это причудливый гибрид кошки и троллейбуса, который принесет вам ужин и позволит погладить его уши. Этот специфический официант может загрузить 10 килограмм. Робокошка-официант PuduTech не простая: у неё есть имя — BellaBot, и даже характер. Милое роботизированное создание мяукает, когда подъезжает к столу, чтобы гость взял свой заказ с подноса. Продукты китайской компании имеют спрос — уже сейчас техникой PuduTech пользуются порядка двух тысяч ресторанов по всему миру.
От французского разработчика Pollen Robotics был представлен новый интерактивный робот с открытым исходным кодом. Трясущиеся антенны робота Reachy (Ричи) делают его похожим на насекомое. Каждая рука гуманоидного робота имеет семь степеней свободы, а специализированный шейный сустав позволяет голове поворачиваться и наклоняться удивительно реалистичным образом. Сама голова робота оснащена камерой, микрофоном и динамиком.
Сама голова робота оснащена камерой, микрофоном и динамиком.
Большая часть бытовых роботов, представленных на выставке, предназначены для обеспечения товарищеских отношений и облегчения чувства одиночества. Новейшие технологии робототехники не перестают удивлять и вызывают восторг людей со всего мира. Трудно представить, какие инновации готовит нам грядущий 2021 год, ждем с нетерпением…
Автор: Хакимова Альбина Талгатовна
Магнитогорские кванторианцы в очередной раз удивили проектом
Магнитогорский «Кванториум» готовится к главной технологической олимпиаде
Антиспам поле. Его необходимо скрыть через css
Ваше имя
Электронная почта
Оценка
Пожалуйста, оцените по 5 бальной шкале
Ваше сообщение
Вам понравилось? Расскажите о своем опыте своим друзьям в социальных сетях. Пусть им понравится тоже!
Роботы.
 От игрушки до Терминатора
От игрушки до Терминатора
Игрушка с часовым механизмом, манипулятор на заводе, домашний питомец и даже врач — это все о роботах. Их прообразами были механические фигурки людей, исполнявших незатейливые действия. Шло время, роботы становились все сложнее, а задачи, для которых их создавали, — все интереснее. Из игрушек они стали помощниками на производстве, виртуозными хирургами, перевозчиками и претендуют на многие другие профессии. Благодаря посольству Великобритании в Москве и Британскому совету в Год науки и образования Великобритании и России мы собрали фотографии роботов с берегов Туманного Альбиона.
Серебряный лебедь, созданный в 1773 году английским мастером Джоном Джозефом Мерлином (John Joseph Merlin) вместе с механиком Джеймсом Коксом (James Cox). Он умеет наклонять шею, осматриваясь в поисках рыбки, и заглатывать ее. На Всемирной выставке в Париже в 1867 году его увидел Марк Твен и позднее описал в очерке «Простаки за границей».
Предтечей роботов были достаточно простые механизмы. Например, итальянские мастера в конце XVI века создали фигурку человека на шарнирах. Вроде бы просто, но без таких манекенов не было бы современных роботов-гуманоидов.
Например, итальянские мастера в конце XVI века создали фигурку человека на шарнирах. Вроде бы просто, но без таких манекенов не было бы современных роботов-гуманоидов.
Развитию роботостроения помогли и часовщики, постоянно усложняя механизмы. Например, созданные в 1540 году часы на дворце Хэмптон-Корт в Лондоне показывали не только время, но еще и месяц, день от начала года, фазы Луны и уровень подъема воды в Темзе.
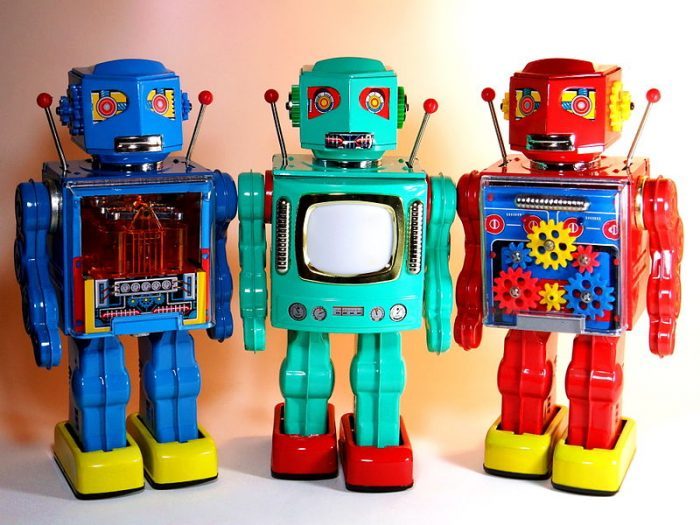
В начале XX века роботы прочно входят в культуру во многом благодаря кинематографу, технологическому скачку и развитию научно-популярного жанра. Они приобретают «каноническую» внешность: у них человекоподобные фигуры, как бы составленные из кубиков, они разноцветные или полностью металлические. Такими были, например, герой саги «Звездные войны» C-3PO («золотой робот») или андроид Мария — героиня антиутопии «Метрополис» (1927 год) немецкого режиссера Фрица Ланга.
Терминатор — один из самых узнаваемых роботов. Хотя на самом деле это не один робот, а целая серия: от гусеничной платформы с пулеметами и гидробота, напоминающего змею или миногу, до киборга T-3000.
«Эрик — робот, человек без души», — так представлялся нью-йоркской публике во время своих «гастролей» в 1929 году первый британский андроид. Его создатели Уильям Ричардс (William Richards) и Алан Реффелл (Alan Reffell) сконструировали Эрика в 1928 году и выгравировали большие буквы R.U.R. ему на груди в честь одноименной научно-фантастической пьесы чешского писателя Карела Чапека, в которой он и ввел в оборот слово «робот».
Эрик умел приветствовать гостей: он вставал из положения сидя, кланялся, затем осматривался по сторонам, шевелил руками и произносил речь. Управляли им два человека, а его «речь» транслировали вживую по радио.
Научить робота ходить оказалось не такой простой задачей. С ней вполне справились создатели Shadow Bipedal (англ. «Двуногая Тень») в 1987 году. Оборудование, отвечающее за движение, прикреплено на деревянный скелет — прочно и недорого.
Этот «одноглазый» красавец — гуманоидный робот ECCEROBOT-2, или, по-домашнему, просто Макс, созданный в лаборатории искусственного интеллекта Университета Цюриха (University of Zurich). На прочный и гибкий скелет «нарощены» механические «сухожилия» и «мускулы», которые при помощи эластичных шнуров и сервопривода имитируют работу этих тканей в организме человека.
На прочный и гибкий скелет «нарощены» механические «сухожилия» и «мускулы», которые при помощи эластичных шнуров и сервопривода имитируют работу этих тканей в организме человека.
Прошло меньше 500 лет между созданием фигурки человека на шарнирах и роботом, чьи кости, мускулы и сухожилия полностью повторяют человеческие.
Роботы бывают похожи не только на людей, но и на животных. Британский робототехник Стив Гранд (Steve Grand) в 2001—2006 годах создал Люси — робота-орангутана. Она учится и программирует себя сама на основе полученного опыта.
Полиглот RoboThespian — робот-гуманоид в человеческий рост, который может изображать человеческую мимику и общаться с людьми в рамках знакомого ему сценария.
Робот с эмоциями — так можно описать Nexi. Созданный в Массачусетском технологическом институте, он обладает очень выразительной мимикой. Кроме того, в Nexi встроены две цветные, одна инфракрасная камеры и несколько микрофонов, так что он всегда поворачивается к собеседнику. Таких внимательных компаньонов среди людей еще поискать.
Таких внимательных компаньонов среди людей еще поискать.
Создатели Pepper продвинулись дальше. Этот робот не только может показывать разные эмоции на «лице», но и распознавать их у человека. В его рот и голову встроены две камеры, в глаза — сенсоры расстояния, а еще датчики прикосновения — в голову и ладони. Укомплектованный всем этим, Pepper может распознавать тон человека, анализировать эмоции и реагировать на них.
Zeno 25R, несмотря на свои скромные габариты — его высота около полуметра, — довольно сложный робот. Он умеет распознавать эмоции, как Pepper, а еще может рассказать историю или шутку, которую найдет в интернете, умеет отвечать на вопросы и даже двигаться в такт музыке.
Робототехника уже прошла путь от простых шарниров к имитации работы мышц и сухожилий, от кукол со встроенными динамиками до собеседников, реагирующих на ваши эмоции. Возможно, в ближайшем будущем роботы смогут строить себя и менять свою архитектуру сами. Как вариант — за счет таких сочленений.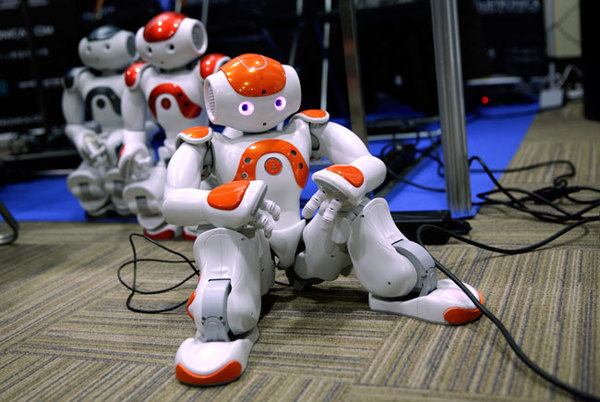
Пожалуй, один из самых симпатичных роботов — это MiRos, или роботизированное домашнее «животное». Этот малыш любит, когда его гладят, — на прикосновения он подставляет уши или спину, склоняет голову, прикрывает глаза и нежно пищит. Кроме того, он ориентируется в пространстве как на основании визуальных датчиков, так и по звуку, например по голосу хозяина.
Робот-ребенок iCub создан для исследования когнитивных функций у человека и усложнения таковых у роботов. Можно сказать, что этот гуманоидный механизм любопытен, почти как ребенок.
Поле зрения iCub совсем небольшое: он «видит» сектор стола перед собой и два объекта на нем. Механический ребенок смотрит на оба, по мере их изучения в нем «копится любопытство». Когда оно переполняет робота, то iCub берет в руку одну из игрушек и спрашивает у оператора, что это.
Узнав название, малыш повторяет его и ставит игрушку на место. Но после этого он тоже не может сидеть спокойно и через несколько мгновений не сможет удержаться, чтобы не похвастаться новым знанием.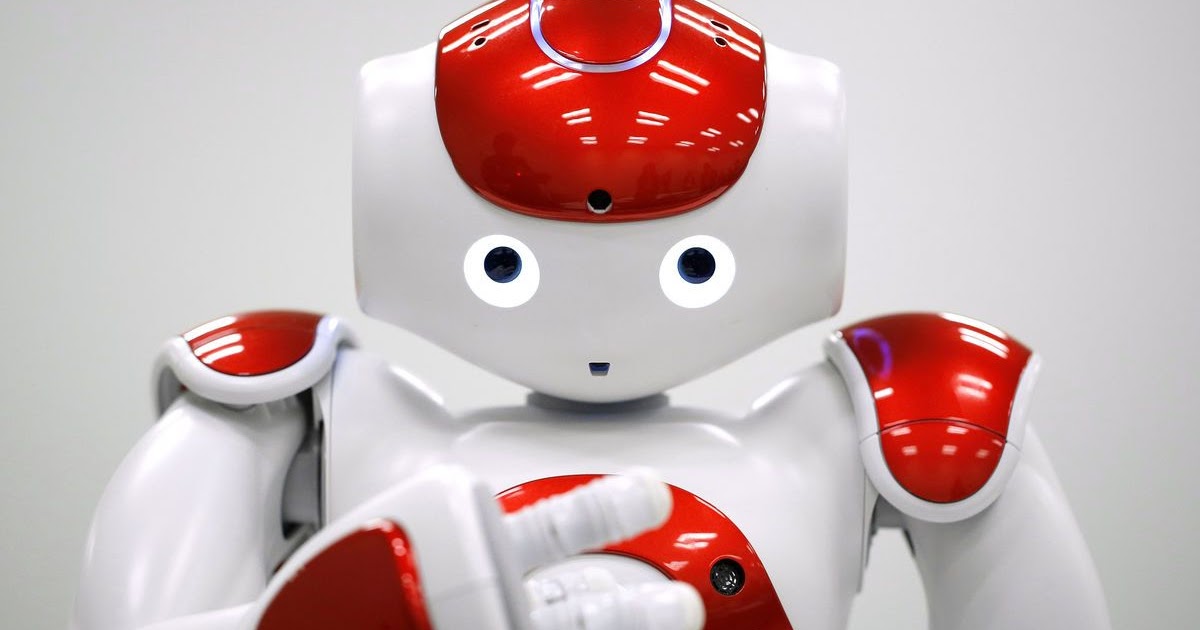 «Я могу показать на панду», — объявит iCub и укажет на нее.
«Я могу показать на панду», — объявит iCub и укажет на нее.
Правда, пока что iCub умеет «узнавать» панду, если ее ракурс не изменился. Стоит поставить ее спиной к роботу или положить на бок, iCub снова спросит, что это.
На примере крошек Kilobot исследователи изучают коллективное поведение множеств. У каждого такого робота есть программируемый микроконтроллер, он может передвигаться и «общаться» с сородичами.
Фотографии: Алиса Веселкова / «Чердак».
Алиса Веселкова
15 различных типов роботов | Объяснение
Искусственный интеллект (ИИ) и робототехника, несомненно, являются двумя наиболее многообещающими областями исследований в настоящее время. Эти двое, безусловно, определят будущее человечества.
В настоящее время у нас есть ультрасовременные машины с элегантным дизайном и гибкими и высокопроизводительными корпусами, которые могут эффективно выполнять широкий спектр задач. У нас также есть искусственный интеллект, который буквально революционизирует то, как мы выполняем большую часть нашей работы.
Хотя ИИ всегда интересная тема для разговора, как мы это делали бесчисленное количество раз здесь, на нашем веб-сайте, давайте сегодня поговорим о роботах. Как вы, возможно, знаете, существует множество различных способов различения роботов. Я уверен, что вы знаете по крайней мере некоторые из них, но их всегда больше.
По сути, роботов можно разделить на две широкие категории: в зависимости от их применения и кинематики или передвижения.
Ниже мы классифицировали роботов только по кинематике. Почему это так? Ну а применение любого предмета, тем более роботов, невнятно описывает его характеристики. Например, два разных типа роботов могут выполнять одну и ту же работу с одинаковым результатом.
Мы упомянули только основные типы роботов, которые далее подразделяются на основе кинематики.
Роботы-манипуляторы или стационарные роботы
1. Декартовы роботы
Изображение предоставлено: Florian Schäffer/ Реализация декартова робота
Декартовы роботы, возможно, являются наиболее распространенным типом роботов, используемых как в промышленных, так и в коммерческих целях.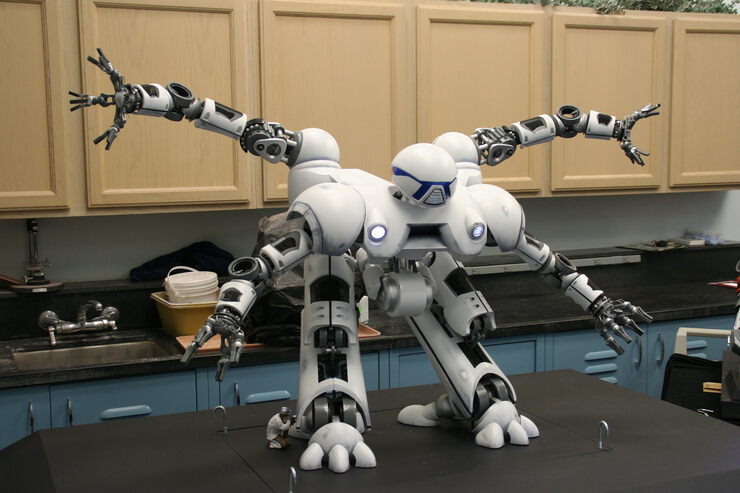 Иногда их называют портальными роботами, они имеют три линейные оси (что означает, что они могут двигаться только по прямым линиям) и установлены под прямым углом. Механическое устройство декартовых роботов намного проще, чем у большинства других стационарных роботов.
Иногда их называют портальными роботами, они имеют три линейные оси (что означает, что они могут двигаться только по прямым линиям) и установлены под прямым углом. Механическое устройство декартовых роботов намного проще, чем у большинства других стационарных роботов.
2. Цилиндрический робот
Цилиндрические роботы обычно используются для сборки, точечной сварки и машинного литья под давлением. Хотя эти типы роботов относительно редки в наши дни, они все же могут быть полезны. Как следует из названия, он образует цилиндрическую рабочую систему координат.
Как видно на схеме выше, цилиндрический робот имеет три оси движения. По оси Z он вращается и перемещается по вертикали; а по оси Y он движется прямолинейно. Иногда этих цилиндрических роботов ошибочно принимают за роботов SCARA или наоборот. Несмотря на то, что их рабочая область почти одинакова, их структура и область применения совершенно разные.
3. Роботы SCARA
Источник Gif: Wikimedia Commons
SCARA или Сборка с селективным соответствием/шарнирная рука робота чаще используется для сборки во всем мире благодаря простоте и беспрепятственной установке.
SCARA Роботы обычно имеют то, что мы знаем как последовательную архитектуру, где один базовый двигатель должен нести все остальные установленные двигатели. Одним из недостатков этих типов роботов является то, что они чрезвычайно дороги по сравнению с обычными декартовыми роботами. Кроме того, для работы им необходимо сложное программное обеспечение высокого уровня.
4. Параллельные роботы
Параллельные роботы более известны как параллельные манипуляторы, в которых группа управляемых машинами роботизированных цепей поддерживает концевой эффектор (или просто концевую платформу). Одним из лучших примеров роботов этого типа являются авиасимуляторы, которые военные и коммерческие пилоты используют для улучшения своих летных способностей путем имитации реальных ситуаций.
Слово «параллельный» не следует понимать неправильно, поскольку оно подразумевает не геометрическую настройку, а скорее уникальную характеристику типа робота в компьютерных науках. Здесь параллель означает, что конечная точка каждой отдельной связи полностью отличается от других.
Здесь параллель означает, что конечная точка каждой отдельной связи полностью отличается от других.
Параллельный робот специально разработан, чтобы оставаться жестким и противостоять всем нежелательным возмущениям и движениям, в отличие от последовательных роботов-манипуляторов. Несмотря на то, что каждый привод работает с определенной степенью свободы, его гибкость в конечном итоге ограничивается другими приводами. Его жесткость и жесткость отличают параллельные манипуляторы от последовательных цепных роботов.
5. Сочлененные роботы
Когда кто-то говорит о промышленных роботах, велика вероятность, что он имеет в виду шарнирных роботов. Эти роботы чрезвычайно универсальны и хорошо подходят для промышленных работ, в отличие от большинства других типов роботов, которые мы показали выше. Эта маневренность и универсальность обусловлены их дополнительными осями, которых обычно от четырех до шести, но также может достигать 10. Их основными областями применения являются погрузочно-разгрузочные работы, дозирование и сварка.
6. Сферические роботы
Изображение предоставлено Seelio.com
По уровню сложности сферические роботы находятся где-то между декартовыми или цилиндрическими роботами и сверхсложными шарнирными роботами. По сути, сферический робот — это робот среднего размера внутри сферического шара, который движется с помощью IDU (внутреннего привода). Эти мобильные сферические роботы чрезвычайно эффективны в миссиях по наблюдению и мониторингу, а также могут использоваться под водой.
Колесные и ножные роботы
7. Одноколесные роботы
Все мы хоть раз ездили на велосипеде или мотоцикле, но сколько из вас катались на одноколесном велосипеде? Ну, я попробовал это однажды; Я даже не мог нормально сесть. Проблема в том, что одноколесные велосипеды не являются устойчивыми, как велосипеды, поэтому их трудно уравновесить, и без надлежащей поддержки можно мгновенно упасть.
Создание одноколесного робота представляет собой сложную задачу для инженеров, поскольку они должны сделать его динамически стабильным, а также эффективным.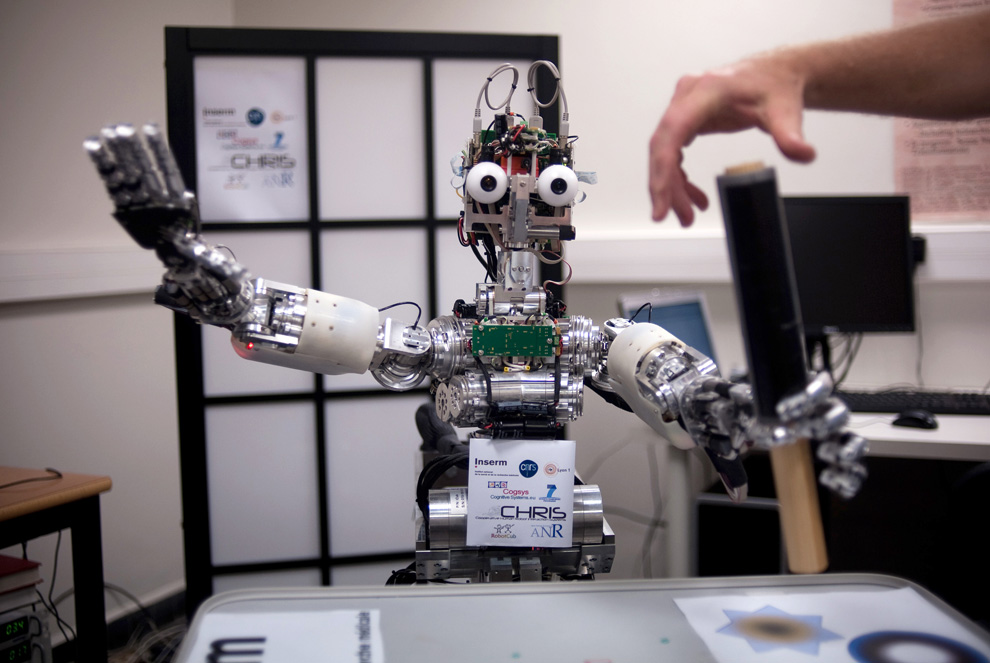 Одним из таких примеров одноколесного робота является MURATA GIRL.
Одним из таких примеров одноколесного робота является MURATA GIRL.
Девушка Мурата, или Мурата Сейко-тян, — робот-одноколесный велосипед, производимый японской компанией по производству электроники Murata. По данным компании, у нее есть усовершенствованные гироскопические датчики, позволяющие ей удерживать равновесие, устройство Bluetooth для связи и ультразвуковой датчик для обнаружения целей. Эти типы компактных роботов могут пригодиться в людных местах.
8. Двухколесные роботы
Изображение предоставлено Дэвидом П. Андерсоном
Хотите создавать собственных роботов? Если да, то маленькие двухколесные роботы, возможно, являются для вас правильным началом. Их простая и эффективная конструкция является причиной того, что в настоящее время широко распространены двухколесные роботы. Все, что вам нужно, это пара моторов и два колеса, чтобы передвигаться.
Но, как и у любого другого робота, у них тоже есть свои недостатки. У двухколесных роботов плохой баланс, так как они используют только два колеса с каждой стороны, и им всегда приходится находиться в движении, чтобы поддерживать вертикальное положение. Чтобы сделать его более устойчивым, батареи установлены прямо под их корпусом.
Чтобы сделать его более устойчивым, батареи установлены прямо под их корпусом.
9. Трехколесные роботы
Трехколесные роботы можно разделить на два типа в зависимости от характера управляемых колес. В первом типе два колеса имеют отдельный привод, а третье колесо свободно вращается для балансировки (дифференциально управляемое). Во втором типе два колеса питаются от одного источника, а третье колесо питается от другого источника.
Для трехколесных роботов с дифференциальным управлением направление движения робота в данный момент времени можно изменить, изменив относительную скорость вращения двух приводных колес. Когда два колеса имеют одинаковую скорость вращения и одинаковое направление, робот продолжает двигаться прямо.
10. Роботы-гуманоиды
TOPIO, робот-гуманоид, играл Т.Т. на IREX, Токио
Как следует из названия, робот-гуманоид — это тип робота, копирующий человеческое тело. Дизайн роботов-гуманоидов — это то, что отличает их от других типов мобильных роботов.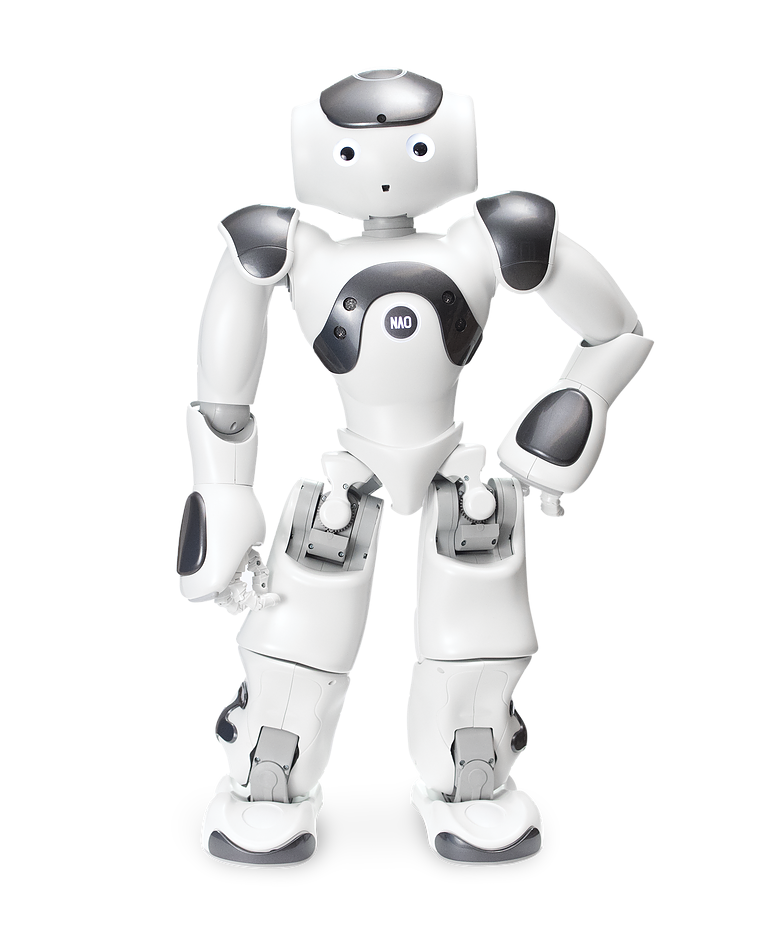 Типичный робот-гуманоид состоит из головы, двух рук, туловища и двух ног, как человек.
Типичный робот-гуманоид состоит из головы, двух рук, туловища и двух ног, как человек.
Они предназначены для выполнения определенных работ, таких как инспекция и ликвидация последствий стихийных бедствий на электростанциях, рутинные задачи космонавтов в космических путешествиях, а также личная помощь и уход.
Прочтите: 12 Усовершенствованные роботы-животные, которые меняют научные исследования
Одним из основных компонентов робота-гуманоида являются датчики, которые играют ключевую роль в парадигмах робототехники. Существует два типа сенсоров: проприоцептивные и экстероцептивные сенсоры. Первый отвечает за ориентацию, положение и другие двигательные навыки робота, а второй включает в себя датчики зрения и звука.
11. Трехногие и четвероногие роботы
WildCat от Boston Dynamics
Хотя трехногие или трехногие роботы встречаются не так часто, лаборатория робототехники и механизмов в Вирджинии разработала радикального трехногого робота по имени STriDER. Он использует довольно новую концепцию пассивной динамической локомоции для ходьбы во всех направлениях. Этот высокоэффективный робот также может управляться с минимальным контролем.
Он использует довольно новую концепцию пассивной динамической локомоции для ходьбы во всех направлениях. Этот высокоэффективный робот также может управляться с минимальным контролем.
В отличие от трехногих роботов более популярны четвероногие роботы. Четвероногие роботы, также известные как четвероногие роботы, обладают большей устойчивостью, особенно когда они не находятся в движении. Многие четвероногие роботы используют технику чередования (в парах) для ходьбы.
Одними из лучших примеров четвероногих роботов являются WildCat, Cheetah и Big Dog.
12. Шестиногие роботы
В геометрии шестиугольник подразумевает шестиугольник, поэтому шестиногий робот означает робота с шестью ногами, верно? Да, это тот случай. Хотя робот может быть совершенно устойчивым всего на трех ногах, дополнительные ноги шестиногих роботов обеспечивают большую гибкость и расширяют его возможности.
Дизайн многих, если не всех шестиногих, вдохновлен передвижением семейства насекомых Hexapoda (по-гречески «6-ногие»). Они также используются для проверки различных биологических теорий о передвижении и управлении движением насекомых. Эти гексаподы используют различные типы походки, чтобы двигаться. Наиболее распространены:
Они также используются для проверки различных биологических теорий о передвижении и управлении движением насекомых. Эти гексаподы используют различные типы походки, чтобы двигаться. Наиболее распространены:
- Сменный штатив : из шести возможных, только три ноги остаются на земле одновременно
- Ползание : только одна нога остается на земле одновременно, создавая впечатление ползания
13. Гибридный робот
У нас были роботы с ногами и роботы с колесами, но Boston Dynamics, робототехническая компания, выпустила исследовательского робота по имени Handle, который может достигать высоты до 6,5 футов и перемещаться на короткие расстояния со скоростью 9 миль в час. Он также может прыгать вертикально на высоту до 4 футов
Несмотря на то, что у него есть все основные принципы работы четвероногого робота (такие как равновесие и подвижные манипуляции), он использует только десять приводных суставов. Поэтому он намного проще, чем другие шагающие роботы. С колесами (эффективны на плоском газоне) и ногами (эффективны на пересеченной местности) «Ручка» может справиться со всем, что в него бросят.
С колесами (эффективны на плоском газоне) и ногами (эффективны на пересеченной местности) «Ручка» может справиться со всем, что в него бросят.
14. Летающие роботы
Изображение предоставлено Ted Talks
Как сильно вы этого ждали? Мне тоже не терпелось это написать.
Без тени сомнения, летающие роботы являются самыми популярными типами роботов. Прямо сейчас некоторые крупные транснациональные компании планируют внедрить эти автоматические летательные аппараты в свой повседневный бизнес. Эти роботы не просто крутые; они также прочны и аэродинамически надежны.
В некоторых регионах Amazon начала доставлять товары с помощью летающих дронов. Эти полностью электрические и автономные дроны могут летать на расстояние до 15 миль и доставлять посылки весом 5 фунтов менее чем за 30 минут.
Прочтите: 14 уникальных ранних экспериментальных летающих самолетов
15. Плавающие роботы
И почему летающие роботы должны быть в центре внимания; почему не плавающие роботы? Да, они такие же крутые, как летающие роботы; разница только в том, что они не летают, а плавают. Эти роботы могут принимать форму насекомых, рыб или больших скользящих змей.
Эти роботы могут принимать форму насекомых, рыб или больших скользящих змей.
Одним из таких уникальных роботов является НАСА SWIM (сокращение от Sensing With Independent Micro-Swimmers). Это робот размером со смартфон, способный плавать по океанам и спускаться сквозь ледяную оболочку далекой луны в поисках внеземной жизни. Он может охватывать большие водные области по сравнению с одиночным зондом.
Дополнительная информация
Каковы наиболее распространенные способы использования роботов-гуманоидов?
Помимо личной помощи и ухода человекоподобные роботы используются в качестве исследовательских инструментов в различных областях науки, включая биомеханику и когнитивную науку. На их основе разрабатываются сложные протезы для людей с ограниченными возможностями и персонализированные медицинские средства для пожилых людей.
В индустрии развлечений роботы-гуманоиды служат дублерами. Некоторые роботы были специально созданы для имитации реального динамического движения.
В настоящее время эти роботы могут выполнять только определенные задачи и далеко не автономны. Многие практические приложения до сих пор не изучены.
В будущем такие роботы (интегрированные с технологией искусственного интеллекта) могут быть полезны для миссий по исследованию космоса — нам не нужно возвращать их на Землю после завершения миссии.
Кто разработал первых автономных роботов?
В 1948 году британский нейрофизиолог Уильям Грей Уолтер разработал первого электронного автономного робота со сложным поведением. Он назвал его Элмер.
Из-за своей структуры и низкой скорости передвижения его часто называют трехколесным роботом-черепахой. Он был способен найти свой собственный путь к зарядной станции, когда у него заканчивался заряд батареи.
Какие роботы самые известные?
- Spot: Проворный мобильный робот, который может перемещаться по местности с исключительной мобильностью.
- София: робот-гуманоид, который следит за лицами, устанавливает зрительный контакт и распознает людей.

- AIBO: роботизированная собака, которая может распознавать лица, отвечать на голосовые команды и обучаться трюкам с помощью облачных вычислений.
- Stretch: коммерческий складской робот, который может работать с упаковками различных типов, размеров и конфигураций штабелирования.

Объем рынка робототехники
Согласно отчету, опубликованному в Precedence Research, к 2030 году объем мирового рынка робототехники превысит 225,6 млрд долларов, а среднегодовой темп роста в период с 2022 по 2030 год составит 12,3%.
Основной фактор роста включает в себя растущий спрос на промышленных роботов, которые помогают в обработке материалов, производстве, сварке, упаковке и маркировке, а также в обеспечении безопасности и инспекции. Кроме того, рост финансирования и инвестиций в области робототехники и машинного обучения также стимулирует развитие этого рынка по всему миру.
Подробнее
17 различных типов автомобильных двигателей | Объяснение
13 лучших робототехнических компаний в мире
4 типа роботов, которые должен знать каждый производитель
Первоначально эта статья была опубликована в IndustryWeek. Запись в гостевом блоге Мэтта Миннера, старшего консультанта по техническим услугам компании Catalyst Connection, входящей в национальную сеть MEP TM .
Запись в гостевом блоге Мэтта Миннера, старшего консультанта по техническим услугам компании Catalyst Connection, входящей в национальную сеть MEP TM .
В настоящее время в производственном секторе много говорят о роботах и о том, как они могут помочь производителям решить некоторые проблемы, с которыми они сталкиваются на современном рынке, такие как повышение производительности и нехватка квалифицированных рабочих.
Но что именно имеют в виду аналитики и специалисты по автоматизации, когда используют слово «робот»? И как различные типы роботов могут улучшить реальную производственную операцию? Если вы небольшой производитель, который интересуется роботами, но никогда с ними не работал, вам может быть сложно представить, как роботы могут вписаться в ваше предприятие. Вот обзор четырех типов промышленных роботов, о которых должен знать каждый производитель.
1. Шарнирные роботы
Шарнирно-сочлененный робот — это тип робота, который приходит на ум, когда большинство людей думают о роботах. Подобно фрезерным станкам с ЧПУ, шарнирные роботы классифицируются по количеству точек вращения или осей, которые они имеют. Наиболее распространенным является 6-осевой шарнирный робот. На рынке также есть 4- и 7-осевые устройства.
Подобно фрезерным станкам с ЧПУ, шарнирные роботы классифицируются по количеству точек вращения или осей, которые они имеют. Наиболее распространенным является 6-осевой шарнирный робот. На рынке также есть 4- и 7-осевые устройства.
Гибкость, ловкость и досягаемость делают шарнирных роботов идеально подходящими для задач, охватывающих непараллельные плоскости, таких как обслуживание машин. Шарнирные роботы также могут легко добраться до отсека станка и под препятствиями, чтобы получить доступ к заготовке (или даже обойти препятствие, в случае 7-осевого робота).
Герметичные соединения и защитные рукава позволяют шарнирным роботам работать как в чистой, так и в грязной среде. Возможность установки шарнирно-сочлененного робота на любую поверхность (например, на потолок, направляющую) обеспечивает широкий спектр рабочих возможностей.
Сложность шарнирного робота связана с более высокой стоимостью по сравнению с другими типами роботов с аналогичной полезной нагрузкой. А шарнирные роботы менее подходят, чем другие типы роботов, для очень высокоскоростных приложений из-за их более сложной кинематики и относительно большей массы компонентов.
А шарнирные роботы менее подходят, чем другие типы роботов, для очень высокоскоростных приложений из-за их более сложной кинематики и относительно большей массы компонентов.
2. Роботы SCARA
Шарнирный робот-манипулятор с селективным соответствием требованиям (SCARA) является хорошим и экономичным выбором для выполнения операций между двумя параллельными плоскостями (например, перемещение деталей с лотка на конвейер). Роботы SCARA превосходно справляются с задачами вертикальной сборки, такими как вставка штифтов без заеданий, благодаря своей вертикальной жесткости.
Роботы SCARA легкие и занимают мало места, что делает их идеальными для использования в местах большого скопления людей. Они также способны к очень быстрому времени цикла.
Из-за конструкции с фиксированным поворотным рычагом, которая является преимуществом в определенных областях применения, роботы SCARA сталкиваются с ограничениями, когда речь идет о задачах, требующих обхода или доступа внутрь таких объектов, как приспособления, приспособления или станки в рабочей ячейке.
3. Роботы Delta
Роботы Delta, также называемые «роботами-пауками», используют три двигателя на основании для приведения в действие рычагов управления, которые позиционируют запястье. Базовые дельта-роботы представляют собой 3-осевые устройства, но также доступны 4- и 6-осевые модели.
За счет установки приводов на стационарное основание или очень близко к нему, а не на каждое сочленение (как в случае шарнирного робота), рука дельта-робота может быть очень легкой. Это позволяет быстро перемещаться, что делает дельта-роботы идеальными для очень высокоскоростных операций с легкими нагрузками.
Важно отметить, что при сравнении дельта-роботов с другими типами роботов: досягаемость дельта-роботов обычно определяется диаметром рабочего диапазона, а не радиусом от основания, как в случае шарнирно-сочлененных блоков и блоков SCARA. . Например, дельта-робот с радиусом действия 40 дюймов будет иметь вдвое меньший радиус действия (20 дюймов по радиусу) по сравнению с 40-дюймовым сочлененным роботом или роботом SCARA.
4. Декартовы роботы
Декартовы роботы обычно состоят из трех или более линейных приводов, собранных для конкретного применения. Декартовы роботы, расположенные над рабочим пространством, могут быть подняты, чтобы максимизировать площадь пола и приспособить широкий диапазон размеров заготовок. (При размещении на приподнятой конструкции, подвешенной на двух параллельных рельсах, декартовы роботы называются «портальными роботами».)
Декартовы роботы обычно используют стандартные линейные приводы и монтажные кронштейны, что сводит к минимуму стоимость и сложность любой «нестандартной» декартовой системы. . Блоки большей производительности также можно интегрировать с другими роботами (например, роботами с шарнирно-сочлененной рамой) в качестве «конечных эффекторов» для расширения возможностей системы. Тем не менее, нестандартный характер декартовых роботов может сделать проектирование, спецификацию и программирование сложными или недоступными для небольших производителей, стремящихся к подходу «сделай сам» к внедрению робототехники.