Содержание
Atlas
- Главная
- Новости
- Статьи
- Шум
- Арт
- Robo-педия
- Роботы в России
- Встречи
Robo-педия Модели, устройства
Алексей Бойко (ABloud)
Смотрите связанные статьи Robo-педии:
- Boston Dynamics
- Гуманоидные роботы
- Ходящие (шагающие) роботы
Robo-педия
- Главная страница
- Все статьи (А-Я)
- Разделы, группы
- Термины, понятия
- Компании, бренды
- Модели, устройства
Публикации
- Все публикации
- Robo-Новости
- Robo-Статьи
- Robo-Шум
- Robo-Арт
Последние материалы
- Компания Taiwan Drone 100 считает дизайн контента ключом к успешным групповым выступлениям
- Завершены летные испытания конвертоплана Д-20К компании Аэромакс
- Solix Sprayer: автономный робот для точечного опрыскивания сорняков
- Дроны показали свой потенциал в 3D-строительстве
- Грузовой дрон PW.
 Orca: 15 кг, 110 км/ч
Orca: 15 кг, 110 км/ч - Lockheed Martin вложили $100 млн в разработку связки F-35 и ведомых БЛА
- HP представил робота для разметки чертежей на стройплощадке
- Silent Ventus продержался в воздухе 4.5 минуты
- Дроны: глаза “физического интернета”
- Наземные робокурьеры: инфраструктура не готова?
 Orca: 15 кг, 110 км/ч
Orca: 15 кг, 110 км/чМетки
AGV ai DARPA DIY DIY (своими руками) DJI Lely pick-and-place RPA VTOL авиация автоматизация автомобили автомобили и роботы автономные аддитивные технологии андроиды анималистичные антропоморфные Арт аэромобили аэропорты аэротакси безопасность безработица и роботы беспилотники бионика больницы будущее бытовые роботы вакансии вектор вертолеты видео внедрения роботов водородные военные военные дроны военные роботы встречи высотные выставки газ Германия горнодобыча городское хозяйство гостиницы готовка еды Греция грузоперевозки группы дронов гуманоидные дайджест Дания доение роботизированное доильные роботы домашние роботы доставка беспилотниками доставка и роботы дронизация дроны Европа еда железные дороги животноводство захваты земледелие игрушки идеи измерения Израиль ИИ ИИ — вкратце инвентаризация Индия Иннополис инспекция интервью интерфейсы инфоботы Ирак Иран искусственный интеллект испытания исследования история Италия Казахстан как заработать Канада квадрупеды кейсы киборгизация кино Китай коботы коллаборативные роботы колонки коммунальное хозяйство компании компоненты конкурсы конспекты конструкторы концепты кооперативные роботы космос курьезы курьеры лабораторные роботы Латвия лизинг линки логистика люди и роботы машинное обучение медицина медицина и роботы металлургия мнения мобильные роботы мойка море морские мусор мусор и роботы надводные наземные военные роботы налоги научные роботы необычные нефтегаз нефть Нидерланды Новая Зеландия Норвегия носимые роботы ОАЭ образование образовательная робототехника обучающие роботы общепит общепит и роботы общество Объединенное Королевство октокоптеры онлайн-курсы робототехники опрыскивание охрана и беспилотники охрана и роботы патенты персональные роботы пищепром пляжи ПО подводные подводные роботы подземные пожарные пожарные роботы поиск полевые роботы полезные роботы Португалия последняя миля потребительские роботы почта право презентации пресс-релизы применение беспилотников применение дронов применение роботов прогнозы проекты производство производство дронов происшествия промышленность промышленные роботы противодействие беспилотникам псевдоспутники работа развлечения и беспилотники развлечения и роботы разработка распознавание речи растениеводство регулирование регулирование дронов регулирование робототехники рекорды рисунки робомех робомобили роботакси роботизация робототехника роботрендз роботренды роботы роботы и автомобили роботы и мусор роботы и обучение роботы и развлечения роботы и строительство роботы телеприсутствия роботы-транспортеры робошум рои рой Россия Руанда сад сайт RoboTrends. ru сбор урожая сварка связь сделки сельское хозяйство сенсоры сервисные роботы синтез речи склады склады и роботизация соревнования сортировка сотрудничество софт-роботика социальная робототехника социальные социальные роботы спорт спорт и дроны спорт и роботы статистика строительство судовождение США такси телеком телеприсутствие теплицы термины терроризм тесты технологии техносказки торговля транспорт транспортные роботы тренды трубопроводы трубопроводы и роботизация уборка Украина уличные роботы участники рынка Франция хобби-беспилотники ховербайки Хождение цифры чатбот шагающие роботы Швейцария Швеция шоу экзоскелеты эко-дроны экология электроника энергетика этика (робоэтика) Южная Корея юмор
ru сбор урожая сварка связь сделки сельское хозяйство сенсоры сервисные роботы синтез речи склады склады и роботизация соревнования сортировка сотрудничество софт-роботика социальная робототехника социальные социальные роботы спорт спорт и дроны спорт и роботы статистика строительство судовождение США такси телеком телеприсутствие теплицы термины терроризм тесты технологии техносказки торговля транспорт транспортные роботы тренды трубопроводы трубопроводы и роботизация уборка Украина уличные роботы участники рынка Франция хобби-беспилотники ховербайки Хождение цифры чатбот шагающие роботы Швейцария Швеция шоу экзоскелеты эко-дроны экология электроника энергетика этика (робоэтика) Южная Корея юмор
Подписка: RSS,
Email,
Telegram
Информация
Обратная связь
Почему разработать двуногих роботов трудно: на примере Atlas от Boston Dynamics
Потенциал человекоподобных роботов
Официально Boston Dynamics — коммерческая организация, которая хочет серийно производить и продавать свои продукты. Но пока это исследовательская лаборатория, где работают инженеры и ученые, желающие расширить границы науки, независимо от коммерческих выгод. Эти две цели плохо сочетаются: за последнее десятилетие Boston Dynamics несколько раз сменила владельца — от Google и SoftBank до Hyundai.
Но пока это исследовательская лаборатория, где работают инженеры и ученые, желающие расширить границы науки, независимо от коммерческих выгод. Эти две цели плохо сочетаются: за последнее десятилетие Boston Dynamics несколько раз сменила владельца — от Google и SoftBank до Hyundai.
Компания стремится создать успешную бизнес-модель и уже выпустила несколько коммерческих роботов, в том числе многофункциональную робособаку Spot и передвижную роботизированную роборуку Stretch, способную перемещать коробки. Оба устройства применяются в различных областях. А производственные мощности Hyundai, вероятно, помогут сделать эти проекты прибыльными.
Atlas — некоммерческий проект, а «исследовательская платформа».
Дело не в том, что у него нет коммерческого применения. Люди спроектировали дома, города, фабрики, офисы и прочие объекты в соответствии со своим телосложением. Поэтому двуногий робот, способный передвигаться по любой поверхности и пользоваться предметами как человек, пригодится практически везде. Он может стать самой прибыльной технологией в робототехнике.
Он может стать самой прибыльной технологией в робототехнике.
Такие роботы значительно превзойдут современные прототипы, ограниченные определенной средой (ровная поверхность, равномерное освещение и т. д.). Однако и создать их гораздо сложнее. Даже Atlas, самому продвинутому на сегодняшний день «гуманоиду», предстоит еще долгий путь. И ролик с его неудачными попытками показывает, какие пробелы еще нужно восполнить.
Трудности разработки
Животные и люди растут и обучаются одновременно. По мере развития мозга и тела мы учимся ползать, стоять, ходить, бегать, прыгать и заниматься спортом. Однако выращивать роботов невозможно (по крайней мере в обозримом будущем). Инженеры обучают уже готовую машину, и в ходе экспериментов она многократно изменяется и улучшается.
Вместо того, чтобы воспроизводить природные явления во всех деталях, робототехника, как и многие другие области науки, стремится найти короткий путь, создавать модели и оптимизировать их для своих целей. Инженеры и ученые Boston Dynamics считают, что паркур поможет Atlas освоить все особенности двуногой моторики.
Инженеры и ученые Boston Dynamics считают, что паркур поможет Atlas освоить все особенности двуногой моторики.
«Вероятно, в коммерческих условиях роботу не придется делать сальто назад», — сообщает Boston Dynamics в своем блоге.
«Однако не нужно богатого воображения и отраслевых знаний, чтобы понять, как Atlas пригодится способность выполнять тот же набор движений и физических задач, что и человек. Если робот научится реагировать на окружающую среду с ловкостью обычного взрослого, число потенциальных применений будет практически безгранично», — считает компания.
Таким образом, если робот научится делать сальто назад, перепрыгивать через платформы и бегать по узким дорожкам, то будет способен выполнять и другие базовые движения. Boston Dynamics добавляет, что паркур — это «активность, которая задействует все тело и требует, чтобы Atlas сохранял равновесие в различных ситуациях и плавно переходил от одного поведения к другому».
Развитие Atlas действительно впечатляет. Например, робот уже может восстанавливать баланс при неловком приземлении. По словам Boston Dynamics, инженеры предоставили Atlas набор шаблонов поведения, и он самостоятельно адаптировал их к новым сценариям.
Однако робот все еще с трудом справляется с некоторыми базовыми навыками приматов. Иногда он падает плашмя, когда пропускает прыжок или теряет равновесие. В таких случаях приматы инстинктивно вытягивают руки, чтобы смягчить удар от падения и защитить голову, шею, глаза и другие важные части тела.
Сложная среда, такая как площадка для паркура, помогает обнаружить и устранить эти пробелы намного быстрее.
Обучение в симуляторе и в реальном мире
Одна из основных трудностей разработки роботов — обучение в физическом мире. И на видео с Atlas это хорошо заметно. Команде инженеров нужно регулярно ремонтировать робота, потому что он часто получает повреждения. Это увеличивает расходы и замедляет обучение.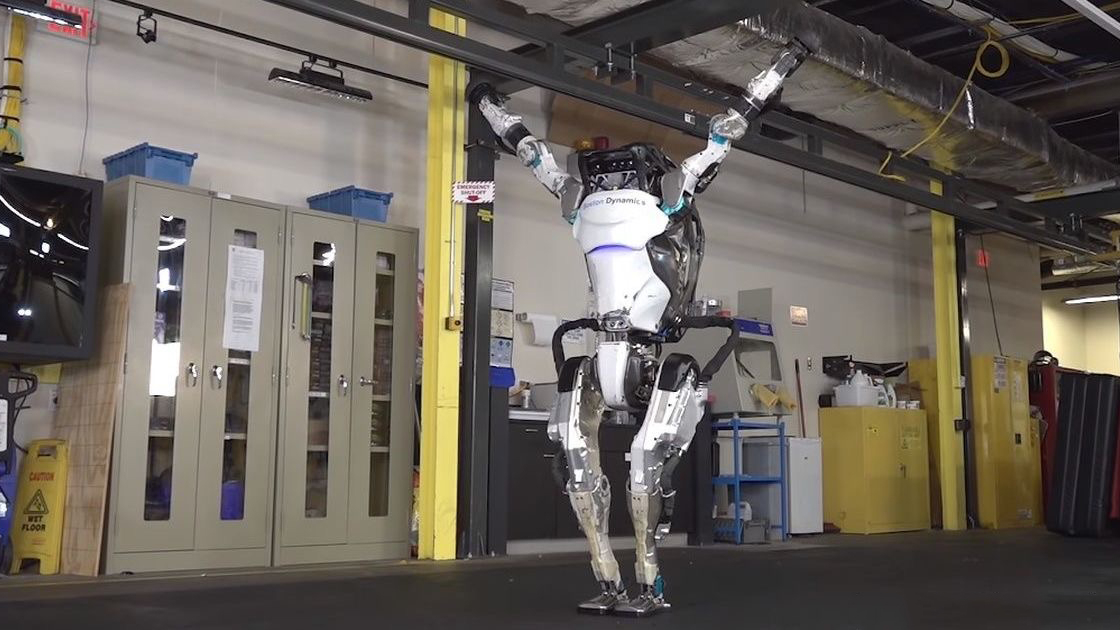
Помимо этого, ИИ-системам, управляющим движениями машины, требуется огромное количество тренировок — в разы больше, чем человеку. Такой эксперимент трудно масштабировать. Он займет годы, а ремонт и улучшения робота будут стоить больших денег.
Конечно, обучение можно ускорить, если использовать несколько прототипов, которые будут параллельно тренироваться на разных площадках. Однако это значительно увеличит расходы и потребует огромных инвестиций в оборудование и недвижимость.
В качестве альтернативы используются виртуальное пространство. Инженеры ПО создают трехмерные среды, в которых виртуальная версия робота обучается быстро и без лишних затрат. Такие симуляторы используются как в робототехнике, так и при разработке самоуправляемых автомобилей.
Но и у этого способа есть недостатки.
- Виртуальные миры — лишь примерная версия реального. Они часто упускают мелкие детали, которые могут сильно изменить ход событий, и не избавляют от необходимости обучать роботов в физическом мире.
- В реальной среде могут возникнуть трудности, которые очень трудно сымитировать в виртуальной. Например, робот может соскользнуть с неустойчивого отступа, кончик его ноги — застрять в щели.
 Они часто упускают мелкие детали, которые могут сильно изменить ход событий, и не избавляют от необходимости обучать роботов в физическом мире.
Они часто упускают мелкие детали, которые могут сильно изменить ход событий, и не избавляют от необходимости обучать роботов в физическом мире.В ролике с Atlas показано несколько подобных случаев. Примечательный пример — робот достигает барьера и ставит руку, чтобы перепрыгнуть через него. Это простое действие, не требующее большой физической силы. Однако, когда Atlas выполняет этот трюк, его рука неуклюже трясется.
«Если бы вы или я перепрыгивали через препятствие, мы бы воспользовались некоторыми свойствами человеческого тела, которых нет у робота», — объясняет руководитель команды Atlas Скотт Куиндерсма. Например, у Atlas нет позвоночника и лопаток, поэтому он использует другой диапазон движений. У него также тяжелое туловище и относительно слабые суставы рук.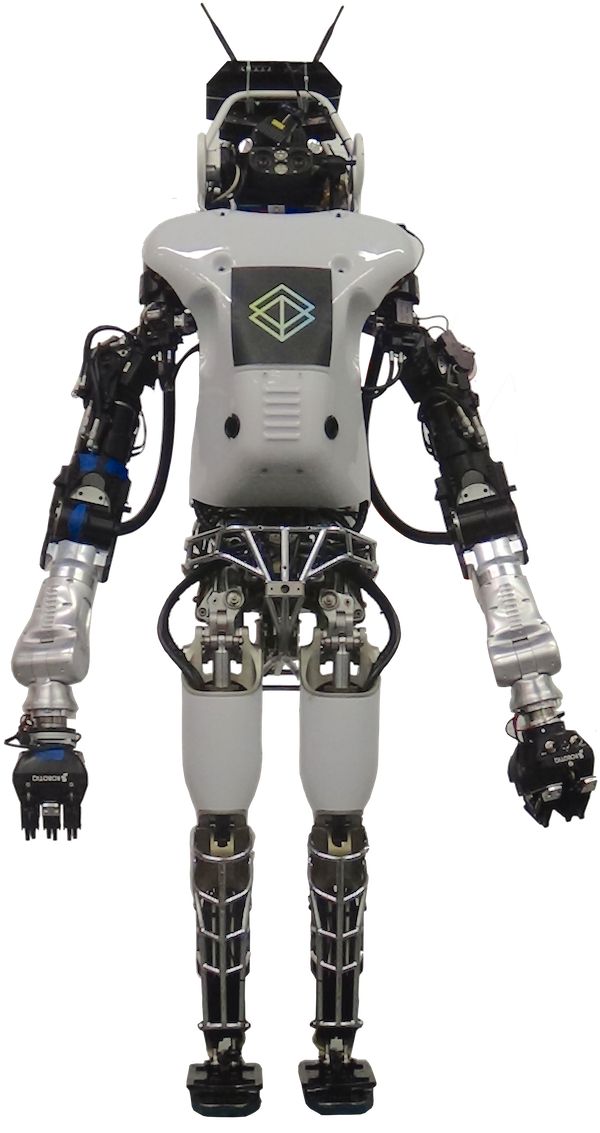
Подобные детали трудно смоделировать, поэтому они нуждаются в реальных тренировках.
Способы восприятия мира
По словам представителей Boston Dynamics, Atlas ориентируется в мире с помощью «восприятия». На сайте компании указано, что робот использует «датчики глубины, чтобы создать облака точек и определить окружение». Подобная технология применяется и в самоуправляемых автомобилях, чтобы обнаруживать дороги, объекты и людей.
Это еще один короткий путь, разработанный ИИ-сообществом. Вместо датчиков глубины, человек создает ментальную карту окружения с помощью бинокулярного зрения, параллакса, интуитивной физики и обратной связи от сенсорных систем.
Человеческое восприятие мира не идеально и поддается обману. Однако его вполне достаточно, чтобы ориентироваться в физической среде. А пока лишь предстоит увидеть, достигнет ли Atlas уровня человека с помощью датчиков глубины и зрения. А, возможно, Boston Dynamics разработает более сложную сенсорную систему.
Atlas предстоит еще долгое развитие. Во-первых, чтобы брать предметы, роботу потребуются руки, что само по себе является сложной задачей. Скорее всего, в ближайшем будущем Atlas не станет коммерческим продуктом, однако он помогает Boston Dynamics и индустрии робототехники изучать проблемы, которые уже решила природа.
«Мне трудно представить, что 20 лет спустя все еще не будут существовать мощные мобильные роботы, способные грациозно передвигаться и работать вместе с людьми, — рассказал Куиндерсма. — Но мы лишь на раннем этапе создания этого будущего. Надеюсь, что подобные демонстрации дают небольшое представление о потенциальных возможностях».
Источник.
Фото на обложке: Boston Dynamics
РОБОТ АТЛАС (ROBOT ATLAS). ВСЕ ЧТО НАДО ЗНАТЬ О ГУМАНОИДЕ ⋆ FutureNow
Твитнуть
Робот Атлас (Robot Atlas) уже изучил основы паркура. Новейшие технологии не стоят на месте! Вы точно видели его на YouTube. Атлас – это двуногий робот компании Boston Dynamics, который стал звездой ютуба благодаря коротким и удивительным видео, мгновенно массово распространились сетями. Узнайте все о роботе.
Узнайте все о роботе.
Boston Dynamics – компания из штата Массачусетс (США), о которой знают не только инженеры. Она стала известной благодаря своим видео на YouTube, на которых двуногие и звереподобные роботы прыгают, бегают, балансируют и даже делают сальто назад.
Одним из самых амбициозных проектов компании стало создание «динамического» человекоподобного робота – знаменитого робота по имени Атлас (Robot Atlas). Наш знакомый прошел ряд этапов редизайна в последние годы.
Что может робот Атлас?
Робот Атлас постоянно учится новым вещам. Сначала он, как всякий человек, научился ходить на двух ногах. Позже к его навыков прибавилось балансирование на одной ноге, способность переносить грузы, проходить в двери и даже делать сальто назад. Сейчас он научился паркура.
На видео видно, что Атлас перепрыгивает через бревно и передвигается между платформами разной высоты, не снижая темп. Атлас ориентируется на сложность полосы препятствий перед ним. На видео последовательность замедленных движений подчеркивает точность его движения, когда он прыгает между платформами, каждая из которых имеет высоту около 16 дюймов (40 сантиметров). Программное обеспечение и датчики зрения управляют навигацией работа Атлас (Robot Atlas). Координация робота выглядит очень человекообразной как для машины.
На видео последовательность замедленных движений подчеркивает точность его движения, когда он прыгает между платформами, каждая из которых имеет высоту около 16 дюймов (40 сантиметров). Программное обеспечение и датчики зрения управляют навигацией работа Атлас (Robot Atlas). Координация робота выглядит очень человекообразной как для машины.
Родители работа – Boston Dynamics – те, кто выводят роботов в реальный мир
Работы постепенно завоевывают мир. Некоторые из них уже баллотируются на выборах, некоторые принимают людей на работу. И человечеству время уже задумываться о философских. юридических и этических проблемах связаны с новейшими технологиями. Например – что такое смерть или убийство работа.
Что такое Tesla Bot? Новое детище Илона Маска
Boston Dynamics очень маленькая компания – она насчитывает всего 100 инженеров. За последние 15 лет команда сосредоточивается на основных принципах механики движения робототехники. Они стремятся изменить представление людей о том, что работы могут делать. И у них это получается.
И у них это получается.
Цель создания робота Атласа – это стимулировать инновации, чтобы подтолкнуть людей к пониманию того, как контролировать сложные машины. Робот поможет людям понять на что способны роботы вообще и недалеко то время, когда продукты Boston Dynamics начнут выходить в массовое производство.
Компания занимается обучением роботов прыгать, поскольку это даст ей понятия как решить много прагматических проблем. В таких задачах для роботов, как прыжки, нужно обладать координацией как в верхней части тела, так и в ногах. Видео, на которых изображен робот Атлас, показывают, что руки робота двигаются, чтобы лучше стабилизировать его тело, и ноги сгибаются, когда он приземлился на мягкой земле. Это все не так как в лабораторных условиях.
Boston Dynamics делает уникальную вещь – компания выводит роботов в реальный мир. До этого роботы почти всегда испытывались только в лабораторных условиях
В реальной среде роботы должны самостоятельно ориентироваться на местности.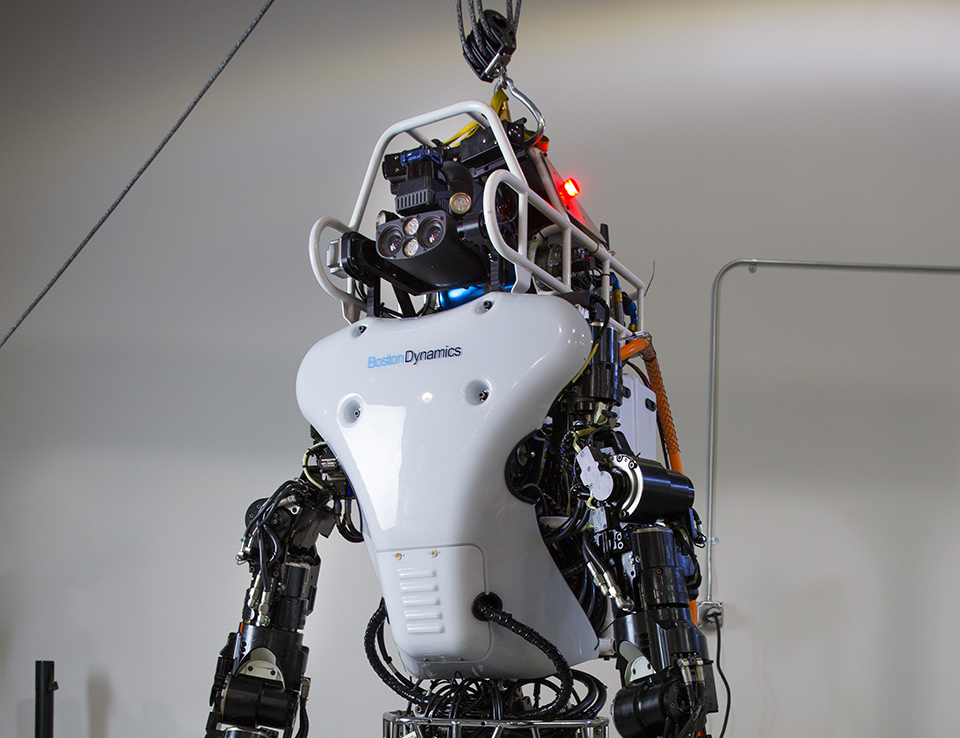 Единственная помощь, которую этот робот получает от оператора, – это простые команды джойстика, такие как продвижение вперед, влево или вправо. Все остальное происходит автономно от системы управления оператором.
Единственная помощь, которую этот робот получает от оператора, – это простые команды джойстика, такие как продвижение вперед, влево или вправо. Все остальное происходит автономно от системы управления оператором.
Эволюция робота Атлас
Boston Dynamics начали разработку Атласа в 2009 году, буквально распыляя одного из своих четвероногих роботов наполовину, чтобы сделать двуногого робота. Работа началась в рамках правительственного проекта, который использовал пневматику.
В 2012 году в США началась большая волна популярности тематики использования мобильных роботов в сценариях реагирования на катастрофы и чрезвычайные ситуации. Правительство попросило компанию создать 10 роботов, чтобы дать университетам возможность изучить, как можно эти новейшие технологии использовать на практике.
Boston Dynamics сначала использовал много готовых компонентов, чтобы составить гидравлического робота, который был двухметрового роста и весил почти 200 кг.
В 2013 году компанию приобрел Google и она получила возможность по-настоящему сконцентрироваться на деталях совершенствования робота. Boston Dynamics воспользовалась возможностью реконструировать этого гуманоидного робота с нуля.
Boston Dynamics воспользовалась возможностью реконструировать этого гуманоидного робота с нуля.
Эта новая модель робота Атласа (robot Atlas) имеет высоту около 1,5 м и весит 80 кг. Он обладает повышенной силой близкой к человеческой. Атлас полностью автономный (может работать от 30 до 60 минут в зависимости от того, что он делает) и имеет 28 степеней свободы.
ЗD печать – ключевая технология при производстве современного робота
Вместо многих готовых деталей, которые были основой первой модели робота от Boston Dynamics, они начали разрабатывать свои собственные. Технология 3D-печати стала ключевой для этой версии работа Атласа (Robot Atlas).
Компания смогла значительно уменьшить инерцию конечностей, что очень важно для ходьбы робота – большая часть силы в системе идет на раскачку ног по воздуху и ускорение и их остановку. Когда вы – двуногий и вы идете – вы на самом деле вы очень эффективны. Мы об этом редко задумываемся. Но нам нужно много сил, чтобы размахивать ногами, особенно когда они тяжелые, так что это [сокращение] было важным делом в процессе совершенствования робота.
Но это еще не вершина возможностей робота Атласа (Robot Atlas) и мы с нетерпением ждем новых новостей от его родителей – компании Boston Dynamics. А пока нам остается фантазировать на тему ближайшего роботизированного будущего – как это делается в новом сериале ” Любовь, смерть и роботы ” (Love, Death and Robots) от компании Нетфликc (Neflix) .
прыжков, прыжков и сальто назад | Boston Dynamics
Сегодня впервые оба робота Atlas безупречно преодолели сложную полосу препятствий. Или почти безупречно.
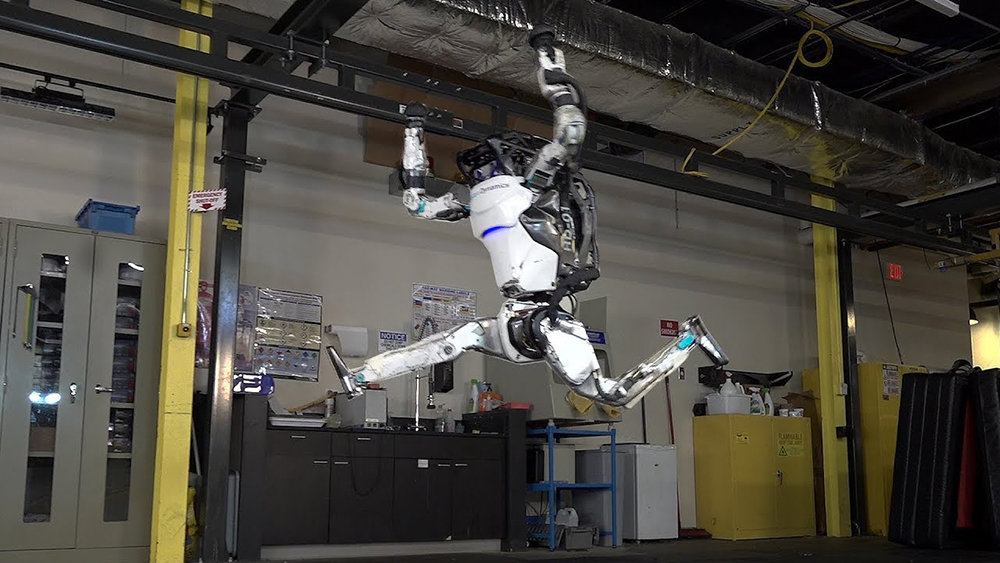
Первый из двух роботов пробежал ряд фанерных панелей, перепрыгнул через щель и побежал вверх и вниз по лестнице на втором этаже штаб-квартиры Boston Dynamics. Второй робот запрыгнул на бревно и проделал те же шаги в обратном порядке, а затем первый робот перепрыгнул через бревно. Оба совершили два идеально синхронизированных сальто назад, и команда видеосъемки запечатлела каждое движение.
И тем не менее инженеры-робототехники, которые месяцами работали над этой процедурой, почти не находят времени, чтобы отпраздновать это событие. Через несколько мгновений после того, как камеры сократили кадр, они собрались вместе, внося изменения перед следующим дублем. Хотя эта последняя попытка была почти идеальной, она была не именно идеальной, не совсем. После того, как роботы завершили сальто назад, один из них должен был качать рукой, как питчер высшей лиги после аута в конце игры — движение, которое команда Atlas называет «Ча-Чинг».
Через несколько мгновений после того, как камеры сократили кадр, они собрались вместе, внося изменения перед следующим дублем. Хотя эта последняя попытка была почти идеальной, она была не именно идеальной, не совсем. После того, как роботы завершили сальто назад, один из них должен был качать рукой, как питчер высшей лиги после аута в конце игры — движение, которое команда Atlas называет «Ча-Чинг».
Робот двигал рукой, но немного спотыкался на этом простом движении. Это было всего лишь малейшее заикание, чего большинство людей, смотрящих видео, никогда не заметят. Но команда Atlas замечает каждую деталь и хочет сделать все правильно.
«До сегодняшнего дня мы не использовали такое поведение после сальто назад, так что это был действительно эксперимент», — говорит Скотт Куиндерсма, руководитель группы Atlas в Boston Dynamics. «Если внимательно посмотреть видео, оно выглядит немного неловко. Мы собираемся изменить поведение, которое мы тестировали ранее, поэтому у нас есть некоторая уверенность, что оно сработает».
Перфекционизм, демонстрируемый здесь, достоин восхищения, и возникает ощущение, что именно такое внимание к деталям привело к созданию роботов, способных выполнять такую футуристическую, кажущуюся невыполнимой рутину. Но это также поднимает вопрос, который сначала кажется удивительным, но затем кажется очевидным: Почему это важно?
Какая разница, что Атлас заикается, когда машет кулаком? Если уж на то пошло, какое это имеет значение, если он вообще качает кулаком? И пока мы задаем вопросы, какой смысл запускать роботов через полосу препятствий? Почему фанерные панели с наклоном, зачем свод, зачем сальто назад?
Короче: почему паркур?
ПОСТРОЕНИЕ ФУНДАМЕНТА
Способность робота выполнять сальто назад может никогда не оказаться полезной в коммерческих условиях. (Atlas — это исследовательская платформа, а не коммерческий продукт.) Но не требуется большого воображения или специальных знаний, чтобы понять, почему для Atlas было бы полезно выполнять тот же диапазон движений и физических задачи как люди. Если роботы в конечном итоге смогут реагировать на окружающую среду с таким же уровнем ловкости, как и средний взрослый человек, диапазон потенциальных приложений будет практически безграничным.
Если роботы в конечном итоге смогут реагировать на окружающую среду с таким же уровнем ловкости, как и средний взрослый человек, диапазон потенциальных приложений будет практически безграничным.
«Гуманоиды интересны с двух точек зрения, — говорит Куиндерсма. «Во-первых, они отражают наше видение робота будущего, который может идти куда угодно и делать все, что угодно. Они могут быть не лучшим дизайном для какой-либо конкретной задачи, но если вы хотите построить одну платформу, которая могла бы выполнять широкий спектр физических задач, мы уже знаем, что человеческий фактор способен это сделать».
«С технической точки зрения гуманоиды создают несколько проблем, которые мы приветствуем как исследовательская группа», — добавляет он. «Их сочетание размера и сложности создает компромиссы при проектировании оборудования, связанные с соотношением прочности и веса, временем работы, диапазоном движений и физической надежностью. В то же время наша команда управления должна создать алгоритмы, которые могут рассуждать о физической сложности этих машин, чтобы создать широкий набор высокоэнергетического и скоординированного поведения. В конечном счете, расширение возможностей роботов-гуманоидов, таких как Atlas, стимулирует инновации в области аппаратного и программного обеспечения, которые применимы ко всем нашим роботам в Boston Dynamics».
В конечном счете, расширение возможностей роботов-гуманоидов, таких как Atlas, стимулирует инновации в области аппаратного и программного обеспечения, которые применимы ко всем нашим роботам в Boston Dynamics».
В конечном счете, расширение возможностей человекоподобного робота, такого как Atlas, приводит к инновациям в области аппаратного и программного обеспечения, которые применяются ко всем нашим роботам в Boston Dynamics.
— Скотт Куиндерсма, руководитель группы Atlas
Паркур, каким бы узким и специфичным он ни казался, дает команде Atlas прекрасную песочницу для экспериментов с новым поведением. Это деятельность всего тела, которая требует, чтобы Atlas сохранял равновесие в различных ситуациях и плавно переключался между одним поведением и другим.
«На самом деле речь идет о создании поведения на пределе возможностей робота и обеспечении их совместной работы в гибкой системе управления», — говорит Куиндерсма. «Есть много важных проблем, которые паркур не заставляет решать, но не в этом дело.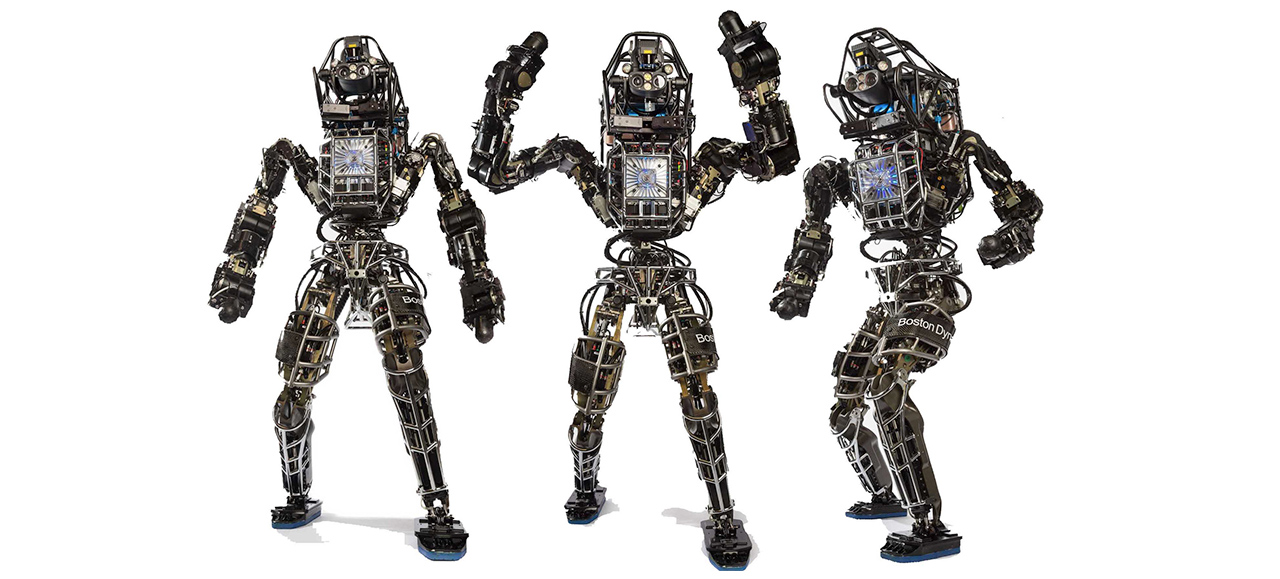 Мы не пытаемся решить все сразу. Работа, которую мы делаем сейчас, позволяет нам создать прочную основу для решения следующего набора исследовательских задач».
Мы не пытаемся решить все сразу. Работа, которую мы делаем сейчас, позволяет нам создать прочную основу для решения следующего набора исследовательских задач».
ЭВОЛЮЦИЯ ATLAS
Оглядываясь на видео Atlas за пять лет, легко упустить из виду, какого прогресса добилась команда за это время. На самом деле некоторые улучшения невидимы для обычного зрителя, хотя они представляют собой гигантские скачки (в данном случае буквально) в технологии. Хотя Атлас делал кувырки, стойки на руках и сальто назад в более ранних видеороликах, основные процессы управления этими движениями эволюционировали.
«Сейчас движения Атласа управляются восприятием, а раньше этого не было, — объясняет Куиндерсма. «Например, предыдущие вольные и танцевальные видео были посвящены нашей способности создавать разнообразные динамические движения и объединять их в рутину, которую мы могли выполнять снова и снова. В этом случае система управления робота все еще должна вносить множество критических корректировок на лету, чтобы поддерживать баланс и осанку, но робот не воспринимал окружающую среду и не реагировал на нее».
В этой итерации паркура робот адаптирует поведение в своем репертуаре в зависимости от того, что он видит. Это означает, что инженерам не нужно заранее программировать прыжковые движения для всех возможных платформ и промежутков, с которыми может столкнуться робот. Вместо этого команда создает меньшее количество шаблонов поведения, которые можно сопоставить со средой и выполнить в режиме онлайн.
«Мы решили добавить поворот с креном довольно поздно в нашем процессе разработки», — говорит Юхи Абэ, старший инженер по системам управления в команде Atlas. «Мы смогли использовать инструменты, разработанные для создания толчковых движений в других контекстах, чтобы быстро создать прототип, который мы усовершенствовали, используя комбинацию моделирования и тестирования роботов».
Моделирование является важным инструментом разработки для группы управления Atlas, как для оценки нового поведения перед тестированием роботов, так и для проверки того, что новые изменения программного обеспечения не повлияют негативно на существующие возможности. Но до сих пор нет замены аппаратному тестированию, особенно в движениях, ограничивающих производительность, таких как прыжки с трамплина.
Но до сих пор нет замены аппаратному тестированию, особенно в движениях, ограничивающих производительность, таких как прыжки с трамплина.
Об этом прыжке: в отличие от гимнастических прыжков с высоким переворотом, прыжок в стиле паркур — чуть менее эффектный метод, предназначенный для преодоления бегуном низкой стены или препятствия — в данном случае бревна высотой всего в несколько футов. Атлас кладет руку на балку, а затем поднимает свое тело над конструкцией. Для многих людей такой прыжок был бы относительно легким (особенно по сравнению с сальто назад), но для команды Атласа он представлял собой новую сложную задачу.
«Если бы вы или я перепрыгнули через барьер, мы воспользовались бы некоторыми свойствами наших тел, которые не были бы переданы роботу», — отмечает Куиндерсма. «Например, у робота нет позвоночника или лопаток, поэтому у него не такой диапазон движений, как у нас с вами. Робот также имеет тяжелый торс и сравнительно слабые суставы рук. Расширение наших инструментов, чтобы помочь нам найти решения, которые работали в рамках этих ограничений, сделало хранилище интересной задачей».
РАДОСТЬ И РАЗОЧАРОВАНИЕ
Во время съемок Атлас примерно в половине случаев попадает в хранилище правильно. (Естественным последствием доведения роботов до их предела является то, что иногда эти ограничения достигаются.) В других случаях Атлас преодолевает барьер, но теряет равновесие и падает назад, и инженеры смотрят на бревна, чтобы увидеть если они могут найти возможности для оперативных корректировок.
«Здесь есть много довольно интересных вариантов поведения, и некоторые из них еще не совсем надежны», — говорит Бен Стивенс, руководитель Atlas Controls. «Каждое поведение здесь имеет небольшой шанс провала. уже почти 90 секунд непрерывных прыжков, бега трусцой, поворотов, прыжков и переворотов, так что эти вероятности складываются».
Стивенс добавляет, что Boston Dynamics впервые сняла двух роботов, выполняющих паркур вместе. «На самом деле мы никогда не делали двух роботов вместе до двух недель назад», — говорит он в день съемок программы. «Сейчас мы находимся в том месте, где это должно сработать. Мы думаем, что уловили все основные сбои, и теперь все сводится к этим небольшим вероятностям».
Мы думаем, что уловили все основные сбои, и теперь все сводится к этим небольшим вероятностям».
В итоге как всегда все сходится. Съемочная группа получает дубль, которым все довольны, вплоть до финальных праздничных движений. Работа кропотливая и поэтапная, но когда оба робота доходят до конца рутины, инженерам приходится перестать аплодировать, прежде чем камеры перестанут вращаться.
«Я думаю, что это одна из радостей робототехники, что мы решаем действительно сложные проблемы, и с этим приходят неизбежные разочарования на этом пути», — говорит Куиндерсма. «Мне трудно представить мир через 20 лет, в котором не будет способных мобильных роботов, которые двигаются с изяществом, надежностью и работают вместе с людьми, чтобы обогатить нашу жизнь. Но мы все еще находимся на ранних этапах создания этого будущего. Я надеюсь, что подобные демонстрации дают небольшое представление о том, что возможно».
ПОДПИСАТЬСЯ НА ИНФОРМАЦИЮ
Переворачивание сценария с помощью Atlas
Что нужно роботу, чтобы бегать, переворачиваться, прыгать и прыгать, как спортсмен? Создание этих энергичных демонстраций — забавная задача, но наши технические цели выходят за рамки простого создания яркого представления. В проекте Atlas мы используем паркур в качестве экспериментальной темы для изучения проблем, связанных с созданием быстрого поведения, динамической локомоцией и связями между восприятием и контролем, которые позволяют роботу адаптироваться — буквально — на лету.
В проекте Atlas мы используем паркур в качестве экспериментальной темы для изучения проблем, связанных с созданием быстрого поведения, динамической локомоцией и связями между восприятием и контролем, которые позволяют роботу адаптироваться — буквально — на лету.
ВОСПРИЯТИЕ ДЛЯ ПАРКУРА
Робот восприятие Алгоритмы используются для преобразования данных с датчиков, таких как камеры и лидары, во что-то полезное для принятия решений и планирования физических действий. В то время как Atlas использует IMU, положения суставов и датчики силы для управления движением своего тела и ощущения земли для баланса, ему требуется восприятие, чтобы идентифицировать и перемещаться по препятствиям, таким как зазор и узкий луч, показанные на рисунке 1.
Рисунок 1: Это анимация показывает вращающийся вид облака точек, созданного камерой глубины на одном роботе Atlas, в то время как другой робот прыгает через его поле зрения.
Atlas использует времяпролетную камеру глубины для создания облаков точек окружающей среды со скоростью 15 кадров в секунду. Облако точек представляет собой большой набор измерений дальности. Программное обеспечение Atlas для восприятия извлекает поверхности из этого облака точек, используя алгоритм, называемый многоплоскостной сегментацией. Результаты этого алгоритма передаются в картографическую систему, которая строит модели различных объектов, которые Atlas видит с помощью своей камеры.
Облако точек представляет собой большой набор измерений дальности. Программное обеспечение Atlas для восприятия извлекает поверхности из этого облака точек, используя алгоритм, называемый многоплоскостной сегментацией. Результаты этого алгоритма передаются в картографическую систему, которая строит модели различных объектов, которые Atlas видит с помощью своей камеры.
Рисунок 2: Визуализация Atlas с выходными данными восприятия.
На рис. 2 показано, что видит Atlas, и как это восприятие используется для планирования действий. В левом верхнем углу — инфракрасное изображение, снятое камерой глубины. Белые точки на основном изображении образуют облако точек. Оранжевые контуры отмечают обнаруженные прямоугольные грани препятствий паркура, которые отслеживаются с течением времени на основе наблюдений датчика. Эти обнаруженные лица затем используются для планирования определенного поведения. Например, зеленые следы представляют собой будущий план того, где прыгать и бегать дальше.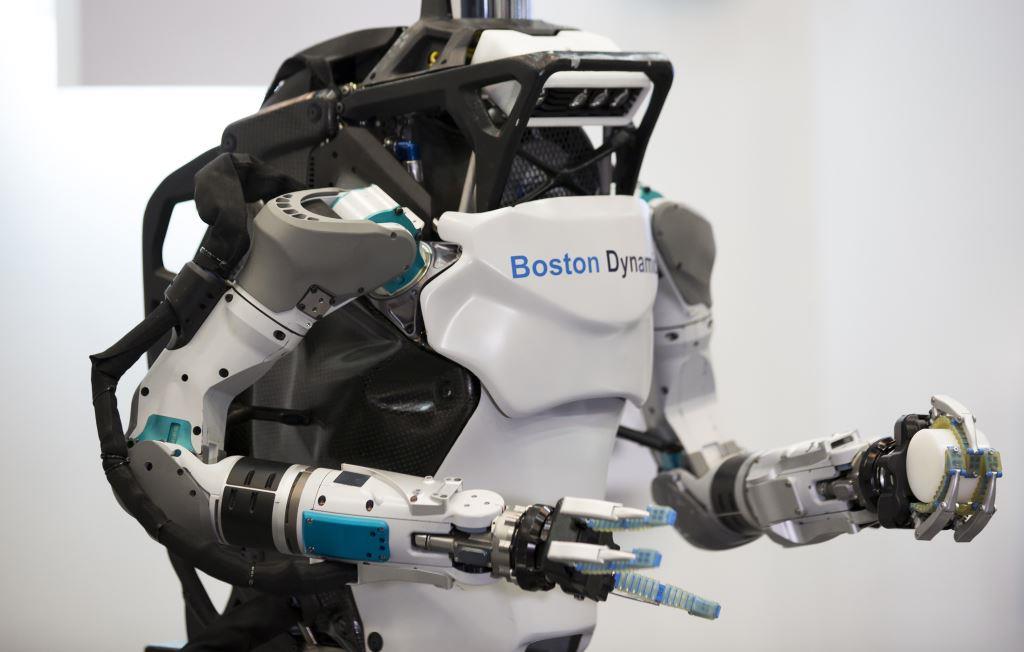
Чтобы пройти расширенный курс паркура, мы даем роботу карту высокого уровня, на которой указано, куда мы хотим, чтобы он шел, и какие трюки он должен выполнять по пути. Эта карта не является точным геометрическим соответствием реальному курсу; это приблизительное описание, содержащее шаблоны препятствий и аннотированные действия. Atlas использует эту скудную информацию для навигации по курсу, но использует данные о реальном восприятии для заполнения деталей. Например, Атлас знает, что нужно искать ящик, на который можно запрыгнуть, и если ящик сдвинуть на 0,5 метра в сторону, то Атлас найдет его там и прыгнет туда. Если ящик отодвинется слишком далеко, система не найдет его и остановится.
Рисунок 3. Анимация, показывающая, как роботы воспринимают курс «Партнеры в паркуре».
Эта анимация представляет собой 3D-визуализацию, показывающую, что видит и планирует робот, преодолевая полосу препятствий паркура. Активно отслеживаемые объекты отображаются зеленым цветом и переходят от зеленого к фиолетовому по мере того, как они выходят из поля зрения датчиков восприятия робота. Система слежения постоянно оценивает положение объектов в мире, а навигационная система планирует зеленые шаги относительно этих объектов, используя информацию с карты.
Система слежения постоянно оценивает положение объектов в мире, а навигационная система планирует зеленые шаги относительно этих объектов, используя информацию с карты.
БИБЛИОТЕКИ ПОВЕДЕНИЯ
Каждое движение, которое Атлас выполняет во время паркура, основано на заранее созданном шаблоне с использованием оптимизации траектории. Создание библиотеки этих шаблонов позволяет нам продолжать добавлять новые возможности роботу, добавляя в библиотеку новые траектории. Учитывая запланированные цели из восприятия, робот выбирает поведение из библиотеки, которое максимально соответствует заданным целям.
Разработка поведения в автономном режиме с помощью оптимизации траектории позволяет нашим инженерам заблаговременно в интерактивном режиме изучить пределы возможностей робота и сократить объем вычислений, которые мы должны выполнять с роботом. Например, детали того, как именно робот координирует свои конечности, чтобы взлететь и согнуться для сальто назад, могут иметь большое влияние на успех из-за физических ограничений, таких как пределы срабатывания.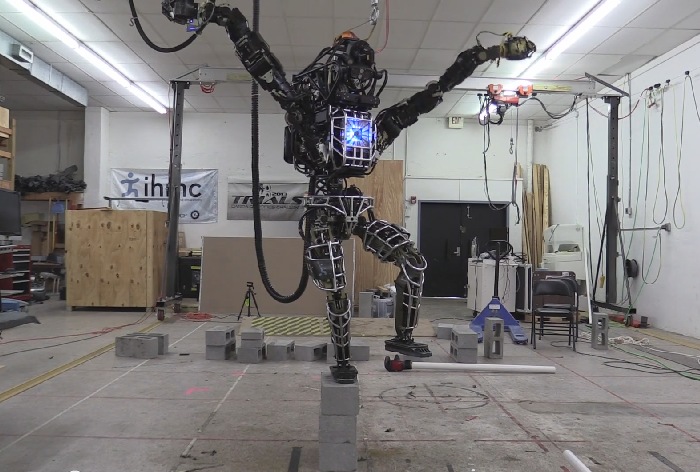 Использование автономной оптимизации позволяет нам зафиксировать важные ограничения, подобные этому, во время разработки и адаптировать их в режиме онлайн с помощью единого контроллера общего назначения.
Использование автономной оптимизации позволяет нам зафиксировать важные ограничения, подобные этому, во время разработки и адаптировать их в режиме онлайн с помощью единого контроллера общего назначения.
Рисунок 4: Это поведение хранилища является примером сложного поведения всего тела, разработанного с использованием автономной оптимизации траектории. Наш онлайн-контроллер превращает движение шаблона в реальность.
УПРАВЛЕНИЕ С ПРОГНОЗИРОВАНИЕМ МОДЕЛИ
Определив ящики, пандусы или барьеры перед роботом и спланировав последовательность маневров для их преодоления, оставшаяся задача состоит в том, чтобы заполнить все детали, необходимые для надежной работы робота. выполнить план.
Контроллер Atlas известен как модельно-прогнозирующий контроллер (MPC), поскольку он использует модель динамики робота для прогнозирования того, как его движение будет развиваться в будущем. Контроллер работает, решая оптимизацию, которая вычисляет, что лучше всего сделать прямо сейчас для создания наилучшего возможного движения с течением времени.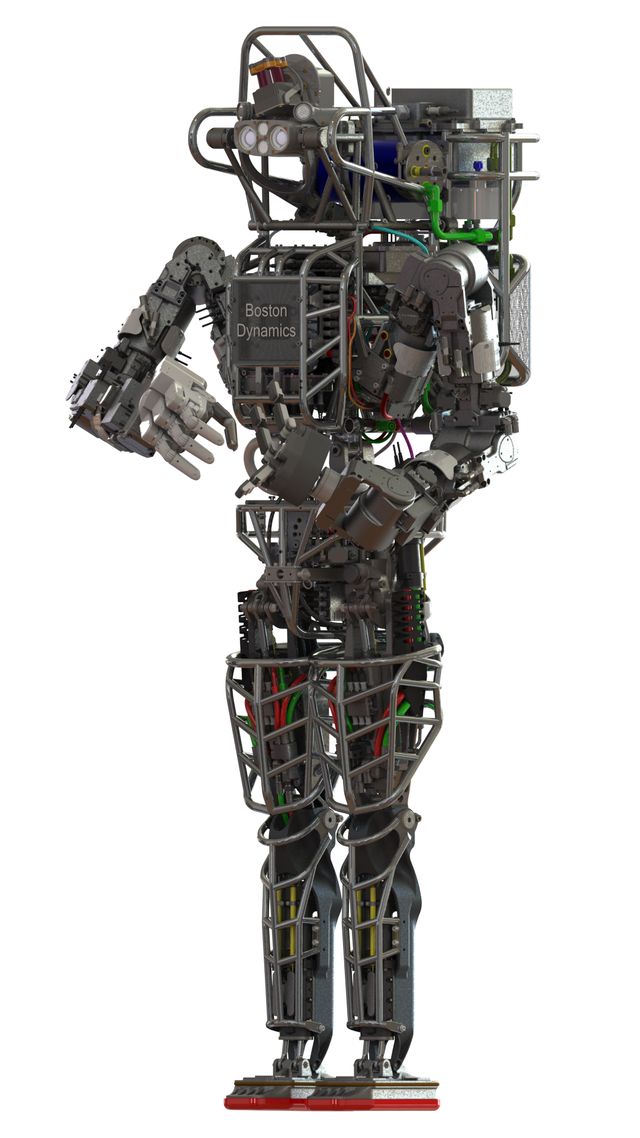
Как мы описали выше, каждый шаблон в нашей библиотеке поведения предоставляет контроллеру информацию о том, как выглядит хорошее решение. Контроллер регулирует такие детали, как сила, поза и время поведения, чтобы справиться с различиями в геометрии окружающей среды, скольжением ног или другими факторами в реальном времени. Наличие контроллера, способного значительно отклоняться от шаблонных движений, упрощает процесс создания поведения, поскольку это означает, что нам не нужно иметь шаблоны поведения, соответствующие каждому возможному сценарию, с которым столкнется робот. Например, прыжок с платформы 52 см ничем не отличается от прыжка с платформы 40 см, и мы можем доверить MPC прояснение деталей.
Рисунок 5: Вид от первого лица, показывающий как восприятие, так и запланированный путь. Синие стрелки соответствуют предсказаниям MPC центра масс и импульса робота по мере его движения по курсу.
Прогностическое свойство MPC также позволяет Atlas видеть за пределами поведения. Например, зная, что за прыжком следует сальто назад, контроллер может автоматически создавать плавные переходы от одного движения к другому. Это снова упрощает задачу создания поведения, поскольку нам не нужно заранее учитывать все возможные последовательности поведения. Конечно, инновации, которые мы можем ожидать от MPC, имеют пределы. Например, попытка перейти к сальто назад из быстрого бега трусцой вперед не сработает. В общем, мы должны найти баланс между сложностью контроллера и размером библиотеки поведения.
Например, зная, что за прыжком следует сальто назад, контроллер может автоматически создавать плавные переходы от одного движения к другому. Это снова упрощает задачу создания поведения, поскольку нам не нужно заранее учитывать все возможные последовательности поведения. Конечно, инновации, которые мы можем ожидать от MPC, имеют пределы. Например, попытка перейти к сальто назад из быстрого бега трусцой вперед не сработает. В общем, мы должны найти баланс между сложностью контроллера и размером библиотеки поведения.
СОЗДАНИЕ ФУНДАМЕНТА ДЛЯ БУДУЩЕГО
Наша работа над паркуром дала нам четкое понимание того, как создавать и контролировать широкий спектр динамического поведения на Атласе (включая танец). Но что еще более важно, это дало возможность разработать расширяемую программную систему, которая будет расти вместе с нашей командой по мере того, как Atlas обретает новые возможности восприятия и изменения своей среды. Мы рады продолжить работу на этом фундаменте, расширяя возможности Atlas.
ПОДПИСАТЬСЯ НА ИНФОРМАЦИЮ
Atlas Robot
Specifications
| Weight | 80 | kg |
| Height | 1.8 | m |
| Speed | 1.5 | m/s |
| Полезная нагрузка | 11 | кг |
| Степени свободы (DOF) | 28 | |
| Navigation sensors | LIDAR and stereo vision | |
| Hydraulic Actuation | Legs | 6 per leg |
| Arms | 6 per arm | |
| Спинка | 3 для шарниров | |
| Горловина | 1 для шага 9040503 |
Обзор
Многие гуманоидные приложения можно разложить на две задачи управления: контроллер уровня поведения, который выдает команды высокого уровня, и контроллер низкого уровня, который отвечает за генерацию совместных команд. Чтобы полностью использовать рабочее пространство и быть устойчивым к внешним возмущениям, контроллер нижнего уровня должен учитывать кинематику и динамику всего тела.
Чтобы полностью использовать рабочее пространство и быть устойчивым к внешним возмущениям, контроллер нижнего уровня должен учитывать кинематику и динамику всего тела.
Одним из популярных подходов к управлению человекоподобными роботами является инверсная кинематика с отслеживанием положения жестких суставов. С другой стороны, подходы, основанные на обратной динамике, получили все большее признание, обеспечивая податливые движения и устойчивость к внешним возмущениям. Однако эффективность таких методов сильно зависит от высококачественных динамических моделей, которые зачастую очень сложно создать для физического робота. Подходы инверсной кинематики требуют только кинематических моделей, которые гораздо проще создать на практике.
Управление
Предлагаемый контроллер всего тела тестируется на роботе Atlas от Boston Dynamics в рамках DARPA Robotics Challenge. Atlas имеет 28 гидравлических приводов, по 6 на каждую ногу и руку, 3 на суставы спины и 1 на наклон шеи.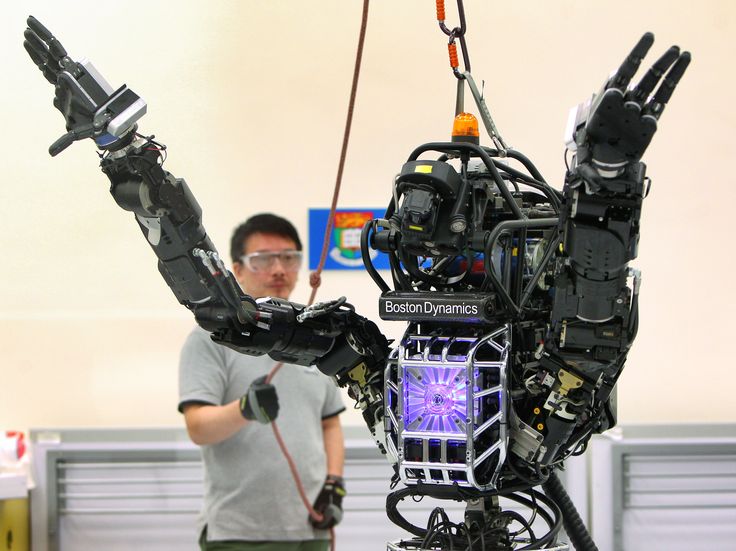 Наши контроллеры для ходьбы по пересеченной местности, подъема по лестнице и манипулирования всем телом предназначены для этого.
Наши контроллеры для ходьбы по пересеченной местности, подъема по лестнице и манипулирования всем телом предназначены для этого.
A. Статическая ходьба
Требуемые движения высокого уровня, такие как траектории маха ногой, генерируются с помощью пятикратных сплайнов. Заданные местоположения ступенек используются в качестве узловых точек для сплайнов.
B. Манипуляции всего тела
Во время манипулирования всем телом оператор подает серию команд, запрашивающих либо прямые углы сочленения для одной или обеих рук, либо целевые декартовы положения для одной или обеих рук. Эти команды используются для обновления желаемой позиции. Мы используем ограничения равенства в инверсной кинематической формулировке, чтобы обеспечить прямо заданные углы соединения. Для больших декартовых движений мы перемещаем желаемые местоположения через сплайны, начиная с текущей цели и заканчивая новой целью. Для небольших движений мы используем описанный выше метод «подталкивания» для точного позиционирования стопы: одиночное нажатие на клавиатуру приводит к небольшим мгновенным изменениям в желаемой инверсной кинематической позиции. Затем мы используем коэффициенты усиления ЧР, сравнивая измеренные и инверсные кинематические положения, чтобы получить входное желаемое ускорение для инверсной динамики.
Затем мы используем коэффициенты усиления ЧР, сравнивая измеренные и инверсные кинематические положения, чтобы получить входное желаемое ускорение для инверсной динамики.
C. Управление поперечной дверью
Обход двери, как правило, является тривиальной задачей для людей, но особенно сложной задачей для роботов-гуманоидов. Обход двери можно разбить на четыре подзадачи; обнаружение двери, подойти к двери, открыть дверь и пройти через дверь.
Преобразования и системы координат, участвующие в вычислении расстояния. Текущий кадр конечного эффектора — C, а поза руки для захвата
Конечный автомат, управляемый событиями, с подзадачами в качестве состояний используется для управления автономным выполнением процесса с проверкой человеком на критических узлах. Конечный автомат запускается в состоянии обнаружения двери. Обнаружение выполняется с использованием подхода, основанного на зрении. Как только у робота есть нормаль к двери и положение ручки, происходит переход состояния, переводящий конечный автомат в состояние ходьбы к двери.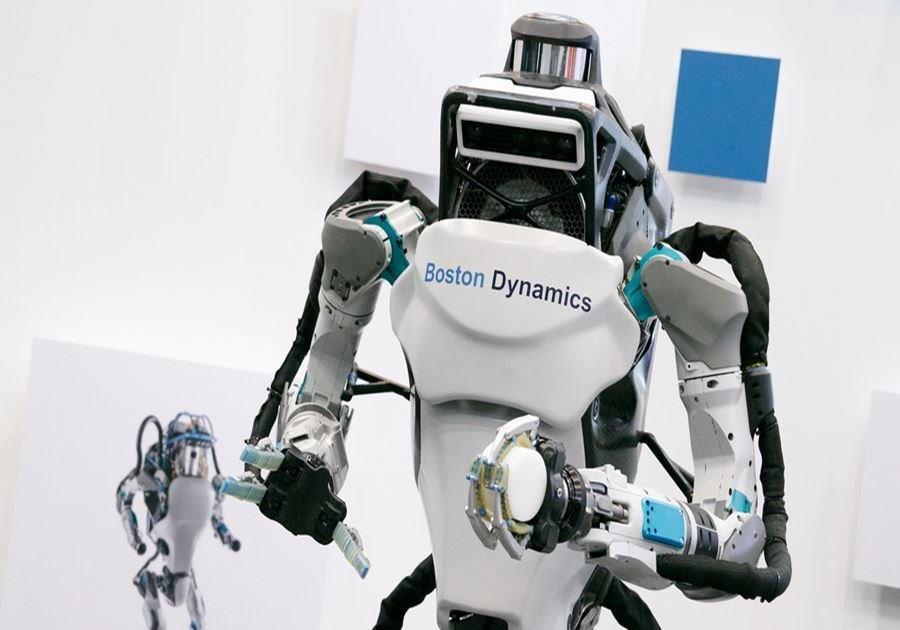 В этот момент робот следует по шаговой траектории и подходит к нужному положению стойки для открытия двери. Третье состояние конечного автомата — открытие двери, состоящее из четырех подсостояний. Сначала переходим к ручке. Из-за размера руки и ручки допустимая ошибка между желаемым положением руки и фактическим положением составляет менее 2 см. Второе подсостояние — хватание за ручку. Когда пальцы касаются двери, между ручкой и ладонью все еще остается много места, а это означает, что рука будет создавать неожиданное тянущее усилие на ручке после полного захвата ручки. Таким образом, рука должна двигаться вперед примерно на 4 см при выполнении хватательного движения. Третье — открыть дверь. В этом состоянии наша система планирования движения используется для создания последовательности движений, таких как поворот ручки, вытягивание двери для открывания двери или отталкивание двери для открывания двери, а также поднятие рычага для предотвращения открывания двери. повторное закрытие.
В этот момент робот следует по шаговой траектории и подходит к нужному положению стойки для открытия двери. Третье состояние конечного автомата — открытие двери, состоящее из четырех подсостояний. Сначала переходим к ручке. Из-за размера руки и ручки допустимая ошибка между желаемым положением руки и фактическим положением составляет менее 2 см. Второе подсостояние — хватание за ручку. Когда пальцы касаются двери, между ручкой и ладонью все еще остается много места, а это означает, что рука будет создавать неожиданное тянущее усилие на ручке после полного захвата ручки. Таким образом, рука должна двигаться вперед примерно на 4 см при выполнении хватательного движения. Третье — открыть дверь. В этом состоянии наша система планирования движения используется для создания последовательности движений, таких как поворот ручки, вытягивание двери для открывания двери или отталкивание двери для открывания двери, а также поднятие рычага для предотвращения открывания двери. повторное закрытие.
C. Подъем по лестнице
Подъем по лестнице
Контроллер, лежащий в основе подъема по лестнице, аналогичен контроллеру, используемому для манипулирования, но большая часть движения запрограммирована заранее, и оператор контролирует только окончательное размещение рук и ног. Для каждой конечности рука или нога автоматически перемещается примерно в нужное положение, помещая ее относительно другой руки или ноги. Правильная высота по вертикали определяется автоматически с использованием датчиков силы для определения контакта ног и определения положения, когда известно, что контакт уже произошел. Перенос всего веса на пальцы ног делает робота уязвимым для проскальзывания при вращении, вызывая неожиданные повороты вокруг вертикальной оси. Чтобы правильно разместить руки на следующей ступеньке, чтобы восстановиться после таких вращений, мы должны повернуть обратное кинематическое решение, чтобы оно соответствовало измеренной ориентации. Поэтому мы периодически поворачиваем обратное кинематическое решение таким образом, чтобы ноги совпадали с измеренной ориентацией ног, позволяя роботу переориентировать верхнюю часть тела в сторону лестницы и правильно достигать целей в реальном мире.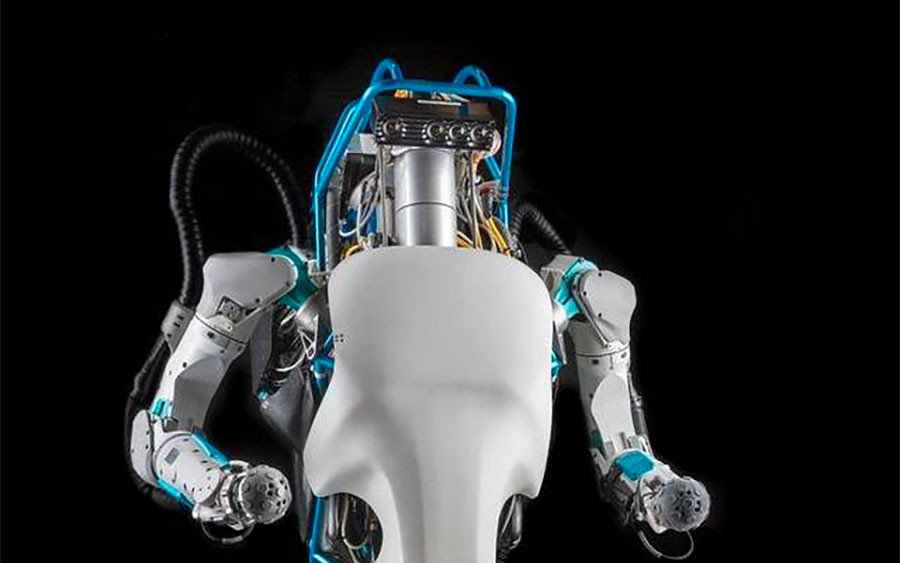 Было бы предпочтительнее постоянно обновлять ориентацию, но периодические обновления были проще с точки зрения разработки программного обеспечения. Кроме того, периодические обновления менее подвержены описанной выше проблеме «условия преследования».
Было бы предпочтительнее постоянно обновлять ориентацию, но периодические обновления были проще с точки зрения разработки программного обеспечения. Кроме того, периодические обновления менее подвержены описанной выше проблеме «условия преследования».
На этих фотографиях показан робот Atlas, взбирающийся по верхней половине той же лестницы, которая используется в DRC. Снимки делались каждые 13 секунд. Верхний ряд показывает изменение положения стрелок крюка, а нижний ряд показывает подъем на одну ступеньку. Большинство лазающих движений запрограммированы. После грубого изменения положения каждой конечности оператор может точно отрегулировать ее конечное положение с помощью команд «подталкивания», которые представляют собой небольшие смещения в декартовом пространстве.
Способности
В конкурсе робототехники Darpa 2015 года Атлас смог выполнить все восемь задач следующим образом:
- Вождение внедорожника на площадке.
- Путешествуйте в пешем порядке по щебню.
- Удалите мусор, блокирующий вход.
- Откройте дверь и войдите в здание.
- Поднимитесь по промышленной лестнице и пройдите по промышленной дорожке.
- Используйте инструмент, чтобы пробить бетонную панель.
- Найдите и закройте клапан рядом с протекающей трубой.
- Подсоедините пожарный шланг к стояку и откройте вентиль.

Обсуждение
Задача обхода двери может надежно выполняться в широком диапазоне неструктурированных сред с описанными выше алгоритмами восприятия и планирования движения. В дальнейшем планируется ускорить работу планировщика движения за счет повторного использования ранее сгенерированных траекторий в качестве исходных предположений. Кроме того, поскольку текущий планировщик движения включает только кинематические ограничения, контроллер нижнего уровня должен медленно следовать траектории, чтобы избежать динамической нестабильности. Все измерения уровня суставов ног на роботе Atlas, такие как позиционирование, скорость и крутящий момент, являются предварительной передачей. Этот выбор конструкции аппаратного обеспечения уменьшает дрожание в управлении шарниром низкого уровня, но создает проблемы для прямой кинематики и управления крутящим моментом. Неизмеренное трение значительно снижает эффективность управления крутящим моментом. Для достижения более точного отслеживания положения и управления усилием необходима лучшая технология оценки состояния.
Этот выбор конструкции аппаратного обеспечения уменьшает дрожание в управлении шарниром низкого уровня, но создает проблемы для прямой кинематики и управления крутящим моментом. Неизмеренное трение значительно снижает эффективность управления крутящим моментом. Для достижения более точного отслеживания положения и управления усилием необходима лучшая технология оценки состояния.
Ссылки
В этой работе основное внимание уделяется структуре управления гуманоидом и обсуждаются проблемы, решаемые после нескольких испытаний их методов.
S. Feng, E. Whitman, X. Xinjilefu и др. – Международная конференция IEEE-RAS по гуманоидным роботам, ноябрь 2014 г.
места, куда можно поставить ногу гуманоида.
М. Ваард, М. Инджа, А. Виссер — IEEE, 2013 г.
Это исследование посвящено целостному подходу к полноразмерному роботу-гуманоиду, который проходит через дверь в неструктурированной внешней среде в соответствии с требованиями DARPA Robotics Challenge.
Н.