Содержание
Как работает робот Atlas от Boston Dynamics? / Хабр
Как Boston Dynamics удалось научить робота Atlas бегать, прыгать, делать сальто и танцевальные па? О секретах робота рассказали основатель Boston Dynamics Марк Райберт и инженер компании Скотт Куиндерсма. Это статья подготовлена по материалам их выступления. Но как говорится, лучше 1 раз увидеть, чем 100 раз прочитать, поэтому смотрите наше видео:
Говоря об умных роботах, первое, что надо понимать, что у машин, как и у людей, есть два типа интеллекта: двигательный и когнитивный. Когнитивный интеллект позволяет осознать проблему и понять, как ее решить. Двигательный интеллект позволяет управлять телом, не задумываясь о том, как ходить или прыгать, управлять своей энергией, рассчитывая силы на то или иное действие, а также воспринять информацию в реальном времени для взаимодействия с окружающей средой.
Подход Boston Dynamics к своим роботам заключается в том, чтобы сначала создать надежный и работоспособный в любых обстоятельствах двигательный интеллект. Далее приступать к созданию когнитивного, которому будет проще планировать действия робота, опираясь на развитый двигательный интеллект. И затем инженеры должны наладить взаимодействие двигательного и когнитивного интеллектов.
Далее приступать к созданию когнитивного, которому будет проще планировать действия робота, опираясь на развитый двигательный интеллект. И затем инженеры должны наладить взаимодействие двигательного и когнитивного интеллектов.
Atlas использует свое восприятие в реальном времени для того, чтобы определить местонахождение препятствий, выбрать места опоры для ступней и координировать перенос массы тела во время движения, удерживаясь на ногах. Atlas воспринимает свое окружение так, как вы сейчас видите на экране. Во время своего движения он решает, есть ли возможность избежать препятствие, и регулирует положение тела, опираясь на расчетную траекторию, но учитывая обратную связь при выполнении расчетных действий.
Такой результат обеспечивается не только программным обеспечением и элементами управления, но и конструкцией робота. Самой важной деталью робота является очень компактный гидравлический силовой агрегат массой всего 5 кг и мощностью 5 кВт. Он разработан Boston Dynamics и вмещает электродвигатель, насос, резервуар, аккумулятор, несколько фильтров, электронику и систему охлаждения. Все это помещено в прочный корпус и размещено прямо внутри робота. Агрегат питается от легкой батареи емкость 1400 ватт*час, также разработанной Boston Dynamics. Прочный корпус не позволит аккумулятору загореться, если робот упадет.
Все это помещено в прочный корпус и размещено прямо внутри робота. Агрегат питается от легкой батареи емкость 1400 ватт*час, также разработанной Boston Dynamics. Прочный корпус не позволит аккумулятору загореться, если робот упадет.
Инженерам компании вообще многое пришлось создавать с нуля. И пространственную конструкцию рамы и ног, которые должны быть легкими, но очень прочными. И легкие гидравлические сервоклапаны особой конструкции. И, напечатанный на 3Д принтере гидравлический коллектор, вмещающий все 18 клапанов, а также сразу содержащий в своей структуре напечатанные фитинги и шланги, чтобы максимально облегчить конструкцию.
Робот контролирует свое передвижение в реальном времени с помощью камер, расположенных на передней части его условной головы. В руках и ногах робота в общей сложности 28 суставов. В области таза и по всему телу робота размещены датчики, которые измеряют ускорение робота, положение его тела в пространстве при движении и другие параметры его взаимодействия с окружающим миром.
Робот активно балансирует во время ходьбы, бега и трюков. Он умеет использовать силу инерции, чтобы экономить энергию. Он осматривает местность и ощущает ее через сенсоры в стопах, одновременно регулируя силу, прилагаемую ногами к земле. Каждый прыжок, кувырок или сальто требует от робота массы вычислений. Инженеры подчеркивают, что все роботы компании держат равновесие самостоятельно. Это означает, что если вы толкнете любого из них, то он отреагирует как человек, сделав шаг в сторону.
Atlas не выбирает, что ему делать. Команды отдает оператор. Он нажимает кнопки, подсказывая роботу, что здесь надо прыгнуть, здесь сделать сальто, а тут повернуться. Но вычислять, как именно сделать такое движение в данных условиях из текущего положения, роботу приходится самому. Как это ему удается? Давайте рассмотрим, как программируют и создают элементы управления для робота.
Подход Boston Dynamics к программированию основан на прогнозирующей модели. Это означает, что исследователи используют всю имеющуюся у них информацию о роботе для того, чтобы разработать алгоритмы управления динамическими характеристиками. Также они проводят очень много предварительных вычислений всего, что может пригодиться роботу для выполнения той или иной задачи.
Также они проводят очень много предварительных вычислений всего, что может пригодиться роботу для выполнения той или иной задачи.
Например, для Atlas создана целая библиотека предварительно рассчитанных траекторий движения. Система управления роботом берет информацию о предварительно рассчитанных траекториях и адаптирует ее к текущим условиям, информацию о которых собирает система восприятия. Atlas выбирает из библиотеки подходящую для выполнения задачи траекторию, а затем изменяет ее в соответствии с текущими условиями.Пока робот не может обучаться новым движениям самостоятельно, на основе предыдущего опыта, а действует строго по запрограммированным моделям. Хотя инженеры Boston Dynamics наверняка уже думают о его самообучении.
Что касается системы восприятии робота, то здесь Boston Dynamics использует геометрическую сегментацию. Робот буквально разбивает окружающее пространство на локальные области с простыми геометрическими формами. Эти формы становятся входными данными для системы планирования, которая продумывает несколько шагов вперед так, чтобы робот удержал равновесие, правильно использовав свои руки и ноги. Но эта информация не является статичной, она изменяется в режиме реального времени, позволяя роботу лучше приспосабливаться к условиям и избегать ошибок предварительных расчетов.
Но эта информация не является статичной, она изменяется в режиме реального времени, позволяя роботу лучше приспосабливаться к условиям и избегать ошибок предварительных расчетов.
Большой плюс робота Atlas в том, что раз научившись делать сальто он изо дня в день может делать его точно так же, с той же эффективность. Это помогло инженерам в создании потрясающего видео танцующих роботов.
Чтобы научить Atlas танцевать, компания привлекла хореографа. Предварительная работа заключалась в том, чтобы определить, какие идеи настоящего танцора можно попытаться реализовать с помощью робота. Инженеры использовали моделирование, чтобы быстро перебрать концепции движения, которые по силам выполнить роботу. Идеи сначала реализовывали в симуляции, вносили коррективы, а затем пробовали на роботе. Инженеры описывают процесс, как конвейер. Когда множество разнообразных движений описывалось множеством входных данных и реализовывалось роботом. В итоге, на создание танца потребовалось несколько месяцев напряженной работы.
В Boston Dynamics признают, что надежность робота Atlas пока нельзя сравнить с тем же показателем робота Спот. Его обслуживание занимает много времени, но инженеры не собираются останавливаться. Так, скоро Atlas научится работать руками. Не просто переставлять коробки или балансировать с помощью рук, а полноценно выполнять сложные задачи, чтобы руки робота стали такими же ловкими, как и ноги. А вы как думаете, чему еще следует научится самому продвинутому роботу в мире?
Если вы хотите сами посмотреть презентацию Марка Райберта и Скотта Куиндерсма, то вот ссылочка.
Как робот Атлас научился делать акробатические трюки, непосильные обычному человеку? / Хабр
Все восхищаются трюками, которые делает робот Атлас (Atlas): то он делает сальто (ноябрь 2017 года), то делает паркур — прыгает вверх по огромным кубам (октябрь 2018), то танцует вальс — кувырки, прыжки и развороты в воздухе (сентябрь 2019).
Что же будет дальше? Если не видели его трюки, то обязательно посмотрите видео подборку на канале PRO роботов:
Откуда появился робот Атлас?
Все начиналось еще в далеком 1980 году, когда Марк Райберт (Marc Raibert), основал “Лег Лабораторию” (Leg Laboratory) при Университете Карнеги Мелоун (CMU), а с 1986 года уже продолжил в Масачуческом Технологическом Институте (MIT). Он начинал с простых самобалансирующихся роботов, и выглядели они с одной стороны очень технологическими для того времени и очень смешными — для нашего времени.
Он начинал с простых самобалансирующихся роботов, и выглядели они с одной стороны очень технологическими для того времени и очень смешными — для нашего времени.
В 1992 году Марк основал компанию Boston Dynamics и пошло поехало: в 2005 вышел в свет робот BigDog, заказанный военным агентством США DARPA, а в феврале 2016 показали робота Атласа. В 2013 году компанию купил Google, но продал ее японскому конгломерату Soft Bank в 2017 году, т.к. не видел в ближайшей перспективе коммерциализации разработок компании. По моему мнению, Google поторопился, т.к. уже в конце 2019 году Boston Dynamics начали продавать свою робособачку SpotMini и даже наладили их серийное производство.
Робот Атласа является самым динамичным роботом на земле. Давайте разберемся почему?
Во-первых,
Атлас обладает одной из самых компактных мобильных гидравлических систем в мире. Специальные двигатели, клапаны и компактный гидравлический силовой агрегат позволяют Atlas обеспечивать высокую мощность для любого из 28 гидравлических соединений, что обеспечивает впечатляющие подвижные характеристики. Вообще Boston Dynamics сам разрабатывает много агрегатов для роботов, т.к. аналогов никто не делает.
Вообще Boston Dynamics сам разрабатывает много агрегатов для роботов, т.к. аналогов никто не делает.
Во-вторых,
усовершенствованная система управления Атласа обеспечивает очень разнообразное и гибкое передвижение, в то время, как алгоритмы работают через сложные динамические взаимодействия, учитывающие все тело робота и окружающую среду, для планирования движений. Например, робот использует руки для баланса тела так же, как человек. Максимальная скорость передвижения Атласа 1,5 м/с или 5,4 км/ч, что сравнимо со скоростью ходьбы человека.
Сейчас написан верхнеуровневый интерфейс, который позволяет управлять роботом с помощью макрокоманд (например, бежать, присесть, сделать шаг и пр.), которые уже преобразуются в микродействия и алгоритмы конечностей для обеспечения этих движений. Это позволило повысить вероятность выполнения трюков с 10-20% до 80%. Кстати, в основе управления робота лежит робототехническая операционная система (ROS — Robotics Operating System), а расширения по данным Интернет написаны на C++ и Python.
В-третьих,
Атлас использует детали, напечатанные на 3D-принтере, чтобы обеспечить оптимальное соотношение прочности и веса, необходимое для прыжков и сальто. При высоте робота в 1,5 м он весит всего 80 кг., что очень мало для такого робота. Первая версия Атласа весила 200 кг.
Робот нас конечно привлекает своей похожестью на человека и сложной динамикой, но какие есть минусы у данного робота?
Несмотря на сложность алгоритмов, обрабатывающих движение робота, Атлас полностью управляется с пульта или программируется заранее, что конечно далеко от нашего представления об автономных роботах. Атлас не обладает никаким искусственным интеллектом (ИИ), хотя Boston Dynamics уже сейчас работает над этими алгоритмами и ищет специалистов по ИИ. Кстати, к ним можно устроиться на работу, если посмотреть вакансии на официальном сайте. Но даже, если компания интегрирует в робота ИИ, то он будет узкоспециализированный и опять же будет пока далек от нашего представления роботов из кино.
Также робот не разговаривает и не реагирует на голосовые команды, что делает его, как минимум, не современным, т.к. тренд на голосовое управление и общение с роботами явно виден в последнее время.
Но самое главное — это то, что реального применения робота пока нет. Да, он может перетаскивать коробки, но нужен ли нам грузчик за миллион долларов? Да, он может в будущем патрулировать территорию, но опять же сколько охранников и на сколько лет можно нанять за эту сумму? Вот тут кроется основная проблема — соотношение полезности робота и его цены. Если разработчики решат эту проблему, то безусловно робота Атласа ждет фееричное будущее.
А вы бы какое применение нашли роботу Atlas? Пишите в комментариях.
С надеждой на будущее, Александр Байкин, автор YouTube-блога PRO Роботов.
Переворачивание сценария с помощью Atlas
Что нужно роботу, чтобы бегать, переворачиваться, прыгать и прыгать, как спортсмен? Создание этих энергичных демонстраций — забавная задача, но наши технические цели выходят за рамки простого создания яркого представления. В проекте Atlas мы используем паркур в качестве экспериментальной темы для изучения проблем, связанных с созданием быстрого поведения, динамической локомоцией и связями между восприятием и контролем, которые позволяют роботу адаптироваться — буквально — на лету.
В проекте Atlas мы используем паркур в качестве экспериментальной темы для изучения проблем, связанных с созданием быстрого поведения, динамической локомоцией и связями между восприятием и контролем, которые позволяют роботу адаптироваться — буквально — на лету.
ВОСПРИЯТИЕ ДЛЯ ПАРКУРА
Робот восприятие Алгоритмы используются для преобразования данных с датчиков, таких как камеры и лидары, во что-то полезное для принятия решений и планирования физических действий. В то время как Atlas использует IMU, положения суставов и датчики силы для управления движением своего тела и ощущения земли для баланса, ему требуется восприятие, чтобы идентифицировать и перемещаться по препятствиям, таким как зазор и узкий луч, показанные на рисунке 1.
Рисунок 1: Это анимация показывает вращающийся вид облака точек, созданного камерой глубины на одном роботе Atlas, в то время как другой робот прыгает через его поле зрения.
Atlas использует времяпролетную камеру глубины для создания облаков точек окружающей среды со скоростью 15 кадров в секунду. Облако точек представляет собой большой набор измерений дальности. Программное обеспечение Atlas для восприятия извлекает поверхности из этого облака точек, используя алгоритм, называемый многоплоскостной сегментацией. Результаты этого алгоритма передаются в картографическую систему, которая строит модели различных объектов, которые Atlas видит с помощью своей камеры.
Облако точек представляет собой большой набор измерений дальности. Программное обеспечение Atlas для восприятия извлекает поверхности из этого облака точек, используя алгоритм, называемый многоплоскостной сегментацией. Результаты этого алгоритма передаются в картографическую систему, которая строит модели различных объектов, которые Atlas видит с помощью своей камеры.
Рисунок 2: Визуализация Atlas с выходными данными восприятия.
На рис. 2 показано, что видит Atlas, и как это восприятие используется для планирования действий. В левом верхнем углу — инфракрасное изображение, снятое камерой глубины. Белые точки на основном изображении образуют облако точек. Оранжевые контуры отмечают обнаруженные прямоугольные грани препятствий паркура, которые отслеживаются с течением времени на основе наблюдений датчика. Эти обнаруженные лица затем используются для планирования определенного поведения. Например, зеленые следы представляют собой будущий план того, где прыгать и бегать дальше.
Чтобы пройти расширенный курс паркура, мы даем роботу карту высокого уровня, на которой указано, куда мы хотим, чтобы он шел, и какие трюки он должен выполнять по пути. Эта карта не является точным геометрическим соответствием реальному курсу; это приблизительное описание, содержащее шаблоны препятствий и аннотированные действия. Atlas использует эту скудную информацию для навигации по курсу, но использует данные о реальном восприятии для заполнения деталей. Например, Атлас знает, что нужно искать ящик, на который можно запрыгнуть, и если ящик сдвинуть на 0,5 метра в сторону, то Атлас найдет его там и прыгнет туда. Если ящик отодвинется слишком далеко, система не найдет его и остановится.
Рисунок 3. Анимация, показывающая, как роботы воспринимают курс «Партнеры в паркуре».
Эта анимация представляет собой 3D-визуализацию, показывающую, что видит и планирует робот, преодолевая полосу препятствий паркура. Активно отслеживаемые объекты отображаются зеленым цветом и переходят от зеленого к фиолетовому по мере того, как они выходят из поля зрения датчиков восприятия робота. Система слежения постоянно оценивает положение объектов в мире, а навигационная система планирует зеленые шаги относительно этих объектов, используя информацию с карты.
Система слежения постоянно оценивает положение объектов в мире, а навигационная система планирует зеленые шаги относительно этих объектов, используя информацию с карты.
БИБЛИОТЕКИ ПОВЕДЕНИЯ
Каждое движение, которое Атлас выполняет во время паркура, основано на заранее созданном шаблоне с использованием оптимизации траектории. Создание библиотеки этих шаблонов позволяет нам продолжать добавлять новые возможности роботу, добавляя в библиотеку новые траектории. Учитывая запланированные цели из восприятия, робот выбирает поведение из библиотеки, которое максимально соответствует заданным целям.
Разработка поведения в автономном режиме с помощью оптимизации траектории позволяет нашим инженерам заблаговременно в интерактивном режиме изучить пределы возможностей робота и сократить объем вычислений, которые мы должны выполнять с роботом. Например, детали того, как именно робот координирует свои конечности, чтобы взлететь и согнуться для сальто назад, могут иметь большое влияние на успех из-за физических ограничений, таких как пределы срабатывания. Использование автономной оптимизации позволяет нам зафиксировать важные ограничения, подобные этому, во время разработки и адаптировать их в режиме онлайн с помощью единого контроллера общего назначения.
Использование автономной оптимизации позволяет нам зафиксировать важные ограничения, подобные этому, во время разработки и адаптировать их в режиме онлайн с помощью единого контроллера общего назначения.
Рисунок 4: Это поведение хранилища является примером сложного поведения всего тела, разработанного с использованием автономной оптимизации траектории. Наш онлайн-контроллер превращает движение шаблона в реальность.
УПРАВЛЕНИЕ С ПРОГНОЗИРОВАНИЕМ МОДЕЛИ
Определив ящики, пандусы или барьеры перед роботом и спланировав последовательность маневров для их преодоления, оставшаяся задача состоит в том, чтобы заполнить все детали, необходимые для надежной работы робота. выполнить план.
Контроллер Atlas известен как модельно-прогнозирующий контроллер (MPC), поскольку он использует модель динамики робота для прогнозирования того, как его движение будет развиваться в будущем. Контроллер работает, решая оптимизацию, которая вычисляет, что лучше всего сделать прямо сейчас для создания наилучшего возможного движения с течением времени.
Как мы описали выше, каждый шаблон в нашей библиотеке поведения предоставляет контроллеру информацию о том, как выглядит хорошее решение. Контроллер регулирует такие детали, как сила, поза и время поведения, чтобы справиться с различиями в геометрии окружающей среды, скольжением ног или другими факторами в реальном времени. Наличие контроллера, способного значительно отклоняться от шаблонных движений, упрощает процесс создания поведения, поскольку это означает, что нам не нужно иметь шаблоны поведения, соответствующие каждому возможному сценарию, с которым столкнется робот. Например, прыжок с платформы 52 см ничем не отличается от прыжка с платформы 40 см, и мы можем доверить MPC прояснение деталей.
Рисунок 5: Вид от первого лица, показывающий как восприятие, так и запланированный путь. Синие стрелки соответствуют предсказаниям MPC центра масс и импульса робота по мере его движения по курсу.
Прогностическое свойство MPC также позволяет Atlas видеть за пределами поведения. Например, зная, что за прыжком следует сальто назад, контроллер может автоматически создавать плавные переходы от одного движения к другому. Это снова упрощает задачу создания поведения, поскольку нам не нужно заранее учитывать все возможные последовательности поведения. Конечно, инновации, которые мы можем ожидать от MPC, имеют пределы. Например, попытка перейти к сальто назад из быстрого бега трусцой вперед не сработает. В общем, мы должны найти баланс между сложностью контроллера и размером библиотеки поведения.
Например, зная, что за прыжком следует сальто назад, контроллер может автоматически создавать плавные переходы от одного движения к другому. Это снова упрощает задачу создания поведения, поскольку нам не нужно заранее учитывать все возможные последовательности поведения. Конечно, инновации, которые мы можем ожидать от MPC, имеют пределы. Например, попытка перейти к сальто назад из быстрого бега трусцой вперед не сработает. В общем, мы должны найти баланс между сложностью контроллера и размером библиотеки поведения.
СОЗДАНИЕ ФУНДАМЕНТА ДЛЯ БУДУЩЕГО
Наша работа над паркуром дала нам четкое понимание того, как создавать и контролировать широкий спектр динамического поведения на Атласе (включая танец). Но что еще более важно, это дало возможность разработать расширяемую программную систему, которая будет расти вместе с нашей командой по мере того, как Atlas обретает новые возможности восприятия и изменения своей среды. Мы рады продолжить работу на этом фундаменте, расширяя возможности Atlas.
ПОДПИСАТЬСЯ НА ИНФОРМАЦИЮ
Atlas Robot
Specifications
| Weight | 80 | kg |
| Height | 1.8 | m |
| Speed | 1.5 | m/s |
| Полезная нагрузка | 11 | кг |
| Степени свободы (DOF) | 28 | |
| Navigation sensors | LIDAR and stereo vision | |
| Hydraulic Actuation | Legs | 6 per leg |
| Arms | 6 per arm | |
| Спинка | 3 для шарниров | |
| Горловина | 1 для шага |
Обзор
Многие гуманоидные приложения можно разложить на две задачи управления: контроллер уровня поведения, который выдает команды высокого уровня, и контроллер низкого уровня, который отвечает за генерацию совместных команд. Чтобы полностью использовать рабочее пространство и быть устойчивым к внешним возмущениям, контроллер нижнего уровня должен учитывать кинематику и динамику всего тела.
Чтобы полностью использовать рабочее пространство и быть устойчивым к внешним возмущениям, контроллер нижнего уровня должен учитывать кинематику и динамику всего тела.
Одним из популярных подходов к управлению человекоподобными роботами является инверсная кинематика с отслеживанием положения жестких суставов. С другой стороны, подходы, основанные на обратной динамике, получили все большее признание, обеспечивая податливые движения и устойчивость к внешним возмущениям. Однако эффективность таких методов сильно зависит от высококачественных динамических моделей, которые зачастую очень сложно создать для физического робота. Подходы инверсной кинематики требуют только кинематических моделей, которые гораздо проще создать на практике.
Управление
Предлагаемый контроллер всего тела тестируется на роботе Atlas от Boston Dynamics в рамках конкурса DARPA Robotics Challenge. Atlas имеет 28 гидравлических приводов, по 6 на каждую ногу и руку, 3 на суставы спины и 1 на наклон шеи. Наши контроллеры для ходьбы по пересеченной местности, подъема по лестнице и манипулирования всем телом предназначены для этого.
Наши контроллеры для ходьбы по пересеченной местности, подъема по лестнице и манипулирования всем телом предназначены для этого.
A. Статическая ходьба
Требуемые движения высокого уровня, такие как траектории маха ногой, генерируются с помощью пятикратных сплайнов. Заданные местоположения ступенек используются в качестве узловых точек для сплайнов.
B. Манипуляции всего тела
Во время манипулирования всем телом оператор подает серию команд, запрашивающих либо прямые углы сочленения для одной или обеих рук, либо целевые декартовы положения для одной или обеих рук. Эти команды используются для обновления желаемой позиции. Мы используем ограничения равенства в инверсной кинематической формулировке, чтобы обеспечить прямо заданные углы соединения. Для больших декартовых движений мы перемещаем желаемые местоположения через сплайны, начиная с текущей цели и заканчивая новой целью. Для небольших движений мы используем описанный выше метод «подталкивания» для точного позиционирования стопы: одиночное нажатие на клавиатуру приводит к небольшим мгновенным изменениям в желаемой инверсной кинематической позиции.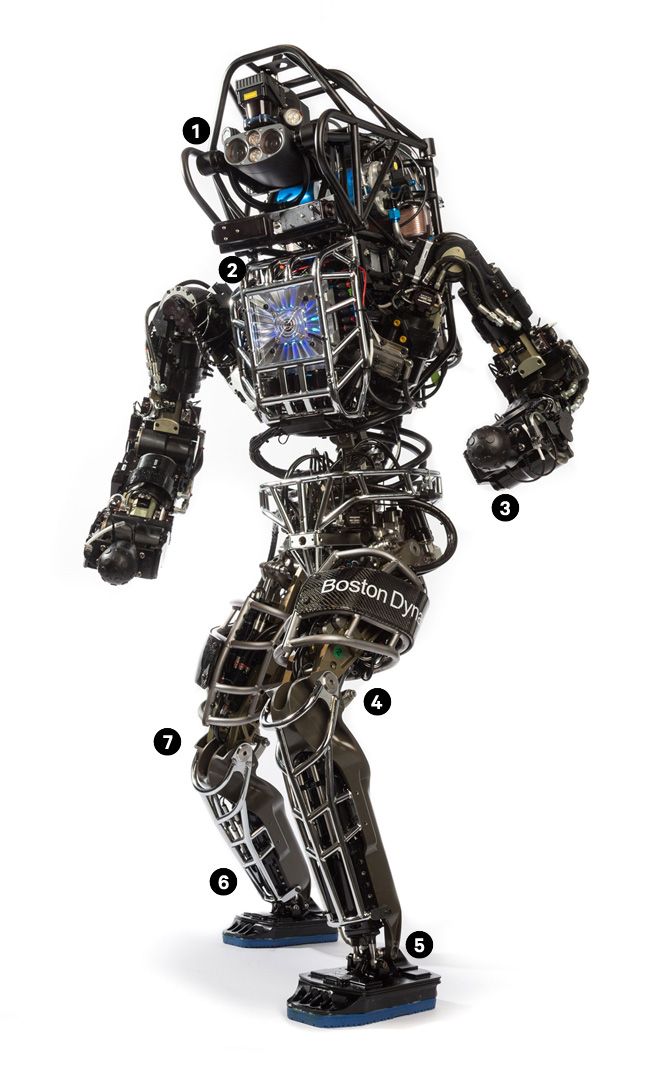 Затем мы используем коэффициенты усиления ЧР, сравнивая измеренные и инверсные кинематические положения, чтобы получить входное желаемое ускорение для инверсной динамики.
Затем мы используем коэффициенты усиления ЧР, сравнивая измеренные и инверсные кинематические положения, чтобы получить входное желаемое ускорение для инверсной динамики.
C. Управление поперечной дверью
Обход двери, как правило, является тривиальной задачей для людей, но особенно сложной задачей для роботов-гуманоидов. Обход двери можно разбить на четыре подзадачи; обнаружение двери, подойти к двери, открыть дверь и пройти через дверь.
Преобразования и системы координат, участвующие в вычислении расстояния. Текущий кадр конечного эффектора — C, а поза руки для захвата
Конечный автомат, управляемый событиями, с подзадачами в качестве состояний используется для управления автономным выполнением процесса с проверкой человеком на критических узлах. Конечный автомат запускается в состоянии обнаружения двери. Обнаружение выполняется с использованием подхода, основанного на зрении. Как только у робота есть нормаль к двери и положение ручки, происходит переход состояния, переводящий конечный автомат в состояние ходьбы к двери. В этот момент робот следует по шаговой траектории и подходит к нужному положению стойки для открытия двери. Третье состояние конечного автомата — открытие двери, состоящее из четырех подсостояний. Сначала переходим к ручке. Из-за размера руки и ручки допустимая ошибка между желаемым положением руки и фактическим положением составляет менее 2 см. Второе подсостояние — хватание за ручку. Когда пальцы касаются двери, между ручкой и ладонью все еще остается много места, а это означает, что рука будет создавать неожиданное тянущее усилие на ручке после полного захвата ручки. Таким образом, рука должна двигаться вперед примерно на 4 см при выполнении хватательного движения. Третье — открыть дверь. В этом состоянии наша система планирования движения используется для создания последовательности движений, таких как поворот ручки, вытягивание двери для открывания двери или отталкивание двери для открывания двери, а также поднятие рычага для предотвращения открывания двери. повторное закрытие.
В этот момент робот следует по шаговой траектории и подходит к нужному положению стойки для открытия двери. Третье состояние конечного автомата — открытие двери, состоящее из четырех подсостояний. Сначала переходим к ручке. Из-за размера руки и ручки допустимая ошибка между желаемым положением руки и фактическим положением составляет менее 2 см. Второе подсостояние — хватание за ручку. Когда пальцы касаются двери, между ручкой и ладонью все еще остается много места, а это означает, что рука будет создавать неожиданное тянущее усилие на ручке после полного захвата ручки. Таким образом, рука должна двигаться вперед примерно на 4 см при выполнении хватательного движения. Третье — открыть дверь. В этом состоянии наша система планирования движения используется для создания последовательности движений, таких как поворот ручки, вытягивание двери для открывания двери или отталкивание двери для открывания двери, а также поднятие рычага для предотвращения открывания двери. повторное закрытие.
C. Подъем по лестнице
Подъем по лестнице
Контроллер, лежащий в основе подъема по лестнице, аналогичен контроллеру, используемому для манипулирования, но большая часть движения запрограммирована заранее, и оператор контролирует только окончательное размещение рук и ног. Для каждой конечности рука или нога автоматически перемещается примерно в нужное положение, помещая ее относительно другой руки или ноги. Правильная высота по вертикали определяется автоматически с использованием датчиков силы для определения контакта ног и определения положения, когда известно, что контакт уже произошел. Перенос всего веса на пальцы ног делает робота уязвимым для проскальзывания при вращении, вызывая неожиданные повороты вокруг вертикальной оси. Чтобы правильно разместить руки на следующей ступеньке, чтобы восстановиться после таких вращений, мы должны повернуть обратное кинематическое решение, чтобы оно соответствовало измеренной ориентации. Поэтому мы периодически поворачиваем обратное кинематическое решение таким образом, чтобы ноги совпадали с измеренной ориентацией ног, позволяя роботу переориентировать верхнюю часть тела в сторону лестницы и правильно достигать целей в реальном мире. Было бы предпочтительнее постоянно обновлять ориентацию, но периодические обновления были проще с точки зрения разработки программного обеспечения. Кроме того, периодические обновления менее подвержены описанной выше проблеме «условия преследования».
Было бы предпочтительнее постоянно обновлять ориентацию, но периодические обновления были проще с точки зрения разработки программного обеспечения. Кроме того, периодические обновления менее подвержены описанной выше проблеме «условия преследования».
На этих фотографиях показан робот Atlas, взбирающийся по верхней половине той же лестницы, которая используется в DRC. Снимки делались каждые 13 секунд. Верхний ряд показывает изменение положения стрелок крюка, а нижний ряд показывает подъем на одну ступеньку. Большинство лазающих движений запрограммированы. После грубого изменения положения каждой конечности оператор может точно отрегулировать ее конечное положение с помощью команд «подталкивания», которые представляют собой небольшие смещения в декартовом пространстве.
Способности
В конкурсе робототехники Darpa 2015 года Атлас смог выполнить все восемь задач следующим образом:
- Вождение внедорожника на объекте.
- Путешествуйте в пешем порядке по щебню.

- Удалите мусор, блокирующий вход.
- Откройте дверь и войдите в здание.
- Поднимитесь по промышленной лестнице и пройдите по промышленной дорожке.
- Используйте инструмент, чтобы пробить бетонную панель.
- Найдите и закройте клапан рядом с протекающей трубой.
- Подсоедините пожарный шланг к стояку и включите вентиль.

Обсуждение
Задача обхода двери может надежно выполняться в широком диапазоне неструктурированных сред с помощью описанных выше алгоритмов восприятия и планирования движения. В дальнейшем планируется ускорить работу планировщика движения за счет повторного использования ранее сгенерированных траекторий в качестве исходных предположений. Кроме того, поскольку текущий планировщик движения включает только кинематические ограничения, контроллер нижнего уровня должен медленно следовать траектории, чтобы избежать динамической нестабильности. Все измерения уровня суставов ног на роботе Atlas, такие как позиционирование, скорость и крутящий момент, являются предварительной передачей. Этот выбор конструкции аппаратного обеспечения уменьшает дрожание в управлении шарниром низкого уровня, но создает проблемы для прямой кинематики и управления крутящим моментом. Неизмеренное трение значительно снижает эффективность управления крутящим моментом. Для достижения более точного отслеживания положения и управления усилием необходима лучшая технология оценки состояния.
Этот выбор конструкции аппаратного обеспечения уменьшает дрожание в управлении шарниром низкого уровня, но создает проблемы для прямой кинематики и управления крутящим моментом. Неизмеренное трение значительно снижает эффективность управления крутящим моментом. Для достижения более точного отслеживания положения и управления усилием необходима лучшая технология оценки состояния.
Аналогичные характеристики
Просмотреть все технические характеристики
Спецификация проекта
LOLA
Гуманоид с улучшенными характеристиками, отличающийся модульной мультисенсорной конструкцией суставов с бесщеточными двигателями.
Этот прототип может автономно перемещаться в помещении благодаря сложной системе визуального распознавания…
спецификация проекта
WABIAN-2R
Двуногий робот-гуманоид, который может использоваться в качестве симулятора движения человека, то есть робот может выполнять упражнения наравне с человеком. существа тестируют разрабатываемое социальное оборудование вместо .