Афтепати Google I/O обслуживает робот-бармен (немного фото+видео). Робот бармен
робот-бармен на Raspberry Pi и Go / Хабр
Пару лет назад я наткнулся на проект Bartendro на Kickstarter. Мне понравилась идея, и я решил, что идеальное применение для моего недавно приобретенного Raspberry Pi найдено. Я прикинул какие детали понадобятся, и приступил к DIY реализации робота-бармена. Кратко расскажу что из этого получилось.
Hardware
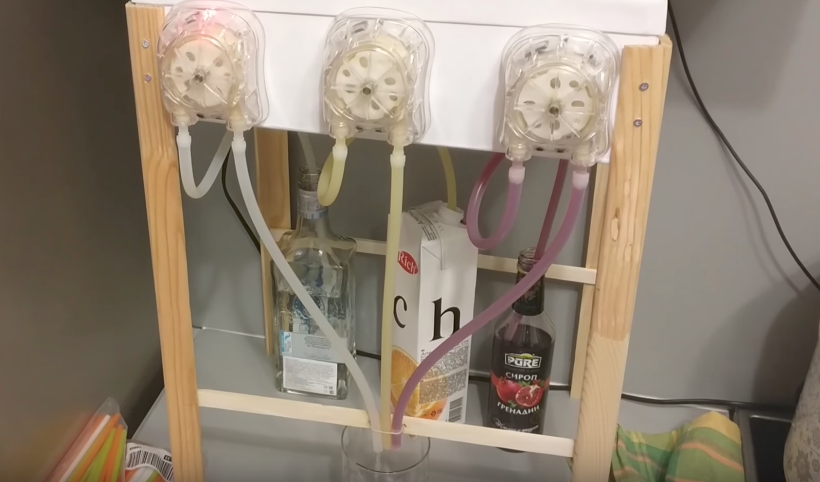
Основной элемент всей конструкции, конечно — насосы. В оригинальном проекте Bartendro используются перистальтические насосы собственной разработки (кстати, весь проект доступен в github).Перистальтический насос — это такой насос который толкает по трубке её содержимое, как будто тюбик с пастой выдавливает. Соответственно, один конец опускаем в бутылку, а второй в стакан. Гифка с Википедии с принципом действия:
 Похожие на оригинальные из Bartendro насосы есть в продаже на Aliexpress. Практика показала, что они хороши в эксплуатации, т.к. у них снимается передняя панель с трубкой — очень удобно мыть после застолья.
Похожие на оригинальные из Bartendro насосы есть в продаже на Aliexpress. Практика показала, что они хороши в эксплуатации, т.к. у них снимается передняя панель с трубкой — очень удобно мыть после застолья.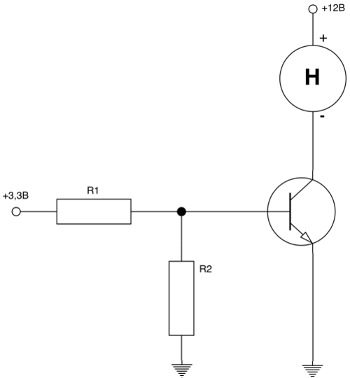 Для выбора транзистора надо чтобы напряжение коллектор-эммитер и максимальный ток коллектора у него был минимум в 1.5-2 раза выше необходимых. Я выбрал BDX33B, у него напряжение коллектор-эмиттер — 80В, а максимальный ток коллектора — 10A, что с запасом хватит для насоса со стартовым током 2А и напряжением 12В. Для того чтобы открыть транзистор, на базе надо получить не больше 2.5В. Считаем делитель в каком-нибудь онлайн-калькуляторе — получаем R1=150 Ом, R2=300 Ом.
Для выбора транзистора надо чтобы напряжение коллектор-эммитер и максимальный ток коллектора у него был минимум в 1.5-2 раза выше необходимых. Я выбрал BDX33B, у него напряжение коллектор-эмиттер — 80В, а максимальный ток коллектора — 10A, что с запасом хватит для насоса со стартовым током 2А и напряжением 12В. Для того чтобы открыть транзистор, на базе надо получить не больше 2.5В. Считаем делитель в каком-нибудь онлайн-калькуляторе — получаем R1=150 Ом, R2=300 Ом.В качестве «свистелок» я добавил три светодиода, подключенных к трем другим GPIO пинам, которые будут обозначать работающий моторчик, а также понадобятся при визуализации синтезатора речи. На выходы GPIO можно повесить максимальную нагрузку 15 мА на пин, или 50 мА суммарно. Поэтому подключаю светодиоды через резисторы по 300 Ом, ток в этом случае будет ~4 мА на пин.
Теперь можно идти в ближайший магазин радиодеталей и пробовать собирать.
Software
Raspberry Pi вообще довольно медленная штука — например, Django, на котором я изначально хотел сделать веб-приложение, запускается несколько минут. Поэтому я решил отказаться от него в пользу чего-нибудь легковесного, а именно — Go. Он быстро компилируется, кросс-компиляция под linux-arm на моем ПК занимает около 20 секунд. На выходе получаем небольшого размера бинарник, который статически собран и несет внутри все зависимости. Его можно сразу rsync-ом копировать на raspberry pi и проверять. Очень удобно для таких небольших приложений. Параметры кросс-компилияции под linux-arm выглядят так:GOOS=linux GOARCH=arm GOARM=6 go build У разных версий Raspberry Pi разные версии ARM. Узнать свою версию можно в /proc/cpuinfoТак как у насосов нет никаких датчиков объема налитого, но известна пропускная способность, то объем можно контролировать через время работы насоса. Эмперическим путем я выяснил — чтобы налить 100 миллилитров, надо насос держать включенным 30 секунд. Получается нужно написать приложение, которое по команде, по очереди включает насосы на определенное время. В данной реализации подразумевается, что Наливатор умеет делать только один коктейль, то есть у него есть только одна кнопка — «Налить».
Я сделал конфиг в котором описаны подключенные насосы и коктейль, который нужно наливать.
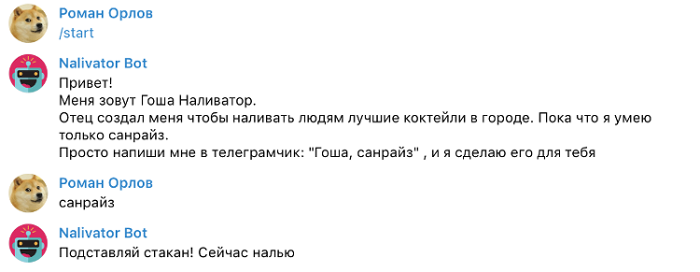
Формат вот такой{ "cname": "санрайз", "pumps": [ { "name": "Tequila", "pump_pin": 17, "led_pin": 23, "duration": 17 }, { "name": "Juice", "pump_pin": 22, "led_pin": 25, "duration": 49 }, { "name": "Grenadine", "pump_pin": 27, "led_pin": 24, "duration": 7 } ] } Этот конфиг читает Наливатор при запуске, и понимает какой пин на какое время нужно включать. Для работы с GPIO я использовал библиотеку go-rpigpio:Код наливки совсем простой for _, v := range CurrentPumps.Pumps { log.Printf("Nalivaem %s ;duration = %v; GPIO = %v", v.Name, v.Duration, v.Pump_pin) //pump pin open p, err := rpi.OpenPin(v.Pump_pin, rpi.OUT) if err != nil { panic(err) } defer p.Close() //led pin open l, l_err := rpi.OpenPin(v.Led_pin, rpi.OUT) if l_err != nil { log.Printf("LED - Can't set LED pin to output") } defer l.Close() // pump on p.Write(rpi.HIGH) //led on l.Write(rpi.HIGH) time.Sleep(time.Second * time.Duration(v.Duration)) // pump off p.Write(rpi.LOW) //led off l.Write(rpi.LOW) } } Весь код в гитхабе — github.com/fote/nalivator9000Когда пришло время испытаний, я пригласил друзей провести нагрузочное тестирование, но перед их приходом понял, что веб-интерфейс это не совсем удобно — он не доступен из интернета, а подключаться к запароленной wi-fi сети, вбивать IP-адрес в браузере… слишком сложно. Тогда я добавил telegram-бота, который ждёт что ему напишут имя коктейля и наливает его. Я не буду описывать как создать бота, т.к. уже есть множество хороших статей на эту тему, в том числе и для Golang.
Также я решил добавить синтез речи, воспользовавшись Yandex SpeechKit. API этого сервиса очень прост, а лицензионное соглашение позволяет пользоваться им бесплатно в некоммерческих целях. Перед отправкой сообщения от telegram-бота, я прогоняю фразу через SpeechKit, в ответ получаю .wav-файл и воспроизвожу его через подключенный по 3.5mm-jack динамик.
Заключение
Тестирование Наливатора прошло успешно — тестировщики остались довольны и оставили много фичереквестов.Напоследок видео работы:
За ваше здоровье!
habr.com
Робот-бармен делает 800 коктейлей за ночь
Разработчики робота Nino утверждают, что возможности их творения в смешивании коктейлей огромны: механический бармен может быстро создать напиток по любому предложенному клиентом рецепту.
Всего в распоряжении Nino 170 бутылок с алкоголем, из которого он способен сделать любой классический вариант коктейля или смешать что-то новое. Заказы робот принимает через мобильное приложение, где клиенты могут сами придумывать оригинальные рецепты и выбирать варианты уже существующих.
Выглядит Nino, как и его прототипы 2013 года Bionic Bar: две роборуки, одна из которых смешивает, а другая – наливает и подает коктейли. Эти механизмы уже несколько лет работают в заведениях отелей и круизных лайнеров Royal Caribbean. За это время им удалось сделать около миллиона напитков.
Крепится система к барной стойке, сделанной из искусственного камня кориана. Над роботом располагаются бутылки с алкоголем, а позади – экраны со списком заказов и временем выполнения. Сделать напиток для Nino, по словам создателей из компании Makr Shakr, – дело буквально нескольких секунд.
Такой робот не сможет поболтать с клиентами, но существенно сэкономит их время и позволит вволю покреативить в изобретении собственных алкогольных рецептов. Внешний вид Nino далек от человеческого, но разработчики взяли за основу движения людей. В частности, итальянского хореографа Марко Пелле. То, как он двигается, было записано на видео для последующего программирования системы на базе этих материалов.
Создатель проекта – итальянский инженер и изобретатель Карло Ратти – утверждает, что Nino смешивает напитки быстрее и эффективнее, чем человек. Впрочем, робот-бармен не создан для того, чтобы заменить работников за стойкой. Одна из его задач – сделать взаимодействие роботов и людей на бытовом уровне более привычным. Ведь вскоре подобная техника, по мнению Ратти, будет повсеместно применятся в самых разных сферах.
Читайте также: «В Японии открыли «Странное кафе» с роботом вместо бармена»
robo-hunter.com
Робот-бармен NALIVATOR-9000 - Linux admin blog
Кросс-пост моей статьи на Хабрахабре. Пару лет назад я наткнулся на проект Bartendro на Kickstarter. Мне понравилась идея, и я решил, что идеальное применение для моего недавно приобретенного Raspberry Pi найдено.
Я прикинул какие детали понадобятся, и приступил к DIY реализации робота-бармена. Вот что в итоге получилось:
Hardware
Основной элемент всей конструкции, конечно - насосы. В оригинальном проекте Bartendro используются перистальтические насосы собственной разработки (кстати, весь проект доступен в github).Перистальтический насос - это такой насос который толкает по трубке её содержимое, как будто тюбик с пастой выдавливает. Соответственно, один конец опускаем в бутылку, а второй в стакан. Гифка с Википедии с принципом действия:
Похожие на оригинальные из Bartendro насосы есть в продаже на Aliexpress. Практика показала, что они хороши в эксплуатации, т.к. у них снимается передняя панель с трубкой - очень удобно мыть после застолья.
У Raspberry Pi на плате расположены GPIO разъемы. С помощью них посылаются или принимаются сигналы “1” или “0”, 3,3В и 0В, соотвественно. В спецификации к насосу указано, что его рабочее напряжение - 12В, и “малиновых” 3.3В здесь будет мало. Поэтому для работы понадобится еще блок питания, а управлять им можно с помощью транзисторного переключателя. Итоговая схема выглядит так:
Для выбора транзистора надо чтобы напряжение коллектор-эммитер и максимальный ток коллектора у него был минимум в 1.5-2 раза выше необходимых. Я выбрал BDX33B, у него напряжение коллектор-эмиттер - 80В, а максимальный ток коллектора - 10A, что с запасом хватит для насоса со стартовым током 2А и напряжением 12В. Для того чтобы открыть транзистор, на базе надо получить не больше 2.5В. Считаем делитель в каком-нибудь онлайн-калькуляторе - получаем R1=150 Ом, R2=300 Ом.
В качестве “свистелок” я добавил три светодиода, подключенных к трем другим GPIO пинам, которые будут обозначать работающий моторчик, а также понадобятся при визуализации синтезатора речи. На выходы GPIO можно повесить максимальную нагрузку 15 мА на пин, или 50 мА суммарно. Поэтому подключаю светодиоды через резисторы по 300 Ом, ток в этом случае будет ~4 мА на пин.
Теперь можно идти в ближайший магазин радиодеталей и пробовать собирать.
Software
Raspberry Pi вообще довольно медленная штука - например, Django, на котором я изначально хотел сделать веб-приложение, запускается несколько минут. Поэтому я решил отказаться от него в пользу чего-нибудь легковесного, а именно - Go. Он быстро компилируется, кросс-компиляция под linux-arm на моем ПК занимает около 20 секунд. На выходе получаем небольшого размера бинарник, который статически собран и несет внутри все зависимости. Его можно сразу rsync-ом копировать на raspberry pi и проверять. Очень удобно для таких небольших приложений. Параметры кросс-компилияции под linux-arm выглядят так: $ GOOS=linux GOARCH=arm GOARM=6 go build У разных версий Raspberry Pi разные версии ARM. Узнать свою версию можно в /proc/cpuinfoЯ сделал конфиг в котором описаны подключенные насосы и коктейль, который нужно наливать.
{ "cname": "санрайз", "pumps": [ { "name": "Tequila", "pump_pin": 17, "led_pin": 23, "duration": 17 }, { "name": "Juice", "pump_pin": 22, "led_pin": 25, "duration": 49 }, { "name": "Grenadine", "pump_pin": 27, "led_pin": 24, "duration": 7 } ] } Этот конфиг читает Наливатор при запуске, и понимает какой пин на какое время нужно включать. Для работы с GPIO я использовал библиотеку go-rpigpio: for _, v := range CurrentPumps.Pumps { log.Printf("Nalivaem %s ;duration = %v; GPIO = %v", v.Name, v.Duration, v.Pump_pin) //pump pin open p, err := rpi.OpenPin(v.Pump_pin, rpi.OUT) if err != nil { panic(err) } defer p.Close() //led pin open l, l_err := rpi.OpenPin(v.Led_pin, rpi.OUT) if l_err != nil { log.Printf("LED - Can't set LED pin to output") } defer l.Close() // pump on p.Write(rpi.HIGH) //led on l.Write(rpi.HIGH) time.Sleep(time.Second * time.Duration(v.Duration)) // pump off p.Write(rpi.LOW) //led off l.Write(rpi.LOW) } } Весь код в гитхабе - https://github.com/fote/nalivator9000Когда пришло время испытаний, я пригласил друзей провести нагрузочное тестирование, но перед их приходом понял, что веб-интерфейс это не совсем удобно - он не доступен из интернета, а подключаться к запароленной wi-fi сети, вбивать IP-адрес в браузере… слишком сложно. Тогда я добавил telegram-бота, который ждёт что ему напишут имя коктейля и наливает его. Я не буду описывать как создать бота, т.к. уже есть множество хороших статей на эту тему, в том числе и для Golang.
Также я решил добавить синтез речи, воспользовавшись Yandex SpeechKit. API этого сервиса очень прост, а лицензионное соглашение позволяет пользоваться им бесплатно в некоммерческих целях. Перед отправкой сообщения от telegram-бота, я прогоняю фразу через SpeechKit, в ответ получаю .wav-файл и воспроизвожу его через подключенный по 3.5mm-jack динамик.
Заключение
Тестирование Наливатора прошло успешно - тестировщики остались довольны и оставили много фичереквестов.За ваше здоровье!
Оригинал: https://habrahabr.ru/post/327220/
4te.me
Somabar – ваш персональный электронный бармен
Многие люди любят пропустить после утомительного рабочего дня пару коктейлей. Но как быть, если не хочется заморачиваться с барным оборудованием и изучением коктейльных рецептов? Робот-бармен Somabar сделает всё за вас!
Somabar очень прост в использовании. Для того чтобы сделать себе коктейль, вам необходимо проделать всего несколько простых шагов. Скачать официальное приложение Somabar на свой смартфон. Приобрести отдельные ингредиенты для своих любимых коктейлей и наполнить ими специальные стеклянные контейнеры (которые, кстати, можно мыть в посудомоечной машине). После этого вы выбираете в приложении необходимый коктейль из более чем 300 вариантов, устанавливаете в Somabar правильный коктейльный бокал (хайбол, рокс, харрикейн и так далее), и в течение нескольких секунд ваш коктейль будет готов.
Никаких больше плясок по кухне с шейкерами, липких пальцев от сиропа и прочих добавок, не придётся больше отмерять джиггером правильное количество ингредиентов. Всё это на себя берёт Somabar.
Если вы являетесь противником алкоголя, приятной новостью для вас станет тот факт, что Somabar легко справится и с безалкогольными коктейлями, рецепты которых также можно будет найти в официальном приложении.
В данный момент разработчики устройства успешно протестировали первый опытный образец Somabar и готовы запустить его в массовое производство. Для этого им было нужно собрать на площадке Kickstarter 50 000 долларов. Кампания по сбору средств превзошла все ожидания организаторов, и робот-бармен очень быстро собрал более 110 000 долларов пожертвований.
Если вы хотите заполучить в свой дом такого умного автоматического бармена, то приготовьтесь раскошелиться на 399 долларов. Именно столько стоит самая дешёвая модель устройства в данный момент. После поступления в продажу его цена вырастет на 100 долларов. Первая партия Somabar отправится к своим новым владельцам уже в июле 2015 года.
hi-news.ru
Как люди пытаются научить роботов наливать выпивку и правильно смешивать коктейли — FURFUR

FURFUR разбирается в роботах-барменах и их современных способностях
- 21 ноября 2013 в 16:14
- 3698
Роботы и дроны постепенно проникают в жизнь человека, становясь частью его повседневного быта. Здравоохранение, образование, строительство, военные операции, сфера обслуживания в диапазоне от курьерской службы до уборки — с каждым годом область их применения становится все шире. Мы решили выяснить, оказывает ли технологический прогресс влияние на барную культуру, для чего провели ревизию существующих сегодня роботов-барменов.

Картонный робот-бармен. фото 1930-х годов
Идея использовать на позиции бармена роботизированный автомат появилась достаточно давно — первым в мире роботом, в обязанности которого вменялось наполнять бокалы, стал Эрни, спроектированный еще в 1980-х. На YouTube можно даже найти архивный видеоролик в характерной мутно-желтой палитре, в котором роботендер (название в неофициальной классификации роботов, спроектированных для работы с алкоголем) демонстрирует свое высокое искусство. Надо сказать, что с тех пор разработчики в области барной и алкоробототехники продвинулись не очень далеко.
Робот Mr. Asahi, разработанный как элемент рекламной кампании для одноименного пивного бренда, наглядно демонстрирует прогресс, достигнутый в этой области. Mr. Asahi был выпущен в 2008 году, но выглядит при этом как музейный робот из мультфильма «Ну, погоди!» и обладает весьма ограниченным функционалом — в его обязанности входит откупоривание бутылок открывашкой и розлив их содержимого по бокалам, что, конечно, не очень впечатляет.

Более современный Bartrendo выглядит как прокачанный самогонный аппарат и может приготовить пару сотен напитков за час. Для смешивания машина использует перистальтические насосы, которые точно дозируют компоненты (соки, алкоголь, сиропы) в нужных пропорциях, а для заказа — смартфон и связь по Wi-Fi. Проект уже собрал 200 тысяч долларов на Kickstarter и сейчас находится на стадии запуска в серийное производство.
Схожий принцип заложен и в автомат Inebriator — только компоненты подаются не через насос, а наливаются из установленных сверху бутылок с алкоголем в разъезжающий по рельсам стакан, ну а в смешивании стоит полагаться на себя.
Карл — человекоподобный робот, построенный инженером мехатроники Беном Шефером из частей списанных промышленных роботов для работы в собственном баре. Карл носит франтовскую бабочку, ловко управляется с шейкером и даже способен вступать с клиентами в непродолжительный диалог (в основном сообщать информацию о коктейле, его истории и особенностях). Вряд ли робот может поддержать интеллектуальный уровень беседы, но для пьяного собеседника его разговорного репертуара наверняка будет достаточно.

Конечно, пока о роботизированных барменах не приходится говорить как о каком-то крупном технологическом феномене: за исключением нескольких серьезных проектов основная масса — это разработки робототехников-любителей, собирающих аппараты из подручных материалов в гараже. Зато в рамках этого нишевого подразделения явление приобрело настолько серьезный масштаб, что ему понадобилась объединяющая площадка для демонстрации.
Конференции BarBot и Roboexotica

BarBot — ежегодное мероприятие, проходящее в Сан-Франциско в рамках крупнейшей на данный момент в мире выставки любительской робототехники Robogames. Специализация предельно узкая — роботы и алкоголь, при этом функциональность экспонатов задвигается на второй план, главное — оригинальная идея либо феерическое исполнение. Одного взгляда достаточно, чтобы понять: участники BarBot не претендуют на то, чтобы нести флаг технологической революции и собираются вместе скорее ради веселья. Впрочем, несмотря ни на что, здесь обнаруживаются весьма интересные экспонаты:

Мартини Шредингера
Мартини Шредингера — объект, который роботом можно назвать с большой натяжкой. На вид это обычная деревянная коробка, а на самом деле — шутливая аллюзия к известному физико-математическому парадоксу: по задумке автора, невозможно узнать, какое количество мартини в стакане, пока не откроешь ящик.

ThinBot
ThinBot — роботизорованный оммаж детективу Дэшила Хэммета, Тонкий человек, который умеет смешивать любимые коктейли главных героев книги — супругов Чарльз.
пылесос
Подносчик пивных снарядов, напоминающий пилотную модель пылесоса «Румба».

SW500
И нечто под названием SW500, наливающее алкоголь пользователю в зависимости от его танцевальных способностей.

CHAPEK
Chapek — настоящий ветеран и практически символ выставки. В BarBot он участвует уже в пятый раз и, по словам его автора, «постоянно находится в состоянии доработки». Chapek — медлительный (бокал мартини он наливает пару минут), безвозвратно устаревший, громоздкий и некрасивый, зато у него, как у бывалого бармена, всегда есть в запасе пара шуток: «Hey, have you ever dated a robot before? I used to date a vacuum cleaner. It sucked».
BarBot — на самом деле не единственное мероприятие подобного формата. Венский фестиваль Roboexotica заметно старше — он проводится аж с 1999 года и собирает под одной крышей не менее безумных участников.


Makr Shakr — самый впечатляющий и чуть ли не единственный проект роботизированного бармена, которым занимается действительно крупная компания. Точнее, группа компаний — авторами технической части являются инженеры Массачусетского технологического института, а в финансовых и рекламных партнерах проекта числятся гиганты алкогольной и пищевой индустрии Bacardi и Coca-Cola.
По виду Makr Shakr сложно определить как устройство, смешивающее напитки, скорее он напоминает автомобильный конвейер из рекламы иномарок. Впрочем, несмотря на массивность и футуристичный вид, с задачей приготовления коктейлей робот справляется очень ловко: клиент заказывает напиток через приложение (в коктейльной карте более 100 пунктов, также присутствует возможность добавить собственный рецепт), после чего механические руки смешивают ингредиенты, разливают по стаканам и направляют по конвейерной ленте. Makr Shakr обладает еще одной важной функцией — он контролирует количество выпитого клиентом и, если видит, что он перепил, наливает меньше. Впрочем, алгоритм оценки не разглашается.
Makr Shakr достаточно убедительно демонстрирует те преимущества, которыми будут обладать последующие, более сложные модели роботов перед человеком — он самостоятельный, сверхбыстрый, точный и эффективный. Но даже несмотря на это, говорить о том, что бармены в XXI веке станут жертвами машин, конечно же, не приходится. Несмотря на технический прогресс, достигнутый в области робототехники, сфера искусственного интеллекта все еще находится в неразвитом состоянии. Вот когда робот вместо того, чтобы контролировать количество выпитого, будет пить вместе с клиентом и говорить по душам вместо того, чтобы давать справку о напитке, это будет прорыв. А пока нас будет развлекать робот-«пивная банка».
www.furfur.me
Афтепати Google I/O обслуживает робот-бармен (немного фото+видео) / Хабр
Да, на Хабре уже пару раз публиковались новости о роботах-барменах, которые отлично выполняют свою работу. Надо думать, что через некоторое время подобные устройства появятся в обычных барах и ресторанах (возможно, в качестве помощника для бармена-человека). Ну, а пока роботы-бармены обслуживают посетителей технологических выставок и пресс-конференций. На афтепати Google I/O участников события развлекал и поил Makr Shakr, интерактивный робот-бармен.
Принцип работы устройства достаточно простой:
1. Заказываем напиток посредством использования мобильного приложения; 2. Ингредиенты коктейля добавляются посредством диспенсера; 3. «Рука» робота добавляет необходимые элементы коктейля, вроде лимона, или смешивает коктейль; 4. Напиток отсылается к заказавшему его на конвейере.
Само собой, для удобства «клиента», прогресс приготовления напитка показан на дисплее, в режиме реального времени. Вы можете видеть, сколько человек перед вами в очереди, примерное время ожидания заказа, плюс оповещение о готовности.
Кроме всего прочего, можно видеть, какие напитки наиболее популярны среди клиентов. Заказчик также может предлагать улучшение коктейля, если есть такая необходимость.
Самое интересное то, что сам проект Makr Shakr не ставит своей целью замену барменов-людей. Цель немного другая: изучение влияние технологии на некоторые привычные для нас элементы социальной жизни, вроде посещения бара.
habr.com
РОБОТ - БАРМЕН | sibac.info
АННОТАЦИЯ
В статье описан план создания и реализации автоматизированного устройства розлива напитков. Проект рассчитан на 2 года. В конечном итоге планируется внедрить Робота-бармена в заведение Томска. Проектом занимается один студент, проект спонсируется за личный счет.
Ключевые слова: робот, бармен, автоматизация, робот-HR, напитки, мехатроника, стенд, робот-бармен, интерфейс, взаимодействие с внешим миром, робот-помощник, инноватика.
Роботы-помощники – это передавая отрасль развития робототехники. Все больше бытовые и развлекательные роботы внедряются в нашу жизнь. По анализу специалистов это самая прибыльная отрасль робототехники на сегодняшний день. Сфера роботов-барменов в России абсолютно свободна. Да и в мировой практике всего несколько экземпляров таких устройств. По нашим расчетам есть большой шанс создания презентабельного устройства за умеренную стоимость, которое найдет своего потребителя на рынке развлечений.
С помощью таких аппаратов можно будет, к примеру, обслуживать клиентов в барах, ночных клубах, что снизит нагрузку на барменов и уменьшит очереди, за счет того, что данный стенд с антропоморфным торсом можно будет располагать в любом месте заедания. Также такое устройство привлечет большое внимание “неискушенных” российских потребителей данной услуги.
Робот-бармен - это сложный комплекс разного рода систем. Системы управления, коммуникации, датчиков, подсчета тары.
Целью данной работы является разработка, создание и внедрение для получения прибыли данного роботизированного комплекса. Для реализации поставленной цели, были определены следующие задачи:
- Разработка всей системы
- Подбор компонентов
- Построение робота
- Написание программного обеспечения
- Проведение экспериментальных проверок
- Внедрение в среду
Разработка системы.
Аппарат имеет вид промо-стойки, на которой располагается торс антропоморфного робота с двумя манипуляторами- “руками”. В стойке спрятаны: склад с тарой, резервуар с напитками и часть электроники. Посуда выдается на стойку по средством небольшого лифта, манипулятор берет стакан и наполняет его другой рукой, в которой установлен шланг для подачи напитка, открытие и закрытие клапана шланга контролирует электронный ключ. Во время наливания оба манипулятора постепенно наклоняются, что позволяет избежать возникновение пены. По завершению наполнения манипулятор располагает стакан в определенное место, после чего световые и звуковые индикации подают сигнал о завершении процедуры. Процесс запускается после того как купюроприемник получил определённую сумму и подал сигнал ЦП. Функциональная схема показывает взаимодействие робота с окружающей средой (рис.1)
Рисунок 1. Функциональная схема работы устройства
Рисунок 2. Структурная схема устройства
Основные блоки устройства изображены на рисунке 2. В качестве центрального процессора используется Raspberry Pi3, он позволяет управлять множеством приводов, получать сигналы с большого количества датчиков, быстро реагирует на изменения условий среды, имеет возможность подключения системы технического зрения, так как имеет встроенный видеочип с хорошими параметрами, поддерживает прием и обработка FullHD видеопотока. Сигнал о начале работы поступает от купюроприемника со своим встроенным процессором. Система подачи тары может иметь обратную связь, которая сообщит ЦП о том, что тара кончается. Либо можно сделать проще и дешевле, во время загрузки тары будет нажиматься концевик, который сигнализирует об обновлении магазина тары, а далее робот будет отчитывать количество стаканов от заданного, но при загрузке обязательно нужно будет пополнять на определение количество, всегда одинаковое, которое хранится в системе. Система подачи тары имеет вид лифта, стаканы располагаются горизонтально и сервоприводом поднимаются один за другим на уровень промо-стойки. Система розлива есть ни что иное как тара, в которой под давлением находится напиток и электронный ключ, который по сигналу открывает клапан и в патрубок поступает жидкость. Один из вариантов обратной связи, это дальномер, который будет сигнализировать о наполненности стакана, либо опытном путем будет подобрано время розлива и угол открытия клапана. Более вероятно оснащение дальномером одного из манипуляторов, так как со временим работы давление в таре будет меняться и скорость розлива будет меняться. Система манипуляторов состоит из 7 приводов. По 3 на каждую “руку”; из них по 2 в плечевом суставе и по 1 в локтевом. И один на кисти, у манипулятора, удерживающего стакан. Так как одна из основных целей привлечение внимания, робот оборудован различными световыми и звуковыми эффектами, которые изменяются в процессе работы.
Список литературы:
- Robotoved Прошлое и будущее робототехники [Электронный ресурс] - Режим доступа: Свободный http://robotoved.ru/future_and_past_robotics/ (Дата обращения: 01.12.2017)
- Амперка Ресурс электронных компонетов [Электронный ресурс] - режим доступа: Свободный http://amperka.ru/product/raspberry-pi-3-model-b (Дата обращения: 02.12.2017)
sibac.info