Содержание
Робот-гепард компании Boston Dynamics устанавливает мировой рекорд скорости
Главная
» Новости
» Робот-гепард компании Boston Dynamics устанавливает мировой рекорд скорости
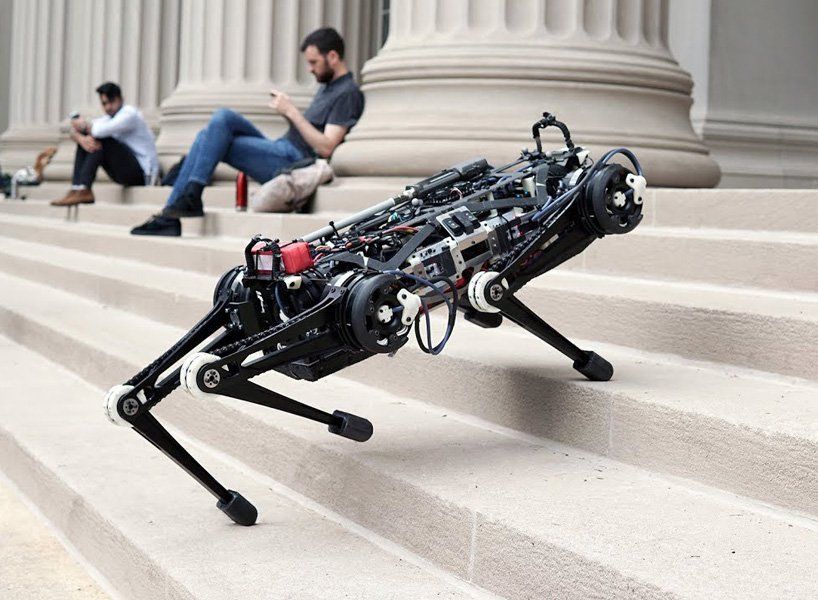
Около года назад на страницах нашего сайта мы рассказывали о начале разработки известной робототехнической компанией Boston Dynamics нового робота, двигательная система которого скопирована с опорно-двигательной системы гепарда, самого быстрого животного на земном шаре. Благодаря такой двигательной системе и новый робот должен стать самым быстрым среди роботов. Буквально вчера, компания Boston Dynamics и Управление перспективных исследовательских программ Пентагона DARPA опубликовали видео, на котором опытный прототип робота-гепарда развивает скорость почти 30 км/ч, устанавливая мировой рекорд скорости передвижения для роботов с конечностями.
Глядя на видео, можно заметить, что специалисты компании не зря называют нового робота гепардом. Во время бега робот не только использует свои ноги, но и при каждом шаге изгибает спину, точно так, как это делают при беге четвероногие животные. Бег робота, который можно увидеть на видео, является только началом. В ближайшие месяцы специалисты Boston Dynamics планируют внести в конструкцию робота целый ряд усовершенствований, которые позволят ему передвигаться намного стремительней:
Бег робота, который можно увидеть на видео, является только началом. В ближайшие месяцы специалисты Boston Dynamics планируют внести в конструкцию робота целый ряд усовершенствований, которые позволят ему передвигаться намного стремительней:
«Скорость в 30 км/ч, развитая роботом, хоть и является большим успехом, но это не конечная цель, к которой мы стремимся. Нашей конечной задачей является разработка полнофункционального робота, способного самостоятельно передвигаться по сложной пересеченной местности и гораздо быстрее прототипа» — рассказывает доктор Альфред Рицци (Dr. Alfred Rizzi), ведущий ученый компании Boston Dynamics и руководитель данного проекта. — «Мы продолжим работу и добьемся того, что бы наш робот смог развивать скорость минимум в 80 км/ч. В самое ближайшее время первый прототип робота покинет беговую дорожку и выйдет на испытания на открытое пространство, которые помогут нам выяснить пределы возможностей наших стремительных роботов».
80 километров в час, это на 40 километров в час меньше скорости, которую может развить живой гепард. Но такая скорость приблизительно равняется скорости, которую могут развивать львы и быстроногие газели. Но, в отличие от животных, механический гепард должен обладать надежностью и износостойкостью, значительно превышающей возможности любых животных.
Но такая скорость приблизительно равняется скорости, которую могут развивать львы и быстроногие газели. Но, в отличие от животных, механический гепард должен обладать надежностью и износостойкостью, значительно превышающей возможности любых животных.
Прототип робота, движущийся по беговой дорожке, подключен к внешним устройствам и приборам с помощью кабелей и трубопроводов. По этим кабелям и трубам роботу поступает электрическая энергия и высокое давление, приводящее в действие гидравлические агрегаты. Точно таким же образом проводились первые испытания прототипа другого робота компании Boston Dynamics, робота Alpha Dog. Но представители компании утверждают, что немного позже в этом году появится следующий прототип робота-гепарда, который будет в состоянии передвигаться без каких-либо внешних приборов и устройств.
Перейти к списку новостей
Инженеры создали крошечного робота, способного прыгать и бегать как гепард — Газета.
 Ru
Ru
Инженеры создали крошечного робота, способного прыгать и бегать как гепард — Газета.Ru | Новости
Ученые создали сантиметрового мягкого робота, способного бегать на относительно большой скорости. Об этом сообщает New Scientist.
Он может пробегать 70 длин своего тела каждую секунду — эта скорость более чем в три раза выше скорости бега гепарда, учитывая размеры тел. Для получения кадров бега исследователям даже пришлось купить специальную высокоскоростную камеру.
close
100%
Робот сделан из резиноподобного материала, скрученного в перевернутую U-образную форму с пропущенными через него металлическими проводами. Когда электрические токи в этих проводах взаимодействуют с магнитным полем вокруг робота, он движется. Они надеются, что в конечном итоге изобретение будет использоваться в медицине для доставки лекарств или проведения процедур внутри человеческого тела. «Потребовалось несколько месяцев, чтобы найти хороший дизайн «ноги». Но теперь робот может ходить по любой плоской поверхности, например, по резине, дереву или бумаге», — говорит Гоюн Мао из Университета имени Иоганна Кеплера в Линце. Кроме того, робот может бегать, вращаться по кругу, плавать в воде, перепрыгивать небольшие препятствия и перевозить грузы. Время работы от батареи составляет полчаса, в дальнейшем этот период планируют увеличить.
«Потребовалось несколько месяцев, чтобы найти хороший дизайн «ноги». Но теперь робот может ходить по любой плоской поверхности, например, по резине, дереву или бумаге», — говорит Гоюн Мао из Университета имени Иоганна Кеплера в Линце. Кроме того, робот может бегать, вращаться по кругу, плавать в воде, перепрыгивать небольшие препятствия и перевозить грузы. Время работы от батареи составляет полчаса, в дальнейшем этот период планируют увеличить.
Подписывайтесь на «Газету.Ru» в Новостях, Дзен и Telegram.
Чтобы сообщить об ошибке, выделите текст и нажмите Ctrl+Enter
Новости
Дзен
Telegram
Георгий Бовт
Мир без людей
О том, что будет, когда всем начнет править искусственный разум
Алена Солнцева
«Я даю тебе лям в рублях, а ты мне кино снимаешь»
О новом образе 90-х, Константинопольском, Византийском и о том, чем это кончилось
Дмитрий Воденников
Жестокий Андерсен
О том, какие сказки надо рассказывать под Новый год
Александр Тихомиров
Зарплата №13
О том, как грамотно распорядиться новогодним бонусом
Анастасия Миронова
Семейный выходной в магазине
О том, почему пропал смысл посещать гипермаркеты
Найдена ошибка?
Закрыть
Спасибо за ваше сообщение, мы скоро все поправим.
Продолжить чтение
Этот робот-гепард странным образом научился спринтерскому бегу
Вероятно, к лучшему, что человеческие младенцы не могут бегать со скоростью 9 миль в час вскоре после рождения. Требуются годы практики, чтобы хорошо ползать, а затем хорошо ходить, и в течение этого времени матерям не нужно беспокоиться о том, что их дети выберутся из округа. Однако у робототехников нет такого свободного времени, поэтому они разрабатывают способы, с помощью которых машины учатся двигаться методом проб и ошибок — совсем как младенцы, только намного, намного быстрее.
Однако у робототехников нет такого свободного времени, поэтому они разрабатывают способы, с помощью которых машины учатся двигаться методом проб и ошибок — совсем как младенцы, только намного, намного быстрее.
Видео: Массачусетский технологический институт
Да, хорошо, то, что вы видите на видео выше, не самое изящное передвижение. Но ученые Массачусетского технологического института объявили на прошлой неделе, что они получили эту исследовательскую платформу, четырехногую машину, известную как Mini Cheetah, которая достигла самой высокой скорости за всю историю — почти 13 футов в секунду или 9 миль в час — не путем тщательного ручного кодирования ее движений. строка за строкой, а поощряя цифровые версии машины экспериментировать с запуском в смоделированном мире. То, на чем остановилась система,… нетрадиционно. Но исследователи смогли перенести то, чему научился виртуальный робот, в эту физическую машину, которая затем могла мчаться по любой местности, не падая лицом вниз.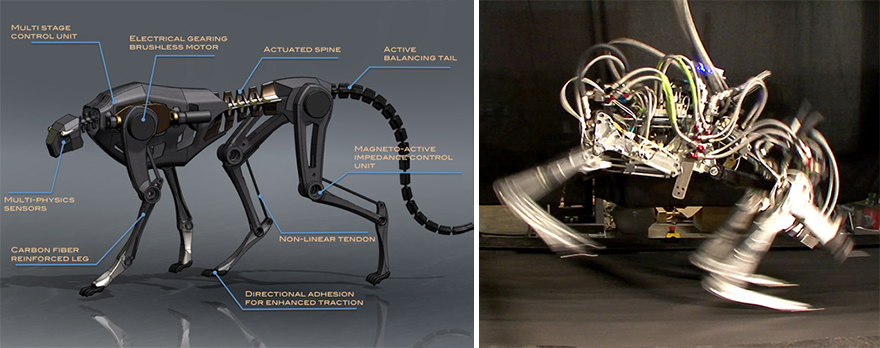
Этот метод известен как обучение с подкреплением. Думайте об этом, как о подвешивании игрушки перед ребенком, чтобы побудить его ползать, только здесь исследователи смоделировали 4000 версий робота и предложили им сначала научиться ходить, а затем бегать в разных направлениях. Цифровые мини-гепарды прошли пробные испытания на уникальных смоделированных поверхностях, которые были запрограммированы на определенные уровни характеристик, таких как трение и мягкость. Это подготовило виртуальных роботов к ряду поверхностей, с которыми им нужно было бы справиться в реальном мире, таких как трава, тротуар, лед и гравий.
Тысячи смоделированных роботов могут попробовать всевозможные способы движения конечностями. Техники, которые приводили к скорости, поощрялись, а плохие выбрасывались. Со временем виртуальные роботы учились методом проб и ошибок, как это делает человек. Но поскольку это происходило в цифровом виде, роботы могли учиться на способов на быстрее: всего три часа практики в симуляции равнялись 100 часам в реальном мире.
Видео: Массачусетский технологический институт
Затем исследователи перенесли то, что цифровые роботы узнали о беге по разным поверхностям, в реальный Mini Cheetah. У робота нет камеры, поэтому он не может видеть свое окружение, чтобы регулировать свою походку. Вместо этого он рассчитывает свой баланс и отслеживает, как его шаги продвигают его вперед. Например, если он ходит по траве, он может вернуться к своей цифровой тренировке на поверхности с таким же трением и мягкостью, как и настоящий газон. «Вместо того, чтобы человек точно предписывал, как робот должен ходить, робот учится на симуляторе и опыте, чтобы, по сути, достичь способности бегать вперед и назад и поворачивать — очень, очень быстро», — говорит Габриэль Марголис, исследователь ИИ в MIT, который участвовал в разработке системы.
Результат не особенно элегантен, но он стабилен и , и робот в значительной степени сделал это самостоятельно. Mini Cheetah может карабкаться вниз по склону, когда гравий перемещается под ногами, и сохранять равновесие на участках льда. Он может оправиться от спотыкания и даже приспособиться к продолжению движения, если одна из его ног отключена.
Он может оправиться от спотыкания и даже приспособиться к продолжению движения, если одна из его ног отключена.
Чтобы было ясно, это не обязательно самый безопасный или самый энергоэффективный способ работы робота — команда оптимизировала только скорость. Но это радикально отличается от того, насколько осторожно другие роботы должны перемещаться по миру. «Большинство этих роботов очень медленные, — говорит Пулкит Агравал, исследователь ИИ из Массачусетского технологического института, который участвовал в разработке системы. «Они не ходят быстро или не умеют бегать. И даже когда они идут, они просто идут прямо. Или они могут поворачиваться, но не могут вести себя подвижно, например, вращаться на высокой скорости».
Как робот Массачусетского технологического института Cheetah получил свою скорость
MIT
Новая версия очень быстрого четвероногого робота из Лаборатории компьютерных наук и искусственного интеллекта Массачусетского технологического института (CSAIL).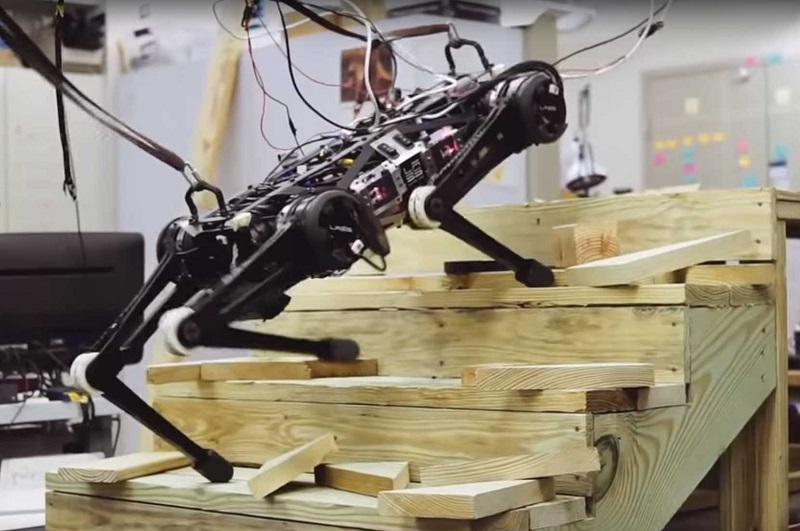 В то время как четвероногие роботы привлекали к себе огромное внимание за последние пару лет, один удивительно банальный навык был для них неуловимым: бег.
В то время как четвероногие роботы привлекали к себе огромное внимание за последние пару лет, один удивительно банальный навык был для них неуловимым: бег.
Это потому, что бег в реальной среде феноменально сложен. Быстрый темп оставляет роботам мало места для столкновения, восстановления и адаптации к проблемам (например, скользким поверхностям, физическим препятствиям или неровной местности). Более того, нагрузки при работе доводят оборудование до предела по крутящему моменту и нагрузке. Аспирант MIT CSAIL Габриэль Марголис и постдокторант Института ИИ и фундаментальных взаимодействий (IAIFI) Ге Ян недавно рассказали MIT News:
В таких условиях динамику робота сложно смоделировать аналитически. Робот должен быстро реагировать на изменения в окружающей среде, например, когда он сталкивается со льдом во время бега по траве. Если робот идет, он движется медленно, и наличие снега обычно не является проблемой. Представьте, если бы вы шли медленно, но осторожно: вы можете пересечь почти любую местность.
Сегодняшние роботы сталкиваются с аналогичной проблемой. Проблема в том, что передвигаться по любой местности, как если бы вы шли по льду, очень неэффективно, но это распространено среди современных роботов. Люди быстро бегают по траве и замедляются по льду — мы приспосабливаемся. Предоставление роботам аналогичной способности к адаптации требует быстрой идентификации изменений местности и быстрой адаптации для предотвращения падения робота. Таким образом, поскольку нецелесообразно заранее строить аналитические (разработанные человеком) модели всех возможных ландшафтов, а динамика робота становится более сложной при высоких скоростях, бег на высокой скорости более сложен, чем ходьба.
 Сегодняшние роботы сталкиваются с аналогичной проблемой. Проблема в том, что передвигаться по любой местности, как если бы вы шли по льду, очень неэффективно, но это распространено среди современных роботов. Люди быстро бегают по траве и замедляются по льду — мы приспосабливаемся. Предоставление роботам аналогичной способности к адаптации требует быстрой идентификации изменений местности и быстрой адаптации для предотвращения падения робота. Таким образом, поскольку нецелесообразно заранее строить аналитические (разработанные человеком) модели всех возможных ландшафтов, а динамика робота становится более сложной при высоких скоростях, бег на высокой скорости более сложен, чем ходьба.
Сегодняшние роботы сталкиваются с аналогичной проблемой. Проблема в том, что передвигаться по любой местности, как если бы вы шли по льду, очень неэффективно, но это распространено среди современных роботов. Люди быстро бегают по траве и замедляются по льду — мы приспосабливаемся. Предоставление роботам аналогичной способности к адаптации требует быстрой идентификации изменений местности и быстрой адаптации для предотвращения падения робота. Таким образом, поскольку нецелесообразно заранее строить аналитические (разработанные человеком) модели всех возможных ландшафтов, а динамика робота становится более сложной при высоких скоростях, бег на высокой скорости более сложен, чем ходьба. Что отличает новейший MIT Mini Cheetah, так это то, как он справляется. Ранее в MIT Cheetah 3 и Mini Cheetah использовались гибкие беговые контроллеры, которые были разработаны инженерами-людьми, которые проанализировали физику передвижения, сформулировали несовершенные абстракции и реализовали специализированную иерархию контроллеров, чтобы заставить робота балансировать и бегать. Точно так же работает робот Spot от Boston Dynamics.
Точно так же работает робот Spot от Boston Dynamics.
Эта новая система основана на модели опыта для обучения в режиме реального времени. На самом деле, обучая свою простую нейронную сеть на симуляторе, робот MIT может получить 100-дневный опыт работы на различных территориях всего за три часа.
«Мы разработали подход, с помощью которого поведение робота улучшается на основе смоделированного опыта, и наш подход также позволяет успешно применять эти изученные модели поведения в реальном мире», — объясняют Марголис и Янг.
«Интуиция, объясняющая, почему навыки бега робота хорошо работают в реальном мире, заключается в следующем: из всех сред, которые он видит в этом симуляторе, некоторые из них обучают робота навыкам, которые полезны в реальном мире. При работе в реальном мире, наш контроллер определяет и выполняет соответствующие навыки в режиме реального времени», — добавили они.