Содержание
Гусеничный автономный робот. Платформа для Ваших роботов / Хабр
DIY разработка. Ошибки и грабли. Возможные сферы применения
Я покажу свой опыт как сделать автономный гусеничный робот, не раздувая щеки и бюджет. Задача оказалась достаточно интересной, а в процессе реализации я собрал все грабли, которые cмог.
Гусеничное шасси
Мне помог с корпусом и шасси Алексей Беляков, с которым вместе мы сотрудничаем давно и писали статью о промышленном дизайне.
Примерная схема компоновки с которой начали работу и подбор комплектующих. Так как раздувать бюджет не хотелось нужно было выбирать из комплектующих доступных в продаже. Приступили к выбору гусениц.
Корпус
Как сказал бы мой внутренний гуманитарий «Общий вид должен быть агрессивный, напористый, технологичный, транслирующий уверенность и стремление к решению задачи, демонстрирующий инновационную начинку робота«. Кроме эстетической стороны, должна быть возможность быстрого прототипирования и перехода к вакуумной формовке при производстве в дальнейшем. Эскизных вариантов было большое количество, глаза разбегались и хотелось сделать все.
Эскизных вариантов было большое количество, глаза разбегались и хотелось сделать все.
Другие варианты дизайна
В итоге была выбрана концепция, по которой проектировали корпус.
Моторы и контроллеры
Изначально планировал использовать BLDC моторы. Есть большой опыт в настройке контроллеров Kelly, писал об этом статью. Так как хотелось иметь запас по мощности я решил использовать по мотору 1кВт на каждую ось. Напряжение я решил выбрать 48В, так как для этого напряжения есть огромное количество доступных контроллеров, BMS. Моторы с Али MY1020
Так как в приоритете высокий момент решил использовать редуктор с большой степенью редукции 1:10 и более. Первые опыты с двухступенчатым цепным редуктором не увенчались успехом.
Хотелось мотор в закрытом корпусе от грязи, воды и пили, я выбрал мотор-редукторы с червячным приводом, забегая вперед скажу, что это не самое лучшее решение в плане КПД, но это рабочий вариант. Очень долго искал бюджетный, в итоге выбрал NRV в фирме Подольск Привод. Для того, чтобы соединить мотор и редуктор необходимо было выточить вал и муфту.
Для того, чтобы соединить мотор и редуктор необходимо было выточить вал и муфту.
ВалМуфта
Батарея
Батарею решено было сделать из призматиков LiFePo4 по 50А*ч. Самый экономичный и неприхотливый вариант с огромным количеством недорогих BMS и возможностью работать при температуре ниже 0.
Плата управления
Спроектировал плату управления в EasyEDA, там же и заказал.
На плате управления:
микроконтроллер Atmega, чтобы от православной ардуины далеко не отходить;
Гребенка для связи с Jetson nano на будущее;
Управление моторами и считывание показаний энкодеров через опторазвязки;
Реле для управления навесным оборудованием.
Разъемы для подключения приемника радиоуправления
Разъем для соеднинения BeagleBone компьютера.
И естественно, с первого раза все на перемычках, где-то дорожка не туда пошла, где-то что-то забыл. Это как синяя изолента при прототипировании на удачу.
Ardupilot и Mission planer
Управление платформой с пульта дистанционного управления хоть и весело, позволяет закрыть Гештальт и залечить детские травмы, но не так технологично как автономный робот.
Для решения задач патрулирования или проезда по маршруту можно использовать ROS, но самым простым вариантом является использование Ardupilot, я писал статью о настройке.
С BeagleBone мы получаем два RC-канала, для левой и правой гусеницы, вся остальная магия происходит внутри Ardupilot, там же и настройки. BB создает точку WiFi, цепляясь к ней мы можем управлять роботом еще и с джойстика и получать телеметрию.
Использование радио-модулей, например Holybro позволяют получать данные и управлять роботом на расстоянии около 1000метров. Для большего радиуса можно использовать ZigBee Pro.
Во вкладке Flight plan создаем маршрут, загружаем по WiFi в робота и отправляем его по маршруту.
Робот едет на испытания
Ко мне обращались из нескольких организаций с потребностью в автономном роботе или операторозависимой гусеничной платформе. Речь шла о роботе для передвижения легкомоторных самолётов и вертолетов из ангара, автономный робот для обработки полей от борщевика, рое роботов для передвижения мишеней на полигоне.
Речь шла о роботе для передвижения легкомоторных самолётов и вертолетов из ангара, автономный робот для обработки полей от борщевика, рое роботов для передвижения мишеней на полигоне.
Гусеничная платформа не цель, а скорее средство. Это лишь способ доставить навесное оборудование решающее определенные задачи. Наличие платформы с высокой проходимостью и возможностью удаленного управления позволяет сфокусироваться. Готов к сотрудничеству и решению интересных задач. Если Вам интересно делать роботов, Вы готовы учиться новому — напишите мне.
Робот, который движется как гусеница, может пройти там, где не могут другие роботы
Научные разработки, программное обеспечение
Своеобразный способ, которым передвигается этот, напоминающий гусеницу, робот может быть не столь быстрый, по сравнению с использованием ног, крыльев или колес, но он дает преимущество, когда дело доходит до маневрирования в ограниченном пространстве. Это одна из причин, почему исследователи разработали и создали мягкого червеобразного робота, который перемещается подобно гусенице, подтягивая и поднимая тело вверх, а затем продвигая его вперед. Такие роботы в последующем могут использоваться в спасательных и разведывательных работах в недоступных для человека или больших роботов местах.
Такие роботы в последующем могут использоваться в спасательных и разведывательных работах в недоступных для человека или больших роботов местах.
Исследователи из Сеульского национального университета опубликовали в недавнем выпуске журнала Bioinspiration & Biomimetics свою статью о роботе в стиле гусеницы бабочки пяденицы.
В природе гусеница бабочки пяденицы, известная также как землемер, имеет длину от двух до пяти сантиметров. Небольшой зеленый червяк имеет две или три ноги в передней части, на заднем конце также две или три ноги, но они недостаточно развитые и называются ложными. Хотя, как и все гусеницы, они не имеют костей, но сложные системы мышц позволяют им выполнять разнообразные движения тела, в том числе стоя вертикально на задних ложных ножках.
Чтобы имитировать перемещение в стиле этой гусеницы, исследователи использовали мягкие, гибкие силиконовые материалы (Polydimethylsiloxane – PDMS). Исследователи создали форму гусеницы, используя 3D принтер, а затем залили в форму PDMS. Затем они приклеили небольшие кусочки полиамидной пленки, чтобы сделать ноги на передней и задней конечности. Для имитации мышечных волокон исследователи использовали восемь продольных жгутов из сплава с памятью формы (SMA), которые проходят по всей длине тела робота.
Затем они приклеили небольшие кусочки полиамидной пленки, чтобы сделать ноги на передней и задней конечности. Для имитации мышечных волокон исследователи использовали восемь продольных жгутов из сплава с памятью формы (SMA), которые проходят по всей длине тела робота.
Подавая на волокна с SMA электрический ток, исследователи могли заставить тело робота двигаться подобно гусенице. Использование для подачи тока симметричных волокон приводит к линейному перемещению. Активация асимметричных волокон приводит к деформации и повороту с использованием одной ноги в качестве якоря.
Испытания показали, что длина шага робота достигает 54 мм, что составляет около одной трети от длины тела, он передвигается со скоростью около 3,6 мм / с. Поворот выполняется медленнее и сложнее, требуется 21 шаг, чтобы завершить полный поворот на 90 градусов. Тем не менее, это уже успех, по сравнению с предыдущими подобными роботами.
Кроме того, этот гусеничный робот простой, легкий и бесшумный. Эти особенности делают его полезным не только для спасательных и разведывательных миссий, но и как потенциальный материал для умных структур и носимых устройств. В будущем исследователи планируют сосредоточиться на совершенствовании мобильности робота с помощью независимой системы управления.
Эти особенности делают его полезным не только для спасательных и разведывательных миссий, но и как потенциальный материал для умных структур и носимых устройств. В будущем исследователи планируют сосредоточиться на совершенствовании мобильности робота с помощью независимой системы управления.
«Мы хотим применить этот алгоритм движения и управления к другим роботам на основе двигателей, чтобы сделать тихие и гибкие устройства, но с большой грузоподъемностью», — сказал соавтор разработки Сун Хун Ан, профессор Сеульского национального университета. «Мы также хотим использовать нашу интеллектуальную технологию мягких композитных материалов в таких типах механизмов, как мягкие протезы, мягкие электронные приборы, автомобили-трансформеры и т.д.»
Теги: робот-гусеница, Polydimethylsiloxane, SMA
Гусеничный | RoboTech Vision
Внедорожная роботизированная платформа
Роботизированная платформа Crawler разработана в первую очередь для бездорожья. Прочность, проходимость и низкий центр тяжести — основа движения робота по пересеченной местности и по грунтовым поверхностям. Таким образом, устройство также подходит для сельскохозяйственных или исследовательских целей. На гусеничный ход можно загрузить 80-килограммовый груз.
Таким образом, устройство также подходит для сельскохозяйственных или исследовательских целей. На гусеничный ход можно загрузить 80-килограммовый груз.
Основой робота является дифференциальное гусеничное шасси. Чрезвычайно тихая и плавная работа обеспечивается двигателями BLDC с червячными редукторами, которые не требуют технического обслуживания. Прочные гусеницы обеспечивают сцепление на любой поверхности. Робот соответствует спецификации IP65, поэтому может работать в любую погоду. При необходимости его можно дополнить роботизированной рукой Spinbotics, RTV Sensor Box для автономного движения или другим оборудованием.
ЦЕНА ПРЕДЛОЖЕНИЕ
УЗНАТЬ БОЛЬШЕ
ОСОБЕННОСТИ И ТЕХНОЛОГИИ
Краулер не беспокоит окружающих. Его обеспечивают приводы BLDC с червячными редукторами, приводящие в движение резиновые гусеницы.
Бесщеточные приводы и червячные редукторы с заполнением маслом на весь срок службы гарантируют высокий крутящий момент и работу без технического обслуживания.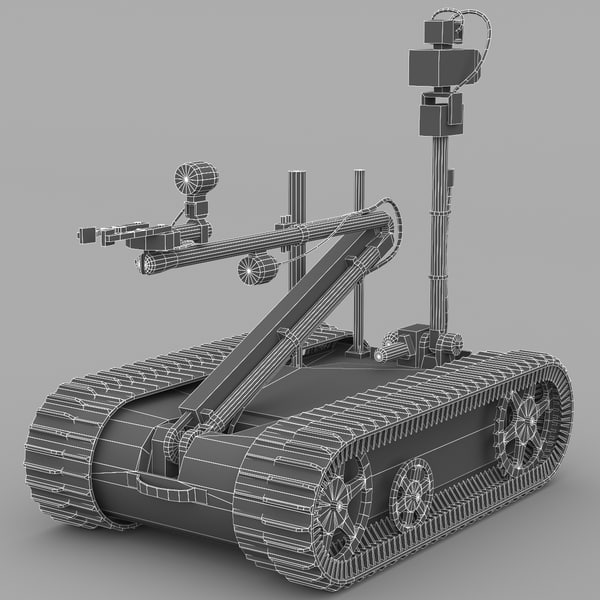
Точное управление положением робота предопределяет его для операций, требующих высокой точности перемещения устройства в окружающей среде.
Робот использует элементы ИИ, с помощью которых он распознает объекты и может, например, автономно подходить к док-станции для подзарядки.
Грузоподъемность и высокий крутящий момент предопределяют робота для переноски тяжелых грузов и буксировки различных орудий, например для обработки почвы.
Возможность использования робота в разных средах и для разных типов задач делает его адаптируемой роботизированной платформой.
ПРИМЕРЫ ПРИМЕНЕНИЯ
Гусеничная тележка для ухода за виноградниками
Одним из практических применений мобильного робота Crawler является его применение в сфере сельского хозяйства. Примером может служить использование платформы в виноградарской среде, где она нашла свое применение в качестве автономного устройства, скашивающего пространство между рядами виноградной лозы. В дополнение к своему движению Crawler также может использовать датчики для сбора данных, предназначенных для прогнозирования заболеваний. Затем робот может пометить поврежденные корни с помощью роботизированной руки.
В дополнение к своему движению Crawler также может использовать датчики для сбора данных, предназначенных для прогнозирования заболеваний. Затем робот может пометить поврежденные корни с помощью роботизированной руки.
УЗНАТЬ БОЛЬШЕ
СОТРУДНИЧЕСТВО
ДОСТУПНЫЕ ВЕРСИИ
Базовая платформа, подходящая для университетов и исследовательских институтов для разработки алгоритмов. Платформа может быть дополнена датчиком, программным обеспечением или выходами для других устройств по мере необходимости.
Платформа, подходящая в качестве сервисного робота для сложной местности, управляемая телеоператором с помощью приложения RTV Teleop. Возможность оснастить робота сенсорной системой, манипулятором Spinbotics или другим оборудованием по мере необходимости.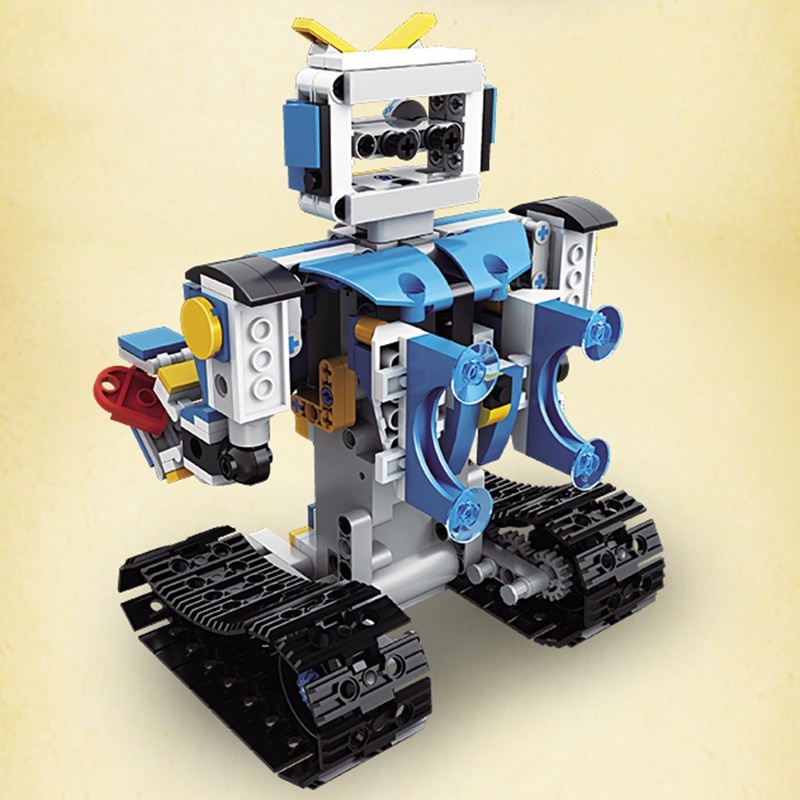
Автономная платформа, предназначенная для использования вне помещений. Робот оснащен блоком датчиков RTV и алгоритмом AVN. Устройство автономно перемещается в рядах виноградников или в саду и решает такие операции, как скашивание, локальное опрыскивание или сбор образцов, необходимых для прогнозирования заболеваний.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Размеры
Ширина: 600 мм
Высота: 370 мм
Длина: 1000 мм
Высота направляющей: 2505 мм
Вес: 70 кг
Борьба с питанием
Свод питания: 24 В/35AH AGM
Зарядка: 230 В адаптер
Время зарядки: 4 H
Особенности
Время работы: 2 H
. См. Максимальная скорость: 4 км/ч
Приводы и управление
Приводы: 2x BLDC HUB 500W 24V
Коробка передач: червячная
Управление приводом: позиционное
Вычислительный блок
В зависимости от типа и применения ПК (стандартный Advantech)
Входы и выходы
Данные:
- 2xRJ45/1Gbit
- 2x USB
Напряжение:
- 12 В/10 А
- 5 В, 12 В и 24 В (в зависимости от требований)
Возможности подключения:
- Wi-Fi 2,4 ГГц и 5 ГГц
API
API и поддержка: ROS Melodic, C/C++, Python, Java
Среда моделирования: Webots, Gazebo
Режимы управления: удаленное управление, команды ROS cmd_vel
Обратная связь: напряжение аккумулятора, ток двигателя, одометр колеса, состояние системы управления, температура, состояние безопасности от -10°C до +45°C
ДОПОЛНИТЕЛЬНОЕ ОБОРУДОВАНИЕ
Комбинированный датчик для автономного движения.
Приложение управления роботом, отображающее телеметрию устройства.
Надстройка для автономной навигации робота на открытом воздухе.
Устройство для ориентации робота во время навигации.
Модульное решение внешней и внутренней структуры WiFi.
Компания занимается разработкой автономных роботов с элементами ИИ. Она стремится разрабатывать универсальные решения для различных задач, отраслей и сред.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ
Алгоритм AON
Алгоритм AVN
Алгоритм ADN
Алгоритм ORC
ПРОДУКЦИЯ
Caster
Crawler
RTV Sensor Box
Контакт
Robotech Vision Ltd.
červený Kame 61
900 89 častá
Slovakia
Контакт с США
častá
Slovakia
. Центр поиска Google | Документация
«Краулер» (иногда также называемый «роботом» или «пауком») — это общий термин для любой программы, которая
используется для автоматического обнаружения и сканирования веб-сайтов путем перехода по ссылкам с одной веб-страницы на
Другая. Главный поисковый робот Google называется
Главный поисковый робот Google называется
Googlebot. В этой таблице указана информация
о распространенных поисковых роботах Google, которые вы можете увидеть в журналах рефереров, и о том, как указать их в
robots.txt,
метатеги robots и
X-Robots-Tag Директивы HTTP.
В следующей таблице показаны поисковые роботы, используемые различными продуктами и службами Google:
- Токен пользовательского агента используется в строке
User-agent:файла robots.txt.
чтобы соответствовать типу сканера при написании правил сканирования для вашего сайта. Некоторые сканеры имеют более
один токен, как показано в таблице; вам нужно сопоставить только один токен сканера, чтобы правило
применять. Этот список не является полным, но охватывает большинство поисковых роботов, которые вы можете увидеть на своем компьютере.
Веб-сайт. - Полная строка пользовательского агента представляет собой полное описание сканера и появляется в
HTTP-запрос и ваши веб-журналы.
Внимание! . Строка пользовательского агента может быть подделана.
Узнайте, как проверить, является ли посетитель поисковым роботом Google.

Краулеры | |||||
|---|---|---|---|---|---|
API-интерфейсы Google |
| ||||
AdsBot Mobile Web Android | AdsBot Mobile Web Android игнорирует подстановочный знак * . Проверяет качество рекламы на веб-странице Android.
| ||||
AdsBot Мобильный Интернет | AdsBot Mobile Web игнорирует подстановочный знак * .Проверяет качество рекламы на веб-странице iPhone.
| ||||
AdsBot | AdsBot игнорирует подстановочный знак * .Проверяет качество рекламы на настольной веб-странице.
| ||||
Адсенс |
| ||||
Изображение Googlebot |
| ||||
Новости Googlebot |
| ||||
Робот Googlebot Видео |
| ||||
Googlebot Рабочий стол |
| ||||
Смартфон Googlebot |
| ||||
Мобильный AdSense |
| ||||
Мобильные приложения Android | Мобильные приложения Android игнорирует подстановочный знак * . Проверяет рекламу на странице Android-приложения
| ||||
Feedfetcher | Осторожно : Feedfetcher не соблюдает правила robots. 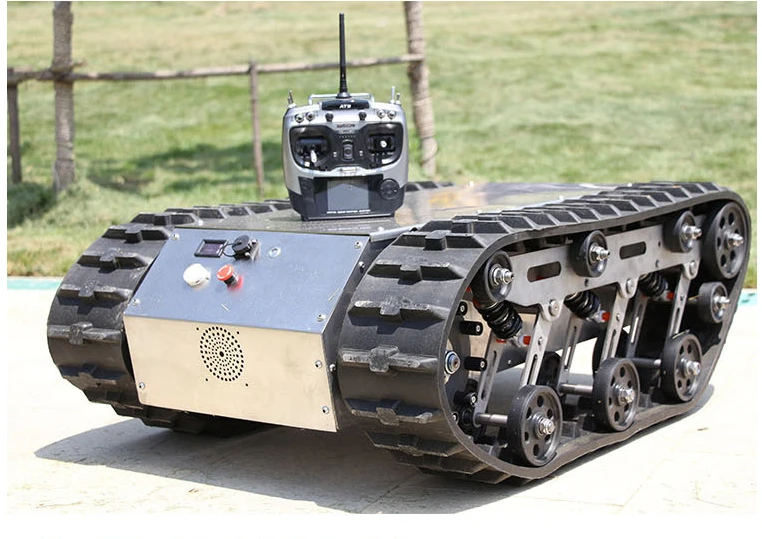 txt. txt.
| ||||
Гугл читать вслух | Предупреждение : Google Функция «Чтение вслух» не соблюдает правила robots.txt.
| ||||
Фавикон Google | Предупреждение .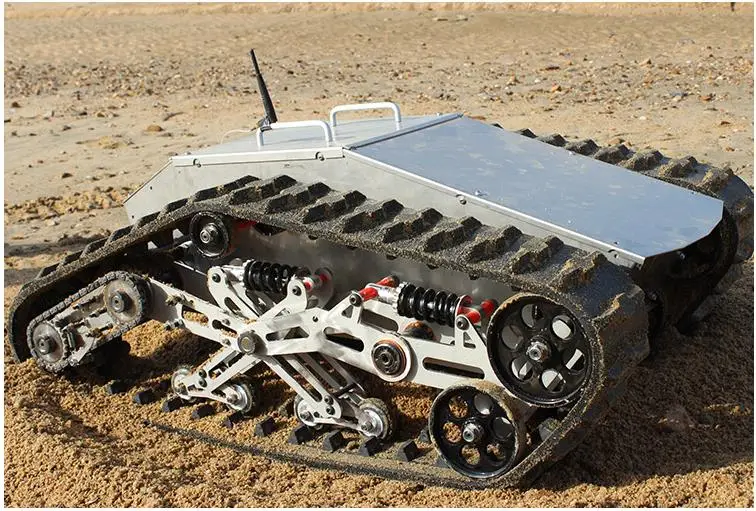 Для запросов, инициированных пользователями, значок Google Favicon игнорирует Для запросов, инициированных пользователями, значок Google Favicon игнорируетправила robots.txt.
| ||||
Google StoreBot |
| ||||
Верификатор сайта Google | Внимание! . Google Site Verifier игнорирует правила robots.txt.
| ||||
 0 (iPhone; процессор iPhone OS 14_7_1, например, Mac OS X) AppleWebKit/605.1.15 (KHTML, например, Gecko) Version/14.1.2 Mobile/15E148 Safari/604.1 (совместимый; AdsBot-Google-Mobile; +http ://www.google.com/mobile/adsbot.html)
0 (iPhone; процессор iPhone OS 14_7_1, например, Mac OS X) AppleWebKit/605.1.15 (KHTML, например, Gecko) Version/14.1.2 Mobile/15E148 Safari/604.1 (совместимый; AdsBot-Google-Mobile; +http ://www.google.com/mobile/adsbot.html)  0
0  0
0 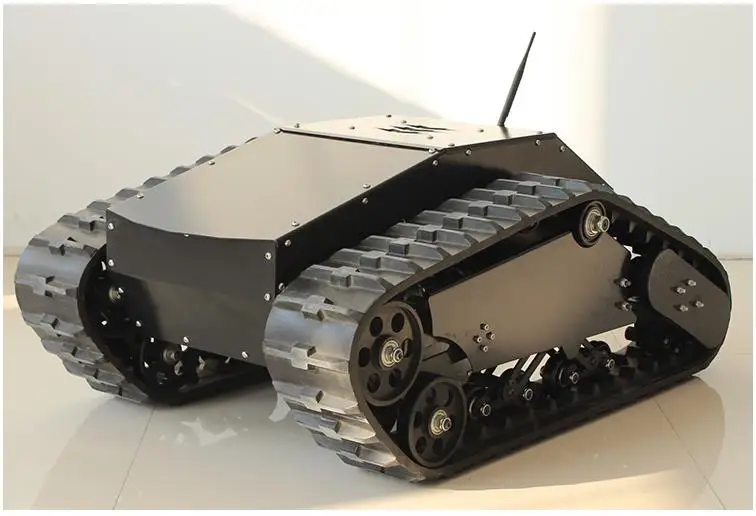 1 (+http://www.google.com/bot.html)
1 (+http://www.google.com/bot.html)  1; +http://www.google.com/bot.html)
1; +http://www.google.com/bot.html) 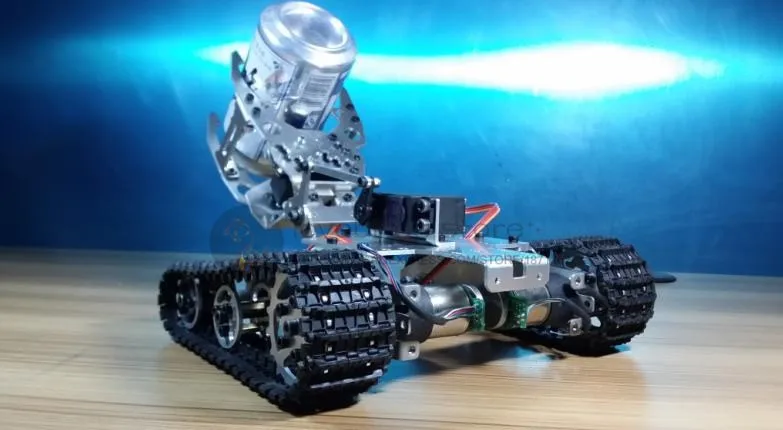 0 (X11; Linux x86_64) AppleWebKit/537.36 (KHTML, например Gecko) Chrome/41.0.2272.118 Safari/537.36 (совместимый; Google-Read-Aloud; +https://developers.google.com) /search/docs/crawling-indexing/overview-google-crawlers)
0 (X11; Linux x86_64) AppleWebKit/537.36 (KHTML, например Gecko) Chrome/41.0.2272.118 Safari/537.36 (совместимый; Google-Read-Aloud; +https://developers.google.com) /search/docs/crawling-indexing/overview-google-crawlers) 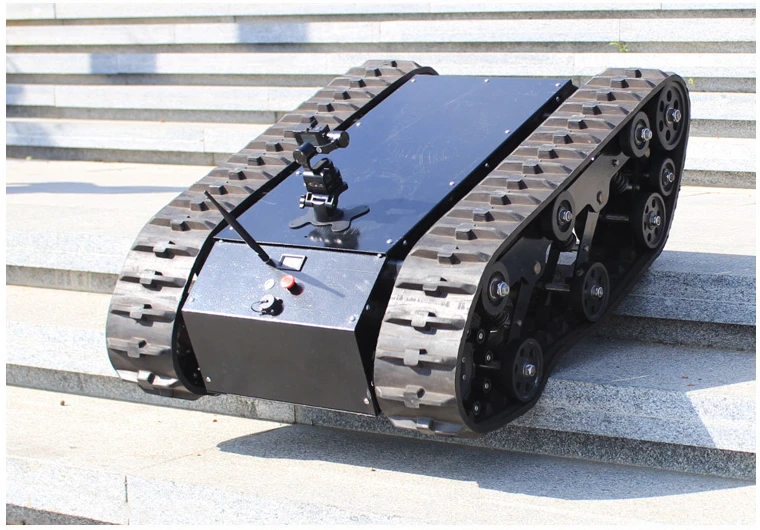 0 (X11; Linux x86_64; Storebot-Google/1.0) AppleWebKit/537.36 (KHTML, например Gecko) Chrome/79.0.3945.88 Safari/537.36
0 (X11; Linux x86_64; Storebot-Google/1.0) AppleWebKit/537.36 (KHTML, например Gecko) Chrome/79.0.3945.88 Safari/537.36 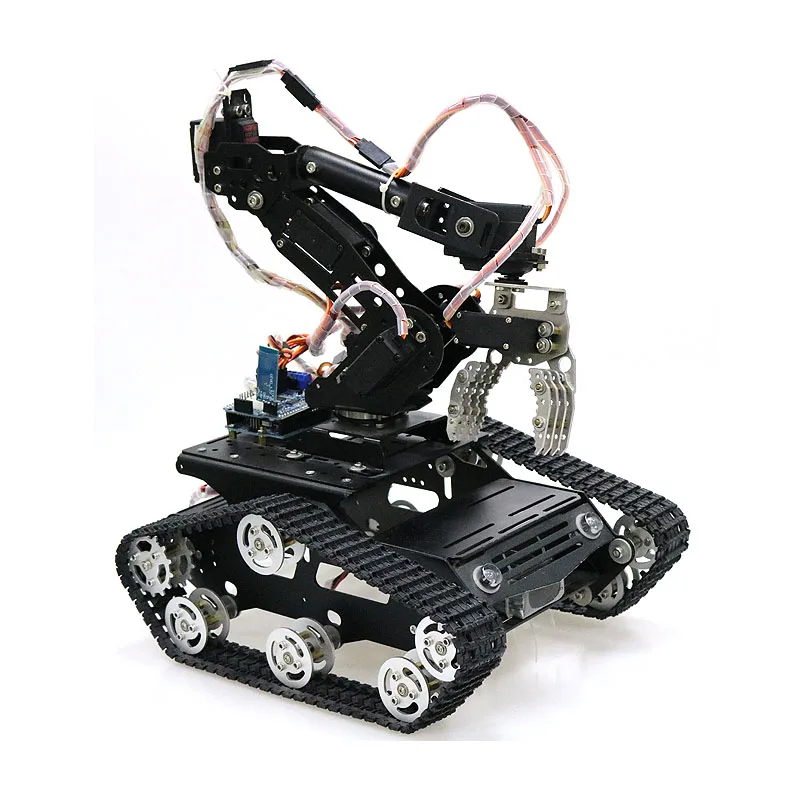 0 (совместимо; Google-Site-Verification/1.0)
0 (совместимо; Google-Site-Verification/1.0) Примечание о Chrome/
W.X.Y.Z в пользовательских агентах
Везде, где вы видите строку Chrome/ W.X.Y.Z в пользовательском агенте
строк в таблице, W.X.Y.Z на самом деле является заполнителем, представляющим версию
браузера Chrome, используемого этим пользовательским агентом: например, 41.0.2272.96 . Эта версия
число будет увеличиваться со временем до
соответствовать последней версии Chromium, используемой роботом Googlebot.
Если вы просматриваете свои журналы или фильтруете свой сервер для пользовательского агента с этим шаблоном,
использовать подстановочные знаки для номера версии, а не указывать точное
номер версии.
Пользовательские агенты в robots.txt
Если в файле robots.txt распознано несколько пользовательских агентов, Google будет следовать наиболее
конкретный. Если вы хотите, чтобы весь Google мог сканировать ваши страницы, вам не нужен
файл robots.txt вообще. Если вы хотите заблокировать или разрешить всем поисковым роботам Google доступ
часть вашего контента, вы можете сделать это, указав Googlebot в качестве пользовательского агента. Например,
если вы хотите, чтобы все ваши страницы отображались в поиске Google, и если вы хотите, чтобы реклама AdSense появлялась
на ваших страницах вам не нужен файл robots.txt. Точно так же, если вы хотите заблокировать некоторые страницы
от Google вообще, блокируя Пользовательский агент Googlebot также заблокирует все
Другие пользовательские агенты Google.
Но если вам нужен более детальный контроль, вы можете сделать его более конкретным.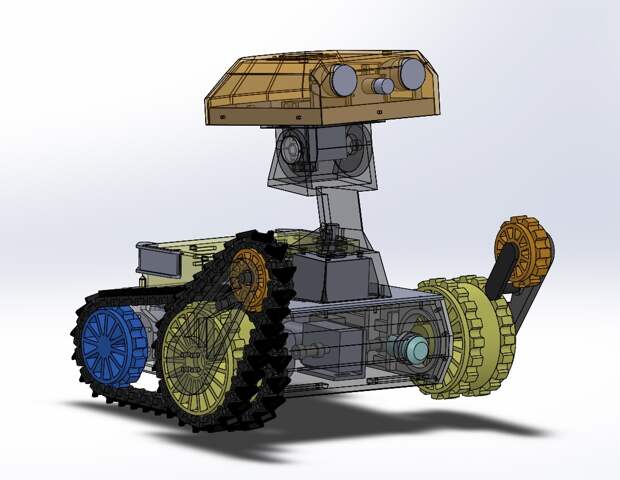 Например, вы можете
Например, вы можете
хотите, чтобы все ваши страницы отображались в поиске Google, но вы не хотите, чтобы изображения отображались в личном
каталог для обхода. В этом случае используйте robots.txt, чтобы запретить
Пользовательский агент Googlebot-Image при сканировании файлов в вашем личном каталоге
(при этом позволяя роботу Googlebot сканировать все файлы), например:
Агент пользователя: Googlebot Запретить: Агент пользователя: Googlebot-Image Запретить: /personal
Возьмем другой пример. Допустим, вы хотите размещать рекламу на всех своих страницах, но не хотите,
страницы для отображения в поиске Google. Здесь вы заблокируете робота Googlebot, но разрешите
Пользовательский агент Mediapartners-Google , например:
Агент пользователя: Googlebot Запретить: / Агент пользователя: Mediapartners-Google Disallow:
Пользовательские агенты в метатегах robots
На некоторых страницах используется несколько метатегов robots для указания директив для разных поисковых роботов, например
это:
В этом случае Google будет использовать сумму отрицательных директив, а робот Google будет следовать
обе директивы noindex и nofollow .
Более подробная информация об управлении тем, как Google сканирует и индексирует ваш сайт.
Контроль скорости сканирования
Каждый поисковый робот Google обращается к сайтам с определенной целью и с разной скоростью. Google использует
алгоритмы для определения оптимальной скорости сканирования для каждого сайта. Если поисковый робот Google сканирует
ваш сайт слишком часто, вы можете
уменьшить скорость сканирования.
Устаревшие поисковые роботы Google
Следующие поисковые роботы Google больше не используются и упоминаются здесь только для исторической справки.
| Устаревшие поисковые роботы Google | |||||
|---|---|---|---|---|---|
Дуплекс в Интернете | Поддерживается Duplex на веб-сервисе.
Предостережение : Дуплекс в Интернете может игнорировать подстановочный знак | ||||
Веб-светильник | Проверяется наличие заголовка | ||||

