Игрушка Fisher Price Обучающий робот Бибо
Наши преимущества
Доставка в день заказа
Доставка работает 7 дней в неделю по Крыму с 10:00-20:00
Широкий ассортимент
Мы предлагаем наиболее полный ассортимент товаров для будущих мам, новорожденных и детей до 5 лет.
Гарантия качества
Все товары, представленные в магазинах moy Lvenok, имеют гарантию производителя.
Акции и скидки
Узнавайте первыми об акциях, скидках и специальных предложениях магазина moy Lvenok.
Удобный самовывоз
Вы можете самостоятельно забрать заказ в одном из магазинов Симферополя.
Собственный склад
Все товары размещаются на складе moy Lvenok, оборудованном для хранения детских товаров.
Способы оплаты
Оплатить покупку можно любым способом: наличными курьеру, банковской картой курьеру, картой по реквизитам.
- 5700 р
Нет в наличии
5130 р
Цена по карте VIP дисконт в розничных магазинах
Интерактивный обучающий робот Fisher Price Бибо понравится малышу, так как он станет для ребенка настоящим другом. Игрушка учит распознавать цвета, считать и танцевать. Нажимая кнопки на животе и ножках, можно активировать разные интересные режимы. Привлекательный дизайн и яркая расцветка этого интерактивного робота обязательно понравятся малышу. Игрушка Бибо позволит ребенку интересно и полезно провести время, развивать в игре различные полезные качества.
- Три режима увлекательной игры.
- Возможность записывать текст, на который Бибо придумывает песню.

- Безопасные материалы и конструкция, экологичность и соответствие высоким стандартам.

Для работы необходимо четыре батарейки типа «AA» (нет в комплекте).
Отзывы
Игрушка Fisher Price Обучающий робот Бибо
Предыдущий
Следующий
Наши преимущества
Доставка в день заказа
Доставка работает 7 дней в неделю по Крыму с 10:00-20:00
Широкий ассортимент
Мы предлагаем наиболее полный ассортимент товаров для будущих мам, новорожденных и детей до 5 лет.
Гарантия качества
Все товары, представленные в магазинах moy Lvenok, имеют гарантию производителя.
Акции и скидки
Узнавайте первыми об акциях, скидках и специальных предложениях магазина moy Lvenok.
Удобный самовывоз
Вы можете самостоятельно забрать заказ в одном из магазинов Симферополя.
Собственный склад
Все товары размещаются на складе moy Lvenok, оборудованном для хранения детских товаров.
Способы оплаты
Оплатить покупку можно любым способом: наличными курьеру, банковской картой курьеру, картой по реквизитам.
Товары этого бренда
С этим товаром покупают
Не забудьте также купить
Robot ZLine (Обучающий умный робот, движущийся по нарисованной траектории)
Бонусы за покупки
Весь товар сертифицирован
Возврат и обмен товара
Удобная и быстрая доставка
- Описание
- Характеристики
- Отзывы
- Видео и полезные файлы
- Особенности
Игрушечный электрический робот двигающийся по любой линии начерченой на белом фоне
- Питание от батарея AG13 4шт. , идет в комплекте
- Матерал АБС пластик (экологичный, влагостойкий, долговечный, нетоксичный)
- Вес 320 гр
- Размер 220х165х90 мм
- Цвет белый/желтый
- Современная и забавная игрушка для детей от 3-х лет.
- Для игры нужно начертить траекторию движения черным цветом на белой бумаге, включить робота и поставить в начало линии, робот автоматически поедет по нарисованной траектории, когда линия закончится игрушка продолжит движение дальше по прямой в последнем направлении.
- Питание от батарея AG13 4шт.
 org/PropertyValue»>
org/PropertyValue»>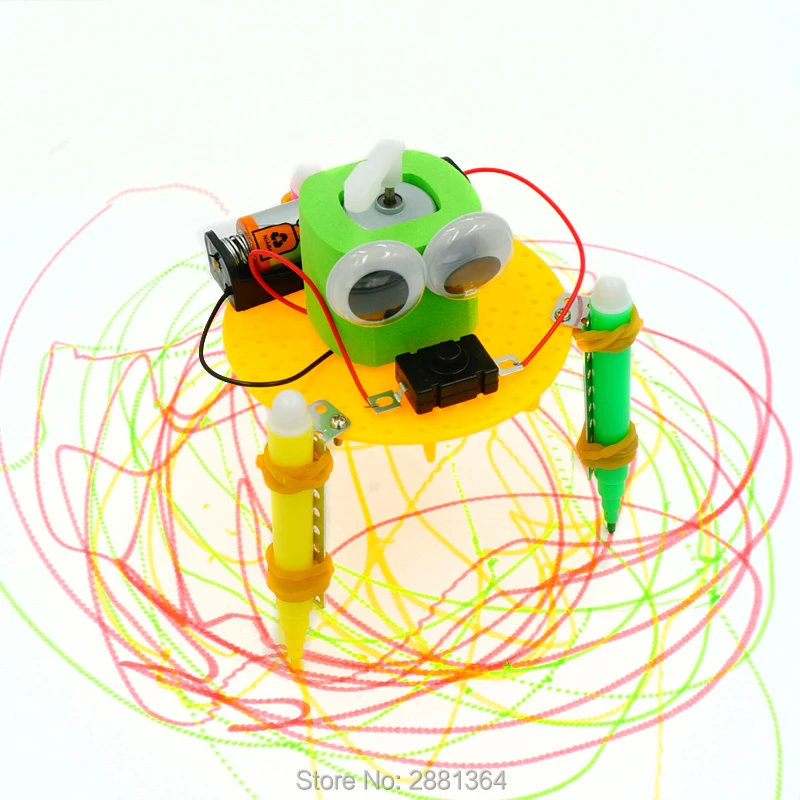 org/PropertyValue»>
org/PropertyValue»>Характеристики Назначение Детская игрушка Функции Отслеживание и движение по заданному направлению Питание Батарея AG13 4шт., идет в комплекте Материал АБС пластик Размер 220х165х90 мм Вес 320 гр - Для данного товара файлы ещё не загружены
 , идет в комплекте
, идет в комплектеБонусы за покупки
Весь товар сертифицирован
Возврат и обмен товара
Удобная и быстрая доставка
Оставить отзыв
Как использовать роботов для помощи учителям и улучшения обучения учащихся?
Автор Tiffany Harper
За последние несколько лет технологии значительно развились. Хотя этот прогресс мог замедлить начавшаяся в прошлом году глобальная пандемия, разработчики не упускают возможности сделать это сейчас. Поскольку пандемия коронавируса сделала многих людей более осведомленными о влиянии их поведения и привычек на мир, окружающую среду и людей, область технологий в наши дни развивается еще больше. Технология — это общий термин, используемый для обозначения вещей, связанных с компьютерами, роботами, искусственным интеллектом, машинным обучением, сетями, серверами и многим другим. Технологии представлены не только вашим смартфоном или ноутбуком. Технологии присутствуют в нашей повседневной жизни больше, чем мы даже осознаем.
Хотя этот прогресс мог замедлить начавшаяся в прошлом году глобальная пандемия, разработчики не упускают возможности сделать это сейчас. Поскольку пандемия коронавируса сделала многих людей более осведомленными о влиянии их поведения и привычек на мир, окружающую среду и людей, область технологий в наши дни развивается еще больше. Технология — это общий термин, используемый для обозначения вещей, связанных с компьютерами, роботами, искусственным интеллектом, машинным обучением, сетями, серверами и многим другим. Технологии представлены не только вашим смартфоном или ноутбуком. Технологии присутствуют в нашей повседневной жизни больше, чем мы даже осознаем.
Осознание влияния технологий — это шаг, который человечество должно сделать. Но осознание влияния технологических достижений на нашу жизнь — это то, над чем нам еще предстоит поработать. Технологии были очень важны для сферы образования, особенно в течение последнего года. Поскольку людям приходилось проводить больше времени в помещении, колледжи и университеты перешли на онлайн-обучение. Что само по себе было вызовом, как для студентов, так и для преподавателей. Тем не менее, будущее светлое, и роботы могут начать использоваться учителями в классах. Почему?
Что само по себе было вызовом, как для студентов, так и для преподавателей. Тем не менее, будущее светлое, и роботы могут начать использоваться учителями в классах. Почему?
Потому что роботы могут помогать учителям и улучшать обучение учащихся в классах, облегчая работу учителей. Использование робота в классе — хорошая вещь, особенно в начале, когда многие не хотели бы этого делать. Но, как говорят авторы эссе на технологические темы, роботы действительно могут сделать преподавание и обучение более эффективным и успешным. Как? Узнайте ниже.
Повторяющиеся задачи
Искусственный интеллект и машинное обучение не ограничиваются такими областями, как финансы или поддержка клиентов. Их также можно легко использовать и интегрировать в образование. Как говорят авторы-эксперты из службы эссе, искусственный интеллект и машинное обучение в основном имеют целью сокращение повторяющихся и рутинных задач. Некоторые из всех задач могут быть выполнены роботом, особенно потому, что они повторяются и просты. Все, что вам нужно, это следовать процедуре или рабочему процессу, и результат будет исключительным. Вот одна из частей, где роботы могут помочь учителям в образовании.
Все, что вам нужно, это следовать процедуре или рабочему процессу, и результат будет исключительным. Вот одна из частей, где роботы могут помочь учителям в образовании.
В то же время они также помогут студентам улучшить процесс обучения. У студентов есть много задач, о которых нужно позаботиться и написать во время учебы. А иногда преподаватели только читают их и отвечают на их вопросы, проводя своих учеников через бурные воды академического письма.
Как робот может помочь учителю в этом вопросе? Что ж, некоторые исследования и эксперименты уже были проведены, и результаты обнадеживают. Есть эксперимент профессора, который нанял много ассистентов, чтобы помочь ему ответить на вопросы студентов, которые были отправлены по электронной почте. Что ж, одним из этих помощников учителя был робот. Только один из всех студентов, которые разговаривали по электронной почте с роботом-помощником, был подозрительным.
Почему? Потому что робот очень быстро отвечал на все вопросы, чего обычно не бывает с гуманными ассистентами. И это понятно. Как робот, управляемый искусственным интеллектом, они имеют доступ к базе данных с информацией. Легко найти и извлечь необходимую информацию за считанные секунды. Роботы могут использоваться для выполнения повторяющихся задач и помогать учителям в доставке учебного материала. Более того, роботы могут улучшить обучение учащихся, потому что они быстрые и надежные.
И это понятно. Как робот, управляемый искусственным интеллектом, они имеют доступ к базе данных с информацией. Легко найти и извлечь необходимую информацию за считанные секунды. Роботы могут использоваться для выполнения повторяющихся задач и помогать учителям в доставке учебного материала. Более того, роботы могут улучшить обучение учащихся, потому что они быстрые и надежные.
Делегирование повторяющихся задач поможет учителям больше сосредоточиться на других задачах, которые могут быть более сложными, чем другие. Более того, они могут использовать сэкономленное время для индивидуальной работы со студентами и сосредоточиться на потребностях каждого из них.
Роботы могут помочь в обучении
Одним из преимуществ использования роботов в классе является то, что они могут помочь в обучении. В зависимости от того, на что вы запрограммируете робота, он может помочь учащимся в процессе обучения, пока они находятся в классе. Он может отвечать на вопросы, давать предложения или просто повышать вовлеченность учащихся. Роботы могут стать правой рукой учителей, которым трудно сосредоточиться и удовлетворить потребности и ожидания всех учащихся.
Роботы могут стать правой рукой учителей, которым трудно сосредоточиться и удовлетворить потребности и ожидания всех учащихся.
Однако важно знать подход ученика к роботу. Могут быть случаи, когда роботы используются не по назначению, и учащиеся привязываются к ним. Очень важно знать об этом как учителю и подчеркивать, что роботы не используются в качестве замены учителя или человека-компаньона.
Роботы делают обучение более увлекательным
Как утверждают авторы-эксперты, предлагающие помощь в выполнении заданий по преподаванию предметов, роботы могут сделать обучение более увлекательным. Обычно это один из ингредиентов, которые могут ускорить процесс обучения и повысить его ценность. Когда учащиеся находятся в классе и им скучно, удержание информации становится более трудным. Если эта тема никому не интересна, студенты останутся с нулевыми знаниями после урока. Как учителю, важно знать об этом. Некоторые предметы, естественно, более скучны, чем другие, поэтому немного приправы могут сделать обучение более интересным и увлекательным.
Роботы уже используются в Финляндии, чтобы помочь детям еще больше развить свои языковые и математические навыки. Это хорошая вещь и усовершенствование учебного процесса, доказавшего свою эффективность. Почему? Потому что роботы дружелюбны и веселы. Потому что они не осуждают вас за ваши ошибки, которых в процессе обучения может быть довольно много. Потому что роботы никогда не устанут повторять одно и то же, и они не заставят вас чувствовать себя плохо из-за непонимания.
Кроме того, роботы могут настраивать учебный процесс и адаптировать его к уровню каждого учащегося, что делает весь процесс более плавным. И одно из главных преимуществ заключается в том, что обучение с роботом становится более увлекательным, веселым и интересным. Несмотря на то, что поначалу могут быть ученики, которые могут сопротивляться, обучение с роботом — приятный опыт. Просто наблюдайте за тем, как это делают ваши коллеги, и у вас сразу же возникнет соблазн попробовать это. Судя по отзывам на сайте paper. org, это может оказаться поучительным опытом.
org, это может оказаться поучительным опытом.
Заключение
Технологии значительно продвинулись за последние несколько лет. Роботы становятся неотъемлемой частью всего учебного процесса, помогая учителям в достижении их целей. Их можно использовать для уменьшения количества повторяющихся задач, которые отнимают много времени у учителей. Таким образом, в то время как роботы могут выполнять эти повторяющиеся и рутинные задачи, учителя могут использовать это время, чтобы сосредоточиться на более сложных задачах или помогать учащимся и направлять их.
Роботы могут сделать обучение более интересным и увлекательным, выступая в качестве поддерживающего и мотивирующего помощника в обучении. Это потому, что они не осуждают и могут настраивать и адаптировать учебный опыт к знаниям и уровню каждого ученика. Это делает как преподавание, так и обучение более эффективным, плавным и успешным.
Узнайте больше о роботах с помощью RobotLAB
Обучение роботов осязанию
Вилка в руке, рука робота нанизывает клубнику сверху и подает ее в рот Тайлеру Шренку. Сидя в инвалидной коляске, Шренк наклоняет шею вперед, чтобы откусить. Далее рука идет за кусочком банана, затем за морковкой. Каждое движение он выполняет сам по себе, по голосовой команде Шренка.
Сидя в инвалидной коляске, Шренк наклоняет шею вперед, чтобы откусить. Далее рука идет за кусочком банана, затем за морковкой. Каждое движение он выполняет сам по себе, по голосовой команде Шренка.
Для Шренка, который был парализован ниже шеи после несчастного случая при нырянии в 2012 году, такое устройство имело бы огромное значение в его повседневной жизни, если бы оно было у него дома. «Привыкнуть к тому, что меня кормит кто-то другой, было одной из самых странных вещей, к которым мне пришлось перейти», — говорит он. «Это определенно поможет моему благополучию и моему психическому здоровью».
Его дом уже оборудован голосовыми выключателями питания и открывателями дверей, что позволяет ему быть независимым около 10 часов в день без присмотра. «Я смог понять большую часть этого, — говорит он. «Но питаться самостоятельно — это не то, что я могу сделать». Вот почему он хотел протестировать кормящего робота, получившего название ADA (сокращение от «вспомогательная ловкая рука»). Камеры, расположенные над развилкой, позволяют ADA видеть, что нужно забрать. Но знание того, с какой силой втыкать вилку в мягкий банан или хрустящую морковку и как крепко сжимать посуду, требует чувства, которое люди считают само собой разумеющимся: «Прикосновение — это ключ», — говорит Тапомаюх Бхаттачарджи, робототехник из Корнельского университета в Итака, штат Нью-Йорк, руководивший разработкой ADA во время работы в Вашингтонском университете в Сиэтле. Два пальца робота снабжены датчиками, измеряющими боковую (или сдвигающую) силу при удержании вилки 1 . Система является лишь одним из примеров растущих усилий по наделению роботов чувством осязания.
Камеры, расположенные над развилкой, позволяют ADA видеть, что нужно забрать. Но знание того, с какой силой втыкать вилку в мягкий банан или хрустящую морковку и как крепко сжимать посуду, требует чувства, которое люди считают само собой разумеющимся: «Прикосновение — это ключ», — говорит Тапомаюх Бхаттачарджи, робототехник из Корнельского университета в Итака, штат Нью-Йорк, руководивший разработкой ADA во время работы в Вашингтонском университете в Сиэтле. Два пальца робота снабжены датчиками, измеряющими боковую (или сдвигающую) силу при удержании вилки 1 . Система является лишь одним из примеров растущих усилий по наделению роботов чувством осязания.
Часть Nature Outlook: робототехника и искусственный интеллект
«Действительно важные вещи связаны с манипулированием, когда робот протягивает руку и что-то меняет в мире», — говорит Тед Адельсон, специалист по компьютерному зрению из Массачусетского технологического института (MIT) в Кембридже. Только с тактильной обратной связью робот может настроить свою хватку для работы с объектами разных размеров, форм и текстур. С помощью прикосновения роботы могут помогать людям с ограниченной подвижностью, поднимать мягкие предметы, такие как фрукты, обращаться с опасными материалами и даже помогать в хирургии. Тактильное восприятие также может улучшить протезирование, помочь людям буквально оставаться на связи издалека и даже сыграть свою роль в реализации фантазии универсального домашнего робота, который будет заботиться о стирке и посуде. «Если мы хотим, чтобы роботы в нашем доме помогали нам, мы хотели бы, чтобы они могли использовать свои руки», — говорит Адельсон. «И если вы используете свои руки, вам действительно нужно осязание».
Только с тактильной обратной связью робот может настроить свою хватку для работы с объектами разных размеров, форм и текстур. С помощью прикосновения роботы могут помогать людям с ограниченной подвижностью, поднимать мягкие предметы, такие как фрукты, обращаться с опасными материалами и даже помогать в хирургии. Тактильное восприятие также может улучшить протезирование, помочь людям буквально оставаться на связи издалека и даже сыграть свою роль в реализации фантазии универсального домашнего робота, который будет заботиться о стирке и посуде. «Если мы хотим, чтобы роботы в нашем доме помогали нам, мы хотели бы, чтобы они могли использовать свои руки», — говорит Адельсон. «И если вы используете свои руки, вам действительно нужно осязание».
Помня об этой цели и опираясь на достижения в области машинного обучения, исследователи по всему миру разрабатывают множество тактильных датчиков, от устройств в форме пальцев до электронных кож. Идея не нова, говорит Вероника Сантос, робототехник из Калифорнийского университета в Лос-Анджелесе. Но достижения в области аппаратного обеспечения, вычислительной мощности и алгоритмических ноу-хау активизировали эту область. «Существует новое чувство волнения по поводу тактильного восприятия и того, как интегрировать его с роботами», — говорит Сантос.
Но достижения в области аппаратного обеспечения, вычислительной мощности и алгоритмических ноу-хау активизировали эту область. «Существует новое чувство волнения по поводу тактильного восприятия и того, как интегрировать его с роботами», — говорит Сантос.
На ощупь
Один из самых многообещающих датчиков основан на хорошо зарекомендовавшей себя технологии: камерах. Сегодняшние камеры недорогие, но мощные, и в сочетании со сложными алгоритмами компьютерного зрения они привели к появлению множества тактильных датчиков. В разных дизайнах используются немного разные методы, но все они интерпретируют прикосновение, визуально фиксируя, как материал деформируется при контакте.
ADA использует популярный датчик на основе камеры под названием GelSight, первый прототип которого был разработан Адельсоном и его командой более десяти лет назад 2 . Свет и камера находятся за куском мягкого резинового материала, который деформируется, когда на него что-то давит.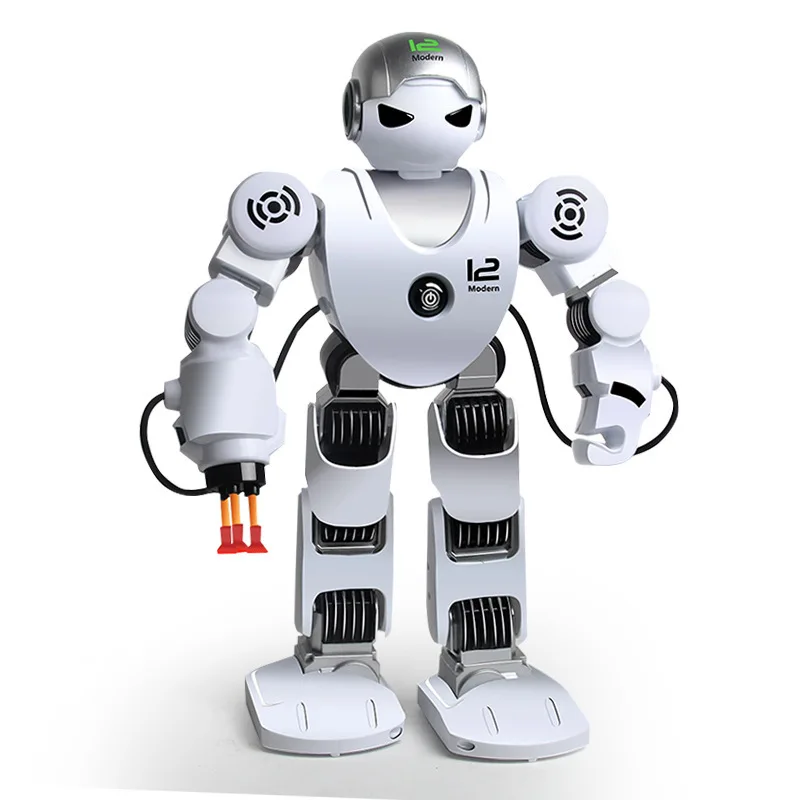 Затем камера фиксирует деформацию со сверхчеловеческой чувствительностью, различая неровности размером до одного микрометра. GelSight также может оценивать силы, в том числе силы сдвига, путем отслеживания движения узора из точек, напечатанных на резиновом материале по мере его деформации 2 .
Затем камера фиксирует деформацию со сверхчеловеческой чувствительностью, различая неровности размером до одного микрометра. GelSight также может оценивать силы, в том числе силы сдвига, путем отслеживания движения узора из точек, напечатанных на резиновом материале по мере его деформации 2 .
GelSight — не первый и не единственный датчик на основе камеры (ADA тестировался с другим, названным FingerVision). Тем не менее, его относительно простая и легкая в изготовлении конструкция до сих пор отличала его, говорит Роберто Каландра, научный сотрудник Meta AI (ранее Facebook AI) в Менло-Парке, Калифорния, который сотрудничал с Адельсоном. В 2011 году Адельсон стал соучредителем компании, также называемой GelSight, на основе разработанной им технологии. Фирма, базирующаяся в Уолтеме, штат Массачусетс, сосредоточила свои усилия на таких отраслях, как аэрокосмическая, используя сенсорную технологию для обнаружения трещин и дефектов на поверхностях.
GelSight, датчик на основе камеры, может использоваться для трехмерного анализа фюзеляжей самолетов (слева). Составные изображения, которые он создает (справа), показывают трещины и дефекты. Предоставлено: GelSight
.
Один из новейших сенсоров на основе камеры называется Insight, задокументированный в этом году Хуанбо Сан, Кэтрин Кухенбекер и Георгом Мартиусом в Институте интеллектуальных систем им. Макса Планка в Штутгарте, Германия, 3 . Пальцеобразное устройство состоит из мягкого непрозрачного шатрообразного купола, поддерживаемого тонкими распорками, внутри которого скрывается камера.

Он не такой чувствительный, как GelSight, но предлагает другие преимущества. По словам Кухенбекера, GelSight ограничивается обнаружением контакта на небольшом плоском участке, в то время как Insight обнаруживает касание вокруг пальца в 3D. Силиконовую поверхность Insight также легче изготовить, и она более точно определяет силы. Кухенбекер говорит, что неровная внутренняя поверхность Insight позволяет легче увидеть силы, и в отличие от метода GelSight, который сначала определяет геометрию деформированной резиновой поверхности, а затем вычисляет задействованные силы, Insight определяет силы непосредственно по тому, как свет попадает на его камеру. Кухенбекер считает, что это делает Insight лучшим вариантом для робота, которому нужно захватывать объекты и манипулировать ими; Insight был разработан для формирования кончиков трехзначного робота-захвата под названием TriFinger.
Решения для кожи
Сенсоры на основе камер не идеальны. Например, они не могут ощущать невидимые силы, такие как величина натяжения натянутой веревки или проволоки. По словам Сантоса, частота кадров камеры также может быть недостаточно быстрой, чтобы запечатлеть мимолетные ощущения, такие как проскальзывание. И втиснуть относительно громоздкий датчик на основе камеры в палец или руку робота, который уже может быть переполнен другими датчиками или исполнительными механизмами (компонентами, которые позволяют руке двигаться), также может представлять проблему.
Это одна из причин, по которой другие исследователи разрабатывают плоские и гибкие устройства, которые могут обвиваться вокруг придатка робота. Женан Бао, инженер-химик из Стэнфордского университета в Калифорнии, разрабатывает кожу, которая включает в себя гибкую электронику и воспроизводит способность тела чувствовать прикосновение. Например, в 2018 году ее группа создала кожу, которая определяет направление сил сдвига, имитируя неровную структуру подповерхностного слоя кожи человека, называемую шипом 4 .
Женан Бао — инженер-химик из Стэнфордского университета в Калифорнии. Фото: Bao Lab
Когда легкое прикосновение прижимает внешний слой кожи человека к куполообразным шишкам шиповидной кости, рецепторы в шишках чувствуют давление. Более твердое прикосновение активирует более глубокие рецепторы, расположенные под бугорками, и отличает жесткое прикосновение от мягкого. А боковая сила ощущается как давление, давящее сбоку от неровностей.
Электронная кожа Бао также имеет неровную структуру, которая ощущает интенсивность и направление сил. Каждая миллиметровая выпуклость покрыта 25 конденсаторами, которые накапливают электроэнергию и действуют как отдельные датчики. Когда слои прижимаются друг к другу, количество накопленной энергии изменяется. Поскольку датчики настолько малы, говорит Бао, участок электронной кожи может упаковать их много, позволяя коже точно ощущать силы и помогая роботу выполнять сложные манипуляции с объектом.
Чтобы протестировать кожу, исследователи прикрепили пластырь к кончику пальца резиновой перчатки, которую носила рука робота. Рука могла погладить верхушку малины и взять мячик для пинг-понга, не раздавив ни того, ни другого.
Женан Бао и ее группа из Стэнфордского университета в Калифорнии создали электронную кожу, которая может взаимодействовать с деликатными объектами, такими как малина. Фото: Bao Lab
Хотя другие электронные скины могут быть не такими плотными, их, как правило, легче изготовить. В 2020 году Бенджамин Ти, бывший студент Бао, который сейчас возглавляет собственную лабораторию в Национальном университете Сингапура, разработал губчатый полимер, способный воспринимать силы сдвига 9. 0059 5 . Кроме того, подобно человеческой коже, она самовосстанавливается: после разрыва или пореза она снова срастается при нагревании и остается эластичной, что полезно для борьбы с износом.
В материал, получивший название AiFoam, встроены гибкие электроды из медной проволоки, примерно имитирующие распределение нервов в коже человека. При прикосновении пена деформируется, а электроды сжимаются, что изменяет электрический ток, проходящий через нее. Это позволяет измерять как силу, так и направление сил. AiFoam может даже ощущать присутствие человека непосредственно перед тем, как он вступает в контакт — когда его палец оказывается на расстоянии нескольких сантиметров, он снижает электрическое поле между электродами пены.
AiFoam представляет собой губчатый полимер, способный воспринимать силы сдвига и самовосстанавливаться. Предоставлено: Национальный университет Сингапура
.
В ноябре прошлого года исследователи из Meta AI и Университета Карнеги-Меллона в Питтсбурге, штат Пенсильвания, объявили о чувствительной к прикосновениям коже, состоящей из каучукового материала со встроенными магнитными частицами 6 . Названный ReSkin, когда он деформируется, частицы движутся вместе с ним, изменяя магнитное поле. Его легко заменить — его можно снять и установить новую оболочку, не требуя сложной повторной калибровки, а 100 датчиков можно произвести менее чем за 6 долларов США.
Вместо того, чтобы быть универсальными инструментами, различные скины и датчики, вероятно, будут использоваться для определенных целей. Бхаттачарджи и его коллеги, например, создали эластичный рукав, который надевается на манипулятор робота и полезен для обнаружения случайного контакта между манипулятором робота и окружающей средой 7 . Лист изготовлен из многослойной ткани, которая обнаруживает изменения электрического сопротивления при воздействии на нее давления. Он не может обнаруживать силы сдвига, но может охватывать большую площадь и охватывать суставы робота.
Бхаттачарджи использует рукав, чтобы определить не только то, когда робот-манипулятор вступает в контакт с чем-то, когда он движется в загроможденной среде, но и то, с чем он сталкивается. Если робот-помощник в доме задел занавеску, пытаясь дотянуться до предмета, для него может быть нормально продолжать движение, но контакт с хрупким бокалом для вина потребует действий уклонения.
Другие подходы используют воздух, чтобы обеспечить осязание. Некоторые роботы используют присоски для захвата и перемещения объектов на складах или в океане. В этих случаях Ханна Стюарт, инженер-механик из Калифорнийского университета в Беркли, надеется, что измерение потока всасываемого воздуха может обеспечить тактильную обратную связь с роботом. Ее группа показала, что скорость воздушного потока может определять силу захвата присосками и даже шероховатость поверхности, на которой они присасываются до 9 градусов.0059 8 . А под водой он может показать, как движется объект, удерживаемый рукой робота с присосками 9 .
Обработка чувств
Сегодняшние тактильные технологии разнообразны, говорит Кухенбекер. «Есть несколько возможных вариантов, и люди могут опираться на работу других», — говорит она. Но проектирование и изготовление датчиков — это только начало. Затем исследователи должны интегрировать их в робота, который затем должен решить, как использовать информацию датчика для выполнения задачи. «На самом деле это будет самая сложная часть», — говорит Адельсон.
Для электронных оболочек, содержащих множество сенсоров, обработка и анализ данных от них всех потребует больших вычислительных и энергоемких ресурсов. Чтобы обрабатывать такое количество данных, исследователи, такие как Бао, черпают вдохновение в человеческой нервной системе, которая с легкостью обрабатывает постоянный поток сигналов. Ученые-компьютерщики уже более 30 лет пытаются имитировать нервную систему с помощью нейроморфных компьютеров. Но цель Бао — объединить нейроморфный подход с гибкой кожей, которая могла бы легко интегрироваться с телом — например, на бионической руке.
Подпишитесь на информационный бюллетень Nature о робототехнике и искусственном интеллекте
В отличие от других тактильных датчиков, кожа Бао передает сенсорные сигналы в виде электрических импульсов, таких как биологические нервы. Информация хранится не в интенсивности импульсов, которая может ослабевать по мере прохождения сигнала, а в их частоте. В результате сигнал не теряет много информации по мере увеличения диапазона, объясняет она.
Импульсы от нескольких датчиков будут встречаться в устройствах, называемых синаптическими транзисторами, которые объединяют сигналы в последовательность импульсов — подобно тому, что происходит, когда нервы встречаются в синаптических соединениях. Затем, вместо обработки сигналов от каждого датчика, алгоритм машинного обучения должен только анализировать сигналы от нескольких синаптических соединений, изучая, соответствуют ли эти паттерны, скажем, пуху свитера или захвату мяча.
В 2018 году лаборатория Бао встроила эту функцию в простую, гибкую искусственную нервную систему, которая могла распознавать символы Брайля 10 . Прикрепленное к ноге таракана устройство могло стимулировать нервы насекомого, демонстрируя потенциал протеза, который мог бы интегрироваться с нервной системой живого существа.
В конечном счете, чтобы понять данные датчиков, робот должен полагаться на машинное обучение. По словам Каландры, обычно обработка необработанных данных датчика была утомительной и сложной. Чтобы понять необработанные данные и преобразовать их в физически значимые числа, такие как сила, робототехникам пришлось откалибровать и охарактеризовать датчик. Благодаря машинному обучению робототехники могут пропустить эти трудоемкие шаги. Алгоритмы позволяют компьютеру просеивать огромное количество необработанных данных и самостоятельно выявлять значимые закономерности. Эти паттерны, которые могут представлять собой достаточно сильное сцепление или грубую текстуру, можно изучить из данных обучения или из компьютерного моделирования предполагаемой задачи, а затем применить в реальных сценариях.
«На самом деле мы только начали исследовать возможности искусственного интеллекта для распознавания прикосновений, — говорит Каландра. «Мы далеки от зрелости других областей, таких как компьютерное зрение или обработка естественного языка». По его словам, данные компьютерного зрения основаны на двумерном массиве пикселей — подходе, который ученые-компьютерщики использовали для разработки лучших алгоритмов. Но исследователи до сих пор не до конца знают, какой может быть сопоставимая структура для тактильных данных. Понимание структуры этих данных и изучение того, как использовать их для создания лучших алгоритмов, станет одной из самых больших проблем следующего десятилетия.
Снятие барьера
Бум машинного обучения и разнообразие новых аппаратных средств предвещают будущее тактильного восприятия. Но изобилие технологий также является проблемой, говорят исследователи. Поскольку у многих лабораторий есть собственное прототипное оборудование, программное обеспечение и даже форматы данных, ученым трудно сравнивать устройства и опираться на результаты работы друг друга. И если робототехники захотят впервые внедрить распознавание касаний в свою работу, им придется создавать свои собственные датчики с нуля — часто дорогостоящая задача, и не обязательно в их области знаний.
Еще из Nature Outlooks
Вот почему в ноябре прошлого года GelSight и Meta AI объявили о партнерстве по производству сенсора на основе камеры под названием DIGIT. При указанной цене в 300 долларов устройство разработано как стандартный, относительно дешевый, готовый датчик, который можно использовать в любом роботе. «Это определенно помогает сообществу робототехники, потому что этому сообществу мешает высокая стоимость оборудования», — говорит Сантос.
Однако, в зависимости от задачи, вам не всегда нужно такое передовое оборудование. В статье, опубликованной в 2019 г., группа в Массачусетском технологическом институте под руководством Субраманиана Сундарама построила датчики, соединив вместе несколько слоев материала, которые изменяют электрическое сопротивление под давлением 11 . Затем эти датчики были встроены в перчатки, а общая стоимость материала составила всего 10 долларов. По словам Сундарама, с помощью машинного обучения даже такой простой инструмент может помочь робототехникам лучше понять нюансы захвата.
Не каждый робототехник также является специалистом по машинному обучению. Чтобы помочь в этом, Meta AI выпустила программное обеспечение с открытым исходным кодом для использования исследователями. «Я надеюсь, что открывая эту экосистему с открытым исходным кодом, мы снижаем планку входа для новых исследователей, которые хотят подойти к проблеме», — говорит Каландра. «Это действительно начало».
Хотя захват и ловкость по-прежнему находятся в центре внимания робототехники, тактильное восприятие полезно не только для этого. Мягкому, скользящему роботу, возможно, потребуется нащупать дорогу, чтобы перемещаться по завалам, например, в рамках поисково-спасательных операций. Или роботу просто нужно похлопать себя по спине: Кухенбекер и ее ученица Алексис Блок построили робота с датчиками крутящего момента в руках, а также датчиком давления и микрофоном внутри мягкого надувного тела, которое может дарить удобные и приятные объятия. , а затем отпустите, когда отпустите. Такое человеческое прикосновение необходимо для многих роботов, которые будут взаимодействовать с людьми, включая протезы, помощников по дому и удаленных аватаров.