Содержание
Самообучаемый робот Anki Cozmo — гаджет с характером и технологией распознавания лиц
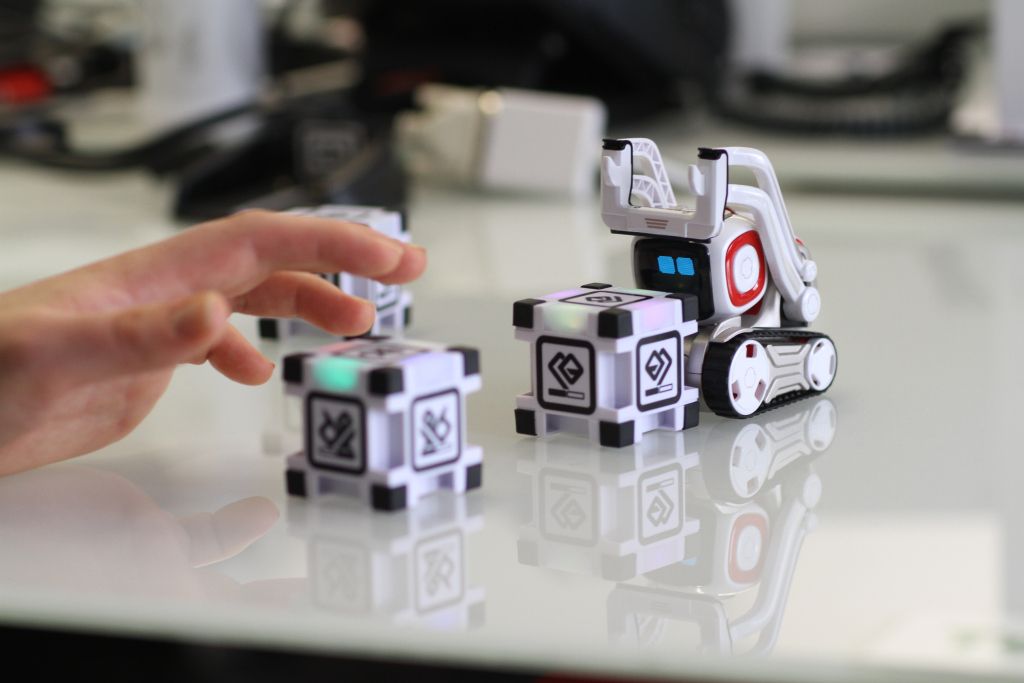
Внешне миниатюрный Cozmo похож на милого вилочного погрузчика и чем-то напоминает адаптированную версию знаменитого Wall-E из одноименного мультика. При очень скромных габаритах (85 х 70 х 55 мм) игровой гаджет представляет собой потрясающее высокотехнологичное устройство: робот сделан более чем из 300 деталей, над созданием которых трудилось множество инженеров Anki. Малыш снабжен целым рядом датчиков: например, на днище робота есть инфракрасный сенсор, защищающий его от падения. Встроенный акселерометр и электронный гироскоп, в свою очередь, позволяют ему ориентироваться в пространстве — аналогичные системы используются в современных смартфонах.
В свою очередь, камера, расположенная у Cozmo на «голове», выполняет функцию глаз — с ее помощью робот распознает лица и препятствия. Передвигается он на гусеницах, а вместо рук использует специальный манипулятор. Для управления движущимися блоками внутри конструкции размещено более 50 маленьких шестеренок, которые передают усилие от моторов.
Благодаря изящно написанному софту и удачным инженерным решениям Cozmo кажется живым существом, а уж никак не бесчувственной машиной. Чего только стоит его мимика, которая меняется в зависимости от его настроения и окружающей обстановки! Всего предусмотрено более 20 различных выражений «лица» — в данном случае его роль выполняет компактный жидкокристаллический экран с разрешением 124 х 64р. Эмоции робота выражаются еще и вербально — голос Cozmo похож на голос его «собрата» R2-D2 из саги «Звездные войны». Более того, робот умеет выражать свои эмоции действиями: например, от досады он может опрокинуть игровые кубики, а от радости за свои достижения — совершить круг почета. У него действительно есть характер, причем довольно шкодный!
Еще одна интересная технология, которую разработчики вложили в этого мини-робота, — так называемое компьютерное зрение. Это один из последних трендов в робототехнике — и стоит признать, что команда Anki превосходно справилась с реализацией идеи! Именно с помощью этой функции робот может «знакомиться» с людьми и запоминать их лица. Cozmo умеет различать даже домашних животных и очень любит шутить над ними. Он может аккуратно подъехать к питомцу и неожиданно цапнуть его манипулятором! Разумеется, такие игры полностью безопасны для животных, тут защищать придется, скорее, самого робота.
Cozmo умеет различать даже домашних животных и очень любит шутить над ними. Он может аккуратно подъехать к питомцу и неожиданно цапнуть его манипулятором! Разумеется, такие игры полностью безопасны для животных, тут защищать придется, скорее, самого робота.
Для взаимодействия с Cozmo предусмотрено одноименное приложение, которое совместимо с большинством мобильных устройств, работающих под управлением Android и iOS. Программа выполнена в формате игры — в которой даже есть своя внутренняя валюта! Её можно зарабатывать во время игр с роботом: для этого разработчики предусмотрели по три занимательных задания в день. Выполнять их весело и интересно, а робот при этом знакомится с миром и постоянно накапливает знания. Тратить валюту можно на разблокировку новых трюков и игр.
В комплект поставки входит набор из трех сенсорных кубиков со светодиодной подсветкой — они используются в прописанных играх. Например, в Keepaway пользователь подносит кубик Cozmo и постоянно его передвигает, а робот при этом пытается нажать на сенсорную панель своим манипулятором. Если он промахивается — очко начисляется пользователю, если попадает — ему самому. Первоначально предусмотрено шесть игровых режимов.
Если он промахивается — очко начисляется пользователю, если попадает — ему самому. Первоначально предусмотрено шесть игровых режимов.
Вторая игра называется Quick Tap: в ней пользователь располагает один интерактивный кубик перед роботом, а второй — перед собой. Панели будут загораться разными цветами, и когда подсветка окажется одинаковой, оба игрока должны прикоснуться к своим аксессуарам. А вот в Memory Match все три кубика начинают загораться разными цветами и издавать определенные звуки, в то время как пользователь и робот должны максимально точно повторить эту последовательность.
Производитель продолжает разработку игр, поэтому в ближайшем будущем в приложении появятся новые интересные опции. Кстати, пользователь может сам написать свою программу, если владеет языком Python — для этого предусмотрен комплект средств разработки.
Помимо прочего, Cozmo может выполнять трюки, поворачиваться и подниматься, если устал. А еще он умеет всячески переворачивать кубики — в том числе составлять из них пирамидку. Игривый робот способен даже охотиться за пальцами пользователя, совсем как кот — только не царапается! Любознательный малыш совсем не умеет сидеть на одном месте. Когда ему становится скучно, он самостоятельно изучает помещение или требует внимания! Так, он может взять кубик и принести его хозяину — при этом на экране смартфона отображается приглашение в одну из игр.
Игривый робот способен даже охотиться за пальцами пользователя, совсем как кот — только не царапается! Любознательный малыш совсем не умеет сидеть на одном месте. Когда ему становится скучно, он самостоятельно изучает помещение или требует внимания! Так, он может взять кубик и принести его хозяину — при этом на экране смартфона отображается приглашение в одну из игр.
Также в приложении предусмотрены дополнительные развлекательные функции. Например, в режиме Cozmo Says робот озвучит своим неповторимым «голосом» предложенный текст. Еще одна функция предназначена для знакомства с людьми — для этого нужно ввести свое имя и посмотреть ему прямо «в глаза». Также доступен режим исследования — в нем пользователь получает полный контроль над движениями робота. Изображение с камеры при этом будет поступать прямо на синхронизированный смартфон, управление производится с помощью виртуальных джойстиков в приложении.
Cozmo работает от встроенного аккумулятора, которого хватает на 2 часа активной игры. При этом заряжается он всего за 10 минут, так что долго скучать без электронного друга не придется! О севшей батарее робот сообщит звуковым сигналом. Для подзарядки используется фирменная зарядная станция, которая входит в комплект поставки. Игровые кубики, в свою очередь, работают от батареек LR1 — они уже установлены в каждый из трех аксессуаров.
При этом заряжается он всего за 10 минут, так что долго скучать без электронного друга не придется! О севшей батарее робот сообщит звуковым сигналом. Для подзарядки используется фирменная зарядная станция, которая входит в комплект поставки. Игровые кубики, в свою очередь, работают от батареек LR1 — они уже установлены в каждый из трех аксессуаров.
РобоЗона | РОБОТОТЕХНИКА
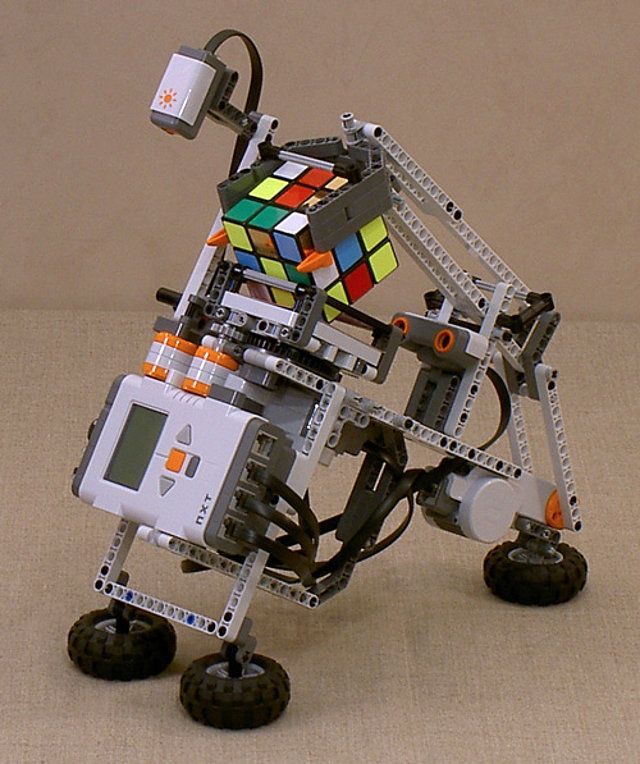
В этом состязании участникам необходимо создать готового робота, способного определять цвета кубиков и развозить их по соответствующим цветовым зонам. Участником соревнования является команда от 1 до 3 человек в возрасте 7-17 лет.
1. Условия задания
1.1. Участник должен собрать и запрограммировать робота, который способен переместить цветные кубики в соответствующие цветовые зоны.
1.2. В состязании участвуют готовые роботы, участнику не нужно собирать робота в день соревнования.
1.3. Роботы изготавливаются из образовательных робототехнических наборов (Lego, Fischertechnik, VEX, Huna, TRIK, Robotis, Arduino).
1.4. Робот должен автономно перемещать кубики из зоны «склад» в цветовую зону кубиков.
1.5. Кубик состоит из кирпичиков Lego 6х6 модулей и прикреплен к пьедесталу состоящего из кирпичиков Lego 4х4 модуля. Высота пьедестала в 1 кирпичик Lego, высота кубика – 4 кирпичика Lego.
размер кубика
1.6. Расположение цветовых зон, куда нужно привезти кубик не меняется на протяжении всего состязания.
1.7. Цветовая гамма зон и кубиков не меняется на протяжении всего состязания.
1.8. Для зон и кубиков используется желтый, синий, красный и зеленый цвета. Используется цветовая палитра Lego.
1.9. Расположение цветных кубиков в «складе» определяется методом жеребьевки перед первым и вторым раундом, после периода отладки (когда роботы находятся в карантине).
1.10 Старт робота осуществляется из зоны «Старт». Из двух возможных вариантов старта участник вправе выбрать любой.
1.11. Робот может перемещаться по полю любым удобным способом, не покидая пределы поля. Движение робота по черной линии не обязательно.
Движение робота по черной линии не обязательно.
1.12. За перемещение кубика нужного цвета в соответствующую зону начисляется 25 очков. Кубик должен касаться поверхности цветовой зоны поля. Если кубик касается поверхности цветовой зоны не того цвета начисляется 10 очков. Если кубик не касается поверхности цветовой зоны (например, находится на роботе), но находится в цветовой зоне нужного цвета – начисляется 5 очков.
1.13. Очки за размещенные кубики начисляются в том случае, если кубик полностью находится в цветовой зоне. Если кубик частично выходит из зоны – очки не начисляются.
1.14. Подсчет очков производится, когда робот полностью выполнил задание, т.е. развез все кубики из зоны «склад» по цветовым зонам, или участник сказал «Стоп». В случае, если во время выполнения задания, робот сам задел или вытолкнул один из кубиков из цветовой зоны очки за данный кубик не начисляются.
1.15. Если робот перестает отвечать на команды и его движение становится хаотичным или он останавливается и в течение 20 секунд остается неподвижным, то в зачет участнику идут очки, заработанные до этого момента.
2. Поле
2.1. Поле состоит из основания с бортами с внутренними размерами 1200 х 1200 мм.
2.2. Поле состоит из типовых плиток размером 300 х 300мм, на которые нанесена черная линия размером 25 мм.
2.3. Цветовые зоны состоят из плиток 300 х 300 мм на которые приклеен цветной картон.
2.4. Допустимый перепад поверхности не более 1 мм .
2.5. Высота бортов – 30 мм.
2.6. Места в которых расолагаются кубики находится на перекрестках и углах зоны «склад» и никак не выделены на поле.
(На рисунке изображены места где будут располагаться кубики)
3. Робот
3.1. Робот должен быть изготовлен из элементов набора Lego, Fischertechnik, VEX, Huna, TRIK, Robotis, Arduino, колличество используемых моторов и датчиков ограничено:
— 1 блок управления;
— 4 мотора;
— 4 датчика.
Для сборки робота могут быть задействованы детали, датчики и моторы только те, которые входят в состав набора одной фирмы. (При использовании наборов Arduino допускается использование деталей из образовательных наборов других фирм, но одной марки. Использование датчиков, моторов и колес других фирм запрещено.)
(При использовании наборов Arduino допускается использование деталей из образовательных наборов других фирм, но одной марки. Использование датчиков, моторов и колес других фирм запрещено.)
3.2. Для участия в соревнованиях используется робот «домашней» заготовки.
3.3. На робота не накладывается ограничений по массе.
3.4. На робота накладываются ограничения по размеру – 25х25х25 см.
3.5. Запрещено использовать следующие комплектующие:
– клейкие приспособления на колесах и корпусе робота;
– смазки на открытых поверхностях робота;
– приспособления, дающие роботу повышенную устойчивость, например, вакуумную среду.
Участники, нарушившие вышеперечисленные запреты, снимаются с соревнований.
3.5. Робот должен быть автономным.
4. Порядок проведение этапа
4.1. Соревнование состоит из двух раундов для каждого робота, допущенного к соревнованию.
4.2. Перед стартом участникам отводится 40 минут на отладку робота.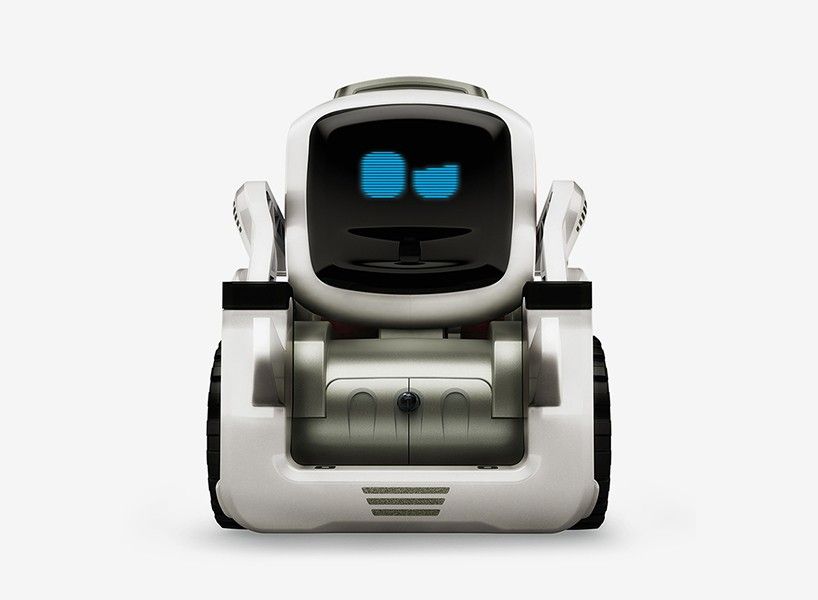
4.3. После первого раунда, участник может провести дополнительную модификацию робота и программы, на подготовку робота ко второму раунду отводится 20 минут.
4.4. По истечении указанного времени все роботы помещаются в зону карантина.
4.5. Соревнования начинаются после того, как судья подтвердит соответствие роботов всем требованиям.
4.6. Робота, находящегося в зоне карантина, нельзя модифицировать (например, загружать программу, менять батарейки) или менять.
4.7. Непосредственно перед началом соревнований робот помещается в стартовую зону так, чтобы все его части, касающиеся поля, находились внутри стартовой зоны.
4.8. По команде судьи «СТАРТ» участник должен запустить робота.
4.9. В течение 5 секунд после запуска робота оператор должен отойти от поля не менее чем на 0,5 метра.
4.10. Конфигурация поля одна и та же для всех роботов.
4.11. Оператор может попросить судью о досрочной остановке времени, громко сказав: «СТОП» и подняв руку. В этом случае в зачет участнику идут баллы, заработанные роботом до этого момента.
В этом случае в зачет участнику идут баллы, заработанные роботом до этого момента.
4.12. Выигрывает робот, набравший максимальное количество очков за наименьшее время.
5. Судейство
5.1. Оргкомитет оставляет за собой право вносить в правила состязаний любые изменения, если эти изменения не дают преимущества одной из команд.
5.2. Контроль за соревнованием и подведение итогов осуществляется судейской коллегией в соответствии с приведенными правилами.
5.3. Судьи обладают всеми полномочиями на протяжении всех состязаний. Все участники должны подчиняться их решениям.
5.4. В спорных ситуациях судья может назначить дополнительный раунд.
5.5. Если появляются какие-то возражения относительно судейства, команда имеет право в устном порядке обжаловать решение судей в Оргкомитете не позднее окончания текущего раунда.
5.6. Переигровка может быть проведена по решению судей в случае, если робот не смог завершить этап из-за постороннего вмешательства, либо из-за неисправности, возникшей по причине плохого состояния игрового поля, либо из-за ошибки, допущенной судейской коллегией.
5.7. Члены команд и их руководители не должны вмешиваться в действия робота своей команды или робота соперника ни физически, ни на расстоянии. Вмешательство ведет к немедленной дисквалификации участника соревнования.
6. Правила отбора победителя
6.1. Система ранжирования предусматривает балльную оценку выполнения задания. Очки в раунде начисляются за правильное размещение кубиков в цветовых зонах. При подведении итогов в первую очередь учитывается количество заработанных очков.
6.2. При одинаковом количестве набранных очков учитывается время, затраченное на выполнение задания.
Комплект для кубиков 10х10х10 мм Robot Coupe 28112
Комплект для кубиков 10х10х10 мм Robot Coupe 28112
официальный дилер
Корзина
- Главная
- Аксессуары
- Диски
- Кубики
- Комплект для кубиков 10х10х10 мм
по запросу
Артикул: 28112
Комплект для нарезки кубиками: 1 решетка для кубиков + 1 диск — нарезка специально для кубиков.
Применение
| Овощерезка | Артикул |
|---|---|
| CL 50 | 24440 |
| CL 50 Ultra | 24473 |
| CL 50 Gourmet 1ф | 24453 |
| CL 52 1ф | 24490 |
| CL 52 3ф | 24498 |
| CL 55 Авто 1ф | 2749 |
| CL 55 Авто 3ф | 2569 |
| CL 55 Рычаг 1ф | 2245 |
| CL 55 Рычаг 3ф | 2214 |
| CL 60 Авто | 2781 |
| CL 60 Рычаг | 2319 |
| CL 60 Рабочая станция | 2300 |
| CL 55 Рабочая станция | 2287 |
| Кухонный процессор | Артикул |
| R 502 | 2483 |
| R 652 | 2136 |
Входит в
| Артикул | |
|---|---|
| Комплект из 8 дисков | 1933 |
| Комплект из 5 дисков | 1960 |
| Комплект из 7 дисков | 1961 |
| Комплект из 16 дисков | 2022 |
Блоки роботов Cubelets — Modular Robotics
Строительные блоки для лучших мыслителей.

Что нового.
Знакомство с циклом Cubelets.
Cubelets Cycle — это школьная экскурсия по робототехнике. Просто зарезервируйте, получите и верните.
Почему блоки?
Из блоков можно строить все что угодно. Наш мир состоит из блоков. Деревянные и кирпичные блоки образуют наши дома. Внутри стеклянные блоки, заполненные кодовыми блоками, превращают свет в блоки букв, которые формируют наши перспективы.
А теперь блоки роботов могут помочь вам улучшить мышление.
Опыт, который мы создаем для учащихся, формирует их. Cubelets предназначены для того, чтобы помочь учащимся развивать когнитивные навыки. Таким образом, они могут решать самые большие проблемы и обучать всем стандартам, которые нам нужны.
Познакомьтесь с кубиками.
Кублеты — это блоки роботов, которые помогают обучать важным навыкам решения проблем, таким как совместная работа, проектирование, проектирование и вычислительное мышление.
Воспроизвести видео
Быстрый и простой способ создания роботов.
Кублеты — единственный способ построить робота, состоящего из группы меньших роботов.
Создан, чтобы встретить вас там, где вы находитесь.
Кублеты универсальны. Они используются исследователями Pre-K и докторами наук.
Любим педагогами во всем мире.
Ищите кубики везде, где происходит обучение — в классе, лагере, музее и дома.
Извлекайте самые важные уроки из мелочей.
Кубики используются для обучения навыкам, необходимым для решения самых больших жизненных проблем.
Как строительные блоки, только умнее.
Вы никогда не строили из таких блоков. Кублеты — это единственный способ построить робота, когда вы строите кучу крошечных роботов.
Объединяйте 17 уникальных видов кубиков различными способами, чтобы создавать бесчисленные конструкции роботов. Каждый дизайн — это новая конструкция робота, и все начинается с объединения трех основных категорий кублетов.
Хотите узнать больше?
Узнайте, как работают Cubelets, с помощью Руководства по началу работы. Или ознакомьтесь с некоторыми идеями роботов, чтобы увидеть, что вы можете построить.
Подходит… для всех.
Cubelets предназначены для детей от четырех лет и старше. Не позволяйте их возрастному рейтингу обмануть вас! Cubelets легко начать и усложнять по мере того, как вы узнаете больше.
Легко, для начала.
Уникальный дизайн Cubelets упрощает сборку роботов. Их размер и магнитные соединения идеально подходят для пользователей всех уровней квалификации. Нет необходимости кодировать — поведение возникает из вашей конструкции.
Если вы умеете строить из блоков, вы можете строить из кублетов.
Тогда просто комплекс.
Чем больше вы узнаете о Cubelets, тем сложнее они становятся.
С Cubelets всегда есть чему поучиться и открыть для себя. Когда вы будете готовы, бесплатные приложения Cubelets помогут вам изменить поведение любого Cubelet. Безграничные возможности.
Когда вы будете готовы, бесплатные приложения Cubelets помогут вам изменить поведение любого Cubelet. Безграничные возможности.
Регистратор данных.
Узнайте, как кублеты «разговаривают», визуализируя значения блоков или сохраняя данные для анализа.
Обмен личностью.
Узнайте, как изменение личности кублета меняет его поведение.
Блочное кодирование.
Создавайте новые модели поведения Cubelet с помощью программирования с помощью перетаскивания.
Кодирование С.
Создавайте новые программы Cubelets с помощью текстового кодирования.
Любим педагогами от Вермонта до Вьетнама.
Людей, которые любят Cubelets, можно найти везде, от лагерей до музеев, мастерских, классных комнат и жилых комнат. Кублеты — надежные помощники везде, где происходит обучение.
Cubelets доступны практически каждому и достаточно универсальны, чтобы преподавать больше, чем STEM, что делает их идеальным инструментом для вовлечения каждого учащегося и работы в команде.
Вам не нужно верить нам на слово, узнайте больше от педагогов, которые полагаются на Cubelets в классе.
Влияние Cubelets на моих учеников постоянно превосходит мои ожидания. Я хочу создать равные условия для совместной работы учащихся, расширить концепцию программирования… и вовлечь учащихся, испытывающих затруднения, чтобы сделать обучение веселым и захватывающим. Cubelets помогли со всеми этими целями, и я еще даже не начал царапать поверхность.
Протестированные на более чем 150 000 детей в международных и национальных музеях, Cubelets зарекомендовали себя как любимые посетители, которые знакомят посетителей с простой робототехникой и логическим мышлением. Если добавить к этому отличную поддержку клиентов, предоставление образовательных ресурсов, а также хорошую гарантию на продукт, Cubelets стали одной из наших самых популярных установок в digiPlaySpace.
Поддержка входит в стандартную комплектацию.
Cubelets — это больше, чем удивительные роботизированные блоки — это целая система, разработанная, чтобы помочь вам учить и учиться.
Cubelets поддерживаются:
- Бесплатные уроки, соответствующие стандартам
- Бесплатные мероприятия
- Профессиональное развитие
- Надежная гарантия
- Полезные варианты поддержки
9000 Комплект планов уроков Cubelets.
Изучите образовательные ресурсы или ознакомьтесь с контрольным списком администратора, чтобы узнать, как вы освоили Cubelets.
Маленькие роботы, большие уроки.
Кублеты учат всему: от проектного мышления до проектирования, совместной работы, сложности, математики и многого другого. С помощью этих обманчиво простых блоков роботов можно исследовать даже передовые идеи, такие как абстрактное моделирование, системное мышление и эмерджентность. Кублеты помогают вам развивать более совершенных мыслителей.
Pre-K – 2
nd Класс
- Основы робототехники.
- Причина и следствие.
- Крупная моторика.
- Говорить и задавать вопросы.

- Сортировка.
- Последовательность действий.
2
й – 5 й Марка
- Вычислительное мышление.
- Критическое мышление.
- Основы дизайна и инженерии.
- Основы работы в сети.
- Навыки сотрудничества.
- Распознавание образов.
5
-й Класс +
- Основы информатики.
- Кодируй умнее.
- Параллельное программирование.
- Системное мышление.
- Основы сложности.
- Дизайнерское мышление.
- Сети.
- Абстракция.
Принципы лучшего мышления.
Кубики — это конструкторы для формирования нового мышления. Они предназначены для тех, кто непредубежден и хочет освоить навыки, необходимые для решения больших проблем. Объяснить, что все это значит, значит объяснить, для чего на самом деле нужны Cubelets.
Кубики — это строительные блоки, из которых можно улучшить мышление, и их конструкция помогает учащимся практиковать принципы лучшего мышления.
Хотите взять Cubelets на тест-драйв?
Мы знаем, что вам понравятся Cubelets; именно поэтому мы с гордостью предлагаем преподавателям бесплатный набор для обзора. Возьмите Cubelets на 10-дневный тест-драйв.
Вопросы?
Мы здесь, чтобы помочь вам получить максимальную отдачу от Cubelets. Отправьте нам сообщение, чтобы начать разговор!
Напишите нам
Нужен более традиционный робот?
Мы тоже их делаем! Познакомьтесь с GoPiGo, роботом Raspberry Pi, который поможет вам продвинуться дальше в области компьютерных наук.
Исследуйте GoPiGo
Кубики для образования — Модульная робототехника
Магазин Кубики для образования.
Наборы педагога для каждого класса, лагеря и музея.
Специально разработанные наборы для поддержки всего класса учащихся, работающих в небольших группах.
Встроенная скидка для преподавателей.
Цены на пакеты для преподавателей уже включают 20% скидку.
Бесплатные онлайн-планы уроков.
Доступ к более чем 40 часам бесплатных планов уроков Cubelets.
Детали упаковки.
Поддерживает шесть студенческих групп.
Восемь Cubelets на студенческую группу.
Совместимость с уроками и занятиями без экрана.
Позволяет создавать базовые роботы.
Тактильное исследование принципов кодирования и вычислительного мышления.
Включает в себя 52 Cubelets.
Включает 24 адаптера для блоков.
В комплекте прочная ванна для хранения.
Включает зарядное устройство для нескольких аккумуляторов.
Детали упаковки.
Поддерживает шесть студенческих групп.
12 кубиков на студенческую группу.
Совместимость с уроками и занятиями без экрана.
Позволяет создавать продвинутые роботы.
Тактильное исследование принципов кодирования и вычислительного мышления.
Включает в себя 78 Cubelets.
Включает 12 переходников для кирпичей.
В комплекте прочная ванна для хранения.
Включает зарядное устройство для нескольких аккумуляторов.
Детали упаковки.
Поддерживает до 6–12 студенческих групп.
До 26 Cubelets на студенческую группу.
Совместимость с уроками и занятиями без экрана.
Позволяет создавать продвинутые роботы.
Тактильное исследование принципов кодирования и вычислительного мышления.
Включает в себя 156 кубиков.
Включает 48 переходников для кирпичей.
В комплекте две прочные емкости для хранения.
Включает в себя два зарядных устройства для нескольких аккумуляторов.
Из-за высокого спроса и нехватки запчастей некоторые позиции временно отсутствуют на складе.
Если вы хотите разместить заказ на покупку, свяжитесь с нами напрямую, чтобы попасть в список ожидания! Если вам нужно что-то быстро, некоторые предметы доступны для заимствования в рамках программы Cubelets Cycle.
Свяжитесь с нами
Предпочитаете брать взаймы, а не покупать?
Попробуйте Cubelets Cycle!
Узнайте больше о Cubelets Cycle, новом простом способе заимствования и обучения с помощью блоков роботов Cubelets.
При заказе от $50 доставка по США бесплатная.
Применяется только к внутренним заказам в США.
Полная годовая гарантия.
Кубики крепкие. Но на всякий случай, если вам это нужно, мы здесь.
Преподавательские наборы для учебных станций и индивидуальных ресурсов.
Детали набора.
Пять кубиков в наборе.
Позволяет создавать базовые роботы.
Изучите принципы кодирования и вычислительное мышление.
Включает в себя одну шляпу Bluetooth.
Включает в себя два адаптера Brick.
Детали набора.
10 кубиков в наборе.
Позволяет создавать продвинутые роботы.
Изучите принципы кодирования и вычислительное мышление.
Включает в себя одну шляпу Bluetooth.
Включает в себя два адаптера Brick

Детали упаковки.
19 кубиков в упаковке.
Позволяет создавать продвинутые роботы.
Изучите принципы кодирования и вычислительное мышление.
Включает четыре адаптера Brick
Необходимая помощь в классе, облегчающая жизнь.
Расширяйте свою библиотеку и вводите новые способы строительства.
Дополнительные детали для успеха.
Нужна помощь?
Есть вопросы о Cubelets? Мы здесь, чтобы помочь. Отправьте нам сообщение, чтобы начать.
Напишите нам
Cubelets Руководство по началу работы — модульная робототехника
Десять советов.
Многие пользователи начинают играть с Cubelets без каких-либо инструкций. Они предназначены для этого. Но когда вы будете готовы проявить больше намерений, изучите Руководство по началу работы, чтобы узнать подробности создания дополнительных блоков роботов Cubelets.
Они предназначены для этого. Но когда вы будете готовы проявить больше намерений, изучите Руководство по началу работы, чтобы узнать подробности создания дополнительных блоков роботов Cubelets.
Воспроизвести видео
Содержание.
Содержание
Загрузите бесплатное руководство по Cubelets в формате PDF, которое можно использовать в классе, лагере или на рабочем месте.
Скачать руководство
01
Создайте своего первого робота.
Димбот — использует прозрачный блок действия фонарика, черный блок определения расстояния и голубовато-серый блок батареи. Неважно, где вы поместите аккумуляторный блок. Когда вы объединяете блок «Батарея», блок «Чувство расстояния» и блок «Действие фонарика», загорается блок «Действие фонарика». Вы управляете его яркостью, перемещая руку или предмет ближе или дальше от «глаз» на черном блоке «Расстояние». Свет этого робота тускнеет, когда вы убираете руку, так что вы можете назвать его Димботом.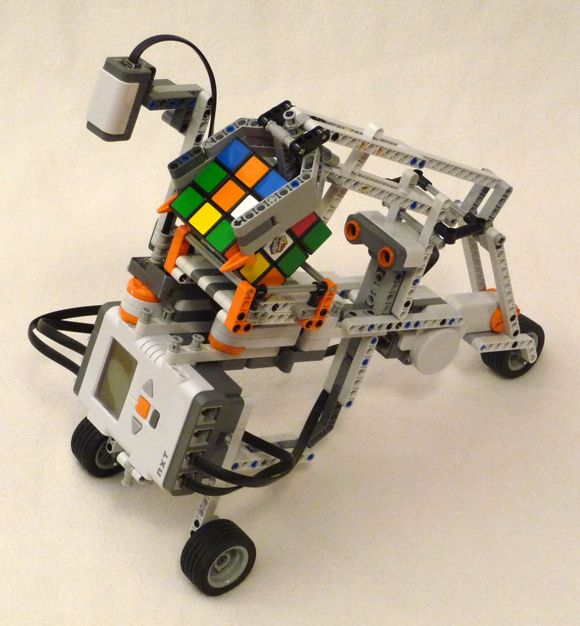
02
Понимание ваших кублетов.
Кублеты бывают трех типов: блоки смысла, блоки действия и блоки мышления. Блоки чувств окрашены в черный цвет, блоки действий — в прозрачные, а блоки мышления — в разные цвета. Большинство кублетов имеют пять соединительных граней и одну специальную грань, которая определяет функцию этого кублета. Другие имеют шесть соединительных поверхностей, и их функция обозначена цветом. Каждый Cubelet имеет небольшой светодиод в одном углу. Когда Cubelet является частью робота и блок питания робота включен, светодиодный индикатор также горит. Светодиодный индикатор показывает, что Cubelet получает питание и разговаривает со своими соседями. Каждый робот Cubelet должен иметь один аккумуляторный блок, который питает все остальные блоки робота. Блок батареи имеет небольшой переключатель. Когда вы сдвинете его в положение «O», блок батареи отключится. Перейдите к строке «|», и она включена. Выключите его, чтобы сэкономить заряд батареи, когда вы не играете со своими Cubelets. Батарейный блок имеет внутреннюю перезаряжаемую батарею. Чтобы зарядить аккумуляторный блок, подключите его к источнику питания micro-USB. Каждая соединительная грань Cubelet имеет три проводника. Внешнее кольцо и магниты проводят землю; внутреннее металлическое кольцо проводит ток; а центральный контакт передает данные от одного Cubelet к другому. Эти три проводника должны соединиться со своими соседними аналогами, чтобы два Cubelet могли обмениваться данными.
Батарейный блок имеет внутреннюю перезаряжаемую батарею. Чтобы зарядить аккумуляторный блок, подключите его к источнику питания micro-USB. Каждая соединительная грань Cubelet имеет три проводника. Внешнее кольцо и магниты проводят землю; внутреннее металлическое кольцо проводит ток; а центральный контакт передает данные от одного Cubelet к другому. Эти три проводника должны соединиться со своими соседними аналогами, чтобы два Cubelet могли обмениваться данными.
03
Что такое робот?
Робот — это машина, которая ощущает свое окружение и воздействует на него. Каждому роботу нужен блок Sense, Action и Battery. Блоки Sense черные, а блоки Action пустые. Каждому роботу нужна энергия. Серо-голубой блок — это блок батареи. Батарейный блок имеет выключатель. Убедитесь, что он включен, прежде чем начать играть; выключите его, когда закончите. Чтобы построить робота, вам понадобится серый блок, черный блок и прозрачный блок. Просто соедините их вместе, и вы построили робота!
04
Замена блоков Sense.
Теперь достаньте блок определения расстояния Димбота. Поместите блок «Чувство яркости» на его место. У вас по-прежнему есть робот-фонарик, но теперь его яркость зависит от света вокруг него. Протестируйте: закройте блок управления яркостью рукой, и фонарик потускнеет. Уберите руку, и фонарик станет ярче. Эти кубы являются модульными, что означает, что вы можете заменить любой блок Sense на любой другой блок Sense. У вас все еще будет робот, просто другой робот. В Димботе мы заменили блок Чувства расстояния на блок Чувства яркости, чтобы сделать Димбота чувствительным к свету.
05
Блоки Swap Act.
Этот простой робот-робот имеет блок управления движением (слева), который перемещает робота, когда его блок определения яркости видит свет. Серый блок справа — это блок батареи. Вы также можете поменять местами блоки действий. С помощью светочувствительного димбота теперь поместите блок действия вождения вместо блока действия фонарика. Теперь у вашего робота есть «Чувство яркости» и блок «Движение» (и, конечно же, блок «Аккумулятор»). Этот робот движется, когда чувствует свет. В светлой комнате это быстрый робот. В темной комнате это Slowbot.
Этот робот движется, когда чувствует свет. В светлой комнате это быстрый робот. В темной комнате это Slowbot.
Попробуйте еще раз подкачать. Что, если вы используете блок Speaker Action вместо блока Drive Action? Вы получаете Canarybot. Как насчет блока «Чувство расстояния» вместо блока «Чувство яркости»? Вы получаете Fraidybot или Friendlybot в зависимости от того, как расположены колеса. Повернув блок Drive Action так, чтобы робот двигался назад, а не вперед, вы получите Friendlybot или Fraidybot.
06
Как текут числа.
Стрелка показывает поток числа от блока «Чувство яркости» к блоку «Действие фонарика».
Каждый черный блок Sense ощущает какое-то свойство своего окружения и превращает его в число. Каждый блок Sense сообщает свой номер всем своим соседям. Вы можете видеть, как они «разговаривают», когда мигают зеленые лампочки на каждом блоке. (Bluetooth мигает разными цветами.) Например, блок Knob Sense определяет, насколько сильно вы поворачиваете ручку. Когда вы поворачиваете ручку до упора против часовой стрелки (влево), блок Knob Sense выдает небольшое число. Поверните его по часовой стрелке вправо, чтобы получить большое число. Блок Brightness Sense определяет, насколько освещена комната. В темном месте блок Brightness Sense выдает небольшое число. В светлом месте блок Brightness Sense выдает большое число. Каждый блок действий берет числа у своих соседей и превращает числа в действие. Блок действия фонарика берет число и зажигает его лампу. Большое число делает лампу яркой. Небольшое число делает лампу тусклой. Думайте о числе как о скачкообразном переходе от одного блока к другому. Числа проходят через блоки робота от блоков Sense к блокам Action все время. Это то, что заставляет робота вести себя так, как он делает. Числа не проходят через блоки Sense. Каждый блок Sense производит свой собственный номер, поэтому он не передает числа от своих соседей.
Когда вы поворачиваете ручку до упора против часовой стрелки (влево), блок Knob Sense выдает небольшое число. Поверните его по часовой стрелке вправо, чтобы получить большое число. Блок Brightness Sense определяет, насколько освещена комната. В темном месте блок Brightness Sense выдает небольшое число. В светлом месте блок Brightness Sense выдает большое число. Каждый блок действий берет числа у своих соседей и превращает числа в действие. Блок действия фонарика берет число и зажигает его лампу. Большое число делает лампу яркой. Небольшое число делает лампу тусклой. Думайте о числе как о скачкообразном переходе от одного блока к другому. Числа проходят через блоки робота от блоков Sense к блокам Action все время. Это то, что заставляет робота вести себя так, как он делает. Числа не проходят через блоки Sense. Каждый блок Sense производит свой собственный номер, поэтому он не передает числа от своих соседей.
07
Использование Cubelet гистограммы для просмотра чисел.
Вы можете использовать блок Bar Graph Action, чтобы понять, что происходит внутри вашего робота, чтобы показать числа, перетекающие из блока в блок. Прикрепите блок Bar Graph Action к любому блоку в роботе. Блок Bar Graph Action показывает, насколько велико число. Если число большое, все ячейки гистограммы подсвечиваются. Если число маленькое, загораются только несколько. Если число очень маленькое (или равно нулю), ячейки вообще не светятся. Попытайся. Создайте простой гобот яркости с блоком «Чувство яркости» и блоком «Движение». Присоедините блок Bar Graph Action к одному из блоков. Если света много, блок Bar Graph Action будет показывать полную полосу (и блок Drive Action будет двигаться быстро). Если света мало, блок Bar Graph Action не будет сильно светиться. Вам не нужен блок Bar Graph Action, чтобы понять, что происходит с этим простым роботом. Но с более крупными и сложными роботами может помочь блок Bar Graph Action.
Прикрепите блок Bar Graph Action к любому блоку в роботе. Блок Bar Graph Action показывает, насколько велико число. Если число большое, все ячейки гистограммы подсвечиваются. Если число маленькое, загораются только несколько. Если число очень маленькое (или равно нулю), ячейки вообще не светятся. Попытайся. Создайте простой гобот яркости с блоком «Чувство яркости» и блоком «Движение». Присоедините блок Bar Graph Action к одному из блоков. Если света много, блок Bar Graph Action будет показывать полную полосу (и блок Drive Action будет двигаться быстро). Если света мало, блок Bar Graph Action не будет сильно светиться. Вам не нужен блок Bar Graph Action, чтобы понять, что происходит с этим простым роботом. Но с более крупными и сложными роботами может помочь блок Bar Graph Action.
08
Расположение кубиков имеет значение.
Изображенные роботы имеют разные версии, потому что вы можете по-разному поместить блок Drive Action в робота. В одну сторону робот идет прямо. С другой стороны, робот ходит по кругу — его можно назвать Turnabot. Дело не только в том, какие блоки датчиков и действий вы выбираете. Это также то, как вы позиционируете и размещаете кублеты. Одни и те же кублеты, расположенные в разной физической конфигурации, образуют разных роботов.
С другой стороны, робот ходит по кругу — его можно назвать Turnabot. Дело не только в том, какие блоки датчиков и действий вы выбираете. Это также то, как вы позиционируете и размещаете кублеты. Одни и те же кублеты, расположенные в разной физической конфигурации, образуют разных роботов.
Например, создайте робота и поместите блок «Чувство яркости» так, чтобы его датчик был направлен вниз. Теперь он не видит света. Этот гобот — ногобот. Какой бы светлой ни была комната, робот не пойдет. Его блок Brightness Sense не воспринимает свет. Попробуйте расположить блок «Чувство яркости» лицом в разные стороны. Как это влияет на поведение робота?
09
Стабильность.
Некоторые роботы более стабильны, чем другие. У всех этих роботов есть блок «Чувство расстояния» и блок «Движение», но различия в их сборке приводят к разному поведению. Попробуйте создать простого гобота с блоком Distance Sense и блоком Drive Action. Это устойчиво, если вы строите поезд со всеми тремя блоками (блок батареи, блок движения и блок определения расстояния), расположенными в ряд. Блок Distance Sense выдает большое число, когда что-то приближается к нему. Вы можете преследовать этого Fraidybot рукой. Когда вы приближаетесь к Fraidybot, он убегает.
Блок Distance Sense выдает большое число, когда что-то приближается к нему. Вы можете преследовать этого Fraidybot рукой. Когда вы приближаетесь к Fraidybot, он убегает.
Если вы построите этого робота как башню вместо поезда, он все равно будет работать, но уже не стабильно: подойдите к блоку Distance Sense, и блок Drive Action начнет двигаться. Ускорьтесь слишком быстро, и башня упадет. Это можно исправить: добавьте блок внизу рядом с блоком Drive Action. Подойдет любой блок, но попробуйте один из зеленых блоков, пассивный блок или блокирующий блок.
Обратите внимание, что вы можете построить этого гобота по-разному. Если блок Distance Sense направлен в том же направлении, что и блок Drive Action, ваш робот приближается к вашей руке. Если вы повернете датчик расстояния в противоположном направлении, он уйдет. Вы можете гонять его рукой или менять направление колес в блоке управления движением.
10
Sense может управлять несколькими блоками действий.
Вы можете использовать один блок Sense для управления одним или несколькими блоками Action. Соберите Lighthousebot, который использует блок Knob Sense для управления скоростью и яркостью вращающейся башни роботов. Lighthousebot использует блок Knob Sense для управления скоростью блока действия Rotate и яркостью блока действия фонарика.
Соберите Lighthousebot, который использует блок Knob Sense для управления скоростью и яркостью вращающейся башни роботов. Lighthousebot использует блок Knob Sense для управления скоростью блока действия Rotate и яркостью блока действия фонарика.
Создайте простого гобота с блоком «Чувство яркости» и блоком «Движение». Он движется, когда чувствует свет. Добавьте блок действия динамика. Теперь он идет и чирикает, когда чувствует свет. Добавьте блок действия с фонариком. Теперь он ходит, чирикает и загорается, когда чувствует свет. Добавьте все блоки действий, которые вы хотите. Все они реагируют на один и тот же блок Brightness Sense. При большом количестве света на блоке «Чувство яркости» все блоки «Действие» будут активно действовать. Без света на блоке «Чувство яркости» блоки «Действие» мало что сделают.
11
Блоки мышления.
Вы познакомились с блоком Battery, черными блоками Sense и прозрачными блоками Action. Пришло время познакомиться с цветными блоками Think. Думайте, что блоки — это цветные блоки. Поскольку роботы — это машины, которые сначала чувствуют, а затем думают, а затем действуют, мы должны быть уверены, что блоки «Мысль» размещены между блоком «Чувство» и блоком «Действие», на который вы хотите воздействовать. В дополнение к зеленому пассивному блоку самым простым блоком мышления является красный блок обратного мышления.
Думайте, что блоки — это цветные блоки. Поскольку роботы — это машины, которые сначала чувствуют, а затем думают, а затем действуют, мы должны быть уверены, что блоки «Мысль» размещены между блоком «Чувство» и блоком «Действие», на который вы хотите воздействовать. В дополнение к зеленому пассивному блоку самым простым блоком мышления является красный блок обратного мышления.
12
Инверсный блок.
Чтобы ночной робот загорался, когда он находится в темном месте, вам нужен блок Red Inverse. Упс! Этот робот, как показано на рисунке, неправильный. Вы можете понять, почему? Вернемся к светочувствительному Димботу. Он имеет блок «Чувство яркости» и блок «Действие фонарика». (Конечно, у него также есть аккумуляторный блок, но мы не будем упоминать аккумуляторный блок, потому что он есть у каждого робота.) Димбот сделал дурацкий фонарик. Его лампа яркая, когда он находится в ярко освещенной комнате, и темная, когда он находится в темной комнате. Мы бы предпочли робота-фонарика, который включается, когда темно, и выключается, когда светло. Вот почему нам нужен красный блок Inverse Think.
Вот почему нам нужен красный блок Inverse Think.
Поместите красный инверсный блок между блоком «Чувство яркости» и блоком «Действие фонарика». Помните историю с числовым потоком: каждый блок Sense производит число. Блок Brightness Sense выдает большое число, когда обнаруживает много света. Он сообщает это большое число своему соседу (блоку действия фонарика), который превращает большое число в яркий свет. Блок «Обратное мышление» превращает большое число в маленькое число (и малое число в большое число). Когда мы помещаем в робота блок Inverse Think, через него проходят числа от блока Sense к блоку Action. Когда блок «Чувство яркости» воспринимает много света, он выдает большое число, которое блок «Обратное мышление» превращает в небольшое число и передает блоку «Действие фонарика», который затемняет свою лампу.
Это работает и в обратную сторону. Когда вы помещаете робота в темную комнату (или затеняете его рукой), блок «Чувство яркости» выдает небольшое число. Блок «Обратное мышление» превращает его в большое число, а блок «Действие фонарика» делает его свет ярким: ночной робот, который включается в темной комнате и выключается в ярко освещенной комнате.
Поменяйте местами блок действия фонарика и поставьте на его место блок действия привода. Итак, вы построили робота, который едет, когда темно, и останавливается, когда светло. Блок Inverse Think в этом Night-Gobot инвертирует число из блока Brightness Sense перед передачей его в блок Drive Action. При слабом освещении блок Brightness Sense выдает небольшое число; блок Inverse Think инвертирует его в большое число, что ускоряет работу блока Drive Action. При ярком свете блок «Ощущение яркости» выдает большое число, которое блок «Обратное мышление» инвертирует в небольшое число, поэтому блок «Действие привода» движется медленно или вообще не движется.
13
Дифференциальный привод.
Поместите двух гоботов вместе на робота (лицом в одну сторону), и вы создадите Steeringbot. Steeringbot имеет две башни гоботов с аккумуляторным блоком между ними. Каждая башня гоботов реагирует на близлежащие объекты. Поместите руку рядом с правой башней гобота, и его блок «Движение» сработает, в то время как блок «Движение» с левой стороны останется неподвижным (или будет двигаться медленнее). Когда один блок Drive Action движется, а другой нет или поворачивается в другую сторону, Steeringbot поворачивается. Это называется «дифференциальное рулевое управление».
Когда один блок Drive Action движется, а другой нет или поворачивается в другую сторону, Steeringbot поворачивается. Это называется «дифференциальное рулевое управление».
14
Блоки действий усредняют свои входные данные.
Если у вашего робота два блока Sense и один блок Action, какой из них управляет роботом? Создайте Testbot с двумя блоками Distance Sense и блоком Bar Graph Action между ними. Блок Bar Graph Action показывает низкое значение, если ни один из блоков Distance Sense не обнаруживает объект. Положите одну руку перед каждым блоком Distance Sense. Они оба будут производить большое число. Блок Bar Graph Action показывает большое число.
Теперь поместите руку перед одним из блоков Чувства Расстояния. Этот блок теперь выдает большое число, в то время как другой блок Distance Sense выдает меньшее число. Блок Bar Graph Action берет оба числа и усредняет их. Он показывает число, которое находится посередине между числами, которые он получает от двух своих соседей по дистанционному чувству.
15
Градиенты – диффузия.
Этот робот показывает историю градиента. Блок Bar Graph Action прикреплен к одному из двух пассивных блоков между двумя блоками Distance Sense, по одному на каждом конце робота. Более близкий блок Distance Sense оказывает большее влияние на блок Bar Graph Action. Если у вашего робота есть блок «Действие» прямо между двумя блоками «Чувство», блок «Действие» усредняет числа, сообщаемые ему двумя блоками «Чувство». Если один блок Sense находится дальше от блока Action, чем другой, то более близкий блок имеет более сильный эффект. Вы можете проверить это, используя блок Bar Graph. Соберите робота с двумя блоками определения расстояния на каждом конце и двумя пассивными блоками между ними. Добавьте блок Bar Graph Action в один из пассивных блоков.
Теперь поиграйте со своим роботом: поместите одну руку перед каждым блоком определения расстояния, чтобы блок действия гистограммы отображался высоко (все его ячейки светились). Уберите руку от блока Distance Sense, который находится дальше от блока Bar Graph Action. Теперь верните руку обратно и попробуйте другой блок Distance Sense. Блок Bar Graph Action сильнее реагирует на более близкий блок Distance Sense. Блок действий действует в соответствии со средним числом полученных им блоков Sense, взвешенных по пройденным расстояниям (количество блоков от блока Sense до блока Action, или «количество прыжков»).
Теперь верните руку обратно и попробуйте другой блок Distance Sense. Блок Bar Graph Action сильнее реагирует на более близкий блок Distance Sense. Блок действий действует в соответствии со средним числом полученных им блоков Sense, взвешенных по пройденным расстояниям (количество блоков от блока Sense до блока Action, или «количество прыжков»).
16
Используйте блок минимума в качестве переключателя.
Предположим, вы хотите сделать светочувствительного гобота — он уходит, когда видит свет. Но вы также хотите иметь возможность отключить его. Конечно, вы можете просто выключить аккумулятор или вынуть аккумуляторный блок. Но вы также можете использовать Cubelets для включения-выключения. Вот как. Обычный светочувствительный гобот имеет всего два блока: блок восприятия яркости и блок действия привода (плюс блок батареи). Число из блока «Чувство яркости» сообщает блоку «Действие привода», как быстро двигаться. Более яркий свет, большее число, более быстрый робот.
Выньте блок «Чувство яркости» и поставьте на его место блок «Минимальное мышление». Этот блок «Минимальное мышление» сообщит блоку «Действие вождения», насколько быстро нужно двигаться. Он возьмет все числа, которые ему дают его соседи по блоку Sense, и выберет наименьшее (минимальное) из этих чисел. Это наименьшее число — это то, что он передаст своим соседям по блоку действий.
Присоедините блок «Чувство яркости» к блоку «Минимальное мышление», а также прикрепите блок «Чувство ручки». Теперь, если вы повернете блок Knob Sense до упора против часовой стрелки (влево), то блок Minimum Think сообщит блоку Drive Action «ноль», потому что это меньшее число, которое он получает. Если вы повернете блок Knob Sense до упора по часовой стрелке (вправо), то блок Minimum Think сообщит блоку Drive Action любое число, которое он получает от блока Brightness Sense. С блоком Minimum Think блок Knob Sense действует как выключатель.
17
Используйте Блокирующий блок, чтобы разделить две части робота.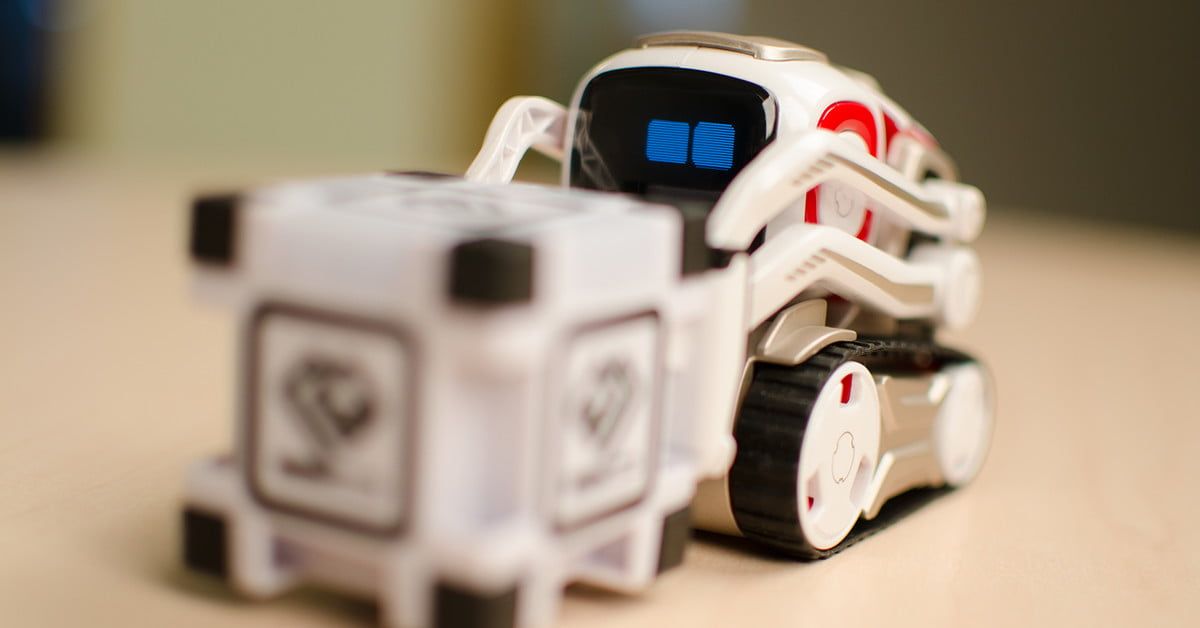
Темно-зеленый блок Blocker Think пропускает энергию, но не позволяет числам проходить через него. Используйте его, чтобы построить робота из двух частей, которые не разговаривают друг с другом. Вот пример. Одна половина робота — Lighthousebot с вращающимся светом; другая половина — робот, который чирикает, когда видит свет от робота-маяка. Lighthousebot — это блок Knob Sense, который контролирует скорость блока действия Rotate, а также блок действия фонарика, который направлен наружу (вбок). Когда вы поворачиваете Knob Sense по часовой стрелке (вправо), свет загорается и начинает вращаться.
Теперь добавим на базу (скажем, на Батарею) блок Блокировщик. Затем с другой стороны блока Blocker добавьте блок Speaker Action, а сверху поместите блок Brightness Sense так, чтобы его поверхность сенсора была направлена на вращающийся источник света. Блок Speaker Action чирикает (если в комнате светло). Справа от зеленого блока Blocker находится мини-маяк: блок Knob Sense, блок действия Rotate и блок действия фонарика. Блок Flashlight Action вращается, когда вы включаете блок Knob Sense. . Когда свет от вращающегося блока «Фонарик» попадает на блок «Чувство яркости», блок «Действие динамика» отвечает более быстрым щебетанием.
Блок Flashlight Action вращается, когда вы включаете блок Knob Sense. . Когда свет от вращающегося блока «Фонарик» попадает на блок «Чувство яркости», блок «Действие динамика» отвечает более быстрым щебетанием.
18
Использование порога.
Блок Threshold Cubelet представляет собой блок Think с регулируемой ручкой. В отличие от большинства Think Cubelets, Threshold позволяет вам изменять его эффект внутри робота. Пороговый кублет действует как изолятор или блокиратор чисел ниже значения, установленного ручкой порога. Числа выше установленного порогового значения будут продолжать передаваться от блока к блоку.
Соберите тестового робота с батареей, гистограммой и датчиком расстояния. Чем ближе объект к датчику расстояния, тем выше значение, отображаемое на гистограмме Cubelet. Теперь поместите пороговый кублет между датчиком расстояния и гистограммой. Установите пороговое значение на самое низкое значение. Вы заметите, что Threshold Cubelet, кажется, не имеет никакого эффекта.