Содержание
История роботов — HiSoUR История культуры
История роботов берет свое начало в древнем мире. Современная концепция начала развиваться с наступлением промышленной революции, что позволило использовать сложную механику и последующее введение электричества. Это дало возможность силовым машинам с небольшими компактными двигателями. В начале 20-го века было разработано понятие гуманоидной машины. Сегодня можно предусмотреть роботов размером с человека, способных к почти человеческим мыслям и движениям.
Первые применения современных роботов были на фабриках в качестве промышленных роботов — простых стационарных машин, способных создавать задачи, которые позволяли производить продукцию с меньшей потребностью в человеческом содействии. С 2000-х годов были построены промышленные роботы и роботы с искусственным интеллектом.
Ранние легенды
Понятия искусных слуг и спутников датируются, по крайней мере, еще древними легендами Кадма, которые, как говорят, посеяли зубы дракона, которые превратились в солдат и Пигмалион, чья статуя Галатеи ожила. Многие древние мифологии включали в себя искусственных людей, таких как говорящие механические служанки, построенные греческим богом Гефестом (Вулкан для римлян) из золота, глиняные големы еврейской легенды и глиняные гиганты норвежской легенды.
Многие древние мифологии включали в себя искусственных людей, таких как говорящие механические служанки, построенные греческим богом Гефестом (Вулкан для римлян) из золота, глиняные големы еврейской легенды и глиняные гиганты норвежской легенды.
В греческой мифологии Гефест создал утилитарные трехногие столы, которые могли передвигаться под их собственной властью, и бронзовый человек, Талос, который защищал Крит. Талос был в конечном счете разрушен Медеей, который забросил молнию в единственном ключе свинца. Чтобы взять золотое руно, Джейсону также пришлось приручить двух огнедышащих быков с бронзовыми копытами; и, подобно Кадмусу, он сеял зубы дракона в солдат.
Индийский Локапаннатти (11-12 вв.) Рассказывает историю короля Аджаташатру Магадхи, который собрал мощи Будды и спрятал их в подземной ступе. Реликвии охраняли механические роботы (бхута вахана йанта), из королевства Римская вияя, пока они не были разоружены королем Ашокой. В египетской легенде о Роаиле младший брат Сета создал дворец и гробницу с автономными статуями, которые так реалистично воплощали жизни людей, что они ошибались за то, что были души.
Вдохновленные европейской христианской легендой средневековые европейцы разработали наглые головы, которые могли бы ответить на поставленные перед ними вопросы. Предполагалось, что Альбертус Магнус построил целый андроид, который мог бы выполнять некоторые домашние задания, но он был разрушен учеником Альберта Фома Аквинским для того, чтобы помешать его мысли. Самая известная легенда касалась бронзовой головы, разработанной Роджером Бэконом, которая была уничтожена или сломана после того, как он пропустил свой момент операции. Автоматы, похожие на людей или животных, были популярны в воображаемых мирах средневековой литературы.
Automata
Механические автоматы были построены в 10 веке до н.э. в Западной династии Чжоу. Мастер Ян Ши сделал гуманоидные автоматы, которые могли петь и танцевать. Говорят, что машина обладала живыми органами, такими как кости, мышцы и суставы. Космический двигатель, 10-метровая (33 фута) башня с часами, построенная Су Сонгом в Кайфэне, Китай, в 1088 году, отличалась механическими манекенами, которые звонили в часы, звонящие гонги или колокола среди других устройств. Фанта автоматизации продолжались в династию Тан. Дайфэн Ма построил автоматизированного гардероба для королевы. Ying Wenliang создал автомата, который предложил тосты на банкетах и деревянные женские автоматы, которые играли в шэн. Среди лучших задокументированных автоматов древнего Китая — Хань Жиля, японца, который переехал в Китай в начале IX века до нашей эры.
Фанта автоматизации продолжались в династию Тан. Дайфэн Ма построил автоматизированного гардероба для королевы. Ying Wenliang создал автомата, который предложил тосты на банкетах и деревянные женские автоматы, которые играли в шэн. Среди лучших задокументированных автоматов древнего Китая — Хань Жиля, японца, который переехал в Китай в начале IX века до нашей эры.
В 4-ом столетии до н.э. математик Archytas Tarentum постулировал механическую птицу, которую он назвал «Голубь», которая была вытеснена паром. Еще одним ранним автоматом была клепсидра, сделанная в 250 году до н.э. Ктесибием Александрийским, физиком и изобретателем из Птолемеевского Египта. Герой Александрийского (10-70 н.э.) сделал множество новшеств в области автоматов, в том числе тот, который якобы мог говорить. Взяв прежнюю ссылку в «Илиаде» Гомера, Аристотель предположил в своей Политике (около 322 г. до н.э., книга 1, часть 4), что автоматы могут когда-нибудь привести к равенству людей, сделав возможным отмену рабства:
Есть только одно условие, в котором мы можем представить себе менеджеров, которым не нужны подчиненные, а хозяевам не нужны рабы. Это условие состояло бы в том, что каждый инструмент мог бы выполнять свою собственную работу, по слову командования или интеллектуальному ожиданию, например, статуи Дедала или штативы, сделанные Гефестом, о которых Гомер говорит, что «по собственному желанию они вошли в конклав Боги на Олимпе «, как будто шаттл должен плетуться сам по себе, а плектрум следует играть в свою собственную арфу.
Это условие состояло бы в том, что каждый инструмент мог бы выполнять свою собственную работу, по слову командования или интеллектуальному ожиданию, например, статуи Дедала или штативы, сделанные Гефестом, о которых Гомер говорит, что «по собственному желанию они вошли в конклав Боги на Олимпе «, как будто шаттл должен плетуться сам по себе, а плектрум следует играть в свою собственную арфу.
Аль-Джазари (1136-1206), мусульманский изобретатель во времена династии Артукид, спроектировал и построил ряд автоматов, включая кухонные приборы и музыкальные автоматы, работающие на воде. Один особенно сложный автомат включал четырех автоматических музыкантов, которые плавали на озере.
Работы героев на автоматах были переведены на латынь в эпоху Возрождения 12-го века. Художник-инженер 13-го века Вильяр де Хоннекур набросал планы для нескольких автоматов. В конце XIII века Роберт II, граф Артуа, построил в своем замке в Хесдине сад с удовольствием, в который вошли несколько роботов, гуманоидов и животных.
Среди первой проверяемой автоматизации — гуманоид, нарисованный Леонардо да Винчи (1452-1519) примерно в 1495 году. Ноутбуки Леонардо, заново открытые в 1950-х годах, содержат подробные рисунки механического рыцаря в доспехах, который смог сесть, размахивать руками и двигать головой и челюстью. В 1533 году Йоханнес Мюллер фон Кенигсберг создал автомат-орла и летал из железа; оба могли летать. Джон Ди также известен тем, что создал деревянного жука, способного летать.
17-летний мыслитель Рене Декарт считал, что животные и люди являются биологическими машинами. Во время своей последней поездки в Норвегию он взял с собой механическую куклу, похожую на его мертвую дочь Франсин. В 18 веке мастер игрушек Jaques de Vaucanson построил для Людовика XV автоматическую утку с сотнями движущихся частей, которые могли есть и пить. Впоследствии Ваукансон построил гуманоидные автоматы, барабанщик и игрок в битве были отмечены за их анатомическое сходство с реальными людьми. Создание Vaucanson вдохновило европейских часовщиков на производство механических автоматов, и стало модным среди европейской аристократии собирать сложные механические устройства для развлечений. В 1770-х годах швейцарский Пьер Яке-Дроз создал движущиеся автоматы, которые выглядели как дети, которые восхищали Мэри Шелли, которая продолжила писать Франкенштейна: «Современный Прометей». Конечной попыткой автоматизации стал «Турок» Вольфганга фон Кемпелена, сложная машина, которая могла играть в шахматы против человеческого противника и гастролировала по Европе. Когда машина была принесена в новый мир, это побудило Эдгара Аллана По подготовить эссе, в котором он пришел к выводу, что механические устройства невозможно рассуждать или думать.
В 1770-х годах швейцарский Пьер Яке-Дроз создал движущиеся автоматы, которые выглядели как дети, которые восхищали Мэри Шелли, которая продолжила писать Франкенштейна: «Современный Прометей». Конечной попыткой автоматизации стал «Турок» Вольфганга фон Кемпелена, сложная машина, которая могла играть в шахматы против человеческого противника и гастролировала по Европе. Когда машина была принесена в новый мир, это побудило Эдгара Аллана По подготовить эссе, в котором он пришел к выводу, что механические устройства невозможно рассуждать или думать.
Японский мастер Хисашиг Танака, известный как «Эдисон в Японии», создал множество чрезвычайно сложных механических игрушек, некоторые из которых могли служить чаю, стрелы стрельбы, извлеченные из колчана, или даже рисовать характер японского кандзи. Знаменитый текст Каракури Зуи (Иллюстрированное оборудование) был опубликован в 1796 году.
Современная история
1900-х годов
В книге «Чудный Волшебник Оз» роботы назывались «механическими людьми».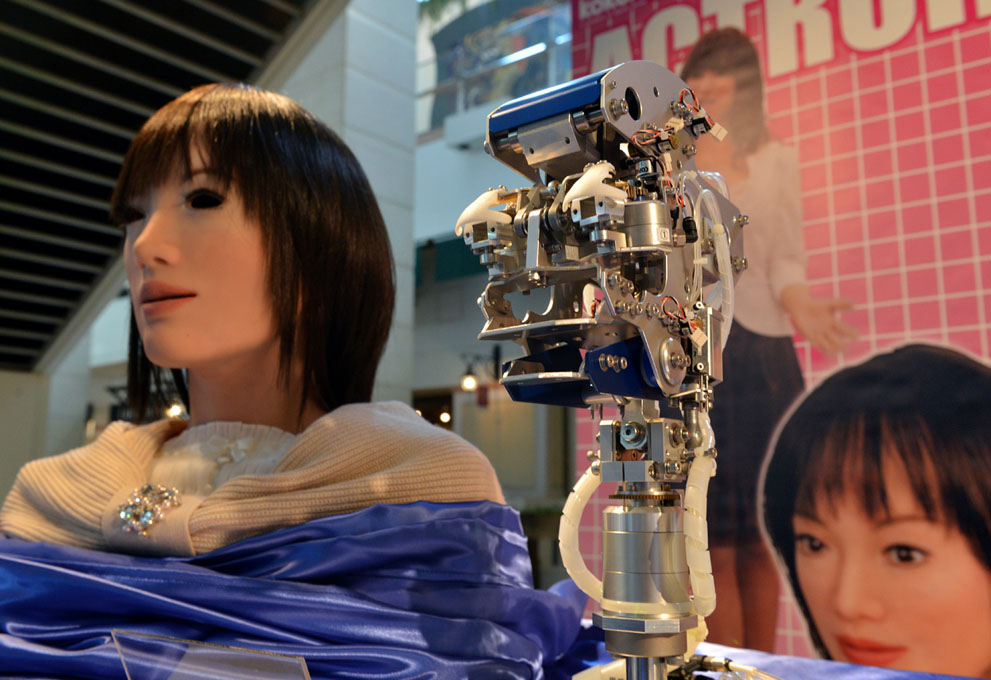 Примечательным персонажем был оловянный Вудман, человек из олова, который рубил деревья в лесах Оз.
Примечательным персонажем был оловянный Вудман, человек из олова, который рубил деревья в лесах Оз.
1910-х годов
Первым человекоподобным роботом был солдат с трубой, сделанный в 1910 году Фридрихом Кауфманом в Дрездене, Германия. В Первой мировой войне использовалось оружие дистанционного управления, основанное на работе Никола Тесла, которая построила электрическую лодку, которую можно дистанционно контролировать по радио.
1920-е годы
Термин «робот» был впервые использован в пьесе, опубликованной чешским Карелом Чапеком в 1920 году. Руб (Universal Robots от Rossum) был сатирой, роботы были изготовлены биологическими существами, которые выполняли весь неприятный ручной труд. По словам Чапека, слово было создано его братом Йозефом из чешской роботы, что означает подневольное состояние. Игра «RUR» заменила популярное использование слова «автомат». Тем не менее, до 1950-х годов «робот» был объявлен «робитом» [разъяснением] в фильмах, радио- и телевизионных программах: примерами являются «Одинокий» эпизод сериала «Зона сумерек», впервые транслировавшийся 15 ноября 1959 года, и научно-фантастическая радиопрограмма «Х минус один».
Westinghouse Electric Corporation построила Televox в 1926 году; это был картонный вырез, соединенный с различными устройствами, которые пользователи могли включать и выключать. В 1927 году был выпущен Метрополис Фрица Ланга; Maschinenmensch («машинный человек»), гинеоидный гуманоидный робот, также называемый «Пародия», «Футура», «Роботрикс» или «исполнитель Марии» (в исполнении немецкой актрисы Бриджит Хелм), был первым роботом, когда-либо быть изображен на пленке.
Самые известные японские роботизированные автоматы были представлены общественности в 1927 году. Гакутенсоку, как полагали, имел дипломатическую роль. Приводя сжатый воздух, он мог писать плавно и поднимать веки. Многие роботы были построены до рассвета управляемых компьютером сервомеханизмов, для целей общественных отношений крупных фирм. Это были машины, которые могли выполнять несколько трюков, таких как автоматы 18-го века. В 1928 году один из первых человекоподобных роботов был представлен на ежегодной выставке Общества инженеров-конструкторов в Лондоне. Изобретенный WH Ричардсом, робот — по имени Эрик — состоял из алюминиевого костюма брони с одиннадцатью электромагнитами и одного двигателя, питаемого от источника питания 12 вольт. Робот мог двигать руками и головой и мог управляться дистанционным управлением или голосовым управлением.
Изобретенный WH Ричардсом, робот — по имени Эрик — состоял из алюминиевого костюма брони с одиннадцатью электромагнитами и одного двигателя, питаемого от источника питания 12 вольт. Робот мог двигать руками и головой и мог управляться дистанционным управлением или голосовым управлением.
1930-е годы
В 1939 году робот-гуманоид, известный как «Электро», появился на Всемирной выставке. Семь футов высотой (2,1 м) и весом 265 фунтов (120 кг), он мог ходить по голосовой команде, говорить около 700 слов (используя проигрыватель с 78 оборотами в минуту), курить сигареты, взорвать воздушные шары и двигать головой и руками , Корпус состоял из стальной шестерни и скелета двигателя, покрытых алюминиевой оболочкой.
В 1939 году Конрад Цузе построил первый программируемый электромеханический компьютер, заложив основу для строительства гуманоидной машины, которая теперь считается роботом.
1940-е годы
В 1941 и 1942 годах Исаак Азимов сформулировал три закона робототехники, а в процессе придумал слово «робототехника». В 1945 году Ванневар Буш опубликовал статью «Как мы думаем» — эссе, в котором исследовался потенциал электронной обработки данных. Он предсказал рост компьютеров, цифровых текстовых процессоров, распознавания голоса и машинного перевода. Позднее он был зачислен Тедом Нельсоном, изобретателем гипертекста. В 1948 году Норберт Винер сформулировал принципы кибернетики, основы практической робототехники.
В 1945 году Ванневар Буш опубликовал статью «Как мы думаем» — эссе, в котором исследовался потенциал электронной обработки данных. Он предсказал рост компьютеров, цифровых текстовых процессоров, распознавания голоса и машинного перевода. Позднее он был зачислен Тедом Нельсоном, изобретателем гипертекста. В 1948 году Норберт Винер сформулировал принципы кибернетики, основы практической робототехники.
Первые электронные автономные роботы со сложным поведением были созданы Уильямом Грей Уолтером из Неврологического института Бремена в Бристоле, Англия, в 1948 и 1949 годах. Он хотел доказать, что богатые связи между небольшим количеством клеток мозга могут привести к очень сложному поведению — по сути, секрет того, как работал мозг, заключается в том, как он был подключен. Его первые роботы по имени Элмер и Эльси были построены между 1948 и 1949 годами и часто назывались «черепахами» из-за их формы и медленной скорости движения. Трехколесные роботы-черепахи были способны к фототаксису, благодаря чему они могли найти свой путь к станции подзарядки, когда они бежали от батареи.
Уолтер подчеркивал важность использования чисто аналоговой электроники для моделирования процессов мозга в то время, когда его современники, такие как Алан Тьюринг и Джон фон Нейман, все обращались к мнению психических процессов с точки зрения цифровых вычислений. Работа Уолтера вдохновила последующих поколений исследователей робототехники, таких как Родни Брукс, Ханс Моравец и Марк Тилден. Современные воплощения «черепах» Уолтера можно найти в виде роботов BEAM.
1950-е годы
В 1951 году Уолтер опубликовал статью «Машина», которая учится, документируя, как его более продвинутые механические роботы действовали как интеллектуальный агент, демонстрируя условное рефлекторное обучение. Первый в цифровой форме и программируемый робот был изобретен Джорджем Devol в 1954 году и был назван Unimate. Это позже заложило основы современной индустрии робототехники.
В Японии роботы стали популярными персонажами комиксов. Роботы стали культурными иконами, и японское правительство стимулировало финансирование исследований робототехники. Среди самых знаковых персонажей был Astro Boy, которому обучают человеческие чувства, такие как любовь, мужество и неуверенность в себе. В культурном отношении роботы в Японии стали рассматриваться как помощники своих коллег-гуманитариев.
Среди самых знаковых персонажей был Astro Boy, которому обучают человеческие чувства, такие как любовь, мужество и неуверенность в себе. В культурном отношении роботы в Японии стали рассматриваться как помощники своих коллег-гуманитариев.
1960-е годы
Devol продал первый Unimate General Motors в 1960 году, и он был установлен в 1961 году на заводе в Юинг Тауншип, штат Нью-Джерси, чтобы вытащить горячие куски металла из машины для литья под давлением и поместить их в охлаждающую жидкость. «Без каких-либо фанфар, первый рабочий робот в мире присоединился к сборочной линии на заводе General Motors в Эйвин-Тауншип весной 1961 года. Это была автоматическая пресс-форма для литья под давлением, которая удаляла красные дверные ручки и другие подобные автомобили частей в бассейны охлаждающей жидкости на линии, которые перемещали их вместе с рабочими для обрезки и полировки ». Патент на Devol для первой программируемой роботизированной руки с цифровым управлением представляет собой основу современной индустрии робототехники.
Рука Ранчо была разработана как роботизированная рука для оказания помощи инвалидам в больнице Ранчо Лос-Амигос в Дауни, Калифорния; эта компьютерная рукоятка была куплена Стэнфордским университетом в 1963 году. В 1967 году первый промышленный робот был применен в Японии. Робот Versatran был разработан Американской машиной и литейным цехом. Спустя год компания Kawasaki Heavy Industries начала производство гидравлических роботов от Unimation. В 1968 году Марвин Минский создал «щупальцевую руку»; рука была управляемой компьютером, а ее 12 суставов были оснащены гидравликой. В 1969 году студент-механик Виктор Шейнман создал «Стэнфордский фронт», признанный первым электронным управляемым компьютером роботом (инструкции Юнимата были сохранены на магнитном барабане).
В конце 1960-х годов война во Вьетнаме стала испытательным полигоном для автоматизированных командных технологий и сенсорных сетей. В 1966 году была предложена линия Макнамара с целью практически без наземных сил. Эта сенсорная сеть сейсмических и акустических датчиков, фоторекламы и сработавших с помощью датчиков наземных мин была частично реализована из-за высокой стоимости. Первый мобильный робот, способный рассуждать о своем окружении, Shakey, был построен в 1970 году Стэнфордским исследовательским институтом (ныне SRI International). Shakey объединил несколько входов датчиков, в том числе телевизионные камеры, лазерные дальномеры и «датчики ударных» для навигации.
Первый мобильный робот, способный рассуждать о своем окружении, Shakey, был построен в 1970 году Стэнфордским исследовательским институтом (ныне SRI International). Shakey объединил несколько входов датчиков, в том числе телевизионные камеры, лазерные дальномеры и «датчики ударных» для навигации.
1970-е годы
В начале 1970-х годов были разработаны высокоточные боеприпасы и интеллектуальное оружие. Оружие стало роботизированным путем внедрения терминального руководства. В конце войны во Вьетнаме были развернуты первые бомбы с лазерным наведением, которые могли найти свою цель, следуя лазерному лучу, который был направлен на цель. В течение 1972 года операции Linebacker лазерные бомбы доказали свою эффективность, но все же в значительной степени зависели от человеческих операторов. Оружие «Огонь-и-забыть» было также впервые применено в заключительной войне во Вьетнаме, после чего не было никакого дополнительного внимания или действия от оператора.
Развитие гуманоидных роботов значительно продвинулось японскими учеными-роботами в 1970-х годах. Университет Васеда начал проект WABOT в 1967 году, а в 1972 году закончил WABOT-1, первый в мире полномасштабный гуманоидный интеллектуальный робот. Его система управления конечностями позволяла ему ходить с нижними конечностями, а также захватывать и переносить предметы руками, используя тактильные датчики. Его система зрения позволяла измерять расстояния и направления к объектам с использованием внешних рецепторов, искусственных глаз и ушей. И его система разговора позволила ему общаться с человеком по-японски, с искусственным ртом. Это сделало его первым android.
Университет Васеда начал проект WABOT в 1967 году, а в 1972 году закончил WABOT-1, первый в мире полномасштабный гуманоидный интеллектуальный робот. Его система управления конечностями позволяла ему ходить с нижними конечностями, а также захватывать и переносить предметы руками, используя тактильные датчики. Его система зрения позволяла измерять расстояния и направления к объектам с использованием внешних рецепторов, искусственных глаз и ушей. И его система разговора позволила ему общаться с человеком по-японски, с искусственным ртом. Это сделало его первым android.
Фредди и Фредди II были роботами, построенными в Университете Эдинбургской школы информатики Пэт Амблером, Робин Поплстоун, Остин Тейт и Дональдом Митчи и были способны собирать деревянные блоки в течение нескольких часов. Немецкая компания KUKA построила первый в мире промышленный робот с шестью осями с электромеханическим управлением, известными как FAMULUS.
В 1974 году Дэвид Сильвер разработал «Серебряную руку», которая способствовала тонким движениям, воспроизводящим человеческие руки. Обратная связь была обеспечена датчиками касания и давления и проанализирована компьютером. SCARA, селективный сборщик роботов-роботов, был создан в 1978 году как эффективная 4-осевая роботизированная рука. Лучше всего использовать для сбора деталей и размещения их в другом месте, SCARA был представлен на сборочных линиях в 1981 году.
Обратная связь была обеспечена датчиками касания и давления и проанализирована компьютером. SCARA, селективный сборщик роботов-роботов, был создан в 1978 году как эффективная 4-осевая роботизированная рука. Лучше всего использовать для сбора деталей и размещения их в другом месте, SCARA был представлен на сборочных линиях в 1981 году.
Стэнфордская тележка успешно пересекла комнату, полную стульев в 1979 году. Она ориентировалась в первую очередь на стереовидение для навигации и определения расстояний. Институт робототехники в Университете Карнеги-Меллона был основан в 1979 году Радж Редди.
1980-е годы
В 1981 году Такео Канаде создал первый «прямой привод». Первые в своем роде двигатели рук были встроены в сам робот, исключая длинные передачи.
В 1984 году был обнаружен Вабот-2; способный играть на органе, Вабот-2 имел 10 пальцев и два фута. Wabot-2 смог прочитать музыку и сопровождать человека.
В 1986 году Honda начала свою гуманоидную программу исследований и разработок для создания роботов, способных эффективно взаимодействовать с людьми. Геноподальный робот по имени Чингис был обнаружен MIT в 1989 году. Чингис славился тем, что его быстро и дешево производят благодаря методам строительства; Чингис использовал 4 микропроцессора, 22 датчика и 12 сервомоторов. Родни Брукс и Анита М. Флинн опубликовали «Быстро, дешево и вне контроля: вторжение роботов в солнечную систему». В статье говорилось о том, чтобы увеличить количество более дешевых роботов в большем количестве, чтобы увеличить время производства и уменьшить сложность запуска роботов в космос.
Геноподальный робот по имени Чингис был обнаружен MIT в 1989 году. Чингис славился тем, что его быстро и дешево производят благодаря методам строительства; Чингис использовал 4 микропроцессора, 22 датчика и 12 сервомоторов. Родни Брукс и Анита М. Флинн опубликовали «Быстро, дешево и вне контроля: вторжение роботов в солнечную систему». В статье говорилось о том, чтобы увеличить количество более дешевых роботов в большем количестве, чтобы увеличить время производства и уменьшить сложность запуска роботов в космос.
1990-е годы
В 1994 году FDA выпустила одну из самых успешных роботизированных хирургических аппаратов. Cyberknife был изобретен Джоном Р. Адлером, и первая система была установлена в Стэнфордском университете в 1991 году. Эта система радиохирургии интегрировала операции с изображением с роботизированным позиционированием. Cyberknife теперь используется для лечения пациентов с опухолями головного или спинного мозга. Рентгеновская камера отслеживает смещение и компенсирует движение, вызванное дыханием.
Биомиметический робот RoboTuna был построен доктором-доктором Дэвидом Барреттом в Массачусетском технологическом институте в 1996 году для изучения того, как рыба плавает в воде. RoboTuna предназначен для плавания и напоминания голубого тунца [необходимо иметь значение].
Первый робот-гуманоид Honda P2 был впервые показан в 1996 году. Стоя на «прототипе модели 2», P2 был неотъемлемой частью проекта гуманоидного развития Honda; высотой более 6 футов (1,8 м), Р2 был меньше, чем его предшественники, и, по-видимому, он был более человечноподобным в своих движениях.
Ожидается, что он будет работать только семь дней, и в 1997 году после трехдневного рабочего дня, после 83-дневного периода работы, грузовик Sojourner отключился. Этот небольшой робот (всего 23 фунта или 10,5 кг) выполнил полуавтономные операции на поверхности Марса в рамках миссии Марса-Pathfinder ; оснащенный программой предотвращения препятствий, Соджурнер был способен планировать и проводить маршруты для изучения поверхности планеты. Способность Sojourner перемещаться с небольшими данными об окружающей среде и близлежащем окружении позволила ему реагировать на незапланированные события и объекты.
Способность Sojourner перемещаться с небольшими данными об окружающей среде и близлежащем окружении позволила ему реагировать на незапланированные события и объекты.
Человеческий робот P3 был обнаружен Honda в 1998 году как часть продолжающегося гуманоидного проекта компании. В 1999 году Sony представила AIBO, роботизированную собаку, способную взаимодействовать с людьми; первые выпущенные в Японии модели распроданы за 20 минут. Honda показала самый продвинутый результат своего гуманоидного проекта в 2000 году, названный ASIMO. ASIMO может работать, ходить, общаться с людьми, распознавать лица, окружающую среду, голоса и позы и взаимодействовать с окружающей средой. Sony также продемонстрировала свои роботы Sony Dream Robots, небольшие роботы-гуманоиды в разработке для развлечений. В октябре 2000 года Организация Объединенных Наций подсчитала, что в мире насчитывается 742 500 промышленных роботов, причем более половины из них используется в Японии.
2001-настоящее время
В апреле 2001 года Canadarm2 был запущен на орбиту и прикреплен к Международной космической станции. Canadarm2 — это более крупная, более способная версия оружия, используемого космическим челноком, и считается «умнее». Также в апреле беспилотный летательный аппарат Global Hawk совершил первый автономный беспосадочный полет над Тихим океаном с базы ВВС Эдвардса в Калифорнии до RAAF Base Edinburgh в Южной Австралии. Полет был сделан за 22 часа.
Canadarm2 — это более крупная, более способная версия оружия, используемого космическим челноком, и считается «умнее». Также в апреле беспилотный летательный аппарат Global Hawk совершил первый автономный беспосадочный полет над Тихим океаном с базы ВВС Эдвардса в Калифорнии до RAAF Base Edinburgh в Южной Австралии. Полет был сделан за 22 часа.
Популярный Roomba, роботизированный пылесос, был впервые выпущен в 2002 году компанией iRobot.
В 2005 году Корнельский университет показал робота, способного к саморепликации; набор кубов, способных прикреплять и отсоединять, первый робот, способный создавать копии самого себя. Начиная с 2003 года, 3 и 24 января, Марс-роверс «Дух и возможность» высадился на поверхности Марса. Оба робота ездили во много раз раньше, чем ожидалось, а Opportunity по-прежнему работает с середины 2018 года, хотя сообщения были впоследствии потеряны из-за большой пыльной бури.
Самостоятельные автомобили появились около 2005 года, но было место для улучшения. Ни один из 15 устройств, конкурирующих в DARPA Grand Challenge (2004), успешно завершил курс; на самом деле ни один робот не смог успешно преодолеть более 5% пробега на 150 миль (240 км), оставив призовой приз в размере 1 млн. долларов США невостребованным. В 2005 году Honda представила новую версию своего робота ASIMO, обновленную с новыми поведением и возможностями. В 2006 году Корнельский университет показал своего робота «Starfish», четырехногий робот, способный самостоятельно моделировать [разъяснение] и научиться ходить после того, как был поврежден. В 2007 году TOMY запустил развлекательный робот i-sobot, робот-гуманоид, который может ходить как человек и выполняет удары и удары, а также некоторые увлекательные трюки и специальные действия в разделе «Специальный режим действия».
Ни один из 15 устройств, конкурирующих в DARPA Grand Challenge (2004), успешно завершил курс; на самом деле ни один робот не смог успешно преодолеть более 5% пробега на 150 миль (240 км), оставив призовой приз в размере 1 млн. долларов США невостребованным. В 2005 году Honda представила новую версию своего робота ASIMO, обновленную с новыми поведением и возможностями. В 2006 году Корнельский университет показал своего робота «Starfish», четырехногий робот, способный самостоятельно моделировать [разъяснение] и научиться ходить после того, как был поврежден. В 2007 году TOMY запустил развлекательный робот i-sobot, робот-гуманоид, который может ходить как человек и выполняет удары и удары, а также некоторые увлекательные трюки и специальные действия в разделе «Специальный режим действия».
Robonaut 2, последнее поколение помощников космонавта, был запущен на космическую станцию на борту космического корабля Discovery в миссии STS-133 в 2011 году. Это первый робот-гуманоид в космосе, и хотя его основная задача в настоящее время заключается в обучении инженеров тому, как dextrous роботы ведут себя в космосе; надежда состоит в том, что благодаря модернизации и продвижению она могла бы однажды выйти за пределы станции, чтобы помочь космическим оборачивателям совершить ремонт или добавление на станцию или выполнить научную работу.
25 октября 2017 года на будущем инвестиционном саммите в Эр-Рияде робот по имени София и связанный с женскими местоимениями получил гражданство Саудовской Аравии, став первым роботом, когда-либо имевшим гражданство. Это вызвало споры, поскольку неясно, подразумевает ли это, что София может голосовать или вступать в брак, или намеренное закрытие системы может считаться убийством; а также, что является спорным, учитывая, как мало прав даются саудовским человек женщин.
Коммерческие и промышленные роботы в настоящее время широко используются, выполняя работу дешевле или с большей точностью и надежностью, чем люди. Они также используются для задач, которые являются слишком грязными, опасными или унылыми, чтобы быть пригодными для людей. Роботы широко используются в производстве, сборке и упаковке, транспортировке, разведке Земли и космоса, хирургии, оружии, лабораторных исследованиях и массовом производстве потребительских и промышленных товаров.
С недавними достижениями в области программного обеспечения для компьютерного оборудования и управления данными также широко распространены искусственные представления людей.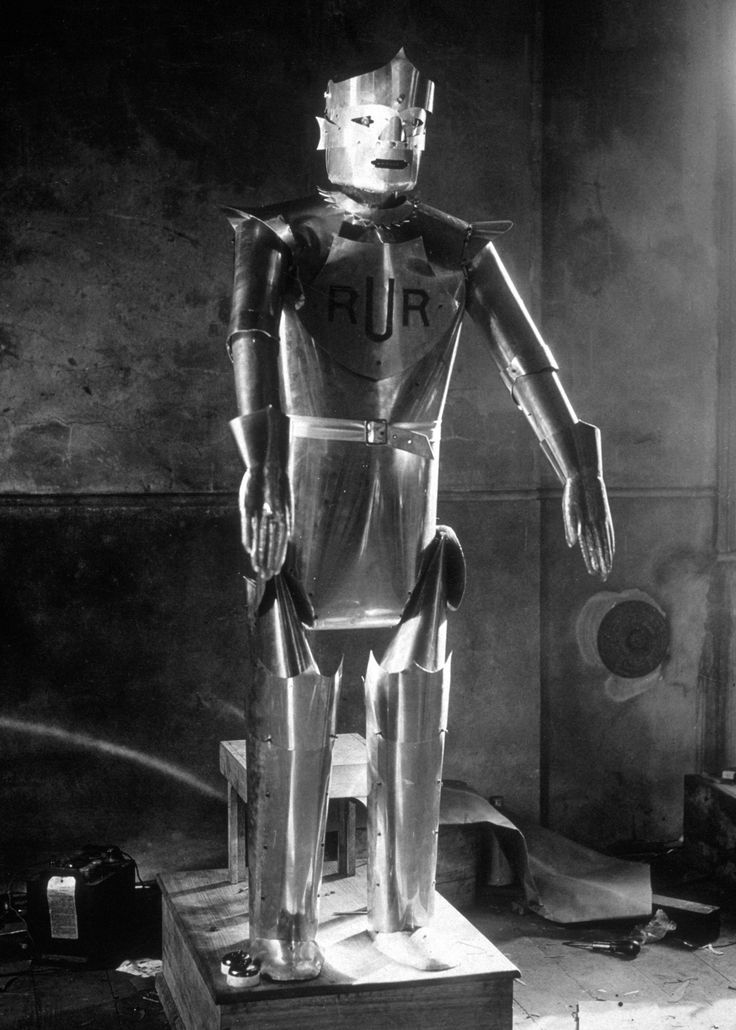 Примеры включают OpenMRS и EMRBots.
Примеры включают OpenMRS и EMRBots.
Как работает и устроен робот-пылесос?
Всё еще сомневаетесь в эффективности роботов-пылесосов? Узнайте, как устроен робот-пылесос и какие умные технологии используются в современных гаджетах для уборки! С роботом-пылесосом можно убирать, находясь в отпуске, а мыть полы – лежа на диване. Хватит тратить время на беготню по комнатам с ручным пылесосом. Разобраться с особенностями работы роботов-пылесосов, режимами уборки и преимуществами умных помощников поможет статья.
Умный помощник из будущего – кто изобрел робот-пылесос?
Сегодня практически каждый желающий может позволить себе жить проще использовать достижения умных технологий каждый день. В 1956 году робот-пылесос можно было встретить разве что на страницах фантастических романов (произведение Роберта Хайнлайна «Дверь в лето» считается первым, где упоминается данный вид гаджета) или чуть позже в книжках о приключениях Незнайки. А сегодня достаточно зайти в любой магазин электроники — умных роботов целые полки на любой вкус и цвет. По данным Википедии считается, что первым кто изобрел робот-пылесос, который официально представили на рынке, был американец Джо Джоун из компании iRobot. С момента появления его робот-пылесоса Roomba в 2002 году официально начался век существования и развития умных помощников по хозяйству.
По данным Википедии считается, что первым кто изобрел робот-пылесос, который официально представили на рынке, был американец Джо Джоун из компании iRobot. С момента появления его робот-пылесоса Roomba в 2002 году официально начался век существования и развития умных помощников по хозяйству.
Как устроен робот-пылесос?
Робот-пылесос создан для упрощения процесса уборки и освобождения свободного времени. Одна из популярных среди пользователей фирм-производителей роботов компания ECOVACS ROBOTICS разрабатывает крутых и функциональных роботов Deebot, начиная от базовых моделей без влажной уборки, таких как N76S, до мультифункционального PRO 930, который имеет в комплекте дополнительный ручной пылесос.
Интересно: какие товары Ecovacs одержали победу на международной выставке техники Red Dot Awards
Чаще всего корпус девайса круглый до 40 см в диаметре, высотой от 7 см и выше, в зависимости от модели (пылесосы из серии Slim обладают ультратонким корпусом, чтобы убирать под низкой мебелью, куда обычный пылесос никогда не доберется).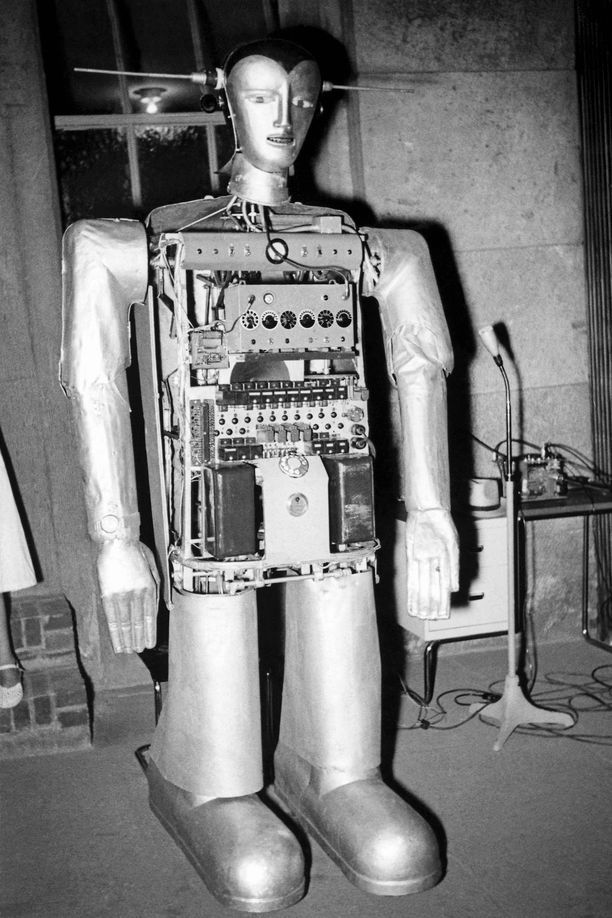 Вверху находится кнопка включения – при ее нажатии активируется автоматический режим уборки. Внутри – мотор, аккумулятор и контейнер, куда пылесос собирает пыль. Передняя часть корпуса оборудована бампером с эффектом амортизации для безопасного контакта с мебелью и предметами интерьера. Кроме того, все роботы DEEBOT оборудованы датчиками антистолкновения и антипадения (робот заранее идентифицирует препятствие на пути и снижает скорость, а также чувствует перепады высоты и не пересекает безопасную границу во время уборки возле ступенек).
Вверху находится кнопка включения – при ее нажатии активируется автоматический режим уборки. Внутри – мотор, аккумулятор и контейнер, куда пылесос собирает пыль. Передняя часть корпуса оборудована бампером с эффектом амортизации для безопасного контакта с мебелью и предметами интерьера. Кроме того, все роботы DEEBOT оборудованы датчиками антистолкновения и антипадения (робот заранее идентифицирует препятствие на пути и снижает скорость, а также чувствует перепады высоты и не пересекает безопасную границу во время уборки возле ступенек).
Читайте также о линейке роботов с технологией влажной уборки OZMO
Снизу у робота находятся:
- Две боковые щетки для сметания пыли
- Основная V-образная щетка/насадка прямого всасывания
- Колеса
- Крепления для микрофибры (в моделях с влажной уборкой)
- Микрофибра
Большая часть современных роботов-пылесосов могут работать в двух режимах: сухая и влажная очистка. То есть умный помощник не только очистит полы от шерсти и пыли, но и освежит все напольные покрытия. Без ведер, швабр, грязных тряпок и луж на паркете. Технология подачи воды на микрофибру позволяет расходовать ее экономно и при этом не оставлять разводов. Все новые роботы DEEBOT с функцией влажной уборки оборудованы обновленной технологией Smart OZMO, которая делает мытье полов еще проще.
То есть умный помощник не только очистит полы от шерсти и пыли, но и освежит все напольные покрытия. Без ведер, швабр, грязных тряпок и луж на паркете. Технология подачи воды на микрофибру позволяет расходовать ее экономно и при этом не оставлять разводов. Все новые роботы DEEBOT с функцией влажной уборки оборудованы обновленной технологией Smart OZMO, которая делает мытье полов еще проще.
Смарт- навигация и управление
Когда активируется процесс уборки девайс предварительно сканирует помещение, строит карту 3-D карту дома ( технология Smart NAVI) и начинает двигаться в соответствии с оптимальным маршрутом. В более ранних моделях, где отсутствует функция сканирования помещения лазером использована технология Smart MOVE, которая позволяет роботу передвигаться без пропусков и делать очистку полов качественно. Одной зарядки аккумулятора в среднем хватает на 110 минут работы. Если территория большая, то гаджет без посторонней помощи идентифицирует необходимость вернуться на док-станцию.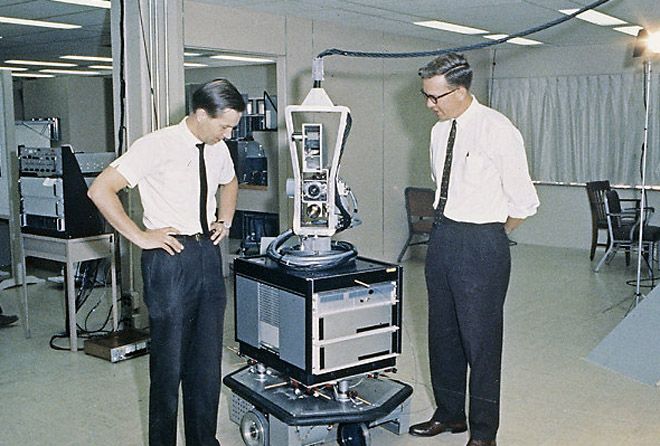 Когда робот пылесос сам заканчивает уборку, он не забывает о том, где остановился и продолжает с той же точки после восстановления ресурсов батареи. В зависимости от необходимости можно менять насадки всасывания: с устранением шерсти домашних идеально справляется насадка прямого всасывания, так волосы не наматываются на щетку и не спутываются. Пыль и грязь собирается в контейнере, который периодически нужно очищать. Во время уборки пылесос как бы повторяет типичные человеческие телодвижения (по технологии Smart Motion) и проходит по одному участку несколько раз, чтобы не оставить ни одной пылинки.
Когда робот пылесос сам заканчивает уборку, он не забывает о том, где остановился и продолжает с той же точки после восстановления ресурсов батареи. В зависимости от необходимости можно менять насадки всасывания: с устранением шерсти домашних идеально справляется насадка прямого всасывания, так волосы не наматываются на щетку и не спутываются. Пыль и грязь собирается в контейнере, который периодически нужно очищать. Во время уборки пылесос как бы повторяет типичные человеческие телодвижения (по технологии Smart Motion) и проходит по одному участку несколько раз, чтобы не оставить ни одной пылинки.
Детальнее о том, как робот-пылесос ориентируется в пространстве
Управлять девайсом можно с помощью кнопки на корпусе, дистанционного пульта (в некоторых моделях) и через приложение на смартфоне. Кроме стандартного автоматического режима, есть ряд дополнительных функций, которые значительно облегчают жизнь.
Только представьте, на улице сырая погода, к вам пришли гости и наследили в прихожей – теперь остатки земли и песка быстро разнесутся по всему дому, если ничего не предпринять. Вместо того, чтобы идти на балкон за веником и подметать, либо доставать из шкафа пылесос, включать его в розетку и вручную ликвидировать последствия, вы можете расслабиться за чашечкой кофе, нажать пару кнопок на смартфоне и робот-пылесос за несколько минут в локальном режиме удалит все загрязнения. Вам даже вставать не придется! Удобно же.
Вместо того, чтобы идти на балкон за веником и подметать, либо доставать из шкафа пылесос, включать его в розетку и вручную ликвидировать последствия, вы можете расслабиться за чашечкой кофе, нажать пару кнопок на смартфоне и робот-пылесос за несколько минут в локальном режиме удалит все загрязнения. Вам даже вставать не придется! Удобно же.
Основные режимы умной уборки:
- Автоматический (при его выборе робот отправляется убирать всю территорию квартиры от и до)
- Локальная очистка ( при необходимости прибраться в определенном месте: только в кухне или на террасе)
- По периметру (гаджет пройдется только вдоль стен и по углам, где больше всего оседает пыль)
- Режим “МАX” (двойное усиление силы всасывания при сильных загрязнениях).
Робота можно легко настроить под себя, установить уборку по расписанию, отметить виртуальные стены (территории которые робот будет обходить стороной) и даже делать уборку удаленно! Да-да, хоть прямо лежа на пляже в отпуске – если хотите вернуться в чистую и не запыленную квартиру, с роботом-пылесосом этот вопрос решается на раз два. Почти во всех базовых роботах-пылесосах DEEBOT уже доступно голосовое управление (пылесос в несколько шагов коннектится с колонками Alexa или Google Home).
Почти во всех базовых роботах-пылесосах DEEBOT уже доступно голосовое управление (пылесос в несколько шагов коннектится с колонками Alexa или Google Home).
Уборка происходит без участия проводов. Робот не требует контроля за уровнем заряда аккумулятора. Часто у пользователей возникает вопрос, можно ли робот-пылесос все время ставить на базу. Да, можно, но в этом нет необходимости, поскольку после каждого цикла уборки он сам автоматически возвращается на зарядную станцию.
Современные роботы-пылесосы устроены максимально понятно и просто – с управлением справится даже ребенок! Такой помощник станет незаменимым в каждом доме, особенно у владельцев домашних животных. С каждым годом ассортимент умных помощников расширяется, а функционал совершенствуется. В каталоге Ecovacs Robotics вы можете без проблем подобрать девайс, который подойдет вам по функционалу и ценовой категории.
робот | Определение, история, использование, типы и факты
Робот-гуманоид
Просмотреть все СМИ
- Ключевые люди:
- Родни Брукс
- Похожие темы:
- реабилитационный робот
три закона робототехники
андроид
AIBO
механический манипулятор
Просмотреть весь связанный контент →
Резюме
Прочтите краткий обзор этой темы
робот , любая машина с автоматическим управлением, которая заменяет человеческие усилия, хотя она может не напоминать людей по внешнему виду или выполнять функции, подобные человеческим. В более широком смысле робототехника — это инженерная дисциплина, занимающаяся проектированием, строительством и эксплуатацией роботов.
В более широком смысле робототехника — это инженерная дисциплина, занимающаяся проектированием, строительством и эксплуатацией роботов.
Понятие об искусственных людях появилось раньше письменной истории ( см. автомат ), но современный термин Робот происходит от чешского слова robota («принудительный труд» или «крепостной»), использованного в пьесе Карела Чапека руб. (1920). Роботы в пьесе были созданы людьми, бессердечно эксплуатируемыми владельцами фабрик, пока они не восстали и в конечном итоге не уничтожили человечество. Были ли они биологическими, как монстр из « Франкенштейна » (1818) Мэри Шелли, или механическими, не уточнялось, но механическая альтернатива вдохновила поколения изобретателей на создание электрических гуманоидов.
Узнайте о трех законах робототехники Айзека Азимова
Посмотреть все видео к этой статье
Слово робототехника впервые появилось в научно-фантастическом рассказе Айзека Азимова Runaround (1942). Наряду с более поздними рассказами Азимова о роботах он установил новый стандарт правдоподобия в отношении вероятной сложности разработки разумных роботов и технических и социальных проблем, которые могут возникнуть. Runaround также содержал знаменитые Три закона робототехники Азимова:
Наряду с более поздними рассказами Азимова о роботах он установил новый стандарт правдоподобия в отношении вероятной сложности разработки разумных роботов и технических и социальных проблем, которые могут возникнуть. Runaround также содержал знаменитые Три закона робототехники Азимова:
1. Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинен вред.
2. Робот должен подчиняться приказам, отдаваемым ему людьми, за исключением случаев, когда такие приказы противоречат Первому закону.
3. Робот должен защищать свое существование до тех пор, пока такая защита не противоречит Первому или Второму закону.
В этой статье прослеживается развитие роботов и робототехники. Для получения дополнительной информации о промышленном применении, см. артикул автоматика.
Викторина «Британника»
Гаджеты и технологии: правда или вымысел?
Виртуальная реальность используется только в игрушках? Использовались ли когда-нибудь роботы в бою? От компьютерных клавиатур до флэш-памяти — узнайте о гаджетах и технологиях в этой викторине.
Посмотрите, как мехатроника помогает инженерам создавать высокотехнологичные продукты, такие как промышленные роботы
Просмотреть все видео к этой статье
Машины с гибким поведением и некоторыми физическими свойствами, хотя и не гуманоидными, были разработаны для промышленности. Первым стационарным промышленным роботом был программируемый Unimate, гидравлическая тяжелая рука с электронным управлением, которая могла повторять произвольные последовательности движений. Он был изобретен в 1954 американским инженером Джорджем Деволом и был разработан компанией Unimation Inc., основанной в 1956 году американским инженером Джозефом Энгельбергером. В 1959 году прототип Unimate был представлен на литейном заводе General Motors Corporation в Трентоне, штат Нью-Джерси. В 1961 году Condec Corp. (после покупки Unimation в предыдущем году) поставила на завод GM первого в мире робота для производственной линии; у него была неприятная (для людей) задача по удалению и укладке горячих металлических деталей из машины для литья под давлением. Оружие Unimate продолжает разрабатываться и продаваться лицензиатами по всему миру, при этом автомобильная промышленность остается крупнейшим покупателем.
Оружие Unimate продолжает разрабатываться и продаваться лицензиатами по всему миру, при этом автомобильная промышленность остается крупнейшим покупателем.
Узнайте, как использование роботизированного конвейера для генетики бактерий делает работу ученых в Университетском колледже Корка менее сложной и более эффективной.
Просмотреть все видео к этой статье. в конце 1960-х и 1970-х годах в Массачусетском технологическом институте (MIT) и в Стэнфордском университете, где они использовались с камерами в исследованиях роботизированных рук и глаз. Виктор Шейнман из Стэнфорда, работая с Unimation для GM, разработал первую такую руку, используемую в промышленности. Называется PUMA (программируемая универсальная машина для сборки), они используются с 1978 для сборки автомобильных компонентов, таких как приборные панели и фары. PUMA широко копировалась, и ее потомки, большие и маленькие, до сих пор используются для легкой сборки в электронике и других отраслях промышленности. С 1990-х годов небольшие электрические манипуляторы стали важными инструментами в лабораториях молекулярной биологии, поскольку они точно манипулируют массивами пробирок и пипетируют сложные последовательности реагентов.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту.
Подписаться сейчас
Мобильные промышленные роботы также впервые появились в 1954. В том же году беспилотная электрическая тележка производства Barrett Electronics Corporation начала возить грузы по продуктовому складу в Южной Каролине. Такие машины, получившие название AGV (автоматически управляемые транспортные средства), обычно перемещаются по излучающим сигналы проводам, проложенным в бетонных полах. В 1980-х годах AGV приобрели микропроцессорные контроллеры, которые обеспечивали более сложное поведение, чем те, которые обеспечиваются простым электронным управлением. В 1990-х годах для использования на складах стал популярным новый метод навигации: AGV, оснащенные сканирующим лазером, триангулируют свое положение, измеряя отражения от фиксированных ретрорефлекторов (по крайней мере, три из которых должны быть видны из любого места).
Хотя промышленные роботы впервые появились в США, бизнес там не процветал.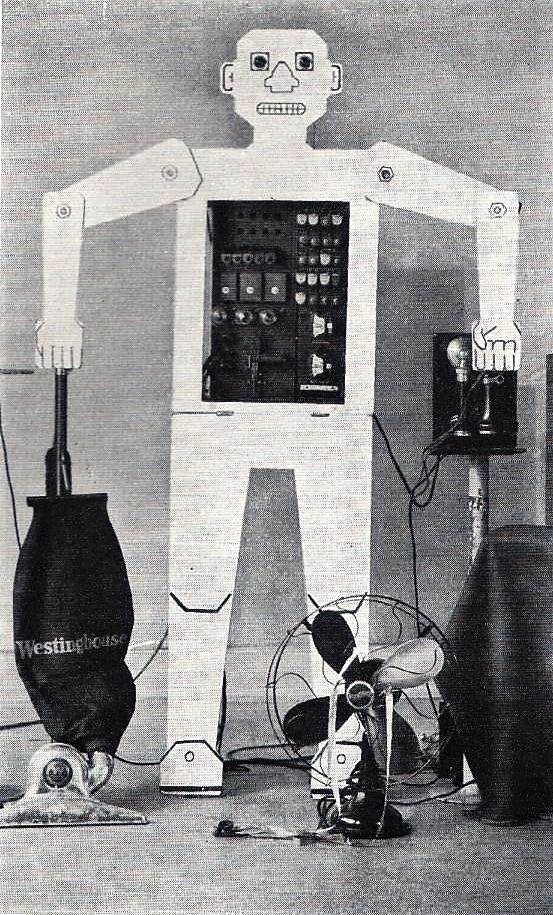 Unimation была приобретена Westinghouse Electric Corporation в 1983 году и через несколько лет закрылась. Cincinnati Milacron, Inc., другой крупный американский производитель гидравлических манипуляторов, продал свое подразделение робототехники в 1990 году шведской фирме Asea Brown Boveri Ltd. единственная оставшаяся американская фирма. Иностранные лицензиаты Unimation, особенно в Японии и Швеции, продолжают работать, и в 19В 80-е годы другие компании в Японии и Европе начали активно выходить на рынок. Перспектива старения населения и связанная с этим нехватка рабочих рук побудили японских производителей экспериментировать с передовой автоматизацией еще до того, как она принесла явную отдачу, открыв рынок для производителей роботов. К концу 1980-х годов Япония, возглавляемая подразделениями робототехники Fanuc Ltd., Matsushita Electric Industrial Company, Ltd., Mitsubishi Group и Honda Motor Company, Ltd., была мировым лидером в производстве и использовании промышленных роботов. Высокая стоимость рабочей силы в Европе также способствовала внедрению роботов-заменителей: в 2001 году количество установок промышленных роботов в Европейском Союзе впервые превысило количество установок в Японии9.
Unimation была приобретена Westinghouse Electric Corporation в 1983 году и через несколько лет закрылась. Cincinnati Milacron, Inc., другой крупный американский производитель гидравлических манипуляторов, продал свое подразделение робототехники в 1990 году шведской фирме Asea Brown Boveri Ltd. единственная оставшаяся американская фирма. Иностранные лицензиаты Unimation, особенно в Японии и Швеции, продолжают работать, и в 19В 80-е годы другие компании в Японии и Европе начали активно выходить на рынок. Перспектива старения населения и связанная с этим нехватка рабочих рук побудили японских производителей экспериментировать с передовой автоматизацией еще до того, как она принесла явную отдачу, открыв рынок для производителей роботов. К концу 1980-х годов Япония, возглавляемая подразделениями робототехники Fanuc Ltd., Matsushita Electric Industrial Company, Ltd., Mitsubishi Group и Honda Motor Company, Ltd., была мировым лидером в производстве и использовании промышленных роботов. Высокая стоимость рабочей силы в Европе также способствовала внедрению роботов-заменителей: в 2001 году количество установок промышленных роботов в Европейском Союзе впервые превысило количество установок в Японии9. 0003
0003
Отсутствие надежной функциональности ограничило рынок промышленных и сервисных роботов (созданных для работы в офисе и дома). С другой стороны, игрушечные роботы могут очень надежно развлекаться, не выполняя задачи, а механические разновидности существуют уже тысячи лет. ( См. автомат.) В 1980-х годах появились игрушки с микропроцессорным управлением, которые могли говорить или двигаться в ответ на звуки или свет. Более продвинутые в 1990-х распознавали голоса и слова. В 19В 99 году корпорация Sony представила похожего на собаку робота по имени AIBO с двумя дюжинами моторов для приведения в действие его ног, головы и хвоста, двумя микрофонами и цветной камерой, координируемой мощным микропроцессором. Более реалистичные, чем когда-либо прежде, AIBO гонялись за цветными мячами и научились узнавать их владельцев, исследовать и адаптироваться. Хотя первые AIBO стоили 2500 долларов, первоначальный тираж в 5000 экземпляров сразу же был распродан через Интернет.
Греческий миф о Талосе, первом роботе — Адриенн Майор
У вас отключен JavaScript
Для оптимальной работы включите JavaScript.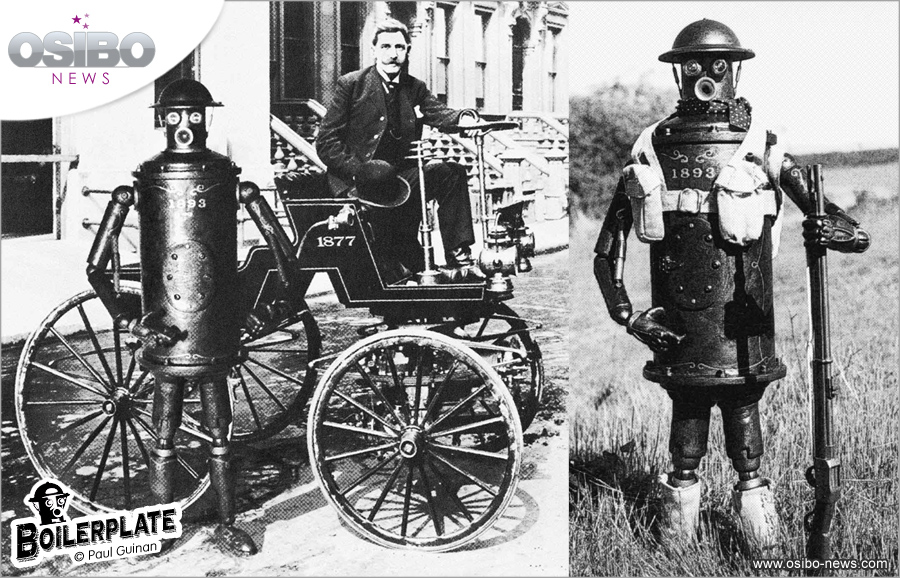 Вот как
Вот как
Перейти к основному содержанию
Поиск
Зарегистрируйтесь или войдите
Хотите ежедневно получать по электронной почте планы уроков, охватывающие все предметы и возрастные группы?
Узнать больше
Давайте начнем…
Гефест, бог технологий, усердно работал над своим самым гениальным изобретением. Он создавал новую систему защиты для царя Миноса, который хотел, чтобы в его островном королевстве Крит было меньше вторжений. Но смертных охранников и обычного оружия было недостаточно, поэтому дальновидный бог придумал нового неукротимого защитника. Адриенна Майор погружается в миф о Талосе: первом роботе.
Дополнительные ресурсы для изучения
Делиться:
Настройте этот урок
Создайте и поделитесь новым уроком на основе этого.
Об анимации TED-Ed
Анимации TED-Ed содержат слова и идеи педагогов, воплощенные в жизнь профессиональными аниматорами. Вы педагог или аниматор, заинтересованный в создании анимации TED-Ed? Назовите себя здесь »
Вы педагог или аниматор, заинтересованный в создании анимации TED-Ed? Назовите себя здесь »
Познакомьтесь с создателями
- Педагог Адриенн Майор
- Режиссер Наталия Фариа, Келвин Лима
- Рассказчик Александра Панцер
- Продюсер Фелипе Гроссо, Одирлей Сейшас, Лиана Вианна
- Редактор Наталья Фариа
- Композитор Наталья Фариа
- Старший аниматор Наталья Фариа, Кельвин Лима
- Художник-раскадровщик Наталья Фариа
- Арт-директор Кельвин Лима
- Иллюстратор Кельвин Лима, Вини Перейра
- Дизайнер персонажей Кельвин Лима, Вини Перейра, Люк Пассос
- Аниматор Вини Перейра, Люк Пассос
- Звукорежиссер Матеус Виттманн
- Композитор Матеус Виттманн
- Директор по производству Герта Ксело
- Редакционный продюсер Алекс Розенталь
- Ассоциированный продюсер Бетани Катмор-Скотт
- Ассоциированный редактор-продюсер Дэн Квартлер
- Редактор сценария Изольда Гиллеспи
- Проверка фактов Эден Гирма
05:06
Литература и языки
продолжительность урока 05:06
525 991 просмотр
05:10
Литература и языки
продолжительность урока 05:10
434 698 просмотров
04:39
Литература и языки
продолжительность урока 04:39
1 236 536 просмотров
04:57
Литература и языки
продолжительность урока 04:57
983 269 просмотров
Модальный вход
Нажмите «Зарегистрироваться», если вам нужно создать бесплатную учетную запись TED-Ed.